SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
|
|
|
- Jutta Palo
- 5 vuotta sitten
- Katselukertoja:
Transkriptio

1 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka Jan 2019
2
3
4
5
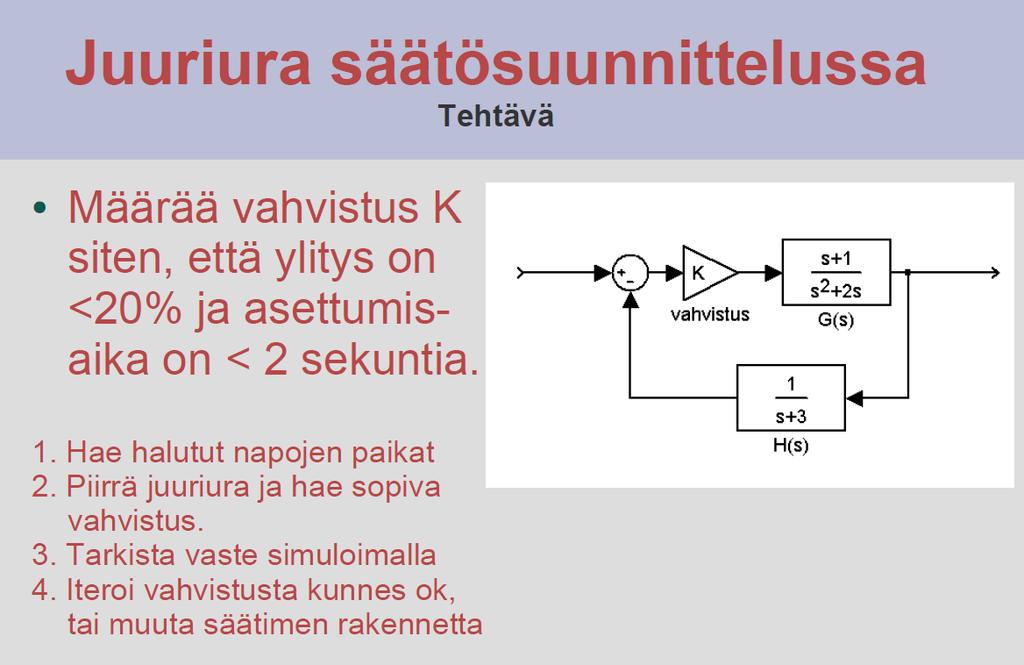
6 Prosessin parametrin a vaikutus suljetun piirin käyttäytymiseen? k G(s) = s(s+a) kirjoitetaan juuriuramuotoon 1 + a X(s) = 0 piirretään juuriura (a=0 Inf) >> rlocus(x) => suljetun piirin napojen sijainnit
7 ENSO IKONEN PYOSYS 7 Oppimistavoitteet Opiskelija... hahmottaa PID-säädön merkityksen teollisissa sovelluksissa näkee PID-säädön keinona muokata suljetun järjestelmän napoja, ja siten säädetyn järjestelmän käyttäytymistä tutustuu PID-säädön erilaisiin implementointeihin esitysmuodot toteutukset automaatiojärjestelmässä käyttön osana isompia säätörakenteita osaa itsenäisesti ohjelmoida PID-säätimen Matlab/Simulinkillä.
8 ENSO IKONEN PYOSYS 8 Säätöjärjestelmien suunnittelu SäSu PID-säädön rooli 4.3 PID-säädin 4.4 PID-säädön rakenteita 4.5 *PID-säädön vapausasteet 4.6 juuriuratekniikka PID-säädön analyysissä 4.2 PID-säädön rooli 4.3 PID-säädin P, I ja D-termit oppikirjamuoto, kaskadimuoto derivoinnin aikavakio navat ja nollat PID säätö Matlabilla (harjoituksissa)
9 PID-säädön rooli automaatiojärjestelmässä
 Säädin perustuu poikkeamaan P proportional I integral D derivative")
10 ENSO IKONEN PYOSYS Esimerkkejä säätöjärjestelmistä PID säätö (95% teollisuuden säätimistä) Säädin perustuu poikkeamaan P proportional I integral D derivative aikatasossa: Laplace-tasossa: Erikoistapaukset P-säätö PI-säätö PD-säätö u 1 t d t K e t e d e t C s U E s s I 0 D dt 1 Ds K 1 I s Ts 1
11 ENSO IKONEN PYOSYS P-säätö K P

12 4.3 P-säätö tasapainotilan poikkeama ENSO IKONEN PYOSYS 12
13 ENSO IKONEN PYOSYS PI-säätö K P (1+1/τ I s)
14 4.3 PI-säätö tasapainotilan poikkema
15 ENSO IKONEN PYOSYS PD-säätö K P (1+τ D s)

16 ENSO IKONEN PYOSYS PD-säätö K P (1+τ D s)
17 PID-säätö oppikirjamuoto
18 4.3 PID derivoinnin suodatus
19 4.3 PID-säädin rinnakkaismuoto, kaskadimuoto,...
20 4.3.1 PID-säädin kaksi nollaa ja napa origossa
21 ENSO IKONEN PYOSYS 21 Harjoitus PID-säädön ominaisuuksia Osoita, että....p-säädöllä voidaan asettaa suljetun piirin aikavakio halutuksi oleta ensimmäisen kertaluvun prosessi ja yksikkötakaisinkytkentä..pi-säädöllä päästään eroon tasapainotilan virheestä oleta yksikkötakaisinkytketty ensimmäisen kertaluvun prosessi Vastaukset kts. luku kts. luku 4.5.2
22 ENSO IKONEN PYOSYS 22 Harjoitus PID-säädön ominaisuuksia - ratkaisut Osoita, että P-säädöllä voidaan asettaa suljetun piirin aikavakio halutuksi Oleta ensimmäisen kertaluvun prosessi ja yksikkötakaisinkytkentä

23 ENSO IKONEN PYOSYS 23 Harjoitus PID-säädön ominaisuuksia - ratkaisut Osoita, että P-säädöllä voidaan asettaa suljetun piirin aikavakio halutuksi Oleta ensimmäisen kertaluvun prosessi ja yksikkötakaisinkytkentä Osoita, että PI-säädöllä päästään eroon tasapainotilan virheestä.
24 ENSO IKONEN PYOSYS 24 Harjoitus: Mikä on PD-säädetyn järjestelmän tasapainotilan poikkeama? C(s)P(s) Y(s) T(s) = = P(s)C(s) R(s) sisäänmeno on askel: R(s) = r ss /s y(t) = lim sy(s) t->inf s->0 C(s) = K(1+T D s) e(t) = r(t)-y(t) e(t->inf) =?
25 ENSO IKONEN PYOSYS 25 Säätöjärjestelmien suunnittelu SäSu PID-säädön rooli 4.3 PID-säätö 4.4 PID-säädön rakenteita 4.5 *PID-säädön vapausasteet 4.6 juuriuratekniikka PID-säädön analyysissä PID säätö Matlabilla (harjoituksissa) 4.4 PID-säädön rakenteita paikallinen PID kaskadisäätö anti-windup automaatiojärjestelmätoteutus 4.5 *Säädön vapausasteet P, PI, PID 4.6 juuriuratekniikka PID-säädön analyysissä
26 4.4 PID-säädön rakenteita L local (paikallinen asetusarvo) R remote (kaskadisäätö) C computer (ylemmän tason säätimeltä, järjestelmän ulkopuolelta)
 C computer (ylemmän tason säätimeltä, järjestelmän")
27 4.4 PID-säädön rakenteita L local (paikallinen asetusarvo) R remote (kaskadisäätö) C computer (ylemmän tason säätimeltä, järjestelmän ulkopuolelta)
28 4.4.1 PID kaskadisäätö (R)

29 4.4.1 PID suhdesäätö
30 4.4.2 *Wind-up



31 4.4.2 *Wind-up ulostulo ei saavuta asetusarvoa asetusarvon muutos ohjaus kasvaa (virheen integrointi) asetusarvon muutos ohjaussignaalin muutos viivästyy
32 4.4.2 *Anti-windup
33 4.5 *PID-säädön vapausasteet
34 4.6 PID-säädetyn prosessin juuriura Matlabilla s 3 i s 3 i 1 1 K D s s 2 s 3 K C s G >> G=tf(1,conv([1 2],[1 3])) >> C=tf(conv([1 3+i],[1 3-i]),[1 0]) 2.5 >> rlocus(c*g) 2 Root Locus 1.5 Imaginary Axis (seconds -1 ) Real Axis (seconds -1 )
 CMTS: PID http://ctms.engin.umich.")

