Luento 4 Georeferointi
|
|
|
- Jussi Saaristo
- 7 vuotta sitten
- Katselukertoja:
Transkriptio
1 Luento 4 Georeferointi 2008 Maa Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi) 2008 Maa Fotogrammetrian perusteet 2
2 Orientoinnit georeferoinnissa Sisäinen orientointi Ulkoinen orientointi yksi kuva suoraan maastomalliin kuvapari keskinäinen orientointi stereomalliksi stereomallin ulkoinen orientointi maastomallille 2008 Maa Fotogrammetrian perusteet 3 Georeferointi? Sijaintia koskevan tiedon liittäminen kuvaan ja kuvan liittäminen sijaintia koskevaan tietoon. Kuvan sijainti? Kohteen sijainti? Geo-kohde XYZ piste 3D mallilla maanpinta, rakennus,... Kuva xy piste kuvalla 2008 Maa Fotogrammetrian perusteet 4



3 Maaston koordinaatistot Satelliittipaikannus kuvauskoneen navigointi, WGS84 Maastopaikannus kartoitus, paikallinen koordinaatisto näkyvöitetään signaalein Kuva: Ossi Jokinen, Maanmittauslaitos 2008 Maa Fotogrammetrian perusteet 5 Kuvan georeferointi Georeferoinnissa kuvaan liitetään tiedot kameran sisäisestä ja ulkoisesta orientoinnista. Sisäinen orientointi kameravakio c pääpiste x O ja y O Ulkoinen orientointi kuvanottopaikka X O,Y O, ja Z O kierrot ja kallistukset, α,ν, ja κ, tai κ, φ, ja ω Maa Fotogrammetrian perusteet 6
4 Kamera Kuvavektori kamerakoordinaatistossa Maa Fotogrammetrian perusteet 7 Kuvavektori kamerasta kohteeseen Maa Fotogrammetrian perusteet 8
5 Kohteesta kuvalle Kollineaarisuusyhtälöt kuvahavaintojen ja kohdepisteiden välillä Maa Fotogrammetrian perusteet 9 Kuvalta kohteeseen Stereokuvauksen yleinen tapaus ja erityisesti silloin, kun on kyse kuvablokista Maa Fotogrammetrian perusteet 10
6 Eteenpäinleikkaus I Eteenpäinleikkauksella määritetään uuden kohdepisteen avaruuskoordinaatit. Toiminto kuuluu osana fotogrammetrian ns. päätehtävään eli kohteen rekonstruoimiseen kahden tai useamman sädekimpun avulla. Käsittelemme tässä fotogrammetrian päätehtävää stereokuvaparin tapauksessa Maa Fotogrammetrian perusteet 11 Eteenpäinleikkaus II Eteenpäinleikkaus tehdään orientoiduilta kuvilta. Orientointina käy joko kuvaparin keskinäinen orientointi mallikoordinaatistossa tai kummankin kuvan ulkoinen orientointi kohdekoordinaatistossa Maa Fotogrammetrian perusteet 12
7 2008 Maa Fotogrammetrian perusteet 13 Stereokuvaus I Stereokuvauksen normaalitapauksessa valitaan 3-D koordinaatistoksi kuvaparin toisen kameran kamerakoordinaatisto. Tällöin kiertomatriisi on yksikkömatriisi, toisen kuvan projektiokeskus pysyy origona, ja toisen kuvan projektiokeskus on (B, 0, 0). Kameravakion arvo eli yhteisen kuvatason etäisyys kuvakannasta on tässä c. Kameraoptiikan ja kuva-anturin virheet korjataan kuvahavainnoista Maa Fotogrammetrian perusteet 14
8 Stereokuvaus II Kohdepisteen 3-D koordinaatit lasketaan (X, Y, Z) ns. parallaksikaavalla, ensin Z, sen jälkeen kuvapisteen mittakaavaluku M, ja lopuksi X ja Y. Jos parallaksihavainnon virhe tunnetaan, sen likimääräinen vaikutus (dz) etäisyyshavaintoon voidaan laskea differentioidulla parallaksikaavalla Maa Fotogrammetrian perusteet 15 Eteenpäinleikkaus III 2008 Maa Fotogrammetrian perusteet 16
9 Eteenpäinleikkaus IV Vasemman ja oikean kuvan yhteys maastoon (kuvahavainnot p1 ja p2 sekä maastopiste P1=P2) 2008 Maa Fotogrammetrian perusteet 17 Eteenpäinleikkaus V Maastopiste on sama Mittakaava lasketaan etäisyydestä kuvakantaan -> on molemmille kuville sama Jos kuvat ovat stereokuvauksen normaalitapauksessa, ei ole pystyparallaksia y p1=y p2. Jos kamera on ollut sama molemmille kuville, kuvatason etäisyys projektiokeskuksesta on sama z p1=z p2. Ainoa ero on siis vaakasuunnassa Maa Fotogrammetrian perusteet 18
10 Eteenpäinleikkaus VI Ratkaisemme mittakaavan yhtälöryhmän auki kirjoitetuista yhtälöistä, joissa esiintyy x Maa Fotogrammetrian perusteet 19 Eteenpäinleikkaus VII Z p Jos ratkaistu mittakaava sijoitetaan alkuperäisiin yhtälöihin, saadaan Maastopisteen P etäisyys stereokuvaparin kuvakannasta saadaan kertomalla kameravakio c=-z mittakaavalla = Bc p xp 2008 Maa Fotogrammetrian perusteet 20


11 Eteenpäinleikkaus VIII X p Y p Pisteen P X ja Y koordinaatit saadaan vastaavasti mittakaavalaskuista. Tässä X on laskettu vasemman kuvan kautta. X = Y = B p B p xp xp x' y' 2008 Maa Fotogrammetrian perusteet 21 3D mittaus 2008 Maa Fotogrammetrian perusteet 22
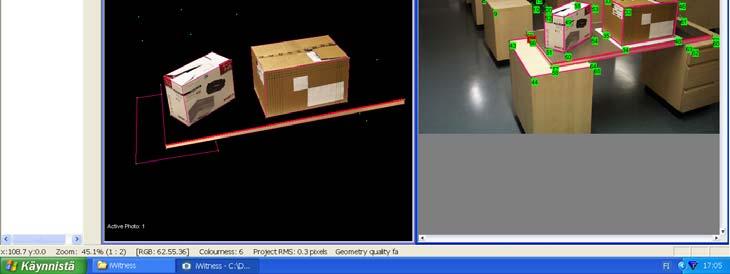
