Luento 5. Stereomittauksen tarkkuus Maa Fotogrammetrian perusteet 1
|
|
|
- Emma Aho
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
1 Luento 5 Stereomittauksen tarkkuus 2008 Maa Fotogrammetrian perusteet 1
2 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin deformaatiot sterokuvan plastiikka * Huom! Stereokuvaus käsittää tässä merkityksessä sekä tiedonkeruun, sen käsittelyn ja esittämisen Maa Fotogrammetrian perusteet 2
3 Stereomittauksen tarkkuuteen vaikuttavia tekijöitä Kuvakoko Kuvakulma Kuvan terävyys Kuvanoton kuvakanta Stereotarkastelun suurennussuhde Stereotarkastelun kuvakanta Kuvaparin keskinäinen orientointi > Stereomallin deformaatio 2008 Maa Fotogrammetrian perusteet 3
4 Optimaalinen kuvausgeometria 2008 Maa Fotogrammetrian perusteet 4
5 Etäisyysmittauksen epätarkkuus I Etäisyysmittauksen tarkkuus stereokuvauksen normaalitapauksessa on suoraan verrannollinen kuvan mittakaavaan, ja parallaksieron mittaustarkkuuteen, ja kääntäen verrannollinen kantasuhteeseen Maa Fotogrammetrian perusteet 5
6 Etäisyysmittauksen epätarkkuus II 2008 Maa Fotogrammetrian perusteet 6
7 Kuvakannan suuruus Kannan suuruus riippuu kuvausetäisyydestä ja stereokuvien käyttötarkoituksesta. Pelkkään stereotarkasteluun tarkoitetuilla kuvilla kanta voi vaihdella lähes olemattomasta, siis muutamasta sentistä, ehkä enimmillään yhteen metriin. Mittaus- ja kartoituskuvauksissa kuvakanta on pidempi, koska syvyysmittauksen tarkkuutta halutaan korostaa. Ilmakuvilla kanta voi olla jopa puolet kuvausetäisyydestä Maa Fotogrammetrian perusteet 7
8 Stereomallin ulkoinen orientointi I Kuvapari voidaan aina orientoida stereomalliksi, jossa sitä tulkitaan ja mitataan omassa 3-D koordinaatistossaan. Käytännössä havainnot muunnetaan myös kohteen kartoituskoordinaatistoon. Malli- ja kohdekoordinaatiston välinen muunnos ratkaistaan ulkoisella orientoinnilla Maa Fotogrammetrian perusteet 8
9 Stereomallin ulkoinen orientointi II Muunnos on useimmiten kohtisuora yhdenmuotoismuunnos ja sisältää seitsemän muuttujaa eli mittakaavan korjauksen, kolme siirtoa, ja kolme kiertoa. Näitä ei voi havaita suoraan vaan ainoastaan välillisesti muunnospisteiden avulla. Muunnoksen edellytyksenä on, että stereomallilta on havaittu vähintään kolme sellaista pistettä, joiden koordinaatit tunnetaan myös kohdekoordinaatistossa Maa Fotogrammetrian perusteet 9
10 Stereomallin ulkoinen orientointi III Käytännössä muunnospisteitä eli n.s. tukipisteitä on enemmän. Joissakin erikoistapauksissa mallikoordinaatisto on vino. Tällöin muunnos tehdään projektiivisesti ja muunnoksessa on 15 muuttujaa, kolme mittakaavaa, kolme siirtoa ja 3x3 kiertoa Maa Fotogrammetrian perusteet 10
11 Stereomallin ulkoinen orientointi IV Stereomallin ulkoisessa orientoinnissa on aina tärkeää, että muunnokseen voidaan käyttää enemmän tukipisteitä kuin edellä mainitut kolme. Tukipisteitä saadaan sekä kohteella tehdyin mittauksin että fotogrammetrisesti kolmioimalla. Kolmioinnissa mallit ja kuvat orientoidaan ensin toisiinsa kuvablokiksi ja kuvablokki muunnetaan kohdekoordinaatistoon (blokkikolmiointi). Pelkät kohteella mitatut tukipisteet tulevat kysymykseen lähinnä silloin, kun on kyse yksittäisen stereomallin orientoimisesta Maa Fotogrammetrian perusteet 11

12 Muunnospisteet Muunnoksen edellytyksenä on, että stereomallilta on havaittu vähintään kolme sellaista pistettä, joiden koordinaatit tunnetaan myös kohdekoordinaatistossa. Käytännössä muunnospisteitä eli n.s. tukipisteitä on enemmän Maa Fotogrammetrian perusteet 12
13 Muunnospisteet 2008 Maa Fotogrammetrian perusteet 13
14 Mittakaava ja kierto 2008 Maa Fotogrammetrian perusteet 14
15 Kallistus vaakatasoon 2008 Maa Fotogrammetrian perusteet 15
16 Orientoinnin laskeminen Muunnospisteiden kohdekoordinaatit Mittakaava ja kierrot Origon siirto Stereomallilta havaitut koordinaatit 1. Virheyhtälöiden muodostaminen Origon siirto = muunnospisteiden painopisteiden koordinaattiero 2008 Maa Fotogrammetrian perusteet 16
17 Likiarvot Parannukset Mallin ulkoinen orientointiiv 2. Kiertomatriisin linearisointi Ratkaisua iteroidaan, kunnes likiarvoja ei käytännössä enään saada parannettua. Muunnospisteiden jäännösvirheistä arvioidaan se, miten hyvin orientointi näillä havainnoilla onnistui. Parannuksilla korjatut likiarvot 2008 Maa Fotogrammetrian perusteet 17
18 Stereomallin ulkoinen orientointi IV Stereomallin ulkoisessa orientoinnissa on aina tärkeää, että muunnokseen voidaan käyttää enemmän tukipisteitä kuin edellä mainitut kolme. Pelkät kohteella mitatut tukipisteet tulevat kysymykseen lähinnä silloin, kun on kyse yksittäisen stereomallin orientoimisesta Maa Fotogrammetrian perusteet 18
19 Kuvien ulkoinen orientointi Stereomallin keskinäinen ja ulkoinen orientointi voidaan korvata kummallekin kuvalle erikseen tehdyllä yhden kuvan ulkoisella orientoinnilla. Ulkoinen orientointi sisältyy blokkikolmiointiin. Kolmioinnissa mallit ja kuvat orientoidaan ensin toisiinsa kuvablokiksi ja kuvablokki muunnetaan kohdekoordinaatistoon Maa Fotogrammetrian perusteet 19




20 Tukipisteiden mittaus Tukipisteitä saadaan sekä kohteella tehdyin mittauksin että fotogrammetrisesti kolmioimalla Maa Fotogrammetrian perusteet 20
21 Stereomallin deformaatio I Koska kohteen yksityiskohtainen kartoitus perustuu viime kädessä stereomallin tulkintaan ja siitä tehtyihin mittauksiin, on tärkeää, että malli on oikean muotoinen. Vaikka sisäinen ja keskinäinen orientointi tehdään tarkasti, jokainen stereomalli deformoituu orientointien jäännösvirheistä. Ulkoisen orientoinnin toisena tehtävänä onkin - koordinaatistomuunnoksen lisäksi - antaa käsitys tämän deformaation suuruudesta Maa Fotogrammetrian perusteet 21
22 Stereomallin deformaatio II Mallideformaatioiden luonnetta tarkastellaan virheitä simuloimalla. Osa virheistä on lineaarisia, ja ne kompensoituvat ulkoisen orientoinnin aikana. Osa virheistä on epälineaarisia, ja niiden vaikutusta hallitaan sijoittamalla ylimääräisiä tukipisteitä virheiden kannalta kriittisille stereomallin alueille Maa Fotogrammetrian perusteet 22

23 Mallideformaatio korkeusmallin vaihevirheenä Deformaatio näkyy korkeusmallissa stereomallien rajoilla karttalehdittäin 2008 Maa Fotogrammetrian perusteet 23
24 Esimerkki Kuva 01131_ _0082 gon degrees gon degrees kappa 0, , , ,00100 fii 0, , , ,00158 omega 0, , ,0034 0,00306 Model deformation 01131_ c = 152 mm Blokkikolmioinnin jälkeen voidaan kuvien orientointisuureiden keskivirheistä arvioida niiden vaikutusta korkeusmallin mahdolliseen deformoitumiseen. m 0,6 0,5 0,4 0,3 0,2 0, Maa Fotogrammetrian perusteet 24
25 Kulmavirheen vaikutus korkeuden virheeseen c 152 mm B 2850,789 m h 4710 m p 60 % px 92 mm m 30986,84 S/s' dφ B 0,00281 degrees h φ 0,00281 degrees 4710 m 0,049 mrad 231 mm dh φ +dφ 231 mm 2008 Maa Fotogrammetrian perusteet 25
26 Stereomallin deformaatio III Lineaarisia Epälineaarisia 2008 Maa Fotogrammetrian perusteet 26
27 Stereomallin deformaatio III Jäännösparallaksi dp x voidaan johtaa näistä havainnoista keskinäisen orientoinnin yhteydessä esitellyillä projektiokaavoilla. Jäännösparallaksi vääristää mallin Z-koordinaatin ja sen myötä myös X- ja Y-koordinaatit. Tätä ilmiötä kutsutaan stereomallin deformoitumiseksi. Käytännön tilanteissa vääristymää ei voi nähdä ja orientointi on tarkistettava mittauksin. Tarkistusmittaukset sisältyvät stereomallin ulkoiseen orientointiin Maa Fotogrammetrian perusteet 27
28 Stereomallin deformaatio IV 2008 Maa Fotogrammetrian perusteet 28
29 Stereomallin deformaatio V Deformaation luonnetta voi havainnollistaa tasomaisella kohteella. Tarkastellaan jäännösparallaksin vaikutusta projektiotasolla ja valitaan tasoksi z = -c Maa Fotogrammetrian perusteet 29
30 Stereomallin deformaatio VI Jäännösparallaksin vaikutus z-koordinaattiin lasketaan etäisyydenmittauksen epätarkkuutena dz Maa Fotogrammetrian perusteet 30
31 Keskinäisen orientoinnin jäännösvirheiden vaikutus mallilta havaittuihin korkeuslukuihin eli z-koordinaatteihin 2008 Maa Fotogrammetrian perusteet 31
32 Vertailutaso 2008 Maa Fotogrammetrian perusteet 32

33 Lineaarinen deformaatio - kuvakannan pituusvirhe 2008 Maa Fotogrammetrian perusteet 33

34 Lineaarinen deformaatio - kameran korkeusvirhe 2008 Maa Fotogrammetrian perusteet 34

35 Lineaarinen deformaatio - kameran kiertyminen 2008 Maa Fotogrammetrian perusteet 35
36 Epälineaarinen deformaatio - kameran pitkittäiskallistus 2008 Maa Fotogrammetrian perusteet 36

37 Epälineaarinen deformaatio - kameran poikittaiskallistus Lentosuunta 2008 Maa Fotogrammetrian perusteet 37
38 Stereokuvan plastiikka I Keinotekoinen stereoskooppisen näkemisen illuusio voidaan saada aikaan kuvilla, jotka esittävät samaa kohdetta, mutta on projisoitu mielivaltaisen stereoskooppisen kannan päätepisteiden kautta. Käytettävän kannan pituus voi olla eri kuin silmien luonnollinen etäisyys eli etäisyyshavainnon voimakkuutta voidaan säätää. Myös kuvia suurentamalla ja pienentämällä voidaan muuttaa mielikuvaa havaituista etäisyyseroista Maa Fotogrammetrian perusteet 38
39 Stereokuvan plastiikka II Jos stereokuvaparin kuvanottovälin eli kannan pituus on n-kertainen kuvien tarkastelukannan pituuteen nähden ja kuvien suurennus on v-kertainen, niin voidaan laskea tarkastelun tai kojeen kokonaisplastiikan arvo: P = n*v 2008 Maa Fotogrammetrian perusteet 39
40 Stereokuvan plastiikka III Kokonaisplastiikkaa muuttamalla voidaan vaikuttaa kohteen etäisyyserojen tuntuun ja muodon havaitsemisen tarkkuuteen. Jos kokonaisplastiikka saa arvon 1, kohteen muoto vastaa kohteen luonnollista muotoa eli ilmakuvilla rakennukset näyttävät oikean korkuisilta, kun korkeutta verrataan rakennuksen kokoon sen vaakasuunnassa. Jos kokonaisplastiikka on kasvaa, rakennukset venyvät Maa Fotogrammetrian perusteet 40

41 Stereokuvan plastiikka IV 2008 Maa Fotogrammetrian perusteet 41
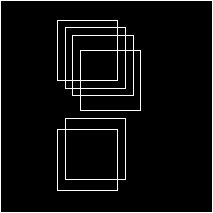
42 Stereokuvan plastiikka V Etäisyyserot vaikuttavat sitä suuremmilta mitä enemmän vastinkuvioiden välillä on parallaksia. Tässä vasemmat neliöt muodostavat vertaustason ja alin neliöpari vertausetäisyyden Maa Fotogrammetrian perusteet 42


43 Stereokuvan plastiikka VI 2008 Maa Fotogrammetrian perusteet 43
44 Stereokuvan plastiikka VII Ylempää neliösarjaa on jatkettu oikealle lisäämällä parallaksieroa ensin kaksinkertaiseksi ja lopuksi kolminkertaiseksi. Kun tätä kuvaparia katsotaan stereoskooppisesti, ylempien neliöiden etäisyyserot näyttävät myös kasvavan lineaarisesti, ensin kaksinkertaiseksi ja lopuksi kolminkertaiseksi Maa Fotogrammetrian perusteet 44
45 Stereokuvan plastiikka VIII Kyse on stereokuvan plastiikasta. Jos kuvakanta eli kuvanottopaikkojen välinen etäisyys kasvaa kaksinkertaiseksi, parallaksi kasvaa kaksinkertaiseksi. Koska tarkastelukanta eli silmäväli pysyy tässä esimerkissä samana, etäisyyserot korostuvat kaksinkertaisina Maa Fotogrammetrian perusteet 45


