YKSIASKELMENETELMIEN TARKKUUS JA STABIILIUS RAKENTEIDEN TRANSIENTTIANALYYSISSA
|
|
|
- Santeri Uotila
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
1 YKSIASKELMENETELMIEN TARKKUUS JA STABIILIUS RAKENTEIDEN TRANSIENTTIANALYYSISSA Jarmo Niemi Rakenteiden Mekaniikka 1 Vol. 20 No s TIIVISTELMA: Artikkelissa tutkitaan yleisen yksiaskelmenetelmaperheen parametrien suhdetta menetelman ominaisuuksiin rakenteiden transienttianalyysissa. Tarkastelu rajoittuu lineaarisiin 1 symmetrisiin ja vaimentamattomiin systeemeihin. Tarkasteltavia ominaisuuksia ovat stabiilius 1 suppenevuus 1 tarkkuus ja yliampuminen. Parametreille j ohdetaan ehdot 1 j otka niiden on taytettava 1 j ott a menetelma olisi toista astetta 1 ehdoitta stabiili 1 ylimpia ominaismuotoja vaimentava ja tarkasti alimpia ominaismuotoja integroiva. Naiden kriteerien suhteen arvioidaan menetelmaperheeseen kuuluvia tunnettuj a menetelmia 1 kuten kollokaatio- j a a - menetelmia 1 seka eraita uusia menetelmaperheen jasenia. vertailun perusteella optimaalisia menetelmia ovat a-menetelmiin kuuluvat seka esitetyt uudet menetelmat. Wilsonin e ja Newmarkin menetelmat eivat sensijaan osoittaudu suositeltaviksi. JOHDANTO Tama tyo on suoraa jatkoa artikkelille / 1/ jossa esitettiin painotettujen jaannosten menetelmaan ja ns. Newmarkin approksimaatioon perustuva yksiaskelmenetelmaperhe rakenteiden transienttianalyysiin. Esitetty menetelma yhdistaa artikkelisarjassa / / esitetyt SSpj ja beta-m menetelmat 1 joista ensimmainen on painotettujen jaannosten menetelman yleistys aikaintegroinnissa sovellettuna yksiaskelproseduuriksi j a j alkimmainen Newmarkin menetelman yleistys. Tassa tyossa tutki taan SS5 menetelmaperheen parametrien vaikutusta menetelman tarkkuuteen 1 stabiiliuuteen ja yliampumiseen (engl. overshoot) systeemin p1s1mman ominaisvarahdysajan merkittavasti ylittavilla aika-askeleilla. Tarkastelu rajoittuu lineaarisiin symmetrisiin systeemeihin ja se seuraa lahteissa / 6/ ja / 7/ kaytettya metodia. 23

2 Rakenteen 1ineaariseen 1iikeyhta1oon = f (t ) (1 ) sovel1ettuna sss menete1maperhe johdettiin 1ahteessa / 1/. toisin merkinnoin tarkeimmat tu1okset ovat: Hieman Algoritmi Parametrit ai I i=l sl sl yl D= a3m + a 4 lltc + a 5 t~t2k 1 ( 2b ) v1 vo + llt [( l - Y) a 0 + Ya 1 J I ( 2c ) u1 = uo + t~tv 0 + llt2 [(.l - s ) a: 0 + sa 1 J ( 2d ) 2 p = (1 - a 1 ) fo + a 1fl ( 2e ) jossa a "" ql v ""ql u "" ql lit = ti +1 - ti ja 1iiketi1avektoreiden a1aindeksi vii ttaa vastaavasti integrointiaskeleen.alku- j a 1oppupaahan. Kuormitus on interpo1oitu aika-aske1een alueessa 1ineaarisesti reuna-arvoistaan. Tau1ukossa 1 on esitetty muutamia t unnettuja menetelmia 1 jotka sisa1tyvat sss menetelmaperheeseen. Lahempi tarkastelu osoittaa 1 etta Ray1eighin vaimennuksen 1 c = am + bk 1 tapauksessa yhtalon (1) ominaismuotoihin jako OJ ja aikadiskretisointi AD kommunikoivat kuvan 1 mukaisesti. Taten integrointimenete1man analyysi voidaan keskittaa yhden vapausasteen yhta1oon.. 2 1> + 2 E;wcp + w cj> = ' (t ) 1 ( 3 ) Esitetaan yhtalon (3) aikadiskretisointi tavanomaisessa muodossa ( 4 ) 24

3 Taulukko 1. SSS perheen vastaavuudet muihin menetelmiin. Mer:.ete1rna ja pararnetrit SS32 /2/ 1 s=.,. () Vastaavan SSS mencte1rnan pararnetrien arvot 1 r=z -Kollokaatiomenete1rnat / 6/ s k a2 = 62 k Wi1sonin 6 rnenete1rna 1 1 8k=6 rk=z 6 k= 6 w Tr.apetsisaanto 1 1 8k'=4 rk=z 6 k= 1 1 B = 4 1 = 2 as = = -1 (beta-2 rnenete1rna / 3/ ) Newmarkin rnenete1rn~ f\= en yk= YN ek=l a- rnenete1rnat / 6/ Brn Ym am B = BN y = YN CXJ=1 ~ az = 1 a3 = -1 a4 =-yn as= - BN e. = Bm y = ')' CIJ=1+ am a2= ex 1 rn ex, =, -... u4=-(l+a )y m rn exs=-(1+ exm)bm Huomautus: sss menetelmaperhe antaa taulukon mukaisilla parametrin sovituksilla a-menetelmaa vastaavan menetelman vain, kun vaimennus c = o. Lahteessa / 6/ on kuitenkin osoitettu, etta a - menetelma on lokaalin diskretointivirheen suhteen toista astetta ainoastaan tassa tapauksessa. sen sijaan taulukon 1 mukainen sss perheesta saatava modifioitu -menetelma on toista astetta myos vaimennetuille systeemeille kuten jaljempana ilmenee. 25
' CIJ=1+ am a2= ex 1 rn ex, =, -.")
4 M~ + cq + Kq = 1 i5 Ca 1-ao) = (M+a 1 6tc+ 2 a 2 6t-K) a OJ rt "~ AD + (C+a 1 MK)v 0 + Kto - p i5" = a 3M + a 4 Mc + a 5 M 2 K + + = - 'I' o' Cai -a0) = ct+a 1 6tr+~a 2 6t 2 A ) a AD r =rz~. w. J u o ii 1 1 OJ + (f+ a 1 M A)'v 0 + "A- - p' 2 r TI = a 3 T + a M"f + a = w. J M A 1 I = r 1 J Kuva 1. Operaattoreiden OJ ja AD ovat diagonaalimatriiseja. kommutointi. Matriisit I, r ja A -.. jossa Xi = (ui l'ltvi l'lt2ai) T, jossa U"" ~, V""' ~ ja a<><~ ja vektori Li on riippuvainen ulkoisesta kuormituksesta o/ (t ). Tarkastel1aan homogeenista tapausta o/ (t ) =O; Li = o. Eri yksiaskelmenetelmia voidaan nyt tutkia tarkastelemalla niiden vahvistusmatriisia (engl. amplification matrix) a. sss menetelmille matriisi A on 1,2 t; L 1 lji 1 D D D + a- 1 + a- p; n2 lji2 lji 1 y- + y- D 1 + y- D D ( 5 ) Q2 lji2 D D 1 + lji 1 D
 T, jossa U\"\" ~, V\"\"' ~ ja a<><~ ja vektori Li on riippuvainen ulkoisesta kuormituksesta o/ (t ). Tarkastel1aan homogeenista tapausta o/ (t ) =O; Li = o.")
5 jossa on kaytetty merkintoja c\tw 1 ' 2 Nopeudet ja kiihtyvyydet voidaan eliminoida yhtalosta (4) soveltamalla sita toistuvasti perakkaisille aika-askeleille. Talloin saadaan ekvivalentti moniaskelmenetelma (homogeeniselle yhtalolle 1 "E "" OJ (6) jossa kertoimet A11 A 2 ja A 3 ovat matriisin A invariantit A 1 trace (A) 1 A 2 matriisin A paaalideterminanttien summa A3 "" det (A). Niille saadaan lausekkeet 1 n 2 W~ A1 2 + (Y - -)- + _L. + A31 2 D D A2 1 + (y AJ 1 + (8 J n 2 + 1jl2 + 2A z)j) D 1 n2 ljil - y + 2) D D '"' (y 1)!2 27
 1 A 2 matriisin A paaalideterminanttien summa A3 \"\" det (A).")
6 KONSISTENSSI Maaritelman mukaisesti (ks. 171) menetelman lokaali diskretointivirhe ( 7 ) Kehittamalla $ t:n suhteen Taylorin sarjaksi saadaan a = T Tillti"72<j> (i } (t ) i=o jossa + ( 8 ) i > o. Menetelma ( 6) on konsistentti astetta k j os a -+ 0 ( lltk) kun lit-+ 0 ja k > o. Menetelman konsistenssi takaa siis diskretisoinnin lokaalisen, asymptoottisen lahestymisen kohti oikeaa ratkaisua kun aikaaskelta rajatta pienennetaan. Dahlquist on osoittanut lahteessa 191, etta lineaarinen moniaskelmenetelma, kuten (6) joka on ehdoitta stabiili ei voi asteeltaan ylittaa kahta. Tarkastellaan vahintaan toista astetta olevia menetelmia ja asetetaan m = 3 yhtalossa (8). Virheelle a saadaan lauseke ( 9 ) Sijoittamalla Ti:n, i = 1. 3 lausekkeet yhtaloon (9 ) saadaan ehto, joka parametrien on toteutettava, jotta menetelma olisi toista astetta: (10) Kollokaatiomenetelmilla ehto (10) saadaan taulukon 1 sijoitusten avulla lahteissa 161 j a 171 esi tettyyn muotoon y = i Taul ukon 1 1 mukaisille modifioiduille., -menetelmille ehto on v + a m = 2. 28
 joka on ehdoitta stabiili ei voi asteeltaan ylittaa kahta.")
7 STABIILIUS JA SUPPENEVUUS Menetelma (4) on ehdoitta stabiili jos ratkaisux ei kasva rajatta kun t + "'ja ne(o,c:o). Tunnetusti tama ehto toteutuu vain jos matriisin A spektraalisade P = max { I A 1 I, I A 2 I, I A 3 I }.::. 1 ( 11) ja yhtasuuruuden tapauksessa maksimi on yksikasitteinen. Edella A 1, A 2 ja AJ ovat matriisin A ominaisarvot, jotka saadaan karakteristisen yhtalon ratkaisuina. Jos yhtalossa (11) yhtasuuruutta ei sallita, on menetelma asymptoottisesti stabiili ja ratkaisu x + o, kun t + "'. Jos ehto (11) on voimassa vain kun rl<n 0, jossa n c on stabiiliusraja, on menetelma ehdollisesti stabiili. ll'utkitaan menete1man parametrien suhdetta stabiiliuuteen. A:n ominaisarvot ovat yleensa kompleksisia, joten stabiiliusehto (11) edellyttaa ominaisarvojen sijaitsevan kompleksitason yksikkoympyrassa. 'Muunnos A = (1. + z) I ( 1-z) (13) kuvaa kompleksitason yksikkoympyran kompleksitason vasemmalle puo- 1iskolle ja stabiiliusehto saadaan muotoon Re(z).2_0. Karakteristinen yhta16 (12) muuttuu muotoon 1 (1-z) 3 + (3 - A1 - A2 + JA3)Z + (1 - A1 + A2 - A3)] = 0 (14) Koska nimittajan nollakohta z = 1 ei sijaitse komp1eksitason vasemma11a puo1itasolla, riittaa kun tarkastel1aan yhtalon (14) vasemman puo1en osoittajaa. Hurwitzin kriteerin mukaan osoittaja11a on juuret, joi11a on negatiivinen reaa1iosa vain jos ehdot 29
 yhtasuuruutta ei sallita, on menetelma asymptoottisesti stabiili ja ratkaisu x + o, kun t + \"'.")
