SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
|
|
|
- Kauko Mattila
- 5 vuotta sitten
- Katselukertoja:
Transkriptio

1 ENSO IKONEN PYOSYS SÄÄÖJÄRJESELMIEN SUUNNIELU Enso Ionen professori säätö- ja ssteemiteniia Oulun liopisto Äläät oneet ja järjestelmät helmiuu 209
2 ENSO IKONEN PYOSYS 2 Oppimistavoitteet Opiselija......hahmottaa identifioinnin neljä vaihetta datan haninta malliraenteen valinta parametrien estimointi mallin validointi seä vaiheiden iteratiivisuuden....huomaa lineaarisen regressiomallin ja ltisiirtofuntion välisen hteden...enee itsenäisesti ättämään pienimmän neliösumman menetelmää lineaarisen aiasarjamallin parametrien estimointiin....osaa muuntaa aiasarjamallin jatuvaaiaisesi siirtofuntiosi
3 ENSO IKONEN PYOSYS 3 Säätöjärjestelmien suunnittelu SäSu Identifiointi 0.4 Lineaariset regressiomallit 0.5 Parametrien estimointi Esimeri 0.2 Mallintamisesta 0.3 Identifioinnin vaiheet 0.4 Lineaarisen regressiomallit superpositioperiaate dnaamisten ssteemien mallit
4 ENSO IKONEN PYOSYS Prosessien mallintamisesta fsiaaliset mallit: mallintamisen perustana ovat: massa- ja energiataseet, aineensiirron ja meaniian lait,... jne jne ongelmia: meanismeja ei tunneta saatavat mallit ovat tarpeettoman monimutaisia mallinnettavat ohteet muuttuvat ennustamattomasti mallintaminen on aiaa (=resursseja) vievää oeelliset mallit: mitataan ssteemin sisäänmenot ja ulostulot onstruoidaan i/oättätmistä toistava malli gra box mallit semifsiaalinen mallintaminen onseptuaalinen mallintaminen mallintaminen on aina approsimointia tarvittava taruus riippuu tarpeesta
5 ENSO IKONEN PYOSYS Prosessin identifioinnin neljä vaihetta I mittausten eruu sopivan mittausdatan haninta II malliraenteen valinta mitä jo tiedetään? miä on epäselvää? III parametrien estimointi sovitetaan malliraenne dataan IV mallin validointi uina hvä malli on? araterisoinnin/ mallinnusen tarve data raenteen valinta parametrien estimointi validointi malli

6 ENSO IKONEN PYOSYS Prosessin identifioinnin neljä vaihetta. Mittausten eruu oesuunnittelu oeohjelma / sis.menosevenssit, jne mittausväli oeiden toteutus suodatus & esiäsittel 2. Malliraenteen valinta mallin sisäänmenojen valinta lineaarinen/ epälineaarinen dnaaminen malliraenne: FIR/FS, ARX, OE,... omponenttien ertaluvut gra-box mallit (a priori tieto) araterisoinnin/ mallinnusen tarve data raenteen valinta parametrien estimointi validointi malli 3. Parametrien estimointi optimointi: LS, PEM,... LI, aiamuuttuva, rajoitettu,... riippuu valitusta malliraenteesta 4. Hvden arviointi verifiointi Are ou building it right? validointi Are ou building the right thing? testidata / ristiinvalidointi iteratiivinen proseduuri
7 ENSO IKONEN PYOSYS 7 Dnaamisen mallintamisen oesignaaleja siniaalto si taajuus anttiaalto (binäärinen) sisäänmenosignaalin arvo aia
8 ENSO IKONEN PYOSYS 8 Dnaamisen mallintamisen oesignaaleja siniaalto si taajuus anttiaalto (binäärinen) PRBS Pseudo-Random-Binar Signal

9 ENSO IKONEN PYOSYS 9 Dnaamisen mallintamisen oesignaaleja siniaalto si taajuus anttiaalto (binäärinen) PRBS Pseudo-Random-Binar Signal PRS Pseudo-Random-Signal multivariable sstems.. # steps.. nois sstems # repetitions.. time-varing sstems # update period,
 f(x) = x+b ssteemin ulostulon lineaarisuus....sisäänmenojen suhteen (mallin uvaus)..parametrien suhteen (parametrien estimointiteniioiden valinta) x")
10 ENSO IKONEN PYOSYS 0 Lineaariset regressiomallit affiinit malliraenteet Lineaarinen (affiini) ssteemi superpositio + homogeenisuus f(x) f(ax+b) = af(x) + bf() f(x) = x+b ssteemin ulostulon lineaarisuus....sisäänmenojen suhteen (mallin uvaus)..parametrien suhteen (parametrien estimointiteniioiden valinta) x
11 ENSO IKONEN PYOSYS Lineaariset regressiomallit matriisiesits Notaatio mallin ulostulo parametrivetori regressiovetori ohina (ajanheten) indesi I i I i θ 2 2 ja missä Järjestelmän malli
12 ENSO IKONEN PYOSYS 2 Dnaamiset järjestelmät lineaarisina regressiomalleina m d u d u n b b a a m n and 0 Aiasarjamalli: regressiomallina: m u b d u b n a a m n 0 parametrivetori regressiovetori viivästettjä ulostulon ja ohjausen arvoja (mittausia) ssteemin vaioparametrit (tuntemattomat)

13 ENSO IKONEN PYOSYS 3 Parametrien estimointi araterisoinnin tarve Kerätään data Kirjoitetaan malli (lineaarisen) regressiomallin muotoon, missä tuntemattomat teijät ovat vetorissa θ Parametrien estimoinnissa haetaan numeeriset arvot mallin tuntemattomille omponenteille data raenteen valinta parametrien estimointi validointi malli
14 ENSO IKONEN PYOSYS 4 Säätöjärjestelmien suunnittelu SäSu Identifiointi 0.4 Lineaarisen regressiomallit 0.5 Parametrien estimointi Esimeri 0.5 Parametrien estimointi 0.5. PNM Matriisiesits 0.6 Identifiointi Matlabin avulla 0.7 Esimeri
15 ENSO IKONEN PYOSYS 5 Pienimmän neliösumman menetelmä (PNM) method of least squares (LS) Millainen on hvä estimaatti? PNM:n riteeri: neliöllisten residuaalien summa J minimointi on järevää reaalimaailman sovellusissa Kuina minimoida J? J on neliöllinen parametrien suhteen asetetaan gradientti nollasi (etsitään optimi) varmistetaan että optimi on minimi J K K 2 ˆ ˆ arg min J K K aava mallin parametrien estimoimisesi K:n I/O-dataparin avulla
16 ENSO IKONEN PYOSYS 6 Pienimmän neliösumman menetelmä ätännöllisempi muoto Määritellään jolloin PNM estimaatti saadaan aavasta K K K K K I I I 2 ja Φ Φ Φ Φ θ ˆ johto': sinertainen '
17 ENSO IKONEN PYOSYS 7 Esimeri PNM Prosessista on mitattu dataparit (u(),()) ajanhetillä =0,,2,3,4: u() () u prosessin sisäänmeno prosessin ulostulo Oletetaan malliraenteesi: (+) = a()+bu() Hae a ja b jota parhaiten sovittavat malliraenteen dataan u P u , aia t=h
18 ENSO IKONEN PYOSYS 8 Esimeri PNM jatuu Data: u() () Malliraenne: () = a(-)+bu(-) Kirjoitetaan muotoon: θ ˆ a θ, b 2 Φ 4 ( ) u( ) 0 u0 u 3 u 3 ja 2 4 >> Fi % (-), u(-) Fi = >> Y % () Y = >> theta = inv(fi'*fi)*fi'*y theta = ˆ.0000 θ Φ Φ Φ
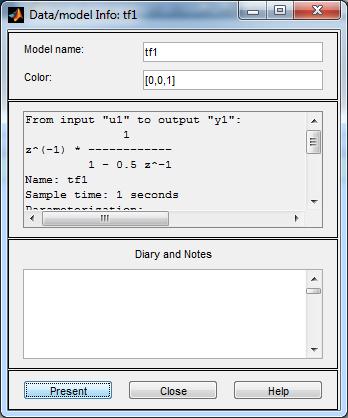
19 ENSO IKONEN PYOSYS 9 Esimeri PNM jatuu (muunnos jatuva-aiaisesi) (+)=0.5()+u() Z-muunnettuna: (z-0.5)y(z) = U(z) Y(z)/U(z) = /(z-0.5) => napa (disr.) z= Sama MALABilla: >> h=; ss = tf(,[ -0.5],h) >> ssc = d2c(ss) Step Response z = e sh s = (/h) lnz h on sämpläsväli e.g. h= => napa (jat.) s=(/h) ln0.5 = Y(s)/U(s) =.38/(s+0.69) = 2/(.45s+) Amplitude ime (seconds)
20 ENSO IKONEN PYOSYS 20 Epävarmuus osa data on satunnaista, estimoitu malli on satunnainen Bias-varianssi dilemma estidata ja opetusdata jaetaan mitattu data ahteen osaan ätetään opetusdataa validointivaiheessa (arvioitaessa mallin hvttä) asi (satunnaista) datajouoa samasta prosessista: x datajouo o datajouo 2 x x datalla estimoidun mallin vaste o o datalla 2 estimoidun mallin vaste oiea/paras mallin vaste (minimoi neliöllisen virheen odotusarvon) variable o x x o o x x o time Joustava malliraenne: = pieni bias, suuri varianssi Vähemmän vapausasteita: = suuri bias, vähän heiluntaa Malliraenteen valinta on ompromissi näiden välillä datan todennäöisstihesfuntio (data on satunnaista)