46 Stereokuvan plastiikka IX 2008 Maa Fotogrammetrian perusteet 46
47 Stereokuvan plastiikka X Stereokuvan plastiikkaa voidaan muuttaa myös kuvaa suurentamalla ja pienentämällä. Tässä pienempi neliöpari muodostaa vertausetäisyyden. Isommat neliöt on piirretty suurentamalla pienempi neliöpari kummallakin kuvalla kaksinkertaisiksi Maa Fotogrammetrian perusteet 47
48 Stereokuvan plastiikka XI Kun kuvaparia katsotaan stereoskooppisesti, neliöparin välinen etäisyys näyttää suurennoksen myötä kasvaneen kaksinkertaiseksi. Kuvan suurentaminen vaikuttaa parallakseihin. Koska tarkastelukanta pysyy samana, etäisyyserot korostuvat tässäkin kaksinkertaisina Maa Fotogrammetrian perusteet 48
49 Esimerkki I Maanmittauslaitos kuvaa maastotietokannan kartoituskuvaukset mittakaavaan 1 : 31'000. Kuvauskorkeus on 6500 m ja yhden kuvan kattama alue maastossa 7130 m x 7130 m. Kuvaus tehdään stereokuvauksena siten, että kuvat peittävät toisensa 60 %, joten kuvanottoväli on 2850 m Maa Fotogrammetrian perusteet 49
50 Esimerkki II Jos kuvia tarkastellaan paljain silmin stereoskooppisesti, stereovaikutelman kokonaisplastiikan arvoksi saadaan 1.4. n = 2850 / = v = 1 / p = n * v = 1.4 Tarkasteltavassa mallissa korkeuserot korostuvat 1.4-kertaisina vaakasuoriin eroihin nähden Maa Fotogrammetrian perusteet 50
51 Esimerkki III Ilman kuvakannan suurentamista stereovaikutelman kokonaisplastiikan arvoksi saataisiin 1 / Tämä vastaa suurin piirtein sitä vaikutelmaa, joka kohteen topografiasta näkyy, kun matkustaja tarkastelee sitä paljain silmin lentokoneesta 6500 metrin korkeudelta Maa Fotogrammetrian perusteet 51
52 Tehtävä Tehtävä Piirrä kuutio ja sen stereokuva. Piirrä sama kuutio, mutta muuta kokonaisplastiikkaa siten, että kuution korkeus on kaksinkertainen kuution vaakasivuun nähden Maa Fotogrammetrian perusteet 52
53 Stereomallin plastiikka 2008 Maa Fotogrammetrian perusteet 53

54 Stereodrome 2008 Maa Fotogrammetrian perusteet 54

55 Syvyysterävyys 2008 Maa Fotogrammetrian perusteet 55
56 Linssin syvyysterävyysalue Kuvan terävyyttä arvioidaan suureella c, joka on kuvalle kuvautuvan pisteen halkaisija. pa on fokusointietäisyys, pn ja pf tätä vastaavat terävänä kuvautumisen etu- ja takarajat. D on kameran aukkoluku ja f linssin polttoväli. ph on hyperfokaalietäisyys, jolle etäisyydelle fokusoitaessa kuva on terävä välillä pn Maa Fotogrammetrian perusteet 56
57 2008 Maa Fotogrammetrian perusteet 57
58 Stereoskooppinen syvyysnäkö Stereoscopic depth Z dz dp dz = x B c p = = x 1 B c Z c p 2 x Z dp B x Angular disparity Stereoscopic illusion dpx dφ = c Z Z dz = B dφ 2008 Maa Fotogrammetrian perusteet 58

59 Stereoscopic disparity by scaling B = 65 mm Angular disparities, with 0,5 pixels: Olympus Camedia SpheroCam 0, rad 0, rad f = 1400 pel f = 16 mm 2008 Maa Fotogrammetrian perusteet 59

60 Example Olympus E10 - Image size 3137 x 2084 pel - f = 3200 pel - B = 30 cm - Angular disparity 0, rad 2008 Maa Fotogrammetrian perusteet 60

