KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
|
|
|
- Teija Heino
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
1 KJR-C1001 Statiikka ja dynamiikka Luento Susanna Hurme
2 Statiikan välikoe Ajankohta ma klo 14:15 17:15 Salijako Aalto-Sali: A-Q (sukunimen alkukirjaimen mukaan) Ilmoittautuminen B-Sali: Materiaali ja välineet Ei pakollinen P-Ö (sukunimen alkukirjaimen mukaan) o Opiskelijalla saa tuoda mukanaan ainoastaan kirjoitusvälineet (kynät, pyyhekumi ja viivain) ja laskimen (kaikki laskintyypit hyväksytään) o Opiskelijalle jaetaan tehtävä- ja vastauspaperit o Tehtäväpapereissa kysymykset ovat suomeksi, ruotsiksi ja englanniksi Sisältö Koealue Yleisiä sääntöjä 3 tehtävää Statiikan luennot ja tehtävät ja kurssikirjan luvut kurssiesitteen mukaan ENGin tenttiohjesääntöä noudatetaan soveltuvin osin




3 Päivän aihe: Statiikan kertausluento Osaamistavoitteet: Ymmärtää statiikan kurssi kokonaisuutena Mitä on statiikka? Sisältö: Mekaniikan mallit: partikkeli ja jäykkä kappale Ulkoiset kuormitustyypit: voima, voiman momentti ja jakaantunut voima Tasapainon käsite ja mitä se tarkoittaa eri tapauksissa Partikkeli Jäykkä kappale Kappalesysteemi eli rakenne Sisäiset voimat Esimerkkitehtäviä (Huomioita voimasysteemien ulkoisista vaikutuksista ja sisäisistä voimista)
4 Mitä on statiikka? Mekaniikka: Tutkii kappaleiden käyttäytymistä voimien vaikutuksen alaisena. Statiikka: Tutkii kappaleita tasapainossa. Dynamiikka: Tutkii kappaleita kiihtyvässä liikkeessä


5 Mekaniikan mallit: partikkeli ja jäykkä kappale Mikä on partikkeli? Partikkelilla on massa, mutta sen geometriaa ei huomioida. Kaikki voimat vaikuttavat yhdessä pisteessä. Mikä on jäykkä kappale? Kappale, jossa ei tapahdu mitään muodonmuutoksia Materiaalin ominaisuuksia ei tarvita
6 Kuormitustyypit Voima Voiman momentti Jakaantunut voima
7 Voima vektorimuodossa r AB Voimavektori F = Fu u = r r Esimerkki: Kuvan ketjua vedetään 300 kn suuruisella voimalla. Pisteiden koordinaatit ovat A = (2,0,2) ja B = (2,5,5). r A = 2i + 2k r A + r AB = r B r B = 2i + 5j + 5k r AB = r B r A r AB = 2 2 i j k r A r B = 5j + 3k r AB = r AB = = 34 (m) F = Fu = 300kN 5j + 3k 34 = j + k kn 34
8 Momentti vektorimuodossa Voiman momentti M O = r F M O = Fd Määritä momentti pisteen O ympäri, kun F = 300i 200j + 150k N. Määritetään voiman paikkavektori r OB : r OB = 0.3i + 0.4j 0.2k m r OB M O = r OB F = i j k = ( 0.2) ( 200) i ( 0.2) 300 j k = 20i 105j 180k
9 Momentti vektorimuodossa Määritä momentti -akselin ympäri, kun F = 300i 200j + 150k N. Momentti -akselin ympäri on momenttivektorin -akselin suuntainen komponentti. M O = 20i 105j 180k r OB = M i + M y j + M z k Momentti -akselin ympäri Vastaus: M = 20 Nm M = 20i Nm
10 Momentti vektorimuodossa Määritä momentti pisteiden O ja A kautta kulkevan akselin ympäri, kun F = 300i 200j + 150k N. Momentti akselin ympäri on momenttivektorin projektio akselille. Eli momenttivektorin ja akselin suuntaisen yksikkövektorin pistetulo: M OA = u OA M O u OA = r OA r OA = 0.3i + 0.4j m = 0.6i + 0.8j (0.3m) 2 +(0.4m) 2 u OA M O = (0.6i + 0.8j) (20i 105j 180k)
11 Momentti vektorimuodossa Pistetulon määritelmä: A B = AB cos θ u OA M O = (0.6i + 0.8j) (20i 105j 180k) = ( 105) = 72 cos 0 = 1 ja cos 90 = 0, joten kantavektoreille: i i = j j = k k = 1 i j = i k = j k = 0 Vastaus: M OA = 72 Nm M OA = M OA u OA = 72 Nm 0.6i + 0.8j = 43.2i 57.6j Nm
12 Momentti vektorimuodossa Määritä momentti pisteiden O ja A kautta kulkevan akselin ympäri, kun F = 300i 200j + 150k N. Momentti akselin ympäri voitaisiin ratkaista suoraan (laskematta ensin momenttia pisteen O ympäri) skalaarikolmitulon avulla: M OA = u OA (r OB F) = u OA M O M OA = u OA (r OB F) = u OA u OA y u OA z r OB r OB y r OB z F F y F z = = ( 200) = 72 M OA = 72 Nm

13 Jakaantunut voima Jakaantunut voima esitetään yleensä resultanttinsa avulla, joka on yhtä suuri kuin kuormituskäyrän ja -akselin väliin jäävän alueen pinta-ala. Jakaantuneen voiman resultantin vaikutussuora kulkee alan painopisteen kautta. F R = 0 L w d = A
14 Jakaantunut voima F R = 6 kn m 2m = 12 kn y 6 kn/m y A B A B = 2m 1 m 1 m 1 m 1 m 1 m 1 m
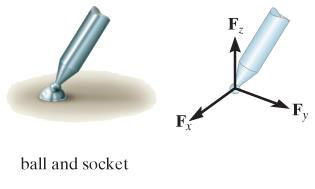
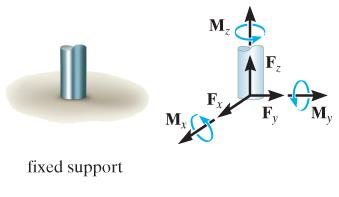
15 Tuennat Tukireaktioita tasossa Kolmiulotteisia tuentoja
16 Tasapaino Partikkeli tai jäykkä kappale on tasapainossa, kun se on paikallaan tai liikkuu vakionopeudella. ΣF = 0 ΣF = 0 ΣM = 0
17 Statiikan tehtävän ratkaiseminen 1. Piirrä vapaakappalekuva 1. Piirrä kappaleen ääriviivat 2. Piirrä kaikki ulkoiset voimat: kuormitukset ja tukireaktiot 3. Merkitse kaikki voimat: tunnetut ja tuntemattomat 2. Ratkaise tuntemattomat voimat tasapainoyhtälöiden avulla Kolme yhtälöä tasossa Kuusi yhtälöä avaruudessa

18 Vapaakappalekuva Näin piirrät vapaakappalekuvan: 1. Piirrä kappaleen ääriviivat 2. Piirrä kaikki partikkeliin vaikuttavat voimat Aktiiviset voimat ja tukivoimat 3. Merkitse kaikki voimat Tunnetut ja tuntemattomat

19 Esimerkki (Luku 3.3) Laatikko painaa 2,75 kn. Mitkä voimat vaikuttavat köysissä BA ja AC? Piirretään vapaakappalekuvat: Laatikko Köysi AD Lenkki A T AD T DA = T AD T AB T AC W = 2,57kN T AD T AD
20 Esimerkki (jatkuu) y Tasapainoehto: T AB T AC ΣF = 0 ΣF i + ΣF y j = 0 ΣF = 0 ΣF y = 0 T AD = W = 2,75kN Jaetaan voimat T AB ja T AC - ja y-akselin suuntaisiin komponentteihinsa (voimalla T AD on vain y-akselin suuntainen komponentti)
21 Esimerkki (jatkuu) ΣF = 0 ΣF y = 0 T AB 30 y T AC Jaetaan voimat T AB ja T AC - ja y-akselin suuntaisiin komponentteihinsa ΣF = 0 T AC, T AB, = 0 T AD = W = 2,75kN T AC 4 5 T AB cos 30 = 0 ΣF y = 0 T AC,y + T AB,y 2,75kN = 0 T AC T AB sin 30 2,75kN = 0
22 Esimerkki (jatkuu) Tasapainoyhtälöt: T AC 4 5 T AB cos 30 = 0 T AC = 5 4 T AB cos 30 T AC T AB sin 30 2,75kN = T AB cos T AB sin 30 2,75kN = 0 T AB 2,39 kn T AC 2,59kN

23 Esimerkki Radiaalilaakerin tukireaktiot ovat: Määritä tukireaktiot kitkattomissa radiaalilaakereissa A, B ja C. Piirretään rakenteen vapaakappalekuva. A z A y B z B C z C y
