Luento 11: Stereomallin ulkoinen orientointi
|
|
|
- Heidi Heino
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
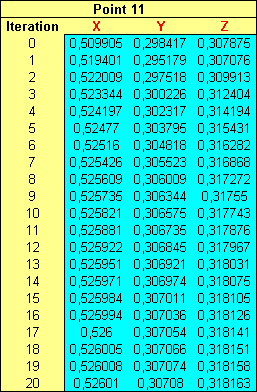
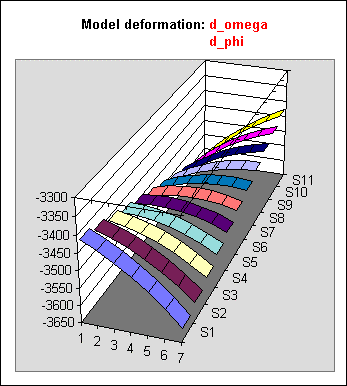
1 Maa Fotogrammetrian perusteet Luento-ohjelma (Alkuperäinen luento: Henrik Haggrén, , Päivityksiä: Katri Koistinen, ) Luento 11: Stereomallin ulkoinen orientointi AIHEITA Tukipisteet Ulkoinen orientointi analogiakojeilla Mallideformaatiot Kuvapari voidaan aina orientoida stereomalliksi, jossa sitä tulkitaan ja mitataan omassa 3-D koordinaatistossaan. Käytännössä havainnot muunnetaan myös kohteen kartoituskoordinaatistoon. Mallija kohdekoordinaatiston välinen muunnos ratkaistaan ulkoisella orientoinnilla. Muunnos on useimmiten kohtisuora yhdenmuotoismuunnos ja sisältää seitsemän muuttujaa eli mittakaavan korjauksen, kolme siirtoa ja kolme kiertoa. Näitä ei voi havaita suoraan vaan ainoastaan välillisesti muunnospisteiden avulla. Muunnoksen edellytyksenä on, että stereomallilta on havaittu vähintään kolme sellaista pistettä, joiden koordinaatit tunnetaan myös kohdekoordinaatistossa. Käytännössä muunnospisteitä eli n.s. tukipisteitä on enemmän. Joissakin erikoistapauksissa mallikoordinaatisto on vino. Tällöin muunnos tehdään projektiivisesti ja muunnoksessa on 15 muuttujaa, kolme mittakaavaa, kolme siirtoa ja 3x3 kiertoa. Stereomallin ulkoisessa orientoinnissa on aina tärkeää, että muunnokseen voidaan käyttää enemmän tukipisteitä kuin edellä mainitut kolme. Tukipisteitä saadaan sekä kohteella tehdyin mittauksin että fotogrammetrisesti kolmioimalla. Kolmioinnissa mallit ja kuvat orientoidaan ensin toisiinsa kuvablokiksi ja kuvablokki muunnetaan kohdekoordinaatistoon (blokkikolmiointi). Pelkät kohteella mitatut tukipisteet tulevat kysymykseen lähinnä silloin, kun on kyse yksittäisen stereomallin orientoimisesta. Koska kohteen yksityiskohtainen kartoitus perustuu viime kädessä stereomallin tulkintaan ja siitä tehtyihin mittauksiin, on tärkeää, että malli on oikean muotoinen. Vaikka sisäinen ja keskinäinen orientointi tehdään tarkasti, jokainen stereomalli deformoituu orientointien jäännösvirheistä. Ulkoisen orientoinnin toisena tehtävänä onkin - koordinaatistomuunnoksen lisäksi - antaa käsitys tämän deformaation suuruudesta. Mallideformaatioiden luonnetta tarkastellaan virheitä simuloimalla. Osa virheistä on lineaarisia, ja ne kompensoituvat ulkoisen orientoinnin aikana. Osa virheistä on epälineaarisia, ja niiden vaikutusta hallitaan sijoittamalla ylimääräisiä tukipisteitä virheiden kannalta kriittisille stereomallin alueille. Stereomallin keskinäinen ja ulkoinen orientointi voidaan korvata kummallekin kuvalle erikseen tehdyllä yhden kuvan ulkoisella orientoinnilla (Fotogrammetrian yleiskurssi). absoluuttinen_orientointi_analoginen_iteroiden.xls
2 Mittakaavan määritys ja XY-kohdekoordinaatiston orientaatio. Stereomallin tasaus ja Z-koordinaattiakselin orientaatio.
3 Stereomallin laskennollinen absoluuttinen orientointi. 3D koordinaatistomuunnos. Virheyhtälöt. Virheyhtälökertoimien differentiointi.

4 Mittakaavan likiarvot. Kiertomatriisin likiarvot. Kiertomatriisin differentiointi. Virheyhtälöt iterointia varten.
5 Koordinaattimuunnos.
6 Tukipisteet Stereomallin ulkoisen orientoinnin tukipisteet valitaan mallin nurkista ja kuvan keskeltä. Tukipisteet toimivat myös mallien välisinä liitospisteinä. Tukipisteinä käytetään yleisesti keskinäisen orientoinnin ns. Gruberin pisteitä. Ne riittävät mallin mittakaavan määrittämiseen ja nivellointiin. Mikäli tukipisteillä kontrolloidaan mallideformaatioita, niitä tulee sijoittaa myös mallin keskelle. Ulkoinen orientointi analogiakojeilla Stereomallin ulkoista orientointia kutsutaan myös absoluuttiseksi orientoinniksi. Stereokartoituskojeilla ulkoinen orientointi jaetaan kahteen osaan, mittakaavan määrittämiseen ja nivellointiin. Ulkoinen orientointi edellyttää sitä, että mallilla on havaittavissa vähintään kolme tukipistettä.
7 Mittakaavan määrittäminen. Stereomallin mittakaava määritetään mittaamalla kojeella kahden tunnetun pisteen välinen etäisyys. Kun näitä etäisyyksiä verrataan toisiinsa, saadaan suhdeluku, jolla kuvakantaa on korjattava. Korjaus on lineaarinen, eikä vaikuta keskinäiseen orientointiin, mikäli se tehdään b_x:n suunnassa. (Miksi?) Nivellointi. Stereomallin nivelloinnilla mallikoordinaatisto tasataan eli kallistetaan vaakatasoon. Tämä edellyttää sitä, että mallilta havaitaan vähintään kolmen pisteen korkeudet ja X- ja Y- koordinaatit. Kojeessa tasaus tehdään kallistamalla projektoreita sekä yhteisen Y-akselin ympäri (PHI-kierto) että X-akselin ympäri (OMEGA-kierto). Yhteiset kierrot eivät vaikuta keskinäiseen orientointiin. Mallideformaatiot Stereomallin virheet aiheutuvat o sisäisen orientoinnin kuvavirheistä, o keskinäisen orientoinnin epätarkkuudesta, o kojevirheistä, ja o laskentaan käytetyn fysikaalisen mallin virheistä. Mittaustilanne ei vastaa kuvaustilannetta niinkuin on tarkoitus. Virhe näkyy kohteen deformoitumisena, mikä paljastuu stereomallin jäännösvirheinä mallin ulkoisen orientoinnin aikana. Jos koje- ja kuvavirheet tunnetaan, deformaatio voidaan kompensoida laskennallisesti. Analogiakojeilla virheet 'tasoitetaan' tukipisteille sekä keskinäistä että ulkoista orientointia 'justeeraamalla', kunnes malli on hyvä havaita ja mitata. o Vaikka keskinäinen orientointi tehdään tarkasti, pystyparallaksia ei kyetä poistamaan kokonaan. Orientointisuureiden jäännösvirheet jäävät vaikuttamaan stereomalliin ja vääristävät vaakaparallaksihavaintoja. o Stereomallin muotoon vaikuttavat kuvavirheet johtuvat osin sisäisen orientoinnin epätarkkuudesta (kameravakio ja pääpiste), osin kameraoptiikan piirtovirheistä. Kun kamera on kalibroitu (mittakamera), virheet korjataan suoraan kuvahavainnoista. Mikäli mittauksiin käytetään kalibroimatonta kameraa, virheet voidaan kompensoida ulkoisella orientoinnilla, mutta tämän tulee perustua tarkkoihin, hyvin näkyvöitettyihin tukipisteisiin (itsekalibrointi).
8 o o Kojevirheiden merkitys on vähentynyt, koska pääosa havaintojen käsittelystä on laskemista. Kojevirheiden vaikutusta kompensoidaan kalibroimalla ne työvaiheet, joissa havaintoja käsitellään analogisina. Nykyisin tämä pelkistyy filmin käsittelyyn ja digitoimiseen. Laskennallisessa eli analyyttisessä fotogrammetriassakaan mallideformaatioita ei voi kokonaan unohtaa, koska deformaatioita aiheutuu myös havaintojen 'väärästä' käsittelystä. Tämän vuoksi on tärkeää, että laskemiseen käytettävät funktiot kuvaavat mahdollisimman hyvin keskusprojektiokuvauksen fysikaalista luonnetta (sädekimppumalli). Mallideformaation voi ymmärtää myös siten, että orientoimalla rekonstruoidun stereomallin koordinaatisto ei olekaan tarkasti ottaen karteesinen vaan käyräviivainen. Niiden orientointiliikkeiden jäännösvirheet, joiden vaikutus on koordinaattien suhteen lineaarista, kompensoituvat koordinaatistoa siirtämällä, kallistamalla tai yksittäisen koordinaattiakselin suuntaa tai mittakaavaa muuttamalla (X-, Y- ja Z-liike, kappa-kierto, sisäinen orientointi). Hankalimmillaan deformaatio on epälineaarista ja johtaa koordinaatiston akselien kaareutumiseen (fii- ja omegakallistukset, kameraoptiikan piirtovirheet). Excel-sovellus o Mallideformaatio mallideformaatio.zip Parallaksikaavoissa käytettiin mallikoordionaattien laskemiseen kuvahavaintojen lisäksi kuvakantaa B ja kameravakiota c. Virhe kameravakion c arvossa vääristää mallin muodon. Näissä kahdessa kuvassa on orientoitu sama kuvapari, mutta oikeanpuoleisessa kuvaparissa on käytetty kaksinkertaista kameravakiota. Neliö venyy kuvaussuunnassa eli Z-koordinaatin suunnassa kaksinkertaiseksi, kun puolestan mallin X- ja Y-koordinaatit säilyvät oikeina. Deformaatio on lineaarinen ja tässä sitä kutsutaan affiiniseksi eli venyneeksi. Tämä deformaatio voidaan kompensoida ulkoisen orientoinnin yhteydessä käyttämällä Z-koordinaattien rekisteröinnissä eri mittakaavaa kuin X- ja Y- koordinaateissa.
9 Virhe kuvakannan B arvossa ei vääristä mallin muotoa, mutta vaikuttaa suoraan sen kokoon. Tässä kuvassa sama kuvapari on orientoitu kahdesti, mutta oikeanpuoleisessa kuvaparissa on käytetty kaksinkertaista kuvakantaa. Neliö venyy joka suuntaan kaksinkertaiseksi. "Virhe" kompensoidaan ulkoisessa orientoinnissa mallin mittakaavaa korjaamalla. Jäännösparallaksi dp x voidaan johtaa näistä havainnoista keskinäisen orientoinnin yhteydessä esitellyillä projektiokaavoilla. Jäännösparallaksi vääristää mallin Z-koordinaatin ja sen myötä myös X- ja Y-koordinaatit. Tätä ilmiötä kutsutaan stereomallin deformoitumiseksi. Käytännön tilanteissa vääristymää ei voi nähdä ja orientointi on tarkistettava mittauksin. Tarkistusmittaukset sisältyvät stereomallin ulkoiseen orientointiin. Deformaation luonnetta voi havainnollistaa tasomaisella kohteella. Tarkastellaan jäännösparallaksin vaikutusta projektiotasolla ja valitaan tasoksi z = -c. Jäännösparallaksin vaikutus z-koordinaattiin lasketaan etäisyydenmittauksen epätarkkuutena dz.

10 Keskinäisen orientoinnin jäännösvirheiden vaikutus mallilta havaittuihin korkeuslukuihin eli z- koordinaatteihin.
11
12
13 Mallideformaatiot voidaan havainnollistaa myös korostetuin orientointiliikkein. Vaakaparallaksin muutos projektiotasolla näkyy vastinvalonsäteiden leikkauspisteen liikkeenä projektiotasoon nähden. Kun vaakaparallaksi muuttuu mallin kaikissa pisteissä yhtä paljon (X-liike), malli nousee tai laskee, mutta mallin muoto ei muutu. Kun vaakaparallaksi muuttuu mallin eri osissa eri tavoin, mallin pinta kaartuu (poikittais- ja pituuskallistus). Z-liike ja kuvan kiertäminen Z-akselin ympäri kallistaa mallia. Y-liike ei aiheuta mallideformatioita, mutta särkee keskinäisen orientoinnin, koska se aiheuttaa jokaiseen pisteeseen vastaavan pystyparallaksin eivätkä vastinvalonsäteet enään leikkaa toisiaan. Maa Fotogrammetrian perusteet
Luento 5. Stereomittauksen tarkkuus Maa Fotogrammetrian perusteet 1
 Luento 5 Stereomittauksen tarkkuus 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin
Luento 5 Stereomittauksen tarkkuus 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin
Luento 4 Georeferointi Maa Fotogrammetrian perusteet 1
 Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi
 Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 6: Stereo- ja jonomallin muodostaminen
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Luento 3: Kuvahavainnot
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Luento 6: 3-D koordinaatit
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Luento 7: Fotogrammetrinen mittausprosessi
 7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
Luento 8: Kolmiointi AIHEITA. Kolmiointi. Maa-57.301 Fotogrammetrian yleiskurssi. Luento-ohjelma 1 2 3 4 5 6 7 8 9 10
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Luento 4: Kiertomatriisi
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Luento 7 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 7: Kuvan ulkoinen orientointi
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Luento 5: Stereoskooppinen mittaaminen
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Luento 9 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 2: Kuvakoordinaattien mittaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 14.9.2005) Luento 2: Kuvakoordinaattien mittaus Mitä pitäisi oppia? Muunnokset informaatiokanavassa (osin kertausta) Erotella kuvaan ja
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 14.9.2005) Luento 2: Kuvakoordinaattien mittaus Mitä pitäisi oppia? Muunnokset informaatiokanavassa (osin kertausta) Erotella kuvaan ja
Teoreettisia perusteita II
 Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Fotogrammetrian termistöä
 Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Luento 7 Stereokartoituskojeet. 2007 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 7 Stereokartoituskojeet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2 Fotogrammetrinen prosessi 3 Stereokartoituskoje Stereokartoituskojeessa kuvaparin stereoskooppinen tarkastelu ja tarkka
Luento 7 Stereokartoituskojeet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2 Fotogrammetrinen prosessi 3 Stereokartoituskoje Stereokartoituskojeessa kuvaparin stereoskooppinen tarkastelu ja tarkka
Luento 2 Stereokuvan laskeminen. 2008 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 13.10.2004) Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus AIHEITA Stereomittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 13.10.2004) Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus AIHEITA Stereomittaus
Luento 7 Stereokartoituskojeet Maa Fotogrammetrian perusteet 1
 Luento 7 Stereokartoituskojeet 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2008 Maa-57.1030 Fotogrammetrian perusteet 2 Fotogrammetrinen prosessi 2008
Luento 7 Stereokartoituskojeet 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2008 Maa-57.1030 Fotogrammetrian perusteet 2 Fotogrammetrinen prosessi 2008
Luento 9. Stereokartoituskojeet
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 9. Stereokartoituskojeet AIHEITA Analogiset stereokartoituskojeet Analyyttiset stereokartoituskojeet Digitaalinen
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 9. Stereokartoituskojeet AIHEITA Analogiset stereokartoituskojeet Analyyttiset stereokartoituskojeet Digitaalinen
Maa-57.1030 Fotogrammetrian perusteet
 Maa-57.1030 Fotogrammetrian perusteet Luento 8 Kartoitussovellukset Petri Rönnholm/Henrik Haggrén Mitä fotogrammetrisella kartoituksella tuotetaan? 3D koordinaatteja kohteesta Maaston korkeusmalli Topograafiset
Maa-57.1030 Fotogrammetrian perusteet Luento 8 Kartoitussovellukset Petri Rönnholm/Henrik Haggrén Mitä fotogrammetrisella kartoituksella tuotetaan? 3D koordinaatteja kohteesta Maaston korkeusmalli Topograafiset
Luento Fotogrammetrian perusteet. Henrik Haggrén
 Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Maa-57.260. Kameran kalibrointi. TKK/Fotogrammetria/PP
 Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Aki Taanila YHDEN SELITTÄJÄN REGRESSIO
 Aki Taanila YHDEN SELITTÄJÄN REGRESSIO 26.4.2011 SISÄLLYS JOHDANTO... 1 LINEAARINEN MALLI... 1 Selityskerroin... 3 Excelin funktioita... 4 EKSPONENTIAALINEN MALLI... 4 MALLIN KÄYTTÄMINEN ENNUSTAMISEEN...
Aki Taanila YHDEN SELITTÄJÄN REGRESSIO 26.4.2011 SISÄLLYS JOHDANTO... 1 LINEAARINEN MALLI... 1 Selityskerroin... 3 Excelin funktioita... 4 EKSPONENTIAALINEN MALLI... 4 MALLIN KÄYTTÄMINEN ENNUSTAMISEEN...
Mittaushavaintojen täsmällinen käsittelymenenetelmä
 Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
(Petri Rönnholm / Henrik Haggrén, ) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot.
 Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot.") Maa-57.301 Fotogrammetrian yleiskurssi (Petri Rönnholm / Henrik Haggrén, 12.9.2005) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot. Mitä pitäisi oppia? Palauttaa
Maa-57.301 Fotogrammetrian yleiskurssi (Petri Rönnholm / Henrik Haggrén, 12.9.2005) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot. Mitä pitäisi oppia? Palauttaa
Tekijä Pitkä matematiikka
 K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta
 Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Luento 10 3-D maailma. fotogrammetriaan ja kaukokartoitukseen
 Luento 10 3-D maailma 1 Luennot 2007 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 10 3-D maailma 1 Luennot 2007 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
EUREF-FIN/N2000 käyttöönotto Helsingissä
 EUREF-FIN/N2000 käyttöönotto Helsingissä http://www.hel.fi/hki/kv/fi/kaupunkimittausosasto/kartat+ja+paikkatiedot/koordinaatisto Muutokset Helsngissä: Korkeusjärjestelmä: Tasokoordinaatisto: Pohjoiskoordinaatti
EUREF-FIN/N2000 käyttöönotto Helsingissä http://www.hel.fi/hki/kv/fi/kaupunkimittausosasto/kartat+ja+paikkatiedot/koordinaatisto Muutokset Helsngissä: Korkeusjärjestelmä: Tasokoordinaatisto: Pohjoiskoordinaatti
Muodonmuutostila hum 30.8.13
 Muodonmuutostila Tarkastellaan kuvan 1 kappaletta Ω, jonka pisteet siirtvät ulkoisen kuormituksen johdosta siten, että siirtmien tapahduttua ne muodostavat kappaleen Ω'. Esimerkiksi piste A siirt asemaan
Muodonmuutostila Tarkastellaan kuvan 1 kappaletta Ω, jonka pisteet siirtvät ulkoisen kuormituksen johdosta siten, että siirtmien tapahduttua ne muodostavat kappaleen Ω'. Esimerkiksi piste A siirt asemaan
Radiotekniikan sovelluksia
 Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
JUHTA - Julkisen hallinnon tietohallinnon neuvottelukunta
 JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 6: EUREF-FIN:n ja KKJ:n välinen kolmiulotteinen yhdenmuotoisuusmuunnos ja sen tarkkuus Versio: 1.0 / 3.2.2016
JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 6: EUREF-FIN:n ja KKJ:n välinen kolmiulotteinen yhdenmuotoisuusmuunnos ja sen tarkkuus Versio: 1.0 / 3.2.2016
MAB3 - Harjoitustehtävien ratkaisut:
 MAB3 - Harjoitustehtävien ratkaisut: 1 Funktio 1.1 Piirretään koordinaatistoakselit ja sijoitetaan pisteet: 1 1. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä.
MAB3 - Harjoitustehtävien ratkaisut: 1 Funktio 1.1 Piirretään koordinaatistoakselit ja sijoitetaan pisteet: 1 1. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä.
origo III neljännes D
 Sijoita pisteet A(1,4) ja B(4,5;5) sekä C(-3,4) ja D(-4,--5) y II neljännes C A I neljännes B x origo III neljännes D IV neljännes KOTIT. Sijoita ja nimeä koordinaatistoon pisteitä niin, että pisteet yhdistettäessä
Sijoita pisteet A(1,4) ja B(4,5;5) sekä C(-3,4) ja D(-4,--5) y II neljännes C A I neljännes B x origo III neljännes D IV neljännes KOTIT. Sijoita ja nimeä koordinaatistoon pisteitä niin, että pisteet yhdistettäessä
Kaikkiin tehtäviin ratkaisujen välivaiheet näkyviin! Lue tehtävänannot huolellisesti. Tee pisteytysruudukko B-osion konseptin yläreunaan!
 MAA4 koe 1.4.2016 Kaikkiin tehtäviin ratkaisujen välivaiheet näkyviin! Lue tehtävänannot huolellisesti. Tee pisteytysruudukko B-osion konseptin yläreunaan! Jussi Tyni A-osio: Ilman laskinta. Laske kaikki
MAA4 koe 1.4.2016 Kaikkiin tehtäviin ratkaisujen välivaiheet näkyviin! Lue tehtävänannot huolellisesti. Tee pisteytysruudukko B-osion konseptin yläreunaan! Jussi Tyni A-osio: Ilman laskinta. Laske kaikki
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry)
") Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
normaali- ja leikkaus jännitysten laskemiseen pisteessä Määritetään ne tasot, joista suurimmat normaali- ja leikkausjännitykset löytyvät
 TAVOITTEET Johdetaan htälöt, joilla muutetaan jännitskomponentit koordinaatistosta toiseen Kätetään muunnoshtälöitä suurimpien normaali- ja leikkaus jännitsten laskemiseen pisteessä Määritetään ne tasot,
TAVOITTEET Johdetaan htälöt, joilla muutetaan jännitskomponentit koordinaatistosta toiseen Kätetään muunnoshtälöitä suurimpien normaali- ja leikkaus jännitsten laskemiseen pisteessä Määritetään ne tasot,
y=-3x+2 y=2x-3 y=3x+2 x = = 6
 MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
n. asteen polynomilla on enintään n nollakohtaa ja enintään n - 1 ääriarvokohtaa.
 MAA 12 kertaus Funktion kuvaaja n. asteen polynomilla on enintään n nollakohtaa ja enintään n - 1 ääriarvokohtaa. Funktion nollakohta on piste, jossa f () = 0, eli kuvaaja leikkaa -akselin. Kuvaajan avulla
MAA 12 kertaus Funktion kuvaaja n. asteen polynomilla on enintään n nollakohtaa ja enintään n - 1 ääriarvokohtaa. Funktion nollakohta on piste, jossa f () = 0, eli kuvaaja leikkaa -akselin. Kuvaajan avulla
MAB3 - Harjoitustehtävien ratkaisut:
 MAB - Harjoitustehtävien ratkaisut: Funktio. Piirretään koordinaatistoakselit ja sijoitetaan pisteet:. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä. Funktiolla
MAB - Harjoitustehtävien ratkaisut: Funktio. Piirretään koordinaatistoakselit ja sijoitetaan pisteet:. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä. Funktiolla
Ohjeita fysiikan ylioppilaskirjoituksiin
 Ohjeita fysiikan ylioppilaskirjoituksiin Kari Eloranta 2016 Jyväskylän Lyseon lukio 11. tammikuuta 2016 Kokeen rakenne Fysiikan kokeessa on 13 tehtävää, joista vastataan kahdeksaan. Tehtävät 12 ja 13 ovat
Ohjeita fysiikan ylioppilaskirjoituksiin Kari Eloranta 2016 Jyväskylän Lyseon lukio 11. tammikuuta 2016 Kokeen rakenne Fysiikan kokeessa on 13 tehtävää, joista vastataan kahdeksaan. Tehtävät 12 ja 13 ovat
Tekijä Pitkä matematiikka Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4).
, ( 2,1), (1, 0), (4, 1) ja ( 11, 4).") Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Muutoksen arviointi differentiaalin avulla
 Muutoksen arviointi differentiaalin avulla y y = f (x) y = f (x + x) f (x) dy y dy = f (x) x x x x x + x Luento 7 1 of 15 Matematiikan ja tilastotieteen laitos Turun yliopisto Muutoksen arviointi differentiaalin
Muutoksen arviointi differentiaalin avulla y y = f (x) y = f (x + x) f (x) dy y dy = f (x) x x x x x + x Luento 7 1 of 15 Matematiikan ja tilastotieteen laitos Turun yliopisto Muutoksen arviointi differentiaalin
EUREF-FIN/N2000-MUUNNOKSET HELSINGIN KAUPUNGISSA
 1 (10) EUREF-FIN/N2000-MUUNNOKSET HELSINGIN KAUPUNGISSA 5.3.2012 2 (10) Sisältö: 1 Johdanto... 3 1.1 Muunnosasetukset paikkatieto-ohjelmistoissa... 3 1.2 Lisätiedot... 3 2 Korkeusjärjestelmän muunnos NN
1 (10) EUREF-FIN/N2000-MUUNNOKSET HELSINGIN KAUPUNGISSA 5.3.2012 2 (10) Sisältö: 1 Johdanto... 3 1.1 Muunnosasetukset paikkatieto-ohjelmistoissa... 3 1.2 Lisätiedot... 3 2 Korkeusjärjestelmän muunnos NN
Algoritmit 2. Luento 6 Ke Timo Männikkö
 Algoritmit 2 Luento 6 Ke 29.3.2017 Timo Männikkö Luento 6 B-puun operaatiot B-puun muunnelmia Nelipuu Trie-rakenteet Standarditrie Pakattu trie Algoritmit 2 Kevät 2017 Luento 6 Ke 29.3.2017 2/31 B-puu
Algoritmit 2 Luento 6 Ke 29.3.2017 Timo Männikkö Luento 6 B-puun operaatiot B-puun muunnelmia Nelipuu Trie-rakenteet Standarditrie Pakattu trie Algoritmit 2 Kevät 2017 Luento 6 Ke 29.3.2017 2/31 B-puu
Solmu 3/2001 Solmu 3/2001. Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä:
 Frégier n lause Simo K. Kivelä Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä: Suorakulmaisen kolmion kaikki kärjet sijaitsevat paraabelilla y = x 2 ; suoran kulman
Frégier n lause Simo K. Kivelä Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä: Suorakulmaisen kolmion kaikki kärjet sijaitsevat paraabelilla y = x 2 ; suoran kulman
 MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
Ellipsit, hyperbelit ja paraabelit vinossa
 Ellipsit, hyperbelit ja paraabelit vinossa Matti Lehtinen 1 Ellipsi, hyperbeli ja paraabeli suorassa Opimme lukion analyyttisen geometrian kurssilla ainakin, jos kävimme lukiota vielä muutama vuosi sitten
Ellipsit, hyperbelit ja paraabelit vinossa Matti Lehtinen 1 Ellipsi, hyperbeli ja paraabeli suorassa Opimme lukion analyyttisen geometrian kurssilla ainakin, jos kävimme lukiota vielä muutama vuosi sitten
2 Pistejoukko koordinaatistossa
 Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Piste ja jana koordinaatistossa
 607 Piste ja jana koordinaatistossa ANALYYTTINEN GEOMETRIA MAA5 Kertausta kurssi Eri asioiden välisten riippuvuuksien havainnollistamiseen kätetään usein koordinaatistoesitstä Pstakselilla riippuvan muuttujan
607 Piste ja jana koordinaatistossa ANALYYTTINEN GEOMETRIA MAA5 Kertausta kurssi Eri asioiden välisten riippuvuuksien havainnollistamiseen kätetään usein koordinaatistoesitstä Pstakselilla riippuvan muuttujan
3 TOISEN ASTEEN POLYNOMIFUNKTIO
 3 TOISEN ASTEEN POLYNOMIFUNKTIO POHDITTAVAA 1. Kuvasta voidaan arvioida, että frisbeegolfkiekko käy noin 9 metrin korkeudella ja se lentää noin 40 metrin päähän. Vastaus: Frisbeegolfkiekko käy n. 9 m:n
3 TOISEN ASTEEN POLYNOMIFUNKTIO POHDITTAVAA 1. Kuvasta voidaan arvioida, että frisbeegolfkiekko käy noin 9 metrin korkeudella ja se lentää noin 40 metrin päähän. Vastaus: Frisbeegolfkiekko käy n. 9 m:n
Ilmakolmioinnin laadunvalvonta fotogrammetristen pintamallien ja laserkeilausaineiston avulla
 Ilmakolmioinnin laadunvalvonta fotogrammetristen pintamallien ja laserkeilausaineiston avulla Aalto-yliopiston insinööritieteiden korkeakoulun maankäyttötieteiden laitoksella tehty diplomityö Espoo, toukokuu
Ilmakolmioinnin laadunvalvonta fotogrammetristen pintamallien ja laserkeilausaineiston avulla Aalto-yliopiston insinööritieteiden korkeakoulun maankäyttötieteiden laitoksella tehty diplomityö Espoo, toukokuu
FOTOGRAMMETRINEN PISTETIHENNYS
 FOTOGRAMMETRINEN PISTETIHENNYS 1. Yleistä 2. Ilmakuvaus SKM Gisair Oy Työssä määritettiin ulkoinen orientointi Sotkamon kunnan keskustan alueen ilmakuvaukselle. Ilmakuvauksen teki SKM Gisair Oy keväällä
FOTOGRAMMETRINEN PISTETIHENNYS 1. Yleistä 2. Ilmakuvaus SKM Gisair Oy Työssä määritettiin ulkoinen orientointi Sotkamon kunnan keskustan alueen ilmakuvaukselle. Ilmakuvauksen teki SKM Gisair Oy keväällä
LIITE 1 VIRHEEN ARVIOINNISTA
 1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
Yhtälöryhmät 1/6 Sisältö ESITIEDOT: yhtälöt
 Yhtälöryhmät 1/6 Sisältö Yhtälöryhmä Yhtälöryhmässä on useita yhtälöitä ja yleensä myös useita tuntemattomia. Tavoitteena on löytää tuntemattomille sellaiset arvot, että kaikki yhtälöt toteutuvat samanaikaisesti.
Yhtälöryhmät 1/6 Sisältö Yhtälöryhmä Yhtälöryhmässä on useita yhtälöitä ja yleensä myös useita tuntemattomia. Tavoitteena on löytää tuntemattomille sellaiset arvot, että kaikki yhtälöt toteutuvat samanaikaisesti.
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 2017 Insinöörivalinnan matematiikan koe , Ratkaisut (Sarja A)
") Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 017 Insinöörivalinnan matematiikan koe 30..017, Ratkaisut (Sarja A) 1. a) Lukujen 9, 0, 3 ja x keskiarvo on. Määritä x. (1 p.) b) Mitkä reaaliluvut
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 017 Insinöörivalinnan matematiikan koe 30..017, Ratkaisut (Sarja A) 1. a) Lukujen 9, 0, 3 ja x keskiarvo on. Määritä x. (1 p.) b) Mitkä reaaliluvut
5 Kertaus: Matemaattisia malleja
 5 Kertaus: Matemaattisia malleja 5. Kurssin keskeiset asiat. a) Muodostetaan suoran yhtälö kulmakerroin k = ja pisteen (0, 3) avulla. y ( 3) ( x 0) y 3 x y x 3 b) Muodostetaan suoran yhtälö kulmakerroin
5 Kertaus: Matemaattisia malleja 5. Kurssin keskeiset asiat. a) Muodostetaan suoran yhtälö kulmakerroin k = ja pisteen (0, 3) avulla. y ( 3) ( x 0) y 3 x y x 3 b) Muodostetaan suoran yhtälö kulmakerroin
Luento 4: Kolmiointihavainnot
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Käy vastaamassa kyselyyn kurssin pedanet-sivulla (TÄRKEÄ ensi vuotta ajatellen) Kurssin suorittaminen ja arviointi: vähintään 50 tehtävää tehtynä
 Kurssin suorittaminen ja arviointi: vähintään 50 tehtävää tehtynä") Käy vastaamassa kyselyyn kurssin pedanet-sivulla (TÄRKEÄ ensi vuotta ajatellen) Kurssin suorittaminen ja arviointi: vähintään 50 tehtävää tehtynä (vihkon palautus kokeeseen tullessa) Koe Mahdolliset testit
Käy vastaamassa kyselyyn kurssin pedanet-sivulla (TÄRKEÄ ensi vuotta ajatellen) Kurssin suorittaminen ja arviointi: vähintään 50 tehtävää tehtynä (vihkon palautus kokeeseen tullessa) Koe Mahdolliset testit
MAA7 7.1 Koe Jussi Tyni Valitse kuusi tehtävää! Tee vastauspaperiin pisteytysruudukko! Kaikkiin tehtäviin välivaiheet näkyviin!
 MAA7 7.1 Koe Jussi Tyni 9.1.01 1. Laske raja-arvot: a) 5 lim 5 10 b) lim 9 71. a) Määritä erotusosamäärän avulla funktion f (). f ( ) derivaatta 1 b) Millä välillä funktio f ( ) 9 on kasvava? Perustele
MAA7 7.1 Koe Jussi Tyni 9.1.01 1. Laske raja-arvot: a) 5 lim 5 10 b) lim 9 71. a) Määritä erotusosamäärän avulla funktion f (). f ( ) derivaatta 1 b) Millä välillä funktio f ( ) 9 on kasvava? Perustele
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä.
 Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä.") MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016
yleisessä muodossa x y ax by c 0. 6p
 MAA..0 Muista kirjoittaa jokaiseen paperiin nimesi! Tee vastauspaperin yläreunaan pisteytysruudukko! Valitse kuusi tehtävää! Perustele vastauksesi välivaiheilla! Jussi Tyni Ratkaise: a) x x b) xy x 6y
MAA..0 Muista kirjoittaa jokaiseen paperiin nimesi! Tee vastauspaperin yläreunaan pisteytysruudukko! Valitse kuusi tehtävää! Perustele vastauksesi välivaiheilla! Jussi Tyni Ratkaise: a) x x b) xy x 6y
EUREF-FIN JA KORKEUDET. Pasi Häkli Geodeettinen laitos 10.3.2010
 EUREF-FIN JA KORKEUDET Pasi Häkli Geodeettinen laitos 10.3.2010 EUREF-FIN:n joitain pääominaisuuksia ITRF96-koordinaatiston kautta globaalin koordinaattijärjestelmän paikallinen/kansallinen realisaatio
EUREF-FIN JA KORKEUDET Pasi Häkli Geodeettinen laitos 10.3.2010 EUREF-FIN:n joitain pääominaisuuksia ITRF96-koordinaatiston kautta globaalin koordinaattijärjestelmän paikallinen/kansallinen realisaatio
TEHTÄVIEN RATKAISUT. Luku a) Merkintä f (5) tarkoittaa lukua, jonka funktio tuottaa, kun siihen syötetään luku 5.
 Merkintä f (5) tarkoittaa lukua, jonka funktio tuottaa, kun siihen syötetään luku 5.") TEHTÄVIEN RATKAISUT Luku 4.1 183. a) Merkintä f (5) tarkoittaa lukua, jonka funktio tuottaa, kun siihen syötetään luku 5. Lasketaan funktioon syötetyn luvun neliö: 5 = 5. Saatuun arvoon lisätään luku 1:
TEHTÄVIEN RATKAISUT Luku 4.1 183. a) Merkintä f (5) tarkoittaa lukua, jonka funktio tuottaa, kun siihen syötetään luku 5. Lasketaan funktioon syötetyn luvun neliö: 5 = 5. Saatuun arvoon lisätään luku 1:
Ei välttämättä, se voi olla esimerkiksi Reuleaux n kolmio:
 Inversio-ongelmista Craig, Brown: Inverse problems in astronomy, Adam Hilger 1986. Havaitaan oppositiossa olevaa asteroidia. Pyörimisestä huolimatta sen kirkkaus ei muutu. Projisoitu pinta-ala pysyy ilmeisesti
Inversio-ongelmista Craig, Brown: Inverse problems in astronomy, Adam Hilger 1986. Havaitaan oppositiossa olevaa asteroidia. Pyörimisestä huolimatta sen kirkkaus ei muutu. Projisoitu pinta-ala pysyy ilmeisesti
Stereopaikannusjärjestelmän tarkkuus (3 op)
") Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Huippu 4 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty
 KERTAUS KERTAUSTEHTÄVIÄ K1. a) Kun suoran s pisteen -koordinaatti kasvaa yhdellä, pisteen y- koordinaatti kasvaa kahdella. Suoran s kulmakerroin on siis. Kun suoran t pisteen -koordinaatti kasvaa kahdella,
KERTAUS KERTAUSTEHTÄVIÄ K1. a) Kun suoran s pisteen -koordinaatti kasvaa yhdellä, pisteen y- koordinaatti kasvaa kahdella. Suoran s kulmakerroin on siis. Kun suoran t pisteen -koordinaatti kasvaa kahdella,
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 1: Moniulotteiset integraalit
 MS-A35 ifferentiaali- ja integraalilaskenta 3 Luento : Moniulotteiset integraalit Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 26 Antti Rasila (Aalto-yliopisto) MS-A35 Syksy
MS-A35 ifferentiaali- ja integraalilaskenta 3 Luento : Moniulotteiset integraalit Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 26 Antti Rasila (Aalto-yliopisto) MS-A35 Syksy
1/6 TEKNIIKKA JA LIIKENNE FYSIIKAN LABORATORIO V1.31 9.2011
 1/6 333. SÄDEOPTIIKKA JA FOTOMETRIA A. INSSIN POTTOVÄIN JA TAITTOKYVYN MÄÄRITTÄMINEN 1. Työn tavoite. Teoriaa 3. Työn suoritus Työssä perehdytään valon kulkuun väliaineissa ja niiden rajapinnoissa sädeoptiikan
1/6 333. SÄDEOPTIIKKA JA FOTOMETRIA A. INSSIN POTTOVÄIN JA TAITTOKYVYN MÄÄRITTÄMINEN 1. Työn tavoite. Teoriaa 3. Työn suoritus Työssä perehdytään valon kulkuun väliaineissa ja niiden rajapinnoissa sädeoptiikan
Tekijä Pitkä matematiikka Pisteen (x, y) etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.
 etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.") Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
Laudatur 4 MAA4 ratkaisut kertausharjoituksiin
 Laudatur MAA ratkaisut kertausharjoituksiin Yhtälöparit ja yhtälöryhmät 6. a) x y = 7 eli,y+, sijoitetaan alempaan yhtälöön x+ 7y = (, y+, ) + 7y =,y =, y = Sijoitetaan y = yhtälöparin ylempään yhtälöön.,
Laudatur MAA ratkaisut kertausharjoituksiin Yhtälöparit ja yhtälöryhmät 6. a) x y = 7 eli,y+, sijoitetaan alempaan yhtälöön x+ 7y = (, y+, ) + 7y =,y =, y = Sijoitetaan y = yhtälöparin ylempään yhtälöön.,
1 ENSIMMÄISEN ASTEEN POLYNOMIFUNKTIO
 1 ENSIMMÄISEN ASTEEN POLYNOMIFUNKTIO POHDITTAVAA 1. Lämpötila maanpinnalla nähdään suoran ja y-akselin leikkauspisteen y- koordinaatista, joka on noin 10. Kun syvyys on 15 km, nähdään suoralta, että lämpötila
1 ENSIMMÄISEN ASTEEN POLYNOMIFUNKTIO POHDITTAVAA 1. Lämpötila maanpinnalla nähdään suoran ja y-akselin leikkauspisteen y- koordinaatista, joka on noin 10. Kun syvyys on 15 km, nähdään suoralta, että lämpötila
RATKAISUT a + b 2c = a + b 2 ab = ( a ) 2 2 ab + ( b ) 2 = ( a b ) 2 > 0, koska a b oletuksen perusteella. Väite on todistettu.
 2 2 ab + ( b ) 2 = ( a b ) 2 > 0, koska a b oletuksen perusteella. Väite on todistettu.") RATKAISUT 198 197 198. Olkoon suorakulmion erisuuntaisten sivujen pituudet a ja b sekä neliön sivun pituus c. Tehtävä on mielekäs vain, jos suorakulmio ei ole neliö, joten oletetaan, että a b. Suorakulmion
RATKAISUT 198 197 198. Olkoon suorakulmion erisuuntaisten sivujen pituudet a ja b sekä neliön sivun pituus c. Tehtävä on mielekäs vain, jos suorakulmio ei ole neliö, joten oletetaan, että a b. Suorakulmion
3.3 Paraabeli toisen asteen polynomifunktion kuvaajana. Toisen asteen epäyhtälö
 3.3 Paraabeli toisen asteen polynomifunktion kuvaajana. Toisen asteen epäyhtälö Yhtälön (tai funktion) y = a + b + c, missä a 0, kuvaaja ei ole suora, mutta ei ole yhtälökään ensimmäistä astetta. Funktioiden
3.3 Paraabeli toisen asteen polynomifunktion kuvaajana. Toisen asteen epäyhtälö Yhtälön (tai funktion) y = a + b + c, missä a 0, kuvaaja ei ole suora, mutta ei ole yhtälökään ensimmäistä astetta. Funktioiden
1. Olkoot vektorit a, b ja c seuraavasti määritelty: a) Määritä vektori. sekä laske sen pituus.
 Määritä vektori. sekä laske sen pituus.") Matematiikan kurssikoe, Maa4 Vektorit RATKAISUT Sievin lukio Keskiviikko 12.4.2017 VASTAA YHTEENSÄ VIITEEN TEHTÄVÄÄN! MAOL JA LASKIN/LAS- KINOHJELMAT OVAT SALLITTUJA! 1. Olkoot vektorit a, b ja c seuraavasti
Matematiikan kurssikoe, Maa4 Vektorit RATKAISUT Sievin lukio Keskiviikko 12.4.2017 VASTAA YHTEENSÄ VIITEEN TEHTÄVÄÄN! MAOL JA LASKIN/LAS- KINOHJELMAT OVAT SALLITTUJA! 1. Olkoot vektorit a, b ja c seuraavasti
Tämä luku nojaa vahvasti esimerkkeihin. Aloitetaan palauttamalla mieleen, mitä koordinaatistolla tarkoitetaan.
 MAB: Koordinaatisto geometrian apuna Aluksi Geometriassa tulee silloin tällöin eteen tilanne, jossa piirroksen tekeminen koordinaatistoon yksinkertaistaa laskuja. Toisinaan taas tilanne on muuten vaan
MAB: Koordinaatisto geometrian apuna Aluksi Geometriassa tulee silloin tällöin eteen tilanne, jossa piirroksen tekeminen koordinaatistoon yksinkertaistaa laskuja. Toisinaan taas tilanne on muuten vaan
TTY Mittausten koekenttä. Käyttö. Sijainti
 TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
Paraabeli suuntaisia suoria.
 15.5.017 Paraabeli Määritelmä, Paraabeli: Paraabeli on tason niiden pisteiden ura, jotka ovat yhtä etäällä annetusta suorasta, johtosuorasta ja sen ulkopuolella olevasta pisteestä, polttopisteestä. Esimerkki
15.5.017 Paraabeli Määritelmä, Paraabeli: Paraabeli on tason niiden pisteiden ura, jotka ovat yhtä etäällä annetusta suorasta, johtosuorasta ja sen ulkopuolella olevasta pisteestä, polttopisteestä. Esimerkki
matematiikka Martti Heinonen Markus Luoma Leena Mannila Kati Rautakorpi-Salmio Timo Tapiainen Tommi Tikka Timo Urpiola
 9 E matematiikka Martti Heinonen Markus Luoma Leena Mannila Kati Rautakorpi-Salmio Timo Tapiainen Tommi Tikka Timo Urpiola Helsingissä Kustannusosakeyhtiö Otava Yhteenlaskumenetelmän harjoittelua Joskus
9 E matematiikka Martti Heinonen Markus Luoma Leena Mannila Kati Rautakorpi-Salmio Timo Tapiainen Tommi Tikka Timo Urpiola Helsingissä Kustannusosakeyhtiö Otava Yhteenlaskumenetelmän harjoittelua Joskus
1 Ensimmäisen asteen polynomifunktio
 Ensimmäisen asteen polynomifunktio ENNAKKOTEHTÄVÄT. a) f(x) = x 4 b) Nollakohdassa funktio f saa arvon nolla eli kuvaaja kohtaa x-akselin. Kuvaajan perusteella funktion nollakohta on x,. c) Funktion f
Ensimmäisen asteen polynomifunktio ENNAKKOTEHTÄVÄT. a) f(x) = x 4 b) Nollakohdassa funktio f saa arvon nolla eli kuvaaja kohtaa x-akselin. Kuvaajan perusteella funktion nollakohta on x,. c) Funktion f
LIITE 1 VIRHEEN ARVIOINNISTA
 1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
3 = Lisäksi z(4, 9) = = 21, joten kysytty lineaarinen approksimaatio on. L(x,y) =
 = = 21, joten kysytty lineaarinen approksimaatio on. L(x,y) =") BM20A5810 Differentiaalilaskenta ja sovellukset Harjoitus 6, Syksy 2016 1. (a) Olkoon z = z(x,y) = yx 1/2 + y 1/2. Muodosta z:lle lineaarinen approksimaatio L(x,y) siten että approksimaation ja z:n arvot
BM20A5810 Differentiaalilaskenta ja sovellukset Harjoitus 6, Syksy 2016 1. (a) Olkoon z = z(x,y) = yx 1/2 + y 1/2. Muodosta z:lle lineaarinen approksimaatio L(x,y) siten että approksimaation ja z:n arvot
Sovellettu todennäköisyyslaskenta B
 Sovellettu todennäköisyyslaskenta B Antti Rasila 30. marraskuuta 2007 Antti Rasila () TodB 30. marraskuuta 2007 1 / 19 1 Lineaarinen regressiomalli ja suurimman uskottavuuden menetelmä Minimin löytäminen
Sovellettu todennäköisyyslaskenta B Antti Rasila 30. marraskuuta 2007 Antti Rasila () TodB 30. marraskuuta 2007 1 / 19 1 Lineaarinen regressiomalli ja suurimman uskottavuuden menetelmä Minimin löytäminen
jakokulmassa x 4 x 8 x 3x
 Laudatur MAA ratkaisut kertausarjoituksiin. Polynomifunktion nollakodat 6 + 7. Suoritetaan jakolasku jakokulmassa 5 4 + + 4 8 6 6 5 4 + 0 + 0 + 0 + 0+ 6 5 ± 5 5 4 ± 4 4 ± 4 4 ± 4 8 8 ± 8 6 6 + ± 6 Vastaus:
Laudatur MAA ratkaisut kertausarjoituksiin. Polynomifunktion nollakodat 6 + 7. Suoritetaan jakolasku jakokulmassa 5 4 + + 4 8 6 6 5 4 + 0 + 0 + 0 + 0+ 6 5 ± 5 5 4 ± 4 4 ± 4 4 ± 4 8 8 ± 8 6 6 + ± 6 Vastaus:
Suorat ja tasot, L6. Suuntajana. Suora xy-tasossa. Suora xyzkoordinaatistossa. Taso xyzkoordinaatistossa. Tason koordinaattimuotoinen yhtälö.
 Suorat ja tasot, L6 Suora xyz-koordinaatistossa Taso xyz-koordinaatistossa stä stä 1 Näillä kalvoilla käsittelemme kolmen laisia olioita. Suora xyz-avaruudessa. Taso xyz-avaruudessa. Emme nyt ryhdy pohtimaan,
Suorat ja tasot, L6 Suora xyz-koordinaatistossa Taso xyz-koordinaatistossa stä stä 1 Näillä kalvoilla käsittelemme kolmen laisia olioita. Suora xyz-avaruudessa. Taso xyz-avaruudessa. Emme nyt ryhdy pohtimaan,
LIITE 1 VIRHEEN ARVIOINNISTA
 Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
4. Funktion arvioimisesta eli approksimoimisesta
 4. Funktion arvioimisesta eli approksimoimisesta Vaikka nykyaikaiset laskimet osaavatkin melkein kaiken muun välttämättömän paitsi kahvinkeiton, niin joskus, milloin mistäkin syystä, löytää itsensä tilanteessa,
4. Funktion arvioimisesta eli approksimoimisesta Vaikka nykyaikaiset laskimet osaavatkin melkein kaiken muun välttämättömän paitsi kahvinkeiton, niin joskus, milloin mistäkin syystä, löytää itsensä tilanteessa,
Ensimmäisen asteen polynomifunktio
 Ensimmäisen asteen polnomifunktio Yhtälön f = a+ b, a 0 määrittelemää funktiota sanotaan ensimmäisen asteen polnomifunktioksi. Esimerkki. Ensimmäisen asteen polnomifuktioita ovat esimerkiksi f = 3 7, v()
Ensimmäisen asteen polnomifunktio Yhtälön f = a+ b, a 0 määrittelemää funktiota sanotaan ensimmäisen asteen polnomifunktioksi. Esimerkki. Ensimmäisen asteen polnomifuktioita ovat esimerkiksi f = 3 7, v()
Lineaarinen yhtälöryhmä
 Lineaarinen yhtälöryhmä 1 / 39 Lineaarinen yhtälö Määritelmä 1 Lineaarinen yhtälö on muotoa a 1 x 1 + a 2 x 2 + + a n x n = b, missä a i, b R, i = 1,..., n ovat tunnettuja ja x i R, i = 1,..., n ovat tuntemattomia.
Lineaarinen yhtälöryhmä 1 / 39 Lineaarinen yhtälö Määritelmä 1 Lineaarinen yhtälö on muotoa a 1 x 1 + a 2 x 2 + + a n x n = b, missä a i, b R, i = 1,..., n ovat tunnettuja ja x i R, i = 1,..., n ovat tuntemattomia.
KJR-C1001: Statiikka L5 Luento : Palkin normaali- ja leikkausvoima sekä taivutusmomentti
 KJR-C1001: Statiikka L5 Luento : Palkin normaali- ja leikkausvoima sekä taivutusmomentti Apulaisprofessori Konetekniikan laitos Statiikan välikoe 12.3.2018 Ajankohta ma 12.3.2018 klo 14:00 17:00 Salijako
KJR-C1001: Statiikka L5 Luento : Palkin normaali- ja leikkausvoima sekä taivutusmomentti Apulaisprofessori Konetekniikan laitos Statiikan välikoe 12.3.2018 Ajankohta ma 12.3.2018 klo 14:00 17:00 Salijako
Fysiikan laboratoriotyöt 1, työ nro: 2, Harmoninen värähtelijä
 Fysiikan laboratoriotyöt 1, työ nro: 2, Harmoninen värähtelijä Tekijä: Mikko Laine Tekijän sähköpostiosoite: miklaine@student.oulu.fi Koulutusohjelma: Fysiikka Mittausten suorituspäivä: 04.02.2013 Työn
Fysiikan laboratoriotyöt 1, työ nro: 2, Harmoninen värähtelijä Tekijä: Mikko Laine Tekijän sähköpostiosoite: miklaine@student.oulu.fi Koulutusohjelma: Fysiikka Mittausten suorituspäivä: 04.02.2013 Työn