KJR-C1001: Statiikka L2 Luento : voiman momentti ja voimasysteemit
|
|
|
- Johanna Karjalainen
- 5 vuotta sitten
- Katselukertoja:
Transkriptio
1 KJR-C1001: Statiikka L2 Luento : voiman momentti ja voimasysteemit Apulaisprofessori Konetekniikan laitos
2 Luennon osaamistavoitteet Tämän päiväisen luennon jälkeen opiskelija Pystyy muodostamaan, käsittelemään ja soveltamaan momenttia vektorimuodossa. Tuntee käsitteet samanarvoinen (ekvivalentti) voimasysteemi ja jakaantunut voima Osaa yksinkertaistaa voimasysteemejä redusoimalla ne ekvivalenteiksi voimasysteemeiksi.
3


4 Voiman momentti Voima pyrkii kiertämään kappaletta vaikutussuoransa ulkopuolisen pisteen suhteen Tämä on voiman momentti tai momentti. Momenttia kutsutaan myös väännöksi (ylhäällä) tai taivutusmomentiksi (alhaalla). Momentin suuruus: Suoraan verrannollinen voiman suuruuteen sekä pisteen ja vaikutussuoran väliseen kohtisuoraan etäisyyteen, voiman varteen.

5 Voiman momentti Momentilla on suuruus ja suunta: Momentti on siis vektori Merkintä: voiman! aiheuttama momentti pisteen " suhteen on # $. Momentin suuruus on voima kertaa varsi: % $ = '( Momentin suunta määräytyy oikean käden säännön mukaisesti: Vastapäivään positiivinen, myötäpäivään negatiivinen (oikean käden sormet antavat positiiviseen kiertosuunnan peukalon osoittaman vektorin suhteen).


6 Esimerkki Mikä on voiman varsi!, kun halutaan laskea momentti pisteen " ympäri?
7 Momentin skalaarimuoto Tasossa (2D) on kätevää tarkastella momenttia skalaarimuodossa, jolloin yhtälöt ovat yksinkertaisempia, kuin vektorimuotoiset yhtälöt. Tasossa momentin resultantti saadaan laskemalla yhteen kaikkien voimasysteemin voimien aiheuttamat momentit + $ % & = Σ) * + * $ % & = ), +, ) ) / + / Huomaathan näissä etumerkin! Positiivinen suunta vastapäivään!
8 Momentin skalaarimuoto Laske resultanttimomentti, kun! " =! $ =! % = 100 N, * " = 1 m, * $ = 1,3 m, * % = 1,2 m =! " * "! $ * $ +! % * % = Nm = 90(Nm) Laske resultanttimomentti, kun! " =! % = 100 N,! $ = 200 N, * " = * % = 1 m, * $ = 1,2 m = Nm = 40(Nm) Mihin suuntaan positiivinen ja negatiivinen resultanttimomentti pyrkivät pyörittämään kappaletta?
9 Momentin vektorimuoto Momenttivektori pisteessä on voiman paikkavektorin (pisteen suhteen) ja voimavektorin ristitulo! " = $ &


10 Momentin vektorimuoto Ristitulo Kahden vektorin ristitulo tuottaa vektorin! = # %! = '( sin,. / Vektorin! suuruus (itseisarvo): & = '( sin, Vektori! on kohtisuorassa vektoreiden # ja % muodostamaa tasoa vastaan ja sen suunta määräytyy oikean käden säännön avulla. Huomaa myös, että % # =!
11 Momentin vektorimuoto Kantavektoreiden i ja j ristitulo! # : Suuruus: i j sin 90 = = 1 Suunta: oikean käden säännön mukaisesti! # = (! ( = # ( # =?!! = # # = ( ( =? (ks. määritelmä edellä!)
12 Momentin vektorimuoto Helpohkoa kantavektoreiden ristitulojen avulla / 0 = # $ & + # ) * + # +, % $ & + % ) * + % +, = # $ % $ & & + # $ % ) & * + # $ % + &, + = # ) % + # + % ) & # $ % + # + % $ * + # $ % ) # ) % $, Tai sitten determinantin avulla / 0 = & *, # $ # ) # + % $ % ) % +
 Muista miinus-merkki! #-alkiolle:!")
13 Momentin vektorimuoto!-alkiolle:! " # $ % $ & $ ' ( % ( & ( ' =!($ & ( ' $ ' ( & ) Determinantti: $ )) $ )* $ *) $ ** = $ )) $ ** $ )* $ *) "-alkiolle:! " # $ % $ & $ ' ( % ( & ( ' = "($ % ( ' $ ' ( % ) Muista miinus-merkki! #-alkiolle:! " # $ % $ & $ ' ( % ( & ( ' = #($ % ( & $ & ( % ) Lopuksi lasketaan tulokset yhteen.
14 Momentin vektorimuoto - esimerkki Laske! #, kun! = 2& + ( * ja # = 5( + 2* Tapa 1. Sijoitetaan tunnettuun kaavaan:! # =, -. /, /. - &, 0. /, /. 0 ( +, 0. -, -. 0 * = (1)(2) ( 1)(5) & (2)(2) ( 1)(0) ( + (2)(5) 1 0 * = 7& 4( + 10* Tapa 2. Ratkaise (2& + ( *) (5( + 2*) käyttäen kantavektoreiden ristituloja. Tapa 3. Ratkaise determinantti & ( *, 0, -, / = / & ( * = 2 5 & 4 0 ( * = 7& 4( + 10*
.")

15 Momentin vektorimuoto Momenttivektori: paikkavektorin ja voimavektorin ristitulo.! " = $ & Momentti lasketaan aina jonkin pisteen suhteen (tässä '). Momentin suuruus on ristitulon määritelmän mukaan ( " = $ & = *+ sin / = +(* sin /) = +2 Suunta: oikean käden sääntö. Paikkavektori $ voi osoittaa mileivaltaiseen voiman vaikutussuoran pisteeseen (vastaavasti voima voi myös liikkua vaikutussuorallaan) momentti säilyy vakiona.
 * 0 Momentti x-akselin ympäri pisteessä 4 (2 \" ) - = ' ( ) * ' * ) ( Huomaa: Momenttivektorin komponenteilla on fysikaalinen merkitys!")
16 Momentin vektorimuoto! " = $ & = ' ( ) * ' * ) (, ' - ) * ' * ) -. + ' - ) ( ' ( ) - 0 = (2 " ) -, + (2 " ) (. + (2 " ) * 0 Momentti x-akselin ympäri pisteessä 4 (2 " ) - = ' ( ) * ' * ) ( Huomaa: Momenttivektorin komponenteilla on fysikaalinen merkitys! Ne kertovat voiman momentin koordinaattiakselien ympäri siten, että esimerkiksi x-komponentti on momentti x-akselin ympäri (siksi x-akselin suuntainen voima ei voi esiintyä siinä).

17 Momentin vektorimuoto Voimasysteemi aiheuttaa resultanttimomentin! "# = % & ( & + % * ( * + % + ( + =. & % - ( - (Tässä tapauksessa summalausekkeessa n=3)
18 Esimerkki Määritä voimien aiheuttama resultanttimomentti putken kiinnityspisteen! suhteen. Tapa 1. Skalaarimenetelmä Lasketaan jokaisen voiman momentti pisteen! ympäri ja summataan ne: = Σ: ; < ;, johon saadaan etäisyydet kuvasta " ( cos 45 ) m = 600N 1m 300N m + 500N(( ) m) 2.5 sin 45 m # = Nm = 1254 Nm? 7 = Nm Huomaa momenttivektorin suunnan miettiminen: Skalaarimenetelmässä joudut päättelemään tämän.
 ja sekä voimavektorit 4 5 = 9 m 4 6 = 4 8 = 3 + 2.5 2 9 + 2.5 2 ; m < 5 = 600; N < 6 = 3009 N < 8 = 500; N 4 5 4 6 = 4 8 2.")
19 Esimerkki Määritä voimien aiheuttama resultanttimomentti putken kiinnityspisteen! suhteen. " ( cos 45 ) m Tapa 2. Vektorimenetelmä Määritetään paikkavektorit (tässä siis pisteen O suhteen) ja sekä voimavektorit 4 5 = 9 m 4 6 = 4 8 = ; m < 5 = 600; N < 6 = 3009 N < 8 = 500; N = sin 45 m # A BC = Σ 4 < = 4 5 < < < 8 = 600F F F = F = 1254F Nm Momenttivektorin suunta tulee suoraan ristituloista! Jos olo tuntuu epävarmalta ristitulojen suhteen: laske käsin auki ristitulot edeltä ja tarkasta tulos.
20 Momenttiperiaate Voiman aiheuttama momentti pisteen suhteen on yhtä suuri kuin saman voiman komponenttien aiheuttamien momenttien summa saman pisteen suhteen. Laske voiman momentti pisteen! ympäri. ) ( Tapa 1. Laske geometrian avulla voiman vaikutussuoran (punainen katkoviiva) etäisyys pisteestä! $ % = '(. * Tapa 2. Jaetaan voima komponentteihin, lasketaan komponenttien aiheuttamat momentit pisteen! suhteen ja summataan saadut komponentit (tässä esimerkissä helpompi tapa).
, etäisyys ( ja työkalun varren pituus ( \" = ( cos.. Huomaa, että! \"! $. Momentin")
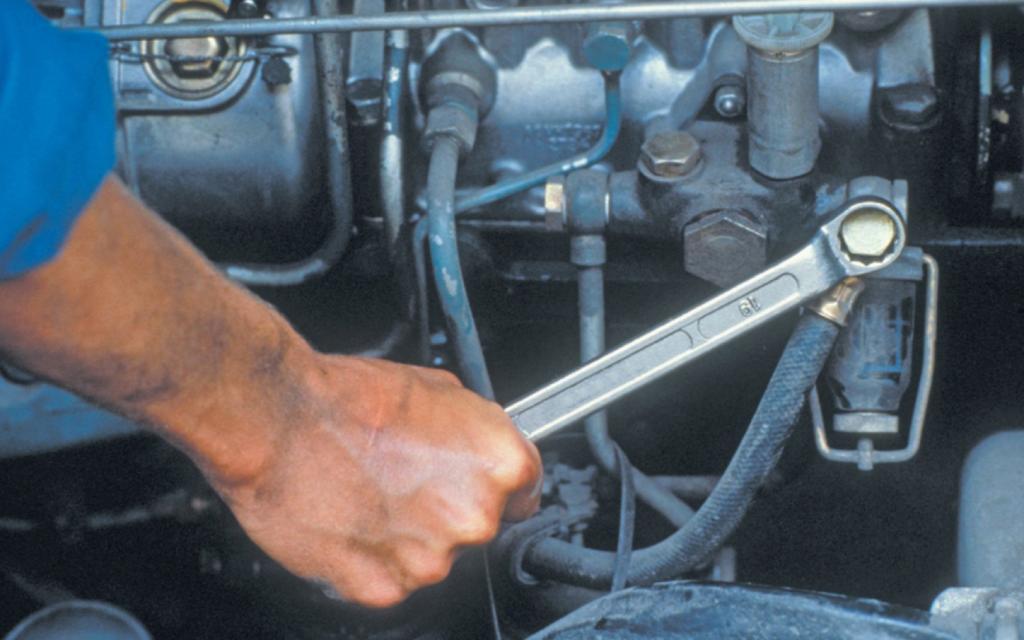
21 Momentti tietyn akselin ympäri Pisteessä O olevan pultin akseli on y-akselin suuntainen: pulttia avaavan momentin on myös oltava y-akselin suuntainen! ". Ratkaise avaava momentti! ", kun tunnetaan voima F (z-akselin suuntainen), etäisyys ( ja työkalun varren pituus ( " = ( cos.. Huomaa, että! "! $. Momentin % $ suuruus % $ = '(. Momentin! $ suunnan määrittely selkeästi helpoin tehdä vektorimuotoisten yhtälöiden avulla. Momentin komponentin! " suuruus määräytyy voiman vaikutussuoran y-akselia kohtisuoraan vastaan olevan komponentin kohtisuoran etäisyyden mukaan. % " = '( " = '( cos.
22 Esimerkki Määritä oheisen kuvan mukaisessa laatan kuormitustapauksessa voimien aiheuttama momentti kuvan x-, y- ja z- akselien ympäri. Momentti x-akselin ympäri. + $ % = 100N 3m = 300 Nm z 100 N Momentti y-akselin ympäri. 50 N 200 N y + $ - = 200N 2m = 400 Nm 2 m Momentti z-akselin ympäri. x 3 m 300 N + $ 0 = 300N 2m = 600 Nm
, etäisyys $ ja työkalun varren pituus $ \" = $ cos ). Yleisempi (parempi) tapa on käyttää vektoreita = * - = $ cos ) / + $ sin ) 3 4 5!")
23 Momentti tietyn akselin ympäri Pisteessä O olevan pultin akseli on y-akselin suuntainen: pulttia avaavan momentin on myös oltava y-akselin suuntainen! ". Ratkaise avaava momentti! ", kun tunnetaan voima F (z-akselin suuntainen), etäisyys $ ja työkalun varren pituus $ " = $ cos ). Yleisempi (parempi) tapa on käyttää vektoreita = * - = $ cos ) / + $ sin ) 3 4 5! 6 = 4$ sin ) / + 4$ cos ) 3 Skalaariprojektion avulla (pistetulo) saadaan 7 " = 3! 6 = 4$ cos ) ja kun vielä huomioidaan projektion suunta! " = 4$ cos ) 3

24 Momentti tietyn akselin ympäri Jos tunnetaan voiman & aiheuttama momentti! ' = ( & akselilla * olevan mielivaltaisen pisteen + suhteen, saadaan akselin ympäri vaikuttavan momentin suuruus skalaariprojektiolla $ " = % "! ' = % " (( &) jossa % " on akselin * suuntainen yksikkövektori. Edellä esiintyy skalaarikolmitulo, joka saadaan vaikkapa determinantista (tai ihan vaan laskemalla auki risti- ja pistetulo) $ " = % " (( &) = 0 " 1 0 " 2 0 " Momentin suunnan antaa akselin suuntainen yksikkövektori % ", joten! " = $ " % "
25 Esimerkki Kuvan mukaista rakennetta kuormittaa voima! = 300% 200( + 150, N pisteessä B. Ratkaise momentti x-akselin suhteen. Määritetään voiman paikkavektori / 01 (O on x-akselilla) / 01 = 0.3% + 0.4( 0.2, m 8 0 = / 01! Yksikkövektori 5 6 x-akselin suuntaan on kantavektori %. / 01 = 6 = % 8 0 = % (/ 01!) = = = 20 (Nm) 8 6 = 20 % (Nm)
.")
26 Voimaparin momentti Voimapari = kaksi samansuuruista ja yhdensuuntaista, mutta erimerkkistä voimaa Resultanttivoima on nolla (# # = 0). Voimapari aiheuttaa ainoastaan momentin, jota kutsutaan voimaparin momentiksi ja joka riippuu ainoastaan voimien suuruudesta ja niiden välisestä kohtisuorasta etäisyydestä on ). Voimaparin momentti mielivaltaisen pisteen O suhteen on * = +, = (+, + 0 ). = +. Voimaparin momentti on vapaa vektori: momentti ei riipu voimien etäisyydestä pisteestä O, ainoastaan voimien välisestä etäisyydestä r (esim. kappaleeseen vaikuttaisi kaikkialla sama momentti *).
!")

27 Voimaparin momentti Voimaparin momentin suuruus (d on voimien kohtisuora etäisyys)! = #$ Momentin suunta määräytyy oikean käden säännön mukaisesti. Voimaparien sanotaan olevan ovat samanarvoisia, kun niiden momentit ovat yhtä suuria ja samansuuntaisia.
28 Esimerkki Määritä kuvan tapauksessa voimaparin aiheuttama momenttivektori (Huom! Kaikkien pisteiden suhteen yhtä suuri!). Määritetään tässä pisteen B paikkavektori pisteen A suhteen # $% = 0.43 m Kirjoitetaan voimavektori ' % (kuvan perusteella) ' % = 4 % % %7. = ( )+ + ( 3 450). = N 5 # $% Voimaparin momentti on! = # $% ' % = Nm
 kappaleen tukien reaktiovoimia, jos kappaleen liike on estetty tuilla (statiikka) (2) kappaleen liikettä ja rotaatiota, jos kappale on vapaa liikkumaan")
29 Samanarvoiset (ekvivalentit) voimasysteemit Voimasysteemit ovat samanarvoisia, jos ne aiheuttavat kappaleeseen saman ulkoisen vaikutuksen Voimasysteemin ulkoinen vaikutus tarkoittaa: (1) kappaleen tukien reaktiovoimia, jos kappaleen liike on estetty tuilla (statiikka) (2) kappaleen liikettä ja rotaatiota, jos kappale on vapaa liikkumaan (dynamiikka)
30 Samanarvoiset (ekvivalentit) voimasysteemit Korvataan ylemmän kuvan kahdesta voimasta ja voimaparin momentista koostuva voimasysteemi samanarvoisella, mutta pisteessä! vaikuttavalla voimasysteemillä. Voima " # korvataan pisteessä! vaikuttavalla voimalla " # sekä voimaparin momentilla (% & ) # = ) # " #. Voima " + korvataan pisteessä! vaikuttavalla voimalla " + sekä voimaparin momentilla (% & ) + = ) + " +. Voimaparin momentti % on vapaa vektori, joka voidaan siirtää sellaisenaan pisteeseen!.
31 Samanarvoiset (ekvivalentit) voimasysteemit Edellistä voimasysteemiä voidaan yksinkertaistaa edelleen muodostamalla pisteessä O vaikuttava resultanttivoima! " ja resultanttimomentti ($ " ) &.! " = Σ! =! ( +! * ($ " ) & = ($ & ) ( + ($ & ) * + $
32 Samanarvoiset (ekvivalentit) voimasysteemit Jos voimasysteemi vaikuttaa tasossa (2D), voi olla nopeampi määrittää ekvivalentti voimasysteemi käyttämällä skalaarimenetelmää: 1. Voimat x- ja y-akselin suuntaisiin komponentteihin, ja resultanttivoiman komponentit (" # ) % = Σ" % (" # ) ( = Σ" ( 2. Määritetään momentti (momentit) voimien komponenteista Jos voimasysteemi on kolmiulotteinen (3D), kannattaa aina laskea voimaresultantti karteesisilla vektoreilla ja momentti ristitulolla.
33 Esimerkki Määritä kuvan voimasysteemiä vastaava resultanttivoima ja resultanttimomentti pisteessä A. Tehtävän voimat tasossa, käytetään skalaarimenetelmää. Jaetaan kaikki voimat x- ja y-akselin suuntaisiin komponentteihin ja ratkaistaan resultanttivoima. B (0.3m) 5 +(0.4m) 5 = 0.5 m 100 N 0.4 m + (% & ) ( = Σ% ( = 200N + 100N = 140 N + (% & ) 7 = Σ% 7 = 150N + 100N = 70 N % & = (% & ( )5 +(% & 7 )5 = ( 140N) 5 +( 70N) 5 = 157N 0.3 m 0.3 m 200 N C 9 = tan => (% &) 7 70N = tan => (% & ) ( 140N = 26,6 150 N
34 Esimerkki Määritä kuvan voimasysteemiä vastaava resultanttivoima ja resultanttimomentti pisteessä A. 100 N Määritetään voimien momentit pisteen A ympäri = Σ3 5 = 150N 0.3m + 100N = 45 Nm + 48 Nm 24 Nm = 21 Nm 0.6m 100N (0.4m) - (0.3m) ' +(0.4m) ' = 0.5 m 0.4 m Pisteeseen A redusoitu ekvivalentti voimasysteemi = 21 Nm 0.3 m 0.3 m 200 N. 26, N : 4 = 157N

35 Samanarvoiset voimasysteemit Voimavektorit vaikuttavat saman pisteen kautta. Yhtyvässä voimasysteemissä kaikkien voimien vaikutussuorat leikkaavat yhdessä vaikutuspisteessä!. ei momenttia pisteessä!. Samanarvoinen voimasysteemi voidaan esittää resultanttivoimana pisteessä!.
36 Samanarvoiset voimasysteemit Voimavektorit vaikuttavat samassa tasossa. ($ % ) ' =!( %! = ($ % ) ' ( % Tasossa vaikuttavan voimasysteemin resultanttivoima on samassa tasossa, mutta voimaparin momentin resultantin (+ % ) ' suunta on tasoa vastaan kohtisuorassa. Voimaparin momentin resultantti voidaan korvata siirtämällä resultanttivoima momentin varren,!, matkan pisteestä,, jolloin resultanttivoima tuottaa saman momentin pisteen, ympäri.
 ' ( % Yhdensuuntainen voimasysteemi koostuu yhdensuuntaisista voimista voimaresultantti yhdensuuntainen ja voimaparin momentin resultantti on resultanttivoimaa kohtisuorassa ja")
37 Samanarvoiset voimasysteemit Voimavektorit ovat yhdensuuntaisia. ($ % ) ' =!( %! = ($ % ) ' ( % Yhdensuuntainen voimasysteemi koostuu yhdensuuntaisista voimista voimaresultantti yhdensuuntainen ja voimaparin momentin resultantti on resultanttivoimaa kohtisuorassa ja momenttiakselin + suuntainen. Voimasysteemiä voidaan yksinkertaistaa siirtämällä resultanttivoima pitkin +:ta vastaan kohtisuorassa olevalla --akselilla etäisyyden! päähän momenttiakselista +.
38 Esimerkki Kuvan voimasysteemi on mahdollista korvata yhdellä samanarvoisella resultanttivoimalla. Määritä sen vaikutussuoran x- ja y-koordinaatit. Kuvan voimasysteemi on yhdensuuntainen. Se voidaan sieventää yhdeksi resultanttivoimaksi. + # $ = 100N 500N 400N = 800N Resultanttivoiman paikka saadaan momenttitasapainoista x-akselin ja y-akselin ympäri. Resultanttivoiman momentti x-akselin ympäri on oltava yhtä suuri kuin voimasysteemin voimien aiheuttama momentti x-akselin ympäri. (. $ ) 0 = Σ N 4 = 400N 4m 500N(4m) 4 = 4,5 m
39 Esimerkki Kuvan voimasysteemi on mahdollista korvata yhdellä samanarvoisella resultanttivoimalla. Määritä sen vaikutussuoran x- ja y-koordinaatit. Kirjoitetaan momenttitasapainoyhtälö y-akselin ympäri ja määritetään resultanttivoiman x-koordinaatti: (" # ) % = Σ" % + 800N. = 100N 3m + 500N(4m). = 2,125 m Resultanttivoima 8 # = 800N pisteessä (2,125 m; 4,5 m) on samanarvoinen voimasysteemi. 8 # = 800N 4,5 m 2,125 m
40 Jakaantunut voima Paine: kuorma / pintalayksikkö Viivakuorma: kuorma / pituusyksikkö! =! # N/m ( )(#) =! #, N/m! = Pa = N/m (.
41 Jakaantunut voima Ajattelutapa: jakaantunut voima koostuu vierekkäisistä pienistä pistevoimista!", jotka vaikuttavat lyhyillä!%:n mittaisilla pätkillä.!" = $ %!% Resultanttivoima on kaikkien systeemin voimien summa + " ) = Σ!" " ) =,!" =, $ %!% Voima = viivakuorman jakaumakuvion pinta-ala A - =,!- ". ~ - Resultanttivoiman vaikutussuora kulkee jakaumakuvion painopisteen 0 kautta
42 Jakaantunut voima Voiman -/ aiheuttama momentti pisteen. suhteen +-/ = +, + -+ Jakaantuneen voiman momentti pisteen. suhteen (integroi hyvin pienet momentit yli kuorman pituuden) + $ % & = * +, + -+ Jakaantunut voima ja resultanttivoima jakaumakuvion painopisteen kautta ovat samanarvoisia voimasysteemejä + / % = * +, = * +, + -+ = * +, + -+ / % *, + -+ * +-2 * -2
 \" *\" \" = \") \" *\" ( = \") \" *\" ( $ % ( ) \" *\" ( \"*, ( *, (. % ) 0 = *$ % * = (.")
43 Jakaantunut voima Huomaa tapausten yhtäläisyys! Ensimmäisessä suuri määrä hyvin pieniä voimia. " $ % = ( ") " *" " = ") " *" ( = ") " *" ( $ % ( ) " *" ( "*, ( *, (. % ) 0 = *$ % * = (. % ) 0 $ %
44 Jakaantunut voima Jakaantuneen voiman jakaumakuvio on usein muodoltaan hyvin yksinkertainen, kuten suorakulmio, jolloin sen pinta-ala voidaan helposti laskea ilman integrointia.! 2 Tasainen jakaantunut kuorma " # vaikuttaa palkin pituudella b. Resultanttivoima vastaa kuormituskuvion pinta-alaa: $ % = " #!.! Resultanttivoima vaikuttaa kuormituskuvion painopisteessä, eli pituuden b puolivälissä.


45 Esimerkki Määritä resultanttivoima ja sen paikka suhteessa palkin tukeen pisteestä A. Resultanttivoiman suuruus vasta kuormituskuvion pinta-alaa. Jaetaan pinta-ala kahteen osaan (helpottaa laskentaa), ja lasketaan osien resultanttivoimat. Kolmio: + $ % = kn/m 4.5m = 6.75 kn Suorakaide: 3 kn/m 3 kn/m + $ 3 = 3 kn/m 6 m = 18 kn $ % $3 5 % 5 3 Resultanttivoimien vaikutussuorat kuvioiden painopisteiden kautta. 5 % = m = 1.5 m 5 3 = m = 3 m


46 Esimerkki Määritetään tehtävän kuormitustapaukselle resultanttivoiman paikka momenttitasapainon avulla. + 4 % 5 = Σ4 5 $ % 7 = $ ' 7 ' $ ( 7 ( kn = 6.75kN 1.5 m + 18 kn(3 m) 7= = 2.59 m Kahden jakaumakuvion resultanttivoimista saadaan koko kuormituksen resultantti. + $ % = $ ' + $ ( = 6.75 kn + 18 kn = kn

47 Yhteenveto Uusia käsitteitä: Samanarvoinen voimasysteemi Jakaantunut voima Voimasysteemien yksinkertaistukset Voimasysteemi redusoitiin samanarvoiseksi joko resultanttivoimaksi tai resultanttivoiman ja momentin resultantin pariksi. Jakautunut kuorma sievennettiin yhdeksi resultanttivoimaksi.
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 24.2.2016 Susanna Hurme Päivän aihe: Voiman momentin käsite (Kirjan luvut 4.1-4.6) Mikä on voiman momentti? Määritetään momentti skalaari- ja vektorimuodossa Opitaan
KJR-C1001 Statiikka ja dynamiikka Luento 24.2.2016 Susanna Hurme Päivän aihe: Voiman momentin käsite (Kirjan luvut 4.1-4.6) Mikä on voiman momentti? Määritetään momentti skalaari- ja vektorimuodossa Opitaan
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 25.2.2016 Susanna Hurme Päivän aihe: Voimasysteemien samanarvoisuus ja jakaantuneen voiman käsite (Kirjan luvut 4.7-4.9) Osaamistavoitteet: 1. Ymmärtää, mikä on
KJR-C1001 Statiikka ja dynamiikka Luento 25.2.2016 Susanna Hurme Päivän aihe: Voimasysteemien samanarvoisuus ja jakaantuneen voiman käsite (Kirjan luvut 4.7-4.9) Osaamistavoitteet: 1. Ymmärtää, mikä on
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 10.3.2016 Susanna Hurme Statiikan välikoe 14.3.2016 Ajankohta ma 14.3.2016 klo 14:15 17:15 Salijako Aalto-Sali: A-Q (sukunimen alkukirjaimen mukaan) Ilmoittautuminen
KJR-C1001 Statiikka ja dynamiikka Luento 10.3.2016 Susanna Hurme Statiikan välikoe 14.3.2016 Ajankohta ma 14.3.2016 klo 14:15 17:15 Salijako Aalto-Sali: A-Q (sukunimen alkukirjaimen mukaan) Ilmoittautuminen
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 23.2.2016 Susanna Hurme Tervetuloa kurssille! Mitä on statiikka? Mitä on dynamiikka? Miksi niitä opiskellaan? Päivän aihe: Voiman käsite ja partikkelin tasapaino
KJR-C1001 Statiikka ja dynamiikka Luento 23.2.2016 Susanna Hurme Tervetuloa kurssille! Mitä on statiikka? Mitä on dynamiikka? Miksi niitä opiskellaan? Päivän aihe: Voiman käsite ja partikkelin tasapaino
KJR-C1001: Statiikka L5 Luento : Palkin normaali- ja leikkausvoima sekä taivutusmomentti
 KJR-C1001: Statiikka L5 Luento : Palkin normaali- ja leikkausvoima sekä taivutusmomentti Apulaisprofessori Konetekniikan laitos Statiikan välikoe 12.3.2018 Ajankohta ma 12.3.2018 klo 14:00 17:00 Salijako
KJR-C1001: Statiikka L5 Luento : Palkin normaali- ja leikkausvoima sekä taivutusmomentti Apulaisprofessori Konetekniikan laitos Statiikan välikoe 12.3.2018 Ajankohta ma 12.3.2018 klo 14:00 17:00 Salijako
KJR-C1001: Statiikka L3 Luento : Jäykän kappaleen tasapaino
 KJR-C1001: Statiikka L3 Luento 27.2.2018: Jäykän kappaleen tasapaino Apulaisprofessori Konetekniikan laitos Luennon osaamistavoitteet Tämän päiväisen luennon (ja laskuharjoitusten) jälkeen opiskelija
KJR-C1001: Statiikka L3 Luento 27.2.2018: Jäykän kappaleen tasapaino Apulaisprofessori Konetekniikan laitos Luennon osaamistavoitteet Tämän päiväisen luennon (ja laskuharjoitusten) jälkeen opiskelija
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 1.3.2016 Susanna Hurme Päivän aihe: Jäykän kappaleen tasapaino ja vapaakappalekuva (Kirjan luvut 5.1-5.4) Osaamistavoitteet: 1. Ymmärtää, mitä tukireaktiot ovat
KJR-C1001 Statiikka ja dynamiikka Luento 1.3.2016 Susanna Hurme Päivän aihe: Jäykän kappaleen tasapaino ja vapaakappalekuva (Kirjan luvut 5.1-5.4) Osaamistavoitteet: 1. Ymmärtää, mitä tukireaktiot ovat
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 2.3.2016 Susanna Hurme äivän aihe: Staattisesti määrätyn rakenteen tukireaktiot (Kirjan luvut 5.7 ja 6.6) Osaamistavoitteet: Ymmärtää, mitä tarkoittaa staattisesti
KJR-C1001 Statiikka ja dynamiikka Luento 2.3.2016 Susanna Hurme äivän aihe: Staattisesti määrätyn rakenteen tukireaktiot (Kirjan luvut 5.7 ja 6.6) Osaamistavoitteet: Ymmärtää, mitä tarkoittaa staattisesti
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 8.3.2016 Susanna Hurme Päivän aihe: Normaalivoiman, leikkausvoiman ja taivutusmomentin käsitteet (Kirjan luku 7.1) Osaamistavoitteet: Ymmärtää, millaisia sisäisiä
KJR-C1001 Statiikka ja dynamiikka Luento 8.3.2016 Susanna Hurme Päivän aihe: Normaalivoiman, leikkausvoiman ja taivutusmomentin käsitteet (Kirjan luku 7.1) Osaamistavoitteet: Ymmärtää, millaisia sisäisiä
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 9.3.2016 Susanna Hurme Päivän aihe: Palkin leikkausvoima- ja taivutusmomenttijakaumat ja kuviot (Kirjan luvut 7.2 ja 7.3) Osaamistavoitteet: Ymmärtää, miten leikkausvoima
KJR-C1001 Statiikka ja dynamiikka Luento 9.3.2016 Susanna Hurme Päivän aihe: Palkin leikkausvoima- ja taivutusmomenttijakaumat ja kuviot (Kirjan luvut 7.2 ja 7.3) Osaamistavoitteet: Ymmärtää, miten leikkausvoima
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 16.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinetiikka (Kirjan luvut 12.6, 13.1-13.3 ja 17.3) Oppimistavoitteet Ymmärtää, miten Newtonin toisen lain
KJR-C1001 Statiikka ja dynamiikka Luento 16.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinetiikka (Kirjan luvut 12.6, 13.1-13.3 ja 17.3) Oppimistavoitteet Ymmärtää, miten Newtonin toisen lain
VEKTORIT paikkavektori OA
 paikkavektori OA Piste A = (2, -1) Paikkavektori OA = 2i j 3D: kuvan piirtäminen hankalaa Piste A = (2, -3, 4) Paikkavektori OA = 2i 3j + 4k Piste A = (a 1, a 2, a 3 ) Paikkavektori OA = a 1 i + a 2 j
paikkavektori OA Piste A = (2, -1) Paikkavektori OA = 2i j 3D: kuvan piirtäminen hankalaa Piste A = (2, -3, 4) Paikkavektori OA = 2i 3j + 4k Piste A = (a 1, a 2, a 3 ) Paikkavektori OA = a 1 i + a 2 j
9. Vektorit. 9.1 Skalaarit ja vektorit. 9.2 Vektorit tasossa
 9. Vektorit 9.1 Skalaarit ja vektorit Skalaari on koon tai määrän mitta. Tyypillinen esimerkki skalaarista on massa. Lukumäärä on toinen hyvä esimerkki skalaarista. Vektorilla on taas suuruus ja suunta.
9. Vektorit 9.1 Skalaarit ja vektorit Skalaari on koon tai määrän mitta. Tyypillinen esimerkki skalaarista on massa. Lukumäärä on toinen hyvä esimerkki skalaarista. Vektorilla on taas suuruus ja suunta.
A B = (1, q, q 2 ) (2, 0, 2) = 2 2q q 2 = 0 q 2 = 1 q = ±1 A(±1) = (1, ±1, 1) A(1) A( 1) = (1, 1, 1) (1, 1, 1) = A( 1) A(1) A( 1) = 1
 (2, 0, 2) = 2 2q q 2 = 0 q 2 = 1 q = ±1 A(±1) = (1, ±1, 1) A(1) A( 1) = (1, 1, 1) (1, 1, 1) = A( 1) A(1) A( 1) = 1") Mapu I Viikko 4 tehtävä malli Millä q:n arvoilla vektori A(q) (, q, q ) on kohtisuora vektorin B (, 0, ) kanssa? Ovatko A:n eri ratkaisut keskenään kohtisuoria? Jos eivät, määrää niiden välinen kulma!
Mapu I Viikko 4 tehtävä malli Millä q:n arvoilla vektori A(q) (, q, q ) on kohtisuora vektorin B (, 0, ) kanssa? Ovatko A:n eri ratkaisut keskenään kohtisuoria? Jos eivät, määrää niiden välinen kulma!
RTEK-2000 Statiikan perusteet. 1. välikoe ke LUENTOSALEISSA K1705 klo 11:00-14:00 sekä S4 klo 11:15-14:15 S4 on sähkötalossa
 RTEK-2000 Statiikan perusteet 1. välikoe ke 27.2. LUENTOSALEISSA K1705 klo 11:00-14:00 sekä S4 klo 11:15-14:15 S4 on sähkötalossa RTEK-2000 Statiikan perusteet 4 op 1. välikoealue luennot 21.2. asti harjoitukset
RTEK-2000 Statiikan perusteet 1. välikoe ke 27.2. LUENTOSALEISSA K1705 klo 11:00-14:00 sekä S4 klo 11:15-14:15 S4 on sähkötalossa RTEK-2000 Statiikan perusteet 4 op 1. välikoealue luennot 21.2. asti harjoitukset
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys102 Kevät 2010 Jukka Maalampi LUENTO 2-3 Vääntömomentti Oletus: Voimat tasossa, joka on kohtisuorassa pyörimisakselia vastaan. Oven kääntämiseen tarvitaan eri suuruinen voima
Mekaniikan jatkokurssi Fys102 Kevät 2010 Jukka Maalampi LUENTO 2-3 Vääntömomentti Oletus: Voimat tasossa, joka on kohtisuorassa pyörimisakselia vastaan. Oven kääntämiseen tarvitaan eri suuruinen voima
2.3 Voiman jakaminen komponentteihin
 Seuraavissa kappaleissa tarvitaan aina silloin tällöin taitoa jakaa voima komponentteihin sekä myös taitoa suorittaa sille vastakkainen operaatio eli voimien resultantin eli kokonaisvoiman laskeminen.
Seuraavissa kappaleissa tarvitaan aina silloin tällöin taitoa jakaa voima komponentteihin sekä myös taitoa suorittaa sille vastakkainen operaatio eli voimien resultantin eli kokonaisvoiman laskeminen.
Ristitulolle saadaan toinen muistisääntö determinantin avulla. Vektoreiden v ja w ristitulo saadaan laskemalla determinantti
 14 Ristitulo Avaruuden R 3 vektoreille voidaan määritellä pistetulon lisäksi niin kutsuttu ristitulo. Pistetulosta poiketen ristitulon tulos ei ole reaaliluku vaan avaruuden R 3 vektori. Ristitulosta on
14 Ristitulo Avaruuden R 3 vektoreille voidaan määritellä pistetulon lisäksi niin kutsuttu ristitulo. Pistetulosta poiketen ristitulon tulos ei ole reaaliluku vaan avaruuden R 3 vektori. Ristitulosta on
Vektoreiden A = (A1, A 2, A 3 ) ja B = (B1, B 2, B 3 ) pistetulo on. Edellisestä seuraa
 ja B = (B1, B 2, B 3 ) pistetulo on. Edellisestä seuraa") Viikon aiheet Pistetulo (skalaaritulo Vektorien tulot Pistetulo Ristitulo Skalaari- ja vektorikolmitulo Integraalifunktio, alkeisfunktioiden integrointi, yhdistetyn funktion derivaatan integrointi Vektoreiden
Viikon aiheet Pistetulo (skalaaritulo Vektorien tulot Pistetulo Ristitulo Skalaari- ja vektorikolmitulo Integraalifunktio, alkeisfunktioiden integrointi, yhdistetyn funktion derivaatan integrointi Vektoreiden
Vektorien pistetulo on aina reaaliluku. Esimerkiksi vektorien v = (3, 2, 0) ja w = (1, 2, 3) pistetulo on
 ja w = (1, 2, 3) pistetulo on") 13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
Vektorialgebra 1/5 Sisältö ESITIEDOT: vektori
 Vektorialgebra 1/5 Sisältö Skalaaritulo Vektoreiden yhteenlaskun ja skalaarilla kertomisen lisäksi vektoreiden välille voidaan määritellä myös kertolasku. Itse asiassa näitä on kaksi erilaista. Seurauksena
Vektorialgebra 1/5 Sisältö Skalaaritulo Vektoreiden yhteenlaskun ja skalaarilla kertomisen lisäksi vektoreiden välille voidaan määritellä myös kertolasku. Itse asiassa näitä on kaksi erilaista. Seurauksena
STATIIKKA. TF00BN89 5op
 STATIIKKA TF00BN89 5op Sisältö: Statiikan peruslait Voiman resultantti ja jako komponentteihin Voiman momentti ja voimapari Partikkelin ja jäykän kappaleen tasapainoyhtälöt Tukivoimat Ristikot, palkit
STATIIKKA TF00BN89 5op Sisältö: Statiikan peruslait Voiman resultantti ja jako komponentteihin Voiman momentti ja voimapari Partikkelin ja jäykän kappaleen tasapainoyhtälöt Tukivoimat Ristikot, palkit
Suora. Määritelmä. Oletetaan, että n = 2 tai n = 3. Avaruuden R n suora on joukko. { p + t v t R},
 Määritelmä Suora Oletetaan, että n = 2 tai n = 3. Avaruuden R n suora on joukko { p + t v t R}, missä p, v R n ja v 0. Tässä p on suoran jonkin pisteen paikkavektori ja v on suoran suuntavektori. v p LM1,
Määritelmä Suora Oletetaan, että n = 2 tai n = 3. Avaruuden R n suora on joukko { p + t v t R}, missä p, v R n ja v 0. Tässä p on suoran jonkin pisteen paikkavektori ja v on suoran suuntavektori. v p LM1,
Voima F tekee työtä W vaikuttaessaan kappaleeseen, joka siirtyy paikasta r 1 paikkaan r 2. Työ on skalaarisuure, EI vektori!
 6.1 Työ Voima F tekee työtä W vaikuttaessaan kappaleeseen, joka siirtyy paikasta r 1 paikkaan r 2. Työ on skalaarisuure, EI vektori! Siirtymä s = r 2 r 1 Kun voiman kohteena olevaa kappaletta voidaan kuvata
6.1 Työ Voima F tekee työtä W vaikuttaessaan kappaleeseen, joka siirtyy paikasta r 1 paikkaan r 2. Työ on skalaarisuure, EI vektori! Siirtymä s = r 2 r 1 Kun voiman kohteena olevaa kappaletta voidaan kuvata
Havainnollistuksia: Merkitään w = ( 4, 3) ja v = ( 3, 2). Tällöin. w w = ( 4) 2 + ( 3) 2 = 25 = 5. v = ( 3) = 13. v = v.
 ja v = ( 3, 2). Tällöin. w w = ( 4) 2 + ( 3) 2 = 25 = 5. v = ( 3) = 13. v = v.") Havainnollistuksia: Merkitään w = ( 4, 3) ja v = ( 3, 2). Tällöin w = w w = ( 4) 2 + ( 3) 2 = 25 = 5 v = v v = ( 3) 2 + 2 2 = 13. w =5 3 2 v = 13 4 3 LM1, Kesä 2014 76/102 Normin ominaisuuksia I Lause
Havainnollistuksia: Merkitään w = ( 4, 3) ja v = ( 3, 2). Tällöin w = w w = ( 4) 2 + ( 3) 2 = 25 = 5 v = v v = ( 3) 2 + 2 2 = 13. w =5 3 2 v = 13 4 3 LM1, Kesä 2014 76/102 Normin ominaisuuksia I Lause
Tekijä Pitkä matematiikka b) Kuvasta nähdään, että b = i 4 j. c) Käytetään a- ja b-kohtien tuloksia ja muokataan lauseketta.
 Kuvasta nähdään, että b = i 4 j. c) Käytetään a- ja b-kohtien tuloksia ja muokataan lauseketta.") Tekijä Pitkä matematiikka 4 9.1.016 79 a) Kuvasta nähdään, että a = 3i + j. b) Kuvasta nähdään, että b = i 4 j. c) Käytetään a- ja b-kohtien tuloksia ja muokataan lauseketta. 5a b = 5(3i + j) ( i 4 j)
Tekijä Pitkä matematiikka 4 9.1.016 79 a) Kuvasta nähdään, että a = 3i + j. b) Kuvasta nähdään, että b = i 4 j. c) Käytetään a- ja b-kohtien tuloksia ja muokataan lauseketta. 5a b = 5(3i + j) ( i 4 j)
Tekijä Pitkä matematiikka Poistetaan yhtälöparista muuttuja s ja ratkaistaan muuttuja r.
 Tekijä Pitkä matematiikka 4 16.12.2016 K1 Poistetaan yhtälöparista muuttuja s ja ratkaistaan muuttuja r. 3 r s = 0 4 r+ 4s = 2 12r 4s = 0 + r+ 4s = 2 13 r = 2 r = 2 13 2 Sijoitetaan r = esimerkiksi yhtälöparin
Tekijä Pitkä matematiikka 4 16.12.2016 K1 Poistetaan yhtälöparista muuttuja s ja ratkaistaan muuttuja r. 3 r s = 0 4 r+ 4s = 2 12r 4s = 0 + r+ 4s = 2 13 r = 2 r = 2 13 2 Sijoitetaan r = esimerkiksi yhtälöparin
Voimapari ja sen momentti
 Rakenteiden Mekaniikka Vol. 49, Nro, 06, s. 78-55 rmseura.tkk.fi/rmlehti/ Kirjoittajat 06. Vapaasti saatavilla CC BY-SA 4.0 lisensioitu. Voimapari ja sen momentti Tapio Salmi Tiivistelmä. Artikkelissa
Rakenteiden Mekaniikka Vol. 49, Nro, 06, s. 78-55 rmseura.tkk.fi/rmlehti/ Kirjoittajat 06. Vapaasti saatavilla CC BY-SA 4.0 lisensioitu. Voimapari ja sen momentti Tapio Salmi Tiivistelmä. Artikkelissa
Lineaarialgebra MATH.1040 / voima
 Lineaarialgebra MATH.1040 / voima 1 Seuraavaksi määrittelemme kaksi vektoreille määriteltyä tuloa; pistetulo ja. Määritelmät ja erilaiset tulojen ominaisuudet saattavat tuntua, sekavalta kokonaisuudelta.
Lineaarialgebra MATH.1040 / voima 1 Seuraavaksi määrittelemme kaksi vektoreille määriteltyä tuloa; pistetulo ja. Määritelmät ja erilaiset tulojen ominaisuudet saattavat tuntua, sekavalta kokonaisuudelta.
Juuri 4 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty Kertaus. b) B = (3, 0, 5) K2. ( )
 B = (3, 0, 5) K2. ( )") Kertaus K1. a) OA =- i + j + k K. b) B = (, 0, 5) K. a) AB = (6 -(- )) i + ( - ) j + (- -(- 7)) k = 8i - j + 4k AB = 8 + (- 1) + 4 = 64+ 1+ 16 = 81= 9 b) 1 1 ( ) AB = (--(- 1)) i + - - 1 j =-i - 4j AB
Kertaus K1. a) OA =- i + j + k K. b) B = (, 0, 5) K. a) AB = (6 -(- )) i + ( - ) j + (- -(- 7)) k = 8i - j + 4k AB = 8 + (- 1) + 4 = 64+ 1+ 16 = 81= 9 b) 1 1 ( ) AB = (--(- 1)) i + - - 1 j =-i - 4j AB
Suorista ja tasoista LaMa 1 syksyllä 2009
 Viidennen viikon luennot Suorista ja tasoista LaMa 1 syksyllä 2009 Perustuu kirjan Poole: Linear Algebra lukuihin I.3 - I.4 Esko Turunen esko.turunen@tut.fi Aluksi hiukan 2 ja 3 ulotteisen reaaliavaruuden
Viidennen viikon luennot Suorista ja tasoista LaMa 1 syksyllä 2009 Perustuu kirjan Poole: Linear Algebra lukuihin I.3 - I.4 Esko Turunen esko.turunen@tut.fi Aluksi hiukan 2 ja 3 ulotteisen reaaliavaruuden
Kertausosa. 5. Merkitään sädettä kirjaimella r. Kaaren pituus on tällöin r a) sin = 0, , c) tan = 0,
 sin = 0, , c) tan = 0,") Kertausosa. a),6 60 576 Peruuttaessa pyörähdyssuunta on vastapäivään. Kulma on siis,4 60 864 a) 576 864 0,88m. a) α b 0,6769... 0,68 (rad) r,m 8cm β,90...,9 (rad) 4cm a) α 0,68 (rad) β,9 (rad). a) 5,0
Kertausosa. a),6 60 576 Peruuttaessa pyörähdyssuunta on vastapäivään. Kulma on siis,4 60 864 a) 576 864 0,88m. a) α b 0,6769... 0,68 (rad) r,m 8cm β,90...,9 (rad) 4cm a) α 0,68 (rad) β,9 (rad). a) 5,0
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
y=-3x+2 y=2x-3 y=3x+2 x = = 6
 MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
1.1 Vektorit. MS-A0007 Matriisilaskenta. 1.1 Vektorit. 1.1 Vektorit. Reaalinen n-ulotteinen avaruus on joukko. x 1. R n. 1. Vektorit ja kompleksiluvut
 ja kompleksiluvut ja kompleksiluvut 1.1 MS-A0007 Matriisilaskenta 1. ja kompleksiluvut Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 26.10.2015 Reaalinen
ja kompleksiluvut ja kompleksiluvut 1.1 MS-A0007 Matriisilaskenta 1. ja kompleksiluvut Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 26.10.2015 Reaalinen
Tekijä Pitkä matematiikka Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4).
, ( 2,1), (1, 0), (4, 1) ja ( 11, 4).") Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 3.3.2016 Susanna Hurme Päivän aihe: Ristikon sauvavoimat (Kirjan luvut 6.1-6.4) Osaamistavoitteet: Ymmärtää, mikä on ristikkorakenne Osata soveltaa aiemmin kurssilla
KJR-C1001 Statiikka ja dynamiikka Luento 3.3.2016 Susanna Hurme Päivän aihe: Ristikon sauvavoimat (Kirjan luvut 6.1-6.4) Osaamistavoitteet: Ymmärtää, mikä on ristikkorakenne Osata soveltaa aiemmin kurssilla
Voiman momentti M. Liikemäärä, momentti, painopiste. Momentin määritelmä. Laajennettu tasapainon käsite. Osa 4
 Osa 4 Liikemäärä, momentti, painopiste Voiman momentti M Voiman vääntövaikutusta mittaava suure on momentti. Esim. automerkkien esitteissä on mainittu moottorin momentti ("vääntö"). Moottorin antama voima
Osa 4 Liikemäärä, momentti, painopiste Voiman momentti M Voiman vääntövaikutusta mittaava suure on momentti. Esim. automerkkien esitteissä on mainittu moottorin momentti ("vääntö"). Moottorin antama voima
SUORAN PALKIN TAIVUTUS
 SUORAN PALKIN TAIVUTUS KERTAUSTA! Palkin rasituslajit Palkki tasossa: Tasopalkin rasitukset, sisäiset voimat, ovat normaalivoima N, leikkausvoima Q ja taivutusmomentti M t. Ne voidaan isostaattisessa rakenteessa
SUORAN PALKIN TAIVUTUS KERTAUSTA! Palkin rasituslajit Palkki tasossa: Tasopalkin rasitukset, sisäiset voimat, ovat normaalivoima N, leikkausvoima Q ja taivutusmomentti M t. Ne voidaan isostaattisessa rakenteessa
Mb8 Koe Kuopion Lyseon lukio (KK) sivu 1/3
 sivu 1/3") Mb8 Koe 4.11.015 Kuopion Lyseon lukio (KK) sivu 1/3 Kokeessa on kaksi osaa. Osa A ratkaistaan tehtäväpaperille ja osa B ratkaistaan konseptipaperille. Osa A: saat käyttää taulukkokirjaa mutta et laskinta.
Mb8 Koe 4.11.015 Kuopion Lyseon lukio (KK) sivu 1/3 Kokeessa on kaksi osaa. Osa A ratkaistaan tehtäväpaperille ja osa B ratkaistaan konseptipaperille. Osa A: saat käyttää taulukkokirjaa mutta et laskinta.
0, niin vektorit eivät ole kohtisuorassa toisiaan vastaan.
 Tekijä Pitkä matematiikka 4 9.1.016 168 a) Lasketaan vektorien a ja b pistetulo. a b = (3i + 5 j) (7i 3 j) = 3 7 + 5 ( 3) = 1 15 = 6 Koska pistetulo a b 0, niin vektorit eivät ole kohtisuorassa toisiaan
Tekijä Pitkä matematiikka 4 9.1.016 168 a) Lasketaan vektorien a ja b pistetulo. a b = (3i + 5 j) (7i 3 j) = 3 7 + 5 ( 3) = 1 15 = 6 Koska pistetulo a b 0, niin vektorit eivät ole kohtisuorassa toisiaan
Pistetulo eli skalaaritulo
 Pistetulo eli skalaaritulo VEKTORIT, MAA4 Pistetulo on kahden vektorin välinen tulo. Tarkastellaan ensin kahden vektorin välistä kulmaa. Vektorien a ja, kun a 0, välinen kulma on (kuva) kovera kun a vektorit
Pistetulo eli skalaaritulo VEKTORIT, MAA4 Pistetulo on kahden vektorin välinen tulo. Tarkastellaan ensin kahden vektorin välistä kulmaa. Vektorien a ja, kun a 0, välinen kulma on (kuva) kovera kun a vektorit
TÄSSÄ ON ESIMERKKEJÄ SÄHKÖ- JA MAGNETISMIOPIN KEVÄÄN 2017 MATERIAALISTA
 TÄSSÄ ON ESMERKKEJÄ SÄHKÖ- JA MAGNETSMOPN KEVÄÄN 2017 MATERAALSTA a) Määritetään magneettikentän voimakkuus ja suunta q P = +e = 1,6022 10 19 C, v P = (1500 m s ) i, F P = (2,25 10 16 N)j q E = e = 1,6022
TÄSSÄ ON ESMERKKEJÄ SÄHKÖ- JA MAGNETSMOPN KEVÄÄN 2017 MATERAALSTA a) Määritetään magneettikentän voimakkuus ja suunta q P = +e = 1,6022 10 19 C, v P = (1500 m s ) i, F P = (2,25 10 16 N)j q E = e = 1,6022
A-osio. Tehdään ilman laskinta ja taulukkokirjaa! Valitse tehtävistä A1-A3 kaksi ja vastaa niihin. Maksimissaan tunti aikaa suorittaa A-osiota.
