Luento 4 Kolmiulotteiset kuvat. fotogrammetriaan ja kaukokartoitukseen
|
|
|
- Kimmo Karvonen
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
1 Luento 4 Kolmiulotteiset kuvat 1
2 Kuvan kolmiulotteisuus 2
3 Stereokuva 3
4 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin. Stereokuvien tarkasteluvälineitä. Tarkastelu ilman apuvälineitä. Stereokuvaparin piirtäminen. Satunnaispistestereogrammi. Sydänsäteet. Anaglyfikuvan tuottaminen. 4
 5")
5 Camera obscura ( Dorling Kindersley Ltd., 1976) 5
6 Neulanreikäkamera 6
7 Kameravakio c c 7
8 Polttoväli f f 8
9 Parallaksi 9
10 Stereoskooppinen näkeminen Parallaktinen kulma I Kuva: Albertz,
11 Stereoskooppinen näkeminen II Stereoskooppinen näkeminen perustuu binokulaariseen eli silmien yhteisnäköön, jolla tarkoitetaan ihmisen kykyä aistia näkemänsä yhtenä aistimuksena. Vaikka stereoskooppisessa näkemisessä kumpikin silmä näkee perspektiiviltään erilaisen kuvan, ne sulautuvat yhteen yhdeksi kolmiulotteiseksi stereokuvaksi. 11
12 Binokulaarinen konvergenssi Pisteet, jotka ovat toisen silmän suhteen samalla suoralla ja näkyvät sille yhtenä pisteenä, näkyvät toiselle silmälle eri kulmissa. Silmien näköakselit muodostavat kulman, jonka terävyys vaihtelee esineen etäisyydestä riippuen. Tätä etäisyyshavaintoon vaikuttavaa kulman terävyyttä kutsutaan binokulaariseksi konvergenssiksi. 12
13 Parallax disparity Parallaksikulma pienenee, kun katseluetäisyys kasvaa. Samalla kohdepisteiden kuvat siirtyvät verkkokalvolla vaakasuunnassa lähemmäs toisiaan. Kun katselupiste lähenee, pisteiden kuvat siirtyvät etäämmäksi toisistaan. Liikettä kutsutaan termeillä parallax disparity, retinal disparity. 13
14 Katselupiste Katseen kohdistuessa silmät fokusoituvat tahdottomasti näköakselien leikkauspisteeseen, katselupisteeseen. Näköakselien välistä leikkausta kutsutaan binokulaariseksi konvergenssiksi (horizontal binocular convergence) ja kulmaa ø parallaksikulmaksi (parallactic angle). Katselupisteen ympärillä oleva avaruus hahmottuu kolmiulotteisena parallaksikulman muutosten vaikutuksesta. 14
15 Stereokuvaus ja -vaikutelma 15
16 Vaakaparallaksi Eri kulmat aiheuttavat kuvapisteen siirtymistä silmän verkkokalvolla. Vastinkuvapisteiden siirtyminen tapahtuu horisontaali- eli vaakatasossa, koska silmät toimivat yhteistyössä. Fotogrammetriassa tätä kuvapisteiden siirtymistä kuvataan termillä vaakaparallaksi (horisontaalinen parallaksi). 16
17 Kantasuhde Vaakaparallaksin muutoksen suuruus verrattuna etäisyyden muutoksen suuruuteen on käänteisesti verrannollinen etäisyyden neliöön ja suoraan verrannollinen sydänakselin eli silmien välisen janan pituuteen. Kantasuhde silmäli / katselupisteen etäisyys 17
18 Etäisyyshavainnon epätarkkuus Mittakaava: Kantasuhde: Parallaksi: 18
19 Näköterävyys Pienin havaittavissa oleva etäisyysero on 25 cm:n etäisyydellä 0.07 mm. tämä vastaa kulmana 0,001-0,002 astetta Vastaavasti voidaan laskea, että etäisyyserojen havitseminen loppuu, kun etäisyys on metriä. 19
20 Monokulaarinen syvyysnäkö Etäisyyksien havaitseminen on mahdollista myös monokulaarisesti. Merkittävin syvyysvihje saadaan tällöin ns. liikeparallaksista. Parallaksi syntyy joko pään liikkeestä kohteen suhteen tai päinvastoin. Etäisyyden havaitseminen voi perustua myös kokemukseen valoista, varjoista, liikkeen nopeudesta, kohteen koosta, jne. 20

21 Stereokuva 21
22 Stereokuva Stereokuvaksi kutsutaan kolmiulotteisesti tarkasteltavissa olevaa kuvaa kolmiulotteisesta kohteesta. Stereokuvapari muodostuu kahdesta osakuvasta, jotka kumpikin 'näkevät' tarkasteltavan kohteen hieman toisistaan poikkeavista perspektiiveistä. 22
23 Stereoilluusio Kun stereokuvapari havaitaan - vasen kuva vasemmalla silmällä ja oikea kuva oikealla - kuvat sulautuvat mielessämme yhdeksi ja näemme kohteen stereokuvana. Käsite: stereoilluusio 23
24 Stereonäkemisen ehdot Stereokuvan näkeminen edellyttää sekä kuvaus- että tarkastelutekniikan hallitsemista eli sitä, että kuvat on otettu oikein ja ne muodostavat stereoparin, ja kuvat sovitetaan keskenään oikeaan asemaan tarkasteluhetkellä. 24
25 Täyden näön kuva Tarkasteltaessa kuvia oikein kummankin kuvan vastinpiirteet kohdistuvat tarkasti toisiinsa ja yhtyvät stereokuvaksi. Stereokuvien tarkastelu on ollut suosittu tapa jo valokuvauksen alkuajoista saakka, koska se antaa kohteesta huomattavan täydellisen kuvan yksittäiseen kuvaan verrattuna. 25
26 Stereokuvauksen normaalitapaus Stereokuvaus on kuvan ottamista kahdesta eri perspektiivistä. Kuvien väliä kutsutaan kannaksi. Kuvauksen aikana tulee ottaa huomioon kaksi stereotarkastelun kannalta oleellista ehtoa. 1.Kummankin kuvan kuvaussuuntien tulee olla likimain yhdensuuntaiset. 2.Kumpikin kuva tulee ottaa yhtä etäältä tarkasteltavasta kohteesta eli kuvaussuunnan tulee olla kohtisuorassa kantaa vastaan. 26
27 Stereokuvauksen normaalitapaus Yhdensuuntaiset kuvausakselit Sama etäisyys kohteeseen Oikein Väärin Oikein? Ok! 27
28 Stereokuvaus 28
29 Stereokuvauksen normaalitapaus Piirroksessa kuvat on esitetty positiiviasennossa eli asennossa, jossa kuvia yleensä katsotaan. Kamerassa kuva on negatiiviasennossa eli ylösalaisin. 29
