Luento 5: Kolmioinnin laskenta
|
|
|
- Aino Kapulainen
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
1 Maa-57.0 Fotogrammetrinen kartoitus Luento-ohjelma Luento 5: Kolmioinnin laskenta Luento 5: Kolmioinnin laskenta Ilmakolmiointi Blokkitasoitus painotetulla PNS-menetelmällä Kolmioinnin työvaiheet Anblock-kolmiointi Virheyhtälöt sädekimpputasoituksessa Itsekalibrointi blokkitasoituksessa Likiarvojen hankinta GPS-havainnot ilmakolmioinnin tukena Simulointi Direct sensor orientation GPS/IMU-integrointi Integroitu sensoriorientointi Tuloksia Vertailua Ilmakolmiointi (Alkuperäinen luento: Henrik Haggrén, Muutoksia: Eija Honkavaara ) Ilmakolmiointi on kuvajoukon ulkoisten orientointien ratkaisemista stereokartoituksen ja ortokuvauksen tarpeisiin. Kolmioinnin lopputuotteita ovat lisäksi tihennyspisteiden maastokoordinaatit. Kolmioinnilla on erityinen merkitys geometrialtaan yhtenäisen ja tasalaatuisen kartta-aineiston tuottamisessa. Kolmioinnissa kartoitusalueen kuvat käsitellään yhtenä blokkina. Blokissa kuvat orientoidaan yht'aikaa sisäisesti toisiinsa ja ulkoisesti maaston koordinaatistoon. Kolmioiduista kuvista tulkitut stereomallit ja ortokuvat liittyvät toisiinsa saumattomasti. o../../../300/luennot/1/1.html#ilmakolmiointi Kolmiointi on tehtävä, koska kuvien orientointitietoja ei voida havaita suoraan riittävän tarkasti. Orientoinnit lasketaan välillisesti kolmiointipisteiden kuvahavainnoista. Kolmiointipisteitä ovat kuvien väliset liitospisteet sekä kuvien ja maaston väliset lähtöpisteet. o Orientointitietoja pyritään havaitsemaan yhä useammin myös suoraan kuvauskoneen navigointitiedoista (direct sensor orientation). Kameran projektiokeskusten koordinaatit on laskettavissa GPS- ja inertiahavainnoista, kallistuskulmat kallistusantureilla ja kompassilla tehdyistä havainnoista. Muita välittömiä keinoja ulkoisen orientoinnin osittaiseen havaitsemiseen ovat statoskooppi ja altimetri. Statoskooppi on ilmanpaineen vaihteluja rekisteröivä laite, jolla voidaan määrittää muutokset lentokorkeudessa. Altimetri on tutka- tai laserlaitteella lentokorkeutta rekisteröivä laite. Kolmiointi lasketaan kuvablokkina. Havaintoja ovat o Liitospisteiden kuvakoordinaatit 1
2 o Maastotukipisteet: kuva- ja maastokoordinaatit o Suorat ulkoisten orientointien havainnot (navigointihavainnot) GPS: projektiokeskukset GPS/IMU: Projektiokeskukset ja kallistukset Orientoinnit lasketaan kolmiointihavainnoista tasoittamalla, eli painotetulla pienimmän neliösumman sovituksella. Laskenta perustuu keskusprojektiokuvauksen koplanaarisuusja kollineaarisuusehtoihin. Kuvahavainnoista korjataan kaikki tunnetut systemaattiset virheet ennen tasoitusta eli havainnot redukoidaan samasuoraisiksi ja samatasoisiksi kamerakoordinaateiksi (Luento 4). Rakenteeltaan vahvassa blokissa redukointia voidaan parantaa keskusprojektiomallin lisäparametreilla, jotka selittävät havaintohin mahdollisesti jääneitä systemaattisia kuva- tai kamerakohtaisia virheitä. o Tasoitettaessa lähtöpisteitä voidaan painottaa sitä enemmän, mitä paremmin uusien pisteiden koordinaattien edellytetään sovittuvan maastossa käytettyyn kartoitusrunkoon. Kohteissa, joissa lähtöpisteistö on harva tai sitä ei ole lainkaan ja ulkoisten orientointien havaintoja ei ole, blokki deformoituu. Deformoitumista voidaan estää vahvistamalla blokin rakennetta. Rakenteeseen vaikuttavat kuvien ja kuvausjonojen peittosuhteet sekä lähtöpisteiden sijoittuminen blokin alueella. Nykyisin ilmakolmioinnissa hyödynnetään myös navigointihavainnot. Varsinkin laajoissa blokeissa ulkoisten orientointihavaintojen tuki on merkittävä, koska niitä käyttäen lähtöpisteiden määrää voidaan oleellisesti vähentää. o Mikäli navigointitiedot ovat tarkkoja, blokin deformoituminen voidaan estää täysin ja lähtöpisteitä tarvitaan ainoastaan paikallisen maastokoordinaatiston osoittamiseen. Blokki voidaan sitoa maastokoordinaatistoon myös ns. luonnollisin lähtöpistein. Luonnollisina pisteinä tulevat kysymykseen kuvilta havaitut yksityiskohdat, jotka mitataan maastossa jälkikäteen. Luonnollisten pisteiden identifiointitarkkuus on useimmiten huono, mikä on otettava huomioon blokin rakennetta suunniteltaessa. Hyviä esimerkkejä luonnollisista lähtöpisteistä ovat kaivon kannet ja rakennusten nurkat, korkeakuvauksissa myös teiden risteykset, pensaat ja puut. o Luonnollisten korkeustukipisteiden käyttöä voi suositella blokeissa, joissa lähtöpisteistö on harva, koska korkeustukihavainnoilla voidaan blokin deformoitumista estää tehokkaimmin. Jos korkeustukipisteet valitaan maastossa kohteista, jotka ovat tasaisia, havainnot ovat tarkkoja Z-koordinaatin osalta ja identifioinnin epätarkkuus vaikuttaa ainoastaan X- ja Y-koordinaatteihin. Hyviä kohteita korkeutukipisteille ovat maaston lakipisteet, teiden risteysalueet, tasaiset niityt, jne. Kolmioinnin tarkkuutta voidaan arvioida joko simuloimalla tai koekenttätestein. o Simuloimalla kolmioinnin tarkkuutta on 1960-luvulla selvitetty mm. Saksassa (Ackermann: mallikolmiointi) ja Suomessa (Kilpelä: sädekimppukolmiointi). o Kansainvälinen fotogrammetrian ja kaukokartoituksen seura ISPRS suoritti perusteellisen sarjan koetöitä kolmioinnin käytännön tarkkuuksien selvittämiseksi. o Vuonna 1993 Euroopan kokeellisen fotogrammetrian yhteistyöjärjestö OEEPE aloitti koetyöt digitaalisen kuvien käytöstä ilmakolmioinnissa. o OEEPE tutki automaattisen liitospisteenmittauksen tarkkuutta vuosina o Vuosina OEEPE:llä oli käynnissä suorapaikannusta ja integroitua sensoriorientointia koskeva tutkimus. Kolmioinnin laskenta tehdään joko stereomallein tai sädekimpuin. Mallikolmioinnissa havaintoyksikköinä käytetään stereomalleja. Kuvahavainnoista lasketaan ensin
3 mallikoordinaatit ja tasoituksen virheyhtälöt muodostetaan vasta mallikoordinaattien ja pistetuntemattomien välille. Sädekimppukolmioinnissa tasoituksen havaintoyksikköinä käytetään kuvia ja virheyhtälöt muodostetaan suoraan kuvahavaintojen ja pistetuntemattomien välille. o Tarkimmin fysikaalista mallia vastaa sädekimpputasoitus. Siinä lisäparametrien käyttö on luontevaa, koska virheyhtälöt kohdistuvat alkuperäisiin kuvahavaintoihin. Sädekimppukolmioinnissa yksittäisen kuvahavainnon virhe vaikuttaa kaikkiin kolmioinnilla ratkaistaviin tuntemattomiin, myös ympärillä olevien kuvien orientointeihin. o Mallikolmioinnin käyttö on käytännön kartoitusprojekteissa yleisempää kuin sädekimppukolmioinnin. Esimerkiksi yleisesti maailmalla käytetyistä Stuttgartin PAT-ohjelmista on myyty mallikolmiointiversiota kpl ja sädekimppuversiota 0-5 kpl (tieto vuodelta 1993). Yhtenä syynä mallikolmiointimenetelmän suosioon on ollut sen laskennallinen yksinkertaisuus ja helppokäyttöisyys. Esimerkiksi havaintovirheet paljastuvat nopeasti, koska niiden vaikutus rajoittuu lähinnä mallin liitospisteiden pistetuntemattomiin. Orientointimenetelmien kehitys: o sädekimppu- ja mallikolmiointi, itsekalibrointi, tilastolliset testit, karkeiden virheiden etsiminen o : analyyttiset stereomittauskojeet, on-line-kolmiointi o : skannatut analogiakuvat, GPS-tuettu ilmakolmiointi, automaattinen liitospisteiden mittaus o 000-> digitaaliset fotogrammetriset kamerat, integroitu sensoriorientointi ja suora georeferointi Tällä kurssilla käsitellään kolmiointia keskusprojektiokuvilla. Pushbroom-geometrian käsittely on monilta osin samanlaista, eroavuudet löytyvät lähinnä dynaamisen kuvausgeometrian mallinnuksesta. Terminologiaa GPS/IMU (Global Positioning System/Inertial Measurement Unit): GPS- ja inertiaalimittauksen yhdistäminen sensorin sijainnin ja kallistusten määrittämiseksi Ilmakolmiointi (Aerial triangulation) Suora sensoriorientointi (Direct sensor orientation) o Kuvan orientointien määrittäminen GPS/IMU-datan ja kalibroinnin avulla Integroitu sensoriorientointi (Integrated sensor orientation) o Kuvan orientointien ja kohdekoordinaattien ratkaisu GPS/IMU-havaintojen, kuvakoordinaattien ja optionaalisten maastotukipisteiden (GCP) yhteistasoituksella. o Myös epäsuora sensoriorientointi Suora georeferointi (Direct georeferencing) o Kohdekoordinaattien ratkaisu kuvilta käyttäen GPS/IMU-dataa ja kalibrointiparametrejä o Myös: orto-oikaisu GPS/IMU-datan, kalibrointiparametrien ja DTM:n avulla 3
4 Jonokolmiointi. Mallikolmiointi. Sädekimppukolmiointi. 4
5 Blokkitasoitus painotetulla PNS-menetelmällä Kuvahavainnot: liitospisteet, maastotukipisteet Maastotukihavainnot Error equations for block adjustment. Kolmioinnin työvaiheet Painotus Ilmakolmiointiprosessi o Kuvaus kuvauksen suunnittelu signalointi kuvaus identifiointi o Mittaus valmistelu mittaus kuvahavaintojen redukointi likiarvojen laskenta 5
6 o Tasoitus virheyhtälöiden muodostaminen välitasoitus virheiden paljastaminen lopullinen tasoitus o Leikkaus leikkaus lajittelu dokumentointi Tasoitusprosessi o Kuvakoordinaattien havaitseminen o Kamerakoordinaattien laskeminen o Mallien ja jonojen laskenta blokiksi ==> Likiarvot orientointi- ja pistetuntemattomille o Blokkitasoitus o Havaintovirheiden analysointi o Pistetuntemattomien eteenpäinleikkaus Analyyttiset stereokojeet ilmakolmioinnissa o Kamerakoordinaattien havaitseminen sisäinen ja keskinäinen orientointi absoluuttinen orientointi likimäärin, joko lähtöpisteillä, GPS-, ja vedenpintahavainnolla, vanhoilla pisteillä, jne. lähtö- ja liitospisteiden osoittaminen uusien pisteiden (rajamerkkien, ym.) osoittaminen tarvittaessa orienti- ja pistetuntemattomien likiarvot kolmiointiin o 'On-Line' -kolmiointi karkeiden ja puolikarkeiden virheiden havaitseminen hyvät likiarvot blokkitasoitukseen o Tasoitus joko mallikoordinaatein tai kamerakoordinaatein Esimerkki: Maanmittauslaitos kolmioi ilmakuvilla vuosittain (vv ) n stereomallin verran omassa maastokartoitustoiminnassaan, joilta malleilta kolmioimalla määritettyjä 3-D pisteitä oli yhteensä n kpl (keskimäärin pistettä/malli). Anblock-kolmiointi -D Anblock o Nivelloidut stereomallit o Mallit toisistaan riippumattomissa koordinaatistoissa o Helmert-muunnos 3-D Anblock o Nivelloidut stereomallit o Mallit toisistaan riippumattomissa koordinaatistoissa o Projektiokeskukset liitospisteinä o Vaiheet: 1. -D anblock ilman projektiokeskuksia. muunnos maastokoordinaatistoon 6

7 Kaksiulotteisen anblock-mallikolmioinnin virheyhtälöt lisättynä mallien nivelloinnilla. Kaksiulotteisen anblock-kolmioinnin virheyhtälöiden kerroinmatriisi. 7
8 Virheyhtälöt sädekimpputasoituksessa Virheyhtälökertoimet eli kuvahavaintojen differentiaaliyhtälöt ratkaistavien orientointi- ja pistetuntemattomien suhteen. Itsekalibrointi blokkitasoituksessa Sekä systemaattiset että satunnaiset virheet deformoivat kuvablokin, mikä näkyy tasoituksen jälkeen lähtöpisteiden jäännösvirheinä. Systemaattiset virheet näkyvät kuvahavaintojen jäännösvirheissä esiintyvinä säännöllisyyksinä. Jos matemaattista mallia laajennetaan lisäparametrein, joita ovat pääpisteen tai kameravakion korjaus ja optiikan piirtovirheet, voidaan tasoituksen jälkeiset kuva- ja kohdehavainnot sovittaa paremmin yhteen. Affiiinisuus: Radiaalisen piirtovirheen korjaus x = xs + ya y = 0 x = k xr + k xr k3xr y = k yr + k yr k3 yr Tangentiaalisen piirtovirheen korjaus x = p1 ( r + x ) + p xy 8
9 y = p1xy + p ( r + y ) Missä r = x + y Ebnerin matemaattiset parametrit s parameters (Ebner 1976) x = b x + b y b (x 1 + b ( y b y( x + b ( x b x( y b b 3 / 3) b / 3) / 3) 4b 7 + b 11 + b x( y ( x y = b y + b x + b xy b (y 6 + b 1 10 / 3) + b y( x b missä b =(1-p)*kuvakoko=0.4*0.3m= kuvakanta 1 / 3) + b xy ( x b b b b 4 4b / 3) / 3)( / 3) / 3) y / 3)( y Tasoituksessa valitaan tilastollisesti merkittävät lisäparametrit. Likiarvojen hankinta Koska kolmioinnin kuvausyhtälöt ovat epälineaarisia tuntemattomien suhteen, ne on linearisoitava. Linearisoiminen edellyttää likiarvojen laskemista sekä orientointi- että pistetuntemattomille, jotta virheyhtälöt voidaan muodostaa. Tasoitus on iteratiivista, ja väliakaisina tuntemattomina käytetään likiarvoihin tehtäviä parannuksia. Ilmakolmioinnissa likiarvot voidaan havaita suoraan kartalta ja kuvaustiedoista, kun lentokorkeus tunnetaan, ja kallistukset ovat pieniä. Projektiokeskusten GPS-havainnot sekä suorat orientointihavainnot käyvät sellaisenaan likiarvoina. Nykyaikaisessa ilmakuvakamerassa kuvaushetkiset kamera- ja kuvaliikkeet kompensoidaan, ja kuvaus on lähes nadiirikuvaus. o Kuvaliikeen kompensointi perustuu maaston liikettä mittaavan korrelaatiosensorin havaintoihin. o Koneen heilahduksista aiheutuvien kameraliikkeiden eli poikittais- ja pitkittäiskallistuksen kompensointi perustuu hyrrästabiloidun jalustan horisonttisensoreiden havaintoihin. o Kuvauskoneen suuntahyrrällä kompensoidaan koneen pituusakselin ja lentosuunnan välinen kiertokulma eli sortuma, ja kamera voidaan kiertää tarkasti kuvajonon suuntaan. GPS-havainnot ilmakolmioinnin tukena Satelliittipaikannukseen perustuva kameran ulkoisen orientoinnin havaitseminen on välitön keino määrittää ilmakuvien projektiokeskuksen koordinaatteja. Kuva- ja kohdehavainnoilla voidaan määrittää ilmakuvien ulkoinen orientointi vain välillisesti. Näitä käytetään GPS-blokeissa sekä kuvien välisinä että blokin ja kohdekoordinaatiston välisinä liitospistehavaintoina. Suhteellinen kinemaattinen GPS o Kuvauskoneeseen sijoitetun antennin jatkuvaa paikantamista lennon aikana, suhteessa kiinteään maa-asemaan. b b / 3) / 3) 9
10 o Kuvan projektiokeskuksen paikantamista jonolla, suhteessa naapurikuvaan ja kuvajonon paikantamista blokissa, suhteessa naapurijonoon. o Havainnot talletetaan lennon aikana massamuistiin ja prosessoidaan myöhemmin.tarkat kuvanottopaikat interpoloidaan GPS-havainnoista, mikä edellyttää sekä kameran sulkimen että GPS-vastaanottimen tahdistamista ajanmittaukseen. Maastoon merkittävien kiinto- eli runkopisteiden määrä on oleellisesti pienempi kuin ilmakolmioinnissa. Ilmakolmioinnin luonne muuttuu karttarungon tihentämisestä kuvien ulkoisten orientointien määrittämiseksi. Simuloimalla on voitu osoittaa, että GPS-havaintoihin tukeutuva kolmiointi tuottaa tarkkuudeltaan erittäin homogeenisia blokkeja eikä tarkkuus riipu blokin koosta. Samaan tarkkuuteen päästään perinteisellä ilmakolmioinnilla ainoastaan lähtöpisteiltään hyvin tiheissä blokeissa. GPS-tuetuissa blokeissa kuvien projektiokeskukset voidaan määrittää 5-10 cm:n tarkkuudella. Koska tämä perustuu GPS-havaintojen sisäiseen tarkkuuteen eikä ulkoiseen, hyvä tarkkuus saavutetaan vasta blokkitasoituksen myötä. Ulkoisen orientoinnin määritystarkkuus ei myöskään riipu kuvauskorkeudesta eikä kuvamittakaavasta. GPS-kolmiointi soveltuukin käytännössä kaikkiin kartoitustehtäviin alkaen mittakaavasta 1:1'000. o Simuloimalla on voitu osoittaa, että GPS-tuetun blokin tarkkuutta voidaan teoriassa arvioida vaakatasossa lausekkeella 1.5 s ja korkeudessa.0 s, missä s on mittakaavaluku. (Ackermann, 1994) o Käytännön koetöissä on päästy samaan tulokseen. Yhdeksässä GPS-tuetussa blokissa uusien pisteiden koordinaatteja verrattiin maastossa tehtyihin tarkastusmittauksiin ja saatiin koordinaattien poikkeamiksi 1.5 s tasossa ja. s korkeudessa. Vastaavaan tulokseen on päästy OEEPE:n selvityksessä, missä tarkastettiin 15 GPS-tuettua pistetihennysblokkia mittakaavoissa 1:3'300-50'000. Havainnot kerättiin käytännön kartoitustöistä viidestä eri maasta ja kaikissa käytettiin ylimääräisiä poikittaisia kuvausjonoja. (Ackermann, 1994). GPS-havaintoja käytetään myös kuvauslennon navigoimiseen. Navigointia ohjataan kuvaussuunnitelman mukaisilla reittitiedoilla. Navigoinnin paikantamisepätarkkuus saa olla korkeintaan 5 mm kuvalla, mikä vastaa esim. 50 m kuvamittakaavassa 1: Mittaustapa on koodipseudoetäisyyksien havaitsemiseen perustuvaa absoluuttista paikannusta tai differentiaalista paikannusta (DGPS), jossa reaaliaikaisesti hyödynnetään radioteitse saatavaa korjaussignaalia. Suunniteltu ja laskettu reitti näytetään lentäjälle ja navigaattorille. Kameran laukaistaan suunnitellun kuvanottopaikan koordinaattien mukaan, ei peittosäätimen perusteella. Täsmäkuvaus täydentyy nykyaikaisen ilmakuvakameran kamera- ja kuvaliikkeiden kompensoinneilla. Ascot T-Flight Julkaisuja o GPS Global Positioning System (P. Dana) o Global Positioning System (University of Iowa) o GLONASS Global Navigation Satellite System (CSIC RSF) 10
.")



11 Aerial photography workflow. (Leica, 001). Aerial photography workflow. (Leica, 1999). Ilmakuvakamera RC30 ja hyrrästabiloitu kamerajalusta PAV30. The gyro-stabilized mount compensates for pitch, roll and drift of the aircraft, for example due to turbulence. Photography is sharper and the resultant block closer to the required flight plan. The PAV30 can be connected to aircraft navigation systems. (Leica, 1999). 11
. Leican ilmakuvauksen suunnitelu-, navigointi- ja paikannusjärjestelmä ASCOT (Aerial Survey Control Tool).")

12 Leica Aerial Camera System. GPS antenna in aircraft (1), RC30 aerial camera with PAV30 mount (), ASCOT system with GPS (3), GPS reference station (4), and software for data processing (5). (Leica, 1999). Leican ilmakuvauksen suunnitelu-, navigointi- ja paikannusjärjestelmä ASCOT (Aerial Survey Control Tool). The flight plan is transferred to on-board control computer, linked to airborne GPS. The LCD displays for pilot and camera operator give information to fly the aircraft during approaches, turns and along the planned flightlines. ASCOT takes control of both the gyro-stabilized mount and the camera. Outputs include flight reporting and GPS data for post-processing or use in triangulation systems. Ehtoyhtälöt projektiokeskuksen GPS-havainnoille. Näillä kompensoidaan GPS-havainnoissa esiintyvät systemaattiset virheet (offset ja ajan suhteen lineaariset ajautumat). Parametrit voivat olla jono, osablokki tai blokkikohtaisia. Tässä oletetaan, että kamera liikkuu kiinteästi koneen rungon suhteen, jolloin R muuttuu koneen asennon mukaan. Mikäli kuvaus on tehty käyttäen kameran kallistuksen vakaajaa, koneen ja kameran kiertomatriisit poikkeavat toisistaan ja tämä ero täytyy huomioida omana muuttujana. XGPS, YGPS,ZGPS GPS-antennin sijainti kuvaushetkellä (vaihekeskipiste) X0, Y0, Z0 kameran projektiokeskuksen sijainti dx, dy, dz antennin ja kameran välinen siirtovektori kamerakoordinaatistossa 1
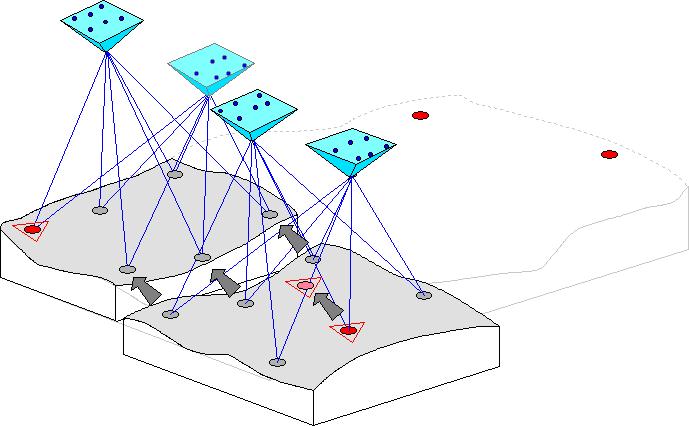
 verrattuna referenssihetkeen to (kuvaushetki jonon ensimmäiselle kuvalle) FM-Internationalin kuvaama GPS-blokki Nepalissa.")