12 Laatikot I Oheisessa esimerkissä on kuvattu laatikoita pöydällä ja tarkoitus on mitata laatikoiden sekä alla olevan pöytälevyn päämitat. Mittaus tehdään havaitsemalla kohteiden nurkkapisteet kummaltakin kuvalta ja laskemalla sen jälkeen nurkkien 3-D koordinaatit. Päämitat lasketaan nurkkapisteiden avaruusetäisyyksinä Maa Fotogrammetrian perusteet 23 Laatikot II Kuvat on otettu digitaalikameralla, jonka kuvakoko on 1280 x 1024 pikseliä. Kameravakiona käytetään arvoa 1360 pikseliä, joka on määritetty etukäteen. Kuvapari on pyritty kuvaamaan stereokuvauksen normaalitapauksen mukaisesti ja kuvakanta on 0.62 m. Lisäksi mitattiin kameran projektiokeskuksen korkeus lattiatasosta, joka oli 1.58 m Maa Fotogrammetrian perusteet 24



13 Kuvapisteen mittaus 2008 Maa Fotogrammetrian perusteet 25 Kamerakoordinaatit 2008 Maa Fotogrammetrian perusteet 26


14 Parallaksikaavat Kohdekoordinaatit X, Y ja Z lasketaan kamerakoordinaateista x, y ja c joko -tai 2008 Maa Fotogrammetrian perusteet 27 Laatikot, kuvahavainnot Laatikko Maa Fotogrammetrian perusteet 28
15 Mittaushavainnot ja kamerakoordinaatit. Parallaksit on laskettu erotuksena px = x'' - x' (vaakaparallaksi). Jos kuvat olisi otettu tarkasti stereokuvauksen normaalitapauksen mukaisesti ja kuvista olisi korjattu kameraoptiikan aiheuttamat piirtovirheet, kuvien y'- jay''-koordinaatit olisivat kohdistustarkkuuden puitteissa samat py = y'' - y' => 0 (pystyparallaksi). Nyt niissä on jopa kymmenen pikselin suuruisia eroja. Tässä esimerkissä tällä ei ole merkitystä, koska tarkoitus on havainnollistaa 3-D koordinaattimittauksen periaatetta Maa Fotogrammetrian perusteet 29 Keskinäinen orientointi Tarkoissa mittaus- ja kartoitustehtävissä tunnetut kuvavirheet otetaan huomioon ja kuvapari oikaistaan normaaliasentoon ennen stereomittauksia (keskinäinen orientointi) Maa Fotogrammetrian perusteet 30
 ja laskettu niiden keskiarvot (S_mean).")
16 Laatikot, kohdekoordinaatit 2008 Maa Fotogrammetrian perusteet 31 Lasketut 3-D koordinaatit Koordinaatit on laskettu parallaksikaavoilla. Sen jälkeen päämitat on laskettu vinoina avaruusetäisyyksinä päätepisteiden koordinaattieroista (S_measured) ja laskettu niiden keskiarvot (S_mean). Tätä keskiarvoa on lopuksi verrattu siihen etäisyyteen, joka on mitattu mittanauhalla samasta päämitasta suoraan kohteella (S_true). Vertailusta nähdään, että tässä tapauksessa mittausepävarmuus on luokkaa 5-10 %, kun tällä samalla kuvaparilla se voisi tarkasti mitaten olla niinkin pieni kuin 0.01 % Maa Fotogrammetrian perusteet 32

17 2008 Maa Fotogrammetrian perusteet 33
Luento 4 Georeferointi Maa Fotogrammetrian perusteet 1
 Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 6: 3-D koordinaatit
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Luento 7 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 9 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Luento 3: Kuvahavainnot
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Luento 5: Stereoskooppinen mittaaminen
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Luento 7: Fotogrammetrinen mittausprosessi
 7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
Luento 2 Stereokuvan laskeminen. 2008 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 11: Stereomallin ulkoinen orientointi
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Luento 10 3-D maailma. fotogrammetriaan ja kaukokartoitukseen
 Luento 10 3-D maailma 1 Luennot 2007 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 10 3-D maailma 1 Luennot 2007 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 6: Stereo- ja jonomallin muodostaminen
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Fotogrammetrian termistöä
 Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Teoreettisia perusteita II
 Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Luento 8: Kolmiointi AIHEITA. Kolmiointi. Maa-57.301 Fotogrammetrian yleiskurssi. Luento-ohjelma 1 2 3 4 5 6 7 8 9 10
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Luento 7: Kuvan ulkoinen orientointi
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5. Stereomittauksen tarkkuus Maa Fotogrammetrian perusteet 1
 Luento 5 Stereomittauksen tarkkuus 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin
Luento 5 Stereomittauksen tarkkuus 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin
Luento Fotogrammetrian perusteet. Henrik Haggrén
 Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Luento 4: Kiertomatriisi
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
(Petri Rönnholm / Henrik Haggrén, ) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot.
 Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot.") Maa-57.301 Fotogrammetrian yleiskurssi (Petri Rönnholm / Henrik Haggrén, 12.9.2005) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot. Mitä pitäisi oppia? Palauttaa
Maa-57.301 Fotogrammetrian yleiskurssi (Petri Rönnholm / Henrik Haggrén, 12.9.2005) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot. Mitä pitäisi oppia? Palauttaa
Luento 2: Kuvakoordinaattien mittaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 14.9.2005) Luento 2: Kuvakoordinaattien mittaus Mitä pitäisi oppia? Muunnokset informaatiokanavassa (osin kertausta) Erotella kuvaan ja
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 14.9.2005) Luento 2: Kuvakoordinaattien mittaus Mitä pitäisi oppia? Muunnokset informaatiokanavassa (osin kertausta) Erotella kuvaan ja
Luento 7 Stereokartoituskojeet. 2007 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 7 Stereokartoituskojeet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2 Fotogrammetrinen prosessi 3 Stereokartoituskoje Stereokartoituskojeessa kuvaparin stereoskooppinen tarkastelu ja tarkka
Luento 7 Stereokartoituskojeet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2 Fotogrammetrinen prosessi 3 Stereokartoituskoje Stereokartoituskojeessa kuvaparin stereoskooppinen tarkastelu ja tarkka
Maa-57.260. Kameran kalibrointi. TKK/Fotogrammetria/PP
 Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 13.10.2004) Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus AIHEITA Stereomittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 13.10.2004) Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus AIHEITA Stereomittaus
MAA-C2001 Ympäristötiedon keruu
 MAA-C2001 Ympäristötiedon keruu Luento 1b Petri Rönnholm, Aalto-yliopisto 1 Laserkeilauksen, fotogrammetrian ja kaukokartoituksen harjoituksista Laserkeilausharjoitus Tarkempi aikataulu julkaistaan lähiaikoina
MAA-C2001 Ympäristötiedon keruu Luento 1b Petri Rönnholm, Aalto-yliopisto 1 Laserkeilauksen, fotogrammetrian ja kaukokartoituksen harjoituksista Laserkeilausharjoitus Tarkempi aikataulu julkaistaan lähiaikoina
Ilmakolmioinnin laadunvalvonta fotogrammetristen pintamallien ja laserkeilausaineiston avulla
 Ilmakolmioinnin laadunvalvonta fotogrammetristen pintamallien ja laserkeilausaineiston avulla Aalto-yliopiston insinööritieteiden korkeakoulun maankäyttötieteiden laitoksella tehty diplomityö Espoo, toukokuu
Ilmakolmioinnin laadunvalvonta fotogrammetristen pintamallien ja laserkeilausaineiston avulla Aalto-yliopiston insinööritieteiden korkeakoulun maankäyttötieteiden laitoksella tehty diplomityö Espoo, toukokuu
Luento 6 Mittausten suunnittelu II. erikoissovellukset
 Luento 6 Mittausten suunnittelu II 1 Aiheita Mittausongelman määrittely Tarkkuusluvut Suhteellinen tarkkuusluku Suhteellinen tarkkuus Tarkkuuden arvioiminen Kuvahavainnon keskivirhe Verkon rakennevakio
Luento 6 Mittausten suunnittelu II 1 Aiheita Mittausongelman määrittely Tarkkuusluvut Suhteellinen tarkkuusluku Suhteellinen tarkkuus Tarkkuuden arvioiminen Kuvahavainnon keskivirhe Verkon rakennevakio
Luento 4: Kuvien geometrinen tulkinta
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kuvien geometrinen tulkinta AIHEITA Muunnokset informaatiokanavassa Geometrisen tulkinnan vaihtoehdot Mittakaava
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kuvien geometrinen tulkinta AIHEITA Muunnokset informaatiokanavassa Geometrisen tulkinnan vaihtoehdot Mittakaava
Maa-57.1030 Fotogrammetrian perusteet
 Maa-57.1030 Fotogrammetrian perusteet Luento 8 Kartoitussovellukset Petri Rönnholm/Henrik Haggrén Mitä fotogrammetrisella kartoituksella tuotetaan? 3D koordinaatteja kohteesta Maaston korkeusmalli Topograafiset
Maa-57.1030 Fotogrammetrian perusteet Luento 8 Kartoitussovellukset Petri Rönnholm/Henrik Haggrén Mitä fotogrammetrisella kartoituksella tuotetaan? 3D koordinaatteja kohteesta Maaston korkeusmalli Topograafiset
Luento 7 Stereokartoituskojeet Maa Fotogrammetrian perusteet 1
 Luento 7 Stereokartoituskojeet 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2008 Maa-57.1030 Fotogrammetrian perusteet 2 Fotogrammetrinen prosessi 2008
Luento 7 Stereokartoituskojeet 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2008 Maa-57.1030 Fotogrammetrian perusteet 2 Fotogrammetrinen prosessi 2008
Differentiaali- ja integraalilaskenta 2 (CHEM) MS-A0207 Hakula/Vuojamo Kurssitentti, 12.2, 2018, arvosteluperusteet
 MS-A0207 Hakula/Vuojamo Kurssitentti, 12.2, 2018, arvosteluperusteet") ifferentiaali- ja integraalilaskenta 2 (CHEM) MS-A27 Hakula/Vuojamo Kurssitentti, 2.2, 28, arvosteluperusteet T Moniosaisten tehtävien osien painoarvo on sama ellei muuta ole erikseen osoitettu. Kokeessa
ifferentiaali- ja integraalilaskenta 2 (CHEM) MS-A27 Hakula/Vuojamo Kurssitentti, 2.2, 28, arvosteluperusteet T Moniosaisten tehtävien osien painoarvo on sama ellei muuta ole erikseen osoitettu. Kokeessa
Luento 3: 3D katselu. Sisältö
 Tietokonegrafiikan perusteet T-.43 3 op Luento 3: 3D katselu Lauri Savioja Janne Kontkanen /27 3D katselu / Sisältö Kertaus: koordinaattimuunnokset ja homogeeniset koordinaatit Näkymänmuodostus Kameran
Tietokonegrafiikan perusteet T-.43 3 op Luento 3: 3D katselu Lauri Savioja Janne Kontkanen /27 3D katselu / Sisältö Kertaus: koordinaattimuunnokset ja homogeeniset koordinaatit Näkymänmuodostus Kameran
Tekijä Pitkä matematiikka Pisteen (x, y) etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.
 etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.") Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
Tekijä Pitkä matematiikka
 K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
Luento 4 Kolmiulotteiset kuvat. fotogrammetriaan ja kaukokartoitukseen
 Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Luento 3: Keskusprojektiokuvaus
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 11.3.2003, Päivityksiä: Katri Koistinen, 20.1.2004) Luento 3: Keskusprojektiokuvaus
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 11.3.2003, Päivityksiä: Katri Koistinen, 20.1.2004) Luento 3: Keskusprojektiokuvaus
Vanhoja koetehtäviä. Analyyttinen geometria 2016
 Vanhoja koetehtäviä Analyyttinen geometria 016 1. Määritä luvun a arvo, kun piste (,3) on käyrällä a(3x + a) = (y - 1). Suora L kulkee pisteen (5,1) kautta ja on kohtisuorassa suoraa 6x + 7y - 19 = 0 vastaan.