24 Esimerkki Määritä tukireaktiot kitkattomissa radiaalilaakereissa A, B ja C. Rakenteen vapaakappalekuva. Ratkaistaan kaikki tukireaktiot tasapainoyhtälöiden avulla. ΣF = 0 ΣF y = 0 ΣF Z = 0 Summataan voimat -akselin suuntaan: + ΣF = 0 B = 0 ΣM = 0 ΣM y = 0 ΣM z = 0 A z A y Summataan momentit z-akselin ympäri: + ΣM z = 0 C y 1m = 0 C y = 0 B z B C z C y Summataan voimat y-akselin suuntaan: + ΣF y = 0 A y = 0
25 Esimerkki Määritä tukireaktiot kitkattomissa radiaalilaakereissa A, B ja C. Rakenteen vapaakappalekuva. Ratkaistaan kaikki tukireaktiot tasapainoyhtälöiden avulla. ΣF = 0 ΣF y = 0 ΣF Z = 0 Summataan momentit -akselin ympäri: + ΣM = 0 ΣM = 0 ΣM y = 0 ΣM z = 0 A z B z 1800 N B z 0.6m 450N 1.2m + C z (1.2m) = 0 Summataan momentit y-akselin ympäri: + ΣM y = 0 C z 1350 B z 0.6m + 450N 0.6m C z (1m) = 0 B z = 1800 N C z = 1350 N
26 Esimerkki Määritä tukireaktiot kitkattomissa radiaalilaakereissa A, B ja C. Rakenteen vapaakappalekuva. Ratkaistaan kaikki tukireaktiot tasapainoyhtälöiden avulla. ΣF = 0 ΣF y = 0 ΣF Z = 0 Summataan voimat z-akselin suuntaan: + ΣF z = 0 ΣM = 0 ΣM y = 0 ΣM z = N A z 1800 N A z 1800N N 450N = 0 A z = 900 N 1350
27 Tasapaino Partikkeli tai jäykkä kappale on tasapainossa, kun se on paikallaan tai liikkuu vakionopeudella. ΣF = 0 ΣF = 0 ΣM = 0
28 Tasapaino Rakenne on tasapainossa, kun se on paikallaan tai liikkuu vakionopeudella. F BA (vetoa) F BA (vetoa) F BC (puristusta) F BC (puristusta) F BA (vetoa) F BC (puristusta) Kun rakenne on tasapainossa, myös kaikki sen osat ovat tasapainossa. A F BA A y A F CA F CA F CA F CA C y F BC C
29 Rakenteen vapaakappalekuvasta Koko rakenteen vapaakappalekuva. Koko rakenne on jäykkä kappale. Yksittäisten rakenneosien vapaakappalekuvia. Osat ovat partikkeleita tai jäykkiä kappaleita. Yksittäisten osien vapaakappalekuvista ratkaistaan osissa vaikuttavat voimat. F BA (vetoa) F BA (vetoa) F BC (puristusta) F BC (puristusta) A A y C y Koko rakenteen vapaakappalekuvasta ratkaistaan tukireaktiot. F BA (vetoa) F BC (puristusta)
30 Tasapaino Kun kappale on tasapainossa, myös sisäiset voimat ovat tasapainossa
31 Voimasysteemin ulkoiset vaikutukset ja rakenteen sisäiset voimat Kun tarkastellaan voimasysteemin aiheuttamia ulkoisia vaikutuksia, eli kappaleen liikettä tai tukireaktioita, voidaan useasta voimasta koostuva voimasysteemi korvata resultanttivoimalla ja resultanttimomentilla HUOM! Kun tarkastellaan kappaleen sisäisiä voimia, voimien vaikutuspisteitä ei saa muuttaa.
32 Voimasysteemin ulkoiset vaikutukset ja rakenteen sisäiset voimat A y F F B Kun tarkastelemme voimasysteemin ulkoisia vaikutuksia, voimme korvata voimasysteemin toisella samanarvoisella voimasysteemillä Ratkaistaan tukireaktiot ensin kuvan voimasysteemillä. A y a a M = Fa a B Sen jälkeen korvataan kuvan voimasysteemi samanarvoisella voimaparin momentilla ja ratkaistaan tukireaktiot. Sen jälkeen tarkastellaan sisäisiä voimia kuvan voimasysteemillä ja samanarvoisella voimaparin momentilla. a a a
33 Voimasysteemin ulkoiset vaikutukset ja rakenteen sisäiset voimat A A y F F B Ratkaistaan tukireaktiot tasapainoyhtälöiden avulla. Piirretään ensin palkin vapaakappalekuva. A y a a a B y + ΣF = 0 A = 0 + ΣM A = 0 Fa + F2a + B y 3a = 0 B y = 1 3 F + ΣF y = 0 A y F + F 1 3 F = 0 A y = 1 3 F
34 Voimasysteemin ulkoiset vaikutukset ja rakenteen sisäiset voimat A A y M = Fa B Korvataan voimapari samanarvoisella voimaparin momentilla ja ratkaistaan tukireaktiot tasapainoyhtälöiden avulla. Piirretään ensin palkin vapaakappalekuva. A y a a a B y + ΣF = 0 A = 0 + ΣM A = 0 Fa + B y 3a = 0 Voimasysteemit ovat samanarvoisia. Ne tuottivat saman ulkoisen vaikutuksen, eli tukireaktiot + ΣF y = 0 B y = 1 3 F A y 1 3 F = 0 A y = 1 3 F
35 Voimasysteemin ulkoiset vaikutukset ja rakenteen sisäiset voimat A y F F B Tarkastellaan palkin sisäisiä voimia. Piirretään leikkausvoiman ja taivutusmomentin kuvaajat. 1 a a a 3 F 1 3 F V V = F 1 3 F 1 3 F V = 1 3 F M dm d = 1 3 F dm d = 1 3 F 2 3 F V = F dm d = 2 3 F
36 Voimasysteemin ulkoiset vaikutukset ja rakenteen sisäiset voimat A y M = Fa 1 a a a 3 F 1 3 F V 1 3 F V = 1 3 F B Tarkastellaan palkin sisäisiä voimia. Piirretään leikkausvoiman ja taivutusmomentin kuvaajat. dm d = 1 3 F M a M = Fa a dm d = 1 3 F a Leikkausvoiman ja taivutusmomentin kuvaajat eivät ole samanlaiset kahdella samanarvoisella voimasysteemillä!
37 A y F F B A y M = Fa B 1 a a a 3 F 1 3 F V 1 a a a 3 F 1 3 F V M M
38 Yhteenveto Kertasimme statiikan kurssin sisältöä Partikkelin ja jäykän kappaleen mallit Kuormitukset, joita kappaleisiin kohdistuu Voima ja voiman momentti Harjoiteltiin esittämistä vektorimuodossa Jakaantunut voima Tukireaktiot Tasapainon periaate ja esimerkkitehtäviä Partikkelin tasapaino Jäykän kappaleen tasapaino Rakenteen tasapaino Sisäisten voimien tasapaino Tarkasteltiin voimasysteemin ulkoisia vaikutuksia ja sen aiheuttamia sisäisiä rasituksia
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 1.3.2016 Susanna Hurme Päivän aihe: Jäykän kappaleen tasapaino ja vapaakappalekuva (Kirjan luvut 5.1-5.4) Osaamistavoitteet: 1. Ymmärtää, mitä tukireaktiot ovat
KJR-C1001 Statiikka ja dynamiikka Luento 1.3.2016 Susanna Hurme Päivän aihe: Jäykän kappaleen tasapaino ja vapaakappalekuva (Kirjan luvut 5.1-5.4) Osaamistavoitteet: 1. Ymmärtää, mitä tukireaktiot ovat
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 23.2.2016 Susanna Hurme Tervetuloa kurssille! Mitä on statiikka? Mitä on dynamiikka? Miksi niitä opiskellaan? Päivän aihe: Voiman käsite ja partikkelin tasapaino
KJR-C1001 Statiikka ja dynamiikka Luento 23.2.2016 Susanna Hurme Tervetuloa kurssille! Mitä on statiikka? Mitä on dynamiikka? Miksi niitä opiskellaan? Päivän aihe: Voiman käsite ja partikkelin tasapaino
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 31.3.2016 Susanna Hurme Dynamiikan välikoe 4.4.2016 Ajankohta ma 4.4.2016 klo 16:30 19:30 Salijako Aalto-Sali: A-P (sukunimen alkukirjaimen mukaan) Ilmoittautuminen
KJR-C1001 Statiikka ja dynamiikka Luento 31.3.2016 Susanna Hurme Dynamiikan välikoe 4.4.2016 Ajankohta ma 4.4.2016 klo 16:30 19:30 Salijako Aalto-Sali: A-P (sukunimen alkukirjaimen mukaan) Ilmoittautuminen
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 8.3.2016 Susanna Hurme Päivän aihe: Normaalivoiman, leikkausvoiman ja taivutusmomentin käsitteet (Kirjan luku 7.1) Osaamistavoitteet: Ymmärtää, millaisia sisäisiä