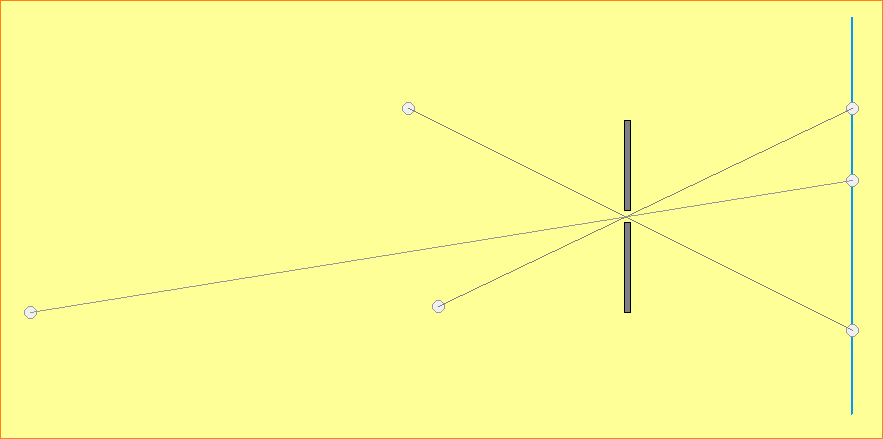
30 Vastinpisteet Tarkastellaan mielivaltaista kohteen pistettä P ja sen kuvia P' ja P''. Pisteitä P' ja P'' kutsutaan vastinpisteiksi (homologiset pisteet). Oletetaan, että kumpikin kuva otetaan samalta tasolta ja kuvakanta on tämän tason suuntainen. Tällöin kuvan pisteiden P' ja P'' kautta kulkeva suora on myös kuvakannan suuntainen. 30
31 Sydäntaso ja sydänsuora Suoraa P'P'' kutsutaan sydänsuoraksi ja tasoa O'O''P ja sydäntasoksi Normaalitapauksessa kaikki sydänsuorat ovat yhdensuuntaisia. Synonyymeinä käytetään myös termejä epipolaaritaso ja epipolaarisuora 31
32 Stereokamera 32

33 Stereokamera SMK 40 33
34 Kuvakanta? Kannan suuruus riippuu kuvausetäisyydestä ja stereokuvien käyttötarkoituksesta. Pelkkään stereotarkasteluun tarkoitetuilla kuvilla kanta voi vaihdella lähes olemattomasta, siis muutamasta sentistä, ehkä enimmillään yhteen metriin. Mittaus- ja kartoituskuvauksissa kuvakanta on pidempi, koska syvyysmittauksen tarkkuutta halutaan korostaa. Ilmakuvilla kanta voi olla jopa puolet kuvausetäisyydestä. 34
35 Maiseman stereokuvaus Maisemakuvauksessa on tärkeää, että kuvaparia otettaessa siirrytään vaakasuoraan, jolloin kanta on horisontin suuntainen ja myös stereokuva nähdään vaakasuorassa. 35
36 Stereokuvaus Stereokuvien ottaminen pelkästään stereotarkastelua varten ei edellytä pitkää kantaa. 36
37 Stereokuvien piirtäminen 37
38 Vapaa stereokatselu Ilmakuvat: FM-Kartta,
39 Crossed eyes Ilmakuvat: FM-Kartta,
40 Parallel eyes Ilmakuvat: FM-Kartta,

41 Satunnaispistestereogrammi Magic 3D 41
 (Kuva: Chicago Historical Society)")
42 Stereokuvien tarkastelu (Kuvat: The Touring Institute) (Kuva: Chicago Historical Society) 42

43 Stereoprisma (Kuvat: Tiedekeskus Heureka, 1996) 43

44 Taskustereoskooppeja (Kuvat ylärivissä: Instrument Cataloque ja Ben Meadows Co.) (Alarivin kuvat: Albertz, 2001) 44

45 Peilistereoskooppeja (Kuvat ylärivissä: Ben Meadows Co.) (Alarivin kuvat: Albertz, 2001) 45
46 Stereokuvien kaksoisprojektio Kaksoisprojektiossa kuvat projisioidaan tarkastelutasolla toistensa päälle. Kuvien erottelu toteutetaan stereolaseilla, jotka suodattavat kuvat ristiin. Vasemmalla silmällä havaitaan ainoastaan vasen ja oikealla silmällä ainoastaan oikea kuva. Ilman stereolaseja kuva näkyy kahtena, koska vaakaparallaksit näkyvät vastinpisteiden välisinä vaakasuuntaisina eroina. Stereolasien läpi katsottaessa parallaksierot muuttuvat korkeuseroiksi ja kuva näkyy kolmiulotteisena. 46
47 Kuvien erottelu Kaksoisprojektiossa kuvien erottelu voi perustua vastavärien käyttöön (anaglyfikuvat), valon polarisointiin, tai kuvien vuorotteluun. 47
48 Anaglyfi-kuvapari Anaglyfi-kuvaparin kuvat projisioidaan vastavärein, oikea kuva punaisella ja vasen kuva sini-vihreällä eli syaanilla valolla. Kun kuvia tarkastellaan anaglyfilasein, aiemmin puna-viherlasein, punaista kuvaa syaanin ja sinivihreä kuvaa punaisen suotimen lävitse, kumpikin silmä näkee vain oman kuvansa. Kuvat mielletään yhdessä nähtynä kohteen kolmiulotteisena mallina, värillisenä stereokuvana. 48

49 Värien erottelu LEFT RIGHT LEFT RIGHT LEFT RIGHT 49
50 Värien valinta LEFT LEFT RIGHT RIGHT RIGHT RIGHT LEFT RIGHT 50
51 Anaglyfikuva LEFT RIGHT RIGHT 51

52 MV värien erottelu LEFT RIGHT LEFT RIGHT LEFT RIGHT 52
53 MV Anaglyfikuva LEFT RIGHT RIGHT 53
54 Polarisoidut kuvaparit Polarisoidut kuvaparit esitetään kahdella projektorilla. Toisen projektorin valo polarisoidaan pystysuuntaan, toisen vaakasuuntaan. Stereomallia tarkastellaan vastaavasti polarisoiduilla silmälaseilla. 54
55 Kuvien vuorotteluun perustuva erottelu Kolmantena vaihtoehtona on käytetty oikean ja vasemman kuvan vuorottaista, suurella taajuudella vuoroa vaihtavaa projisiointia. Kuvaparia tarkastellaa aktiivisin silmälasein, jonka okulaarien sulkimet tahdistetaan valaistuksen mukaan. Projektiotaajuus on luokkaa 120 Hz. 55

56 Stereofotogrammetrinen työasema Helava DSW 56
Luento 4 Kolmiulotteiset kuvat. fotogrammetriaan ja kaukokartoitukseen
 Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Luento 2: Stereoskopia
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 2: Stereoskopia AIHEITA (Alkuperäinen luento: Henrik Haggrén, 3.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004)
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 2: Stereoskopia AIHEITA (Alkuperäinen luento: Henrik Haggrén, 3.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004)
Luento 2 Stereokuvan laskeminen. 2008 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 7 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 9 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 5. Stereomittauksen tarkkuus Maa Fotogrammetrian perusteet 1
 Luento 5 Stereomittauksen tarkkuus 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin
Luento 5 Stereomittauksen tarkkuus 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin
Luento 5: Stereoskooppinen mittaaminen
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
1. STEREOKUVAPARIN OTTAMINEN ANAGLYFIKUVIA VARTEN. Hyvien stereokuvien ottaminen edellyttää kahden perusasian ymmärtämistä.