35 ENSO IKONEN PYOSYS 35 CTMS ( CMTS: PID edu/ctms PID: C(s)=K p +K i /s+k d s Syötä P = 1/(s^2 +10*s+20) Simuloi P-säädettyä piiriä kun K p =300. Simuloi PD-säädettyä piiriä kun K p =300, K d =10. Simuloi PI-säädettyä piiriä kun K p =30, K i =70. Simuloi PID-säädettyä piiriä kun K p =350, K i =300, K d =50.
36 ENSO IKONEN PYOSYS 36 CTMS:PID CTMS: PID edu/ctms PID säädin Matlabilla (CTMS-ohje): >> Kp=1, Ki=1, Kd=1 >> s = tf( s ) >> C = Kp+Ki/s+Kd*s tai >> C = pid(kp,ki,kd) >> tf(c) % num/den muodossa Vaihtoehtoisesti voi ihan hyvin laskea siirtofunktiot käsin ja käyttää tf ja step komentoja(!) Matlab-tehtävät: Syötä prosessin siirtof. P = 1/(s^2 +10*s+20) Simuloi P-säädettyä piiriä kun K p =300. Simuloi PD-säädettyä piiriä kun K p =300, K d =10. Simuloi PI-säädettyä piiriä kun K p =30, K i =70. Simuloi PID-säädettyä piiriä kun K p =350, K i =300, K d =50. Tutustu pidtuneriin
37 ENSO IKONEN PYOSYS 37 P, PD, PI, PID Prosessi: >> P = 1/(s^2 +10*s+20) >> step(p) P-säätö >> Kp = 300 >> C = pid(kp) >> T = feedback(c*p,1) >> step(t) PD-säätö >> Kp = 300; Kd = 10 >> C = pid(kp,0,kd) >> T = feedback(c*p,1) >> step(t); PI-säätö >> Kp = 30, Ki=70 >> C = pid(kp,ki) >> T=feedback(C*P,1) >> step(t) PID-säätö >> Kp = 350 >> Ki = 300; Kd = 50 >> C = pid(kp,ki,kd) >> T =feedback(c*p,1) >> step(t) >> help pidtuner >> pidtuner(p, PI ) % esim.
38 ENSO IKONEN PYOSYS 38 Oppimistavoitteet Opiskelija... hahmottaa PID-säädön merkityksen teollisissa sovelluksissa näkee PID-säädön keinona muokata suljetun järjestelmän napoja, ja siten säädetyn järjestelmän käyttäytymistä tutustuu PID-säädön erilaisiin implementointeihin esitysmuodot toteutukset automaatiojärjestelmässä käyttön osana isompia säätörakenteita osaa itsenäisesti ohjelmoida PID-säätimen Matlab/Simulinkillä.
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Systeemitekniikan laboratorio Jan 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Systeemitekniikan laboratorio Jan 2019
Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C (s+1)(s+0.02) 50s+1
 Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C (s+1)(s+0.02) 50s+1") ENSO IKONEN PYOSYS Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C. 1 P(s) = -----------------(s+1)(s+0.02) C(s) = 50s+1 --------50s Piirrä vasteet asetusarvosta. Kommentoi
ENSO IKONEN PYOSYS Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C. 1 P(s) = -----------------(s+1)(s+0.02) C(s) = 50s+1 --------50s Piirrä vasteet asetusarvosta. Kommentoi
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / systeemitekniikka Jan 019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / systeemitekniikka Jan 019
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / Systeemitekniikka Jan 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / Systeemitekniikka Jan 2019
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät, Systeemitekniikka Feb 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät, Systeemitekniikka Feb 2019
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät helmikuu 2019 ENSO IKONEN PYOSYS
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät helmikuu 2019 ENSO IKONEN PYOSYS
1 PID-taajuusvastesuunnittelun esimerkki
 Enso Ikonen, Oulun yliopisto, systeemitekniikan laboratorio 2/23 Säätöjärjestelmien suunnittelu 23 PID-taajuusvastesuunnittelun esimerkki Tehtävänä on suunnitella säätö prosessille ( ) = = ( +)( 2 + )
Enso Ikonen, Oulun yliopisto, systeemitekniikan laboratorio 2/23 Säätöjärjestelmien suunnittelu 23 PID-taajuusvastesuunnittelun esimerkki Tehtävänä on suunnitella säätö prosessille ( ) = = ( +)( 2 + )
SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS),
,") SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS), 5.2.2019 Tentin arvosteluperusteita: o Kurssin alku on osin kertausta SäAn ja prosessidynamiikkakursseista, jotka oletetaan
SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS), 5.2.2019 Tentin arvosteluperusteita: o Kurssin alku on osin kertausta SäAn ja prosessidynamiikkakursseista, jotka oletetaan
Aikatason vaste vs. siirtofunktio Tehtävä
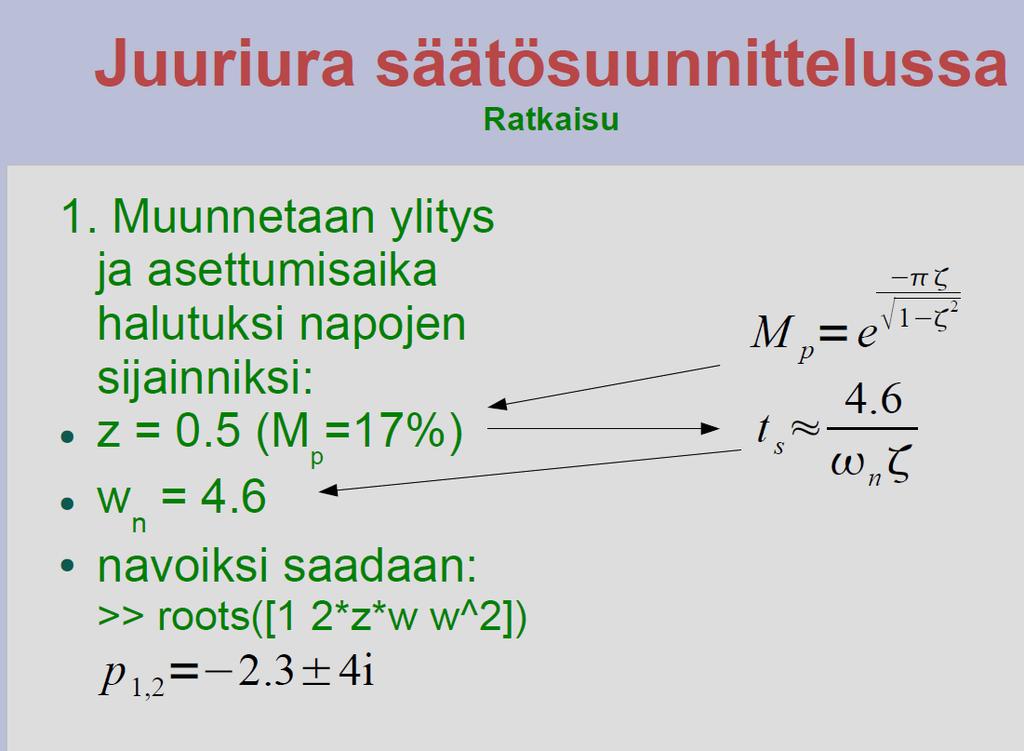
 Aikatason vaste vs. siirtofunktio Tehtävä Millainen toisen kertaluvun siirtofunktio vastaa systeemiä jonka ylitys on 10% ja asettumisaika 4 min? Y s X s = 2 n s 2 2 2 n s n M p =e t r 1.8 n t s 4.6 n 1
Aikatason vaste vs. siirtofunktio Tehtävä Millainen toisen kertaluvun siirtofunktio vastaa systeemiä jonka ylitys on 10% ja asettumisaika 4 min? Y s X s = 2 n s 2 2 2 n s n M p =e t r 1.8 n t s 4.6 n 1
MATLAB harjoituksia RST-säädöstä (5h)
") Digitaalinen säätöteoria MATLAB harjoituksia RST-säädöstä (5h) Enso Ikonen Oulun yliopisto, systeemitekniikan laboratorio November 25, 2008 Harjoituskerran sisältö kertausta (15 min) Napojensijoittelu
Digitaalinen säätöteoria MATLAB harjoituksia RST-säädöstä (5h) Enso Ikonen Oulun yliopisto, systeemitekniikan laboratorio November 25, 2008 Harjoituskerran sisältö kertausta (15 min) Napojensijoittelu
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
ENSO IKONEN PYOSYS SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
H(s) + + _. Ymit(s) Laplace-tason esitykseksi on saatu (katso jälleen kalvot):
 + + _. Ymit(s) Laplace-tason esitykseksi on saatu (katso jälleen kalvot):") ELEC-C3 Säätötekniikka 5. laskuharjoitus Vastaukset Quiz: Luennon 4 luentokalvojen (luku 4) lopussa on esimerkki: Sähköpiiri (alkaa kalvon 39 tienoilla). Lue esimerkki huolellisesti ja vastaa seuraavaan:
ELEC-C3 Säätötekniikka 5. laskuharjoitus Vastaukset Quiz: Luennon 4 luentokalvojen (luku 4) lopussa on esimerkki: Sähköpiiri (alkaa kalvon 39 tienoilla). Lue esimerkki huolellisesti ja vastaa seuraavaan:
ELEC-C1230 Säätötekniikka. Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit
 ELEC-C3 Säätötekniikka Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit Hyvyyskriteerit Aikaisemmilla luennoilla on havainnollistettu, miten systeemien
ELEC-C3 Säätötekniikka Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit Hyvyyskriteerit Aikaisemmilla luennoilla on havainnollistettu, miten systeemien
Tehtävä 1. Vaihtoehtotehtävät.
