ELEC-C1230 Säätötekniikka. Luku 7: Taajuusanalyysi
|
|
|
- Otto Hämäläinen
- 6 vuotta sitten
- Katselukertoja:
Transkriptio
1 ELEC-C123 Säätötekniikka Luku 7: Taajuusanalyysi
2 Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa (napa-nollakuviot, karakteristinen yhtälö, siirtofunktiomallit) Tällä luennolla tutkitaan systeemien käyttäytymistä taajuustasossa. Tämän opintojakson puitteissa keskitytään sinimuotoisen värähtelyn muuttumiseen sen kulkiessa dynaamisen systeemin läpi, mutta samat yleiset periaatteet tulevat pätemään myös muille deterministisille signaaleille ja kohinalle. Viiveiden käsittely on taajuustasossa hyvin yksinkertaista. Esimerkiksi viiveellisten systeemien stabiiliustarkastelu on helpointa tehdä taajuustasossa. Taajuusanalyysiin perustuvat säätimet (vaiheen johto- ja jättöpiirit) perustuvat avoimen silmukan taajuuskarakteristikan modifiointiin halutuilla taajuuksilla. Epälineaarisille ja MIMO-systeemeille on kehitetty taajuusanalyysiin perustuvia säätösuunnittelumenetelmiä.
3 Esimerkki: Laaduntasaussäiliö Linjalta valmistuvan tuotteen ominaisuudet (pitoisuus C (t)) vaihtelevat, joten tuotantolinjan loppuun on asennettu laaduntasaussäiliö (ideaalisekoitin), jossa parempi- ja huonompilaatuiset jakeet sekoitetaan tuotekriteerit täyttäväksi lopulliseksi tuotteeksi (pitoisuus C(t)) Tutkitaan laaduntasaussäiliön taajuusominaisuuksia Systeemin malli: VC () t FC() t FC() t Cs () 1 1 Gs () V C () s s1 s1 Heräte on nyt sinimuotoista värähtelyä: F C() t u() t Au sin( t) Au U() s Lu() t 2 2 s F C(t) V C(t) F C(t)
4 Vaste: Esimerkki: Laaduntasaussäiliö Y() s G() s U() s Trigonometriasta tiedetään, että a b a b b a 2 2 sin cos sin arctan( ) Tällöin saadaan vasteelle: A s u ( 2 1)( 2 ) s t 1 A u Ct () yt () L Ys ( ) e sin( t) cos( t) 2 1 ( ) t Aue Au Ct ( ) y( t) sin( tarctan( )) y ( ) ( ) 2 1 ( ) 2 a t y t 1 ( ) Vaste muodostuu alkutransientista (ajan funktiona eksponentiaalisesti katoava osuus) ja jatkuvuustilan vasteesta (sinimuotoista värähtelyä).
5 Esimerkki: Laaduntasaussäiliö U -.1 Y Kun heräte on sinimuotoista värähtelyä, niin jatkuvuustilan vaste on myös sinimuotoista värähtelyä, jolla on sama taajuus kuin herätteellä, mutta eri amplitudi A y ja vaihesiirto. Au yt ( ) sin( tarctan( )) Asin( ) 2 y t 1 ( ) Nähdään, että vasteen amplitudi ja vaihesiirto ovat taajuuden funktioita
6 Esimerkki: Laaduntasaussäiliö Matalilla taajuuksilla vaste lähestyy herätettä ja korkeilla taajuuksilla nollaamplitudista signaalia, jonka vaihe-ero on -/2 (-9 ). A u A limay lim Au, lim Ay lim 1 ( ) 1 ( ) lim lim arctan( ), lim lim arctan( ) u 2 2 Oletetaan, että häiriöt ilmenevät taajuudella 1 (rad/s) virtauksen F ollessa 2 m 3 /s. Kuinka suuri laaduntasaussäiliö tarvitaan vaimentamaan häiriöt puoleen, kymmenesosaan tai sadasosaan? Amplitudisuhde A A A y u 2 V 2 F 3 A5., 1, F 2 V ( m ) ( ) 1 ( ) 3 A1., 1, F 2 V ( m ) 3 A. 1, 1, F 2 V ( m ) 2
7 Esimerkki: Laaduntasaussäiliö Annetaan aikavakiolle arvo yksi ja simuloidaan säiliön käyttäytymistä eri signaaleilla. Sinimuotoisella signaalilla käyttäytyminen taajuustasossa noudattaa määritettyä vastetta, mutta muillakin signaaleilla saadaan vastaavia tuloksia 1 Laaduntasaussäiliö suodattaa.5 signaalista korkeat taajuudet u y 1.5 u y 1.5 u y taajuus.1-1 taajuus 1-1 taajuus
8 Fourier-muunnos ja taajuusvaste Taajuusfunktio saadaan muodostettua Fourier-muunnoksen avulla, joka on hyvin samankaltainen kuin Laplace-muunnos. st Laplace-muunnos: Fs ( ) L ft ( ) fte ( ) dt jt Fourier-muunnos: F( j) F f( t) f( t) e dt Jos funktio f(t) on määritelty ainoastaan nollahetkestä eteenpäin (t ), kuten systeemi- ja säätötekniikassa tavallisesti on, niin Fourier ja Laplacemuunnokset yhtyvät. Tällöin systeemin taajuusvaste F() saadaan siirtofunktiosta yksinkertaisesti sijoittamalla Laplace-muuttujan s tilalle j (j on imaginääriyksikkö. Taajuusanalyysissä käytetään tavallisesti i:n sijasta j:tä). Y( j) Taajuusvaste: F( ) G( j) U( j)
9 Taajuusvaste Systeemin taajuusvaste on kompleksiluku ja se voidaan aina esittää muodossa, jossa reaali- ja imaginääriosat ovat erillään: F( ) G( j) Re G( j) jim G( j) z R j X Yleisesti kompleksiluvun itseisarvo kuvaa vektorin pituutta ja napakulma kulmaa positiivisen reaaliakselin suhteen. 2 2 z R X n, R, z arctan( X R) n n 1, R Taajuusanalyysissä systeemin amplitudisuhde A saadaan systeemiä kuvaavan taajuusvasteen itseisarvosta ja vaihe-ero napakulmasta A 2 2 y A ( ) Re ( ) Im ( ), Re ( ) A G j G j G j n G j u, G( j) arctan(im G( j) Re G( j) ) n n 1, Re G( j) Vaihe-eron laskemisessa on huomioitava, että reaali- ja imaginääriosien etumerkit saattavat kumota toisensa, joten se, missä kompleksitason neljänneksessä vektori sijaitsee, on tarkistettava erikseen.
10 Esimerkki: Laaduntasaussäiliö Lasketaan nyt taajuusvaste laaduntasaussäiliölle 1 Gs () s 1 1 j1 1 F( ) G( j) j j j j ( 1)( 1) ( ) 1 ( ) 1 Laaduntasaussäiliön amplitudisuhde A ja vaihe-ero ovat: 2 A 1 ( ) 1 y A A ( ) u G j ( ) 1 ( ) 1 ( ) 1 1 G( j) arctan( ) arctan( ) 2 2 ( ) 1 ( ) 1 Saadaan samat tulokset kuin laskemalla suoraan aikatason vasteesta
11 Taajuusvasteen graafiset esitykset Taajuusvaste voidaan määrittää teoreettisesti siirtofunktion perusteella (kuten edellisessä esimerkissä) tai kokeellisesti syöttämällä tutkittavaan systeemiin sinimuotoista herätettä ja mittaamalla vasteen amplitudisuhde sekä vaihe-ero eri taajuuksilla. Taajuusvasteelle käytetään kolmea erilaista graafista esitystapaa Boden diagrammi Amplitudisuhde (tavallisesti desibeleinä) taajuuden funktiona ja vaihe-ero (tavallisesti asteina) taajuuden funktiona eri käyrissä. Nyquistin diagrammi (polaaridiagrammi) Systeemin taajuusvaste kompleksitasossa taajuuden muuttuessa nollasta äärettömään (tai negatiivisesta äärettömyydestä positiiviseen äärettömyyteen). Nicholsin kartta Systeemin amplitudisuhde (tavallisesti desibeleinä) vaihe-eron (tavallisesti asteina) funktiona.
12 Esimerkki: Laaduntasaussäiliö Piirretään laaduntasaussäiliön taajuusvasteen graafiset diagrammit, kun aikavakio = 1. 1 F( ) G( j) j A G( j), A 2 db 2 log 1( A) db 1 G( j) arctan( ) Boden diagrammi esitetään tavallisesti logaritmisella asteikolla, joten valitaan mielenkiintoisiksi taajuuksiksi riittävän pieniä ja suuria taajuuksia, toisaalta Nyquistin diagrammi piirretään ei-logaritmisella asteikolla, joten valitaan taajuuksia myös aikavakion (1) molemmilta puolilta eilogaritmisesti. Tulokset halutuilla taajuuksilla on esitetty oheisessa taulukossa
13 Esimerkki: Laaduntasaussäiliö Re{G(j)} Im{G(j)} A A/dB /rad /deg 1,, 1,,,,,1 1,, 1,, -, -,6,1,99 -,1 1, -,4 -,1-5,71,5,8 -,4,89 -,97 -,46-26,57 1,5 -,5,71-3,1 -,79-45, 2,2 -,4,45-6,99-1,11-63,43 5,4 -,19,2-14,15-1,37-78,69 1,1 -,1,1-2,4-1,47-84,29 1, -,1,1-4, -1,56-89,43 1,,, -6, -1,57-89,94 1,,, -8, -1,57-89,99
14 Esimerkki: Laaduntasaussäiliö Hahmotellaan Boden diagrammi Bode Diagram Magnitude (db) Frequency (rad/sec) Phase (deg)
15 Esimerkki: Laaduntasaussäiliö Hahmotellaan Nyquistin diagrammi Nyquist Diagram -.1 Imaginary Axis Real Axis
16 Esimerkki: Laaduntasaussäiliö Hahmotellaan Nicholsin kartta 5 Nichols Chart -5 Open-Loop Gain (db) Open-Loop Phase (deg)
17 Taajuusvasteen graafiset esitykset Boden ja Nyquistin diagrammit sekä Nicholsin kartta kuvaavat kaikki systeemin taajuusvastetta, mutta kukin graafisista esityksistä on kehitetty erilaisiin tarpeisiin Boden diagrammi on ainoa, jossa on taajuusakseli mukana ja se soveltuu hyvin systeemin vahvistus- ja vaimennusominaisuuksien tarkasteluun mielenkiintoisilla taajuuksilla. Nyquistin diagrammista puuttuu taajuusakseli, joten siitä ei nähdä mitä tapahtuu annetuilla taajuuksilla, mutta se soveltuu erittäin hyvin säädetyn järjestelmän stabiilisuustarkasteluun - kuten myöhemmin tällä luennolla tullaan näkemään. Nicholsin kartta soveltuu säädetyn (takaisinkytketyn) järjestelmän taajuuskarakteristikan määrittämiseen - kun säätämätön prosessi tunnetaan.
 bode(sys) grid nyquist(sys) nichols(sys) Nyquistin diagrammin toinen puolikas kuvaa taajuusvastetta, kun taajuus muuttuu neg.")
18 Taajuusvaste MATLABissa Taajuusvasteen graafiset esitykset piirretään MATLABissa loogisesti komennoilla bode, nyquist ja nichols. sys=tf(1,[1 1]) bode(sys) grid nyquist(sys) nichols(sys) Nyquistin diagrammin toinen puolikas kuvaa taajuusvastetta, kun taajuus muuttuu neg. äärettömyydestä nollaan.
19 Taajuusvasteen tekijät Siirtofunktion jokainen tekijä (navat, nollat, viivetermit ja vakiot) on taajuustasossa kompleksiluku. Nämä kompleksiluvut voidaan laventaa, kertoa keskenään ja laskea yhteen siten, että saadaan lauseke, josta nähdään suoraan koko taajuusvasteen reaaliosa ja imaginääriosa ja edelleen amplitudisuhde ja vaihe-ero. Toisaalta voidaan laskea kunkin tekijän itseisarvo ja napakulma erikseen ja soveltaen kompleksilaskennan perussääntöjä muodostaa koko taajuusvasteen amplitudisuhde ja vaihe-ero tekijöiden avulla Polaarikoordinaatit: z= R+ jx r(cos( ) jsin( )) re R S T R S T R rcos( ) 2 2 r R X X rsin( ), arctan( X R) n ( n jos R, n1jos R) Polaarikoordinaateilla on helppo johtaa tekijöiden tulon ja osamäärän laskusäännöt: j z = re, z = re 1 j j1 j2 j( 1 2) j1 j2 j( 12) z z = re re rre, z z = re re r r e j
20 Taajuusvasteen tekijät Taajuustasossa osoittajan tekijöiden itseisarvot kerrotaan keskenään ja ne jaetaan nimittäjän tekijöiden itseisarvoilla. Osoittajan tekijöiden napakulmat lasketaan yhteen ja niistä vähennetään nimittäjän tekijöiden napakulmat. Gs () s a ( sb)( sc) G( j ) j a ( j b)( j c) 2 2 j a a G( j ) j b j c b c G( j) j a j b j c l q l q l q l q Mikäli amplitudisuhteet esitetään desibeleinä, niin logaritmin laskusäännöistä saadaan F log HG pp KJ 1 2 log p1 log p2 log p3 2log 1 G( j ) p 3 I F b g b g b g c h I j a 2log HG KJ 1 2 log1 j a log1 j b log1 j c j b j c c h
21 Taajuusvasteen tekijät: Vakiokerroin Vakiokerroin on puhtaasti reaalinen komponentti, joten sen napakulma on joko nolla (positiivinen vakio) tai ±18º (negatiivinen vakio). R S T G1 () s K G () s K 2 K Polaarikoordinaateilla:, R S T G ( j) G ( j) K 1 2 l q l q 1 2 G ( j), G ( j) 18 Im K Re -K Im Re Boden diagrammi G 1 :lle 2lgK Boden vahvistuskäyrä deg Boden vaihekäyrä G 2 :lle 2lgK Boden vahvistuskäyrä deg Boden vaihekäyrä -18
22 Integraattori ja derivaattori Integraattori ja derivaattori ovat puhtaasti kompleksisia komponentteja, joten niiden napakulma on joko +9º (derivaattori) tai -9º (integraattori). R S T R G s s G j j 1() S 1( ) G s G j j 2() 2( ) s j T j Im Re R S T 1 G1( j), G2( j) G ( j) 9, G ( j) 9 l q l q 1 2 l q l q 1 2 lim G ( j) j, lim G ( j) j lim G ( j) j, lim G ( j) j l q l q 1 2 -j Im Re
23 Integraattori ja derivaattori Derivaattorin Boden vahvistuskäyrä nousee 2 desibeliä dekadia kohden ja se leikkaa -tason kulmataajuudella yksi. Integraattorin Boden vahvistuskäyrä laskee 2 desibeliä dekadia kohden ja se leikkaa -tason kulmataajuudella yksi. Boden diagrammi Boden vahvistuskäyrä Boden vaihekäyrä derivaattori G 1 :lle deg 2dB/dek 9 1 integraattori G 2 :lle Boden vahvistuskäyrä deg Boden vaihekäyrä 1-2dB/dek -9
24 Viivetermi Viiveen käsittely on hyvin helppoa taajuustasossa. Viive voidaan muuttaa kompleksiluvuksi Eulerin kaavoilla: st jt Gs () e G( j) e cos( T) jsin( T) 2 2 G( j) cos ( T) sin ( T) 11 F l q sin( T) G( j ) arctanhg KJ b g arctan tan( T) cos( T) T Viive ei vaikuta amplitudisuhteeseen (ei vahvista eikä vaimenna), mutta sillä on huomattava vaikutus vaihe-eroon (viivästyttää signaalia ja lisää vaiheeroa) Boden vahvistuskäyrä deg I Boden vaihekäyrä 1 Im Re
25 R Ensimmäisen kertaluvun termi Ensimmäisen kertaluvun termi eli reaalinen napa tai nolla käsiteltiin laaduntasaussäiliöesimerkissä S G1 () s Ts1 1, T T G2 () s Ts 1 lim G ( j) lim G ( j) l q l q 1 2 R S T G1 ( j) Tj 1 1, T G2 ( j ) Tj 1 1 l q l q l q R U ST VW R ST U VW 1 1 lim G1( j) lim Tj j, lim G2( j) lim lim j Tj T Pienillä taajuuksilla ensimmäisen kertaluvun termi lähestyy vakiokerrointa 1 ja suurilla taajuuksilla derivaattoria (nolla) tai integraattoria (napa). j
26 Ensimmäisen kertaluvun termi Approksimatiiviseen Boden diagrammiin saadaan käännepisteet (vahvistuskäyrään taajuudelle 1/T ja vaihekäyrään taajuuksille.1/t ja 1/T. Boden diagrammi: G 1 :lle G 2 :lle Boden vahvistuskäyrä 2dB/dek deg 9 1/T Boden vahvistuskäyrä deg 1/T -2dB/dek Boden vaihekäyrä.1/t 1/T Boden vaihekäyrä.1/t 1/T Todellisuudessa Boden diagrammissa ei ole derivaatan epäjatkuvuuskohtia. Approksimatiiviseen vahvistuskäyrään tulee 3 db ja vaihekäyrään 6 virhe käännepisteissä. -9
27 Toisen kertaluvun värähtelevä dynamiikka Toisen kertaluvun värähtelevä dynamiikka eli kompleksinen napapari aiheuttaa taajuustasoon resonanssitaajuuden ja Boden diagrammiin resonanssipiikin. 2 2 n n Gs () G( j ) s 2 ns n ( n ) 2n j 1 2 Resonanssitaajuus: r n ( ) 2 ( ) j n n
28 Toisen kertaluvun värähtelevä dynamiikka Boden vahvistuskäyräksi saadaan:

 bode(sys) sys=tf(1,[1.1 1]) sys=tf(1,[1.")
29 Yksinkertaisia taajuusvasteita Muodostetaan MATLABilla edellä esitettyjen yksinkertaisten systeemien taajuusvasteita: värähtelyt: sys=tf(1,[1.1 1]) bode(sys) sys=tf(1,[1.1 1]) sys=tf(1,[1.3 1]) sys=tf(1,[1.7 1]) sys=tf(1,[1 2 1])...
30 Yksinkertaisia taajuusvasteita Nyquistin diagrammissa resonanssi näkyy siinä, että käyrän etäisyys origosta kasvaa suuremmaksi kuin nollataajuudella.
31 Approksimatiivinen taajuusvaste Kaikki lineaaristen systeemien taajuusvasteet koostuvat edellä esitetyistä tekijöistä Vaiheominaisuudet lasketaan yhteen ja vahvistusominaisuudet kerrotaan keskenään paitsi jos vahvistus esitetään desibeleinä (logaritminen suure), jolloin nekin lasketaan yhteen. Yhdistämällä näitä komponentteja keskenään saadaan haluttu taajuusvaste. Esimerkiksi: G Koostuu tekijöistä: tot () s 2 s 3s 1 (2), ( s) ja (3s1) Kullekin tekijälle voidaan erikseen piirtää taajuusvaste ja summata ne graafisesti. Tämä on erittäin käytännöllistä, kun kokeillaan säädetylle järjestelmälle erilaisia säätimiä. Piirretään systeemin taajuusvaste ja lisätään siihen vuorollaan erilaisia säätimiä, jonka jälkeen säädetyn järjestelmän suorituskykyä arvioidaan.
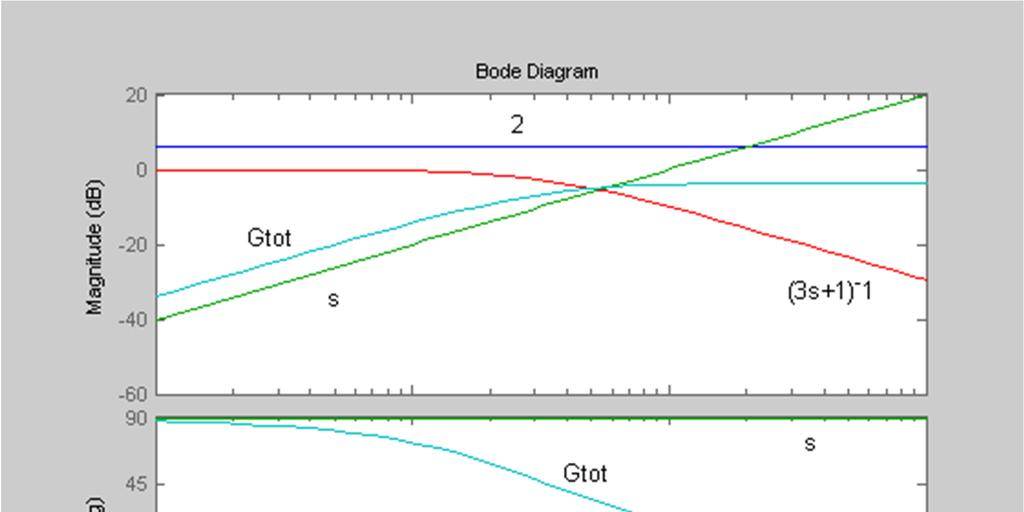
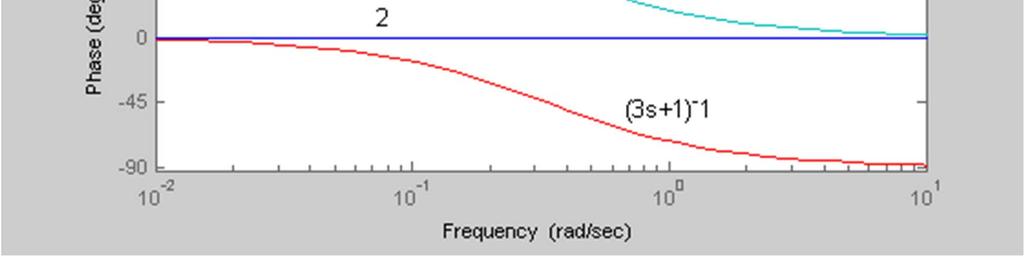
32 Approksimatiivinen taajuusvaste
33 Nyquistin stabiilisuuskriteeri Klassinen ( täydellinen ) Nyquistin kriteeri: Takaisinkytketty järjestelmä on stabiili, jos avoimen silmukan Nyquistin diagrammi kiertää pisteen -1 (-1+j) vastapäivään täsmälleen yhtä monta kertaa kuin avoimen silmukan siirtofunktiolla on napoja oikeassa puolitasossa. Erikoistapaus Nyquistin kriteeristä: Jos avoimen silmukan siirtofunktiolla ei ole lainkaan napoja oikeassa puolitasossa, niin takaisinkytketty järjestelmä on stabiili, jos avoimen silmukan Nyquistin diagrammi ei kierrä pistettä -1 (-1+j) lainkaan. Otetaan muutama esimerkki Nyquistin stabiilisuuskriteeristä
34 Nyquistin stabiilisuuskriteeri, esimerkki Systeemiä, jonka siirtofunktio on G(s) = (s -1)/(s 2-2s + 5) säädetään P- säätimellä. Onko säädetty järjestelmä stabiili K P :n arvoilla 1, 4 ja 7. s 1 Gs () 2 s 2s5 G () s K c G OL P () s KP ( s1) 2 s 2s 5 Y ref (s) + _ Avoimen silmukan siirtofunktiolla on kaksi napaa oikeassa puolitasossa, joten Nyquistin diagrammin olisi kierrettävä piste -1 kaksi kertaa vastapäivään, jotta säädetty järjestelmä olisi stabiili. Piirretään Nyquistin diagrammi kullakin säätimen vahvistuksella. sys1=tf([1-1],[1-2 5]) sys2=tf(4*[1-1],[1-2 5]) sys3=tf(7*[1-1],[1-2 5]) nyquist(sys1)... E(s) G c (s) Säädin U(s) G(s) Prosessi Y(s)

35 Nyquistin stabiilisuuskriteeri, esimerkki Saadaan diagrammit K P :n arvolla 1 Nyquistin diagrammi ei kierrä pistettä -1 lainkaan, joten säädetty järjestelmä on epästabiili. K P :n arvolla 4 Nyquistin diagrammi kiertää pisteen -1 kaksi kertaa vastapäivään, joten säädetty järjestelmä on stabiili. K P :n arvolla 7 Nyquistin diagrammi kiertää pisteen -1 kerran, joten säädetty järjestelmä on epästabiili.
36 Nyquistin stabiilisuuskriteeri, esimerkki Systeemiä, jonka siirtofunktio on G(s) = 1/(s + 1) 3 säädetään P-säätimellä. Onko säädetty järjestelmä stabiili K P :n arvoilla 6, 8 ja 1. 1 Gs () 3 2 s 3s 3s1 G () s K c G OL P () s KP 3 2 s 3s 3s 1 Avoimen silmukan siirtofunktiolla ei ole lainkaan napoja oikeassa puolitasossa, joten Nyquistin diagrammi ei saa kiertää pistettä -1 lainkaan, jotta säädetty järjestelmä olisi stabiili. Piirretään Nyquistin diagrammi kullakin säätimen vahvistuksella. sys1=tf(6,[ ]) sys2=tf(8,[ ]) sys3=tf(1,[ ]) nyquist(sys1)... Y ref (s) + _ E(s) G c (s) Säädin U(s) G(s) Prosessi Y(s)

37 Nyquistin stabiilisuuskriteeri, esimerkki Saadaan diagrammit K P :n arvolla 6 säädetty järjestelmä on stabiili, arvolla 8 marginaalisesti stabiili ja arvolla 1 epästabiili.
38 Stabiilisuuskriteeri Nyquistin stabiilisuuskriteeri voidaan yksinkertaisissa tapauksissa esittää myös Boden diagrammissa ja Nicholsin kartassa. Tällöin stabiilisuuskriteeri (erikoistapaus, avoimen silmukan siirtofunktiolla ei ole napoja oikeassa puolitasossa) saa muodon: Säädetty järjestelmä on stabiili, jos G ( j) 1 ( db), samalla taajuudella, jolla G ( j) 18 OL Tarkastellaan edellistä esimerkkiä. K P :n arvolla 1 säädetty järjestelmä on stabiili, arvolla 8 marginaalisesti stabiili ja arvolla 15 epästabiili. OL
39 Stabiilisuuskriteeri Jos piirretään Boden diagrammi ensimmäiselle esimerkille (avoimen silmukan siirtofunktiossa kaksi napaa oikeassa puolitasossa), niin saadut käyrät eivät kerro mitään stabiilisuudesta (eivätkä itse asiassa mitään avoimen silmukan amplitudisuhteesta tai muista värähtelyominaisuuksista. Säätämätön systeemi on epästabiili, joten sen vaste menee jatkuvuustilassa äärettömään.
40 Stabiilisuuskriteeri Tarkastellaan vielä stabiilisuuskriteeriä Nicholsin kartassa erikoistapauksessa, jossa avoimen silmukan siirtofunktiolla ei ollut napoja oikeassa puolitasossa. G ( j) 1 ( db), samalla taajuudella, jolla G ( j) 18 OL Ensimmäisessä kuvassa systeemi on stabiili, toisessa marginaalisesti stabiili ja kolmannessa epästabiili. Nicholsin kartassa säädetty järjestelmä on stabiili, jos avoimen silmukan siirtofunktio kiertää pisteen -1 ( db, -18º) oikealta puolelta (ylhäältä alas). OL
41 Vahvistus- ja vaihevarat Vahvistus- ja vaihevarat kertovat kuinka kaukana säädetty järjestelmä on epästabiilisuudesta ja kuinka paljon avoimen silmukan vahvistusta voidaan vielä kasvattaa ilman että säädetystä järjestelmästä tulee epästabiili. Sekä vahvistus- että vaihevarassa tutkitaan kuinka kaukana avoimen silmukan taajuusfunktio on kriittisestä pisteestä -1 (eli kuinka kaukana ollaan stabiilisuusrajoista) Vahvistusvarassa määritetään kuinka kaukana systeemin amplitudisuhde on kriittisestä amplitudisuhteesta 1 (eli db) - silloin kun napakulma saa kriittisen arvon -18º. Vaihevarassa määritetään kuinka kaukana systeemin napakulma on kriittisestä napakulmasta -18º - silloin kun amplitudisuhde saa kriittisen arvon 1 ( db). Vahvistus- ja vaihevarat voidaan määrittää Nyquistin diagrammista (tai erikoistapauksessa myös Boden diagrammista tai Nicholsin kartasta) Ehdollisesti stabiileilla järjestelmillä (useita peräkkäisiä stabiilisuuden ja epästabiilisuuden jaksoja eri vahvistuksen arvoilla) saadaan useita samanaikaisia vahvistus- ja vaihevaroja.
42 Vahvistus- ja vaihevarat Nyquistin diagrammissa vaihevarat saadaan yksikköympyrän ja Nyquistin diagrammin leikkauspisteistä ja vahvistusvarat negatiivisen reaaliakselin ja Nyquistin diagrammin leikkauspisteistä. Nyquistin diagrammi leikkaa negatiivisen reaaliakselin pisteessä -a Vahvistusvara on 1/a Negatiivisesta reaaliakselista on g:n suuruinen kulma Nyquistin diagrammin ja yksikköympyrän leikkauspisteeseen Vaihevara on g

43 Vahvistus- ja vaihevarat Boden diagrammissa vaihevarat saadaan etäisyyksinä kriittisestä taajuudesta ja vahvistusvarat etäisyyksinä kriittisestä vahvistuksesta Määritetään kulmataajuus, jolla vaihekäyrä leikkaa kriittisen napakulman -18º. ( G ) ja kulmataajuus, jolla vahvistuskäyrä leikkaa kriittisen vahvistuksen db ( P ) Vahvistusvara on db 2log 1 GOL ( j G ) db Vaihevara on l 18 G ( j ) OL P q
44 Vahvistus- ja vaihevarat Nicholsin kartassa vahvistus- ja vaihevarat saadaan etäisyyksinä kriittisestä pisteestä -1 ( db, 18º)
![Vahvistus- ja vaihevarat MATLABissa MATLABissa vahvistus ja vaihevarat saadaan komennolla margin esim: sys=tf(2,[1 3 3 1])](/docs-images/64/51288337/images/45-1.jpg "Transfer function: 2 --------------------- s^3 + 3 s^2 + 3 s + 1 [Gm,Pm,Wcg,Wcp] = margin(sys) Gm = 4.6 Pm = 67.658 Wcg = 1.")
45 Vahvistus- ja vaihevarat MATLABissa MATLABissa vahvistus ja vaihevarat saadaan komennolla margin esim: sys=tf(2,[ ]) Transfer function: s^3 + 3 s^2 + 3 s + 1 [Gm,Pm,Wcg,Wcp] = margin(sys) Gm = 4.6 Pm = Wcg = Wcp =.7663
46 Avoimen silmukan vahvistus Vahvistusvara kertoo kuinka paljon avoimen silmukan vahvistusta voi vielä kasvattaa ilman että säädetty järjestelmä muuttuisi epästabiiliksi. Miten avoimen silmukan vahvistuksen muuttaminen sitten vaikuttaa taajuusvasteeseen? Mikäli vahvistus säilyy samanmerkkisenä, napakulma pysyy ennallaan (tämän opintojakson puitteissa tarkastellaan lähinnä positiivista vahvistusta). Taajuusvasteen kertominen vakiolla K ei vaikuta mitenkään vaihe-eroon, mutta amplitudisuhde kasvaa K-kertaiseksi. Nyquistin diagrammissa jokainen diagrammin piste siirtyy K-kertaa kauemmas origosta Boden diagrammissa vahvistuskäyrä nousee 2lgK :n verran ylös (tai alas, jos K on ykköstä pienempi) Nicholsin kartassa taajuusvaste nousee 2lgK :n verran ylös (tai alas, jos K on ykköstä pienempi) Vahvistusvara kertoo suoraan kuinka monikertaiseksi vahvistusta voidaan kasvattaa.
47 Stabiilisuusrajat Palataan edelliseen esimerkkiin, jossa oli hankala epästabiili ja eiminimivaiheinen systeemi, jota säädettiin P-säätimellä. Esimerkissä todettiin, että säädetty järjestelmä on epästabiili K P :n arvoilla 1 ja 7, mutta stabiili arvolla 4. Määritetään nyt säädetyn järjestelmän stabiilisuusalue (K P :n suhteen). Kun piirretään avoimen silmukan siirtofunktion Nyquistin diagrammi K P :n arvolla 1, niin negatiivisen reaaliakselin leikkauspisteet ovat -.2 ja -.5 eli vastaavat vahvistusvarat ovat 1/.2 = 5 ja 1/.5 = 2. Nyquistin käyrä on saatava kiertämään piste -1 kahdesti vastapäivään, jotta säädetty järjestelmä olisi stabiili, joten vahvistus on kerrottava vähintään kaksinkertaiseksi, jotta päästään pisteeseen -1. Toisaalta, jos vahvistus kerrotaan yli viisinkertaiseksi, niin saadaan vain yksi kierros vastapäivään ja säädetystä järjestelmästä tulee jälleen epästabiili. Saadaan stabiilisuusrajat: 2 5 K P
48 Stabiilisuus taajuustasossa Edellinen esimerkki olisi voitu aivan yhtä hyvin ratkaista Routhin kaaviolla Voidaanko taajuustason stabiilisuusanalyysillä tehdä jotain, mihin Routhin kaavio ei taivu? Myöhemmillä opintojaksoilla tullaan tutustumaan Nyquistin stabiilisuuskriteerin modifikaatioihin, joita voidaan soveltaa esimerkiksi epälineaarisille ja monimuuttujasysteemeille (tämän opintojakson aihepiirin ulkopuolella). Taajuusvasteeseen perustuvalla stabiilisuustarkastelulla on se etu, että taajuusvaste voidaan määrittää tuntemattomasta systeemistä kokeellisesti. On yksi sovellusalue, jossa stabiilisuustarkastelu taajuusvasteen avulla vie voiton kaikista muista menetelmistä... viiveellisten säädettyjen järjestelmien analyysi.
49 Viiveellisen systeemin säätö Lähes kaikissa todellisissa systeemeissä on kuollutta aikaa, mutta usein se oletetaan merkityksettömäksi ja jätetään tarkastelun ulkopuolelle. On kuitenkin varsin selvää, että viiveellä on huomattava vaikutus säädetyn järjestelmän käyttäytymiseen ja erityisesti stabiilisuuteen Otetaan esimerkiksi auton ohjaaminen mutkaisella tiellä: Jos ratin kääntämisen seurauksena pyörät välittömästi kääntyvät, niin auton hallinta on helppoa ja tiellä voidaan edetä reipasta vauhtia. Entä jos ratin kääntämisen seurauksena pyörät kääntyisivät vasta kolmen sekunnin viiveellä? Suurilla nopeuksilla auto muuttuisi epästabiiliksi ja päätyisi ojaan, joten ainoa ratkaisu on madella eteenpäin hyvin hitaasti (tai käyttää kehittyneitä prediktiivisiä hallintastrategioita...). Tarkastellaan samaa läpivirtausprosessia, joka esiteltiin luennon alussa. Nyt ei tyydytä pelkästään suodattamaan häiriöitä vaan ne pyritään säätämään pois syöttämällä säiliöön erilaisia pitoisuuksia. Tutkitaan stabiilius ensin olettaen, että systeemi on viiveetön ja katsotaan, miten tilanne muuttuu jos ohjausvirtaus syötetään putken (tulppavirtaus) kautta jolloin systeemin tulee kuollutta aikaa.
50 Viiveellisen systeemin säätö Viiveetön systeemi: Viiveellinen systeemi: 1 G1 () s s 1 G2( s) Ts d e s 1 Viiveettömän systeemin säätö P-säätimellä: () s s Viiveetön järjestelmä on stabiili kaikilla positiivisilla K P :n arvoilla Viiveellinen systeemi: G TOT KP 1 K P Ts d Ke K 1 P P KP G2, OL () s G2, OL ( j) s1 j1 j1 T d j ( ) 1 1 G j K e j j T OL P d Ratkaistaan esim. Nyquistin diagrammilla MATLABissa (viive T d = 1, piirretään diagrammi K P :n arvolla 1)
51 Viiveellisen systeemin säätö sys=tf(1,[1 1]).4 Nyquist Diagram sys.inputdelay=1.2 w=logspace(-1,1,1)'; sys2=tf(1,[1 1]) nyquist(sys,sys2,w) Saadaan Nyquistin diagrammit: Imaginary Axis Viiveetön systeemi Viiveettömän järjestelmän vahvistusvara on ääretön Real Axis Viiveellisen järjestelmän vahvistusvara on 1/.4421 = 2.26 Eli viiveetön järjestelmä on stabiili kaikilla positiivisilla K P :n arvoilla ja viiveellinen järjestelmä on stabiili, kun K P < Simuloidaan kumpaakin järjestelmää -.8 Viiveellinen systeemi
52 Viiveellisen systeemin säätö Säädetyn, viiveellisen systeemin stabiisuus noudattaa Nyquistin kriteerillä määritetty stabiilisuusrajaa Kp =.4.5 Säätämättömät systeemit Kp = Kp =
Esimerkki: Laaduntasaussäiliö. Esimerkki: Laaduntasaussäiliö. Taajuusanalyysi. ELEC-C1230 Säätötekniikka. Luku 7: Taajuusanalyysi
 Taajuusanalyysi ELEC-C1230 Säätötekniikka Luku 7: Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
Taajuusanalyysi ELEC-C1230 Säätötekniikka Luku 7: Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
Esimerkki: Laaduntasaussäiliö. Esimerkki: Laaduntasaussäiliö. Taajuusanalyysi. ELEC-C1230 Säätötekniikka. Luku 7: Taajuusanalyysi
 Taajuusanalyysi ELEC-C1230 Säätötekniikka Luku 7: Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
Taajuusanalyysi ELEC-C1230 Säätötekniikka Luku 7: Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
3. kierros. 2. Lähipäivä
 3. kierros. Lähipäivä Viikon aihe (viikko /) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
3. kierros. Lähipäivä Viikon aihe (viikko /) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
Taajuustason tekniikat: Boden ja Nyquistin diagrammit, kompensaattorien suunnittelu. Vinkit 1 a
 ELEC-C3 Säätötekniikka 9. laskuharjoitus Taajuustason tekniikat: Boden ja Nyquistin diagrammit, kompensaattorien suunnittelu Vinkit a 3. Vaiheenjättökompensaattorin siirtofunktio: ( ) s W LAG s, a. s Vahvistus
ELEC-C3 Säätötekniikka 9. laskuharjoitus Taajuustason tekniikat: Boden ja Nyquistin diagrammit, kompensaattorien suunnittelu Vinkit a 3. Vaiheenjättökompensaattorin siirtofunktio: ( ) s W LAG s, a. s Vahvistus
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät helmikuu 2019 ENSO IKONEN PYOSYS
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät helmikuu 2019 ENSO IKONEN PYOSYS
ELEC-C1230 Säätötekniikka. Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit
 ELEC-C3 Säätötekniikka Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit Hyvyyskriteerit Aikaisemmilla luennoilla on havainnollistettu, miten systeemien
ELEC-C3 Säätötekniikka Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit Hyvyyskriteerit Aikaisemmilla luennoilla on havainnollistettu, miten systeemien
Hyvyyskriteerit. ELEC-C1230 Säätötekniikka. Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit
 Hyvyyskriteerit ELEC-C1230 Säätötekniikka Aikaisemmilla luennoilla on havainnollistettu, miten systeemien käyttäytymiseen voi vaikuttaa säätämällä niitä. Epästabiileista systeemeistä saadaan stabiileja,
Hyvyyskriteerit ELEC-C1230 Säätötekniikka Aikaisemmilla luennoilla on havainnollistettu, miten systeemien käyttäytymiseen voi vaikuttaa säätämällä niitä. Epästabiileista systeemeistä saadaan stabiileja,
Luento 7. LTI-järjestelmät
 Luento 7 Lineaaristen järjestelmien analyysi taajuustasossa Taajuusvaste Stabiilisuus..7 LTI-järjestelmät u(t) h(t) y(t) Tarkastellaan lineaarista aikainvarianttia järjestelmää n n m m d d d d yt () =
Luento 7 Lineaaristen järjestelmien analyysi taajuustasossa Taajuusvaste Stabiilisuus..7 LTI-järjestelmät u(t) h(t) y(t) Tarkastellaan lineaarista aikainvarianttia järjestelmää n n m m d d d d yt () =
H(s) + + _. Ymit(s) Laplace-tason esitykseksi on saatu (katso jälleen kalvot):
 + + _. Ymit(s) Laplace-tason esitykseksi on saatu (katso jälleen kalvot):") ELEC-C3 Säätötekniikka 5. laskuharjoitus Vastaukset Quiz: Luennon 4 luentokalvojen (luku 4) lopussa on esimerkki: Sähköpiiri (alkaa kalvon 39 tienoilla). Lue esimerkki huolellisesti ja vastaa seuraavaan:
ELEC-C3 Säätötekniikka 5. laskuharjoitus Vastaukset Quiz: Luennon 4 luentokalvojen (luku 4) lopussa on esimerkki: Sähköpiiri (alkaa kalvon 39 tienoilla). Lue esimerkki huolellisesti ja vastaa seuraavaan:
Systeemin käyttäytyminen. ELEC-C1230 Säätötekniikka. Systeemin navat ja nollat. Systeemin navat ja nollat
 Systeemin käyttäytyminen ELEC-C1230 Säätötekniikka Luku 5: Navat ja nollat, systeemin nopeus, stabiilisuus ja värähtelyt, Routh-Hurwitz-kriteeri Systeemin tai järjestelmän tärkein ominaisuus on stabiilisuus.
Systeemin käyttäytyminen ELEC-C1230 Säätötekniikka Luku 5: Navat ja nollat, systeemin nopeus, stabiilisuus ja värähtelyt, Routh-Hurwitz-kriteeri Systeemin tai järjestelmän tärkein ominaisuus on stabiilisuus.
Y Yhtälöparista ratkaistiin vuorotellen siirtofunktiot laittamalla muut tulot nollaan. = K K K M. s 2 3s 2 KK P
 Säädön kotitehtävä vk3 t. 1 a) { Y =G K P E H E=R K N N G M Y Yhtälöparista ratkaistiin vuorotellen siirtofunktiot laittamalla muut tulot nollaan. G R s = Y R = GK P s 1 = KK 1 GK P K N G P M s 2 3s 2
Säädön kotitehtävä vk3 t. 1 a) { Y =G K P E H E=R K N N G M Y Yhtälöparista ratkaistiin vuorotellen siirtofunktiot laittamalla muut tulot nollaan. G R s = Y R = GK P s 1 = KK 1 GK P K N G P M s 2 3s 2
Tehtävä 1. Vaihtoehtotehtävät.
 Kem-9.47 Prosessiautomaation perusteet Tentti.4. Tehtävä. Vaihtoehtotehtävät. Oikea vastaus +,5p, väärä vastaus -,5p ja ei vastausta p Maksimi +5,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA
Kem-9.47 Prosessiautomaation perusteet Tentti.4. Tehtävä. Vaihtoehtotehtävät. Oikea vastaus +,5p, väärä vastaus -,5p ja ei vastausta p Maksimi +5,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA
Luento 7. tietoverkkotekniikan laitos
 Luento 7 Luento 7 LTI järjestelmien taajuusalueen analyysi II 7. LTI järjestelmän taajuusvaste Vaste kompleksiselle eksponenttiherätteelle Taajuusvaste, Boden diagrammi 7.2 Signaalin muuntuminen LTI järjestelmässä
Luento 7 Luento 7 LTI järjestelmien taajuusalueen analyysi II 7. LTI järjestelmän taajuusvaste Vaste kompleksiselle eksponenttiherätteelle Taajuusvaste, Boden diagrammi 7.2 Signaalin muuntuminen LTI järjestelmässä
12. Stabiilisuus. Olkoon takaisinkytketyn vahvistimen vahvistus A F (s) :
 :") 1. Stabiilisuus Olkoon takaisinkytketyn vahvistimen vahvistus A F (s) : AOL ( s) AF ( s) (13 10) 1+ T ( s) A OL :n ja T:n määrittäminen kuvattiin oppikirjan 1-7 kappaleessa. Näiden taajuus käyttäytyminen
1. Stabiilisuus Olkoon takaisinkytketyn vahvistimen vahvistus A F (s) : AOL ( s) AF ( s) (13 10) 1+ T ( s) A OL :n ja T:n määrittäminen kuvattiin oppikirjan 1-7 kappaleessa. Näiden taajuus käyttäytyminen
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / systeemitekniikka Jan 019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / systeemitekniikka Jan 019
ELEC-C1230 Säätötekniikka 10. laskuharjoitus Taajuustason tekniikat: Boden ja Nyquistin diagrammit, kompensaattorien suunnittelu
 ELEC-C23 Säätötekniikka. laskuharjoitus Taajuustason tekniikat: Boden ja Nyquistin diagrait, kopensaattorien suunnittelu Quiz: Alla olevassa kuvassa on esitetty vaiheenjohtokopensaattorin siirtofunktio,
ELEC-C23 Säätötekniikka. laskuharjoitus Taajuustason tekniikat: Boden ja Nyquistin diagrait, kopensaattorien suunnittelu Quiz: Alla olevassa kuvassa on esitetty vaiheenjohtokopensaattorin siirtofunktio,
Osatentti
 Osatentti 3 1.4.016 Nimi: Opiskelijanumero: Ohjeet: Kirjoita vastaukset paperissa annettuun tilaan. Lisävastaustilaa on paperin lopussa. Käytä selvää käsialaa. Laskin EI ole sallittu. Tenttikaavasto jaetaan.
Osatentti 3 1.4.016 Nimi: Opiskelijanumero: Ohjeet: Kirjoita vastaukset paperissa annettuun tilaan. Lisävastaustilaa on paperin lopussa. Käytä selvää käsialaa. Laskin EI ole sallittu. Tenttikaavasto jaetaan.
1 PID-taajuusvastesuunnittelun esimerkki
 Enso Ikonen, Oulun yliopisto, systeemitekniikan laboratorio 2/23 Säätöjärjestelmien suunnittelu 23 PID-taajuusvastesuunnittelun esimerkki Tehtävänä on suunnitella säätö prosessille ( ) = = ( +)( 2 + )
Enso Ikonen, Oulun yliopisto, systeemitekniikan laboratorio 2/23 Säätöjärjestelmien suunnittelu 23 PID-taajuusvastesuunnittelun esimerkki Tehtävänä on suunnitella säätö prosessille ( ) = = ( +)( 2 + )
Osatentti
 Osatentti 2.8.205 Nimi: Opiskelijanumero: Ohjeet: Vastaa kysymyspaperiin ja kysymyksille varattuun tilaan. Laskin ei ole sallittu. Tenttikaavasto jaetaan. Kaavastoon EI merkintöjä. Palauta kaavasto tämän
Osatentti 2.8.205 Nimi: Opiskelijanumero: Ohjeet: Vastaa kysymyspaperiin ja kysymyksille varattuun tilaan. Laskin ei ole sallittu. Tenttikaavasto jaetaan. Kaavastoon EI merkintöjä. Palauta kaavasto tämän
Säätötekniikan matematiikan verkkokurssi, Matlab tehtäviä ja vastauksia 29.7.2002
 Matlab tehtäviä 1. Muodosta seuraavasta differentiaaliyhtälöstä siirtofuntio. Tämä differentiaaliyhtälö saattaisi kuvata esimerkiksi yksinkertaista vaimennettua jousi-massa systeemiä, johon on liitetty
Matlab tehtäviä 1. Muodosta seuraavasta differentiaaliyhtälöstä siirtofuntio. Tämä differentiaaliyhtälö saattaisi kuvata esimerkiksi yksinkertaista vaimennettua jousi-massa systeemiä, johon on liitetty
Elektroniikka, kierros 3
 Elektroniikka, kierros 3 1. a) Johda kuvan 1 esittämän takaisinkytketyn systeemin suljetun silmukan vahvistuksen f lauseke. b) Osoita, että kun silmukkavahvistus β 1, niin suljetun silmukan vahvistus f
Elektroniikka, kierros 3 1. a) Johda kuvan 1 esittämän takaisinkytketyn systeemin suljetun silmukan vahvistuksen f lauseke. b) Osoita, että kun silmukkavahvistus β 1, niin suljetun silmukan vahvistus f
Digitaalinen Signaalinkäsittely T0125 Luento 4-7.04.2006
 Digitaalinen Signaalinkäsittely T5 Luento 4-7.4.6 Jarkko.Vuori@evtek.fi Z-taso Z-taso on paljon käytetty graafinen esitystapa jonka avulla voidaan tarkastella signaalien taajuussisältöjä sekä järjestelmien
Digitaalinen Signaalinkäsittely T5 Luento 4-7.4.6 Jarkko.Vuori@evtek.fi Z-taso Z-taso on paljon käytetty graafinen esitystapa jonka avulla voidaan tarkastella signaalien taajuussisältöjä sekä järjestelmien
Luento 7. Järjestelmien kokoaminen osista
 Luento 7 Lineaaristen järjestelmien analyysi Järjestelmä yhdistelmät, takaisinkytkentä Taajuusvaste Stabiilisuus analyysi taajuustasossa 8..6 Järjestelmien kokoaminen osista Lineaaristen järjestelmien
Luento 7 Lineaaristen järjestelmien analyysi Järjestelmä yhdistelmät, takaisinkytkentä Taajuusvaste Stabiilisuus analyysi taajuustasossa 8..6 Järjestelmien kokoaminen osista Lineaaristen järjestelmien
Dynaamisten systeemien teoriaa. Systeemianalyysilaboratorio II
 Dynaamisten systeemien teoriaa Systeemianalyysilaboratorio II 15.11.2017 Vakiot, sisäänmenot, ulostulot ja häiriöt Mallin vakiot Systeemiparametrit annettuja vakioita, joita ei muuteta; esim. painovoiman
Dynaamisten systeemien teoriaa Systeemianalyysilaboratorio II 15.11.2017 Vakiot, sisäänmenot, ulostulot ja häiriöt Mallin vakiot Systeemiparametrit annettuja vakioita, joita ei muuteta; esim. painovoiman
1 Vastaa seuraaviin. b) Taajuusvasteen
 Taajuusvasteen") Vastaa seuraaviin a) Miten määritetään digitaalisen suodattimen taajuusvaste sekä amplitudi- ja vaihespektri? Tässä riittää sanallinen kuvaus. b) Miten viivästys vaikuttaa signaalin amplitudi- ja vaihespektriin?
Vastaa seuraaviin a) Miten määritetään digitaalisen suodattimen taajuusvaste sekä amplitudi- ja vaihespektri? Tässä riittää sanallinen kuvaus. b) Miten viivästys vaikuttaa signaalin amplitudi- ja vaihespektriin?
3. kierros. 1. Lähipäivä
 3. kierros 1. Lähipäivä Viikon aihe (viikko 1/2) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
3. kierros 1. Lähipäivä Viikon aihe (viikko 1/2) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
z muunnos ja sen soveltaminen LTI järjestelmien analysointiin
 z muunnos ja sen soveltaminen LTI järjestelmien analysointiin muunnoksella (eng. transform) on vastaava asema diskreettiaikaisten signaalien ja LTI järjestelmien analyysissä kuin Laplace muunnoksella jatkuvaaikaisten
z muunnos ja sen soveltaminen LTI järjestelmien analysointiin muunnoksella (eng. transform) on vastaava asema diskreettiaikaisten signaalien ja LTI järjestelmien analyysissä kuin Laplace muunnoksella jatkuvaaikaisten
1 Kompleksiluvut 1. y z = (x, y) Kuva 1: Euklidinen taso R 2
 Kuva 1: Euklidinen taso R 2") Sisältö 1 Kompleksiluvut 1 1.1 Määritelmä............................ 1 1. Kertolasku suorakulmaisissa koordinaateissa.......... 4 1.3 Käänteisluku ja jakolasku..................... 9 1.4 Esimerkkejä.............................
Sisältö 1 Kompleksiluvut 1 1.1 Määritelmä............................ 1 1. Kertolasku suorakulmaisissa koordinaateissa.......... 4 1.3 Käänteisluku ja jakolasku..................... 9 1.4 Esimerkkejä.............................
2. kierros. 2. Lähipäivä
 2. kierros 2. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Tavoitteet: tietää Yhden navan vasteen ekvivalentti kohinakaistaleveys Vastuksen terminen kohina Termit
2. kierros 2. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Tavoitteet: tietää Yhden navan vasteen ekvivalentti kohinakaistaleveys Vastuksen terminen kohina Termit
y z = (x, y) Kuva 1: Euklidinen taso R 2
 Kuva 1: Euklidinen taso R 2") Kompleksiluvut. Määritelmä Tarkastellaan euklidista tasoa R = {(, y), y R}. y y z = (, y) R Kuva : Euklidinen taso R Suorakulmaisessa koordinaatistossa on -akseli ja y-akseli. Luvut ja y ovat pisteen z
Kompleksiluvut. Määritelmä Tarkastellaan euklidista tasoa R = {(, y), y R}. y y z = (, y) R Kuva : Euklidinen taso R Suorakulmaisessa koordinaatistossa on -akseli ja y-akseli. Luvut ja y ovat pisteen z
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
ENSO IKONEN PYOSYS SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
Harjoitus 6: Simulink - Säätöteoria. Syksy 2006. Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1
 Harjoitus 6: Simulink - Säätöteoria Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen säätötekniikkaan Takaisinkytkennän
Harjoitus 6: Simulink - Säätöteoria Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen säätötekniikkaan Takaisinkytkennän
4. kierros. 1. Lähipäivä
 4. kierros 1. Lähipäivä Viikon aihe Taajuuskompensointi, operaatiovahvistin ja sen kytkennät Taajuuskompensaattorit Mitoitus Kontaktiopetusta: 8 h Kotitehtäviä: 4 h + 0 h Tavoitteet: tietää Operaatiovahvistimen
4. kierros 1. Lähipäivä Viikon aihe Taajuuskompensointi, operaatiovahvistin ja sen kytkennät Taajuuskompensaattorit Mitoitus Kontaktiopetusta: 8 h Kotitehtäviä: 4 h + 0 h Tavoitteet: tietää Operaatiovahvistimen
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Systeemitekniikan laboratorio Jan 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Systeemitekniikan laboratorio Jan 2019
Alias-ilmiö eli taajuuden laskostuminen
 Prosessiorientoituneet mallit Todellista hybridijärjestelmää ELEC-C1230 Säätötekniikka Luku 12: Näytteenottoteoreema ja jatkuvien säätimien diskreetit approksimaatiot Prosessiorientoituneet mallit katsotaan
Prosessiorientoituneet mallit Todellista hybridijärjestelmää ELEC-C1230 Säätötekniikka Luku 12: Näytteenottoteoreema ja jatkuvien säätimien diskreetit approksimaatiot Prosessiorientoituneet mallit katsotaan
z 1+i (a) f (z) = 3z 4 5z 3 + 2z (b) f (z) = z 4z + 1 f (z) = 12z 3 15z 2 + 2
 f (z) = 3z 4 5z 3 + 2z (b) f (z) = z 4z + 1 f (z) = 12z 3 15z 2 + 2") BM20A5700 - Integraauunnokset Harjoitus 2 1. Laske seuraavat raja-arvot. -kohta ratkeaa, kun pistät sekä yläkerran että alakerran muotoon (z z 1 )(z z 2 ), missä siis z 1 ja z 2 ovat näiden lausekkeiden
BM20A5700 - Integraauunnokset Harjoitus 2 1. Laske seuraavat raja-arvot. -kohta ratkeaa, kun pistät sekä yläkerran että alakerran muotoon (z z 1 )(z z 2 ), missä siis z 1 ja z 2 ovat näiden lausekkeiden
Säätötekniikkaa. Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla
 ohjaus, joka saa systeemin toimimaan halutulla tavalla") Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Aikatason vaste vs. siirtofunktio Tehtävä
 Aikatason vaste vs. siirtofunktio Tehtävä Millainen toisen kertaluvun siirtofunktio vastaa systeemiä jonka ylitys on 10% ja asettumisaika 4 min? Y s X s = 2 n s 2 2 2 n s n M p =e t r 1.8 n t s 4.6 n 1
Aikatason vaste vs. siirtofunktio Tehtävä Millainen toisen kertaluvun siirtofunktio vastaa systeemiä jonka ylitys on 10% ja asettumisaika 4 min? Y s X s = 2 n s 2 2 2 n s n M p =e t r 1.8 n t s 4.6 n 1
Matemaattinen Analyysi
 Vaasan yliopisto, kevät 01 / ORMS1010 Matemaattinen Analyysi. harjoitus, viikko 1 R1 ke 1 16 D11 (..) R to 10 1 D11 (..) 1. Määritä funktion y(x) MacLaurinin sarjan kertoimet, kun y(0) = ja y (x) = (x
Vaasan yliopisto, kevät 01 / ORMS1010 Matemaattinen Analyysi. harjoitus, viikko 1 R1 ke 1 16 D11 (..) R to 10 1 D11 (..) 1. Määritä funktion y(x) MacLaurinin sarjan kertoimet, kun y(0) = ja y (x) = (x
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka
SGN-1200 Signaalinkäsittelyn menetelmät Välikoe
 SGN-00 Signaalinkäsittelyn menetelmät Välikoe 9.3.009 Sivuilla - on. Älä vastaa siihen, jos et ollut ensimmäisessä välikokeessa. Tentin kysymykset ovat sivuilla 3-4. Vastaa vain jompaan kumpaan kokeeseen,
SGN-00 Signaalinkäsittelyn menetelmät Välikoe 9.3.009 Sivuilla - on. Älä vastaa siihen, jos et ollut ensimmäisessä välikokeessa. Tentin kysymykset ovat sivuilla 3-4. Vastaa vain jompaan kumpaan kokeeseen,
1 Kompleksiluvut. Kompleksiluvut 10. syyskuuta 2005 sivu 1 / 7
 Kompleksiluvut 10. syyskuuta 2005 sivu 1 / 7 1 Kompleksiluvut Lukualueiden laajennuksia voi lähestyä polynomiyhtälöiden ratkaisemisen kautta. Yhtälön x+1 = 0 ratkaisemiseksi tarvitaan negatiivisia lukuja.
Kompleksiluvut 10. syyskuuta 2005 sivu 1 / 7 1 Kompleksiluvut Lukualueiden laajennuksia voi lähestyä polynomiyhtälöiden ratkaisemisen kautta. Yhtälön x+1 = 0 ratkaisemiseksi tarvitaan negatiivisia lukuja.
Kompleksianalyysi, viikko 6
 Kompleksianalyysi, viikko 6 Jukka Kemppainen Mathematics Division Funktion erikoispisteet Määr. 1 Jos f on analyyttinen pisteen z 0 aidossa ympäristössä 0 < z z 0 < r jollakin r > 0, niin sanotaan, että
Kompleksianalyysi, viikko 6 Jukka Kemppainen Mathematics Division Funktion erikoispisteet Määr. 1 Jos f on analyyttinen pisteen z 0 aidossa ympäristössä 0 < z z 0 < r jollakin r > 0, niin sanotaan, että
Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C (s+1)(s+0.02) 50s+1
 Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C (s+1)(s+0.02) 50s+1") ENSO IKONEN PYOSYS Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C. 1 P(s) = -----------------(s+1)(s+0.02) C(s) = 50s+1 --------50s Piirrä vasteet asetusarvosta. Kommentoi
ENSO IKONEN PYOSYS Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C. 1 P(s) = -----------------(s+1)(s+0.02) C(s) = 50s+1 --------50s Piirrä vasteet asetusarvosta. Kommentoi
SGN-1200 Signaalinkäsittelyn menetelmät Välikoe
 SGN-100 Signaalinkäsittelyn menetelmät Välikoe 6.4.010 Sivuilla 1- on. Älä vastaa siihen, jos et ollut ensimmäisessä välikokeessa. Tentin kysymykset ovat sivuilla 3-4. Vastaa vain jompaan kumpaan kokeeseen,
SGN-100 Signaalinkäsittelyn menetelmät Välikoe 6.4.010 Sivuilla 1- on. Älä vastaa siihen, jos et ollut ensimmäisessä välikokeessa. Tentin kysymykset ovat sivuilla 3-4. Vastaa vain jompaan kumpaan kokeeseen,
SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS),
,") SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS), 5.2.2019 Tentin arvosteluperusteita: o Kurssin alku on osin kertausta SäAn ja prosessidynamiikkakursseista, jotka oletetaan
SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS), 5.2.2019 Tentin arvosteluperusteita: o Kurssin alku on osin kertausta SäAn ja prosessidynamiikkakursseista, jotka oletetaan
17. Differentiaaliyhtälösysteemien laadullista teoriaa.
 99 17. Differentiaaliyhtälösysteemien laadullista teoriaa. Differentiaaliyhtälön x'(t) = f(x(t),t), x(t) n määrittelemän systeemin sanotaan olevan autonominen, jos oikea puoli ei eksplisiittisesti riipu
99 17. Differentiaaliyhtälösysteemien laadullista teoriaa. Differentiaaliyhtälön x'(t) = f(x(t),t), x(t) n määrittelemän systeemin sanotaan olevan autonominen, jos oikea puoli ei eksplisiittisesti riipu
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / Systeemitekniikka Jan 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / Systeemitekniikka Jan 2019
ELEC-C1230 Säätötekniikka
 Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
a) z 1 + z 2, b) z 1 z 2, c) z 1 z 2, d) z 1 z 2 = 4+10i 4 = 10i 5 = 2i. 4 ( 1)
 z 1 + z 2, b) z 1 z 2, c) z 1 z 2, d) z 1 z 2 = 4+10i 4 = 10i 5 = 2i. 4 ( 1)") Matematiikan johdantokurssi, syksy 06 Harjoitus, ratkaisuista. Osoita, että kompleksilukujen yhteenlasku määriteltynä tasopisteiden kautta koordinaateittain on liitännäinen, so. z + (z + z ) = (z + z )
Matematiikan johdantokurssi, syksy 06 Harjoitus, ratkaisuista. Osoita, että kompleksilukujen yhteenlasku määriteltynä tasopisteiden kautta koordinaateittain on liitännäinen, so. z + (z + z ) = (z + z )
Analogiatekniikka. Analogiatekniikka
 1 Opintojakson osaamistavoitteet Opintojakson hyväksytysti suoritettuaan opiskelija: osaa soveltaa ja tulkita siirtofunktiota, askelvastetta, Bodediagrammia ja napa-nolla-kuvaajaa lineaarisen, dynaamisen
1 Opintojakson osaamistavoitteet Opintojakson hyväksytysti suoritettuaan opiskelija: osaa soveltaa ja tulkita siirtofunktiota, askelvastetta, Bodediagrammia ja napa-nolla-kuvaajaa lineaarisen, dynaamisen
SIGNAALITEORIAN KERTAUSTA 1
 SIGNAALITEORIAN KERTAUSTA 1 1 (26) Fourier-muunnos ja jatkuva spektri Spektri taajuuden funktiona on kompleksiarvoinen funktio, jonka esittäminen graafisesti edellyttää 3D-kuvaajan piirtämisen. Yleensä
SIGNAALITEORIAN KERTAUSTA 1 1 (26) Fourier-muunnos ja jatkuva spektri Spektri taajuuden funktiona on kompleksiarvoinen funktio, jonka esittäminen graafisesti edellyttää 3D-kuvaajan piirtämisen. Yleensä
Säätötekniikan ja signaalinkäsittelyn työkurssi
 Säätötekniikan ja signaalinkäsittelyn työkurssi Työ D102: Sinimuotoisen signaalin suodattaminen 0.4 op. Julius Luukko Lappeenrannan teknillinen yliopisto Sähkötekniikan osasto/säätötekniikan laboratorio
Säätötekniikan ja signaalinkäsittelyn työkurssi Työ D102: Sinimuotoisen signaalin suodattaminen 0.4 op. Julius Luukko Lappeenrannan teknillinen yliopisto Sähkötekniikan osasto/säätötekniikan laboratorio
Juuri 7 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty c) sin 50 = sin ( ) = sin 130 = 0,77
 sin 50 = sin ( ) = sin 130 = 0,77") Juuri 7 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty.5.07 Kertaus K. a) sin 0 = 0,77 b) cos ( 0 ) = cos 0 = 0,6 c) sin 50 = sin (80 50 ) = sin 0 = 0,77 d) tan 0 = tan (0 80 ) = tan 0 =,9 e)
Juuri 7 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty.5.07 Kertaus K. a) sin 0 = 0,77 b) cos ( 0 ) = cos 0 = 0,6 c) sin 50 = sin (80 50 ) = sin 0 = 0,77 d) tan 0 = tan (0 80 ) = tan 0 =,9 e)
KOMPLEKSILUVUT C. Rationaaliluvut Q. Irrationaaliluvut
 KOMPLEKSILUVUT C Luonnolliset luvut N Kokonaisluvut Z Rationaaliluvut Q Reaaliluvut R Kompleksi luvut C Negat kokonaisluvut Murtoluvut Irrationaaliluvut Imaginaariluvut Erilaisten yhtälöiden ratkaiseminen
KOMPLEKSILUVUT C Luonnolliset luvut N Kokonaisluvut Z Rationaaliluvut Q Reaaliluvut R Kompleksi luvut C Negat kokonaisluvut Murtoluvut Irrationaaliluvut Imaginaariluvut Erilaisten yhtälöiden ratkaiseminen
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät, Systeemitekniikka Feb 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät, Systeemitekniikka Feb 2019
Taajuus-, Fourier- ja spektraalianalyysi
 Taajuus-, Fourier- ja spektraalianalyysi Transientti- ja korrelaatioanalyysi tähtäävät impulssivasteen (askelvasteen) mallintamiseen Taajuus- Fourier- ja spektraalianalyysi tähtäävät systeemin taajuusominaisuuksien
Taajuus-, Fourier- ja spektraalianalyysi Transientti- ja korrelaatioanalyysi tähtäävät impulssivasteen (askelvasteen) mallintamiseen Taajuus- Fourier- ja spektraalianalyysi tähtäävät systeemin taajuusominaisuuksien
1. Viikko. K. Tuominen MApu II 1/17 17
 1. Viikko Keskeiset asiat ja tavoitteet: 1. Kompleksiluvut, kompleksitaso, polaariesitys, 2. Kompleksilukujen peruslaskutoimitukset, 3. Eulerin ja De Moivren kaavat, 4. Potenssi ja juuret, kompleksinen
1. Viikko Keskeiset asiat ja tavoitteet: 1. Kompleksiluvut, kompleksitaso, polaariesitys, 2. Kompleksilukujen peruslaskutoimitukset, 3. Eulerin ja De Moivren kaavat, 4. Potenssi ja juuret, kompleksinen
SMG-2100: SÄHKÖTEKNIIKKA. Kompleksilukujen hyödyntäminen vaihtosähköpiirien
 SMG-100: SÄHKÖTEKNIIKKA Kompleksilukujen hyödyntäminen vaihtosähköpiirien analyysissä Osoitin Trigonometrinen muoto Polaarimuoto Kompleksilukujen peruslaskutoimitukset Viime luennolla esitettiin, että
SMG-100: SÄHKÖTEKNIIKKA Kompleksilukujen hyödyntäminen vaihtosähköpiirien analyysissä Osoitin Trigonometrinen muoto Polaarimuoto Kompleksilukujen peruslaskutoimitukset Viime luennolla esitettiin, että
Numeeriset menetelmät
 Numeeriset menetelmät Luento 13 Ti 18.10.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 13 Ti 18.10.2011 p. 1/43 p. 1/43 Nopeat Fourier-muunnokset Fourier-sarja: Jaksollisen funktion esitys
Numeeriset menetelmät Luento 13 Ti 18.10.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 13 Ti 18.10.2011 p. 1/43 p. 1/43 Nopeat Fourier-muunnokset Fourier-sarja: Jaksollisen funktion esitys
Signaalit ja järjestelmät aika- ja taajuusalueissa
 Signaalit ja järjestelmät aika- ja taajuusalueissa Signaalit aika ja taajuusalueissa Muunnokset aika ja taajuusalueiden välillä Fourier sarja (jaksollinen signaali) Fourier muunnos (jaksoton signaali)
Signaalit ja järjestelmät aika- ja taajuusalueissa Signaalit aika ja taajuusalueissa Muunnokset aika ja taajuusalueiden välillä Fourier sarja (jaksollinen signaali) Fourier muunnos (jaksoton signaali)
521384A RADIOTEKNIIKAN PERUSTEET Harjoitus 3
 51384A RADIOTEKNIIKAN PERUSTEET Harjoitus 3 1. Tutkitaan mikroliuskajohtoa, jonka substraattina on kvartsi (ε r 3,8) ja jonka paksuus (h) on,15 mm. a) Mikä on liuskan leveyden w oltava, jotta ominaisimpedanssi
51384A RADIOTEKNIIKAN PERUSTEET Harjoitus 3 1. Tutkitaan mikroliuskajohtoa, jonka substraattina on kvartsi (ε r 3,8) ja jonka paksuus (h) on,15 mm. a) Mikä on liuskan leveyden w oltava, jotta ominaisimpedanssi
Taajuus-, Fourier- ja spektraalianalyysi
 Taajuus-, Fourier- ja spektraalianalyysi Transientti- ja korrelaatioanalyysi tähtäävät impulssivasteen (askelvasteen) mallintamiseen Kuvaus aikatasossa Taajuus- Fourier- ja spektraalianalyysi tähtäävät
Taajuus-, Fourier- ja spektraalianalyysi Transientti- ja korrelaatioanalyysi tähtäävät impulssivasteen (askelvasteen) mallintamiseen Kuvaus aikatasossa Taajuus- Fourier- ja spektraalianalyysi tähtäävät
2. kierros. 1. Lähipäivä
 2. kierros. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 + 4 tuntia Tavoitteet: tietää Yhden navan vasteen ekvivalentti
2. kierros. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 + 4 tuntia Tavoitteet: tietää Yhden navan vasteen ekvivalentti
Luento 8. Suodattimien käyttötarkoitus
 Luento 8 Lineaarinen suodatus Ideaaliset alipäästö, ylipäästö ja kaistanpäästösuodattimet Käytännölliset suodattimet 8..006 Suodattimien käyttötarkoitus Signaalikaistan ulkopuolisen kohinan ja häiriöiden
Luento 8 Lineaarinen suodatus Ideaaliset alipäästö, ylipäästö ja kaistanpäästösuodattimet Käytännölliset suodattimet 8..006 Suodattimien käyttötarkoitus Signaalikaistan ulkopuolisen kohinan ja häiriöiden
SGN Signaalinkäsittelyn perusteet Välikoe Heikki Huttunen
 SGN-11 Signaalinkäsittelyn perusteet Välikoe 3.5.16 Heikki Huttunen Laskimen käyttö sallittu. Muiden materiaalien käyttö ei sallittu. Tenttikysymyksiä ei tarvitse palauttaa. Sivuilla 1-3 on. Sivuilla 4-5
SGN-11 Signaalinkäsittelyn perusteet Välikoe 3.5.16 Heikki Huttunen Laskimen käyttö sallittu. Muiden materiaalien käyttö ei sallittu. Tenttikysymyksiä ei tarvitse palauttaa. Sivuilla 1-3 on. Sivuilla 4-5
MATLAB harjoituksia RST-säädöstä (5h)
") Digitaalinen säätöteoria MATLAB harjoituksia RST-säädöstä (5h) Enso Ikonen Oulun yliopisto, systeemitekniikan laboratorio November 25, 2008 Harjoituskerran sisältö kertausta (15 min) Napojensijoittelu
Digitaalinen säätöteoria MATLAB harjoituksia RST-säädöstä (5h) Enso Ikonen Oulun yliopisto, systeemitekniikan laboratorio November 25, 2008 Harjoituskerran sisältö kertausta (15 min) Napojensijoittelu
MATEMATIIKAN JAOS Kompleksianalyysi
 MATEMATIIKAN JAOS Kompleksianalyysi Harjoitustehtäviä, syksy 00. Määrää kompleksiluvun a) = 3 j + 3j, b) = j, + j c) = ( 3 3 3 j)( j) itseisarvo ja argumentti.. Määrää sellaiset reaaliluvut x ja y, että
MATEMATIIKAN JAOS Kompleksianalyysi Harjoitustehtäviä, syksy 00. Määrää kompleksiluvun a) = 3 j + 3j, b) = j, + j c) = ( 3 3 3 j)( j) itseisarvo ja argumentti.. Määrää sellaiset reaaliluvut x ja y, että
SMG-2100: SÄHKÖTEKNIIKKA
 SMG-2100: SÄHKÖTEKNIIKKA Vaihtosähkön teho kompleksinen teho S pätöteho P loisteho Q näennäisteho S Käydään läpi sinimuotoisiin sähkösuureisiin liittyviä tehotermejä. Määritellään kompleksinen teho, jonka
SMG-2100: SÄHKÖTEKNIIKKA Vaihtosähkön teho kompleksinen teho S pätöteho P loisteho Q näennäisteho S Käydään läpi sinimuotoisiin sähkösuureisiin liittyviä tehotermejä. Määritellään kompleksinen teho, jonka
Matlabin perusteet. 1. Käyttöliittymä:
 Matlabin perusteet Matlabin (MATrix LABoratory) perusfilosofia on, että se käsittelee kaikkia muuttujia matriiseina, joiden erikoistapauksia ovat vektorit ja skalaariluvut. Näin ollen se soveltuu erityisesti
Matlabin perusteet Matlabin (MATrix LABoratory) perusfilosofia on, että se käsittelee kaikkia muuttujia matriiseina, joiden erikoistapauksia ovat vektorit ja skalaariluvut. Näin ollen se soveltuu erityisesti
Mat Dynaaminen optimointi, mallivastaukset, kierros Vaimennetun heilurin tilanyhtälöt on esitetty luennolla: θ = g sin θ r θ
 Mat-48 Dynaaminen optimointi, mallivastaukset, kierros Vaimennetun heilurin tilanyhtälöt on esitetty luennolla: θ = g sin θ r θ L ẋ = x ẋ = g L sin x rx Epälineaarisen systeemin tasapainotiloja voidaan
Mat-48 Dynaaminen optimointi, mallivastaukset, kierros Vaimennetun heilurin tilanyhtälöt on esitetty luennolla: θ = g sin θ r θ L ẋ = x ẋ = g L sin x rx Epälineaarisen systeemin tasapainotiloja voidaan
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt
 MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Differentiaaliyhtälöt. osa 2 Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 1 R. Kangaslampi Matriisihajotelmista
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Differentiaaliyhtälöt. osa 2 Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 1 R. Kangaslampi Matriisihajotelmista
Laplace-muunnos: määritelmä
 Laplace-muunnos: määritelmä Olkoon f : [, [ R funktio. Funktion f Laplacen muunnos määritellään yhtälöllä F(s) = L(f) := f(t)e st dt edellyttäen, että integraali f(t)e st dt suppenee. Riittävä ehto integraalin
Laplace-muunnos: määritelmä Olkoon f : [, [ R funktio. Funktion f Laplacen muunnos määritellään yhtälöllä F(s) = L(f) := f(t)e st dt edellyttäen, että integraali f(t)e st dt suppenee. Riittävä ehto integraalin
Y (s) = G(s)(W (s) W 0 (s)). Tarkastellaan nyt tilannetta v(t) = 0, kun t < 3 ja v(t) = 1, kun t > 3. u(t) = K p y(t) K I
 = G(s)(W (s) W 0 (s)). Tarkastellaan nyt tilannetta v(t) = 0, kun t < 3 ja v(t) = 1, kun t > 3. u(t) = K p y(t) K I") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 6. harjoituksen ratkaisut. Laplace-tasossa saadaan annetulle venttiilille W (s) W (s)
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 6. harjoituksen ratkaisut. Laplace-tasossa saadaan annetulle venttiilille W (s) W (s)
6. Differentiaaliyhtälösysteemien laadullista teoriaa.
 1 MAT-13450 LAAJA MATEMATIIKKA 5 Tampereen teknillinen yliopisto Risto Silvennoinen Kevät 2010 6. Differentiaaliyhtälösysteemien laadullista teoriaa. Olemme keskittyneet tässä kurssissa ensimmäisen kertaluvun
1 MAT-13450 LAAJA MATEMATIIKKA 5 Tampereen teknillinen yliopisto Risto Silvennoinen Kevät 2010 6. Differentiaaliyhtälösysteemien laadullista teoriaa. Olemme keskittyneet tässä kurssissa ensimmäisen kertaluvun
SGN-1200 Signaalinkäsittelyn menetelmät, Tentti
 SGN-1200 Signaalinkäsittelyn menetelmät, Tentti 5.5.2008 Kirjoita nimesi ja opiskelijanumerosi jokaiseen paperiin. Vastauspaperit tullaan irrottamaan toisistaan. Jos tila ei riitä, jatka kääntöpuolelle
SGN-1200 Signaalinkäsittelyn menetelmät, Tentti 5.5.2008 Kirjoita nimesi ja opiskelijanumerosi jokaiseen paperiin. Vastauspaperit tullaan irrottamaan toisistaan. Jos tila ei riitä, jatka kääntöpuolelle
Harjoitus 1. Tehtävä 1. Malliratkaisut. f(t) = e (t α) cos(ω 0 t + β) L[f(t)] = f(t)e st dt = e st t+α cos(ω 0 t + β)dt.
![Harjoitus 1. Tehtävä 1. Malliratkaisut. f(t) = e (t α) cos(ω 0 t + β) L[f(t)] = f(t)e st dt = e st t+α cos(ω 0 t + β)dt.](/thumbs/95/125776102.jpg "Harjoitus 1. Tehtävä 1. Malliratkaisut. f(t) = e (t α) cos(ω 0 t + β) L[f(t)] = f(t)e st dt = e st t+α cos(ω 0 t + β)dt.") Harjoitus Malliratkaisut Tehtävä L[f(t)] ˆ f(t) e (t α) cos(ω t + β) f(t)e st dt ˆ e st t+α cos(ω t + β)dt cos(ω t + β) 2 (ej(ωt+β) + e j(ωt+β) ) L[f(t)] 2 eα 2 ˆ ˆ e st t+α (e j(ω t+β) + e j(ω t+β) )
Harjoitus Malliratkaisut Tehtävä L[f(t)] ˆ f(t) e (t α) cos(ω t + β) f(t)e st dt ˆ e st t+α cos(ω t + β)dt cos(ω t + β) 2 (ej(ωt+β) + e j(ωt+β) ) L[f(t)] 2 eα 2 ˆ ˆ e st t+α (e j(ω t+β) + e j(ω t+β) )
ELEC-C1230 Säätötekniikka
 Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
SGN-1200 Signaalinkäsittelyn menetelmät, Tentti
 SG-1200 Signaalinkäsittelyn menetelmät, Tentti 21.3.2006 Kirjoita nimesi ja opiskelijanumerosi jokaiseen paperiin. Vastauspaperit tullaan irrottamaan toisistaan. Jos tila ei riitä, jatka kääntöpuolelle
SG-1200 Signaalinkäsittelyn menetelmät, Tentti 21.3.2006 Kirjoita nimesi ja opiskelijanumerosi jokaiseen paperiin. Vastauspaperit tullaan irrottamaan toisistaan. Jos tila ei riitä, jatka kääntöpuolelle
SGN-1200 Signaalinkäsittelyn menetelmät, Tentti
 SG-1200 Signaalinkäsittelyn menetelmät, Tentti 24.4.2006 Kirjoita nimesi ja opiskelijanumerosi jokaiseen paperiin. Vastauspaperit tullaan irrottamaan toisistaan. Jos tila ei riitä, jatka kääntöpuolelle
SG-1200 Signaalinkäsittelyn menetelmät, Tentti 24.4.2006 Kirjoita nimesi ja opiskelijanumerosi jokaiseen paperiin. Vastauspaperit tullaan irrottamaan toisistaan. Jos tila ei riitä, jatka kääntöpuolelle
SGN-1200 Signaalinkäsittelyn menetelmät, Tentti
 SGN-1200 Signaalinkäsittelyn menetelmät, Tentti 18.3.2008 Kirjoita nimesi ja opiskelijanumerosi jokaiseen paperiin. Vastauspaperit tullaan irrottamaan toisistaan. Jos tila ei riitä, jatka kääntöpuolelle
SGN-1200 Signaalinkäsittelyn menetelmät, Tentti 18.3.2008 Kirjoita nimesi ja opiskelijanumerosi jokaiseen paperiin. Vastauspaperit tullaan irrottamaan toisistaan. Jos tila ei riitä, jatka kääntöpuolelle
Luento 14: Periodinen liike, osa 2. Vaimennettu värähtely Pakkovärähtely Resonanssi F t F r
 Luento 14: Periodinen liike, osa 2 Vaimennettu värähtely Pakkovärähtely Resonanssi θ F µ F t F r m g 1 / 20 Luennon sisältö Vaimennettu värähtely Pakkovärähtely Resonanssi 2 / 20 Vaimennettu värähtely
Luento 14: Periodinen liike, osa 2 Vaimennettu värähtely Pakkovärähtely Resonanssi θ F µ F t F r m g 1 / 20 Luennon sisältö Vaimennettu värähtely Pakkovärähtely Resonanssi 2 / 20 Vaimennettu värähtely
Tilaesityksen hallinta ja tilasäätö. ELEC-C1230 Säätötekniikka. Luku 6: Tilasäätö, tilaestimointi, saavutettavuus ja tarkkailtavuus
 Tilaesityksen hallinta ja tilasäätö ELEC-C1230 Säätötekniikka Luku 6: Tilasäätö, tilaestimointi, saavutettavuus ja tarkkailtavuus Edellisessä luvussa tarkasteltiin napoja ja nollia sekä niiden vaikutuksia
Tilaesityksen hallinta ja tilasäätö ELEC-C1230 Säätötekniikka Luku 6: Tilasäätö, tilaestimointi, saavutettavuus ja tarkkailtavuus Edellisessä luvussa tarkasteltiin napoja ja nollia sekä niiden vaikutuksia
Ratkaise tehtävä 1 ilman teknisiä apuvälineitä! 1. a) Yhdistä oikea funktio oikeaan kuvaajaan. (2p)
 Yhdistä oikea funktio oikeaan kuvaajaan. (2p)") Matematiikan TESTI 3, Maa7 Trigonometriset funktiot RATKAISUT Sievin lukio II jakso/07 VASTAA JOKAISEEN TEHTÄVÄÄN! MAOL/LIITE/taulukot.com JA LASKIN ON SALLITTU ELLEI TOISIN MAINITTU! TARKISTA TEHTÄVÄT
Matematiikan TESTI 3, Maa7 Trigonometriset funktiot RATKAISUT Sievin lukio II jakso/07 VASTAA JOKAISEEN TEHTÄVÄÄN! MAOL/LIITE/taulukot.com JA LASKIN ON SALLITTU ELLEI TOISIN MAINITTU! TARKISTA TEHTÄVÄT
Differentiaaliyhtälöt II, kevät 2017 Harjoitus 5
 Differentiaaliyhtälöt II, kevät 27 Harjoitus 5 Heikki Korpela 26. huhtikuuta 27 Tehtävä 2. Määrää seuraavan autonomisen systeemin kriittiset pisteet, ratakäyrät ja luonnostele systeemin aikakehitys: (t)
Differentiaaliyhtälöt II, kevät 27 Harjoitus 5 Heikki Korpela 26. huhtikuuta 27 Tehtävä 2. Määrää seuraavan autonomisen systeemin kriittiset pisteet, ratakäyrät ja luonnostele systeemin aikakehitys: (t)
LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi. Servokäyttö (0,9 op)
") LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi Servokäyttö (0,9 op) JOHDNTO Työssä tarkastellaan kestomagnetoitua tasavirtamoottoria. oneelle viritetään PI-säätäjä
LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi Servokäyttö (0,9 op) JOHDNTO Työssä tarkastellaan kestomagnetoitua tasavirtamoottoria. oneelle viritetään PI-säätäjä
Harjoitus Tarkastellaan luentojen Esimerkin mukaista työttömyysmallinnusta. Merkitään. p(t) = hintaindeksi, π(t) = odotettu inflaatio,
 = hintaindeksi, π(t) = odotettu inflaatio,") Differentiaaliyhtälöt, Kesä 06 Harjoitus 3 Kaikissa tehtävissä, joissa pitää tarkastella kriittisten pisteiden stabiliteettia, jos kyseessä on satulapiste, ilmoita myös satulauraratkaisun (tai kriittisessä
Differentiaaliyhtälöt, Kesä 06 Harjoitus 3 Kaikissa tehtävissä, joissa pitää tarkastella kriittisten pisteiden stabiliteettia, jos kyseessä on satulapiste, ilmoita myös satulauraratkaisun (tai kriittisessä
Juuri 6 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty Vastaus: Määrittelyehto on x 1 ja nollakohta x = 1.
 Juuri 6 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 4..6 Kokoavia tehtäviä ILMAN TEKNISIÄ APUVÄLINEITÄ. a) Funktion f( ) = määrittelyehto on +, eli. + Ratkaistaan funktion nollakohdat. f(
Juuri 6 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 4..6 Kokoavia tehtäviä ILMAN TEKNISIÄ APUVÄLINEITÄ. a) Funktion f( ) = määrittelyehto on +, eli. + Ratkaistaan funktion nollakohdat. f(
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys10 Kevät 010 Jukka Maalampi LUENTO 7 Harmonisen värähdysliikkeen energia Jousen potentiaalienergia on U k( x ) missä k on jousivakio ja Dx on poikkeama tasapainosta. Valitaan
Mekaniikan jatkokurssi Fys10 Kevät 010 Jukka Maalampi LUENTO 7 Harmonisen värähdysliikkeen energia Jousen potentiaalienergia on U k( x ) missä k on jousivakio ja Dx on poikkeama tasapainosta. Valitaan
5 Differentiaalilaskentaa
 5 Differentiaalilaskentaa 5.1 Raja-arvo Esimerkki 5.1. Rationaalifunktiota g(x) = x2 + x 2 x 1 ei ole määritelty nimittäjän nollakohdassa eli, kun x = 1. Funktio on kuitenkin määritelty kohdan x = 1 läheisyydessä.
5 Differentiaalilaskentaa 5.1 Raja-arvo Esimerkki 5.1. Rationaalifunktiota g(x) = x2 + x 2 x 1 ei ole määritelty nimittäjän nollakohdassa eli, kun x = 1. Funktio on kuitenkin määritelty kohdan x = 1 läheisyydessä.
Kompleksiluvut., 15. kesäkuuta /57
 Kompleksiluvut, 15. kesäkuuta 2017 1/57 Miksi kompleksilukuja? Reaaliluvut lukusuoran pisteet: Tiedetään, että 7 1 0 x 2 = 0 x = 0 1 7 x 2 = 1 x = 1 x = 1 x 2 = 7 x = 7 x = 7 x 2 = 1 ei ratkaisua reaalilukujen
Kompleksiluvut, 15. kesäkuuta 2017 1/57 Miksi kompleksilukuja? Reaaliluvut lukusuoran pisteet: Tiedetään, että 7 1 0 x 2 = 0 x = 0 1 7 x 2 = 1 x = 1 x = 1 x 2 = 7 x = 7 x = 7 x 2 = 1 ei ratkaisua reaalilukujen
SIGNAALITEORIAN KERTAUSTA OSA 1
 1 SIGNAALITEORIAN KERTAUSTA OSA 1 Millainen on signaalin spektri ja miten se lasketaan? SIGNAALIEN JA SPEKTRIN PERUSKÄSITTEITÄ 2 Spektri taajuuden funktiona on kompleksiarvoinen funktio, jonka graafinen
1 SIGNAALITEORIAN KERTAUSTA OSA 1 Millainen on signaalin spektri ja miten se lasketaan? SIGNAALIEN JA SPEKTRIN PERUSKÄSITTEITÄ 2 Spektri taajuuden funktiona on kompleksiarvoinen funktio, jonka graafinen
Y (z) = z-muunnos on lineaarinen kuten Laplace-muunnoskin
 = z-muunnos on lineaarinen kuten Laplace-muunnoskin") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 3. harjoituksen ratkaisut. Vapaan vasteen löytämiseksi asetetaan ohjaukseksi u(t)
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 3. harjoituksen ratkaisut. Vapaan vasteen löytämiseksi asetetaan ohjaukseksi u(t)
Derivoimalla kerran saadaan nopeus ja toisen kerran saadaan kiihtyvyys Ña r
 Vuka HT 4 Tehtävä. Lyhyenä alustuksena tehtävään johdetaan keskeiskiihtyvyys tasaisessa pyörimisessä. Meillä on ympyräradalla liikkuva kappale joka pyörii vakiokulmanopeudella ω dϕ säteellä r origosta.
Vuka HT 4 Tehtävä. Lyhyenä alustuksena tehtävään johdetaan keskeiskiihtyvyys tasaisessa pyörimisessä. Meillä on ympyräradalla liikkuva kappale joka pyörii vakiokulmanopeudella ω dϕ säteellä r origosta.
SGN-1200 Signaalinkäsittelyn menetelmät, Tentti
 SG-1200 Signaalinkäsittelyn menetelmät, Tentti 30.1.2006 Kirjoita nimesi ja opiskelijanumerosi jokaiseen paperiin. Vastauspaperit tullaan irrottamaan toisistaan. Jos tila ei riitä, jatka kääntöpuolelle
SG-1200 Signaalinkäsittelyn menetelmät, Tentti 30.1.2006 Kirjoita nimesi ja opiskelijanumerosi jokaiseen paperiin. Vastauspaperit tullaan irrottamaan toisistaan. Jos tila ei riitä, jatka kääntöpuolelle
FYSP105/2 VAIHTOVIRTAKOMPONENTIT. 1 Johdanto. 2 Teoreettista taustaa
 FYSP105/2 VAIHTOVIRTAKOMPONENTIT Työn tavoitteita o Havainnollistaa vaihtovirtapiirien toimintaa o Syventää ymmärtämystä aiheeseen liittyvästä fysiikasta 1 Johdanto Tasavirta oli 1900 luvun alussa kilpaileva
FYSP105/2 VAIHTOVIRTAKOMPONENTIT Työn tavoitteita o Havainnollistaa vaihtovirtapiirien toimintaa o Syventää ymmärtämystä aiheeseen liittyvästä fysiikasta 1 Johdanto Tasavirta oli 1900 luvun alussa kilpaileva
5. Z-muunnos ja lineaariset diskreetit systeemit. z n = z
 5. Z-muunnos ja lineaariset diskreetit systeemit Jono: (x(n)) n=0 = (x(0), x(1), x(2),..., x(n),...) Z-muunnos: X(z) = n=0 x(n)z n, jos sarja suppenee jossain kompleksitason osassa. Esim. 4. Ykkösjonon
5. Z-muunnos ja lineaariset diskreetit systeemit Jono: (x(n)) n=0 = (x(0), x(1), x(2),..., x(n),...) Z-muunnos: X(z) = n=0 x(n)z n, jos sarja suppenee jossain kompleksitason osassa. Esim. 4. Ykkösjonon
R = Ω. Jännite R:n yli suhteessa sisäänmenojännitteeseen on tällöin jännitteenjako = 1
 Fysiikan mittausmenetelmät I syksy 206 Laskuharjoitus 4. Merkitään kaapelin resistanssin ja kuormaksi kytketyn piirin sisäänmenoimpedanssia summana R 000.2 Ω. Jännite R:n yli suhteessa sisäänmenojännitteeseen
Fysiikan mittausmenetelmät I syksy 206 Laskuharjoitus 4. Merkitään kaapelin resistanssin ja kuormaksi kytketyn piirin sisäänmenoimpedanssia summana R 000.2 Ω. Jännite R:n yli suhteessa sisäänmenojännitteeseen
Differentiaaliyhtälön ratkaisu. ELEC-C1230 Säätötekniikka. Esimerkki: läpivirtaussäiliö. Esimerkki: läpivirtaussäiliö
 Differentiaaliyhtälön ratkaisu ELEC-C1230 Säätötekniikka Luku 3: Dynaamisen vasteen määrittäminen, Laplace-muunnos, siirtofunktio Systeemin ymmärtämisen ja hallinnan kannalta on olennaista tietää, miten
Differentiaaliyhtälön ratkaisu ELEC-C1230 Säätötekniikka Luku 3: Dynaamisen vasteen määrittäminen, Laplace-muunnos, siirtofunktio Systeemin ymmärtämisen ja hallinnan kannalta on olennaista tietää, miten