61 Example, zoomed in at a distance of 35 m B = 30 cm 2008 Maa Fotogrammetrian perusteet 61
Luento 11: Stereomallin ulkoinen orientointi
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Luento 4 Georeferointi
 Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi Maa Fotogrammetrian perusteet 1
 Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 7 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 7: Fotogrammetrinen mittausprosessi
 7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
Luento 9 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 5: Stereoskooppinen mittaaminen
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Luento 2 Stereokuvan laskeminen. 2008 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 4 Kolmiulotteiset kuvat. fotogrammetriaan ja kaukokartoitukseen
 Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Luento 8: Kolmiointi AIHEITA. Kolmiointi. Maa-57.301 Fotogrammetrian yleiskurssi. Luento-ohjelma 1 2 3 4 5 6 7 8 9 10
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Luento 6: Stereo- ja jonomallin muodostaminen
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Luento 6: 3-D koordinaatit
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Luento 4 Kolmiulotteiset kuvat. fotogrammetriaan ja kaukokartoitukseen
 Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Luento 2: Stereoskopia
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 2: Stereoskopia AIHEITA (Alkuperäinen luento: Henrik Haggrén, 3.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004)
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 2: Stereoskopia AIHEITA (Alkuperäinen luento: Henrik Haggrén, 3.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004)
Luento 4: Kiertomatriisi
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Luento 3: Kuvahavainnot
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Luento 7: Kuvan ulkoinen orientointi
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Fotogrammetrian termistöä
 Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 7 Stereokartoituskojeet. 2007 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 7 Stereokartoituskojeet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2 Fotogrammetrinen prosessi 3 Stereokartoituskoje Stereokartoituskojeessa kuvaparin stereoskooppinen tarkastelu ja tarkka
Luento 7 Stereokartoituskojeet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2 Fotogrammetrinen prosessi 3 Stereokartoituskoje Stereokartoituskojeessa kuvaparin stereoskooppinen tarkastelu ja tarkka
(Petri Rönnholm / Henrik Haggrén, ) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot.
 Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot.") Maa-57.301 Fotogrammetrian yleiskurssi (Petri Rönnholm / Henrik Haggrén, 12.9.2005) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot. Mitä pitäisi oppia? Palauttaa
Maa-57.301 Fotogrammetrian yleiskurssi (Petri Rönnholm / Henrik Haggrén, 12.9.2005) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot. Mitä pitäisi oppia? Palauttaa
Luento 2: Kuvakoordinaattien mittaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 14.9.2005) Luento 2: Kuvakoordinaattien mittaus Mitä pitäisi oppia? Muunnokset informaatiokanavassa (osin kertausta) Erotella kuvaan ja
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 14.9.2005) Luento 2: Kuvakoordinaattien mittaus Mitä pitäisi oppia? Muunnokset informaatiokanavassa (osin kertausta) Erotella kuvaan ja
Teoreettisia perusteita II
 Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Luento 7 Stereokartoituskojeet Maa Fotogrammetrian perusteet 1
 Luento 7 Stereokartoituskojeet 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2008 Maa-57.1030 Fotogrammetrian perusteet 2 Fotogrammetrinen prosessi 2008
Luento 7 Stereokartoituskojeet 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2008 Maa-57.1030 Fotogrammetrian perusteet 2 Fotogrammetrinen prosessi 2008
Maa-57.1030 Fotogrammetrian perusteet
 Maa-57.1030 Fotogrammetrian perusteet Luento 8 Kartoitussovellukset Petri Rönnholm/Henrik Haggrén Mitä fotogrammetrisella kartoituksella tuotetaan? 3D koordinaatteja kohteesta Maaston korkeusmalli Topograafiset
Maa-57.1030 Fotogrammetrian perusteet Luento 8 Kartoitussovellukset Petri Rönnholm/Henrik Haggrén Mitä fotogrammetrisella kartoituksella tuotetaan? 3D koordinaatteja kohteesta Maaston korkeusmalli Topograafiset
1. STEREOKUVAPARIN OTTAMINEN ANAGLYFIKUVIA VARTEN. Hyvien stereokuvien ottaminen edellyttää kahden perusasian ymmärtämistä.
 3-D ANAGLYFIKUVIEN TUOTTAMINEN Fotogrammetrian ja kaukokartoituksen laboratorio Teknillinen korkeakoulu Petri Rönnholm Perustyövaiheet: A. Ota stereokuvapari B. Poista vasemmasta kuvasta vihreä ja sininen
3-D ANAGLYFIKUVIEN TUOTTAMINEN Fotogrammetrian ja kaukokartoituksen laboratorio Teknillinen korkeakoulu Petri Rönnholm Perustyövaiheet: A. Ota stereokuvapari B. Poista vasemmasta kuvasta vihreä ja sininen
Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 13.10.2004) Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus AIHEITA Stereomittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 13.10.2004) Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus AIHEITA Stereomittaus
Luento 10: Optinen 3-D mittaus ja laserkeilaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Mittaushavaintojen täsmällinen käsittelymenenetelmä
 Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
Maa-57.260. Kameran kalibrointi. TKK/Fotogrammetria/PP
 Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Tekijä Pitkä matematiikka Pisteen (x, y) etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.
 etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.") Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
JUHTA - Julkisen hallinnon tietohallinnon neuvottelukunta
 JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 6: EUREF-FIN:n ja KKJ:n välinen kolmiulotteinen yhdenmuotoisuusmuunnos ja sen tarkkuus Versio: 1.0 / 3.2.2016
JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 6: EUREF-FIN:n ja KKJ:n välinen kolmiulotteinen yhdenmuotoisuusmuunnos ja sen tarkkuus Versio: 1.0 / 3.2.2016
 MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
EUREF-FIN/N2000-MUUNNOKSET HELSINGIN KAUPUNGISSA
 1 (10) EUREF-FIN/N2000-MUUNNOKSET HELSINGIN KAUPUNGISSA 5.3.2012 2 (10) Sisältö: 1 Johdanto... 3 1.1 Muunnosasetukset paikkatieto-ohjelmistoissa... 3 1.2 Lisätiedot... 3 2 Korkeusjärjestelmän muunnos NN
1 (10) EUREF-FIN/N2000-MUUNNOKSET HELSINGIN KAUPUNGISSA 5.3.2012 2 (10) Sisältö: 1 Johdanto... 3 1.1 Muunnosasetukset paikkatieto-ohjelmistoissa... 3 1.2 Lisätiedot... 3 2 Korkeusjärjestelmän muunnos NN
Tekijä Pitkä matematiikka
 K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
Radiotekniikan sovelluksia
 Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
FOTOGRAMMETRINEN PISTETIHENNYS
 FOTOGRAMMETRINEN PISTETIHENNYS 1. Yleistä 2. Ilmakuvaus SKM Gisair Oy Työssä määritettiin ulkoinen orientointi Sotkamon kunnan keskustan alueen ilmakuvaukselle. Ilmakuvauksen teki SKM Gisair Oy keväällä
FOTOGRAMMETRINEN PISTETIHENNYS 1. Yleistä 2. Ilmakuvaus SKM Gisair Oy Työssä määritettiin ulkoinen orientointi Sotkamon kunnan keskustan alueen ilmakuvaukselle. Ilmakuvauksen teki SKM Gisair Oy keväällä
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta
 Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Luento 9. Stereokartoituskojeet
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 9. Stereokartoituskojeet AIHEITA Analogiset stereokartoituskojeet Analyyttiset stereokartoituskojeet Digitaalinen
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 9. Stereokartoituskojeet AIHEITA Analogiset stereokartoituskojeet Analyyttiset stereokartoituskojeet Digitaalinen
Differentiaali- ja integraalilaskenta 3 Mallit laskuharjoitukseen 3 /
 MS-A3x Differentiaali- ja integraalilaskenta 3, IV/6 Differentiaali- ja integraalilaskenta 3 Mallit laskuharjoitukseen 3 / 9..-.3. Avaruusintegraalit ja muuttujanvaihdot Tehtävä 3: Laske sopivalla muunnoksella
MS-A3x Differentiaali- ja integraalilaskenta 3, IV/6 Differentiaali- ja integraalilaskenta 3 Mallit laskuharjoitukseen 3 / 9..-.3. Avaruusintegraalit ja muuttujanvaihdot Tehtävä 3: Laske sopivalla muunnoksella
PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9.2.2011
 PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9..0 Kokeessa saa vastata enintään kymmeneen tehtävään.. Sievennä a) 9 x x 6x + 9, b) 5 9 009 a a, c) log 7 + lne 7. Muovailuvahasta tehty säännöllinen tetraedri muovataan
PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9..0 Kokeessa saa vastata enintään kymmeneen tehtävään.. Sievennä a) 9 x x 6x + 9, b) 5 9 009 a a, c) log 7 + lne 7. Muovailuvahasta tehty säännöllinen tetraedri muovataan
Suorakulmainen kolmio
 Suorakulmainen kolmio 1. Määritä terävä kulma α, β ja γ, kun sinα = 0,5782, cos β = 0,745 ja tanγ = 1,222. π 2. Määritä trigonometristen funktioiden sini, kosini ja tangentti, kun kulma α = ja 3 β = 73,2
Suorakulmainen kolmio 1. Määritä terävä kulma α, β ja γ, kun sinα = 0,5782, cos β = 0,745 ja tanγ = 1,222. π 2. Määritä trigonometristen funktioiden sini, kosini ja tangentti, kun kulma α = ja 3 β = 73,2
Luento Fotogrammetrian perusteet. Henrik Haggrén
 Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Yhtälön oikealla puolella on säteen neliö, joten r. = 5 eli r = ± 5. Koska säde on positiivinen, niin r = 5.
 Tekijä Pitkä matematiikka 5 7..017 31 Kirjoitetaan yhtälö keskipistemuotoon ( x x ) + ( y y ) = r. 0 0 a) ( x 4) + ( y 1) = 49 Yhtälön vasemmalta puolelta nähdään, että x 0 = 4 ja y 0 = 1, joten ympyrän
Tekijä Pitkä matematiikka 5 7..017 31 Kirjoitetaan yhtälö keskipistemuotoon ( x x ) + ( y y ) = r. 0 0 a) ( x 4) + ( y 1) = 49 Yhtälön vasemmalta puolelta nähdään, että x 0 = 4 ja y 0 = 1, joten ympyrän
Luento 10 3-D maailma. fotogrammetriaan ja kaukokartoitukseen
 Luento 10 3-D maailma 1 Luennot 2007 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 10 3-D maailma 1 Luennot 2007 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Stereopaikannusjärjestelmän tarkkuus (3 op)
") Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Vanhoja koetehtäviä. Analyyttinen geometria 2016
 Vanhoja koetehtäviä Analyyttinen geometria 016 1. Määritä luvun a arvo, kun piste (,3) on käyrällä a(3x + a) = (y - 1). Suora L kulkee pisteen (5,1) kautta ja on kohtisuorassa suoraa 6x + 7y - 19 = 0 vastaan.
Vanhoja koetehtäviä Analyyttinen geometria 016 1. Määritä luvun a arvo, kun piste (,3) on käyrällä a(3x + a) = (y - 1). Suora L kulkee pisteen (5,1) kautta ja on kohtisuorassa suoraa 6x + 7y - 19 = 0 vastaan.
2 Pistejoukko koordinaatistossa
 Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
TTY Mittausten koekenttä. Käyttö. Sijainti
 TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
Grä sbö len tuulivöimähänke: Kuväsövitteet
 Grä sbö len tuulivöimähänke: Kuväsövitteet 1. Yleistä: Kaikissa kuvasovitteissa on käytetty tuulivoimalatyyppiä Nordex N117 2.4 MW. Napakorkeus: 141 m Lavan pituus: 58,5 m Roottorin halkaisija: 117 m Menetelmä:
Grä sbö len tuulivöimähänke: Kuväsövitteet 1. Yleistä: Kaikissa kuvasovitteissa on käytetty tuulivoimalatyyppiä Nordex N117 2.4 MW. Napakorkeus: 141 m Lavan pituus: 58,5 m Roottorin halkaisija: 117 m Menetelmä:
Luento 6 Mittausten suunnittelu II. erikoissovellukset
 Luento 6 Mittausten suunnittelu II 1 Aiheita Mittausongelman määrittely Tarkkuusluvut Suhteellinen tarkkuusluku Suhteellinen tarkkuus Tarkkuuden arvioiminen Kuvahavainnon keskivirhe Verkon rakennevakio
Luento 6 Mittausten suunnittelu II 1 Aiheita Mittausongelman määrittely Tarkkuusluvut Suhteellinen tarkkuusluku Suhteellinen tarkkuus Tarkkuuden arvioiminen Kuvahavainnon keskivirhe Verkon rakennevakio
Juuri 3 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty
 Kertaus K1. a) Ratkaistaan suorakulmaisen kolmion kateetin pituus x tangentin avulla. tan9 x,5,5 x,5 tan 9 x 2,8... x» 2,8 (cm) Kateetin pituus x on 2,8 cm. b) Ratkaistaan vinokulmaisen kolmion sivun pituus
Kertaus K1. a) Ratkaistaan suorakulmaisen kolmion kateetin pituus x tangentin avulla. tan9 x,5,5 x,5 tan 9 x 2,8... x» 2,8 (cm) Kateetin pituus x on 2,8 cm. b) Ratkaistaan vinokulmaisen kolmion sivun pituus
EUREF-FIN/N2000 käyttöönotto Helsingissä
 EUREF-FIN/N2000 käyttöönotto Helsingissä http://www.hel.fi/hki/kv/fi/kaupunkimittausosasto/kartat+ja+paikkatiedot/koordinaatisto Muutokset Helsngissä: Korkeusjärjestelmä: Tasokoordinaatisto: Pohjoiskoordinaatti
EUREF-FIN/N2000 käyttöönotto Helsingissä http://www.hel.fi/hki/kv/fi/kaupunkimittausosasto/kartat+ja+paikkatiedot/koordinaatisto Muutokset Helsngissä: Korkeusjärjestelmä: Tasokoordinaatisto: Pohjoiskoordinaatti
Valitse vain kuusi tehtävää! Tee etusivun yläreunaan pisteytysruudukko! Kaikkiin tehtäviin tarvittavat välivaiheet esille!
 5.4.013 Jussi Tyni 1. Selitä ja piirrä seuraavat lyhyesti: a) Kehäkulma ja keskikulma b) Todista, että kolmion kulmien summa on 180 astetta. Selitä päätelmiesi perustelut.. a) Suorakulmaisen kolmion kateetit
5.4.013 Jussi Tyni 1. Selitä ja piirrä seuraavat lyhyesti: a) Kehäkulma ja keskikulma b) Todista, että kolmion kulmien summa on 180 astetta. Selitä päätelmiesi perustelut.. a) Suorakulmaisen kolmion kateetit
Luento 3: Keskusprojektiokuvaus
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 11.3.2003, Päivityksiä: Katri Koistinen, 20.1.2004) Luento 3: Keskusprojektiokuvaus
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 11.3.2003, Päivityksiä: Katri Koistinen, 20.1.2004) Luento 3: Keskusprojektiokuvaus
yleisessä muodossa x y ax by c 0. 6p
 MAA..0 Muista kirjoittaa jokaiseen paperiin nimesi! Tee vastauspaperin yläreunaan pisteytysruudukko! Valitse kuusi tehtävää! Perustele vastauksesi välivaiheilla! Jussi Tyni Ratkaise: a) x x b) xy x 6y
MAA..0 Muista kirjoittaa jokaiseen paperiin nimesi! Tee vastauspaperin yläreunaan pisteytysruudukko! Valitse kuusi tehtävää! Perustele vastauksesi välivaiheilla! Jussi Tyni Ratkaise: a) x x b) xy x 6y
LIITE 1 VIRHEEN ARVIOINNISTA
 1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
LIITE 1 VIRHEEN ARVIOINNISTA
 1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
A. Desimaalilukuja kymmenjärjestelmän avulla
 1(8) Kymmenjärjestelmä desimaalilukujen ja mittayksiköiden muunnosten pohjana A. Miten saadaan desimaalilukuihin ymmärrystä 10-järjestelmän avulla? B. Miten saadaan mittayksiköiden muunnoksiin ymmärrystä
1(8) Kymmenjärjestelmä desimaalilukujen ja mittayksiköiden muunnosten pohjana A. Miten saadaan desimaalilukuihin ymmärrystä 10-järjestelmän avulla? B. Miten saadaan mittayksiköiden muunnoksiin ymmärrystä
Autostereoskooppinen näyttö
 Maa-57.270 Fotogrammetrian seminaarityö Autostereoskooppinen näyttö 2005 Jaakko Järvinen Sisällysluettelo 1. Johdanto...3 2. Komposiittikuvat autostereoskooppisten kuvien toteutuksessa... 3 2.1 Juovallisen
Maa-57.270 Fotogrammetrian seminaarityö Autostereoskooppinen näyttö 2005 Jaakko Järvinen Sisällysluettelo 1. Johdanto...3 2. Komposiittikuvat autostereoskooppisten kuvien toteutuksessa... 3 2.1 Juovallisen
MAA7 7.1 Koe Jussi Tyni Valitse kuusi tehtävää! Tee vastauspaperiin pisteytysruudukko! Kaikkiin tehtäviin välivaiheet näkyviin!
 MAA7 7.1 Koe Jussi Tyni 9.1.01 1. Laske raja-arvot: a) 5 lim 5 10 b) lim 9 71. a) Määritä erotusosamäärän avulla funktion f (). f ( ) derivaatta 1 b) Millä välillä funktio f ( ) 9 on kasvava? Perustele
MAA7 7.1 Koe Jussi Tyni 9.1.01 1. Laske raja-arvot: a) 5 lim 5 10 b) lim 9 71. a) Määritä erotusosamäärän avulla funktion f (). f ( ) derivaatta 1 b) Millä välillä funktio f ( ) 9 on kasvava? Perustele
Mittausten suunnittelu I
 Mittausten suunnittelu I Eteenpäinleikkaukseen perustuvan mittauksen tarkkuus riippuu kahdesta asiasta (C.S. Fraser, 1996): 1) kuvaus-/tähtäyssäteen määritystarkkuudesta 2) kuvausgeometriasta Saavutettavaa
Mittausten suunnittelu I Eteenpäinleikkaukseen perustuvan mittauksen tarkkuus riippuu kahdesta asiasta (C.S. Fraser, 1996): 1) kuvaus-/tähtäyssäteen määritystarkkuudesta 2) kuvausgeometriasta Saavutettavaa
LIITE 1 VIRHEEN ARVIOINNISTA
 Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
3.2 Matriisien laskutoimitukset. 3.2 Matriisien laskutoimitukset. 3.2 Matriisien laskutoimitukset. 3.2 Matriisien laskutoimitukset. Olkoot A 2 := AA =
 3 3 Olkoot 9 8 B 7 6 ja A 5 4 [ 3 4 Nyt A + B, AB ja BB eivät ole mielekkäitä (vastaavilla lineaarikuvauksilla menisivät dimensiot solmuun tällaisista yhdistelmistä) Kuitenkin voidaan laskea BA ja 9( )
3 3 Olkoot 9 8 B 7 6 ja A 5 4 [ 3 4 Nyt A + B, AB ja BB eivät ole mielekkäitä (vastaavilla lineaarikuvauksilla menisivät dimensiot solmuun tällaisista yhdistelmistä) Kuitenkin voidaan laskea BA ja 9( )
Ilmakolmioinnin laadunvalvonta fotogrammetristen pintamallien ja laserkeilausaineiston avulla
 Ilmakolmioinnin laadunvalvonta fotogrammetristen pintamallien ja laserkeilausaineiston avulla Aalto-yliopiston insinööritieteiden korkeakoulun maankäyttötieteiden laitoksella tehty diplomityö Espoo, toukokuu
Ilmakolmioinnin laadunvalvonta fotogrammetristen pintamallien ja laserkeilausaineiston avulla Aalto-yliopiston insinööritieteiden korkeakoulun maankäyttötieteiden laitoksella tehty diplomityö Espoo, toukokuu
2.1 Yhdenmuotoiset suorakulmaiset kolmiot
 2.1 Yhdenmuotoiset suorakulmaiset kolmiot 2.2 Kulman tangentti 2.3 Sivun pituus tangentin avulla 2.4 Kulman sini ja kosini 2.5 Trigonometristen funktioiden käyttöä 2.7 Avaruuskappaleita 2.8 Lieriö 2.9
2.1 Yhdenmuotoiset suorakulmaiset kolmiot 2.2 Kulman tangentti 2.3 Sivun pituus tangentin avulla 2.4 Kulman sini ja kosini 2.5 Trigonometristen funktioiden käyttöä 2.7 Avaruuskappaleita 2.8 Lieriö 2.9
Teknillinen Korkeakoulu Fotogrammetrian ja kaukokartoituksen laboratorio Maa-57.270 Fotogrammetrian, kuvatulkinnan ja kaukokartoituksen seminaari
 Teknillinen Korkeakoulu Fotogrammetrian ja kaukokartoituksen laboratorio Maa-57.270 Fotogrammetrian, kuvatulkinnan ja kaukokartoituksen seminaari Phantogrammit Espoossa 22.4.2005 Laura Liikkanen 58271V
Teknillinen Korkeakoulu Fotogrammetrian ja kaukokartoituksen laboratorio Maa-57.270 Fotogrammetrian, kuvatulkinnan ja kaukokartoituksen seminaari Phantogrammit Espoossa 22.4.2005 Laura Liikkanen 58271V
RTEK-2000 Statiikan perusteet. 1. välikoe ke LUENTOSALEISSA K1705 klo 11:00-14:00 sekä S4 klo 11:15-14:15 S4 on sähkötalossa
 RTEK-2000 Statiikan perusteet 1. välikoe ke 27.2. LUENTOSALEISSA K1705 klo 11:00-14:00 sekä S4 klo 11:15-14:15 S4 on sähkötalossa RTEK-2000 Statiikan perusteet 4 op 1. välikoealue luennot 21.2. asti harjoitukset
RTEK-2000 Statiikan perusteet 1. välikoe ke 27.2. LUENTOSALEISSA K1705 klo 11:00-14:00 sekä S4 klo 11:15-14:15 S4 on sähkötalossa RTEK-2000 Statiikan perusteet 4 op 1. välikoealue luennot 21.2. asti harjoitukset
4 LUKUJONOT JA SUMMAT
 Huippu Kertaus Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 0.7.08 4 LUKUJONOT JA SUMMAT ALOITA PERUSTEISTA 45A. Määritetään lukujonon (a n ) kolme ensimmäistä jäsentä ja sadas jäsen a 00 sijoittamalla
Huippu Kertaus Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 0.7.08 4 LUKUJONOT JA SUMMAT ALOITA PERUSTEISTA 45A. Määritetään lukujonon (a n ) kolme ensimmäistä jäsentä ja sadas jäsen a 00 sijoittamalla
Tampereen yliopisto Tietokonegrafiikka 2013 Tietojenkäsittelytiede Harjoitus
 Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
2 Raja-arvo ja jatkuvuus
 Juuri 6 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 5.7.6 Raja-arvo ja jatkuvuus. a) Kun suorakulmion kärki on kohdassa =, on suorakulmion kannan pituus. Suorakulmion korkeus on käyrän y-koordinaatti
Juuri 6 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 5.7.6 Raja-arvo ja jatkuvuus. a) Kun suorakulmion kärki on kohdassa =, on suorakulmion kannan pituus. Suorakulmion korkeus on käyrän y-koordinaatti
Tämä luku nojaa vahvasti esimerkkeihin. Aloitetaan palauttamalla mieleen, mitä koordinaatistolla tarkoitetaan.
 MAB: Koordinaatisto geometrian apuna Aluksi Geometriassa tulee silloin tällöin eteen tilanne, jossa piirroksen tekeminen koordinaatistoon yksinkertaistaa laskuja. Toisinaan taas tilanne on muuten vaan
MAB: Koordinaatisto geometrian apuna Aluksi Geometriassa tulee silloin tällöin eteen tilanne, jossa piirroksen tekeminen koordinaatistoon yksinkertaistaa laskuja. Toisinaan taas tilanne on muuten vaan
Kokeile kuvasuunnistusta. 3D:nä
 Kokeile kuvasuunnistusta 3D:nä Oheinen 3D-kuvasuunnistus on julkaistu Suunnistaja-lehdessä 1/13. Tämä kuvasuunnistus on toteutettu tarkkuussuunnistuksen aikarastitehtävän mukaisesti. Aikarastilla kartta
Kokeile kuvasuunnistusta 3D:nä Oheinen 3D-kuvasuunnistus on julkaistu Suunnistaja-lehdessä 1/13. Tämä kuvasuunnistus on toteutettu tarkkuussuunnistuksen aikarastitehtävän mukaisesti. Aikarastilla kartta
RATKAISUT: 16. Peilit ja linssit
 Physica 9 1 painos 1(6) : 161 a) Kupera linssi on linssi, jonka on keskeltä paksumpi kuin reunoilta b) Kupera peili on peili, jossa heijastava pinta on kaarevan pinnan ulkopinnalla c) Polttopiste on piste,
Physica 9 1 painos 1(6) : 161 a) Kupera linssi on linssi, jonka on keskeltä paksumpi kuin reunoilta b) Kupera peili on peili, jossa heijastava pinta on kaarevan pinnan ulkopinnalla c) Polttopiste on piste,
Kertaus. x x x. K1. a) b) x 5 x 6 = x 5 6 = x 1 = 1 x, x 0. K2. a) a a a a, a > 0
 b) x 5 x 6 = x 5 6 = x 1 = 1 x, x 0. K2. a) a a a a, a > 0") Juuri 8 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 8.9.07 Kertaus K. a) 6 4 64 0, 0 0 0 0 b) 5 6 = 5 6 = =, 0 c) d) K. a) b) c) d) 4 4 4 7 4 ( ) 7 7 7 7 87 56 7 7 7 6 6 a a a, a > 0 6 6 a
Juuri 8 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 8.9.07 Kertaus K. a) 6 4 64 0, 0 0 0 0 b) 5 6 = 5 6 = =, 0 c) d) K. a) b) c) d) 4 4 4 7 4 ( ) 7 7 7 7 87 56 7 7 7 6 6 a a a, a > 0 6 6 a
Jatkuvat satunnaismuuttujat
 Jatkuvat satunnaismuuttujat Satunnaismuuttuja on jatkuva jos se voi ainakin periaatteessa saada kaikkia mahdollisia reaalilukuarvoja ainakin tietyltä väliltä. Täytyy ymmärtää, että tällä ei ole mitään
Jatkuvat satunnaismuuttujat Satunnaismuuttuja on jatkuva jos se voi ainakin periaatteessa saada kaikkia mahdollisia reaalilukuarvoja ainakin tietyltä väliltä. Täytyy ymmärtää, että tällä ei ole mitään
1/6 TEKNIIKKA JA LIIKENNE FYSIIKAN LABORATORIO V1.31 9.2011
 1/6 333. SÄDEOPTIIKKA JA FOTOMETRIA A. INSSIN POTTOVÄIN JA TAITTOKYVYN MÄÄRITTÄMINEN 1. Työn tavoite. Teoriaa 3. Työn suoritus Työssä perehdytään valon kulkuun väliaineissa ja niiden rajapinnoissa sädeoptiikan
1/6 333. SÄDEOPTIIKKA JA FOTOMETRIA A. INSSIN POTTOVÄIN JA TAITTOKYVYN MÄÄRITTÄMINEN 1. Työn tavoite. Teoriaa 3. Työn suoritus Työssä perehdytään valon kulkuun väliaineissa ja niiden rajapinnoissa sädeoptiikan
3 Eksponentiaalinen malli
 Eksponentiaalinen malli Eksponentiaalinen kasvaminen ja väheneminen 6. Kulunut aika (h) Bakteerien määrä 0 80 0 60 0 0 7 7 0 0 0 6. 90 % 0,90 Pienennöksiä (kpl) Piirroksen korkeus (cm) 0,90 6,0, 0,90 6,0,06,
Eksponentiaalinen malli Eksponentiaalinen kasvaminen ja väheneminen 6. Kulunut aika (h) Bakteerien määrä 0 80 0 60 0 0 7 7 0 0 0 6. 90 % 0,90 Pienennöksiä (kpl) Piirroksen korkeus (cm) 0,90 6,0, 0,90 6,0,06,
4 TOISEN ASTEEN YHTÄLÖ
 Huippu Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 7.4.016 4 TOISEN ASTEEN YHTÄLÖ POHDITTAVAA 1. Merkitään toisen neliön sivun pituutta kirjaimella x. Tällöin toisen neliön sivun pituus on
Huippu Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 7.4.016 4 TOISEN ASTEEN YHTÄLÖ POHDITTAVAA 1. Merkitään toisen neliön sivun pituutta kirjaimella x. Tällöin toisen neliön sivun pituus on
7.4 PERUSPISTEIDEN SIJAINTI
 67 7.4 PERUSPISTEIDEN SIJAINTI Optisen systeemin peruspisteet saadaan systeemimatriisista. Käytetään seuraavan kuvan merkintöjä: Kuvassa sisäänmenotaso on ensimmäisen linssin ensimmäisessä pinnassa eli
67 7.4 PERUSPISTEIDEN SIJAINTI Optisen systeemin peruspisteet saadaan systeemimatriisista. Käytetään seuraavan kuvan merkintöjä: Kuvassa sisäänmenotaso on ensimmäisen linssin ensimmäisessä pinnassa eli
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 2017 Insinöörivalinnan matematiikan koe , Ratkaisut (Sarja A)
") Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 017 Insinöörivalinnan matematiikan koe 30..017, Ratkaisut (Sarja A) 1. a) Lukujen 9, 0, 3 ja x keskiarvo on. Määritä x. (1 p.) b) Mitkä reaaliluvut
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 017 Insinöörivalinnan matematiikan koe 30..017, Ratkaisut (Sarja A) 1. a) Lukujen 9, 0, 3 ja x keskiarvo on. Määritä x. (1 p.) b) Mitkä reaaliluvut
RAKENNUSTEN LÄMPÖKUVAUS uudet ohjeet 2015
 RAKENNUSTEN LÄMPÖKUVAUS uudet ohjeet 2015 Lämpökameravaatimuksien tarkentuminen Mittausolosuhdevaatimusten muuttuminen Rakennuksen vallitsevan paine-eron huomioiminen lämpötilaindeksin laskennassa 1.12.2015
RAKENNUSTEN LÄMPÖKUVAUS uudet ohjeet 2015 Lämpökameravaatimuksien tarkentuminen Mittausolosuhdevaatimusten muuttuminen Rakennuksen vallitsevan paine-eron huomioiminen lämpötilaindeksin laskennassa 1.12.2015
Suhteellinen nopeus. Matkustaja P kävelee nopeudella 1.0 m/s pitkin 3.0 m/s nopeudella etenevän junan B käytävää
 3.5 Suhteellinen nopeus Matkustaja P kävelee nopeudella 1.0 m/s pitkin 3.0 m/s nopeudella etenevän junan B käytävää P:n nopeus junassa istuvan toisen matkustajan suhteen on v P/B-x = 1.0 m/s Intuitio :
3.5 Suhteellinen nopeus Matkustaja P kävelee nopeudella 1.0 m/s pitkin 3.0 m/s nopeudella etenevän junan B käytävää P:n nopeus junassa istuvan toisen matkustajan suhteen on v P/B-x = 1.0 m/s Intuitio :
Tekijä Pitkä matematiikka Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4).
, ( 2,1), (1, 0), (4, 1) ja ( 11, 4).") Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Maanmittauspäivät 2014 Seinäjoki
 Maanmittauspäivät 2014 Seinäjoki Parempaa tarkkuutta satelliittimittauksille EUREF/N2000 - järjestelmissä Ympäristösi parhaat tekijät 2 EUREF koordinaattijärjestelmän käyttöön otto on Suomessa sujunut
Maanmittauspäivät 2014 Seinäjoki Parempaa tarkkuutta satelliittimittauksille EUREF/N2000 - järjestelmissä Ympäristösi parhaat tekijät 2 EUREF koordinaattijärjestelmän käyttöön otto on Suomessa sujunut
EUREF-FIN JA KORKEUDET. Pasi Häkli Geodeettinen laitos 10.3.2010
 EUREF-FIN JA KORKEUDET Pasi Häkli Geodeettinen laitos 10.3.2010 EUREF-FIN:n joitain pääominaisuuksia ITRF96-koordinaatiston kautta globaalin koordinaattijärjestelmän paikallinen/kansallinen realisaatio
EUREF-FIN JA KORKEUDET Pasi Häkli Geodeettinen laitos 10.3.2010 EUREF-FIN:n joitain pääominaisuuksia ITRF96-koordinaatiston kautta globaalin koordinaattijärjestelmän paikallinen/kansallinen realisaatio
TEHTÄVIEN RATKAISUT. Luku a) Merkintä f (5) tarkoittaa lukua, jonka funktio tuottaa, kun siihen syötetään luku 5.
 Merkintä f (5) tarkoittaa lukua, jonka funktio tuottaa, kun siihen syötetään luku 5.") TEHTÄVIEN RATKAISUT Luku 4.1 183. a) Merkintä f (5) tarkoittaa lukua, jonka funktio tuottaa, kun siihen syötetään luku 5. Lasketaan funktioon syötetyn luvun neliö: 5 = 5. Saatuun arvoon lisätään luku 1:
TEHTÄVIEN RATKAISUT Luku 4.1 183. a) Merkintä f (5) tarkoittaa lukua, jonka funktio tuottaa, kun siihen syötetään luku 5. Lasketaan funktioon syötetyn luvun neliö: 5 = 5. Saatuun arvoon lisätään luku 1:
Luento 1 Fotogrammetria prosessina Maa Fotogrammetrian perusteet 1
 Luento 1 Fotogrammetria prosessina. 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Maa-57.1030 Fotogrammetrian perusteet (3 op) Sisältyy geomatiikan koulutusohjelman perusmoduuliin A1. Kurssin kuvaus Stereofotogrammetria.
Luento 1 Fotogrammetria prosessina. 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Maa-57.1030 Fotogrammetrian perusteet (3 op) Sisältyy geomatiikan koulutusohjelman perusmoduuliin A1. Kurssin kuvaus Stereofotogrammetria.
Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia
 Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa 1 / 31 Luennon sisältö Suhteellinen translaatioliike
Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa 1 / 31 Luennon sisältö Suhteellinen translaatioliike
Luento 4: Kuvien geometrinen tulkinta
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kuvien geometrinen tulkinta AIHEITA Muunnokset informaatiokanavassa Geometrisen tulkinnan vaihtoehdot Mittakaava
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kuvien geometrinen tulkinta AIHEITA Muunnokset informaatiokanavassa Geometrisen tulkinnan vaihtoehdot Mittakaava
y=-3x+2 y=2x-3 y=3x+2 x = = 6
 MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
Matemaattisen analyysin tukikurssi
 Matemaattisen analyysin tukikurssi 12. Kurssikerta Petrus Mikkola 5.12.2016 Tämän kerran asiat Sini-ja kosifunktio Yksikköympyrä Tangentti- ja kotangenttifunktio Trigonometristen funktioiden ominaisuuksia
Matemaattisen analyysin tukikurssi 12. Kurssikerta Petrus Mikkola 5.12.2016 Tämän kerran asiat Sini-ja kosifunktio Yksikköympyrä Tangentti- ja kotangenttifunktio Trigonometristen funktioiden ominaisuuksia
A-osa. Ratkaise kaikki tämän osan tehtävät. Tehtävät arvostellaan pistein 0-6. Taulukkokirjaa saa käyttää apuna, laskinta ei.
 PITKÄ MATEMATIIKKA PRELIMINÄÄRIKOE 7..07 NIMI: A-osa. Ratkaise kaikki tämän osan tehtävät. Tehtävät arvostellaan pistein 0-. Taulukkokirjaa saa käyttää apuna, laskinta ei.. Valitse oikea vaihtoehto ja
PITKÄ MATEMATIIKKA PRELIMINÄÄRIKOE 7..07 NIMI: A-osa. Ratkaise kaikki tämän osan tehtävät. Tehtävät arvostellaan pistein 0-. Taulukkokirjaa saa käyttää apuna, laskinta ei.. Valitse oikea vaihtoehto ja
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 2018 Insinöörivalinnan matematiikan koe, , Ratkaisut (Sarja A)
") Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 2018 Insinöörivalinnan matematiikan koe, 2952018, Ratkaisut (Sarja A) 1 Anna kaikissa kohdissa vastaukset tarkkoina arvoina Kohdassa d), anna kulmat
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 2018 Insinöörivalinnan matematiikan koe, 2952018, Ratkaisut (Sarja A) 1 Anna kaikissa kohdissa vastaukset tarkkoina arvoina Kohdassa d), anna kulmat