8 1 - A1 + A2 - A3 > 0 ' (15a) 1 + A1 + A2 + A3 > 0 ' (15b) 3 + A1 - A2-3A3 > o, (15c) 3 - A1 - A2 + 3A3 > 0 ' (15d) i - A2 + A1A3 - A~ > 0 (15e) toteutuvat. Vaimentamattomassa tapauksessa, E; =0, stabiiliusehdot (15) toteutuvat kaikille r.e ( O,oo ) (ehdoitta stabiilius), jos parametreille on voimassa epayhtalot 4a 5 + 2(3 - y + a 2 + 2r c< 1 - Ll 1 :._ 0, (16a) (16b ) + ys - y 2 + y -!_ B-!_.:_ (16c) Jos yhtaloihin (16) sijoitetaan taulukon 1 mukaisesti kollokaatiomenetelmaa vastaavat parametrien arvot, saadaan lahteessa /71 esitetty stabiiliusehto ( y = ~ ) 2e~ - 1 ek ---::, < (3 <.:..:.. 4 ( 28~ - 1) - k- 2 (ek + 1) (17) l Jos edelleen asetetaan Wilsonin 8 menetelmaa vastaavasti Pk =-6-, saadaan ehto 8 8~ - 128~ + 2.:_ o, josta saadaan r atkaistua tunnettu ehdoitta stabiiliuden kriteer i Wilsonin e menetelmalle: 'Jw > 1, ~ -menetelmille stabiiliusehdot saadaan muotoon 0 ~ am ~ - ~, 1 a S m ~4-2 Menetelman globaali diskretointivirhe. a (t ) = 4> (t ) - u (t ). (18 ) 30
 Jos yhtaloihin (16) sijoitetaan taulukon 1 mukaisesti kollokaatiomenetelmaa vastaavat parametrien arvot, saadaan lahteessa /71 esitetty stabiiliusehto ( y = ~ ) 2e~ - 1 ek ---::,.")
9 Menetelman sanotaan olevan suppeneva astetta k, jos kiintealle ajan hetkelle t 6 + O (ll tk), kun l'l t + 0 ja k > 0. Suppenevuus on siis olennaisen tarkea aikadiskretisoinnin ominaisuus 7 se takaa diskreetin ratkaisun globaalin, asymptoottisen lahestymisen kohti tarkkaa ratkaisua aika-askelta rajatta pidennettaessa. Edellisessa kohdassa maaritelty konsistenssi takasi lahestymisen ainoastaan lokaalisesti. Lahteessa / 8/ on osoitettu, ettamenetelman konsistenssista ja stabiiliudesta seuraa suppenevuus. Suppenevuuden asteluku on talloin sama kuin konsistenssin asteluku. TARKKUUS JA NUMEERINEN VAIMENNUS Yhtaloiden ( 6 ) esittaa muodossa 3 Un = E i=l ja (12 ) perusteella diskreetti ratkaisu voidaan (19 ) jos ominaisarvot ovat erilliset. Kertoimien Ci, i = 1. 3, arvo maaraytyy alkuarvojen perusteella. Yhtalon (19 ) perusteella voidaan paatella, etta menetelman asymptoottinen kayttaytyminen kun t + " ', riippuu spektraalisateesta p 7 mita pienempi p sita nopeammin ratkaisu lahestyy nollaa. Rakenteiden dynamiikassa diskreettiin n vapausasteiseen liikeyhtaloon (1) paadytaan, kun jatkuvan rakenteen liiketilaa approksimoidaan n-ulotteisessa funktioavaruudessa. Useimmiten tama tehdaan kayttamalla elementtimenetelmaa, jolloin kantafunktiot ovat paloittain jatkuvasti derivoituvia polynomeja. Ainoastaan alimmat ominaistaajuudet ja -muodot vastaavat talloin kohtuullisen tarkasti jatkuvan rakenteen ominaisparej a. Aikaintegroinnissa pyri taan integroimaan mahdollisimman tarkasti vain alimpien ominaismuotojen osuus vasteesta ja ylimpien, virheellisten ominaismuotojen osuus vasteesta pyritaan numeerisesti vaimentamaan mahdollisimman tehokkaasti. Spektraalisade kuvaa taman numeerisen vaimennuksen tehokkuutta. Tutkitaan toista astetta olevia, ehdoitta stabiileja menetelmia, kun t~t, ja siten n, lahestyy nollaa tai aaretonta. Yksinkertaisuu- 31

10 den vuoksi raj oi tutaan vaimentamattomaan tapaukseen, t; = o. Kun,\2+0 j atetaan invaranttien Ai lausekkeista rl : n suhteen toisen a steen termit pienina suureina pais, jolloin saadaan Huornataan, etta pararnetri a 3 maarittaa rnenetelrnan asymptoottisen kayttaytymisen aika- askelta rajatta pienennettaessa. Sijoittamalla ylla olevat lausekkeet karakteristiseen yhtaloon ( 12 ) nahdaan, etta \1,2 + 1 ja > kun a Menetelma Hihestyy tiilloin aikaaskelta pienennettaessa trapets isaantoa, jolla on lahteessa / 9/ todistettu olevan pienin lokaali virhe ehdoitta stabiilien moniaskelmenetelrnien joukossa. Koska pienilla aika- askeleen arvoilla menetelrnan tarkkuus on oleellinen kriteeri, tarkastellaan jatkossa vain rnenetelrnia, joille a 3 = - 1. Talloin ehto (10) I joka maaritteli rnenetelrnan olevan toista astetta sen toteutuessa, saadaan rnuotoon y ( 2 0) Ehdoitta stabiiliuden ehdot (16) rnuuttuvat rnuotoon ( 21a) a a 2 + f3 + 2 a1 - a 1-1 ~ 0 { 21b) r~:n Kun rl + oo, ovat invarianttien Ai lausekkeissa rnerkitsevia vain toista astetta olevat terrnit ja saadaan 1 + ( P - 1 )/a 5, jossa Stabiiliusehdoiksi ( 21 ) saadaan ylla olevin rnerkinnoin a 5.::_ - {, 1 - P ::._ a 5 ::._ ~ - ~P. Taulukossa 2 on esitetty spektraalisateen rninirniarvo Prn i. n ja sita vastaava P:n arvo Prnin pararnetrin a 5 32

11 funktiona. Spektraa1isatee11e saadaan pienin arvo kun a 5 ~ 0,3. Kun ~ s 1ahestyy stabii1iusrajaa - 0,25 tai miinus aaretonta, kasvaa spektraa1isade kohti ykkosta ja menete1ma ei vaimenna numeerisesti y1impien ominaismuotojen osuutta vasteesta. Tau1ukko 2. Spektr~a1isateen minimiarvo p min j a si ta vastaava P: n arvo Pmin parametrin a 5 funktiona. as Pmin p. m1n - 0, , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , ,65117 Suppenevi11e menete1mi11e on o1emassa positiivinen vakio ~ siten, etta kun n((o, ~) niin matriisi11a A on komp1eksikonjugaatti ominaisarvopari Al 2 ja reaa1inen ominaisarvo A 3, jotka toteuttavat epayhta1on A ' 3 < A 1,2 ~ 1 /7/. Ratkaisu (19) voidaan ta11oin kirjoittaa muotoon (22) 33

12 missa Al,2 = A ± Bi I w = n f lit 1 n = arctan (B/ A) Pienilla aika- askelen arvoilla diskreetin ratkaisun voidaan katsoa vastaavan tarkkaa ratkaisua systeemille 1 jolla on hieman suurempi vaimennus ja jaykkyys kuin alkuperaisella systeemilla. Numeerinen vaimennussuhde ~ ja suhteellinen jakson ajan virhe (T T)/T, jossa T = 2nj w ja T = 2nj w 1 ovat yleisimmin kaytetyt suureet menetelman tarkkuuden kuvaamiseen pienilla aika- askelen arvoilla (Q<Q ) 1 jolloin tarkkuus on oleellinen. YLIAMPUMINEN Yleensa usean vapausasteen systeemeissa aika-askel valitaan siten, etta korkeimmilla taajuuksilla suhde llt/ T on huomattavasti suurempi kuin yksi. Edellisessa kohdassa todettiin spektraalisateen maarittavan ratkaisun kayttaytymisen suurilla aika- askeleen arvoilla. Spektraalisateen ollessa pienempi kuin yksi ratkaisu lahestyy nollaa kun t + oo, Wilsonin e menetelman yhteydessa on kuitenkin huomattu ensimmaisten aika- askelten aikana huomattavaa yliampumista, eli varahtelyn amplitudi on monisatakertainen tarkkaan arvoon verrattuna. Menetelman yliampumisella tarkoitetaan tassa juuri tata amplitudin menetelmasta johtuvaa vahvistumista tarkkaa arvoa suuremmaksi /7/. Talloin ensimmaisten aika-askelten aikana ylimpien ominaismuotojen osuus vasteesta 1 joka pyrittiin virheellisena laskennallisesti kokonaan suodattamaan pois 1 saattaa olla huomattava ja siten vaikuttaa ratkaisevasti koko laskennan tarkkuuteen. Vaikka yhtalon (19 ) mukaisesti spektraalisateen ollessa pienempi kuin yksi tama virheellinen osuus vasteesta melko nopeasti suodattuu, niin transienttianalyysissa, jossa juuri ensimmaisten aika- askelten osuus on kiin- 34
 1 jolloin tarkkuus on oleellinen.")