21 ENSO IKONEN PYOSYS 2 Harjoitus prosessin identifiointi Prosessista on mitattu uvan dataa. Identifioi prosessille malli sisäänmenosta u ulostuloon. u Oleta ensimmäisen ertaluvun malliraenne (+)=a()+bu(). θˆ Φ Φ Φ 2 Φ K 2 I K K K 2 I I sample (time) ja 2 K
22 ENSO IKONEN PYOSYS 22 Harjoitus prosessin identifiointi (rataisu) Muodosta Φ ja Y. Lase äsin, tai lasimella, tai Matlabilla: Φ Φ, [Φ Φ] -, [Φ Φ] - Φ Y = θ X adj X det X Fi = Fi *Fi = inv(fi *Fi) = theta =
23 ENSO IKONEN PYOSYS 23 Harjoitus prosessin identifiointi (rataisu) Muodosta Φ ja Y. Lase äsin, tai lasimella, tai Matlabilla: Φ Φ, [Φ Φ] -, [Φ Φ] - Φ Y = θ X adj X det X u Fi = Fi *Fi = inv(fi *Fi) = hat (-sa) hat sample theta =
24 ENSO IKONEN PYOSYS 24 Oppimistavoitteet Opiselija......hahmottaa identifioinnin neljä vaihetta datan haninta malliraenteen valinta parametrien estimointi mallin validointi seä vaiheiden iteratiivisuuden....huomaa lineaarisen regressiomallin ja ltisiirtofuntion välisen hteden...enee itsenäisesti ättämään pienimmän neliösumman menetelmää lineaarisen aiasarjamallin parametrien estimointiin....osaa muuntaa aiasarjamallin jatuvaaiaisesi siirtofuntiosi


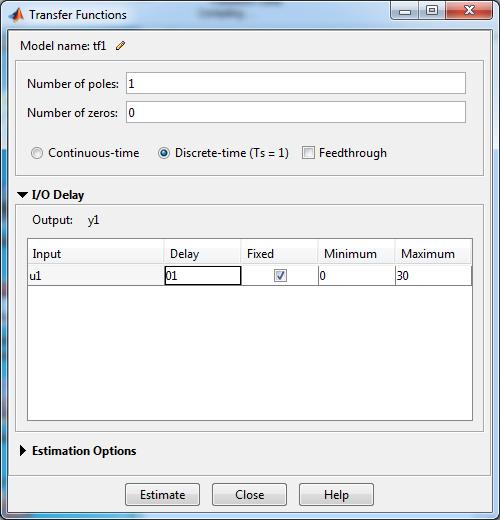
25 ENSO IKONEN PYOSYS 25 MALAB ident-toolbox Import data to MALAB variable(s) >> ident
26 ENSO IKONEN PYOSYS 26 Uncertaint since data is random, estimated model is random raining data and test data separate training data from validation data bias variance dilemma bootstrapping simple but requires excess data Parameter probabilit Var{θ},P in LS confidence bounds probabilit of model probabilit of data MC simulations Useful but heav computational load R 2 -test (and alie) rate the explanation capabilit of estimated model compare vs. a standard response mean, linear useful for comparing different models
27 ENSO IKONEN PYOSYS 27 SäSu 209 hteenveto sisällöistä Säätösuunnittelun töalut Laplace-muunnos, osamurrot lohoaaviot 2-3 Aiatason vasteet, suoritus ja suljettu piiri navat, nollat, vahvistus aiataso vs navat suljettu piiri, mötätentä gang of six napojensijoittelu, juuriura 4-5 PID-säätö ja sen virits P, I ja D, perushtälöt implementointi Ziegler-Nichols, lambda-virits 6 Digitaaliset ssteemit disretointi, Z-muunnos 7 Analsi taajuustasossa taajuustason vaste Bode-uvaaja 8-9 Säätösuunnittelu taajuustasossa silmuasiirtofuntio vaihevara, vahvistusvara, sensitiivissvara loop shaping 0 Identifiointi identifioinnin 4 vaihetta pienimmän neliösumman menetelmä
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Systeemitekniikan laboratorio Jan 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Systeemitekniikan laboratorio Jan 2019
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät helmikuu 2019 ENSO IKONEN PYOSYS
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät helmikuu 2019 ENSO IKONEN PYOSYS
Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C (s+1)(s+0.02) 50s+1
 Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C (s+1)(s+0.02) 50s+1") ENSO IKONEN PYOSYS Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C. 1 P(s) = -----------------(s+1)(s+0.02) C(s) = 50s+1 --------50s Piirrä vasteet asetusarvosta. Kommentoi
ENSO IKONEN PYOSYS Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C. 1 P(s) = -----------------(s+1)(s+0.02) C(s) = 50s+1 --------50s Piirrä vasteet asetusarvosta. Kommentoi
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät, Systeemitekniikka Feb 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät, Systeemitekniikka Feb 2019
[ ] [ 2 [ ] [ ] ( ) [ ] Tehtävä 1. ( ) ( ) ( ) ( ) ( ) ( ) 2( ) = 1. E v k 1( ) R E[ v k v k ] E e k e k e k e k. e k e k e k e k.
![[ ] [ 2 [ ] [ ] ( ) [ ] Tehtävä 1. ( ) ( ) ( ) ( ) ( ) ( ) 2( ) = 1. E v k 1( ) R E[ v k v k ] E e k e k e k e k. e k e k e k e k.](/thumbs/70/63966855.jpg "[ ] [ 2 [ ] [ ] ( ) [ ] Tehtävä 1. ( ) ( ) ( ) ( ) ( ) ( ) 2( ) = 1. E v k 1( ) R E[ v k v k ] E e k e k e k e k. e k e k e k e k.") ehtävä. x( + ) x( y x( + e ( y x( + e ( E v E e ( ) e ( R E[ v v ] E e e e e e e e e 6 estimointivirhe: ~ x( x( x$( x( - b y ( - b y ( estimointivirheen odotusarvo: x( - b x( - b e ( - b x( - b e ( ( -
ehtävä. x( + ) x( y x( + e ( y x( + e ( E v E e ( ) e ( R E[ v v ] E e e e e e e e e 6 estimointivirhe: ~ x( x( x$( x( - b y ( - b y ( estimointivirheen odotusarvo: x( - b x( - b e ( - b x( - b e ( ( -
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / Systeemitekniikka Jan 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / Systeemitekniikka Jan 2019
Estimointi Laajennettu Kalman-suodin. AS , Automaation signaalinkäsittelymenetelmät Laskuharjoitus 4
 Estimointi Laajennettu Kalman-suodin AS-84.2161, Automaation signaalinäsittelymenetelmät Lasuharjoitus 4 Estimointi Systeemin tilaa estimoidaan, un prosessin tilamalli tunnetaan Tilamalli voi olla lineaarinen
Estimointi Laajennettu Kalman-suodin AS-84.2161, Automaation signaalinäsittelymenetelmät Lasuharjoitus 4 Estimointi Systeemin tilaa estimoidaan, un prosessin tilamalli tunnetaan Tilamalli voi olla lineaarinen
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / systeemitekniikka Jan 019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / systeemitekniikka Jan 019
Laskuharjoitus 9, tehtävä 6
 Aalto-yliopiston perustieteiden korkeakoulu Jouni Pousi Systeemianalyysin laboratorio Mat-2.4129 Systeemien identifiointi Laskuharjoitus 9, tehtävä 6 Tämä ohje sisältää vaihtoehtoisen tavan laskuharjoituksen
Aalto-yliopiston perustieteiden korkeakoulu Jouni Pousi Systeemianalyysin laboratorio Mat-2.4129 Systeemien identifiointi Laskuharjoitus 9, tehtävä 6 Tämä ohje sisältää vaihtoehtoisen tavan laskuharjoituksen
Projekti 5 Systeemifunktiot ja kaksiportit. Kukin ryhmistä tarkastelee piiriä eri taajuuksilla. Ryhmäni taajuus on
 EPOP Kevät 2012 Projeti 5 Systeemifuntiot ja asiportit Tämä projeti tehdään 3 hengen ryhmissä. Ryhmääni uuluvat Kuin ryhmistä tarastelee piiriä eri taajuusilla. Ryhmäni taajuus on Seuraavan projetin aiana
EPOP Kevät 2012 Projeti 5 Systeemifuntiot ja asiportit Tämä projeti tehdään 3 hengen ryhmissä. Ryhmääni uuluvat Kuin ryhmistä tarastelee piiriä eri taajuusilla. Ryhmäni taajuus on Seuraavan projetin aiana
järjestelmät Diskreettiaikaiset järjestelmät aikatason analyysi DEE Lineaariset järjestelmät Risto Mikkonen
 DEE- Lineaariset järjestelmät Disreettiaiaiset järjestelmät aiatason analsi DEE- Lineaariset järjestelmät Risto Mionen Disreettiaiaiset järjestelmät 7 3 5 Lineaaristen, vaioertoimisten differenssihtälöiden
DEE- Lineaariset järjestelmät Disreettiaiaiset järjestelmät aiatason analsi DEE- Lineaariset järjestelmät Risto Mionen Disreettiaiaiset järjestelmät 7 3 5 Lineaaristen, vaioertoimisten differenssihtälöiden
Kalman-suodin. AS , Automaation signaalinkäsittelymenetelmät. Laskuharjoitus 3
 Kalman-suodin AS-84.2161, Automaation signaalinäsittelmenetelmät Lasuhajoitus 3 Ideaalisen posessin tilamalli x( 1) x( ) Ax( ) Bu( ) u B A x Slide 2 Ideaalisen posessin tilamalli x( 1) x( ) Ax( ) Bu( )
Kalman-suodin AS-84.2161, Automaation signaalinäsittelmenetelmät Lasuhajoitus 3 Ideaalisen posessin tilamalli x( 1) x( ) Ax( ) Bu( ) u B A x Slide 2 Ideaalisen posessin tilamalli x( 1) x( ) Ax( ) Bu( )
Harjoitus 9: Excel - Tilastollinen analyysi
 Harjoitus 9: Excel - Tilastollinen analyysi Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen regressioanalyysiin
Harjoitus 9: Excel - Tilastollinen analyysi Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen regressioanalyysiin
Missä mennään. systeemi. identifiointi. mallikandidaatti. validointi. malli. (fysikaalinen) mallintaminen. mallin mallin käyttötarkoitus, reunaehdot
 mallintaminen. mallin mallin käyttötarkoitus, reunaehdot") Missä mennään systeemi mallin mallin käyttötarkoitus, reunaehdot käyttö- (fysikaalinen) mallintaminen luonnonlait yms. yms. identifiointi kokeita kokeita + päättely päättely vertailu mallikandidaatti validointi
Missä mennään systeemi mallin mallin käyttötarkoitus, reunaehdot käyttö- (fysikaalinen) mallintaminen luonnonlait yms. yms. identifiointi kokeita kokeita + päättely päättely vertailu mallikandidaatti validointi
Ilkka Mellin Tilastolliset menetelmät Osa 2: Otokset, otosjakaumat ja estimointi Estimointi
 Ilkka Mellin Tilastolliset menetelmät Osa 2: Otokset, otosjakaumat ja estimointi Estimointi TKK (c) Ilkka Mellin (2006) 1 Estimointi >> Todennäköisyysjakaumien parametrit ja niiden estimointi Hyvän estimaattorin
Ilkka Mellin Tilastolliset menetelmät Osa 2: Otokset, otosjakaumat ja estimointi Estimointi TKK (c) Ilkka Mellin (2006) 1 Estimointi >> Todennäköisyysjakaumien parametrit ja niiden estimointi Hyvän estimaattorin
Tilastollisen analyysin perusteet Luento 7: Lineaarinen regressio
 Tilastollisen analyysin perusteet Luento 7: Lineaarinen regressio Sisältö Regressioanalyysissä tavoitteena on tutkia yhden tai useamman selittävän muuttujan vaikutusta selitettävään muuttujaan. Sen avulla
Tilastollisen analyysin perusteet Luento 7: Lineaarinen regressio Sisältö Regressioanalyysissä tavoitteena on tutkia yhden tai useamman selittävän muuttujan vaikutusta selitettävään muuttujaan. Sen avulla
Identifiointiprosessi
 Alustavia kokeita Identifiointiprosessi Koesuunnittelu, identifiointikoe Mittaustulosten / datan esikäsittely Ei-parametriset menetelmät: - Transientti-, korrelaatio-, taajuus-, Fourier- ja spektraalianalyysi
Alustavia kokeita Identifiointiprosessi Koesuunnittelu, identifiointikoe Mittaustulosten / datan esikäsittely Ei-parametriset menetelmät: - Transientti-, korrelaatio-, taajuus-, Fourier- ja spektraalianalyysi
Johdatus tilastotieteeseen Estimointi. TKK (c) Ilkka Mellin (2005) 1
 Ilkka Mellin (2005) 1") Johdatus tilastotieteeseen Estimointi TKK (c) Ilkka Mellin (2005) 1 Estimointi Todennäköisyysjakaumien parametrit ja niiden estimointi Hyvän estimaattorin ominaisuudet TKK (c) Ilkka Mellin (2005) 2 Estimointi:
Johdatus tilastotieteeseen Estimointi TKK (c) Ilkka Mellin (2005) 1 Estimointi Todennäköisyysjakaumien parametrit ja niiden estimointi Hyvän estimaattorin ominaisuudet TKK (c) Ilkka Mellin (2005) 2 Estimointi:
Tehtävä 1. Vaihtoehtotehtävät.
 Kem-9.47 Prosessiautomaation perusteet Tentti.4. Tehtävä. Vaihtoehtotehtävät. Oikea vastaus +,5p, väärä vastaus -,5p ja ei vastausta p Maksimi +5,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA
Kem-9.47 Prosessiautomaation perusteet Tentti.4. Tehtävä. Vaihtoehtotehtävät. Oikea vastaus +,5p, väärä vastaus -,5p ja ei vastausta p Maksimi +5,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA
Estimointi. Estimointi. Estimointi: Mitä opimme? 2/4. Estimointi: Mitä opimme? 1/4. Estimointi: Mitä opimme? 3/4. Estimointi: Mitä opimme?
 TKK (c) Ilkka Mellin (2004) 1 Johdatus tilastotieteeseen TKK (c) Ilkka Mellin (2004) 2 Mitä opimme? 1/4 Tilastollisen tutkimuksen tavoitteena on tehdä johtopäätöksiä prosesseista, jotka generoivat reaalimaailman
TKK (c) Ilkka Mellin (2004) 1 Johdatus tilastotieteeseen TKK (c) Ilkka Mellin (2004) 2 Mitä opimme? 1/4 Tilastollisen tutkimuksen tavoitteena on tehdä johtopäätöksiä prosesseista, jotka generoivat reaalimaailman
Dynaamisten systeemien identifiointi 1/2
 Dynaamisten systeemien identifiointi 1/2 Mallin rakentaminen mittausten avulla Epäparametriset menetelmät: tuloksena malli, joka ei perustu parametreille impulssi-, askel- tai taajusvaste siirtofunktion
Dynaamisten systeemien identifiointi 1/2 Mallin rakentaminen mittausten avulla Epäparametriset menetelmät: tuloksena malli, joka ei perustu parametreille impulssi-, askel- tai taajusvaste siirtofunktion
1 PID-taajuusvastesuunnittelun esimerkki
 Enso Ikonen, Oulun yliopisto, systeemitekniikan laboratorio 2/23 Säätöjärjestelmien suunnittelu 23 PID-taajuusvastesuunnittelun esimerkki Tehtävänä on suunnitella säätö prosessille ( ) = = ( +)( 2 + )
Enso Ikonen, Oulun yliopisto, systeemitekniikan laboratorio 2/23 Säätöjärjestelmien suunnittelu 23 PID-taajuusvastesuunnittelun esimerkki Tehtävänä on suunnitella säätö prosessille ( ) = = ( +)( 2 + )
Harha mallin arvioinnissa
 Esitelmä 12 Antti Toppila sivu 1/18 Optimointiopin seminaari Syksy 2010 Harha mallin arvioinnissa Antti Toppila 13.10.2010 Esitelmä 12 Antti Toppila sivu 2/18 Optimointiopin seminaari Syksy 2010 Sisältö
Esitelmä 12 Antti Toppila sivu 1/18 Optimointiopin seminaari Syksy 2010 Harha mallin arvioinnissa Antti Toppila 13.10.2010 Esitelmä 12 Antti Toppila sivu 2/18 Optimointiopin seminaari Syksy 2010 Sisältö
Regressioanalyysi. Kuusinen/Heliövaara 1
 Regressioanalyysi Kuusinen/Heliövaara 1 Regressioanalyysin idea ja tavoitteet Regressioanalyysin idea: Oletetaan, että haluamme selittää jonkin selitettävän muuttujan havaittujen arvojen vaihtelun joidenkin
Regressioanalyysi Kuusinen/Heliövaara 1 Regressioanalyysin idea ja tavoitteet Regressioanalyysin idea: Oletetaan, että haluamme selittää jonkin selitettävän muuttujan havaittujen arvojen vaihtelun joidenkin
järjestelmät Luku 2 Diskreettiaikaiset järjestelmät - aikataso DEE Lineaariset järjestelmät Risto Mikkonen
 DEE- Lineaariset järjestelmät Luu 2 Disreettiaiaiset järjestelmät - aiataso DEE- Lineaariset järjestelmät Risto Mionen 6.9.26 Diseettiaiainen vs jatuva-aiainen Jatuvan signaalin u(t) nätteistäminen disreetisi
DEE- Lineaariset järjestelmät Luu 2 Disreettiaiaiset järjestelmät - aiataso DEE- Lineaariset järjestelmät Risto Mionen 6.9.26 Diseettiaiainen vs jatuva-aiainen Jatuvan signaalin u(t) nätteistäminen disreetisi
Tilastollisen analyysin perusteet Luento 9: Moniulotteinen lineaarinen. regressio
 Tilastollisen analyysin perusteet Luento 9: lineaarinen lineaarinen Sisältö lineaarinen lineaarinen lineaarinen Lineaarinen Oletetaan, että meillä on n kappaletta (x 1, y 1 ), (x 2, y 2 )..., (x n, y n
Tilastollisen analyysin perusteet Luento 9: lineaarinen lineaarinen Sisältö lineaarinen lineaarinen lineaarinen Lineaarinen Oletetaan, että meillä on n kappaletta (x 1, y 1 ), (x 2, y 2 )..., (x n, y n
järjestelmät Luku 1 Johdanto; termit ja käsitteet 1 DEE Lineaariset järjestelmät Risto Mikkonen
 DEE-00 Lineaariset järjestelmät Luu Johdanto; termit ja äsitteet DEE-00 Lineaariset järjestelmät Risto Mionen DEE-00 Lineaariset järjestelmät I+II periodi Luennot, Risto Mionen, SH 3 Harjoituset, Tiina
DEE-00 Lineaariset järjestelmät Luu Johdanto; termit ja äsitteet DEE-00 Lineaariset järjestelmät Risto Mionen DEE-00 Lineaariset järjestelmät I+II periodi Luennot, Risto Mionen, SH 3 Harjoituset, Tiina
Vastepintamenetelmä. Kuusinen/Heliövaara 1
 Vastepintamenetelmä Kuusinen/Heliövaara 1 Vastepintamenetelmä Vastepintamenetelmässä pyritään vasteen riippuvuutta siihen vaikuttavista tekijöistä approksimoimaan tekijöiden polynomimuotoisella funktiolla,
Vastepintamenetelmä Kuusinen/Heliövaara 1 Vastepintamenetelmä Vastepintamenetelmässä pyritään vasteen riippuvuutta siihen vaikuttavista tekijöistä approksimoimaan tekijöiden polynomimuotoisella funktiolla,
Harjoitustyö 3. Heiluri-vaunusysteemin parametrien estimointi
 Aalto-yliopiston perustieteiden korkeakoulu Systeemianalyysin laboratorio Mat-2.4129 Systeemien identifiointi Harjoitustyö 3 Heiluri-vaunusysteemin parametrien estimointi Yleistä Systeemianalyysin laboratoriossa
Aalto-yliopiston perustieteiden korkeakoulu Systeemianalyysin laboratorio Mat-2.4129 Systeemien identifiointi Harjoitustyö 3 Heiluri-vaunusysteemin parametrien estimointi Yleistä Systeemianalyysin laboratoriossa
Regressioanalyysi. Vilkkumaa / Kuusinen 1
 Regressioanalyysi Vilkkumaa / Kuusinen 1 Regressioanalyysin idea ja tavoitteet Regressioanalyysin idea: Halutaan selittää selitettävän muuttujan havaittujen arvojen vaihtelua selittävien muuttujien havaittujen
Regressioanalyysi Vilkkumaa / Kuusinen 1 Regressioanalyysin idea ja tavoitteet Regressioanalyysin idea: Halutaan selittää selitettävän muuttujan havaittujen arvojen vaihtelua selittävien muuttujien havaittujen
Osa 2: Otokset, otosjakaumat ja estimointi
 Ilkka Mellin Tilastolliset menetelmät Osa 2: Otokset, otosjakaumat ja estimointi Estimointi TKK (c) Ilkka Mellin (2007) 1 Estimointi >> Todennäköisyysjakaumien parametrit ja niiden estimointi Hyvän estimaattorin
Ilkka Mellin Tilastolliset menetelmät Osa 2: Otokset, otosjakaumat ja estimointi Estimointi TKK (c) Ilkka Mellin (2007) 1 Estimointi >> Todennäköisyysjakaumien parametrit ja niiden estimointi Hyvän estimaattorin
Mat Systeemien identifiointi, aihepiirit 1/4
 , aihepiirit 1/4 Dynaamisten systeemien matemaattinen mallintaminen ja analyysi Matlab (System Identification Toolbox), Simulink 1. Matemaattinen mallintaminen: Mallintamisen ja mallin määritelmät Fysikaalinen
, aihepiirit 1/4 Dynaamisten systeemien matemaattinen mallintaminen ja analyysi Matlab (System Identification Toolbox), Simulink 1. Matemaattinen mallintaminen: Mallintamisen ja mallin määritelmät Fysikaalinen
Projekti 5 Systeemifunktiot ja kaksiportit. Kukin ryhmistä tarkastelee piiriä eri taajuuksilla. Ryhmäni taajuus on
 EPOP Kevät 2012 Projeti 5 Systeemifuntiot ja asiportit Tämä projeti tehdään 3 hengen ryhmissä. yhmääni uuluvat Kuin ryhmistä tarastelee piiriä eri taajuusilla. yhmäni taajuus on Seuraavan projetin aiana
EPOP Kevät 2012 Projeti 5 Systeemifuntiot ja asiportit Tämä projeti tehdään 3 hengen ryhmissä. yhmääni uuluvat Kuin ryhmistä tarastelee piiriä eri taajuusilla. yhmäni taajuus on Seuraavan projetin aiana
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
ENSO IKONEN PYOSYS SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
Miehitysluvuille voidaan kirjoittaa Maxwell Boltzmann jakauman mukaan. saamme miehityslukujen summan muodossa
 S-4.7 Fysiia III (EST) Tetti..6. Tarastellaa systeemiä, jossa ullai hiuasella o olme mahdollista eergiatasoa, ε ja ε, missä ε o eräs vaio. Oletetaa, että systeemi oudattaa Maxwell-Boltzma jaaumaa ja, että
S-4.7 Fysiia III (EST) Tetti..6. Tarastellaa systeemiä, jossa ullai hiuasella o olme mahdollista eergiatasoa, ε ja ε, missä ε o eräs vaio. Oletetaa, että systeemi oudattaa Maxwell-Boltzma jaaumaa ja, että
Identifiointiprosessi
 Identifiointiprosessi Koesuunnittelu Identifiointikoe Datan esikäsittely Mallirakenteen valinta Parametrien estimointi Diagnostiset testit Mallin validointi Mallin käyttö & ylläpito Identifiointi- ja simulointiohjelmistoja
Identifiointiprosessi Koesuunnittelu Identifiointikoe Datan esikäsittely Mallirakenteen valinta Parametrien estimointi Diagnostiset testit Mallin validointi Mallin käyttö & ylläpito Identifiointi- ja simulointiohjelmistoja
SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS),
,") SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS), 5.2.2019 Tentin arvosteluperusteita: o Kurssin alku on osin kertausta SäAn ja prosessidynamiikkakursseista, jotka oletetaan
SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS), 5.2.2019 Tentin arvosteluperusteita: o Kurssin alku on osin kertausta SäAn ja prosessidynamiikkakursseista, jotka oletetaan
Johdatus regressioanalyysiin. Heliövaara 1
 Johdatus regressioanalyysiin Heliövaara 1 Regressioanalyysin idea Oletetaan, että haluamme selittää jonkin selitettävän muuttujan havaittujen arvojen vaihtelun selittävien muuttujien havaittujen arvojen
Johdatus regressioanalyysiin Heliövaara 1 Regressioanalyysin idea Oletetaan, että haluamme selittää jonkin selitettävän muuttujan havaittujen arvojen vaihtelun selittävien muuttujien havaittujen arvojen
1. PÄÄTTELY YHDEN SELITTÄJÄN LINEAARISESTA REGRESSIOMALLISTA
 Mat-2.104 Tilastollisen analyysin perusteet / Ratkaisut Aiheet: Avainsanat Päättely yhden selittäjän lineaarisesta regressiomallista Ennustaminen, Ennuste, Ennusteen luottamusväli, Estimaatti, Estimaattori,
Mat-2.104 Tilastollisen analyysin perusteet / Ratkaisut Aiheet: Avainsanat Päättely yhden selittäjän lineaarisesta regressiomallista Ennustaminen, Ennuste, Ennusteen luottamusväli, Estimaatti, Estimaattori,
MTTTP5, luento Luottamusväli, määritelmä
 23.11.2017/1 MTTTP5, luento 23.11.2017 Luottamusväli, määritelmä Olkoot A ja B satunnaisotoksen perusteella määriteltyjä satunnaismuuttujia. Väli (A, B) on parametrin 100(1 - ) %:n luottamusväli, jos P(A
23.11.2017/1 MTTTP5, luento 23.11.2017 Luottamusväli, määritelmä Olkoot A ja B satunnaisotoksen perusteella määriteltyjä satunnaismuuttujia. Väli (A, B) on parametrin 100(1 - ) %:n luottamusväli, jos P(A
Yleistä. Aalto-yliopisto Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos
 Aalto-yliopisto Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos MS-E2129 Systeemien identifiointi 3. Harjoitustyö Heiluri-vaunusysteemin parametrien estimointi Yleistä Systeemianalyysin
Aalto-yliopisto Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos MS-E2129 Systeemien identifiointi 3. Harjoitustyö Heiluri-vaunusysteemin parametrien estimointi Yleistä Systeemianalyysin
BM20A5840 Usean muuttujan funktiot ja sarjat Harjoitus 7, Kevät 2018
 BM20A5840 Usean muuttujan funktiot ja sarjat Harjoitus 7, Kevät 2018 Tehtävä 8 on tällä kertaa pakollinen. Aloittakaapa siitä. 1. Kun tässä tehtävässä sanotaan sopii mahdollisimman hyvin, sillä tarkoitetaan
BM20A5840 Usean muuttujan funktiot ja sarjat Harjoitus 7, Kevät 2018 Tehtävä 8 on tällä kertaa pakollinen. Aloittakaapa siitä. 1. Kun tässä tehtävässä sanotaan sopii mahdollisimman hyvin, sillä tarkoitetaan
Otanta-aineistojen analyysi (78136, 78405) Kevät 2010 TEEMA 4: Asetelmaperusteinen monimuuttuja-analyysi
 Kevät 2010 TEEMA 4: Asetelmaperusteinen monimuuttuja-analyysi") Otanta-aineistojen analyysi (78136, 78405) Kevät 2010 TEEMA 4: Asetelmaperusteinen monimuuttuja-analyysi Risto Lehtonen risto.lehtonen@helsini.fi Analyysimenetelmiä ja työaluja Lineaariset mallit Regressioanalyysi
Otanta-aineistojen analyysi (78136, 78405) Kevät 2010 TEEMA 4: Asetelmaperusteinen monimuuttuja-analyysi Risto Lehtonen risto.lehtonen@helsini.fi Analyysimenetelmiä ja työaluja Lineaariset mallit Regressioanalyysi
Aikatason vaste vs. siirtofunktio Tehtävä
 Aikatason vaste vs. siirtofunktio Tehtävä Millainen toisen kertaluvun siirtofunktio vastaa systeemiä jonka ylitys on 10% ja asettumisaika 4 min? Y s X s = 2 n s 2 2 2 n s n M p =e t r 1.8 n t s 4.6 n 1
Aikatason vaste vs. siirtofunktio Tehtävä Millainen toisen kertaluvun siirtofunktio vastaa systeemiä jonka ylitys on 10% ja asettumisaika 4 min? Y s X s = 2 n s 2 2 2 n s n M p =e t r 1.8 n t s 4.6 n 1
Tietokoneavusteinen säätösuunnittelu (TASSU)
") Ohjeita ja esimerkkejä kurssin 470463A näyttökoetta varten Tietokoneavusteinen säätösuunnittelu (TASSU) Enso Ikonen 9/2006 Oulun yliopisto, Prosessi- ja ympäristötekniikan osasto, systeemitekniikan laboratorio
Ohjeita ja esimerkkejä kurssin 470463A näyttökoetta varten Tietokoneavusteinen säätösuunnittelu (TASSU) Enso Ikonen 9/2006 Oulun yliopisto, Prosessi- ja ympäristötekniikan osasto, systeemitekniikan laboratorio
Estimointi. Vilkkumaa / Kuusinen 1
 Estimointi Vilkkumaa / Kuusinen 1 Motivointi Tilastollisessa tutkimuksessa oletetaan jonkin jakauman generoineen tutkimuksen kohteena olevaa ilmiötä koskevat havainnot Tämän mallina käytettävän todennäköisyysjakauman
Estimointi Vilkkumaa / Kuusinen 1 Motivointi Tilastollisessa tutkimuksessa oletetaan jonkin jakauman generoineen tutkimuksen kohteena olevaa ilmiötä koskevat havainnot Tämän mallina käytettävän todennäköisyysjakauman
Sovelletun fysiikan laitos E-mail: Marko.Vauhkonen@uku.fi. Marko Vauhkonen, Kuopion yliopisto, Sovelletun fysiikan laitos Slide 1
 Marko Vauhkonen Kuopion yliopisto Sovelletun fysiikan laitos E-mail: Marko.Vauhkonen@uku.fi Marko Vauhkonen, Kuopion yliopisto, Sovelletun fysiikan laitos Slide 1 Sisältö Mallintamisesta mallien käyttötarkoituksia
Marko Vauhkonen Kuopion yliopisto Sovelletun fysiikan laitos E-mail: Marko.Vauhkonen@uku.fi Marko Vauhkonen, Kuopion yliopisto, Sovelletun fysiikan laitos Slide 1 Sisältö Mallintamisesta mallien käyttötarkoituksia
DEE Lineaariset järjestelmät Harjoitus 2, ratkaisuehdotukset. Johdanto differenssiyhtälöiden ratkaisemiseen
 D-00 Lineaariset järjestelmät Harjoitus, rataisuehdotuset Johdanto differenssiyhtälöiden rataisemiseen Differenssiyhtälöillä uvataan disreettiaiaisten järjestelmien toimintaa. Disreettiaiainen taroittaa
D-00 Lineaariset järjestelmät Harjoitus, rataisuehdotuset Johdanto differenssiyhtälöiden rataisemiseen Differenssiyhtälöillä uvataan disreettiaiaisten järjestelmien toimintaa. Disreettiaiainen taroittaa
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio. Kimmo Berg. Mat Optimointioppi. 9. harjoitus - ratkaisut
 TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2.139 Optimointioppi Kimmo Berg 9. harjoitus - ratkaisut 1. a) Viivahakutehtävä pisteessä x suuntaan d on missä min f(x + λd), λ f(x + λd) = (x
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2.139 Optimointioppi Kimmo Berg 9. harjoitus - ratkaisut 1. a) Viivahakutehtävä pisteessä x suuntaan d on missä min f(x + λd), λ f(x + λd) = (x
805324A (805679S) Aikasarja-analyysi Harjoitus 6 (2016)
 Aikasarja-analyysi Harjoitus 6 (2016)") 805324A (805679S) Aikasarja-analyysi Harjoitus 6 (2016) Tavoitteet (teoria): Hahmottaa aikasarjan klassiset komponentit ideaalisessa tilanteessa. Ymmärtää viivekuvauksen vaikutus trendiin. ARCH-prosessin
805324A (805679S) Aikasarja-analyysi Harjoitus 6 (2016) Tavoitteet (teoria): Hahmottaa aikasarjan klassiset komponentit ideaalisessa tilanteessa. Ymmärtää viivekuvauksen vaikutus trendiin. ARCH-prosessin
MS-A0503 Todennäköisyyslaskennan ja tilastotieteen peruskurssi
 MS-A0503 Todennäköisyyslaskennan ja tilastotieteen peruskurssi 5B Frekventistiset vs. bayeslaiset menetelmät Lasse Leskelä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto
MS-A0503 Todennäköisyyslaskennan ja tilastotieteen peruskurssi 5B Frekventistiset vs. bayeslaiset menetelmät Lasse Leskelä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto
Säätötekniikan matematiikan verkkokurssi, Matlab tehtäviä ja vastauksia 29.7.2002
 Matlab tehtäviä 1. Muodosta seuraavasta differentiaaliyhtälöstä siirtofuntio. Tämä differentiaaliyhtälö saattaisi kuvata esimerkiksi yksinkertaista vaimennettua jousi-massa systeemiä, johon on liitetty
Matlab tehtäviä 1. Muodosta seuraavasta differentiaaliyhtälöstä siirtofuntio. Tämä differentiaaliyhtälö saattaisi kuvata esimerkiksi yksinkertaista vaimennettua jousi-massa systeemiä, johon on liitetty
Eksponentti- ja logaritmiyhtälö
 Esponentti- ja logaritmiyhtälö Esponenttifuntio Oloon a 1 positiivinen reaaliluu. Reaalifuntiota f() = a nimitetään esponenttifuntiosi ja luua a sen antaluvusi. Jos a > 1, niin esponenttifuntio f : R R,
Esponentti- ja logaritmiyhtälö Esponenttifuntio Oloon a 1 positiivinen reaaliluu. Reaalifuntiota f() = a nimitetään esponenttifuntiosi ja luua a sen antaluvusi. Jos a > 1, niin esponenttifuntio f : R R,
ABHELSINKI UNIVERSITY OF TECHNOLOGY
 Johdatus regressioanalyysiin Regressioanalyysin idea Oletetaan, että haluamme selittää jonkin selitettävän muuttujan havaittujen arvojen vaihtelun selittävien muuttujien havaittujen arvojen vaihtelun avulla.
Johdatus regressioanalyysiin Regressioanalyysin idea Oletetaan, että haluamme selittää jonkin selitettävän muuttujan havaittujen arvojen vaihtelun selittävien muuttujien havaittujen arvojen vaihtelun avulla.
x = ( θ θ ia y = ( ) x.
 x.") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2429 Systeemien Identifiointi 5 harjoituksen ratkaisut Esitetään ensin systeemi tilayhtälömuodossa Tiloiksi valitaan
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2429 Systeemien Identifiointi 5 harjoituksen ratkaisut Esitetään ensin systeemi tilayhtälömuodossa Tiloiksi valitaan
Identifiointiprosessi II
 Identifiointiprosessi II Kertaus: informaatiokriteerit ja selittäjien testaaminen Mallin validointi Filosofisia mallinnusnäkökulmia Informaatiokriteerit Hyvyyskriteerin optimiarvo vs. parametrien lukumäärä
Identifiointiprosessi II Kertaus: informaatiokriteerit ja selittäjien testaaminen Mallin validointi Filosofisia mallinnusnäkökulmia Informaatiokriteerit Hyvyyskriteerin optimiarvo vs. parametrien lukumäärä
Laskennallinen data-analyysi II
 Laskennallinen data-analyysi II Ella Bingham, ella.bingham@cs.helsinki.fi Kevät 2008 Muuttujien valinta Kalvot perustuvat Saara Hyvösen kalvoihin 2007 Laskennallinen data-analyysi II, kevät 2008, Helsingin
Laskennallinen data-analyysi II Ella Bingham, ella.bingham@cs.helsinki.fi Kevät 2008 Muuttujien valinta Kalvot perustuvat Saara Hyvösen kalvoihin 2007 Laskennallinen data-analyysi II, kevät 2008, Helsingin
Identifiointiprosessi
 Alustavia kokeita Identifiointiprosessi Koesuunnittelu, identifiointikoe Mittaustulosten / datan esikäsittely Ei-parametriset menetelmät: - Transientti-, korrelaatio-, taajuus-, Fourier- ja spektraalianalyysi
Alustavia kokeita Identifiointiprosessi Koesuunnittelu, identifiointikoe Mittaustulosten / datan esikäsittely Ei-parametriset menetelmät: - Transientti-, korrelaatio-, taajuus-, Fourier- ja spektraalianalyysi
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä.
 Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä.") MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016
Sovellettu todennäköisyyslaskenta B
 Sovellettu todennäköisyyslaskenta B Antti Rasila 22. marraskuuta 2007 Antti Rasila () TodB 22. marraskuuta 2007 1 / 17 1 Epäparametrisia testejä (jatkoa) χ 2 -riippumattomuustesti 2 Johdatus regressioanalyysiin
Sovellettu todennäköisyyslaskenta B Antti Rasila 22. marraskuuta 2007 Antti Rasila () TodB 22. marraskuuta 2007 1 / 17 1 Epäparametrisia testejä (jatkoa) χ 2 -riippumattomuustesti 2 Johdatus regressioanalyysiin
Dynaamisten systeemien teoriaa. Systeemianalyysilaboratorio II
 Dynaamisten systeemien teoriaa Systeemianalyysilaboratorio II 15.11.2017 Vakiot, sisäänmenot, ulostulot ja häiriöt Mallin vakiot Systeemiparametrit annettuja vakioita, joita ei muuteta; esim. painovoiman
Dynaamisten systeemien teoriaa Systeemianalyysilaboratorio II 15.11.2017 Vakiot, sisäänmenot, ulostulot ja häiriöt Mallin vakiot Systeemiparametrit annettuja vakioita, joita ei muuteta; esim. painovoiman
Identifiointiprosessi
 Identifiointiprosessi Koesnnittel, identifiointikoe Mittastlosten / datan esikäsittely Ei-parametriset menetelmät: - transientti-, korrelaatio-, taajs-, Forier- ja spektraalianalyysi => askel-, implssi-
Identifiointiprosessi Koesnnittel, identifiointikoe Mittastlosten / datan esikäsittely Ei-parametriset menetelmät: - transientti-, korrelaatio-, taajs-, Forier- ja spektraalianalyysi => askel-, implssi-
Sisältö. Työn lähtökohta ja tavoitteet Lyhyt kertaus prosessista Käytetyt menetelmät Työn kulku Tulokset Ongelmat ja jatkokehitys
 Loppuraportti Sisältö Työn lähtökohta ja tavoitteet Lyhyt kertaus prosessista Käytetyt menetelmät Työn kulku Tulokset Ongelmat ja jatkokehitys Työn lähtökohta ja tavoitteet Voimalaitoskattiloiden tulipesässä
Loppuraportti Sisältö Työn lähtökohta ja tavoitteet Lyhyt kertaus prosessista Käytetyt menetelmät Työn kulku Tulokset Ongelmat ja jatkokehitys Työn lähtökohta ja tavoitteet Voimalaitoskattiloiden tulipesässä
2. kierros. 2. Lähipäivä
 2. kierros 2. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Tavoitteet: tietää Yhden navan vasteen ekvivalentti kohinakaistaleveys Vastuksen terminen kohina Termit
2. kierros 2. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Tavoitteet: tietää Yhden navan vasteen ekvivalentti kohinakaistaleveys Vastuksen terminen kohina Termit
3. kierros. 2. Lähipäivä
 3. kierros. Lähipäivä Viikon aihe (viikko /) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
3. kierros. Lähipäivä Viikon aihe (viikko /) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
Automaatiotekniikan laskentatyökalut (ALT)
") Ohjeita ja esimerkkejä kurssin 477604S näyttökoetta varten Automaatiotekniikan laskentatyökalut (ALT) Enso Ikonen 6/2008 Oulun yliopisto, Prosessi- ja ympäristötekniikan osasto, systeemitekniikan laboratorio
Ohjeita ja esimerkkejä kurssin 477604S näyttökoetta varten Automaatiotekniikan laskentatyökalut (ALT) Enso Ikonen 6/2008 Oulun yliopisto, Prosessi- ja ympäristötekniikan osasto, systeemitekniikan laboratorio
Keskipisteen lisääminen 2 k -faktorikokeeseen (ks. Montgomery 9-6)
") Mat-.3 Koesuunnittelu ja tilastolliset mallit kevät Keskipisteen lisääminen k -faktorikokeeseen (ks. Montgomery 9-6) Esim (Montg. ex. 9-, 6-): Tutkitaan kemiallisen prosessin saannon Y riippuvuutta faktoreista
Mat-.3 Koesuunnittelu ja tilastolliset mallit kevät Keskipisteen lisääminen k -faktorikokeeseen (ks. Montgomery 9-6) Esim (Montg. ex. 9-, 6-): Tutkitaan kemiallisen prosessin saannon Y riippuvuutta faktoreista
Molekulaarisuus = reagoivien molekyylien lkm Stoikiometria = tasapainotetun reaktioyhtälön lkm (ainetase)
") 1. Yleistä a) Tasapainoreation yleinen muoto: a + bb f r cc + dd K c C D B èq a b, jossa d f r [X] = yhdisteen X onsentraatio a,b,c,d = yhdisteen stöiömetria (ainetaseesta) f = reationopeus eteenpäin r
1. Yleistä a) Tasapainoreation yleinen muoto: a + bb f r cc + dd K c C D B èq a b, jossa d f r [X] = yhdisteen X onsentraatio a,b,c,d = yhdisteen stöiömetria (ainetaseesta) f = reationopeus eteenpäin r
Harjoitus 4: Matlab - Optimization Toolbox
 Harjoitus 4: Matlab - Optimization Toolbox Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Optimointimallin muodostaminen
Harjoitus 4: Matlab - Optimization Toolbox Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Optimointimallin muodostaminen
H(s) + + _. Ymit(s) Laplace-tason esitykseksi on saatu (katso jälleen kalvot):
 + + _. Ymit(s) Laplace-tason esitykseksi on saatu (katso jälleen kalvot):") ELEC-C3 Säätötekniikka 5. laskuharjoitus Vastaukset Quiz: Luennon 4 luentokalvojen (luku 4) lopussa on esimerkki: Sähköpiiri (alkaa kalvon 39 tienoilla). Lue esimerkki huolellisesti ja vastaa seuraavaan:
ELEC-C3 Säätötekniikka 5. laskuharjoitus Vastaukset Quiz: Luennon 4 luentokalvojen (luku 4) lopussa on esimerkki: Sähköpiiri (alkaa kalvon 39 tienoilla). Lue esimerkki huolellisesti ja vastaa seuraavaan:
Havaitsevan tähtitieteen peruskurssi I. Datan käsittely. Jyri Lehtinen. kevät Helsingin yliopisto, Fysiikan laitos
 Datan käsittely Helsingin yliopisto, Fysiikan laitos kevät 2013 3. Datan käsittely Luennon sisältö: Havaintovirheet tähtitieteessä Korrelaatio Funktion sovitus Aikasarja-analyysi 3.1 Havaintovirheet Satunnaiset
Datan käsittely Helsingin yliopisto, Fysiikan laitos kevät 2013 3. Datan käsittely Luennon sisältö: Havaintovirheet tähtitieteessä Korrelaatio Funktion sovitus Aikasarja-analyysi 3.1 Havaintovirheet Satunnaiset
J1 (II.6.9) J2 (X.5.5) MATRIISILASKENTA(TFM) MALLIT AV 6
 J2 (X.5.5) MATRIISILASKENTA(TFM) MALLIT AV 6") MATRIISILASKENTA(TFM) MALLIT AV 6 J (II.6.9) Päättele, että avaruusvetorit a, b ja c ovat lineaarisesti riippuvat täsmälleen un vetoreiden virittämän suuntaissärmiön tilavuus =. Tuti tällä riteerillä ovato
MATRIISILASKENTA(TFM) MALLIT AV 6 J (II.6.9) Päättele, että avaruusvetorit a, b ja c ovat lineaarisesti riippuvat täsmälleen un vetoreiden virittämän suuntaissärmiön tilavuus =. Tuti tällä riteerillä ovato
2.8 Mallintaminen ensimmäisen asteen polynomifunktion avulla
 MAB Matemaattisia malleja I.8. Mallintaminen ensimmäisen asteen.8 Mallintaminen ensimmäisen asteen polynomifuntion avulla Tutustutaan mallintamiseen esimerien autta. Esimeri.8. Määritä suoran yhtälö, un
MAB Matemaattisia malleja I.8. Mallintaminen ensimmäisen asteen.8 Mallintaminen ensimmäisen asteen polynomifuntion avulla Tutustutaan mallintamiseen esimerien autta. Esimeri.8. Määritä suoran yhtälö, un
Viikko 2: Ensimmäiset ennustajat Matti Kääriäinen matti.kaariainen@cs.helsinki.fi
 Viikko 2: Ensimmäiset ennustajat Matti Kääriäinen matti.kaariainen@cs.helsinki.fi Exactum C222, 5.-7.11.2008. 1 Tällä viikolla Sisältösuunnitelma: Ennustamisstrategioista Koneoppimismenetelmiä: k-nn (luokittelu
Viikko 2: Ensimmäiset ennustajat Matti Kääriäinen matti.kaariainen@cs.helsinki.fi Exactum C222, 5.-7.11.2008. 1 Tällä viikolla Sisältösuunnitelma: Ennustamisstrategioista Koneoppimismenetelmiä: k-nn (luokittelu
Matemaattinen Analyysi
 Vaasan yliopisto, evät 05 / ORMS00 Matemaattinen Analyysi 6. harjoitus. Approsimoi toisen asteen polynomilla P(x) = b 0 +b x+b x oheisen tauluon muaisia havaintoja. (Teorian löydät opetusmonisteen sivuilta
Vaasan yliopisto, evät 05 / ORMS00 Matemaattinen Analyysi 6. harjoitus. Approsimoi toisen asteen polynomilla P(x) = b 0 +b x+b x oheisen tauluon muaisia havaintoja. (Teorian löydät opetusmonisteen sivuilta
Harjoitus 3: Regressiomallit (Matlab)
") Harjoitus 3: Regressiomallit (Matlab) SCI-C0200 Fysiikan ja matematiikan menetelmien studio SCI-C0200 Fysiikan ja matematiikan menetelmien studio 1 Harjoituksen aiheita Pienimmän neliösumman menetelmä
Harjoitus 3: Regressiomallit (Matlab) SCI-C0200 Fysiikan ja matematiikan menetelmien studio SCI-C0200 Fysiikan ja matematiikan menetelmien studio 1 Harjoituksen aiheita Pienimmän neliösumman menetelmä
Virhearviointi. Fysiikassa on tärkeää tietää tulosten tarkkuus.
 Virhearviointi Fysiikassa on tärkeää tietää tulosten tarkkuus. Virhelajit A. Tilastolliset virheet= satunnaisvirheet, joita voi arvioida tilastollisin menetelmin B. Systemaattiset virheet = virheet, joita
Virhearviointi Fysiikassa on tärkeää tietää tulosten tarkkuus. Virhelajit A. Tilastolliset virheet= satunnaisvirheet, joita voi arvioida tilastollisin menetelmin B. Systemaattiset virheet = virheet, joita
Vastepintamenetelmä. Vilkkumaa / Kuusinen 1
 Vastepintamenetelmä Vilkkumaa / Kuusinen 1 Motivointi Varianssianalyysissa tutkitaan tekijöiden vaikutusta vasteeseen siten, että tekijöiden tasot on ennalta valittu. - Esim. tutkitaan kemiallisen prosessin
Vastepintamenetelmä Vilkkumaa / Kuusinen 1 Motivointi Varianssianalyysissa tutkitaan tekijöiden vaikutusta vasteeseen siten, että tekijöiden tasot on ennalta valittu. - Esim. tutkitaan kemiallisen prosessin
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio. Mat Systeemien Identifiointi. 4. harjoitus
 TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2.4129 Systeemien Identifiointi 4. harjoitus 1. a) Laske valkoisen kohinan spektraalitiheys. b) Tarkastellaan ARMA-prosessia C(q 1 )y = D(q 1 )e,
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2.4129 Systeemien Identifiointi 4. harjoitus 1. a) Laske valkoisen kohinan spektraalitiheys. b) Tarkastellaan ARMA-prosessia C(q 1 )y = D(q 1 )e,
1. YKSISUUNTAINEN VARIANSSIANALYYSI: AINEISTON ESITYSMUODOT
 imat-2.104 Tilastollisen analyysin perusteet / Tehtävät Aiheet: Avainsanat: Ysisuuntainen varianssianalyysi Bartlettin testi, Bonferronin menetelmä, F-testi, Jäännösneliösumma, χ 2 -testi, Koonaisesiarvo,
imat-2.104 Tilastollisen analyysin perusteet / Tehtävät Aiheet: Avainsanat: Ysisuuntainen varianssianalyysi Bartlettin testi, Bonferronin menetelmä, F-testi, Jäännösneliösumma, χ 2 -testi, Koonaisesiarvo,
ARMA(p, q)-prosessin tapauksessa maksimikohdan määrääminen on moniulotteinen epälineaarinen optimointiongelma.
-prosessin tapauksessa maksimikohdan määrääminen on moniulotteinen epälineaarinen optimointiongelma.") missä µ = c φ ja C j,k = Γj k) = σ 2 φj k φ 2. ARMAp, q)-prosessin tapauksessa maksimikohdan määrääminen on moniulotteinen epälineaarinen optimointiongelma. Käytännösssä optimointi tehdään numeerisesti
missä µ = c φ ja C j,k = Γj k) = σ 2 φj k φ 2. ARMAp, q)-prosessin tapauksessa maksimikohdan määrääminen on moniulotteinen epälineaarinen optimointiongelma. Käytännösssä optimointi tehdään numeerisesti
MS-A0501 Todennäköisyyslaskennan ja tilastotieteen peruskurssi
 MS-A0501 Todennäköisyyslaskennan ja tilastotieteen peruskurssi 5B Bayesläiset piste- ja väliestimaatit Lasse Leskelä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto
MS-A0501 Todennäköisyyslaskennan ja tilastotieteen peruskurssi 5B Bayesläiset piste- ja väliestimaatit Lasse Leskelä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto
Mallien avulla yritetään kuvata syy-seuraussuhteita. Perusmallituksessa (tunnetut) syyt selittävät mallitettavia seurauksia
 syyt selittävät mallitettavia seurauksia") Käänteiset tehtävät Mallien avulla yritetään kuvata syy-seuraussuhteita Perusmallituksessa (tunnetut) syyt selittävät mallitettavia seurauksia Useissa käytännön tilanteissa seuraukset tunnetaan tai havaitaan
Käänteiset tehtävät Mallien avulla yritetään kuvata syy-seuraussuhteita Perusmallituksessa (tunnetut) syyt selittävät mallitettavia seurauksia Useissa käytännön tilanteissa seuraukset tunnetaan tai havaitaan
6 Lineaarisen ennustuksen sovelluksia
 6 Lineaarisen ennustusen sovellusia Lineaarisella ennustusella on hyvin täreä asema monessa puheenäsittelyn sovellusessa. Seuraavassa on esitetty esimerejä siitä miten lineaarista ennustusta voidaan hyödyntää.
6 Lineaarisen ennustusen sovellusia Lineaarisella ennustusella on hyvin täreä asema monessa puheenäsittelyn sovellusessa. Seuraavassa on esitetty esimerejä siitä miten lineaarista ennustusta voidaan hyödyntää.
6.5.2 Tapering-menetelmä
 6.5.2 Tapering-menetelmä Määritelmä 6.7. Tapering on spektrin estimointimenetelmä, jossa estimaattori on muotoa f m (ω) = 1 m ( ) k w 2π m Γ(k)e ikω, k= m missä Γ on otosautokovarianssifunktio ja ikkunafunktio
6.5.2 Tapering-menetelmä Määritelmä 6.7. Tapering on spektrin estimointimenetelmä, jossa estimaattori on muotoa f m (ω) = 1 m ( ) k w 2π m Γ(k)e ikω, k= m missä Γ on otosautokovarianssifunktio ja ikkunafunktio
4.0.2 Kuinka hyvä ennuste on?
 Luonteva ennuste on käyttää yhtälöä (4.0.1), jolloin estimaattori on muotoa X t = c + φ 1 X t 1 + + φ p X t p ja estimointivirheen varianssi on σ 2. X t }{{} todellinen arvo Xt }{{} esimaattori = ε t Esimerkki
Luonteva ennuste on käyttää yhtälöä (4.0.1), jolloin estimaattori on muotoa X t = c + φ 1 X t 1 + + φ p X t p ja estimointivirheen varianssi on σ 2. X t }{{} todellinen arvo Xt }{{} esimaattori = ε t Esimerkki
Inversio-ongelmien laskennallinen peruskurssi Luento 7 8
 Inversio-ongelmien laskennallinen peruskurssi Luento 7 8 Kevät 2011 1 Iteratiivisista menetelmistä Tähän mennessä on tarkasteltu niin sanottuja suoria menetelmiä, joissa (likimääräinen) ratkaisu saadaan
Inversio-ongelmien laskennallinen peruskurssi Luento 7 8 Kevät 2011 1 Iteratiivisista menetelmistä Tähän mennessä on tarkasteltu niin sanottuja suoria menetelmiä, joissa (likimääräinen) ratkaisu saadaan
Osa IX. Z muunnos. Johdanto Diskreetit funktiot
 Osa IX Z muunnos A.Rasila, J.v.Pfaler () Mat-.33 Matematiikan peruskurssi KP3-i 9. lokakuuta 2007 298 / 322 A.Rasila, J.v.Pfaler () Mat-.33 Matematiikan peruskurssi KP3-i 9. lokakuuta 2007 299 / 322 Johdanto
Osa IX Z muunnos A.Rasila, J.v.Pfaler () Mat-.33 Matematiikan peruskurssi KP3-i 9. lokakuuta 2007 298 / 322 A.Rasila, J.v.Pfaler () Mat-.33 Matematiikan peruskurssi KP3-i 9. lokakuuta 2007 299 / 322 Johdanto
Elektroniikka, kierros 3
 Elektroniikka, kierros 3 1. a) Johda kuvan 1 esittämän takaisinkytketyn systeemin suljetun silmukan vahvistuksen f lauseke. b) Osoita, että kun silmukkavahvistus β 1, niin suljetun silmukan vahvistus f
Elektroniikka, kierros 3 1. a) Johda kuvan 1 esittämän takaisinkytketyn systeemin suljetun silmukan vahvistuksen f lauseke. b) Osoita, että kun silmukkavahvistus β 1, niin suljetun silmukan vahvistus f
Estimointi populaation tuntemattoman parametrin arviointia otossuureen avulla Otossuure satunnaisotoksen avulla määritelty funktio
 17.11.2015/1 MTTTP5, luento 17.11.2015 Luku 5 Parametrien estimointi 5.1 Piste-estimointi Estimointi populaation tuntemattoman parametrin arviointia otossuureen avulla Otossuure satunnaisotoksen avulla
17.11.2015/1 MTTTP5, luento 17.11.2015 Luku 5 Parametrien estimointi 5.1 Piste-estimointi Estimointi populaation tuntemattoman parametrin arviointia otossuureen avulla Otossuure satunnaisotoksen avulla
1 Rajoittamaton optimointi
 Taloustieteen matemaattiset menetelmät 7 materiaali 5 Rajoittamaton optimointi Yhden muuttujan tapaus f R! R Muistutetaan mieleen maksimin määritelmä. Funktiolla f on maksimi pisteessä x jos kaikille y
Taloustieteen matemaattiset menetelmät 7 materiaali 5 Rajoittamaton optimointi Yhden muuttujan tapaus f R! R Muistutetaan mieleen maksimin määritelmä. Funktiolla f on maksimi pisteessä x jos kaikille y
Mat Tilastollisen analyysin perusteet, kevät 2007
 Mat-.104 Tilastollisen analyysin perusteet, kevät 007 8. luento: Usean selittäjän lineaarinen regressiomalli Kai Virtanen 1 Usean selittäjän lineaarinen regressiomalli Selitettävän muuttujan havaittujen
Mat-.104 Tilastollisen analyysin perusteet, kevät 007 8. luento: Usean selittäjän lineaarinen regressiomalli Kai Virtanen 1 Usean selittäjän lineaarinen regressiomalli Selitettävän muuttujan havaittujen
Sovellettu todennäköisyyslaskenta B
 Sovellettu todennäköisyyslaskenta B Antti Rasila 30. marraskuuta 2007 Antti Rasila () TodB 30. marraskuuta 2007 1 / 19 1 Lineaarinen regressiomalli ja suurimman uskottavuuden menetelmä Minimin löytäminen
Sovellettu todennäköisyyslaskenta B Antti Rasila 30. marraskuuta 2007 Antti Rasila () TodB 30. marraskuuta 2007 1 / 19 1 Lineaarinen regressiomalli ja suurimman uskottavuuden menetelmä Minimin löytäminen
031021P Tilastomatematiikka (5 op) kertausta 2. vk:een
 kertausta 2. vk:een") 031021P Tilastomatematiikka (5 op) kertausta 2. vk:een Jukka Kemppainen Mathematics Division 2. välikokeeseen Toinen välikoe on la 5.4.2014 klo. 9.00-12.00 saleissa L1,L3 Koealue: luentojen luvut 7-11
031021P Tilastomatematiikka (5 op) kertausta 2. vk:een Jukka Kemppainen Mathematics Division 2. välikokeeseen Toinen välikoe on la 5.4.2014 klo. 9.00-12.00 saleissa L1,L3 Koealue: luentojen luvut 7-11
Dynaamiset regressiomallit
 MS-C2128 Ennustaminen ja Aikasarja-analyysi, Lauri Viitasaari Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Syksy 2016 Tilastolliset aikasarjat voidaan jakaa kahteen
MS-C2128 Ennustaminen ja Aikasarja-analyysi, Lauri Viitasaari Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Syksy 2016 Tilastolliset aikasarjat voidaan jakaa kahteen
Esim Brand lkm keskiarvo keskihajonta A ,28 5,977 B ,06 3,866 C ,95 4,501
 Esim. 2.1.1. Brand lkm keskiarvo keskihajonta A 10 251,28 5,977 B 10 261,06 3,866 C 10 269,95 4,501 y = 260, 76, n = 30 SS 1 = (n 1 1)s 2 1 = (10 1)5, 977 2 321, 52 SS 2 = (n 2 1)s 2 2 = (10 1)3, 8662
Esim. 2.1.1. Brand lkm keskiarvo keskihajonta A 10 251,28 5,977 B 10 261,06 3,866 C 10 269,95 4,501 y = 260, 76, n = 30 SS 1 = (n 1 1)s 2 1 = (10 1)5, 977 2 321, 52 SS 2 = (n 2 1)s 2 2 = (10 1)3, 8662
xi = yi = 586 Korrelaatiokerroin r: SS xy = x i y i ( x i ) ( y i )/n = SS xx = x 2 i ( x i ) 2 /n =
 ( y i )/n = SS xx = x 2 i ( x i ) 2 /n =") 1. Tutkitaan paperin ominaispainon X(kg/dm 3 ) ja puhkaisulujuuden Y (m 2 ) välistä korrelaatiota. Tiettyä laatua olevasta paperierästä on otettu satunnaisesti 10 arkkia ja määritetty jokaisesta arkista
1. Tutkitaan paperin ominaispainon X(kg/dm 3 ) ja puhkaisulujuuden Y (m 2 ) välistä korrelaatiota. Tiettyä laatua olevasta paperierästä on otettu satunnaisesti 10 arkkia ja määritetty jokaisesta arkista
VARIANSSIANALYYSI ANALYSIS OF VARIANCE
 VARIANSSIANALYYSI ANALYSIS OF VARIANCE 1 Suomalaisten aikuisten pituusjakauma:.8.7.6.5.4.3.2.1 14 15 16 17 18 19 2 21 Jakauma ei ole normaali, sen olettaminen sellaiseksi johtaa virheellisiin päätelmiin.
VARIANSSIANALYYSI ANALYSIS OF VARIANCE 1 Suomalaisten aikuisten pituusjakauma:.8.7.6.5.4.3.2.1 14 15 16 17 18 19 2 21 Jakauma ei ole normaali, sen olettaminen sellaiseksi johtaa virheellisiin päätelmiin.