KJR-C1001 Statiikka ja dynamiikka Luento 8.3.2016 Susanna Hurme Päivän aihe: Normaalivoiman, leikkausvoiman ja taivutusmomentin käsitteet (Kirjan luku 7.1) Osaamistavoitteet: Ymmärtää, millaisia sisäisiä
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 24.2.2016 Susanna Hurme Päivän aihe: Voiman momentin käsite (Kirjan luvut 4.1-4.6) Mikä on voiman momentti? Määritetään momentti skalaari- ja vektorimuodossa Opitaan
KJR-C1001 Statiikka ja dynamiikka Luento 24.2.2016 Susanna Hurme Päivän aihe: Voiman momentin käsite (Kirjan luvut 4.1-4.6) Mikä on voiman momentti? Määritetään momentti skalaari- ja vektorimuodossa Opitaan
KJR-C1001: Statiikka L5 Luento : Palkin normaali- ja leikkausvoima sekä taivutusmomentti
 KJR-C1001: Statiikka L5 Luento : Palkin normaali- ja leikkausvoima sekä taivutusmomentti Apulaisprofessori Konetekniikan laitos Statiikan välikoe 12.3.2018 Ajankohta ma 12.3.2018 klo 14:00 17:00 Salijako
KJR-C1001: Statiikka L5 Luento : Palkin normaali- ja leikkausvoima sekä taivutusmomentti Apulaisprofessori Konetekniikan laitos Statiikan välikoe 12.3.2018 Ajankohta ma 12.3.2018 klo 14:00 17:00 Salijako
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 2.3.2016 Susanna Hurme äivän aihe: Staattisesti määrätyn rakenteen tukireaktiot (Kirjan luvut 5.7 ja 6.6) Osaamistavoitteet: Ymmärtää, mitä tarkoittaa staattisesti
KJR-C1001 Statiikka ja dynamiikka Luento 2.3.2016 Susanna Hurme äivän aihe: Staattisesti määrätyn rakenteen tukireaktiot (Kirjan luvut 5.7 ja 6.6) Osaamistavoitteet: Ymmärtää, mitä tarkoittaa staattisesti
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 25.2.2016 Susanna Hurme Päivän aihe: Voimasysteemien samanarvoisuus ja jakaantuneen voiman käsite (Kirjan luvut 4.7-4.9) Osaamistavoitteet: 1. Ymmärtää, mikä on
KJR-C1001 Statiikka ja dynamiikka Luento 25.2.2016 Susanna Hurme Päivän aihe: Voimasysteemien samanarvoisuus ja jakaantuneen voiman käsite (Kirjan luvut 4.7-4.9) Osaamistavoitteet: 1. Ymmärtää, mikä on
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 3.3.2016 Susanna Hurme Päivän aihe: Ristikon sauvavoimat (Kirjan luvut 6.1-6.4) Osaamistavoitteet: Ymmärtää, mikä on ristikkorakenne Osata soveltaa aiemmin kurssilla
KJR-C1001 Statiikka ja dynamiikka Luento 3.3.2016 Susanna Hurme Päivän aihe: Ristikon sauvavoimat (Kirjan luvut 6.1-6.4) Osaamistavoitteet: Ymmärtää, mikä on ristikkorakenne Osata soveltaa aiemmin kurssilla
KJR-C1001: Statiikka L2 Luento : voiman momentti ja voimasysteemit
 KJR-C1001: Statiikka L2 Luento 21.2.2018: voiman momentti ja voimasysteemit Apulaisprofessori Konetekniikan laitos Luennon osaamistavoitteet Tämän päiväisen luennon jälkeen opiskelija Pystyy muodostamaan,
KJR-C1001: Statiikka L2 Luento 21.2.2018: voiman momentti ja voimasysteemit Apulaisprofessori Konetekniikan laitos Luennon osaamistavoitteet Tämän päiväisen luennon jälkeen opiskelija Pystyy muodostamaan,
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 9.3.2016 Susanna Hurme Päivän aihe: Palkin leikkausvoima- ja taivutusmomenttijakaumat ja kuviot (Kirjan luvut 7.2 ja 7.3) Osaamistavoitteet: Ymmärtää, miten leikkausvoima
KJR-C1001 Statiikka ja dynamiikka Luento 9.3.2016 Susanna Hurme Päivän aihe: Palkin leikkausvoima- ja taivutusmomenttijakaumat ja kuviot (Kirjan luvut 7.2 ja 7.3) Osaamistavoitteet: Ymmärtää, miten leikkausvoima
KJR-C1001: Statiikka L3 Luento : Jäykän kappaleen tasapaino
 KJR-C1001: Statiikka L3 Luento 27.2.2018: Jäykän kappaleen tasapaino Apulaisprofessori Konetekniikan laitos Luennon osaamistavoitteet Tämän päiväisen luennon (ja laskuharjoitusten) jälkeen opiskelija
KJR-C1001: Statiikka L3 Luento 27.2.2018: Jäykän kappaleen tasapaino Apulaisprofessori Konetekniikan laitos Luennon osaamistavoitteet Tämän päiväisen luennon (ja laskuharjoitusten) jälkeen opiskelija
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 16.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinetiikka (Kirjan luvut 12.6, 13.1-13.3 ja 17.3) Oppimistavoitteet Ymmärtää, miten Newtonin toisen lain
KJR-C1001 Statiikka ja dynamiikka Luento 16.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinetiikka (Kirjan luvut 12.6, 13.1-13.3 ja 17.3) Oppimistavoitteet Ymmärtää, miten Newtonin toisen lain
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 30.3.2016 Susanna Hurme Yleisen tasoliikkeen kinetiikka (Kirjan luku 17.5) Osaamistavoitteet Osata ratkaista voimia ja niiden aiheuttamia kiihtyvyyksiä tasoliikkeessä
KJR-C1001 Statiikka ja dynamiikka Luento 30.3.2016 Susanna Hurme Yleisen tasoliikkeen kinetiikka (Kirjan luku 17.5) Osaamistavoitteet Osata ratkaista voimia ja niiden aiheuttamia kiihtyvyyksiä tasoliikkeessä
STATIIKKA. TF00BN89 5op
 STATIIKKA TF00BN89 5op Sisältö: Statiikan peruslait Voiman resultantti ja jako komponentteihin Voiman momentti ja voimapari Partikkelin ja jäykän kappaleen tasapainoyhtälöt Tukivoimat Ristikot, palkit
STATIIKKA TF00BN89 5op Sisältö: Statiikan peruslait Voiman resultantti ja jako komponentteihin Voiman momentti ja voimapari Partikkelin ja jäykän kappaleen tasapainoyhtälöt Tukivoimat Ristikot, palkit
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 24.3.2016 Susanna Hurme Rotaatioliikkeen liike-energia, teho ja energiaperiaate (Kirjan luku 18) Osaamistavoitteet Ymmärtää, miten liike-energia määritetään kiinteän
KJR-C1001 Statiikka ja dynamiikka Luento 24.3.2016 Susanna Hurme Rotaatioliikkeen liike-energia, teho ja energiaperiaate (Kirjan luku 18) Osaamistavoitteet Ymmärtää, miten liike-energia määritetään kiinteän
RTEK-2000 Statiikan perusteet. 1. välikoe ke LUENTOSALEISSA K1705 klo 11:00-14:00 sekä S4 klo 11:15-14:15 S4 on sähkötalossa
 RTEK-2000 Statiikan perusteet 1. välikoe ke 27.2. LUENTOSALEISSA K1705 klo 11:00-14:00 sekä S4 klo 11:15-14:15 S4 on sähkötalossa RTEK-2000 Statiikan perusteet 4 op 1. välikoealue luennot 21.2. asti harjoitukset
RTEK-2000 Statiikan perusteet 1. välikoe ke 27.2. LUENTOSALEISSA K1705 klo 11:00-14:00 sekä S4 klo 11:15-14:15 S4 on sähkötalossa RTEK-2000 Statiikan perusteet 4 op 1. välikoealue luennot 21.2. asti harjoitukset
Harjoitus 4. KJR-C2001 Kiinteän aineen mekaniikan perusteet, IV/2016. Tehtävä 1 Selitä käsitteet kohdissa a) ja b) sekä laske c) kohdan tehtävä.