Vanhoja koetehtäviä Analyyttinen geometria 016 1. Määritä luvun a arvo, kun piste (,3) on käyrällä a(3x + a) = (y - 1). Suora L kulkee pisteen (5,1) kautta ja on kohtisuorassa suoraa 6x + 7y - 19 = 0 vastaan.
Luento 9. Stereokartoituskojeet
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 9. Stereokartoituskojeet AIHEITA Analogiset stereokartoituskojeet Analyyttiset stereokartoituskojeet Digitaalinen
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 9. Stereokartoituskojeet AIHEITA Analogiset stereokartoituskojeet Analyyttiset stereokartoituskojeet Digitaalinen
Luento 4 Kolmiulotteiset kuvat. fotogrammetriaan ja kaukokartoitukseen
 Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Deformoituvan metallirakenteen fotogrammetrinen muodonmuutosmittaus
 Deformoituvan metallirakenteen fotogrammetrinen muodonmuutosmittaus Diplomityö, joka on jätetty opinnäytteenä tarkastettavaksi diplomi-insinöörin tutkintoa varten. Espoo, huhtikuu 2015 Tekniikan kandidaatti
Deformoituvan metallirakenteen fotogrammetrinen muodonmuutosmittaus Diplomityö, joka on jätetty opinnäytteenä tarkastettavaksi diplomi-insinöörin tutkintoa varten. Espoo, huhtikuu 2015 Tekniikan kandidaatti
Luento 10: Optinen 3-D mittaus ja laserkeilaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Luento 4: Kolmiointihavainnot
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Yhtälön oikealla puolella on säteen neliö, joten r. = 5 eli r = ± 5. Koska säde on positiivinen, niin r = 5.
 Tekijä Pitkä matematiikka 5 7..017 31 Kirjoitetaan yhtälö keskipistemuotoon ( x x ) + ( y y ) = r. 0 0 a) ( x 4) + ( y 1) = 49 Yhtälön vasemmalta puolelta nähdään, että x 0 = 4 ja y 0 = 1, joten ympyrän
Tekijä Pitkä matematiikka 5 7..017 31 Kirjoitetaan yhtälö keskipistemuotoon ( x x ) + ( y y ) = r. 0 0 a) ( x 4) + ( y 1) = 49 Yhtälön vasemmalta puolelta nähdään, että x 0 = 4 ja y 0 = 1, joten ympyrän
2 Pistejoukko koordinaatistossa
 Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
SINI- JA KOSINILAUSE. Laskentamenetelmät Geodeettinen laskenta - 1-1988-1999 M-Mies Oy
 SINI- JA KOSINILAUSE SINILAUSE: Kolmiossa kulman sinien suhde on sama kuin kulman vastaisten sivujen suhde. Toisin sanoen samassa kolmiossa SIN Kulma / Sivu = Vakio (Jos > 100 gon: Kulma = 200 kulma).
SINI- JA KOSINILAUSE SINILAUSE: Kolmiossa kulman sinien suhde on sama kuin kulman vastaisten sivujen suhde. Toisin sanoen samassa kolmiossa SIN Kulma / Sivu = Vakio (Jos > 100 gon: Kulma = 200 kulma).
Luento 4: Kolmiointihavainnot
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
MAB3 - Harjoitustehtävien ratkaisut:
 MAB - Harjoitustehtävien ratkaisut: Funktio. Piirretään koordinaatistoakselit ja sijoitetaan pisteet:. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä. Funktiolla
MAB - Harjoitustehtävien ratkaisut: Funktio. Piirretään koordinaatistoakselit ja sijoitetaan pisteet:. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä. Funktiolla
Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos
 Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Malinen/Ojalammi MS-A0203 Differentiaali- ja integraalilaskenta 2, kevät 2016 Laskuharjoitus 4A (Vastaukset) alkuviikolla
Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Malinen/Ojalammi MS-A0203 Differentiaali- ja integraalilaskenta 2, kevät 2016 Laskuharjoitus 4A (Vastaukset) alkuviikolla
origo III neljännes D
 Sijoita pisteet A(1,4) ja B(4,5;5) sekä C(-3,4) ja D(-4,--5) y II neljännes C A I neljännes B x origo III neljännes D IV neljännes KOTIT. Sijoita ja nimeä koordinaatistoon pisteitä niin, että pisteet yhdistettäessä
Sijoita pisteet A(1,4) ja B(4,5;5) sekä C(-3,4) ja D(-4,--5) y II neljännes C A I neljännes B x origo III neljännes D IV neljännes KOTIT. Sijoita ja nimeä koordinaatistoon pisteitä niin, että pisteet yhdistettäessä
Tampereen yliopisto Tietokonegrafiikka 2013 Tietojenkäsittelytiede Harjoitus
 Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
MATEMATIIKKA 5 VIIKKOTUNTIA. PÄIVÄMÄÄRÄ: 8. kesäkuuta 2009
 EB-TUTKINTO 2009 MATEMATIIKKA 5 VIIKKOTUNTIA PÄIVÄMÄÄRÄ: 8. kesäkuuta 2009 KOKEEN KESTO: 4 tuntia (240 minuuttia) SALLITUT APUVÄLINEET: Eurooppa-koulun antama taulukkovihkonen Funktiolaskin, joka ei saa
EB-TUTKINTO 2009 MATEMATIIKKA 5 VIIKKOTUNTIA PÄIVÄMÄÄRÄ: 8. kesäkuuta 2009 KOKEEN KESTO: 4 tuntia (240 minuuttia) SALLITUT APUVÄLINEET: Eurooppa-koulun antama taulukkovihkonen Funktiolaskin, joka ei saa
Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos
 Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Malinen/Vesanen MS-A0205/6 Differentiaali- ja integraalilaskenta 2, kevät 2017 Laskuharjoitus 4A (Vastaukset) alkuviikolla
Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Malinen/Vesanen MS-A0205/6 Differentiaali- ja integraalilaskenta 2, kevät 2017 Laskuharjoitus 4A (Vastaukset) alkuviikolla
Osoita, että kaikki paraabelit ovat yhdenmuotoisia etsimällä skaalauskuvaus, joka vie paraabelin y = ax 2 paraabelille y = bx 2. VASTAUS: , b = 2 2
 8. Geometriset kuvaukset 8.1. Euklidiset kuvaukset 344. Esitä muodossa x = Ax + b se avaruuden E 3 peilauskuvaus, jonka symmetriatasona on x 1 3x + x 3 = 6. A = 1 3 6 6 3, b = 1 1 18. 3 6 6 345. Tason
8. Geometriset kuvaukset 8.1. Euklidiset kuvaukset 344. Esitä muodossa x = Ax + b se avaruuden E 3 peilauskuvaus, jonka symmetriatasona on x 1 3x + x 3 = 6. A = 1 3 6 6 3, b = 1 1 18. 3 6 6 345. Tason
y=-3x+2 y=2x-3 y=3x+2 x = = 6
 MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
Lineaarialgebra MATH.1040 / Piirianalyysiä
 Lineaarialgebra MATH.1040 / Piirianalyysiä 1 Kirchoffin ensimmäinen laki: Missä tahansa virtapiirin liitoskohdassa pisteeseen saapuvien sähkövirtojen summa on yhtä suuri kuin siitä poistuvien sähkövirtojen
Lineaarialgebra MATH.1040 / Piirianalyysiä 1 Kirchoffin ensimmäinen laki: Missä tahansa virtapiirin liitoskohdassa pisteeseen saapuvien sähkövirtojen summa on yhtä suuri kuin siitä poistuvien sähkövirtojen
Suorat ja tasot, L6. Suuntajana. Suora xy-tasossa. Suora xyzkoordinaatistossa. Taso xyzkoordinaatistossa. Tason koordinaattimuotoinen yhtälö.
 Suorat ja tasot, L6 Suora xyz-koordinaatistossa Taso xyz-koordinaatistossa stä stä 1 Näillä kalvoilla käsittelemme kolmen laisia olioita. Suora xyz-avaruudessa. Taso xyz-avaruudessa. Emme nyt ryhdy pohtimaan,
Suorat ja tasot, L6 Suora xyz-koordinaatistossa Taso xyz-koordinaatistossa stä stä 1 Näillä kalvoilla käsittelemme kolmen laisia olioita. Suora xyz-avaruudessa. Taso xyz-avaruudessa. Emme nyt ryhdy pohtimaan,
Luento 7: 3D katselu. Sisältö
 Tietokonegrafiikka / perusteet Tik-.3/3 4 ov / 2 ov Luento 7: 3D katselu Lauri Savioja /4 3D katselu / Sisältö Koorinaattimuunnokset Kameran ja maailmankoorinaatiston yhteys Perspektiivi 3D katselu / 2
Tietokonegrafiikka / perusteet Tik-.3/3 4 ov / 2 ov Luento 7: 3D katselu Lauri Savioja /4 3D katselu / Sisältö Koorinaattimuunnokset Kameran ja maailmankoorinaatiston yhteys Perspektiivi 3D katselu / 2
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 2017 Insinöörivalinnan matematiikan koe , Ratkaisut (Sarja A)
") Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 017 Insinöörivalinnan matematiikan koe 30..017, Ratkaisut (Sarja A) 1. a) Lukujen 9, 0, 3 ja x keskiarvo on. Määritä x. (1 p.) b) Mitkä reaaliluvut
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 017 Insinöörivalinnan matematiikan koe 30..017, Ratkaisut (Sarja A) 1. a) Lukujen 9, 0, 3 ja x keskiarvo on. Määritä x. (1 p.) b) Mitkä reaaliluvut
w + x + y + z =4, wx + wy + wz + xy + xz + yz =2, wxy + wxz + wyz + xyz = 4, wxyz = 1.
 Kotitehtävät, tammikuu 2011 Vaikeampi sarja 1. Ratkaise yhtälöryhmä w + x + y + z =4, wx + wy + wz + xy + xz + yz =2, wxy + wxz + wyz + xyz = 4, wxyz = 1. Ratkaisu. Yhtälöryhmän ratkaisut (w, x, y, z)
Kotitehtävät, tammikuu 2011 Vaikeampi sarja 1. Ratkaise yhtälöryhmä w + x + y + z =4, wx + wy + wz + xy + xz + yz =2, wxy + wxz + wyz + xyz = 4, wxyz = 1. Ratkaisu. Yhtälöryhmän ratkaisut (w, x, y, z)
Tilavuusintegroin. f(x,y,z)dxdydz. = f(x,y,z)dx dy
dxdydz. = f(x,y,z)dx dy") z 2 y 2 x 2 z y x Tilavuusintegroin. f(x,y,z)dxdydz z 2 y 2 x 2 = f(x,y,z)dx dy dz z y x Tyypillises. kemian sovelluksissa f(x,y,z) on massa.heys, jolloin integraalin arvo on massa alueella jota integroin.rajat
z 2 y 2 x 2 z y x Tilavuusintegroin. f(x,y,z)dxdydz z 2 y 2 x 2 = f(x,y,z)dx dy dz z y x Tyypillises. kemian sovelluksissa f(x,y,z) on massa.heys, jolloin integraalin arvo on massa alueella jota integroin.rajat
Käy vastaamassa kyselyyn kurssin pedanet-sivulla (TÄRKEÄ ensi vuotta ajatellen) Kurssin suorittaminen ja arviointi: vähintään 50 tehtävää tehtynä
 Kurssin suorittaminen ja arviointi: vähintään 50 tehtävää tehtynä") Käy vastaamassa kyselyyn kurssin pedanet-sivulla (TÄRKEÄ ensi vuotta ajatellen) Kurssin suorittaminen ja arviointi: vähintään 50 tehtävää tehtynä (vihkon palautus kokeeseen tullessa) Koe Mahdolliset testit
Käy vastaamassa kyselyyn kurssin pedanet-sivulla (TÄRKEÄ ensi vuotta ajatellen) Kurssin suorittaminen ja arviointi: vähintään 50 tehtävää tehtynä (vihkon palautus kokeeseen tullessa) Koe Mahdolliset testit
Kuva 1: Funktion f tasa-arvokäyriä. Ratkaisu. Suurin kasvunopeus on gradientin suuntaan. 6x 0,2
 HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi I, syksy 018 Harjoitus Ratkaisuehdotukset Tehtävä 1. Olkoon f : R R f(x 1, x ) = x 1 + x Olkoon C R. Määritä tasa-arvojoukko Sf(C) = {(x 1, x
HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi I, syksy 018 Harjoitus Ratkaisuehdotukset Tehtävä 1. Olkoon f : R R f(x 1, x ) = x 1 + x Olkoon C R. Määritä tasa-arvojoukko Sf(C) = {(x 1, x
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
Laudatur 4 MAA4 ratkaisut kertausharjoituksiin
 Laudatur MAA ratkaisut kertausharjoituksiin Yhtälöparit ja yhtälöryhmät 6. a) x y = 7 eli,y+, sijoitetaan alempaan yhtälöön x+ 7y = (, y+, ) + 7y =,y =, y = Sijoitetaan y = yhtälöparin ylempään yhtälöön.,
Laudatur MAA ratkaisut kertausharjoituksiin Yhtälöparit ja yhtälöryhmät 6. a) x y = 7 eli,y+, sijoitetaan alempaan yhtälöön x+ 7y = (, y+, ) + 7y =,y =, y = Sijoitetaan y = yhtälöparin ylempään yhtälöön.,