 Kem-9.47 Prosessiautomaation perusteet Tentti.4. Tehtävä. Vaihtoehtotehtävät. Oikea vastaus +,5p, väärä vastaus -,5p ja ei vastausta p Maksimi +5,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA
Kem-9.47 Prosessiautomaation perusteet Tentti.4. Tehtävä. Vaihtoehtotehtävät. Oikea vastaus +,5p, väärä vastaus -,5p ja ei vastausta p Maksimi +5,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA
Säätötekniikkaa. Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla
 ohjaus, joka saa systeemin toimimaan halutulla tavalla") Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
3. kierros. 2. Lähipäivä
 3. kierros. Lähipäivä Viikon aihe (viikko /) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
3. kierros. Lähipäivä Viikon aihe (viikko /) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
Säätötekniikan matematiikan verkkokurssi, Matlab tehtäviä ja vastauksia 29.7.2002
 Matlab tehtäviä 1. Muodosta seuraavasta differentiaaliyhtälöstä siirtofuntio. Tämä differentiaaliyhtälö saattaisi kuvata esimerkiksi yksinkertaista vaimennettua jousi-massa systeemiä, johon on liitetty
Matlab tehtäviä 1. Muodosta seuraavasta differentiaaliyhtälöstä siirtofuntio. Tämä differentiaaliyhtälö saattaisi kuvata esimerkiksi yksinkertaista vaimennettua jousi-massa systeemiä, johon on liitetty
Tietokoneavusteinen säätösuunnittelu (TASSU)
") Ohjeita ja esimerkkejä kurssin 470463A näyttökoetta varten Tietokoneavusteinen säätösuunnittelu (TASSU) Enso Ikonen 9/2006 Oulun yliopisto, Prosessi- ja ympäristötekniikan osasto, systeemitekniikan laboratorio
Ohjeita ja esimerkkejä kurssin 470463A näyttökoetta varten Tietokoneavusteinen säätösuunnittelu (TASSU) Enso Ikonen 9/2006 Oulun yliopisto, Prosessi- ja ympäristötekniikan osasto, systeemitekniikan laboratorio
Y (s) = G(s)(W (s) W 0 (s)). Tarkastellaan nyt tilannetta v(t) = 0, kun t < 3 ja v(t) = 1, kun t > 3. u(t) = K p y(t) K I
 = G(s)(W (s) W 0 (s)). Tarkastellaan nyt tilannetta v(t) = 0, kun t < 3 ja v(t) = 1, kun t > 3. u(t) = K p y(t) K I") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 6. harjoituksen ratkaisut. Laplace-tasossa saadaan annetulle venttiilille W (s) W (s)
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 6. harjoituksen ratkaisut. Laplace-tasossa saadaan annetulle venttiilille W (s) W (s)
Säätötekniikkaa. Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla
 ohjaus, joka saa systeemin toimimaan halutulla tavalla") Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Osatentti
 Osatentti 3 1.4.016 Nimi: Opiskelijanumero: Ohjeet: Kirjoita vastaukset paperissa annettuun tilaan. Lisävastaustilaa on paperin lopussa. Käytä selvää käsialaa. Laskin EI ole sallittu. Tenttikaavasto jaetaan.
Osatentti 3 1.4.016 Nimi: Opiskelijanumero: Ohjeet: Kirjoita vastaukset paperissa annettuun tilaan. Lisävastaustilaa on paperin lopussa. Käytä selvää käsialaa. Laskin EI ole sallittu. Tenttikaavasto jaetaan.
Harjoitus 6: Simulink - Säätöteoria. Syksy 2006. Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1
 Harjoitus 6: Simulink - Säätöteoria Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen säätötekniikkaan Takaisinkytkennän
Harjoitus 6: Simulink - Säätöteoria Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen säätötekniikkaan Takaisinkytkennän
Automaatiotekniikan laskentatyökalut (ALT)
") Ohjeita ja esimerkkejä kurssin 477604S näyttökoetta varten Automaatiotekniikan laskentatyökalut (ALT) Enso Ikonen 6/2008 Oulun yliopisto, Prosessi- ja ympäristötekniikan osasto, systeemitekniikan laboratorio
Ohjeita ja esimerkkejä kurssin 477604S näyttökoetta varten Automaatiotekniikan laskentatyökalut (ALT) Enso Ikonen 6/2008 Oulun yliopisto, Prosessi- ja ympäristötekniikan osasto, systeemitekniikan laboratorio
Hyvyyskriteerit. ELEC-C1230 Säätötekniikka. Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit
 Hyvyyskriteerit ELEC-C1230 Säätötekniikka Aikaisemmilla luennoilla on havainnollistettu, miten systeemien käyttäytymiseen voi vaikuttaa säätämällä niitä. Epästabiileista systeemeistä saadaan stabiileja,
Hyvyyskriteerit ELEC-C1230 Säätötekniikka Aikaisemmilla luennoilla on havainnollistettu, miten systeemien käyttäytymiseen voi vaikuttaa säätämällä niitä. Epästabiileista systeemeistä saadaan stabiileja,
Dynaamisten systeemien teoriaa. Systeemianalyysilaboratorio II
 Dynaamisten systeemien teoriaa Systeemianalyysilaboratorio II 15.11.2017 Vakiot, sisäänmenot, ulostulot ja häiriöt Mallin vakiot Systeemiparametrit annettuja vakioita, joita ei muuteta; esim. painovoiman
Dynaamisten systeemien teoriaa Systeemianalyysilaboratorio II 15.11.2017 Vakiot, sisäänmenot, ulostulot ja häiriöt Mallin vakiot Systeemiparametrit annettuja vakioita, joita ei muuteta; esim. painovoiman
LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi. Servokäyttö (0,9 op)
") LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi Servokäyttö (0,9 op) JOHDNTO Työssä tarkastellaan kestomagnetoitua tasavirtamoottoria. oneelle viritetään PI-säätäjä
LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi Servokäyttö (0,9 op) JOHDNTO Työssä tarkastellaan kestomagnetoitua tasavirtamoottoria. oneelle viritetään PI-säätäjä
SMITH-PREDICTOR Kompensaattori PI-Säätimellä. Funktiolohko Siemens PLC. SoftControl Oy
 SMITH-PREDICTOR Kompensaattori PI-Säätimellä Funktiolohko Siemens PLC SoftControl Oy 1.0 Smith Predictor kompensaattori PI-säätimellä... 3 1.1 Yleistä...3 1.2 Sovellus...3 1.3 Kuvaus...4 1.4 Muuttujat...5
SMITH-PREDICTOR Kompensaattori PI-Säätimellä Funktiolohko Siemens PLC SoftControl Oy 1.0 Smith Predictor kompensaattori PI-säätimellä... 3 1.1 Yleistä...3 1.2 Sovellus...3 1.3 Kuvaus...4 1.4 Muuttujat...5
Taajuustason tekniikat: Boden ja Nyquistin diagrammit, kompensaattorien suunnittelu. Vinkit 1 a
 ELEC-C3 Säätötekniikka 9. laskuharjoitus Taajuustason tekniikat: Boden ja Nyquistin diagrammit, kompensaattorien suunnittelu Vinkit a 3. Vaiheenjättökompensaattorin siirtofunktio: ( ) s W LAG s, a. s Vahvistus
ELEC-C3 Säätötekniikka 9. laskuharjoitus Taajuustason tekniikat: Boden ja Nyquistin diagrammit, kompensaattorien suunnittelu Vinkit a 3. Vaiheenjättökompensaattorin siirtofunktio: ( ) s W LAG s, a. s Vahvistus
z muunnos ja sen soveltaminen LTI järjestelmien analysointiin
 z muunnos ja sen soveltaminen LTI järjestelmien analysointiin muunnoksella (eng. transform) on vastaava asema diskreettiaikaisten signaalien ja LTI järjestelmien analyysissä kuin Laplace muunnoksella jatkuvaaikaisten
z muunnos ja sen soveltaminen LTI järjestelmien analysointiin muunnoksella (eng. transform) on vastaava asema diskreettiaikaisten signaalien ja LTI järjestelmien analyysissä kuin Laplace muunnoksella jatkuvaaikaisten
PID-sa a timen viritta minen Matlabilla ja simulinkilla
 PID-sa a timen viritta minen Matlabilla ja simulinkilla Kriittisen värähtelyn menetelmä Tehtiin kuvan 1 mukainen tasavirtamoottorin piiri PID-säätimellä. Virittämistä varten PID-säätimen ja asetettiin
PID-sa a timen viritta minen Matlabilla ja simulinkilla Kriittisen värähtelyn menetelmä Tehtiin kuvan 1 mukainen tasavirtamoottorin piiri PID-säätimellä. Virittämistä varten PID-säätimen ja asetettiin
Harjoitus 1. Tehtävä 1. Malliratkaisut. f(t) = e (t α) cos(ω 0 t + β) L[f(t)] = f(t)e st dt = e st t+α cos(ω 0 t + β)dt.
