Luento 4: Kolmiointihavainnot
|
|
|
- Jere Ketonen
- 9 vuotta sitten
- Katselukertoja:
Transkriptio
1 Maa Fotogrammetrinen kartoitus Luento-ohjelma Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö Kuvahavainnot suuntahavaintoina Kuvausvirheet Refraktio Karttaprojektio ja maankaarevuus Objektiivin virheet Sisäinen orientointi Kalibrointimenetelmät Goniometrikalibrointi Testikenttäkalibrointi Testikenttäkalibrointi suorassa georeferoinnissa Kirjallisuutta (Alkuperäinen luento: Henrik Haggrén, Muutoksia: Eija Honkavaara ) Reconstruction procedure Reconstruction procedure. Image acquisition (e.g. control survey, targeting, photography, image digitizing) 1

2 Preprocessing (e.g. radiometric transformation, orientation, coordinate transformation, georeferencing) Analysis (e.g. image interpretation, 3D-digitizing, modelling) Scene presentation (e.g. orthophotography, cartography, texture mapping, VRMLmodeling) Kuvahavainnot Kollineaarisuusyhtälö Kuvahavainnot suuntahavaintoina Kolmioinnissa havaintoina käytetään kuvakoordinaatteja, jotka muunnetaan pääpistekeskisiksi kamerakoordinaateiksi. Kamerakoordinaatit vastaavat suuntahavaintoja, jotka ovat tuttuja geodeettisesta paikanmäärityksestä. Tavanomaisessa ilmakuvakamerassa, jonka kuvakoko on 230 mm x 230 mm: o kameravakio c = 150 mm, jolloin 0,001 mm:n eli1 µm:n [mikrometrin, mikronin] erotuskyky kuvahavainnossa vastaa suuntahavainnon erotuskykyä 0,4 mgon kuvan keskellä, ja 0,3 mgon kuvan reunassa, tai o kameravakio c = 210 mm, jolloin 0,001 mm:n erotuskyky kuvahavainnossa vastaa suuntahavainnon erotuskykyä 0,3 mgon kuvan keskellä, ja 0,2 mgon kuvan reunassa. 2

3 Suuntahavaintojen erotuskyky. Measurement of image orientation in the air with subsequent determination of object space quantities on the ground is equivalent to extrapolation. As small errors may have large consequences, system needs to be extremely well calibrated. (Heipke, 2001) Kuvausvirheet Kuvablokin samasuoraisuusehto edellyttää lineaarista kuvausta pisteen kohde- ja kuvakoordinaattien välillä. Poikkeamia aiheuttavat: o karttaprojektio ja maankaarevuus 3

4 o refraktio ilmakehässä o kameran objektiivin virheet o kameran kuvataso eli kuvaportin poikkemat tasomaisuudesta (= poikkeama kuvahavaintojen samatasoisuudesta) o filmin deformoituminen kuvanoton ja mittaushetken välillä Em. virheiden vaikutus voidaan kompensoida joko korjaamalla havaintoja, tai laajentamalla samasuoraisuusehtoa lisäparametrein blokkitasoituksen yhteydessä. Edellisten lisäksi orientointivirheet aiheuttavat poikkeamia samasuoraisuusehdon toteutumiseen. Suoran georeferoinnin menetelmien kehittymisen myötä kuvausvirheet ja kalibrointi ovat jälleen nousemassa tärkeiksi kysymyksiksi. Refraction and earth curvature Refraktio Refraktio. 4

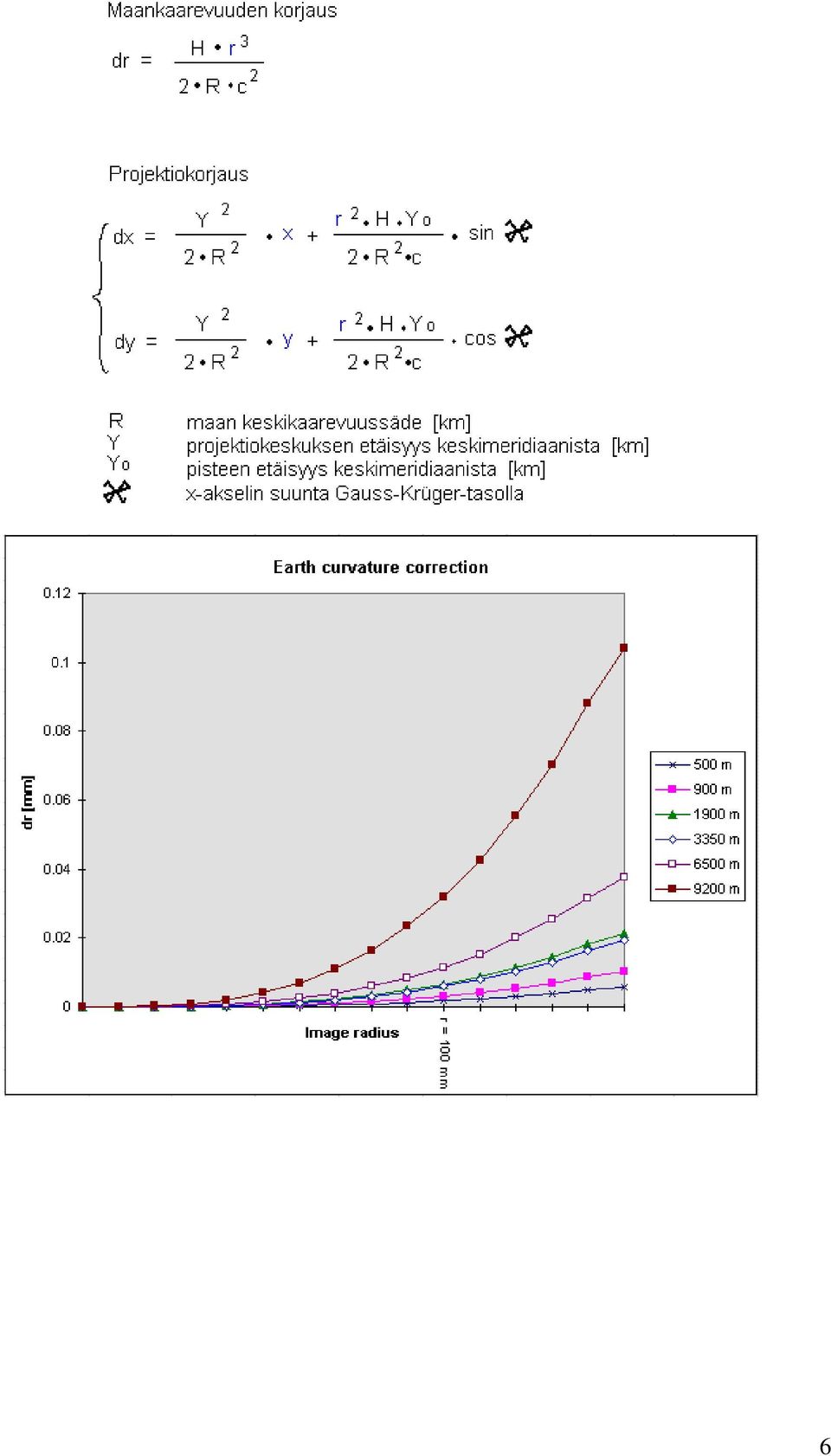
5 Karttaprojektio ja maankaarevuus Maankaarevus ja karttaprojektio. 5

6 6
7 References 1. Marko Ollikainen, The Finnish national grid coordinate system Objektiivin virheet Objektiivin piirtovirheet johtuvat eroista osalinssien refraktio-ominaisuuksissa ja objektiivin valmistuksessa syntyvistä valmistusepätarkkuuksista. Piirtovirhettä tarkastellaan valonsäteen poikkeamana suorasta, joka kulkee kohdepisteen, projektiokeskuksen ja terävänä kuvautuvan kuvapisteen kautta. Piirtovirheen tyypit: symmetrinen radiaalinen piirtovirhe (radial distortion), epäkeskysyys piirtovirhe (decentering distortion) ja epäsäännöllinen piirtovirhe. Piirtovirhe määritetään kuvatasolla joko symmetrisenä tai epäkeskisenä kuvan pääpisteen suhteen. Symmetrinen piirtovirhe on tietyllä etäisyydellä pääpisteestä kaikissa suunnissa sama, ja on radiaalista eli siirtää kuvapistettä joko pääpisteen suuntaan tai siitä poispäin. Epäkeskinen piirtovirhe on symmetrinen pääpisteen kautta kulkevan lävistäjän suhteen, ja voi olla joko radiaalista tai tangentiaalista. Radial distortion 7
, epäkeskysyys piirtovirhe (decentering distortion) ja epäsäännöllinen piirtovirhe.")
8 Radiaalinen piirtovirhe Radiaalisen piirtovirheen syntyminen. Radiaalisen piirtovirheen vaikutus kamerakoordinatteihin. Ks. myös: Esimerkki piirtovirheestä digitaalikameroilla. 8