MS-A0003/A0005 Matriisilaskenta Laskuharjoitus 2 / vko 45
 MS-A0003/A0005 Matriisilaskenta Laskuharjoitus / vko 5 Tehtävä 1 (L): Hahmottele kompleksitasoon ne pisteet, jotka toteuttavat a) z 3 =, b) z + 3 i < 3, c) 1/z >. Yleisesti: ehto z = R, z C muodostaa kompleksitasoon
MS-A0003/A0005 Matriisilaskenta Laskuharjoitus / vko 5 Tehtävä 1 (L): Hahmottele kompleksitasoon ne pisteet, jotka toteuttavat a) z 3 =, b) z + 3 i < 3, c) 1/z >. Yleisesti: ehto z = R, z C muodostaa kompleksitasoon
3 TOISEN ASTEEN POLYNOMIFUNKTIO
 3 TOISEN ASTEEN POLYNOMIFUNKTIO POHDITTAVAA 1. Kuvasta voidaan arvioida, että frisbeegolfkiekko käy noin 9 metrin korkeudella ja se lentää noin 40 metrin päähän. Vastaus: Frisbeegolfkiekko käy n. 9 m:n
3 TOISEN ASTEEN POLYNOMIFUNKTIO POHDITTAVAA 1. Kuvasta voidaan arvioida, että frisbeegolfkiekko käy noin 9 metrin korkeudella ja se lentää noin 40 metrin päähän. Vastaus: Frisbeegolfkiekko käy n. 9 m:n
Tekijä Pitkä matematiikka Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4).
, ( 2,1), (1, 0), (4, 1) ja ( 11, 4).") Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
MAA7 7.1 Koe Jussi Tyni Valitse kuusi tehtävää! Tee vastauspaperiin pisteytysruudukko! Kaikkiin tehtäviin välivaiheet näkyviin!
 MAA7 7.1 Koe Jussi Tyni 9.1.01 1. Laske raja-arvot: a) 5 lim 5 10 b) lim 9 71. a) Määritä erotusosamäärän avulla funktion f (). f ( ) derivaatta 1 b) Millä välillä funktio f ( ) 9 on kasvava? Perustele
MAA7 7.1 Koe Jussi Tyni 9.1.01 1. Laske raja-arvot: a) 5 lim 5 10 b) lim 9 71. a) Määritä erotusosamäärän avulla funktion f (). f ( ) derivaatta 1 b) Millä välillä funktio f ( ) 9 on kasvava? Perustele
MATEMATIIKAN KOE, PITKÄ OPPIMÄÄRÄ (1 piste/kohta)
") MATEMATIIKAN KOE, PITKÄ OPPIMÄÄRÄ 3.3.06. ( piste/kohta) Sivu / 8 Kohta Vaihtoehdon numero A B C D E F 3. a) Ainakin yhdet sulut kerrottu oikein auki 6x 4x x( 3x) Ratkaistu nollakohdat sieventämisen lisäksi
MATEMATIIKAN KOE, PITKÄ OPPIMÄÄRÄ 3.3.06. ( piste/kohta) Sivu / 8 Kohta Vaihtoehdon numero A B C D E F 3. a) Ainakin yhdet sulut kerrottu oikein auki 6x 4x x( 3x) Ratkaistu nollakohdat sieventämisen lisäksi
Stereopaikannusjärjestelmän tarkkuus (3 op)
") Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
JUHTA - Julkisen hallinnon tietohallinnon neuvottelukunta
 JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 6: EUREF-FIN:n ja KKJ:n välinen kolmiulotteinen yhdenmuotoisuusmuunnos ja sen tarkkuus Versio: 1.0 / 3.2.2016
JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 6: EUREF-FIN:n ja KKJ:n välinen kolmiulotteinen yhdenmuotoisuusmuunnos ja sen tarkkuus Versio: 1.0 / 3.2.2016
Pyramidi 4 Analyyttinen geometria tehtävien ratkaisut sivu 352 Päivitetty Pyramidi 4 Luku Ensimmäinen julkaistu versio
 Pramidi 4 Analttinen geometria tehtävien ratkaisut sivu 5 Päivitett 9..7 Pramidi 4 Luku 8..6 Ensimmäinen julkaistu versio 7.5.6 Korjattu tehtävän 865 ratkaisua. 8..7 Korjattu tehtävässä 85 luku 5 luvuksi
Pramidi 4 Analttinen geometria tehtävien ratkaisut sivu 5 Päivitett 9..7 Pramidi 4 Luku 8..6 Ensimmäinen julkaistu versio 7.5.6 Korjattu tehtävän 865 ratkaisua. 8..7 Korjattu tehtävässä 85 luku 5 luvuksi
Avaruuden kolme sellaista pistettä, jotka eivät sijaitse samalla suoralla, määräävät
 11 Taso Avaruuden kolme sellaista pistettä, jotka eivät sijaitse samalla suoralla, määräävät tason. Olkoot nämä pisteet P, B ja C. Merkitään vaikkapa P B r ja PC s. Tällöin voidaan sanoa, että vektorit
11 Taso Avaruuden kolme sellaista pistettä, jotka eivät sijaitse samalla suoralla, määräävät tason. Olkoot nämä pisteet P, B ja C. Merkitään vaikkapa P B r ja PC s. Tällöin voidaan sanoa, että vektorit
Mb8 Koe Kuopion Lyseon lukio (KK) sivu 1/2
 sivu 1/2") Mb8 Koe 0.11.015 Kuopion Lyseon lukio (KK) sivu 1/ Kokeessa on kaksi osaa. Osa A ratkaistaan tehtäväpaperille ja osa B ratkaistaan konseptipaperille. Osa A: saat käyttää taulukkokirjaa mutta et laskinta.
