Luento 7 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
|
|
|
- Hannes Korpela
- 5 vuotta sitten
- Katselukertoja:
Transkriptio
1 Luento 7 3-D mittaus 1
2 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat alustetaan? Miten havaitaan? Kuvien analysointi Miten kuvia tulkitaan? Miten mitataan? Kuvien esittäminen Miten kuvat esitetään? Miten moniulotteisuus havainnollistetaan? 2
3 3-D mittaus Säteettäissiirtymä. Yksikuvamittaus. Parallaksimittaus. Avaruusmittamerkki. Etäisyysmittaus stereokuvalla. Etäisyysmittauksen epätarkkuus. Korkeuserojen mittaaminen parallaksieroista. Parallaksimittaus stereomikrometrillä. Kolmiulotteinen mittaaminen. 3D parallaksikaavat. Esimerkki: "Laatikot. Parallaksimittauksiin rajoittuvat stereokartoituslaitteet. Stereomalli. Keskinäinen orientointi. 3
4 Säteettäissiirtymä 4
5 Maanpinta ilmakuvalla 5
6 Maanpinta kartalla 6

7 Monumentin korkeus? Säteettäissiirtymään perustuva mittaus Oheisen kuvan koko on 600 x 593 pikseliä Ikonos-satelliitin keilaimen kuva-alkio on maan pinnalla 1 m Satelliitin ratakorkeus on 680 km. Muistomerkin etäisyys satelliitin kuvanadiiriin on 180 km. Kuva on pystykuva ja maanpinta oletetaan tasoksi. Huomattakoon, että kuvanadiiri on tässä tapauksessa kuvan ulkopuolella. 7
8 Kuvausgeometria 8

9 Siirtymän mittaus kuvalta Voidaan olettaa, että muistomerkki on pystysuorassa ja sen korkeus voidaan laskea kuvaustietojen perusteella. Tulkitaan ensin muistomerkin pääpystysuora eli keskiakseli ja piirretään se kuvalle sekä muistomerkin suunnassa että sen varjon suunnassa. Suorien leikkauspiste on pääpystysuoran päätepiste maan pinnalla. Toinen päätepiste on muistomerkin kärjessä. 9
10 Mittaustulos Muistomerkin pituus (säteettäissiirtymä) on kuvalta mitattuna 45,9 pikseliä, mikä vastaa kohteella 45,9 m. Havainnosta lasketaan muistomerkin korkeudeksi 173 m. Todellinen korkeus on 169 m, jota vastaava säteettäissiirtymä olisi 44,8 m. Ero johtuu sekä oletusten että havaintojen epätarkkuuksista. Hyvä arvio kuvahavainnon epätarkkuudesta tässä esimerkissä olisi ± 0,5 pikseliä, mikä vastaa korkeudessa ± 2 m. Kuvanadiirissa säteettäissiirtymää ei ole ja säteettäissirtymään perustuva korkeudenmittaus onkin mahdollista vain etäällä kuvanadiirista. 10

11 Parallaksi 11
12 Parallaksien synty 1 12
13 Parallaksien synty 2 13

14 Parallaksit positiiviasennossa 14


15 Parallaksit negatiiviasennossa 15
16 Parallaksit 16
17 Parallaksin mittaaminen 17
18 Vaaka- ja pystyparallaksi Parallaksi havaitaan kuvatasolla kuvakoordinaattien x'' ja x' erotuksena. Tätä kuvakannan suuntaista parallaksia kutsutaan myös vaakaparallaksiksi erotuksena sitä vastaan kohtisuorasta y- eli pystyparallaksista. Stereokuvauksen normaalitapauksessa kuvakoordinaatit y' ja y' ovat aina yhtäsuuret eli pystyparallaksi on nolla (Miksi?). Vaakaparallaksi on nolla vain, jos kohde on äärettömän kaukana tai jos kuvat on otettu samasta pisteestä. Kummassakin tapauksessa kuvat ovat identtiset eikä kuvia voi käyttää etäisyyksien mittaamiseen. 18
19 Parallaksin muutokset I Stereokuvauksen normaalitapauksessa Parallaksi muuttuu Kun kuvakanta kasvaa, parallaksi kuvalla kasvaa. Kun polttoväli kasvaa, parallaksi kuvalla kasvaa. Parallaksi pysyy samana Samalla kohtisuoralla etäisyydellä olevien pisteiden parallaksi pysyy samana. 19
20 Parallaksin muutokset II Parallaksi = 0 Kun kuvakanta B kasvaa, parallaksi kasvaa Kun polttoväli tai kameravakio c kasvaa, parallaksi kasvaa 20
21 Parallaksi 21
22 Parallaksi eri X-arvoilla Parallaktinen kulma muuttuu Parallaksi kuvalla ei muutu 22
23 Parallaksi eri Y-arvoilla Parallaktinen kulma muuttuu Parallaksi kuvalla ei muutu 23
24 Kohtisuora etäisyys? Z c B p x 24
25 Ilmakuvapari Sokos 25
26 Etäisyydenmittaus ilmakuvalla Tunnetaan kameravakio kuvakanta tai lentokorkeus kuvamittakaava Havaitaan parallaksi Lasketaan kohtisuora etäisyys 26
27 Parallaksin mittaaminen 27
28 Etäisyyserojen mittaus ilmakuvalla 28
29 Etäisyyserojen mittaus ilmakuvalla 29
30 Korkeuseron laskeminen 30
31 Korkeuseron laskeminen 31
32 Parallaksi ilmakuvalla Kuva: Albertz,



33 Korkeuserojen mittaus stereokuvalla Parallaksitanko Stereomikrometri 33
34 Parallaksitanko Peilistereoskooppi on fotogrammetrinen tullintakoje, jolla voidaan myös mitata maaston korkeuseroja. Parallaksimittaukset tehdään ns. parallaksitangolla ja siihen liittyvällä mitta-asteikolla, stereomikrometrillä. Tangon kummassakin päässä on lasilevyt, joihin on kaiverrettu kohdistusmerkit (mittamerkit) mitattavan kohdepisteen tarkkaa osoittamista varten. Tangon pituutta säädetään sen oikessa päässä olevaa mikrometriruuvia kiertämällä. Parallaksihavainnot luetaan mikroimetriruuvin kierroksia seuraavalta mitta-asteikolta. Tangon vasemmassa päässä näkyvä mitta-asteikko liittyy parallaksihavaintojen vakio-osan eli kuvakannan säätämiseen. Kuvakanta säädetään pääpisteiden mukaan sen jälkeen, kun kuvat on orientoitu keskenään 34
35 Etäisyysmittauksen epätarkkuus I Etäisyysmittauksen tarkkuus stereokuvauksen normaalitapauksessa on suoraan verrannollinen kuvan mittakaavaan, ja parallaksieron mittaustarkkuuteen, ja kääntäen verrannollinen kantasuhteeseen. 35
36 Etäisyysmittauksen epätarkkuus II 36
37 Stereoskooppinen mittaus Kohteen stereoskooppinen näkeminen perustuu parallakseihin. Vastaavasti voidaan stereokuvaparilta mitata etäisyyksiä kuvanottopaikalta kohteeseeen. Etäisyydet lasketaan parallakseista, jotka syntyvät, kun kohdetta kuvataan kahdesta suunnasta. Normaalitapauksen mukaiselta kuvaparilta etäisyyksien laskemiseen riittää, että tunnetaan kuvanottopaikkojen väli (kuvakanta) ja kameran polttoväli (kameravakio). 37