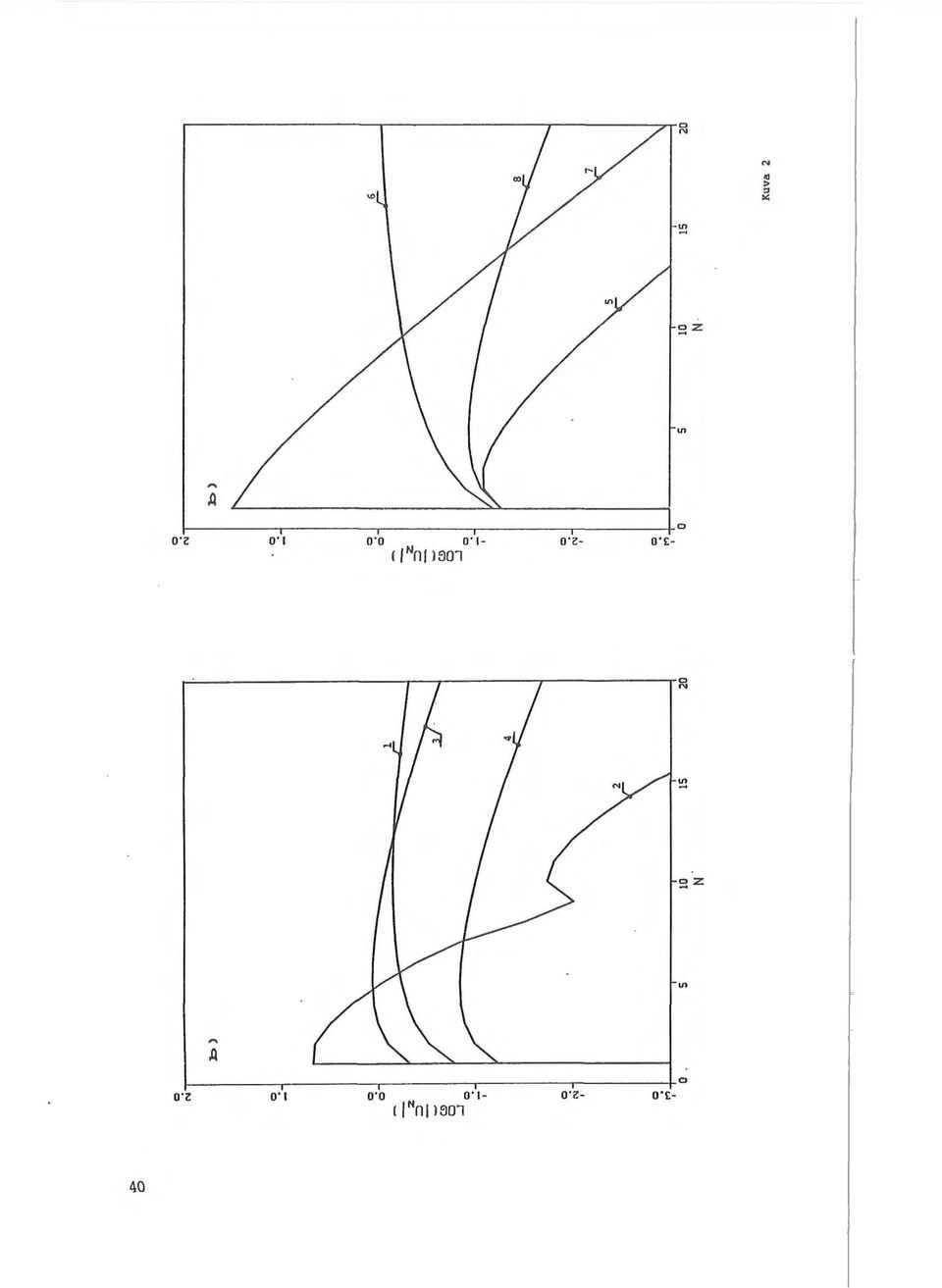
13 nostavin, ei voida kayttaa voimakkaasti yliampuvaa menetelmaa, kun halutaan kontrolloida virhetta. Lahteesta / 71 on todettu ehdoitta stabiilien menetelmien yliampumisen selittyvan silla, etta vahvistusmatriisin A normi kuvaa ratkaisun kayttaytymista ensimmaisten aika-askelten aikana suurilla nt:n arvoilla. Koska stabiililla matriisilla voi olla mielivaltaisen suuri normi, ei menetelman stabiilius esta sen yliampumista. Tarkastellaan yliampumista ensimmaisen, merkittavimman aika-askeleen aikana. Yhtaloiden (4) ja (5) perusteella saadaan ratkaisu ensimmaisen aika-askeleen jalkeen n 2 ~1 2 -Gj:) n )uo + (1 + Yi) 2 ) ntv 2 0 g2 ~'1 ;jj v1 = '(Yo - n 2 - Y0 n 2 )uo/ nt + (1 + Y"j} )v 0 (23a) (23b) Kun n + "' saadaan (24a) (24b) Menetelma ei nain ollen ole yliampuva, jos ehdot B = CL5 CL2 CLS -a ets = 2 (et1-2 )a2 (25a) (25b) (25c) ovat voimassa. Ainoa ehdoitta stabiili, toista astetta oleva kasiteltavan menetelmaperheen jasen, joka ei ole yliampuva on siten trapetsisaanto. Koska trapetsisaanto ei kuitenkaan vaimenna ylimpia ominaisumuotoja, vaan sen spektraalisade on yksi kaikilla aika-askeleen arvoilla, tarkastellaan menetelmia, jotka eivat ole neliollisesti yliampuvia. Talloin on ehdon (25a) ja toisen ehdoista (25b) tai (25c) oltava voimassa. Modifioidut et-menetelmat ovat tata tyyppia: ne toteuttavat ehdot (25a) ja (25b). Kaytannossa myos naita lahella olevat menetelmat, joissa ehdot (25b) ja (25c) toteutuvat molemmat likimaaraisesti voivat tulla kysymykseen. Kuvassa 2 on esitetty 35

14 rnuutarnien rnenetelrnien antarna ratkaisu yhtalolle ( 3) 1 kun 1; = o I 'l' (t) = o ja llt/t = 10. Menetelrnien pararnetrit on annettu taulukossa 3. Taulukko 3. Vertailtavien SS5 rnenetelrnien pararnetrit. nro Ctl a2. 03 as B y 1 0, , , , , , , , , , , , , , , , , ' , , , o, , , ( a-menete1ma a = -0,1 ) 5 0, , , , , , ( a-menete1ma a = -0,3 ) 6 1, , , , , ( trapetsisaanto ) 7 1, , , , , , ( Wi1sonin 8 menete1ma 8 = 1,42 ) 8 1, , , , , , ( Newmarkin menete1ma 6 = 0,3025 ' y = 0,6 ) Koska aika-askel on kyrnmenkertainen jaksonaikaan nahden, oleellista ei ole tietenkaan rnenetelrnan tarkkuus 1 vaan sen nurneerinen vairnennus ja yliarnpurninen. Kuvissa yliarnpurninen tapahtuu, kun vasteen logaritrni on positiivinen. Menetelrnan nurneerisen vairnennuksen tehokkuus nakyy siina nopeudessa 1 jossa vasteen logaritrni pienenee. Kuvista 2a) voidaan paatella 1 etta Wilsonin e rnenetelma (rnenetelrna nurnero 7) on ainoa rnenetelrna 1 joka on vahvasti yliarnpuva siirtyrnavasteen osalta, kun alkuarvoina on annettu siirtyrna. Nopeusvaste on talloin lievasti yliarnpuva rnyos rnenetelmilla 4, 5 ja s, joskin tassakin suhteessa Wilsonin e rnenetelrna on huonoin. Parhaiten nurneerisesti vairnentavia nailla alkuarvoilla ovat rnenetelmat 2 ja 5. 36
 5 0,700000 0,700000-1,000000-0,295750 0,422500 0,800000 ( a-menete1ma a = -0,3 ) 6 1,000000 1,000000-1,000000-0,250000 0.")
15 Kun alkuarvona on annettu alkunopeus nahdaan kuvista 2b), etta Wilsonin a menetelma on tassakin tilanteessa pahiten yliapuva siirtymavasteen suhteen. Lievasti yliampuva on myos menetelma 2, jota saattoi odottaa, koska menetelman parametrit eivat tayta ehtoa (25b). Nopeusvasteen osalta mikaan menetelmista ei ole yliampuva. Parhaiten numeerisesti vaimentavia ovat jalleen menetelmat 2 ja 5. MENETELMAPERHEEN PARAMETRIEN VALINTA Valittaessa optimaalista menetelmaa liikeyhtalon (1) ratkaisemiseksi kaytetaan edella olevan analyysin perusteella seuraavia kriteereita: 1. Menetelma on toista astetta. 2. Menetelma on ehdoitta stabiili. 3. Menetelma vaimentaa tehokkaasti ylimpien omianismuotojen osuuden vasteesta. 4. Menetelmalla on pienilla aika-askeleilla mahdollisimman pieni numeerinen vaimennussuhde ~ ja jaksonajan suhteellinen virhe (T - T) / T. 5. Menetelma ei ole neliollisesti yliampuva. Nama kriteerit eivat ole toisistaan riippumattomia ja ne ovat osittain ristiriitaisia. On myos huomautettava, etta ne ovat tarkoitetut kaytettaviksi lahinna elementtimenetelmalla syntyvien suurien ja ainoastaan alimpien ominaismuotojen osalta tarkkojen systeemien integrointiin: yhden tai muutaman vapausasteen systeemeille ainoastaan kriteeri 4 on relevantti ja integrointiin voidaan kayttaa ehdollisesti stabiileja korkea-asteisia menetelmia. Edella esitetyn perusteella on kasiteltavan menetelmaperheen parametrien toteutettava seuraavat ehdot, jotta kriteerit toteutuisivat: 37
 ratkaisemiseksi kaytetaan edella olevan analyysin perusteella seuraavia kriteereita: 1.")
16 0"1 o o o l - 1 INn psol o z- 0 "[- r r---71~------~ r ~ r ~ ~ , r ro o z 0"1 o o o l- o z- 0"[- 1 1Nn1 JSol 38

17 r r , r ~.. N >.;l o z 0"1 o o o l- ( INA I l50l o z- 0" - ~ ~ , , r o z- 0" - o z 0"1 o o o l- ( I Nfll l50l 39

18 ,Q r , ~ r , o z o 1 o o o t- o z- o c- ( INnl JS01 o z o 1 o o o t- ( INn I JS01 o z- o c- 40
19 o o o l- ( I NAI lejol 0" - ~ r f r ~ o z 0"1 o o o l- o z- 0" - ( INA I lejol 41

20 2. Ehdot (21 ). 3. as ~ - 0,30 ja p ~ 1, a 3 = Ehto (25a) ja toinen ehdoista (25b) tai (25c). Kuvassa 3 on esitetty spektraalisade, kuvassa 4 nurneerinen vairnennussuhde ja kuvassa 5 suhteellinen jakson ajan virhe rnuutarnalle optirnaaliselle rnenetelrnalle ja vertailun vuoksi rnyos eraille rnuille tunnetuille rnenetelrnille. -~ , CD 0 w Cl :a: td en, -o...j a: a: a:::., f-. ~0 w Cl.. en.,. 0.., 0 N ,, ~~----~ o.o 1.0 LOGIH/T) 2.0 J.O Kuva 3 42

21 Kuvasta 3 voidaan nahda jo kuvissa 2 ilmennyt menetelmien 2 ja 5 hyva numeerinen vaimennus. Trapetsisaanto (menetelma numero 6 ) ei ole lainkaan numeerisesti vaimentava, vaan sen spektraalisade on yksi kaikilla aika-askeleen arvoilla. Kuvista 4 ja 5 nahdaan, etta Wilsonin menetelmaa ja Newmarkin menetelmaa (menetelma numero 8 ) lukuunottamatta muut menetelmat ovat kohtuullisen tarkkoja, jos suhde ll t / T on pienempi kuin 0,1 jota voidaan pitaa kyseisen subteen ylarajana pyrittaessa tarkkaan integrointiin. Vertailemalla kuvia 3, 4 j a 5 nahdaan myos, etta menetelman parempi numeerinen vaimennus saavutetaan tarkkuuden kustannuksella: tarkin menetelma on trapetsisaanto, joka ei ole lainkaan numeerisesti vaimentava. Taulukon 3 mukaisen Newmarkin ID "'0..c!nt'l cno " :oc;i c: c: Ql E -' 0 >!;! 0 0 Q o.o c.t/t Kuva 4 43
22 mene t e 1 man par ametrit e 1 'va"t toteuta ehtoa (10), eika menetelma nain ol1en ole toista astetta, mika nakyy myos kuvasta 4. "' N co (-. ;:-: '"',o t: oUT Kuva 5 YHTEENVETO Tyossa on analysoitu lahteessa / 1/ esitetyn menetelmaperheen parametrien suhdetta menetelman ominaisuuksiin rakenteiden transienttianalyysissa. Esitetyn perusteella voidaan vertail1a tunnettujen kollokaatio- ja a - menetelmaperheiden ominaisuuksia, seka naihin kuulumattomia perheen menetelmia. Ensinnakin tassa tyossa, samoin kuin lahteissa / 6/ ja / 7/, on kaynyt ilmi, ettei Wilsonin o-menetelma 44
23 monessakaan suhteessa veda vertoja a-menetelmille tai edes kaikille kollokaatioperheen menetelmille. Onkin katsottava lahinna perusteettomaksi sen edelleenkin suuri suosio rakenteiden dynamiikan yleisena integrointimenetelmana. Toiseksi on huomattava, ettei myoskaan toinen yle i sesti kaytetty menetelma, Newmarkin menetelma, ole kovin suositeltava, koska se palautuu trapetsisaannoksi niilla parametrien l.l N j a Y N arvoilla j j a i, j oilla se on toista astetta j a ehdoi tta stabiili, eika nain ollen vaimenna lainkaan ylimpia ominaismuotoja. Menetelmaperheesta ovat sen s ijaan suositeltavia taulukon 3 viisi ensimmaista menetelmaa, joista menetelmat numero 4 ja 5 ovat tunnettuja - menetelmia ja kolme ensimmaista uusia menetelmia. Tassa tyossa on paaosin tutkittu vain vaimentamattomia systeemeja. Talloin parametrin a 4 arvo ei vaikuta menetelman ominaisuuksiin. Vaimennetuille systeemeille voidaan parametreille a 4 valita arvo l - menetelmien mukaisesti a 4 = - a 1 y. LAHDELUETTELO / 1/ Niemi, J. I Painotettujen jaannosten nakokulma yksiaskelmenetelmiin. SS5 menetelmaperhe. Rakenteiden Mekaniikka, 18 (1985) 3, s / 2/ Zienkiewicz, o.c., Wood, W.L., Hines, N.W., A Unified Set of Single Step Algorithms, Part 1: General Formulation and Applications. IJNME, 20 (1984 ), s / 3/ Wood, W.L., A Unified Set of Single Step Algorithms, Part 2: Theory. IJNME, 20 (1984 ), s / 4/ Katona, M.G., Zienkiewicz, o.c., A Unified Set of Single Step Algorithms, Part 3: The Beta- m Method, A Generalization of The Newmark Scheme. IJNME, 21 (1985), s / 5/ Wood, W.L., A Unified Set of Single Step Algorithms, Part 4: Backward Error Analysis Applied to the Dynamic Vibration Equation. IJNME, 23 (1986), s / 6/ Heppler, G.R., Hansen, J.S., Time Integration of the Equations of Motion of a structural System Including Damping. AIAA Journal, 21 (1983 ) 9, s
24 / 71 Hilber, H.M., Hughes, T.J.R., Collocation, Dissipation and "Overshoot" for Time Integration Schemes in structural Dynamics. Earthq. Eng. and struct. Dyn., 6(1978 ), s / 8/ Stetter, H.J., Analysis of Discretization Methods for Ordinary Differential Equations. Springer-Verlag. Berlin-Heidelberg New York / 9/ Dahlquist, G., On Accuracy and Unconditional Stability of Linear Multistep Methods for Second Order Differential Equations. BIT, 18 (1978), s Jarmo Niemi, dipz.ins., Tampereen teknizlinen korkeakoulu, TekniZlisen mekaniikan Zaitos 46
Ominaisarvot ja ominaisvektorit 140 / 170
 Ominaisarvot ja ominaisvektorit 140 / 170 Seuraavissa luvuissa matriisit ja vektori ajatellaan kompleksisiksi, ts. kertojakuntana oletetaan olevan aina kompleksilukujoukko C Huomaa, että reaalilukujoukko
Ominaisarvot ja ominaisvektorit 140 / 170 Seuraavissa luvuissa matriisit ja vektori ajatellaan kompleksisiksi, ts. kertojakuntana oletetaan olevan aina kompleksilukujoukko C Huomaa, että reaalilukujoukko
1 Di erentiaaliyhtälöt
 Taloustieteen mat.menetelmät syksy 2017 materiaali II-5 1 Di erentiaaliyhtälöt 1.1 Skalaariyhtälöt Määritelmä: ensimmäisen kertaluvun di erentiaaliyhtälö on muotoa _y = F (y; t) oleva yhtälö, missä _y
Taloustieteen mat.menetelmät syksy 2017 materiaali II-5 1 Di erentiaaliyhtälöt 1.1 Skalaariyhtälöt Määritelmä: ensimmäisen kertaluvun di erentiaaliyhtälö on muotoa _y = F (y; t) oleva yhtälö, missä _y
Värähdysliikkeet. q + f (q, q, t) = 0. q + f (q, q) = F (t) missä nopeusriippuvuus kuvaa vaimenemista ja F (t) on ulkoinen pakkovoima.
 = 0. q + f (q, q) = F (t) missä nopeusriippuvuus kuvaa vaimenemista ja F (t) on ulkoinen pakkovoima.") Torstai 18.9.2014 1/17 Värähdysliikkeet Värähdysliikkeet ovat tyypillisiä fysiikassa: Häiriö oskillaatio Jaksollinen liike oskillaatio Yleisesti värähdysliikettä voidaan kuvata yhtälöllä q + f (q, q, t)
Torstai 18.9.2014 1/17 Värähdysliikkeet Värähdysliikkeet ovat tyypillisiä fysiikassa: Häiriö oskillaatio Jaksollinen liike oskillaatio Yleisesti värähdysliikettä voidaan kuvata yhtälöllä q + f (q, q, t)
5 Differentiaaliyhtälöryhmät
 5 Differentiaaliyhtälöryhmät 5.1 Taustaa ja teoriaa Differentiaaliyhtälöryhmiä tarvitaan useissa sovelluksissa. Toinen motivaatio yhtälöryhmien käytölle: Korkeamman asteen differentiaaliyhtälöt y (n) =
5 Differentiaaliyhtälöryhmät 5.1 Taustaa ja teoriaa Differentiaaliyhtälöryhmiä tarvitaan useissa sovelluksissa. Toinen motivaatio yhtälöryhmien käytölle: Korkeamman asteen differentiaaliyhtälöt y (n) =
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 10 1 Funktion monotonisuus Derivoituva funktio f on aidosti kasvava, jos sen derivaatta on positiivinen eli jos f (x) > 0. Funktio on aidosti vähenevä jos sen derivaatta
Matematiikan tukikurssi Kurssikerta 10 1 Funktion monotonisuus Derivoituva funktio f on aidosti kasvava, jos sen derivaatta on positiivinen eli jos f (x) > 0. Funktio on aidosti vähenevä jos sen derivaatta
1 Ominaisarvot ja lineaariset di erenssiyhtälöt
 Taloustieteen mat.menetelmät syksy 27 materiaali II-4 Ominaisarvot ja lineaariset di erenssiyhtälöt. Idea a b Ajatellaan di erenssiyhtälöä z k+ Az k, A : Jos A olisi diagonaalimatriisi, eli b c, niin muuttujat
Taloustieteen mat.menetelmät syksy 27 materiaali II-4 Ominaisarvot ja lineaariset di erenssiyhtälöt. Idea a b Ajatellaan di erenssiyhtälöä z k+ Az k, A : Jos A olisi diagonaalimatriisi, eli b c, niin muuttujat
Luku 4. Derivoituvien funktioiden ominaisuuksia.
 1 MAT-1343 Laaja matematiikka 3 TTY 1 Risto Silvennoinen Luku 4 Derivoituvien funktioiden ominaisuuksia Derivaatan olemassaolosta seuraa funktioille eräitä säännöllisyyksiä Näistä on jo edellisessä luvussa
1 MAT-1343 Laaja matematiikka 3 TTY 1 Risto Silvennoinen Luku 4 Derivoituvien funktioiden ominaisuuksia Derivaatan olemassaolosta seuraa funktioille eräitä säännöllisyyksiä Näistä on jo edellisessä luvussa
läheisyydessä. Piirrä funktio f ja nämä approksimaatiot samaan kuvaan. Näyttääkö järkeenkäyvältä?
 BM20A5840 - Usean muuttujan funktiot ja sarjat Harjoitus 1, Kevät 2017 1. Tunnemme vektorit a = [ 1 2 3 ] ja b = [ 2 1 2 ]. Laske (i) kummankin vektorin pituus (eli itseisarvo, eli normi); (ii) vektorien
BM20A5840 - Usean muuttujan funktiot ja sarjat Harjoitus 1, Kevät 2017 1. Tunnemme vektorit a = [ 1 2 3 ] ja b = [ 2 1 2 ]. Laske (i) kummankin vektorin pituus (eli itseisarvo, eli normi); (ii) vektorien
Matematiikan tukikurssi, kurssikerta 3
 Matematiikan tukikurssi, kurssikerta 3 1 Epäyhtälöitä Aivan aluksi lienee syytä esittää luvun itseisarvon määritelmä: { x kun x 0 x = x kun x < 0 Siispä esimerkiksi 10 = 10 ja 10 = 10. Seuraavaksi listaus
Matematiikan tukikurssi, kurssikerta 3 1 Epäyhtälöitä Aivan aluksi lienee syytä esittää luvun itseisarvon määritelmä: { x kun x 0 x = x kun x < 0 Siispä esimerkiksi 10 = 10 ja 10 = 10. Seuraavaksi listaus
3.6 Su-estimaattorien asymptotiikka
 3.6 Su-estimaattorien asymptotiikka su-estimaattorit ovat usein olleet puutteellisia : ne ovat usein harhaisia ja eikä ne välttämättä ole täystehokkaita asymptoottisilta ominaisuuksiltaan ne ovat yleensä
3.6 Su-estimaattorien asymptotiikka su-estimaattorit ovat usein olleet puutteellisia : ne ovat usein harhaisia ja eikä ne välttämättä ole täystehokkaita asymptoottisilta ominaisuuksiltaan ne ovat yleensä
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt
 MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Differentiaaliyhtälöt. osa 2 Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 1 R. Kangaslampi Matriisihajotelmista
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Differentiaaliyhtälöt. osa 2 Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 1 R. Kangaslampi Matriisihajotelmista
Numeeriset menetelmät TIEA381. Luento 6. Kirsi Valjus. Jyväskylän yliopisto. Luento 6 () Numeeriset menetelmät / 33
 Numeeriset menetelmät / 33") Numeeriset menetelmät TIEA381 Luento 6 Kirsi Valjus Jyväskylän yliopisto Luento 6 () Numeeriset menetelmät 4.4.2013 1 / 33 Luennon 6 sisältö Interpolointi ja approksimointi Polynomi-interpolaatio: Vandermonden
Numeeriset menetelmät TIEA381 Luento 6 Kirsi Valjus Jyväskylän yliopisto Luento 6 () Numeeriset menetelmät 4.4.2013 1 / 33 Luennon 6 sisältö Interpolointi ja approksimointi Polynomi-interpolaatio: Vandermonden
MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat.
 MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat. Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät 2016 1 Perustuu
MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat. Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät 2016 1 Perustuu
2 Osittaisderivaattojen sovelluksia
 2 Osittaisderivaattojen sovelluksia 2.1 Ääriarvot Yhden muuttujan funktiolla f(x) on lokaali maksimiarvo (lokaali minimiarvo) pisteessä a, jos f(x) f(a) (f(x) f(a)) kaikilla x:n arvoilla riittävän lähellä
2 Osittaisderivaattojen sovelluksia 2.1 Ääriarvot Yhden muuttujan funktiolla f(x) on lokaali maksimiarvo (lokaali minimiarvo) pisteessä a, jos f(x) f(a) (f(x) f(a)) kaikilla x:n arvoilla riittävän lähellä
1 Rajoittamaton optimointi
 Taloustieteen matemaattiset menetelmät 7 materiaali 5 Rajoittamaton optimointi Yhden muuttujan tapaus f R! R Muistutetaan mieleen maksimin määritelmä. Funktiolla f on maksimi pisteessä x jos kaikille y
Taloustieteen matemaattiset menetelmät 7 materiaali 5 Rajoittamaton optimointi Yhden muuttujan tapaus f R! R Muistutetaan mieleen maksimin määritelmä. Funktiolla f on maksimi pisteessä x jos kaikille y
Numeeriset menetelmät TIEA381. Luento 5. Kirsi Valjus. Jyväskylän yliopisto. Luento 5 () Numeeriset menetelmät / 28
 Numeeriset menetelmät / 28") Numeeriset menetelmät TIEA381 Luento 5 Kirsi Valjus Jyväskylän yliopisto Luento 5 () Numeeriset menetelmät 3.4.2013 1 / 28 Luennon 5 sisältö Luku 4: Ominaisarvotehtävistä Potenssiinkorotusmenetelmä QR-menetelmä
Numeeriset menetelmät TIEA381 Luento 5 Kirsi Valjus Jyväskylän yliopisto Luento 5 () Numeeriset menetelmät 3.4.2013 1 / 28 Luennon 5 sisältö Luku 4: Ominaisarvotehtävistä Potenssiinkorotusmenetelmä QR-menetelmä
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt
 MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Matriisinormi, häiriöalttius Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 14 R. Kangaslampi matriisiteoriaa Matriisinormi
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Matriisinormi, häiriöalttius Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 14 R. Kangaslampi matriisiteoriaa Matriisinormi
Numeeriset menetelmät TIEA381. Luento 8. Kirsi Valjus. Jyväskylän yliopisto. Luento 8 () Numeeriset menetelmät / 35
 Numeeriset menetelmät / 35") Numeeriset menetelmät TIEA381 Luento 8 Kirsi Valjus Jyväskylän yliopisto Luento 8 () Numeeriset menetelmät 11.4.2013 1 / 35 Luennon 8 sisältö Interpolointi ja approksimointi Funktion approksimointi Tasainen
Numeeriset menetelmät TIEA381 Luento 8 Kirsi Valjus Jyväskylän yliopisto Luento 8 () Numeeriset menetelmät 11.4.2013 1 / 35 Luennon 8 sisältö Interpolointi ja approksimointi Funktion approksimointi Tasainen
k=0 saanto jokaisen kolmannen asteen polynomin. Tukipisteet on talloin valittu
 LIS AYKSI A kirjaan Reaalimuuttujan analyysi 1.6. Numeerinen integrointi: Gaussin kaavat Edella kasitellyt numeerisen integroinnin kaavat eli kvadratuurikaavat Riemannin summa, puolisuunnikassaanto ja
LIS AYKSI A kirjaan Reaalimuuttujan analyysi 1.6. Numeerinen integrointi: Gaussin kaavat Edella kasitellyt numeerisen integroinnin kaavat eli kvadratuurikaavat Riemannin summa, puolisuunnikassaanto ja
H(s) + + _. Ymit(s) Laplace-tason esitykseksi on saatu (katso jälleen kalvot):
 + + _. Ymit(s) Laplace-tason esitykseksi on saatu (katso jälleen kalvot):") ELEC-C3 Säätötekniikka 5. laskuharjoitus Vastaukset Quiz: Luennon 4 luentokalvojen (luku 4) lopussa on esimerkki: Sähköpiiri (alkaa kalvon 39 tienoilla). Lue esimerkki huolellisesti ja vastaa seuraavaan:
ELEC-C3 Säätötekniikka 5. laskuharjoitus Vastaukset Quiz: Luennon 4 luentokalvojen (luku 4) lopussa on esimerkki: Sähköpiiri (alkaa kalvon 39 tienoilla). Lue esimerkki huolellisesti ja vastaa seuraavaan:
4 Korkeamman kertaluvun lineaariset differentiaaliyhtälöt
 4 Korkeamman kertaluvun lineaariset differentiaaliyhtälöt 4.1 Homogeeniset lineaariset differentiaaliyhtälöt Homogeeninen yhtälö on muotoa F(x, y,, y (n) ) = 0. (1) Yhtälö on lineaarinen, jos se voidaan
4 Korkeamman kertaluvun lineaariset differentiaaliyhtälöt 4.1 Homogeeniset lineaariset differentiaaliyhtälöt Homogeeninen yhtälö on muotoa F(x, y,, y (n) ) = 0. (1) Yhtälö on lineaarinen, jos se voidaan
Lyhyt yhteenvetokertaus nodaalimallista SÄTEILYTURVAKESKUS STRÅLSÄKERHETSCENTRALEN RADIATION AND NUCLEAR SAFETY AUTHORITY
 Lyhyt yhteenvetokertaus nodaalimallista SÄTELYTUVAKESKUS STÅLSÄKEHETSCENTALEN ADATON AND NUCLEA SAFETY AUTHOTY Ei enää tarkastella neutronien kulkua, vaan työn alla on simppeli tuntemattoman differentiaaliyhtälöryhmä
Lyhyt yhteenvetokertaus nodaalimallista SÄTELYTUVAKESKUS STÅLSÄKEHETSCENTALEN ADATON AND NUCLEA SAFETY AUTHOTY Ei enää tarkastella neutronien kulkua, vaan työn alla on simppeli tuntemattoman differentiaaliyhtälöryhmä
Ominaisarvo-hajoitelma ja diagonalisointi
 Ominaisarvo-hajoitelma ja a 1 Lause 1: Jos reaalisella n n matriisilla A on n eri suurta reaalista ominaisarvoa λ 1,λ 2,...,λ n, λ i λ j, kun i j, niin vastaavat ominaisvektorit x 1, x 2,..., x n muodostavat
Ominaisarvo-hajoitelma ja a 1 Lause 1: Jos reaalisella n n matriisilla A on n eri suurta reaalista ominaisarvoa λ 1,λ 2,...,λ n, λ i λ j, kun i j, niin vastaavat ominaisvektorit x 1, x 2,..., x n muodostavat
2v 1 = v 2, 2v 1 + 3v 2 = 4v 2.. Vastaavasti ominaisarvoa λ 2 = 4 vastaavat ominaisvektorit toteuttavat. v 2 =
 TKK, Matematiikan laitos Pikkarainen/Tikanmäki Mat-1.1320 Matematiikan peruskurssi K2 Harjoitus 12, A=alku-, L=loppuviikko, T= taulutehtävä, P= palautettava tehtävä, W= verkkotehtävä 21. 25.4.2008, viikko
TKK, Matematiikan laitos Pikkarainen/Tikanmäki Mat-1.1320 Matematiikan peruskurssi K2 Harjoitus 12, A=alku-, L=loppuviikko, T= taulutehtävä, P= palautettava tehtävä, W= verkkotehtävä 21. 25.4.2008, viikko
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 6 Sarjojen suppeneminen Kiinnostuksen kohteena on edelleen sarja a k = a + a 2 + a 3 + a 4 +... k= Tämä summa on mahdollisesti äärellisenä olemassa, jolloin sanotaan
Matematiikan tukikurssi Kurssikerta 6 Sarjojen suppeneminen Kiinnostuksen kohteena on edelleen sarja a k = a + a 2 + a 3 + a 4 +... k= Tämä summa on mahdollisesti äärellisenä olemassa, jolloin sanotaan
Algebra. 1. Ovatko alla olevat väittämät tosia? Perustele tai anna vastaesimerkki. 2. Laske. a) Luku 2 on luonnollinen luku.