Mb8 Koe 0.11.015 Kuopion Lyseon lukio (KK) sivu 1/ Kokeessa on kaksi osaa. Osa A ratkaistaan tehtäväpaperille ja osa B ratkaistaan konseptipaperille. Osa A: saat käyttää taulukkokirjaa mutta et laskinta.
Luento 5: Kolmioinnin laskenta
 Maa-57.0 Fotogrammetrinen kartoitus Luento-ohjelma 1 3 4 5 6 7 8 9 10 11 1 13 Luento 5: Kolmioinnin laskenta Luento 5: Kolmioinnin laskenta Ilmakolmiointi Blokkitasoitus painotetulla PNS-menetelmällä Kolmioinnin
Maa-57.0 Fotogrammetrinen kartoitus Luento-ohjelma 1 3 4 5 6 7 8 9 10 11 1 13 Luento 5: Kolmioinnin laskenta Luento 5: Kolmioinnin laskenta Ilmakolmiointi Blokkitasoitus painotetulla PNS-menetelmällä Kolmioinnin
DYNAMIIKKA II, LUENTO 6 (SYKSY 2015) Arttu Polojärvi
 Arttu Polojärvi") DYNAMIIKKA II, LUENTO 6 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Mekaniikan peruslait (liikelait). Liikemäärän momentin tase. Kappaleen massan vaikutusmitat. Jäykän
DYNAMIIKKA II, LUENTO 6 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Mekaniikan peruslait (liikelait). Liikemäärän momentin tase. Kappaleen massan vaikutusmitat. Jäykän
TTY Mittausten koekenttä. Käyttö. Sijainti
 TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
Tekijä Pitkä matematiikka b) Kuvasta nähdään, että b = i 4 j. c) Käytetään a- ja b-kohtien tuloksia ja muokataan lauseketta.
 Kuvasta nähdään, että b = i 4 j. c) Käytetään a- ja b-kohtien tuloksia ja muokataan lauseketta.") Tekijä Pitkä matematiikka 4 9.1.016 79 a) Kuvasta nähdään, että a = 3i + j. b) Kuvasta nähdään, että b = i 4 j. c) Käytetään a- ja b-kohtien tuloksia ja muokataan lauseketta. 5a b = 5(3i + j) ( i 4 j)
Tekijä Pitkä matematiikka 4 9.1.016 79 a) Kuvasta nähdään, että a = 3i + j. b) Kuvasta nähdään, että b = i 4 j. c) Käytetään a- ja b-kohtien tuloksia ja muokataan lauseketta. 5a b = 5(3i + j) ( i 4 j)
Luento 8: Ilmakuvaus AIHEITA. Kuvauslajit. Maa-57.300 Fotogrammetrian perusteet. Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 9.2.2003, Päivityksiä: Katri Koistinen 10.2.2004) Luento 8: Ilmakuvaus AIHEITA Kuvauslajit
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 9.2.2003, Päivityksiä: Katri Koistinen 10.2.2004) Luento 8: Ilmakuvaus AIHEITA Kuvauslajit
11 MATEMAATTINEN ANALYYSI
 Huippu Kertaus Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 0.7.08 MATEMAATTINEN ANALYYSI ALOITA PERUSTEISTA 444A. a) Funktion arvot ovat positiivisia silloin, kun kuvaaja on x-akselin yläpuolella.
Huippu Kertaus Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 0.7.08 MATEMAATTINEN ANALYYSI ALOITA PERUSTEISTA 444A. a) Funktion arvot ovat positiivisia silloin, kun kuvaaja on x-akselin yläpuolella.