38 Avaruusmittamerkki Edessä Takana 38
39 Avaruusmittamerkki Illuusio mittamerkistä Mittamerkit kuvilla Silmät 39

40 Avaruusmittamerkki Optinen stereokartoituskoje Kuvat: Halonen,



41 Avaruusmittamerkki Analyyttinen stereokartoituskoje Zeiss, PHODIS ST LH Systems, SOCET SET 41
42 Kohteen 3D muoto Kohteen muoto mitataan 3D koordinaatteina. Fotogrammetriassa kolmiulotteinen mittaaminen perustuu kohdepisteen 2D koordinaattien mittaamiseen kuvalta ja kolmannen eli etäisyyskoordinaatin mittaamiseen parallaksihavainnoista. Stereokuvauksen normaalitapauksessa 3D koordinaattien laskeminen perustuu ns. parallaksikaavoihin. Muissa kuin stereokuvauksen normaalitapauksen mukaisissa kuvaustilanteissa, joita ovat konvergentit kuvaparit tai kuvien ulkoisiin orientointeihin perustuvat mittaus- ja kartoitustehtävät, koordinaattien laskeminen perustuu eteenpäinleikkaukseen avaruudessa, ja keskusprojektiokuvauksen mukaisiin yleisiin perspektiivikaavoihin. 42
43 3D mittaus 43
44 XY-koordinaattien laskeminen X-, Y- ja Z- kohdekoordinaatit lasketaan kertomalla vastaavat kamerakoordinaatit x, y, ja c mittakaavaluvulla. Kolmiulotteisessa kohteessa jokaisella kohdepisteellä on oma mittakaavalukunsa M, joka on sitä pienempi mitä lähempänä kyseinen piste on kamerasta ja sitä suurempi mitä kauempana. Mittakaavaluku M lasketaan kuvakannan ja parallaksin tai kohdepisteen etäisyyskoordinaatin ja kameravakion suhteesta. Koordinaatit voidaan laskea myös kuvaparin oikeanpuoleisen kuvan x- ja y-koordinaateista, mutta silloin on huomioitava vastaava origon siirto eli X-koordinaattiin on lisättävä kanta B. 44


45 3D mittaus 45
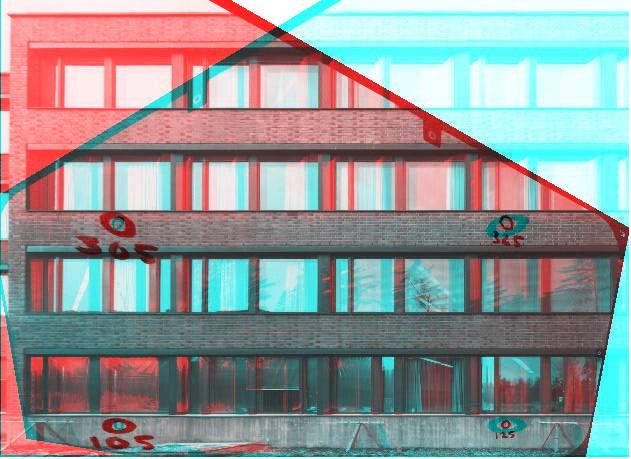
46 Laatikot Oheisessa esimerkissä on kuvattu laatikoita pöydällä ja tarkoitus on mitata laatikoiden sekä alla olevan pöytälevyn päämitat. Mittaus tehdään havaitsemalla kohteiden nurkkapisteet kummaltakin kuvalta ja laskemalla sen jälkeen nurkkien 3-D koordinaatit. Päämitat lasketaan nurkkapisteiden avaruusetäisyyksinä. Kuvat on otettu digitaalikameralla, jonka kuvakoko on 1280 x 1024 pikseliä. Kameravakiona käytetään arvoa pikseliä, joka on määritetty etukäteen. Kuvapari on pyritty kuvaamaan stereokuvauksen normaalitapauksen mukaisesti ja kuvakanta on 0.62 m. Lisäksi mitattiin kameran projektiokeskuksen korkeus lattiatasosta, joka oli 1.58 m. 46


47 Kuvapisteen mittaus 47

48 Kamerakoordinaatit 48
49 Parallaksikaavat Kohdekoordinaatit X, Y ja Z lasketaan kamerakoordinaateista x, y ja c joko - tai 49

50 Laatikot, kuvahavainnot Laatikko 1 50
51 Mittaushavainnot ja kamerakoordinaatit. Parallaksit on laskettu erotuksena px = x'' - x' (vaakaparallaksi). Jos kuvat olisi otettu tarkasti stereokuvauksen normaalitapauksen mukaisesti ja kuvista olisi korjattu kameraoptiikan aiheuttamat piirtovirheet, kuvien y'- ja y''koordinaatit olisivat kohdistustarkkuuden puitteissa samat py = y'' - y' => 0 (pystyparallaksi). Nyt niissä on jopa kymmenen pikselin suuruisia eroja. Tässä esimerkissä tällä ei ole merkitystä, koska tarkoitus on havainnollistaa 3-D koordinaattimittauksen periaatetta. Tarkoissa mittaus- ja kartoitustehtävissä tunnetut kuvavirheet otetaan huomioon ja kuvapari oikaistaan normaaliasentoon ennen stereomittauksia (keskinäinen orientointi). 51
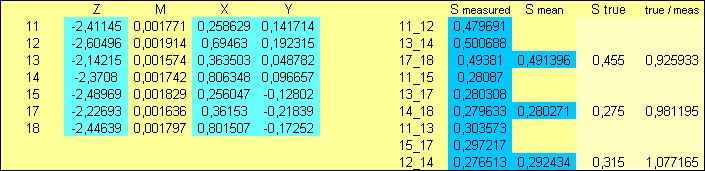
52 Laatikot, kohdekoordinaatit 52
53 Lasketut 3-D koordinaatit Koordinaatit on laskettu parallaksikaavoilla. Sen jälkeen päämitat on laskettu vinoina avaruusetäisyyksinä päätepisteiden koordinaattieroista (S_measured) ja laskettu niiden keskiarvot (S_mean). Tätä keskiarvoa on lopuksi verrattu siihen etäisyyteen, joka on mitattu mittanauhalla samasta päämitasta suoraan kohteella (S_true). Vertailusta nähdään, että tässä tapauksessa mittausepävarmuus on luokkaa 5-10 %, kun tällä samalla kuvaparilla se voisi tarkasti mitaten olla niinkin pieni kuin 0.01 %. 53
54 Keskinäinen orientointi Kuvaparin asemointi stereokuvauksen normaalitapaukseen Normaalitapauksessa Vastinsydänsuorat kohdistetaan toisiinsa niin, että pääpisteet asettuvat samalle suoralle Kierto ja siirto 54