 Luku 2 on luonnollinen luku.") Algebra 1. Ovatko alla olevat väittämät tosia? Perustele tai anna vastaesimerkki. a) Luku on luonnollinen luku. b) Z c) Luvut 5 6 ja 7 8 ovat rationaalilukuja, mutta luvut ja π eivät. d) sin(45 ) R e)
Algebra 1. Ovatko alla olevat väittämät tosia? Perustele tai anna vastaesimerkki. a) Luku on luonnollinen luku. b) Z c) Luvut 5 6 ja 7 8 ovat rationaalilukuja, mutta luvut ja π eivät. d) sin(45 ) R e)
3 Raja-arvo ja jatkuvuus
 3 Raja-arvo ja jatkuvuus 3. Raja-arvon käsite Raja-arvo kuvaa funktion kättätmistä jonkin lähtöarvon läheisdessä. Raja-arvoa tarvitaan toisinaan siksi, että funktion arvoa ei voida laskea kseisellä lähtöarvolla
3 Raja-arvo ja jatkuvuus 3. Raja-arvon käsite Raja-arvo kuvaa funktion kättätmistä jonkin lähtöarvon läheisdessä. Raja-arvoa tarvitaan toisinaan siksi, että funktion arvoa ei voida laskea kseisellä lähtöarvolla
Matriisi-vektori-kertolasku, lineaariset yhtälöryhmät
 Matematiikan peruskurssi K3/P3, syksy 25 Kenrick Bingham 825 Toisen välikokeen alueen ydinasioita Alla on lueteltu joitakin koealueen ydinkäsitteitä, joiden on hyvä olla ensiksi selvillä kokeeseen valmistauduttaessa
Matematiikan peruskurssi K3/P3, syksy 25 Kenrick Bingham 825 Toisen välikokeen alueen ydinasioita Alla on lueteltu joitakin koealueen ydinkäsitteitä, joiden on hyvä olla ensiksi selvillä kokeeseen valmistauduttaessa
Jos siis ohjausrajoitusta ei olisi, olisi ratkaisu triviaalisti x(s) = y(s). Hamiltonin funktio on. p(0) = p(s) = 0.
 = y(s). Hamiltonin funktio on. p(0) = p(s) = 0.") Mat-.148 Dynaaminen optimointi Mitri Kitti/Ilkka Leppänen Mallivastaukset, kierros 1 1. Olkoon maaston korkeus y(s) derivoituva funktio ja etsitään tien profiilia x(s). Päätösmuuttuja on tien jyrkkyys
Mat-.148 Dynaaminen optimointi Mitri Kitti/Ilkka Leppänen Mallivastaukset, kierros 1 1. Olkoon maaston korkeus y(s) derivoituva funktio ja etsitään tien profiilia x(s). Päätösmuuttuja on tien jyrkkyys
y (0) = 0 y h (x) = C 1 e 2x +C 2 e x e10x e 3 e8x dx + e x 1 3 e9x dx = e 2x 1 3 e8x 1 8 = 1 24 e10x 1 27 e10x = e 10x e10x
 = 0 y h (x) = C 1 e 2x +C 2 e x e10x e 3 e8x dx + e x 1 3 e9x dx = e 2x 1 3 e8x 1 8 = 1 24 e10x 1 27 e10x = e 10x e10x") BM0A5830 Differentiaaliyhtälöiden peruskurssi Harjoitus 4, Kevät 017 Päivityksiä: 1. Ratkaise differentiaaliyhtälöt 3y + 4y = 0 ja 3y + 4y = e x.. Ratkaise DY (a) 3y 9y + 6y = e 10x (b) Mikä on edellisen
BM0A5830 Differentiaaliyhtälöiden peruskurssi Harjoitus 4, Kevät 017 Päivityksiä: 1. Ratkaise differentiaaliyhtälöt 3y + 4y = 0 ja 3y + 4y = e x.. Ratkaise DY (a) 3y 9y + 6y = e 10x (b) Mikä on edellisen
6. Differentiaaliyhtälösysteemien laadullista teoriaa.
 1 MAT-13450 LAAJA MATEMATIIKKA 5 Tampereen teknillinen yliopisto Risto Silvennoinen Kevät 2010 6. Differentiaaliyhtälösysteemien laadullista teoriaa. Olemme keskittyneet tässä kurssissa ensimmäisen kertaluvun
1 MAT-13450 LAAJA MATEMATIIKKA 5 Tampereen teknillinen yliopisto Risto Silvennoinen Kevät 2010 6. Differentiaaliyhtälösysteemien laadullista teoriaa. Olemme keskittyneet tässä kurssissa ensimmäisen kertaluvun
Integrointialgoritmit molekyylidynamiikassa
 Integrointialgoritmit molekyylidynamiikassa Markus Ovaska 28.11.2008 Esitelmän kulku MD-simulaatiot yleisesti Integrointialgoritmit: mitä integroidaan ja miten? Esimerkkejä eri algoritmeista Hyvän algoritmin
Integrointialgoritmit molekyylidynamiikassa Markus Ovaska 28.11.2008 Esitelmän kulku MD-simulaatiot yleisesti Integrointialgoritmit: mitä integroidaan ja miten? Esimerkkejä eri algoritmeista Hyvän algoritmin
TASON YHTÄLÖT. Tason esitystapoja ovat: vektoriyhtälö, parametriesitys (2 parametria), normaalimuotoinen yhtälö ja koordinaattiyhtälö.