9 Radiaalinen piirtovirhe kuvan neljän lävistäjän suunnassa. Radiaalinen piirtovirhe arvoina. Radiaalinen piirtovirhe funktiona. 9

10 Kameravakio c on suure, jonka arvo määritetään kamerakalibroinnin yhteydessä. Piirtovirheet dr' lasketaan tällä kameravakion arvolla kuvapisteen pääpiste-etäisyyden r' suhteen.piirtovirhe voitaisiin laskea myös kameravakion korjauksena dc, jolla korjattaisiin pisteen kamerakoordinaattia z = - ( c + dc ). Näin ei kuitenkaan käytännössä tehdä, koska silloin kaikille kuvapisteille saataisiin erisuuruiset z-koordinaatiarvot. Sen sijaan piirtovirheet korjataan kunkin pisteen kamerakoordinaateista x ja y, ja ne saavat samansuuruiset z- koordinaattiarvot ( z = -c ). Tangentiaalinen piirtovirhe Epäkeskisyyspiirtovirhe johtuu osalinssien suuntausvirheestä objektiivin valmistuksessa. 10

11 Epäkeskisyyspiirtovirhe sisältää säteen suuntaisen (radiaalisen) ja sitä vastaan kohtisuoran (tangentialisen) osan. Kuvan lävistäjällä, joka muodostaa kuvan x-akselin kanssa kulman Φ 0, tangentiaalinen osa on suurimmillaan eikä radiaalista osaa ole lainkaan, kun taas tätä vastaan kohtisuoralla lävistäjällä osat ovat päinvastoin. Epäkeskisyyspiirtovirheen vaikutus kamerakoordinaatteihin. 11

12 Image coordinate errors in mm, H=500 m refraction earth curvature lens distortion Image coordinate errors in mm, H=1900 m refraction earth curvature lens distortion Image coordinate errors in mm, H=9200 m refraction lens distortion earth curvature -120 Radius (mm) -120 Radius (mm) -120 Radius (mm) Refraktion, maankaarevuuden ja radiaalisen piirtovirheen vaikutus kuvakoordinaatteihin kuvattaessa 500 m, 1900 m ja 9200 m korkeudesta. Sisäinen orientointi Sisäinen orientointi on kuvattu kameran kalibrointitodistuksessa: o Fotogrammetrian yleiskurssi, luento 4 o vakioreunamerkit, o pääpisteet o kameravakio. Kamerassa voi olla kuvaportin reunamerkkien lisäksi réseau-gitteri. Gitteri on lasilevy, joka sijaitsee kameran kuvaportissa. Gitteri on erittäin tarkka tasavälinen rististö, joka kuvautuu filmille. Gitteriristien avulla kamerakoordinaatisto määritetään tasaisesti yli koko kuva-alan ja tarkemmin kuin pelkillä reunamerkeillä. Tällä on merkitystä korjattaessa kuvahavainnoista filmin muodonmuutoksista aiheutuvia virheitä. Kalibrointimenetelmät Reseau-ristikko kameran kuvaportissa. Komponenttikalibrointi o Systemaattiset virheet määritetään laboratorio-olosuhteissa. Virheet voidaan erottaa toisistaan koejärjestelyin. 12

13 o Kalibroitavat ominaisuudet kameravakio pääpisteet kuvaportti piirtovirheet optiikan ja filmin erotuskyky Testikenttäkalibrointi o Järjestelmän systemaattiset virheet määritetään käytännön olosuhteissa tarkasti tunnetun testikentän avulla. Virheet määritetään blokkitasoituksen yhteydessä ja erotetaan toisistaan lisäparametereina. o Kalibroitavat ominaisuudet kameravakio pääpisteet piirtovirheet filmin muodonmuutosmalli refraktiomalli kuvausjärjestelmän erotuskyky o Nykyisin testikenttäkalibroinnilla määritetään myös GPS/IMU/kamerajärjestelmän kalibrointi. Tällöin keskeisiä kalibroitavia suureita ovat kameravakio, pääpiste ja IMU:n ja kamera-akseliston väliset kallistukset. Itsekalibrointi o Systemaattiset virheet pyritään huomioimaan kartoitusprojektin kolmiointivaiheessa lisäparametrein. Näille estimoidaan arvot samanaikaisesti muiden parametrien avulla. Lisäparametrit määrittyvät blokin sisäisten liitospistehavaintojen ja ulkoisten lähtöpistehavaintojen perusteella. Erona testikenttäkalibrointiin nähden on se, että testikentän lähtöpisteistö on tiheydeltään ylimääritetty, kun taas itsekalibroinnissa lähtöpisteistö on sama, joka kartoitusalueella on käytössä. o Virheiden määritettävyys riippuu suuresti blokin geometriasta. Yleensä tässä määritetään pääpiste symmetrinen piirtovirhe o Luento 5 Perinteisten ilmakuvakameroiden tyypillinen kalibrointimenettely on ollut laboratoriokalibrointi, jota on tarvittaessa täydennetty itsekalibroinnilla. Laboratoriokalibrointi on tyypillisesti suoritettu 2-3 vuoden välein, tai tarvittaessa kun on epäilty kalibroinnin muuttuneen. Testikenttiä on käytetty järjestelmien tarkastuksessa (k.s. Luento 2). GPS/IMUjärjestelmien käyttöönotto ja suorageoreferointi ovat tehneet testikenttäkalibroinnin välttämättömäksi. Testikenttäkalibrointia voidaan tarvittaessa parantaa käyttämällä ns. in-situ kalibrointia (kuvataan kuvausalueella sopiva kalibrointiblokki) tai itsekalibroinnilla. Digitaalisten kameroiden käyttöönotto edellyttää niille soveltujen kalibrointimenettelyjen kehittämistä. Goniometrikalibrointi Goniometri on laite, joka rakentuu kollimaattorin kahdesta kaukoputkesta. Toinen on kiinteä, toinen kiertyy keskisesti asetetun vaakakehän suhteen. Kamera asetetaan 13

14 goniometriin siten,että kameran kuvaportti on kohtisuoraan kiinteätä kollimaatiosuoraa vastaan ja objektiivin tulopupilli luodattu vaakakehän keskipisteen suhteen. Goniometrillä havaitaan objektiivin piirtovirheitä siten, että kuvatasoon asetetaan pääpisteen suhteen keskisesti mitta-asteikko. Mitta-asteikkoa havaitaan kääntyvällä kaukoputkella objektiivin läpi. Vertaamalla vaakakehältä luettuja kulmia mitta-asteikon ja kameravakion avulla laskettuihin kulmiin, voidaan piirtovirheet määrittää. Suomessa olevat goniometrit ovet tyypiltään edellä esitetyn kaltaisia ns. horisontaaligoniometrejä. Ne soveltuvat ilmakuvakameroiden laboratoriokalibrointiin (TKK:ssa, kuvakoko 230 mm x 230 mm, objektiivin polttoväli c = 150 mm) ja pienempien ilmakuva- ja kinofilmikoon kameroiden kalibrointiin (Joensuun yliopistolla, kuvakoot 6 cm x 6 cm ja 24 mm x 36 mm). Vertikaaligoniometreissä on yleensä useita kiinteitä kollimaattorikaukoputkia (esim. NRC:n multikollimaattorigoniometri). Tällaisia ei ole Suomessa. Vertikaaligoniometrin etuna pidetään sitä, että kamera on kalibroinnin ajan kuvausasennossa. Kameran raskaan rakenteen mahdollisesti aiheuttama vaikutus kalibrointitulokseen voidaan näin minimoida. Julkaisuja o Hakkarainen, Juhani, Ilmakuvakameran kaartuman määritys goniometrillä ja ilmakuvan ja ilmakuvausobjektiivin laadun tutkiminen, lisensiaattityö, TKK:n Maanmittausosasto, o Hakkarainen, Juhani, On the Use of the Horizontal Goniometer in the Determination of the Distortion and Image Quality ot Aerial Wide-angle Cameras. Väitöskirja, TKK:n Maanmittausosasto, o ASPRS 2004, Manual of Photogrammetry, Fifth Edition, Chapter 8.5, Calibration. s Goniometrimittauksen periaate. 14

15 TKK:n horisontaaligonometri. Pääpisteet Kameran kalibrointitodistuksessa mainitaan toisinaan pääpiste kolmella eri tavalla: o FC = Fiducial Center, eli reunamerkkien kautta piirrettävien suorien leikkauspiste. Analogiakojeissa pääpisteenä voidaan käyttää ainoastaan FC:tä. Kalibrointitodistuksissa piirtovirheet määritellään yleensä FC:n suhteen ja erikseen kullekin kuvan neljästä päälävistäjästä. o PPA = Principal Point of Autocollimation on objektiivin pääsäteen kuvautumispiste, kun pääsäde yhtyy tulopupillin puolella sellaiseen suoraan, joka on kohtisuorassa kuvatasoa vastaan. o PBS = Principal Point of Best Symmetry on symmetrisen piirtovirheen symmetriapiste, jota käytetään itsekalibroinnin pääpisteenä. Autokollimoitu pääpiste. 15