Matemaattisen analyysin tukikurssi
 Matemaattisen analyysin tukikurssi 12. Kurssikerta Petrus Mikkola 5.12.2016 Tämän kerran asiat Sini-ja kosifunktio Yksikköympyrä Tangentti- ja kotangenttifunktio Trigonometristen funktioiden ominaisuuksia
Matemaattisen analyysin tukikurssi 12. Kurssikerta Petrus Mikkola 5.12.2016 Tämän kerran asiat Sini-ja kosifunktio Yksikköympyrä Tangentti- ja kotangenttifunktio Trigonometristen funktioiden ominaisuuksia
Tilavuusintegroin3. Tilavuusintegroin3 3/19/13. f(x, y, z)dxdydz. ρ(x,y,z) = x 2 + y 2 + z 2 (kg) Ratkaisu: ρ(x,y,z)dxdydz
dxdydz. ρ(x,y,z) = x 2 + y 2 + z 2 (kg) Ratkaisu: ρ(x,y,z)dxdydz") /9/ z 2 y 2 x 2 z y x Tilavuusintegoin f(x, y, z)dxdydz z 2 # y 2 # x 2 & & = % % f(x, y, z)dx( dy( dz $ $ ' ' z y x Tyypillises kemian sovelluksissa f(x,y,z) on massaheys, jolloin integaalin avo on massa
/9/ z 2 y 2 x 2 z y x Tilavuusintegoin f(x, y, z)dxdydz z 2 # y 2 # x 2 & & = % % f(x, y, z)dx( dy( dz $ $ ' ' z y x Tyypillises kemian sovelluksissa f(x,y,z) on massaheys, jolloin integaalin avo on massa
Puun geometrisen laatutiedon mittaukset monikameramenetelmällä
 Metsätehon raportti 183 11.3.2005 Rajoitettu jakelu Järvi-Suomen Uittoyhdistys Kuhmo Oy Metsähallitus Metsäliitto Osuuskunta Metsäteollisuus ry Pölkky Oy Stora Enso Oyj UPM-Kymmene Oyj Vapo Timber Oy Visuvesi
Metsätehon raportti 183 11.3.2005 Rajoitettu jakelu Järvi-Suomen Uittoyhdistys Kuhmo Oy Metsähallitus Metsäliitto Osuuskunta Metsäteollisuus ry Pölkky Oy Stora Enso Oyj UPM-Kymmene Oyj Vapo Timber Oy Visuvesi
LIITE 1 VIRHEEN ARVIOINNISTA
 Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Tilavuusintegroin3. Tilavuusintegroin3
 /5/ z 2 y 2 x 2 z y x Tilavuusintegoin f(x,y,z)dxdydz z 2 # y 2 # x 2 & & = % % f(x,y,z)dx( dy( dz $ $ ' ' z y x Tyypillises kemian sovelluksissa f(x,y,z) on massaheys, jolloin integaalin avo on massa
/5/ z 2 y 2 x 2 z y x Tilavuusintegoin f(x,y,z)dxdydz z 2 # y 2 # x 2 & & = % % f(x,y,z)dx( dy( dz $ $ ' ' z y x Tyypillises kemian sovelluksissa f(x,y,z) on massaheys, jolloin integaalin avo on massa
Ympyrän yhtälö
 Ympyrän yhtälö ANALYYTTINEN GEOMETRIA MAA4 On melko selvää, että origokeskisen ja r-säteisen ympyrän yhtälö voidaan esittää muodossa x 2 + y 2 = r 2. Vastaavalla tavalla muodostetaan ympyrän yhtälö, jonka
Ympyrän yhtälö ANALYYTTINEN GEOMETRIA MAA4 On melko selvää, että origokeskisen ja r-säteisen ympyrän yhtälö voidaan esittää muodossa x 2 + y 2 = r 2. Vastaavalla tavalla muodostetaan ympyrän yhtälö, jonka
Radiotekniikan sovelluksia
 Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
TURKU. http://fi.wikipedia.org/wiki/turku
 Turun kaupungin maastomittauspalvelut ja koordinaaattijärjestelmän vaihto käytännössä Tampereen seutukunnan maanmittauspäivät Ikaalisten kylpylässä 17.-18.3.2010, Harri Kottonen Kuka Harri Kottonen, Mittaustyöpäällikkö
Turun kaupungin maastomittauspalvelut ja koordinaaattijärjestelmän vaihto käytännössä Tampereen seutukunnan maanmittauspäivät Ikaalisten kylpylässä 17.-18.3.2010, Harri Kottonen Kuka Harri Kottonen, Mittaustyöpäällikkö
Luento 1 Fotogrammetria prosessina Maa Fotogrammetrian perusteet 1
 Luento 1 Fotogrammetria prosessina. 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Maa-57.1030 Fotogrammetrian perusteet (3 op) Sisältyy geomatiikan koulutusohjelman perusmoduuliin A1. Kurssin kuvaus Stereofotogrammetria.
Luento 1 Fotogrammetria prosessina. 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Maa-57.1030 Fotogrammetrian perusteet (3 op) Sisältyy geomatiikan koulutusohjelman perusmoduuliin A1. Kurssin kuvaus Stereofotogrammetria.
massa vesi sokeri muu aine tuore luumu b 0,73 b 0,08 b = 0,28 a y kuivattu luumu a x 0,28 a y 0,08 = 0,28 0,08 = 3,5
 A1. Tehdään taulukko luumun massoista ja pitoisuuksista ennen ja jälkeen kuivatuksen. Muistetaan, että kuivatuksessa haihtuu vain vettä. Näin ollen sokerin ja muun aineen massa on sama molemmilla riveillä.
A1. Tehdään taulukko luumun massoista ja pitoisuuksista ennen ja jälkeen kuivatuksen. Muistetaan, että kuivatuksessa haihtuu vain vettä. Näin ollen sokerin ja muun aineen massa on sama molemmilla riveillä.
PAINOVOIMAMITTAUKSET JA KALLIONPINNAN SYVYYSTULKINNAT
 1 (24) PAINOVOIMAMITTAUKSET JA KALLIONPINNAN SYVYYSTULKINNAT Tuire Valjus Menetelmän perusteista Painovoimamittausten avulla voidaan tutkia tiheydeltään ympäristöstä poikkeavien muodostumien paksuutta
1 (24) PAINOVOIMAMITTAUKSET JA KALLIONPINNAN SYVYYSTULKINNAT Tuire Valjus Menetelmän perusteista Painovoimamittausten avulla voidaan tutkia tiheydeltään ympäristöstä poikkeavien muodostumien paksuutta
Garmin GPSmap 60CSx -laite
 Garmin GPSmap 60CSx -laite GPS koulutus 20.6.2007 PAIKKATIETOPAJA -hanke Näppäimet ja laitteen osat Power - virta päälle/pois, taustavalon säätö Keinunäppäin valitse vaihtoehtoja / kenttiä, syötä tietoja,
Garmin GPSmap 60CSx -laite GPS koulutus 20.6.2007 PAIKKATIETOPAJA -hanke Näppäimet ja laitteen osat Power - virta päälle/pois, taustavalon säätö Keinunäppäin valitse vaihtoehtoja / kenttiä, syötä tietoja,
Laskuharjoitus 7 Ratkaisut
 Vastaukset palautetaan yhtenä PDF-tiedostona MyCourses:iin 25.4. klo 14 mennessä. Mahdolliset asia- ja laskuvirheet ja voi ilmoittaa osoitteeseen serge.skorin@aalto.fi. Laskuharjoitus 7 Ratkaisut 1. Kuvan
Vastaukset palautetaan yhtenä PDF-tiedostona MyCourses:iin 25.4. klo 14 mennessä. Mahdolliset asia- ja laskuvirheet ja voi ilmoittaa osoitteeseen serge.skorin@aalto.fi. Laskuharjoitus 7 Ratkaisut 1. Kuvan