, normaalimuotoinen yhtälö ja koordinaattiyhtälö.") TSON YHTÄLÖT VEKTORIT, M4 Jokainen seuraavista määrää avaruuden tason yksikäsitteisesti: - kolme tason pistettä, jotka eivät ole samalla suoralla, - yksi piste ja pisteen ulkopuolinen suora, - yksi piste
TSON YHTÄLÖT VEKTORIT, M4 Jokainen seuraavista määrää avaruuden tason yksikäsitteisesti: - kolme tason pistettä, jotka eivät ole samalla suoralla, - yksi piste ja pisteen ulkopuolinen suora, - yksi piste
z muunnos ja sen soveltaminen LTI järjestelmien analysointiin
 z muunnos ja sen soveltaminen LTI järjestelmien analysointiin muunnoksella (eng. transform) on vastaava asema diskreettiaikaisten signaalien ja LTI järjestelmien analyysissä kuin Laplace muunnoksella jatkuvaaikaisten
z muunnos ja sen soveltaminen LTI järjestelmien analysointiin muunnoksella (eng. transform) on vastaava asema diskreettiaikaisten signaalien ja LTI järjestelmien analyysissä kuin Laplace muunnoksella jatkuvaaikaisten
3.4 Rationaalifunktion kulku ja asymptootit
 .4 Rationaalifunktion kulku ja asymptootit Rationaali- eli murtofunktiolla tarkoitetaan funktiota R, jonka lauseke on kahden polynomin osamäärä: P() R(). Q() Ainakin nimittäjässä olevan polynomin asteluvun
.4 Rationaalifunktion kulku ja asymptootit Rationaali- eli murtofunktiolla tarkoitetaan funktiota R, jonka lauseke on kahden polynomin osamäärä: P() R(). Q() Ainakin nimittäjässä olevan polynomin asteluvun
Dynaamisten systeemien teoriaa. Systeemianalyysilaboratorio II
 Dynaamisten systeemien teoriaa Systeemianalyysilaboratorio II 15.11.2017 Vakiot, sisäänmenot, ulostulot ja häiriöt Mallin vakiot Systeemiparametrit annettuja vakioita, joita ei muuteta; esim. painovoiman
Dynaamisten systeemien teoriaa Systeemianalyysilaboratorio II 15.11.2017 Vakiot, sisäänmenot, ulostulot ja häiriöt Mallin vakiot Systeemiparametrit annettuja vakioita, joita ei muuteta; esim. painovoiman
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 8 1 Funktion kuperuussuunnat Derivoituva funktio f (x) on pisteessä x aidosti konveksi, jos sen toinen derivaatta on positiivinen f (x) > 0. Vastaavasti f (x) on aidosti
Matematiikan tukikurssi Kurssikerta 8 1 Funktion kuperuussuunnat Derivoituva funktio f (x) on pisteessä x aidosti konveksi, jos sen toinen derivaatta on positiivinen f (x) > 0. Vastaavasti f (x) on aidosti
MS-A0004/A0006 Matriisilaskenta
 4. MS-A4/A6 Matriisilaskenta 4. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto..25 Tarkastellaan neliömatriiseja. Kun matriisilla kerrotaan vektoria, vektorin
4. MS-A4/A6 Matriisilaskenta 4. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto..25 Tarkastellaan neliömatriiseja. Kun matriisilla kerrotaan vektoria, vektorin
2 Raja-arvo ja jatkuvuus
 Juuri 6 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 5.7.6 Raja-arvo ja jatkuvuus. a) Kun suorakulmion kärki on kohdassa =, on suorakulmion kannan pituus. Suorakulmion korkeus on käyrän y-koordinaatti
Juuri 6 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 5.7.6 Raja-arvo ja jatkuvuus. a) Kun suorakulmion kärki on kohdassa =, on suorakulmion kannan pituus. Suorakulmion korkeus on käyrän y-koordinaatti
Matemaattinen Analyysi
 Vaasan yliopisto, kevät 01 / ORMS1010 Matemaattinen Analyysi. harjoitus, viikko 1 R1 ke 1 16 D11 (..) R to 10 1 D11 (..) 1. Määritä funktion y(x) MacLaurinin sarjan kertoimet, kun y(0) = ja y (x) = (x
Vaasan yliopisto, kevät 01 / ORMS1010 Matemaattinen Analyysi. harjoitus, viikko 1 R1 ke 1 16 D11 (..) R to 10 1 D11 (..) 1. Määritä funktion y(x) MacLaurinin sarjan kertoimet, kun y(0) = ja y (x) = (x
Ensimmäisen ja toisen kertaluvun differentiaaliyhtälöistä
 1 MAT-1345 LAAJA MATEMATIIKKA 5 Tampereen teknillinen yliopisto Risto Silvennoinen Kevät 9 Ensimmäisen ja toisen kertaluvun differentiaaliyhtälöistä Yksi tavallisimmista luonnontieteissä ja tekniikassa
1 MAT-1345 LAAJA MATEMATIIKKA 5 Tampereen teknillinen yliopisto Risto Silvennoinen Kevät 9 Ensimmäisen ja toisen kertaluvun differentiaaliyhtälöistä Yksi tavallisimmista luonnontieteissä ja tekniikassa
3 Toisen kertaluvun lineaariset differentiaaliyhtälöt
 3 Toisen kertaluvun lineaariset differentiaaliyhtälöt 3.1 Homogeeniset lineaariset differentiaaliyhtälöt Toisen kertaluvun differentiaaliyhtälö on lineaarinen, jos se voidaan kirjoittaa muotoon Jos r(x)
3 Toisen kertaluvun lineaariset differentiaaliyhtälöt 3.1 Homogeeniset lineaariset differentiaaliyhtälöt Toisen kertaluvun differentiaaliyhtälö on lineaarinen, jos se voidaan kirjoittaa muotoon Jos r(x)
. Kun p = 1, jono suppenee raja-arvoon 1. Jos p = 2, jono hajaantuu. Jono suppenee siis lineaarisesti. Vastaavasti jonolle r k+1 = r k, suhde on r k+1
 TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-.39 Optimointioppi Kimmo Berg 8. harjoitus - ratkaisut. a)huomataan ensinnäkin että kummankin jonon raja-arvo r on nolla. Oletetaan lisäksi että
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-.39 Optimointioppi Kimmo Berg 8. harjoitus - ratkaisut. a)huomataan ensinnäkin että kummankin jonon raja-arvo r on nolla. Oletetaan lisäksi että
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt
 MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Differentiaaliyhtälöt, osa 1 Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 20 R. Kangaslampi Matriisihajotelmista
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Differentiaaliyhtälöt, osa 1 Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 20 R. Kangaslampi Matriisihajotelmista
Vastaus: 10. Kertausharjoituksia. 1. Lukujonot lim = lim n + = = n n. Vastaus: suppenee raja-arvona Vastaus:
 . Koska F( ) on jokin funktion f ( ) integraalifunktio, niin a+ a f() t dt F( a+ t) F( a) ( a+ ) b( a b) Vastaus: Kertausharjoituksia. Lukujonot 87. + n + lim lim n n n n Vastaus: suppenee raja-arvona
. Koska F( ) on jokin funktion f ( ) integraalifunktio, niin a+ a f() t dt F( a+ t) F( a) ( a+ ) b( a b) Vastaus: Kertausharjoituksia. Lukujonot 87. + n + lim lim n n n n Vastaus: suppenee raja-arvona
Mat Dynaaminen optimointi, mallivastaukset, kierros Vaimennetun heilurin tilanyhtälöt on esitetty luennolla: θ = g sin θ r θ
 Mat-48 Dynaaminen optimointi, mallivastaukset, kierros Vaimennetun heilurin tilanyhtälöt on esitetty luennolla: θ = g sin θ r θ L ẋ = x ẋ = g L sin x rx Epälineaarisen systeemin tasapainotiloja voidaan
Mat-48 Dynaaminen optimointi, mallivastaukset, kierros Vaimennetun heilurin tilanyhtälöt on esitetty luennolla: θ = g sin θ r θ L ẋ = x ẋ = g L sin x rx Epälineaarisen systeemin tasapainotiloja voidaan
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 4 Jatkuvuus Jatkuvan funktion määritelmä Tarkastellaan funktiota f x) jossakin tietyssä pisteessä x 0. Tämä funktio on tässä pisteessä joko jatkuva tai epäjatkuva. Jatkuvuuden
Matematiikan tukikurssi Kurssikerta 4 Jatkuvuus Jatkuvan funktion määritelmä Tarkastellaan funktiota f x) jossakin tietyssä pisteessä x 0. Tämä funktio on tässä pisteessä joko jatkuva tai epäjatkuva. Jatkuvuuden
Lineaarialgebra ja differentiaaliyhtälöt Laskuharjoitus 1 / vko 44
 Lineaarialgebra ja differentiaaliyhtälöt Laskuharjoitus 1 / vko 44 Tehtävät 1-3 lasketaan alkuviikon harjoituksissa, verkkotehtävien dl on lauantaina aamuyöllä. Tehtävät 4 ja 5 lasketaan loppuviikon harjoituksissa.
Lineaarialgebra ja differentiaaliyhtälöt Laskuharjoitus 1 / vko 44 Tehtävät 1-3 lasketaan alkuviikon harjoituksissa, verkkotehtävien dl on lauantaina aamuyöllä. Tehtävät 4 ja 5 lasketaan loppuviikon harjoituksissa.
Yhtälöryhmät 1/6 Sisältö ESITIEDOT: yhtälöt
 Yhtälöryhmät 1/6 Sisältö Yhtälöryhmä Yhtälöryhmässä on useita yhtälöitä ja yleensä myös useita tuntemattomia. Tavoitteena on löytää tuntemattomille sellaiset arvot, että kaikki yhtälöt toteutuvat samanaikaisesti.
Yhtälöryhmät 1/6 Sisältö Yhtälöryhmä Yhtälöryhmässä on useita yhtälöitä ja yleensä myös useita tuntemattomia. Tavoitteena on löytää tuntemattomille sellaiset arvot, että kaikki yhtälöt toteutuvat samanaikaisesti.
1.4 Funktion jatkuvuus
 1.4 Funktion jatkuvuus Kun arkikielessä puhutaan jonkin asian jatkuvuudesta, mielletään asiassa olevan jonkinlaista yhtäjaksoisuutta, katkeamattomuutta. Tässä ei kuitenkaan käsitellä työasioita eikä ihmissuhteita,
1.4 Funktion jatkuvuus Kun arkikielessä puhutaan jonkin asian jatkuvuudesta, mielletään asiassa olevan jonkinlaista yhtäjaksoisuutta, katkeamattomuutta. Tässä ei kuitenkaan käsitellä työasioita eikä ihmissuhteita,
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 4 Supremum ja inmum Tarkastellaan aluksi avointa väliä, Tämä on joukko, johon kuuluvat kaikki reaaliluvut miinus yhdestä yhteen Kuitenkaan päätepisteet eli luvut ja
Matematiikan tukikurssi Kurssikerta 4 Supremum ja inmum Tarkastellaan aluksi avointa väliä, Tämä on joukko, johon kuuluvat kaikki reaaliluvut miinus yhdestä yhteen Kuitenkaan päätepisteet eli luvut ja
12. Hessen matriisi. Ääriarvoteoriaa
 179 12. Hessen matriisi. Ääriarvoteoriaa Tarkastelemme tässä luvussa useamman muuttujan (eli vektorimuuttujan) n reaaliarvoisia unktioita : R R. Edellisessä luvussa todettiin, että riittävän säännöllisellä
179 12. Hessen matriisi. Ääriarvoteoriaa Tarkastelemme tässä luvussa useamman muuttujan (eli vektorimuuttujan) n reaaliarvoisia unktioita : R R. Edellisessä luvussa todettiin, että riittävän säännöllisellä
Osa IX. Z muunnos. Johdanto Diskreetit funktiot
 Osa IX Z muunnos A.Rasila, J.v.Pfaler () Mat-.33 Matematiikan peruskurssi KP3-i 9. lokakuuta 2007 298 / 322 A.Rasila, J.v.Pfaler () Mat-.33 Matematiikan peruskurssi KP3-i 9. lokakuuta 2007 299 / 322 Johdanto
Osa IX Z muunnos A.Rasila, J.v.Pfaler () Mat-.33 Matematiikan peruskurssi KP3-i 9. lokakuuta 2007 298 / 322 A.Rasila, J.v.Pfaler () Mat-.33 Matematiikan peruskurssi KP3-i 9. lokakuuta 2007 299 / 322 Johdanto
MS-C1340 Lineaarialgebra ja
 MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Matriisinormi, häiriöalttius Riikka Kangaslampi Kevät 2017 Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Matriisinormi Matriisinormi Matriiseille
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Matriisinormi, häiriöalttius Riikka Kangaslampi Kevät 2017 Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Matriisinormi Matriisinormi Matriiseille
BM20A5840 Usean muuttujan funktiot ja sarjat Harjoitus 1, Kevät 2018
 BM20A5840 Usean muuttujan funktiot ja sarjat Harjoitus 1, Kevät 2018 1. (a) Tunnemme vektorit a = [ 5 1 1 ] ja b = [ 2 0 1 ]. Laske (i) kummankin vektorin pituus (eli itseisarvo, eli normi); (ii) vektorien
BM20A5840 Usean muuttujan funktiot ja sarjat Harjoitus 1, Kevät 2018 1. (a) Tunnemme vektorit a = [ 5 1 1 ] ja b = [ 2 0 1 ]. Laske (i) kummankin vektorin pituus (eli itseisarvo, eli normi); (ii) vektorien
1 Matriisit ja lineaariset yhtälöryhmät
 1 Matriisit ja lineaariset yhtälöryhmät 11 Yhtälöryhmä matriisimuodossa m n-matriisi sisältää mn kpl reaali- tai kompleksilukuja, jotka on asetetettu suorakaiteen muotoiseksi kaavioksi: a 11 a 12 a 1n
1 Matriisit ja lineaariset yhtälöryhmät 11 Yhtälöryhmä matriisimuodossa m n-matriisi sisältää mn kpl reaali- tai kompleksilukuja, jotka on asetetettu suorakaiteen muotoiseksi kaavioksi: a 11 a 12 a 1n
1 Peruskäsitteet. Dierentiaaliyhtälöt
 Teknillinen korkeakoulu Matematiikka Dierentiaaliyhtälöt Alestalo Tässä monisteessa käydään läpi tavallisiin dierentiaaliyhtälöihin liittyviä peruskäsitteitä ja ratkaisuperiaatteita. Esimerkkejä luennoilla
Teknillinen korkeakoulu Matematiikka Dierentiaaliyhtälöt Alestalo Tässä monisteessa käydään läpi tavallisiin dierentiaaliyhtälöihin liittyviä peruskäsitteitä ja ratkaisuperiaatteita. Esimerkkejä luennoilla
MS-A0003/A0005 Matriisilaskenta Laskuharjoitus 2 / vko 45
 MS-A0003/A0005 Matriisilaskenta Laskuharjoitus / vko 5 Tehtävä 1 (L): Hahmottele kompleksitasoon ne pisteet, jotka toteuttavat a) z 3 =, b) z + 3 i < 3, c) 1/z >. Yleisesti: ehto z = R, z C muodostaa kompleksitasoon
MS-A0003/A0005 Matriisilaskenta Laskuharjoitus / vko 5 Tehtävä 1 (L): Hahmottele kompleksitasoon ne pisteet, jotka toteuttavat a) z 3 =, b) z + 3 i < 3, c) 1/z >. Yleisesti: ehto z = R, z C muodostaa kompleksitasoon
5 Lineaariset yhtälöryhmät
 5 Lineaariset yhtälöryhmät Edellisen luvun lopun esimerkissä päädyttiin yhtälöryhmään, jonka ratkaisemisesta riippui, kuuluuko tietty vektori eräiden toisten vektorien virittämään aliavaruuteen Tämäntyyppisiä
5 Lineaariset yhtälöryhmät Edellisen luvun lopun esimerkissä päädyttiin yhtälöryhmään, jonka ratkaisemisesta riippui, kuuluuko tietty vektori eräiden toisten vektorien virittämään aliavaruuteen Tämäntyyppisiä
Numeeriset menetelmät TIEA381. Luento 12. Kirsi Valjus. Jyväskylän yliopisto. Luento 12 () Numeeriset menetelmät / 33
 Numeeriset menetelmät / 33") Numeeriset menetelmät TIEA381 Luento 12 Kirsi Valjus Jyväskylän yliopisto Luento 12 () Numeeriset menetelmät 25.4.2013 1 / 33 Luennon 2 sisältö Tavallisten differentiaaliyhtälöiden numeriikasta Rungen
Numeeriset menetelmät TIEA381 Luento 12 Kirsi Valjus Jyväskylän yliopisto Luento 12 () Numeeriset menetelmät 25.4.2013 1 / 33 Luennon 2 sisältö Tavallisten differentiaaliyhtälöiden numeriikasta Rungen
Esimerkki: Tarkastellaan korkeudella h ht () putoavaa kappaletta, jonka massa on m (ks. kuva).
 putoavaa kappaletta, jonka massa on m (ks. kuva).") 6 DIFFERENTIAALIYHTÄLÖISTÄ Esimerkki: Tarkastellaan korkeudella h ht () putoavaa kappaletta, jonka massa on m (ks. kuva). Newtonin II:n lain (ma missä Yhtälö dh dt m dh dt F) mukaan mg, on kiihtyvyys ja
6 DIFFERENTIAALIYHTÄLÖISTÄ Esimerkki: Tarkastellaan korkeudella h ht () putoavaa kappaletta, jonka massa on m (ks. kuva). Newtonin II:n lain (ma missä Yhtälö dh dt m dh dt F) mukaan mg, on kiihtyvyys ja
Talousmatematiikan perusteet: Luento 14. Rajoittamaton optimointi Hessen matriisi Ominaisarvot Ääriarvon laadun tarkastelu
 Talousmatematiikan perusteet: Luento 14 Rajoittamaton optimointi Hessen matriisi Ominaisarvot Ääriarvon laadun tarkastelu Luennolla 6 Tarkastelimme yhden muuttujan funktion f(x) rajoittamatonta optimointia
Talousmatematiikan perusteet: Luento 14 Rajoittamaton optimointi Hessen matriisi Ominaisarvot Ääriarvon laadun tarkastelu Luennolla 6 Tarkastelimme yhden muuttujan funktion f(x) rajoittamatonta optimointia
Yhtälöryhmä matriisimuodossa. MS-A0004/A0006 Matriisilaskenta. Tarkastellaan esimerkkinä lineaarista yhtälöparia. 2x1 x 2 = 1 x 1 + x 2 = 5.
 2. MS-A4/A6 Matriisilaskenta 2. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 5.9.25 Tarkastellaan esimerkkinä lineaarista yhtälöparia { 2x x 2 = x + x 2
2. MS-A4/A6 Matriisilaskenta 2. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 5.9.25 Tarkastellaan esimerkkinä lineaarista yhtälöparia { 2x x 2 = x + x 2
Juuri 12 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty
 Juuri Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 7.5.08 Kertaus K. a) Polynomi P() = + 8 on jaollinen polynomilla Q() =, jos = on polynomin P nollakohta, eli P() = 0. P() = + 8 = 54 08 +
Juuri Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 7.5.08 Kertaus K. a) Polynomi P() = + 8 on jaollinen polynomilla Q() =, jos = on polynomin P nollakohta, eli P() = 0. P() = + 8 = 54 08 +
Rationaalilauseke ja -funktio
 4.8.07 Rationaalilauseke ja -funktio Määritelmä, rationaalilauseke ja funktio: Kahden polynomin ja osamäärä, 0 on rationaalilauseke, jonka osoittaja on ja nimittäjä. Huomaa, että pelkkä polynomi on myös
4.8.07 Rationaalilauseke ja -funktio Määritelmä, rationaalilauseke ja funktio: Kahden polynomin ja osamäärä, 0 on rationaalilauseke, jonka osoittaja on ja nimittäjä. Huomaa, että pelkkä polynomi on myös
Useita oskillaattoreita yleinen tarkastelu
 Useita oskillaattoreita yleinen tarkastelu Useita riippumattomia vapausasteita q i, i =,..., n ja potentiaali vastaavasti U(q, q 2,..., q n). Tasapainoasema {q 0, q0 2,..., q0 n} q 0 Käytetään merkintää
Useita oskillaattoreita yleinen tarkastelu Useita riippumattomia vapausasteita q i, i =,..., n ja potentiaali vastaavasti U(q, q 2,..., q n). Tasapainoasema {q 0, q0 2,..., q0 n} q 0 Käytetään merkintää
Insinöörimatematiikka D
 Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
w + x + y + z =4, wx + wy + wz + xy + xz + yz =2, wxy + wxz + wyz + xyz = 4, wxyz = 1.
 Kotitehtävät, tammikuu 2011 Vaikeampi sarja 1. Ratkaise yhtälöryhmä w + x + y + z =4, wx + wy + wz + xy + xz + yz =2, wxy + wxz + wyz + xyz = 4, wxyz = 1. Ratkaisu. Yhtälöryhmän ratkaisut (w, x, y, z)
Kotitehtävät, tammikuu 2011 Vaikeampi sarja 1. Ratkaise yhtälöryhmä w + x + y + z =4, wx + wy + wz + xy + xz + yz =2, wxy + wxz + wyz + xyz = 4, wxyz = 1. Ratkaisu. Yhtälöryhmän ratkaisut (w, x, y, z)
5 Ominaisarvot ja ominaisvektorit
 5 Ominaisarvot ja ominaisvektorit Olkoon A = [a jk ] n n matriisi. Tarkastellaan vektoriyhtälöä Ax = λx, (1) missä λ on luku. Sellaista λ:n arvoa, jolla yhtälöllä on ratkaisu x 0, kutsutaan matriisin A
5 Ominaisarvot ja ominaisvektorit Olkoon A = [a jk ] n n matriisi. Tarkastellaan vektoriyhtälöä Ax = λx, (1) missä λ on luku. Sellaista λ:n arvoa, jolla yhtälöllä on ratkaisu x 0, kutsutaan matriisin A
Käänteismatriisi 1 / 14
 1 / 14 Jokaisella nollasta eroavalla reaaliluvulla on käänteisluku, jolla kerrottaessa tuloksena on 1. Seuraavaksi tarkastellaan vastaavaa ominaisuutta matriiseille ja määritellään käänteismatriisi. Jokaisella
1 / 14 Jokaisella nollasta eroavalla reaaliluvulla on käänteisluku, jolla kerrottaessa tuloksena on 1. Seuraavaksi tarkastellaan vastaavaa ominaisuutta matriiseille ja määritellään käänteismatriisi. Jokaisella
MS-A0104 Differentiaali- ja integraalilaskenta 1 (ELEC2) MS-A0106 Differentiaali- ja integraalilaskenta 1 (ENG2)
 MS-A0106 Differentiaali- ja integraalilaskenta 1 (ENG2)") MS-A4 Differentiaali- ja integraalilaskenta (ELEC2) MS-A6 Differentiaali- ja integraalilaskenta (ENG2) Harjoitukset 3L, syksy 27 Tehtävä. a) Määritä luvun π likiarvo käyttämällä Newtonin menetelmää yhtälölle
MS-A4 Differentiaali- ja integraalilaskenta (ELEC2) MS-A6 Differentiaali- ja integraalilaskenta (ENG2) Harjoitukset 3L, syksy 27 Tehtävä. a) Määritä luvun π likiarvo käyttämällä Newtonin menetelmää yhtälölle
y + 4y = 0 (1) λ = 0
 λ = 0") Matematiikan ja tilastotieteen osasto/hy Differentiaaliyhtälöt I Laskuharjoitus 6 mallit Kevät 2019 Tehtävä 1. Ratkaise yhtälöt a) y + 4y = x 2, b) y + 4y = 3e x. Ratkaisu: a) Differentiaaliyhtälön yleinen
Matematiikan ja tilastotieteen osasto/hy Differentiaaliyhtälöt I Laskuharjoitus 6 mallit Kevät 2019 Tehtävä 1. Ratkaise yhtälöt a) y + 4y = x 2, b) y + 4y = 3e x. Ratkaisu: a) Differentiaaliyhtälön yleinen
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 6 1 Korkolaskentaa Oletetaan, että korkoaste on r Jos esimerkiksi r = 0, 02, niin korko on 2 prosenttia Tätä korkoastetta käytettään diskonttaamaan tulevia tuloja ja
Matematiikan tukikurssi Kurssikerta 6 1 Korkolaskentaa Oletetaan, että korkoaste on r Jos esimerkiksi r = 0, 02, niin korko on 2 prosenttia Tätä korkoastetta käytettään diskonttaamaan tulevia tuloja ja
Tekijä MAA2 Polynomifunktiot ja -yhtälöt = Vastaus a)
") K1 a) Tekijä MAA Polynomifunktiot ja -yhtälöt 6.8.016 ( + + ) + ( ) = + + + = + + + = + 4 b) 4 4 ( 5 + ) ( 5 + 1) = 5 + + 5 + 1 4 = + + + 4 = + 5 5 1 1 Vastaus a) 4 + b) 4 + 1 K a) f ( ) = + 1 f () = +
K1 a) Tekijä MAA Polynomifunktiot ja -yhtälöt 6.8.016 ( + + ) + ( ) = + + + = + + + = + 4 b) 4 4 ( 5 + ) ( 5 + 1) = 5 + + 5 + 1 4 = + + + 4 = + 5 5 1 1 Vastaus a) 4 + b) 4 + 1 K a) f ( ) = + 1 f () = +
Ellipsoidimenetelmä. Samuli Leppänen Kokonaislukuoptimointi. S ysteemianalyysin Laboratorio
 Ellipsoidimenetelmä Kokonaislukuoptimointi Sovelletun matematiikan lisensiaattiseminaari Kevät 2008 / 1 Sisällys Ellipsoidimenetelmän geometrinen perusta ja menetelmän idea Formaali ellipsoidimenetelmä
Ellipsoidimenetelmä Kokonaislukuoptimointi Sovelletun matematiikan lisensiaattiseminaari Kevät 2008 / 1 Sisällys Ellipsoidimenetelmän geometrinen perusta ja menetelmän idea Formaali ellipsoidimenetelmä
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 3 Supremum ja infimum Tarkastellaan aluksi avointa väliä, ) = { : < < }. Tämä on joukko, johon kuuluvat kaikki reaaliluvut miinus yhdestä yhteen. Kuitenkaan päätepisteet
Matematiikan tukikurssi Kurssikerta 3 Supremum ja infimum Tarkastellaan aluksi avointa väliä, ) = { : < < }. Tämä on joukko, johon kuuluvat kaikki reaaliluvut miinus yhdestä yhteen. Kuitenkaan päätepisteet
Matematiikan tukikurssi, kurssikerta 4
 Matematiikan tukikurssi, kurssikerta 4 1 Raja-arvo äärettömyydessä Tietyllä funktiolla f() voi olla raja-arvo äärettömyydessä, jota merkitään f(). Tämä tarkoittaa, että funktio f() lähestyy jotain tiettyä
Matematiikan tukikurssi, kurssikerta 4 1 Raja-arvo äärettömyydessä Tietyllä funktiolla f() voi olla raja-arvo äärettömyydessä, jota merkitään f(). Tämä tarkoittaa, että funktio f() lähestyy jotain tiettyä
2.2.1 Ratkaiseminen arvausta sovittamalla
 2.2.1 Ratkaiseminen arvausta sovittamalla Esimerkki: lomitusjärjestäminen (edellä) Yleistys: Ratkaistava T (1) c T (n) g(t (1),..., T (n 1), n) missä g on n ensimmäisen parametrin suhteen kasvava. (Ratkaisu
2.2.1 Ratkaiseminen arvausta sovittamalla Esimerkki: lomitusjärjestäminen (edellä) Yleistys: Ratkaistava T (1) c T (n) g(t (1),..., T (n 1), n) missä g on n ensimmäisen parametrin suhteen kasvava. (Ratkaisu
1 + b t (i, j). Olkoon b t (i, j) todennäköisyys, että B t (i, j) = 1. Siis operaation access(j) odotusarvoinen kustannus ajanhetkellä t olisi.
. Olkoon b t (i, j) todennäköisyys, että B t (i, j) = 1. Siis operaation access(j) odotusarvoinen kustannus ajanhetkellä t olisi.") Algoritmien DP ja MF vertaileminen tapahtuu suoraviivaisesti kirjoittamalla kummankin leskimääräinen kustannus eksplisiittisesti todennäköisyyksien avulla. Lause T MF ave = 1 + 2 1 i
Algoritmien DP ja MF vertaileminen tapahtuu suoraviivaisesti kirjoittamalla kummankin leskimääräinen kustannus eksplisiittisesti todennäköisyyksien avulla. Lause T MF ave = 1 + 2 1 i
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 10 1 Lokaalit ääriarvot Yhden muuttujan funktion f (x) lokaali maksimi on piste x 0, jossa f (x) on suurempi kuin muualle pisteen x 0 ympäristössä, eli kun f (x 0 )
Matematiikan tukikurssi Kurssikerta 10 1 Lokaalit ääriarvot Yhden muuttujan funktion f (x) lokaali maksimi on piste x 0, jossa f (x) on suurempi kuin muualle pisteen x 0 ympäristössä, eli kun f (x 0 )
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat.
 Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat.") MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016 Antti Rasila
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016 Antti Rasila
3. kierros. 2. Lähipäivä
 3. kierros. Lähipäivä Viikon aihe (viikko /) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
3. kierros. Lähipäivä Viikon aihe (viikko /) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt
 MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Matriisihajotelmat: Schur ja Jordan Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 18 R. Kangaslampi Matriisihajotelmat:
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Matriisihajotelmat: Schur ja Jordan Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 18 R. Kangaslampi Matriisihajotelmat:
Matematiikka B3 - Avoin yliopisto
 2. heinäkuuta 2009 Opetusjärjestelyt Luennot 9:15-11:30 Harjoitukset 12:30-15:00 Tentti Lisäharjoitustehtävä Kurssin sisältö (1/2) 1. asteen Differentiaali yhtälöt (1.DY) Separoituva Ratkaisukaava Bernoyulli
2. heinäkuuta 2009 Opetusjärjestelyt Luennot 9:15-11:30 Harjoitukset 12:30-15:00 Tentti Lisäharjoitustehtävä Kurssin sisältö (1/2) 1. asteen Differentiaali yhtälöt (1.DY) Separoituva Ratkaisukaava Bernoyulli
Luento 5: Suurten lineaaristen yhtälöryhmien ratkaiseminen iteratiivisilla menetelmillä
 Luento 5: Suurten lineaaristen yhtälöryhmien ratkaiseminen iteratiivisilla menetelmillä Matriisit voivat olla kooltaan niin suuria, että LU-hajotelman laskeminen ei ole järkevä tapa ratkaista lineaarista
Luento 5: Suurten lineaaristen yhtälöryhmien ratkaiseminen iteratiivisilla menetelmillä Matriisit voivat olla kooltaan niin suuria, että LU-hajotelman laskeminen ei ole järkevä tapa ratkaista lineaarista
Matematiikan peruskurssi 2
 Matematiikan peruskurssi Tentti, 9..06 Tentin kesto: h. Sallitut apuvälineet: kaavakokoelma ja laskin, joka ei kykene graaseen/symboliseen laskentaan Vastaa seuraavista viidestä tehtävästä neljään. Saat
Matematiikan peruskurssi Tentti, 9..06 Tentin kesto: h. Sallitut apuvälineet: kaavakokoelma ja laskin, joka ei kykene graaseen/symboliseen laskentaan Vastaa seuraavista viidestä tehtävästä neljään. Saat
Matemaattinen Analyysi
 Vaasan yliopisto, 009-010 / ORMS1010 Matemaattinen Analyysi 8. harjoitus 1. Ratkaise y + y + y = x. Kommentti: Yleinen työlista ratkaistaessa lineaarista, vakiokertoimista toisen kertaluvun differentiaaliyhtälöä
Vaasan yliopisto, 009-010 / ORMS1010 Matemaattinen Analyysi 8. harjoitus 1. Ratkaise y + y + y = x. Kommentti: Yleinen työlista ratkaistaessa lineaarista, vakiokertoimista toisen kertaluvun differentiaaliyhtälöä
3 Lineaariset yhtälöryhmät ja Gaussin eliminointimenetelmä
 3 Lineaariset yhtälöryhmät ja Gaussin eliminointimenetelmä Lineaarinen m:n yhtälön yhtälöryhmä, jossa on n tuntematonta x 1,, x n on joukko yhtälöitä, jotka ovat muotoa a 11 x 1 + + a 1n x n = b 1 a 21
3 Lineaariset yhtälöryhmät ja Gaussin eliminointimenetelmä Lineaarinen m:n yhtälön yhtälöryhmä, jossa on n tuntematonta x 1,, x n on joukko yhtälöitä, jotka ovat muotoa a 11 x 1 + + a 1n x n = b 1 a 21
Ratkaisuehdotus 2. kurssikoe
 Ratkaisuehdotus 2. kurssikoe 4.2.202 Huomioitavaa: - Tässä ratkaisuehdotuksessa olen pyrkinyt mainitsemaan lauseen, johon kulloinenkin päätelmä vetoaa. Näin opiskelijan on helpompi jäljittää teoreettinen
Ratkaisuehdotus 2. kurssikoe 4.2.202 Huomioitavaa: - Tässä ratkaisuehdotuksessa olen pyrkinyt mainitsemaan lauseen, johon kulloinenkin päätelmä vetoaa. Näin opiskelijan on helpompi jäljittää teoreettinen
Analyysi III. Jari Taskinen. 28. syyskuuta Luku 1
 Analyysi III Jari Taskinen 28. syyskuuta 2002 Luku Sisältö Sarjat 2. Lukujonoista........................... 2.2 Rekursiivisesti määritellyt lukujonot.............. 8.3 Sarja ja sen suppenminen....................
Analyysi III Jari Taskinen 28. syyskuuta 2002 Luku Sisältö Sarjat 2. Lukujonoista........................... 2.2 Rekursiivisesti määritellyt lukujonot.............. 8.3 Sarja ja sen suppenminen....................
Matematiikka B2 - TUDI
 Matematiikka B2 - TUDI Miika Tolonen 3. syyskuuta 2012 Miika Tolonen Matematiikka B2 - TUDI 1 Kurssin sisältö (1/2) Matriisit Laskutoimitukset Lineaariset yhtälöryhmät Gaussin eliminointi Lineaarinen riippumattomuus
Matematiikka B2 - TUDI Miika Tolonen 3. syyskuuta 2012 Miika Tolonen Matematiikka B2 - TUDI 1 Kurssin sisältö (1/2) Matriisit Laskutoimitukset Lineaariset yhtälöryhmät Gaussin eliminointi Lineaarinen riippumattomuus
4.0.2 Kuinka hyvä ennuste on?
 Luonteva ennuste on käyttää yhtälöä (4.0.1), jolloin estimaattori on muotoa X t = c + φ 1 X t 1 + + φ p X t p ja estimointivirheen varianssi on σ 2. X t }{{} todellinen arvo Xt }{{} esimaattori = ε t Esimerkki
Luonteva ennuste on käyttää yhtälöä (4.0.1), jolloin estimaattori on muotoa X t = c + φ 1 X t 1 + + φ p X t p ja estimointivirheen varianssi on σ 2. X t }{{} todellinen arvo Xt }{{} esimaattori = ε t Esimerkki
Differentiaaliyhtälöt II, kevät 2017 Harjoitus 5
 Differentiaaliyhtälöt II, kevät 27 Harjoitus 5 Heikki Korpela 26. huhtikuuta 27 Tehtävä 2. Määrää seuraavan autonomisen systeemin kriittiset pisteet, ratakäyrät ja luonnostele systeemin aikakehitys: (t)
Differentiaaliyhtälöt II, kevät 27 Harjoitus 5 Heikki Korpela 26. huhtikuuta 27 Tehtävä 2. Määrää seuraavan autonomisen systeemin kriittiset pisteet, ratakäyrät ja luonnostele systeemin aikakehitys: (t)
Muutama huomio momenttimenetelmän käytöstä kehärakenteiden analysoinnissa
 Rakenteiden Mekaniikka Vol. 42, Nro 2, 2009, s. 75 82 Muutama huomio momenttimenetelmän käytöstä kehärakenteiden analysoinnissa Reijo Kouhia Tiivistelmä. Momenttimenetelmä on käyttökelpoinen ratkaisutapa
Rakenteiden Mekaniikka Vol. 42, Nro 2, 2009, s. 75 82 Muutama huomio momenttimenetelmän käytöstä kehärakenteiden analysoinnissa Reijo Kouhia Tiivistelmä. Momenttimenetelmä on käyttökelpoinen ratkaisutapa
Talousmatematiikan perusteet: Luento 15. Rajoitettu optimointi Lagrangen menetelmä Lagrangen kerroin ja varjohinta
 Talousmatematiikan perusteet: Luento 15 Rajoitettu optimointi Lagrangen menetelmä Lagrangen kerroin ja varjohinta Viime luennolla Tarkastelimme usean muuttujan funktioiden rajoittamatonta optimointia:
Talousmatematiikan perusteet: Luento 15 Rajoitettu optimointi Lagrangen menetelmä Lagrangen kerroin ja varjohinta Viime luennolla Tarkastelimme usean muuttujan funktioiden rajoittamatonta optimointia:
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 2 Lisää osamurtoja Tutkitaan jälleen rationaalifunktion P(x)/Q(x) integrointia. Aiemmin käsittelimme tapauksen, jossa nimittäjä voidaan esittää muodossa Q(x) = a(x x
Matematiikan tukikurssi Kurssikerta 2 Lisää osamurtoja Tutkitaan jälleen rationaalifunktion P(x)/Q(x) integrointia. Aiemmin käsittelimme tapauksen, jossa nimittäjä voidaan esittää muodossa Q(x) = a(x x
MS-A010{3,4,5} (ELEC*, ENG*) Differentiaali- ja integraalilaskenta 1 Luento 11: Lineaarinen differentiaaliyhtälö
 Differentiaali- ja integraalilaskenta 1 Luento 11: Lineaarinen differentiaaliyhtälö") MS-A010{3,4,5} (ELEC*, ENG*) Differentiaali- ja integraalilaskenta 1 Luento 11: Lineaarinen differentiaaliyhtälö Pekka Alestalo, Jarmo Malinen Aalto-yliopisto, Matematiikan ja systeemianalyysin laitos
MS-A010{3,4,5} (ELEC*, ENG*) Differentiaali- ja integraalilaskenta 1 Luento 11: Lineaarinen differentiaaliyhtälö Pekka Alestalo, Jarmo Malinen Aalto-yliopisto, Matematiikan ja systeemianalyysin laitos
6. Toisen ja korkeamman kertaluvun lineaariset
 SARJAT JA DIFFERENTIAALIYHTÄLÖT 2003 51 6. Toisen ja korkeamman kertaluvun lineaariset differentiaaliyhtälöt Määritelmä 6.1. Olkoon I R avoin väli. Olkoot p i : I R, i = 0, 1, 2,..., n, ja q : I R jatkuvia
SARJAT JA DIFFERENTIAALIYHTÄLÖT 2003 51 6. Toisen ja korkeamman kertaluvun lineaariset differentiaaliyhtälöt Määritelmä 6.1. Olkoon I R avoin väli. Olkoot p i : I R, i = 0, 1, 2,..., n, ja q : I R jatkuvia
Lineaariset yhtälöryhmät ja matriisit
 Lineaariset yhtälöryhmät ja matriisit Lineaarinen yhtälöryhmä a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + + a 2n x n = b 2. a m1 x 1 + a m2 x 2 + + a mn x n = b m, (1) voidaan esittää
Lineaariset yhtälöryhmät ja matriisit Lineaarinen yhtälöryhmä a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + + a 2n x n = b 2. a m1 x 1 + a m2 x 2 + + a mn x n = b m, (1) voidaan esittää
Numeeriset menetelmät
 Numeeriset menetelmät Luento 5 Ti 20.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 5 Ti 20.9.2011 p. 1/40 p. 1/40 Choleskyn menetelmä Positiivisesti definiiteillä matriiseilla kolmiohajotelma
Numeeriset menetelmät Luento 5 Ti 20.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 5 Ti 20.9.2011 p. 1/40 p. 1/40 Choleskyn menetelmä Positiivisesti definiiteillä matriiseilla kolmiohajotelma