55 Keskinäinen orientointi, kallistunut kuvaus Kuvat oikaistaan stereokuvauksen normaalitapaukseen 55



56 Kuvaparin oikaisu 56
57 Oikaistu stereokuvapari 57
Luento 9 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 4 Georeferointi Maa Fotogrammetrian perusteet 1
 Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi
 Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 6: 3-D koordinaatit
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Luento 5: Stereoskooppinen mittaaminen
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Luento 2 Stereokuvan laskeminen. 2008 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 6 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 7: Fotogrammetrinen mittausprosessi
 7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Luento 10 3-D maailma. fotogrammetriaan ja kaukokartoitukseen
 Luento 10 3-D maailma 1 Luennot 2007 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 10 3-D maailma 1 Luennot 2007 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 11: Stereomallin ulkoinen orientointi
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Luento 6: Stereo- ja jonomallin muodostaminen
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Luento 5. Stereomittauksen tarkkuus Maa Fotogrammetrian perusteet 1
 Luento 5 Stereomittauksen tarkkuus 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin
Luento 5 Stereomittauksen tarkkuus 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin
Luento 4: Kuvien geometrinen tulkinta
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kuvien geometrinen tulkinta AIHEITA Muunnokset informaatiokanavassa Geometrisen tulkinnan vaihtoehdot Mittakaava
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kuvien geometrinen tulkinta AIHEITA Muunnokset informaatiokanavassa Geometrisen tulkinnan vaihtoehdot Mittakaava
Luento 3: Kuvahavainnot
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Luento 4 Kolmiulotteiset kuvat. fotogrammetriaan ja kaukokartoitukseen
 Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Luento 8: Kolmiointi AIHEITA. Kolmiointi. Maa-57.301 Fotogrammetrian yleiskurssi. Luento-ohjelma 1 2 3 4 5 6 7 8 9 10
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Luento 4: Kiertomatriisi
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Luento 2: Kuvakoordinaattien mittaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 14.9.2005) Luento 2: Kuvakoordinaattien mittaus Mitä pitäisi oppia? Muunnokset informaatiokanavassa (osin kertausta) Erotella kuvaan ja
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 14.9.2005) Luento 2: Kuvakoordinaattien mittaus Mitä pitäisi oppia? Muunnokset informaatiokanavassa (osin kertausta) Erotella kuvaan ja
(Petri Rönnholm / Henrik Haggrén, ) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot.
 Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot.") Maa-57.301 Fotogrammetrian yleiskurssi (Petri Rönnholm / Henrik Haggrén, 12.9.2005) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot. Mitä pitäisi oppia? Palauttaa
Maa-57.301 Fotogrammetrian yleiskurssi (Petri Rönnholm / Henrik Haggrén, 12.9.2005) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot. Mitä pitäisi oppia? Palauttaa
Luento 7: Kuvan ulkoinen orientointi
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Fotogrammetrian termistöä
 Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Luento 4 Kolmiulotteiset kuvat. fotogrammetriaan ja kaukokartoitukseen
 Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Luento 7 Stereokartoituskojeet. 2007 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 7 Stereokartoituskojeet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2 Fotogrammetrinen prosessi 3 Stereokartoituskoje Stereokartoituskojeessa kuvaparin stereoskooppinen tarkastelu ja tarkka
Luento 7 Stereokartoituskojeet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2 Fotogrammetrinen prosessi 3 Stereokartoituskoje Stereokartoituskojeessa kuvaparin stereoskooppinen tarkastelu ja tarkka
Teoreettisia perusteita II
 Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Maa-57.1030 Fotogrammetrian perusteet
 Maa-57.1030 Fotogrammetrian perusteet Luento 8 Kartoitussovellukset Petri Rönnholm/Henrik Haggrén Mitä fotogrammetrisella kartoituksella tuotetaan? 3D koordinaatteja kohteesta Maaston korkeusmalli Topograafiset
Maa-57.1030 Fotogrammetrian perusteet Luento 8 Kartoitussovellukset Petri Rönnholm/Henrik Haggrén Mitä fotogrammetrisella kartoituksella tuotetaan? 3D koordinaatteja kohteesta Maaston korkeusmalli Topograafiset
Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 13.10.2004) Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus AIHEITA Stereomittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 13.10.2004) Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus AIHEITA Stereomittaus
Luento 7 Stereokartoituskojeet Maa Fotogrammetrian perusteet 1
 Luento 7 Stereokartoituskojeet 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2008 Maa-57.1030 Fotogrammetrian perusteet 2 Fotogrammetrinen prosessi 2008
Luento 7 Stereokartoituskojeet 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2008 Maa-57.1030 Fotogrammetrian perusteet 2 Fotogrammetrinen prosessi 2008
Luento Fotogrammetrian perusteet. Henrik Haggrén
 Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Luento 9. Stereokartoituskojeet
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 9. Stereokartoituskojeet AIHEITA Analogiset stereokartoituskojeet Analyyttiset stereokartoituskojeet Digitaalinen
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 9. Stereokartoituskojeet AIHEITA Analogiset stereokartoituskojeet Analyyttiset stereokartoituskojeet Digitaalinen
Luento 3: Keskusprojektiokuvaus
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 11.3.2003, Päivityksiä: Katri Koistinen, 20.1.2004) Luento 3: Keskusprojektiokuvaus
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 11.3.2003, Päivityksiä: Katri Koistinen, 20.1.2004) Luento 3: Keskusprojektiokuvaus
Tekijä Pitkä matematiikka
 K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
Maa-57.260. Kameran kalibrointi. TKK/Fotogrammetria/PP
 Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Luento 6 Mittausten suunnittelu II. erikoissovellukset
 Luento 6 Mittausten suunnittelu II 1 Aiheita Mittausongelman määrittely Tarkkuusluvut Suhteellinen tarkkuusluku Suhteellinen tarkkuus Tarkkuuden arvioiminen Kuvahavainnon keskivirhe Verkon rakennevakio
Luento 6 Mittausten suunnittelu II 1 Aiheita Mittausongelman määrittely Tarkkuusluvut Suhteellinen tarkkuusluku Suhteellinen tarkkuus Tarkkuuden arvioiminen Kuvahavainnon keskivirhe Verkon rakennevakio
Vanhoja koetehtäviä. Analyyttinen geometria 2016
 Vanhoja koetehtäviä Analyyttinen geometria 016 1. Määritä luvun a arvo, kun piste (,3) on käyrällä a(3x + a) = (y - 1). Suora L kulkee pisteen (5,1) kautta ja on kohtisuorassa suoraa 6x + 7y - 19 = 0 vastaan.
Vanhoja koetehtäviä Analyyttinen geometria 016 1. Määritä luvun a arvo, kun piste (,3) on käyrällä a(3x + a) = (y - 1). Suora L kulkee pisteen (5,1) kautta ja on kohtisuorassa suoraa 6x + 7y - 19 = 0 vastaan.
Ilmakolmioinnin laadunvalvonta fotogrammetristen pintamallien ja laserkeilausaineiston avulla
 Ilmakolmioinnin laadunvalvonta fotogrammetristen pintamallien ja laserkeilausaineiston avulla Aalto-yliopiston insinööritieteiden korkeakoulun maankäyttötieteiden laitoksella tehty diplomityö Espoo, toukokuu
Ilmakolmioinnin laadunvalvonta fotogrammetristen pintamallien ja laserkeilausaineiston avulla Aalto-yliopiston insinööritieteiden korkeakoulun maankäyttötieteiden laitoksella tehty diplomityö Espoo, toukokuu
1) Maan muodon selvittäminen. 2) Leveys- ja pituuspiirit. 3) Mittaaminen
 Maan muodon selvittäminen. 2) Leveys- ja pituuspiirit. 3) Mittaaminen") 1) Maan muodon selvittäminen Nykyään on helppo sanoa, että maa on pallon muotoinen olet todennäköisesti itsekin nähnyt kuvia maasta avaruudesta kuvattuna. Mutta onko maapallomme täydellinen pallo? Tutki
1) Maan muodon selvittäminen Nykyään on helppo sanoa, että maa on pallon muotoinen olet todennäköisesti itsekin nähnyt kuvia maasta avaruudesta kuvattuna. Mutta onko maapallomme täydellinen pallo? Tutki
Luento 10: Optinen 3-D mittaus ja laserkeilaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
y=-3x+2 y=2x-3 y=3x+2 x = = 6
 MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
TTY Mittausten koekenttä. Käyttö. Sijainti
 TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
KUITUPUUN PINO- MITTAUS
 KUITUPUUN PINO- MITTAUS Ohje KUITUPUUN PINOMITTAUS Ohje perustuu maa- ja metsätalousministeriön 16.6.1997 vahvistamaan pinomittausmenetelmän mittausohjeeseen. Ohjeessa esitettyä menetelmää sovelletaan
KUITUPUUN PINO- MITTAUS Ohje KUITUPUUN PINOMITTAUS Ohje perustuu maa- ja metsätalousministeriön 16.6.1997 vahvistamaan pinomittausmenetelmän mittausohjeeseen. Ohjeessa esitettyä menetelmää sovelletaan
1/6 TEKNIIKKA JA LIIKENNE FYSIIKAN LABORATORIO V1.31 9.2011
 1/6 333. SÄDEOPTIIKKA JA FOTOMETRIA A. INSSIN POTTOVÄIN JA TAITTOKYVYN MÄÄRITTÄMINEN 1. Työn tavoite. Teoriaa 3. Työn suoritus Työssä perehdytään valon kulkuun väliaineissa ja niiden rajapinnoissa sädeoptiikan
1/6 333. SÄDEOPTIIKKA JA FOTOMETRIA A. INSSIN POTTOVÄIN JA TAITTOKYVYN MÄÄRITTÄMINEN 1. Työn tavoite. Teoriaa 3. Työn suoritus Työssä perehdytään valon kulkuun väliaineissa ja niiden rajapinnoissa sädeoptiikan
x 5 15 x 25 10x 40 11x x y 36 y sijoitus jompaankumpaan yhtälöön : b)
") MAA4 ratkaisut. 5 a) Itseisarvon vastauksen pitää olla aina positiivinen, joten määritelty kun 5 0 5 5 tai ( ) 5 5 5 5 0 5 5 5 5 0 5 5 0 0 9 5 9 40 5 5 5 5 0 40 5 Jälkimmäinen vastaus ei toimi määrittelyjoukon
MAA4 ratkaisut. 5 a) Itseisarvon vastauksen pitää olla aina positiivinen, joten määritelty kun 5 0 5 5 tai ( ) 5 5 5 5 0 5 5 5 5 0 5 5 0 0 9 5 9 40 5 5 5 5 0 40 5 Jälkimmäinen vastaus ei toimi määrittelyjoukon
Vektorien pistetulo on aina reaaliluku. Esimerkiksi vektorien v = (3, 2, 0) ja w = (1, 2, 3) pistetulo on
 ja w = (1, 2, 3) pistetulo on") 13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
3 TOISEN ASTEEN POLYNOMIFUNKTIO
 3 TOISEN ASTEEN POLYNOMIFUNKTIO POHDITTAVAA 1. Kuvasta voidaan arvioida, että frisbeegolfkiekko käy noin 9 metrin korkeudella ja se lentää noin 40 metrin päähän. Vastaus: Frisbeegolfkiekko käy n. 9 m:n
3 TOISEN ASTEEN POLYNOMIFUNKTIO POHDITTAVAA 1. Kuvasta voidaan arvioida, että frisbeegolfkiekko käy noin 9 metrin korkeudella ja se lentää noin 40 metrin päähän. Vastaus: Frisbeegolfkiekko käy n. 9 m:n
7.4 PERUSPISTEIDEN SIJAINTI
 67 7.4 PERUSPISTEIDEN SIJAINTI Optisen systeemin peruspisteet saadaan systeemimatriisista. Käytetään seuraavan kuvan merkintöjä: Kuvassa sisäänmenotaso on ensimmäisen linssin ensimmäisessä pinnassa eli
67 7.4 PERUSPISTEIDEN SIJAINTI Optisen systeemin peruspisteet saadaan systeemimatriisista. Käytetään seuraavan kuvan merkintöjä: Kuvassa sisäänmenotaso on ensimmäisen linssin ensimmäisessä pinnassa eli
Grä sbö len tuulivöimähänke: Kuväsövitteet
 Grä sbö len tuulivöimähänke: Kuväsövitteet 1. Yleistä: Kaikissa kuvasovitteissa on käytetty tuulivoimalatyyppiä Nordex N117 2.4 MW. Napakorkeus: 141 m Lavan pituus: 58,5 m Roottorin halkaisija: 117 m Menetelmä:
Grä sbö len tuulivöimähänke: Kuväsövitteet 1. Yleistä: Kaikissa kuvasovitteissa on käytetty tuulivoimalatyyppiä Nordex N117 2.4 MW. Napakorkeus: 141 m Lavan pituus: 58,5 m Roottorin halkaisija: 117 m Menetelmä:
Tekijä Pitkä matematiikka Pisteen (x, y) etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.
 etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.") Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
Luento 3: 3D katselu. Sisältö
 Tietokonegrafiikan perusteet T-.43 3 op Luento 3: 3D katselu Lauri Savioja Janne Kontkanen /27 3D katselu / Sisältö Kertaus: koordinaattimuunnokset ja homogeeniset koordinaatit Näkymänmuodostus Kameran
Tietokonegrafiikan perusteet T-.43 3 op Luento 3: 3D katselu Lauri Savioja Janne Kontkanen /27 3D katselu / Sisältö Kertaus: koordinaattimuunnokset ja homogeeniset koordinaatit Näkymänmuodostus Kameran
Luento 1 Fotogrammetria prosessina Maa Fotogrammetrian perusteet 1
 Luento 1 Fotogrammetria prosessina. 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Maa-57.1030 Fotogrammetrian perusteet (3 op) Sisältyy geomatiikan koulutusohjelman perusmoduuliin A1. Kurssin kuvaus Stereofotogrammetria.
Luento 1 Fotogrammetria prosessina. 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Maa-57.1030 Fotogrammetrian perusteet (3 op) Sisältyy geomatiikan koulutusohjelman perusmoduuliin A1. Kurssin kuvaus Stereofotogrammetria.
Yhtälön oikealla puolella on säteen neliö, joten r. = 5 eli r = ± 5. Koska säde on positiivinen, niin r = 5.
 Tekijä Pitkä matematiikka 5 7..017 31 Kirjoitetaan yhtälö keskipistemuotoon ( x x ) + ( y y ) = r. 0 0 a) ( x 4) + ( y 1) = 49 Yhtälön vasemmalta puolelta nähdään, että x 0 = 4 ja y 0 = 1, joten ympyrän
Tekijä Pitkä matematiikka 5 7..017 31 Kirjoitetaan yhtälö keskipistemuotoon ( x x ) + ( y y ) = r. 0 0 a) ( x 4) + ( y 1) = 49 Yhtälön vasemmalta puolelta nähdään, että x 0 = 4 ja y 0 = 1, joten ympyrän
LIITE 1 VIRHEEN ARVIOINNISTA
 1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
Tekijä Pitkä matematiikka Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4).
, ( 2,1), (1, 0), (4, 1) ja ( 11, 4).") Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
LIITE 1 VIRHEEN ARVIOINNISTA
 Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Riemannin pintojen visualisoinnista
 Riemannin pintojen visualisoinnista eli Funktioiden R R kuvaajat Simo K. Kivelä 7.7.6 Tarkastelun kohteena olkoon kompleksimuuttujan kompleksiarvoinen funktio f : C C, f(z) = w eli f(x + iy) = u(x, y)
Riemannin pintojen visualisoinnista eli Funktioiden R R kuvaajat Simo K. Kivelä 7.7.6 Tarkastelun kohteena olkoon kompleksimuuttujan kompleksiarvoinen funktio f : C C, f(z) = w eli f(x + iy) = u(x, y)
Työ 2324B 4h. VALON KULKU AINEESSA
 TURUN AMMATTIKORKEAKOULU TYÖOHJE 1/5 Työ 2324B 4h. VALON KULKU AINEESSA TYÖN TAVOITE Työssä perehdytään optisiin ilmiöihin tutkimalla valon kulkua linssisysteemeissä ja prismassa. Tavoitteena on saada
TURUN AMMATTIKORKEAKOULU TYÖOHJE 1/5 Työ 2324B 4h. VALON KULKU AINEESSA TYÖN TAVOITE Työssä perehdytään optisiin ilmiöihin tutkimalla valon kulkua linssisysteemeissä ja prismassa. Tavoitteena on saada
Luento 2: Stereoskopia
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 2: Stereoskopia AIHEITA (Alkuperäinen luento: Henrik Haggrén, 3.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004)
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 2: Stereoskopia AIHEITA (Alkuperäinen luento: Henrik Haggrén, 3.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004)
LIITE 1 VIRHEEN ARVIOINNISTA
 1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
Suorat ja tasot, L6. Suuntajana. Suora xy-tasossa. Suora xyzkoordinaatistossa. Taso xyzkoordinaatistossa. Tason koordinaattimuotoinen yhtälö.
 Suorat ja tasot, L6 Suora xyz-koordinaatistossa Taso xyz-koordinaatistossa stä stä 1 Näillä kalvoilla käsittelemme kolmen laisia olioita. Suora xyz-avaruudessa. Taso xyz-avaruudessa. Emme nyt ryhdy pohtimaan,
Suorat ja tasot, L6 Suora xyz-koordinaatistossa Taso xyz-koordinaatistossa stä stä 1 Näillä kalvoilla käsittelemme kolmen laisia olioita. Suora xyz-avaruudessa. Taso xyz-avaruudessa. Emme nyt ryhdy pohtimaan,
Nimi: Muiden ryhmäläisten nimet:
 Nimi: Muiden ryhmäläisten nimet: PALKKIANTURI Työssä tutustutaan palkkianturin toimintaan ja havainnollistetaan sen avulla pienten ainepitoisuuksien havainnointia. Työn mittaukset on jaettu kolmeen osaan,
Nimi: Muiden ryhmäläisten nimet: PALKKIANTURI Työssä tutustutaan palkkianturin toimintaan ja havainnollistetaan sen avulla pienten ainepitoisuuksien havainnointia. Työn mittaukset on jaettu kolmeen osaan,
Stereopaikannusjärjestelmän tarkkuus (3 op)
") Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Kuva 1: Funktion f tasa-arvokäyriä. Ratkaisu. Suurin kasvunopeus on gradientin suuntaan. 6x 0,2
 HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi I, syksy 018 Harjoitus Ratkaisuehdotukset Tehtävä 1. Olkoon f : R R f(x 1, x ) = x 1 + x Olkoon C R. Määritä tasa-arvojoukko Sf(C) = {(x 1, x
HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi I, syksy 018 Harjoitus Ratkaisuehdotukset Tehtävä 1. Olkoon f : R R f(x 1, x ) = x 1 + x Olkoon C R. Määritä tasa-arvojoukko Sf(C) = {(x 1, x
MAA-C2001 Ympäristötiedon keruu
 MAA-C2001 Ympäristötiedon keruu Luento 1b Petri Rönnholm, Aalto-yliopisto 1 Laserkeilauksen, fotogrammetrian ja kaukokartoituksen harjoituksista Laserkeilausharjoitus Tarkempi aikataulu julkaistaan lähiaikoina
MAA-C2001 Ympäristötiedon keruu Luento 1b Petri Rönnholm, Aalto-yliopisto 1 Laserkeilauksen, fotogrammetrian ja kaukokartoituksen harjoituksista Laserkeilausharjoitus Tarkempi aikataulu julkaistaan lähiaikoina
Tämä luku nojaa vahvasti esimerkkeihin. Aloitetaan palauttamalla mieleen, mitä koordinaatistolla tarkoitetaan.
 MAB: Koordinaatisto geometrian apuna Aluksi Geometriassa tulee silloin tällöin eteen tilanne, jossa piirroksen tekeminen koordinaatistoon yksinkertaistaa laskuja. Toisinaan taas tilanne on muuten vaan
MAB: Koordinaatisto geometrian apuna Aluksi Geometriassa tulee silloin tällöin eteen tilanne, jossa piirroksen tekeminen koordinaatistoon yksinkertaistaa laskuja. Toisinaan taas tilanne on muuten vaan
MATEMATIIKAN KOE, LYHYT OPPIMÄÄRÄ 24.9.2014 HYVÄN VASTAUKSEN PIIRTEITÄ
 MATEMATIIKAN KOE, LYHYT OPPIMÄÄRÄ 4.9.04 HYVÄN VASTAUKSEN PIIRTEITÄ Alla oleva vastausten piirteiden, sisältöjen ja pisteitysten luonnehdinta ei sido ylioppilastutkintolautakunnan arvostelua. Lopullisessa
MATEMATIIKAN KOE, LYHYT OPPIMÄÄRÄ 4.9.04 HYVÄN VASTAUKSEN PIIRTEITÄ Alla oleva vastausten piirteiden, sisältöjen ja pisteitysten luonnehdinta ei sido ylioppilastutkintolautakunnan arvostelua. Lopullisessa
yleisessä muodossa x y ax by c 0. 6p
 MAA..0 Muista kirjoittaa jokaiseen paperiin nimesi! Tee vastauspaperin yläreunaan pisteytysruudukko! Valitse kuusi tehtävää! Perustele vastauksesi välivaiheilla! Jussi Tyni Ratkaise: a) x x b) xy x 6y
MAA..0 Muista kirjoittaa jokaiseen paperiin nimesi! Tee vastauspaperin yläreunaan pisteytysruudukko! Valitse kuusi tehtävää! Perustele vastauksesi välivaiheilla! Jussi Tyni Ratkaise: a) x x b) xy x 6y
1 ENSIMMÄISEN ASTEEN POLYNOMIFUNKTIO
 1 ENSIMMÄISEN ASTEEN POLYNOMIFUNKTIO POHDITTAVAA 1. Lämpötila maanpinnalla nähdään suoran ja y-akselin leikkauspisteen y- koordinaatista, joka on noin 10. Kun syvyys on 15 km, nähdään suoralta, että lämpötila
1 ENSIMMÄISEN ASTEEN POLYNOMIFUNKTIO POHDITTAVAA 1. Lämpötila maanpinnalla nähdään suoran ja y-akselin leikkauspisteen y- koordinaatista, joka on noin 10. Kun syvyys on 15 km, nähdään suoralta, että lämpötila
Valitse vain kuusi tehtävää! Tee etusivun yläreunaan pisteytysruudukko! Kaikkiin tehtäviin tarvittavat välivaiheet esille!
 5.4.013 Jussi Tyni 1. Selitä ja piirrä seuraavat lyhyesti: a) Kehäkulma ja keskikulma b) Todista, että kolmion kulmien summa on 180 astetta. Selitä päätelmiesi perustelut.. a) Suorakulmaisen kolmion kateetit
5.4.013 Jussi Tyni 1. Selitä ja piirrä seuraavat lyhyesti: a) Kehäkulma ja keskikulma b) Todista, että kolmion kulmien summa on 180 astetta. Selitä päätelmiesi perustelut.. a) Suorakulmaisen kolmion kateetit
Tampereen yliopisto Tietokonegrafiikka 2013 Tietojenkäsittelytiede Harjoitus
 Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
Grä sbö len tuulivöimähänke: Kuväsövitteet
 Grä sbö len tuulivöimähänke: Kuväsövitteet 1. Yleistä: Kaikissa kuvasovitteissa on käytetty tuulivoimalatyyppiä Enercon E101 3MW. Napakorkeus: 135,4 m Lavan pituus: 50,5 m Roottorin halkaisija: 101 m Menetelmä:
Grä sbö len tuulivöimähänke: Kuväsövitteet 1. Yleistä: Kaikissa kuvasovitteissa on käytetty tuulivoimalatyyppiä Enercon E101 3MW. Napakorkeus: 135,4 m Lavan pituus: 50,5 m Roottorin halkaisija: 101 m Menetelmä:
MAB3 - Harjoitustehtävien ratkaisut:
 MAB - Harjoitustehtävien ratkaisut: Funktio. Piirretään koordinaatistoakselit ja sijoitetaan pisteet:. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä. Funktiolla
MAB - Harjoitustehtävien ratkaisut: Funktio. Piirretään koordinaatistoakselit ja sijoitetaan pisteet:. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä. Funktiolla
 MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
RATKAISUT: 16. Peilit ja linssit
 Physica 9 1 painos 1(6) : 161 a) Kupera linssi on linssi, jonka on keskeltä paksumpi kuin reunoilta b) Kupera peili on peili, jossa heijastava pinta on kaarevan pinnan ulkopinnalla c) Polttopiste on piste,
Physica 9 1 painos 1(6) : 161 a) Kupera linssi on linssi, jonka on keskeltä paksumpi kuin reunoilta b) Kupera peili on peili, jossa heijastava pinta on kaarevan pinnan ulkopinnalla c) Polttopiste on piste,
Ratkaisu: Maksimivalovoiman lauseke koostuu heijastimen maksimivalovoimasta ja valonlähteestä suoraan (ilman heijastumista) tulevasta valovoimasta:
 tulevasta valovoimasta:") LASKUHARJOITUS 1 VALAISIMIEN OPTIIKKA Tehtävä 1 Pistemäinen valonlähde (Φ = 1000 lm, valokappaleen luminanssi L = 2500 kcd/m 2 ) sijoitetaan 15 cm suuruisen pyörähdysparaboloidin muotoisen peiliheijastimen
LASKUHARJOITUS 1 VALAISIMIEN OPTIIKKA Tehtävä 1 Pistemäinen valonlähde (Φ = 1000 lm, valokappaleen luminanssi L = 2500 kcd/m 2 ) sijoitetaan 15 cm suuruisen pyörähdysparaboloidin muotoisen peiliheijastimen
Tekijä Pitkä matematiikka
 Tekijä Pitkä matematiikka 5..017 110 Valitaan suoralta kaksi pistettä ja piirretään apukolmio, josta koordinaattien muutokset voidaan lukea. Vaakasuoran suoran kulmakerroin on nolla. y Suoran a kulmakerroin
Tekijä Pitkä matematiikka 5..017 110 Valitaan suoralta kaksi pistettä ja piirretään apukolmio, josta koordinaattien muutokset voidaan lukea. Vaakasuoran suoran kulmakerroin on nolla. y Suoran a kulmakerroin
Teoreettisia perusteita I
 Teoreettisia perusteita I - fotogrammetrinen mittaaminen perustuu pitkälti kollineaarisuusehtoon, jossa pisteestä heijastuva valonsäde kulkee suoraan projektiokeskuksen kautta kuvatasolle - toisaalta kameran
Teoreettisia perusteita I - fotogrammetrinen mittaaminen perustuu pitkälti kollineaarisuusehtoon, jossa pisteestä heijastuva valonsäde kulkee suoraan projektiokeskuksen kautta kuvatasolle - toisaalta kameran
Jakso 8. Ampèren laki. B-kentän kenttäviivojen piirtäminen
 Jakso 8. Ampèren laki Esimerkki 8.: Johda pitkän suoran virtajohtimen (virta ) aiheuttaman magneettikentän lauseke johtimen ulkopuolella etäisyydellä r johtimesta. Ratkaisu: Käytetään Ampèren lakia C 0
Jakso 8. Ampèren laki Esimerkki 8.: Johda pitkän suoran virtajohtimen (virta ) aiheuttaman magneettikentän lauseke johtimen ulkopuolella etäisyydellä r johtimesta. Ratkaisu: Käytetään Ampèren lakia C 0
KERTAUS KERTAUSTEHTÄVIÄ K1. P( 1) = 3 ( 1) + 2 ( 1) ( 1) 3 = = 4
 = 3 ( 1) + 2 ( 1) ( 1) 3 = = 4") KERTAUS KERTAUSTEHTÄVIÄ K1. P( 1) = 3 ( 1) + ( 1) + 3 ( 1) 3 = 3 + 3 = 4 K. a) x 3x + 7x 5x = 4x + 4x b) 5x 3 (1 x ) = 5x 3 1 + x = 6x 4 c) (x + 3)(x 4) = x 3 4x + 3x 1 = x 3 + 3x 4x 1 Vastaus: a) 4x +
KERTAUS KERTAUSTEHTÄVIÄ K1. P( 1) = 3 ( 1) + ( 1) + 3 ( 1) 3 = 3 + 3 = 4 K. a) x 3x + 7x 5x = 4x + 4x b) 5x 3 (1 x ) = 5x 3 1 + x = 6x 4 c) (x + 3)(x 4) = x 3 4x + 3x 1 = x 3 + 3x 4x 1 Vastaus: a) 4x +
Pinta-alojen ja tilavuuksien laskeminen 1/6 Sisältö ESITIEDOT: määrätty integraali
 Pinta-alojen ja tilavuuksien laskeminen 1/6 Sisältö ESITIEDOT: Tasoalueen pinta-ala Jos funktio f saa välillä [a, b] vain ei-negatiivisia arvoja, so. f() 0, kun [a, b], voidaan kuvaajan y = f(), -akselin
Pinta-alojen ja tilavuuksien laskeminen 1/6 Sisältö ESITIEDOT: Tasoalueen pinta-ala Jos funktio f saa välillä [a, b] vain ei-negatiivisia arvoja, so. f() 0, kun [a, b], voidaan kuvaajan y = f(), -akselin
6. Etäisyydenmittari 14.
 97 ilmeisessä käsirysyssä vihollisen kanssa. Yleensä etäiyyden ollessa 50 m. pienempi voi sen käyttämisestä odottaa varmaa menestystä; paras etäisyys on 25 m. tai sitä pienempi. Sillä missä tilanahtaus
97 ilmeisessä käsirysyssä vihollisen kanssa. Yleensä etäiyyden ollessa 50 m. pienempi voi sen käyttämisestä odottaa varmaa menestystä; paras etäisyys on 25 m. tai sitä pienempi. Sillä missä tilanahtaus
1. STEREOKUVAPARIN OTTAMINEN ANAGLYFIKUVIA VARTEN. Hyvien stereokuvien ottaminen edellyttää kahden perusasian ymmärtämistä.
 3-D ANAGLYFIKUVIEN TUOTTAMINEN Fotogrammetrian ja kaukokartoituksen laboratorio Teknillinen korkeakoulu Petri Rönnholm Perustyövaiheet: A. Ota stereokuvapari B. Poista vasemmasta kuvasta vihreä ja sininen
3-D ANAGLYFIKUVIEN TUOTTAMINEN Fotogrammetrian ja kaukokartoituksen laboratorio Teknillinen korkeakoulu Petri Rönnholm Perustyövaiheet: A. Ota stereokuvapari B. Poista vasemmasta kuvasta vihreä ja sininen
Kertaus. x x x. K1. a) b) x 5 x 6 = x 5 6 = x 1 = 1 x, x 0. K2. a) a a a a, a > 0
 b) x 5 x 6 = x 5 6 = x 1 = 1 x, x 0. K2. a) a a a a, a > 0") Juuri 8 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 8.9.07 Kertaus K. a) 6 4 64 0, 0 0 0 0 b) 5 6 = 5 6 = =, 0 c) d) K. a) b) c) d) 4 4 4 7 4 ( ) 7 7 7 7 87 56 7 7 7 6 6 a a a, a > 0 6 6 a
Juuri 8 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 8.9.07 Kertaus K. a) 6 4 64 0, 0 0 0 0 b) 5 6 = 5 6 = =, 0 c) d) K. a) b) c) d) 4 4 4 7 4 ( ) 7 7 7 7 87 56 7 7 7 6 6 a a a, a > 0 6 6 a
Avaruuden kolme sellaista pistettä, jotka eivät sijaitse samalla suoralla, määräävät
 11 Taso Avaruuden kolme sellaista pistettä, jotka eivät sijaitse samalla suoralla, määräävät tason. Olkoot nämä pisteet P, B ja C. Merkitään vaikkapa P B r ja PC s. Tällöin voidaan sanoa, että vektorit
11 Taso Avaruuden kolme sellaista pistettä, jotka eivät sijaitse samalla suoralla, määräävät tason. Olkoot nämä pisteet P, B ja C. Merkitään vaikkapa P B r ja PC s. Tällöin voidaan sanoa, että vektorit
Luento 1 Koko joukko kuvia! Moniulotteiset kuvat Maa Johdanto valokuvaukseen, fotogrammetriaan ja kaukokartoitukseen
 Luento 1 Koko joukko kuvia! Moniulotteiset kuvat. 1 Maa-57.1010 Johdanto valokuvaukseen, fotogrammetriaan ja kaukokartoitukseen (4op) Sisältyy maanmittausosaston geomatiikan koulutusohjelman O-moduuliin.
Luento 1 Koko joukko kuvia! Moniulotteiset kuvat. 1 Maa-57.1010 Johdanto valokuvaukseen, fotogrammetriaan ja kaukokartoitukseen (4op) Sisältyy maanmittausosaston geomatiikan koulutusohjelman O-moduuliin.
Suora 1/5 Sisältö ESITIEDOT: vektori, koordinaatistot, piste
 Suora 1/5 Sisältö KATSO MYÖS:, vektorialgebra, geometriset probleemat, taso Suora geometrisena peruskäsitteenä Pisteen ohella suora on geometrinen peruskäsite, jota varsinaisesti ei määritellä. Alkeisgeometriassa
Suora 1/5 Sisältö KATSO MYÖS:, vektorialgebra, geometriset probleemat, taso Suora geometrisena peruskäsitteenä Pisteen ohella suora on geometrinen peruskäsite, jota varsinaisesti ei määritellä. Alkeisgeometriassa
c) Määritä paraabelin yhtälö, kun tiedetään, että sen huippu on y-akselilla korkeudella 6 ja sen nollakohdat ovat x-akselin kohdissa x=-2 ja x=2.
 Määritä paraabelin yhtälö, kun tiedetään, että sen huippu on y-akselilla korkeudella 6 ja sen nollakohdat ovat x-akselin kohdissa x=-2 ja x=2.") MAA4 Koe 5.5.01 Jussi Tyni Kaikkiin tehtäviin ratkaisujen välivaiheet näkyviin! Ota kokeesta poistuessasi tämä paperi mukaasi! Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Valitse
MAA4 Koe 5.5.01 Jussi Tyni Kaikkiin tehtäviin ratkaisujen välivaiheet näkyviin! Ota kokeesta poistuessasi tämä paperi mukaasi! Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Valitse
Luento 4: Kolmiointihavainnot
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 2: Usean muuttujan funktiot
 Luento 2: Usean muuttujan funktiot") MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 2: Usean muuttujan funktiot Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 2016 Antti Rasila (Aalto-yliopisto)
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 2: Usean muuttujan funktiot Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 2016 Antti Rasila (Aalto-yliopisto)
Kokeile kuvasuunnistusta. 3D:nä
 Kokeile kuvasuunnistusta 3D:nä Oheinen 3D-kuvasuunnistus on julkaistu Suunnistaja-lehdessä 1/13. Tämä kuvasuunnistus on toteutettu tarkkuussuunnistuksen aikarastitehtävän mukaisesti. Aikarastilla kartta
Kokeile kuvasuunnistusta 3D:nä Oheinen 3D-kuvasuunnistus on julkaistu Suunnistaja-lehdessä 1/13. Tämä kuvasuunnistus on toteutettu tarkkuussuunnistuksen aikarastitehtävän mukaisesti. Aikarastilla kartta
Suorakulmainen kolmio
 Suorakulmainen kolmio 1. Määritä terävä kulma α, β ja γ, kun sinα = 0,5782, cos β = 0,745 ja tanγ = 1,222. π 2. Määritä trigonometristen funktioiden sini, kosini ja tangentti, kun kulma α = ja 3 β = 73,2
Suorakulmainen kolmio 1. Määritä terävä kulma α, β ja γ, kun sinα = 0,5782, cos β = 0,745 ja tanγ = 1,222. π 2. Määritä trigonometristen funktioiden sini, kosini ja tangentti, kun kulma α = ja 3 β = 73,2
Mittausten suunnittelu I
 Mittausten suunnittelu I Eteenpäinleikkaukseen perustuvan mittauksen tarkkuus riippuu kahdesta asiasta (C.S. Fraser, 1996): 1) kuvaus-/tähtäyssäteen määritystarkkuudesta 2) kuvausgeometriasta Saavutettavaa
Mittausten suunnittelu I Eteenpäinleikkaukseen perustuvan mittauksen tarkkuus riippuu kahdesta asiasta (C.S. Fraser, 1996): 1) kuvaus-/tähtäyssäteen määritystarkkuudesta 2) kuvausgeometriasta Saavutettavaa
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 23.2.2016 Susanna Hurme Tervetuloa kurssille! Mitä on statiikka? Mitä on dynamiikka? Miksi niitä opiskellaan? Päivän aihe: Voiman käsite ja partikkelin tasapaino
KJR-C1001 Statiikka ja dynamiikka Luento 23.2.2016 Susanna Hurme Tervetuloa kurssille! Mitä on statiikka? Mitä on dynamiikka? Miksi niitä opiskellaan? Päivän aihe: Voiman käsite ja partikkelin tasapaino
MAA7 Kurssikoe Jussi Tyni Tee B-osion konseptiin pisteytysruudukko! Kaikkiin tehtäviin välivaiheet näkyviin! Laske huolellisesti!
 A-osio: ilman laskinta. MAOLia saa käyttää. Laske kaikki tehtävistä 1-. 1. a) Derivoi funktio f(x) = x (4x x) b) Osoita välivaiheiden avulla, että seuraava raja-arvo -lauseke on tosi tai epätosi: x lim
A-osio: ilman laskinta. MAOLia saa käyttää. Laske kaikki tehtävistä 1-. 1. a) Derivoi funktio f(x) = x (4x x) b) Osoita välivaiheiden avulla, että seuraava raja-arvo -lauseke on tosi tai epätosi: x lim
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 24.2.2016 Susanna Hurme Päivän aihe: Voiman momentin käsite (Kirjan luvut 4.1-4.6) Mikä on voiman momentti? Määritetään momentti skalaari- ja vektorimuodossa Opitaan
KJR-C1001 Statiikka ja dynamiikka Luento 24.2.2016 Susanna Hurme Päivän aihe: Voiman momentin käsite (Kirjan luvut 4.1-4.6) Mikä on voiman momentti? Määritetään momentti skalaari- ja vektorimuodossa Opitaan