 MAA5.2 Loppukoe 24.9.2013 Jussi Tyni Valitse 6 tehtävää Muista merkitä vastauspaperiin oma nimesi ja tee etusivulle pisteytysruudukko Kaikkiin tehtävien ratkaisuihin välivaiheet näkyviin! A1. A-osio. Tehdään
MAA5.2 Loppukoe 24.9.2013 Jussi Tyni Valitse 6 tehtävää Muista merkitä vastauspaperiin oma nimesi ja tee etusivulle pisteytysruudukko Kaikkiin tehtävien ratkaisuihin välivaiheet näkyviin! A1. A-osio. Tehdään
DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi
 Arttu Polojärvi") DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Suhteellisen liikkeen nopeuden ja kiihtyvyyden yhtälöt. Jäykän kappaleen partikkelin liike. Jäykän
DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Suhteellisen liikkeen nopeuden ja kiihtyvyyden yhtälöt. Jäykän kappaleen partikkelin liike. Jäykän
2 Pistejoukko koordinaatistossa
 Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 29.3.2016 Susanna Hurme Yleisen tasoliikkeen kinematiikka: absoluuttinen ja suhteellinen liike, rajoitettu liike (Kirjan luvut 16.4-16.7) Osaamistavoitteet Ymmärtää,
KJR-C1001 Statiikka ja dynamiikka Luento 29.3.2016 Susanna Hurme Yleisen tasoliikkeen kinematiikka: absoluuttinen ja suhteellinen liike, rajoitettu liike (Kirjan luvut 16.4-16.7) Osaamistavoitteet Ymmärtää,
Vektorin paikalla avaruudessa ei ole merkitystä. Esimerkiksi yllä olevassa kuvassa kaikki kolme vektoria ovat samoja, ts.
 49 3 VEKTORIT 3.1 VEKTORIN KÄSITE Vektori on suure, jolla suuruuden lisäksi on myös suunta (esim. kiihtyvyys). Skalaari puolestaan on suure, jolla on vain suuruus (esim. tiheys). Vektori graafisesti: Vektorin
49 3 VEKTORIT 3.1 VEKTORIN KÄSITE Vektori on suure, jolla suuruuden lisäksi on myös suunta (esim. kiihtyvyys). Skalaari puolestaan on suure, jolla on vain suuruus (esim. tiheys). Vektori graafisesti: Vektorin
RATKAISUT: 19. Magneettikenttä
 Physica 9 1. painos 1(6) : 19.1 a) Magneettivuo määritellään kaavalla Φ =, jossa on magneettikenttää vastaan kohtisuorassa olevan pinnan pinta-ala ja on magneettikentän magneettivuon tiheys, joka läpäisee
Physica 9 1. painos 1(6) : 19.1 a) Magneettivuo määritellään kaavalla Φ =, jossa on magneettikenttää vastaan kohtisuorassa olevan pinnan pinta-ala ja on magneettikentän magneettivuon tiheys, joka läpäisee
Tekijä Pitkä matematiikka On osoitettava, että jana DE sivun AB kanssa yhdensuuntainen ja sen pituus on 4 5
 Tekijä Pitkä matematiikka 6..06 8 On osoitettava, että jana DE sivun AB kanssa yhdensuuntainen ja sen pituus on 5 sivun AB pituudesta. Pitää siis osoittaa, että DE = AB. 5 Muodostetaan vektori DE. DE =
Tekijä Pitkä matematiikka 6..06 8 On osoitettava, että jana DE sivun AB kanssa yhdensuuntainen ja sen pituus on 5 sivun AB pituudesta. Pitää siis osoittaa, että DE = AB. 5 Muodostetaan vektori DE. DE =
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 23.3.2016 Susanna Hurme Rotaatioliikkeen kinetiikka: hitausmomentti ja liikeyhtälöt (Kirjan luvut 17.1, 17.2 ja 17.4) Osaamistavoitteet Ymmärtää hitausmomentin
KJR-C1001 Statiikka ja dynamiikka Luento 23.3.2016 Susanna Hurme Rotaatioliikkeen kinetiikka: hitausmomentti ja liikeyhtälöt (Kirjan luvut 17.1, 17.2 ja 17.4) Osaamistavoitteet Ymmärtää hitausmomentin
MAA15 Vektorilaskennan jatkokurssi, tehtävämoniste
 MAA15 Vektorilaskennan jatkokurssi, tehtävämoniste Tason ja avaruuden vektorit 1. Olkoon A(, -, 4) ja B(5, -1, -3). a) Muodosta pisteen A paikkavektori. b) Muodosta vektori AB. c) Laske vektorin AB pituus.
MAA15 Vektorilaskennan jatkokurssi, tehtävämoniste Tason ja avaruuden vektorit 1. Olkoon A(, -, 4) ja B(5, -1, -3). a) Muodosta pisteen A paikkavektori. b) Muodosta vektori AB. c) Laske vektorin AB pituus.
Luento 10: Työ, energia ja teho. Johdanto Työ ja kineettinen energia Teho
 Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho 1 / 23 Luennon sisältö Johdanto Työ ja kineettinen energia Teho 2 / 23 Johdanto Energia suure, joka voidaan muuttaa muodosta toiseen,
Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho 1 / 23 Luennon sisältö Johdanto Työ ja kineettinen energia Teho 2 / 23 Johdanto Energia suure, joka voidaan muuttaa muodosta toiseen,
1.1 Vektorit. MS-A0004/A0006 Matriisilaskenta. 1.1 Vektorit. 1.1 Vektorit. Reaalinen n-ulotteinen avaruus on joukko. x 1. R n.
 ja kompleksiluvut ja kompleksiluvut 1.1 MS-A0004/A0006 Matriisilaskenta 1. ja kompleksiluvut Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 8.9.015 Reaalinen
ja kompleksiluvut ja kompleksiluvut 1.1 MS-A0004/A0006 Matriisilaskenta 1. ja kompleksiluvut Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 8.9.015 Reaalinen
RAK Statiikka 4 op
 RAK-31000 Statiikka 4 op Opintojakson kotisivu on osoitteessa: http://webhotel2.tut.fi/mec_tme harjoitukset (H) harjoitusten malliratkaisut harjoitustyöt (HT) ja opasteet ilmoitusasiat RAK-31000 Statiikka
RAK-31000 Statiikka 4 op Opintojakson kotisivu on osoitteessa: http://webhotel2.tut.fi/mec_tme harjoitukset (H) harjoitusten malliratkaisut harjoitustyöt (HT) ja opasteet ilmoitusasiat RAK-31000 Statiikka
normaali- ja leikkaus jännitysten laskemiseen pisteessä Määritetään ne tasot, joista suurimmat normaali- ja leikkausjännitykset löytyvät
 TAVOITTEET Johdetaan htälöt, joilla muutetaan jännitskomponentit koordinaatistosta toiseen Kätetään muunnoshtälöitä suurimpien normaali- ja leikkaus jännitsten laskemiseen pisteessä Määritetään ne tasot,
TAVOITTEET Johdetaan htälöt, joilla muutetaan jännitskomponentit koordinaatistosta toiseen Kätetään muunnoshtälöitä suurimpien normaali- ja leikkaus jännitsten laskemiseen pisteessä Määritetään ne tasot,
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 24.3.2016 Susanna Hurme Rotaatioliikkeen liike-energia, teho ja energiaperiaate (Kirjan luku 18) Osaamistavoitteet Ymmärtää, miten liike-energia määritetään kiinteän
KJR-C1001 Statiikka ja dynamiikka Luento 24.3.2016 Susanna Hurme Rotaatioliikkeen liike-energia, teho ja energiaperiaate (Kirjan luku 18) Osaamistavoitteet Ymmärtää, miten liike-energia määritetään kiinteän
Ortogonaaliset matriisit, määritelmä 1
 , määritelmä 1 Määritelmä (a). Neliömatriisi Q on ortogonaalinen, jos Q T Q = I. Määritelmästä voidaan antaa samaa tarkoittavat, mutta erilaiselta näyttävät muodot: Määritelmä (b). n n neliömatriisi Q,
, määritelmä 1 Määritelmä (a). Neliömatriisi Q on ortogonaalinen, jos Q T Q = I. Määritelmästä voidaan antaa samaa tarkoittavat, mutta erilaiselta näyttävät muodot: Määritelmä (b). n n neliömatriisi Q,
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 30.3.2016 Susanna Hurme Yleisen tasoliikkeen kinetiikka (Kirjan luku 17.5) Osaamistavoitteet Osata ratkaista voimia ja niiden aiheuttamia kiihtyvyyksiä tasoliikkeessä
KJR-C1001 Statiikka ja dynamiikka Luento 30.3.2016 Susanna Hurme Yleisen tasoliikkeen kinetiikka (Kirjan luku 17.5) Osaamistavoitteet Osata ratkaista voimia ja niiden aiheuttamia kiihtyvyyksiä tasoliikkeessä
Määritetään vääntökuormitetun sauvan kiertymä kimmoisella kuormitusalueella Tutkitaan staattisesti määräämättömiä vääntösauvoja
 TAVOITTEET Tutkitaan väännön vaikutusta suoraan sauvaan Määritetään vääntökuormitetun sauvan jännitysjakauma Määritetään vääntökuormitetun sauvan kiertymä kimmoisella kuormitusalueella Tutkitaan staattisesti
TAVOITTEET Tutkitaan väännön vaikutusta suoraan sauvaan Määritetään vääntökuormitetun sauvan jännitysjakauma Määritetään vääntökuormitetun sauvan kiertymä kimmoisella kuormitusalueella Tutkitaan staattisesti
Sähkövirran määrittelylausekkeesta
 VRTAPRLASKUT kysyttyjä suureita ovat mm. virrat, potentiaalit, jännitteet, resistanssit, energian- ja tehonkulutus virtapiirin teho lasketaan Joulen laista: P = R 2 sovelletaan Kirchhoffin sääntöjä tuntemattomien
VRTAPRLASKUT kysyttyjä suureita ovat mm. virrat, potentiaalit, jännitteet, resistanssit, energian- ja tehonkulutus virtapiirin teho lasketaan Joulen laista: P = R 2 sovelletaan Kirchhoffin sääntöjä tuntemattomien
SUORAN PALKIN RASITUKSET
 SUORAN PALKIN RASITUKSET Palkilla tarkoitetaan pitkänomaista rakenneosaa, jota voidaan käsitellä yksiulotteisena eli viivamaisena. Palkkia kuormitetaan pääasiassa poikittaisilla kuormituksilla, mutta usein
SUORAN PALKIN RASITUKSET Palkilla tarkoitetaan pitkänomaista rakenneosaa, jota voidaan käsitellä yksiulotteisena eli viivamaisena. Palkkia kuormitetaan pääasiassa poikittaisilla kuormituksilla, mutta usein
RTEK-2000 Statiikan perusteet 4 op
 RTEK-2000 Statiikan perusteet 4 op Opintojakson kotisivu on osoitteessa: http://webhotel2.tut.fi/mec_tme harjoitukset (H) harjoitusten malliratkaisut harjoitustyöt (HT) ja opasteet ilmoitusasiat Osaamistavoitteet
RTEK-2000 Statiikan perusteet 4 op Opintojakson kotisivu on osoitteessa: http://webhotel2.tut.fi/mec_tme harjoitukset (H) harjoitusten malliratkaisut harjoitustyöt (HT) ja opasteet ilmoitusasiat Osaamistavoitteet
Suora 1/5 Sisältö ESITIEDOT: vektori, koordinaatistot, piste
 Suora 1/5 Sisältö KATSO MYÖS:, vektorialgebra, geometriset probleemat, taso Suora geometrisena peruskäsitteenä Pisteen ohella suora on geometrinen peruskäsite, jota varsinaisesti ei määritellä. Alkeisgeometriassa
Suora 1/5 Sisältö KATSO MYÖS:, vektorialgebra, geometriset probleemat, taso Suora geometrisena peruskäsitteenä Pisteen ohella suora on geometrinen peruskäsite, jota varsinaisesti ei määritellä. Alkeisgeometriassa
Insinöörimatematiikka D
 Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
Lineaarialgebran laskumoniste Osa1 : vektorit
 Lineaarialgebran laskumoniste Osa1 : vektorit A. Sinin, kosinin ja tangentin laajennetut määritelmät 1. Määritä ao. yksikköympyrän avulla a) sin(120 o ) b) cos(180 o ) (piirrä kulman kylki, ja lue kuvasta
Lineaarialgebran laskumoniste Osa1 : vektorit A. Sinin, kosinin ja tangentin laajennetut määritelmät 1. Määritä ao. yksikköympyrän avulla a) sin(120 o ) b) cos(180 o ) (piirrä kulman kylki, ja lue kuvasta
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 22.3.2016 Susanna Hurme Päivän aihe: Rotaatioliikkeen kinematiikka: kulmanopeus ja -kiihtyvyys (Kirjan luvut 12.7, 16.3) Osaamistavoitteet Osata analysoida jäykän
KJR-C1001 Statiikka ja dynamiikka Luento 22.3.2016 Susanna Hurme Päivän aihe: Rotaatioliikkeen kinematiikka: kulmanopeus ja -kiihtyvyys (Kirjan luvut 12.7, 16.3) Osaamistavoitteet Osata analysoida jäykän
c) Määritä paraabelin yhtälö, kun tiedetään, että sen huippu on y-akselilla korkeudella 6 ja sen nollakohdat ovat x-akselin kohdissa x=-2 ja x=2.
 Määritä paraabelin yhtälö, kun tiedetään, että sen huippu on y-akselilla korkeudella 6 ja sen nollakohdat ovat x-akselin kohdissa x=-2 ja x=2.") MAA4 Koe 5.5.01 Jussi Tyni Kaikkiin tehtäviin ratkaisujen välivaiheet näkyviin! Ota kokeesta poistuessasi tämä paperi mukaasi! Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Valitse
MAA4 Koe 5.5.01 Jussi Tyni Kaikkiin tehtäviin ratkaisujen välivaiheet näkyviin! Ota kokeesta poistuessasi tämä paperi mukaasi! Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Valitse
Vektorit, suorat ja tasot
 , suorat ja tasot 1 / 22 Koulussa vektori oli nuoli, jolla oli suunta ja suuruus eli pituus. Siirretään vektori siten, että sen alkupää on origossa. Tällöin sen kärki on pisteessä (x 1, x 2 ). Jos vektorin
, suorat ja tasot 1 / 22 Koulussa vektori oli nuoli, jolla oli suunta ja suuruus eli pituus. Siirretään vektori siten, että sen alkupää on origossa. Tällöin sen kärki on pisteessä (x 1, x 2 ). Jos vektorin
Jakso 8. Ampèren laki. B-kentän kenttäviivojen piirtäminen
 Jakso 8. Ampèren laki Esimerkki 8.: Johda pitkän suoran virtajohtimen (virta ) aiheuttaman magneettikentän lauseke johtimen ulkopuolella etäisyydellä r johtimesta. Ratkaisu: Käytetään Ampèren lakia C 0
Jakso 8. Ampèren laki Esimerkki 8.: Johda pitkän suoran virtajohtimen (virta ) aiheuttaman magneettikentän lauseke johtimen ulkopuolella etäisyydellä r johtimesta. Ratkaisu: Käytetään Ampèren lakia C 0
Harjoitus 7. KJR-C2001 Kiinteän aineen mekaniikan perusteet, IV/2016
 Kotitehtävät palautetaan viimeistään keskiviikkoisin ennen luentojen alkua eli klo 4: mennessä. Muistakaa vastaukset eri tehtäviin palautetaan eri lokeroon! Joka kierroksen arvostellut kotitehtäväpaperit
Kotitehtävät palautetaan viimeistään keskiviikkoisin ennen luentojen alkua eli klo 4: mennessä. Muistakaa vastaukset eri tehtäviin palautetaan eri lokeroon! Joka kierroksen arvostellut kotitehtäväpaperit
Tekijä Pitkä matematiikka
 K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys10 Syksy 009 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
Mekaniikan jatkokurssi Fys10 Syksy 009 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
Yleistä vektoreista GeoGebralla
 Vektoreita GeoGebralla Vektoreilla voi laskea joko komentopohjaisesti esim. CAS-ikkunassa tai piirtämällä piirtoikkunassa. Ensimmäisen tavan etuna on, että laskujen tueksi muodostuu kuva. Tästä on varmasti
Vektoreita GeoGebralla Vektoreilla voi laskea joko komentopohjaisesti esim. CAS-ikkunassa tai piirtämällä piirtoikkunassa. Ensimmäisen tavan etuna on, että laskujen tueksi muodostuu kuva. Tästä on varmasti
Solmu 3/2001 Solmu 3/2001. Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä:
 Frégier n lause Simo K. Kivelä Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä: Suorakulmaisen kolmion kaikki kärjet sijaitsevat paraabelilla y = x 2 ; suoran kulman
Frégier n lause Simo K. Kivelä Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä: Suorakulmaisen kolmion kaikki kärjet sijaitsevat paraabelilla y = x 2 ; suoran kulman
Materiaalien mekaniikka
 Materiaalien mekaniikka 3. harjoitus jännitys ja tasapainoyhtälöt 1. Onko seuraava jännityskenttä tasapainossa kun tilavuusvoimia ei ole: σ x = σ 0 ( 3x L + 4xy 8y ), σ y = σ 0 ( x L xy + 3y ), τ xy =
Materiaalien mekaniikka 3. harjoitus jännitys ja tasapainoyhtälöt 1. Onko seuraava jännityskenttä tasapainossa kun tilavuusvoimia ei ole: σ x = σ 0 ( 3x L + 4xy 8y ), σ y = σ 0 ( x L xy + 3y ), τ xy =
Ota tämä paperi mukaan, merkkaa siihen omat vastauksesi ja tarkista oikeat vastaukset klo 11:30 jälkeen osoitteesta
 MAA5.2 Loppukoe 26.9.2012 Jussi Tyni Valitse 6 tehtävää Muista merkitä vastauspaperiin oma nimesi ja tee etusivulle pisteytysruudukko Kaikkiin tehtävien ratkaisuihin välivaiheet näkyviin! 1. Olkoon vektorit
MAA5.2 Loppukoe 26.9.2012 Jussi Tyni Valitse 6 tehtävää Muista merkitä vastauspaperiin oma nimesi ja tee etusivulle pisteytysruudukko Kaikkiin tehtävien ratkaisuihin välivaiheet näkyviin! 1. Olkoon vektorit
Voimat mekanismeissa. Kari Tammi, Tommi Lintilä (Janne Ojalan kalvoista)
") 1 Voimat mekanismeissa Kari Tammi, Tommi Lintilä (Janne Ojalan kalvoista) 12.2.2016 Sisältö Staattiset voimat Staattinen tasapainotila Vapaakappalekuva Tasapainoyhtälöt Kitkavoimat Hitausvoimat Hitausvoimien
1 Voimat mekanismeissa Kari Tammi, Tommi Lintilä (Janne Ojalan kalvoista) 12.2.2016 Sisältö Staattiset voimat Staattinen tasapainotila Vapaakappalekuva Tasapainoyhtälöt Kitkavoimat Hitausvoimat Hitausvoimien
PUHDAS, SUORA TAIVUTUS
 PUHDAS, SUORA TAIVUTUS Qx ( ) Nx ( ) 0 (puhdas taivutus) d t 0 eli taivutusmomentti on vakio dx dq eli palkilla oleva kuormitus on nolla 0 dx suora taivutus Taivutusta sanotaan suoraksi, jos kuormitustaso
PUHDAS, SUORA TAIVUTUS Qx ( ) Nx ( ) 0 (puhdas taivutus) d t 0 eli taivutusmomentti on vakio dx dq eli palkilla oleva kuormitus on nolla 0 dx suora taivutus Taivutusta sanotaan suoraksi, jos kuormitustaso
RAK-31000 Statiikka 4 op
 RAK-31000 Statiikka 4 op Opintojakson kotisivu on osoitteessa: http://webhotel2.tut.fi/mec_tme harjoitukset (H) harjoitusten malliratkaisut harjoitustyöt (HT) ja opasteet ilmoitusasiat RAK-31000 Statiikka
RAK-31000 Statiikka 4 op Opintojakson kotisivu on osoitteessa: http://webhotel2.tut.fi/mec_tme harjoitukset (H) harjoitusten malliratkaisut harjoitustyöt (HT) ja opasteet ilmoitusasiat RAK-31000 Statiikka
KRISTALLOGRAFIASSA TARVITTAVAA MATEMA- TIIKKAA
 KRISTALLOGRAFIASSA TARVITTAVAA MATEMA- TIIKKAA Aloita kertaamalla hilan indeksointi niin, että osaat kuutiollisen kiteen tasojen ja suuntien Miller-indeksit. Vektorit määritellään yleisessä muodossa r
KRISTALLOGRAFIASSA TARVITTAVAA MATEMA- TIIKKAA Aloita kertaamalla hilan indeksointi niin, että osaat kuutiollisen kiteen tasojen ja suuntien Miller-indeksit. Vektorit määritellään yleisessä muodossa r
Lineaarinen yhtälöryhmä
 Lineaarinen yhtälöryhmä 1 / 39 Lineaarinen yhtälö Määritelmä 1 Lineaarinen yhtälö on muotoa a 1 x 1 + a 2 x 2 + + a n x n = b, missä a i, b R, i = 1,..., n ovat tunnettuja ja x i R, i = 1,..., n ovat tuntemattomia.
Lineaarinen yhtälöryhmä 1 / 39 Lineaarinen yhtälö Määritelmä 1 Lineaarinen yhtälö on muotoa a 1 x 1 + a 2 x 2 + + a n x n = b, missä a i, b R, i = 1,..., n ovat tunnettuja ja x i R, i = 1,..., n ovat tuntemattomia.
Lineaarialgebra ja matriisilaskenta I. LM1, Kesä /218
 Lineaarialgebra ja matriisilaskenta I LM1, Kesä 2012 1/218 Avaruuden R 2 vektorit Määritelmä (eli sopimus) Avaruus R 2 on kaikkien reaalilukuparien joukko; toisin sanottuna R 2 = { (a, b) a R ja b R }.
Lineaarialgebra ja matriisilaskenta I LM1, Kesä 2012 1/218 Avaruuden R 2 vektorit Määritelmä (eli sopimus) Avaruus R 2 on kaikkien reaalilukuparien joukko; toisin sanottuna R 2 = { (a, b) a R ja b R }.
Matematiikan tukikurssi, kurssikerta 3
 Matematiikan tukikurssi, kurssikerta 3 1 Epäyhtälöitä Aivan aluksi lienee syytä esittää luvun itseisarvon määritelmä: { x kun x 0 x = x kun x < 0 Siispä esimerkiksi 10 = 10 ja 10 = 10. Seuraavaksi listaus
Matematiikan tukikurssi, kurssikerta 3 1 Epäyhtälöitä Aivan aluksi lienee syytä esittää luvun itseisarvon määritelmä: { x kun x 0 x = x kun x < 0 Siispä esimerkiksi 10 = 10 ja 10 = 10. Seuraavaksi listaus
Taso 1/5 Sisältö ESITIEDOT: vektori, koordinaatistot, piste, suora
 Taso 1/5 Sisältö Taso geometrisena peruskäsitteenä Kolmiulotteisen alkeisgeometrian peruskäsitteisiin kuuluu taso pisteen ja suoran lisäksi. Intuitiivisesti sitä voidaan ajatella joka suunnassa äärettömyyteen
Taso 1/5 Sisältö Taso geometrisena peruskäsitteenä Kolmiulotteisen alkeisgeometrian peruskäsitteisiin kuuluu taso pisteen ja suoran lisäksi. Intuitiivisesti sitä voidaan ajatella joka suunnassa äärettömyyteen
Tekijä Pitkä matematiikka
 Tekijä Pitkä matematiikka 5..017 110 Valitaan suoralta kaksi pistettä ja piirretään apukolmio, josta koordinaattien muutokset voidaan lukea. Vaakasuoran suoran kulmakerroin on nolla. y Suoran a kulmakerroin
Tekijä Pitkä matematiikka 5..017 110 Valitaan suoralta kaksi pistettä ja piirretään apukolmio, josta koordinaattien muutokset voidaan lukea. Vaakasuoran suoran kulmakerroin on nolla. y Suoran a kulmakerroin
Vanhoja koetehtäviä. Analyyttinen geometria 2016
 Vanhoja koetehtäviä Analyyttinen geometria 016 1. Määritä luvun a arvo, kun piste (,3) on käyrällä a(3x + a) = (y - 1). Suora L kulkee pisteen (5,1) kautta ja on kohtisuorassa suoraa 6x + 7y - 19 = 0 vastaan.
Vanhoja koetehtäviä Analyyttinen geometria 016 1. Määritä luvun a arvo, kun piste (,3) on käyrällä a(3x + a) = (y - 1). Suora L kulkee pisteen (5,1) kautta ja on kohtisuorassa suoraa 6x + 7y - 19 = 0 vastaan.
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys10 Kevät 010 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
Mekaniikan jatkokurssi Fys10 Kevät 010 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
RAK Statiikka 4 op
 RAK-31000 Statiikka 4 op Opintojakson kotisivu on osoitteessa: http://webhotel2.tut.fi/mec_tme harjoitukset (H) harjoitusten malliratkaisut harjoitustyöt (HT) ja opasteet ilmoitusasiat RAK-31000 Statiikka
RAK-31000 Statiikka 4 op Opintojakson kotisivu on osoitteessa: http://webhotel2.tut.fi/mec_tme harjoitukset (H) harjoitusten malliratkaisut harjoitustyöt (HT) ja opasteet ilmoitusasiat RAK-31000 Statiikka
Juuri 4 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty Kertaus. b) B = (3, 0, 5) K2. 8 ( 1)
 B = (3, 0, 5) K2. 8 ( 1)") Kertaus K1. a) OA i k b) B = (, 0, 5) K. K. a) AB (6 ( )) i () ( ( 7)) k 8i 4k AB 8 ( 1) 4 64116 819 b) 1 1 AB( ( 1)) i 1 i 4 AB ( ) ( 4) 416 0 45 5 K4. a) AB AO OB OA OB ( i ) i i i 5i b) Pisteen A paikkavektori
Kertaus K1. a) OA i k b) B = (, 0, 5) K. K. a) AB (6 ( )) i () ( ( 7)) k 8i 4k AB 8 ( 1) 4 64116 819 b) 1 1 AB( ( 1)) i 1 i 4 AB ( ) ( 4) 416 0 45 5 K4. a) AB AO OB OA OB ( i ) i i i 5i b) Pisteen A paikkavektori
Mb8 Koe Kuopion Lyseon lukio (KK) sivu 1/2
 sivu 1/2") Mb8 Koe 0.11.015 Kuopion Lyseon lukio (KK) sivu 1/ Kokeessa on kaksi osaa. Osa A ratkaistaan tehtäväpaperille ja osa B ratkaistaan konseptipaperille. Osa A: saat käyttää taulukkokirjaa mutta et laskinta.
Mb8 Koe 0.11.015 Kuopion Lyseon lukio (KK) sivu 1/ Kokeessa on kaksi osaa. Osa A ratkaistaan tehtäväpaperille ja osa B ratkaistaan konseptipaperille. Osa A: saat käyttää taulukkokirjaa mutta et laskinta.
Luento 7: Pyörimisliikkeen dynamiikkaa
 Luento 7: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Harjoituksia ja laskettuja esimerkkejä 1 / 37 Luennon sisältö Johdanto
Luento 7: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Harjoituksia ja laskettuja esimerkkejä 1 / 37 Luennon sisältö Johdanto
MUODONMUUTOKSET. Lähtöotaksumat:
 MUODONMUUTOKSET Lähtöotaksumat:. Materiaali on isotrooppista ja homogeenista. Hooken laki on voimassa (fysikaalinen lineaarisuus) 3. Bernoullin hypoteesi on voimassa (tekninen taivutusteoria) 4. Muodonmuutokset
MUODONMUUTOKSET Lähtöotaksumat:. Materiaali on isotrooppista ja homogeenista. Hooken laki on voimassa (fysikaalinen lineaarisuus) 3. Bernoullin hypoteesi on voimassa (tekninen taivutusteoria) 4. Muodonmuutokset
Tapa II: Piirretään voiman F vaikutussuora ja lasketaan momentti sen avulla. Kuva 3. d r. voiman F vaikutussuora
 VOIMAN MOMENTTI Takastellaan jäykkää kappaletta, joka pääsee kietymään akselin O ympäi. VOIMAN MOMENTTI on voiman kietovaikutusta kuvaava suue. Voiman momentti määitellään voiman F ja voiman vaen tulona:
VOIMAN MOMENTTI Takastellaan jäykkää kappaletta, joka pääsee kietymään akselin O ympäi. VOIMAN MOMENTTI on voiman kietovaikutusta kuvaava suue. Voiman momentti määitellään voiman F ja voiman vaen tulona:
KJR-C2002 Kontinuumimekaniikan perusteet
 KJR-C2002 Kontinuumimekaniikan perusteet Luento 25.11.2015 Susanna Hurme, Yliopistonlehtori, TkT Tämän päivän luento Aiemmin ollaan johdettu palkin voimatasapainoyhtälöt differentiaaligeometrisella tavalla
KJR-C2002 Kontinuumimekaniikan perusteet Luento 25.11.2015 Susanna Hurme, Yliopistonlehtori, TkT Tämän päivän luento Aiemmin ollaan johdettu palkin voimatasapainoyhtälöt differentiaaligeometrisella tavalla
Lineaariavaruudet. Span. Sisätulo. Normi. Matriisinormit. Matriisinormit. aiheita. Aiheet. Reaalinen lineaariavaruus. Span. Sisätulo.
 Lineaariavaruudet aiheita 1 määritelmä Nelikko (L, R, +, ) on reaalinen (eli reaalinen vektoriavaruus), jos yhteenlasku L L L, ( u, v) a + b ja reaaliluvulla kertominen R L L, (λ, u) λ u toteuttavat seuraavat
Lineaariavaruudet aiheita 1 määritelmä Nelikko (L, R, +, ) on reaalinen (eli reaalinen vektoriavaruus), jos yhteenlasku L L L, ( u, v) a + b ja reaaliluvulla kertominen R L L, (λ, u) λ u toteuttavat seuraavat