8. kierros. 2. Lähipäivä
|
|
|
- Tarja Hämäläinen
- 6 vuotta sitten
- Katselukertoja:
Transkriptio
1 8. kierros 2. Lähipäivä
2 Viikon aihe Tilaestimointi Tilasäätö Saavutettavuus, ohjattavuus Tarkkailtavuus, havaittavuus
3 Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 tuntia
4 Tavoitteet: tietää Saavutettavuus Ohjattavuus Tarkkailtavuus Havaittavuus Tilaestimointi Tilasäätö
5 Tavoitteet: ymmärtää Miten saavutettavuus ja tarkkailtavuus liittyvät tilaestimointiin ja -säätöön Milloin tilaestimointia voi ja kannattaa käyttää Milloin tilasäätö voi ja kannattaa käyttää
6 Tavoitteet: soveltaa Osaa määrittää onko systeemi saavutettava tai tarkkailtava Osaa muodostaa systeemille tilaestimaattorin Osaa säätää systeemiä tilasäätimellä
7 Tietoisku I: Tilaestimointi Kaikki systeemin tilat eivät välttämättä ole aina mitattavissa Jos viime kerran mekaanisesta systeemistä olisi mitattavissa vain paikka. Nopeus on estimoitava paikkamittauksen ja ohjauksen perusteella. Mitkä ovat vaihtoehdot?
8 Tilaestimointi Datan perusteella Derivoidaan paikkaa numeerisesti saadaan nopeus Mallin perusteella Syötetään tunnetulle mallille käytetyt ohjaussignaalit ja lasketaan mallin perusteella nopeus Mallin ja datan yhdistelmällä Käytetään mallin antamaa tilaa, jota korjataan datan perusteella
9 Mekaaninen esimerkki Mitä Simulink-mallissa tapahtuu?

10 Mekaaninen esimerkki Numeerinen derivointi Malli ja yhdistelmä Huom: häiriötön tapaus!
11 Mekaaninen esimerkki Otetaan mukaan prosessi- ja mittauskohinaa
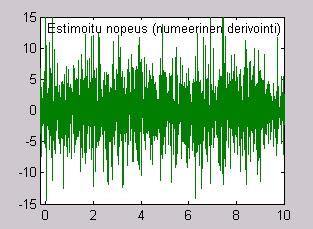

12 Numeerinen Mallin perusteella Yhdistelmä
13 Tilaestimointi Tarkastellaan mallin ja datan yhdistävää estimaattoria tarkemmin u(t) + x(t) y(t) B y C + B Tilahavaitsija + + A K A y ^ x(t) ^ ^ x(t) e(t) C + _ ^ y(t) R S T x( t) x ( t) ~ x ( t ) todellinen tila tilan estimaatti estimaatin poikkeama ~ x ( t ) = x ( t ) x ( t)
14 Tilaestimointi Tilahavaitsija x ( t ) = Ax ( t) + Bu( t) + Ke ( t) = Ax ( t) + Bu( t) + K y( t) Cx ( t) b = A KC x ( t) + Bu( t) + Ky( t) Estimaattori ja todellinen malli R S g x ( t) = Ax( t) + Bu( t) T x ( t ) = ( b Ax ) Bu( ) K y( ) Cx ( g t + t + t t) = Ax ( b t) + Bu( t) + K Cx( t) Cx ( g t) Vähennetään lausekkeet toisistaan b b g b g b gb g b g x ( t) x ( t ) = Ax ( t ) + Bu ( t ) Ax ( t) Bu( t) K Cx( t) Cx ( t) = A x( t) x ( t) KC x( t) x ( t) = A KC x( t) x ( t) ~ x ( t ) = x ( t ) x ( t) ~ x ( t ) = A KC ~ x ( t ) b g g
15 Mekaaninen esimerkki Tehdään tilahavaitsija tutulle systeemille: R S T L NM x ( t) = x( t) u( t) Ax( t) Bu( t) y( t) = 1 0 x( t) = Cx( t) O QP L + N M O Q P = + b g Lk1Q O = + + = N M P x ( t ) A KC x ( t) Bu( t) Ky( t), K Sijoittakaa estimointivirheen pienenemistä kuvaavat navat pisteeseen -5 k 2 (vihje: karakteristinen yhtälö)
16 Tilaestimointi ja -säätö r(t) T + _ u(t) + x(t) y(t) B y C + A B Tilahavaitsija + + K A y ^ x(t) ^ e(t) C + _ ^ y(t) Säädin L
17 Tilaestimointi ja -säätö Katsotaan säädetyn järjestelmän käyttäytymistä tilaestimaattoria käytettäessä R S T x ( t) = Ax( t) + Bu( t) ( ) ( ) ( ) ( ) ( ), u ( t ) = Tr ( t ) Lx ( t) x t = Ax t + Bu t + K Cx t Cx t R S T Muuttujanvaihto x ( t) = Ax( t) + BTr( t) BLx ( t) b x ( t ) = Ax ( t) + BTr( t) BLx ( t) + KC x( t) x ( t) x ( t ) = x ( t ) ~ x( t) ( ) ( ) x ( t) = Ax( t) + BTr( t) BL x( t) x( t) x ( t) x ( t) = ( A BL) x( t) x ( t) + BTr( t) + KCx ( t) x ( t) = ( A BL) x( t) + BTr( t) + BLx ( t) x ( t) = x ( t) ( A BL) x( t) + ( A BL) x ( t) BTr( t) KCx ( t) x ( t) = ( A BL) x( t) + BTr( t) + BLx ( t) x ( t) = ( A KC) x ( t) g b g
18 Tilaestimointi ja -säätö Tilaesitys lohkomatriisimuodossa L NM O QP = L NM x ( t) A BL BL x( t) BT ~ ( ) ~ r( t) x t 0 A KC x ( t ) 0 L ( ) y( ) C 0 x t t = N M~ x ( t ) O QP Karakteristinen yhtälö (huom: systeemimatriisi on yläkolmiomatriisi!) FL NM O QP L NM Tilaestimaattori ja säädin voidaan suunnitella toisistaan riippumatta! OI QP O QP L N M O Q P + L N M O Q P K.Y.: det HG si 0 A BL BL KJ det( si A BL) det( si A KC) 0 si 0 A KC = + + = 0
19 Tilaestimointi ja -säätö Yhdistetään tilaestimointi ja -säätö mekaanisessa esimerkissä RL NM S T K O QP = L NM x ( t) A BL BL x( t) BT ~ ( ) ~ r( t) x t 0 A KC x ( t ) 0 L ( ) y( ) C 0 x t t = N M~ x ( t ) L = N M 8 O Q P, L = 20 8, T = 25 4 O QP L N M O Q P L + N M O Q P Simuloikaa systeemiä Simulinkillä O QP
20 Harjoituksia!
21 Tietoisku II: Integroinnin augmentointi Tilasäätimen avulla voidaan vaikuttaa stabiilisuuteen, värähtelyihin ja nopeuteen Kerroin T mitoitetaan yleensä niin, että staattinen vahvistus on 1 ( ei pysyvää poikkeamaa) Kuormitushäiriöiden kanssa homma ei toimi häiriöt eivät näy tiloissa pysyvää poikkeamaa
22 Integroinnin augmentointi Häiriön summautuessa tiloihin säädin kyllä reagoi häiriöön, mutta T on mitoitettu poistamaan ainoastaan referenssisuureen pysyvä poikkeama loppuarvo edelleen pielessä Ratkaisu: integroidaan erosuuretta (tämä tekee samalla T-skaalauksen turhaksi)
23 Integroinnin augmentointi Systeemi ja sen tilasäädin x ( t) = Ax( t) + Bu( t), uv ( t ) = Lx ( t ) y( t) = Cx( t) Otetaan mukaan erosuureen integraali; otetaan erosuureen integraaleista uusia tilamuuttujia u( t) = u ( t) + u ( t), u ( t) = Lx( t), u ( t) = L x ( t) = L ( y ( τ ) y( τ )) dτ v I v I I I I ref 0 Ohjaus lohkomatriiseina x( t) u( t) = uv( t) + ui ( t) = Lx( t) LIxI ( t) = [ L L I ] I ( t) x Uuden tilamuuttujan derivaatta x ( t) = y ( t) y( t) = y ( t) Cx( t) I ref ref t
24 Integroinnin augmentointi Nyt saadaan x ( t) = Ax( t) BLx( t) BLIxI ( t) x ( t) = Ax( t) + Bu( t) u( t) = Lx( t) LIxI ( t), x I ( t ) = Cx ( t ) + yref ( t ) y( t) = Cx( t) x I ( t) = Cx( t) + y ref ( t) y( t) = Cx( t) x ( t) A BL BLI x( t) 0 = + r I ( t) I ( t) y ef ( t) x C 0 x I * * * * x ( t) = A x ( t) + B yref ( t) * * x( t) y( t) = C x ( t) y( t) = [ C 0] I ( t) x Karakteristinen yhtälö si A + BL BL * I K.Y.: det ( si A ) = det = 0 s C I
25 Mekaaninen esimerkki Tehkää mekaaniselle systeemille integroiva säädin, jolla säädetyn järjestelmän navat saadaan pisteeseen -1 Simuloikaa systeemiä häiriöllä, joka summautuu systeemin tiloihin