16 Kuvan erilaiset pääpisteet. Testikenttäkalibrointi Testikenttäkalibrointia tutkittiin erityisesti 1970-luvulla. Testikenttäkalibrointi on noussut jälleen esille suoran georeferoinnin kehittymisen myötä, kalibrointia GPS/IMU-havaintojen ollessa mukana tarkastellaan luennon lopussa. Seuraavassa tiivistelmä 1970-luvulla saaduista tuloksista. o Ilmakuvaus tulee tehdä vähintään kahdessa toisiaan vastaan ristikkäisessä suunnassa. Tällä on erityinen merkitys pääpisteen määritettävyydelle. o Mikäli halutaan määrittää myös kameravakio, testikentän tulee olla mahdollisimman kolmiulotteinen. Tällaisia kartoituskuvauksiin soveltuvia testikenttiä ei Suomessa ole, mutta esimerkiksi Saksassa ja Sveitsissä kylläkin. Aiemmin on käytetty myös tähtitaivasta kamerakalibrointiin, esimerkkinä USA (stellar calibration) Jämijärvellä pisteistö koostuu kahdesta osasta: o 0.8 km x 0.8 km alueella 187 pistettä, XY-keskivirheellä ± 3 mm o 2.0 km x 2.0 km alueella 131 pistettä, XY-keskivirheellä ± 5 mm. ISPRS:n koetyö o Yhteenvetona todettiin mm. seuraavaa Fysikaalinen malli riittää optiikan ja filmin muodonmuutosten määrittämiseen. Kutakin blokkia kohden tulisi käyttää vain yksiä kameraparametreja, mikäli kuvat on samasta kuvauksesta (sama kamera). Jonokohtaisia parametreja pitää välttää. Mikäli jonojen välinen sivupeitto on alle 30 %, lisäparametrien käytössä tulee olla erittäin kriittinen. Lisäparametrien käyttö ei korvaa komponenttikalibrointia. Koetyössä käytetyt kuvaukset Kuvaukset tehtiin Suomessa Jämijärven ja Australiassa Kapundan ja Willungan koekentillä. Jämijärvellä kamerana käytettiin Zeissin RMK A2 ja MRB kameroita, Kapundassa ja Willungassa Zeissin RMK AR kameraa. 16

17 Testikentät Jämijärvi 2.6 km x 2.6 km Kapunda 40 km x 40 km Willunga 3 km x 3 km Koetyön tasoitukset Vertaustasoituksena tehtiin tavanomainen blokkitasoitus sisäinen orientointi affiinisella muunnoksella, havainnoista korjattiin symmetrisen radiaalisen piirtovirheen ja refraktion vaikutukset, kuvahavaintoja painotettiin 1:llä, lähtöpisteitä äärettömällä. Osa koetasoituksista tehtiin lähinnä lisäparametrien käytön vaikutusten selvittämiseksi. Koetuloksia laskettiin kolmella kuvitteellisella lähtöpistekuviolla: harva, medium, tiheä. Testikenttäkalibrointi suorassa georeferoinnissa Kalibroitavia suureita ovat: IMU:n ja kameran akselistojen välinen orientointi (boresight misalignment: fotogrammetrisesti) Eri järjestelmien väliset vektorit (lever arm: geodeettisin menetelmin) o Kamera ja GPS-antenni o IMU ja kamera o IMU ja GPS antenni Eri järjestelmien välinen synkronointi Kameran kalibrointi lento-olosuhteissa (fotogrammetrisesti) Tuntemattomat määritetään blokkitasoituksessa. 17

