Mittausten suunnittelu I
|
|
|
- Markku Ranta
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
1 Mittausten suunnittelu I
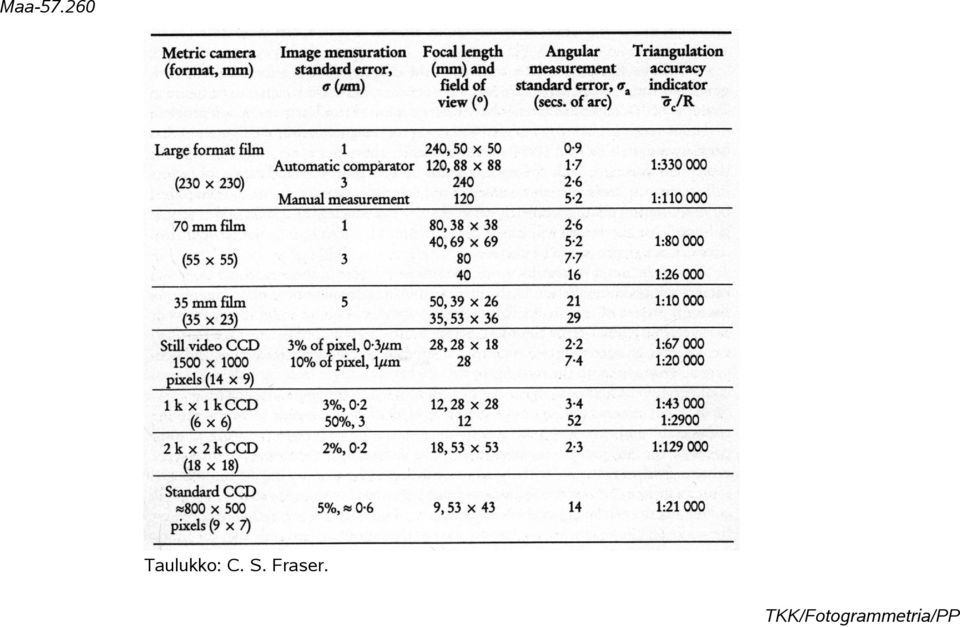
2 Eteenpäinleikkaukseen perustuvan mittauksen tarkkuus riippuu kahdesta asiasta (C.S. Fraser, 1996): 1) kuvaus-/tähtäyssäteen määritystarkkuudesta 2) kuvausgeometriasta
: 1) kuvaus-/tähtäyssäteen")
3 Saavutettavaa tarkkuutta voidaan arvioida seuraavan kaavan avulla: c = q q d q s = = d a k k c k c kohdekoordinaatin keskivirhe s a mittakaavaluku kuvakoordinaatin keskivirhe kulmamittauksen keskivirhe q kuvausgeometriasta riippuva kerroin vahvalle geometrialle, 1.5 heikohkolle jne. kohteen keskimääräinen etäisyys kamerasta kameran polttoväli kuvien lukumäärä per kamera asema d c k

4 Taulukko: C. S. Fraser.
5 Suunnittelun reunaehdot: 1) Kuvamittakaava -- eteenpäinleikkauksen tarkkuus on suoraan verrannollinen kuvamittakaavaan (polttovälin suhde kohteen ja kameran väliseen etäisyyteen) -- tavoiteltaessa tiettyä tarkkuutta voidaan kameran maksimietäisyyttä kohteesta arvioida seuraavan kaavan avulla: c c k d max = q 2) Erotuskyky (resoluutio) -- erotuskyvyn pitää olla riittävä jotta kuvakoordinaattien mittaus on mahdollista halutulla tarkkuudella -- myös mitattavien kohteiden (tähysten tai muiden yksityiskohtien) on oltava kooltaan sopivia
")
6 Suunnittelun reunaehdot: 3) Tila -- jos kuvaamiseen käytettävä tila on hyvin rajallinen, voidaan joutua turvautumaan laajakulmaisempaan optiikkaan ja kamera-asemien lisäämiseen 4) Kameran syvyysterävyysalue -- tärkeä eteenkin ei-tasomaisissa kappaleissa -- kameran aukkoa pienentämällä saadaan lisää syvyysterävyyttä, mutta tällöin joudutaan pidentämään valotusaikaa tai lisäämään valaistusta 5) Tähtäyskulma (incidence angle) -- esim. ristinmuotoisten tähysten keskipisteen määrittäminen saattaa olla vaikeaa, jos ne on kuvattu hyvin viistosta kulmasta
 -- esim.")
7 Suunnittelun reunaehdot: 6) Pisteiden määrä ja jakauma kuvilla -- sitä parempi mitä enemmän pisteitä ja mitä tasaisemmin ne ovat jakautuneet koko kuvan alueelle -- tasainen jakautuminen on erityisen tärkeää, jos kameran kalibrointiparametrit määritetään kuvauksen yhteydessä (itsekalibrointi) 7) Kuvasäteiden leikkauskulma -- optimaalinen n. 110 ± 30 8) Kameran avauskulma -- vaikuttaa kuvausetäisyyteen ja kuvien lukumäärään -- mittaus on sitä taloudellisempaa mitä suurempi osa kaikista pisteistä yksittäisillä kuvilla näkyy 9) Näkyvyys -- katveet Kuva: C. S. Fraser.
 Kameran avauskulma -- vaikuttaa kuvausetäisyyteen ja kuvien lukumäärään -- mittaus on sitä taloudellisempaa mitä suurempi osa")
8 Suunnittelun vaiheet: E. Grafarend on jakanut geodeettisten verkkojen suunnittelun neljään vaiheeseen: - zero-order design (ZOD) -- datum - first-order design (FOD) -- konfiguraatio - second-order design (SOD) -- painotus - third-order design (TOD) -- tihennys Samaa jakoa on ryhdytty käyttämään myös fotogrammetriassa. Tosin TOD ei ole lähifotogrammetriassa kovinkaan oleellinen, ja sekä ZOD että SOD ovat myös huomattavasti yksinkertaisempia kuin geodeettisissa verkoissa.

9 - yleensä mittauksessa on tärkeintä, että mitattujen pisteiden tarkkuus on mahdollisimman hyvä - estimaatit pisteiden tarkkuuksille saadaan muodostamalla ratkaistuille parametreille kovarianssimatriisi: T 1 C x= 0 A P A = C 1 C 12 C 21 C 2 - yllä olevassa yhtälössä C1 sisältää ulkoisen orientoinnin ja kameran parametrien varianssit ja C2 mitattujen pisteiden varianssit - mittausten suunnittelulla pyritään siis saamaan C2 halutunlaiseksi

10 ZOD (datumin valinta): -- 3D-pisteistöä voidaan siirtää, kiertää ja skaalata 7-parametrisella muunnoksella ilman, että sen muoto muuttuu -- nämä siirrot, kierrot ja mittakaava määrittävät pisteistön datumin -- ZOD tulee kysymykseen vain siinä tapauksessa, että datum on määritetty minimiehdoin (esim. kiinnitetään kaksi pistettä (X, Y ja Z) ja yksi korkeus) -- se seikka, mitkä pisteet on kiinnitetty vaikuttaa A-matriisiin, jolloin myös kovarianssimatriisi Cx muuttuu -- ZOD tähtää sellaiseen datumiin, missä Cx on halutunlainen (esim. niin, että tarkkuus on tietyissä pisteissä mahdollisimman hyvä tai että tarkkuus on mahdollisimman homogeeninen kaikissa pisteissä)

11 (esimerkki): - antenni (D=10m) - 6 (filmi)kameraa - kuvakoko 23cm x 23cm - hyvä kuvausgeometria - kaikki pisteet näkyvissä kaikille kameroille - kuvamittauksen keskivirheeksi oletettu 1.5 m Kuva: C. S. Fraser.

12 Vasemmassa sarakkeessa kahdesta ensimmäisestä pisteestä on kiinnitetty X, Y ja Z, ja kolmannesta Z. Kuva ja taulukko: C. S. Fraser.

13 Johtopäätökset: - optimaalinen tulos saadaan, kun kolmen kiinnitetyn pisteen (2*(XYZ)+Z) muodostaman kolmion keskipiste on pistejoukon keskipisteessä, kolmion pinta-ala on mahdollisimman suuri ja kun kahden XYZ-koordinaateiltaan kiinnitetyn pisteen välimatka on mahdollisimman suuri - datumin muuttaminen aiheuttaa myös vaihtelua varianssien homogeenisuuteen (paras tulos vapaan verkon tapauksessa) -- varianssit pienimpiä kiinnitettyjen pisteiden lähellä ja suurimpia pisteissä jotka ovat niistä kauimpana
 -- varianssit pienimpiä kiinnitettyjen pisteiden lähellä ja suurimpia pisteissä jotka ovat niistä")
14 FOD (konfiguraatio): 1) Kuvausgeometria -- ohessa on esitetty eri konvergenssikulmien ja kamera-asemien lukumäärän vaikutus saavutettavaan tarkkuuteen Kuvat: C. S. Fraser.

15 2) Kantasuhde -- kannan kasvattaminen parantaa syvyyssunnassa saavutettavaa tarkkuutta edullisemman leikkauskulman ansiosta 3) Kamera-asemien lukumäärä -- kamera-asemien lisääminen parantaa tarkkuutta ja luotettavuutta -- vaikuttaa kuvausgeometrian suunnitteluun -- jos käytössä on m kameraa, on saavutettava tarkkuus m1/2 parempi kuin kahta kameraa käyttämällä 4) Kuvien lukumäärä / kamera-asema -- tärkeä videokameroita käytettäessä (satunnaisten kuvavirheiden kompensointi)
 Kuvien lukumäärä / kamera-asema -- tärkeä videokameroita käytettäessä (satunnaisten kuvavirheiden")
16 5) Pisteiden lukumäärä ja jakauma -- kts. suunnittelun reunaehdot 6) Kuvamittakaava ja polttoväli -- kuvamittakaavan ja mitattujen pisteiden tarkkuuden välillä on lineaarinen riippuvuus -- kts. suunnittelun reunaehdot 7) Kalibrointiparametrit -- yliparametrisointia varottava -- vankka geometria ja riittävä määrä pisteitä auttavat erottamaan tilastollisesti merkittävät ja merkityksettömät parametrit
 Kalibrointiparametrit -- yliparametrisointia varottava -- vankka")
17 SOD (painotus): Fotogrammetrisissa mittauksissa kuvahavainnoilla on yleensä sama paino: P= I 2 Painoyksikön keskivirheeseen (kuvamittauksen tarkkuuteen) voi vaikuttaa: -- tähysten valinnalla -- lisäämällä kuvien lukumäärää / kuva-asema (keskiarvoistus) -- resoluution lisäämisellä -- filmimittauksissa käyttämällä tarkempaa komparaattoria -- jne. TOD (tihennys): Fotogrammetrisissa mittauksissa TOD voidaan katsoa olevan osa FOD:ia.

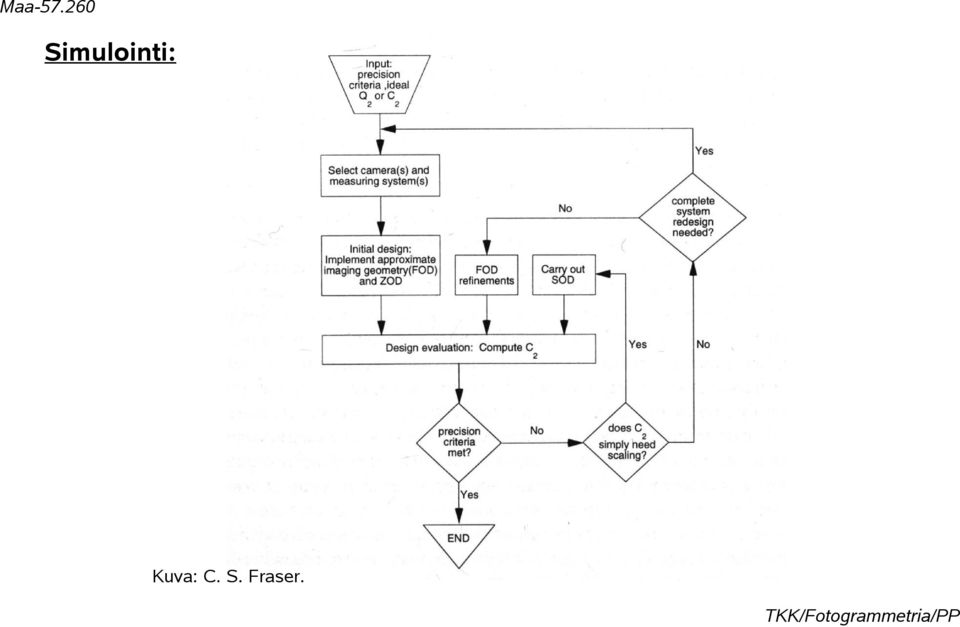
18 Simulointi: Kuva: C. S. Fraser.
19 Tähysten valinta: A) Muoto Pyöreä tähys soveltuu automaattiseen mittaamiseen paremmin kuin esim. ristin muotoinen. B) Koko - vain muutaman pikselin kokoisen tähyksen keskipisteen paikka on hankala määrittää - liian suurta tähystä vääristävät piirtovirheet

20 C) Materiaali ja väri - hyviä vaihtoehtoja ovat mattapintaiset tai heijastavapintaiset tähykset - kiiltäväpintaisia tulee välttää - tähyksen erottamiseksi taustasta voi olla hyvä käyttää sopivan väristä taustalevyä - väriyhdistelmistä esim. musta ja valkoinen tai musta ja keltainen ovat hyviä - heijastavia tähyksiä käytettäessä on varottava ylivalottumista Liian voimakas valo aiheuttaa heijastavien tähysten ylivalottumisen.

21 D) Nimikointi - numero tai muu koodaus Kuva: F. A. van den Heuvel et al. Kuva: S. Hattori et al. Kuva: R. Goudard et al. Kuva: S. Hattori et al.
22 Pisteen numero: 20+23=9
23 E) Laserpiste - kätevä tapa osoittaa suuri määrä pisteitä kohteen pinnasta - laserpisteen muoto on riippuvainen pinnanmuodosta - häilyntä (speckle) tekee pisteestä epähomogeenisen
24 Kynnystys: - kynnystys vaikuttaa tähyksen keskipisteen sijaintiin Vasemmanpuoleisessa kuvassa kynnysarvo on 40 ja oikeanpuoleisessa 85.
25 Vasemmanpuoleisessa kuvassa kynnysarvo on 140 ja oikeanpuoleisessa 185.
26 Pisteen keskikohdan x- ja y-koordinaatin muuttuminen kynnysarvon funktiona.
27 Keskipisteen liike kynnysarvoa muutettaessa. Oikea arvo lienee oikeassa alakulmassa.
28 Valaistuksen säätö: - alivalottuneista kuvista tulee kohinaisia - suurempi aukko pienentää syvyysterävyysaluetta - pitkä valotusaika vaatii vakaan kameran - heijastavia tähyksiä käytettäessä voidaan tausta häivyttää alivalottamalla kuva (tähykset kuitenkin näkyvät kirkkaina) Oikeanpuoleinen kuva on selvästi alivalottunut ja siitä johtuen kohinainen.
29 Tiivistys: - jos käytetään tiivistysmenetelmiä, joissa kuva ei säily täysin alkuperäisen kaltaisena (esim. jpeg), on liiallista tiivistämistä syytä välttää Vasemmanpuoleisen kuvan tiivistyssuhde on 1:4 ja oikeanpuoleisen 1:80.
30 Orientointiparametrien likiarvojen hankinta: - kameroiden likimääräiset paikat voidaan määrittää esim. takymetrillä - yleensä kuitenkin käytetään tunnettuja pisteitä (joko likimääräisiä tai tarkkoja) ja esim. DLT:tä orientointien ratkaisuun - jos kuvausgeometria on hyvä, riittää kun projektiokeskusten likiarvosijainnit ovat kohteen oikealla puolella ja kierrot ovat n. 45 asteen tarkkuudella oikeat Kuva: S. Hattori et al. Kuva:
31 Kohteen näkyvöitys: - piste, pisteistö, viivasto, ruudusto, muu tekstuuri - läpinäkyvät kohteet hankalia -- esim. tuulilasin sisään jäävä piimaakerros saadaan näkyviin tietyllä valon aallonpituudella
32 Lähteet: C. S. Fraser: Network design, Close-Range Photogrammetry and Machine Vision, K. B. Atkinson (Ed), Whittles Publishing, 1996, pp C. S. Fraser: Optimization of Networks in Non-Topographic Photogrammetry, NonTopographic Photogrammetry, H. M. Karara (Ed.), Second Edition, ASPRS, 1989, pp C. S. Fraser: Network Design Consideration for Non-Topographic Photogrammetry, Photogrammetric Engineering and Remote Sensing, Vol. 50, No. 8, August 1984, pp F. A. van den Heuvel, R. J. G. A. Kroon, R. S. Le Poole: Digital Close-Range Photogrammetry Using Artificial Targets, 17th ISPRS Congress, Proceedings, Commission V, Washington, USA. R. Goudard, C. Lasseur, D. Mergelkuhl: Digital Photogrammetry Applied to Large Physics Detectors, Surveying in Industry and Construction, WorkingWeek 2003, Paris, France. S. Hattori, K. Akimoto, C. Fraser, H. Imoto: Automated Procedures with Coded Targets in Industrial Vision Metrology, Photogrammetric Engineering and Remote Sensing, Vol. 68, No. 5, May 2002.
Luento 6 Mittausten suunnittelu II. erikoissovellukset
 Luento 6 Mittausten suunnittelu II 1 Aiheita Mittausongelman määrittely Tarkkuusluvut Suhteellinen tarkkuusluku Suhteellinen tarkkuus Tarkkuuden arvioiminen Kuvahavainnon keskivirhe Verkon rakennevakio
Luento 6 Mittausten suunnittelu II 1 Aiheita Mittausongelman määrittely Tarkkuusluvut Suhteellinen tarkkuusluku Suhteellinen tarkkuus Tarkkuuden arvioiminen Kuvahavainnon keskivirhe Verkon rakennevakio
Maa-57.260. Kameran kalibrointi. TKK/Fotogrammetria/PP
 Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Luento 6: 3-D koordinaatit
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Teoreettisia perusteita II
 Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Luento 4 Georeferointi
 Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 7: Fotogrammetrinen mittausprosessi
 7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
Luento 4 Georeferointi Maa Fotogrammetrian perusteet 1
 Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 5: Stereoskooppinen mittaaminen
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Luento 7 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Fotogrammetrian termistöä
 Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry)
") Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
Luento 2 Stereokuvan laskeminen. 2008 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento Fotogrammetrian perusteet. Henrik Haggrén
 Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 7: Kuvan ulkoinen orientointi
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Luento 6 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6: Stereo- ja jonomallin muodostaminen
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Luento 9 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
TTY Mittausten koekenttä. Käyttö. Sijainti
 TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
Luento 8: Kolmiointi AIHEITA. Kolmiointi. Maa-57.301 Fotogrammetrian yleiskurssi. Luento-ohjelma 1 2 3 4 5 6 7 8 9 10
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 4: Kiertomatriisi
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit
 JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit Versio: 1.0 Julkaistu: 6.9.2019 Voimassaoloaika: toistaiseksi 1 FIN2005N00 1.1 Mallin luonti ja tarkkuus FIN2005N00 on korkeusmuunnospinta,
JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit Versio: 1.0 Julkaistu: 6.9.2019 Voimassaoloaika: toistaiseksi 1 FIN2005N00 1.1 Mallin luonti ja tarkkuus FIN2005N00 on korkeusmuunnospinta,
Suorakulmainen kolmio
 Suorakulmainen kolmio 1. Määritä terävä kulma α, β ja γ, kun sinα = 0,5782, cos β = 0,745 ja tanγ = 1,222. π 2. Määritä trigonometristen funktioiden sini, kosini ja tangentti, kun kulma α = ja 3 β = 73,2
Suorakulmainen kolmio 1. Määritä terävä kulma α, β ja γ, kun sinα = 0,5782, cos β = 0,745 ja tanγ = 1,222. π 2. Määritä trigonometristen funktioiden sini, kosini ja tangentti, kun kulma α = ja 3 β = 73,2
Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
JUHTA - Julkisen hallinnon tietohallinnon neuvottelukunta
 JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 6: EUREF-FIN:n ja KKJ:n välinen kolmiulotteinen yhdenmuotoisuusmuunnos ja sen tarkkuus Versio: 1.0 / 3.2.2016
JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 6: EUREF-FIN:n ja KKJ:n välinen kolmiulotteinen yhdenmuotoisuusmuunnos ja sen tarkkuus Versio: 1.0 / 3.2.2016
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA. Lauri Karppi j82095. SATE.2010 Dynaaminen kenttäteoria DIPOLIRYHMÄANTENNI.
 VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Oskari Uitto i78966 Lauri Karppi j82095 SATE.2010 Dynaaminen kenttäteoria DIPOLIRYHMÄANTENNI Sivumäärä: 14 Jätetty tarkastettavaksi: 25.02.2008 Työn
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Oskari Uitto i78966 Lauri Karppi j82095 SATE.2010 Dynaaminen kenttäteoria DIPOLIRYHMÄANTENNI Sivumäärä: 14 Jätetty tarkastettavaksi: 25.02.2008 Työn
Suuriformaattiset digitaaliset ilmakuvakamerat
 Maa 57.270, Fotogrammetrian, kaukokartoituksen ja kuvantulkinnan seminaari Suuriformaattiset digitaaliset ilmakuvakamerat 2007 Lauri Saarinen Sisällysluettelo 1 Johdanto...3 2 Digitaalinen ilmakuvakamera...3
Maa 57.270, Fotogrammetrian, kaukokartoituksen ja kuvantulkinnan seminaari Suuriformaattiset digitaaliset ilmakuvakamerat 2007 Lauri Saarinen Sisällysluettelo 1 Johdanto...3 2 Digitaalinen ilmakuvakamera...3
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta
 Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Luento 5. Stereomittauksen tarkkuus Maa Fotogrammetrian perusteet 1
 Luento 5 Stereomittauksen tarkkuus 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin
Luento 5 Stereomittauksen tarkkuus 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin
PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9.2.2011
 PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9..0 Kokeessa saa vastata enintään kymmeneen tehtävään.. Sievennä a) 9 x x 6x + 9, b) 5 9 009 a a, c) log 7 + lne 7. Muovailuvahasta tehty säännöllinen tetraedri muovataan
PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9..0 Kokeessa saa vastata enintään kymmeneen tehtävään.. Sievennä a) 9 x x 6x + 9, b) 5 9 009 a a, c) log 7 + lne 7. Muovailuvahasta tehty säännöllinen tetraedri muovataan
Luento 11: Stereomallin ulkoinen orientointi
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Tehdään laadukas painotuote
 Tehdään laadukas painotuote 8 vinkkiä valokuvien ottamisesta ja toimittamiseen painotuotteisiin 1. Kuvaa kameran parhailla asetuksilla Kuvien tarkkuuden ja tiedostopakkauksen vaikutukset ovat korostuneet
Tehdään laadukas painotuote 8 vinkkiä valokuvien ottamisesta ja toimittamiseen painotuotteisiin 1. Kuvaa kameran parhailla asetuksilla Kuvien tarkkuuden ja tiedostopakkauksen vaikutukset ovat korostuneet
KUVAMUOKKAUS HARJOITUS
 KUVAMUOKKAUS HARJOITUS PUNASILMÄISYYS, VÄRI, KUVAKOKO, RAJAUS PUNASILMÄISYYS Kuvien punasilmäisyyden joutuu kohtaamaan usein huolimatta kameroiden hyvistä ominaisuuksista. Ohjelma tarjoaa hyvän työvälineen
KUVAMUOKKAUS HARJOITUS PUNASILMÄISYYS, VÄRI, KUVAKOKO, RAJAUS PUNASILMÄISYYS Kuvien punasilmäisyyden joutuu kohtaamaan usein huolimatta kameroiden hyvistä ominaisuuksista. Ohjelma tarjoaa hyvän työvälineen
Digikuvan peruskäsittelyn. sittelyn työnkulku. Soukan Kamerat 22.1.2007. Soukan Kamerat/SV
 Digikuvan peruskäsittelyn sittelyn työnkulku Soukan Kamerat 22.1.2007 Sisält ltö Digikuvan siirtäminen kamerasta tietokoneelle Skannaus Kuvan kääntäminen Värien säätö Sävyjen säätö Kuvan koko ja resoluutio
Digikuvan peruskäsittelyn sittelyn työnkulku Soukan Kamerat 22.1.2007 Sisält ltö Digikuvan siirtäminen kamerasta tietokoneelle Skannaus Kuvan kääntäminen Värien säätö Sävyjen säätö Kuvan koko ja resoluutio
Luento 3: Kuvahavainnot
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Stereopaikannusjärjestelmän tarkkuus (3 op)
") Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
3D-kuvauksen tekniikat ja sovelluskohteet. Mikael Hornborg
 3D-kuvauksen tekniikat ja sovelluskohteet Mikael Hornborg Luennon sisältö 1. Optiset koordinaattimittauskoneet 2. 3D skannerit 3. Sovelluskohteet Johdanto Optiset mittaustekniikat perustuvat valoon ja
3D-kuvauksen tekniikat ja sovelluskohteet Mikael Hornborg Luennon sisältö 1. Optiset koordinaattimittauskoneet 2. 3D skannerit 3. Sovelluskohteet Johdanto Optiset mittaustekniikat perustuvat valoon ja
Otannasta ja mittaamisesta
 Otannasta ja mittaamisesta Tilastotiede käytännön tutkimuksessa - kurssi, kesä 2001 Reijo Sund Aineistot Kvantitatiivisen tutkimuksen aineistoksi kelpaa periaatteessa kaikki havaintoihin perustuva informaatio,
Otannasta ja mittaamisesta Tilastotiede käytännön tutkimuksessa - kurssi, kesä 2001 Reijo Sund Aineistot Kvantitatiivisen tutkimuksen aineistoksi kelpaa periaatteessa kaikki havaintoihin perustuva informaatio,
PIKSELIT JA RESOLUUTIO
 PIKSELIT JA RESOLUUTIO 22.2.2015 ATK Seniorit Mukanetti ry / Tuula P 2 Pikselit ja resoluutio Outoja sanoja Outoja käsitteitä Mikä resoluutio? Mikä pikseli? Mitä tarkoittavat? Miksi niitä on? Milloin tarvitaan?
PIKSELIT JA RESOLUUTIO 22.2.2015 ATK Seniorit Mukanetti ry / Tuula P 2 Pikselit ja resoluutio Outoja sanoja Outoja käsitteitä Mikä resoluutio? Mikä pikseli? Mitä tarkoittavat? Miksi niitä on? Milloin tarvitaan?
1/6 TEKNIIKKA JA LIIKENNE FYSIIKAN LABORATORIO V1.31 9.2011
 1/6 333. SÄDEOPTIIKKA JA FOTOMETRIA A. INSSIN POTTOVÄIN JA TAITTOKYVYN MÄÄRITTÄMINEN 1. Työn tavoite. Teoriaa 3. Työn suoritus Työssä perehdytään valon kulkuun väliaineissa ja niiden rajapinnoissa sädeoptiikan
1/6 333. SÄDEOPTIIKKA JA FOTOMETRIA A. INSSIN POTTOVÄIN JA TAITTOKYVYN MÄÄRITTÄMINEN 1. Työn tavoite. Teoriaa 3. Työn suoritus Työssä perehdytään valon kulkuun väliaineissa ja niiden rajapinnoissa sädeoptiikan
1) Maan muodon selvittäminen. 2) Leveys- ja pituuspiirit. 3) Mittaaminen
 Maan muodon selvittäminen. 2) Leveys- ja pituuspiirit. 3) Mittaaminen") 1) Maan muodon selvittäminen Nykyään on helppo sanoa, että maa on pallon muotoinen olet todennäköisesti itsekin nähnyt kuvia maasta avaruudesta kuvattuna. Mutta onko maapallomme täydellinen pallo? Tutki
1) Maan muodon selvittäminen Nykyään on helppo sanoa, että maa on pallon muotoinen olet todennäköisesti itsekin nähnyt kuvia maasta avaruudesta kuvattuna. Mutta onko maapallomme täydellinen pallo? Tutki
Kahden suoran leikkauspiste ja välinen kulma (suoraparvia)
") Kahden suoran leikkauspiste ja välinen kulma (suoraparvia) Piste x 0, y 0 on suoralla, jos sen koordinaatit toteuttavat suoran yhtälön. Esimerkki Olkoon suora 2x + y + 8 = 0 y = 2x 8. Piste 5,2 ei ole
Kahden suoran leikkauspiste ja välinen kulma (suoraparvia) Piste x 0, y 0 on suoralla, jos sen koordinaatit toteuttavat suoran yhtälön. Esimerkki Olkoon suora 2x + y + 8 = 0 y = 2x 8. Piste 5,2 ei ole
Kojemeteorologia. Sami Haapanala syksy 2013. Fysiikan laitos, Ilmakehätieteiden osasto
 Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Mittalaitteiden staattiset ominaisuudet Mittalaitteita kuvaavat tunnusluvut voidaan jakaa kahteen luokkaan Staattisiin
Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Mittalaitteiden staattiset ominaisuudet Mittalaitteita kuvaavat tunnusluvut voidaan jakaa kahteen luokkaan Staattisiin
Ratkaisu: Maksimivalovoiman lauseke koostuu heijastimen maksimivalovoimasta ja valonlähteestä suoraan (ilman heijastumista) tulevasta valovoimasta:
 tulevasta valovoimasta:") LASKUHARJOITUS 1 VALAISIMIEN OPTIIKKA Tehtävä 1 Pistemäinen valonlähde (Φ = 1000 lm, valokappaleen luminanssi L = 2500 kcd/m 2 ) sijoitetaan 15 cm suuruisen pyörähdysparaboloidin muotoisen peiliheijastimen
LASKUHARJOITUS 1 VALAISIMIEN OPTIIKKA Tehtävä 1 Pistemäinen valonlähde (Φ = 1000 lm, valokappaleen luminanssi L = 2500 kcd/m 2 ) sijoitetaan 15 cm suuruisen pyörähdysparaboloidin muotoisen peiliheijastimen
SINI- JA KOSINILAUSE. Laskentamenetelmät Geodeettinen laskenta - 1-1988-1999 M-Mies Oy
 SINI- JA KOSINILAUSE SINILAUSE: Kolmiossa kulman sinien suhde on sama kuin kulman vastaisten sivujen suhde. Toisin sanoen samassa kolmiossa SIN Kulma / Sivu = Vakio (Jos > 100 gon: Kulma = 200 kulma).
SINI- JA KOSINILAUSE SINILAUSE: Kolmiossa kulman sinien suhde on sama kuin kulman vastaisten sivujen suhde. Toisin sanoen samassa kolmiossa SIN Kulma / Sivu = Vakio (Jos > 100 gon: Kulma = 200 kulma).
LIITE 1 VIRHEEN ARVIOINNISTA
 1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
Jatkuvat satunnaismuuttujat
 Jatkuvat satunnaismuuttujat Satunnaismuuttuja on jatkuva jos se voi ainakin periaatteessa saada kaikkia mahdollisia reaalilukuarvoja ainakin tietyltä väliltä. Täytyy ymmärtää, että tällä ei ole mitään
Jatkuvat satunnaismuuttujat Satunnaismuuttuja on jatkuva jos se voi ainakin periaatteessa saada kaikkia mahdollisia reaalilukuarvoja ainakin tietyltä väliltä. Täytyy ymmärtää, että tällä ei ole mitään
I AM YOUR 1 NIKKOR FINDER
 I AM YOUR FINDER I AM VISUAL PERFECTION Nikon 1 -järjestelmäkameroilla elämäsi vauhdikkaimpien hetkien ikuistaminen onnistuu kätevästi. Vaihdettavalla objektiivilla varustetut Nikon 1 -kamerat ovat erittäin
I AM YOUR FINDER I AM VISUAL PERFECTION Nikon 1 -järjestelmäkameroilla elämäsi vauhdikkaimpien hetkien ikuistaminen onnistuu kätevästi. Vaihdettavalla objektiivilla varustetut Nikon 1 -kamerat ovat erittäin
Luento 10: Optinen 3-D mittaus ja laserkeilaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
LIITE 1 VIRHEEN ARVIOINNISTA
 1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
Rihtausohje. J.Puhakka
 Rihtausohje Pyörän vanteen pinnoitus (rihtaus) on aikaa vievä toimenpide, joka vaatii kärsivällisyyttä tekijältään. Tässä on ohje, joka toivottavasti helpottaa osaltaan työn onnistumista. J.Puhakka 1 Pinnat
Rihtausohje Pyörän vanteen pinnoitus (rihtaus) on aikaa vievä toimenpide, joka vaatii kärsivällisyyttä tekijältään. Tässä on ohje, joka toivottavasti helpottaa osaltaan työn onnistumista. J.Puhakka 1 Pinnat
Mittaushavaintojen täsmällinen käsittelymenenetelmä
 Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
Esittelyssä AutoDome Easy Täydellinen keskikokoisiin kohteisiin
 Esittelyssä AutoDome Easy Täydellinen keskikokoisiin kohteisiin PTZ-kamera, joka on suunniteltu sopimaan täydellisesti kaikkialle Kun kiinteä minidome-kamera ei riitä, mutta perinteinen PTZ-kamera on turhan
Esittelyssä AutoDome Easy Täydellinen keskikokoisiin kohteisiin PTZ-kamera, joka on suunniteltu sopimaan täydellisesti kaikkialle Kun kiinteä minidome-kamera ei riitä, mutta perinteinen PTZ-kamera on turhan
c) Määritä paraabelin yhtälö, kun tiedetään, että sen huippu on y-akselilla korkeudella 6 ja sen nollakohdat ovat x-akselin kohdissa x=-2 ja x=2.
 Määritä paraabelin yhtälö, kun tiedetään, että sen huippu on y-akselilla korkeudella 6 ja sen nollakohdat ovat x-akselin kohdissa x=-2 ja x=2.") MAA4 Koe 5.5.01 Jussi Tyni Kaikkiin tehtäviin ratkaisujen välivaiheet näkyviin! Ota kokeesta poistuessasi tämä paperi mukaasi! Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Valitse
MAA4 Koe 5.5.01 Jussi Tyni Kaikkiin tehtäviin ratkaisujen välivaiheet näkyviin! Ota kokeesta poistuessasi tämä paperi mukaasi! Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Valitse
Mat Sovellettu todennäköisyyslasku A. Moniulotteiset jakaumat. Avainsanat:
 Mat-.9 Sovellettu todennäköisyyslasku A Mat-.9 Sovellettu todennäköisyyslasku A / Ratkaisut Aiheet: Avainsanat: Moniulotteiset jakaumat Diskreetti jakauma, Ehdollinen jakauma, Ehdollinen odotusarvo, Jatkuva
Mat-.9 Sovellettu todennäköisyyslasku A Mat-.9 Sovellettu todennäköisyyslasku A / Ratkaisut Aiheet: Avainsanat: Moniulotteiset jakaumat Diskreetti jakauma, Ehdollinen jakauma, Ehdollinen odotusarvo, Jatkuva
Ensimmäisen asteen polynomifunktio
 Ensimmäisen asteen polnomifunktio Yhtälön f = a+ b, a 0 määrittelemää funktiota sanotaan ensimmäisen asteen polnomifunktioksi. Esimerkki. Ensimmäisen asteen polnomifuktioita ovat esimerkiksi f = 3 7, v()
Ensimmäisen asteen polnomifunktio Yhtälön f = a+ b, a 0 määrittelemää funktiota sanotaan ensimmäisen asteen polnomifunktioksi. Esimerkki. Ensimmäisen asteen polnomifuktioita ovat esimerkiksi f = 3 7, v()
Pitkä matematiikka Suullinen kuulustelu (ma00s001.doc) Tehtävät, jotka on merkitty (V), ovat vaativia.
 Tehtävät, jotka on merkitty (V), ovat vaativia.") Pitkä matematiikka Suullinen kuulustelu (ma00s00doc) Tehtävät, jotka on merkitty (V), ovat vaativia Yleistä Ratkaise yhtälöt n n n n n 5 a) 5 + 5 + 5 + 5 + 5 = 5 b) ( ) ( ) > 0 + = + c) ( ) Suureet ja
Pitkä matematiikka Suullinen kuulustelu (ma00s00doc) Tehtävät, jotka on merkitty (V), ovat vaativia Yleistä Ratkaise yhtälöt n n n n n 5 a) 5 + 5 + 5 + 5 + 5 = 5 b) ( ) ( ) > 0 + = + c) ( ) Suureet ja
Deformoituvan metallirakenteen fotogrammetrinen muodonmuutosmittaus
 Deformoituvan metallirakenteen fotogrammetrinen muodonmuutosmittaus Diplomityö, joka on jätetty opinnäytteenä tarkastettavaksi diplomi-insinöörin tutkintoa varten. Espoo, huhtikuu 2015 Tekniikan kandidaatti
Deformoituvan metallirakenteen fotogrammetrinen muodonmuutosmittaus Diplomityö, joka on jätetty opinnäytteenä tarkastettavaksi diplomi-insinöörin tutkintoa varten. Espoo, huhtikuu 2015 Tekniikan kandidaatti
S11-04 Kompaktikamerat stereokamerajärjestelmässä. Projektisuunnitelma
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Projektisuunnitelma Ari-Matti Reinsalo Anssi Niemi 28.1.2011 Projektityön tavoite Projektityössä
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Projektisuunnitelma Ari-Matti Reinsalo Anssi Niemi 28.1.2011 Projektityön tavoite Projektityössä
Casion fx-cg20 ylioppilaskirjoituksissa apuna
 Casion fx-cg20 ylioppilaskirjoituksissa apuna Grafiikkalaskin on oivallinen apuväline ongelmien ratkaisun tukena. Sen avulla voi piirtää kuvaajat, ratkaista yhtälöt ja yhtälöryhmät, suorittaa funktioanalyysin
Casion fx-cg20 ylioppilaskirjoituksissa apuna Grafiikkalaskin on oivallinen apuväline ongelmien ratkaisun tukena. Sen avulla voi piirtää kuvaajat, ratkaista yhtälöt ja yhtälöryhmät, suorittaa funktioanalyysin
7.4 PERUSPISTEIDEN SIJAINTI
 67 7.4 PERUSPISTEIDEN SIJAINTI Optisen systeemin peruspisteet saadaan systeemimatriisista. Käytetään seuraavan kuvan merkintöjä: Kuvassa sisäänmenotaso on ensimmäisen linssin ensimmäisessä pinnassa eli
67 7.4 PERUSPISTEIDEN SIJAINTI Optisen systeemin peruspisteet saadaan systeemimatriisista. Käytetään seuraavan kuvan merkintöjä: Kuvassa sisäänmenotaso on ensimmäisen linssin ensimmäisessä pinnassa eli
FYSIIKAN LABORATORIOTYÖT 2 HILA JA PRISMA
 FYSIIKAN LABORATORIOTYÖT HILA JA PRISMA MIKKO LAINE 9. toukokuuta 05. Johdanto Tässä työssä muodostamme lasiprisman dispersiokäyrän ja määritämme työn tekijän silmän herkkyysrajan punaiselle valolle. Lisäksi
FYSIIKAN LABORATORIOTYÖT HILA JA PRISMA MIKKO LAINE 9. toukokuuta 05. Johdanto Tässä työssä muodostamme lasiprisman dispersiokäyrän ja määritämme työn tekijän silmän herkkyysrajan punaiselle valolle. Lisäksi
Leica Sprinter Siitä vain... Paina nappia
 Sprinter Siitä vain... Paina nappia Sprinter 50 Tähtää, paina nappia, lue tulos Pölyn ja veden kestävä Kompakti ja kevyt muotoilu Virheettömät korkeuden ja etäisyyden lukemat Toiminnot yhdellä painikkeella
Sprinter Siitä vain... Paina nappia Sprinter 50 Tähtää, paina nappia, lue tulos Pölyn ja veden kestävä Kompakti ja kevyt muotoilu Virheettömät korkeuden ja etäisyyden lukemat Toiminnot yhdellä painikkeella
Erikoistekniikoita. Moiré - shadow-moiré - projection-moiré. Rasterifotogrammetria - yhden juovan menetelmä - monen juovan menetelmä
 Erikoistekniikoita Moiré - shadow-moiré - projection-moiré Rasterifotogrammetria - yhden juovan menetelmä - monen juovan menetelmä Tomografia - periaate Hologrammetria - periaate Motografia Moiré-tekniikka
Erikoistekniikoita Moiré - shadow-moiré - projection-moiré Rasterifotogrammetria - yhden juovan menetelmä - monen juovan menetelmä Tomografia - periaate Hologrammetria - periaate Motografia Moiré-tekniikka
LED VALON KÄYTTÖSOVELLUKSIA.
 LED VALON KÄYTTÖSOVELLUKSIA. PALJONKO LED VALO ANTAA VALOA? MITÄ EROJA ON ERI LINSSEILLÄ? Onko LED -valosta haastajaksi halogeenivalolle? Linssien avautumiskulma ja valoteho 8 (LED 3K, LED 6K ja halogeeni
LED VALON KÄYTTÖSOVELLUKSIA. PALJONKO LED VALO ANTAA VALOA? MITÄ EROJA ON ERI LINSSEILLÄ? Onko LED -valosta haastajaksi halogeenivalolle? Linssien avautumiskulma ja valoteho 8 (LED 3K, LED 6K ja halogeeni
B. 2 E. en tiedä C. 6. 2 ovat luonnollisia lukuja?
 Nimi Koulutus Ryhmä Jokaisessa tehtävässä on vain yksi vastausvaihtoehto oikein. Laske tehtävät ilman laskinta.. Missä pisteessä suora y = 3x 6 leikkaa x-akselin? A. 3 D. B. E. en tiedä C. 6. Mitkä luvuista,,,
Nimi Koulutus Ryhmä Jokaisessa tehtävässä on vain yksi vastausvaihtoehto oikein. Laske tehtävät ilman laskinta.. Missä pisteessä suora y = 3x 6 leikkaa x-akselin? A. 3 D. B. E. en tiedä C. 6. Mitkä luvuista,,,
www.terrasolid.com Kaupunkimallit
 www.terrasolid.com Kaupunkimallit Arttu Soininen 03.12.2015 Vuonna 1993 Isoja askeleita 1993-2015 Laserkeilaus helikopterilla/lentokoneella Laserkeilaus paikaltaan GPS+IMU yleistynyt kaikkeen ilmasta mittaukseen
www.terrasolid.com Kaupunkimallit Arttu Soininen 03.12.2015 Vuonna 1993 Isoja askeleita 1993-2015 Laserkeilaus helikopterilla/lentokoneella Laserkeilaus paikaltaan GPS+IMU yleistynyt kaikkeen ilmasta mittaukseen
Tekijä Pitkä matematiikka Pisteen (x, y) etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.
 etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.") Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
Differentiaali- ja integraalilaskenta 2 (CHEM) MS-A0207 Hakula/Vuojamo Kurssitentti, 12.2, 2018, arvosteluperusteet
 MS-A0207 Hakula/Vuojamo Kurssitentti, 12.2, 2018, arvosteluperusteet") ifferentiaali- ja integraalilaskenta 2 (CHEM) MS-A27 Hakula/Vuojamo Kurssitentti, 2.2, 28, arvosteluperusteet T Moniosaisten tehtävien osien painoarvo on sama ellei muuta ole erikseen osoitettu. Kokeessa
ifferentiaali- ja integraalilaskenta 2 (CHEM) MS-A27 Hakula/Vuojamo Kurssitentti, 2.2, 28, arvosteluperusteet T Moniosaisten tehtävien osien painoarvo on sama ellei muuta ole erikseen osoitettu. Kokeessa
 MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
Tampereen yliopisto Tietokonegrafiikka 2013 Tietojenkäsittelytiede Harjoitus
 Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
KÄYTTÖOHJE LÄMPÖTILA-ANEMOMETRI DT-619
 KÄYTTÖOHJE LÄMPÖTILA-ANEMOMETRI DT-619 2007 S&A MATINTUPA 1. ILMAVIRTAUKSEN MITTAUS Suora, 1:n pisteen mittaus a) Kytke mittalaitteeseen virta. b) Paina UNITS - näppäintä ja valitse haluttu mittayksikkö
KÄYTTÖOHJE LÄMPÖTILA-ANEMOMETRI DT-619 2007 S&A MATINTUPA 1. ILMAVIRTAUKSEN MITTAUS Suora, 1:n pisteen mittaus a) Kytke mittalaitteeseen virta. b) Paina UNITS - näppäintä ja valitse haluttu mittayksikkö
Luento 3 Kuvaus- ja mittauskalusto. erikoissovellukset
 Luento 3 Kuvaus- ja mittauskalusto 1 Aiheita Mittakamerat Digitaaliset kamerat Komparaattorit Ohjelmistot 2 Photogrammetry 1907 27 stations 111 photographs 7 geodetic control points 3 Photogrammetric documentation
Luento 3 Kuvaus- ja mittauskalusto 1 Aiheita Mittakamerat Digitaaliset kamerat Komparaattorit Ohjelmistot 2 Photogrammetry 1907 27 stations 111 photographs 7 geodetic control points 3 Photogrammetric documentation
Maa-57.270 Fotogrammetrian, kuvatulkinnan ja kaukokartoituksen seminaari Liikennejärjestelmien kuvaaminen laserkeilauksen avulla
 Maa-57.270 Fotogrammetrian, kuvatulkinnan ja kaukokartoituksen seminaari Liikennejärjestelmien kuvaaminen laserkeilauksen avulla Paula Ylönen 60375P paula.ylonen(a)tkk.fi Sisällys 1 Johdanto s. 2 2 Laserkeilain
Maa-57.270 Fotogrammetrian, kuvatulkinnan ja kaukokartoituksen seminaari Liikennejärjestelmien kuvaaminen laserkeilauksen avulla Paula Ylönen 60375P paula.ylonen(a)tkk.fi Sisällys 1 Johdanto s. 2 2 Laserkeilain
Testo 106 suojakotelolla Nopea mittari omavalvontaan.
 Testo 106 suojakotelolla Nopea mittari omavalvontaan. Nopea mittaus ohuella mittapäällä jälkiä jättämättä Tarkka mittaustulos Äänihälytys Testo 106:ssa on erittäin nopea ja tarkka NTC-anturi yhdistettynä
Testo 106 suojakotelolla Nopea mittari omavalvontaan. Nopea mittaus ohuella mittapäällä jälkiä jättämättä Tarkka mittaustulos Äänihälytys Testo 106:ssa on erittäin nopea ja tarkka NTC-anturi yhdistettynä
Luento 2: Kuvakoordinaattien mittaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 14.9.2005) Luento 2: Kuvakoordinaattien mittaus Mitä pitäisi oppia? Muunnokset informaatiokanavassa (osin kertausta) Erotella kuvaan ja
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 14.9.2005) Luento 2: Kuvakoordinaattien mittaus Mitä pitäisi oppia? Muunnokset informaatiokanavassa (osin kertausta) Erotella kuvaan ja
Johdatus tekoälyn taustalla olevaan matematiikkaan
 Johdatus tekoälyn taustalla olevaan matematiikkaan Informaatioteknologian tiedekunta Jyväskylän yliopisto 2. luento 10.11.2017 Keinotekoiset neuroverkot Neuroverkko koostuu syöte- ja ulostulokerroksesta
Johdatus tekoälyn taustalla olevaan matematiikkaan Informaatioteknologian tiedekunta Jyväskylän yliopisto 2. luento 10.11.2017 Keinotekoiset neuroverkot Neuroverkko koostuu syöte- ja ulostulokerroksesta
Geodeettisen laitoksen koordinaattimuunnospalvelu
 Geodeettisen laitoksen koordinaattimuunnospalvelu Janne Kovanen Geodeettinen laitos 10.3.2010 Koordinaattimuunnospalvelusta lyhyesti Ilmainen palvelu on ollut tarjolla syksystä 2008 lähtien. Web-sovellus
Geodeettisen laitoksen koordinaattimuunnospalvelu Janne Kovanen Geodeettinen laitos 10.3.2010 Koordinaattimuunnospalvelusta lyhyesti Ilmainen palvelu on ollut tarjolla syksystä 2008 lähtien. Web-sovellus
Leica ScanStation 2 Poikkeuksellisen nopea, uskomattoman joustava
 Leica ScanStation 2 Poikkeuksellisen nopea, uskomattoman joustava Leica ScanStation 2 Laserkeilainten joustavuuden ja nopeuden uusi taso 10-kertainen maksimimittausnopeuden kasvu ja takymetreistä tuttu
Leica ScanStation 2 Poikkeuksellisen nopea, uskomattoman joustava Leica ScanStation 2 Laserkeilainten joustavuuden ja nopeuden uusi taso 10-kertainen maksimimittausnopeuden kasvu ja takymetreistä tuttu
Korkeusmallien vertailua ja käyttö nitraattiasetuksen soveltamisessa
 Korkeusmallien vertailua ja käyttö nitraattiasetuksen soveltamisessa Valtakunnallisesti kattavaa laserkeilausaineistoa ei vielä ole. Kaltevuusmallit perustuvat tällä hetkellä digitaalisen korkeusmallin
Korkeusmallien vertailua ja käyttö nitraattiasetuksen soveltamisessa Valtakunnallisesti kattavaa laserkeilausaineistoa ei vielä ole. Kaltevuusmallit perustuvat tällä hetkellä digitaalisen korkeusmallin
y=-3x+2 y=2x-3 y=3x+2 x = = 6
 MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää
 Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
Mittaustulosten tilastollinen käsittely
 Mittaustulosten tilastollinen käsittely n kertaa toistetun mittauksen tulos lasketaan aritmeettisena keskiarvona n 1 x = x i n i= 1 Mittaustuloksen hajonnasta aiheutuvaa epävarmuutta kuvaa keskiarvon keskivirhe
Mittaustulosten tilastollinen käsittely n kertaa toistetun mittauksen tulos lasketaan aritmeettisena keskiarvona n 1 x = x i n i= 1 Mittaustuloksen hajonnasta aiheutuvaa epävarmuutta kuvaa keskiarvon keskivirhe
LIITE 1 VIRHEEN ARVIOINNISTA
 Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Luento 4: Kolmiointihavainnot
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
15. Suorakulmaisen kolmion geometria
 15. Suorakulmaisen kolmion geometria 15.1 Yleistä kolmioista - kolmion kulmien summa on 180⁰ α α + β + γ = 180⁰ β γ 5.1.1 Tasasivuinen kolmio - jos kaikki kolmion sivut ovat yhtä pitkät, on kolmio tasasivuinen
15. Suorakulmaisen kolmion geometria 15.1 Yleistä kolmioista - kolmion kulmien summa on 180⁰ α α + β + γ = 180⁰ β γ 5.1.1 Tasasivuinen kolmio - jos kaikki kolmion sivut ovat yhtä pitkät, on kolmio tasasivuinen
Todellinen 3D-ohjauksensuuntauslaite
 geoliner 680 ja geoliner 780 Huipputarkka Kaikki ajoneuvojen säätöarvot tulevat suoraan autovalmistajilta ja ovat tarkkoja ja luotettavia. Kehittynyt kamerajärjestelmä on erittäin tarkka ja takaa luotettavan
geoliner 680 ja geoliner 780 Huipputarkka Kaikki ajoneuvojen säätöarvot tulevat suoraan autovalmistajilta ja ovat tarkkoja ja luotettavia. Kehittynyt kamerajärjestelmä on erittäin tarkka ja takaa luotettavan
Mittausjärjestelmän kalibrointi ja mittausepävarmuus
 Mittausjärjestelmän kalibrointi ja mittausepävarmuus Kalibrointi kalibroinnin merkitys kansainvälinen ja kansallinen mittanormaalijärjestelmä kalibroinnin määritelmä mittausjärjestelmän kalibrointivaihtoehdot
Mittausjärjestelmän kalibrointi ja mittausepävarmuus Kalibrointi kalibroinnin merkitys kansainvälinen ja kansallinen mittanormaalijärjestelmä kalibroinnin määritelmä mittausjärjestelmän kalibrointivaihtoehdot
A-osio. Ilman laskinta. MAOL-taulukkokirja saa olla käytössä. Maksimissaan tunti aikaa. Laske kaikki tehtävät:
 MAA3 Geometria Koe 5.2.2016 Jussi Tyni Lue ohjeet ja tee tehtävät huolellisesti! Tee tarvittavat välivaiheet, vaikka laskimesta voikin ottaa tuloksia. Välivaiheet perustelevat vastauksesi. Tee pisteytysruudukko
MAA3 Geometria Koe 5.2.2016 Jussi Tyni Lue ohjeet ja tee tehtävät huolellisesti! Tee tarvittavat välivaiheet, vaikka laskimesta voikin ottaa tuloksia. Välivaiheet perustelevat vastauksesi. Tee pisteytysruudukko
Menetelmät tietosuojan toteutumisen tukena - käytännön esimerkkejä. Tilastoaineistot tutkijan työvälineenä - mahdollisuudet ja rajat 2.3.
 Menetelmät tietosuojan toteutumisen tukena - käytännön esimerkkejä Tilastoaineistot tutkijan työvälineenä - mahdollisuudet ja rajat 2.3.2009 Tietosuoja - lähtökohdat! Periaatteena on estää yksiköiden suora
Menetelmät tietosuojan toteutumisen tukena - käytännön esimerkkejä Tilastoaineistot tutkijan työvälineenä - mahdollisuudet ja rajat 2.3.2009 Tietosuoja - lähtökohdat! Periaatteena on estää yksiköiden suora
Oikeanlaisten virtapihtien valinta Aloita vastaamalla seuraaviin kysymyksiin löytääksesi oikeantyyppiset virtapihdit haluamaasi käyttökohteeseen.
 Oikeanlaisten virtapihtien valinta Aloita vastaamalla seuraaviin kysymyksiin löytääksesi oikeantyyppiset virtapihdit haluamaasi käyttökohteeseen. 1. Tuletko mittaamaan AC tai DC -virtaa? (DC -pihdit luokitellaan
Oikeanlaisten virtapihtien valinta Aloita vastaamalla seuraaviin kysymyksiin löytääksesi oikeantyyppiset virtapihdit haluamaasi käyttökohteeseen. 1. Tuletko mittaamaan AC tai DC -virtaa? (DC -pihdit luokitellaan
Geometrian kertausta. MAB2 Juhani Kaukoranta Raahen lukio
 Geometrian kertausta MAB2 Juhani Kaukoranta Raahen lukio Ristikulmat Ristikulmat ovat yhtä suuret keskenään Vieruskulmien summa 180 Muodostavat yhdessä oikokulman 180-50 =130 50 Samankohtaiset kulmat Kun
Geometrian kertausta MAB2 Juhani Kaukoranta Raahen lukio Ristikulmat Ristikulmat ovat yhtä suuret keskenään Vieruskulmien summa 180 Muodostavat yhdessä oikokulman 180-50 =130 50 Samankohtaiset kulmat Kun
ja J r ovat vektoreita ja että niiden tulee olla otettu saman pyörimisakselin suhteen. Massapisteen hitausmomentti on
 FYSA210 / K1 HITAUSMOMENTTI Työn tavoitteena on opetella määrittämään kappaleen hitausmomentti kappaletta pyörittämällä ja samalla havainnollistaa kitkan vaikutusta. Massapisteinä toimivat keskipisteestään
FYSA210 / K1 HITAUSMOMENTTI Työn tavoitteena on opetella määrittämään kappaleen hitausmomentti kappaletta pyörittämällä ja samalla havainnollistaa kitkan vaikutusta. Massapisteinä toimivat keskipisteestään
DistanceMaster 80 DE 04 GB 11 NL 18 DK 25 FR 32 ES 39 IT 46 PL 53 FI 60 PT 67 SE 74 NO TR RU UA CZ EE LV LT RO BG GR
 DistanceMaster 80 DE GB NL DK FR ES IT PL PT SE NO TR RU UA CZ EE LV LT RO BG GR 04 11 18 25 32 39 46 53 60 67 74 ! a h i b 2. 4. 6.! 60 Lue lisäohjeet. käyttöohje Noudata kokonaan. annettuja Lue ohjeita.
DistanceMaster 80 DE GB NL DK FR ES IT PL PT SE NO TR RU UA CZ EE LV LT RO BG GR 04 11 18 25 32 39 46 53 60 67 74 ! a h i b 2. 4. 6.! 60 Lue lisäohjeet. käyttöohje Noudata kokonaan. annettuja Lue ohjeita.
Tutkimustiedonhallinnan peruskurssi
 Tutkimustiedonhallinnan peruskurssi Hannu Toivonen, Marko Salmenkivi, Inkeri Verkamo hannu.toivonen, marko.salmenkivi, inkeri.verkamo@cs.helsinki.fi Helsingin yliopisto Hannu Toivonen, Marko Salmenkivi,
Tutkimustiedonhallinnan peruskurssi Hannu Toivonen, Marko Salmenkivi, Inkeri Verkamo hannu.toivonen, marko.salmenkivi, inkeri.verkamo@cs.helsinki.fi Helsingin yliopisto Hannu Toivonen, Marko Salmenkivi,
Laserkeilauksen ja kuvauksen tilaaminen
 www.terrasolid.com Laserkeilauksen ja kuvauksen tilaaminen Arttu Soininen 22.08.2017 Käsiteltävät aiheet Tarjouspyynnössä määrättävät asiat Laserkeilaustyön jakaminen osiin Ajankohdan vaikutus laserkeilaukseen
www.terrasolid.com Laserkeilauksen ja kuvauksen tilaaminen Arttu Soininen 22.08.2017 Käsiteltävät aiheet Tarjouspyynnössä määrättävät asiat Laserkeilaustyön jakaminen osiin Ajankohdan vaikutus laserkeilaukseen
Jani Sipola & Timo Kauppi. Konenäkö putkiprofiilien dimensiomittauksissa
 Jani Sipola & Timo Kauppi Konenäkö putkiprofiilien dimensiomittauksissa Kemi-Tornion ammattikorkeakoulun julkaisuja Sarja E. Työpapereita 2/2010 Jani Sipola & Timo Kauppi Konenäkö putkiprofiilien dimensiomittauksissa
Jani Sipola & Timo Kauppi Konenäkö putkiprofiilien dimensiomittauksissa Kemi-Tornion ammattikorkeakoulun julkaisuja Sarja E. Työpapereita 2/2010 Jani Sipola & Timo Kauppi Konenäkö putkiprofiilien dimensiomittauksissa
Puun geometrisen laatutiedon mittaukset monikameramenetelmällä
 Metsätehon raportti 183 11.3.2005 Rajoitettu jakelu Järvi-Suomen Uittoyhdistys Kuhmo Oy Metsähallitus Metsäliitto Osuuskunta Metsäteollisuus ry Pölkky Oy Stora Enso Oyj UPM-Kymmene Oyj Vapo Timber Oy Visuvesi
Metsätehon raportti 183 11.3.2005 Rajoitettu jakelu Järvi-Suomen Uittoyhdistys Kuhmo Oy Metsähallitus Metsäliitto Osuuskunta Metsäteollisuus ry Pölkky Oy Stora Enso Oyj UPM-Kymmene Oyj Vapo Timber Oy Visuvesi