26 Harjoituksia!
27 Hakkuriteholähteet Seuraavalla kerralla
8. kierros. 1. Lähipäivä
 8. kierros 1. Lähipäivä Viikon aihe Tilaestimointi Tilasäätö Saavutettavuus, ohjattavuus Tarkkailtavuus, havaittavuus Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 tuntia Tavoitteet: tietää Saavutettavuus
8. kierros 1. Lähipäivä Viikon aihe Tilaestimointi Tilasäätö Saavutettavuus, ohjattavuus Tarkkailtavuus, havaittavuus Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 tuntia Tavoitteet: tietää Saavutettavuus
Tilaesityksen hallinta ja tilasäätö. ELEC-C1230 Säätötekniikka. Luku 6: Tilasäätö, tilaestimointi, saavutettavuus ja tarkkailtavuus
 Tilaesityksen hallinta ja tilasäätö ELEC-C1230 Säätötekniikka Luku 6: Tilasäätö, tilaestimointi, saavutettavuus ja tarkkailtavuus Edellisessä luvussa tarkasteltiin napoja ja nollia sekä niiden vaikutuksia
Tilaesityksen hallinta ja tilasäätö ELEC-C1230 Säätötekniikka Luku 6: Tilasäätö, tilaestimointi, saavutettavuus ja tarkkailtavuus Edellisessä luvussa tarkasteltiin napoja ja nollia sekä niiden vaikutuksia
3. kierros. 1. Lähipäivä
 3. kierros 1. Lähipäivä Viikon aihe (viikko 1/2) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
3. kierros 1. Lähipäivä Viikon aihe (viikko 1/2) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
H(s) + + _. Ymit(s) Laplace-tason esitykseksi on saatu (katso jälleen kalvot):
 + + _. Ymit(s) Laplace-tason esitykseksi on saatu (katso jälleen kalvot):") ELEC-C3 Säätötekniikka 5. laskuharjoitus Vastaukset Quiz: Luennon 4 luentokalvojen (luku 4) lopussa on esimerkki: Sähköpiiri (alkaa kalvon 39 tienoilla). Lue esimerkki huolellisesti ja vastaa seuraavaan:
ELEC-C3 Säätötekniikka 5. laskuharjoitus Vastaukset Quiz: Luennon 4 luentokalvojen (luku 4) lopussa on esimerkki: Sähköpiiri (alkaa kalvon 39 tienoilla). Lue esimerkki huolellisesti ja vastaa seuraavaan:
2. kierros. 2. Lähipäivä
 2. kierros 2. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Tavoitteet: tietää Yhden navan vasteen ekvivalentti kohinakaistaleveys Vastuksen terminen kohina Termit
2. kierros 2. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Tavoitteet: tietää Yhden navan vasteen ekvivalentti kohinakaistaleveys Vastuksen terminen kohina Termit
Säätötekniikkaa. Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla
 ohjaus, joka saa systeemin toimimaan halutulla tavalla") Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
2. kierros. 1. Lähipäivä
 2. kierros. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 + 4 tuntia Tavoitteet: tietää Yhden navan vasteen ekvivalentti
2. kierros. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 + 4 tuntia Tavoitteet: tietää Yhden navan vasteen ekvivalentti
Harjoitus 6: Simulink - Säätöteoria. Syksy 2006. Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1
 Harjoitus 6: Simulink - Säätöteoria Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen säätötekniikkaan Takaisinkytkennän
Harjoitus 6: Simulink - Säätöteoria Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen säätötekniikkaan Takaisinkytkennän
Y (s) = G(s)(W (s) W 0 (s)). Tarkastellaan nyt tilannetta v(t) = 0, kun t < 3 ja v(t) = 1, kun t > 3. u(t) = K p y(t) K I
 = G(s)(W (s) W 0 (s)). Tarkastellaan nyt tilannetta v(t) = 0, kun t < 3 ja v(t) = 1, kun t > 3. u(t) = K p y(t) K I") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 6. harjoituksen ratkaisut. Laplace-tasossa saadaan annetulle venttiilille W (s) W (s)
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 6. harjoituksen ratkaisut. Laplace-tasossa saadaan annetulle venttiilille W (s) W (s)
3. kierros. 2. Lähipäivä
 3. kierros. Lähipäivä Viikon aihe (viikko /) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
3. kierros. Lähipäivä Viikon aihe (viikko /) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
Säätötekniikkaa. Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla
 ohjaus, joka saa systeemin toimimaan halutulla tavalla") Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Dynaamisten systeemien teoriaa. Systeemianalyysilaboratorio II
 Dynaamisten systeemien teoriaa Systeemianalyysilaboratorio II 15.11.2017 Vakiot, sisäänmenot, ulostulot ja häiriöt Mallin vakiot Systeemiparametrit annettuja vakioita, joita ei muuteta; esim. painovoiman
Dynaamisten systeemien teoriaa Systeemianalyysilaboratorio II 15.11.2017 Vakiot, sisäänmenot, ulostulot ja häiriöt Mallin vakiot Systeemiparametrit annettuja vakioita, joita ei muuteta; esim. painovoiman
4. kierros. 1. Lähipäivä
 4. kierros 1. Lähipäivä Viikon aihe Taajuuskompensointi, operaatiovahvistin ja sen kytkennät Taajuuskompensaattorit Mitoitus Kontaktiopetusta: 8 h Kotitehtäviä: 4 h + 0 h Tavoitteet: tietää Operaatiovahvistimen
4. kierros 1. Lähipäivä Viikon aihe Taajuuskompensointi, operaatiovahvistin ja sen kytkennät Taajuuskompensaattorit Mitoitus Kontaktiopetusta: 8 h Kotitehtäviä: 4 h + 0 h Tavoitteet: tietää Operaatiovahvistimen
Lisämateriaalia: tilayhtälön ratkaisu, linearisointi. Matriisimuuttujan eksponenttifunktio:
 Lisämateriaalia: tilayhtälön ratkaisu, linearisinti Matriisimuuttujan ekspnenttifunkti: Kun A n neliömatriisi, niin määritellään 1 1 1 e I ta t A t A t A 2 6 i! At 2 2 3 3 i i jnka vidaan tdistaa knvergivan
Lisämateriaalia: tilayhtälön ratkaisu, linearisinti Matriisimuuttujan ekspnenttifunkti: Kun A n neliömatriisi, niin määritellään 1 1 1 e I ta t A t A t A 2 6 i! At 2 2 3 3 i i jnka vidaan tdistaa knvergivan
Tilayhtälötekniikasta
 Tilayhtälötekniikasta Tilayhtälöesityksessä it ä useamman kertaluvun differentiaaliyhtälö esitetään ensimmäisen kertaluvun differentiaaliyhtälöryhmänä. Jokainen ensimmäisen kertaluvun differentiaaliyhtälö
Tilayhtälötekniikasta Tilayhtälöesityksessä it ä useamman kertaluvun differentiaaliyhtälö esitetään ensimmäisen kertaluvun differentiaaliyhtälöryhmänä. Jokainen ensimmäisen kertaluvun differentiaaliyhtälö
Mat Dynaaminen optimointi, mallivastaukset, kierros 1
 Mat-214 Dynaaminen optimointi, mallivastaukset, kierros 1 1 a) Sekoitussäiliöön A virtaa puhdasta vettä virtauksella v A, säiliöstä A säiliöön B täysin sekoittunutta liuosta virtauksella v AB ja säiliöstä
Mat-214 Dynaaminen optimointi, mallivastaukset, kierros 1 1 a) Sekoitussäiliöön A virtaa puhdasta vettä virtauksella v A, säiliöstä A säiliöön B täysin sekoittunutta liuosta virtauksella v AB ja säiliöstä
Luento 2: Liikkeen kuvausta
 Luento 2: Liikkeen kuvausta Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Luennon sisältö Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Liikkeen ratkaisu kiihtyvyydestä
Luento 2: Liikkeen kuvausta Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Luennon sisältö Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Liikkeen ratkaisu kiihtyvyydestä
Harjoitus 6. KJR-C2001 Kiinteän aineen mekaniikan perusteet, IV/2016
 KJR-C001 Kiinteän aineen mekaniikan perusteet, IV/01 Kotitehtävät palautetaan viimeistään keskiviikkoisin ennen luentojen alkua eli klo 1:00 mennessä. Muistakaa vastaukset eri tehtäviin palautetaan eri
KJR-C001 Kiinteän aineen mekaniikan perusteet, IV/01 Kotitehtävät palautetaan viimeistään keskiviikkoisin ennen luentojen alkua eli klo 1:00 mennessä. Muistakaa vastaukset eri tehtäviin palautetaan eri
Osatentti
 Osatentti 2.8.205 Nimi: Opiskelijanumero: Ohjeet: Vastaa kysymyspaperiin ja kysymyksille varattuun tilaan. Laskin ei ole sallittu. Tenttikaavasto jaetaan. Kaavastoon EI merkintöjä. Palauta kaavasto tämän
Osatentti 2.8.205 Nimi: Opiskelijanumero: Ohjeet: Vastaa kysymyspaperiin ja kysymyksille varattuun tilaan. Laskin ei ole sallittu. Tenttikaavasto jaetaan. Kaavastoon EI merkintöjä. Palauta kaavasto tämän
Antti Rasila. Kevät Matematiikan ja systeemianalyysin laitos Aalto-yliopisto. Antti Rasila (Aalto-yliopisto) MS-A0204 Kevät / 16
 MS-A0204 Kevät / 16") MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio. Antti Rasila Matematiikan ja systeemianalyysin laitos
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio. Antti Rasila Matematiikan ja systeemianalyysin laitos
AS Automaation signaalinkäsittelymenetelmät. Laskuharjoitus 8. Ackermannin algoritmi Sumea säätö
 AS-84.2161 Automaation signaalinkäsittelymenetelmät Laskuharjoitus 8 Ackermannin algoritmi Sumea säätö Tilasäätö Prosessia säädetään tilojen mukaan Suljetun järjestelmän siirtofunktion navat asetellaan
AS-84.2161 Automaation signaalinkäsittelymenetelmät Laskuharjoitus 8 Ackermannin algoritmi Sumea säätö Tilasäätö Prosessia säädetään tilojen mukaan Suljetun järjestelmän siirtofunktion navat asetellaan
Älä tee mitään merkintöjä kaavakokoelmaan!
 AS-74. Alogie ääö vkokoelm v. Plu ei jälkee! Trk kokoelm ivumäärä! Älä ee miää merkiöjä kvkokoelm! Dymie mllie perukompoei. Sähköie kompoei Vu (reii) u() Ri() el (iduki) u() L di() d odeori i() C du()
AS-74. Alogie ääö vkokoelm v. Plu ei jälkee! Trk kokoelm ivumäärä! Älä ee miää merkiöjä kvkokoelm! Dymie mllie perukompoei. Sähköie kompoei Vu (reii) u() Ri() el (iduki) u() L di() d odeori i() C du()
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / Systeemitekniikka Jan 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / Systeemitekniikka Jan 2019
Ensimmäisen ja toisen kertaluvun differentiaaliyhtälöistä
 1 MAT-1345 LAAJA MATEMATIIKKA 5 Tampereen teknillinen yliopisto Risto Silvennoinen Kevät 9 Ensimmäisen ja toisen kertaluvun differentiaaliyhtälöistä Yksi tavallisimmista luonnontieteissä ja tekniikassa
1 MAT-1345 LAAJA MATEMATIIKKA 5 Tampereen teknillinen yliopisto Risto Silvennoinen Kevät 9 Ensimmäisen ja toisen kertaluvun differentiaaliyhtälöistä Yksi tavallisimmista luonnontieteissä ja tekniikassa
[ ] [ 2 [ ] [ ] ( ) [ ] Tehtävä 1. ( ) ( ) ( ) ( ) ( ) ( ) 2( ) = 1. E v k 1( ) R E[ v k v k ] E e k e k e k e k. e k e k e k e k.
![[ ] [ 2 [ ] [ ] ( ) [ ] Tehtävä 1. ( ) ( ) ( ) ( ) ( ) ( ) 2( ) = 1. E v k 1( ) R E[ v k v k ] E e k e k e k e k. e k e k e k e k.](/thumbs/70/63966855.jpg "[ ] [ 2 [ ] [ ] ( ) [ ] Tehtävä 1. ( ) ( ) ( ) ( ) ( ) ( ) 2( ) = 1. E v k 1( ) R E[ v k v k ] E e k e k e k e k. e k e k e k e k.") ehtävä. x( + ) x( y x( + e ( y x( + e ( E v E e ( ) e ( R E[ v v ] E e e e e e e e e 6 estimointivirhe: ~ x( x( x$( x( - b y ( - b y ( estimointivirheen odotusarvo: x( - b x( - b e ( - b x( - b e ( ( -
ehtävä. x( + ) x( y x( + e ( y x( + e ( E v E e ( ) e ( R E[ v v ] E e e e e e e e e 6 estimointivirhe: ~ x( x( x$( x( - b y ( - b y ( estimointivirheen odotusarvo: x( - b x( - b e ( - b x( - b e ( ( -
v AB q(t) = q(t) v AB p(t) v B V B ṗ(t) = q(t) v AB Φ(t, τ) = e A(t τ). e A = I + A + A2 2! + A3 = exp(a D (t τ)) (I + A N (t τ)), A N = =
 = q(t) v AB p(t) v B V B ṗ(t) = q(t) v AB Φ(t, τ) = e A(t τ). e A = I + A + A2 2! + A3 = exp(a D (t τ)) (I + A N (t τ)), A N = =") Mat-214 Dynaaminen optimointi Mitri Kitti Mallivastaukset kierros 1 1 a) Sekoitussäiliöön A virtaa puhdasta vettä virtauksella v A säiliöstä A säiliöön B täysin sekoittunutta liuosta virtauksella v AB
Mat-214 Dynaaminen optimointi Mitri Kitti Mallivastaukset kierros 1 1 a) Sekoitussäiliöön A virtaa puhdasta vettä virtauksella v A säiliöstä A säiliöön B täysin sekoittunutta liuosta virtauksella v AB
f (28) L(28) = f (27) + f (27)(28 27) = = (28 27) 2 = 1 2 f (x) = x 2
 L(28) = f (27) + f (27)(28 27) = = (28 27) 2 = 1 2 f (x) = x 2") BMA581 - Differentiaalilaskenta ja sovellukset Harjoitus 4, Syksy 15 1. (a) Olisiko virhe likimain.5, ja arvio antaa siis liian suuren arvon. (b) Esim (1,1.5) tai (,.5). Funktion toinen derivaatta saa
BMA581 - Differentiaalilaskenta ja sovellukset Harjoitus 4, Syksy 15 1. (a) Olisiko virhe likimain.5, ja arvio antaa siis liian suuren arvon. (b) Esim (1,1.5) tai (,.5). Funktion toinen derivaatta saa
Numeeriset menetelmät
 Numeeriset menetelmät Luento 11 Ti 11.10.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 11 Ti 11.10.2011 p. 1/34 p. 1/34 Automaattiset integrointialgoritmit Numeerisen integroinnin tarkkuuteen
Numeeriset menetelmät Luento 11 Ti 11.10.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 11 Ti 11.10.2011 p. 1/34 p. 1/34 Automaattiset integrointialgoritmit Numeerisen integroinnin tarkkuuteen
(s 2 + 9)(s 2 + 2s + 5) ] + s + 1. s 2 + 2s + 5. Tästä saadaan tehtävälle ratkaisu käänteismuuntamalla takaisin aikatasoon:
![(s 2 + 9)(s 2 + 2s + 5) ] + s + 1. s 2 + 2s + 5. Tästä saadaan tehtävälle ratkaisu käänteismuuntamalla takaisin aikatasoon:](/thumbs/58/41295146.jpg "(s 2 + 9)(s 2 + 2s + 5) ] + s + 1. s 2 + 2s + 5. Tästä saadaan tehtävälle ratkaisu käänteismuuntamalla takaisin aikatasoon:") TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2429 Systeemien Identifiointi 2 harjoituksen ratkaisut Yhtälö voitaisiin ratkaista suoraankin, mutta käytetään Laplace-muunnosta tehtävän ratkaisemisessa
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2429 Systeemien Identifiointi 2 harjoituksen ratkaisut Yhtälö voitaisiin ratkaista suoraankin, mutta käytetään Laplace-muunnosta tehtävän ratkaisemisessa
1 Di erentiaaliyhtälöt
 Taloustieteen mat.menetelmät syksy 2017 materiaali II-5 1 Di erentiaaliyhtälöt 1.1 Skalaariyhtälöt Määritelmä: ensimmäisen kertaluvun di erentiaaliyhtälö on muotoa _y = F (y; t) oleva yhtälö, missä _y
Taloustieteen mat.menetelmät syksy 2017 materiaali II-5 1 Di erentiaaliyhtälöt 1.1 Skalaariyhtälöt Määritelmä: ensimmäisen kertaluvun di erentiaaliyhtälö on muotoa _y = F (y; t) oleva yhtälö, missä _y
Differentiaali- ja integraalilaskenta 1 Ratkaisut 5. viikolle /
 MS-A8 Differentiaali- ja integraalilaskenta, V/7 Differentiaali- ja integraalilaskenta Ratkaisut 5. viikolle / 9..5. Integroimismenetelmät Tehtävä : Laske osittaisintegroinnin avulla a) π x sin(x) dx,
MS-A8 Differentiaali- ja integraalilaskenta, V/7 Differentiaali- ja integraalilaskenta Ratkaisut 5. viikolle / 9..5. Integroimismenetelmät Tehtävä : Laske osittaisintegroinnin avulla a) π x sin(x) dx,
F {f(t)} ˆf(ω) = 1. F { f (n)} = (iω) n F {f}. (11) BM20A5700 - INTEGRAALIMUUNNOKSET Harjoitus 10, viikko 46/2015. Fourier-integraali:
} ˆf(ω) = 1. F { f (n)} = (iω) n F {f}. (11) BM20A5700 - INTEGRAALIMUUNNOKSET Harjoitus 10, viikko 46/2015. Fourier-integraali:") BMA57 - INTEGRAALIMUUNNOKSET Harjoitus, viikko 46/5 Fourier-integraali: f(x) A() π B() π [A() cos x + B() sin x]d, () Fourier-muunnos ja käänteismuunnos: f(t) cos tdt, () f(t) sin tdt. (3) F {f(t)} ˆf()
BMA57 - INTEGRAALIMUUNNOKSET Harjoitus, viikko 46/5 Fourier-integraali: f(x) A() π B() π [A() cos x + B() sin x]d, () Fourier-muunnos ja käänteismuunnos: f(t) cos tdt, () f(t) sin tdt. (3) F {f(t)} ˆf()
Harjoitus Etsi seuraavien autonomisten yhtälöiden kriittiset pisteet ja tutki niiden stabiliteettia:
 Differentiaaliyhtälöt, Kesä 216 Harjoitus 2 1. Etsi seuraavien autonomisten yhtälöiden kriittiset pisteet ja tutki niiden stabiliteettia: (a) y = (2 y) 3, (b) y = (y 1) 2, (c) y = 2y y 2. 2. Etsi seuraavien
Differentiaaliyhtälöt, Kesä 216 Harjoitus 2 1. Etsi seuraavien autonomisten yhtälöiden kriittiset pisteet ja tutki niiden stabiliteettia: (a) y = (2 y) 3, (b) y = (y 1) 2, (c) y = 2y y 2. 2. Etsi seuraavien
Matematiikan perusteet taloustieteilij oille I
 Matematiikan perusteet taloustieteilijöille I Harjoitukset syksy 2006 1. Laskeskele ja sieventele a) 3 27 b) 27 2 3 c) 27 1 3 d) x 2 4 (x 8 3 ) 3 y 8 e) (x 3) 2 f) (x 3)(x +3) g) 3 3 (2x i + 1) kun, x
Matematiikan perusteet taloustieteilijöille I Harjoitukset syksy 2006 1. Laskeskele ja sieventele a) 3 27 b) 27 2 3 c) 27 1 3 d) x 2 4 (x 8 3 ) 3 y 8 e) (x 3) 2 f) (x 3)(x +3) g) 3 3 (2x i + 1) kun, x
MATLAB harjoituksia RST-säädöstä (5h)
") Digitaalinen säätöteoria MATLAB harjoituksia RST-säädöstä (5h) Enso Ikonen Oulun yliopisto, systeemitekniikan laboratorio November 25, 2008 Harjoituskerran sisältö kertausta (15 min) Napojensijoittelu
Digitaalinen säätöteoria MATLAB harjoituksia RST-säädöstä (5h) Enso Ikonen Oulun yliopisto, systeemitekniikan laboratorio November 25, 2008 Harjoituskerran sisältö kertausta (15 min) Napojensijoittelu
4. Ensimmäisen ja toisen kertaluvun differentiaaliyhtälöistä
 1 Laaja matematiikka 5 Kevät 010 4. Ensimmäisen ja toisen kertaluvun differentiaaliyhtälöistä Yksi tavallisimmista luonnontieteissä ja tekniikassa esiintyvistä matemaattisista malleista on differentiaaliyhtälö.
1 Laaja matematiikka 5 Kevät 010 4. Ensimmäisen ja toisen kertaluvun differentiaaliyhtälöistä Yksi tavallisimmista luonnontieteissä ja tekniikassa esiintyvistä matemaattisista malleista on differentiaaliyhtälö.
x = ( θ θ ia y = ( ) x.
 x.") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2429 Systeemien Identifiointi 5 harjoituksen ratkaisut Esitetään ensin systeemi tilayhtälömuodossa Tiloiksi valitaan
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2429 Systeemien Identifiointi 5 harjoituksen ratkaisut Esitetään ensin systeemi tilayhtälömuodossa Tiloiksi valitaan
Nopeus, kiihtyvyys ja liikemäärä Vektorit
 Nopeus, kiihtyvyys ja liikemäärä Vektorit Luento 2 https://geom.mathstat.helsinki.fi/moodle/course/view.php?id=360 Luennon tavoitteet: Vektorit tutuiksi Koordinaatiston valinta Vauhdin ja nopeuden ero
Nopeus, kiihtyvyys ja liikemäärä Vektorit Luento 2 https://geom.mathstat.helsinki.fi/moodle/course/view.php?id=360 Luennon tavoitteet: Vektorit tutuiksi Koordinaatiston valinta Vauhdin ja nopeuden ero
Tehtävä 1. Vaihtoehtotehtävät.
 Kem-9.47 Prosessiautomaation perusteet Tentti.4. Tehtävä. Vaihtoehtotehtävät. Oikea vastaus +,5p, väärä vastaus -,5p ja ei vastausta p Maksimi +5,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA
Kem-9.47 Prosessiautomaation perusteet Tentti.4. Tehtävä. Vaihtoehtotehtävät. Oikea vastaus +,5p, väärä vastaus -,5p ja ei vastausta p Maksimi +5,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA
Dierentiaaliyhtälöistä
 Dierentiaaliyhtälöistä Markus Kettunen 4. maaliskuuta 2009 1 SISÄLTÖ 1 Sisältö 1 Dierentiaaliyhtälöistä 2 1.1 Johdanto................................. 2 1.2 Ratkaisun yksikäsitteisyydestä.....................
Dierentiaaliyhtälöistä Markus Kettunen 4. maaliskuuta 2009 1 SISÄLTÖ 1 Sisältö 1 Dierentiaaliyhtälöistä 2 1.1 Johdanto................................. 2 1.2 Ratkaisun yksikäsitteisyydestä.....................
y (0) = 0 y h (x) = C 1 e 2x +C 2 e x e10x e 3 e8x dx + e x 1 3 e9x dx = e 2x 1 3 e8x 1 8 = 1 24 e10x 1 27 e10x = e 10x e10x
 = 0 y h (x) = C 1 e 2x +C 2 e x e10x e 3 e8x dx + e x 1 3 e9x dx = e 2x 1 3 e8x 1 8 = 1 24 e10x 1 27 e10x = e 10x e10x") BM0A5830 Differentiaaliyhtälöiden peruskurssi Harjoitus 4, Kevät 017 Päivityksiä: 1. Ratkaise differentiaaliyhtälöt 3y + 4y = 0 ja 3y + 4y = e x.. Ratkaise DY (a) 3y 9y + 6y = e 10x (b) Mikä on edellisen
BM0A5830 Differentiaaliyhtälöiden peruskurssi Harjoitus 4, Kevät 017 Päivityksiä: 1. Ratkaise differentiaaliyhtälöt 3y + 4y = 0 ja 3y + 4y = e x.. Ratkaise DY (a) 3y 9y + 6y = e 10x (b) Mikä on edellisen
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio. Mat Systeemien Identifiointi. 4. harjoitus
 TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2.4129 Systeemien Identifiointi 4. harjoitus 1. a) Laske valkoisen kohinan spektraalitiheys. b) Tarkastellaan ARMA-prosessia C(q 1 )y = D(q 1 )e,
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2.4129 Systeemien Identifiointi 4. harjoitus 1. a) Laske valkoisen kohinan spektraalitiheys. b) Tarkastellaan ARMA-prosessia C(q 1 )y = D(q 1 )e,
11. kierros. 1. Lähipäivä
 11. kierros 1. Lähipäivä Viikon aihe AD/DA-muuntimet Signaalin digitalisointi Kvantisointivirhe Kvantisointikohina Kytkinkapasitanssipiirit Mitoitus Kontaktiopetusta: 6 tuntia Kotitehtäviä: 4 tuntia Tavoitteet:
11. kierros 1. Lähipäivä Viikon aihe AD/DA-muuntimet Signaalin digitalisointi Kvantisointivirhe Kvantisointikohina Kytkinkapasitanssipiirit Mitoitus Kontaktiopetusta: 6 tuntia Kotitehtäviä: 4 tuntia Tavoitteet:
MS-A0207 Differentiaali- ja integraalilaskenta 2 Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio.
 MS-A0207 Differentiaali- ja integraalilaskenta 2 Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio. Riikka Korte Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto
MS-A0207 Differentiaali- ja integraalilaskenta 2 Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio. Riikka Korte Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt
 MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Differentiaaliyhtälöt, osa 1 Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 20 R. Kangaslampi Matriisihajotelmista
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Differentiaaliyhtälöt, osa 1 Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 20 R. Kangaslampi Matriisihajotelmista
Mat Dynaaminen optimointi, mallivastaukset, kierros Johdetaan ensiksi välttämättömät ehdot diskreettiaikaiselle optimisäätötehtävälle.
 Mat-2.148 Dynaaminen optimointi, mallivastaukset, kierros 9 1. Johdetaan ensiksi välttämättömät ehdot diskreettiaikaiselle optimisäätötehtävälle. Tilayhtälö on x k+1 = f k (x k, u k ), k = 1,..., N 1 alkuehdolla
Mat-2.148 Dynaaminen optimointi, mallivastaukset, kierros 9 1. Johdetaan ensiksi välttämättömät ehdot diskreettiaikaiselle optimisäätötehtävälle. Tilayhtälö on x k+1 = f k (x k, u k ), k = 1,..., N 1 alkuehdolla
Y (z) = z-muunnos on lineaarinen kuten Laplace-muunnoskin
 = z-muunnos on lineaarinen kuten Laplace-muunnoskin") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 3. harjoituksen ratkaisut. Vapaan vasteen löytämiseksi asetetaan ohjaukseksi u(t)
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 3. harjoituksen ratkaisut. Vapaan vasteen löytämiseksi asetetaan ohjaukseksi u(t)
Luento 4: Liikkeen kuvausta, differentiaaliyhtälöt
 Luento 4: Liikkeen kuvausta, differentiaaliyhtälöt Digress: vakio- vs. muuttuva kiihtyvyys käytännössä Kinematiikkaa yhdessä dimensiossa taustatietoa Matlab-esittelyä 1 / 20 Luennon sisältö Digress: vakio-
Luento 4: Liikkeen kuvausta, differentiaaliyhtälöt Digress: vakio- vs. muuttuva kiihtyvyys käytännössä Kinematiikkaa yhdessä dimensiossa taustatietoa Matlab-esittelyä 1 / 20 Luennon sisältö Digress: vakio-
k = 1,...,r. L(x 1 (t), x
, x") Mat-2.148 Dynaaminen optimointi Mitri Kitti/Ilkka Leppänen Mallivastaukset, kierros 6 1. Johdetaan välttämättömät ehdot funktionaalin J(y) = t g(y(t), ẏ(t),..., dr y(t), t) dt dt r ekstremaalille, kun
Mat-2.148 Dynaaminen optimointi Mitri Kitti/Ilkka Leppänen Mallivastaukset, kierros 6 1. Johdetaan välttämättömät ehdot funktionaalin J(y) = t g(y(t), ẏ(t),..., dr y(t), t) dt dt r ekstremaalille, kun
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Systeemitekniikan laboratorio Jan 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Systeemitekniikan laboratorio Jan 2019
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Parametrisoidut käyrät ja kaarenpituus
 Luento 1: Parametrisoidut käyrät ja kaarenpituus") MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Parametrisoidut käyrät ja kaarenpituus Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0202 Syksy 2015 1 / 18
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Parametrisoidut käyrät ja kaarenpituus Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0202 Syksy 2015 1 / 18
Hyvyyskriteerit. ELEC-C1230 Säätötekniikka. Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit
 Hyvyyskriteerit ELEC-C1230 Säätötekniikka Aikaisemmilla luennoilla on havainnollistettu, miten systeemien käyttäytymiseen voi vaikuttaa säätämällä niitä. Epästabiileista systeemeistä saadaan stabiileja,
Hyvyyskriteerit ELEC-C1230 Säätötekniikka Aikaisemmilla luennoilla on havainnollistettu, miten systeemien käyttäytymiseen voi vaikuttaa säätämällä niitä. Epästabiileista systeemeistä saadaan stabiileja,
Mat Systeemien identifiointi, aihepiirit 1/4
 , aihepiirit 1/4 Dynaamisten systeemien matemaattinen mallintaminen ja analyysi Matlab (System Identification Toolbox), Simulink 1. Matemaattinen mallintaminen: Mallintamisen ja mallin määritelmät Fysikaalinen
, aihepiirit 1/4 Dynaamisten systeemien matemaattinen mallintaminen ja analyysi Matlab (System Identification Toolbox), Simulink 1. Matemaattinen mallintaminen: Mallintamisen ja mallin määritelmät Fysikaalinen
Mat-2.148 Dynaaminen optimointi, mallivastaukset, kierros 5
 Mat-2.148 Dynaaminen optimointi, mallivastaukset, kierros 5 1. Kotitehtävä. 2. Lasketaan aluksi korkoa korolle. Jos korkoprosentti on r, ja korko maksetaan n kertaa vuodessa t vuoden ajan, niin kokonaisvuosikorko
Mat-2.148 Dynaaminen optimointi, mallivastaukset, kierros 5 1. Kotitehtävä. 2. Lasketaan aluksi korkoa korolle. Jos korkoprosentti on r, ja korko maksetaan n kertaa vuodessa t vuoden ajan, niin kokonaisvuosikorko
Numeeriset menetelmät TIEA381. Luento 11. Kirsi Valjus. Jyväskylän yliopisto. Luento 11 () Numeeriset menetelmät / 37
 Numeeriset menetelmät / 37") Numeeriset menetelmät TIEA381 Luento 11 Kirsi Valjus Jyväskylän yliopisto Luento 11 () Numeeriset menetelmät 24.4.2013 1 / 37 Luennon 11 sisältö Numeerisesta integroinnista ja derivoinnista Adaptiiviset
Numeeriset menetelmät TIEA381 Luento 11 Kirsi Valjus Jyväskylän yliopisto Luento 11 () Numeeriset menetelmät 24.4.2013 1 / 37 Luennon 11 sisältö Numeerisesta integroinnista ja derivoinnista Adaptiiviset
Sovelletun fysiikan pääsykoe
 Sovelletun fysiikan pääsykoe 7.6.016 Kokeessa on neljä (4) tehtävää. Vastaa kaikkiin tehtäviin. Muista kirjoittaa myös laskujesi välivaiheet näkyviin. Huom! Kirjoita tehtävien 1- vastaukset yhdelle konseptille
Sovelletun fysiikan pääsykoe 7.6.016 Kokeessa on neljä (4) tehtävää. Vastaa kaikkiin tehtäviin. Muista kirjoittaa myös laskujesi välivaiheet näkyviin. Huom! Kirjoita tehtävien 1- vastaukset yhdelle konseptille
Differentiaali- ja integraalilaskenta 2 (CHEM) MS-A0207 Hakula/Vuojamo Kurssitentti, 12.2, 2018, arvosteluperusteet
 MS-A0207 Hakula/Vuojamo Kurssitentti, 12.2, 2018, arvosteluperusteet") ifferentiaali- ja integraalilaskenta 2 (CHEM) MS-A27 Hakula/Vuojamo Kurssitentti, 2.2, 28, arvosteluperusteet T Moniosaisten tehtävien osien painoarvo on sama ellei muuta ole erikseen osoitettu. Kokeessa
ifferentiaali- ja integraalilaskenta 2 (CHEM) MS-A27 Hakula/Vuojamo Kurssitentti, 2.2, 28, arvosteluperusteet T Moniosaisten tehtävien osien painoarvo on sama ellei muuta ole erikseen osoitettu. Kokeessa
[xk r k ] T Q[x k r k ] + u T k Ru k. }.
![[xk r k ] T Q[x k r k ] + u T k Ru k. }.](/thumbs/61/45563797.jpg "[xk r k ] T Q[x k r k ] + u T k Ru k. }.") Mat-2.48 Dynaaminen optimointi Mitri Kitti/Ilkka Leppänen Mallivastaukset, kierros 3. Johdetaan lineaarisen aikainvariantin seurantatehtävän yleinen ratkaisu neliöllisellä kustannuksella. Systeemi: x k+
Mat-2.48 Dynaaminen optimointi Mitri Kitti/Ilkka Leppänen Mallivastaukset, kierros 3. Johdetaan lineaarisen aikainvariantin seurantatehtävän yleinen ratkaisu neliöllisellä kustannuksella. Systeemi: x k+
MS-A Differentiaali- ja integraalilaskenta 1 (CHEM) Harjoitus 6 loppuviikko
 Harjoitus 6 loppuviikko") MS-A0107 - Differentiaali- integraalilaskenta 1 (CHEM) Harjoitus 6 loppuviikko 1 Tehtävä Etsi seuraavien yhtälöiden yleiset ratkaisut: Ratkaisu: a) y y 2y = 4x, b) y + 4y = sin 3x, c) y + 2y + 5y = e x
MS-A0107 - Differentiaali- integraalilaskenta 1 (CHEM) Harjoitus 6 loppuviikko 1 Tehtävä Etsi seuraavien yhtälöiden yleiset ratkaisut: Ratkaisu: a) y y 2y = 4x, b) y + 4y = sin 3x, c) y + 2y + 5y = e x
Estimointi Laajennettu Kalman-suodin. AS , Automaation signaalinkäsittelymenetelmät Laskuharjoitus 4
 Estimointi Laajennettu Kalman-suodin AS-84.2161, Automaation signaalinäsittelymenetelmät Lasuharjoitus 4 Estimointi Systeemin tilaa estimoidaan, un prosessin tilamalli tunnetaan Tilamalli voi olla lineaarinen
Estimointi Laajennettu Kalman-suodin AS-84.2161, Automaation signaalinäsittelymenetelmät Lasuharjoitus 4 Estimointi Systeemin tilaa estimoidaan, un prosessin tilamalli tunnetaan Tilamalli voi olla lineaarinen
Missä mennään. systeemi. identifiointi. mallikandidaatti. validointi. malli. (fysikaalinen) mallintaminen. mallin mallin käyttötarkoitus, reunaehdot
 mallintaminen. mallin mallin käyttötarkoitus, reunaehdot") Missä mennään systeemi mallin mallin käyttötarkoitus, reunaehdot käyttö- (fysikaalinen) mallintaminen luonnonlait yms. yms. identifiointi kokeita kokeita + päättely päättely vertailu mallikandidaatti validointi
Missä mennään systeemi mallin mallin käyttötarkoitus, reunaehdot käyttö- (fysikaalinen) mallintaminen luonnonlait yms. yms. identifiointi kokeita kokeita + päättely päättely vertailu mallikandidaatti validointi
ELEC-C1230 Säätötekniikka
 Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi. Servokäyttö (0,9 op)
") LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi Servokäyttö (0,9 op) JOHDNTO Työssä tarkastellaan kestomagnetoitua tasavirtamoottoria. oneelle viritetään PI-säätäjä
LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi Servokäyttö (0,9 op) JOHDNTO Työssä tarkastellaan kestomagnetoitua tasavirtamoottoria. oneelle viritetään PI-säätäjä
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät helmikuu 2019 ENSO IKONEN PYOSYS
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät helmikuu 2019 ENSO IKONEN PYOSYS
Yleisiä integroimissääntöjä
 INTEGRAALILASKENTA, MAA9 Yleisiä integroimissääntöjä Integroiminen eli annetun funktion f integraalifunktion F määrittäminen (löytäminen) on yleisesti haastavaa. Joskus joutuu jopa arvata tai kokeilla.
INTEGRAALILASKENTA, MAA9 Yleisiä integroimissääntöjä Integroiminen eli annetun funktion f integraalifunktion F määrittäminen (löytäminen) on yleisesti haastavaa. Joskus joutuu jopa arvata tai kokeilla.
Numeerinen integrointi
 Numeerinen integrointi hum 8.0. Numeerinen integrointi Numeerisia integrointimenetelmiä on useita. Käsitellään tässä yhteydessä kuitenkin vain Gauss in integrointia, joka on elementtimenetelmän yhteydessä
Numeerinen integrointi hum 8.0. Numeerinen integrointi Numeerisia integrointimenetelmiä on useita. Käsitellään tässä yhteydessä kuitenkin vain Gauss in integrointia, joka on elementtimenetelmän yhteydessä
1 Perusteita lineaarisista differentiaaliyhtälöistä
 1 Perusteita lineaarisista differentiaaliyhtälöistä Johdetaan lineaarisen aikavariantin systeemin ẋ(t) = A(t)x(t) + B(t)u(t), x(t 0 ) = x 0 yleinen ratkaisu. Tarkastellaan ensin homogeenistä yhtälöä. Lause
1 Perusteita lineaarisista differentiaaliyhtälöistä Johdetaan lineaarisen aikavariantin systeemin ẋ(t) = A(t)x(t) + B(t)u(t), x(t 0 ) = x 0 yleinen ratkaisu. Tarkastellaan ensin homogeenistä yhtälöä. Lause
Paikannuksen matematiikka MAT
 TA M P E R E U N I V E R S I T Y O F T E C H N O L O G Y M a t h e m a t i c s Paikannuksen matematiikka MAT-45800 4..008. p.1/4 Käytännön järjestelyt Kotisivu: http://math.tut.fi/courses/mat-45800/ Luennot:
TA M P E R E U N I V E R S I T Y O F T E C H N O L O G Y M a t h e m a t i c s Paikannuksen matematiikka MAT-45800 4..008. p.1/4 Käytännön järjestelyt Kotisivu: http://math.tut.fi/courses/mat-45800/ Luennot:
ELEC-C1230 Säätötekniikka. Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit
 ELEC-C3 Säätötekniikka Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit Hyvyyskriteerit Aikaisemmilla luennoilla on havainnollistettu, miten systeemien
ELEC-C3 Säätötekniikka Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit Hyvyyskriteerit Aikaisemmilla luennoilla on havainnollistettu, miten systeemien
Matriisiteoria Harjoitus 1, kevät Olkoon. cos α sin α A(α) = . sin α cos α. Osoita, että A(α + β) = A(α)A(β). Mikä matriisi A(α)A( α) on?
 = . sin α cos α. Osoita, että A(α + β) = A(α)A(β). Mikä matriisi A(α)A( α) on?") Harjoitus 1, kevät 007 1. Olkoon [ ] cos α sin α A(α) =. sin α cos α Osoita, että A(α + β) = A(α)A(β). Mikä matriisi A(α)A( α) on?. Olkoon a x y A = 0 b z, 0 0 c missä a, b, c 0. Määrää käänteismatriisi
Harjoitus 1, kevät 007 1. Olkoon [ ] cos α sin α A(α) =. sin α cos α Osoita, että A(α + β) = A(α)A(β). Mikä matriisi A(α)A( α) on?. Olkoon a x y A = 0 b z, 0 0 c missä a, b, c 0. Määrää käänteismatriisi
Säätötekniikan matematiikan verkkokurssi, Matlab tehtäviä ja vastauksia 29.7.2002
 Matlab tehtäviä 1. Muodosta seuraavasta differentiaaliyhtälöstä siirtofuntio. Tämä differentiaaliyhtälö saattaisi kuvata esimerkiksi yksinkertaista vaimennettua jousi-massa systeemiä, johon on liitetty
Matlab tehtäviä 1. Muodosta seuraavasta differentiaaliyhtälöstä siirtofuntio. Tämä differentiaaliyhtälö saattaisi kuvata esimerkiksi yksinkertaista vaimennettua jousi-massa systeemiä, johon on liitetty
Aikatason vaste vs. siirtofunktio Tehtävä
 Aikatason vaste vs. siirtofunktio Tehtävä Millainen toisen kertaluvun siirtofunktio vastaa systeemiä jonka ylitys on 10% ja asettumisaika 4 min? Y s X s = 2 n s 2 2 2 n s n M p =e t r 1.8 n t s 4.6 n 1
Aikatason vaste vs. siirtofunktio Tehtävä Millainen toisen kertaluvun siirtofunktio vastaa systeemiä jonka ylitys on 10% ja asettumisaika 4 min? Y s X s = 2 n s 2 2 2 n s n M p =e t r 1.8 n t s 4.6 n 1
Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C (s+1)(s+0.02) 50s+1
 Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C (s+1)(s+0.02) 50s+1") ENSO IKONEN PYOSYS Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C. 1 P(s) = -----------------(s+1)(s+0.02) C(s) = 50s+1 --------50s Piirrä vasteet asetusarvosta. Kommentoi
ENSO IKONEN PYOSYS Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C. 1 P(s) = -----------------(s+1)(s+0.02) C(s) = 50s+1 --------50s Piirrä vasteet asetusarvosta. Kommentoi
Harjoitus 5 -- Ratkaisut
 Harjoitus -- Ratkaisut 1 Ei kommenttia. Tutkittava funktio oskilloi äärettömän tiheään nollan lähellä. PlotPoints-asetus määrää, kuinka tiheästi Plot-funktio ottaa piirrettävästä funktiosta "näytteitä"
Harjoitus -- Ratkaisut 1 Ei kommenttia. Tutkittava funktio oskilloi äärettömän tiheään nollan lähellä. PlotPoints-asetus määrää, kuinka tiheästi Plot-funktio ottaa piirrettävästä funktiosta "näytteitä"
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka
Luento 9: Yhtälörajoitukset optimoinnissa
 Luento 9: Yhtälörajoitukset optimoinnissa Lagrangen kerroin Oletetaan aluksi, että f, g : R R. Merkitään (x 1, x ) := (x, y) ja johdetaan Lagrangen kerroin λ tehtävälle min f(x, y) s.t. g(x, y) = 0 Olkoon
Luento 9: Yhtälörajoitukset optimoinnissa Lagrangen kerroin Oletetaan aluksi, että f, g : R R. Merkitään (x 1, x ) := (x, y) ja johdetaan Lagrangen kerroin λ tehtävälle min f(x, y) s.t. g(x, y) = 0 Olkoon
MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 4: Ketjusäännöt ja lineaarinen approksimointi
 MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 4: Ketjusäännöt ja lineaarinen approksimointi Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät 2016 1 Perustuu
MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 4: Ketjusäännöt ja lineaarinen approksimointi Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät 2016 1 Perustuu
ẋ(t) = s x (t) + f x y(t) u x x(t) ẏ(t) = s y (t) + f y x(t) u y y(t),
 = s x (t) + f x y(t) u x x(t) ẏ(t) = s y (t) + f y x(t) u y y(t),") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Mat-2.4129 Systeemien Identifiointi 1. harjoituksen ratkaisut 1. Tarkastellaan maita X ja Y. Olkoon näiden varustelutaso
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Mat-2.4129 Systeemien Identifiointi 1. harjoituksen ratkaisut 1. Tarkastellaan maita X ja Y. Olkoon näiden varustelutaso
Funktiojonot ja funktiotermiset sarjat Funktiojono ja funktioterminen sarja Pisteittäinen ja tasainen suppeneminen
 4. Funktiojonot ja funktiotermiset sarjat 4.1. Funktiojono ja funktioterminen sarja 60. Tutki, millä muuttujan R arvoilla funktiojono f k suppenee, kun Mikä on rajafunktio? a) f k () = 2k 2k + 1, b) f
4. Funktiojonot ja funktiotermiset sarjat 4.1. Funktiojono ja funktioterminen sarja 60. Tutki, millä muuttujan R arvoilla funktiojono f k suppenee, kun Mikä on rajafunktio? a) f k () = 2k 2k + 1, b) f
PID-sa a timen viritta minen Matlabilla ja simulinkilla
 PID-sa a timen viritta minen Matlabilla ja simulinkilla Kriittisen värähtelyn menetelmä Tehtiin kuvan 1 mukainen tasavirtamoottorin piiri PID-säätimellä. Virittämistä varten PID-säätimen ja asetettiin
PID-sa a timen viritta minen Matlabilla ja simulinkilla Kriittisen värähtelyn menetelmä Tehtiin kuvan 1 mukainen tasavirtamoottorin piiri PID-säätimellä. Virittämistä varten PID-säätimen ja asetettiin
Harjoitus 6: Symbolinen laskenta II (Mathematica)
") Harjoitus 6: Symbolinen laskenta II (Mathematica) MS-C2107 Sovelletun matematiikan tietokonetyöt MS-C2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Differentiaaliyhtälöiden ja differentiaaliyhtälösysteemien
Harjoitus 6: Symbolinen laskenta II (Mathematica) MS-C2107 Sovelletun matematiikan tietokonetyöt MS-C2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Differentiaaliyhtälöiden ja differentiaaliyhtälösysteemien
Alias-ilmiö eli taajuuden laskostuminen
 Prosessiorientoituneet mallit Todellista hybridijärjestelmää ELEC-C1230 Säätötekniikka Luku 12: Näytteenottoteoreema ja jatkuvien säätimien diskreetit approksimaatiot Prosessiorientoituneet mallit katsotaan
Prosessiorientoituneet mallit Todellista hybridijärjestelmää ELEC-C1230 Säätötekniikka Luku 12: Näytteenottoteoreema ja jatkuvien säätimien diskreetit approksimaatiot Prosessiorientoituneet mallit katsotaan
x 4 e 2x dx Γ(r) = x r 1 e x dx (1)
 = x r 1 e x dx (1)") HY / Matematiikan ja tilastotieteen laitos Todennäköisyyslaskenta IIA, syksy 217 217 Harjoitus 6 Ratkaisuehdotuksia Tehtäväsarja I 1. Laske numeeriset arvot seuraaville integraaleille: x 4 e 2x dx ja 1
HY / Matematiikan ja tilastotieteen laitos Todennäköisyyslaskenta IIA, syksy 217 217 Harjoitus 6 Ratkaisuehdotuksia Tehtäväsarja I 1. Laske numeeriset arvot seuraaville integraaleille: x 4 e 2x dx ja 1
Pakotettu vaimennettu harmoninen värähtelijä Resonanssi
 Pakotettu vaimennettu harmoninen värähtelijä Resonanssi Tällä luennolla tavoitteena Mikä on pakkovoiman aiheuttama vaikutus vaimennettuun harmoniseen värähtelijään? Mikä on resonanssi? Kertaus: energian
Pakotettu vaimennettu harmoninen värähtelijä Resonanssi Tällä luennolla tavoitteena Mikä on pakkovoiman aiheuttama vaikutus vaimennettuun harmoniseen värähtelijään? Mikä on resonanssi? Kertaus: energian
ACKERMANNIN ALGORITMI. Olkoon järjestelmä. x(k+1) = Ax(k) + Bu(k)
 = Ax(k) + Bu(k)") ACKERMANNIN ALGORITMI Olkoon järjestelmä x(k+1) = Ax( + Bu( jossa x( = tilavektori (n x 1) u( = ohjaus (skalaari) A (n x n matriisi) B (n x 1 matriisi) Oletetaan, että ohjaus u( = Kx( on rajoittamaton.
ACKERMANNIN ALGORITMI Olkoon järjestelmä x(k+1) = Ax( + Bu( jossa x( = tilavektori (n x 1) u( = ohjaus (skalaari) A (n x n matriisi) B (n x 1 matriisi) Oletetaan, että ohjaus u( = Kx( on rajoittamaton.
MS-A0004/MS-A0006 Matriisilaskenta Laskuharjoitus 6 / vko 42
 MS-A0004/MS-A0006 Matriisilaskenta Laskuharjoitus 6 / vko 42 Tehtävät 1-4 lasketaan alkuviikon harjoituksissa ryhmissä, ja ryhmien ratkaisut esitetään harjoitustilaisuudessa (merkitty kirjaimella L = Lasketaan).
MS-A0004/MS-A0006 Matriisilaskenta Laskuharjoitus 6 / vko 42 Tehtävät 1-4 lasketaan alkuviikon harjoituksissa ryhmissä, ja ryhmien ratkaisut esitetään harjoitustilaisuudessa (merkitty kirjaimella L = Lasketaan).
Agenda. Johdanto Säätäjiä. Mittaaminen. P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen
 8. Luento: Laitteiston ohjaaminen Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen Johdanto Tavoitteena: tunnistaa
8. Luento: Laitteiston ohjaaminen Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen Johdanto Tavoitteena: tunnistaa
Mat Dynaaminen optimointi, mallivastaukset, kierros Johdetaan välttämättömät ehdot funktionaalin. g(y(t), ẏ(t),...
, ẏ(t),...") Mat-2.148 Dynaaminen optimointi, mallivastaukset, kierros 6 1. Johdetaan välttämättömät ehdot funktionaalin J(y) = g(y(t), ẏ(t),..., dr y(t), t) dt dt r ekstremaalille, kun ja t f ovat kiinteitä ja tiedetään
Mat-2.148 Dynaaminen optimointi, mallivastaukset, kierros 6 1. Johdetaan välttämättömät ehdot funktionaalin J(y) = g(y(t), ẏ(t),..., dr y(t), t) dt dt r ekstremaalille, kun ja t f ovat kiinteitä ja tiedetään
= ( 1) 2 u tt (x, t) = u tt (x, t)
 2 u tt (x, t) = u tt (x, t)") Harjoitukset 6, syksy 017 1. Osoita, ettei ajan suunnalla ole merkitystä aaltoyhtälössä: Jos u on ratkaisu, niin U(x, t) = u(x, t) on myös ratkaisu (toisin kuin lämpöyhtälön tapauksessa). Todistus. Funktion
Harjoitukset 6, syksy 017 1. Osoita, ettei ajan suunnalla ole merkitystä aaltoyhtälössä: Jos u on ratkaisu, niin U(x, t) = u(x, t) on myös ratkaisu (toisin kuin lämpöyhtälön tapauksessa). Todistus. Funktion
MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 8: Newtonin iteraatio. Taso- ja avaruusintegraalit
 MS-A25/MS-A26 ifferentiaali- ja integraalilaskenta 2 Luento 8: Newtonin iteraatio. Taso- ja avaruusintegraalit Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät 216 1 Perustuu
MS-A25/MS-A26 ifferentiaali- ja integraalilaskenta 2 Luento 8: Newtonin iteraatio. Taso- ja avaruusintegraalit Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät 216 1 Perustuu
Amazon.com: $130,00. Osia, jaetaan opetusmonisteissa
 1 Kurssin käytännön järjestelyt Luennot (12 kpl) tiistaisin klo 9 12 luokassa Y313 Luennoitsija TkT Mitri Kitti Vastaanotto luentojen yhteydessä email: mitri.kitti@hse.fi Luentomoniste kurssin verkkosivuilla
1 Kurssin käytännön järjestelyt Luennot (12 kpl) tiistaisin klo 9 12 luokassa Y313 Luennoitsija TkT Mitri Kitti Vastaanotto luentojen yhteydessä email: mitri.kitti@hse.fi Luentomoniste kurssin verkkosivuilla
Lisä,etopake3 2: ra,onaalifunk,on integroin,
 9/20/ Lisä,etopake 2: ra,onaalifunk,on integroin, Ra,onaalifunk,o: kahden polynomin P(x) ja Q(x) osamäärä. Esim. x 2 x + 2 tai x5 +6x x- Ra,onaalifunk,o voidaan aina integroida, ja tähän löytyy kajava
9/20/ Lisä,etopake 2: ra,onaalifunk,on integroin, Ra,onaalifunk,o: kahden polynomin P(x) ja Q(x) osamäärä. Esim. x 2 x + 2 tai x5 +6x x- Ra,onaalifunk,o voidaan aina integroida, ja tähän löytyy kajava
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 4: Ketjusäännöt ja lineaarinen approksimointi
 Luento 4: Ketjusäännöt ja lineaarinen approksimointi") MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 4: Ketjusäännöt ja lineaarinen approksimointi Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0202 Syksy 2015 1
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 4: Ketjusäännöt ja lineaarinen approksimointi Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0202 Syksy 2015 1
Matemaattinen Analyysi
 Vaasan yliopisto, 009-010 / ORMS1010 Matemaattinen Analyysi 8. harjoitus 1. Ratkaise y + y + y = x. Kommentti: Yleinen työlista ratkaistaessa lineaarista, vakiokertoimista toisen kertaluvun differentiaaliyhtälöä
Vaasan yliopisto, 009-010 / ORMS1010 Matemaattinen Analyysi 8. harjoitus 1. Ratkaise y + y + y = x. Kommentti: Yleinen työlista ratkaistaessa lineaarista, vakiokertoimista toisen kertaluvun differentiaaliyhtälöä
5 Differentiaaliyhtälöryhmät
 5 Differentiaaliyhtälöryhmät 5.1 Taustaa ja teoriaa Differentiaaliyhtälöryhmiä tarvitaan useissa sovelluksissa. Toinen motivaatio yhtälöryhmien käytölle: Korkeamman asteen differentiaaliyhtälöt y (n) =
5 Differentiaaliyhtälöryhmät 5.1 Taustaa ja teoriaa Differentiaaliyhtälöryhmiä tarvitaan useissa sovelluksissa. Toinen motivaatio yhtälöryhmien käytölle: Korkeamman asteen differentiaaliyhtälöt y (n) =
Dynaamisten systeemien identifiointi 1/2
 Dynaamisten systeemien identifiointi 1/2 Mallin rakentaminen mittausten avulla Epäparametriset menetelmät: tuloksena malli, joka ei perustu parametreille impulssi-, askel- tai taajusvaste siirtofunktion
Dynaamisten systeemien identifiointi 1/2 Mallin rakentaminen mittausten avulla Epäparametriset menetelmät: tuloksena malli, joka ei perustu parametreille impulssi-, askel- tai taajusvaste siirtofunktion
MS-A010{3,4,5} (ELEC*, ENG*) Differentiaali- ja integraalilaskenta 1 Luento 10: Ensimmäisen kertaluvun differentiaaliyhtälö
 Differentiaali- ja integraalilaskenta 1 Luento 10: Ensimmäisen kertaluvun differentiaaliyhtälö") MS-A010{3,4,5} (ELEC*, ENG*) Differentiaali- ja integraalilaskenta 1 Luento 10: Ensimmäisen kertaluvun differentiaaliyhtälö Pekka Alestalo, Jarmo Malinen Aalto-yliopisto, Matematiikan ja systeemianalyysin
MS-A010{3,4,5} (ELEC*, ENG*) Differentiaali- ja integraalilaskenta 1 Luento 10: Ensimmäisen kertaluvun differentiaaliyhtälö Pekka Alestalo, Jarmo Malinen Aalto-yliopisto, Matematiikan ja systeemianalyysin
Integrointialgoritmit molekyylidynamiikassa
 Integrointialgoritmit molekyylidynamiikassa Markus Ovaska 28.11.2008 Esitelmän kulku MD-simulaatiot yleisesti Integrointialgoritmit: mitä integroidaan ja miten? Esimerkkejä eri algoritmeista Hyvän algoritmin
Integrointialgoritmit molekyylidynamiikassa Markus Ovaska 28.11.2008 Esitelmän kulku MD-simulaatiot yleisesti Integrointialgoritmit: mitä integroidaan ja miten? Esimerkkejä eri algoritmeista Hyvän algoritmin
Jos siis ohjausrajoitusta ei olisi, olisi ratkaisu triviaalisti x(s) = y(s). Hamiltonin funktio on. p(0) = p(s) = 0.
 = y(s). Hamiltonin funktio on. p(0) = p(s) = 0.") Mat-.148 Dynaaminen optimointi Mitri Kitti/Ilkka Leppänen Mallivastaukset, kierros 1 1. Olkoon maaston korkeus y(s) derivoituva funktio ja etsitään tien profiilia x(s). Päätösmuuttuja on tien jyrkkyys
Mat-.148 Dynaaminen optimointi Mitri Kitti/Ilkka Leppänen Mallivastaukset, kierros 1 1. Olkoon maaston korkeus y(s) derivoituva funktio ja etsitään tien profiilia x(s). Päätösmuuttuja on tien jyrkkyys
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää