Maa Kameran kalibrointi. TKK/Fotogrammetria/PP
|
|
|
- Laura Kokkonen
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
1 Kameran kalibrointi
2 Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta. Vasemmassa kuvassa linssin aiheuttamia vääristymiä ei ole korjattu ja oikeassa on.

3 Virheiden esittämiseen on olemassa useita erilaisia matemaattisia malleja. Nykyisin käytetyin on ns. fysikaalinen malli, jossa linssin aiheuttamat virheet koostuvat keskipisteestä piirretyn säteen suuntaisesta ja sitä vasttaan kohtisuorasta komponentista (aiheutuvat linssien muoto- ja asennusvirheistä). Lisäksi malliin kuuluu kuvakoordinaatiston vinoutta ja koordinaattiakselien mittakaavaeroa kuvaavat parametrit. Korjatut koordinaatit ovat esim. muotoa x oikea= x by k 1 x r 2 k 2 x r 4 k 3 x r 6 p 1 2xy p2 r 2 2x 2 y oikea=ay k 1 y r 2 k 2 y r 4 k 3 y r 6 p1 r 2 2y 2 p 2 2xy a,b k1,k2,k3 p1,p2 r2 kuvakoordinaatiston akselien vinouden ja mittakaavaeron kompensointi radiaalisen piirtovirheen kompensointi tangentiaalisen piirtovirheen kompensointi x2+y2

4 Alla vasemmalla on esitetty tyypillisiä radiaalisen piirtovirheen kuvaajia. Piirtovirhe riippuu siitä, mille etäisyydelle kamera on tarkennettu. Käytännössä on todettu, että tavallisia optiikoita käytettäessä kolme korjaustermiä (k1,k2 ja k3) on riittävä määrä. Yksinkertaisimmissa optiikoissa pärjätään jopa yhdellä termillä (k1) ja esim. kalansilmälinssiä käytettäessä saatetaan joutua turvautumaan jopa viiteen termiin. Kuva. J. G. Fryer Radiaalinen piirtovirhe aiheuttaa joko tynnyri - tai tyynyefektin.
 ja esim.")
. Kuva. J. G.")
5 Muuttamalla kameravakiota voidaan piirtovirheen kuvaaja saattaa halutunlaiseksi (balanced distortion). Virhe voidaan esim. saattaa nollaksi tietyllä etäisyydellä pääpisteestä (kts. kuva oikealla). Kuva. J. G. Fryer

6 Tangentiaalisen piirtovirheen vaikutus on yleensä huomattavasti pienempi kuin radiaalisen. Se on maksimissaan suunnassa ja nolla suunnassa + /2. Kuva. J. G. Fryer

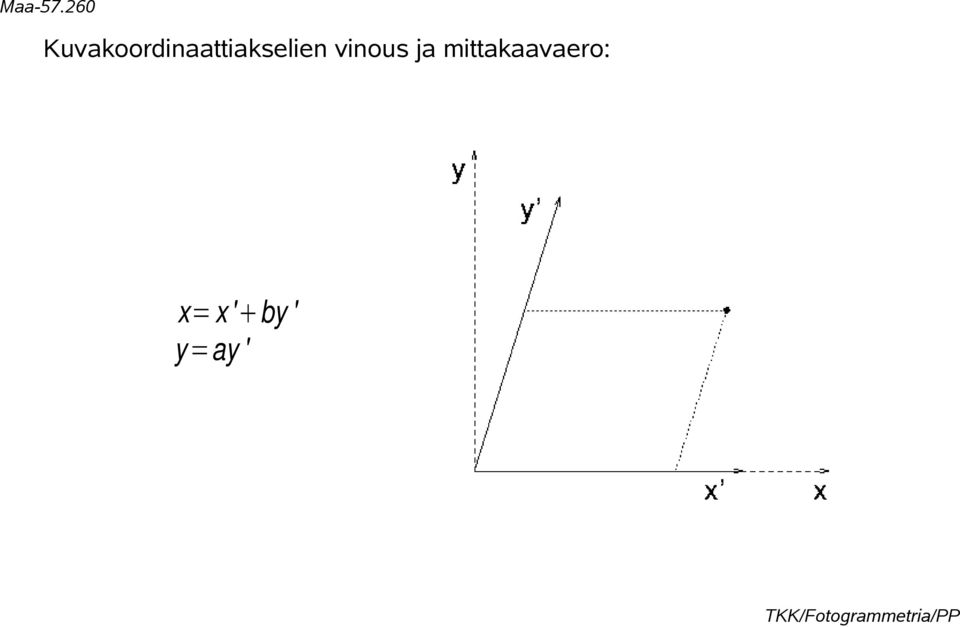
7 Kuvakoordinaattiakselien vinous ja mittakaavaero: x= x' by ' y=ay '
8 Muita korjausmalleja:: Polynomimalli: x oikea= x c 3 xy c 5 y² c 7 x² y c 9 xy² c 11 c 13 x³ y oikea= y c 1 y c 2 x c 4 x² c 6 xy c 8 x² y c 10 xy² c 12 x² y² c 14 y³ Spherical harmonics -malli: x r y y oikea = y a1 y a 2 x q r q=a 3 r cos a4 r sin a6 r² cos 2 a 7 r² sin 2 a8 r³ cos a9 r³ sin a10 r³ cos 3 a11 r³ sin 3 y r = x² y² =arctan x x oikea= x a1 x a 2 y q

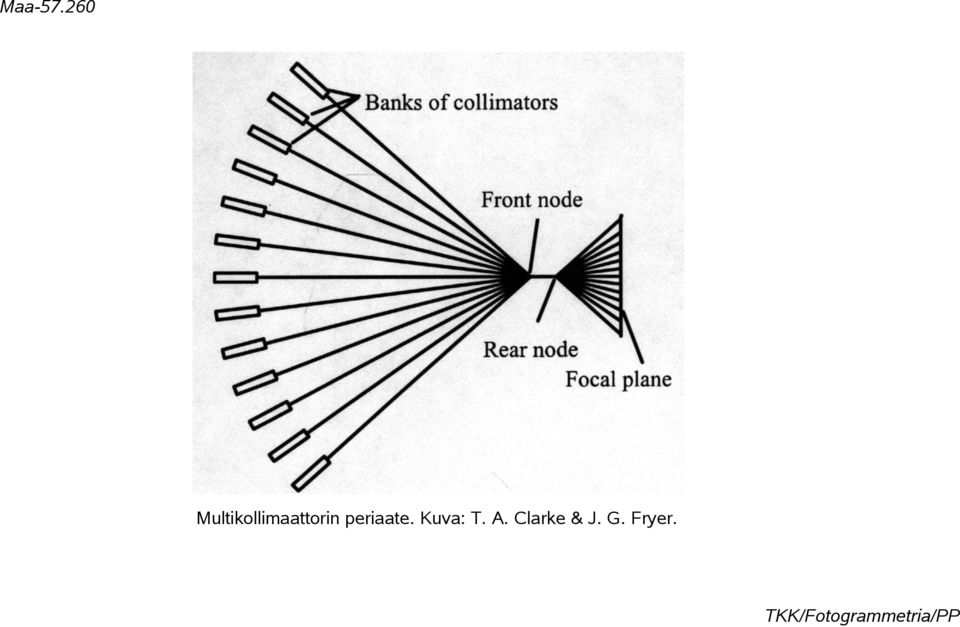
9 Kalibrointimenetelmiä: A) Laboratoriokalibrointi goniometrillä tai multikollimaattorilla -- piirtovirheiden mittaus -- pääpiste ja kameravakio lasketaan havaintojen perusteella -- lähinnä ilmakuvakameroiden kalibrointiin TKK:n goniometri. Kuva: H. Haggrén. Goniometrin periaate. Kuva: H. Haggrén.

10 Multikollimaattorin periaate. Kuva: T. A. Clarke & J. G. Fryer.
11 B) Testikenttäkalibrointi - kalibroinnissa käytetään hyväksi koordinaateiltaan tunnettuja 3D-pisteitä -- pisteistö voidaan mitata esim. teodoliiteilla tai fotogrammetrisesti - testikentästä otetaan useita kuvia eri suunnista erilaisin kamerakierroin - lopullinen laskenta perustuu yleensä kollineaarisuusyhtälön käyttöön m11 X X 0 m 21 Y Y 0 m 31 Z Z 0 x p x = c d x m 13 X X 0 m 23 Y Y 0 m 33 Z Z 0 m 21 X X 0 m 22 Y Y 0 m 32 Z Z 0 y p y = c d y m 13 X X 0 m 23 Y Y 0 m 33 Z Z 0 - epälineaaristen lausekkeiden vuoksi ratkaisu pitää hakea iteroimalla -- edellyttää likiarvoja ratkaistaville parametreille

12 - projektiokeskuksen paikat (X0,Y0,Z0) ja kameran kierrot ratkaistaan likimääräisesti esim. DLT:n avulla, pääpisteen likiarvoksi voidaan antaa esim. kuvan keskipiste, c:lle voi antaa likiarvoksi polttovälin nimellisarvon, k1, k2, k3, p1, p2, ja b voidaan merkata nollaksi ja a ykköseksi TKK:n testikenttä. Siirreltävä testikenttä. Kuva: K. Nummiaro.

13 C) Itsekalibrointi - kalibrointia varten ei ole mitattu/tehty mitään erityisiä pisteitä, vaan laskenta perustuu kohdepisteiden käyttöön - edellyttää vahvaa kuvausgeometriaa ja useita kuvia - laskentaa varten kohdepisteille on tavalla tai toisella hankittava likimääräiset koordinaatit, joiden perusteella saadaan likimääräiset kamera-asemat ja kierrot laskettua iteratiivista laskentaa varten - kameraparametrit ratkaistaan samanaikaisesti kohdepisteiden kanssa - hyvin paljon käytetty menetelmä lähifotogrammetrisissa mittauksissa - etuna se, että kamera tulee kalibroitua mittausolosuhteissa

14 D) Kalibrointi kameraa pyörittämällä - jos kuvattava kohde on lähellä tarvitaan jalusta, jolla kameraa voidaan pyörittää siten, että projektiokeskus pysyy paikallaan - kohteen ollessa kaukana ei projektiokeskuksen pieni liike ole merkityksellinen tulosten kannalta Kuva: A. Kukko. - kameran asemointia varten luodaan erityisten tähysten avulla linjoja, jotka kohtaavat jalustan pyörähdysakselien leikkauspisteessä (esim. teodoliitilla) - kameraa siirretään jalustalla kunnes linjat ovat kohdallaan jalustan kierroista huolimatta - tällä tavoin projektiokeskus saadaan muutaman millin tarkkuudella oikeaan paikkaan
 - kameraa siirretään jalustalla kunnes linjat ovat kohdallaan jalustan kierroista huolimatta - tällä tavoin projektiokeskus saadaan")
15 Etu- ja takatähys. Kuva: A. Kukko. Kameran asemointi jalustalle. Kuva: A. Kukko. Oikein asemoitu kamera pitää tähykset kohdakkain vaikka jalustaa kierretään (oikeanpuolimmaisin kuva). Kuva: A. Kukko.

16 - kuvien väliset kierrot ja kalibrointiparametrit ratkaistaan kuvilta mitattujen vastinpisteiden avulla - parhaaseen luotettavuuteen päästään kun kameraa kierretään sekä vaakaettä pystysuunnassa Tyypillinen kuvasarja kalibrointia varten.

17 - vastinpisteiden ideaaliset koordinaatit ovat x a =x a0 p x d xa y a = y a0 p y d ya x b =x b0 p x d xb y b = y b0 p y d yb missä xa0, ya0, xb0 ja yb0 ovat mitatut kuvakoordinaatit, px ja py pääpisteen koordinaatit ja dxa,dya,dxb ja dyb piirtovirheiden parametrit - vastinpisteiden määrittämille vektoreille pätee a= x a y a c T b= x b y b c T a b =R a b

18 - jokainen vastinpistepari tuottaa kolme yhtälöä x a x b r 11 y b r 12 c r 13 = a b y a x b r 21 y b r 22 c r 23 = a b c x b r 31 y b r 32 c r 33 = a b - havaitsemalla riittävä määrä vastinpisteitä voidaan muodostaa yhtälöryhmä josta kierrot ja kameran parametrit on ratkaistavissa - tehtävä on epälineaarinen, joten tuntemattomille on oltava likiarvot -- kierroille saadaan helposti likiarvot muutaman vastinpisteen perusteella -- k1, k2, k3, p1, p2, ja b voidaan merkata taas nollaksi ja a ykköseksi -- pääpiste voidaan laittaa kuvan keskipisteeseen ja kameravakioksi esim. kuvan leveys

19 E) Kalibrointi tähtien avulla - tähtien sijainti toistensa suhteen tunnetaan riittävällä tarkkuudella kameran kalibrointia varten - ongelmana ilmakehän refraktio ja himmeiden tähtien näkyvyys kuvassa - käytetty esim. ohjusten lentoradan määritysten yhteydessä

20 F) Plumb line -kalibrointi - kameralla kuvataan suoraa viivastoa eri asennoista -- viivasto voi koostua esim. luotilangoista (kts. kuva) - viivojen kaareutuma katsotaan johtuvan optiikan piirtovirheistä - ko. menetelmällä ei pystytä määrittämään kameravakiota ja pääpisteen paikalle saadaan luotettavat koordinaatit vain jos optiikan aiheuttamat vääristymät ovat riittävän suuria - soveltuu esim. piirtovirheiden määritykseen kameran eri tarkennuksille ja likiarvojen hankintaan esim. itsekalibrointia varten Kuva: J. G. Fryer.

21 - kuvilta mitataan suoraan kuuluvien pisteiden koordinaatteja ja ratkaistaan suoran parametrit yhtälöstä x sin y cos =, missä x =x mitattu d x y = y mitattu d y. - ratkaistavaksi saadaan yhtälöryhmä, jossa tuntemattomina ovat kaikkien kuvilla näkyvien suorien parametrit sekä kuville yhteiset kalibrointiparametrit Kuva: J. G. Fryer.

22 Esimerkki: Tapa 1 (yhtenäinen viiva): - testikenttäkalibrointi - 5 kuvaa, 372 mitattua pistettä Tapa 2(katkoviiva): - kalibrointi kameraa pyörittämällä - 3 kuvaa, 102 mitattua pistettä, 50%:n peitto Kalibroitu kamera: Olympus Camedia C-1400L Jyrkemmät käyrät kuvaavat radiaalista piirotvirhettä ja loivemmat tangentiaalista.
23 Tulokset: Tapa 1: px py c a b k1 k2 k3 p1 p e e e e e e e-07 (std. err.) e e e e e e e-07 Tapa 2: px py c a b k1 k2 k3 p1 p e e e e e e e-07 (std. err.) e e e e e e e-07
24 Kirjallisuutta: J. G. Fryer: Camera Calibration in Non-Topographic Photogrammetry, Non-Topographic Photogrammetry, H. M. Karara (ed.), ASPRS, J. G. Fryer: Camera Calibration, Close Range Photogrammetry and Machine Vision, K. B. Atkinson (ed.), Whittles Publishing, Luhmann T., Robson S., Kyle S., Harley I., Close Range PhotogrammetryPrinciples, Methods and Applications, s
Teoreettisia perusteita II
 Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Luento 5: Stereoskooppinen mittaaminen
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry)
") Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
Luento 3: Kuvahavainnot
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Luento 6: 3-D koordinaatit
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Luento 4 Georeferointi
 Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
SINI- JA KOSINILAUSE. Laskentamenetelmät Geodeettinen laskenta - 1-1988-1999 M-Mies Oy
 SINI- JA KOSINILAUSE SINILAUSE: Kolmiossa kulman sinien suhde on sama kuin kulman vastaisten sivujen suhde. Toisin sanoen samassa kolmiossa SIN Kulma / Sivu = Vakio (Jos > 100 gon: Kulma = 200 kulma).
SINI- JA KOSINILAUSE SINILAUSE: Kolmiossa kulman sinien suhde on sama kuin kulman vastaisten sivujen suhde. Toisin sanoen samassa kolmiossa SIN Kulma / Sivu = Vakio (Jos > 100 gon: Kulma = 200 kulma).
Fotogrammetrian termistöä
 Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Luento 4: Kolmiointihavainnot
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Luento 4 Georeferointi Maa Fotogrammetrian perusteet 1
 Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 2 Stereokuvan laskeminen. 2008 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Vanhoja koetehtäviä. Analyyttinen geometria 2016
 Vanhoja koetehtäviä Analyyttinen geometria 016 1. Määritä luvun a arvo, kun piste (,3) on käyrällä a(3x + a) = (y - 1). Suora L kulkee pisteen (5,1) kautta ja on kohtisuorassa suoraa 6x + 7y - 19 = 0 vastaan.
Vanhoja koetehtäviä Analyyttinen geometria 016 1. Määritä luvun a arvo, kun piste (,3) on käyrällä a(3x + a) = (y - 1). Suora L kulkee pisteen (5,1) kautta ja on kohtisuorassa suoraa 6x + 7y - 19 = 0 vastaan.
Mittausten suunnittelu I
 Mittausten suunnittelu I Eteenpäinleikkaukseen perustuvan mittauksen tarkkuus riippuu kahdesta asiasta (C.S. Fraser, 1996): 1) kuvaus-/tähtäyssäteen määritystarkkuudesta 2) kuvausgeometriasta Saavutettavaa
Mittausten suunnittelu I Eteenpäinleikkaukseen perustuvan mittauksen tarkkuus riippuu kahdesta asiasta (C.S. Fraser, 1996): 1) kuvaus-/tähtäyssäteen määritystarkkuudesta 2) kuvausgeometriasta Saavutettavaa
y=-3x+2 y=2x-3 y=3x+2 x = = 6
 MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
Tekijä Pitkä matematiikka
 K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
Suorat ja tasot, L6. Suuntajana. Suora xy-tasossa. Suora xyzkoordinaatistossa. Taso xyzkoordinaatistossa. Tason koordinaattimuotoinen yhtälö.
 Suorat ja tasot, L6 Suora xyz-koordinaatistossa Taso xyz-koordinaatistossa stä stä 1 Näillä kalvoilla käsittelemme kolmen laisia olioita. Suora xyz-avaruudessa. Taso xyz-avaruudessa. Emme nyt ryhdy pohtimaan,
Suorat ja tasot, L6 Suora xyz-koordinaatistossa Taso xyz-koordinaatistossa stä stä 1 Näillä kalvoilla käsittelemme kolmen laisia olioita. Suora xyz-avaruudessa. Taso xyz-avaruudessa. Emme nyt ryhdy pohtimaan,
Luento 7: Kuvan ulkoinen orientointi
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Tekijä Pitkä matematiikka Pisteen (x, y) etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.
 etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.") Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
S11-04 Kompaktikamerat stereokamerajärjestelmässä. Projektisuunnitelma
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Projektisuunnitelma Ari-Matti Reinsalo Anssi Niemi 28.1.2011 Projektityön tavoite Projektityössä
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Projektisuunnitelma Ari-Matti Reinsalo Anssi Niemi 28.1.2011 Projektityön tavoite Projektityössä
Tekijä Pitkä matematiikka Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4).
, ( 2,1), (1, 0), (4, 1) ja ( 11, 4).") Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
5.3 Suoran ja toisen asteen käyrän yhteiset pisteet
 .3 Suoran ja toisen asteen käyrän yhteiset pisteet Tämän asian taustana on ratkaista sellainen yhtälöpari, missä yhtälöistä toinen on ensiasteinen ja toinen toista astetta. Tällainen pari ratkeaa aina
.3 Suoran ja toisen asteen käyrän yhteiset pisteet Tämän asian taustana on ratkaista sellainen yhtälöpari, missä yhtälöistä toinen on ensiasteinen ja toinen toista astetta. Tällainen pari ratkeaa aina
Luento 4: Kiertomatriisi
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Luento 8: Kolmiointi AIHEITA. Kolmiointi. Maa-57.301 Fotogrammetrian yleiskurssi. Luento-ohjelma 1 2 3 4 5 6 7 8 9 10
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
1. Olkoot vektorit a, b ja c seuraavasti määritelty: a) Määritä vektori. sekä laske sen pituus.
 Määritä vektori. sekä laske sen pituus.") Matematiikan kurssikoe, Maa4 Vektorit RATKAISUT Sievin lukio Keskiviikko 12.4.2017 VASTAA YHTEENSÄ VIITEEN TEHTÄVÄÄN! MAOL JA LASKIN/LAS- KINOHJELMAT OVAT SALLITTUJA! 1. Olkoot vektorit a, b ja c seuraavasti
Matematiikan kurssikoe, Maa4 Vektorit RATKAISUT Sievin lukio Keskiviikko 12.4.2017 VASTAA YHTEENSÄ VIITEEN TEHTÄVÄÄN! MAOL JA LASKIN/LAS- KINOHJELMAT OVAT SALLITTUJA! 1. Olkoot vektorit a, b ja c seuraavasti
Solmu 3/2001 Solmu 3/2001. Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä:
 Frégier n lause Simo K. Kivelä Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä: Suorakulmaisen kolmion kaikki kärjet sijaitsevat paraabelilla y = x 2 ; suoran kulman
Frégier n lause Simo K. Kivelä Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä: Suorakulmaisen kolmion kaikki kärjet sijaitsevat paraabelilla y = x 2 ; suoran kulman
Luento 7 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Yhtälön oikealla puolella on säteen neliö, joten r. = 5 eli r = ± 5. Koska säde on positiivinen, niin r = 5.
 Tekijä Pitkä matematiikka 5 7..017 31 Kirjoitetaan yhtälö keskipistemuotoon ( x x ) + ( y y ) = r. 0 0 a) ( x 4) + ( y 1) = 49 Yhtälön vasemmalta puolelta nähdään, että x 0 = 4 ja y 0 = 1, joten ympyrän
Tekijä Pitkä matematiikka 5 7..017 31 Kirjoitetaan yhtälö keskipistemuotoon ( x x ) + ( y y ) = r. 0 0 a) ( x 4) + ( y 1) = 49 Yhtälön vasemmalta puolelta nähdään, että x 0 = 4 ja y 0 = 1, joten ympyrän
7.4 PERUSPISTEIDEN SIJAINTI
 67 7.4 PERUSPISTEIDEN SIJAINTI Optisen systeemin peruspisteet saadaan systeemimatriisista. Käytetään seuraavan kuvan merkintöjä: Kuvassa sisäänmenotaso on ensimmäisen linssin ensimmäisessä pinnassa eli
67 7.4 PERUSPISTEIDEN SIJAINTI Optisen systeemin peruspisteet saadaan systeemimatriisista. Käytetään seuraavan kuvan merkintöjä: Kuvassa sisäänmenotaso on ensimmäisen linssin ensimmäisessä pinnassa eli
Suorien ja tasojen geometriaa Suorien ja tasojen yhtälöt
 6. Suorien tasojen geometriaa 6.1. Suorien tasojen yhtälöt 55. Osoita, että yhtälöt x = 3 + τ y = 1 3τ esittävät samaa tason suoraa. Yhteinen piste 1,5) suunta i 3j. x = 1 6τ y = 5 + 9τ 56. Määritä suoran
6. Suorien tasojen geometriaa 6.1. Suorien tasojen yhtälöt 55. Osoita, että yhtälöt x = 3 + τ y = 1 3τ esittävät samaa tason suoraa. Yhteinen piste 1,5) suunta i 3j. x = 1 6τ y = 5 + 9τ 56. Määritä suoran
Teoreettisia perusteita I
 Teoreettisia perusteita I - fotogrammetrinen mittaaminen perustuu pitkälti kollineaarisuusehtoon, jossa pisteestä heijastuva valonsäde kulkee suoraan projektiokeskuksen kautta kuvatasolle - toisaalta kameran
Teoreettisia perusteita I - fotogrammetrinen mittaaminen perustuu pitkälti kollineaarisuusehtoon, jossa pisteestä heijastuva valonsäde kulkee suoraan projektiokeskuksen kautta kuvatasolle - toisaalta kameran
Luento 7: Fotogrammetrinen mittausprosessi
 7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
MAA4 - HARJOITUKSIA. 1. Esitä lauseke 3 x + 2x 4 ilman itseisarvomerkkejä. 3. Ratkaise yhtälö 2 x 7 3 + 4x = 2 (yksi ratkaisu, eräs neg. kokon.
 MAA4 - HARJOITUKSIA 1. Esitä lauseke 3 + 4 ilman itseisarvomerkkejä.. Ratkaise yhtälö a ) 5 9 = 6 b) 6 9 = 0 c) 7 9 + 6 = 0 3. Ratkaise yhtälö 7 3 + 4 = (yksi ratkaisu, eräs neg. kokon. luku) 4. Ratkaise
MAA4 - HARJOITUKSIA 1. Esitä lauseke 3 + 4 ilman itseisarvomerkkejä.. Ratkaise yhtälö a ) 5 9 = 6 b) 6 9 = 0 c) 7 9 + 6 = 0 3. Ratkaise yhtälö 7 3 + 4 = (yksi ratkaisu, eräs neg. kokon. luku) 4. Ratkaise
Luento Fotogrammetrian perusteet. Henrik Haggrén
 Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
2 Pistejoukko koordinaatistossa
 Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Kaikkiin tehtäviin ratkaisujen välivaiheet näkyviin! Lue tehtävänannot huolellisesti. Tee pisteytysruudukko B-osion konseptin yläreunaan!
 MAA4 koe 1.4.2016 Kaikkiin tehtäviin ratkaisujen välivaiheet näkyviin! Lue tehtävänannot huolellisesti. Tee pisteytysruudukko B-osion konseptin yläreunaan! Jussi Tyni A-osio: Ilman laskinta. Laske kaikki
MAA4 koe 1.4.2016 Kaikkiin tehtäviin ratkaisujen välivaiheet näkyviin! Lue tehtävänannot huolellisesti. Tee pisteytysruudukko B-osion konseptin yläreunaan! Jussi Tyni A-osio: Ilman laskinta. Laske kaikki
A-osio. Tehdään ilman laskinta ja taulukkokirjaa! Valitse tehtävistä A1-A3 kaksi ja vastaa niihin. Maksimissaan tunti aikaa suorittaa A-osiota.
 MAA5.2 Loppukoe 24.9.2013 Jussi Tyni Valitse 6 tehtävää Muista merkitä vastauspaperiin oma nimesi ja tee etusivulle pisteytysruudukko Kaikkiin tehtävien ratkaisuihin välivaiheet näkyviin! A1. A-osio. Tehdään
MAA5.2 Loppukoe 24.9.2013 Jussi Tyni Valitse 6 tehtävää Muista merkitä vastauspaperiin oma nimesi ja tee etusivulle pisteytysruudukko Kaikkiin tehtävien ratkaisuihin välivaiheet näkyviin! A1. A-osio. Tehdään
Muutoksen arviointi differentiaalin avulla
 Muutoksen arviointi differentiaalin avulla y y = f (x) y = f (x + x) f (x) dy y dy = f (x) x x x x x + x Luento 7 1 of 15 Matematiikan ja tilastotieteen laitos Turun yliopisto Muutoksen arviointi differentiaalin
Muutoksen arviointi differentiaalin avulla y y = f (x) y = f (x + x) f (x) dy y dy = f (x) x x x x x + x Luento 7 1 of 15 Matematiikan ja tilastotieteen laitos Turun yliopisto Muutoksen arviointi differentiaalin
Luento 4: Kolmiointihavainnot
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Ensimmäisen asteen polynomifunktio
 Ensimmäisen asteen polnomifunktio Yhtälön f = a+ b, a 0 määrittelemää funktiota sanotaan ensimmäisen asteen polnomifunktioksi. Esimerkki. Ensimmäisen asteen polnomifuktioita ovat esimerkiksi f = 3 7, v()
Ensimmäisen asteen polnomifunktio Yhtälön f = a+ b, a 0 määrittelemää funktiota sanotaan ensimmäisen asteen polnomifunktioksi. Esimerkki. Ensimmäisen asteen polnomifuktioita ovat esimerkiksi f = 3 7, v()
Yleistä vektoreista GeoGebralla
 Vektoreita GeoGebralla Vektoreilla voi laskea joko komentopohjaisesti esim. CAS-ikkunassa tai piirtämällä piirtoikkunassa. Ensimmäisen tavan etuna on, että laskujen tueksi muodostuu kuva. Tästä on varmasti
Vektoreita GeoGebralla Vektoreilla voi laskea joko komentopohjaisesti esim. CAS-ikkunassa tai piirtämällä piirtoikkunassa. Ensimmäisen tavan etuna on, että laskujen tueksi muodostuu kuva. Tästä on varmasti
x 5 15 x 25 10x 40 11x x y 36 y sijoitus jompaankumpaan yhtälöön : b)
") MAA4 ratkaisut. 5 a) Itseisarvon vastauksen pitää olla aina positiivinen, joten määritelty kun 5 0 5 5 tai ( ) 5 5 5 5 0 5 5 5 5 0 5 5 0 0 9 5 9 40 5 5 5 5 0 40 5 Jälkimmäinen vastaus ei toimi määrittelyjoukon
MAA4 ratkaisut. 5 a) Itseisarvon vastauksen pitää olla aina positiivinen, joten määritelty kun 5 0 5 5 tai ( ) 5 5 5 5 0 5 5 5 5 0 5 5 0 0 9 5 9 40 5 5 5 5 0 40 5 Jälkimmäinen vastaus ei toimi määrittelyjoukon
Taso 1/5 Sisältö ESITIEDOT: vektori, koordinaatistot, piste, suora
 Taso 1/5 Sisältö Taso geometrisena peruskäsitteenä Kolmiulotteisen alkeisgeometrian peruskäsitteisiin kuuluu taso pisteen ja suoran lisäksi. Intuitiivisesti sitä voidaan ajatella joka suunnassa äärettömyyteen
Taso 1/5 Sisältö Taso geometrisena peruskäsitteenä Kolmiulotteisen alkeisgeometrian peruskäsitteisiin kuuluu taso pisteen ja suoran lisäksi. Intuitiivisesti sitä voidaan ajatella joka suunnassa äärettömyyteen
Tekijä Pitkä matematiikka
 Tekijä Pitkä matematiikka 5..017 110 Valitaan suoralta kaksi pistettä ja piirretään apukolmio, josta koordinaattien muutokset voidaan lukea. Vaakasuoran suoran kulmakerroin on nolla. y Suoran a kulmakerroin
Tekijä Pitkä matematiikka 5..017 110 Valitaan suoralta kaksi pistettä ja piirretään apukolmio, josta koordinaattien muutokset voidaan lukea. Vaakasuoran suoran kulmakerroin on nolla. y Suoran a kulmakerroin
c) Määritä paraabelin yhtälö, kun tiedetään, että sen huippu on y-akselilla korkeudella 6 ja sen nollakohdat ovat x-akselin kohdissa x=-2 ja x=2.
 Määritä paraabelin yhtälö, kun tiedetään, että sen huippu on y-akselilla korkeudella 6 ja sen nollakohdat ovat x-akselin kohdissa x=-2 ja x=2.") MAA4 Koe 5.5.01 Jussi Tyni Kaikkiin tehtäviin ratkaisujen välivaiheet näkyviin! Ota kokeesta poistuessasi tämä paperi mukaasi! Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Valitse
MAA4 Koe 5.5.01 Jussi Tyni Kaikkiin tehtäviin ratkaisujen välivaiheet näkyviin! Ota kokeesta poistuessasi tämä paperi mukaasi! Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Valitse
Luento 6: Stereo- ja jonomallin muodostaminen
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Luento 11: Stereomallin ulkoinen orientointi
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Ympyrän yhtälö
 Ympyrän yhtälö ANALYYTTINEN GEOMETRIA MAA4 On melko selvää, että origokeskisen ja r-säteisen ympyrän yhtälö voidaan esittää muodossa x 2 + y 2 = r 2. Vastaavalla tavalla muodostetaan ympyrän yhtälö, jonka
Ympyrän yhtälö ANALYYTTINEN GEOMETRIA MAA4 On melko selvää, että origokeskisen ja r-säteisen ympyrän yhtälö voidaan esittää muodossa x 2 + y 2 = r 2. Vastaavalla tavalla muodostetaan ympyrän yhtälö, jonka
yleisessä muodossa x y ax by c 0. 6p
 MAA..0 Muista kirjoittaa jokaiseen paperiin nimesi! Tee vastauspaperin yläreunaan pisteytysruudukko! Valitse kuusi tehtävää! Perustele vastauksesi välivaiheilla! Jussi Tyni Ratkaise: a) x x b) xy x 6y
MAA..0 Muista kirjoittaa jokaiseen paperiin nimesi! Tee vastauspaperin yläreunaan pisteytysruudukko! Valitse kuusi tehtävää! Perustele vastauksesi välivaiheilla! Jussi Tyni Ratkaise: a) x x b) xy x 6y
Koontitehtäviä luvuista 1 9
 11 Koontitehtäviä luvuista 1 9 1. a) 3 + ( 8) + = 3 8 + = 3 b) x x 10 = 0 a =, b = 1, c = 10 ( 1) ( 1) 4 ( 10) 1 81 1 9 x 4 4 1 9 1 9 x,5 tai x 4 4 c) (5a) (a + 1) = 5a a 1 = 4a 1. a) Pythagoraan lause:
11 Koontitehtäviä luvuista 1 9 1. a) 3 + ( 8) + = 3 8 + = 3 b) x x 10 = 0 a =, b = 1, c = 10 ( 1) ( 1) 4 ( 10) 1 81 1 9 x 4 4 1 9 1 9 x,5 tai x 4 4 c) (5a) (a + 1) = 5a a 1 = 4a 1. a) Pythagoraan lause:
13. Taylorin polynomi; funktioiden approksimoinnista. Muodosta viidennen asteen Taylorin polynomi kehityskeskuksena origo funktiolle
 13. Taylorin polynomi; funktioiden approksimoinnista 13.1. Taylorin polynomi 552. Muodosta funktion f (x) = x 4 + 3x 3 + x 2 + 2x + 8 kaikki Taylorin polynomit T k (x, 2), k = 0,1,2,... (jolloin siis potenssien
13. Taylorin polynomi; funktioiden approksimoinnista 13.1. Taylorin polynomi 552. Muodosta funktion f (x) = x 4 + 3x 3 + x 2 + 2x + 8 kaikki Taylorin polynomit T k (x, 2), k = 0,1,2,... (jolloin siis potenssien
Digitaalikameran asemointi pallopanoraamajalustaan
 Maa-57.290 Fotogrammetrian erikoistyö Digitaalikameran asemointi pallopanoraamajalustaan Espoo, elokuussa 2001 Antero Kukko Sisällysluettelo 1. Johdanto 3 2. Perspektiivinen kameramalli ja kuvasäteiden
Maa-57.290 Fotogrammetrian erikoistyö Digitaalikameran asemointi pallopanoraamajalustaan Espoo, elokuussa 2001 Antero Kukko Sisällysluettelo 1. Johdanto 3 2. Perspektiivinen kameramalli ja kuvasäteiden
Pyramidi 4 Analyyttinen geometria tehtävien ratkaisut sivu 180 Päivitetty Pyramidi 4 Luku Ensimmäinen julkaistu versio
 Pyramidi 4 Analyyttinen geometria tehtävien ratkaisut sivu 8 Päivitetty 7.5.6 Pyramidi 4 Luku 5..6 Ensimmäinen julkaistu versio 7.5.6 Korjattu tehtävän 56 vastaus Pyramidi 4 Analyyttinen geometria tehtävien
Pyramidi 4 Analyyttinen geometria tehtävien ratkaisut sivu 8 Päivitetty 7.5.6 Pyramidi 4 Luku 5..6 Ensimmäinen julkaistu versio 7.5.6 Korjattu tehtävän 56 vastaus Pyramidi 4 Analyyttinen geometria tehtävien
 MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
Luento 6 Mittausten suunnittelu II. erikoissovellukset
 Luento 6 Mittausten suunnittelu II 1 Aiheita Mittausongelman määrittely Tarkkuusluvut Suhteellinen tarkkuusluku Suhteellinen tarkkuus Tarkkuuden arvioiminen Kuvahavainnon keskivirhe Verkon rakennevakio
Luento 6 Mittausten suunnittelu II 1 Aiheita Mittausongelman määrittely Tarkkuusluvut Suhteellinen tarkkuusluku Suhteellinen tarkkuus Tarkkuuden arvioiminen Kuvahavainnon keskivirhe Verkon rakennevakio
Harjoituksia MAA4 - HARJOITUKSIA. 6. Merkitse lukusuoralle ne luvut, jotka toteuttavat epäyhtälön x 2 < ½.
 MAA4 - HARJOITUKSIA 1 Esitä lauseke 3 x + x 4 ilman itseisarvomerkkejä Ratkaise yhtälö a ) 5x 9 = 6 b) 6x 9 = 0 c) 7x 9 + 6 = 0 3 Ratkaise yhtälö x 7 3 + 4x = 4 Ratkaise yhtälö 5x + = 3x 4 5 Ratkaise yhtälö
MAA4 - HARJOITUKSIA 1 Esitä lauseke 3 x + x 4 ilman itseisarvomerkkejä Ratkaise yhtälö a ) 5x 9 = 6 b) 6x 9 = 0 c) 7x 9 + 6 = 0 3 Ratkaise yhtälö x 7 3 + 4x = 4 Ratkaise yhtälö 5x + = 3x 4 5 Ratkaise yhtälö
Lauseen erikoistapaus on ollut kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa seuraavassa muodossa:
 Simo K. Kivelä, 13.7.004 Frégier'n lause Toisen asteen käyrillä ellipseillä, paraabeleilla, hyperbeleillä ja niiden erikoistapauksilla on melkoinen määrä yksinkertaisia säännöllisyysominaisuuksia. Eräs
Simo K. Kivelä, 13.7.004 Frégier'n lause Toisen asteen käyrillä ellipseillä, paraabeleilla, hyperbeleillä ja niiden erikoistapauksilla on melkoinen määrä yksinkertaisia säännöllisyysominaisuuksia. Eräs
Luento 3: 3D katselu. Sisältö
 Tietokonegrafiikan perusteet T-.43 3 op Luento 3: 3D katselu Lauri Savioja Janne Kontkanen /27 3D katselu / Sisältö Kertaus: koordinaattimuunnokset ja homogeeniset koordinaatit Näkymänmuodostus Kameran
Tietokonegrafiikan perusteet T-.43 3 op Luento 3: 3D katselu Lauri Savioja Janne Kontkanen /27 3D katselu / Sisältö Kertaus: koordinaattimuunnokset ja homogeeniset koordinaatit Näkymänmuodostus Kameran
Tuulen nopeuden mittaaminen
 KON C3004 Kone ja rakennustekniikan laboratoriotyöt Koesuunnitelma / ryhmä K Tuulen nopeuden mittaaminen Matias Kidron 429542 Toni Kokkonen 429678 Sakke Juvonen 429270 Kansikuva: http://www.stevennoble.com/main.php?g2_view=core.downloaditem&g2_itemid=12317&g2_serialnumber=2
KON C3004 Kone ja rakennustekniikan laboratoriotyöt Koesuunnitelma / ryhmä K Tuulen nopeuden mittaaminen Matias Kidron 429542 Toni Kokkonen 429678 Sakke Juvonen 429270 Kansikuva: http://www.stevennoble.com/main.php?g2_view=core.downloaditem&g2_itemid=12317&g2_serialnumber=2
Erikoistekniikoita. Moiré - shadow-moiré - projection-moiré. Rasterifotogrammetria - yhden juovan menetelmä - monen juovan menetelmä
 Erikoistekniikoita Moiré - shadow-moiré - projection-moiré Rasterifotogrammetria - yhden juovan menetelmä - monen juovan menetelmä Tomografia - periaate Hologrammetria - periaate Motografia Moiré-tekniikka
Erikoistekniikoita Moiré - shadow-moiré - projection-moiré Rasterifotogrammetria - yhden juovan menetelmä - monen juovan menetelmä Tomografia - periaate Hologrammetria - periaate Motografia Moiré-tekniikka
Suorista ja tasoista LaMa 1 syksyllä 2009
 Viidennen viikon luennot Suorista ja tasoista LaMa 1 syksyllä 2009 Perustuu kirjan Poole: Linear Algebra lukuihin I.3 - I.4 Esko Turunen esko.turunen@tut.fi Aluksi hiukan 2 ja 3 ulotteisen reaaliavaruuden
Viidennen viikon luennot Suorista ja tasoista LaMa 1 syksyllä 2009 Perustuu kirjan Poole: Linear Algebra lukuihin I.3 - I.4 Esko Turunen esko.turunen@tut.fi Aluksi hiukan 2 ja 3 ulotteisen reaaliavaruuden
Työ 2324B 4h. VALON KULKU AINEESSA
 TURUN AMMATTIKORKEAKOULU TYÖOHJE 1/5 Työ 2324B 4h. VALON KULKU AINEESSA TYÖN TAVOITE Työssä perehdytään optisiin ilmiöihin tutkimalla valon kulkua linssisysteemeissä ja prismassa. Tavoitteena on saada
TURUN AMMATTIKORKEAKOULU TYÖOHJE 1/5 Työ 2324B 4h. VALON KULKU AINEESSA TYÖN TAVOITE Työssä perehdytään optisiin ilmiöihin tutkimalla valon kulkua linssisysteemeissä ja prismassa. Tavoitteena on saada
Ratkaisuja, Tehtävät
 ja, Tehtävät 988-97 988 a) Osoita, että lausekkeiden x 2 + + x 4 + 2x 2 ja x 2 + - x 4 + 2x 2 arvot ovat toistensa käänteislukuja kaikilla x:n arvoilla. b) Auton jarrutusmatka on verrannollinen nopeuden
ja, Tehtävät 988-97 988 a) Osoita, että lausekkeiden x 2 + + x 4 + 2x 2 ja x 2 + - x 4 + 2x 2 arvot ovat toistensa käänteislukuja kaikilla x:n arvoilla. b) Auton jarrutusmatka on verrannollinen nopeuden
Juuri 4 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty Kertaus. b) B = (3, 0, 5) K2. 8 ( 1)
 B = (3, 0, 5) K2. 8 ( 1)") Kertaus K1. a) OA i k b) B = (, 0, 5) K. K. a) AB (6 ( )) i () ( ( 7)) k 8i 4k AB 8 ( 1) 4 64116 819 b) 1 1 AB( ( 1)) i 1 i 4 AB ( ) ( 4) 416 0 45 5 K4. a) AB AO OB OA OB ( i ) i i i 5i b) Pisteen A paikkavektori
Kertaus K1. a) OA i k b) B = (, 0, 5) K. K. a) AB (6 ( )) i () ( ( 7)) k 8i 4k AB 8 ( 1) 4 64116 819 b) 1 1 AB( ( 1)) i 1 i 4 AB ( ) ( 4) 416 0 45 5 K4. a) AB AO OB OA OB ( i ) i i i 5i b) Pisteen A paikkavektori
SISÄLTÖ Venymän käsite Liukuman käsite Venymä ja liukuma lujuusopin sovelluksissa
 SISÄLTÖ Venymän käsite Liukuman käsite Venymä ja liukuma lujuusopin sovelluksissa 1 SISÄLTÖ 1. Siirtymä 2 1 2.1 MUODONMUUTOS Muodonmuutos (deformaatio) Tapahtuu, kun kappaleeseen vaikuttaa voima/voimia
SISÄLTÖ Venymän käsite Liukuman käsite Venymä ja liukuma lujuusopin sovelluksissa 1 SISÄLTÖ 1. Siirtymä 2 1 2.1 MUODONMUUTOS Muodonmuutos (deformaatio) Tapahtuu, kun kappaleeseen vaikuttaa voima/voimia
Luento 9 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Anna jokaisen kohdan vastaus kolmen merkitsevän numeron tarkkuudella muodossa
 Preliminäärikoe Tehtävät Pitkä matematiikka / Kokeessa saa vastata enintään kymmeneen tehtävään Tähdellä (* merkittyjen tehtävien maksimipistemäärä on 9, muiden tehtävien maksimipistemäärä on 6 Jos tehtävässä
Preliminäärikoe Tehtävät Pitkä matematiikka / Kokeessa saa vastata enintään kymmeneen tehtävään Tähdellä (* merkittyjen tehtävien maksimipistemäärä on 9, muiden tehtävien maksimipistemäärä on 6 Jos tehtävässä
Työ 21 Valon käyttäytyminen rajapinnoilla. Työvuoro 40 pari 1
 Työ 21 Valon käyttäytyminen rajapinnoilla Työvuoro 40 pari 1 Tero Marttila Joel Pirttimaa TLT 78949E EST 78997S Selostuksen laati Tero Marttila Mittaukset suoritettu 12.11.2012 Selostus palautettu 19.11.2012
Työ 21 Valon käyttäytyminen rajapinnoilla Työvuoro 40 pari 1 Tero Marttila Joel Pirttimaa TLT 78949E EST 78997S Selostuksen laati Tero Marttila Mittaukset suoritettu 12.11.2012 Selostus palautettu 19.11.2012
Osoita, että kaikki paraabelit ovat yhdenmuotoisia etsimällä skaalauskuvaus, joka vie paraabelin y = ax 2 paraabelille y = bx 2. VASTAUS: , b = 2 2
 8. Geometriset kuvaukset 8.1. Euklidiset kuvaukset 344. Esitä muodossa x = Ax + b se avaruuden E 3 peilauskuvaus, jonka symmetriatasona on x 1 3x + x 3 = 6. A = 1 3 6 6 3, b = 1 1 18. 3 6 6 345. Tason
8. Geometriset kuvaukset 8.1. Euklidiset kuvaukset 344. Esitä muodossa x = Ax + b se avaruuden E 3 peilauskuvaus, jonka symmetriatasona on x 1 3x + x 3 = 6. A = 1 3 6 6 3, b = 1 1 18. 3 6 6 345. Tason
Ellipsit, hyperbelit ja paraabelit vinossa
 Ellipsit, hyperbelit ja paraabelit vinossa Matti Lehtinen 1 Ellipsi, hyperbeli ja paraabeli suorassa Opimme lukion analyyttisen geometrian kurssilla ainakin, jos kävimme lukiota vielä muutama vuosi sitten
Ellipsit, hyperbelit ja paraabelit vinossa Matti Lehtinen 1 Ellipsi, hyperbeli ja paraabeli suorassa Opimme lukion analyyttisen geometrian kurssilla ainakin, jos kävimme lukiota vielä muutama vuosi sitten
Muodonmuutostila hum 30.8.13
 Muodonmuutostila Tarkastellaan kuvan 1 kappaletta Ω, jonka pisteet siirtvät ulkoisen kuormituksen johdosta siten, että siirtmien tapahduttua ne muodostavat kappaleen Ω'. Esimerkiksi piste A siirt asemaan
Muodonmuutostila Tarkastellaan kuvan 1 kappaletta Ω, jonka pisteet siirtvät ulkoisen kuormituksen johdosta siten, että siirtmien tapahduttua ne muodostavat kappaleen Ω'. Esimerkiksi piste A siirt asemaan
= 9 = 3 2 = 2( ) = = 2
 = = 2") Ratkaisut 1.1. (a) + 5 +5 5 4 5 15 15 (b) 5 5 5 5 15 16 15 (c) 100 99 5 100 99 5 4 5 5 4 (d) 100 99 5 100 ( ) 5 1 99 100 4 99 5 1.. (a) ( 100 99 5 ) ( ( 4 ( ) ) 4 1 ( ) ) 4 9 4 16 (b) 100 99 ( 5 ) 1 100
Ratkaisut 1.1. (a) + 5 +5 5 4 5 15 15 (b) 5 5 5 5 15 16 15 (c) 100 99 5 100 99 5 4 5 5 4 (d) 100 99 5 100 ( ) 5 1 99 100 4 99 5 1.. (a) ( 100 99 5 ) ( ( 4 ( ) ) 4 1 ( ) ) 4 9 4 16 (b) 100 99 ( 5 ) 1 100
1/6 TEKNIIKKA JA LIIKENNE FYSIIKAN LABORATORIO V1.31 9.2011
 1/6 333. SÄDEOPTIIKKA JA FOTOMETRIA A. INSSIN POTTOVÄIN JA TAITTOKYVYN MÄÄRITTÄMINEN 1. Työn tavoite. Teoriaa 3. Työn suoritus Työssä perehdytään valon kulkuun väliaineissa ja niiden rajapinnoissa sädeoptiikan
1/6 333. SÄDEOPTIIKKA JA FOTOMETRIA A. INSSIN POTTOVÄIN JA TAITTOKYVYN MÄÄRITTÄMINEN 1. Työn tavoite. Teoriaa 3. Työn suoritus Työssä perehdytään valon kulkuun väliaineissa ja niiden rajapinnoissa sädeoptiikan
(a) Potentiaali ja virtafunktiot saadaan suoraan summaamalla lähteen ja pyörteen funktiot. Potentiaalifunktioksi
 Potentiaali ja virtafunktiot saadaan suoraan summaamalla lähteen ja pyörteen funktiot. Potentiaalifunktioksi") Tehtävä 1 Tornadon virtauskenttää voidaan approksimoida kaksiulotteisen nielun ja pyörteen summana Oleta, että nielun voimakkuus on m < ja pyörteen voimakkuus on > (a Määritä tornadon potentiaali- ja virtafunktiot
Tehtävä 1 Tornadon virtauskenttää voidaan approksimoida kaksiulotteisen nielun ja pyörteen summana Oleta, että nielun voimakkuus on m < ja pyörteen voimakkuus on > (a Määritä tornadon potentiaali- ja virtafunktiot
Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos. MS-A0203 Differentiaali- ja integraalilaskenta 2, kevät 2016
 Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Malinen/Ojalammi MS-A23 Differentiaali- ja integraalilaskenta 2, kevät 216 Laskuharjoitus 2A (Vastaukset) Alkuviikolla
Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Malinen/Ojalammi MS-A23 Differentiaali- ja integraalilaskenta 2, kevät 216 Laskuharjoitus 2A (Vastaukset) Alkuviikolla
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 2017 Insinöörivalinnan matematiikan koe , Ratkaisut (Sarja A)
") Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 017 Insinöörivalinnan matematiikan koe 30..017, Ratkaisut (Sarja A) 1. a) Lukujen 9, 0, 3 ja x keskiarvo on. Määritä x. (1 p.) b) Mitkä reaaliluvut
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 017 Insinöörivalinnan matematiikan koe 30..017, Ratkaisut (Sarja A) 1. a) Lukujen 9, 0, 3 ja x keskiarvo on. Määritä x. (1 p.) b) Mitkä reaaliluvut
Mb8 Koe Kuopion Lyseon lukio (KK) sivu 1/2
 sivu 1/2") Mb8 Koe 0.11.015 Kuopion Lyseon lukio (KK) sivu 1/ Kokeessa on kaksi osaa. Osa A ratkaistaan tehtäväpaperille ja osa B ratkaistaan konseptipaperille. Osa A: saat käyttää taulukkokirjaa mutta et laskinta.
Mb8 Koe 0.11.015 Kuopion Lyseon lukio (KK) sivu 1/ Kokeessa on kaksi osaa. Osa A ratkaistaan tehtäväpaperille ja osa B ratkaistaan konseptipaperille. Osa A: saat käyttää taulukkokirjaa mutta et laskinta.
Kertausosa. 5. Merkitään sädettä kirjaimella r. Kaaren pituus on tällöin r a) sin = 0, , c) tan = 0,
 sin = 0, , c) tan = 0,") Kertausosa. a),6 60 576 Peruuttaessa pyörähdyssuunta on vastapäivään. Kulma on siis,4 60 864 a) 576 864 0,88m. a) α b 0,6769... 0,68 (rad) r,m 8cm β,90...,9 (rad) 4cm a) α 0,68 (rad) β,9 (rad). a) 5,0
Kertausosa. a),6 60 576 Peruuttaessa pyörähdyssuunta on vastapäivään. Kulma on siis,4 60 864 a) 576 864 0,88m. a) α b 0,6769... 0,68 (rad) r,m 8cm β,90...,9 (rad) 4cm a) α 0,68 (rad) β,9 (rad). a) 5,0
Juuri 6 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty Vastaus: Määrittelyehto on x 1 ja nollakohta x = 1.
 Juuri 6 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 4..6 Kokoavia tehtäviä ILMAN TEKNISIÄ APUVÄLINEITÄ. a) Funktion f( ) = määrittelyehto on +, eli. + Ratkaistaan funktion nollakohdat. f(
Juuri 6 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 4..6 Kokoavia tehtäviä ILMAN TEKNISIÄ APUVÄLINEITÄ. a) Funktion f( ) = määrittelyehto on +, eli. + Ratkaistaan funktion nollakohdat. f(
9. Polarimetria. Havaitsevan tähtitieteen peruskurssi I, Syksy 2017 Thomas Hackman (Kalvot JN, TH, MG & VMP)
") 9. Polarimetria Havaitsevan tähtitieteen peruskurssi I, Syksy 2017 Thomas Hackman (Kalvot JN, TH, MG & VMP) 1 9. Polarimetria 1. Stokesin parametrit 2. Polarisaatio tähtitieteessä 3. Polarisaattorit 4.
9. Polarimetria Havaitsevan tähtitieteen peruskurssi I, Syksy 2017 Thomas Hackman (Kalvot JN, TH, MG & VMP) 1 9. Polarimetria 1. Stokesin parametrit 2. Polarisaatio tähtitieteessä 3. Polarisaattorit 4.
Juuri Kertaus Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty
 Vektorit. Vektori LUVUN. YDINTEHTÄVÄT 0. Piste P jakaa janan BC suhteessa : eli kahteen yhtä suureen osaan. Siten CP CB u ja DP DC CP DC CBv u u v. Vastaavasti DQ DA AQ DA ABu v. 7 7 0. a) Pisteen koordinaatit
Vektorit. Vektori LUVUN. YDINTEHTÄVÄT 0. Piste P jakaa janan BC suhteessa : eli kahteen yhtä suureen osaan. Siten CP CB u ja DP DC CP DC CBv u u v. Vastaavasti DQ DA AQ DA ABu v. 7 7 0. a) Pisteen koordinaatit
Juuri 4 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty Kertaus. b) B = (3, 0, 5) K2. ( )
 B = (3, 0, 5) K2. ( )") Kertaus K1. a) OA =- i + j + k K. b) B = (, 0, 5) K. a) AB = (6 -(- )) i + ( - ) j + (- -(- 7)) k = 8i - j + 4k AB = 8 + (- 1) + 4 = 64+ 1+ 16 = 81= 9 b) 1 1 ( ) AB = (--(- 1)) i + - - 1 j =-i - 4j AB
Kertaus K1. a) OA =- i + j + k K. b) B = (, 0, 5) K. a) AB = (6 -(- )) i + ( - ) j + (- -(- 7)) k = 8i - j + 4k AB = 8 + (- 1) + 4 = 64+ 1+ 16 = 81= 9 b) 1 1 ( ) AB = (--(- 1)) i + - - 1 j =-i - 4j AB
MS-A0003/A0005 Matriisilaskenta Laskuharjoitus 2 / vko 45