13 R ax, ay, az bx, by, bz kiertomatriisia kamerasta kohteeseen GPS-havaintojen vakiovirhe (shift, siirtymä jonolla k,) GPS-havaintojen ajan mukana lineaarisesti muuttuva virhe (drift, liukuma) hetkellä t (kuvaushetki) verrattuna referenssihetkeen to (kuvaushetki jonon ensimmäiselle kuvalle) FM-Internationalin kuvaama GPS-blokki Nepalissa. Poikittaiset jonot ovat GPShavainnointiin liittyviä tukijonoja. Blokissa on kaikkiaan 35 kuvaa. Ilmakolmioinnin blokkitasoitus tehtiin kahdessa osassa. Tasoituksen jälkeiset lähtöpisteiden jäännösvirheet olivat toisessa puoliblokissa X- ja Y-koordinaateille m ja Z-koordinaateille 1.3 m. Projektiokeskusten jäännösvirheiden RMS-arvot olivat X 0.06 m, Y m ja Z 0.40 m. Kolmiointiblokki tasoitettiin maanmittauslaitoksen ohjelmalla 'MMH850-GPS'. (Kimmo Nurminen, 1995) Viitteet o Kimmo Nurminen, GPS ja blokkikolmiointi, Fotogrammetrian, kaukokartoituksen ja kuvatulkinnan seminaariesitelmät 1995, Espoo, Simulointi Kolmiointi ilman ulkoisia orientointihavaintoja, testejä 1970: 13
14 Blokin geometria ja lähtöpisteet. Mean planimetric accuracy Mean height accuracy Where P1: P: P3: P4: p=60%, q=0% µ L 0.9σ 0 µ L ( n) σ 0 µ L ( n) σ 0 µ L 0.7 n σ 0 p=q=60% µ L 0.6σ 0 µ L ( n) σ 0 µ L ( n) σ 0 µ L 0.14 n σ 0 µ Z ( i)σ 0 µ Z 0.31 i σ 0 P1: dense ground control in the block borders with i=b, P: 16 GCPs on the block borders P3: 8 GCPs on the block borders P4: 4 GCPs (1 GCP in each block corner) n = number of base lengths i = bridging distance Theoretical accuracy models for bundle blocks; c = 15 cm, errorless GCPs. 14
15 If then σ = σ σ σ s, σ σ = σ s, ( s CP' 0, CP 0 GPS 0 0 = photo scale number) µ X,Y 1.0σ 0 and µ Z 1.6σ 0, with 4 XYZ GCPs in block corners and no drift µ X,Y 1.5σ 0 and µ Z.0σ 0, with 4 XYZ GCPs, 4 Z GCPs in block corners, cross-strips and drift parameters per strip Ackermann s accuracy models for GPS-supported AT; c=15 cm, p=60%, q=0%; from Ackermann (199). Pistetihennyksen tarkkuus blokin koon ja lähtöpistegeometrian mukaan. Blokin lähtöpisteet, kun kuvaus on tehty 0-40 % sivupeitolla. XYZ-lähtöpisteet sijoitetaan blokin reunoille 4-6 kuvakannan välein. Blokki tuetaan korkeustukipisteillä, joita tarvitaan jonojen suunnassa 4 kannan välein, poikkisuunnassa joka saumassa. Blokin lähtöpisteet, kun kuvaus on tehty 60 % sivupeitolla. XYZ-lähtöpisteet sijoitetaan blokin reunoille kuten edellisessä, mutta korkeustukipisteitä tarvitaan vähemmän, eli yli koko blokin 4 kannan välein. 15
16 Blokin lähtöpisteet, kun kuvaus on tehty 0-40 % sivupeitolla ja ylimääräisillä, poikittaiset korkeustukipistejonot korvavilla poikittaisilla kuvausjonoilla. Blokin lähtöpisteet, kun kuvaus on tehty 0-40 % sivupeitolla ja blokkitasoitus tuettu GPShavainnoilla. Mukana myös poikittaiset kuvajonot Tässä blokissa lähtöpisteet on sijoitettu reunoille seitsemän kuvakannan välein. Virhe-ellipsit kuvaavat ilmakolmioinnin avulla määritettyjen uusien pisteiden tasokoordinaattien virheitä. 16
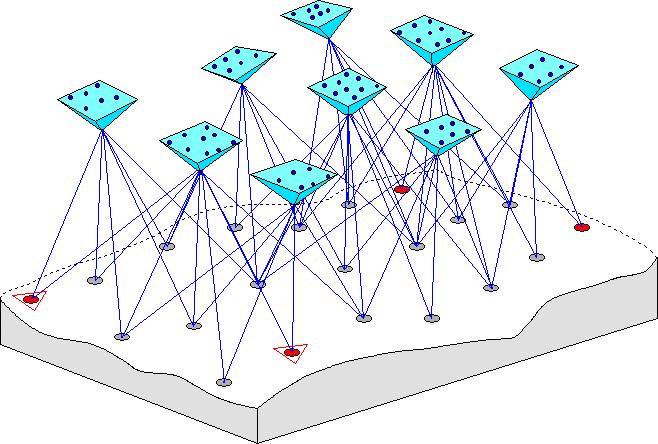
17 Kuvien väliset peitot ovat sekä jono- että sivusuunnassa 60%. Kuvien väliset liitospisteet näkyvät tällöin aina yhdeksällä kuvalla paitsi blokin reunoilla ja nurkissa, jossa sama piste näkyy vähimmillään vain kahdella kuvalla. Blokin sisällä blokin geometria on kauttaaltaan hyvä ja pisteet määrittyvät lähes yhtä tarkasti riippumatta siitä, miten etäällä ollaan blokin reunasta. Blokin reunoilla epätarkkuus lisääntyy nopeasti (edge effect). Ilmiö korostuu, kun mitataan uusia pisteitä lähtöpisteiden rajoittaman alueen ulkopuolella. Mikäli tässä blokissa lähtöpisteet korvattaisiin GPS-havainnoilla, virhe-ellipseissä muutokset olisivat vähäiset. Saman blokin virhevektorit korkeuskoordinaateissa. Epätarkkuus lisääntyy tasaisesti sitä mukaa, kun etäännytään lähtöpisteistä. Blokki deformoituu. Korkeuskoordinaattien tarkkuus paranee, kun blokin sisällä mitataan lisää korkeustukipisteitä. Kun lähtöpisteet korvataan GPS-havainnoilla, blokin deformaatio on vähäistä. Kameran projektiokeskukset toimivat korkeustukipisteinä. 17
18 Tämä blokki on kuvattu yhtenä jonona ja lähtöpisteet on sijoitettu vain jonon toiseen päähän. Uusien pisteiden tasokoordinaattien virheet kasvavat nopeasti. Kun blokkia tuetaan GPShavainnoilla, tarkkuus paranee. Virhe-ellipsit suuntautuvat jonon poikki. Korkeuskoordinaatin epätarkkuus kasvaa jonollakin tasokoordinaatteja nopeammin. Kun blokkia tuetaan GPS-havainnoilla, deformaatiota ei esiinny. 18
19 Viitteet o James R. Lucas, Covariance Propagation in Kinematic GPS Photogrammetry, Manual of Photogrammetry Addendum, American Society for Photogrammetry and Remote Sensing, Bethesda, Maryland, 1996, p Direct sensor orientation Suora sensoriorientointi mahdollistaa nopean ja joustavan tiedonkeruun ja prosessoinnin. Monien kaukokartoitusaineistojen tapauksessa, mm. laserkeilaus, SAR, CCD-rivigeometriaan tai pieniin CCD-matriiseihin perustuvat kuvat (esim. ADS40, HRSC-AX), suora sensoriorientointi on välttämätöntä, jotta kuvia voitaisiin taloudellisesti hyödyntää. GPS/IMU tuleekin olemaan standardi osa tulevaisuuden kuvausjärjestelmiä. Kartoitussovellutusten osalta vaikeiden kohteiden, kuten tekstuurittomat alueet (vesi, aavikko), metsä, rannikkoalueet, tulva-alueet sekä jonomaiset kohteet, kartoitus helpottuu oleellisesti. Voidaankin sanoa, että suora sensoriorientointi avaa täysin uusia mahdollisuuksia sekä sensorien kehityksen että kartoituksen saroilla. Perinteisten ilmakuvien ja perinteisen kartoituksen tapauksessa suora sensoriorientointi on vaihtoehto, jonka kustannustehokkuutta arvioidaan paraikaa. On selvää, että GPS/IMU-havaintojen optimaalinen hyödyntäminen tehostaa radikaalisti perinteisten ilmakuvien prosessointia. Käytännön kokemusten perusteella suoran georeferoinnin tarkkuus on riittävä ortokuvatuotantoon. Suoraan georeferoiduilla stereomalleilla sen sijaan ilmenee haitallisen suuria parallakseja (15-0 µm). Odotettavissa on, että GPS/IMU tulee pian olemaan standardi osa myös perinteisillä ilmakuvilla tehtävää kartoitusta. Luotettavuussyistä ilmakolmiointia tullaan kuitenkin käyttämään jossakin muodossa suoran sensoriorientoinnin ohessa tarkkuutta vaativissa sovellutuksissa. Suoran georeferoinnin ongelma on luotettavuus. Käytännön kokeet ovat osoittaneet, että GPS/IMU-ratkaisun tarkkuus on ennen kaikkea riippuvainen GPS:n tarkkuudesta. GPS:n potentiaalisia ongelmia ovat mm. vaihekatkokset, kokonaislukutuntemattomien ratkaisu, monitieheijastukset ja ilmakehä. Suora georeferointi on ekstrapolointia ja edellytys on, että kuvautumisen matemaattinen malli ja sen suureet tunnetaan tarkasti. Mahdolliset virheet siirtyvät suoraan määritettyihin maastokoordinaatteihin. Ulkoisen orientoinnin epäluotettavuuden lisäksi mahdollisia ongelmakohtia ovat mm. kamerakalibrointi, GPS/IMU-systeemin kalibrointi ja erilaiset kuvautumiseen vaikuttavat fysikaaliset ilmiöt. Myös mm. painovoima, koordinaatistot ja koordinaatistomuunnokset voivat aiheuttaa ongelmia. Perinteinen blokkitasoitus on tarjonnut keinot näiden ongelmien torjumiseksi. ks. myös luento 4, kalibrointi. Suora sensoriorientointi on laitteistojen ja laskennan puolesta operationaalista tekniikkaa, vaikkakin järjestelmiä kehitetään edelleen. Toimintamalleista, systeemien suorituskyvystä jne. tehdään kiivaasti tutkimusta. Kokeellisia tuloksia GPS/IMU:n käytöstä on raportoitu vuodesta 1997 lähtien. Laitteistot ovat yleistymässä käytännön sovellutuksissa. Inertial measurement unit (IMU) o IMU:n tehtävä on määrittää sijainti, kallistukset ja nopeus itsenäisesti perustuen inertia-lakiin. Laitteistoon kuuluu kolme kulmanopeutta mittaavaa gyroa, kolme lineaarista kiihtyvyyttä mittaavaa kiihtyvyysmittaria, digitointimikropiirit sekä tietokone navigointiohjelmistoineen. 19
20 o Yksinkertaistettuna orientointien määritys tapahtuu seuraavasti. Aluksi initialisoidaan systeemi (sijainti ja nopeus, navigointikoordinaatisto). Gyrojen avulla mitatuista kulmanopeuksista eliminoidaan systemaattiset virheet ja maan pyörimisliikken vaikutus, ja tämän jälkeen integroimalla saadaan määritettyä sensorin kallistukset. Lineaarisista kiihtyvyyksistä poistetaan painovoiman vaikutus sekä systemaattiset virheet, ja kahdesti integroimalla saadaan määritettyä sensorin nopeus ja sijainti. Ilmakuvaussovelluksissa käytetään kameran ulkopuolelle asennettavaa erillistä IMU-yksikköä, jonka akselit seuraavat koneen liikettä (strapdown). Käytössä olevat gyrotyypit ovat: fibre optics gyro (FOG), ring laser gyro (RLG) ja dry tuned gyro (DTG). Näistä RLG on tarkin. Uusia gyrotyyppejä kehitellään. o Purpose autonomous determination of sensor position and attitude based on law of inertia o Components three gyros mounted on mutually orthogonal axes, measuring angular velocity three accelerometers mounted on the gyro axes measuring linear accelerations Processing of strapdown navigation measurements (Heipke, 001) o IMU output, usually in time-dependent body frame three components of specific force vector three components of angular velocity o Goal: position, velocity and attitude in an Earth-fixed map frame o Procedure determine initial attitude (alignment procedure) correct measured angular velocity for Earth rotation (transformation from body frame to Earth-fixed map frame) integrate angular velocity to obtain attitude transform specific force into Earth-fixed map frame subtract gravity to obtain vehicle acceleration integrate once with respect to time (yielding velocity) and again (yielding position) o Earth fixed map frame, usually local geodetic or cartesian geocentric GPS / IMU integration (Heipke, 001) o IMU measurements exhibit time-dependent systematic errors analytical or numerical time integration process errors can increase quickly and can become rather large o GPS problems multi path, troposphere, cycle slips, o GPS / IMU integration compare IMU positions to GPS positions derive calibration parameters self calibration for gyros and accelerometers high frequency interpolation for GPS trajectories possibility to overcome problems of GPS solution Miksi GPS/IMU o GPS: +Good long-term accuracy Low frequency (1- Hz) 0
21 Cycle slips, multipath Poor rotation accuracy (multi antenna systems) o IMU +High short-term accuracy +Accurate rotation information +High frequency Poor long-term accuracy, systematic errors o GPS/IMU +Positions and rotations +Good long-term and short-term accuracy +High frequency System components o Airplane GPS-receiver IMU (Inertial Measurement Unit) PC + navigation software o Ground 1 or more GPS base stations <50 km distance o Post processing software Carrier phase differential GPS solution GPS/IMU integration by Kalman filtering X0, Y0, Z0, omega, phi, kappa for every camera position Systems for direct sensor orientation o Applanix POS/AV mbh AEROcontrol IId Performance of systems o Position: 5-10 cm o Attitude: roll, pitch: heading: o Comparison to AT (e.g. 1:4 000) Position: cm, omega, phi: 0.00, kappa: What limits DG accuracy o DG is extrapolation, Any error in the imaging model affects directly the ground coordinates o Error sources include: GPS/IMU accuracy Modelling of imaging Camera calibration (x0, y0, c) System calibration: IMU to sensor boresight, lever arm, timing Datum issues, projection distortions Imaging sensor resolution and accuracy o In the AT these errors are absorbed to the orientation parametersgps/imu/kamera systeemin kalibrointi on yksi suoran georeferoinnin kriittinen vaihe (Luento 4) Suomessa Maanmittauslaitos on varustanut kuvauskoneensa Applanix POSAV 510 järjestelmillä ( 1
 r i c (t) vector of image coordinates of P i in camera")
22 Systeemin komponentit System of direct georeferencing. (Heipke, 001) r i c (t) vector of image coordinates of P i in camera frame, measured

 Accuracies of gyro.")
23 b R c s i r b R b m (t) r IMU/GPS m (t) r i m rotation matrix from camera to body frame, calibrated scale factor, e. g. from stereo or laser scanning vector of offset between projection centre of imaging sensor and centre of mass of IMU, in body frame, calibrated rotation matrix from body to map frame, from GPS/IMU measurements vector of IMU centre of mass in map frame, from GPS/IMU measurements vector of the coordinates of the point to be determined in the map frame, unknown Positioning equation. (Heipke, 001) Accuracies of gyro. (Heipke, 001) Inertial Measurement Unit (IMU), model Litton LN-00. (Heipke, 001) 3
 Unknowns Observations Knowns Mathematical model of")
24 Accuracies of IMU systems. (Heipke, 001) Unknowns Observations Knowns Mathematical model of strapdown inertial navigation. (Heipke, 001) 4
25 Additional parameters GPS/IMU-integrointi Mathematical model for GPS/IMU integration. (Heipke, 001) Laskenta tehdään kahdessa vaiheessa. Kuvauksen aikana suoritetaan reaaliaikaista laskentaa navigointia varten ja kuvauslennon jälkeen suoritetaan jälkilaskenta, jonka lopputuloksena saadaan tarkka orientointitieto. Liikeradat saadaan yleensä Hz taajuudella. Optimaalinen tapa GPS ja IMU havaintojen yhdistämiseksi on Kalman-estimointi. Laskentamenetelmiä kehitetään vielä. Kalman-estimointia varten muodostetaan differentiaaliyhtälöt. Yhtälöissä tuntemattomia ovat ainakin navigointivirheet (9 kpl: sijainti, nopeus, kallistukset), gyrojen ryömintä (gyro drift, 3 kpl) ja kiihtyvyysmittareiden systemaattinen virhe (accelerometer bias, 3 kpl). Mallia voidaan laajentaa edelleen (mm. laajempi malli IMU-virheille, ilmakehän vaikutus GPS:ään ja painovoimakenttä). Tyypillisesti virhetiloja on -35. Kalman-estimoinnin vaihtoehtoisia toteuttamismuotoja ovat hajautettu (decentralized, loosely-coupled) ja keskistetty Kalman-suodin (centralized, tightly-coupled) sekä suljettu (closed loop) tai avoin (open loop) laskenta. Keskistetyssä Kalman-suotimessa alkuperäiset GPS- ja inertiahavainnot käsitellään samanaikaisesti yhdessä suotimessa, kun taas hajautetussa tapauksessa molemmat prosessoidaan erikseen ja lopuksi yhdistetään nopeus- ja sijaintitasolla. Esimerkkejä integrointitavoista ovat täydellinen integraatio, GPS:n auttama IMU ja IMU:n auttama GPS. 5
26 Esimerkkinä tarkastellaan laskennan toteuttamista Applanix POS-järjestelmässä (kuva, Mostafa et al. 001a). Toteutusstrategia on suljettu GPS:n avustama inertiaalinavigointi. Laskenta suoritetaan sekä ajassa eteenpäin (forward time) että taaksepäin (backward time). Laskennan osat ovat 1. Strapdown inertial navigator. Määrittää IMU:n kallistukset ja sijainnit integroimalla mitatut kulmanopeudet ja lineaariset kiihtyvyydet sekä huomioimalla sensorivirheet ja maan pyörimisliikkeen ja painovoiman vaikutukset. Tärkeä tehtävä on myös systeemin alkuaseman määrittäminen (systeemin sijainti ja nopeus saadaan GPS:n avulla, navigointikoordinaatiston määrittämiseksi tulee määrittää paikallinen pohjoinen ja luotiviivan suunta).. Kalman filter. Kalman-suotimessa mallinnetaan inertiaalinavigaattorin ja IMUsensorin virheitä linearisoitujen diskreettien differentiaaliyhtälöiden avulla. GPShavainnot prosessoidaan etukäteen. Vertaamalla esim. 1 Hz taajuudella GPS:n ja inertiaalinavigaattorin antamia sijainteja nämä virheet voidaan estimoida. 3. Closed-loop error controller. Resetoi inertiaalinavigaattorin hyödyntämällä Kalmansuotimessa estimoituja parametrejä. Estimoiduilla IMU-sensorin virheillä korjataan inertiaalihavaintoja ennen integrointia (vastaa sensorien kalibrointia). Saatavan ratkaisun tarkkuus vastaa GPS-ratkaisun tarkkuutta. Tämä on myös reaaliaikaisen eteenpäinlaskennan ratkaisu (PCS). 4. Smoother (POSPac TM ). Smoother, eli jälkisuodatus, määrittää inertiaalinavigaattorin sekä IMU-sensorin virheet prosessoimalla datan taaksepäin ja yhdistämällä sen eteenpäin lasketun ratkaisun kanssa. Ratkaisussa hyödynnetään siis kaikkea havaintodataa. 5. Feed forward error controller (POSPac TM ). Jälkisuodatuksen antamia virheestimaatteja käyttäen lasketaan inertiaalinavigointiratkaisu IMU:n taajuudella. Tämä on lopullinen orientointiratkaisu, ns. the smoothed best estimate trajectory. POSPac TM Accelometers Gyros PCS Strapdown Navigator Navigator correction Position, velocity, roll, pitch, heading Feed-forward error controller Smoothed position velocity, roll, pitch, heading Closed-loop Error Controller IMU Filter corrections Estimated errors GPS receiver Kalman filter, IAR Smoother GPS base station observables GPS/IMU-integrointi Applanix:n PosAV 510 järjestelmässä (Mostafa 001). 6
27 7 Integroitu sensoriorientointi Integroitu sensoriorientointi on varteenotettava menetelmä orientointien määrittämiseen. Menetelmä perustuu blokkitasoitukseen, jossa liitospisteiden lisäksi havaintoina ovat GPS/IMU-orientoinnit sekä mahdollisesti myös maastotukipisteet. Tuntemattomia ovat kuvien ulkoiset orientoinnit ja maastopisteet sekä tarvittaessa myös kuvien sisäiset orientoinnit ja laajennetun kuvautumismallin parametrit. Lisäksi voidaan mallintaa mahdollisia GPS/IMU-orientointien systemaattisia virheitä esim. lineaarisilla malleilla. Suunnitteilla on myös laskentamenetelmiä, jossa GPS, IMU ja liitospistehavainnot käsitellään integroidusti yhdessä prosessissa. Integroitu sensoriorientointi on merkittävästi suoraa georeferointia tarkempaa ja luotettavampaa. Blokkitasoituksen myötä y-parallaksit minimoituvat, mikä helpottaa stereotulkintaa. Blokin rakenteen puitteissa voidaan myös laajentaa kuvautumismallia, ja näin saavuttaa optimaalinen tarkkuus. On huomattava, että integroitu sensoriorientointi voidaan suorittaa erittäin tehokkaasti. Liitospisteet voidaan digitaalisten kuvien tapauksessa mitata automaattisesti, ja niiden määrässä ja geometriassa voidaan tinkiä, kun GPS/IMU-orientoinnit ovat jo olemassa. Maastotukipisteiden avulla saavutetaan paras luotettavuus, jo yhdelläkin maastotukipisteellä on suuri merkitys. Projektiokeskushavainnot: yleinen malli mainingerrors i i i i i Leverarm i i i i i IMU GPS m p Datum m datum m datum Z Y X m IMU GPS t b b b t a a a Z Y X R Z Y X Z Y X R v v v Z Y X Re / / = = = + λ Kallistushavainnot t T v v v p AT y p r p IMU GPS + + = / γ β α γ β α κ ϕ ω κ ϕ ω missä T on muunnos fotogrammetrisista orientoinneista roll, pitch, yaw-järjestelmään.
28 Tuloksia RMSE (mgon) o p k OH-ACN OH-CGW Maanmittauslaitoksen kesän 00 kalibrointiblokit: GPS/IMU kulmahavaintojen ja blokkitasoituksessa määritettyjen kulmien erot (mgon) (Honkavaara et al. 003). omega (mgon) phi (mgon) kappa (mgon) Attitude differences: 18 (mgon) (Honkavaara et al. 003). 0.0 X0 (m) 0.0 Y0 (m) 0.0 Z0 (m) Position differences: 1 (m). (RMSE, no corrections: <10 cm, RMSE, corrections: < 5 cm ) (Honkavaara et al. 003).Vertailua Modern AT, incl. GPS and automatic tie Direct geo-referencing 8
29 point generation + consistent solution for orientation and + solution adapted to multi-sensor subsequent tasks (point determination, DTM geometry generation, orthoprojection...) + ray intersection is a stable geometric condition + high accuracy through self calibration (needs tie points) + determination of velocity (for SAR, InSAR, FMC in digital cameras) + no restrictions concerning block geometry + compensation of inaccurate elements of + high degree of automation interior orientation through high correlation between interior and exterior orientation + long GPS baselines can be used (if sufficient GCP are available) + real-time potential + reliable solution through GCP + processing of single image pairs feasible + no necessity for GCP Modern AT, incl. GPS and automatic tie point generation - problems in areas with weaker geometry (block border, coastal areas, non-accessible areas, cameras with small viewing angle, line cameras,...) Direct geo-referencing - less accurate due to missing possibility of self calibration - problems with partial cloud cover - currently limited to GPS performance - image texture needed - due to missing redundancy of GPS / IMU reliability of results may be a problem - human operator must check and/or edit automatically derived tie points - complex system calibration, needs to be carried out rather often - relatively slow process - long GPS baselines may deteriorate results - GCP needed Viitteet o Kimmo Pajula, 001. GPS/INS-paikannus, TKK, fotogrammetrian erikoistyö, Espoo 001. o Christian Heipke, 001. Direct georeferencing and integrated sensor orientation - will they beat aerial triangulation? Research seminar: Seminar, Helsinki University of Technology, o Honkavaara, E., Ilves R., Jaakkola, J., 003. Practical Results of GPS/IMU/camera System Calibration. In. Proceedings of Workshop: Theory, Technology and Realities of Inertial/GPS Sensor Orientation. Castelldefels, September -3,
30 o Mostafa, M., Hutton, J., B. Reid, 001a. GPS/IMU products the Applanix approach. In: Fritsch/Spiller (eds.): Photogrammetric Week 001, Wichmann Verlag, Heidelberg, Germany, p o Maa-57.0 Fotogrammetrinen kartoitus Luento-ohjelma
Luento 8: Kolmiointi AIHEITA. Kolmiointi. Maa-57.301 Fotogrammetrian yleiskurssi. Luento-ohjelma 1 2 3 4 5 6 7 8 9 10
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Luento 4 Georeferointi
 Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi Maa Fotogrammetrian perusteet 1
 Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
FOTOGRAMMETRINEN PISTETIHENNYS
 FOTOGRAMMETRINEN PISTETIHENNYS 1. Yleistä 2. Ilmakuvaus SKM Gisair Oy Työssä määritettiin ulkoinen orientointi Sotkamon kunnan keskustan alueen ilmakuvaukselle. Ilmakuvauksen teki SKM Gisair Oy keväällä
FOTOGRAMMETRINEN PISTETIHENNYS 1. Yleistä 2. Ilmakuvaus SKM Gisair Oy Työssä määritettiin ulkoinen orientointi Sotkamon kunnan keskustan alueen ilmakuvaukselle. Ilmakuvauksen teki SKM Gisair Oy keväällä
Luento 11: Stereomallin ulkoinen orientointi
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Fotogrammetrian termistöä
 Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Luento 6: Stereo- ja jonomallin muodostaminen
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Luento Fotogrammetrian perusteet. Henrik Haggrén
 Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Luento 7: Kuvan ulkoinen orientointi
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Luento 6: 3-D koordinaatit
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Luento 7: Fotogrammetrinen mittausprosessi
 7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
Luento 3: Kuvahavainnot
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Luento 4: Kolmiointihavainnot
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Teoreettisia perusteita II
 Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Luento 6 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 4: Kolmiointihavainnot
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Luento 6: Kolmiointi digitoiduin kuvin.
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: Kolmiointi digitoiduin kuvin. Luento 6: Kolmiointi digitoiduin kuvin. Liitospisteiden mittaus Kuvien yhteensovitus
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: Kolmiointi digitoiduin kuvin. Luento 6: Kolmiointi digitoiduin kuvin. Liitospisteiden mittaus Kuvien yhteensovitus
Luento 5. Stereomittauksen tarkkuus Maa Fotogrammetrian perusteet 1
 Luento 5 Stereomittauksen tarkkuus 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin
Luento 5 Stereomittauksen tarkkuus 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin
Luento 6: Kolmiointi digitoiduin kuvin.
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: Kolmiointi digitoiduin kuvin. Luento 6: Kolmiointi digitoiduin kuvin. Kolmiointi digitoiduin kuvin Liitospisteiden
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: Kolmiointi digitoiduin kuvin. Luento 6: Kolmiointi digitoiduin kuvin. Kolmiointi digitoiduin kuvin Liitospisteiden
Maa-57.260. Kameran kalibrointi. TKK/Fotogrammetria/PP
 Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Luento 2 Stereokuvan laskeminen. 2008 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Mittaushavaintojen täsmällinen käsittelymenenetelmä
 Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
Suuriformaattiset digitaaliset ilmakuvakamerat
 Maa 57.270, Fotogrammetrian, kaukokartoituksen ja kuvantulkinnan seminaari Suuriformaattiset digitaaliset ilmakuvakamerat 2007 Lauri Saarinen Sisällysluettelo 1 Johdanto...3 2 Digitaalinen ilmakuvakamera...3
Maa 57.270, Fotogrammetrian, kaukokartoituksen ja kuvantulkinnan seminaari Suuriformaattiset digitaaliset ilmakuvakamerat 2007 Lauri Saarinen Sisällysluettelo 1 Johdanto...3 2 Digitaalinen ilmakuvakamera...3
Maa-57.1030 Fotogrammetrian perusteet
 Maa-57.1030 Fotogrammetrian perusteet Luento 8 Kartoitussovellukset Petri Rönnholm/Henrik Haggrén Mitä fotogrammetrisella kartoituksella tuotetaan? 3D koordinaatteja kohteesta Maaston korkeusmalli Topograafiset
Maa-57.1030 Fotogrammetrian perusteet Luento 8 Kartoitussovellukset Petri Rönnholm/Henrik Haggrén Mitä fotogrammetrisella kartoituksella tuotetaan? 3D koordinaatteja kohteesta Maaston korkeusmalli Topograafiset
Luento 5: Stereoskooppinen mittaaminen
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Huom. tämä kulma on yhtä suuri kuin ohjauskulman muutos. lasketaan ajoneuvon keskipisteen ympyräkaaren jänteen pituus
 AS-84.327 Paikannus- ja navigointimenetelmät Ratkaisut 2.. a) Kun kuvan ajoneuvon kumpaakin pyörää pyöritetään tasaisella nopeudella, ajoneuvon rata on ympyränkaaren segmentin muotoinen. Hitaammin kulkeva
AS-84.327 Paikannus- ja navigointimenetelmät Ratkaisut 2.. a) Kun kuvan ajoneuvon kumpaakin pyörää pyöritetään tasaisella nopeudella, ajoneuvon rata on ympyränkaaren segmentin muotoinen. Hitaammin kulkeva
Luento 7 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Laitetekniset vaatimukset ammattimaiselle dronetoiminnalle. Sakari Mäenpää
 Laitetekniset vaatimukset ammattimaiselle dronetoiminnalle Sakari Mäenpää Lopputulokseen vaikuttavat tekijät Kalusto Olosuhteet Ammattitaito Kuvauskohde Hyvä suunnitelma = onnistunut lopputulos Olosuhteet,
Laitetekniset vaatimukset ammattimaiselle dronetoiminnalle Sakari Mäenpää Lopputulokseen vaikuttavat tekijät Kalusto Olosuhteet Ammattitaito Kuvauskohde Hyvä suunnitelma = onnistunut lopputulos Olosuhteet,
Luento 4: Kiertomatriisi
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
GNSS-vastaanottimet. Havaintosuureet
 GNSS-vastaanottimet vastanottimien tyyppejä antennit signaalin havaitseminen Havaintosuureet Nyt: C/A-koodi L1 L1-kantoaalto L1 Doppler L2 kantoaalto L2 Doppler P-koodi L1 P-koodi L2 Tulevaisuudessa: C/A-koodi
GNSS-vastaanottimet vastanottimien tyyppejä antennit signaalin havaitseminen Havaintosuureet Nyt: C/A-koodi L1 L1-kantoaalto L1 Doppler L2 kantoaalto L2 Doppler P-koodi L1 P-koodi L2 Tulevaisuudessa: C/A-koodi
Luento 2: Kuvakoordinaattien mittaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 14.9.2005) Luento 2: Kuvakoordinaattien mittaus Mitä pitäisi oppia? Muunnokset informaatiokanavassa (osin kertausta) Erotella kuvaan ja
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 14.9.2005) Luento 2: Kuvakoordinaattien mittaus Mitä pitäisi oppia? Muunnokset informaatiokanavassa (osin kertausta) Erotella kuvaan ja
Ilmakolmioinnin laadunvalvonta fotogrammetristen pintamallien ja laserkeilausaineiston avulla
 Ilmakolmioinnin laadunvalvonta fotogrammetristen pintamallien ja laserkeilausaineiston avulla Aalto-yliopiston insinööritieteiden korkeakoulun maankäyttötieteiden laitoksella tehty diplomityö Espoo, toukokuu
Ilmakolmioinnin laadunvalvonta fotogrammetristen pintamallien ja laserkeilausaineiston avulla Aalto-yliopiston insinööritieteiden korkeakoulun maankäyttötieteiden laitoksella tehty diplomityö Espoo, toukokuu
KONEISTUSKOKOONPANON TEKEMINEN NX10-YMPÄRISTÖSSÄ
 KONEISTUSKOKOONPANON TEKEMINEN NX10-YMPÄRISTÖSSÄ https://community.plm.automation.siemens.com/t5/tech-tips- Knowledge-Base-NX/How-to-simulate-any-G-code-file-in-NX- CAM/ta-p/3340 Koneistusympäristön määrittely
KONEISTUSKOKOONPANON TEKEMINEN NX10-YMPÄRISTÖSSÄ https://community.plm.automation.siemens.com/t5/tech-tips- Knowledge-Base-NX/How-to-simulate-any-G-code-file-in-NX- CAM/ta-p/3340 Koneistusympäristön määrittely
Luento 9 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Radanrakentamisen 3D-lähtötietomallin mittaus (Case Jorvas, UAS)
") RYM PRE InfraFINBIM, Pilottipäivä nro 5, 3.10.2012 VTT, Vuorimiehentie 3, Espoo Radanrakentamisen 3D-lähtötietomallin mittaus (Case Jorvas, UAS) Rauno Heikkilä, Oulun yliopisto Tausta 3D-lähtötietojen
RYM PRE InfraFINBIM, Pilottipäivä nro 5, 3.10.2012 VTT, Vuorimiehentie 3, Espoo Radanrakentamisen 3D-lähtötietomallin mittaus (Case Jorvas, UAS) Rauno Heikkilä, Oulun yliopisto Tausta 3D-lähtötietojen
Mobiilikartoitusdatan prosessointi ja hyödyntäminen
 Mobiilikartoitusdatan prosessointi ja hyödyntäminen Alkuprosessointi - Vaiheet 1. Ajoradan jälkilaskenta 2. Havaintodatan korjaus 3. RGB-värjäys 4. Tukipisteiden käyttö Ajoradan jälkilaskenta Korjataan
Mobiilikartoitusdatan prosessointi ja hyödyntäminen Alkuprosessointi - Vaiheet 1. Ajoradan jälkilaskenta 2. Havaintodatan korjaus 3. RGB-värjäys 4. Tukipisteiden käyttö Ajoradan jälkilaskenta Korjataan
www.terrasolid.com Kaupunkimallit
 www.terrasolid.com Kaupunkimallit Arttu Soininen 03.12.2015 Vuonna 1993 Isoja askeleita 1993-2015 Laserkeilaus helikopterilla/lentokoneella Laserkeilaus paikaltaan GPS+IMU yleistynyt kaikkeen ilmasta mittaukseen
www.terrasolid.com Kaupunkimallit Arttu Soininen 03.12.2015 Vuonna 1993 Isoja askeleita 1993-2015 Laserkeilaus helikopterilla/lentokoneella Laserkeilaus paikaltaan GPS+IMU yleistynyt kaikkeen ilmasta mittaukseen
KMTK lentoestetyöpaja - Osa 2
 KMTK lentoestetyöpaja - Osa 2 Veijo Pätynen 18.10.2016 Pasila YHTEISTYÖSSÄ: Ilmailun paikkatiedon hallintamalli Ilmailun paikkatiedon hallintamalli (v0.9 4.3.2016) 4.4 Maanmittauslaitoksen rooli ja vastuut...
KMTK lentoestetyöpaja - Osa 2 Veijo Pätynen 18.10.2016 Pasila YHTEISTYÖSSÄ: Ilmailun paikkatiedon hallintamalli Ilmailun paikkatiedon hallintamalli (v0.9 4.3.2016) 4.4 Maanmittauslaitoksen rooli ja vastuut...
Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 13.10.2004) Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus AIHEITA Stereomittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 13.10.2004) Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus AIHEITA Stereomittaus
Capacity Utilization
 Capacity Utilization Tim Schöneberg 28th November Agenda Introduction Fixed and variable input ressources Technical capacity utilization Price based capacity utilization measure Long run and short run
Capacity Utilization Tim Schöneberg 28th November Agenda Introduction Fixed and variable input ressources Technical capacity utilization Price based capacity utilization measure Long run and short run
Luento 10 3-D maailma. fotogrammetriaan ja kaukokartoitukseen
 Luento 10 3-D maailma 1 Luennot 2007 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 10 3-D maailma 1 Luennot 2007 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Matematiikka ja teknologia, kevät 2011
 Matematiikka ja teknologia, kevät 2011 Peter Hästö 13. tammikuuta 2011 Matemaattisten tieteiden laitos Tarkoitus Kurssin tarkoituksena on tutustuttaa ja käydä läpi eräisiin teknologisiin sovelluksiin liittyvää
Matematiikka ja teknologia, kevät 2011 Peter Hästö 13. tammikuuta 2011 Matemaattisten tieteiden laitos Tarkoitus Kurssin tarkoituksena on tutustuttaa ja käydä läpi eräisiin teknologisiin sovelluksiin liittyvää
Metsikön rakenteen ennustaminen 3D-kaukokartoituksella
 8.10.2017 1 Metsikön rakenteen ennustaminen 3D-kaukokartoituksella Dosentti (MMT) Mikko Vastaranta Metsätieteiden laitos, Helsingin yliopisto Laserkeilaustutkimuksen huippuyksikkö mikko.vastaranta@helsinki.fi
8.10.2017 1 Metsikön rakenteen ennustaminen 3D-kaukokartoituksella Dosentti (MMT) Mikko Vastaranta Metsätieteiden laitos, Helsingin yliopisto Laserkeilaustutkimuksen huippuyksikkö mikko.vastaranta@helsinki.fi
Luento 10: Optinen 3-D mittaus ja laserkeilaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen
 Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen Mittausten laadun tarkastus ja muunnoskertoimien laskenta Kyösti Laamanen 2.0 4.10.2013 Prosito 1 (9) SISÄLTÖ 1 YLEISTÄ...
Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen Mittausten laadun tarkastus ja muunnoskertoimien laskenta Kyösti Laamanen 2.0 4.10.2013 Prosito 1 (9) SISÄLTÖ 1 YLEISTÄ...
Alternative DEA Models
 Mat-2.4142 Alternative DEA Models 19.9.2007 Table of Contents Banker-Charnes-Cooper Model Additive Model Example Data Home assignment BCC Model (Banker-Charnes-Cooper) production frontiers spanned by convex
Mat-2.4142 Alternative DEA Models 19.9.2007 Table of Contents Banker-Charnes-Cooper Model Additive Model Example Data Home assignment BCC Model (Banker-Charnes-Cooper) production frontiers spanned by convex
Luento 7 Stereokartoituskojeet. 2007 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 7 Stereokartoituskojeet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2 Fotogrammetrinen prosessi 3 Stereokartoituskoje Stereokartoituskojeessa kuvaparin stereoskooppinen tarkastelu ja tarkka
Luento 7 Stereokartoituskojeet 1 Stereokartoitus (Hannu Hyyppä, Petri Rönnholm, TKK) 2 Fotogrammetrinen prosessi 3 Stereokartoituskoje Stereokartoituskojeessa kuvaparin stereoskooppinen tarkastelu ja tarkka
Efficiency change over time
 Efficiency change over time Heikki Tikanmäki Optimointiopin seminaari 14.11.2007 Contents Introduction (11.1) Window analysis (11.2) Example, application, analysis Malmquist index (11.3) Dealing with panel
Efficiency change over time Heikki Tikanmäki Optimointiopin seminaari 14.11.2007 Contents Introduction (11.1) Window analysis (11.2) Example, application, analysis Malmquist index (11.3) Dealing with panel
Luento 8: Ilmakuvaus AIHEITA. Kuvauslajit. Maa-57.300 Fotogrammetrian perusteet. Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 9.2.2003, Päivityksiä: Katri Koistinen 10.2.2004) Luento 8: Ilmakuvaus AIHEITA Kuvauslajit
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 9.2.2003, Päivityksiä: Katri Koistinen 10.2.2004) Luento 8: Ilmakuvaus AIHEITA Kuvauslajit
Seurantalaskimen simulointi- ja suorituskykymallien vertailu (valmiin työn esittely) Joona Karjalainen
 Joona Karjalainen") Seurantalaskimen simulointi- ja suorituskykymallien vertailu (valmiin työn esittely) Joona Karjalainen 08.09.2014 Ohjaaja: DI Mikko Harju Valvoja: Prof. Kai Virtanen Työn saa tallentaa ja julkistaa Aalto-yliopiston
Seurantalaskimen simulointi- ja suorituskykymallien vertailu (valmiin työn esittely) Joona Karjalainen 08.09.2014 Ohjaaja: DI Mikko Harju Valvoja: Prof. Kai Virtanen Työn saa tallentaa ja julkistaa Aalto-yliopiston
The CCR Model and Production Correspondence
 The CCR Model and Production Correspondence Tim Schöneberg The 19th of September Agenda Introduction Definitions Production Possiblity Set CCR Model and the Dual Problem Input excesses and output shortfalls
The CCR Model and Production Correspondence Tim Schöneberg The 19th of September Agenda Introduction Definitions Production Possiblity Set CCR Model and the Dual Problem Input excesses and output shortfalls
LIITE 1 VIRHEEN ARVIOINNISTA
 1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
Luento 6 Mittausten suunnittelu II. erikoissovellukset
 Luento 6 Mittausten suunnittelu II 1 Aiheita Mittausongelman määrittely Tarkkuusluvut Suhteellinen tarkkuusluku Suhteellinen tarkkuus Tarkkuuden arvioiminen Kuvahavainnon keskivirhe Verkon rakennevakio
Luento 6 Mittausten suunnittelu II 1 Aiheita Mittausongelman määrittely Tarkkuusluvut Suhteellinen tarkkuusluku Suhteellinen tarkkuus Tarkkuuden arvioiminen Kuvahavainnon keskivirhe Verkon rakennevakio
Luento 2: Liikkeen kuvausta
 Luento 2: Liikkeen kuvausta Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Luennon sisältö Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Liikkeen ratkaisu kiihtyvyydestä
Luento 2: Liikkeen kuvausta Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Luennon sisältö Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Liikkeen ratkaisu kiihtyvyydestä
Fotogrammetris geodeettinen menetelmä metsäalueen tarkkaan kartoittamiseen sekä syitä ja muita keinoja maastoaineiston tarkkaan paikantamiseen
 Fotogrammetris geodeettinen menetelmä metsäalueen tarkkaan kartoittamiseen sekä syitä ja muita keinoja maastoaineiston tarkkaan paikantamiseen.. Fotogrammetrian perusteet.. LiDARin perusteet.. STRS menetelmät..
Fotogrammetris geodeettinen menetelmä metsäalueen tarkkaan kartoittamiseen sekä syitä ja muita keinoja maastoaineiston tarkkaan paikantamiseen.. Fotogrammetrian perusteet.. LiDARin perusteet.. STRS menetelmät..
Kvanttilaskenta - 2. tehtävät
 Kvanttilaskenta -. tehtävät Johannes Verwijnen January 8, 05 edx-tehtävät Vastauksissa on käytetty edx-kurssin materiaalia.. Problem The inner product of + and is. Edelleen false, kts. viikon tehtävä 6..
Kvanttilaskenta -. tehtävät Johannes Verwijnen January 8, 05 edx-tehtävät Vastauksissa on käytetty edx-kurssin materiaalia.. Problem The inner product of + and is. Edelleen false, kts. viikon tehtävä 6..
Maastokartta pistepilvenä Harri Kaartinen, Maanmittauspäivät
 Maastokartta pistepilvenä 22.3.2018 Harri Kaartinen, Maanmittauspäivät 2018 1 Sisältö Pistepilvi aineistolähteenä Aineiston keruu Aineistojen yhdistäminen ja käsittely Sovellukset 22.3.2018 Harri Kaartinen,
Maastokartta pistepilvenä 22.3.2018 Harri Kaartinen, Maanmittauspäivät 2018 1 Sisältö Pistepilvi aineistolähteenä Aineiston keruu Aineistojen yhdistäminen ja käsittely Sovellukset 22.3.2018 Harri Kaartinen,
LIITE 1 VIRHEEN ARVIOINNISTA
 1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
LYTH-CONS CONSISTENCY TRANSMITTER
 LYTH-CONS CONSISTENCY TRANSMITTER LYTH-INSTRUMENT OY has generate new consistency transmitter with blade-system to meet high technical requirements in Pulp&Paper industries. Insurmountable advantages are
LYTH-CONS CONSISTENCY TRANSMITTER LYTH-INSTRUMENT OY has generate new consistency transmitter with blade-system to meet high technical requirements in Pulp&Paper industries. Insurmountable advantages are
Paikka- ja virhe-estimaatin laskenta-algoritmit Paikannusteknologiat nyt ja tulevaisuudessa
 Paikka- ja virhe-estimaatin laskenta-algoritmit 25.8.2011 Paikannusteknologiat nyt ja tulevaisuudessa Simo Ali-Löytty, TTY, matematiikan laitos Mallinnus Pienimmän neliösumman menetelmä Lineaarinen Epälineaarinen
Paikka- ja virhe-estimaatin laskenta-algoritmit 25.8.2011 Paikannusteknologiat nyt ja tulevaisuudessa Simo Ali-Löytty, TTY, matematiikan laitos Mallinnus Pienimmän neliösumman menetelmä Lineaarinen Epälineaarinen
TERRASOLID Terrasolidin ratkaisut UAVkartoitussovelluksiin Kimmo Soukki
 www.terrasolid.com TERRASOLID Terrasolidin ratkaisut UAVkartoitussovelluksiin Kimmo Soukki 20.9.2018 SOLUTIONS FOR DATA CAPTURE Terrasolid UAV Tekniikoista Terrasolid tuotteet Fotopistepilvet UAV LiDAR
www.terrasolid.com TERRASOLID Terrasolidin ratkaisut UAVkartoitussovelluksiin Kimmo Soukki 20.9.2018 SOLUTIONS FOR DATA CAPTURE Terrasolid UAV Tekniikoista Terrasolid tuotteet Fotopistepilvet UAV LiDAR
LIITE 1 VIRHEEN ARVIOINNISTA
 Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
LIITE 1(5) TYÖOHJELMA NUMEERISEN KAAVAN POHJAKARTAN LAATIMINEN. 1. Tehtävän yleismäärittely
 TYÖOHJELMA NUMEERISEN KAAVAN POHJAKARTAN LAATIMINEN. 1. Tehtävän yleismäärittely") LIITE 1(5) TYÖOHJELMA NUMEERISEN KAAVAN POHJAKARTAN LAATIMINEN 1. Tehtävän yleismäärittely 2. Lähtötilanne Kartoituskohde Tuusulan kunta, Siippoon alue Karttatyyppi numeerinen kaavan pohjakartta Kartoitusalueen
LIITE 1(5) TYÖOHJELMA NUMEERISEN KAAVAN POHJAKARTAN LAATIMINEN 1. Tehtävän yleismäärittely 2. Lähtötilanne Kartoituskohde Tuusulan kunta, Siippoon alue Karttatyyppi numeerinen kaavan pohjakartta Kartoitusalueen
Teknillinen tiedekunta, matematiikan jaos Numeeriset menetelmät
 Numeeriset menetelmät 1. välikoe, 14.2.2009 1. Määrää matriisin 1 1 a 1 3 a a 4 a a 2 1 LU-hajotelma kaikille a R. Ratkaise LU-hajotelmaa käyttäen yhtälöryhmä Ax = b, missä b = [ 1 3 2a 2 a + 3] T. 2.
Numeeriset menetelmät 1. välikoe, 14.2.2009 1. Määrää matriisin 1 1 a 1 3 a a 4 a a 2 1 LU-hajotelma kaikille a R. Ratkaise LU-hajotelmaa käyttäen yhtälöryhmä Ax = b, missä b = [ 1 3 2a 2 a + 3] T. 2.
Maanmittauspäivät 2014 Seinäjoki
 Maanmittauspäivät 2014 Seinäjoki Parempaa tarkkuutta satelliittimittauksille EUREF/N2000 - järjestelmissä Ympäristösi parhaat tekijät 2 EUREF koordinaattijärjestelmän käyttöön otto on Suomessa sujunut
Maanmittauspäivät 2014 Seinäjoki Parempaa tarkkuutta satelliittimittauksille EUREF/N2000 - järjestelmissä Ympäristösi parhaat tekijät 2 EUREF koordinaattijärjestelmän käyttöön otto on Suomessa sujunut
TTY Mittausten koekenttä. Käyttö. Sijainti
 TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
Luento 13: Ympäristömallien tiedonkeruu
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 13: Ympäristömallien tiedonkeruu Luento 13: Ympäristömallien tiedonkeruu 3-D mallien tiedonkeruu Ilmakuvauksen
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 13: Ympäristömallien tiedonkeruu Luento 13: Ympäristömallien tiedonkeruu 3-D mallien tiedonkeruu Ilmakuvauksen
Luento 4: Liikkeen kuvausta, differentiaaliyhtälöt
 Luento 4: Liikkeen kuvausta, differentiaaliyhtälöt Digress: vakio- vs. muuttuva kiihtyvyys käytännössä Kinematiikkaa yhdessä dimensiossa taustatietoa Matlab-esittelyä 1 / 20 Luennon sisältö Digress: vakio-
Luento 4: Liikkeen kuvausta, differentiaaliyhtälöt Digress: vakio- vs. muuttuva kiihtyvyys käytännössä Kinematiikkaa yhdessä dimensiossa taustatietoa Matlab-esittelyä 1 / 20 Luennon sisältö Digress: vakio-
Puiden biomassan, puutavaralajien ja laadun ennustaminen laserkeilausaineistoista
 Puiden biomassan, puutavaralajien ja laadun ennustaminen laserkeilausaineistoista MMT Ville Kankare Metsätieteiden laitos, Helsingin yliopisto Laserkeilauksen huippuyksikkö 8.3.2016 1 Sisältö I. Biomassaositteet
Puiden biomassan, puutavaralajien ja laadun ennustaminen laserkeilausaineistoista MMT Ville Kankare Metsätieteiden laitos, Helsingin yliopisto Laserkeilauksen huippuyksikkö 8.3.2016 1 Sisältö I. Biomassaositteet
Markku.Poutanen@fgi.fi
 Global Navigation Satellite Systems GNSS Markku.Poutanen@fgi.fi Kirjallisuutta Poutanen: GPS paikanmääritys, Ursa HUOM: osin vanhentunut, ajantasaistukseen luennolla ilmoitettava materiaali (erit. suomalaiset
Global Navigation Satellite Systems GNSS Markku.Poutanen@fgi.fi Kirjallisuutta Poutanen: GPS paikanmääritys, Ursa HUOM: osin vanhentunut, ajantasaistukseen luennolla ilmoitettava materiaali (erit. suomalaiset
Mittausten suunnittelu I
 Mittausten suunnittelu I Eteenpäinleikkaukseen perustuvan mittauksen tarkkuus riippuu kahdesta asiasta (C.S. Fraser, 1996): 1) kuvaus-/tähtäyssäteen määritystarkkuudesta 2) kuvausgeometriasta Saavutettavaa
Mittausten suunnittelu I Eteenpäinleikkaukseen perustuvan mittauksen tarkkuus riippuu kahdesta asiasta (C.S. Fraser, 1996): 1) kuvaus-/tähtäyssäteen määritystarkkuudesta 2) kuvausgeometriasta Saavutettavaa
4x4cup Rastikuvien tulkinta
 4x4cup Rastikuvien tulkinta 4x4cup Control point picture guidelines Päivitetty kauden 2010 sääntöihin Updated for 2010 rules Säännöt rastikuvista Kilpailijoiden tulee kiinnittää erityistä huomiota siihen,
4x4cup Rastikuvien tulkinta 4x4cup Control point picture guidelines Päivitetty kauden 2010 sääntöihin Updated for 2010 rules Säännöt rastikuvista Kilpailijoiden tulee kiinnittää erityistä huomiota siihen,
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry)
") Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit
 JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit Versio: 1.0 Julkaistu: 6.9.2019 Voimassaoloaika: toistaiseksi 1 FIN2005N00 1.1 Mallin luonti ja tarkkuus FIN2005N00 on korkeusmuunnospinta,
JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit Versio: 1.0 Julkaistu: 6.9.2019 Voimassaoloaika: toistaiseksi 1 FIN2005N00 1.1 Mallin luonti ja tarkkuus FIN2005N00 on korkeusmuunnospinta,
Mobile Sensing VI Orientation Estimation. Spring 2015 Petteri Nurmi
 Mobile Sensing VI Orientation Estimation Spring 2015 Petteri Nurmi 9.4.2015 1 Learning Objectives Understand how the orientation of device can be characterized and represented Familiarize with the most
Mobile Sensing VI Orientation Estimation Spring 2015 Petteri Nurmi 9.4.2015 1 Learning Objectives Understand how the orientation of device can be characterized and represented Familiarize with the most
Maa-57.1030 Fotogrammetrian perusteet ILMAKUVAUS
 Maa-57.1030 Fotogrammetrian perusteet ILMAKUVAUS (Alkuperäinen luento: Henrik Haggrén 2003) (Päivitykset: Katri Koistinen 2004,Anita Laiho-Heikkinen 2007) 2008 Jussi Heikkinen, Jussi.Heikkinen@tkk.fi Ilmakuvaus
Maa-57.1030 Fotogrammetrian perusteet ILMAKUVAUS (Alkuperäinen luento: Henrik Haggrén 2003) (Päivitykset: Katri Koistinen 2004,Anita Laiho-Heikkinen 2007) 2008 Jussi Heikkinen, Jussi.Heikkinen@tkk.fi Ilmakuvaus
FIS:n timing booklet Jyväskylä Jorma Tuomimäki
 FIS:n timing booklet Jyväskylä 3.11.2018 Jorma Tuomimäki Sääntömuutoksia FIS, Timing Booklet https://data.fis-ski.com/media/services/timing-and-data/timing-booklet-cross-country-nordic-combineddraft.pdf
FIS:n timing booklet Jyväskylä 3.11.2018 Jorma Tuomimäki Sääntömuutoksia FIS, Timing Booklet https://data.fis-ski.com/media/services/timing-and-data/timing-booklet-cross-country-nordic-combineddraft.pdf
3D-kuvauksen tekniikat ja sovelluskohteet. Mikael Hornborg
 3D-kuvauksen tekniikat ja sovelluskohteet Mikael Hornborg Luennon sisältö 1. Optiset koordinaattimittauskoneet 2. 3D skannerit 3. Sovelluskohteet Johdanto Optiset mittaustekniikat perustuvat valoon ja
3D-kuvauksen tekniikat ja sovelluskohteet Mikael Hornborg Luennon sisältö 1. Optiset koordinaattimittauskoneet 2. 3D skannerit 3. Sovelluskohteet Johdanto Optiset mittaustekniikat perustuvat valoon ja
Dynaamisten systeemien teoriaa. Systeemianalyysilaboratorio II
 Dynaamisten systeemien teoriaa Systeemianalyysilaboratorio II 15.11.2017 Vakiot, sisäänmenot, ulostulot ja häiriöt Mallin vakiot Systeemiparametrit annettuja vakioita, joita ei muuteta; esim. painovoiman
Dynaamisten systeemien teoriaa Systeemianalyysilaboratorio II 15.11.2017 Vakiot, sisäänmenot, ulostulot ja häiriöt Mallin vakiot Systeemiparametrit annettuja vakioita, joita ei muuteta; esim. painovoiman
Havaitsevan tähtitieteen peruskurssi I. Datan käsittely. Jyri Lehtinen. kevät Helsingin yliopisto, Fysiikan laitos
 Datan käsittely Helsingin yliopisto, Fysiikan laitos kevät 2013 3. Datan käsittely Luennon sisältö: Havaintovirheet tähtitieteessä Korrelaatio Funktion sovitus Aikasarja-analyysi 3.1 Havaintovirheet Satunnaiset
Datan käsittely Helsingin yliopisto, Fysiikan laitos kevät 2013 3. Datan käsittely Luennon sisältö: Havaintovirheet tähtitieteessä Korrelaatio Funktion sovitus Aikasarja-analyysi 3.1 Havaintovirheet Satunnaiset
Kansallinen maastotietokanta. KMTK Kuntien tuotantoprosessit: Selvitys mobiilikartoitusmenetelmistä
 Kansallinen maastotietokanta KMTK Kuntien tuotantoprosessit: Selvitys mobiilikartoitusmenetelmistä Projektin selvitys 1 Sisältö 1 YLEISTÄ... 2 1.1 LYHENTEISTÄ JA TERMEISTÄ... 2 2 YLEISTÄ MOBIILIKARTOITUSJÄRJESTELMISTÄ...
Kansallinen maastotietokanta KMTK Kuntien tuotantoprosessit: Selvitys mobiilikartoitusmenetelmistä Projektin selvitys 1 Sisältö 1 YLEISTÄ... 2 1.1 LYHENTEISTÄ JA TERMEISTÄ... 2 2 YLEISTÄ MOBIILIKARTOITUSJÄRJESTELMISTÄ...
Garmin GPSmap 60CSx -laite
 Garmin GPSmap 60CSx -laite GPS koulutus 20.6.2007 PAIKKATIETOPAJA -hanke Näppäimet ja laitteen osat Power - virta päälle/pois, taustavalon säätö Keinunäppäin valitse vaihtoehtoja / kenttiä, syötä tietoja,
Garmin GPSmap 60CSx -laite GPS koulutus 20.6.2007 PAIKKATIETOPAJA -hanke Näppäimet ja laitteen osat Power - virta päälle/pois, taustavalon säätö Keinunäppäin valitse vaihtoehtoja / kenttiä, syötä tietoja,
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä.
 Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä.") MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016
Kymmenen vuotta maastolaserkeilaustutkimusta käytännön kokemuksia
 Kymmenen vuotta maastolaserkeilaustutkimusta käytännön kokemuksia MMT Ville, Kankare Laserkeilaustutkimuksen huippuyksikkö Metsätieteiden laitos, Helsingin yliopisto Kymmenen vuotta maastolaserkeilaustutkimusta
Kymmenen vuotta maastolaserkeilaustutkimusta käytännön kokemuksia MMT Ville, Kankare Laserkeilaustutkimuksen huippuyksikkö Metsätieteiden laitos, Helsingin yliopisto Kymmenen vuotta maastolaserkeilaustutkimusta
Anturit ja Arduino. ELEC-A4010 Sähköpaja Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka
 Anturit ja Arduino Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka Anturit ja Arduino Luennon sisältö 1. Taustaa 2. Antureiden ominaisuudet 3. AD-muunnos 4. Antureiden lukeminen Arduinolla
Anturit ja Arduino Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka Anturit ja Arduino Luennon sisältö 1. Taustaa 2. Antureiden ominaisuudet 3. AD-muunnos 4. Antureiden lukeminen Arduinolla
Ei välttämättä, se voi olla esimerkiksi Reuleaux n kolmio:
 Inversio-ongelmista Craig, Brown: Inverse problems in astronomy, Adam Hilger 1986. Havaitaan oppositiossa olevaa asteroidia. Pyörimisestä huolimatta sen kirkkaus ei muutu. Projisoitu pinta-ala pysyy ilmeisesti
Inversio-ongelmista Craig, Brown: Inverse problems in astronomy, Adam Hilger 1986. Havaitaan oppositiossa olevaa asteroidia. Pyörimisestä huolimatta sen kirkkaus ei muutu. Projisoitu pinta-ala pysyy ilmeisesti
Aki Taanila YHDEN SELITTÄJÄN REGRESSIO
 Aki Taanila YHDEN SELITTÄJÄN REGRESSIO 26.4.2011 SISÄLLYS JOHDANTO... 1 LINEAARINEN MALLI... 1 Selityskerroin... 3 Excelin funktioita... 4 EKSPONENTIAALINEN MALLI... 4 MALLIN KÄYTTÄMINEN ENNUSTAMISEEN...
Aki Taanila YHDEN SELITTÄJÄN REGRESSIO 26.4.2011 SISÄLLYS JOHDANTO... 1 LINEAARINEN MALLI... 1 Selityskerroin... 3 Excelin funktioita... 4 EKSPONENTIAALINEN MALLI... 4 MALLIN KÄYTTÄMINEN ENNUSTAMISEEN...
Pakettisynkronointitestauksen automaatio
 Pakettisynkronointitestauksen automaatio Risto Hietala valvoja: Prof. Riku Jäntti ohjaaja: DI Jonas Lundqvist ESITYKSEN RAKENNE Tietoverkkojen synkronointi Pakettikytkentäisten verkkojen synkronointi Ohjelmistotestaus
Pakettisynkronointitestauksen automaatio Risto Hietala valvoja: Prof. Riku Jäntti ohjaaja: DI Jonas Lundqvist ESITYKSEN RAKENNE Tietoverkkojen synkronointi Pakettikytkentäisten verkkojen synkronointi Ohjelmistotestaus
Regressioanalyysi. Kuusinen/Heliövaara 1
 Regressioanalyysi Kuusinen/Heliövaara 1 Regressioanalyysin idea ja tavoitteet Regressioanalyysin idea: Oletetaan, että haluamme selittää jonkin selitettävän muuttujan havaittujen arvojen vaihtelun joidenkin
Regressioanalyysi Kuusinen/Heliövaara 1 Regressioanalyysin idea ja tavoitteet Regressioanalyysin idea: Oletetaan, että haluamme selittää jonkin selitettävän muuttujan havaittujen arvojen vaihtelun joidenkin
Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia
 Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa 1 / 31 Luennon sisältö Suhteellinen translaatioliike
Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa 1 / 31 Luennon sisältö Suhteellinen translaatioliike
(Petri Rönnholm / Henrik Haggrén, ) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot.
 Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot.") Maa-57.301 Fotogrammetrian yleiskurssi (Petri Rönnholm / Henrik Haggrén, 12.9.2005) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot. Mitä pitäisi oppia? Palauttaa
Maa-57.301 Fotogrammetrian yleiskurssi (Petri Rönnholm / Henrik Haggrén, 12.9.2005) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot. Mitä pitäisi oppia? Palauttaa
Magneettiset testimittaukset miehittämättömällä lentolaitteella (UAV) Rovaniemellä
 Rovaniemellä") Magneettiset testimittaukset miehittämättömällä lentolaitteella (UAV) Rovaniemellä 2015-2016 Maija Kurimo & Heikki Salmirinne Geologian tutkimuskeskus SISÄLTÖ Mittaukset Tulokset Tulosten keskinäistä vertailua
Magneettiset testimittaukset miehittämättömällä lentolaitteella (UAV) Rovaniemellä 2015-2016 Maija Kurimo & Heikki Salmirinne Geologian tutkimuskeskus SISÄLTÖ Mittaukset Tulokset Tulosten keskinäistä vertailua
Virhearviointi. Fysiikassa on tärkeää tietää tulosten tarkkuus.
 Virhearviointi Fysiikassa on tärkeää tietää tulosten tarkkuus. Virhelajit A. Tilastolliset virheet= satunnaisvirheet, joita voi arvioida tilastollisin menetelmin B. Systemaattiset virheet = virheet, joita
Virhearviointi Fysiikassa on tärkeää tietää tulosten tarkkuus. Virhelajit A. Tilastolliset virheet= satunnaisvirheet, joita voi arvioida tilastollisin menetelmin B. Systemaattiset virheet = virheet, joita
Tampere University of Technology
 Tampere University of Technology EDE- Introduction to Finite Element Method. Exercise 3 Autumn 3.. Solve the deflection curve v(x) exactly for the beam shown y,v q v = q z, xxxx x E I z Integroidaan yhtälö
Tampere University of Technology EDE- Introduction to Finite Element Method. Exercise 3 Autumn 3.. Solve the deflection curve v(x) exactly for the beam shown y,v q v = q z, xxxx x E I z Integroidaan yhtälö
x = y x i = y i i = 1, 2; x + y = (x 1 + y 1, x 2 + y 2 ); x y = (x 1 y 1, x 2 + y 2 );
; x y = (x 1 y 1, x 2 + y 2 );") LINEAARIALGEBRA Harjoituksia/Exercises 2017 1. Olkoon n Z +. Osoita, että (R n, +, ) on lineaariavaruus, kun vektoreiden x = (x 1,..., x n ), y = (y 1,..., y n ) identtisyys, yhteenlasku ja reaaliluvulla
LINEAARIALGEBRA Harjoituksia/Exercises 2017 1. Olkoon n Z +. Osoita, että (R n, +, ) on lineaariavaruus, kun vektoreiden x = (x 1,..., x n ), y = (y 1,..., y n ) identtisyys, yhteenlasku ja reaaliluvulla
Numeeriset menetelmät TIEA381. Luento 12. Kirsi Valjus. Jyväskylän yliopisto. Luento 12 () Numeeriset menetelmät / 33
 Numeeriset menetelmät / 33") Numeeriset menetelmät TIEA381 Luento 12 Kirsi Valjus Jyväskylän yliopisto Luento 12 () Numeeriset menetelmät 25.4.2013 1 / 33 Luennon 2 sisältö Tavallisten differentiaaliyhtälöiden numeriikasta Rungen
Numeeriset menetelmät TIEA381 Luento 12 Kirsi Valjus Jyväskylän yliopisto Luento 12 () Numeeriset menetelmät 25.4.2013 1 / 33 Luennon 2 sisältö Tavallisten differentiaaliyhtälöiden numeriikasta Rungen
Yhden selittäjän lineaarinen regressiomalli (jatkoa) Ensi viikolla ei pidetä luentoa eikä harjoituksia. Heliövaara 1
 Ensi viikolla ei pidetä luentoa eikä harjoituksia. Heliövaara 1") Yhden selittäjän lineaarinen regressiomalli (jatkoa) Ensi viikolla ei pidetä luentoa eikä harjoituksia Heliövaara 1 Regressiokertoimien PNS-estimaattorit Määritellään havaintojen x j ja y j, j = 1, 2,...,n
Yhden selittäjän lineaarinen regressiomalli (jatkoa) Ensi viikolla ei pidetä luentoa eikä harjoituksia Heliövaara 1 Regressiokertoimien PNS-estimaattorit Määritellään havaintojen x j ja y j, j = 1, 2,...,n