18 m m b Boresight misalignment: R p = Rb R p, Rotation matrixes: m R p image frame object frame (AT) b R p image frame IMU body frame (boresight) m R b body frame object frame (GPS/IMU) Kuvausvirheiden vaikutuksesta suorassa georeferoinnissa Schenk, 1999 Ylläolevissa kuvissa esitetään sisäisen orientoinnin virheiden vaikutusta fotogrammetriseen pisteenmääritykseen suorassa ja epäsuorassa georeferoinnissa. (a) suora georeferointi, polttovälin virheestä aiheutuva korkeusvirhe siirtyy sellaisenaan korkeuskoordinaattiin kohteessa (b) epäsuora georeferointi: polttovälin virheet absorboituvat projektioksekuksen korkeuskoordinaattiin (c) suora georeferointi: pääpisteen ja polttovälin virheestä aiheutuvat virheet vaikuttavat suoraan maastokoordinaatteihin (d) epäsuora georeferointi: pääpisteen virheestä aiheutuvat virheet absorboituvat suurelta osin ulkoisten orientointien parametreihin Voidaan siis todeta, että epäsuorassa georeferoinnissa sisäisen orientoinnin virheet absorboituvat ulkoisten orientointien parametreihin, kun taas suorassa georeferoinnissa sisäisen orientoinnin virheet siirtyvät maastokoordinaatteihin mittakaavalla skaalattuna. Sisäisen orientoinnin virheiden lisäksi myös kaikki muut kuvausvirheet siirtyvät suoraan määritettäviin parametreihin. Aihepiiriä tutkitaan paraikaa eripuolilla maailmaa. Esimerkki sisäisten orientointien virheiden vaikutuksesta suorassa ja epäsuorassa sensoriorientoinnissa (Schenk 1999: Digital Photogrammetry): 18
 suora georeferointi, polttovälin virheestä aiheutuva korkeusvirhe siirtyy sellaisenaan korkeuskoordinaattiin kohteessa (b) epäsuora georeferointi: polttovälin virheet absorboituvat")
19 Simulointi todellisella stereomallilla. H=4500 m, oletettu c=150 mm, todellinen c=150,02 mm. Polttovälin virheestä aiheutui 0,67 m korkeusvirhe suorassa georeferoinnissa. Epäsuorassa sensoriorientoinnissa virhe pääosin absorboitui ulkoisiin orientoihin, mallikoordinaatteihin aiheutuvat virheet olivat ( 0,02, -0,02, 0,01) m X-, Y- ja Z- suunnissa. Seuraavaksi lisättiin 0,01 ja 0,015 mm virheet pääpisteeseen. Tällöin rekonstruointivirheet olivat (-0,33, 0,33, -0,92) m suorassa georeferoinnissa ja (-0,03, - 0,17, -0,22) m epäsuorassa georeferoinnissa. pressurised cabin, cover glass lens in free atmosphere, constant temperature 7 C lens in free atmosphere temperature flying height 6 km 14 km 6 km 14 km 6 km 14 km wide angle -20 µm -38 µm -36 µm -58 µm -47 µm -80 µm camera f=153mm Normal angle camera f=305mm 12 µm -17 µm -33 µm -28 µm -110 µm -172 µm Kameravakion muutokset erilaisilla lentokorkeuksilla ja erilaisissa olosuhteissa. Meier 1978: The effect of Environmental Conditions on Distortion, Calibrated Focal Length and Focus of Aerial Survey Cameras, ISP Symposium, Tokyo, May GPS/IMU/kamera-järjestelmän kalibrointi Geodeettisen laitoksen Sjökullan testikentällä 1:4000 1:8000, 1: :16000, 1:31000 Geodeettisen laitoksen testikenttiä esiteltiin luennolla 2. Sjökullassa voidaan kalibrointi suorittaa mittakaavoissa 1:3000-1:4000, 1:6000-1:16000 sekä 1: : Jämsän kentällä kalibrointi voidaan suorittaa mittaakaavoissa 1: : Ylläolevissa kuvissa näytetään esimerkit 1:4000, 1:8000/1:16000 sekä 1:16000/1:31000 testikentistä. 19
 m suorassa georeferoinnissa ja (-0,03, - 0,17, -0,22) m epäsuorassa georeferoinnissa.")
20 (a) (b) Käytännön työssä voidaan käyttää myös kevyempiä blokkirakenteita. Kaksi ristikkäisitä vastakkaisiin suuntiin lennettyä kuvalinjaa (a) sallivat kalibroinnin määrityksen riittävän hyvin. Edestakaisin lennetty lentolinja (b) ei ole ideaalinen täyteen kalibrointiin, mutta sillä voidaan kalibroida esim. pelkkä boresight misalignment sekä pääpiste do dp dk Boresight parameters (mgon) _ OH-ACN OH-CGW Boresight standard deviations (mgon) sd_do sd_dp sd_dk _ OH-ACN OH-CGW Interior orientation parameters (micrometers) _ c y OH-ACN OH-CGW x0 Interior orientation standard deviations (micrometers) _ sd_c sd_x0 sd_y OH-ACN OH-CGW 2135 Tuloksia MML:n kuvauskalustolla kesällä 2002 suoritetuista systeemikalibroinneista. Kalibroitavana oli kaksi lentokonetta (OH-ACN ja OH-CGW) joissa molemmissa laajakulma- (150 mm) ja normaalikulmaoptiikka (214 mm). Kuvausmittakaavat olivat 1:4000, 1:8000 ja 1:16000, lentokorkeudet 600 m-3500 m. Kaikilla optiikoilla esiintyi merkittävä mikrometrin suuruinen korjaus y0-suunnassa. Optiikalla 7183 ilmeni merkittävä korjaus myös kameravakiossa (Honkavaara et al. 2003) Kirjallisuutta ASPRS 2004, Manual of Photogrammetry, Fifth Edition, Chapter 8.5, Calibration. s ASPRS 2004, Manual of Photogrammetry, Fifth Edition, Chapter , The Concept of Camera Self-Calibration. s
 2121 2122 2136 2119 2120 2119_2120 2124 2137 2128 2134 2129 2135 13153 7183 13026 7163 OH-ACN OH-CGW 5 4 3 2 1 0 Boresight standard deviations (mgon) sd_do")
21 Honkavaara, E., Ilves R., Jaakkola, J., Practical Results of GPS/IMU/camera System Calibration. In. Proceedings of Workshop: Theory, Technology and Realities of Inertial/GPS Sensor Orientation. Castelldefels, September 22-23, Jacobsen, Karsten, Calibration aspects in Direct Georeferencing of Frame Images. IntArchPhRS, Com.I, Denver, Vol.XXXIV Part 1, pp Salmenperä, Hannu, 1989.: Fotogrammetrisen pistetihennyksen menetelmät ja sovellutukset. Kappale 3.32, Itsekalibroiva pistetihennys. Tampere Salmenperä, Hannu, 1989.: Fotogrammetrisen pistetihennyksen menetelmät ja sovellutukset. Kappale 5.4, Kuvakoordinaattien systemaattiset virheet ja niiden korjaaminen. Tampere Maa Fotogrammetrinen kartoitus Luento-ohjelma
Luento 4: Kolmiointihavainnot
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Maa-57.260. Kameran kalibrointi. TKK/Fotogrammetria/PP
 Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Fotogrammetrian termistöä
 Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Luento 3: Kuvahavainnot
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Luento 5: Stereoskooppinen mittaaminen
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Luento Fotogrammetrian perusteet. Henrik Haggrén
 Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Luento 8: Kolmiointi AIHEITA. Kolmiointi. Maa-57.301 Fotogrammetrian yleiskurssi. Luento-ohjelma 1 2 3 4 5 6 7 8 9 10
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Luento 6: 3-D koordinaatit
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Luento 7: Fotogrammetrinen mittausprosessi
 7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
Luento 11: Stereomallin ulkoinen orientointi
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Luento 4 Georeferointi Maa Fotogrammetrian perusteet 1
 Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi
 Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 7: Kuvan ulkoinen orientointi
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Luento 2: Kuvakoordinaattien mittaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 14.9.2005) Luento 2: Kuvakoordinaattien mittaus Mitä pitäisi oppia? Muunnokset informaatiokanavassa (osin kertausta) Erotella kuvaan ja
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 14.9.2005) Luento 2: Kuvakoordinaattien mittaus Mitä pitäisi oppia? Muunnokset informaatiokanavassa (osin kertausta) Erotella kuvaan ja
FOTOGRAMMETRINEN PISTETIHENNYS
 FOTOGRAMMETRINEN PISTETIHENNYS 1. Yleistä 2. Ilmakuvaus SKM Gisair Oy Työssä määritettiin ulkoinen orientointi Sotkamon kunnan keskustan alueen ilmakuvaukselle. Ilmakuvauksen teki SKM Gisair Oy keväällä
FOTOGRAMMETRINEN PISTETIHENNYS 1. Yleistä 2. Ilmakuvaus SKM Gisair Oy Työssä määritettiin ulkoinen orientointi Sotkamon kunnan keskustan alueen ilmakuvaukselle. Ilmakuvauksen teki SKM Gisair Oy keväällä
Luento 6 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Luento 7 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Suuriformaattiset digitaaliset ilmakuvakamerat
