Rakenteiden mekaniikan menetelmiä metallirakentajille OSA 1 Elementtimenetelmän alkeet
|
|
|
- Katriina Salonen
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
1 Rakenteiden mekaniikan menetelmiä metallirakentajille OSA Elementtimenetelmän alkeet Reijo Kouhia TKK Rakenteiden mekaniikka..25 Metallirakentamisen tutkimuskeskus, Seinäjoki
2 MEKANIIKAN ONGELMIEN RAKENNE σ B σ = f f σ = Cε B CBu = f ε ε = Bu u Reijo Kouhia, 25 2/44
3 VIRTUAALINEN TYÖ σ B σ = f f σ = Cε δε δε = Bδu δu δw int = V δw int = δw ext = δufdv V δεσdv = (Bδu)σdV = V V δub σdv Reijo Kouhia, 25 3/44
4 ONGELMATYYPIT tasapainotehtävät (elliptinen) esim. (EAu ) = f, (EIv ) = f etenemistehtävät diffuusioprobleema (parabolinen) esim. liikeyhtälö (hyperbolinen) esim. ρc u t k u = f ρa 2 v t 2 + EI 4 v x 4 = Reijo Kouhia, 25 4/44
5 ESIMERKKIONGELMA Vahva muoto (differentiaaliyhtälömuoto) { (EAu ) = f kun x (, L) u() = ja N(L) = EAu (L) = N L Heikko muoto (variaatiomuoto) L w[ (EAu ) f] dx + w(l)[eau (L) N L ] = Reijo Kouhia, 25 5/44
6 LIKIRATKAISU n n u u likir = φ i (x)α i w = ψ i (x)ˆα i i= i= Heikko muoto [ n ] L ˆα k ψ k ( (EAu likir) f)dx + ψ k (L)(EAu likir(l) N L ) k= = eli L ψ k R(u likir )dx + ψ k (L)(EAu likir(l) N L ) =, k =,..., n, () missä R on jäännös eli residuaali Yhtälö () määrittelee painotettujen jäännösten menetelmän Reijo Kouhia, 25 6/44
7 HEIKKOJA MUOTOJA L w( (EAu likir) f)dx + w(l)(eau likir(l) N L ) = Mikäli painofunktio w riittävän säännöllinen, voidaan osittaisintegroida L weau likir + L w EAu likirdx L wfdx + w(l)(eau likir(l) N L ) = Jos w() = niin L w EAu likirdx = L wfdx + w(l)n L Reijo Kouhia, 25 7/44
8 GALERKININ MENETELMÄ Galerkinin menetelmässä valitaan ψ i = φ i. Osittaisintegroimaton heikko muoto n ˆα i i= L n φ i ( (EA φ j) α j f)dx + φ i (L)( j= j= n (EAφ j (L)α j ) N L ) = Osittaisintegroitu muoto n ˆα i i= L (φ iea n φ jα j φ i f)dx φ i (L)N L = j= Reijo Kouhia, 25 8/44
9 GALERKININ MENETELMÄ (jatkoa) Lyhyesti n i= n ˆα i K ij α j f i = j= matriisimerkinnöin ˆα T (Kα f) = Kα = f missä K ij = L φ ieaφ j dx, f i = L φ i f dx Reijo Kouhia, 25 9/44
10 FYSIKAALINEN TULKINTA VIRTUAALINEN TYÖ Osittaisintegroitu muoto L w EAu dx = L wfdx + w(l)n L Kirjoitetaan mekaniikassa usein käytetyllä tavalla (w = δu) L δɛndx = L δuf + δu(l)n L missä virtuaalinen venymä δɛ = δu Reijo Kouhia, 25 /44
11 HEIKKOJEN MUOTOJEN VERTAILUA Painotettu differentiaaliyhtälömuoto L Osittaisintegroitu muoto w( (EAu ) f)dx + w(l)(eau (L) N L ) = L w EAu dx = L wfdx + w(l)n L MITÄ EROA?? Reijo Kouhia, 25 /44
12 ELEMENTTIMENETELMÄ Sovellus painotettujen jäännösten menetelmästä u(x) = n+ i= φ i (x)α i nyt α i = u i φ φ 2 φ 3 φ i φ n+ 2 () 2 (2) 2 (3) 2 2 (i ) 2 (i) (n) x = i i i + n n + x = L L w EAu dx = L wfdx + w(l)n L Reijo Kouhia, 25 2/44
13 φ i û = φ i x i x i x i+ ũ φ i φ i φ i x i 2 x i x i x i+ x i+2 xi x i dφ i dx EAdφ i dx dxu i + xi+ x i dφ xi+ i dx EAdφ i dx dxu i + x i dφ i dx EAdφ i+ dx dxu i+ = xi+ x i φ i fdx. Reijo Kouhia, 25 3/44
14 Elementtimenetelmän perusosat Elementtityypin määrittely vaatiin. elementin muodon eli geometrian (jana, kolmio, nelikulmio, tetraedri, särmiö, jne.), 2. interpoloivien funktioiden ja 3. elementin vapaiden parametrien eli vapausasteiden määrittelyn. Reijo Kouhia, 25 4/44
15 Interpolaatiofunktiot Ratkaistavia suureita kuvataan interpolaatiofunktioilla (kutsutaan usein myös muotofunktioiksi). Näitä on ainakin kahta perustyyppiä:. tavanomaisiin, eli solmuihin sidottuihin ja 2. hierarkisiin interpolaatiofunktioihin. Reijo Kouhia, 25 5/44
16 Paikallinen koordinaatti ξ = 2 x x c, ξ (, ) h 3 h (e) + x x c x 2 3 ξ x Reijo Kouhia, 25 6/44
17 Lagrangen solmuihin sidottu interpolaatio l p k (ξ) = (ξ ξ )(ξ ξ ) (ξ ξ k )(ξ ξ k+ ) (ξ ξ p ) (ξ k ξ )(ξ k ξ ) (ξ k ξ k )(ξ k ξ k+ ) (ξ k ξ p ), l p k (ξ) toteuttaa l p k (ξ k) =, ja l p k (ξ i) =, i k Reijo Kouhia, 25 7/44
18 Lineaarinen interpolaatio N (ξ) = l(ξ) = 2 ( ξ), N 2 (ξ) = l(ξ) = 2 ( + ξ)..5 N N ξ Reijo Kouhia, 25 8/44
19 Kvadraattinen interpolaatio N (ξ) = l(ξ) 2 = 2ξ(ξ ), N 2 (ξ) = l 2 (ξ) = ξ 2, N 3 (ξ) = l2(ξ) 2 = 2ξ( + ξ),.5 N N 2 N ξ Reijo Kouhia, 25 9/44
20 Kuubinen interpolaatio N (ξ) = l(ξ) 3 = 9 6 (ξ + 3 )(ξ 3 )(ξ ), N 2 (ξ) = l(ξ) 3 = 27 6 (ξ + )(ξ 3 )(ξ ), N 3 (ξ) = l2(ξ) 3 = 27 6 (ξ + )(ξ + 3 )(ξ ), N 4 (ξ) = l3(ξ) 3 = 9 6 (ξ + )(ξ + 3 )(ξ 3 )..5 N N 2 N 3 N ξ Reijo Kouhia, 25 2/44
21 Hierarkinen kantapolynomijärjestelmä Hyöty: mahdollisimman hyvä numeerinen stabiilius N (ξ) = 2 ( ξ), N 2(ξ) = 2 ( + ξ), N i(ξ) = ψ i (ξ), i = 3, 4,..., p +, jossa ψ j määritellään Legendren polynomien P j avulla: ψ j (ξ) = 2j 2 ξ P j (t)dt, j = 2, 3,... Legendren polynomit P n (ξ) ovat Legendren differentiaaliyhtälön ( ξ 2 )y 2ξy + n(n + )y =, < ξ < ratkaisuja, kun n =,, 2,... ja y = dy/dξ, Reijo Kouhia, 25 2/44
22 Kaksi ensimmäistä ovat: P (ξ) = ja P (ξ) = ξ Korkeamman asteen polynomit voidaan generoida Bonnetin rekursiokaavalla (n + )P n+ (ξ) = (2n + )ξp n (ξ) np n (ξ), n =, 2,... Kuplamuodot N 3,..., N N 4 N N 6 N ξ ξ Reijo Kouhia, 25 22/44
23 Ortogonaalisuus Legendren polynomeille P i (ξ)p j (ξ)dξ = 2 2i +, jos i = j, jos i j. Interpolaatiofunktioille N i = ψ i : seuraa ψ j (ξ) = 2j 2 dψ i dξ ξ dψ j dξ dξ = P j (t)dt j = 2, 3,... {, jos i = j,, jos i j. Reijo Kouhia, 25 23/44
24 Elementtimatriisit L w EAu dx = Interpolaatio elementin alueella L wf dx + w(l)n L ũ(x) (e) = ũ(ξ(x)) (e) = 2 N i (ξ(x))u i = N (ξ)u +N 2 (ξ)u 2 = 2 ( ξ)u + 2 (+ξ)u 2 i= Diskreetti heikko muoto N e= 2 j= x (e) 2 x (e) EA dn i dx dn j dx dx u j = N e= x (e) 2 x (e) N i f dx, i =, 2 Integrointi ξ-koordinaatistossa x ξ, rajat x (e) ja x (e) 2 + Reijo Kouhia, 25 24/44
25 x (e) 2 x (e) EA dn i dx x (e) 2 x (e) dn j dx dx = N i f dx = EA dn i dξ N i fj dξ, dn j dξ J dξ, missä J = dx/dξ = 2 h(e) = 2 (x(e) 2 x (e) ). Derivaatoille pätee d dx = dξ dx d dξ = J d dξ = 2 d h (e) dξ. K (e) = [ K (e) K (e) 2 K (e) 2 K (e) 22 ], u (e) = { u (e) u (e) 2 }, f (e) = { f (e) f (e) 2 } Reijo Kouhia, 25 25/44
26 Elementtimatriisin ja kuormavektorin alkiot K (e) ij = 2 h (e) EA dn i dξ dn j dξ dξ, f i = 2 h(e) fn i dξ. Matriisimerkinnöin K (e) = Ω (e) B T DB dv, f (e) = Ω (e) N T f dv. HUOMAA: matriisi B on kinemaattisen operaattorin B diskreetti vastina ja matriisi B T on tasapaino-operaattorin B diskreetti vastine. Matriisi D on materiaalin jäykkyysmatriisi. (Katso kalvoa 2.) Lineaarinen interpolaatio tuottaa (EA = vakio) K (e) = EA h (e) [ ]. Reijo Kouhia, 25 26/44
27 Kvadraattinen interpolaatio K (e) = EA 3h (e) (2) Hierarkinen kantajärjestelmä K (e) = EA h (e) Reijo Kouhia, 25 27/44
28 2-D ELEMENTTITYYPPEJÄ Kolmioelementit Pascalin kolmio polynomin aste p n kolmioelementtien solmukonfiguraatiot x y x 2 xy y 2 x 3 x 2 y xy 2 y 3 x 4 x 3 y x 2 y 2 xy 3 y Reijo Kouhia, 25 28/44
29 Nelikulmioelementit Lagrange Supistettu Lagrange eli Serendipity elementit Reijo Kouhia, 25 29/44
30 Lagrangen kantapolynomit (2-D) ξ η ξ 2 ξη η 2 ξ 3 ξ 2 η ξη 2 η 3 ξ 4 ξ 3 η ξ 2 η 2 ξη 3 η 4 ξ 4 η ξ 3 η 2 ξ 2 η 3 ξη 4 ξ 4 η 2 ξ 3 η 3 ξ 2 η 4 ξ 4 η 3 ξ 3 η 4 ξ 4 η 4 Reijo Kouhia, 25 3/44
31 Supistettu Lagrangen kanta (2-D) ξ η ξ 2 ξη η 2 ξ 3 ξ 2 η ξη 2 η 3 ξ 4 ξ 3 η ξ 2 η 2 ξη 3 η 4 ξ 4 η ξη 4 Reijo Kouhia, 25 3/44
32 PARAMETRINEN KUVAUS Interpolaatio määritellään perusjanalla, perusneliössä, peruskolmiossa, peruskuutiossa jne. Esim. siirtymät 2-D:ssa u = m N i (ξ, η)u i, v = i= m N i (ξ, η)v i, i= geometria interpoloidaan vastaavasti x = m Ni (ξ, η)x i, y = i= m Ni (ξ, η)y i, i= x i ja y i elementin solmujen koordinaatit ja N i ovat muotofunktioita. Mikäli N i = N i elementtiä sanotaan isoparametriseksi Reijo Kouhia, 25 32/44
33 Peruskolmio ja perusneliö 2 η (, ) 3 (, ) (, ) ξ η ξ Kolmiolle N = ξ, N 2 = η, N 3 = ξ η Nelikulmiolle N i (ξ, η) = 2 ( + ξ iξ) 2 ( + η iη) = 4 ( + ξ iξ)( + η i η), Reijo Kouhia, 25 33/44
34 η ξ N (ξ, η) = 4 ( ξ)( η), N 2 (ξ, η) = 4 ( + ξ)( η), N 3 (ξ, η) = 4 ( + ξ)( + η), N 4 (ξ, η) = 4 ( ξ)( + η), Reijo Kouhia, 25 34/44
35 Derivaatat parametrisissa elementeissä Kuvauksen muunnosmatriisi saadaan kun lasketaan funktion u(x, y) = u(x(ξ, η), y(ξ, η)) derivaattojen lausekkeet peruselementin koordinaattien ξ ja η suhteen: u ξ u η = u x x ξ + u y y ξ, = u x x η + u y y η, Reijo Kouhia, 25 35/44
36 Matriisimuodossa kirjoitettuna { u,ξ u,η } = [ x,ξ y,ξ x,η y,η ] { u,x u,y } eli u,ξ = J T u,x, missä J on geometriakuvauksen Jacobin matriisi. Monissa elementimenetelmää käsittelevissä kirjoissa kutsutaan J:n transpoosia parametrisen kuvauksen Jacobin matriisiksi. Tässä esityksessä noudatetaan kuitenkin yleisempää käytäntöä, missä kuvauksen x i = f i (y j ) Jacobin matriisi määritellään J ij = f i / y j. Jotta kuvaus olisi yksikäsitteinen, on Jacobin matriisin determinantin oltava nollasta eroava ja jotta kuvaus säilyttäisi suuntaisuutensa on sen oltava positiivinen, eli vaaditaan det J >. Reijo Kouhia, 25 36/44
37 3-D ELEMENTTITYYPPEJÄ tetraedri heksaedri pyramidi pentaedri taltta alasin Reijo Kouhia, 25 37/44
38 Lagrange ja Serendipity 8-solmuinen 27-solmuinen 64-solmuinen 8-solmuinen 2-solmuinen 32-solmuinen Reijo Kouhia, 25 38/44
39 Globaali tasapainoyhtälö Koko diskretoidun rakenteen tasapainoyhtälö voidaan kirjoittaa r = f missä sisäiset reaktiovoimat kootaan elementtisouuksista r (e) = B T σdv. Ω (e) Mikäli tehtävä on lineaarinen niin σ = Dɛ = DBq saadaan diskreeteiksi tasapainoyhtälöiksi lineaarinen algebrallinen yhtälösysteemi Kq = f missä K on koko rakenteen jäykkyysmatriisi ja q on ratkaistava siirtymävektori. Reijo Kouhia, 25 39/44
40 Epälineaarinen ongelma Geometrinen epälineaarisuus: B riippuu siirtymistä q Fysikaalinen eli materiaalin epälineaarisuus σ = D(q) Tasapainoyhtälön f(q) r(q) f ext (q) =. missä f on epätasapainovoima, r sisäiset voimat ja f ext ulkoiset kuormat, ratkaisu suoritetaan askeleittain iteratiivisesti Newtonin menetelmällä. Reijo Kouhia, 25 4/44
41 Newtonin menetelmä Linearisoidaan f(q i+ n ) f(q i n) + f (q i n)δq i n = missä f on Jacobiaanimatriisi f = f q = r q f ext q = K r K ext = K joka on tangenttijäykkyys tasapainotilassa. Newtonin iteraatiokaava on siten q i+ n = q i n [f (q i n)] f(q i n) = q i n + δq i n = q n + q i n + δq i n = q n + q i+ n, yläindeksi viittaa iteraatioon ja alaindeksi askeleeseen. Reijo Kouhia, 25 4/44
42 Kriittiset pisteet Tasapainopolun kriittisen pisteen määritys on epälineaarinen ominaisarvotehtävä, joka voidaan lausua seuraavasti: etsi siirtymätila q kr, kriittinen kuorma λ kr ja sitä vastaava ominaisvektori φ siten, että f (q kr, λ kr )φ = ja f(q kr, λ kr ) = (3) Reijo Kouhia, 25 42/44


43 Ratkaisun ongelmia Reijo Kouhia, 25 43/44
44 Kirjallisuutta K.-J. Bathe, E.L. Wilson, Numerical Methods in Finite Element Analysis, Prentice-Hall, 976 K.-J. Bathe, Finite Element Procedures in Engineering Analysis, Prentice-Hall, 982 I. Fried, Numerical Solution of Differential Equations, Academic Press, 979 T.J.R. Hughes, The Finite Element Method, Prentice-Hall, 987 O.C. Zienkiewicz, R.L. Taylor, The Finite Element Method jne. jne... Suomenkielistä M.K. Hakala, Lujuusopin elementtimenetelmä, Otatieto 457, 99 R. Kouhia, M. Tuomala, Rakenteiden mekaniikan numeeriset menetelmät, luentomoniste osoite verkossa Reijo Kouhia, 25 44/44
Luku 3 Johdatus elementtimenetelmään
 Luku 3 Johdatus elementtimenetelmään Luvun tarkoituksena on esitellä elementtimenetelmän perusosat ja tarkastella interpolaatiofunktioiden muodostamista yksidimensioisessa tapauksessa. Elementtimenetelmän
Luku 3 Johdatus elementtimenetelmään Luvun tarkoituksena on esitellä elementtimenetelmän perusosat ja tarkastella interpolaatiofunktioiden muodostamista yksidimensioisessa tapauksessa. Elementtimenetelmän
Luku 4 Elementtimenetelmä tasoalueessa
 Luku 4 Elementtimenetelmä tasoalueessa Elementtimenetelmän yleistys useampiulotteisiin tapauksiin on sangen suoraviivaista. Kaksidimensionaalisuus mahdollistaa erilaisia elementtigeometrioita, joista tässä
Luku 4 Elementtimenetelmä tasoalueessa Elementtimenetelmän yleistys useampiulotteisiin tapauksiin on sangen suoraviivaista. Kaksidimensionaalisuus mahdollistaa erilaisia elementtigeometrioita, joista tässä
Tampere University of Technology
 Tampere University of Technology EDE- Introduction to Finite Element Method. Exercise 3 Autumn 3.. Solve the deflection curve v(x) exactly for the beam shown y,v q v = q z, xxxx x E I z Integroidaan yhtälö
Tampere University of Technology EDE- Introduction to Finite Element Method. Exercise 3 Autumn 3.. Solve the deflection curve v(x) exactly for the beam shown y,v q v = q z, xxxx x E I z Integroidaan yhtälö
Exam III 10 Mar 2014 Solutions
 TTY/ Department o Mechanical Engineering and Industrial Systems TE III / EDE_ / S EDE- Finite Ement Method Exam III Mar Solutions. Compute the dection at right end o the y,v / F structure using the potential
TTY/ Department o Mechanical Engineering and Industrial Systems TE III / EDE_ / S EDE- Finite Ement Method Exam III Mar Solutions. Compute the dection at right end o the y,v / F structure using the potential
Värähdysliikkeet. q + f (q, q, t) = 0. q + f (q, q) = F (t) missä nopeusriippuvuus kuvaa vaimenemista ja F (t) on ulkoinen pakkovoima.
 = 0. q + f (q, q) = F (t) missä nopeusriippuvuus kuvaa vaimenemista ja F (t) on ulkoinen pakkovoima.") Torstai 18.9.2014 1/17 Värähdysliikkeet Värähdysliikkeet ovat tyypillisiä fysiikassa: Häiriö oskillaatio Jaksollinen liike oskillaatio Yleisesti värähdysliikettä voidaan kuvata yhtälöllä q + f (q, q, t)
Torstai 18.9.2014 1/17 Värähdysliikkeet Värähdysliikkeet ovat tyypillisiä fysiikassa: Häiriö oskillaatio Jaksollinen liike oskillaatio Yleisesti värähdysliikettä voidaan kuvata yhtälöllä q + f (q, q, t)
Numeeriset menetelmät TIEA381. Luento 6. Kirsi Valjus. Jyväskylän yliopisto. Luento 6 () Numeeriset menetelmät / 33
 Numeeriset menetelmät / 33") Numeeriset menetelmät TIEA381 Luento 6 Kirsi Valjus Jyväskylän yliopisto Luento 6 () Numeeriset menetelmät 4.4.2013 1 / 33 Luennon 6 sisältö Interpolointi ja approksimointi Polynomi-interpolaatio: Vandermonden
Numeeriset menetelmät TIEA381 Luento 6 Kirsi Valjus Jyväskylän yliopisto Luento 6 () Numeeriset menetelmät 4.4.2013 1 / 33 Luennon 6 sisältö Interpolointi ja approksimointi Polynomi-interpolaatio: Vandermonden
Numeerinen integrointi
 Numeerinen integrointi hum 8.0. Numeerinen integrointi Numeerisia integrointimenetelmiä on useita. Käsitellään tässä yhteydessä kuitenkin vain Gauss in integrointia, joka on elementtimenetelmän yhteydessä
Numeerinen integrointi hum 8.0. Numeerinen integrointi Numeerisia integrointimenetelmiä on useita. Käsitellään tässä yhteydessä kuitenkin vain Gauss in integrointia, joka on elementtimenetelmän yhteydessä
Rakenteiden mekaniikan menetelmiä metallirakentajille OSA 3 Elementtiverkon generointi ja tulosten
 Rakenteiden mekaniikan menetelmiä metallirakentajille OSA 3 Elementtiverkon generointi ja tulosten jälkikäsittely Reijo Kouhia TKK Rakenteiden mekaniikka s-posti: reijo.kouhia@tkk.fi URL:http://users.tkk.fi/
Rakenteiden mekaniikan menetelmiä metallirakentajille OSA 3 Elementtiverkon generointi ja tulosten jälkikäsittely Reijo Kouhia TKK Rakenteiden mekaniikka s-posti: reijo.kouhia@tkk.fi URL:http://users.tkk.fi/
Numeeriset menetelmät
 Numeeriset menetelmät Luento 6 To 22.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 6 To 22.9.2011 p. 1/38 p. 1/38 Ominaisarvotehtävät Monet sovellukset johtavat ominaisarvotehtäviin Yksi
Numeeriset menetelmät Luento 6 To 22.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 6 To 22.9.2011 p. 1/38 p. 1/38 Ominaisarvotehtävät Monet sovellukset johtavat ominaisarvotehtäviin Yksi
Numeeriset menetelmät TIEA381. Luento 5. Kirsi Valjus. Jyväskylän yliopisto. Luento 5 () Numeeriset menetelmät / 28
 Numeeriset menetelmät / 28") Numeeriset menetelmät TIEA381 Luento 5 Kirsi Valjus Jyväskylän yliopisto Luento 5 () Numeeriset menetelmät 3.4.2013 1 / 28 Luennon 5 sisältö Luku 4: Ominaisarvotehtävistä Potenssiinkorotusmenetelmä QR-menetelmä
Numeeriset menetelmät TIEA381 Luento 5 Kirsi Valjus Jyväskylän yliopisto Luento 5 () Numeeriset menetelmät 3.4.2013 1 / 28 Luennon 5 sisältö Luku 4: Ominaisarvotehtävistä Potenssiinkorotusmenetelmä QR-menetelmä
Numeeriset menetelmät TIEA381. Luento 8. Kirsi Valjus. Jyväskylän yliopisto. Luento 8 () Numeeriset menetelmät / 35
 Numeeriset menetelmät / 35") Numeeriset menetelmät TIEA381 Luento 8 Kirsi Valjus Jyväskylän yliopisto Luento 8 () Numeeriset menetelmät 11.4.2013 1 / 35 Luennon 8 sisältö Interpolointi ja approksimointi Funktion approksimointi Tasainen
Numeeriset menetelmät TIEA381 Luento 8 Kirsi Valjus Jyväskylän yliopisto Luento 8 () Numeeriset menetelmät 11.4.2013 1 / 35 Luennon 8 sisältö Interpolointi ja approksimointi Funktion approksimointi Tasainen
5 Differentiaaliyhtälöryhmät
 5 Differentiaaliyhtälöryhmät 5.1 Taustaa ja teoriaa Differentiaaliyhtälöryhmiä tarvitaan useissa sovelluksissa. Toinen motivaatio yhtälöryhmien käytölle: Korkeamman asteen differentiaaliyhtälöt y (n) =
5 Differentiaaliyhtälöryhmät 5.1 Taustaa ja teoriaa Differentiaaliyhtälöryhmiä tarvitaan useissa sovelluksissa. Toinen motivaatio yhtälöryhmien käytölle: Korkeamman asteen differentiaaliyhtälöt y (n) =
Teknillinen korkeakoulu Mat Epälineaarisen elementtimenetelmän perusteet (Mikkola/Ärölä) 11. harjoituksen ratkaisut
 11. harjoituksen ratkaisut") Tknillinn korkakoulu Mat-5.187 Epälinaarisn lmnttimntlmän prustt (Mikkola/Ärölä) 11. harjoituksn ratkaisut Tht. 1 Rfrnssitilan suurita käyttän (kokonais-lagrang) lausuttu hto krittisn aika-askln pituudll
Tknillinn korkakoulu Mat-5.187 Epälinaarisn lmnttimntlmän prustt (Mikkola/Ärölä) 11. harjoituksn ratkaisut Tht. 1 Rfrnssitilan suurita käyttän (kokonais-lagrang) lausuttu hto krittisn aika-askln pituudll
Q Q 3. [mm 2 ] 1 1 = L
![Q Q 3. [mm 2 ] 1 1 = L](/thumbs/93/111703390.jpg "Q Q 3. [mm 2 ] 1 1 = L") EDE-00 Elementtimenetelmän perusteet. Harjoitus 5r Syksy 03. 400 mm 0 kn 600 mm A 400 mm B 8 kn 300 mm 5 kn 000 mm 8 kn 300 mm 300 mm 00 mm. Määritä pisteiden A ja B siirtymät elementtimenetelmällä, kun
EDE-00 Elementtimenetelmän perusteet. Harjoitus 5r Syksy 03. 400 mm 0 kn 600 mm A 400 mm B 8 kn 300 mm 5 kn 000 mm 8 kn 300 mm 300 mm 00 mm. Määritä pisteiden A ja B siirtymät elementtimenetelmällä, kun
6. Differentiaaliyhtälösysteemien laadullista teoriaa.
 1 MAT-13450 LAAJA MATEMATIIKKA 5 Tampereen teknillinen yliopisto Risto Silvennoinen Kevät 2010 6. Differentiaaliyhtälösysteemien laadullista teoriaa. Olemme keskittyneet tässä kurssissa ensimmäisen kertaluvun
1 MAT-13450 LAAJA MATEMATIIKKA 5 Tampereen teknillinen yliopisto Risto Silvennoinen Kevät 2010 6. Differentiaaliyhtälösysteemien laadullista teoriaa. Olemme keskittyneet tässä kurssissa ensimmäisen kertaluvun
Kuva 1: Funktion f tasa-arvokäyriä. Ratkaisu. Suurin kasvunopeus on gradientin suuntaan. 6x 0,2
 HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi I, syksy 018 Harjoitus Ratkaisuehdotukset Tehtävä 1. Olkoon f : R R f(x 1, x ) = x 1 + x Olkoon C R. Määritä tasa-arvojoukko Sf(C) = {(x 1, x
HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi I, syksy 018 Harjoitus Ratkaisuehdotukset Tehtävä 1. Olkoon f : R R f(x 1, x ) = x 1 + x Olkoon C R. Määritä tasa-arvojoukko Sf(C) = {(x 1, x
y x1 σ t 1 = c y x 1 σ t 1 = y x 2 σ t 2 y x 2 x 1 y = σ(t 2 t 1 ) x 2 x 1 y t 2 t 1
 x 2 x 1 y t 2 t 1") 1. Tarkastellaan funktiota missä σ C ja y (y 1,..., y n ) R n. u : R n R C, u(x, t) e i(y x σt), (a) Miksi funktiota u(x, t) voidaan kutsua tasoaalloksi, jonka aaltorintama on kohtisuorassa vektorin y
1. Tarkastellaan funktiota missä σ C ja y (y 1,..., y n ) R n. u : R n R C, u(x, t) e i(y x σt), (a) Miksi funktiota u(x, t) voidaan kutsua tasoaalloksi, jonka aaltorintama on kohtisuorassa vektorin y
Teknillinen korkeakoulu Mat Epälineaarisen elementtimenetelmän perusteet (Mikkola/Ärölä) 12. harjoituksen ratkaisut
 12. harjoituksen ratkaisut") Teknillinen korkeakoulu Mat-5.87 Epälineaarisen elementtimenetelmän perusteet (Mikkola/Ärölä) 2. harjoituksen ratkaisut Teht. Kirjan esimerkissä on kaikissa matriiseissa diagonaalin ulkopuolisilla termeillä
Teknillinen korkeakoulu Mat-5.87 Epälineaarisen elementtimenetelmän perusteet (Mikkola/Ärölä) 2. harjoituksen ratkaisut Teht. Kirjan esimerkissä on kaikissa matriiseissa diagonaalin ulkopuolisilla termeillä
Osoita, että täsmälleen yksi vektoriavaruuden ehto ei ole voimassa.
 LINEAARIALGEBRA Harjoituksia 2016 1. Olkoon V = R 2 varustettuna tavallisella yhteenlaskulla. Määritellään reaaliluvulla kertominen seuraavasti: λ (x 1, x 2 ) = (λx 1, 0) (x 1, x 2 ) R 2 ja λ R. Osoita,
LINEAARIALGEBRA Harjoituksia 2016 1. Olkoon V = R 2 varustettuna tavallisella yhteenlaskulla. Määritellään reaaliluvulla kertominen seuraavasti: λ (x 1, x 2 ) = (λx 1, 0) (x 1, x 2 ) R 2 ja λ R. Osoita,
MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat.
 MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat. Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät 2016 1 Perustuu
MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat. Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät 2016 1 Perustuu
Tehtävä 4.7 Tarkastellaan hiukkasta, joka on pakotettu liikkumaan toruksen pinnalla.
 Tehtävä.7 Tarkastellaan hiukkasta, joka on pakotettu liikkumaan toruksen pinnalla. x = (a + b cos(θ)) cos(ψ) y = (a + b cos(θ)) sin(ψ) = b sin(θ), a > b, θ π, ψ π Figure. Toruksen hajoituskuva Oletetaan,
Tehtävä.7 Tarkastellaan hiukkasta, joka on pakotettu liikkumaan toruksen pinnalla. x = (a + b cos(θ)) cos(ψ) y = (a + b cos(θ)) sin(ψ) = b sin(θ), a > b, θ π, ψ π Figure. Toruksen hajoituskuva Oletetaan,
Numeeriset menetelmät
 Numeeriset menetelmät Luento 3 Ti 13.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 3 Ti 13.9.2011 p. 1/37 p. 1/37 Epälineaariset yhtälöt Newtonin menetelmä: x n+1 = x n f(x n) f (x n ) Sekanttimenetelmä:
Numeeriset menetelmät Luento 3 Ti 13.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 3 Ti 13.9.2011 p. 1/37 p. 1/37 Epälineaariset yhtälöt Newtonin menetelmä: x n+1 = x n f(x n) f (x n ) Sekanttimenetelmä:
Iteratiiviset ratkaisumenetelmät
 Iteratiiviset ratkaisumenetelmät Keijo Ruotsalainen Division of Mathematics Yleinen iteraatio Lineaarisen yhtälöryhmän iteratiivinen ratkaisumenetelmä voidaan esittää muodossa: Anna alkuarvaus: x 0 R n
Iteratiiviset ratkaisumenetelmät Keijo Ruotsalainen Division of Mathematics Yleinen iteraatio Lineaarisen yhtälöryhmän iteratiivinen ratkaisumenetelmä voidaan esittää muodossa: Anna alkuarvaus: x 0 R n
Ilkka Mellin Todennäköisyyslaskenta. Osa 2: Satunnaismuuttujat ja todennäköisyysjakaumat. Momenttiemäfunktio ja karakteristinen funktio
 Ilkka Mellin Todennäköisyyslaskenta Osa : Satunnaismuuttujat ja todennäköisyysjakaumat Momenttiemäfunktio ja karakteristinen funktio TKK (c) Ilkka Mellin (7) 1 Momenttiemäfunktio ja karakteristinen funktio
Ilkka Mellin Todennäköisyyslaskenta Osa : Satunnaismuuttujat ja todennäköisyysjakaumat Momenttiemäfunktio ja karakteristinen funktio TKK (c) Ilkka Mellin (7) 1 Momenttiemäfunktio ja karakteristinen funktio
[ k ] ja ekvivalenttisen solmukuormitusvektorin { r } määritystä kaavoista (4.20) ja
![[ k ] ja ekvivalenttisen solmukuormitusvektorin { r } määritystä kaavoista (4.20) ja](/thumbs/62/46829869.jpg "[ k ] ja ekvivalenttisen solmukuormitusvektorin { r } määritystä kaavoista (4.20) ja") Elementtimenetelmän perusteet 7. 7 D-SOLIDIRAKEEE 7. ohdanto Edellä tarkasteltiin interpolointia ja numeerista integrointia emoneliön ja emokolmion alueissa. Emoelementtien avulla voidaan muodostaa vaihtelevan
Elementtimenetelmän perusteet 7. 7 D-SOLIDIRAKEEE 7. ohdanto Edellä tarkasteltiin interpolointia ja numeerista integrointia emoneliön ja emokolmion alueissa. Emoelementtien avulla voidaan muodostaa vaihtelevan
Tällaisessa tapauksessa on usein luontevaa samaistaa (u,v)-taso (x,y)-tason kanssa, jolloin tason parametriesitys on *** VEKTORIANALYYSI.
-taso (x,y)-tason kanssa, jolloin tason parametriesitys on *** VEKTORIANALYYSI.") 39 VEKTORIANALYYI Luento 6 5. Pinnat ja pintaintegraalit Pintojen parametriesitys. Aikaisemmin käsittelimme käyrän esittämistä parametrimuodossa. iihen riitti yksi reaalinen parametri (t), joka sai aroja
39 VEKTORIANALYYI Luento 6 5. Pinnat ja pintaintegraalit Pintojen parametriesitys. Aikaisemmin käsittelimme käyrän esittämistä parametrimuodossa. iihen riitti yksi reaalinen parametri (t), joka sai aroja
(0 desimaalia, 2 merkitsevää numeroa).
.") NUMEERISET MENETELMÄT DEMOVASTAUKSET SYKSY 20.. (a) Absoluuttinen virhe: ε x x ˆx /7 0.4 /7 4/00 /700 0.004286. Suhteellinen virhe: ρ x x ˆx x /700 /7 /00 0.00 0.%. (b) Kahden desimaalin tarkkuus x ˆx
NUMEERISET MENETELMÄT DEMOVASTAUKSET SYKSY 20.. (a) Absoluuttinen virhe: ε x x ˆx /7 0.4 /7 4/00 /700 0.004286. Suhteellinen virhe: ρ x x ˆx x /700 /7 /00 0.00 0.%. (b) Kahden desimaalin tarkkuus x ˆx
(1.1) Ae j = a k,j e k.
 Ae j = a k,j e k.") Lineaarikuvauksen determinantti ja jälki 1. Lineaarikuvauksen matriisi. Palautetaan mieleen, mikä lineaarikuvauksen matriisi annetun kannan suhteen on. Olkoot V äärellisulotteinen vektoriavaruus, n = dim
Lineaarikuvauksen determinantti ja jälki 1. Lineaarikuvauksen matriisi. Palautetaan mieleen, mikä lineaarikuvauksen matriisi annetun kannan suhteen on. Olkoot V äärellisulotteinen vektoriavaruus, n = dim
Numeeriset menetelmät
 Numeeriset menetelmät Luento 12 To 13.10.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 12 To 13.10.2011 p. 1/38 p. 1/38 Tavalliset differentiaaliyhtälöt Yhtälöissä tuntematon funktio Tavalliset
Numeeriset menetelmät Luento 12 To 13.10.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 12 To 13.10.2011 p. 1/38 p. 1/38 Tavalliset differentiaaliyhtälöt Yhtälöissä tuntematon funktio Tavalliset
Harjoitus Tarkastellaan luentojen Esimerkin mukaista työttömyysmallinnusta. Merkitään. p(t) = hintaindeksi, π(t) = odotettu inflaatio,
 = hintaindeksi, π(t) = odotettu inflaatio,") Differentiaaliyhtälöt, Kesä 06 Harjoitus 3 Kaikissa tehtävissä, joissa pitää tarkastella kriittisten pisteiden stabiliteettia, jos kyseessä on satulapiste, ilmoita myös satulauraratkaisun (tai kriittisessä
Differentiaaliyhtälöt, Kesä 06 Harjoitus 3 Kaikissa tehtävissä, joissa pitää tarkastella kriittisten pisteiden stabiliteettia, jos kyseessä on satulapiste, ilmoita myös satulauraratkaisun (tai kriittisessä
1. Etsi seuraavien funktioiden kriittiset pisteet ja tutki niiden laatu: (a.) f(x,y) = 20x 2 +10xy +5y 2 (b.) f(x,y) = 4x 2 2y 2 xy +x+2y +100
 f(x,y) = 20x 2 +10xy +5y 2 (b.) f(x,y) = 4x 2 2y 2 xy +x+2y +100") HARJOITUS, RATKAISUEHDOTUKSET, YLE 07.. Etsi seuraavien funktioiden kriittiset pisteet ja tutki niiden laatu: (a.) f(x,y) = 0x +0xy +5y (b.) f(x,y) = 4x y xy +x+y +00 (a.) Funktion kriittiset pisteet ratkaisevat
HARJOITUS, RATKAISUEHDOTUKSET, YLE 07.. Etsi seuraavien funktioiden kriittiset pisteet ja tutki niiden laatu: (a.) f(x,y) = 0x +0xy +5y (b.) f(x,y) = 4x y xy +x+y +00 (a.) Funktion kriittiset pisteet ratkaisevat
Yhtälöryhmä matriisimuodossa. MS-A0004/A0006 Matriisilaskenta. Tarkastellaan esimerkkinä lineaarista yhtälöparia. 2x1 x 2 = 1 x 1 + x 2 = 5.
 2. MS-A4/A6 Matriisilaskenta 2. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 5.9.25 Tarkastellaan esimerkkinä lineaarista yhtälöparia { 2x x 2 = x + x 2
2. MS-A4/A6 Matriisilaskenta 2. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 5.9.25 Tarkastellaan esimerkkinä lineaarista yhtälöparia { 2x x 2 = x + x 2
12. Hessen matriisi. Ääriarvoteoriaa
 179 12. Hessen matriisi. Ääriarvoteoriaa Tarkastelemme tässä luvussa useamman muuttujan (eli vektorimuuttujan) n reaaliarvoisia unktioita : R R. Edellisessä luvussa todettiin, että riittävän säännöllisellä
179 12. Hessen matriisi. Ääriarvoteoriaa Tarkastelemme tässä luvussa useamman muuttujan (eli vektorimuuttujan) n reaaliarvoisia unktioita : R R. Edellisessä luvussa todettiin, että riittävän säännöllisellä
DYNAMIIKKA II, LUENTO 7 (SYKSY 2015) Arttu Polojärvi
 Arttu Polojärvi") DYNAMIIKKA II, LUENTO 7 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Liikemäärän ja liikemäärän momentin tase. Hyrräyhtälöt. Liikeyhtälöiden muodostaminen. Lagrangen formalismi:
DYNAMIIKKA II, LUENTO 7 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Liikemäärän ja liikemäärän momentin tase. Hyrräyhtälöt. Liikeyhtälöiden muodostaminen. Lagrangen formalismi:
Talousmatematiikan perusteet: Luento 13. Rajoittamaton optimointi Hessen matriisi Ominaisarvot ja vektorit Ääriarvon laadun tarkastelu
 Talousmatematiikan perusteet: Luento 13 Rajoittamaton optimointi Hessen matriisi Ominaisarvot ja vektorit Ääriarvon laadun tarkastelu Viime luennolla Aloimme tarkastella yleisiä, usean muuttujan funktioita
Talousmatematiikan perusteet: Luento 13 Rajoittamaton optimointi Hessen matriisi Ominaisarvot ja vektorit Ääriarvon laadun tarkastelu Viime luennolla Aloimme tarkastella yleisiä, usean muuttujan funktioita
a) on lokaali käänteisfunktio, b) ei ole. Piirrä näiden pisteiden ympäristöön asetetun neliöruudukon kuva. VASTAUS:
 on lokaali käänteisfunktio, b) ei ole. Piirrä näiden pisteiden ympäristöön asetetun neliöruudukon kuva. VASTAUS:") 6. Käänteiskuvaukset ja implisiittifunktiot 6.1. Käänteisfunktion olemassaolo 165. Määritä jokin piste, jonka ympäristössä funktiolla f : R 2 R 2, f (x,y) = (ysinx, x + y + 1) a) on lokaali käänteisfunktio,
6. Käänteiskuvaukset ja implisiittifunktiot 6.1. Käänteisfunktion olemassaolo 165. Määritä jokin piste, jonka ympäristössä funktiolla f : R 2 R 2, f (x,y) = (ysinx, x + y + 1) a) on lokaali käänteisfunktio,
4 Korkeamman kertaluvun differentiaaliyhtälöt
 Differentiaaliyhtälöt c Pekka Alestalo 2015 Tässä monisteessa käydään läpi tavallisiin differentiaaliyhtälöihin liittyviä peruskäsitteitä ja ratkaisuperiaatteita. Luennolla lasketaan esimerkkitehtäviä
Differentiaaliyhtälöt c Pekka Alestalo 2015 Tässä monisteessa käydään läpi tavallisiin differentiaaliyhtälöihin liittyviä peruskäsitteitä ja ratkaisuperiaatteita. Luennolla lasketaan esimerkkitehtäviä
Numeeriset menetelmät
 Numeeriset menetelmät Luento 7 Ti 27.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 7 Ti 27.9.2011 p. 1/39 p. 1/39 Interpolointi Ei tunneta funktion f : R R lauseketta, mutta tiedetään funktion
Numeeriset menetelmät Luento 7 Ti 27.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 7 Ti 27.9.2011 p. 1/39 p. 1/39 Interpolointi Ei tunneta funktion f : R R lauseketta, mutta tiedetään funktion
Numeeriset menetelmät TIEA381. Luento 7. Kirsi Valjus. Jyväskylän yliopisto. Luento 7 () Numeeriset menetelmät / 43
 Numeeriset menetelmät / 43") Numeeriset menetelmät TIEA381 Luento 7 Kirsi Valjus Jyväskylän yliopisto Luento 7 () Numeeriset menetelmät 10.4.2013 1 / 43 Luennon 7 sisältö Interpolointi ja approksimointi Interpolaatiovirheestä Paloittainen
Numeeriset menetelmät TIEA381 Luento 7 Kirsi Valjus Jyväskylän yliopisto Luento 7 () Numeeriset menetelmät 10.4.2013 1 / 43 Luennon 7 sisältö Interpolointi ja approksimointi Interpolaatiovirheestä Paloittainen
MS-A0207 Differentiaali- ja integraalilaskenta 2 (Chem) Tentti ja välikokeiden uusinta
 Tentti ja välikokeiden uusinta") MS-A0207 Differentiaali- ja integraalilaskenta 2 (Chem) Tentti ja välikokeiden uusinta 8..206 Gripenberg, Nieminen, Ojanen, Tiilikainen, Weckman Kirjoita jokaiseen koepaperiin nimesi, opiskelijanumerosi
MS-A0207 Differentiaali- ja integraalilaskenta 2 (Chem) Tentti ja välikokeiden uusinta 8..206 Gripenberg, Nieminen, Ojanen, Tiilikainen, Weckman Kirjoita jokaiseen koepaperiin nimesi, opiskelijanumerosi
e int) dt = 1 ( 2π 1 ) (0 ein0 ein2π
 dt = 1 ( 2π 1 ) (0 ein0 ein2π") Matematiikan ja tilastotieteen laitos Funktionaalianalyysin peruskurssi Kevät 9) Harjoitus 7 Ratkaisuja Jussi Martin). E Hilbert avaruus L [, π]) ja gt) := t, t [, π]. Määrää funktion g Fourier kertoimet
Matematiikan ja tilastotieteen laitos Funktionaalianalyysin peruskurssi Kevät 9) Harjoitus 7 Ratkaisuja Jussi Martin). E Hilbert avaruus L [, π]) ja gt) := t, t [, π]. Määrää funktion g Fourier kertoimet
Numeeriset Menetelmät
 Numeeriset Menetelmät Kurssilla käydään läpi laskennallisen matematiikan perusteet. Opitaan kuinka matematiikkaa oikeasti käytetään sekä millaisia perustehtäviä ratkaistaan numeerisesti. (Monimutkaisemmat
Numeeriset Menetelmät Kurssilla käydään läpi laskennallisen matematiikan perusteet. Opitaan kuinka matematiikkaa oikeasti käytetään sekä millaisia perustehtäviä ratkaistaan numeerisesti. (Monimutkaisemmat
Luku 7 Numeerinen integrointi
 Luku 7 Numeerinen integrointi Luvussa esitetään elementtimenetelmässä yleisimmin käytössä olevat kvadratuurit, eli numeeriset integrointikaavat. Kvadratuurit muodostetaan korvaamalla integroitava funktio
Luku 7 Numeerinen integrointi Luvussa esitetään elementtimenetelmässä yleisimmin käytössä olevat kvadratuurit, eli numeeriset integrointikaavat. Kvadratuurit muodostetaan korvaamalla integroitava funktio
Numeeriset menetelmät TIEA381. Luento 4. Kirsi Valjus. Jyväskylän yliopisto. Luento 4 () Numeeriset menetelmät / 44
 Numeeriset menetelmät / 44") Numeeriset menetelmät TIEA381 Luento 4 Kirsi Valjus Jyväskylän yliopisto Luento 4 () Numeeriset menetelmät 21.3.2013 1 / 44 Luennon 4 sisältö Lineaarisen yhtälöryhmän ratkaisemisesta: Choleskyn menetelmä
Numeeriset menetelmät TIEA381 Luento 4 Kirsi Valjus Jyväskylän yliopisto Luento 4 () Numeeriset menetelmät 21.3.2013 1 / 44 Luennon 4 sisältö Lineaarisen yhtälöryhmän ratkaisemisesta: Choleskyn menetelmä
MS-A0107 Differentiaali- ja integraalilaskenta 1 (CHEM)
") . Lasketaan valmiiksi derivaattoja ja niiden arvoja pisteessä x = 2: f(x) = x + 3x 3 + x 2 + 2x + 8, f(2) = 56, f (x) = x 3 + 9x 2 + 2x + 2, f (2) = 7, f (x) = 2x 2 + 8x + 2, f (2) = 86, f (3) (x) = 2x
. Lasketaan valmiiksi derivaattoja ja niiden arvoja pisteessä x = 2: f(x) = x + 3x 3 + x 2 + 2x + 8, f(2) = 56, f (x) = x 3 + 9x 2 + 2x + 2, f (2) = 7, f (x) = 2x 2 + 8x + 2, f (2) = 86, f (3) (x) = 2x
Yhtälöryhmä matriisimuodossa. MS-A0007 Matriisilaskenta. Tarkastellaan esimerkkinä lineaarista yhtälöparia. 2x1 x 2 = 1 x 1 + x 2 = 5.
 2. MS-A000 Matriisilaskenta 2. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2..205 Tarkastellaan esimerkkinä lineaarista yhtälöparia { 2x x 2 = x x 2 =
2. MS-A000 Matriisilaskenta 2. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2..205 Tarkastellaan esimerkkinä lineaarista yhtälöparia { 2x x 2 = x x 2 =
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 9: Muuttujanvaihto taso- ja avaruusintegraaleissa
 Luento 9: Muuttujanvaihto taso- ja avaruusintegraaleissa") MS-A24 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 9: Muuttujanvaihto taso- ja avaruusintegraaleissa Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 216 Antti Rasila
MS-A24 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 9: Muuttujanvaihto taso- ja avaruusintegraaleissa Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 216 Antti Rasila
Lectio Praecursoria: Epälokaali epälineaarinen potentiaaliteoria ja fraktionaaliset integraalioperaattorit
 : Epälokaali epälineaarinen potentiaaliteoria ja fraktionaaliset integraalioperaattorit Janne Korvenpää Matematiikan ja systeemianalyysin laitos Aalto-yliopiston perustieteiden korkeakoulu Lokaali ja lineaarinen:
: Epälokaali epälineaarinen potentiaaliteoria ja fraktionaaliset integraalioperaattorit Janne Korvenpää Matematiikan ja systeemianalyysin laitos Aalto-yliopiston perustieteiden korkeakoulu Lokaali ja lineaarinen:
2. harjoitus - malliratkaisut Tehtävä 3. Tasojännitystilassa olevan kappaleen kaksiakselista rasitustilaa käytetään usein materiaalimalleissa esiintyv
 2. harjoitus - malliratkaisut Tehtävä 3. Tasojännitystilassa olevan kappaleen kaksiakselista rasitustilaa käytetään usein materiaalimalleissa esiintyvien vakioiden määrittämiseen. Jännitystila on siten
2. harjoitus - malliratkaisut Tehtävä 3. Tasojännitystilassa olevan kappaleen kaksiakselista rasitustilaa käytetään usein materiaalimalleissa esiintyvien vakioiden määrittämiseen. Jännitystila on siten
1 Rajoittamaton optimointi
 Taloustieteen matemaattiset menetelmät 7 materiaali 5 Rajoittamaton optimointi Yhden muuttujan tapaus f R! R Muistutetaan mieleen maksimin määritelmä. Funktiolla f on maksimi pisteessä x jos kaikille y
Taloustieteen matemaattiset menetelmät 7 materiaali 5 Rajoittamaton optimointi Yhden muuttujan tapaus f R! R Muistutetaan mieleen maksimin määritelmä. Funktiolla f on maksimi pisteessä x jos kaikille y
Matematiikka B2 - TUDI
 Matematiikka B2 - TUDI Miika Tolonen 3. syyskuuta 2012 Miika Tolonen Matematiikka B2 - TUDI 1 Kurssin sisältö (1/2) Matriisit Laskutoimitukset Lineaariset yhtälöryhmät Gaussin eliminointi Lineaarinen riippumattomuus
Matematiikka B2 - TUDI Miika Tolonen 3. syyskuuta 2012 Miika Tolonen Matematiikka B2 - TUDI 1 Kurssin sisältö (1/2) Matriisit Laskutoimitukset Lineaariset yhtälöryhmät Gaussin eliminointi Lineaarinen riippumattomuus
infoa Viikon aiheet Potenssisarja a n = c n (x x 0 ) n < 1
 n < 1") infoa Viikon aiheet Tentti ensi viikolla ma 23.0. klo 9.00-3.00 Huomaa, alkaa tasalta! D0 (Sukunimet A-) E204 (Sukunimet S-Ö) Mukaan kynä ja kumi. Ei muuta materiaalia. Tentissä kaavakokoelma valmiina.
infoa Viikon aiheet Tentti ensi viikolla ma 23.0. klo 9.00-3.00 Huomaa, alkaa tasalta! D0 (Sukunimet A-) E204 (Sukunimet S-Ö) Mukaan kynä ja kumi. Ei muuta materiaalia. Tentissä kaavakokoelma valmiina.
Useita oskillaattoreita yleinen tarkastelu
 Useita oskillaattoreita yleinen tarkastelu Useita riippumattomia vapausasteita q i, i =,..., n ja potentiaali vastaavasti U(q, q 2,..., q n). Tasapainoasema {q 0, q0 2,..., q0 n} q 0 Käytetään merkintää
Useita oskillaattoreita yleinen tarkastelu Useita riippumattomia vapausasteita q i, i =,..., n ja potentiaali vastaavasti U(q, q 2,..., q n). Tasapainoasema {q 0, q0 2,..., q0 n} q 0 Käytetään merkintää
Muutama huomio momenttimenetelmän käytöstä kehärakenteiden analysoinnissa
 Rakenteiden Mekaniikka Vol. 42, Nro 2, 2009, s. 75 82 Muutama huomio momenttimenetelmän käytöstä kehärakenteiden analysoinnissa Reijo Kouhia Tiivistelmä. Momenttimenetelmä on käyttökelpoinen ratkaisutapa
Rakenteiden Mekaniikka Vol. 42, Nro 2, 2009, s. 75 82 Muutama huomio momenttimenetelmän käytöstä kehärakenteiden analysoinnissa Reijo Kouhia Tiivistelmä. Momenttimenetelmä on käyttökelpoinen ratkaisutapa
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt
 MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Matriisihajotelmat: Schur ja Jordan Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 18 R. Kangaslampi Matriisihajotelmat:
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Matriisihajotelmat: Schur ja Jordan Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 18 R. Kangaslampi Matriisihajotelmat:
Luento 8: Epälineaarinen optimointi
 Luento 8: Epälineaarinen optimointi Vektoriavaruus R n R n on kaikkien n-jonojen x := (x,..., x n ) joukko. Siis R n := Määritellään nollavektori = (,..., ). Reaalisten m n-matriisien joukkoa merkitään
Luento 8: Epälineaarinen optimointi Vektoriavaruus R n R n on kaikkien n-jonojen x := (x,..., x n ) joukko. Siis R n := Määritellään nollavektori = (,..., ). Reaalisten m n-matriisien joukkoa merkitään
2.2 Gaussin eliminaatio. 2.2 Gaussin eliminaatio. 2.2 Gaussin eliminaatio. 2.2 Gaussin eliminaatio
 x = x 2 = 5/2 x 3 = 2 eli Ratkaisu on siis x = (x x 2 x 3 ) = ( 5/2 2) (Tarkista sijoittamalla!) 5/2 2 Tämä piste on alkuperäisten tasojen ainoa leikkauspiste Se on myös piste/vektori jonka matriisi A
x = x 2 = 5/2 x 3 = 2 eli Ratkaisu on siis x = (x x 2 x 3 ) = ( 5/2 2) (Tarkista sijoittamalla!) 5/2 2 Tämä piste on alkuperäisten tasojen ainoa leikkauspiste Se on myös piste/vektori jonka matriisi A
MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 8: Newtonin iteraatio. Taso- ja avaruusintegraalit
 MS-A25/MS-A26 ifferentiaali- ja integraalilaskenta 2 Luento 8: Newtonin iteraatio. Taso- ja avaruusintegraalit Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät 216 1 Perustuu
MS-A25/MS-A26 ifferentiaali- ja integraalilaskenta 2 Luento 8: Newtonin iteraatio. Taso- ja avaruusintegraalit Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät 216 1 Perustuu
Talousmatematiikan perusteet: Luento 14. Rajoittamaton optimointi Hessen matriisi Ominaisarvot Ääriarvon laadun tarkastelu
 Talousmatematiikan perusteet: Luento 14 Rajoittamaton optimointi Hessen matriisi Ominaisarvot Ääriarvon laadun tarkastelu Luennolla 6 Tarkastelimme yhden muuttujan funktion f(x) rajoittamatonta optimointia
Talousmatematiikan perusteet: Luento 14 Rajoittamaton optimointi Hessen matriisi Ominaisarvot Ääriarvon laadun tarkastelu Luennolla 6 Tarkastelimme yhden muuttujan funktion f(x) rajoittamatonta optimointia
Numeeriset menetelmät TIEA381. Luento 11. Kirsi Valjus. Jyväskylän yliopisto. Luento 11 () Numeeriset menetelmät / 37
 Numeeriset menetelmät / 37") Numeeriset menetelmät TIEA381 Luento 11 Kirsi Valjus Jyväskylän yliopisto Luento 11 () Numeeriset menetelmät 24.4.2013 1 / 37 Luennon 11 sisältö Numeerisesta integroinnista ja derivoinnista Adaptiiviset
Numeeriset menetelmät TIEA381 Luento 11 Kirsi Valjus Jyväskylän yliopisto Luento 11 () Numeeriset menetelmät 24.4.2013 1 / 37 Luennon 11 sisältö Numeerisesta integroinnista ja derivoinnista Adaptiiviset
Kanta ja Kannan-vaihto
 ja Kannan-vaihto 1 Olkoon L vektoriavaruus. Äärellinen joukko L:n vektoreita V = { v 1, v 2,..., v n } on kanta, jos (1) Jokainen L:n vektori voidaan lausua v-vektoreiden lineaarikombinaationa. (Ts. Span(V
ja Kannan-vaihto 1 Olkoon L vektoriavaruus. Äärellinen joukko L:n vektoreita V = { v 1, v 2,..., v n } on kanta, jos (1) Jokainen L:n vektori voidaan lausua v-vektoreiden lineaarikombinaationa. (Ts. Span(V
Luku 5 Mekaniikan variaatioperiaatteita
 Luku 5 Mekaniikan variaatioperiaatteita Luvussa tarkastellaan virtuaalisien työn ja potentiaalienergian minimin periaatetta kiinteän aineen mekaniikassa. Näytetään, että virtuaalisen työn ja potentiaalienergian
Luku 5 Mekaniikan variaatioperiaatteita Luvussa tarkastellaan virtuaalisien työn ja potentiaalienergian minimin periaatetta kiinteän aineen mekaniikassa. Näytetään, että virtuaalisen työn ja potentiaalienergian
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 4: Ketjusäännöt ja lineaarinen approksimointi
 Luento 4: Ketjusäännöt ja lineaarinen approksimointi") MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 4: Ketjusäännöt ja lineaarinen approksimointi Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0202 Syksy 2015 1
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 4: Ketjusäännöt ja lineaarinen approksimointi Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0202 Syksy 2015 1
Numeeriset menetelmät TIEA381. Luento 12. Kirsi Valjus. Jyväskylän yliopisto. Luento 12 () Numeeriset menetelmät / 33
 Numeeriset menetelmät / 33") Numeeriset menetelmät TIEA381 Luento 12 Kirsi Valjus Jyväskylän yliopisto Luento 12 () Numeeriset menetelmät 25.4.2013 1 / 33 Luennon 2 sisältö Tavallisten differentiaaliyhtälöiden numeriikasta Rungen
Numeeriset menetelmät TIEA381 Luento 12 Kirsi Valjus Jyväskylän yliopisto Luento 12 () Numeeriset menetelmät 25.4.2013 1 / 33 Luennon 2 sisältö Tavallisten differentiaaliyhtälöiden numeriikasta Rungen
BM20A1501 Numeeriset menetelmät 1 - AIMO
 6. marraskuuta 2014 Opetusjärjestelyt Luennot + Harjoitukset pe 7.11.2014 10-14 2310, 14-17 7337 la 8.11.2014 9-12 2310, 12-16 7337 pe 14.11.2014 10-14 2310, 14-17 6216 la 15.11.2014 9-12 2310, 12-16 7337
6. marraskuuta 2014 Opetusjärjestelyt Luennot + Harjoitukset pe 7.11.2014 10-14 2310, 14-17 7337 la 8.11.2014 9-12 2310, 12-16 7337 pe 14.11.2014 10-14 2310, 14-17 6216 la 15.11.2014 9-12 2310, 12-16 7337
LUKU 7. Perusmuodot Ensimmäinen perusmuoto. Funktiot E, F ja G ovat tilkun ϕ ensimmäisen perusmuodon kertoimet ja neliömuoto
 LUKU 7 Perusmuodot 7 Ensimmäinen perusmuoto Määritelmä 7 Olkoon ϕ: U R 3 tilkku Määritellään funktiot E, F, G: U R asettamalla (7) E := ϕ ϕ, F := ϕ, G := ϕ u u u u Funktiot E, F G ovat tilkun ϕ ensimmäisen
LUKU 7 Perusmuodot 7 Ensimmäinen perusmuoto Määritelmä 7 Olkoon ϕ: U R 3 tilkku Määritellään funktiot E, F, G: U R asettamalla (7) E := ϕ ϕ, F := ϕ, G := ϕ u u u u Funktiot E, F G ovat tilkun ϕ ensimmäisen
Klassisen mekaniikan muotoilu symplektisen geometrian avulla
 Klassisen mekaniikan muotoilu symplektisen geometrian avulla Ville Kivioja 21. kesäkuuta 2017 Tämän lyhyen artikkelin tarkoituksena on muotoilla klassinen mekaniikka mahdollisimman yleisesti ja käyttäen
Klassisen mekaniikan muotoilu symplektisen geometrian avulla Ville Kivioja 21. kesäkuuta 2017 Tämän lyhyen artikkelin tarkoituksena on muotoilla klassinen mekaniikka mahdollisimman yleisesti ja käyttäen
= 2±i2 7. x 2 = 0, 1 x 2 = 0, 1+x 2 = 0.
 HARJOITUS 1, RATKAISUEHDOTUKSET, YLE11 2017. 1. Ratkaise (a.) 2x 2 16x 40 = 0 (b.) 4x 2 2x+2 = 0 (c.) x 2 (1 x 2 )(1+x 2 ) = 0 (d.) lnx a = b. (a.) Toisen asteen yhtälön ratkaisukaavalla: x = ( 16)± (
HARJOITUS 1, RATKAISUEHDOTUKSET, YLE11 2017. 1. Ratkaise (a.) 2x 2 16x 40 = 0 (b.) 4x 2 2x+2 = 0 (c.) x 2 (1 x 2 )(1+x 2 ) = 0 (d.) lnx a = b. (a.) Toisen asteen yhtälön ratkaisukaavalla: x = ( 16)± (
Inversio-ongelmien laskennallinen peruskurssi Luento 7 8
 Inversio-ongelmien laskennallinen peruskurssi Luento 7 8 Kevät 2011 1 Iteratiivisista menetelmistä Tähän mennessä on tarkasteltu niin sanottuja suoria menetelmiä, joissa (likimääräinen) ratkaisu saadaan
Inversio-ongelmien laskennallinen peruskurssi Luento 7 8 Kevät 2011 1 Iteratiivisista menetelmistä Tähän mennessä on tarkasteltu niin sanottuja suoria menetelmiä, joissa (likimääräinen) ratkaisu saadaan
1 Peruskäsitteet. Dierentiaaliyhtälöt
 Teknillinen korkeakoulu Matematiikka Dierentiaaliyhtälöt Alestalo Tässä monisteessa käydään läpi tavallisiin dierentiaaliyhtälöihin liittyviä peruskäsitteitä ja ratkaisuperiaatteita. Esimerkkejä luennoilla
Teknillinen korkeakoulu Matematiikka Dierentiaaliyhtälöt Alestalo Tässä monisteessa käydään läpi tavallisiin dierentiaaliyhtälöihin liittyviä peruskäsitteitä ja ratkaisuperiaatteita. Esimerkkejä luennoilla
6 Variaatiolaskennan perusteet
 6 Variaatiolaskennan perusteet Sivut ss. 22 26 pääosin lähteen [Kirk, Ch. 4, ss. 107 127] pohjalta Variaatiolaskenta keskittyy lokaaliin analyysiin eli funktion lokaalin minimin vastineisiin funktionaaleilla.
6 Variaatiolaskennan perusteet Sivut ss. 22 26 pääosin lähteen [Kirk, Ch. 4, ss. 107 127] pohjalta Variaatiolaskenta keskittyy lokaaliin analyysiin eli funktion lokaalin minimin vastineisiin funktionaaleilla.
Numeeriset menetelmät
 Numeeriset menetelmät Luento 5 Ti 20.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 5 Ti 20.9.2011 p. 1/40 p. 1/40 Choleskyn menetelmä Positiivisesti definiiteillä matriiseilla kolmiohajotelma
Numeeriset menetelmät Luento 5 Ti 20.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 5 Ti 20.9.2011 p. 1/40 p. 1/40 Choleskyn menetelmä Positiivisesti definiiteillä matriiseilla kolmiohajotelma
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat.
 Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat.") MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016 Antti Rasila
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016 Antti Rasila
Matematiikka B2 - Avoin yliopisto
 6. elokuuta 2012 Opetusjärjestelyt Luennot 9:15-11:30 Harjoitukset 12:30-15:00 Tentti Kurssin sisältö (1/2) Matriisit Laskutoimitukset Lineaariset yhtälöryhmät Gaussin eliminointi Lineaarinen riippumattomuus
6. elokuuta 2012 Opetusjärjestelyt Luennot 9:15-11:30 Harjoitukset 12:30-15:00 Tentti Kurssin sisältö (1/2) Matriisit Laskutoimitukset Lineaariset yhtälöryhmät Gaussin eliminointi Lineaarinen riippumattomuus
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 8: Divergenssi ja roottori. Gaussin divergenssilause.
 MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 8: Divergenssi ja roottori. Gaussin divergenssilause. Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2015
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 8: Divergenssi ja roottori. Gaussin divergenssilause. Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2015
2. Teoriaharjoitukset
 2. Teoriaharjoitukset Demotehtävät 2.1 Todista Gauss-Markovin lause. Ratkaisu. Oletetaan että luentokalvojen standardioletukset (i)-(v) ovat voimassa. Huomaa että Gauss-Markovin lause ei vaadi virhetermien
2. Teoriaharjoitukset Demotehtävät 2.1 Todista Gauss-Markovin lause. Ratkaisu. Oletetaan että luentokalvojen standardioletukset (i)-(v) ovat voimassa. Huomaa että Gauss-Markovin lause ei vaadi virhetermien
MS-A0207 Differentiaali- ja integraalilaskenta 2 (Chem) Yhteenveto, osa I
 Yhteenveto, osa I") MS-A0207 Differentiaali- ja integraalilaskenta 2 (Chem) Yhteenveto, osa I G. Gripenberg Aalto-yliopisto 21. tammikuuta 2016 G. Gripenberg (Aalto-yliopisto) MS-A0207 Differentiaali- ja integraalilaskenta
MS-A0207 Differentiaali- ja integraalilaskenta 2 (Chem) Yhteenveto, osa I G. Gripenberg Aalto-yliopisto 21. tammikuuta 2016 G. Gripenberg (Aalto-yliopisto) MS-A0207 Differentiaali- ja integraalilaskenta
Johdatus todennäköisyyslaskentaan Momenttiemäfunktio ja karakteristinen funktio. TKK (c) Ilkka Mellin (2005) 1
 Ilkka Mellin (2005) 1") Johdatus todennäköisyyslaskentaan Momenttiemäfunktio ja karakteristinen funktio TKK (c) Ilkka Mellin (5) 1 Momenttiemäfunktio ja karakteristinen funktio Momenttiemäfunktio Diskreettien jakaumien momenttiemäfunktioita
Johdatus todennäköisyyslaskentaan Momenttiemäfunktio ja karakteristinen funktio TKK (c) Ilkka Mellin (5) 1 Momenttiemäfunktio ja karakteristinen funktio Momenttiemäfunktio Diskreettien jakaumien momenttiemäfunktioita
Oletetaan ensin, että tangenttitaso on olemassa. Nyt pinnalla S on koordinaattiesitys ψ, jolle pätee että kaikilla x V U
 HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi II, syksy 018 Harjoitus 4 Ratkaisuehdotukset Tehtävä 1. Olkoon U R avoin joukko ja ϕ = (ϕ 1, ϕ, ϕ 3 ) : U R 3 kaksiulotteisen C 1 -alkeispinnan
HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi II, syksy 018 Harjoitus 4 Ratkaisuehdotukset Tehtävä 1. Olkoon U R avoin joukko ja ϕ = (ϕ 1, ϕ, ϕ 3 ) : U R 3 kaksiulotteisen C 1 -alkeispinnan
Differentiaali- ja integraalilaskenta 2 (CHEM) MS-A0207 Hakula/Vuojamo Kurssitentti, 12.2, 2018, arvosteluperusteet
 MS-A0207 Hakula/Vuojamo Kurssitentti, 12.2, 2018, arvosteluperusteet") ifferentiaali- ja integraalilaskenta 2 (CHEM) MS-A27 Hakula/Vuojamo Kurssitentti, 2.2, 28, arvosteluperusteet T Moniosaisten tehtävien osien painoarvo on sama ellei muuta ole erikseen osoitettu. Kokeessa
ifferentiaali- ja integraalilaskenta 2 (CHEM) MS-A27 Hakula/Vuojamo Kurssitentti, 2.2, 28, arvosteluperusteet T Moniosaisten tehtävien osien painoarvo on sama ellei muuta ole erikseen osoitettu. Kokeessa
Insinöörimatematiikka D
 Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi A. Lepistö alepisto@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2016 M. Hirvensalo V. Junnila A. Lepistö
Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi A. Lepistö alepisto@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2016 M. Hirvensalo V. Junnila A. Lepistö
Luento 8: Epälineaarinen optimointi
 Luento 8: Epälineaarinen optimointi Vektoriavaruus R n R n on kaikkien n-jonojen x := (x,..., x n ) joukko. Siis R n := Määritellään nollavektori 0 = (0,..., 0). Reaalisten m n-matriisien joukkoa merkitään
Luento 8: Epälineaarinen optimointi Vektoriavaruus R n R n on kaikkien n-jonojen x := (x,..., x n ) joukko. Siis R n := Määritellään nollavektori 0 = (0,..., 0). Reaalisten m n-matriisien joukkoa merkitään
17. Differentiaaliyhtälösysteemien laadullista teoriaa.
 99 17. Differentiaaliyhtälösysteemien laadullista teoriaa. Differentiaaliyhtälön x'(t) = f(x(t),t), x(t) n määrittelemän systeemin sanotaan olevan autonominen, jos oikea puoli ei eksplisiittisesti riipu
99 17. Differentiaaliyhtälösysteemien laadullista teoriaa. Differentiaaliyhtälön x'(t) = f(x(t),t), x(t) n määrittelemän systeemin sanotaan olevan autonominen, jos oikea puoli ei eksplisiittisesti riipu
5 OMINAISARVOT JA OMINAISVEKTORIT
 5 OMINAISARVOT JA OMINAISVEKTORIT Ominaisarvo-ongelma Käsitellään neliömatriiseja: olkoon A n n-matriisi. Luku on matriisin A ominaisarvo (eigenvalue), jos on olemassa vektori x siten, että Ax = x () Yhtälön
5 OMINAISARVOT JA OMINAISVEKTORIT Ominaisarvo-ongelma Käsitellään neliömatriiseja: olkoon A n n-matriisi. Luku on matriisin A ominaisarvo (eigenvalue), jos on olemassa vektori x siten, että Ax = x () Yhtälön
Insinöörimatematiikka D
 Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
Näihin harjoitustehtäviin liittyvä teoria löytyy Adamsista: Ad6, Ad5, 4: 12.8, ; Ad3: 13.8,
 TKK, Matematiikan laitos Gripenberg/Harhanen Mat-1.432 Matematiikan peruskurssi K2 Harjoitus 4, (A=alku-, L=loppuviikko, T= taulutehtävä, P= palautettava tehtävä, W= verkkotehtävä ) 12 16.2.2007, viikko
TKK, Matematiikan laitos Gripenberg/Harhanen Mat-1.432 Matematiikan peruskurssi K2 Harjoitus 4, (A=alku-, L=loppuviikko, T= taulutehtävä, P= palautettava tehtävä, W= verkkotehtävä ) 12 16.2.2007, viikko
Vektoriarvoiset funktiot Vektoriarvoisen funktion jatkuvuus ja derivoituvuus
 8. Vektoriarvoiset funktiot 8.1. Vektoriarvoisen funktion jatkuvuus ja derivoituvuus 320. Olkoon u reaalimuuttujan vektoriarvoinen funktio R R n ja lim t a u(t) = b. Todista: lim t a u(t) = b. 321. Olkoon
8. Vektoriarvoiset funktiot 8.1. Vektoriarvoisen funktion jatkuvuus ja derivoituvuus 320. Olkoon u reaalimuuttujan vektoriarvoinen funktio R R n ja lim t a u(t) = b. Todista: lim t a u(t) = b. 321. Olkoon
Mat Dynaaminen optimointi, mallivastaukset, kierros Vaimennetun heilurin tilanyhtälöt on esitetty luennolla: θ = g sin θ r θ
 Mat-48 Dynaaminen optimointi, mallivastaukset, kierros Vaimennetun heilurin tilanyhtälöt on esitetty luennolla: θ = g sin θ r θ L ẋ = x ẋ = g L sin x rx Epälineaarisen systeemin tasapainotiloja voidaan
Mat-48 Dynaaminen optimointi, mallivastaukset, kierros Vaimennetun heilurin tilanyhtälöt on esitetty luennolla: θ = g sin θ r θ L ẋ = x ẋ = g L sin x rx Epälineaarisen systeemin tasapainotiloja voidaan
ELEMENTTIMENETELMÄN PERUSTEET SESSIO 07: Aksiaalinen sauvaelementti, osa 2.
 7/ EEMENTTIMENETEMÄN PERSTEET SESSIO 7: Aksiaalinen sauvaelementti, osa. RATKAIS EEMENTIN AEESSA Verkon perusyhtälöstä [ K ]{ } = { F} saatavasta solmusiirtymävektorista { } voidaan poimia minkä tahansa
7/ EEMENTTIMENETEMÄN PERSTEET SESSIO 7: Aksiaalinen sauvaelementti, osa. RATKAIS EEMENTIN AEESSA Verkon perusyhtälöstä [ K ]{ } = { F} saatavasta solmusiirtymävektorista { } voidaan poimia minkä tahansa
Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos. MS-A0203 Differentiaali- ja integraalilaskenta 2, kevät 2016
 Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Malinen/Ojalammi MS-A0203 Differentiaali- ja integraalilaskenta 2, kevät 2016 Laskuharjoitus 5A Vastaukset alkuviikolla
Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Malinen/Ojalammi MS-A0203 Differentiaali- ja integraalilaskenta 2, kevät 2016 Laskuharjoitus 5A Vastaukset alkuviikolla
Antti Rasila. Kevät Matematiikan ja systeemianalyysin laitos Aalto-yliopisto. Antti Rasila (Aalto-yliopisto) MS-A0204 Kevät / 16
 MS-A0204 Kevät / 16") MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio. Antti Rasila Matematiikan ja systeemianalyysin laitos
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio. Antti Rasila Matematiikan ja systeemianalyysin laitos
Ominaisarvoon 4 liittyvät ominaisvektorit ovat yhtälön Ax = 4x eli yhtälöryhmän x 1 + 2x 2 + x 3 = 4x 1 3x 2 + x 3 = 4x 2 5x 2 x 3 = 4x 3.
 Matematiikan ja tilastotieteen laitos Lineaarialgebra ja matriisilaskenta II Ylimääräinen harjoitus 6 Ratkaisut A:n karakteristinen funktio p A on λ p A (λ) det(a λi ) 0 λ ( λ) 0 5 λ λ 5 λ ( λ) (( λ) (
Matematiikan ja tilastotieteen laitos Lineaarialgebra ja matriisilaskenta II Ylimääräinen harjoitus 6 Ratkaisut A:n karakteristinen funktio p A on λ p A (λ) det(a λi ) 0 λ ( λ) 0 5 λ λ 5 λ ( λ) (( λ) (
Määritelmä Olkoon T i L (V i, W i ), 1 i m. Yksikäsitteisen lineaarikuvauksen h L (V 1 V 2 V m, W 1 W 2 W m )
, 1 i m. Yksikäsitteisen lineaarikuvauksen h L (V 1 V 2 V m, W 1 W 2 W m )") Määritelmä 519 Olkoon T i L V i, W i, 1 i m Yksikäsitteisen lineaarikuvauksen h L V 1 V 2 V m, W 1 W 2 W m h v 1 v 2 v m T 1 v 1 T 2 v 2 T m v m 514 sanotaan olevan kuvausten T 1,, T m indusoima ja sitä
Määritelmä 519 Olkoon T i L V i, W i, 1 i m Yksikäsitteisen lineaarikuvauksen h L V 1 V 2 V m, W 1 W 2 W m h v 1 v 2 v m T 1 v 1 T 2 v 2 T m v m 514 sanotaan olevan kuvausten T 1,, T m indusoima ja sitä
MS-A0107 Differentiaali- ja integraalilaskenta 1 (CHEM)
") MS-A17 Differentiaali- ja integraalilaskenta 1 CHEM) Laskuharjoitus 4lv, kevät 16 1. Tehtävä: Laske cos x dx a) osittaisintegroinnilla, b) soveltamalla sopivaa trigonometrian kaavaa. Ratkaisu: a) Osittaisintegroinnin
MS-A17 Differentiaali- ja integraalilaskenta 1 CHEM) Laskuharjoitus 4lv, kevät 16 1. Tehtävä: Laske cos x dx a) osittaisintegroinnilla, b) soveltamalla sopivaa trigonometrian kaavaa. Ratkaisu: a) Osittaisintegroinnin
f[x i ] = f i, f[x i,..., x j ] = f[x i+1,..., x j ] f[x i,..., x j 1 ] x j x i T n+1 (x) = 2xT n (x) T n 1 (x), T 0 (x) = 1, T 1 (x) = x.
![f[x i ] = f i, f[x i,..., x j ] = f[x i+1,..., x j ] f[x i,..., x j 1 ] x j x i T n+1 (x) = 2xT n (x) T n 1 (x), T 0 (x) = 1, T 1 (x) = x.](/thumbs/64/52007594.jpg "f[x i ] = f i, f[x i,..., x j ] = f[x i+1,..., x j ] f[x i,..., x j 1 ] x j x i T n+1 (x) = 2xT n (x) T n 1 (x), T 0 (x) = 1, T 1 (x) = x.") Kaavakokoelma f[x i ] = f i, f[x i,..., x j ] = f[x i+,..., x j ] f[x i,..., x j ] x j x i T n+ (x) = 2xT n (x) T n (x), T (x) =, T (x) = x. n I,n = h f(t i + h 2 ), E,n = h2 (b a) f (2) (ξ). 24 i= I,n
Kaavakokoelma f[x i ] = f i, f[x i,..., x j ] = f[x i+,..., x j ] f[x i,..., x j ] x j x i T n+ (x) = 2xT n (x) T n (x), T (x) =, T (x) = x. n I,n = h f(t i + h 2 ), E,n = h2 (b a) f (2) (ξ). 24 i= I,n
Funktioiden approksimointi ja interpolointi
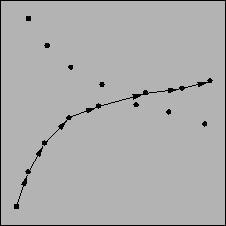
 Funktioiden approksimointi ja interpolointi Keijo Ruotsalainen Division of Mathematics interpolaatio-ongelma 8 Eksponenttifunktion exp(x) interpolointi 3.5 Funktion e^{0.25x} \sin(x) interpolointi 7 3
Funktioiden approksimointi ja interpolointi Keijo Ruotsalainen Division of Mathematics interpolaatio-ongelma 8 Eksponenttifunktion exp(x) interpolointi 3.5 Funktion e^{0.25x} \sin(x) interpolointi 7 3
Lineaarinen toisen kertaluvun yhtälö
 Lineaarinen toisen kertaluvun yhtälö Keijo Ruotsalainen Mathematics Division Lineaarinen toisen kertaluvun differentiaaliyhtälö Toisen kertaluvun täydellinen lineaarinen yhtälö muotoa p 2 (x)y + p 1 (x)y
Lineaarinen toisen kertaluvun yhtälö Keijo Ruotsalainen Mathematics Division Lineaarinen toisen kertaluvun differentiaaliyhtälö Toisen kertaluvun täydellinen lineaarinen yhtälö muotoa p 2 (x)y + p 1 (x)y
k=0 saanto jokaisen kolmannen asteen polynomin. Tukipisteet on talloin valittu
 LIS AYKSI A kirjaan Reaalimuuttujan analyysi 1.6. Numeerinen integrointi: Gaussin kaavat Edella kasitellyt numeerisen integroinnin kaavat eli kvadratuurikaavat Riemannin summa, puolisuunnikassaanto ja
LIS AYKSI A kirjaan Reaalimuuttujan analyysi 1.6. Numeerinen integrointi: Gaussin kaavat Edella kasitellyt numeerisen integroinnin kaavat eli kvadratuurikaavat Riemannin summa, puolisuunnikassaanto ja
y + 4y = 0 (1) λ = 0
 λ = 0") Matematiikan ja tilastotieteen osasto/hy Differentiaaliyhtälöt I Laskuharjoitus 6 mallit Kevät 2019 Tehtävä 1. Ratkaise yhtälöt a) y + 4y = x 2, b) y + 4y = 3e x. Ratkaisu: a) Differentiaaliyhtälön yleinen
Matematiikan ja tilastotieteen osasto/hy Differentiaaliyhtälöt I Laskuharjoitus 6 mallit Kevät 2019 Tehtävä 1. Ratkaise yhtälöt a) y + 4y = x 2, b) y + 4y = 3e x. Ratkaisu: a) Differentiaaliyhtälön yleinen
13. Taylorin polynomi; funktioiden approksimoinnista. Muodosta viidennen asteen Taylorin polynomi kehityskeskuksena origo funktiolle
 13. Taylorin polynomi; funktioiden approksimoinnista 13.1. Taylorin polynomi 552. Muodosta funktion f (x) = x 4 + 3x 3 + x 2 + 2x + 8 kaikki Taylorin polynomit T k (x, 2), k = 0,1,2,... (jolloin siis potenssien
13. Taylorin polynomi; funktioiden approksimoinnista 13.1. Taylorin polynomi 552. Muodosta funktion f (x) = x 4 + 3x 3 + x 2 + 2x + 8 kaikki Taylorin polynomit T k (x, 2), k = 0,1,2,... (jolloin siis potenssien