 3-D ANAGLYFIKUVIEN TUOTTAMINEN Fotogrammetrian ja kaukokartoituksen laboratorio Teknillinen korkeakoulu Petri Rönnholm Perustyövaiheet: A. Ota stereokuvapari B. Poista vasemmasta kuvasta vihreä ja sininen
3-D ANAGLYFIKUVIEN TUOTTAMINEN Fotogrammetrian ja kaukokartoituksen laboratorio Teknillinen korkeakoulu Petri Rönnholm Perustyövaiheet: A. Ota stereokuvapari B. Poista vasemmasta kuvasta vihreä ja sininen
Ihminen havaitsijana: Luento 10. Jukka Häkkinen ME-C2600
 Ihminen havaitsijana: Luento 10 Jukka Häkkinen ME-C2600 Kevät 2016 1 Luento 10 Kolmiulotteisuus 2 Kolmiulotteisuusvihjeet Okulomotoriset Monokulaarisia Binokulaarisia Muut aistit Akkommodaatio Konvergenssi
Ihminen havaitsijana: Luento 10 Jukka Häkkinen ME-C2600 Kevät 2016 1 Luento 10 Kolmiulotteisuus 2 Kolmiulotteisuusvihjeet Okulomotoriset Monokulaarisia Binokulaarisia Muut aistit Akkommodaatio Konvergenssi
Ihminen havaitsijana: Luento 9. Jukka Häkkinen ME-C2000
 Ihminen havaitsijana: Luento 9 Jukka Häkkinen ME-C2000 Kevät 2018 1 Luento 9 Kolmiulotteisuus 2 Kolmiulotteisuusvihjeet Okulomotoriset Monokulaarisia Binokulaarisia Muut aistit Akkommodaatio Konvergenssi
Ihminen havaitsijana: Luento 9 Jukka Häkkinen ME-C2000 Kevät 2018 1 Luento 9 Kolmiulotteisuus 2 Kolmiulotteisuusvihjeet Okulomotoriset Monokulaarisia Binokulaarisia Muut aistit Akkommodaatio Konvergenssi
Teknillinen Korkeakoulu Fotogrammetrian ja kaukokartoituksen laboratorio Maa-57.270 Fotogrammetrian, kuvatulkinnan ja kaukokartoituksen seminaari
 Teknillinen Korkeakoulu Fotogrammetrian ja kaukokartoituksen laboratorio Maa-57.270 Fotogrammetrian, kuvatulkinnan ja kaukokartoituksen seminaari Phantogrammit Espoossa 22.4.2005 Laura Liikkanen 58271V
Teknillinen Korkeakoulu Fotogrammetrian ja kaukokartoituksen laboratorio Maa-57.270 Fotogrammetrian, kuvatulkinnan ja kaukokartoituksen seminaari Phantogrammit Espoossa 22.4.2005 Laura Liikkanen 58271V
Luento 4 Georeferointi
 Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi Maa Fotogrammetrian perusteet 1
 Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Kokeile kuvasuunnistusta. 3D:nä
 Kokeile kuvasuunnistusta 3D:nä Oheinen 3D-kuvasuunnistus on julkaistu Suunnistaja-lehdessä 1/13. Tämä kuvasuunnistus on toteutettu tarkkuussuunnistuksen aikarastitehtävän mukaisesti. Aikarastilla kartta
Kokeile kuvasuunnistusta 3D:nä Oheinen 3D-kuvasuunnistus on julkaistu Suunnistaja-lehdessä 1/13. Tämä kuvasuunnistus on toteutettu tarkkuussuunnistuksen aikarastitehtävän mukaisesti. Aikarastilla kartta
Luento 4: Kiertomatriisi
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Luento 9. Stereokartoituskojeet
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 9. Stereokartoituskojeet AIHEITA Analogiset stereokartoituskojeet Analyyttiset stereokartoituskojeet Digitaalinen
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 9. Stereokartoituskojeet AIHEITA Analogiset stereokartoituskojeet Analyyttiset stereokartoituskojeet Digitaalinen
Luento 7 Stereokartoituskojeet Maa Fotogrammetrian perusteet 1
 Luento 7 Stereokartoituskojeet 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2008 Maa-57.1030 Fotogrammetrian perusteet 2 Fotogrammetrinen prosessi 2008
Luento 7 Stereokartoituskojeet 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2008 Maa-57.1030 Fotogrammetrian perusteet 2 Fotogrammetrinen prosessi 2008
Luento 7 Stereokartoituskojeet. 2007 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 7 Stereokartoituskojeet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2 Fotogrammetrinen prosessi 3 Stereokartoituskoje Stereokartoituskojeessa kuvaparin stereoskooppinen tarkastelu ja tarkka
Luento 7 Stereokartoituskojeet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2 Fotogrammetrinen prosessi 3 Stereokartoituskoje Stereokartoituskojeessa kuvaparin stereoskooppinen tarkastelu ja tarkka
Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Luento 7: Fotogrammetrinen mittausprosessi
 7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
Luento 8: Kolmiointi AIHEITA. Kolmiointi. Maa-57.301 Fotogrammetrian yleiskurssi. Luento-ohjelma 1 2 3 4 5 6 7 8 9 10
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Luento 6: 3-D koordinaatit
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
 MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
Luento 3: Keskusprojektiokuvaus
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 11.3.2003, Päivityksiä: Katri Koistinen, 20.1.2004) Luento 3: Keskusprojektiokuvaus
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 11.3.2003, Päivityksiä: Katri Koistinen, 20.1.2004) Luento 3: Keskusprojektiokuvaus
Luento 11: Stereomallin ulkoinen orientointi
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
(Petri Rönnholm / Henrik Haggrén, ) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot.
 Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot.") Maa-57.301 Fotogrammetrian yleiskurssi (Petri Rönnholm / Henrik Haggrén, 12.9.2005) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot. Mitä pitäisi oppia? Palauttaa
Maa-57.301 Fotogrammetrian yleiskurssi (Petri Rönnholm / Henrik Haggrén, 12.9.2005) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot. Mitä pitäisi oppia? Palauttaa
Fotogrammetrian termistöä
 Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Luento 10 3-D maailma. fotogrammetriaan ja kaukokartoitukseen
 Luento 10 3-D maailma 1 Luennot 2007 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 10 3-D maailma 1 Luennot 2007 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
GEOMETRIA MAA3 Geometrian perusobjekteja ja suureita
 GEOMETRI M3 Geometrian perusobjekteja ja suureita Piste ja suora: Piste, suora ja taso ovat geometrian peruskäsitteitä, joita ei määritellä. Voidaan ajatella, että kaikki geometriset kuviot koostuvat pisteistä.
GEOMETRI M3 Geometrian perusobjekteja ja suureita Piste ja suora: Piste, suora ja taso ovat geometrian peruskäsitteitä, joita ei määritellä. Voidaan ajatella, että kaikki geometriset kuviot koostuvat pisteistä.
Tekijä Pitkä matematiikka
 K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
Katja Lehtinen, Pauliina Marttila, Pia Olkinuora TEHTÄVÄPAKETTI
 TEHTÄVÄPAKETTI Tämä tehtäväpaketti on suunniteltu optometrian opiskelijoille/opettajille ja muille asiasta kiinnostuneille. Optometrian opiskelijat voivat hyödyntää tehtäviä muun muassa tenttiin valmistautumisessaan.
TEHTÄVÄPAKETTI Tämä tehtäväpaketti on suunniteltu optometrian opiskelijoille/opettajille ja muille asiasta kiinnostuneille. Optometrian opiskelijat voivat hyödyntää tehtäviä muun muassa tenttiin valmistautumisessaan.
7.4 PERUSPISTEIDEN SIJAINTI
 67 7.4 PERUSPISTEIDEN SIJAINTI Optisen systeemin peruspisteet saadaan systeemimatriisista. Käytetään seuraavan kuvan merkintöjä: Kuvassa sisäänmenotaso on ensimmäisen linssin ensimmäisessä pinnassa eli
67 7.4 PERUSPISTEIDEN SIJAINTI Optisen systeemin peruspisteet saadaan systeemimatriisista. Käytetään seuraavan kuvan merkintöjä: Kuvassa sisäänmenotaso on ensimmäisen linssin ensimmäisessä pinnassa eli
Geometrinen optiikka. Tasopeili. P = esinepiste P = kuvapiste
 Geometrinen optiikka Tasopeili P = esinepiste P = kuvapiste Valekuva eli virtuaalinen kuva koska säteiden jatkeet leikkaavat (vs. todellinen kuva, joka muodostuu itse säteiden leikkauspisteeseen) Tasomainen
Geometrinen optiikka Tasopeili P = esinepiste P = kuvapiste Valekuva eli virtuaalinen kuva koska säteiden jatkeet leikkaavat (vs. todellinen kuva, joka muodostuu itse säteiden leikkauspisteeseen) Tasomainen
Valo, valonsäde, väri
 Kokeellista fysiikkaa luokanopettajille Ari Hämäläinen kevät 2005 Valo, valonsäde, väri Näkeminen, valonlähteet Pimeässä ei ole valoa, eikä pimeässä näe. Näkeminen perustuu esineiden lähettämään valoon,
Kokeellista fysiikkaa luokanopettajille Ari Hämäläinen kevät 2005 Valo, valonsäde, väri Näkeminen, valonlähteet Pimeässä ei ole valoa, eikä pimeässä näe. Näkeminen perustuu esineiden lähettämään valoon,
Kolmiulotteiset näyttötekniikat
 Kolmiulotteiset näyttötekniikat T-111.2211 Informaatioverkostot: Studio 4 Espoossa, 7.5.2010 Antti Vuorela antti.vuorela@tkk.fi Tiivistelmä Tässä esseessä käsittelen kolmiulotteisten vaikutelman esittämiseen
Kolmiulotteiset näyttötekniikat T-111.2211 Informaatioverkostot: Studio 4 Espoossa, 7.5.2010 Antti Vuorela antti.vuorela@tkk.fi Tiivistelmä Tässä esseessä käsittelen kolmiulotteisten vaikutelman esittämiseen
Autostereoskooppinen näyttö
 Maa-57.270 Fotogrammetrian seminaarityö Autostereoskooppinen näyttö 2005 Jaakko Järvinen Sisällysluettelo 1. Johdanto...3 2. Komposiittikuvat autostereoskooppisten kuvien toteutuksessa... 3 2.1 Juovallisen
Maa-57.270 Fotogrammetrian seminaarityö Autostereoskooppinen näyttö 2005 Jaakko Järvinen Sisällysluettelo 1. Johdanto...3 2. Komposiittikuvat autostereoskooppisten kuvien toteutuksessa... 3 2.1 Juovallisen
Luento 6: Stereo- ja jonomallin muodostaminen
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Grä sbö len tuulivöimähänke: Kuväsövitteet
 Grä sbö len tuulivöimähänke: Kuväsövitteet 1. Yleistä: Kaikissa kuvasovitteissa on käytetty tuulivoimalatyyppiä Nordex N117 2.4 MW. Napakorkeus: 141 m Lavan pituus: 58,5 m Roottorin halkaisija: 117 m Menetelmä:
Grä sbö len tuulivöimähänke: Kuväsövitteet 1. Yleistä: Kaikissa kuvasovitteissa on käytetty tuulivoimalatyyppiä Nordex N117 2.4 MW. Napakorkeus: 141 m Lavan pituus: 58,5 m Roottorin halkaisija: 117 m Menetelmä:
Vanhoja koetehtäviä. Analyyttinen geometria 2016
 Vanhoja koetehtäviä Analyyttinen geometria 016 1. Määritä luvun a arvo, kun piste (,3) on käyrällä a(3x + a) = (y - 1). Suora L kulkee pisteen (5,1) kautta ja on kohtisuorassa suoraa 6x + 7y - 19 = 0 vastaan.
Vanhoja koetehtäviä Analyyttinen geometria 016 1. Määritä luvun a arvo, kun piste (,3) on käyrällä a(3x + a) = (y - 1). Suora L kulkee pisteen (5,1) kautta ja on kohtisuorassa suoraa 6x + 7y - 19 = 0 vastaan.
Stereokameran tarkkuuden mittausmenetelmä lisätyn todellisuuden
 TEKNILLINEN KORKEAKOULU Mediatekniikan laitos Diplomityö Mikko Kytö Stereokameran tarkkuuden mittausmenetelmä lisätyn todellisuuden sovellusalueella Valvoja Professori Pirkko Oittinen Ohjaaja Mikko Nuutinen
TEKNILLINEN KORKEAKOULU Mediatekniikan laitos Diplomityö Mikko Kytö Stereokameran tarkkuuden mittausmenetelmä lisätyn todellisuuden sovellusalueella Valvoja Professori Pirkko Oittinen Ohjaaja Mikko Nuutinen
Riemannin pintojen visualisoinnista
 Riemannin pintojen visualisoinnista eli Funktioiden R R kuvaajat Simo K. Kivelä 7.7.6 Tarkastelun kohteena olkoon kompleksimuuttujan kompleksiarvoinen funktio f : C C, f(z) = w eli f(x + iy) = u(x, y)
Riemannin pintojen visualisoinnista eli Funktioiden R R kuvaajat Simo K. Kivelä 7.7.6 Tarkastelun kohteena olkoon kompleksimuuttujan kompleksiarvoinen funktio f : C C, f(z) = w eli f(x + iy) = u(x, y)
Suora 1/5 Sisältö ESITIEDOT: vektori, koordinaatistot, piste
 Suora 1/5 Sisältö KATSO MYÖS:, vektorialgebra, geometriset probleemat, taso Suora geometrisena peruskäsitteenä Pisteen ohella suora on geometrinen peruskäsite, jota varsinaisesti ei määritellä. Alkeisgeometriassa
Suora 1/5 Sisältö KATSO MYÖS:, vektorialgebra, geometriset probleemat, taso Suora geometrisena peruskäsitteenä Pisteen ohella suora on geometrinen peruskäsite, jota varsinaisesti ei määritellä. Alkeisgeometriassa
RATKAISUT: 19. Magneettikenttä
 Physica 9 1. painos 1(6) : 19.1 a) Magneettivuo määritellään kaavalla Φ =, jossa on magneettikenttää vastaan kohtisuorassa olevan pinnan pinta-ala ja on magneettikentän magneettivuon tiheys, joka läpäisee
Physica 9 1. painos 1(6) : 19.1 a) Magneettivuo määritellään kaavalla Φ =, jossa on magneettikenttää vastaan kohtisuorassa olevan pinnan pinta-ala ja on magneettikentän magneettivuon tiheys, joka läpäisee
Tekijä Pitkä matematiikka
 Tekijä Pitkä matematiikka 5..017 110 Valitaan suoralta kaksi pistettä ja piirretään apukolmio, josta koordinaattien muutokset voidaan lukea. Vaakasuoran suoran kulmakerroin on nolla. y Suoran a kulmakerroin
Tekijä Pitkä matematiikka 5..017 110 Valitaan suoralta kaksi pistettä ja piirretään apukolmio, josta koordinaattien muutokset voidaan lukea. Vaakasuoran suoran kulmakerroin on nolla. y Suoran a kulmakerroin
Kolmioitten harjoituksia. Säännöllisten monikulmioitten harjoituksia. Pythagoraan lauseeseen liittyviä harjoituksia
 Kolmioitten harjoituksia Piirrä kolmio, jonka sivujen pituudet ovat 4cm, 5 cm ja 10 cm. Minkä yleisen kolmion sivujen pituuksia ja niitten eroja koskevan johtopäätöksen vedät? Määritä huippukulman α suuruus,
Kolmioitten harjoituksia Piirrä kolmio, jonka sivujen pituudet ovat 4cm, 5 cm ja 10 cm. Minkä yleisen kolmion sivujen pituuksia ja niitten eroja koskevan johtopäätöksen vedät? Määritä huippukulman α suuruus,
Kenguru 2018 Cadet (8. ja 9. luokka)
") sivu 0 / 8 NIMI LUOKKA Pisteet: Kenguruloikan pituus: Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto. Oikeasta vastauksesta saa 3, 4 tai 5 pistettä.
sivu 0 / 8 NIMI LUOKKA Pisteet: Kenguruloikan pituus: Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto. Oikeasta vastauksesta saa 3, 4 tai 5 pistettä.
8.3 KAMERAT Neulanreikäkamera
 88 Analysoitava valo tulee vasemmalta. Se okusoidaan kapeaan rakoon S (tulorako), josta se kollimoidaan linssillä L yhdensuuntaiseksi sädekimpuksi. Rako S on siis linssin polttovälin päässä linssistä.
88 Analysoitava valo tulee vasemmalta. Se okusoidaan kapeaan rakoon S (tulorako), josta se kollimoidaan linssillä L yhdensuuntaiseksi sädekimpuksi. Rako S on siis linssin polttovälin päässä linssistä.
Stereopaikannusjärjestelmän tarkkuus (3 op)
") Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Hans Pihlajamäki Fysiikan kotitutkimus
 Fysiikan kotitutkimus Fysiikan 1. kurssi, Rauman Lyseon lukio Johdanto 1. Saaristo- ja rannikkonavigoinnissa on tärkeää kyetä havainnoimaan väyliä osoittavia väylämerkkejä. Pimeän aikaan liikuttaessa tehokkaalla
Fysiikan kotitutkimus Fysiikan 1. kurssi, Rauman Lyseon lukio Johdanto 1. Saaristo- ja rannikkonavigoinnissa on tärkeää kyetä havainnoimaan väyliä osoittavia väylämerkkejä. Pimeän aikaan liikuttaessa tehokkaalla
RATKAISUT: 16. Peilit ja linssit
 Physica 9 1 painos 1(6) : 161 a) Kupera linssi on linssi, jonka on keskeltä paksumpi kuin reunoilta b) Kupera peili on peili, jossa heijastava pinta on kaarevan pinnan ulkopinnalla c) Polttopiste on piste,
Physica 9 1 painos 1(6) : 161 a) Kupera linssi on linssi, jonka on keskeltä paksumpi kuin reunoilta b) Kupera peili on peili, jossa heijastava pinta on kaarevan pinnan ulkopinnalla c) Polttopiste on piste,
1.2 Kulma. Kulmien luokittelua. Paralleeliaksiooma
 1.2 Kulma. Kulmien luokittelua. Paralleeliaksiooma Pisteen, suoran ja tason avulla lähdetään muodostamaan uusia geometrian käsitteitä. Jos suora sahataan (keskeltä!!) poikki ja heitetään toinen puoli pois,
1.2 Kulma. Kulmien luokittelua. Paralleeliaksiooma Pisteen, suoran ja tason avulla lähdetään muodostamaan uusia geometrian käsitteitä. Jos suora sahataan (keskeltä!!) poikki ja heitetään toinen puoli pois,
Liite 2. Maisema- ja kulttuuriympäristön karttatarkastelu, näkemäalueanalyysien tulokset ja kuvasovitteet
 Liite 2 Maisema- ja kulttuuriympäristön karttatarkastelu, näkemäalueanalyysien tulokset ja kuvasovitteet 2 (33) SISÄLTÖ 1 NÄKEMÄALUEANALYYSIT... 3 2 KUVASOVITTEET... 12 3 (33) 1 Näkemäalueanalyysit Näkemäalueanalyysi
Liite 2 Maisema- ja kulttuuriympäristön karttatarkastelu, näkemäalueanalyysien tulokset ja kuvasovitteet 2 (33) SISÄLTÖ 1 NÄKEMÄALUEANALYYSIT... 3 2 KUVASOVITTEET... 12 3 (33) 1 Näkemäalueanalyysit Näkemäalueanalyysi
Ympyrän yhtälö
 Ympyrän yhtälö ANALYYTTINEN GEOMETRIA MAA4 On melko selvää, että origokeskisen ja r-säteisen ympyrän yhtälö voidaan esittää muodossa x 2 + y 2 = r 2. Vastaavalla tavalla muodostetaan ympyrän yhtälö, jonka
Ympyrän yhtälö ANALYYTTINEN GEOMETRIA MAA4 On melko selvää, että origokeskisen ja r-säteisen ympyrän yhtälö voidaan esittää muodossa x 2 + y 2 = r 2. Vastaavalla tavalla muodostetaan ympyrän yhtälö, jonka
Pyhäjoen kunta ja Raahen kaupunki Maanahkiaisen merituulivoimapuiston osayleiskaava
 82127096 Pyhäjoen kunta ja Raahen kaupunki Maanahkiaisen merituulivoimapuiston osayleiskaava Kaavaehdotus 20.11.2012 Tuulivoimalamuodostelmien esteettiset ominaisuudet Tuulivoimaloiden keskittäminen usean
82127096 Pyhäjoen kunta ja Raahen kaupunki Maanahkiaisen merituulivoimapuiston osayleiskaava Kaavaehdotus 20.11.2012 Tuulivoimalamuodostelmien esteettiset ominaisuudet Tuulivoimaloiden keskittäminen usean
Ota tämä paperi mukaan, merkkaa siihen omat vastauksesi ja tarkista oikeat vastaukset klo 11:30 jälkeen osoitteesta
 MAA5.2 Loppukoe 26.9.2012 Jussi Tyni Valitse 6 tehtävää Muista merkitä vastauspaperiin oma nimesi ja tee etusivulle pisteytysruudukko Kaikkiin tehtävien ratkaisuihin välivaiheet näkyviin! 1. Olkoon vektorit
MAA5.2 Loppukoe 26.9.2012 Jussi Tyni Valitse 6 tehtävää Muista merkitä vastauspaperiin oma nimesi ja tee etusivulle pisteytysruudukko Kaikkiin tehtävien ratkaisuihin välivaiheet näkyviin! 1. Olkoon vektorit
VEKTORIT paikkavektori OA
 paikkavektori OA Piste A = (2, -1) Paikkavektori OA = 2i j 3D: kuvan piirtäminen hankalaa Piste A = (2, -3, 4) Paikkavektori OA = 2i 3j + 4k Piste A = (a 1, a 2, a 3 ) Paikkavektori OA = a 1 i + a 2 j
paikkavektori OA Piste A = (2, -1) Paikkavektori OA = 2i j 3D: kuvan piirtäminen hankalaa Piste A = (2, -3, 4) Paikkavektori OA = 2i 3j + 4k Piste A = (a 1, a 2, a 3 ) Paikkavektori OA = a 1 i + a 2 j
HDR- ja stereoskooppinen 3D: kuvaus, koodaus ja näyttö. Mikko Nuutinen 21.2.2013
 HDR- ja stereoskooppinen 3D: kuvaus, koodaus ja näyttö Mikko Nuutinen 21.2.2013 Luento HDR-kuvaus, -koodaus ja -esitys Stereoskooppinen 3D: kuvaus, koodaus ja esitys Oppimistavoitteet HDR-kuvan tuotto
HDR- ja stereoskooppinen 3D: kuvaus, koodaus ja näyttö Mikko Nuutinen 21.2.2013 Luento HDR-kuvaus, -koodaus ja -esitys Stereoskooppinen 3D: kuvaus, koodaus ja esitys Oppimistavoitteet HDR-kuvan tuotto
KERTAUS KERTAUSTEHTÄVIÄ K1. P( 1) = 3 ( 1) + 2 ( 1) ( 1) 3 = = 4
 = 3 ( 1) + 2 ( 1) ( 1) 3 = = 4") KERTAUS KERTAUSTEHTÄVIÄ K1. P( 1) = 3 ( 1) + ( 1) + 3 ( 1) 3 = 3 + 3 = 4 K. a) x 3x + 7x 5x = 4x + 4x b) 5x 3 (1 x ) = 5x 3 1 + x = 6x 4 c) (x + 3)(x 4) = x 3 4x + 3x 1 = x 3 + 3x 4x 1 Vastaus: a) 4x +
KERTAUS KERTAUSTEHTÄVIÄ K1. P( 1) = 3 ( 1) + ( 1) + 3 ( 1) 3 = 3 + 3 = 4 K. a) x 3x + 7x 5x = 4x + 4x b) 5x 3 (1 x ) = 5x 3 1 + x = 6x 4 c) (x + 3)(x 4) = x 3 4x + 3x 1 = x 3 + 3x 4x 1 Vastaus: a) 4x +
Piirrä kirjaan vaikuttavat voimat oikeissa suhteissa toisiinsa nähden. Kaikki kappaleet ovat paikallaan
 Voimakuvioita kirja Piirrä kirjaan vaikuttavat voimat oikeissa suhteissa toisiinsa nähden. Kaikki kappaleet ovat paikallaan Kirja lattialla Kirja, jota painetaan kepillä Kirja, jota painetaan seinään Kirja,
Voimakuvioita kirja Piirrä kirjaan vaikuttavat voimat oikeissa suhteissa toisiinsa nähden. Kaikki kappaleet ovat paikallaan Kirja lattialla Kirja, jota painetaan kepillä Kirja, jota painetaan seinään Kirja,
MAB3 - Harjoitustehtävien ratkaisut:
 MAB3 - Harjoitustehtävien ratkaisut: 1 Funktio 1.1 Piirretään koordinaatistoakselit ja sijoitetaan pisteet: 1 1. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä.
MAB3 - Harjoitustehtävien ratkaisut: 1 Funktio 1.1 Piirretään koordinaatistoakselit ja sijoitetaan pisteet: 1 1. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä.
Teoreettisia perusteita II
 Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Luento 3: Kuvahavainnot
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
1 2 x2 + 1 dx. (2p) x + 2dx. Kummankin integraalin laskeminen oikein (vastaukset 12 ja 20 ) antaa erikseen (2p) (integraalifunktiot
 x + 2dx. Kummankin integraalin laskeminen oikein (vastaukset 12 ja 20 ) antaa erikseen (2p) (integraalifunktiot") Helsingin yliopisto, Itä-Suomen yliopisto, Jyväskylän yliopisto, Oulun yliopisto, Tampereen yliopisto ja Turun yliopisto Matematiikan valintakoe (Ratkaisut ja pisteytys) 500 Kustakin tehtävästä saa maksimissaan
Helsingin yliopisto, Itä-Suomen yliopisto, Jyväskylän yliopisto, Oulun yliopisto, Tampereen yliopisto ja Turun yliopisto Matematiikan valintakoe (Ratkaisut ja pisteytys) 500 Kustakin tehtävästä saa maksimissaan
Grä sbö len tuulivöimähänke: Kuväsövitteet
 Grä sbö len tuulivöimähänke: Kuväsövitteet 1. Yleistä: Kaikissa kuvasovitteissa on käytetty tuulivoimalatyyppiä Enercon E101 3MW. Napakorkeus: 135,4 m Lavan pituus: 50,5 m Roottorin halkaisija: 101 m Menetelmä:
Grä sbö len tuulivöimähänke: Kuväsövitteet 1. Yleistä: Kaikissa kuvasovitteissa on käytetty tuulivoimalatyyppiä Enercon E101 3MW. Napakorkeus: 135,4 m Lavan pituus: 50,5 m Roottorin halkaisija: 101 m Menetelmä:
Tekijä Pitkä matematiikka Pisteen (x, y) etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.
 etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.") Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
Ristiniityn ja Välikankaan tuulivoimahanke, Haapajärvi
 SUUNNITTELU JA TEKNIIKKA INFINERGIES FINLAND OY Ristiniityn ja Välikankaan tuulivoimahanke, Haapajärvi Vestas V126 hh147m FCG SUUNNITTELU JA TEKNIIKKA OY 7.9.2015 P23690 FCG SUUNNITTELU JA TEKNIIKKA OY
SUUNNITTELU JA TEKNIIKKA INFINERGIES FINLAND OY Ristiniityn ja Välikankaan tuulivoimahanke, Haapajärvi Vestas V126 hh147m FCG SUUNNITTELU JA TEKNIIKKA OY 7.9.2015 P23690 FCG SUUNNITTELU JA TEKNIIKKA OY
Kuusiselän osayleiskaavan vaikutukset matkailuun
 Kuusiselän osayleiskaavan vaikutukset Timo Huhtinen 22.12.2016 2 (10) 22.12.2016 Kuusiselän osayleiskaavan vaikutukset SISÄLTÖ 1 SELVITYKSEN TARKOITUS... 3 2 LAPIN MATKAILUN MAANKÄYTTÖSTRATEGIA 2040...
Kuusiselän osayleiskaavan vaikutukset Timo Huhtinen 22.12.2016 2 (10) 22.12.2016 Kuusiselän osayleiskaavan vaikutukset SISÄLTÖ 1 SELVITYKSEN TARKOITUS... 3 2 LAPIN MATKAILUN MAANKÄYTTÖSTRATEGIA 2040...
Stereoskooppisen kuvan geometristen vääristymien visualisointi, havaitseminen ja vaikutus koettuun syvyysvaikutelman luonnollisuuteen
 Aalto-yliopisto Perustieteiden korkeakoulu Tietotekniikan tutkinto-ohjelma Jussi Litja Stereoskooppisen kuvan geometristen vääristymien visualisointi, havaitseminen ja vaikutus koettuun syvyysvaikutelman
Aalto-yliopisto Perustieteiden korkeakoulu Tietotekniikan tutkinto-ohjelma Jussi Litja Stereoskooppisen kuvan geometristen vääristymien visualisointi, havaitseminen ja vaikutus koettuun syvyysvaikutelman
Stereoskooppisen kuvan koodaus
 Stereoskooppisen kuvan koodaus T-75.2122 Visuaalisen mediatekniikan perusteet Mikko Kytö, Mikko Kuhna Mediatekniikan laitos Määritelmistä Stereoskooppinen media Käyttäminen tapahtuu stereonäön kautta,
Stereoskooppisen kuvan koodaus T-75.2122 Visuaalisen mediatekniikan perusteet Mikko Kytö, Mikko Kuhna Mediatekniikan laitos Määritelmistä Stereoskooppinen media Käyttäminen tapahtuu stereonäön kautta,
T FYYSINEN TURVALLISUUS. - Videovalvontajärjestelmä. Harri Koskenranta
 T-110.460 FYYSINEN TURVALLISUUS - Videovalvontajärjestelmä Harri Koskenranta 14.4.05 14.4.2005 T-110.460 Koskenranta 1 SUOJAUKSET UHKAT VAHINGOT TURVALLISUUSVALVONTA 14.4.2005 T-110.460 Koskenranta 2 VIDEOVALVONTA
T-110.460 FYYSINEN TURVALLISUUS - Videovalvontajärjestelmä Harri Koskenranta 14.4.05 14.4.2005 T-110.460 Koskenranta 1 SUOJAUKSET UHKAT VAHINGOT TURVALLISUUSVALVONTA 14.4.2005 T-110.460 Koskenranta 2 VIDEOVALVONTA
2.1 Yhdenmuotoiset suorakulmaiset kolmiot
 2.1 Yhdenmuotoiset suorakulmaiset kolmiot 2.2 Kulman tangentti 2.3 Sivun pituus tangentin avulla 2.4 Kulman sini ja kosini 2.5 Trigonometristen funktioiden käyttöä 2.7 Avaruuskappaleita 2.8 Lieriö 2.9
2.1 Yhdenmuotoiset suorakulmaiset kolmiot 2.2 Kulman tangentti 2.3 Sivun pituus tangentin avulla 2.4 Kulman sini ja kosini 2.5 Trigonometristen funktioiden käyttöä 2.7 Avaruuskappaleita 2.8 Lieriö 2.9
 KULJETUSSUUREET Kuljetussuureilla tai -ominaisuuksilla tarkoitetaan kaasumaisen, nestemäisen tai kiinteän väliaineen kykyä siirtää ainetta, energiaa, tai jotain muuta fysikaalista ominaisuutta paikasta
KULJETUSSUUREET Kuljetussuureilla tai -ominaisuuksilla tarkoitetaan kaasumaisen, nestemäisen tai kiinteän väliaineen kykyä siirtää ainetta, energiaa, tai jotain muuta fysikaalista ominaisuutta paikasta
Stereoskooppinen video CAVE-ympäristössä
 Ella Ruokokoski Stereoskooppinen video CAVE-ympäristössä Metropolia Ammattikorkeakoulu Insinööri (AMK) Mediatekniikan koulutusohjelma Insinöörityö 14.4.2015 Abstract Tekijä Otsikko Sivumäärä Aika Ella
Ella Ruokokoski Stereoskooppinen video CAVE-ympäristössä Metropolia Ammattikorkeakoulu Insinööri (AMK) Mediatekniikan koulutusohjelma Insinöörityö 14.4.2015 Abstract Tekijä Otsikko Sivumäärä Aika Ella
Mikko Leino. Stereoskooppisen kuvan laboratorioympäristön määrittely ja testaus. Metropolia Ammattikorkeakoulu Mediatekniikan koulutusohjelma
 Metropolia Ammattikorkeakoulu Mediatekniikan koulutusohjelma Mikko Leino Stereoskooppisen kuvan laboratorioympäristön määrittely ja testaus Insinöörityö 8.11.2010 Ohjaaja: kehitysinsinööri Matti Paasonen
Metropolia Ammattikorkeakoulu Mediatekniikan koulutusohjelma Mikko Leino Stereoskooppisen kuvan laboratorioympäristön määrittely ja testaus Insinöörityö 8.11.2010 Ohjaaja: kehitysinsinööri Matti Paasonen
a) Arkistokatu ja Maaherrankatu ovat yhdensuuntaiset. Väite siis pitää paikkansa.
 Arkistokatu ja Maaherrankatu ovat yhdensuuntaiset. Väite siis pitää paikkansa.") Tekijä MAA3 Geometria 14.8.2016 1 a) Arkistokatu ja Maaherrankatu ovat yhdensuuntaiset. Väite siis pitää paikkansa. b) Pirttiniemenkatu ja Tenholankatu eivät ole yhdensuuntaisia. Väite ei siis pidä paikkaansa.
Tekijä MAA3 Geometria 14.8.2016 1 a) Arkistokatu ja Maaherrankatu ovat yhdensuuntaiset. Väite siis pitää paikkansa. b) Pirttiniemenkatu ja Tenholankatu eivät ole yhdensuuntaisia. Väite ei siis pidä paikkaansa.
Vektorien pistetulo on aina reaaliluku. Esimerkiksi vektorien v = (3, 2, 0) ja w = (1, 2, 3) pistetulo on
 ja w = (1, 2, 3) pistetulo on") 13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
1. Lineaarinen optimointi
 0 1. Lineaarinen optimointi 1. Lineaarinen optimointi 1.1 Johdatteleva esimerkki Esimerkki 1.1.1 Giapetto s Woodcarving inc. valmistaa kahdenlaisia puuleluja: sotilaita ja junia. Sotilaan myyntihinta on
0 1. Lineaarinen optimointi 1. Lineaarinen optimointi 1.1 Johdatteleva esimerkki Esimerkki 1.1.1 Giapetto s Woodcarving inc. valmistaa kahdenlaisia puuleluja: sotilaita ja junia. Sotilaan myyntihinta on
Suorien ja tasojen geometriaa Suorien ja tasojen yhtälöt
 6. Suorien tasojen geometriaa 6.1. Suorien tasojen yhtälöt 55. Osoita, että yhtälöt x = 3 + τ y = 1 3τ esittävät samaa tason suoraa. Yhteinen piste 1,5) suunta i 3j. x = 1 6τ y = 5 + 9τ 56. Määritä suoran
6. Suorien tasojen geometriaa 6.1. Suorien tasojen yhtälöt 55. Osoita, että yhtälöt x = 3 + τ y = 1 3τ esittävät samaa tason suoraa. Yhteinen piste 1,5) suunta i 3j. x = 1 6τ y = 5 + 9τ 56. Määritä suoran
MAB3 - Harjoitustehtävien ratkaisut:
 MAB - Harjoitustehtävien ratkaisut: Funktio. Piirretään koordinaatistoakselit ja sijoitetaan pisteet:. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä. Funktiolla
MAB - Harjoitustehtävien ratkaisut: Funktio. Piirretään koordinaatistoakselit ja sijoitetaan pisteet:. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä. Funktiolla
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry)
") Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
Pistetulo eli skalaaritulo
 Pistetulo eli skalaaritulo VEKTORIT, MAA4 Pistetulo on kahden vektorin välinen tulo. Tarkastellaan ensin kahden vektorin välistä kulmaa. Vektorien a ja, kun a 0, välinen kulma on (kuva) kovera kun a vektorit
Pistetulo eli skalaaritulo VEKTORIT, MAA4 Pistetulo on kahden vektorin välinen tulo. Tarkastellaan ensin kahden vektorin välistä kulmaa. Vektorien a ja, kun a 0, välinen kulma on (kuva) kovera kun a vektorit
2.3 Voiman jakaminen komponentteihin
 Seuraavissa kappaleissa tarvitaan aina silloin tällöin taitoa jakaa voima komponentteihin sekä myös taitoa suorittaa sille vastakkainen operaatio eli voimien resultantin eli kokonaisvoiman laskeminen.
Seuraavissa kappaleissa tarvitaan aina silloin tällöin taitoa jakaa voima komponentteihin sekä myös taitoa suorittaa sille vastakkainen operaatio eli voimien resultantin eli kokonaisvoiman laskeminen.
Luento 4: Kuvien geometrinen tulkinta
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kuvien geometrinen tulkinta AIHEITA Muunnokset informaatiokanavassa Geometrisen tulkinnan vaihtoehdot Mittakaava
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kuvien geometrinen tulkinta AIHEITA Muunnokset informaatiokanavassa Geometrisen tulkinnan vaihtoehdot Mittakaava
PL 186, 01531 VANTAA, FINLAND, puh. 358 (0)9 4250 11, Faksi 358 (0)9 4250 2898
9 4250 11, Faksi 358 (0)9 4250 2898") OPS M2-1, Liite 1 21.12.2007 PL 186, 01531 VANTAA, FINLAND, puh. 358 (0)9 4250 11, Faksi 358 (0)9 4250 2898 www.ilmailuhallinto.fi LENTOKONEEN VALOT Huom. Katso luku 6 1. MÄÄRITELMIÄ Kun tässä luvussa
OPS M2-1, Liite 1 21.12.2007 PL 186, 01531 VANTAA, FINLAND, puh. 358 (0)9 4250 11, Faksi 358 (0)9 4250 2898 www.ilmailuhallinto.fi LENTOKONEEN VALOT Huom. Katso luku 6 1. MÄÄRITELMIÄ Kun tässä luvussa
VALONTAITTOMITTARIN KÄYTTÖ
 VALONTAITTOMITTARIN KÄYTTÖ MERKITSE KUVAAN VALONTAITTOMITTARIN OSAT. 1. Okulaarin säätörengas 2. Asteikkorengas 3. Käyttökatkaisin 4. Linssipitimen vapautin 5. Linssialusta 6. Linssipidin 7. Linssipöytä
VALONTAITTOMITTARIN KÄYTTÖ MERKITSE KUVAAN VALONTAITTOMITTARIN OSAT. 1. Okulaarin säätörengas 2. Asteikkorengas 3. Käyttökatkaisin 4. Linssipitimen vapautin 5. Linssialusta 6. Linssipidin 7. Linssipöytä
Maa-57.260. Kameran kalibrointi. TKK/Fotogrammetria/PP
 Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
1.4 Suhteellinen liike
 Suhteellisen liikkeen ensimmäinen esimerkkimme on joskus esitetty kompakysymyksenäkin. Esimerkki 5 Mihin suuntaan ja millä nopeudella liikkuu luoti, joka ammutaan suihkukoneesta mahdollisimman suoraan
Suhteellisen liikkeen ensimmäinen esimerkkimme on joskus esitetty kompakysymyksenäkin. Esimerkki 5 Mihin suuntaan ja millä nopeudella liikkuu luoti, joka ammutaan suihkukoneesta mahdollisimman suoraan
Pyramidi 4 Analyyttinen geometria tehtävien ratkaisut sivu 180 Päivitetty Pyramidi 4 Luku Ensimmäinen julkaistu versio
 Pyramidi 4 Analyyttinen geometria tehtävien ratkaisut sivu 8 Päivitetty 7.5.6 Pyramidi 4 Luku 5..6 Ensimmäinen julkaistu versio 7.5.6 Korjattu tehtävän 56 vastaus Pyramidi 4 Analyyttinen geometria tehtävien
Pyramidi 4 Analyyttinen geometria tehtävien ratkaisut sivu 8 Päivitetty 7.5.6 Pyramidi 4 Luku 5..6 Ensimmäinen julkaistu versio 7.5.6 Korjattu tehtävän 56 vastaus Pyramidi 4 Analyyttinen geometria tehtävien
2 Pistejoukko koordinaatistossa
 Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Jakso 8. Ampèren laki. B-kentän kenttäviivojen piirtäminen
 Jakso 8. Ampèren laki Esimerkki 8.: Johda pitkän suoran virtajohtimen (virta ) aiheuttaman magneettikentän lauseke johtimen ulkopuolella etäisyydellä r johtimesta. Ratkaisu: Käytetään Ampèren lakia C 0
Jakso 8. Ampèren laki Esimerkki 8.: Johda pitkän suoran virtajohtimen (virta ) aiheuttaman magneettikentän lauseke johtimen ulkopuolella etäisyydellä r johtimesta. Ratkaisu: Käytetään Ampèren lakia C 0
Palovaaran ja Ahkiovaaran tuulivoimapuisto, Pello
 Palovaaran ja Ahkiovaaran tuulivoimapuisto, Pello Näkymäalueanalyysi ja valokuvasovitteet VE1: 21 voimalaa, napakorkeus 167 metriä, kokonaiskorkeus 230 metriä VE2: 26 voimalaa, napakorkeus 167 metriä,
Palovaaran ja Ahkiovaaran tuulivoimapuisto, Pello Näkymäalueanalyysi ja valokuvasovitteet VE1: 21 voimalaa, napakorkeus 167 metriä, kokonaiskorkeus 230 metriä VE2: 26 voimalaa, napakorkeus 167 metriä,
1 Ensimmäisen asteen polynomifunktio
 Ensimmäisen asteen polynomifunktio ENNAKKOTEHTÄVÄT. a) f(x) = x 4 b) Nollakohdassa funktio f saa arvon nolla eli kuvaaja kohtaa x-akselin. Kuvaajan perusteella funktion nollakohta on x,. c) Funktion f
Ensimmäisen asteen polynomifunktio ENNAKKOTEHTÄVÄT. a) f(x) = x 4 b) Nollakohdassa funktio f saa arvon nolla eli kuvaaja kohtaa x-akselin. Kuvaajan perusteella funktion nollakohta on x,. c) Funktion f
Solmu 3/2001 Solmu 3/2001. Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä:
 Frégier n lause Simo K. Kivelä Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä: Suorakulmaisen kolmion kaikki kärjet sijaitsevat paraabelilla y = x 2 ; suoran kulman
Frégier n lause Simo K. Kivelä Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä: Suorakulmaisen kolmion kaikki kärjet sijaitsevat paraabelilla y = x 2 ; suoran kulman
Tarkastellaan neliötä, jonka sivun pituus on yksi metri. Silloinhan sen pinta-ala on 1m 1m
 MB: Yhdenmuotoisuus luksi Tämän luvun aiheina ovat yhdenmuotoisuus sekä yhdenmuotoisuussuhde. Kaikkein tavallisimmat yhdenmuotoisuuden sovellukset ovat varmasti kartta ja pohjapiirros. loitamme tutuista
MB: Yhdenmuotoisuus luksi Tämän luvun aiheina ovat yhdenmuotoisuus sekä yhdenmuotoisuussuhde. Kaikkein tavallisimmat yhdenmuotoisuuden sovellukset ovat varmasti kartta ja pohjapiirros. loitamme tutuista