![Harjoitus 1. Tehtävä 1. Malliratkaisut. f(t) = e (t α) cos(ω 0 t + β) L[f(t)] = f(t)e st dt = e st t+α cos(ω 0 t + β)dt.](/thumbs/95/125776102.jpg "Harjoitus 1. Tehtävä 1. Malliratkaisut. f(t) = e (t α) cos(ω 0 t + β) L[f(t)] = f(t)e st dt = e st t+α cos(ω 0 t + β)dt.") Harjoitus Malliratkaisut Tehtävä L[f(t)] ˆ f(t) e (t α) cos(ω t + β) f(t)e st dt ˆ e st t+α cos(ω t + β)dt cos(ω t + β) 2 (ej(ωt+β) + e j(ωt+β) ) L[f(t)] 2 eα 2 ˆ ˆ e st t+α (e j(ω t+β) + e j(ω t+β) )
Harjoitus Malliratkaisut Tehtävä L[f(t)] ˆ f(t) e (t α) cos(ω t + β) f(t)e st dt ˆ e st t+α cos(ω t + β)dt cos(ω t + β) 2 (ej(ωt+β) + e j(ωt+β) ) L[f(t)] 2 eα 2 ˆ ˆ e st t+α (e j(ω t+β) + e j(ω t+β) )
(s 2 + 9)(s 2 + 2s + 5) ] + s + 1. s 2 + 2s + 5. Tästä saadaan tehtävälle ratkaisu käänteismuuntamalla takaisin aikatasoon:
![(s 2 + 9)(s 2 + 2s + 5) ] + s + 1. s 2 + 2s + 5. Tästä saadaan tehtävälle ratkaisu käänteismuuntamalla takaisin aikatasoon:](/thumbs/58/41295146.jpg "(s 2 + 9)(s 2 + 2s + 5) ] + s + 1. s 2 + 2s + 5. Tästä saadaan tehtävälle ratkaisu käänteismuuntamalla takaisin aikatasoon:") TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2429 Systeemien Identifiointi 2 harjoituksen ratkaisut Yhtälö voitaisiin ratkaista suoraankin, mutta käytetään Laplace-muunnosta tehtävän ratkaisemisessa
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2429 Systeemien Identifiointi 2 harjoituksen ratkaisut Yhtälö voitaisiin ratkaista suoraankin, mutta käytetään Laplace-muunnosta tehtävän ratkaisemisessa
Osatentti
 Osatentti 2.8.205 Nimi: Opiskelijanumero: Ohjeet: Vastaa kysymyspaperiin ja kysymyksille varattuun tilaan. Laskin ei ole sallittu. Tenttikaavasto jaetaan. Kaavastoon EI merkintöjä. Palauta kaavasto tämän
Osatentti 2.8.205 Nimi: Opiskelijanumero: Ohjeet: Vastaa kysymyspaperiin ja kysymyksille varattuun tilaan. Laskin ei ole sallittu. Tenttikaavasto jaetaan. Kaavastoon EI merkintöjä. Palauta kaavasto tämän
Agenda. Johdanto Säätäjiä. Mittaaminen. P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen
 8. Luento: Laitteiston ohjaaminen Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen Johdanto Tavoitteena: tunnistaa
8. Luento: Laitteiston ohjaaminen Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen Johdanto Tavoitteena: tunnistaa
Tilaesityksen hallinta ja tilasäätö. ELEC-C1230 Säätötekniikka. Luku 6: Tilasäätö, tilaestimointi, saavutettavuus ja tarkkailtavuus
 Tilaesityksen hallinta ja tilasäätö ELEC-C1230 Säätötekniikka Luku 6: Tilasäätö, tilaestimointi, saavutettavuus ja tarkkailtavuus Edellisessä luvussa tarkasteltiin napoja ja nollia sekä niiden vaikutuksia
Tilaesityksen hallinta ja tilasäätö ELEC-C1230 Säätötekniikka Luku 6: Tilasäätö, tilaestimointi, saavutettavuus ja tarkkailtavuus Edellisessä luvussa tarkasteltiin napoja ja nollia sekä niiden vaikutuksia
2. kierros. 1. Lähipäivä
 2. kierros. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 + 4 tuntia Tavoitteet: tietää Yhden navan vasteen ekvivalentti
2. kierros. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 + 4 tuntia Tavoitteet: tietää Yhden navan vasteen ekvivalentti
3. kierros. 1. Lähipäivä
 3. kierros 1. Lähipäivä Viikon aihe (viikko 1/2) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
3. kierros 1. Lähipäivä Viikon aihe (viikko 1/2) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
Lämpötilan säätö. S Elektroniset mittaukset Mikko Puranen Luennon sisältö
 Lämpötilan säätö S-108.2010 Elektroniset mittaukset Mikko Puranen 20.2.2006 Luennon sisältö 1. Termodynaaminen malli 2. Jäähdytyksen suunnittelu 3. Peltier-elementit 4. Lämpötilasäätäjät PID-säädin Termodynaaminen
Lämpötilan säätö S-108.2010 Elektroniset mittaukset Mikko Puranen 20.2.2006 Luennon sisältö 1. Termodynaaminen malli 2. Jäähdytyksen suunnittelu 3. Peltier-elementit 4. Lämpötilasäätäjät PID-säädin Termodynaaminen
Alias-ilmiö eli taajuuden laskostuminen
 Prosessiorientoituneet mallit Todellista hybridijärjestelmää ELEC-C1230 Säätötekniikka Luku 12: Näytteenottoteoreema ja jatkuvien säätimien diskreetit approksimaatiot Prosessiorientoituneet mallit katsotaan
Prosessiorientoituneet mallit Todellista hybridijärjestelmää ELEC-C1230 Säätötekniikka Luku 12: Näytteenottoteoreema ja jatkuvien säätimien diskreetit approksimaatiot Prosessiorientoituneet mallit katsotaan
Missä mennään. systeemi. identifiointi. mallikandidaatti. validointi. malli. (fysikaalinen) mallintaminen. mallin mallin käyttötarkoitus, reunaehdot
 mallintaminen. mallin mallin käyttötarkoitus, reunaehdot") Missä mennään systeemi mallin mallin käyttötarkoitus, reunaehdot käyttö- (fysikaalinen) mallintaminen luonnonlait yms. yms. identifiointi kokeita kokeita + päättely päättely vertailu mallikandidaatti validointi
Missä mennään systeemi mallin mallin käyttötarkoitus, reunaehdot käyttö- (fysikaalinen) mallintaminen luonnonlait yms. yms. identifiointi kokeita kokeita + päättely päättely vertailu mallikandidaatti validointi
ELEC-C1230 Säätötekniikka. Luku 7: Taajuusanalyysi
 ELEC-C123 Säätötekniikka Luku 7: Taajuusanalyysi Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
ELEC-C123 Säätötekniikka Luku 7: Taajuusanalyysi Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS SÄÄÖJÄRJESELMIEN SUUNNIELU Enso Ionen professori säätö- ja ssteemiteniia http://cc.oulu.fi/~io Oulun liopisto Äläät oneet ja järjestelmät helmiuu 209 ENSO IKONEN PYOSYS 2 Oppimistavoitteet
ENSO IKONEN PYOSYS SÄÄÖJÄRJESELMIEN SUUNNIELU Enso Ionen professori säätö- ja ssteemiteniia http://cc.oulu.fi/~io Oulun liopisto Äläät oneet ja järjestelmät helmiuu 209 ENSO IKONEN PYOSYS 2 Oppimistavoitteet
MASSASÄILIÖN SIMULOINTI JA SÄÄTÖ Simulation and control of pulp tank
 MASSASÄILIÖN SIMULOINTI JA SÄÄTÖ Simulation and control of pulp tank Sonja Lindman Kandidaatintyö 10.4.2014 LUT Energia Sähkötekniikan koulutusohjelma TIIVISTELMÄ Lappeenrannan teknillinen yliopisto Teknillinen
MASSASÄILIÖN SIMULOINTI JA SÄÄTÖ Simulation and control of pulp tank Sonja Lindman Kandidaatintyö 10.4.2014 LUT Energia Sähkötekniikan koulutusohjelma TIIVISTELMÄ Lappeenrannan teknillinen yliopisto Teknillinen

Harjoitus Etsi seuraavien autonomisten yhtälöiden kriittiset pisteet ja tutki niiden stabiliteettia:
 Differentiaaliyhtälöt, Kesä 216 Harjoitus 2 1. Etsi seuraavien autonomisten yhtälöiden kriittiset pisteet ja tutki niiden stabiliteettia: (a) y = (2 y) 3, (b) y = (y 1) 2, (c) y = 2y y 2. 2. Etsi seuraavien
Differentiaaliyhtälöt, Kesä 216 Harjoitus 2 1. Etsi seuraavien autonomisten yhtälöiden kriittiset pisteet ja tutki niiden stabiliteettia: (a) y = (2 y) 3, (b) y = (y 1) 2, (c) y = 2y y 2. 2. Etsi seuraavien
Säätötekniikan perusteet. Merja Mäkelä 3.3.2003 KyAMK
 Säätötekniikan perusteet Merja Mäkelä 3.3.2003 KyAMK Johdanto Instrumentointi automaation osana teollisuusprosessien hallinnassa Mittalaitteet - säätimet - toimiyksiköt Paperikoneella 500-1000 mittaus-,
Säätötekniikan perusteet Merja Mäkelä 3.3.2003 KyAMK Johdanto Instrumentointi automaation osana teollisuusprosessien hallinnassa Mittalaitteet - säätimet - toimiyksiköt Paperikoneella 500-1000 mittaus-,
Harjoitus 5: Simulink
 Harjoitus 5: Simulink Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen Simulinkiin Differentiaaliyhtälöiden
Harjoitus 5: Simulink Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen Simulinkiin Differentiaaliyhtälöiden
Moottorin säätö. Miikka Ihonen 67367P Sampo Salo 79543L Kalle Spoof 83912K John Boström 83962B Venla Viitanen 84514C
 Moottorin säätö Miikka Ihonen 67367P Sampo Salo 79543L Kalle Spoof 83912K John Boström 83962B Venla Viitanen 84514C Tehtävän määrittely Tehtävän aiheena on moottorin tyhjäkäynnin säätö. Tehtävässä tulee
Moottorin säätö Miikka Ihonen 67367P Sampo Salo 79543L Kalle Spoof 83912K John Boström 83962B Venla Viitanen 84514C Tehtävän määrittely Tehtävän aiheena on moottorin tyhjäkäynnin säätö. Tehtävässä tulee
Laplace-muunnos: määritelmä
 Laplace-muunnos: määritelmä Olkoon f : [, [ R funktio. Funktion f Laplacen muunnos määritellään yhtälöllä F(s) = L(f) := f(t)e st dt edellyttäen, että integraali f(t)e st dt suppenee. Riittävä ehto integraalin
Laplace-muunnos: määritelmä Olkoon f : [, [ R funktio. Funktion f Laplacen muunnos määritellään yhtälöllä F(s) = L(f) := f(t)e st dt edellyttäen, että integraali f(t)e st dt suppenee. Riittävä ehto integraalin
8. kierros. 1. Lähipäivä
 8. kierros 1. Lähipäivä Viikon aihe Tilaestimointi Tilasäätö Saavutettavuus, ohjattavuus Tarkkailtavuus, havaittavuus Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 tuntia Tavoitteet: tietää Saavutettavuus
8. kierros 1. Lähipäivä Viikon aihe Tilaestimointi Tilasäätö Saavutettavuus, ohjattavuus Tarkkailtavuus, havaittavuus Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 tuntia Tavoitteet: tietää Saavutettavuus
Järjestelmien kokoaminen osasysteemeistä. ELEC-C1230 Säätötekniikka. Lohkokaaviomuunnokset: Signaalit. Signaalin kulkeminen lohkon läpi
 Järjestelmien kokoaminen osasysteemeistä ELEC-C1230 Säätötekniikka Luku 4: Lohkokaaviomuunnokset, PID-säädin ja kompensaattorit, Edellisillä luennoilla on tarkasteltu yksittäisiä ilmiöitä ja niiden malleja
Järjestelmien kokoaminen osasysteemeistä ELEC-C1230 Säätötekniikka Luku 4: Lohkokaaviomuunnokset, PID-säädin ja kompensaattorit, Edellisillä luennoilla on tarkasteltu yksittäisiä ilmiöitä ja niiden malleja
Y (z) = z-muunnos on lineaarinen kuten Laplace-muunnoskin
 = z-muunnos on lineaarinen kuten Laplace-muunnoskin") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 3. harjoituksen ratkaisut. Vapaan vasteen löytämiseksi asetetaan ohjaukseksi u(t)
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 3. harjoituksen ratkaisut. Vapaan vasteen löytämiseksi asetetaan ohjaukseksi u(t)
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt
 MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Differentiaaliyhtälöt, osa 3 Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 28 R. Kangaslampi Matriisihajotelmista
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Differentiaaliyhtälöt, osa 3 Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 28 R. Kangaslampi Matriisihajotelmista
y (0) = 0 y h (x) = C 1 e 2x +C 2 e x e10x e 3 e8x dx + e x 1 3 e9x dx = e 2x 1 3 e8x 1 8 = 1 24 e10x 1 27 e10x = e 10x e10x
 = 0 y h (x) = C 1 e 2x +C 2 e x e10x e 3 e8x dx + e x 1 3 e9x dx = e 2x 1 3 e8x 1 8 = 1 24 e10x 1 27 e10x = e 10x e10x") BM0A5830 Differentiaaliyhtälöiden peruskurssi Harjoitus 4, Kevät 017 Päivityksiä: 1. Ratkaise differentiaaliyhtälöt 3y + 4y = 0 ja 3y + 4y = e x.. Ratkaise DY (a) 3y 9y + 6y = e 10x (b) Mikä on edellisen
BM0A5830 Differentiaaliyhtälöiden peruskurssi Harjoitus 4, Kevät 017 Päivityksiä: 1. Ratkaise differentiaaliyhtälöt 3y + 4y = 0 ja 3y + 4y = e x.. Ratkaise DY (a) 3y 9y + 6y = e 10x (b) Mikä on edellisen
Kon Hydraulijärjestelmät
 Kon-41.4040 Hydraulijärjestelmät Laboratorioharjoitus 2: Sähköhydraulisen järjestelmän säätö Jyri Juhala Jyrki Kajaste (Heikki Kauranne) Hydraulijärjestelmän venttiilin ohjausmenetelmät Ohjaus Kompensointi
Kon-41.4040 Hydraulijärjestelmät Laboratorioharjoitus 2: Sähköhydraulisen järjestelmän säätö Jyri Juhala Jyrki Kajaste (Heikki Kauranne) Hydraulijärjestelmän venttiilin ohjausmenetelmät Ohjaus Kompensointi
Dynaamisten systeemien identifiointi 1/2
 Dynaamisten systeemien identifiointi 1/2 Mallin rakentaminen mittausten avulla Epäparametriset menetelmät: tuloksena malli, joka ei perustu parametreille impulssi-, askel- tai taajusvaste siirtofunktion
Dynaamisten systeemien identifiointi 1/2 Mallin rakentaminen mittausten avulla Epäparametriset menetelmät: tuloksena malli, joka ei perustu parametreille impulssi-, askel- tai taajusvaste siirtofunktion
Y Yhtälöparista ratkaistiin vuorotellen siirtofunktiot laittamalla muut tulot nollaan. = K K K M. s 2 3s 2 KK P
 Säädön kotitehtävä vk3 t. 1 a) { Y =G K P E H E=R K N N G M Y Yhtälöparista ratkaistiin vuorotellen siirtofunktiot laittamalla muut tulot nollaan. G R s = Y R = GK P s 1 = KK 1 GK P K N G P M s 2 3s 2
Säädön kotitehtävä vk3 t. 1 a) { Y =G K P E H E=R K N N G M Y Yhtälöparista ratkaistiin vuorotellen siirtofunktiot laittamalla muut tulot nollaan. G R s = Y R = GK P s 1 = KK 1 GK P K N G P M s 2 3s 2
8. kierros. 2. Lähipäivä
 8. kierros 2. Lähipäivä Viikon aihe Tilaestimointi Tilasäätö Saavutettavuus, ohjattavuus Tarkkailtavuus, havaittavuus Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 tuntia Tavoitteet: tietää Saavutettavuus
8. kierros 2. Lähipäivä Viikon aihe Tilaestimointi Tilasäätö Saavutettavuus, ohjattavuus Tarkkailtavuus, havaittavuus Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 tuntia Tavoitteet: tietää Saavutettavuus
x = ( θ θ ia y = ( ) x.
 x.") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2429 Systeemien Identifiointi 5 harjoituksen ratkaisut Esitetään ensin systeemi tilayhtälömuodossa Tiloiksi valitaan
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2429 Systeemien Identifiointi 5 harjoituksen ratkaisut Esitetään ensin systeemi tilayhtälömuodossa Tiloiksi valitaan
4. kierros. 1. Lähipäivä
 4. kierros 1. Lähipäivä Viikon aihe Taajuuskompensointi, operaatiovahvistin ja sen kytkennät Taajuuskompensaattorit Mitoitus Kontaktiopetusta: 8 h Kotitehtäviä: 4 h + 0 h Tavoitteet: tietää Operaatiovahvistimen
4. kierros 1. Lähipäivä Viikon aihe Taajuuskompensointi, operaatiovahvistin ja sen kytkennät Taajuuskompensaattorit Mitoitus Kontaktiopetusta: 8 h Kotitehtäviä: 4 h + 0 h Tavoitteet: tietää Operaatiovahvistimen
Osa IX. Z muunnos. Johdanto Diskreetit funktiot
 Osa IX Z muunnos A.Rasila, J.v.Pfaler () Mat-.33 Matematiikan peruskurssi KP3-i 9. lokakuuta 2007 298 / 322 A.Rasila, J.v.Pfaler () Mat-.33 Matematiikan peruskurssi KP3-i 9. lokakuuta 2007 299 / 322 Johdanto
Osa IX Z muunnos A.Rasila, J.v.Pfaler () Mat-.33 Matematiikan peruskurssi KP3-i 9. lokakuuta 2007 298 / 322 A.Rasila, J.v.Pfaler () Mat-.33 Matematiikan peruskurssi KP3-i 9. lokakuuta 2007 299 / 322 Johdanto
ELEC-C1230 Säätötekniikka 10. laskuharjoitus Taajuustason tekniikat: Boden ja Nyquistin diagrammit, kompensaattorien suunnittelu
 ELEC-C23 Säätötekniikka. laskuharjoitus Taajuustason tekniikat: Boden ja Nyquistin diagrait, kopensaattorien suunnittelu Quiz: Alla olevassa kuvassa on esitetty vaiheenjohtokopensaattorin siirtofunktio,
ELEC-C23 Säätötekniikka. laskuharjoitus Taajuustason tekniikat: Boden ja Nyquistin diagrait, kopensaattorien suunnittelu Quiz: Alla olevassa kuvassa on esitetty vaiheenjohtokopensaattorin siirtofunktio,
Luento 8. Suodattimien käyttötarkoitus
 Luento 8 Lineaarinen suodatus Ideaaliset alipäästö, ylipäästö ja kaistanpäästösuodattimet Käytännölliset suodattimet 8..006 Suodattimien käyttötarkoitus Signaalikaistan ulkopuolisen kohinan ja häiriöiden
Luento 8 Lineaarinen suodatus Ideaaliset alipäästö, ylipäästö ja kaistanpäästösuodattimet Käytännölliset suodattimet 8..006 Suodattimien käyttötarkoitus Signaalikaistan ulkopuolisen kohinan ja häiriöiden
Dynaamisen järjestelmän siirtofunktio
 Dynaamisen järjestelmän siirtofunktio Nyt päästään soveltamaan matriisilaskentaa ja Laplace muunnosta. Tutkikaamme, miten lineaarista mallia voidaan käsitellä. Kuten edellä on jo nähty säätötekniikassa
Dynaamisen järjestelmän siirtofunktio Nyt päästään soveltamaan matriisilaskentaa ja Laplace muunnosta. Tutkikaamme, miten lineaarista mallia voidaan käsitellä. Kuten edellä on jo nähty säätötekniikassa
SIMULINK 5.0 Harjoitus. Matti Lähteenmäki 2004 www.tpu.fi/~mlahteen/
 SIMULINK 5.0 Harjoitus 2004 www.tpu.fi/~mlahteen/ SIMULINK 5.0 Harjoitus 2 Harjoitustehtävä. Tarkastellaan kuvan mukaisen yhden vapausasteen jousi-massa-vaimennin systeemin vaakasuuntaista pakkovärähtelyä,
SIMULINK 5.0 Harjoitus 2004 www.tpu.fi/~mlahteen/ SIMULINK 5.0 Harjoitus 2 Harjoitustehtävä. Tarkastellaan kuvan mukaisen yhden vapausasteen jousi-massa-vaimennin systeemin vaakasuuntaista pakkovärähtelyä,
Luentokalvot lämpötilasäätimistä Elektroniset mittaukset-kurssiin
 TEKNILLINEN KORKEAKOULU Sähkö- ja tietoliikennetekniikan osasto MIKES TKK Mittaustekniikka Luentokalvot lämpötilasäätimistä Elektroniset mittaukset-kurssiin 1.3.2006 DI Mikko Puranen Mittaustekniikan erikoistyö
TEKNILLINEN KORKEAKOULU Sähkö- ja tietoliikennetekniikan osasto MIKES TKK Mittaustekniikka Luentokalvot lämpötilasäätimistä Elektroniset mittaukset-kurssiin 1.3.2006 DI Mikko Puranen Mittaustekniikan erikoistyö
Suhteellisuusteorian perusteet 2017
 Suhteellisuusteorian perusteet 017 Harjoitus 5 esitetään laskuharjoituksissa viikolla 17 1. Tarkastellaan avaruusaikaa, jossa on vain yksi avaruusulottuvuus x. Nollasta poikkeavat metriikan komponentit
Suhteellisuusteorian perusteet 017 Harjoitus 5 esitetään laskuharjoituksissa viikolla 17 1. Tarkastellaan avaruusaikaa, jossa on vain yksi avaruusulottuvuus x. Nollasta poikkeavat metriikan komponentit
KOMPLEKSIANALYYSI I KURSSI SYKSY exp z., k = 1, 2,... Eksponenttifunktion z exp(z) Laurent-sarjan avulla
 Laurent-sarjan avulla") KOMPLEKSIANALYYSI I KURSSI SYKSY 2012 RITVA HURRI-SYRJÄNEN 11. Integrointi erillisen erikoispisteen ympäri Olkoot f analyyttinen punkteeratussa kiekossa D(z 0.r\{z 0 }. Funktiolla f on erikoispiste z 0.
KOMPLEKSIANALYYSI I KURSSI SYKSY 2012 RITVA HURRI-SYRJÄNEN 11. Integrointi erillisen erikoispisteen ympäri Olkoot f analyyttinen punkteeratussa kiekossa D(z 0.r\{z 0 }. Funktiolla f on erikoispiste z 0.
Analogiapiirit III. Keskiviikko , klo , TS127. Jatkuva-aikaiset IC-suodattimet ja PLL-rakenteet
 Oulun yliopisto Sähkötekniikan osasto Analogiapiirit III Harjoitus 8. Keskiviikko 5.2.2003, klo. 12.15-14.00, TS127. Jatkuva-aikaiset IC-suodattimet ja PLL-rakenteet 1. Mitoita kuvan 1 2. asteen G m -C
Oulun yliopisto Sähkötekniikan osasto Analogiapiirit III Harjoitus 8. Keskiviikko 5.2.2003, klo. 12.15-14.00, TS127. Jatkuva-aikaiset IC-suodattimet ja PLL-rakenteet 1. Mitoita kuvan 1 2. asteen G m -C
Pikaohje Aplisens APIS type 1X0 ja 2XO
 Pikaohje Aplisens APIS type 1X0 ja 2XO Koivupuistontie 26, 01510, Vantaa www.saato.fi, sales@saato.fi, 09-759 7850 Sisällys 1. Yleistä...3 2. Parametritilan toiminnot...4 3. Käyttöönotto pikaohje...5 1.
Pikaohje Aplisens APIS type 1X0 ja 2XO Koivupuistontie 26, 01510, Vantaa www.saato.fi, sales@saato.fi, 09-759 7850 Sisällys 1. Yleistä...3 2. Parametritilan toiminnot...4 3. Käyttöönotto pikaohje...5 1.
Hakkuritehola hteet Janne Askola Jari-Matti Hannula Jonas Nordfors Joni Kurvinen Semu Mäkinen
 Hakkuritehola hteet 4.5.2012 Janne Askola Jari-Matti Hannula Jonas Nordfors Joni Kurvinen Semu Mäkinen Fysikaalinen toiminta Buck-Boost -hakkuriteholähde on DC/DC -muunnin. Se on yhdistelmä Buck- ja Boost
Hakkuritehola hteet 4.5.2012 Janne Askola Jari-Matti Hannula Jonas Nordfors Joni Kurvinen Semu Mäkinen Fysikaalinen toiminta Buck-Boost -hakkuriteholähde on DC/DC -muunnin. Se on yhdistelmä Buck- ja Boost
SIGNAALITEORIAN KERTAUSTA 1
 SIGNAALITEORIAN KERTAUSTA 1 1 (26) Fourier-muunnos ja jatkuva spektri Spektri taajuuden funktiona on kompleksiarvoinen funktio, jonka esittäminen graafisesti edellyttää 3D-kuvaajan piirtämisen. Yleensä
SIGNAALITEORIAN KERTAUSTA 1 1 (26) Fourier-muunnos ja jatkuva spektri Spektri taajuuden funktiona on kompleksiarvoinen funktio, jonka esittäminen graafisesti edellyttää 3D-kuvaajan piirtämisen. Yleensä
VEKTORIANALYYSIN HARJOITUKSET: VIIKKO 4
 VEKTORIANALYYSIN HARJOITUKSET: VIIKKO 4 Jokaisen tehtävän jälkeen on pieni kommentti tehtävään liittyen Nämä eivät sisällä mitään kovin kriittistä tietoa tehtävään liittyen, joten niistä ei tarvitse välittää
VEKTORIANALYYSIN HARJOITUKSET: VIIKKO 4 Jokaisen tehtävän jälkeen on pieni kommentti tehtävään liittyen Nämä eivät sisällä mitään kovin kriittistä tietoa tehtävään liittyen, joten niistä ei tarvitse välittää
ELEC-C1230 Säätötekniikka
 Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
RAPORTTI Eemil Tamminen Markus Virtanen Pasi Vähämartti Säätötekniikan harjoitustyö Joulukuu 2007
 RAPORTTI Eemil Tamminen Markus Virtanen Pasi Vähämartti Säätötekniikan harjoitustyö Joulukuu 2007 Automaatiotekniikka Lähtöarvot: Säiliö T1: A = 500 x 600 mm, h = 500 mm Säiliö T2: Ø = 240 mm, h = 1000
RAPORTTI Eemil Tamminen Markus Virtanen Pasi Vähämartti Säätötekniikan harjoitustyö Joulukuu 2007 Automaatiotekniikka Lähtöarvot: Säiliö T1: A = 500 x 600 mm, h = 500 mm Säiliö T2: Ø = 240 mm, h = 1000
ELEC-C1230 Säätötekniikka
 Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
MS-A0207 Differentiaali- ja integraalilaskenta 2 Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio.
 MS-A0207 Differentiaali- ja integraalilaskenta 2 Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio. Riikka Korte Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto
MS-A0207 Differentiaali- ja integraalilaskenta 2 Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio. Riikka Korte Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto
x (t) = 2t ja y (t) = 3t 2 x (t) + + y (t) Lasketaan pari käyrän arvoa ja hahmotellaan kuvaaja: A 2 A 1
 = 2t ja y (t) = 3t 2 x (t) + + y (t) Lasketaan pari käyrän arvoa ja hahmotellaan kuvaaja: A 2 A 1") BM2A582 Integraalilaskenta ja sovellukset Harjoitus 6, Kevät 26 Kaikissa tehtävissä tärkeintä ja riittävää on saada oikea lauseke aikaiseksi. Useissa tehtävissä integraalit eivät tosin ole niin vaikeita
BM2A582 Integraalilaskenta ja sovellukset Harjoitus 6, Kevät 26 Kaikissa tehtävissä tärkeintä ja riittävää on saada oikea lauseke aikaiseksi. Useissa tehtävissä integraalit eivät tosin ole niin vaikeita
Signaalit ja järjestelmät aika- ja taajuusalueissa
 Signaalit ja järjestelmät aika- ja taajuusalueissa Signaalit aika ja taajuusalueissa Muunnokset aika ja taajuusalueiden välillä Fourier sarja (jaksollinen signaali) Fourier muunnos (jaksoton signaali)
Signaalit ja järjestelmät aika- ja taajuusalueissa Signaalit aika ja taajuusalueissa Muunnokset aika ja taajuusalueiden välillä Fourier sarja (jaksollinen signaali) Fourier muunnos (jaksoton signaali)
OPINTOJAKSO K0094 Integroidut järjestelmät 2ov
 OPINTOJAKSO K0094 Integroidut järjestelmät 2ov Sähkötekniset tietojärjestelmät, pakollinen sähkö-sv. Opiskelija perehtyy väyläpohjaisiin hajautettuihin avoimiin rakennusautomaatio-järjestelmiin.opiskeija
OPINTOJAKSO K0094 Integroidut järjestelmät 2ov Sähkötekniset tietojärjestelmät, pakollinen sähkö-sv. Opiskelija perehtyy väyläpohjaisiin hajautettuihin avoimiin rakennusautomaatio-järjestelmiin.opiskeija
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 4: Ketjusäännöt ja lineaarinen approksimointi
 Luento 4: Ketjusäännöt ja lineaarinen approksimointi") MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 4: Ketjusäännöt ja lineaarinen approksimointi Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0202 Syksy 2015 1
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 4: Ketjusäännöt ja lineaarinen approksimointi Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0202 Syksy 2015 1
Säätötekniikan alkeita
 Säätötekniikan alkeita Säätötekniikan avulla pyritään ohjaamaan erilaisia i i järjestelmiäj älyä sisältävällä menetelmällä. Tavoitteena on saada systeemi käyttäytymään halutulla tavalla luotettavasti,
Säätötekniikan alkeita Säätötekniikan avulla pyritään ohjaamaan erilaisia i i järjestelmiäj älyä sisältävällä menetelmällä. Tavoitteena on saada systeemi käyttäytymään halutulla tavalla luotettavasti,
Lukujonot Z-muunnos Z-muunnoksen ominaisuuksia Z-käänteismuunnos Differenssiyhtälöt. Z-muunnos. 5. joulukuuta Z-muunnos
 Lukujonot Z-muunnoksen ominaisuuksia Z-käänteismuunnos Differenssiyhtälöt 5. joulukuuta 2016 Lukujonot Z-muunnoksen ominaisuuksia Z-käänteismuunnos Differenssiyhtälöt Lukujonot Lukujonot Z-muunnoksen ominaisuuksia
Lukujonot Z-muunnoksen ominaisuuksia Z-käänteismuunnos Differenssiyhtälöt 5. joulukuuta 2016 Lukujonot Z-muunnoksen ominaisuuksia Z-käänteismuunnos Differenssiyhtälöt Lukujonot Lukujonot Z-muunnoksen ominaisuuksia
s 21.02.2005/BA 1(8) taajuusmuuttajalla
 taajuusmuuttajalla") s../ba () MM/MM- taajuusmuuttajalla Micro Master MM-taajuusmuuttajassa on sisäänrakennettu PID-säädin (MM, PI-säädin) jonka avulla voidaan ohjata erilaisia prosessisuureita kuten pinnakorkeuden-, paineen-,
s../ba () MM/MM- taajuusmuuttajalla Micro Master MM-taajuusmuuttajassa on sisäänrakennettu PID-säädin (MM, PI-säädin) jonka avulla voidaan ohjata erilaisia prosessisuureita kuten pinnakorkeuden-, paineen-,
f (28) L(28) = f (27) + f (27)(28 27) = = (28 27) 2 = 1 2 f (x) = x 2
 L(28) = f (27) + f (27)(28 27) = = (28 27) 2 = 1 2 f (x) = x 2") BMA581 - Differentiaalilaskenta ja sovellukset Harjoitus 4, Syksy 15 1. (a) Olisiko virhe likimain.5, ja arvio antaa siis liian suuren arvon. (b) Esim (1,1.5) tai (,.5). Funktion toinen derivaatta saa
BMA581 - Differentiaalilaskenta ja sovellukset Harjoitus 4, Syksy 15 1. (a) Olisiko virhe likimain.5, ja arvio antaa siis liian suuren arvon. (b) Esim (1,1.5) tai (,.5). Funktion toinen derivaatta saa
Lisämateriaalia: tilayhtälön ratkaisu, linearisointi. Matriisimuuttujan eksponenttifunktio:
 Lisämateriaalia: tilayhtälön ratkaisu, linearisinti Matriisimuuttujan ekspnenttifunkti: Kun A n neliömatriisi, niin määritellään 1 1 1 e I ta t A t A t A 2 6 i! At 2 2 3 3 i i jnka vidaan tdistaa knvergivan
Lisämateriaalia: tilayhtälön ratkaisu, linearisinti Matriisimuuttujan ekspnenttifunkti: Kun A n neliömatriisi, niin määritellään 1 1 1 e I ta t A t A t A 2 6 i! At 2 2 3 3 i i jnka vidaan tdistaa knvergivan
PD-säädin PID PID-säädin
 -äädin - äätö on ykinkertainen äätömuoto, jota voidaan kutua myö uhteuttavaki äädöki. Sinä lähtöignaali on uoraa uhteea tuloignaalin. -äätimen uhdealue kertoo kuinka paljon mittauuure aa muuttua ennen
-äädin - äätö on ykinkertainen äätömuoto, jota voidaan kutua myö uhteuttavaki äädöki. Sinä lähtöignaali on uoraa uhteea tuloignaalin. -äätimen uhdealue kertoo kuinka paljon mittauuure aa muuttua ennen
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio. Mat Systeemien Identifiointi. 4. harjoitus
 TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2.4129 Systeemien Identifiointi 4. harjoitus 1. a) Laske valkoisen kohinan spektraalitiheys. b) Tarkastellaan ARMA-prosessia C(q 1 )y = D(q 1 )e,
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2.4129 Systeemien Identifiointi 4. harjoitus 1. a) Laske valkoisen kohinan spektraalitiheys. b) Tarkastellaan ARMA-prosessia C(q 1 )y = D(q 1 )e,
1 Asentaminen. 2 Yleistä ja simuloinnin aloitus 12/2006 1.1.1
 1 Asentaminen...2 2 Yleistä ja simuloinnin aloitus...2 2.1 PI-säätimet...3 2.2 Trendit...4 3 Lämpölaitoksen ohjaus...5 4 Voimalan alkuarvojen muuttaminen...6 5 Tulostus...8 6 Mahdollisia ongelmia...8 6.1
1 Asentaminen...2 2 Yleistä ja simuloinnin aloitus...2 2.1 PI-säätimet...3 2.2 Trendit...4 3 Lämpölaitoksen ohjaus...5 4 Voimalan alkuarvojen muuttaminen...6 5 Tulostus...8 6 Mahdollisia ongelmia...8 6.1
1. Annettu siirtofunktio on siis G(s) ja vastaava systeemi on stabiili. Heräte (sisäänmeno) on u(t) = A sin(ωt), jonka Laplace-muunnos on
 ja vastaava systeemi on stabiili. Heräte (sisäänmeno) on u(t) = A sin(ωt), jonka Laplace-muunnos on") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Mat-419 Systeemien Identifiointi 8 harjoituksen ratkaisut 1 Annettu siirtofunktio on siis G(s) ja vastaava systeemi
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Mat-419 Systeemien Identifiointi 8 harjoituksen ratkaisut 1 Annettu siirtofunktio on siis G(s) ja vastaava systeemi
Prosessiautomaatiota LabVIEW lla NI Days NI Days LabVIEW DCS 1
 Prosessiautomaatiota LabVIEW lla NI Days 2011 12.10.2011 NI Days 2011 - LabVIEW DCS 1 Esityksen sisältö Prosessiautomaation vaatimuksia Tarpeelliset toimilohkot Automaatiosovelluksen suunnittelu LabVIEW
Prosessiautomaatiota LabVIEW lla NI Days 2011 12.10.2011 NI Days 2011 - LabVIEW DCS 1 Esityksen sisältö Prosessiautomaation vaatimuksia Tarpeelliset toimilohkot Automaatiosovelluksen suunnittelu LabVIEW
Normaaliryhmä. Toisen kertaluvun normaaliryhmä on yleistä muotoa
 Normaaliryhmä Toisen kertaluvun normaaliryhmä on yleistä muotoa x = u(t,x,y), y t I, = v(t,x,y), Funktiot u = u(t,x,y), t I ja v = v(t,x,y), t I ovat tunnettuja Toisen kertaluvun normaaliryhmän ratkaisu
Normaaliryhmä Toisen kertaluvun normaaliryhmä on yleistä muotoa x = u(t,x,y), y t I, = v(t,x,y), Funktiot u = u(t,x,y), t I ja v = v(t,x,y), t I ovat tunnettuja Toisen kertaluvun normaaliryhmän ratkaisu
VLT 6000 HVAC vakiopaineen säädössä ja paine-erosäädössä. (MBS 3000, 0-10V)
") VLT 6000 HVAC vakiopaineen säädössä ja paine-erosäädössä. (MBS 3000, 0-10V) 1 VLT 6000 HVAC Sovellusesimerkki 1 - Vakiopaineen säätö vedenjakelujärjestelmässä Vesilaitoksen vedenkysyntä vaihtelee runsaasti
VLT 6000 HVAC vakiopaineen säädössä ja paine-erosäädössä. (MBS 3000, 0-10V) 1 VLT 6000 HVAC Sovellusesimerkki 1 - Vakiopaineen säätö vedenjakelujärjestelmässä Vesilaitoksen vedenkysyntä vaihtelee runsaasti
Kon Simuloinnin Rakentaminen Janne Ojala
 Kon 16.4011 Simuloinnin Rakentaminen Janne Ojala Simulointi käytännössä 1/3 Simulaatiomalleja helppo analysoida Ymmärretään ongelmaa paremmin - Opitaan ymmärtämään koneen toimintaa ja siihen vaikuttavia
Kon 16.4011 Simuloinnin Rakentaminen Janne Ojala Simulointi käytännössä 1/3 Simulaatiomalleja helppo analysoida Ymmärretään ongelmaa paremmin - Opitaan ymmärtämään koneen toimintaa ja siihen vaikuttavia
KALLE LESKINEN KAUKOLÄMPÖVERKON ENERGIATEHOKKUUDEN PARANTAMINEN AJOTAPOJA JA SÄÄTÖRATKAISUJA KEHITTÄMÄLLÄ. Diplomityö
 KALLE LESKINEN KAUKOLÄMPÖVERKON ENERGIATEHOKKUUDEN PARANTAMINEN AJOTAPOJA JA SÄÄTÖRATKAISUJA KEHITTÄMÄLLÄ Diplomityö Tarkastaja: professori Matti Vilkko Tarkastaja ja aihe hyväksytty Teknillisten tieteiden
KALLE LESKINEN KAUKOLÄMPÖVERKON ENERGIATEHOKKUUDEN PARANTAMINEN AJOTAPOJA JA SÄÄTÖRATKAISUJA KEHITTÄMÄLLÄ Diplomityö Tarkastaja: professori Matti Vilkko Tarkastaja ja aihe hyväksytty Teknillisten tieteiden
Harjoitus 4: Differentiaaliyhtälöt (Matlab) MS-C2107 Sovelletun matematiikan tietokonetyöt 1
 MS-C2107 Sovelletun matematiikan tietokonetyöt 1") Harjoitus 4: Differentiaaliyhtälöt (Matlab) MS-C2107 Sovelletun matematiikan tietokonetyöt MS-C2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Matlab:n solver komento differentiaaliyhtöiden
Harjoitus 4: Differentiaaliyhtälöt (Matlab) MS-C2107 Sovelletun matematiikan tietokonetyöt MS-C2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Matlab:n solver komento differentiaaliyhtöiden
Elektroniikka, kierros 3
 Elektroniikka, kierros 3 1. a) Johda kuvan 1 esittämän takaisinkytketyn systeemin suljetun silmukan vahvistuksen f lauseke. b) Osoita, että kun silmukkavahvistus β 1, niin suljetun silmukan vahvistus f
Elektroniikka, kierros 3 1. a) Johda kuvan 1 esittämän takaisinkytketyn systeemin suljetun silmukan vahvistuksen f lauseke. b) Osoita, että kun silmukkavahvistus β 1, niin suljetun silmukan vahvistus f
z 1+i (a) f (z) = 3z 4 5z 3 + 2z (b) f (z) = z 4z + 1 f (z) = 12z 3 15z 2 + 2
 f (z) = 3z 4 5z 3 + 2z (b) f (z) = z 4z + 1 f (z) = 12z 3 15z 2 + 2") BM20A5700 - Integraauunnokset Harjoitus 2 1. Laske seuraavat raja-arvot. -kohta ratkeaa, kun pistät sekä yläkerran että alakerran muotoon (z z 1 )(z z 2 ), missä siis z 1 ja z 2 ovat näiden lausekkeiden
BM20A5700 - Integraauunnokset Harjoitus 2 1. Laske seuraavat raja-arvot. -kohta ratkeaa, kun pistät sekä yläkerran että alakerran muotoon (z z 1 )(z z 2 ), missä siis z 1 ja z 2 ovat näiden lausekkeiden
Esimerkki: Laaduntasaussäiliö. Esimerkki: Laaduntasaussäiliö. Taajuusanalyysi. ELEC-C1230 Säätötekniikka. Luku 7: Taajuusanalyysi
 Taajuusanalyysi ELEC-C1230 Säätötekniikka Luku 7: Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
Taajuusanalyysi ELEC-C1230 Säätötekniikka Luku 7: Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa