KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
|
|
|
- Hannu-Pekka Parviainen
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
1 KJR-C1001 Statiikka ja dynamiikka Luento Susanna Hurme
 Osaamistavoitteet Osata analysoida jäykän kappaleen pyörimisliikettä kiinteän akselin ympäri Ymmärtää käsitteet: kulmanopeus ja kulmakiihtyvyys")

2 Päivän aihe: Rotaatioliikkeen kinematiikka: kulmanopeus ja -kiihtyvyys (Kirjan luvut 12.7, 16.3) Osaamistavoitteet Osata analysoida jäykän kappaleen pyörimisliikettä kiinteän akselin ympäri Ymmärtää käsitteet: kulmanopeus ja kulmakiihtyvyys sekä osata esittää ne skalaari- ja vektorimuodossa Osata analysoida pisteen ympyräliikettä Sisältö Määritellään, mitä on pyörimisliike Määritellään kulmanopeus ja kulmakiihtyvyys Tarkastellaan pisteen liikettä jäykän kappaleen rotaatioliikkeessä Kinematiikan yhtälöiden esittäminen normaali- ja tangentiaalikoordinaatistossa Sovellusesimerkkejä

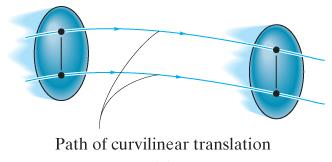
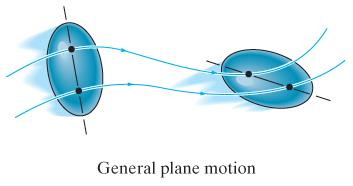
3 Jäykän kappaleen tasoliike
4 Kulmanopeus ja -kiihtyvyys Tarkastellaan pyörivän kappaleen pisteen P liikettä. Piste P liikkuu ympyräradalla kappaleen pyörimisakselin ympäri. Pisteen P kulma-asema ilmoitetaan kulman θ avulla. Kulman muutos, dθ, on pisteen P kulma-aseman muutos. Kulma-aseman muutosnopeus eli muutos ajan suhteen on kulmanopeus, ω. ω = dθ [ω] = rad s
5 Kulmanopeus ja -kiihtyvyys Kulmanopeuden muutos ajan suhteen on kulmakiihtyvyys, α. α = dω α = d2 θ 2 Koska ω = ω(θ) ja θ = θ(t), niin ω = ω(θ(t)). Yhdistetyn funktion derivaatasta α = dω = dω dθ dθ = dω dθ ω αdθ = ωdω Johdettiin yhtälö, joka yhdistää kulmakiihtyvyyden, kulmaaseman ja kulmanopeuden. Koska kappale on jäykkä, kaikilla kappaleen pisteillä on sama kulmanopeus ja kiihtyvyys. Siten koko kappaleella on sama kulmanopeus ja kiihtyvyys (lukuunottamatta pisteitä, jotka sijaitsevat pyörimisakselilla).
 θ = 1 rad. Tehtävässä tunnetaan kulmanopeus ja halutaan ratkaista aika tietyn nopeuden saavuttamiseen.")
6 Esimerkki Vauhtipyörä pyörii kulmanopeudella ω = (4θ 1/2 ) rad/s, missä θ = rad. Määritä, kuinka pitkä aika kuluu kulmanopeuden ω = 150 rad/s saavuttamiseen. Olkoon kulmaasema alussa (t = 0) θ = 1 rad. Tehtävässä tunnetaan kulmanopeus ja halutaan ratkaista aika tietyn nopeuden saavuttamiseen. Ratkaisu saadaan kulmanopeuden yhtälöllä: Järjestellään termit ja integroidaan. = 1 ω dθ 0 t = 1 θ 1 ω dθ ω = dθ t = 1 θ 1 4 θ dθ θ = 1 2 θ 1 = 1 2 θ 1 2 Voimme ratkaista kulma-aseman lopussa, kun tunnemme kulmanopeuden lopussa. ω = 4 θ = 150 θ = (150/4) 2 = rad t = = (s)
7 Käyräviivainen liike: Normaali- ja tangentiaalikomponentit (Kirjan luku 12.7) Partikkelin asema on kaaren pituus s, mitattuna kiinteästä pisteestä O. Partikkeli liikkuu tunnetulla käyräviivaisella reitillä. Määritellään (n,t)-koordinaatisto, joka liikkuu partikkelin mukana, origo partikkelissa. t-akseli on käyrän tangentin suuntainen ja sen positiivinen suunta, jota merkitään yksikkövektorilla u t, on kasvavan etäisyyden s suuntaan. n-akseli on kaarevuussäteen suuntainen ja tangenttia vastaan kohtisuorassa. Sen positiivinen suunta, jota merkitään yksikkövektorilla u n, on aina käyrän koveralle puolelle.
8 Pisteen liike ympyräradalla Pisteen P kulma-asema voidaan ilmoittaa kulman θ avulla. Pisteen P asema ympyräradallaan voidaan ilmoittaa rata-aseman s avulla. s = rθ Derivoimalla puolittain ajan suhteen saadaan nopeuden ja kulmanopeuden yhteys. s θ dθ ds = r dθ v = rω Nopeusvektori on aina liikeradan tangentin suuntainen: v = vu t

9 Pisteen liike ympyräradalla Nopeuden ja kulmanopeuden yhteys voidaan ilmoittaa myös vektorimuodossa ristitulon avulla v = ω r P Missä r P on etäisyys pyörimisakselilta pisteeseen P. v = ωr P sinφ = ωr = ω r
10 Pisteen liike ympyräradalla Pisteen P kiihtyvyys on nopeuden aikaderivaatta. a = v v = vu t Nopeudella on suuruus ja suunta, jotka molemmat muuttuvat ajan funktiona, kun piste liikkuu ympyräradalla. Nopeuden aikaderivaatta on tulon derivoimissäännön mukaan Dfg = fdg + gdf v = vu t + v u t Tangentin suuntaisen yksikkövektorin aikaderivaatta, u t, on u t = v r u n Kiihtyvyys on (Todistus kirjassa, luku 12.7, sekä seuraavalla kalvolla) Kiihtyvyyden komponentit Kiihtyvyyden suuruus a = vu t + v2 r u n = a t u t + a n u n a t = v a n = v2 r a = a t 2 + a n 2
11 *) Ei käyty luennolla Käyräviivainen liike: Normaali- ja tangentiaalikomponentit. Miksi u t = v r u n? Katso myös kirjan luku 12.7 Partikkeli liikkuu matkan ds ajassa. Tangentin suuntaisen yksikkövektorin suunta muuttuu, ja on ajan jälkeen u t. Kaaren pituutta ds vastaa infinitesimaalinen kulman muutos dθ. Yksikkövektori u t siis kiertyy kulman dθ verran ja sen suunta ajan jälkeen on u t. Yksikkövektorin muutosta kuvaa vektori du t. Vektorien summasta saadaan u t = u t + du t Vektorin du t pituus on dθ ja sen suunta ajan jälkeen on u n. du t = dθ du t = dθu n Siten du t = dθ u n = ωu n = v r u n
 = dω r P + ω dr P Tulon derivaatta!")
12 Pisteen liike ympyräradalla Pisteen kiihtyvyys voidaan ilmoittaa myös vektorimuodossa ristitulon avulla. Muistetaan nopeuden ja kulmanopeuden yhteys Siten kiihtyvyys on v = ω r P a = dv = d (ω r P) = dω r P + ω dr P Tulon derivaatta! Tarkastellaan ristitulotermejä = α = v = ω r P α r P = αr P sinφu t = αru t = α r = α r P + ω (ω r P ) = α r ω 2 r = a t + a n ω r P = ωr p sinφu t = (ωru t ) ω ω r P = ωr ω u t = ωr ωu n = ω 2 ru n = ω 2 r
13 Pisteen liike ympyräradalla Kiihtyvyyden komponentit voidaan kirjoittaa kulmanopeuden ja kiihtyvyyden avulla yhdistämällä yhtälöt. a t = v a n = v2 r v = rω α = dω Kiihtyvyyden tangentin suuntainen komponentti a t = dv = r dω = rα a t = rα Kiihtyvyyden normaalin suuntainen komponentti a n = v2 r = (rω) 2 r = ω 2 r a n = ω 2 r Kiihtyvyysvektori on siten: a = a t + a n = a t u t + a n u n = rαu t + ω 2 ru n = r α ω 2 r (kuten edellä)
14 Yhteenveto Pyörimisliikkeen yhtälöt Kulmaliikettä kuvaavat yhtälöt. Perusyhtälöt Kulmanopeus ω = dθ Kulmakiihtyvyys α = dω Perusyhtälöistä johdettu kulmakiihtyvyyden, -aseman ja kulmanopeuden yhteys Pisteen P liikettä ympyräradalla kuvaavat yhtälöt. Nopeus v = rω Tangentin suuntainen kiihtyvyys a t = rα Normaalin suuntainen kiihtyvyys a n = ω 2 r αdθ = ωdω

15 Esimerkki Pyörän kulma-asema on θ = 0.5t t rad, missä t = s. Määritä ämpärin nopeus ja kiihtyvyys ajanhetkellä t = 3s. P Pyörän kehällä olevan pisteen P nopeus ja tangentin suuntainen kiihtyvyys ovat yhtä suuret kuin köyden ja ämpärin nopeus ja kiihtyvyys. Ratkaistaan siis pisteen P nopeus ja tangentin suuntainen kiihtyvyys ajanhetkellä t = 3s. Ensin ratkaistaan kulmanopeus ja kulmakiihtyvyys kulma-aseman yhtälöstä. ω = dθ = d 0.5t3 + 15t = 1.5t (rad/s) α = dω = d 1.5t = 3t (rad/s 2 ) Pisteen nopeus ja kiihtyvyys ympyräradalla saadaan kulmanopeuden ja kiihtyvyyden avulla. v = rω: v(t = 3s) = 0.2m rad/s = 5.7 m/s a t = rα: = 1.8 m/s 2 a(t = 3s) = 0.2m 3 3 rad/s 2

 t = (a A ) t ω B r B = ω C r C α B r B")
16 Pyörimisliikkeen sovellus - hammasrattaat Hammasrattaiden kontaktipisteiden nopeus ja tangentin suuntainen kiihtyvyys ovat samat. v A = v A (a A ) t = (a A ) t ω B r B = ω C r C α B r B = α C r C (a A ) n (a A ) n a A a A
17 Esimerkki Moottori pyörittää ratasta A hetkellisesti vakiokulmakiihtyvyydellä α A = 4.5 rad/s 2. Alussa ratas on levossa. Määritä sylinterin C nopeus ja matka, jonka se kulkee kolmessa sekunnissa. Köysi on kierretty väkipyörän D ympärille, joka on kiinnitetty rattaaseen B. Sylinterin C nopeus ja sen kulkema matka ovat yhtä suuria kuin pisteen P nopeus ja sen kulkema matka väkipyörän D kehällä. Määritetään ensin väkipyörän D kulmakiihtyvyys ja - nopeus, joista saadaan ratkaistua kysytyt suureet. Hammasrattaat A ja B koskettavat toisiaan pisteessä P. Siten niiden kulmakiihtyvyyksien välillä on yhteys: α A r A = α B r B α B = α Ar A r B = 4.5rad/s2 (75mm) 225mm = 1.5rad/s 2 Rattaan B kulmanopeus ajanhetkellä t = 3s : α = dω α = dω = 0 ω Bdω ωb = 4.5 ( rad s ) Sylinterin C nopeus ajanhetkellä t = 3s (= pisteen P nopeus): v = rω B = (125mm)4.5 rad = m s s
18 Esimerkki Moottori pyörittää ratasta A hetkellisesti vakiokulmakiihtyvyydellä α A = 4.5 rad/s 2. Alussa ratas on levossa. Määritä sylinterin C nopeus ja matka, jonka se kulkee kolmessa sekunnissa. Köysi on kierretty väkipyörän D ympärille, joka on kiinnitetty rattaaseen B. Ratkaistaan hammasrattaan B ja väkipyörän D kulma-asema ajanhetkellä t = 3s integroimalla kulmanopeuden yhtälöstä ω = dθ Ensin pitää lausua kulmanopeus ajan funktiona α = dω α = dω 0 t 1.5 = 0 ω dω ω = 1.5t ( rad s ) Integroidaan kulmanopeuden yhtälö ω = dθ t = 0 θ dθ θ = = 6.75 (rad) Sylinterin kulkema matka saadaan yhtälöstä: s = rθ s C = r D θ = 125mm 6.75rad = 844 mm
19 Yhteenveto Tarkastelimme jäykän kappaleen rotaation kinematiikkaa Määrittelimme kinematiikan suureet: Kulma-asema Kulmanopeus Kulmakiihtyvyys ω = dθ α = dω Tarkastelimme pisteen liikettä ympyräradalla ja johdimme yhteydet pisteen liikkeen ja kulmaliikkeen välille ω ω α α v = rω a t = rα a n = ω 2 r v = ω r a = α r ω 2 r = a t + a n Sovelsimme tuloksia hammasrattaiden liikkeen laskemiseen.
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 29.3.2016 Susanna Hurme Yleisen tasoliikkeen kinematiikka: absoluuttinen ja suhteellinen liike, rajoitettu liike (Kirjan luvut 16.4-16.7) Osaamistavoitteet Ymmärtää,
KJR-C1001 Statiikka ja dynamiikka Luento 29.3.2016 Susanna Hurme Yleisen tasoliikkeen kinematiikka: absoluuttinen ja suhteellinen liike, rajoitettu liike (Kirjan luvut 16.4-16.7) Osaamistavoitteet Ymmärtää,
Luento 5: Käyräviivainen liike. Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat θ, ω ja α Yhdistetty liike
 Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat θ, ω ja α Yhdistetty liike 1 / 29 Luennon sisältö Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat
Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat θ, ω ja α Yhdistetty liike 1 / 29 Luennon sisältö Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 31.3.2016 Susanna Hurme Dynamiikan välikoe 4.4.2016 Ajankohta ma 4.4.2016 klo 16:30 19:30 Salijako Aalto-Sali: A-P (sukunimen alkukirjaimen mukaan) Ilmoittautuminen
KJR-C1001 Statiikka ja dynamiikka Luento 31.3.2016 Susanna Hurme Dynamiikan välikoe 4.4.2016 Ajankohta ma 4.4.2016 klo 16:30 19:30 Salijako Aalto-Sali: A-P (sukunimen alkukirjaimen mukaan) Ilmoittautuminen
Luento 3: Käyräviivainen liike
 Luento 3: Käyräviivainen liike Kertausta viime viikolta Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat θ, ω ja α Yhdistetty liike Luennon sisältö Kertausta viime viikolta Käyräviivainen liike
Luento 3: Käyräviivainen liike Kertausta viime viikolta Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat θ, ω ja α Yhdistetty liike Luennon sisältö Kertausta viime viikolta Käyräviivainen liike
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 23.3.2016 Susanna Hurme Rotaatioliikkeen kinetiikka: hitausmomentti ja liikeyhtälöt (Kirjan luvut 17.1, 17.2 ja 17.4) Osaamistavoitteet Ymmärtää hitausmomentin
KJR-C1001 Statiikka ja dynamiikka Luento 23.3.2016 Susanna Hurme Rotaatioliikkeen kinetiikka: hitausmomentti ja liikeyhtälöt (Kirjan luvut 17.1, 17.2 ja 17.4) Osaamistavoitteet Ymmärtää hitausmomentin
Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia
 Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa 1 / 31 Luennon sisältö Suhteellinen translaatioliike
Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa 1 / 31 Luennon sisältö Suhteellinen translaatioliike
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 30.3.2016 Susanna Hurme Yleisen tasoliikkeen kinetiikka (Kirjan luku 17.5) Osaamistavoitteet Osata ratkaista voimia ja niiden aiheuttamia kiihtyvyyksiä tasoliikkeessä
KJR-C1001 Statiikka ja dynamiikka Luento 30.3.2016 Susanna Hurme Yleisen tasoliikkeen kinetiikka (Kirjan luku 17.5) Osaamistavoitteet Osata ratkaista voimia ja niiden aiheuttamia kiihtyvyyksiä tasoliikkeessä
Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia
 Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Pyörimisliikkeestä Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia Luennon sisältö Suhteellinen translaatioliike
Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Pyörimisliikkeestä Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia Luennon sisältö Suhteellinen translaatioliike
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 24.3.2016 Susanna Hurme Rotaatioliikkeen liike-energia, teho ja energiaperiaate (Kirjan luku 18) Osaamistavoitteet Ymmärtää, miten liike-energia määritetään kiinteän
KJR-C1001 Statiikka ja dynamiikka Luento 24.3.2016 Susanna Hurme Rotaatioliikkeen liike-energia, teho ja energiaperiaate (Kirjan luku 18) Osaamistavoitteet Ymmärtää, miten liike-energia määritetään kiinteän
Jakso 1: Pyörimisliikkeen kinematiikkaa, hitausmomentti
 Jakso 1: Pyörimisliikkeen kinematiikkaa, hitausmomentti Kertausta Ympyrärataa kiertävälle kappaleelle on määritelty käsitteet kulmanopeus ja kulmakiihtyvyys seuraavasti: ω = dθ dt dω ja α = dt Eli esimerkiksi
Jakso 1: Pyörimisliikkeen kinematiikkaa, hitausmomentti Kertausta Ympyrärataa kiertävälle kappaleelle on määritelty käsitteet kulmanopeus ja kulmakiihtyvyys seuraavasti: ω = dθ dt dω ja α = dt Eli esimerkiksi
Luento 3: Käyräviivainen liike
 Luento 3: Käyräviivainen liike Kertausta viime viikolta Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat,! ja Yhdistetty liike 2015-09-14 13:50:32 1/40 luentokalvot_03_combined.pdf (#36) Luennon
Luento 3: Käyräviivainen liike Kertausta viime viikolta Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat,! ja Yhdistetty liike 2015-09-14 13:50:32 1/40 luentokalvot_03_combined.pdf (#36) Luennon
Luento 5: Käyräviivainen liike
 Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat,! ja Yhdistetty liike Ajankohtaista Konseptitesti 1 Kysymys Viereisessä kuvassa leppäkerttu istuu karusellissa,
Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat,! ja Yhdistetty liike Ajankohtaista Konseptitesti 1 Kysymys Viereisessä kuvassa leppäkerttu istuu karusellissa,
Luento 5: Käyräviivainen liike
 Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat,! ja Yhdistetty liike Ajankohtaista Konseptitesti 1 http://presemo.aalto.fi/mekaniikka2017 Kysymys Sotalaivasta
Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat,! ja Yhdistetty liike Ajankohtaista Konseptitesti 1 http://presemo.aalto.fi/mekaniikka2017 Kysymys Sotalaivasta
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys10 Syksy 009 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
Mekaniikan jatkokurssi Fys10 Syksy 009 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys10 Kevät 010 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
Mekaniikan jatkokurssi Fys10 Kevät 010 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
Derivoimalla kerran saadaan nopeus ja toisen kerran saadaan kiihtyvyys Ña r
 Vuka HT 4 Tehtävä. Lyhyenä alustuksena tehtävään johdetaan keskeiskiihtyvyys tasaisessa pyörimisessä. Meillä on ympyräradalla liikkuva kappale joka pyörii vakiokulmanopeudella ω dϕ säteellä r origosta.
Vuka HT 4 Tehtävä. Lyhyenä alustuksena tehtävään johdetaan keskeiskiihtyvyys tasaisessa pyörimisessä. Meillä on ympyräradalla liikkuva kappale joka pyörii vakiokulmanopeudella ω dϕ säteellä r origosta.
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 16.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinetiikka (Kirjan luvut 12.6, 13.1-13.3 ja 17.3) Oppimistavoitteet Ymmärtää, miten Newtonin toisen lain
KJR-C1001 Statiikka ja dynamiikka Luento 16.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinetiikka (Kirjan luvut 12.6, 13.1-13.3 ja 17.3) Oppimistavoitteet Ymmärtää, miten Newtonin toisen lain
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 17.3.2016 Susanna Hurme Päivän aihe: Energian, työn ja tehon käsitteet sekä energiaperiaate (Kirjan luku 14) Osaamistavoitteet: Osata tarkastella partikkelin kinetiikkaa
KJR-C1001 Statiikka ja dynamiikka Luento 17.3.2016 Susanna Hurme Päivän aihe: Energian, työn ja tehon käsitteet sekä energiaperiaate (Kirjan luku 14) Osaamistavoitteet: Osata tarkastella partikkelin kinetiikkaa
Fysiikka ei kerro lopullisia totuuksia. Jokin uusi havainto voi vaatia muuttamaan teorioita.
 766323A Mekaniikka Mansfield and O Sullivan: Understanding physics kpl 1 ja 2. Näitä löytyy myös Young and Freedman: University physics -teoksen luvuissa 2 ja 3, s. 40-118. Johdanto Fysiikka on perustiede.
766323A Mekaniikka Mansfield and O Sullivan: Understanding physics kpl 1 ja 2. Näitä löytyy myös Young and Freedman: University physics -teoksen luvuissa 2 ja 3, s. 40-118. Johdanto Fysiikka on perustiede.
Kinematiikka -1- K09A,B&C Harjoitustehtäviä Kevät 2010 PARTIKKELI. Suoraviivainen liike
 Kinematiikka -1- K09A,B&C Harjoitustehtäviä Kevät 010 PARTIKKELI Suoraviivainen liike 1. Suoraviivaisessa liikkeessä olevan partikkelin asema on (järjestelmä m, s) 3 x ( = t 15t + 36t 10. Laske a) partikkelin
Kinematiikka -1- K09A,B&C Harjoitustehtäviä Kevät 010 PARTIKKELI Suoraviivainen liike 1. Suoraviivaisessa liikkeessä olevan partikkelin asema on (järjestelmä m, s) 3 x ( = t 15t + 36t 10. Laske a) partikkelin
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 24.2.2016 Susanna Hurme Päivän aihe: Voiman momentin käsite (Kirjan luvut 4.1-4.6) Mikä on voiman momentti? Määritetään momentti skalaari- ja vektorimuodossa Opitaan
KJR-C1001 Statiikka ja dynamiikka Luento 24.2.2016 Susanna Hurme Päivän aihe: Voiman momentin käsite (Kirjan luvut 4.1-4.6) Mikä on voiman momentti? Määritetään momentti skalaari- ja vektorimuodossa Opitaan
Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia
 Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Pyörimisliikkeestä Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa Konseptitesti 1 Kysymys
Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Pyörimisliikkeestä Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa Konseptitesti 1 Kysymys
Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia
 Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa Ajankohtaista FuksiProffaBuffa Järjestetään
Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa Ajankohtaista FuksiProffaBuffa Järjestetään
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 23.2.2016 Susanna Hurme Tervetuloa kurssille! Mitä on statiikka? Mitä on dynamiikka? Miksi niitä opiskellaan? Päivän aihe: Voiman käsite ja partikkelin tasapaino
KJR-C1001 Statiikka ja dynamiikka Luento 23.2.2016 Susanna Hurme Tervetuloa kurssille! Mitä on statiikka? Mitä on dynamiikka? Miksi niitä opiskellaan? Päivän aihe: Voiman käsite ja partikkelin tasapaino
DYNAMIIKKA II, LUENTO 2 (SYKSY 2015) Arttu Polojärvi
 Arttu Polojärvi") DYNAMIIKKA II, LUENTO 2 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertaus edelliseltä luennolta sekä ristituloista. Mekaniikan koordinaatistot: pallokoordinaatisto. Vakiovektorin muutosnopeus (kantavektorin
DYNAMIIKKA II, LUENTO 2 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertaus edelliseltä luennolta sekä ristituloista. Mekaniikan koordinaatistot: pallokoordinaatisto. Vakiovektorin muutosnopeus (kantavektorin
Luento 7: Pyörimisliikkeen dynamiikkaa
 Luento 7: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Laskettuja esimerkkejä Luennon sisältö Johdanto Vääntömomentti Hitausmomentti
Luento 7: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Laskettuja esimerkkejä Luennon sisältö Johdanto Vääntömomentti Hitausmomentti
Luento 7: Pyörimisliikkeen dynamiikkaa
 Luento 7: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Harjoituksia ja laskettuja esimerkkejä 1 / 37 Luennon sisältö Johdanto
Luento 7: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Harjoituksia ja laskettuja esimerkkejä 1 / 37 Luennon sisältö Johdanto
4 Kaksi- ja kolmiulotteinen liike
 Mansfield and O Sullivan: Understandin physics, painos 1999, kpl 4. Näitä löytyy myös Youn and Freedman: University physics -teoksen luvuissa 4, osin myös luvuissa 3 ja 5. 4 Kaksi- ja kolmiulotteinen liike
Mansfield and O Sullivan: Understandin physics, painos 1999, kpl 4. Näitä löytyy myös Youn and Freedman: University physics -teoksen luvuissa 4, osin myös luvuissa 3 ja 5. 4 Kaksi- ja kolmiulotteinen liike
Mekaniikka, osa 2. Perttu Lantto. Luentokalvot
 Mekaniikka, osa 2 Perttu Lantto Luentokalvot perustuvat kirjaan: University physics, 13 th International Edition H. D. Young & R. A. Freedman (Pearson, 2012) 16. tammikuuta 2017 Mekaniikka, osa 2 Mekaniikka
Mekaniikka, osa 2 Perttu Lantto Luentokalvot perustuvat kirjaan: University physics, 13 th International Edition H. D. Young & R. A. Freedman (Pearson, 2012) 16. tammikuuta 2017 Mekaniikka, osa 2 Mekaniikka
Ei-inertiaaliset koordinaatistot
 orstai 25.9.2014 1/17 Ei-inertiaaliset koordinaatistot Tarkastellaan seuraavaa koordinaatistomuunnosta: {x} = (x 1, x 2, x 3 ) {y} = (y 1, y 2, y 3 ) joille valitaan kantavektorit: {x} : (î, ĵ, ˆk) {y}
orstai 25.9.2014 1/17 Ei-inertiaaliset koordinaatistot Tarkastellaan seuraavaa koordinaatistomuunnosta: {x} = (x 1, x 2, x 3 ) {y} = (y 1, y 2, y 3 ) joille valitaan kantavektorit: {x} : (î, ĵ, ˆk) {y}
DYNAMIIKKA II, LUENTO 4 (SYKSY 2015) Arttu Polojärvi
 Arttu Polojärvi") DYNAMIIKKA II, LUENTO 4 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta: jäykkä kappale, kulma-asema, Eulerin kulmat, kulmanopeus. Suhteellinen liike: Vektorin muutosnopeudet eri koordinaatistoissa.
DYNAMIIKKA II, LUENTO 4 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta: jäykkä kappale, kulma-asema, Eulerin kulmat, kulmanopeus. Suhteellinen liike: Vektorin muutosnopeudet eri koordinaatistoissa.
DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi
 Arttu Polojärvi") DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Suhteellisen liikkeen nopeuden ja kiihtyvyyden yhtälöt. Jäykän kappaleen partikkelin liike. Jäykän
DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Suhteellisen liikkeen nopeuden ja kiihtyvyyden yhtälöt. Jäykän kappaleen partikkelin liike. Jäykän
Nopeus, kiihtyvyys ja liikemäärä Vektorit
 Nopeus, kiihtyvyys ja liikemäärä Vektorit Luento 2 https://geom.mathstat.helsinki.fi/moodle/course/view.php?id=360 Luennon tavoitteet: Vektorit tutuiksi Koordinaatiston valinta Vauhdin ja nopeuden ero
Nopeus, kiihtyvyys ja liikemäärä Vektorit Luento 2 https://geom.mathstat.helsinki.fi/moodle/course/view.php?id=360 Luennon tavoitteet: Vektorit tutuiksi Koordinaatiston valinta Vauhdin ja nopeuden ero
4. Käyrän lokaaleja ominaisuuksia
 23 VEKTORIANALYYSI Luento 3 4 Käyrän lokaaleja ominaisuuksia Käyrän tangentti Tarkastellaan parametrisoitua käyrää r( t ) Parametrilla t ei tarvitse olla mitään fysikaalista merkitystä, mutta seuraavassa
23 VEKTORIANALYYSI Luento 3 4 Käyrän lokaaleja ominaisuuksia Käyrän tangentti Tarkastellaan parametrisoitua käyrää r( t ) Parametrilla t ei tarvitse olla mitään fysikaalista merkitystä, mutta seuraavassa
Luento 10: Työ, energia ja teho. Johdanto Työ ja kineettinen energia Teho
 Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho 1 / 23 Luennon sisältö Johdanto Työ ja kineettinen energia Teho 2 / 23 Johdanto Energia suure, joka voidaan muuttaa muodosta toiseen,
Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho 1 / 23 Luennon sisältö Johdanto Työ ja kineettinen energia Teho 2 / 23 Johdanto Energia suure, joka voidaan muuttaa muodosta toiseen,
Luento 9: Pyörimisliikkeen dynamiikkaa
 Luento 9: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Harjoituksia ja laskettuja esimerkkejä ELEC-A3110 Mekaniikka (5 op) Sami
Luento 9: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Harjoituksia ja laskettuja esimerkkejä ELEC-A3110 Mekaniikka (5 op) Sami
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 4: Taso- ja avaruuskäyrät
 MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 4: Taso- ja avaruuskäyrät Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2015 1 / 24 Motivaatio Tässä tutustutaan
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 4: Taso- ja avaruuskäyrät Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2015 1 / 24 Motivaatio Tässä tutustutaan
(a) Potentiaali ja virtafunktiot saadaan suoraan summaamalla lähteen ja pyörteen funktiot. Potentiaalifunktioksi
 Potentiaali ja virtafunktiot saadaan suoraan summaamalla lähteen ja pyörteen funktiot. Potentiaalifunktioksi") Tehtävä 1 Tornadon virtauskenttää voidaan approksimoida kaksiulotteisen nielun ja pyörteen summana Oleta, että nielun voimakkuus on m < ja pyörteen voimakkuus on > (a Määritä tornadon potentiaali- ja virtafunktiot
Tehtävä 1 Tornadon virtauskenttää voidaan approksimoida kaksiulotteisen nielun ja pyörteen summana Oleta, että nielun voimakkuus on m < ja pyörteen voimakkuus on > (a Määritä tornadon potentiaali- ja virtafunktiot
ELEC-A3110 Mekaniikka (5 op)
") ELEC-A3110 Mekaniikka (5 op) Yliopistonlehtori, tkt Sami Kujala Mikro- ja nanotekniikan laitos Syksy 2016 1 / 21 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia
ELEC-A3110 Mekaniikka (5 op) Yliopistonlehtori, tkt Sami Kujala Mikro- ja nanotekniikan laitos Syksy 2016 1 / 21 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 10.3.2016 Susanna Hurme Statiikan välikoe 14.3.2016 Ajankohta ma 14.3.2016 klo 14:15 17:15 Salijako Aalto-Sali: A-Q (sukunimen alkukirjaimen mukaan) Ilmoittautuminen
KJR-C1001 Statiikka ja dynamiikka Luento 10.3.2016 Susanna Hurme Statiikan välikoe 14.3.2016 Ajankohta ma 14.3.2016 klo 14:15 17:15 Salijako Aalto-Sali: A-Q (sukunimen alkukirjaimen mukaan) Ilmoittautuminen
766323A Mekaniikka, osa 2, kl 2015 Harjoitus 4
 766323A Mekaniikka, osa 2, kl 2015 Harjoitus 4 0. MUISTA: Tenttitehtävä tulevassa päätekokeessa: Fysiikan säilymislait ja symmetria. (Tästä tehtävästä voi saada tentissä kolme ylimääräistä pistettä. Nämä
766323A Mekaniikka, osa 2, kl 2015 Harjoitus 4 0. MUISTA: Tenttitehtävä tulevassa päätekokeessa: Fysiikan säilymislait ja symmetria. (Tästä tehtävästä voi saada tentissä kolme ylimääräistä pistettä. Nämä
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 25.2.2016 Susanna Hurme Päivän aihe: Voimasysteemien samanarvoisuus ja jakaantuneen voiman käsite (Kirjan luvut 4.7-4.9) Osaamistavoitteet: 1. Ymmärtää, mikä on
KJR-C1001 Statiikka ja dynamiikka Luento 25.2.2016 Susanna Hurme Päivän aihe: Voimasysteemien samanarvoisuus ja jakaantuneen voiman käsite (Kirjan luvut 4.7-4.9) Osaamistavoitteet: 1. Ymmärtää, mikä on
kertausta Esimerkki I
 tavoitteet kertausta osaat määrittää jäykän kappaleen hitausmomentin laskennallisesti ymmärrät kuinka vierimisessä eteneminen ja pyöriminen kytekytyvät osaat soveltaa energiaperiaatetta vierimisongelmiin
tavoitteet kertausta osaat määrittää jäykän kappaleen hitausmomentin laskennallisesti ymmärrät kuinka vierimisessä eteneminen ja pyöriminen kytekytyvät osaat soveltaa energiaperiaatetta vierimisongelmiin
BM20A5800 Funktiot, lineaarialgebra ja vektorit Harjoitus 4, Syksy 2016
 BM20A5800 Funktiot, lineaarialgebra ja vektorit Harjoitus 4, Syksy 2016 1. Hahmottele karkeasti funktion f : R R 2 piirtämällä sen arvoja muutamilla eri muuttujan arvoilla kaksiulotteiseen koordinaatistoon
BM20A5800 Funktiot, lineaarialgebra ja vektorit Harjoitus 4, Syksy 2016 1. Hahmottele karkeasti funktion f : R R 2 piirtämällä sen arvoja muutamilla eri muuttujan arvoilla kaksiulotteiseen koordinaatistoon
5.9 Voiman momentti (moment of force, torque)
") 5.9 Voiman momentti (moment of force, torque) Voiman momentti määritellään ristitulona M = r F missä r on voiman F vaikutuspisteen paikkavektori tarkasteltavan pisteen suhteen Usean voiman tapauksessa
5.9 Voiman momentti (moment of force, torque) Voiman momentti määritellään ristitulona M = r F missä r on voiman F vaikutuspisteen paikkavektori tarkasteltavan pisteen suhteen Usean voiman tapauksessa
KALTEVA TASO. 1. Työn tavoitteet. 2. Teoria
 Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1. Työn tavoitteet Tämän työn ensimmäisessä osassa tutkit kuulan, sylinterin ja sylinterirenkaan vierimistä pitkin kaltevaa tasoa.
Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1. Työn tavoitteet Tämän työn ensimmäisessä osassa tutkit kuulan, sylinterin ja sylinterirenkaan vierimistä pitkin kaltevaa tasoa.
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys102 Kevät 2010 Jukka Maalampi LUENTO 2-3 Vääntömomentti Oletus: Voimat tasossa, joka on kohtisuorassa pyörimisakselia vastaan. Oven kääntämiseen tarvitaan eri suuruinen voima
Mekaniikan jatkokurssi Fys102 Kevät 2010 Jukka Maalampi LUENTO 2-3 Vääntömomentti Oletus: Voimat tasossa, joka on kohtisuorassa pyörimisakselia vastaan. Oven kääntämiseen tarvitaan eri suuruinen voima
6 PISTETULON JA RISTITULON SOVELLUKSIA. 6.1 Pyörivistä kappaleista. Vaasan yliopiston julkaisuja Voiman momentti akselin suhteen avaruudessa
 Vaasan yliopiston julkaisuja 93 6 PISTETULON JA RISTITULON SOVELLUKSIA Ch:DotCross :RotatingBody sec:fmomspace 6.1 Pyörivistä kappaleista 6.1.1 Voiman momentti akselin suhteen avaruudessa Seuraavassa pohdiskelussa
Vaasan yliopiston julkaisuja 93 6 PISTETULON JA RISTITULON SOVELLUKSIA Ch:DotCross :RotatingBody sec:fmomspace 6.1 Pyörivistä kappaleista 6.1.1 Voiman momentti akselin suhteen avaruudessa Seuraavassa pohdiskelussa
HARMONISEN VÄRÄHTELIJÄN JAKSONAIKA JA HEILURIEN HEILAHDUSAJAT - johtaminen 1) VAIMENEMATON HARMONINEN VÄRÄHDYSLIIKE
 VAIMENEMATON HARMONINEN VÄRÄHDYSLIIKE") HARMONISEN VÄRÄHTELIJÄN JAKSONAIKA JA HEILURIEN HEILAHDUSAJAT - johtaminen 1) VAIMENEMATON HARMONINEN VÄRÄHDYSLIIKE Harmoninen voima on voima, jonka suuruus on suoraan verrannollinen poikkeamaan tasapainoasemasta
HARMONISEN VÄRÄHTELIJÄN JAKSONAIKA JA HEILURIEN HEILAHDUSAJAT - johtaminen 1) VAIMENEMATON HARMONINEN VÄRÄHDYSLIIKE Harmoninen voima on voima, jonka suuruus on suoraan verrannollinen poikkeamaan tasapainoasemasta
Kerrataan harmoninen värähtelijä Noste, nesteen ja kaasun aiheuttamat voimat Noste ja harmoninen värähtelijä (laskaria varten)
") Noste Ympyräliike I Luennon tavoitteet Kerrataan harmoninen värähtelijä Noste, nesteen ja kaasun aiheuttamat voimat Noste ja harmoninen värähtelijä (laskaria varten) Aloitetaan ympyräliikettä Keskeisvoiman
Noste Ympyräliike I Luennon tavoitteet Kerrataan harmoninen värähtelijä Noste, nesteen ja kaasun aiheuttamat voimat Noste ja harmoninen värähtelijä (laskaria varten) Aloitetaan ympyräliikettä Keskeisvoiman
Luento 10: Työ, energia ja teho
 Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho Ajankohtaista Konseptitesti 1 Kysymys Ajat pyörällä ylös jyrkkää mäkeä. Huipulle vie kaksi polkua, toinen kaksi kertaa pidempi kuin
Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho Ajankohtaista Konseptitesti 1 Kysymys Ajat pyörällä ylös jyrkkää mäkeä. Huipulle vie kaksi polkua, toinen kaksi kertaa pidempi kuin
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 2.3.2016 Susanna Hurme äivän aihe: Staattisesti määrätyn rakenteen tukireaktiot (Kirjan luvut 5.7 ja 6.6) Osaamistavoitteet: Ymmärtää, mitä tarkoittaa staattisesti
KJR-C1001 Statiikka ja dynamiikka Luento 2.3.2016 Susanna Hurme äivän aihe: Staattisesti määrätyn rakenteen tukireaktiot (Kirjan luvut 5.7 ja 6.6) Osaamistavoitteet: Ymmärtää, mitä tarkoittaa staattisesti
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 10: Moninkertaisten integraalien sovelluksia
 Luento 10: Moninkertaisten integraalien sovelluksia") MS-A22 ifferentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Moninkertaisten integraalien sovelluksia Antti Rasila Aalto-yliopisto Syksy 215 Antti Rasila (Aalto-yliopisto) MS-A22 Syksy 215 1 / 2 Moninkertaisten
MS-A22 ifferentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Moninkertaisten integraalien sovelluksia Antti Rasila Aalto-yliopisto Syksy 215 Antti Rasila (Aalto-yliopisto) MS-A22 Syksy 215 1 / 2 Moninkertaisten
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 10: Moninkertaisten integraalien sovelluksia
 Luento 10: Moninkertaisten integraalien sovelluksia") MS-A22 ifferentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Moninkertaisten integraalien sovelluksia Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 217 Antti Rasila (Aalto-yliopisto)
MS-A22 ifferentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Moninkertaisten integraalien sovelluksia Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 217 Antti Rasila (Aalto-yliopisto)
ELEC-A3110 Mekaniikka (5 op)
") Yliopistonlehtori, tkt Sami Kujala Syksy 2016 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia Ajankohtaista Presemokyselyn poimintoja Millä odotuksilla aloitat
Yliopistonlehtori, tkt Sami Kujala Syksy 2016 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia Ajankohtaista Presemokyselyn poimintoja Millä odotuksilla aloitat
x (t) = 2t ja y (t) = 3t 2 x (t) + + y (t) Lasketaan pari käyrän arvoa ja hahmotellaan kuvaaja: A 2 A 1
 = 2t ja y (t) = 3t 2 x (t) + + y (t) Lasketaan pari käyrän arvoa ja hahmotellaan kuvaaja: A 2 A 1") BM2A582 Integraalilaskenta ja sovellukset Harjoitus 6, Kevät 26 Kaikissa tehtävissä tärkeintä ja riittävää on saada oikea lauseke aikaiseksi. Useissa tehtävissä integraalit eivät tosin ole niin vaikeita
BM2A582 Integraalilaskenta ja sovellukset Harjoitus 6, Kevät 26 Kaikissa tehtävissä tärkeintä ja riittävää on saada oikea lauseke aikaiseksi. Useissa tehtävissä integraalit eivät tosin ole niin vaikeita
ELEC-A3110 Mekaniikka (5 op)
") ELEC-A3110 Mekaniikka (5 op) Yliopistonlehtori, tkt Sami Kujala Elektroniikan ja nanotekniikan laitos (ELE) Syksy 2017 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia
ELEC-A3110 Mekaniikka (5 op) Yliopistonlehtori, tkt Sami Kujala Elektroniikan ja nanotekniikan laitos (ELE) Syksy 2017 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia
Vektoreiden A = (A1, A 2, A 3 ) ja B = (B1, B 2, B 3 ) pistetulo on. Edellisestä seuraa
 ja B = (B1, B 2, B 3 ) pistetulo on. Edellisestä seuraa") Viikon aiheet Pistetulo (skalaaritulo Vektorien tulot Pistetulo Ristitulo Skalaari- ja vektorikolmitulo Integraalifunktio, alkeisfunktioiden integrointi, yhdistetyn funktion derivaatan integrointi Vektoreiden
Viikon aiheet Pistetulo (skalaaritulo Vektorien tulot Pistetulo Ristitulo Skalaari- ja vektorikolmitulo Integraalifunktio, alkeisfunktioiden integrointi, yhdistetyn funktion derivaatan integrointi Vektoreiden
Vanhoja koetehtäviä. Analyyttinen geometria 2016
 Vanhoja koetehtäviä Analyyttinen geometria 016 1. Määritä luvun a arvo, kun piste (,3) on käyrällä a(3x + a) = (y - 1). Suora L kulkee pisteen (5,1) kautta ja on kohtisuorassa suoraa 6x + 7y - 19 = 0 vastaan.
Vanhoja koetehtäviä Analyyttinen geometria 016 1. Määritä luvun a arvo, kun piste (,3) on käyrällä a(3x + a) = (y - 1). Suora L kulkee pisteen (5,1) kautta ja on kohtisuorassa suoraa 6x + 7y - 19 = 0 vastaan.
A B = (1, q, q 2 ) (2, 0, 2) = 2 2q q 2 = 0 q 2 = 1 q = ±1 A(±1) = (1, ±1, 1) A(1) A( 1) = (1, 1, 1) (1, 1, 1) = A( 1) A(1) A( 1) = 1
 (2, 0, 2) = 2 2q q 2 = 0 q 2 = 1 q = ±1 A(±1) = (1, ±1, 1) A(1) A( 1) = (1, 1, 1) (1, 1, 1) = A( 1) A(1) A( 1) = 1") Mapu I Viikko 4 tehtävä malli Millä q:n arvoilla vektori A(q) (, q, q ) on kohtisuora vektorin B (, 0, ) kanssa? Ovatko A:n eri ratkaisut keskenään kohtisuoria? Jos eivät, määrää niiden välinen kulma!
Mapu I Viikko 4 tehtävä malli Millä q:n arvoilla vektori A(q) (, q, q ) on kohtisuora vektorin B (, 0, ) kanssa? Ovatko A:n eri ratkaisut keskenään kohtisuoria? Jos eivät, määrää niiden välinen kulma!
3 Määrätty integraali
 Määrätty integraali. a) Muodostuva alue on kolmio, jonka kanta on. Kolmion korkeus on funktion arvo kohdassa, eli f() = = 6. Lasketaan A() kolmion pintaalana. 6 A() 6 Vastaus: A() = 6 b) Muodostuva alue
Määrätty integraali. a) Muodostuva alue on kolmio, jonka kanta on. Kolmion korkeus on funktion arvo kohdassa, eli f() = = 6. Lasketaan A() kolmion pintaalana. 6 A() 6 Vastaus: A() = 6 b) Muodostuva alue
HARMONISEN VÄRÄHTELIJÄN JAKSONAIKA JA HEILURIEN HEILAHDUSAJAT - johtaminen 1) VAIMENEMATON HARMONINEN VÄRÄHDYSLIIKE
 VAIMENEMATON HARMONINEN VÄRÄHDYSLIIKE") HARMONISEN VÄRÄHTELIJÄN JAKSONAIKA JA HEILURIEN HEILAHDUSAJAT - johtaminen 1) VAIMENEMATON HARMONINEN VÄRÄHDYSLIIKE Harmoninen voima on voima, jonka suuruus on suoraan verrannollinen poikkeamaan tasapainoasemasta
HARMONISEN VÄRÄHTELIJÄN JAKSONAIKA JA HEILURIEN HEILAHDUSAJAT - johtaminen 1) VAIMENEMATON HARMONINEN VÄRÄHDYSLIIKE Harmoninen voima on voima, jonka suuruus on suoraan verrannollinen poikkeamaan tasapainoasemasta
TÄSSÄ ON ESIMERKKEJÄ SÄHKÖ- JA MAGNETISMIOPIN KEVÄÄN 2017 MATERIAALISTA
 TÄSSÄ ON ESMERKKEJÄ SÄHKÖ- JA MAGNETSMOPN KEVÄÄN 2017 MATERAALSTA a) Määritetään magneettikentän voimakkuus ja suunta q P = +e = 1,6022 10 19 C, v P = (1500 m s ) i, F P = (2,25 10 16 N)j q E = e = 1,6022
TÄSSÄ ON ESMERKKEJÄ SÄHKÖ- JA MAGNETSMOPN KEVÄÄN 2017 MATERAALSTA a) Määritetään magneettikentän voimakkuus ja suunta q P = +e = 1,6022 10 19 C, v P = (1500 m s ) i, F P = (2,25 10 16 N)j q E = e = 1,6022
l 1 2l + 1, c) 100 l=0 AB 3AC ja AB AC sekä vektoreiden AB ja
 100 l=0 AB 3AC ja AB AC sekä vektoreiden AB ja") MATEMATIIKAN PERUSKURSSI I Harjoitustehtäviä syksy 7. Millä reaaliluvun arvoilla a) 9 =, b) + 5 + +, e) 5?. Kirjoita Σ-merkkiä käyttäen summat 4, a) + + 5 + + 99, b) 5 + 4 65 + + n 5 n, c) +
MATEMATIIKAN PERUSKURSSI I Harjoitustehtäviä syksy 7. Millä reaaliluvun arvoilla a) 9 =, b) + 5 + +, e) 5?. Kirjoita Σ-merkkiä käyttäen summat 4, a) + + 5 + + 99, b) 5 + 4 65 + + n 5 n, c) +
l 1 2l + 1, c) 100 l=0
 100 l=0") MATEMATIIKAN PERUSKURSSI I Harjoitustehtäviä syksy 5. Millä reaaliluvun arvoilla a) 9 =, b) 5 + 5 +, e) 5?. Kirjoita Σ-merkkiä käyttäen summat 4, a) + + 5 + + 99, b) 5 + 4 65 + + n 5 n, c)
MATEMATIIKAN PERUSKURSSI I Harjoitustehtäviä syksy 5. Millä reaaliluvun arvoilla a) 9 =, b) 5 + 5 +, e) 5?. Kirjoita Σ-merkkiä käyttäen summat 4, a) + + 5 + + 99, b) 5 + 4 65 + + n 5 n, c)
Luento 2: Liikkeen kuvausta
 Luento 2: Liikkeen kuvausta Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Luennon sisältö Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Liikkeen ratkaisu kiihtyvyydestä
Luento 2: Liikkeen kuvausta Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Luennon sisältö Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Liikkeen ratkaisu kiihtyvyydestä
nopeammin. Havaitaan, että kussakin tapauksessa kuvaaja (t, ϕ)-koordinaatistossa on nouseva suora.
-koordinaatistossa on nouseva suora.") nopeammin. Havaitaan, että kussakin tapauksessa kuvaaja (t, ϕ)-koordinaatistossa on nouseva suora. Teimme mittaukset käyttäen Pascon pyörimisliikelaitteistoa (ME-895) ja Logger Promittausohjelmaa. Kuva
nopeammin. Havaitaan, että kussakin tapauksessa kuvaaja (t, ϕ)-koordinaatistossa on nouseva suora. Teimme mittaukset käyttäen Pascon pyörimisliikelaitteistoa (ME-895) ja Logger Promittausohjelmaa. Kuva
x + 1 πx + 2y = 6 2y = 6 x 1 2 πx y = x 1 4 πx Ikkunan pinta-ala on suorakulmion ja puoliympyrän pinta-alojen summa, eli
 BM0A5810 - Differentiaalilaskenta ja sovellukset Harjoitus, Syksy 015 1. a) Funktio f ) = 1) vaihtaa merkkinsä pisteissä = 1, = 0 ja = 1. Lisäksi se on pariton funktio joten voimme laskea vain pinta-alan
BM0A5810 - Differentiaalilaskenta ja sovellukset Harjoitus, Syksy 015 1. a) Funktio f ) = 1) vaihtaa merkkinsä pisteissä = 1, = 0 ja = 1. Lisäksi se on pariton funktio joten voimme laskea vain pinta-alan
MATEMATIIKAN PERUSKURSSI I Harjoitustehtäviä syksy Millä reaaliluvun x arvoilla. 3 4 x 2,
 MATEMATIIKAN PERUSKURSSI I Harjoitustehtäviä syksy 6. Millä reaaliluvun arvoilla a) 9 =, b) + + + 4, e) 5?. Kirjoita Σ-merkkiä käyttäen summat 4, a) + 4 + 6 + +, b) 8 + 4 6 + + n n, c) + + +
MATEMATIIKAN PERUSKURSSI I Harjoitustehtäviä syksy 6. Millä reaaliluvun arvoilla a) 9 =, b) + + + 4, e) 5?. Kirjoita Σ-merkkiä käyttäen summat 4, a) + 4 + 6 + +, b) 8 + 4 6 + + n n, c) + + +
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 5: Kaarenpituus ja skalaarikentän viivaintegraali
 MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 5: Kaarenpituus ja skalaarikentän viivaintegraali Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2015 1 /
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 5: Kaarenpituus ja skalaarikentän viivaintegraali Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2015 1 /
763306A JOHDATUS SUHTEELLISUUSTEORIAAN 2 Ratkaisut 2 Kevät 2017
 763306A JOHDATUS SUHTEELLISUUSTEORIAAN 2 Ratkaisut 2 Kevät 207. Nelinopeus ympyräliikkeessä On siis annettu kappaleen paikkaa kuvaava nelivektori X x µ : Nelinopeus U u µ on määritelty kaavalla x µ (ct,
763306A JOHDATUS SUHTEELLISUUSTEORIAAN 2 Ratkaisut 2 Kevät 207. Nelinopeus ympyräliikkeessä On siis annettu kappaleen paikkaa kuvaava nelivektori X x µ : Nelinopeus U u µ on määritelty kaavalla x µ (ct,
ELEC C4140 Kenttäteoria (syksy 2015)
") ELEC C4140 Kenttäteoria (syksy 2015) Henrik Wallén Luentoviiko 3 / versio 23. syyskuuta 2015 Vektorianalyysi (Ulaby, luku 3) Koordinaatistot Viiva-, pinta- ja tilavuusalkiot Koordinaattimuunnokset Nablaoperaatiot
ELEC C4140 Kenttäteoria (syksy 2015) Henrik Wallén Luentoviiko 3 / versio 23. syyskuuta 2015 Vektorianalyysi (Ulaby, luku 3) Koordinaatistot Viiva-, pinta- ja tilavuusalkiot Koordinaattimuunnokset Nablaoperaatiot
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 3: Vektorikentät
 MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 3: Vektorikentät Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 2016 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2016
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 3: Vektorikentät Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 2016 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2016
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 1.3.2016 Susanna Hurme Päivän aihe: Jäykän kappaleen tasapaino ja vapaakappalekuva (Kirjan luvut 5.1-5.4) Osaamistavoitteet: 1. Ymmärtää, mitä tukireaktiot ovat
KJR-C1001 Statiikka ja dynamiikka Luento 1.3.2016 Susanna Hurme Päivän aihe: Jäykän kappaleen tasapaino ja vapaakappalekuva (Kirjan luvut 5.1-5.4) Osaamistavoitteet: 1. Ymmärtää, mitä tukireaktiot ovat
KJR-C1001: Statiikka L2 Luento : voiman momentti ja voimasysteemit
 KJR-C1001: Statiikka L2 Luento 21.2.2018: voiman momentti ja voimasysteemit Apulaisprofessori Konetekniikan laitos Luennon osaamistavoitteet Tämän päiväisen luennon jälkeen opiskelija Pystyy muodostamaan,
KJR-C1001: Statiikka L2 Luento 21.2.2018: voiman momentti ja voimasysteemit Apulaisprofessori Konetekniikan laitos Luennon osaamistavoitteet Tämän päiväisen luennon jälkeen opiskelija Pystyy muodostamaan,
Nyt kerrataan! Lukion FYS5-kurssi
 Nyt kerrataan! Lukion FYS5-kurssi Vaakasuora heittoliike Heittoliikettä voidaan tarkastella erikseen vaaka- ja pystysuunnassa v=(v x,v y ) Jos ilmanvastausta ei oteta huomioon (yleensä ei), vaakasuunnalle
Nyt kerrataan! Lukion FYS5-kurssi Vaakasuora heittoliike Heittoliikettä voidaan tarkastella erikseen vaaka- ja pystysuunnassa v=(v x,v y ) Jos ilmanvastausta ei oteta huomioon (yleensä ei), vaakasuunnalle
Kertaus. Integraalifunktio ja integrointi. 2( x 1) 1 2x. 3( x 1) 1 (3x 1) KERTAUSTEHTÄVIÄ. K1. a)
 1 2x. 3( x 1) 1 (3x 1) KERTAUSTEHTÄVIÄ. K1. a)") Juuri 9 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 5.5.6 Kertaus Integraalifunktio ja integrointi KERTAUSTEHTÄVIÄ K. a) ( )d C C b) c) d e e C cosd cosd sin C K. Funktiot F ja F ovat saman
Juuri 9 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 5.5.6 Kertaus Integraalifunktio ja integrointi KERTAUSTEHTÄVIÄ K. a) ( )d C C b) c) d e e C cosd cosd sin C K. Funktiot F ja F ovat saman
Kinematiikka. Tommi Lintilä, Kari Tammi (Janne Ojalan kalvoista)
") 1 Kinematiikka Tommi Lintilä, Kari Tammi (Janne Ojalan kalvoista) 27.01.2016 Luennon sisältö Mekanismiopin ja kinematiikan käsitteitä Liikkuvuusaste ja vapausasteet Paikan määrittäminen Graafinen ratkaisu
1 Kinematiikka Tommi Lintilä, Kari Tammi (Janne Ojalan kalvoista) 27.01.2016 Luennon sisältö Mekanismiopin ja kinematiikan käsitteitä Liikkuvuusaste ja vapausasteet Paikan määrittäminen Graafinen ratkaisu
Juuri 7 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty c) sin 50 = sin ( ) = sin 130 = 0,77
 sin 50 = sin ( ) = sin 130 = 0,77") Juuri 7 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty.5.07 Kertaus K. a) sin 0 = 0,77 b) cos ( 0 ) = cos 0 = 0,6 c) sin 50 = sin (80 50 ) = sin 0 = 0,77 d) tan 0 = tan (0 80 ) = tan 0 =,9 e)
Juuri 7 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty.5.07 Kertaus K. a) sin 0 = 0,77 b) cos ( 0 ) = cos 0 = 0,6 c) sin 50 = sin (80 50 ) = sin 0 = 0,77 d) tan 0 = tan (0 80 ) = tan 0 =,9 e)
Suorat ja tasot, L6. Suuntajana. Suora xy-tasossa. Suora xyzkoordinaatistossa. Taso xyzkoordinaatistossa. Tason koordinaattimuotoinen yhtälö.
 Suorat ja tasot, L6 Suora xyz-koordinaatistossa Taso xyz-koordinaatistossa stä stä 1 Näillä kalvoilla käsittelemme kolmen laisia olioita. Suora xyz-avaruudessa. Taso xyz-avaruudessa. Emme nyt ryhdy pohtimaan,
Suorat ja tasot, L6 Suora xyz-koordinaatistossa Taso xyz-koordinaatistossa stä stä 1 Näillä kalvoilla käsittelemme kolmen laisia olioita. Suora xyz-avaruudessa. Taso xyz-avaruudessa. Emme nyt ryhdy pohtimaan,
Vektoriarvoiset funktiot Vektoriarvoisen funktion jatkuvuus ja derivoituvuus
 8. Vektoriarvoiset funktiot 8.1. Vektoriarvoisen funktion jatkuvuus ja derivoituvuus 320. Olkoon u reaalimuuttujan vektoriarvoinen funktio R R n ja lim t a u(t) = b. Todista: lim t a u(t) = b. 321. Olkoon
8. Vektoriarvoiset funktiot 8.1. Vektoriarvoisen funktion jatkuvuus ja derivoituvuus 320. Olkoon u reaalimuuttujan vektoriarvoinen funktio R R n ja lim t a u(t) = b. Todista: lim t a u(t) = b. 321. Olkoon
8 Suhteellinen liike (Relative motion)
") 8 Suhteellinen liike (Relative motion) 8.1 Inertiaalikoordinaatistot (Inertial reference of frames) Newtonin I laki on II lain erikoistapaus. Jos kappaleeseen ei vaikuta ulkoisia voimia, ei kappaleen liikemäärä
8 Suhteellinen liike (Relative motion) 8.1 Inertiaalikoordinaatistot (Inertial reference of frames) Newtonin I laki on II lain erikoistapaus. Jos kappaleeseen ei vaikuta ulkoisia voimia, ei kappaleen liikemäärä
Luvun 10 laskuesimerkit
 Luvun 10 laskuesimerkit Esimerkki 10.1 Tee-se-itse putkimies ei saa vesiputken kiinnitystä auki putkipihdeillään, joten hän päättää lisätä vääntömomenttia jatkamalla pihtien vartta siihen tiukasti sopivalla
Luvun 10 laskuesimerkit Esimerkki 10.1 Tee-se-itse putkimies ei saa vesiputken kiinnitystä auki putkipihdeillään, joten hän päättää lisätä vääntömomenttia jatkamalla pihtien vartta siihen tiukasti sopivalla
Havainnollistuksia: Merkitään w = ( 4, 3) ja v = ( 3, 2). Tällöin. w w = ( 4) 2 + ( 3) 2 = 25 = 5. v = ( 3) = 13. v = v.
 ja v = ( 3, 2). Tällöin. w w = ( 4) 2 + ( 3) 2 = 25 = 5. v = ( 3) = 13. v = v.") Havainnollistuksia: Merkitään w = ( 4, 3) ja v = ( 3, 2). Tällöin w = w w = ( 4) 2 + ( 3) 2 = 25 = 5 v = v v = ( 3) 2 + 2 2 = 13. w =5 3 2 v = 13 4 3 LM1, Kesä 2014 76/102 Normin ominaisuuksia I Lause
Havainnollistuksia: Merkitään w = ( 4, 3) ja v = ( 3, 2). Tällöin w = w w = ( 4) 2 + ( 3) 2 = 25 = 5 v = v v = ( 3) 2 + 2 2 = 13. w =5 3 2 v = 13 4 3 LM1, Kesä 2014 76/102 Normin ominaisuuksia I Lause
Luento 4: Liikkeen kuvausta, differentiaaliyhtälöt
 Luento 4: Liikkeen kuvausta, differentiaaliyhtälöt Digress: vakio- vs. muuttuva kiihtyvyys käytännössä Kinematiikkaa yhdessä dimensiossa taustatietoa Matlab-esittelyä 1 / 20 Luennon sisältö Digress: vakio-
Luento 4: Liikkeen kuvausta, differentiaaliyhtälöt Digress: vakio- vs. muuttuva kiihtyvyys käytännössä Kinematiikkaa yhdessä dimensiossa taustatietoa Matlab-esittelyä 1 / 20 Luennon sisältö Digress: vakio-
DYNAMIIKKA II, LUENTO 6 (SYKSY 2015) Arttu Polojärvi
 Arttu Polojärvi") DYNAMIIKKA II, LUENTO 6 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Mekaniikan peruslait (liikelait). Liikemäärän momentin tase. Kappaleen massan vaikutusmitat. Jäykän
DYNAMIIKKA II, LUENTO 6 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Mekaniikan peruslait (liikelait). Liikemäärän momentin tase. Kappaleen massan vaikutusmitat. Jäykän
Kvanttifysiikan perusteet 2017
 Kvanttifysiikan perusteet 207 Harjoitus 2: ratkaisut Tehtävä Osoita hyödyntäen Maxwellin yhtälöitä, että tyhjiössä magneettikenttä ja sähkökenttä toteuttavat aaltoyhtälön, missä aallon nopeus on v = c.
Kvanttifysiikan perusteet 207 Harjoitus 2: ratkaisut Tehtävä Osoita hyödyntäen Maxwellin yhtälöitä, että tyhjiössä magneettikenttä ja sähkökenttä toteuttavat aaltoyhtälön, missä aallon nopeus on v = c.
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys102 Kevät 2010 Jukka Maalampi LUENTO 6 Yksinkertainen harmoninen liike yhteys ympyräliikkeeseen energia dynamiikka Värähdysliike Knight Ch 14 Heilahtelut pystysuunnassa ja gravitaation
Mekaniikan jatkokurssi Fys102 Kevät 2010 Jukka Maalampi LUENTO 6 Yksinkertainen harmoninen liike yhteys ympyräliikkeeseen energia dynamiikka Värähdysliike Knight Ch 14 Heilahtelut pystysuunnassa ja gravitaation
9. Vektorit. 9.1 Skalaarit ja vektorit. 9.2 Vektorit tasossa
 9. Vektorit 9.1 Skalaarit ja vektorit Skalaari on koon tai määrän mitta. Tyypillinen esimerkki skalaarista on massa. Lukumäärä on toinen hyvä esimerkki skalaarista. Vektorilla on taas suuruus ja suunta.
9. Vektorit 9.1 Skalaarit ja vektorit Skalaari on koon tai määrän mitta. Tyypillinen esimerkki skalaarista on massa. Lukumäärä on toinen hyvä esimerkki skalaarista. Vektorilla on taas suuruus ja suunta.
1. Olkoot vektorit a, b ja c seuraavasti määritelty: a) Määritä vektori. sekä laske sen pituus.
 Määritä vektori. sekä laske sen pituus.") Matematiikan kurssikoe, Maa4 Vektorit RATKAISUT Sievin lukio Keskiviikko 12.4.2017 VASTAA YHTEENSÄ VIITEEN TEHTÄVÄÄN! MAOL JA LASKIN/LAS- KINOHJELMAT OVAT SALLITTUJA! 1. Olkoot vektorit a, b ja c seuraavasti
Matematiikan kurssikoe, Maa4 Vektorit RATKAISUT Sievin lukio Keskiviikko 12.4.2017 VASTAA YHTEENSÄ VIITEEN TEHTÄVÄÄN! MAOL JA LASKIN/LAS- KINOHJELMAT OVAT SALLITTUJA! 1. Olkoot vektorit a, b ja c seuraavasti
Lineaarialgebra MATH.1040 / voima
 Lineaarialgebra MATH.1040 / voima 1 Seuraavaksi määrittelemme kaksi vektoreille määriteltyä tuloa; pistetulo ja. Määritelmät ja erilaiset tulojen ominaisuudet saattavat tuntua, sekavalta kokonaisuudelta.
Lineaarialgebra MATH.1040 / voima 1 Seuraavaksi määrittelemme kaksi vektoreille määriteltyä tuloa; pistetulo ja. Määritelmät ja erilaiset tulojen ominaisuudet saattavat tuntua, sekavalta kokonaisuudelta.
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 8.3.2016 Susanna Hurme Päivän aihe: Normaalivoiman, leikkausvoiman ja taivutusmomentin käsitteet (Kirjan luku 7.1) Osaamistavoitteet: Ymmärtää, millaisia sisäisiä
KJR-C1001 Statiikka ja dynamiikka Luento 8.3.2016 Susanna Hurme Päivän aihe: Normaalivoiman, leikkausvoiman ja taivutusmomentin käsitteet (Kirjan luku 7.1) Osaamistavoitteet: Ymmärtää, millaisia sisäisiä
Jäykän kappaleen mekaniikkaa
 Jäykän kappaleen mekaniikkaa 29. joulukuuta 2005 Sisältö 1 Johdanto 1 2 Jäykän kappaleen mekaniikka 2 2.1 Pyörivä koordinaatisto...................... 2 2.2 Vakio Ω.............................. 3 2.3
Jäykän kappaleen mekaniikkaa 29. joulukuuta 2005 Sisältö 1 Johdanto 1 2 Jäykän kappaleen mekaniikka 2 2.1 Pyörivä koordinaatisto...................... 2 2.2 Vakio Ω.............................. 3 2.3
RTEK-2000 Statiikan perusteet. 1. välikoe ke LUENTOSALEISSA K1705 klo 11:00-14:00 sekä S4 klo 11:15-14:15 S4 on sähkötalossa
 RTEK-2000 Statiikan perusteet 1. välikoe ke 27.2. LUENTOSALEISSA K1705 klo 11:00-14:00 sekä S4 klo 11:15-14:15 S4 on sähkötalossa RTEK-2000 Statiikan perusteet 4 op 1. välikoealue luennot 21.2. asti harjoitukset
RTEK-2000 Statiikan perusteet 1. välikoe ke 27.2. LUENTOSALEISSA K1705 klo 11:00-14:00 sekä S4 klo 11:15-14:15 S4 on sähkötalossa RTEK-2000 Statiikan perusteet 4 op 1. välikoealue luennot 21.2. asti harjoitukset
 MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
Luvun 5 laskuesimerkit
 Luvun 5 laskuesimerkit Huom: luvun 4 kohdalla luennolla ei ollut laskuesimerkkejä, vaan koko luvun 5 voi nähdä kokoelmana sovellusesimerkkejä edellisen luvun asioihin! Esimerkki 5.1 Moottori roikkuu oheisen
Luvun 5 laskuesimerkit Huom: luvun 4 kohdalla luennolla ei ollut laskuesimerkkejä, vaan koko luvun 5 voi nähdä kokoelmana sovellusesimerkkejä edellisen luvun asioihin! Esimerkki 5.1 Moottori roikkuu oheisen