 ja b) sekä laske c) kohdan tehtävä.") Kotitehtävät palautetaan viimeistään keskiviikkoisin ennen luentojen alkua eli klo 14:00 mennessä. Muistakaa vastaukset eri tehtäviin palautetaan eri lokeroon! Joka kierroksen arvostellut kotitehtäväpaperit
Kotitehtävät palautetaan viimeistään keskiviikkoisin ennen luentojen alkua eli klo 14:00 mennessä. Muistakaa vastaukset eri tehtäviin palautetaan eri lokeroon! Joka kierroksen arvostellut kotitehtäväpaperit
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 23.3.2016 Susanna Hurme Rotaatioliikkeen kinetiikka: hitausmomentti ja liikeyhtälöt (Kirjan luvut 17.1, 17.2 ja 17.4) Osaamistavoitteet Ymmärtää hitausmomentin
KJR-C1001 Statiikka ja dynamiikka Luento 23.3.2016 Susanna Hurme Rotaatioliikkeen kinetiikka: hitausmomentti ja liikeyhtälöt (Kirjan luvut 17.1, 17.2 ja 17.4) Osaamistavoitteet Ymmärtää hitausmomentin
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 17.3.2016 Susanna Hurme Päivän aihe: Energian, työn ja tehon käsitteet sekä energiaperiaate (Kirjan luku 14) Osaamistavoitteet: Osata tarkastella partikkelin kinetiikkaa
KJR-C1001 Statiikka ja dynamiikka Luento 17.3.2016 Susanna Hurme Päivän aihe: Energian, työn ja tehon käsitteet sekä energiaperiaate (Kirjan luku 14) Osaamistavoitteet: Osata tarkastella partikkelin kinetiikkaa
Suora. Määritelmä. Oletetaan, että n = 2 tai n = 3. Avaruuden R n suora on joukko. { p + t v t R},
 Määritelmä Suora Oletetaan, että n = 2 tai n = 3. Avaruuden R n suora on joukko { p + t v t R}, missä p, v R n ja v 0. Tässä p on suoran jonkin pisteen paikkavektori ja v on suoran suuntavektori. v p LM1,
Määritelmä Suora Oletetaan, että n = 2 tai n = 3. Avaruuden R n suora on joukko { p + t v t R}, missä p, v R n ja v 0. Tässä p on suoran jonkin pisteen paikkavektori ja v on suoran suuntavektori. v p LM1,
SUORAN PALKIN TAIVUTUS
 SUORAN PALKIN TAIVUTUS KERTAUSTA! Palkin rasituslajit Palkki tasossa: Tasopalkin rasitukset, sisäiset voimat, ovat normaalivoima N, leikkausvoima Q ja taivutusmomentti M t. Ne voidaan isostaattisessa rakenteessa
SUORAN PALKIN TAIVUTUS KERTAUSTA! Palkin rasituslajit Palkki tasossa: Tasopalkin rasitukset, sisäiset voimat, ovat normaalivoima N, leikkausvoima Q ja taivutusmomentti M t. Ne voidaan isostaattisessa rakenteessa
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 29.3.2016 Susanna Hurme Yleisen tasoliikkeen kinematiikka: absoluuttinen ja suhteellinen liike, rajoitettu liike (Kirjan luvut 16.4-16.7) Osaamistavoitteet Ymmärtää,
KJR-C1001 Statiikka ja dynamiikka Luento 29.3.2016 Susanna Hurme Yleisen tasoliikkeen kinematiikka: absoluuttinen ja suhteellinen liike, rajoitettu liike (Kirjan luvut 16.4-16.7) Osaamistavoitteet Ymmärtää,
RAK Statiikka 4 op
 RAK-31000 Statiikka 4 op Opintojakson kotisivu on osoitteessa: http://webhotel2.tut.fi/mec_tme harjoitukset (H) harjoitusten malliratkaisut harjoitustyöt (HT) ja opasteet ilmoitusasiat RAK-31000 Statiikka
RAK-31000 Statiikka 4 op Opintojakson kotisivu on osoitteessa: http://webhotel2.tut.fi/mec_tme harjoitukset (H) harjoitusten malliratkaisut harjoitustyöt (HT) ja opasteet ilmoitusasiat RAK-31000 Statiikka
RAK Statiikka 4 op
 RAK-31000 Statiikka 4 op Opintojakson kotisivu on osoitteessa: http://webhotel2.tut.fi/mec_tme harjoitukset (H) harjoitusten malliratkaisut harjoitustyöt (HT) ja opasteet ilmoitusasiat RAK-31000 Statiikka
RAK-31000 Statiikka 4 op Opintojakson kotisivu on osoitteessa: http://webhotel2.tut.fi/mec_tme harjoitukset (H) harjoitusten malliratkaisut harjoitustyöt (HT) ja opasteet ilmoitusasiat RAK-31000 Statiikka
SUORAN PALKIN RASITUKSET
 SUORAN PALKIN RASITUKSET Palkilla tarkoitetaan pitkänomaista rakenneosaa, jota voidaan käsitellä yksiulotteisena eli viivamaisena. Palkkia kuormitetaan pääasiassa poikittaisilla kuormituksilla, mutta usein
SUORAN PALKIN RASITUKSET Palkilla tarkoitetaan pitkänomaista rakenneosaa, jota voidaan käsitellä yksiulotteisena eli viivamaisena. Palkkia kuormitetaan pääasiassa poikittaisilla kuormituksilla, mutta usein
Tukilaitteet
 Tukilaitteet Tukemattomalla kappaleella on tasossa 3 liikemahdollisuutta, vapausastetta. Kun halutaan, että kappale on tasapainossa, on nämä liikemahdollisuudet poistettava kättämällä tukilaitteita. Tuet
Tukilaitteet Tukemattomalla kappaleella on tasossa 3 liikemahdollisuutta, vapausastetta. Kun halutaan, että kappale on tasapainossa, on nämä liikemahdollisuudet poistettava kättämällä tukilaitteita. Tuet
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys102 Kevät 2010 Jukka Maalampi LUENTO 2-3 Vääntömomentti Oletus: Voimat tasossa, joka on kohtisuorassa pyörimisakselia vastaan. Oven kääntämiseen tarvitaan eri suuruinen voima
Mekaniikan jatkokurssi Fys102 Kevät 2010 Jukka Maalampi LUENTO 2-3 Vääntömomentti Oletus: Voimat tasossa, joka on kohtisuorassa pyörimisakselia vastaan. Oven kääntämiseen tarvitaan eri suuruinen voima
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 22.3.2016 Susanna Hurme Päivän aihe: Rotaatioliikkeen kinematiikka: kulmanopeus ja -kiihtyvyys (Kirjan luvut 12.7, 16.3) Osaamistavoitteet Osata analysoida jäykän
KJR-C1001 Statiikka ja dynamiikka Luento 22.3.2016 Susanna Hurme Päivän aihe: Rotaatioliikkeen kinematiikka: kulmanopeus ja -kiihtyvyys (Kirjan luvut 12.7, 16.3) Osaamistavoitteet Osata analysoida jäykän
Rakenteiden mekaniikka TF00BO01, 5op
 Rakenteiden mekaniikka TF00BO01, 5op Sisältö: Nivelpalkit Kehät Virtuaalisen työn periaate sauvarakenteelle Muodonmuutosten laskeminen Hyperstaattiset rakenteet Voimamenetelmä Crossin momentintasausmenetelmä
Rakenteiden mekaniikka TF00BO01, 5op Sisältö: Nivelpalkit Kehät Virtuaalisen työn periaate sauvarakenteelle Muodonmuutosten laskeminen Hyperstaattiset rakenteet Voimamenetelmä Crossin momentintasausmenetelmä
Havainnollistuksia: Merkitään w = ( 4, 3) ja v = ( 3, 2). Tällöin. w w = ( 4) 2 + ( 3) 2 = 25 = 5. v = ( 3) = 13. v = v.
 ja v = ( 3, 2). Tällöin. w w = ( 4) 2 + ( 3) 2 = 25 = 5. v = ( 3) = 13. v = v.") Havainnollistuksia: Merkitään w = ( 4, 3) ja v = ( 3, 2). Tällöin w = w w = ( 4) 2 + ( 3) 2 = 25 = 5 v = v v = ( 3) 2 + 2 2 = 13. w =5 3 2 v = 13 4 3 LM1, Kesä 2014 76/102 Normin ominaisuuksia I Lause
Havainnollistuksia: Merkitään w = ( 4, 3) ja v = ( 3, 2). Tällöin w = w w = ( 4) 2 + ( 3) 2 = 25 = 5 v = v v = ( 3) 2 + 2 2 = 13. w =5 3 2 v = 13 4 3 LM1, Kesä 2014 76/102 Normin ominaisuuksia I Lause
Kertausosa. 5. Merkitään sädettä kirjaimella r. Kaaren pituus on tällöin r a) sin = 0, , c) tan = 0,
 sin = 0, , c) tan = 0,") Kertausosa. a),6 60 576 Peruuttaessa pyörähdyssuunta on vastapäivään. Kulma on siis,4 60 864 a) 576 864 0,88m. a) α b 0,6769... 0,68 (rad) r,m 8cm β,90...,9 (rad) 4cm a) α 0,68 (rad) β,9 (rad). a) 5,0
Kertausosa. a),6 60 576 Peruuttaessa pyörähdyssuunta on vastapäivään. Kulma on siis,4 60 864 a) 576 864 0,88m. a) α b 0,6769... 0,68 (rad) r,m 8cm β,90...,9 (rad) 4cm a) α 0,68 (rad) β,9 (rad). a) 5,0
0, niin vektorit eivät ole kohtisuorassa toisiaan vastaan.
 Tekijä Pitkä matematiikka 4 9.1.016 168 a) Lasketaan vektorien a ja b pistetulo. a b = (3i + 5 j) (7i 3 j) = 3 7 + 5 ( 3) = 1 15 = 6 Koska pistetulo a b 0, niin vektorit eivät ole kohtisuorassa toisiaan
Tekijä Pitkä matematiikka 4 9.1.016 168 a) Lasketaan vektorien a ja b pistetulo. a b = (3i + 5 j) (7i 3 j) = 3 7 + 5 ( 3) = 1 15 = 6 Koska pistetulo a b 0, niin vektorit eivät ole kohtisuorassa toisiaan
RTEK-2000 Statiikan perusteet 4 op
 RTEK-2000 Statiikan perusteet 4 op Opintojakson kotisivu on osoitteessa: http://webhotel2.tut.fi/mec_tme harjoitukset (H) harjoitusten malliratkaisut harjoitustyöt (HT) ja opasteet ilmoitusasiat Osaamistavoitteet
RTEK-2000 Statiikan perusteet 4 op Opintojakson kotisivu on osoitteessa: http://webhotel2.tut.fi/mec_tme harjoitukset (H) harjoitusten malliratkaisut harjoitustyöt (HT) ja opasteet ilmoitusasiat Osaamistavoitteet
Voimapari ja sen momentti
 Rakenteiden Mekaniikka Vol. 49, Nro, 06, s. 78-55 rmseura.tkk.fi/rmlehti/ Kirjoittajat 06. Vapaasti saatavilla CC BY-SA 4.0 lisensioitu. Voimapari ja sen momentti Tapio Salmi Tiivistelmä. Artikkelissa
Rakenteiden Mekaniikka Vol. 49, Nro, 06, s. 78-55 rmseura.tkk.fi/rmlehti/ Kirjoittajat 06. Vapaasti saatavilla CC BY-SA 4.0 lisensioitu. Voimapari ja sen momentti Tapio Salmi Tiivistelmä. Artikkelissa
A-osio. Tehdään ilman laskinta ja taulukkokirjaa! Valitse tehtävistä A1-A3 kaksi ja vastaa niihin. Maksimissaan tunti aikaa suorittaa A-osiota.