 Maa 57.270, Fotogrammetrian, kaukokartoituksen ja kuvantulkinnan seminaari Suuriformaattiset digitaaliset ilmakuvakamerat 2007 Lauri Saarinen Sisällysluettelo 1 Johdanto...3 2 Digitaalinen ilmakuvakamera...3
Maa 57.270, Fotogrammetrian, kaukokartoituksen ja kuvantulkinnan seminaari Suuriformaattiset digitaaliset ilmakuvakamerat 2007 Lauri Saarinen Sisällysluettelo 1 Johdanto...3 2 Digitaalinen ilmakuvakamera...3
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 9 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 7 Stereokartoituskojeet. 2007 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 7 Stereokartoituskojeet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2 Fotogrammetrinen prosessi 3 Stereokartoituskoje Stereokartoituskojeessa kuvaparin stereoskooppinen tarkastelu ja tarkka
Luento 7 Stereokartoituskojeet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2 Fotogrammetrinen prosessi 3 Stereokartoituskoje Stereokartoituskojeessa kuvaparin stereoskooppinen tarkastelu ja tarkka
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry)
") Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
Maa-57.1030 Fotogrammetrian perusteet
 Maa-57.1030 Fotogrammetrian perusteet Luento 8 Kartoitussovellukset Petri Rönnholm/Henrik Haggrén Mitä fotogrammetrisella kartoituksella tuotetaan? 3D koordinaatteja kohteesta Maaston korkeusmalli Topograafiset
Maa-57.1030 Fotogrammetrian perusteet Luento 8 Kartoitussovellukset Petri Rönnholm/Henrik Haggrén Mitä fotogrammetrisella kartoituksella tuotetaan? 3D koordinaatteja kohteesta Maaston korkeusmalli Topograafiset
Teoreettisia perusteita I
 Teoreettisia perusteita I - fotogrammetrinen mittaaminen perustuu pitkälti kollineaarisuusehtoon, jossa pisteestä heijastuva valonsäde kulkee suoraan projektiokeskuksen kautta kuvatasolle - toisaalta kameran
Teoreettisia perusteita I - fotogrammetrinen mittaaminen perustuu pitkälti kollineaarisuusehtoon, jossa pisteestä heijastuva valonsäde kulkee suoraan projektiokeskuksen kautta kuvatasolle - toisaalta kameran
Luento 9. Stereokartoituskojeet
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 9. Stereokartoituskojeet AIHEITA Analogiset stereokartoituskojeet Analyyttiset stereokartoituskojeet Digitaalinen
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 9. Stereokartoituskojeet AIHEITA Analogiset stereokartoituskojeet Analyyttiset stereokartoituskojeet Digitaalinen
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA. Lauri Karppi j82095. SATE.2010 Dynaaminen kenttäteoria DIPOLIRYHMÄANTENNI.
 VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Oskari Uitto i78966 Lauri Karppi j82095 SATE.2010 Dynaaminen kenttäteoria DIPOLIRYHMÄANTENNI Sivumäärä: 14 Jätetty tarkastettavaksi: 25.02.2008 Työn
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Oskari Uitto i78966 Lauri Karppi j82095 SATE.2010 Dynaaminen kenttäteoria DIPOLIRYHMÄANTENNI Sivumäärä: 14 Jätetty tarkastettavaksi: 25.02.2008 Työn
Luento 6: Stereo- ja jonomallin muodostaminen
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Luento 2 Stereokuvan laskeminen. 2008 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Teoreettisia perusteita II
 Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Luento 13: Ympäristömallien tiedonkeruu
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 13: Ympäristömallien tiedonkeruu Luento 13: Ympäristömallien tiedonkeruu 3-D mallien tiedonkeruu Ilmakuvauksen
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 13: Ympäristömallien tiedonkeruu Luento 13: Ympäristömallien tiedonkeruu 3-D mallien tiedonkeruu Ilmakuvauksen
Luento 5: Kolmioinnin laskenta
 Maa-57.0 Fotogrammetrinen kartoitus Luento-ohjelma 1 3 4 5 6 7 8 9 10 11 1 13 Luento 5: Kolmioinnin laskenta Luento 5: Kolmioinnin laskenta Ilmakolmiointi Blokkitasoitus painotetulla PNS-menetelmällä Kolmioinnin
Maa-57.0 Fotogrammetrinen kartoitus Luento-ohjelma 1 3 4 5 6 7 8 9 10 11 1 13 Luento 5: Kolmioinnin laskenta Luento 5: Kolmioinnin laskenta Ilmakolmiointi Blokkitasoitus painotetulla PNS-menetelmällä Kolmioinnin
Luento 4: Kiertomatriisi
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 13.10.2004) Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus AIHEITA Stereomittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 13.10.2004) Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus AIHEITA Stereomittaus
S11-04 Kompaktikamerat stereokamerajärjestelmässä. Projektisuunnitelma
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Projektisuunnitelma Ari-Matti Reinsalo Anssi Niemi 28.1.2011 Projektityön tavoite Projektityössä
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Projektisuunnitelma Ari-Matti Reinsalo Anssi Niemi 28.1.2011 Projektityön tavoite Projektityössä
Mittausten suunnittelu I
 Mittausten suunnittelu I Eteenpäinleikkaukseen perustuvan mittauksen tarkkuus riippuu kahdesta asiasta (C.S. Fraser, 1996): 1) kuvaus-/tähtäyssäteen määritystarkkuudesta 2) kuvausgeometriasta Saavutettavaa
Mittausten suunnittelu I Eteenpäinleikkaukseen perustuvan mittauksen tarkkuus riippuu kahdesta asiasta (C.S. Fraser, 1996): 1) kuvaus-/tähtäyssäteen määritystarkkuudesta 2) kuvausgeometriasta Saavutettavaa
Deformoituvan metallirakenteen fotogrammetrinen muodonmuutosmittaus
 Deformoituvan metallirakenteen fotogrammetrinen muodonmuutosmittaus Diplomityö, joka on jätetty opinnäytteenä tarkastettavaksi diplomi-insinöörin tutkintoa varten. Espoo, huhtikuu 2015 Tekniikan kandidaatti
Deformoituvan metallirakenteen fotogrammetrinen muodonmuutosmittaus Diplomityö, joka on jätetty opinnäytteenä tarkastettavaksi diplomi-insinöörin tutkintoa varten. Espoo, huhtikuu 2015 Tekniikan kandidaatti
Työ 2324B 4h. VALON KULKU AINEESSA
 TURUN AMMATTIKORKEAKOULU TYÖOHJE 1/5 Työ 2324B 4h. VALON KULKU AINEESSA TYÖN TAVOITE Työssä perehdytään optisiin ilmiöihin tutkimalla valon kulkua linssisysteemeissä ja prismassa. Tavoitteena on saada
TURUN AMMATTIKORKEAKOULU TYÖOHJE 1/5 Työ 2324B 4h. VALON KULKU AINEESSA TYÖN TAVOITE Työssä perehdytään optisiin ilmiöihin tutkimalla valon kulkua linssisysteemeissä ja prismassa. Tavoitteena on saada
Ilmakolmioinnin laadunvalvonta fotogrammetristen pintamallien ja laserkeilausaineiston avulla
 Ilmakolmioinnin laadunvalvonta fotogrammetristen pintamallien ja laserkeilausaineiston avulla Aalto-yliopiston insinööritieteiden korkeakoulun maankäyttötieteiden laitoksella tehty diplomityö Espoo, toukokuu
Ilmakolmioinnin laadunvalvonta fotogrammetristen pintamallien ja laserkeilausaineiston avulla Aalto-yliopiston insinööritieteiden korkeakoulun maankäyttötieteiden laitoksella tehty diplomityö Espoo, toukokuu
Luento 2: Digitaalinen kuvatuotanto I
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 2: Digitaalinen kuvatuotanto I Luento 2: Digitaalinen kuvatuotanto I Kuvien laatu Radiometrinen laatu Spektraali
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 2: Digitaalinen kuvatuotanto I Luento 2: Digitaalinen kuvatuotanto I Kuvien laatu Radiometrinen laatu Spektraali
Luento 8: Ilmakuvaus AIHEITA. Kuvauslajit. Maa-57.300 Fotogrammetrian perusteet. Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 9.2.2003, Päivityksiä: Katri Koistinen 10.2.2004) Luento 8: Ilmakuvaus AIHEITA Kuvauslajit
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 9.2.2003, Päivityksiä: Katri Koistinen 10.2.2004) Luento 8: Ilmakuvaus AIHEITA Kuvauslajit
TTY Mittausten koekenttä. Käyttö. Sijainti
 TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
Luento 3 Kuvaus- ja mittauskalusto. erikoissovellukset
 Luento 3 Kuvaus- ja mittauskalusto 1 Aiheita Mittakamerat Digitaaliset kamerat Komparaattorit Ohjelmistot 2 Photogrammetry 1907 27 stations 111 photographs 7 geodetic control points 3 Photogrammetric documentation
Luento 3 Kuvaus- ja mittauskalusto 1 Aiheita Mittakamerat Digitaaliset kamerat Komparaattorit Ohjelmistot 2 Photogrammetry 1907 27 stations 111 photographs 7 geodetic control points 3 Photogrammetric documentation
Luento 6 Mittausten suunnittelu II. erikoissovellukset
 Luento 6 Mittausten suunnittelu II 1 Aiheita Mittausongelman määrittely Tarkkuusluvut Suhteellinen tarkkuusluku Suhteellinen tarkkuus Tarkkuuden arvioiminen Kuvahavainnon keskivirhe Verkon rakennevakio
Luento 6 Mittausten suunnittelu II 1 Aiheita Mittausongelman määrittely Tarkkuusluvut Suhteellinen tarkkuusluku Suhteellinen tarkkuus Tarkkuuden arvioiminen Kuvahavainnon keskivirhe Verkon rakennevakio
Maa-57.1030 Fotogrammetrian perusteet ILMAKUVAUS
 Maa-57.1030 Fotogrammetrian perusteet ILMAKUVAUS (Alkuperäinen luento: Henrik Haggrén 2003) (Päivitykset: Katri Koistinen 2004,Anita Laiho-Heikkinen 2007) 2008 Jussi Heikkinen, Jussi.Heikkinen@tkk.fi Ilmakuvaus
Maa-57.1030 Fotogrammetrian perusteet ILMAKUVAUS (Alkuperäinen luento: Henrik Haggrén 2003) (Päivitykset: Katri Koistinen 2004,Anita Laiho-Heikkinen 2007) 2008 Jussi Heikkinen, Jussi.Heikkinen@tkk.fi Ilmakuvaus
Fotogrammetrisen kartoituksen opintojaksot
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 1: Opintojakson sisältö ja tavoitteet (Alkuperäinen luento: Henrik Haggrén, 11.10.2002 Muutoksia: Eija Honkavaara
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 1: Opintojakson sisältö ja tavoitteet (Alkuperäinen luento: Henrik Haggrén, 11.10.2002 Muutoksia: Eija Honkavaara
Luento 10: Optinen 3-D mittaus ja laserkeilaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
MAA-C2001 Ympäristötiedon keruu
 MAA-C2001 Ympäristötiedon keruu Luento 1b Petri Rönnholm, Aalto-yliopisto 1 Laserkeilauksen, fotogrammetrian ja kaukokartoituksen harjoituksista Laserkeilausharjoitus Tarkempi aikataulu julkaistaan lähiaikoina
MAA-C2001 Ympäristötiedon keruu Luento 1b Petri Rönnholm, Aalto-yliopisto 1 Laserkeilauksen, fotogrammetrian ja kaukokartoituksen harjoituksista Laserkeilausharjoitus Tarkempi aikataulu julkaistaan lähiaikoina
Luento 3: Keskusprojektiokuvaus
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 11.3.2003, Päivityksiä: Katri Koistinen, 20.1.2004) Luento 3: Keskusprojektiokuvaus
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 11.3.2003, Päivityksiä: Katri Koistinen, 20.1.2004) Luento 3: Keskusprojektiokuvaus
x 5 15 x 25 10x 40 11x x y 36 y sijoitus jompaankumpaan yhtälöön : b)
") MAA4 ratkaisut. 5 a) Itseisarvon vastauksen pitää olla aina positiivinen, joten määritelty kun 5 0 5 5 tai ( ) 5 5 5 5 0 5 5 5 5 0 5 5 0 0 9 5 9 40 5 5 5 5 0 40 5 Jälkimmäinen vastaus ei toimi määrittelyjoukon
MAA4 ratkaisut. 5 a) Itseisarvon vastauksen pitää olla aina positiivinen, joten määritelty kun 5 0 5 5 tai ( ) 5 5 5 5 0 5 5 5 5 0 5 5 0 0 9 5 9 40 5 5 5 5 0 40 5 Jälkimmäinen vastaus ei toimi määrittelyjoukon
Geometrinen optiikka. Tasopeili. P = esinepiste P = kuvapiste
 Geometrinen optiikka Tasopeili P = esinepiste P = kuvapiste Valekuva eli virtuaalinen kuva koska säteiden jatkeet leikkaavat (vs. todellinen kuva, joka muodostuu itse säteiden leikkauspisteeseen) Tasomainen
Geometrinen optiikka Tasopeili P = esinepiste P = kuvapiste Valekuva eli virtuaalinen kuva koska säteiden jatkeet leikkaavat (vs. todellinen kuva, joka muodostuu itse säteiden leikkauspisteeseen) Tasomainen
Tampereen yliopisto Tietokonegrafiikka 2013 Tietojenkäsittelytiede Harjoitus
 Tampereen yliopisto Tietokonegrafiikka 2013 Tietojenkäsittelytiede Harjoitus 2 7.2.2013 1. Matematiikan lukiokurssissa on esitetty, että ylöspäin aukeavan paraabelin f(x) = ax 2 +bx+c,a > 0,minimikohtasaadaan,kunf
Tampereen yliopisto Tietokonegrafiikka 2013 Tietojenkäsittelytiede Harjoitus 2 7.2.2013 1. Matematiikan lukiokurssissa on esitetty, että ylöspäin aukeavan paraabelin f(x) = ax 2 +bx+c,a > 0,minimikohtasaadaan,kunf
Luento 7 Stereokartoituskojeet Maa Fotogrammetrian perusteet 1
 Luento 7 Stereokartoituskojeet 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2008 Maa-57.1030 Fotogrammetrian perusteet 2 Fotogrammetrinen prosessi 2008
Luento 7 Stereokartoituskojeet 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2008 Maa-57.1030 Fotogrammetrian perusteet 2 Fotogrammetrinen prosessi 2008
Mittaushavaintojen täsmällinen käsittelymenenetelmä
 Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
KUVANMUODOSTUMINEN INSTRUMENTIT KAUKOKARTOITUSINSTRUMENTIT
 KUVANMUODOSTUMINEN INSTRUMENTIT 1. KESKUSPROJEKTIO 2. ILMAKUVAKAMERAT o ANALOGISET o DIGITAALISET 3. KEILAIMET 4. PASSIIVINEN JA AKTIIVINEN KUVAUS 5. TUTKAT 6. LASERKEILAIMET KAUKOKARTOITUSINSTRUMENTIT
KUVANMUODOSTUMINEN INSTRUMENTIT 1. KESKUSPROJEKTIO 2. ILMAKUVAKAMERAT o ANALOGISET o DIGITAALISET 3. KEILAIMET 4. PASSIIVINEN JA AKTIIVINEN KUVAUS 5. TUTKAT 6. LASERKEILAIMET KAUKOKARTOITUSINSTRUMENTIT
Luento 13: Ympäristömallien tiedonkeruu
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 13: Ympäristömallien tiedonkeruu Luento 13: Ympäristömallien tiedonkeruu 3-D mallien tiedonkeruu Ilmakuvauksen
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 13: Ympäristömallien tiedonkeruu Luento 13: Ympäristömallien tiedonkeruu 3-D mallien tiedonkeruu Ilmakuvauksen
Havaitsevan tähtitieteen peruskurssi I, yhteenveto
 Havaitsevan tähtitieteen peruskurssi I, yhteenveto Luento 23.4.2009, T. Hackman & J. Näränen 1. Yleisesti tärkeätä Peruskäsitteet Mitä havaintomenetelmää kannatta käyttää? Minkälaista teleskooppia millekin
Havaitsevan tähtitieteen peruskurssi I, yhteenveto Luento 23.4.2009, T. Hackman & J. Näränen 1. Yleisesti tärkeätä Peruskäsitteet Mitä havaintomenetelmää kannatta käyttää? Minkälaista teleskooppia millekin
Luento 1 Fotogrammetria prosessina Maa Fotogrammetrian perusteet 1
 Luento 1 Fotogrammetria prosessina. 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Maa-57.1030 Fotogrammetrian perusteet (3 op) Sisältyy geomatiikan koulutusohjelman perusmoduuliin A1. Kurssin kuvaus Stereofotogrammetria.
Luento 1 Fotogrammetria prosessina. 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Maa-57.1030 Fotogrammetrian perusteet (3 op) Sisältyy geomatiikan koulutusohjelman perusmoduuliin A1. Kurssin kuvaus Stereofotogrammetria.
7.4 PERUSPISTEIDEN SIJAINTI
 67 7.4 PERUSPISTEIDEN SIJAINTI Optisen systeemin peruspisteet saadaan systeemimatriisista. Käytetään seuraavan kuvan merkintöjä: Kuvassa sisäänmenotaso on ensimmäisen linssin ensimmäisessä pinnassa eli
67 7.4 PERUSPISTEIDEN SIJAINTI Optisen systeemin peruspisteet saadaan systeemimatriisista. Käytetään seuraavan kuvan merkintöjä: Kuvassa sisäänmenotaso on ensimmäisen linssin ensimmäisessä pinnassa eli
 MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
Ratkaisu: Maksimivalovoiman lauseke koostuu heijastimen maksimivalovoimasta ja valonlähteestä suoraan (ilman heijastumista) tulevasta valovoimasta:
 tulevasta valovoimasta:") LASKUHARJOITUS 1 VALAISIMIEN OPTIIKKA Tehtävä 1 Pistemäinen valonlähde (Φ = 1000 lm, valokappaleen luminanssi L = 2500 kcd/m 2 ) sijoitetaan 15 cm suuruisen pyörähdysparaboloidin muotoisen peiliheijastimen
LASKUHARJOITUS 1 VALAISIMIEN OPTIIKKA Tehtävä 1 Pistemäinen valonlähde (Φ = 1000 lm, valokappaleen luminanssi L = 2500 kcd/m 2 ) sijoitetaan 15 cm suuruisen pyörähdysparaboloidin muotoisen peiliheijastimen
Havaitsevan tähtitieteen pk I, 2012
 Havaitsevan tähtitieteen pk I, 2012 Kuva: J.Näränen 2004 Luento 2, 26.1.2012: Ilmakehän vaikutus havaintoihin Luennoitsija: Thomas Hackman HTTPK I, kevät 2012, luento2 1 2. Ilmakehän vaikutus havaintoihin
Havaitsevan tähtitieteen pk I, 2012 Kuva: J.Näränen 2004 Luento 2, 26.1.2012: Ilmakehän vaikutus havaintoihin Luennoitsija: Thomas Hackman HTTPK I, kevät 2012, luento2 1 2. Ilmakehän vaikutus havaintoihin
Ratkaisu: Taittuminen ensimmäisessä pinnassa on tietysti sama kuin edellisessä esimerkissä. Säteet taittuvat ja muodostaisivat kuva 40 cm:n
 141 ------------------------------------------------Esimerkki: Paksu linssi. Edellisessä esimerkissä materiaali 2 ulottuu niin pitkälle, että kuva muodostuu sen sisälle. Miten tilanne muuttuu, jos jälkimmäinen
141 ------------------------------------------------Esimerkki: Paksu linssi. Edellisessä esimerkissä materiaali 2 ulottuu niin pitkälle, että kuva muodostuu sen sisälle. Miten tilanne muuttuu, jos jälkimmäinen
Muodonmuutostila hum 30.8.13
 Muodonmuutostila Tarkastellaan kuvan 1 kappaletta Ω, jonka pisteet siirtvät ulkoisen kuormituksen johdosta siten, että siirtmien tapahduttua ne muodostavat kappaleen Ω'. Esimerkiksi piste A siirt asemaan
Muodonmuutostila Tarkastellaan kuvan 1 kappaletta Ω, jonka pisteet siirtvät ulkoisen kuormituksen johdosta siten, että siirtmien tapahduttua ne muodostavat kappaleen Ω'. Esimerkiksi piste A siirt asemaan
Luento 5. Stereomittauksen tarkkuus Maa Fotogrammetrian perusteet 1
 Luento 5 Stereomittauksen tarkkuus 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin
Luento 5 Stereomittauksen tarkkuus 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin
Satelliittipaikannus
 Kolme maailmalaajuista järjestelmää 1. GPS (USAn puolustusministeriö) Täydessä laajuudessaan toiminnassa v. 1994. http://www.navcen.uscg.gov/gps/default.htm 2. GLONASS (Venäjän hallitus) Ilmeisesti 11
Kolme maailmalaajuista järjestelmää 1. GPS (USAn puolustusministeriö) Täydessä laajuudessaan toiminnassa v. 1994. http://www.navcen.uscg.gov/gps/default.htm 2. GLONASS (Venäjän hallitus) Ilmeisesti 11
Geodeettisen laitoksen koordinaattimuunnospalvelu
 Geodeettisen laitoksen koordinaattimuunnospalvelu Janne Kovanen Geodeettinen laitos 10.3.2010 Koordinaattimuunnospalvelusta lyhyesti Ilmainen palvelu on ollut tarjolla syksystä 2008 lähtien. Web-sovellus
Geodeettisen laitoksen koordinaattimuunnospalvelu Janne Kovanen Geodeettinen laitos 10.3.2010 Koordinaattimuunnospalvelusta lyhyesti Ilmainen palvelu on ollut tarjolla syksystä 2008 lähtien. Web-sovellus
RATKAISUT: 16. Peilit ja linssit
 Physica 9 1 painos 1(6) : 161 a) Kupera linssi on linssi, jonka on keskeltä paksumpi kuin reunoilta b) Kupera peili on peili, jossa heijastava pinta on kaarevan pinnan ulkopinnalla c) Polttopiste on piste,
Physica 9 1 painos 1(6) : 161 a) Kupera linssi on linssi, jonka on keskeltä paksumpi kuin reunoilta b) Kupera peili on peili, jossa heijastava pinta on kaarevan pinnan ulkopinnalla c) Polttopiste on piste,
Mitä kalibrointitodistus kertoo?
 Mitä kalibrointitodistus kertoo? Luotettavuutta päästökauppaan liittyviin mittauksiin MIKES 21.9.2006 Martti Heinonen Tavoite Laitteen kalibroinnista hyödytään vain jos sen tuloksia käytetään hyväksi.
Mitä kalibrointitodistus kertoo? Luotettavuutta päästökauppaan liittyviin mittauksiin MIKES 21.9.2006 Martti Heinonen Tavoite Laitteen kalibroinnista hyödytään vain jos sen tuloksia käytetään hyväksi.
Luento 6: Kolmiointi digitoiduin kuvin.
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: Kolmiointi digitoiduin kuvin. Luento 6: Kolmiointi digitoiduin kuvin. Liitospisteiden mittaus Kuvien yhteensovitus
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: Kolmiointi digitoiduin kuvin. Luento 6: Kolmiointi digitoiduin kuvin. Liitospisteiden mittaus Kuvien yhteensovitus
(Petri Rönnholm / Henrik Haggrén, ) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot.
 Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot.") Maa-57.301 Fotogrammetrian yleiskurssi (Petri Rönnholm / Henrik Haggrén, 12.9.2005) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot. Mitä pitäisi oppia? Palauttaa
Maa-57.301 Fotogrammetrian yleiskurssi (Petri Rönnholm / Henrik Haggrén, 12.9.2005) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot. Mitä pitäisi oppia? Palauttaa
SISÄLTÖ Venymän käsite Liukuman käsite Venymä ja liukuma lujuusopin sovelluksissa
 SISÄLTÖ Venymän käsite Liukuman käsite Venymä ja liukuma lujuusopin sovelluksissa 1 SISÄLTÖ 1. Siirtymä 2 1 2.1 MUODONMUUTOS Muodonmuutos (deformaatio) Tapahtuu, kun kappaleeseen vaikuttaa voima/voimia
SISÄLTÖ Venymän käsite Liukuman käsite Venymä ja liukuma lujuusopin sovelluksissa 1 SISÄLTÖ 1. Siirtymä 2 1 2.1 MUODONMUUTOS Muodonmuutos (deformaatio) Tapahtuu, kun kappaleeseen vaikuttaa voima/voimia
Havaitsevan tähtitieteen peruskurssi I. Ilmakehän vaikutus havaintoihin. Jyri Lehtinen. kevät Helsingin yliopisto, Fysiikan laitos
 Ilmakehän vaikutus havaintoihin Helsingin yliopisto, Fysiikan laitos kevät 2013 2. Ilmakehän vaikutus havaintoihin Ilmakehän transmissio (läpäisevyys) sähkömagneettisen säteilyn eri aallonpituuksilla 2.
Ilmakehän vaikutus havaintoihin Helsingin yliopisto, Fysiikan laitos kevät 2013 2. Ilmakehän vaikutus havaintoihin Ilmakehän transmissio (läpäisevyys) sähkömagneettisen säteilyn eri aallonpituuksilla 2.
Laitetekniset vaatimukset ammattimaiselle dronetoiminnalle. Sakari Mäenpää
 Laitetekniset vaatimukset ammattimaiselle dronetoiminnalle Sakari Mäenpää Lopputulokseen vaikuttavat tekijät Kalusto Olosuhteet Ammattitaito Kuvauskohde Hyvä suunnitelma = onnistunut lopputulos Olosuhteet,
Laitetekniset vaatimukset ammattimaiselle dronetoiminnalle Sakari Mäenpää Lopputulokseen vaikuttavat tekijät Kalusto Olosuhteet Ammattitaito Kuvauskohde Hyvä suunnitelma = onnistunut lopputulos Olosuhteet,
Luento 13: Mittausovellukset
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 13: Mittausovellukset AIHEITA Off-line sovelluksia On-line sovelluksia (Alkuperäinen luento: Henrik Haggrén, 11.3.2003,
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 13: Mittausovellukset AIHEITA Off-line sovelluksia On-line sovelluksia (Alkuperäinen luento: Henrik Haggrén, 11.3.2003,
Luento 6: Kolmiointi digitoiduin kuvin.
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: Kolmiointi digitoiduin kuvin. Luento 6: Kolmiointi digitoiduin kuvin. Kolmiointi digitoiduin kuvin Liitospisteiden
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: Kolmiointi digitoiduin kuvin. Luento 6: Kolmiointi digitoiduin kuvin. Kolmiointi digitoiduin kuvin Liitospisteiden
Luento 10 3-D maailma. fotogrammetriaan ja kaukokartoitukseen
 Luento 10 3-D maailma 1 Luennot 2007 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 10 3-D maailma 1 Luennot 2007 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
6 GEOMETRISTA OPTIIKKAA
 127 6 GEOMETRISTA OPTIIKKAA Näemme itsemme peilistä. Kuuta voidaan katsoa kaukoputken läpi. Nämä ovat esimerkkejä optisesta kuvan muodostumisesta. Molemmissa tapauksissa katsottava esine näyttää olevan
127 6 GEOMETRISTA OPTIIKKAA Näemme itsemme peilistä. Kuuta voidaan katsoa kaukoputken läpi. Nämä ovat esimerkkejä optisesta kuvan muodostumisesta. Molemmissa tapauksissa katsottava esine näyttää olevan
Malleja ja menetelmiä geometriseen tietokonenäköön
 Malleja ja menetelmiä geometriseen tietokonenäköön Juho Kannala 7.5.2010 Johdanto Tietokonenäkö on ala, joka kehittää menetelmiä automaattiseen kuvien sisällön tulkintaan Tietokonenäkö on ajankohtainen
Malleja ja menetelmiä geometriseen tietokonenäköön Juho Kannala 7.5.2010 Johdanto Tietokonenäkö on ala, joka kehittää menetelmiä automaattiseen kuvien sisällön tulkintaan Tietokonenäkö on ajankohtainen
Luento 11: Kartoitusprojektit
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 25.10.2002 Muutoksia: Eija Honkavaara 17.10.2004) Luento 11: Kartoitusprojektit
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 25.10.2002 Muutoksia: Eija Honkavaara 17.10.2004) Luento 11: Kartoitusprojektit
Työ 21 Valon käyttäytyminen rajapinnoilla. Työvuoro 40 pari 1
 Työ 21 Valon käyttäytyminen rajapinnoilla Työvuoro 40 pari 1 Tero Marttila Joel Pirttimaa TLT 78949E EST 78997S Selostuksen laati Tero Marttila Mittaukset suoritettu 12.11.2012 Selostus palautettu 19.11.2012
Työ 21 Valon käyttäytyminen rajapinnoilla Työvuoro 40 pari 1 Tero Marttila Joel Pirttimaa TLT 78949E EST 78997S Selostuksen laati Tero Marttila Mittaukset suoritettu 12.11.2012 Selostus palautettu 19.11.2012
Tekijä Pitkä matematiikka Pisteen (x, y) etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.
 etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.") Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
Havaitsevan tähtitieteen peruskurssi I, kevät Luento 2, : Ilmakehän vaikutus havaintoihin Luennoitsija: Jyri Näränen
 Havaitsevan tähtitieteen peruskurssi I, kevät 2008 Luento 2, 24.1.2007: Ilmakehän vaikutus havaintoihin Luennoitsija: Jyri Näränen 1 2. Ilmakehän vaikutus havaintoihin Optinen ikkuna Radioikkuna Ilmakehän
Havaitsevan tähtitieteen peruskurssi I, kevät 2008 Luento 2, 24.1.2007: Ilmakehän vaikutus havaintoihin Luennoitsija: Jyri Näränen 1 2. Ilmakehän vaikutus havaintoihin Optinen ikkuna Radioikkuna Ilmakehän
FYSIIKAN LABORATORIOTYÖT 2 MAGNEETTIKENTTÄTYÖ
 FYSIIKAN LABORATORIOTYÖT 2 MAGNEETTIKENTTÄTYÖ MIKKO LAINE 2. kesäkuuta 2015 1. Johdanto Tässä työssä määritämme Maan magneettikentän komponentit, laskemme totaalikentän voimakkuuden ja monitoroimme magnetometrin
FYSIIKAN LABORATORIOTYÖT 2 MAGNEETTIKENTTÄTYÖ MIKKO LAINE 2. kesäkuuta 2015 1. Johdanto Tässä työssä määritämme Maan magneettikentän komponentit, laskemme totaalikentän voimakkuuden ja monitoroimme magnetometrin
FYSIIKAN LABORATORIOTYÖT 2 HILA JA PRISMA
 FYSIIKAN LABORATORIOTYÖT HILA JA PRISMA MIKKO LAINE 9. toukokuuta 05. Johdanto Tässä työssä muodostamme lasiprisman dispersiokäyrän ja määritämme työn tekijän silmän herkkyysrajan punaiselle valolle. Lisäksi
FYSIIKAN LABORATORIOTYÖT HILA JA PRISMA MIKKO LAINE 9. toukokuuta 05. Johdanto Tässä työssä muodostamme lasiprisman dispersiokäyrän ja määritämme työn tekijän silmän herkkyysrajan punaiselle valolle. Lisäksi
Geometriaa kuvauksin. Siirto eli translaatio
 Geometriaa kuvauksin Siirto eli translaatio Janan AB kuva on jana A B ja ABB A on suunnikas. Suora kuvautuu itsensä kanssa yhdensuuntaiseksi suoraksi. Kulmat säilyvät. Kuva ja alkukuva ovat yhtenevät.
Geometriaa kuvauksin Siirto eli translaatio Janan AB kuva on jana A B ja ABB A on suunnikas. Suora kuvautuu itsensä kanssa yhdensuuntaiseksi suoraksi. Kulmat säilyvät. Kuva ja alkukuva ovat yhtenevät.
Vanhoja koetehtäviä. Analyyttinen geometria 2016
 Vanhoja koetehtäviä Analyyttinen geometria 016 1. Määritä luvun a arvo, kun piste (,3) on käyrällä a(3x + a) = (y - 1). Suora L kulkee pisteen (5,1) kautta ja on kohtisuorassa suoraa 6x + 7y - 19 = 0 vastaan.
Vanhoja koetehtäviä Analyyttinen geometria 016 1. Määritä luvun a arvo, kun piste (,3) on käyrällä a(3x + a) = (y - 1). Suora L kulkee pisteen (5,1) kautta ja on kohtisuorassa suoraa 6x + 7y - 19 = 0 vastaan.
KIINTOPISTEMITTAUKSET MML:ssa
 KIINTOPISTEMITTAUKSET MML:ssa ESITYKSEN SISÄLTÖ: Koordinaattijärjestelmän uudistus (EUREF-FIN) Korkeusjärjestelmän uudistus (N2000) MML:n tasokiintopistemittaukset MML:n korkeuskiintopistemittaukset Mittaukset
KIINTOPISTEMITTAUKSET MML:ssa ESITYKSEN SISÄLTÖ: Koordinaattijärjestelmän uudistus (EUREF-FIN) Korkeusjärjestelmän uudistus (N2000) MML:n tasokiintopistemittaukset MML:n korkeuskiintopistemittaukset Mittaukset
AKKREDITOITU KALIBROINTILABORATORIO ACCREDITED CALIBRATION LABORATORY
 K022/A15/2015 Liite 1 / Appendix 1 Sivu / Page 1(6) AKKREDITOITU KALIBROINTILABORATORIO ACCREDITED CALIBRATION LABORATORY JYVÄSKYLÄN AMMATTIKORKEAKOULU TEKNOLOGIA KALIBROINTIKESKUS K022 (EN ISO/IEC 17025)
K022/A15/2015 Liite 1 / Appendix 1 Sivu / Page 1(6) AKKREDITOITU KALIBROINTILABORATORIO ACCREDITED CALIBRATION LABORATORY JYVÄSKYLÄN AMMATTIKORKEAKOULU TEKNOLOGIA KALIBROINTIKESKUS K022 (EN ISO/IEC 17025)
KESTOMAGNEETTI VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA. Jani Vitikka p87434 Hannu Tiitinen p87432. Dynaaminen kenttäteoria SATE2010
 VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Jani Vitikka p87434 Hannu Tiitinen p87432 Dynaaminen kenttäteoria SATE2010 KESTOMAGNEETTI Sivumäärä: 10 Jätetty tarkastettavaksi: 16.1.2008 Työn tarkastaja
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Jani Vitikka p87434 Hannu Tiitinen p87432 Dynaaminen kenttäteoria SATE2010 KESTOMAGNEETTI Sivumäärä: 10 Jätetty tarkastettavaksi: 16.1.2008 Työn tarkastaja
JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit
 JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit Versio: 1.0 Julkaistu: 6.9.2019 Voimassaoloaika: toistaiseksi 1 FIN2005N00 1.1 Mallin luonti ja tarkkuus FIN2005N00 on korkeusmuunnospinta,
JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit Versio: 1.0 Julkaistu: 6.9.2019 Voimassaoloaika: toistaiseksi 1 FIN2005N00 1.1 Mallin luonti ja tarkkuus FIN2005N00 on korkeusmuunnospinta,
DIGITAALINEN ILMAKUVAUS JA SEN MAHDOLLISUUDET. Eija Honkavaara, Lauri Markelin, Kimmo Nurminen
 The Photogrammetric Journal of Finland, Vol. 22, No. 3, 2011 DIGITAALINEN ILMAKUVAUS JA SEN MAHDOLLISUUDET Eija Honkavaara, Lauri Markelin, Kimmo Nurminen Geodeettinen laitos, Kaukokartoituksen ja fotogrammetrian
The Photogrammetric Journal of Finland, Vol. 22, No. 3, 2011 DIGITAALINEN ILMAKUVAUS JA SEN MAHDOLLISUUDET Eija Honkavaara, Lauri Markelin, Kimmo Nurminen Geodeettinen laitos, Kaukokartoituksen ja fotogrammetrian
Pidisjärven tulvavaarakartat HW1/20 HW1/1000
 POHJOIS-POHJANMAAN YMPÄRISTÖKESKUS Pidisjärven tulvavaarakartat HW1/20 HW1/1000 30.04.2007 Insinööritoimisto Pekka Leiviskä Vauhtipyörä 4, 91800 Tyrnävä www.leiviska.fi 2 SISÄLLYSLUETTELO 1 YLEISTÄ...3
POHJOIS-POHJANMAAN YMPÄRISTÖKESKUS Pidisjärven tulvavaarakartat HW1/20 HW1/1000 30.04.2007 Insinööritoimisto Pekka Leiviskä Vauhtipyörä 4, 91800 Tyrnävä www.leiviska.fi 2 SISÄLLYSLUETTELO 1 YLEISTÄ...3
EUREF ja GPS. Matti Ollikainen Geodeettinen laitos. EUREF-päivä 29.1.2004 Teknillinen korkeakoulu Espoo
 EUREF ja GPS Matti Ollikainen Geodeettinen laitos EUREF-päivä 29.1.2004 Teknillinen korkeakoulu Espoo Kuinka EUREF sai alkunsa? EUREF (European Reference Frame) o Perustettiin Kansainvälisen geodeettisen
EUREF ja GPS Matti Ollikainen Geodeettinen laitos EUREF-päivä 29.1.2004 Teknillinen korkeakoulu Espoo Kuinka EUREF sai alkunsa? EUREF (European Reference Frame) o Perustettiin Kansainvälisen geodeettisen
DIODIN OMINAISKÄYRÄ TRANSISTORIN OMINAISKÄYRÄSTÖ
 1 IOIN OMINAISKÄYRÄ JA TRANSISTORIN OMINAISKÄYRÄSTÖ MOTIVOINTI Työ opettaa mittaamaan erityyppisten diodien ominaiskäyrät käyttämällä oskilloskooppia XYpiirturina Työssä opetellaan mittaamaan transistorin
1 IOIN OMINAISKÄYRÄ JA TRANSISTORIN OMINAISKÄYRÄSTÖ MOTIVOINTI Työ opettaa mittaamaan erityyppisten diodien ominaiskäyrät käyttämällä oskilloskooppia XYpiirturina Työssä opetellaan mittaamaan transistorin
Uuden valtakunnallisen laserkeilaukseen perustuvan korkeusmallituotannon käynnistäminen Maanmittauslaitoksessa
 28 Uuden valtakunnallisen laserkeilaukseen perustuvan korkeusmallituotannon Maanmittaus 85:2 (2010) Tietoisku Uuden valtakunnallisen laserkeilaukseen perustuvan korkeusmallituotannon käynnistäminen Maanmittauslaitoksessa
28 Uuden valtakunnallisen laserkeilaukseen perustuvan korkeusmallituotannon Maanmittaus 85:2 (2010) Tietoisku Uuden valtakunnallisen laserkeilaukseen perustuvan korkeusmallituotannon käynnistäminen Maanmittauslaitoksessa
y=-3x+2 y=2x-3 y=3x+2 x = = 6
 MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
Valokuvauksen opintopiiri
 Valokuvauksen opintopiiri Valokuvaus on maalaamista valolla kameraa käyttäen. (tuntematon ajattelija) Valokuvaus on menetelmä, jossa valokuvia talletetaan valoherkälle materiaalille kameran avulla. Perinteisessä
Valokuvauksen opintopiiri Valokuvaus on maalaamista valolla kameraa käyttäen. (tuntematon ajattelija) Valokuvaus on menetelmä, jossa valokuvia talletetaan valoherkälle materiaalille kameran avulla. Perinteisessä