 MS-A0003/A0005 Matriisilaskenta Laskuharjoitus / vko 5 Tehtävä 1 (L): Hahmottele kompleksitasoon ne pisteet, jotka toteuttavat a) z 3 =, b) z + 3 i < 3, c) 1/z >. Yleisesti: ehto z = R, z C muodostaa kompleksitasoon
MS-A0003/A0005 Matriisilaskenta Laskuharjoitus / vko 5 Tehtävä 1 (L): Hahmottele kompleksitasoon ne pisteet, jotka toteuttavat a) z 3 =, b) z + 3 i < 3, c) 1/z >. Yleisesti: ehto z = R, z C muodostaa kompleksitasoon
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä.
 Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä.") MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016
Juuri 12 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty
 Juuri Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 7.5.08 Kertaus K. a) Polynomi P() = + 8 on jaollinen polynomilla Q() =, jos = on polynomin P nollakohta, eli P() = 0. P() = + 8 = 54 08 +
Juuri Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 7.5.08 Kertaus K. a) Polynomi P() = + 8 on jaollinen polynomilla Q() =, jos = on polynomin P nollakohta, eli P() = 0. P() = + 8 = 54 08 +
Preliminäärikoe Tehtävät Pitkä matematiikka 4.2.2014 1 / 3
 Preliminäärikoe Tehtävät Pitkä matematiikka / Kokeessa saa vastata enintään kymmeneen tehtävään Tähdellä (* merkittyjen tehtävien maksimipistemäärä on 9, muiden tehtävien maksimipistemäärä on 6 Jos tehtävässä
Preliminäärikoe Tehtävät Pitkä matematiikka / Kokeessa saa vastata enintään kymmeneen tehtävään Tähdellä (* merkittyjen tehtävien maksimipistemäärä on 9, muiden tehtävien maksimipistemäärä on 6 Jos tehtävässä
Ota tämä paperi mukaan, merkkaa siihen omat vastauksesi ja tarkista oikeat vastaukset klo 11:30 jälkeen osoitteesta
 MAA5.2 Loppukoe 26.9.2012 Jussi Tyni Valitse 6 tehtävää Muista merkitä vastauspaperiin oma nimesi ja tee etusivulle pisteytysruudukko Kaikkiin tehtävien ratkaisuihin välivaiheet näkyviin! 1. Olkoon vektorit
MAA5.2 Loppukoe 26.9.2012 Jussi Tyni Valitse 6 tehtävää Muista merkitä vastauspaperiin oma nimesi ja tee etusivulle pisteytysruudukko Kaikkiin tehtävien ratkaisuihin välivaiheet näkyviin! 1. Olkoon vektorit
Deformoituvan metallirakenteen fotogrammetrinen muodonmuutosmittaus
 Deformoituvan metallirakenteen fotogrammetrinen muodonmuutosmittaus Diplomityö, joka on jätetty opinnäytteenä tarkastettavaksi diplomi-insinöörin tutkintoa varten. Espoo, huhtikuu 2015 Tekniikan kandidaatti
Deformoituvan metallirakenteen fotogrammetrinen muodonmuutosmittaus Diplomityö, joka on jätetty opinnäytteenä tarkastettavaksi diplomi-insinöörin tutkintoa varten. Espoo, huhtikuu 2015 Tekniikan kandidaatti
BM20A5800 Funktiot, lineaarialgebra ja vektorit Harjoitus 4, Syksy 2016
 BM20A5800 Funktiot, lineaarialgebra ja vektorit Harjoitus 4, Syksy 2016 1. Hahmottele karkeasti funktion f : R R 2 piirtämällä sen arvoja muutamilla eri muuttujan arvoilla kaksiulotteiseen koordinaatistoon
BM20A5800 Funktiot, lineaarialgebra ja vektorit Harjoitus 4, Syksy 2016 1. Hahmottele karkeasti funktion f : R R 2 piirtämällä sen arvoja muutamilla eri muuttujan arvoilla kaksiulotteiseen koordinaatistoon
r > y x z x = z y + y x z y + y x = r y x + y x = r
 HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi I, syksy 018 Harjoitus Ratkaisuehdotukset Tehtävä 1. Osoita, että avoin kuula on avoin joukko ja suljettu kuula on suljettu joukko. Ratkaisu.
HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi I, syksy 018 Harjoitus Ratkaisuehdotukset Tehtävä 1. Osoita, että avoin kuula on avoin joukko ja suljettu kuula on suljettu joukko. Ratkaisu.
Differentiaali- ja integraalilaskenta 3 Mallit laskuharjoitukseen 3 /
 MS-A3x Differentiaali- ja integraalilaskenta 3, IV/6 Differentiaali- ja integraalilaskenta 3 Mallit laskuharjoitukseen 3 / 9..-.3. Avaruusintegraalit ja muuttujanvaihdot Tehtävä 3: Laske sopivalla muunnoksella
MS-A3x Differentiaali- ja integraalilaskenta 3, IV/6 Differentiaali- ja integraalilaskenta 3 Mallit laskuharjoitukseen 3 / 9..-.3. Avaruusintegraalit ja muuttujanvaihdot Tehtävä 3: Laske sopivalla muunnoksella
PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9.2.2011
 PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9..0 Kokeessa saa vastata enintään kymmeneen tehtävään.. Sievennä a) 9 x x 6x + 9, b) 5 9 009 a a, c) log 7 + lne 7. Muovailuvahasta tehty säännöllinen tetraedri muovataan
PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9..0 Kokeessa saa vastata enintään kymmeneen tehtävään.. Sievennä a) 9 x x 6x + 9, b) 5 9 009 a a, c) log 7 + lne 7. Muovailuvahasta tehty säännöllinen tetraedri muovataan
763306A JOHDATUS SUHTEELLISUUSTEORIAAN 2 Ratkaisut 2 Kevät 2017
 763306A JOHDATUS SUHTEELLISUUSTEORIAAN 2 Ratkaisut 2 Kevät 207. Nelinopeus ympyräliikkeessä On siis annettu kappaleen paikkaa kuvaava nelivektori X x µ : Nelinopeus U u µ on määritelty kaavalla x µ (ct,
763306A JOHDATUS SUHTEELLISUUSTEORIAAN 2 Ratkaisut 2 Kevät 207. Nelinopeus ympyräliikkeessä On siis annettu kappaleen paikkaa kuvaava nelivektori X x µ : Nelinopeus U u µ on määritelty kaavalla x µ (ct,
Käy vastaamassa kyselyyn kurssin pedanet-sivulla (TÄRKEÄ ensi vuotta ajatellen) Kurssin suorittaminen ja arviointi: vähintään 50 tehtävää tehtynä
 Kurssin suorittaminen ja arviointi: vähintään 50 tehtävää tehtynä") Käy vastaamassa kyselyyn kurssin pedanet-sivulla (TÄRKEÄ ensi vuotta ajatellen) Kurssin suorittaminen ja arviointi: vähintään 50 tehtävää tehtynä (vihkon palautus kokeeseen tullessa) Koe Mahdolliset testit
Käy vastaamassa kyselyyn kurssin pedanet-sivulla (TÄRKEÄ ensi vuotta ajatellen) Kurssin suorittaminen ja arviointi: vähintään 50 tehtävää tehtynä (vihkon palautus kokeeseen tullessa) Koe Mahdolliset testit
BM20A0900, Matematiikka KoTiB3
 BM20A0900, Matematiikka KoTiB3 Luennot: Matti Alatalo Oppikirja: Kreyszig, E.: Advanced Engineering Mathematics, 8th Edition, John Wiley & Sons, 1999, luvut 1 4. 1 Sisältö Ensimmäisen kertaluvun differentiaaliyhtälöt
BM20A0900, Matematiikka KoTiB3 Luennot: Matti Alatalo Oppikirja: Kreyszig, E.: Advanced Engineering Mathematics, 8th Edition, John Wiley & Sons, 1999, luvut 1 4. 1 Sisältö Ensimmäisen kertaluvun differentiaaliyhtälöt