 MAA5.2 Loppukoe 24.9.2013 Jussi Tyni Valitse 6 tehtävää Muista merkitä vastauspaperiin oma nimesi ja tee etusivulle pisteytysruudukko Kaikkiin tehtävien ratkaisuihin välivaiheet näkyviin! A1. A-osio. Tehdään
MAA5.2 Loppukoe 24.9.2013 Jussi Tyni Valitse 6 tehtävää Muista merkitä vastauspaperiin oma nimesi ja tee etusivulle pisteytysruudukko Kaikkiin tehtävien ratkaisuihin välivaiheet näkyviin! A1. A-osio. Tehdään
Mb8 Koe Kuopion Lyseon lukio (KK) sivu 1/2
 sivu 1/2") Mb8 Koe 0.11.015 Kuopion Lyseon lukio (KK) sivu 1/ Kokeessa on kaksi osaa. Osa A ratkaistaan tehtäväpaperille ja osa B ratkaistaan konseptipaperille. Osa A: saat käyttää taulukkokirjaa mutta et laskinta.
Mb8 Koe 0.11.015 Kuopion Lyseon lukio (KK) sivu 1/ Kokeessa on kaksi osaa. Osa A ratkaistaan tehtäväpaperille ja osa B ratkaistaan konseptipaperille. Osa A: saat käyttää taulukkokirjaa mutta et laskinta.
Tasokehät. Kuva. Sauvojen alapuolet merkittyinä.
 Tasokehät Tasokehä muodostuu yksinkertaisista palkeista ja ulokepalkeista, joita yhdistetään toisiinsa jäykästi tai nivelkehässä nivelellisesti. Palkit voivat olla tasossa missä kulmassa tahansa. Palkkikannattimessa
Tasokehät Tasokehä muodostuu yksinkertaisista palkeista ja ulokepalkeista, joita yhdistetään toisiinsa jäykästi tai nivelkehässä nivelellisesti. Palkit voivat olla tasossa missä kulmassa tahansa. Palkkikannattimessa
Voimat mekanismeissa. Kari Tammi, Tommi Lintilä (Janne Ojalan kalvoista)
") 1 Voimat mekanismeissa Kari Tammi, Tommi Lintilä (Janne Ojalan kalvoista) 12.2.2016 Sisältö Staattiset voimat Staattinen tasapainotila Vapaakappalekuva Tasapainoyhtälöt Kitkavoimat Hitausvoimat Hitausvoimien
1 Voimat mekanismeissa Kari Tammi, Tommi Lintilä (Janne Ojalan kalvoista) 12.2.2016 Sisältö Staattiset voimat Staattinen tasapainotila Vapaakappalekuva Tasapainoyhtälöt Kitkavoimat Hitausvoimat Hitausvoimien
Juuri 4 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty Kertaus. b) B = (3, 0, 5) K2. ( )
 B = (3, 0, 5) K2. ( )") Kertaus K1. a) OA =- i + j + k K. b) B = (, 0, 5) K. a) AB = (6 -(- )) i + ( - ) j + (- -(- 7)) k = 8i - j + 4k AB = 8 + (- 1) + 4 = 64+ 1+ 16 = 81= 9 b) 1 1 ( ) AB = (--(- 1)) i + - - 1 j =-i - 4j AB
Kertaus K1. a) OA =- i + j + k K. b) B = (, 0, 5) K. a) AB = (6 -(- )) i + ( - ) j + (- -(- 7)) k = 8i - j + 4k AB = 8 + (- 1) + 4 = 64+ 1+ 16 = 81= 9 b) 1 1 ( ) AB = (--(- 1)) i + - - 1 j =-i - 4j AB
Analysoidaan lämpöjännitysten, jännityskeskittymien, plastisten muodonmuutosten ja jäännösjännityksien vaikutus
 TAVOITTEET Määritetään aksiaalisesti kuormitetun sauvan muodonmuutos Esitetään menetelmä, jolla ratkaistaan tukireaktiot tapauksessa, jossa statiikan tasapainoehdot eivät riitä Analysoidaan lämpöjännitysten,
TAVOITTEET Määritetään aksiaalisesti kuormitetun sauvan muodonmuutos Esitetään menetelmä, jolla ratkaistaan tukireaktiot tapauksessa, jossa statiikan tasapainoehdot eivät riitä Analysoidaan lämpöjännitysten,
Ristitulolle saadaan toinen muistisääntö determinantin avulla. Vektoreiden v ja w ristitulo saadaan laskemalla determinantti
 14 Ristitulo Avaruuden R 3 vektoreille voidaan määritellä pistetulon lisäksi niin kutsuttu ristitulo. Pistetulosta poiketen ristitulon tulos ei ole reaaliluku vaan avaruuden R 3 vektori. Ristitulosta on
14 Ristitulo Avaruuden R 3 vektoreille voidaan määritellä pistetulon lisäksi niin kutsuttu ristitulo. Pistetulosta poiketen ristitulon tulos ei ole reaaliluku vaan avaruuden R 3 vektori. Ristitulosta on
Aksiaalisella tai suoralla leikkauksella kuormitettujen rakenneosien lujuusopillinen analyysi ja suunnittelu
 TAVOITTEET Statiikan kertausta Kappaleen sisäiset rasitukset Normaali- ja leikkausjännitys Aksiaalisella tai suoralla leikkauksella kuormitettujen rakenneosien lujuusopillinen analyysi ja suunnittelu 1
TAVOITTEET Statiikan kertausta Kappaleen sisäiset rasitukset Normaali- ja leikkausjännitys Aksiaalisella tai suoralla leikkauksella kuormitettujen rakenneosien lujuusopillinen analyysi ja suunnittelu 1
RAK-31000 Statiikka 4 op
 RAK-31000 Statiikka 4 op Opintojakson kotisivu on osoitteessa: http://webhotel2.tut.fi/mec_tme harjoitukset (H) harjoitusten malliratkaisut harjoitustyöt (HT) ja opasteet ilmoitusasiat RAK-31000 Statiikka
RAK-31000 Statiikka 4 op Opintojakson kotisivu on osoitteessa: http://webhotel2.tut.fi/mec_tme harjoitukset (H) harjoitusten malliratkaisut harjoitustyöt (HT) ja opasteet ilmoitusasiat RAK-31000 Statiikka
Tekijä Pitkä matematiikka On osoitettava, että jana DE sivun AB kanssa yhdensuuntainen ja sen pituus on 4 5
 Tekijä Pitkä matematiikka 6..06 8 On osoitettava, että jana DE sivun AB kanssa yhdensuuntainen ja sen pituus on 5 sivun AB pituudesta. Pitää siis osoittaa, että DE = AB. 5 Muodostetaan vektori DE. DE =
Tekijä Pitkä matematiikka 6..06 8 On osoitettava, että jana DE sivun AB kanssa yhdensuuntainen ja sen pituus on 5 sivun AB pituudesta. Pitää siis osoittaa, että DE = AB. 5 Muodostetaan vektori DE. DE =
Tekijä Pitkä matematiikka Poistetaan yhtälöparista muuttuja s ja ratkaistaan muuttuja r.
 Tekijä Pitkä matematiikka 4 16.12.2016 K1 Poistetaan yhtälöparista muuttuja s ja ratkaistaan muuttuja r. 3 r s = 0 4 r+ 4s = 2 12r 4s = 0 + r+ 4s = 2 13 r = 2 r = 2 13 2 Sijoitetaan r = esimerkiksi yhtälöparin
Tekijä Pitkä matematiikka 4 16.12.2016 K1 Poistetaan yhtälöparista muuttuja s ja ratkaistaan muuttuja r. 3 r s = 0 4 r+ 4s = 2 12r 4s = 0 + r+ 4s = 2 13 r = 2 r = 2 13 2 Sijoitetaan r = esimerkiksi yhtälöparin
ARK-A.3000 Rakennetekniikka (4op) Rakenteiden mekaniikka II. Dipl.Ins. Hannu Hirsi.
 Rakenteiden mekaniikka II. Dipl.Ins. Hannu Hirsi.") ARK-A.3000 Rakennetekniikka (4op) Rakenteiden mekaniikka II Dipl.Ins. Hannu Hirsi. Objectives in lecture 2 of mechanics : A thorough understanding of how to draw and use a freebody diagram is absolutely
ARK-A.3000 Rakennetekniikka (4op) Rakenteiden mekaniikka II Dipl.Ins. Hannu Hirsi. Objectives in lecture 2 of mechanics : A thorough understanding of how to draw and use a freebody diagram is absolutely
9. Vektorit. 9.1 Skalaarit ja vektorit. 9.2 Vektorit tasossa
 9. Vektorit 9.1 Skalaarit ja vektorit Skalaari on koon tai määrän mitta. Tyypillinen esimerkki skalaarista on massa. Lukumäärä on toinen hyvä esimerkki skalaarista. Vektorilla on taas suuruus ja suunta.
9. Vektorit 9.1 Skalaarit ja vektorit Skalaari on koon tai määrän mitta. Tyypillinen esimerkki skalaarista on massa. Lukumäärä on toinen hyvä esimerkki skalaarista. Vektorilla on taas suuruus ja suunta.
Materiaalien mekaniikka
 Materiaalien mekaniikka 3. harjoitus jännitys ja tasapainoyhtälöt 1. Onko seuraava jännityskenttä tasapainossa kun tilavuusvoimia ei ole: σ x = σ 0 ( 3x L + 4xy 8y ), σ y = σ 0 ( x L xy + 3y ), τ xy =
Materiaalien mekaniikka 3. harjoitus jännitys ja tasapainoyhtälöt 1. Onko seuraava jännityskenttä tasapainossa kun tilavuusvoimia ei ole: σ x = σ 0 ( 3x L + 4xy 8y ), σ y = σ 0 ( x L xy + 3y ), τ xy =
10 knm mm 1000 (a) Kuva 1. Tasokehä ja sen elementtiverkko.
 Kuva 1. Tasokehä ja sen elementtiverkko.") Elementtimenetelmän perusteet Esimerkki. kn kn/m 5 = 8 E= GPa mm 5 5 mm (a) 5 5 6 Y X (b) Kuva. Tasokehä ja sen elementtiverkko. Tarkastellaan kuvassa (a) olevan tasokehän statiikan ratkaisemista elementtimenetelmällä.
Elementtimenetelmän perusteet Esimerkki. kn kn/m 5 = 8 E= GPa mm 5 5 mm (a) 5 5 6 Y X (b) Kuva. Tasokehä ja sen elementtiverkko. Tarkastellaan kuvassa (a) olevan tasokehän statiikan ratkaisemista elementtimenetelmällä.
Fysiikan perusteet. Voimat ja kiihtyvyys. Antti Haarto
 Fysiikan perusteet Voimat ja kiihtyvyys Antti Haarto.05.01 Voima Vuorovaikutusta kahden kappaleen välillä tai kappaleen ja sen ympäristön välillä (Kenttävoimat) Yksikkö: newton, N = kgm/s Vektorisuure
Fysiikan perusteet Voimat ja kiihtyvyys Antti Haarto.05.01 Voima Vuorovaikutusta kahden kappaleen välillä tai kappaleen ja sen ympäristön välillä (Kenttävoimat) Yksikkö: newton, N = kgm/s Vektorisuure
Yleistä vektoreista GeoGebralla
 Vektoreita GeoGebralla Vektoreilla voi laskea joko komentopohjaisesti esim. CAS-ikkunassa tai piirtämällä piirtoikkunassa. Ensimmäisen tavan etuna on, että laskujen tueksi muodostuu kuva. Tästä on varmasti
Vektoreita GeoGebralla Vektoreilla voi laskea joko komentopohjaisesti esim. CAS-ikkunassa tai piirtämällä piirtoikkunassa. Ensimmäisen tavan etuna on, että laskujen tueksi muodostuu kuva. Tästä on varmasti
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 10: Moninkertaisten integraalien sovelluksia
 Luento 10: Moninkertaisten integraalien sovelluksia") MS-A22 ifferentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Moninkertaisten integraalien sovelluksia Antti Rasila Aalto-yliopisto Syksy 215 Antti Rasila (Aalto-yliopisto) MS-A22 Syksy 215 1 / 2 Moninkertaisten
MS-A22 ifferentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Moninkertaisten integraalien sovelluksia Antti Rasila Aalto-yliopisto Syksy 215 Antti Rasila (Aalto-yliopisto) MS-A22 Syksy 215 1 / 2 Moninkertaisten
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 10: Moninkertaisten integraalien sovelluksia
 Luento 10: Moninkertaisten integraalien sovelluksia") MS-A22 ifferentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Moninkertaisten integraalien sovelluksia Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 217 Antti Rasila (Aalto-yliopisto)
MS-A22 ifferentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Moninkertaisten integraalien sovelluksia Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 217 Antti Rasila (Aalto-yliopisto)
Tekijä Pitkä matematiikka b) Kuvasta nähdään, että b = i 4 j. c) Käytetään a- ja b-kohtien tuloksia ja muokataan lauseketta.
 Kuvasta nähdään, että b = i 4 j. c) Käytetään a- ja b-kohtien tuloksia ja muokataan lauseketta.") Tekijä Pitkä matematiikka 4 9.1.016 79 a) Kuvasta nähdään, että a = 3i + j. b) Kuvasta nähdään, että b = i 4 j. c) Käytetään a- ja b-kohtien tuloksia ja muokataan lauseketta. 5a b = 5(3i + j) ( i 4 j)
Tekijä Pitkä matematiikka 4 9.1.016 79 a) Kuvasta nähdään, että a = 3i + j. b) Kuvasta nähdään, että b = i 4 j. c) Käytetään a- ja b-kohtien tuloksia ja muokataan lauseketta. 5a b = 5(3i + j) ( i 4 j)
Luento 10: Työ, energia ja teho. Johdanto Työ ja kineettinen energia Teho
 Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho 1 / 23 Luennon sisältö Johdanto Työ ja kineettinen energia Teho 2 / 23 Johdanto Energia suure, joka voidaan muuttaa muodosta toiseen,
Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho 1 / 23 Luennon sisältö Johdanto Työ ja kineettinen energia Teho 2 / 23 Johdanto Energia suure, joka voidaan muuttaa muodosta toiseen,
Vektoreiden A = (A1, A 2, A 3 ) ja B = (B1, B 2, B 3 ) pistetulo on. Edellisestä seuraa
 ja B = (B1, B 2, B 3 ) pistetulo on. Edellisestä seuraa") Viikon aiheet Pistetulo (skalaaritulo Vektorien tulot Pistetulo Ristitulo Skalaari- ja vektorikolmitulo Integraalifunktio, alkeisfunktioiden integrointi, yhdistetyn funktion derivaatan integrointi Vektoreiden
Viikon aiheet Pistetulo (skalaaritulo Vektorien tulot Pistetulo Ristitulo Skalaari- ja vektorikolmitulo Integraalifunktio, alkeisfunktioiden integrointi, yhdistetyn funktion derivaatan integrointi Vektoreiden
Suhteellinen nopeus. Matkustaja P kävelee nopeudella 1.0 m/s pitkin 3.0 m/s nopeudella etenevän junan B käytävää
 3.5 Suhteellinen nopeus Matkustaja P kävelee nopeudella 1.0 m/s pitkin 3.0 m/s nopeudella etenevän junan B käytävää P:n nopeus junassa istuvan toisen matkustajan suhteen on v P/B-x = 1.0 m/s Intuitio :
3.5 Suhteellinen nopeus Matkustaja P kävelee nopeudella 1.0 m/s pitkin 3.0 m/s nopeudella etenevän junan B käytävää P:n nopeus junassa istuvan toisen matkustajan suhteen on v P/B-x = 1.0 m/s Intuitio :
Harjoitus 7. KJR-C2001 Kiinteän aineen mekaniikan perusteet, IV/2016
 Kotitehtävät palautetaan viimeistään keskiviikkoisin ennen luentojen alkua eli klo 4: mennessä. Muistakaa vastaukset eri tehtäviin palautetaan eri lokeroon! Joka kierroksen arvostellut kotitehtäväpaperit
Kotitehtävät palautetaan viimeistään keskiviikkoisin ennen luentojen alkua eli klo 4: mennessä. Muistakaa vastaukset eri tehtäviin palautetaan eri lokeroon! Joka kierroksen arvostellut kotitehtäväpaperit
Luvun 5 laskuesimerkit
 Luvun 5 laskuesimerkit Huom: luvun 4 kohdalla luennolla ei ollut laskuesimerkkejä, vaan koko luvun 5 voi nähdä kokoelmana sovellusesimerkkejä edellisen luvun asioihin! Esimerkki 5.1 Moottori roikkuu oheisen
Luvun 5 laskuesimerkit Huom: luvun 4 kohdalla luennolla ei ollut laskuesimerkkejä, vaan koko luvun 5 voi nähdä kokoelmana sovellusesimerkkejä edellisen luvun asioihin! Esimerkki 5.1 Moottori roikkuu oheisen
DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi
 Arttu Polojärvi") DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Suhteellisen liikkeen nopeuden ja kiihtyvyyden yhtälöt. Jäykän kappaleen partikkelin liike. Jäykän
DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Suhteellisen liikkeen nopeuden ja kiihtyvyyden yhtälöt. Jäykän kappaleen partikkelin liike. Jäykän
Juuri 4 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty Kertaus. b) B = (3, 0, 5) K2. 8 ( 1)
 B = (3, 0, 5) K2. 8 ( 1)") Kertaus K1. a) OA i k b) B = (, 0, 5) K. K. a) AB (6 ( )) i () ( ( 7)) k 8i 4k AB 8 ( 1) 4 64116 819 b) 1 1 AB( ( 1)) i 1 i 4 AB ( ) ( 4) 416 0 45 5 K4. a) AB AO OB OA OB ( i ) i i i 5i b) Pisteen A paikkavektori
Kertaus K1. a) OA i k b) B = (, 0, 5) K. K. a) AB (6 ( )) i () ( ( 7)) k 8i 4k AB 8 ( 1) 4 64116 819 b) 1 1 AB( ( 1)) i 1 i 4 AB ( ) ( 4) 416 0 45 5 K4. a) AB AO OB OA OB ( i ) i i i 5i b) Pisteen A paikkavektori
Vektorien pistetulo on aina reaaliluku. Esimerkiksi vektorien v = (3, 2, 0) ja w = (1, 2, 3) pistetulo on
 ja w = (1, 2, 3) pistetulo on") 13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys10 Syksy 009 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
Mekaniikan jatkokurssi Fys10 Syksy 009 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
A B = (1, q, q 2 ) (2, 0, 2) = 2 2q q 2 = 0 q 2 = 1 q = ±1 A(±1) = (1, ±1, 1) A(1) A( 1) = (1, 1, 1) (1, 1, 1) = A( 1) A(1) A( 1) = 1
 (2, 0, 2) = 2 2q q 2 = 0 q 2 = 1 q = ±1 A(±1) = (1, ±1, 1) A(1) A( 1) = (1, 1, 1) (1, 1, 1) = A( 1) A(1) A( 1) = 1") Mapu I Viikko 4 tehtävä malli Millä q:n arvoilla vektori A(q) (, q, q ) on kohtisuora vektorin B (, 0, ) kanssa? Ovatko A:n eri ratkaisut keskenään kohtisuoria? Jos eivät, määrää niiden välinen kulma!
Mapu I Viikko 4 tehtävä malli Millä q:n arvoilla vektori A(q) (, q, q ) on kohtisuora vektorin B (, 0, ) kanssa? Ovatko A:n eri ratkaisut keskenään kohtisuoria? Jos eivät, määrää niiden välinen kulma!
KJR-C1001 Statiikka ja dynamiikka Kurssiesite, kevät 2016
 1 (9) KJR-C1001 Statiikka ja dynamiikka Kurssiesite, kevät 2016 Aalto University Postal address Visiting address Tel. +358 9 47001 aalto.fi/en School of Engineering P.O. Box 14100 Otakaari 4 firstname.lastname@aalto.fi
1 (9) KJR-C1001 Statiikka ja dynamiikka Kurssiesite, kevät 2016 Aalto University Postal address Visiting address Tel. +358 9 47001 aalto.fi/en School of Engineering P.O. Box 14100 Otakaari 4 firstname.lastname@aalto.fi
Luvun 5 laskuesimerkit
 Luvun 5 laskuesimerkit Esimerkki 5.1 Moottori roikkuu oheisen kuvan mukaisessa ripustuksessa. a) Mitkä ovat kahleiden jännitykset? b) Mikä kahleista uhkaa katketa ensimmäisenä? Piirretäänpä parit vapaakappalekuvat.
Luvun 5 laskuesimerkit Esimerkki 5.1 Moottori roikkuu oheisen kuvan mukaisessa ripustuksessa. a) Mitkä ovat kahleiden jännitykset? b) Mikä kahleista uhkaa katketa ensimmäisenä? Piirretäänpä parit vapaakappalekuvat.
Mb8 Koe Kuopion Lyseon lukio (KK) sivu 1/3
 sivu 1/3") Mb8 Koe 4.11.015 Kuopion Lyseon lukio (KK) sivu 1/3 Kokeessa on kaksi osaa. Osa A ratkaistaan tehtäväpaperille ja osa B ratkaistaan konseptipaperille. Osa A: saat käyttää taulukkokirjaa mutta et laskinta.
Mb8 Koe 4.11.015 Kuopion Lyseon lukio (KK) sivu 1/3 Kokeessa on kaksi osaa. Osa A ratkaistaan tehtäväpaperille ja osa B ratkaistaan konseptipaperille. Osa A: saat käyttää taulukkokirjaa mutta et laskinta.
Lineaarialgebra MATH.1040 / voima
 Lineaarialgebra MATH.1040 / voima 1 Seuraavaksi määrittelemme kaksi vektoreille määriteltyä tuloa; pistetulo ja. Määritelmät ja erilaiset tulojen ominaisuudet saattavat tuntua, sekavalta kokonaisuudelta.
Lineaarialgebra MATH.1040 / voima 1 Seuraavaksi määrittelemme kaksi vektoreille määriteltyä tuloa; pistetulo ja. Määritelmät ja erilaiset tulojen ominaisuudet saattavat tuntua, sekavalta kokonaisuudelta.
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys10 Kevät 010 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
Mekaniikan jatkokurssi Fys10 Kevät 010 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
TAVOITTEET Määrittää taivutuksen normaalijännitykset Miten määritetään leikkaus- ja taivutusmomenttijakaumat
 TAVOITTEET Määrittää taivutuksen normaalijännitykset Miten määritetään leikkaus- ja taivutusmomenttijakaumat Lasketaan suurimmat leikkaus- ja taivutusrasitukset Analysoidaan sauvoja, jotka ovat suoria,
TAVOITTEET Määrittää taivutuksen normaalijännitykset Miten määritetään leikkaus- ja taivutusmomenttijakaumat Lasketaan suurimmat leikkaus- ja taivutusrasitukset Analysoidaan sauvoja, jotka ovat suoria,
Lineaarialgebra ja matriisilaskenta I. LM1, Kesä /218
 Lineaarialgebra ja matriisilaskenta I LM1, Kesä 2012 1/218 Avaruuden R 2 vektorit Määritelmä (eli sopimus) Avaruus R 2 on kaikkien reaalilukuparien joukko; toisin sanottuna R 2 = { (a, b) a R ja b R }.
Lineaarialgebra ja matriisilaskenta I LM1, Kesä 2012 1/218 Avaruuden R 2 vektorit Määritelmä (eli sopimus) Avaruus R 2 on kaikkien reaalilukuparien joukko; toisin sanottuna R 2 = { (a, b) a R ja b R }.
VEKTORIT paikkavektori OA
 paikkavektori OA Piste A = (2, -1) Paikkavektori OA = 2i j 3D: kuvan piirtäminen hankalaa Piste A = (2, -3, 4) Paikkavektori OA = 2i 3j + 4k Piste A = (a 1, a 2, a 3 ) Paikkavektori OA = a 1 i + a 2 j
paikkavektori OA Piste A = (2, -1) Paikkavektori OA = 2i j 3D: kuvan piirtäminen hankalaa Piste A = (2, -3, 4) Paikkavektori OA = 2i 3j + 4k Piste A = (a 1, a 2, a 3 ) Paikkavektori OA = a 1 i + a 2 j
Yhteenlaskun ja skalaarilla kertomisen ominaisuuksia
 Yhteenlaskun ja skalaarilla kertomisen ominaisuuksia Voidaan osoittaa, että avaruuden R n vektoreilla voidaan laskea tuttujen laskusääntöjen mukaan. Huom. Lause tarkoittaa väitettä, joka voidaan perustella
Yhteenlaskun ja skalaarilla kertomisen ominaisuuksia Voidaan osoittaa, että avaruuden R n vektoreilla voidaan laskea tuttujen laskusääntöjen mukaan. Huom. Lause tarkoittaa väitettä, joka voidaan perustella
Tekijä Pitkä matematiikka Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4).
, ( 2,1), (1, 0), (4, 1) ja ( 11, 4).") Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
HYPERSTAATTISET RAKENTEET
 HYPERSTAATTISET RAKENTEET Yleistä Sauva ja palkkirakenne on on isostaattinen, jos tasapainoehdot yksin riittävät sen tukireaktioiden ja rasitusten määrittämiseen. Jos näiden voimasuureiden määrittäminen
HYPERSTAATTISET RAKENTEET Yleistä Sauva ja palkkirakenne on on isostaattinen, jos tasapainoehdot yksin riittävät sen tukireaktioiden ja rasitusten määrittämiseen. Jos näiden voimasuureiden määrittäminen
Määritetään vääntökuormitetun sauvan kiertymä kimmoisella kuormitusalueella Tutkitaan staattisesti määräämättömiä vääntösauvoja
 TAVOITTEET Tutkitaan väännön vaikutusta suoraan sauvaan Määritetään vääntökuormitetun sauvan jännitysjakauma Määritetään vääntökuormitetun sauvan kiertymä kimmoisella kuormitusalueella Tutkitaan staattisesti
TAVOITTEET Tutkitaan väännön vaikutusta suoraan sauvaan Määritetään vääntökuormitetun sauvan jännitysjakauma Määritetään vääntökuormitetun sauvan kiertymä kimmoisella kuormitusalueella Tutkitaan staattisesti
Kitka ja Newtonin lakien sovellukset
 Kitka ja Newtonin lakien sovellukset Haarto & Karhunen Tavallisimpia voimia: Painovoima G Normaalivoima, Tukivoima Jännitysvoimat Kitkavoimat Voimat yleisesti F f T ja s f k N Vapaakappalekuva Kuva, joka
Kitka ja Newtonin lakien sovellukset Haarto & Karhunen Tavallisimpia voimia: Painovoima G Normaalivoima, Tukivoima Jännitysvoimat Kitkavoimat Voimat yleisesti F f T ja s f k N Vapaakappalekuva Kuva, joka
MUODONMUUTOKSET. Lähtöotaksumat:
 MUODONMUUTOKSET Lähtöotaksumat:. Materiaali on isotrooppista ja homogeenista. Hooken laki on voimassa (fysikaalinen lineaarisuus) 3. Bernoullin hypoteesi on voimassa (tekninen taivutusteoria) 4. Muodonmuutokset
MUODONMUUTOKSET Lähtöotaksumat:. Materiaali on isotrooppista ja homogeenista. Hooken laki on voimassa (fysikaalinen lineaarisuus) 3. Bernoullin hypoteesi on voimassa (tekninen taivutusteoria) 4. Muodonmuutokset
1. Olkoot vektorit a, b ja c seuraavasti määritelty: a) Määritä vektori. sekä laske sen pituus.
 Määritä vektori. sekä laske sen pituus.") Matematiikan kurssikoe, Maa4 Vektorit RATKAISUT Sievin lukio Keskiviikko 12.4.2017 VASTAA YHTEENSÄ VIITEEN TEHTÄVÄÄN! MAOL JA LASKIN/LAS- KINOHJELMAT OVAT SALLITTUJA! 1. Olkoot vektorit a, b ja c seuraavasti
Matematiikan kurssikoe, Maa4 Vektorit RATKAISUT Sievin lukio Keskiviikko 12.4.2017 VASTAA YHTEENSÄ VIITEEN TEHTÄVÄÄN! MAOL JA LASKIN/LAS- KINOHJELMAT OVAT SALLITTUJA! 1. Olkoot vektorit a, b ja c seuraavasti
DYNAMIIKKA II, LUENTO 6 (SYKSY 2015) Arttu Polojärvi
 Arttu Polojärvi") DYNAMIIKKA II, LUENTO 6 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Mekaniikan peruslait (liikelait). Liikemäärän momentin tase. Kappaleen massan vaikutusmitat. Jäykän
DYNAMIIKKA II, LUENTO 6 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Mekaniikan peruslait (liikelait). Liikemäärän momentin tase. Kappaleen massan vaikutusmitat. Jäykän
DI Risto Lilja, kommentaattori RI, DI Aarre Iivonen Tampereen ammattikorkeakoulu, valvojana Olli Saarinen
 TAMPEREEN AMMATTIKORKEAKOULU Rakennustekniikan koulutusohjelma Talonrakennustekniikka Tutkintotyö Timo Sormunen STATIIKAN PERUSKURSSIN OPPIMATERIAALI Työn ohjaaja Työn teettäjä Tampere 005 DI Risto Lilja,
TAMPEREEN AMMATTIKORKEAKOULU Rakennustekniikan koulutusohjelma Talonrakennustekniikka Tutkintotyö Timo Sormunen STATIIKAN PERUSKURSSIN OPPIMATERIAALI Työn ohjaaja Työn teettäjä Tampere 005 DI Risto Lilja,
RASITUSKUVIOT. Kuvioiden laatimisen tehostamiseksi kannattaa rasitukset poikkileikkauksissa laskea seuraavassa esitetyllä tavalla:
 RASITUSKUVIOT Suurimpien rasitusten ja niiden yhdistelmien selvittämiseksi laaditaan niin sanotut rasituskuviot, joissa esitetään kunkin rasituksen arvot kaikissa rakenteen poikkileikkauksissa. Rasituskuvioita
RASITUSKUVIOT Suurimpien rasitusten ja niiden yhdistelmien selvittämiseksi laaditaan niin sanotut rasituskuviot, joissa esitetään kunkin rasituksen arvot kaikissa rakenteen poikkileikkauksissa. Rasituskuvioita
Vektorialgebra 1/5 Sisältö ESITIEDOT: vektori
 Vektorialgebra 1/5 Sisältö Skalaaritulo Vektoreiden yhteenlaskun ja skalaarilla kertomisen lisäksi vektoreiden välille voidaan määritellä myös kertolasku. Itse asiassa näitä on kaksi erilaista. Seurauksena
Vektorialgebra 1/5 Sisältö Skalaaritulo Vektoreiden yhteenlaskun ja skalaarilla kertomisen lisäksi vektoreiden välille voidaan määritellä myös kertolasku. Itse asiassa näitä on kaksi erilaista. Seurauksena
Päähakemisto Tehtävien ratkaisut -hakemisto. Vastaus: a) 90 b) 60 c) 216 d) 1260 e) 974,03 f) ,48
 90 b) 60 c) 216 d) 1260 e) 974,03 f) ,48") Trigonometriset funktiot 169. Muutetaan asteet radiaaneiksi. 180 astetta on radiaaneina π eli 180 = π rad Tällöin 1 rad. 180 45 1 a) 45 180 4 4 65 1 b) 65 180 6 10 c) 10 180 5 5 d) 5 180 4 40 7 e) 40 180
Trigonometriset funktiot 169. Muutetaan asteet radiaaneiksi. 180 astetta on radiaaneina π eli 180 = π rad Tällöin 1 rad. 180 45 1 a) 45 180 4 4 65 1 b) 65 180 6 10 c) 10 180 5 5 d) 5 180 4 40 7 e) 40 180
TÄSSÄ ON ESIMERKKEJÄ SÄHKÖ- JA MAGNETISMIOPIN KEVÄÄN 2017 MATERIAALISTA
 TÄSSÄ ON ESMERKKEJÄ SÄHKÖ- JA MAGNETSMOPN KEVÄÄN 2017 MATERAALSTA a) Määritetään magneettikentän voimakkuus ja suunta q P = +e = 1,6022 10 19 C, v P = (1500 m s ) i, F P = (2,25 10 16 N)j q E = e = 1,6022
TÄSSÄ ON ESMERKKEJÄ SÄHKÖ- JA MAGNETSMOPN KEVÄÄN 2017 MATERAALSTA a) Määritetään magneettikentän voimakkuus ja suunta q P = +e = 1,6022 10 19 C, v P = (1500 m s ) i, F P = (2,25 10 16 N)j q E = e = 1,6022
3.1 Lineaarikuvaukset. MS-A0004/A0006 Matriisilaskenta. 3.1 Lineaarikuvaukset. 3.1 Lineaarikuvaukset
 31 MS-A0004/A0006 Matriisilaskenta 3 Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2292015 Lineaariset yhtälöt ovat vektoreille luonnollisia yhtälöitä, joita
31 MS-A0004/A0006 Matriisilaskenta 3 Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2292015 Lineaariset yhtälöt ovat vektoreille luonnollisia yhtälöitä, joita
2.3 Voiman jakaminen komponentteihin
 Seuraavissa kappaleissa tarvitaan aina silloin tällöin taitoa jakaa voima komponentteihin sekä myös taitoa suorittaa sille vastakkainen operaatio eli voimien resultantin eli kokonaisvoiman laskeminen.
Seuraavissa kappaleissa tarvitaan aina silloin tällöin taitoa jakaa voima komponentteihin sekä myös taitoa suorittaa sille vastakkainen operaatio eli voimien resultantin eli kokonaisvoiman laskeminen.
Lineaarialgebra ja matriisilaskenta I
 Lineaarialgebra ja matriisilaskenta I 13.6.2013 HY / Avoin yliopisto Jokke Häsä, 1/12 Käytännön asioita Kesäkuun tentti: ke 19.6. klo 17-20, päärakennuksen sali 1. Anna palautetta kurssisivulle ilmestyvällä
Lineaarialgebra ja matriisilaskenta I 13.6.2013 HY / Avoin yliopisto Jokke Häsä, 1/12 Käytännön asioita Kesäkuun tentti: ke 19.6. klo 17-20, päärakennuksen sali 1. Anna palautetta kurssisivulle ilmestyvällä
Insinöörimatematiikka D
 Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
ELEMENTTIMENETELMÄN PERUSTEET SESSIO 07: Aksiaalinen sauvaelementti, osa 2.
 7/ EEMENTTIMENETEMÄN PERSTEET SESSIO 7: Aksiaalinen sauvaelementti, osa. RATKAIS EEMENTIN AEESSA Verkon perusyhtälöstä [ K ]{ } = { F} saatavasta solmusiirtymävektorista { } voidaan poimia minkä tahansa
7/ EEMENTTIMENETEMÄN PERSTEET SESSIO 7: Aksiaalinen sauvaelementti, osa. RATKAIS EEMENTIN AEESSA Verkon perusyhtälöstä [ K ]{ } = { F} saatavasta solmusiirtymävektorista { } voidaan poimia minkä tahansa
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 3: Vektorikentät
 MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 3: Vektorikentät Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 2016 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2016
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 3: Vektorikentät Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 2016 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2016
Voiman momentti M. Liikemäärä, momentti, painopiste. Momentin määritelmä. Laajennettu tasapainon käsite. Osa 4
 Osa 4 Liikemäärä, momentti, painopiste Voiman momentti M Voiman vääntövaikutusta mittaava suure on momentti. Esim. automerkkien esitteissä on mainittu moottorin momentti ("vääntö"). Moottorin antama voima
Osa 4 Liikemäärä, momentti, painopiste Voiman momentti M Voiman vääntövaikutusta mittaava suure on momentti. Esim. automerkkien esitteissä on mainittu moottorin momentti ("vääntö"). Moottorin antama voima
MEI Kontinuumimekaniikka
 MEI-55300 Kontinuumimekaniikka 1 MEI-55300 Kontinuumimekaniikka 6. harjoitus jännitysmitat Ratkaisut T 1: Ohuen suoran sauvan pituus referenssitilassa on 0 ja poikkipinta-ala on A 0. Sauvan akselin suuntaisen
MEI-55300 Kontinuumimekaniikka 1 MEI-55300 Kontinuumimekaniikka 6. harjoitus jännitysmitat Ratkaisut T 1: Ohuen suoran sauvan pituus referenssitilassa on 0 ja poikkipinta-ala on A 0. Sauvan akselin suuntaisen
3 Suorat ja tasot. 3.1 Suora. Tässä luvussa käsitellään avaruuksien R 2 ja R 3 suoria ja tasoja vektoreiden näkökulmasta.
 3 Suorat ja tasot Tässä luvussa käsitellään avaruuksien R 2 ja R 3 suoria ja tasoja vektoreiden näkökulmasta. 3.1 Suora Havaitsimme skalaarikertolaskun tulkinnan yhteydessä, että jos on mikä tahansa nollasta
3 Suorat ja tasot Tässä luvussa käsitellään avaruuksien R 2 ja R 3 suoria ja tasoja vektoreiden näkökulmasta. 3.1 Suora Havaitsimme skalaarikertolaskun tulkinnan yhteydessä, että jos on mikä tahansa nollasta
3 Yhtälöryhmä ja pistetulo
 Juuri 4 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 5..06 Yhtälöryhmä ja pistetulo Ennakkotehtävät. z = x y, x y + z = 6 ja 4x + y + z = Sijoitetaan z = x y muihin yhtälöihin. x y + x y =
Juuri 4 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 5..06 Yhtälöryhmä ja pistetulo Ennakkotehtävät. z = x y, x y + z = 6 ja 4x + y + z = Sijoitetaan z = x y muihin yhtälöihin. x y + x y =
Tekijä Pitkä matematiikka
 Tekijä Pitkä matematiikka 5..017 110 Valitaan suoralta kaksi pistettä ja piirretään apukolmio, josta koordinaattien muutokset voidaan lukea. Vaakasuoran suoran kulmakerroin on nolla. y Suoran a kulmakerroin
Tekijä Pitkä matematiikka 5..017 110 Valitaan suoralta kaksi pistettä ja piirretään apukolmio, josta koordinaattien muutokset voidaan lukea. Vaakasuoran suoran kulmakerroin on nolla. y Suoran a kulmakerroin