Level Set -menetelmä impedanssitomografiassa
|
|
|
- Sami Korhonen
- 7 vuotta sitten
- Katselukertoja:
Transkriptio
1 Level Set -menetelmä impedanssitomografiassa Antti Voss Filosofian maisterin tutkielma Fysiikan koulutusohjelma Itä-Suomen yliopisto, Sovelletun fysiikan laitos
2 ITÄ-SUOMEN YLIOPISTO, Luonnontieteiden ja metsätieteiden tiedekunta Fysiikan koulutusohjelma, laskennallinen ja teknillinen fysiikka Antti Voss Filosofian maisterin tutkielma, 59 sivua Tutkielman ohjaajat: Professori Marko Vauhkonen Apulaisprofessori Ville Kolehmainen kesäkuu 2014
3 Tiivistelmä Impedanssitomografiassa (Electrical Impedance Tomography, EIT) kuvannettavaan kohteeseen syötetään heikkoa vaihtovirtaa kohteen reunoille kiinnitettyjen elektrodien kautta. Virransyötön seurauksena syntyvät jännitteet mitataan käyttäen samoja elekrodeja ja kohteen sisäinen johtavuusjakauma voidaan rekonstruoida näiden reunalta tehtyjen jännitemittausten perusteella. Johtavuusjakauman rekonstruoiminen on matemaattisesti epälineaarinen ja huonostiasetettu käänteisongelma. Tässä tutkielmassa impedanssitomografian rekonstruktio-ongelman ratkaisemiseksi sovelletaan tasa-arvojoukkojen menetelmää eli niin kutsuttua level set - menetelmää. Rekonstruktio-ongelman ratkaisu perustuu yleiseen Tikhonov regularisointimenetelmään. Tutkielman lähestymistavassa pääpiirre on, että kohteen johtavuus oletetaan paloittain vakioksi sekä eri johtavuuksien alueet ja niiden väliset rajapinnat esitetään level set -formuloinnin avulla. Numeeriset testit osoittavat, että level set -lähestymistavalla kohteessa olevien geometrialtaan hyvinkin monimutkaisten epähomogeenisuuksien paikat ja muodot saadaan paikannettua hyvällä tarkkuudella. Myös eri alueiden johtavuudet voidaan estimoida menetelmän avulla tarkasti. Menetelmä on melko riippumaton asetettavasta alkuarvauksesta ja se sietää kohtuullisen hyvin häiriötä mittausdatassa. Avainsanat: Tasa-arvojoukkojen (Level Set) menetelmä, Impedanssitomografia, Täydellinen elektrodimalli (CEM), Tikhonov regularisointi, Äärellisten elementtien menetelmä (FEM), Gauss-Newton algoritmi
4 LYHENTEET EIT LS CEM FEM Impedanssitomografia Pienimmän neliösumman menetelmä Täydellinen elekrodimalli Äärellisten elementtien menetelmä
5 SYMBOLIT Ω Kuvattava kohde Ω Kuvattavan kohteen reuna e l D B E H ρ p J J s J o ɛ Elektrodi l Sähkövuon tiheys Magneettinen induktio Sähkökenttä Magneettikenttä Varaustiheys Virrantiheys Lähdevirta Ohminen virta Sähköinen permittiivisyys µ Magneettinen permeabiliteetti σ Sähköjohtavuus I l z l U l H 1 (Ω) Q h u h U h φ Λ Γ d(x) H(x) δ(x) ɛ 1, ɛ 2 Elektrodille l syötettävä virta Elektrodin l ja kohteen välinen kontakti-impedanssi Elektrodilla l mitattu jännite Hilbert-avaruus Avaruuden H 1 (Ω) äärellisulotteinen aliavaruus FEM-approksimaatio kohteen potentiaalijakaumalle FEM-approksimaatio elektrodijännitteille Level set -funktio Level set -funktion määrittämän alue Level set -funktion nollakäyrä Etäisyysfunktio Askelfunktio Deltafunktio Askel- ja deltafunktion approksimaatioiden sileysparametrit
6 Sisältö 1 Johdanto 5 2 Impedanssitomografia (EIT) Matemaattinen malli Täydellinen elektrodimalli Käänteisongelma Jacobin matriisin laskeminen Level Set- menetelmä Level set -funktio ja Hamilton-Jacobi yhtälöt Merkki-etäisyysfunktio Materiaalit ja menetelmät Level Set-lähestymistapa ja EIT Kaksi johtavuutta Kolme tai neljä johtavuutta Askelfunktion ja deltafunktion approksimaatiot Gauss-Newton algoritmi ja Matlab implementointi Hilat Tulokset D Yksi level set -funktio Kaksi level set -funktiota D
7 6 Yhteenveto & Pohdinta 44 Liitteet 47 Viitteet 51
8 Luku 1 Johdanto Impedanssitomografia (Electrical Impedance Tomography, EIT) on kuvantamismodaliteetti sähköä johtaville kohteille. Kuvantamismenetelmän idea on, että kohteen reunalle kiinnitetyillä elektrodeilla syötetään pienitaajuista vaihtovirtaa kuvannettavaan kohteeseen ja sen seurauksena syntyvät jännitteet elektrodeilla mitataan. Kohteen sisäinen johtavuus- tai resistiivisyysjakauma voidaan rekonstruoida reunalta tehtyjen ei-invasiivisten jännitemittausten perusteella. Rekonstruoidun johtavuusjakauman avulla saadaan merkittävää tietoa kohteen rakenteellisista ominaisuuksista ja voidaan esimerkiksi tutkia kehon funktionaalisia prosesseja. Impedanssitomografialla onkin lukuisia sovelluskohteita monilla tieteenaloilla kuten esimerkiksi lääketieteessä [17, 1, 54, 2, 33], teollisuudessa [34, 22, 36, 48, 18, 39, 40], geologiassa [27, 4, 19, 37, 12, 46] ja rakenteiden kunnon tutkimisessa [13, 5, 23]. Matemaattisessa mielessä johtavuuden (tai resistiivisyyden) rekonstruktioongelma on huonostiasetettu epälineaarinen käänteisongelma. Huonostiasetetulla ongelmalla tarkoitetaan, että pienetkin virheet esimerkiksi mittausdatassa voivat aiheuttaa suuria virheitä lopullisessa ratkaisussa/estimaatissa. Matemaattisen taustan EIT:n käänteisongelmalle kehitti Alberto Calderón [7] 1980-luvun alussa, jonka jälkeen on kehitetty monenlaisia lähestymistapoja rekonstruktio-ongelman ratkaisemiseksi. Yksi erittäin paljon käytetty tapa on käsitellä käänteisongelmaa epälineaarisena LS-ongelmana lisättynä regularisointitermillä. Tässä lähestymistavassa etsitään johtavuudelle estimaattia, joka minimoi mitattujen jännitteiden ja suoran ongelman avulla laskettujen jännitteiden erotuksen normin neliön ja regularisointifunktionaalin summan. Tässä tutkielmassa kuvannettavan kohteen sisällä olevien mahdollisten epäho- 5
9 mogeenisuuksien muodot, paikat ja johtavuudet estimoidaan soveltamalla tasaarvojoukkojen eli niin sanottua level set -menetelmää. Level set -menetelmä on tehokas ja mukautuva numeerinen menetelmä muotojen ja pintojen muutosten seuraamiseen. Alkuperäisen level set -idean kehittivät Osher ja Sethian [32] 1980-luvun lopulla ja sittemmin siitä on tullut suosittu työkalu monilla tutkimuksen aloilla esimerkiksi kuvankäsittelyssä, optimoinnissa ja virtauslaskennassa [14, 28]. Level set -menetelmien suuri etu numeerisessa laskennassa on, ettei kohteiden pintoja tai reunoja tarvitse parametrisoida missään vaiheessa. Level set -ideaa on käytetty onnistuneesti myös erilaisten käänteisongelmien ratkaisemiseen [41, 6, 15]. EIT:n rekonstruktio-ongelma on myös ratkaistu soveltamalla level set -menetelmää [11, 42, 43, 44, 24, 38]. Tämän tutkielman lähestymistapa EIT:n käänteisongelman ratkaisuun level set -menetelmällä on hyvin samanlainen kuin edellä mainituissa viitteissä. Lähestymistavan pääpiirre on esittää kohteen johtavuus ja kohteessa olevien mahdollisten eri johtavuuksien väliset rajapinnat level set -formuloinnin avulla. Johtavuus kohteessa oletetaan olevan paloittain vakio funktio. Tämän jälkeen kun johtavuudelle on olemassa esitys, niin impedanssitomografian käänteisongelma ratkaistaan epälineaarisena LS-ongelmana käyttäen yleistettyä Tikhonov regularisointia. Tutkielman tavoitteet ja sisältö Tämän tutkielman päämäärä on tutkia ja tarkastella level set -menetelmän toimivuutta EIT:n rekonstruktio-ongelman ratkaisussa sekä 2D- että 3D-geometriassa. Menetelmää testataan monissa erilaisissa tilanteissa. Rekonstruktioita tehdään monille geometrialtaan erilaisille kohteille, jotka sisältävät kahta tai kolmea eri johtavuuden arvoa. Menetelmää testataan tilanteissa, joissa johtavuuksien arvot tunnetaan tai niitä estimoidaan samanaikaisesti kohteen muodon estimoinnin yhteydessä. Myös menetelmän sietoa mittauskohinalle testataan. Numeerisissa testeissä tehtävät rekonstruktiot perustuvat simulointien avulla laskettuun dataan. Tutkielma on jaettu kuuteen eri kappaleeseen. Kappaleessa 2 on esitetty EIT:n perusperiaate ja siihen liittyvä suora ongelma ja käänteisongelma. Kappaleessa 3 on käyty läpi level set -menetelmän perusperiaatteita. Kappaleessa 4 on johdettu level set -menetelmän matemaattinen formulointi EIT:n käänteisongelman ratkaisussa sekä
10 esitetty kaikki numeeriset testit yksityiskohtaisesti. Tulokset on esitetty kappaleessa 5 ja lopuksi viimeisessä kappaleessa on lyhyt yhteenveto tutkielmasta ja kommentit saaduista tuloksista.
11 Luku 2 Impedanssitomografia (EIT) Impedanssitomografia on kuvantamismodaliteetti, jossa kuvattavan kohteen sisäinen johtavuusjakauma rekonstruoidaan kohteen reunoilta tehtyjen jännitemittausten perusteella. Tyypillinen mittausasetelma on esitetty kuvassa (2.1). Joukko elektrodeja {e l } on kiinnitetty kuvattavan kohteen Ω reunalle Ω. Elektrodien kautta kohteeseen syötetään sähkövirtaa ja syntyvät jännitteet mitataan käyttäen samoja elektrodeja. Yleensä syötettävät sähkövirrat ovat matalataajuista (10-100kHZ) ja pieniamplitudista (1-5mA) vaihtovirtaa. Kuva 2.1: Esimerkki mittausasetelmasta. EIT kuuluu diffuuseihin tomografiamodaliteetteihin, kun sähkövirta johdetaan 8
12 kohteeseen se leviää diffuusisti koko kohteen tilavuuteen. Tämän seurauksena tomografiakuvan rekonstruointi on hankalampaa kuin esimerkiksi röntgentomografiassa, jossa röntgensäteet kulkevat suoraan ja yhden mittauksen informaatio tulee hyvin rajatulta alueelta. Sähkönjohtavuusjakauman estimointi reunalta tehtyjen mittausten perusteella on epälineaarinen, huonostiasetettu käänteisongelma. Tämä on tyypillinen piirre diffuuseille tomografioille. Käytännön määritelmä huonostiasetetulle käänteisongelmalle on, että hyvinkin pienet virheet mittauksissa ja matemaattisissa malleissa voivat aiheuttaa suuria virheitä ratkaisussa. Toisin sanoen tämä tarkoittaa sitä, että klassiset (LS) ratkaisut ovat epästabiileja ja/tai ei-yksikäsitteisiä. Sähkönjohtavuusjakauman rekonstruointiin on olemassa monenlaisia lähestymistapoja, mutta yleisin tapa on rakentaa matemaattinen malli (ns. elektrodimalli) suoralle ongelmalle. Elektrodimallin avulla elektrodijännitteet reunalla voidaan laskea, kun syötettävät virrat ja kohteen sähkönjohtavuus tunnetaan. Perinteinen lähestymistapa ratkaista EIT:n käänteisongelma elektrodimalliin perustuen on Tikhonov regularisointi [49, 51]. Tikhonov regularisoinnissa klassiseen epälineaariseen LS-ongelmaan lisätään sakkofunktionaali, jolloin alkuperäinen huonostiasetettu ongelma korvataan hyvin käyttäytyvällä approksimaatiolla, jonka ratkaisu on (toivottavasti) lähellä alkuperäisen ongelman ratkaisua. 2.1 Matemaattinen malli EIT:n käänteisongelma on ratkaista kohteen sisäinen johtavuusjakauma kohteen reunalta tehtyjen jännitemittausten perusteella. Käänteisongelman ratkaisemiseksi tarvitaan matemaattinen malli (t.s suora malli), jonka avulla lasketaan jännitteet reunalla, kun syötettävät sähkövirrat ja johtavuusjakauma tiedetään. Toistaiseksi tarkin malli on niin sanottu täydellinen elektrodimalli (Complete Electrode Model, CEM)[45, 10]. Seuraavaksi esitetty täydellisen elektrodimallin johtaminen ja numeerinen ratkaisu perustuu pääosin viitteisiin [50, 26, 52, 25, 45, 10, 9] Täydellinen elektrodimalli Sähkömagneettisten kenttien käyttäytyminen kohteen Ω sisällä voidaan mallintaa Maxwellin yhtälöillä
13 D = ρ c (2.1) B = 0 (2.2) E = B t (2.3) H = J + D t, (2.4) missä on roottorioperaattori, on divergenssioperaattori, t on osittaisderivaatta ajan suhteen, E on sähkökenttä, H on magneettikenttä, B on magneettinen induktio, D on sähkövuon tiheys (electric displacement), ρ c on varaustiheys ja J on virrantiheys, J = J s + J o = lähdevirta + ohminen virta. Jos oletetaan, että kohde Ω on lineaarinen ja isotrooppinen väliaine, voidaan kirjoittaa D = ɛe (2.5) B = µh (2.6) J = σe, (2.7) missä ɛ on permittiivisyys, µ on permeabiliteetti ja σ = σ(x),x Ω, on johtavuus. EIT:ssä tehdään yleensä ns. kvasi-staattinen approksimaatio, joka tarkoittaa aikariippuvuuden huomiotta jättämistä, vaikkakin käytetään vaihtovirtaa. Kvasistaattinen approksimaatio on pätevä, jos vaihtovirran taajuus on tarpeeksi pieni. Approksimaation johdosta aikaderivaatat yhtälöissä (2.3) ja (2.4) ovat nollia. Lisäksi lähdevirta J s kohteen sisällä voidaan olettaa nollaksi, koska J s = 0 EIT:ssä käytettävillä vaihtovirran taajuuksilla. Nyt koska E = 0 niin on olemassa sähköinen potentiaali u siten että E = u. (2.8) Ottamalla divergenssi yhtälöstä (2.4) ja hyödyntämällä yhtälöitä (2.7) ja (2.8) saadaan yhtälö, joka mallintaa sähköiset ominaisuudet kohteen sisällä σ u = 0, u Ω. (2.9)
14 Yhtälö (2.9) on malli sähköiselle potentiaalille vain kohteen sisällä. Jotta saataisiin tarkka matemaattinen malli koko ongelmalle, myös reunaehdot täytyy määrittää. Reunaehdot Reunaehdot sähköiselle potentiaalille täydellisessä elektrodimallissa ovat seuraavat u + z l σ u n = U l, x e l, l = 1, 2,..., L (2.10) σ u n ds = I l, x e l, l = 1, 2,..., L (2.11) e l σ u n = 0, x Ω\ L l=1 e l, (2.12) missä I l on elektrodille e l syötetty virta, L on elektrodien lukumäärä, z l on elektrodin e l ja kohteen välinen kontakti-impedanssi ja U l on elektrodilla e l mitattu jännite. Yhtälö (2.10) ottaa huomioon oikosulku-ilmiön elektrodeilla (ts. jännite U l on vakio koko elektrodilla e l ) sekä kontakti-impedansseista z l johtuvan ylimääräisen jännitehäviön elektrodeilla. Kaksi alinta ehtoa (2.11) ja (2.12) tarkoittavat käytännössä, että virtaa syötetään vain elektrodeilta e l. Yksityiskohtaisempi johtaminen reunaehdoille on esitetty esimerkiksi viitteissä [52, 50, 10]. Edellisten reunaehtojen lisäksi myös kaksi ehtoa syötettävälle virralle ja mitattaville jännitteille on oltava voimassa, jotta suoran ongelman ratkaisu olisi olemassa ja se olisi yksikäsitteinen [45, 35]. Nämä ehdot ovat L I l = 0 (2.13) l=1 L U l = 0. (2.14) l=1 Ylempi ehto tarkoittaa, että varauksen säilymislain pitää olla voimassa ja alempi yhtälö vaatii, että potentiaalimittauksille täytyy valita jokin referenssipiste. Kokonaisuudessaan täydellinen elekrodimalli koostuu yhtälöistä (2.9)-(2.14). Täydellisen elektrodimallin ratkaisun olemassaolo ja yksikäsitteisyys on todistettu viitteessä [45]. Suoran ongelman numeerinen ratkaisu Täydellinen elektrodimalli (CEM) liittää yhteen elektrodijännitteet U l, syötettävät virrat I l ja sähkönjohtavuusjakauman σ. EIT:n suora ongelma on ratkaista kohteen
15 sisäinen sähköinen potentiaali u ja elektrodipotentiaalit U l, kun syötettävät virrat ja johtavuusjakauma tiedetään. Täydellisen elektrodimallin (suoran ongelman) analyyttinen ratkaisu on olemassa vain hyvin yksinkertaisille geometrioille sen monimutkaisten reunaehtojen takia. Tämän takia EIT:n suoran ongelman ratkaisemiseksi käytetään numeerisia menetelmiä. Osittaisdifferentiaaliyhtälöiden ratkaisemiseksi on olemassa monia eri numeerisia menetelmiä, mutta tässä tutkielmassa EIT:n suoran ongelman ratkaisussa käytetään äärellisten elementtien menetelmää (Finite Element Method, FEM), koska se soveltuu hyvin osittaisdifferentiaaliyhtälöiden ratkaisuun monimutkaisissa geometrioissa ja hankalissa reunaehdoissa [3, 20, 29]. Ensimmäinen askel täydellisen elektrodimallin FEM-ratkaisussa on kirjoittaa ratkaistava osittaisdifferentiaaliyhtälö ja reunaehdot niin sanotussa variationaalimuodossa (ts. heikossa muodossa). Tämän jälkeen variationaaliongelman ratkaisulle etsitään äärellisdimensionaalinen approksimaatio. Täydellisen elektrodimallin heikon muodon johtaminen yksityiskohtaisesti on esitetty viitteessä [45]. Täydellisen elektrodimallin variationaalimuodolla on heikko ratkaisu (u, V ) L B((u, U), (v, V )) = I l V l, (2.15) l=1 missä v H 1 (Ω) ja V R L. Yhtälön (2.15) vasenta puolta B((u, U), (v, V )) = Ω L σ u v dx + (u U l )(v V l ) ds (2.16) l=1 e l kutsutaan bilineaarimuodoksi B : (H 1 (Ω) R L ) (H 1 (Ω) R L ) R. Äärellistä ratkaisua variationaalimuodolle (2.15) etsittäessä kohde Ω täytyy ensin diskretisoida ja jakaa pieniin elementteihin. Tämän jälkeen tuntemattomille funktioille (u ja U) kirjoitetaan äärellisdimensionaaliset approksimaatiot. Potentiaalijakaumaa u kohteen sisällä approksimoidaan äärellisellä summalla ja samoin myös jännitteitä U elektrodeilla N n u h = α i ϕ i (2.17) i=1
16 L 1 U h = β j n j, (2.18) j=1 missä funktiot ϕ i muodostavat kannan äärellisulotteiselle aliavaruudelle Q h H 1 (Ω) ja kantavektorit n j R L valitaan esimerkiksi n 1 = (1, 1, 0,..., 0) T, n 2 = (1, 0, 1,..., 0) T,..., n L 1 = (1, 0,..., 1) T, jolloin ehto (2.14) täyttyy. Approksimaatioissa (2.17) ja (2.18) N n on solmupisteiden määrä elementtikannassa, L on elektrodien määrä ja kertoimet α i ja β j ovat tuntemattomia, jotka täytyy määrittää. Nyt hyödyntämällä äärellisten elementtien teoriaa [3] ja sijoittamalla approksimaatiot (2.17) ja (2.18) variationaalimuotoon (2.15) saadaan matriisiyhtälö Ab = f, (2.19) missä vektori b R Nn+L 1 on muotoa b = α β, (2.20) missä α R Nn ja β R L 1. Datavektori f on muotoa 0 f = = 0Ĩ Ll=1 I l (n j ) l, (2.21) missä 0 = (0,..., 0) T R Nn ja Ĩ = (I 1 I 2, I 1 I 3,..., I 1 I L ) T R L 1. Matriisi A R (Nn+L 1) (Nn+L 1) on harva blokkimatriisi ja se on muotoa missä osamatriisit ovat muotoa A = B C C T D, (2.22) L 1 B(i, j) = σ ϕ i ϕ j dx + ϕ i ϕ j ds, Ω l=1 z l e l i, j = 1, 2,..., N n (2.23)
17 C(i, j) = 1 ϕ i ds 1 z 1 e 1 z j+1 e j+1 ϕ i ds, i = 1, 2,..., N n, j = 1, 2,..., L 1 (2.24) D(i, j) = = L 1 (n i ) l (n j ) l ds l=1 z l e l e 1 z 1, i j e 1 z 1 + e j+1 z j+1, i = j, i, j = 1, 2,..., L 1. (2.25) Ratkaisemalla yhtälöstä (2.19) b = A 1 f saadaan suoran ongelman approksimatiivinen ratkaisu. Ensimmäisten kertoimien α i, i = 1, 2,..., N n avulla saadaan laskettua sisäinen potentiaalijakauma u h solmupisteissä ja jännitteet U h elektrodeilla saadaan määritettyä lopuista β j, j = 1, 2,..., L 1 kertoimista. Potentiaalit elektrodeilla saadaan laskettua kertoimien β ja yhtälön (2.18) avulla β 1 β 2 β L 1 β L 1 U h 0 β 2 0 = β j n j = j= β L 1 L 1 l=1 β l β 1 β 2 = β 3. β L 1 (2.26) Tämä voidaan kirjoittaa lyhyesti matriisimuodossa U h = Cβ, (2.27)
18 missä β = (β 1, β 2,..., β L 1 ) T ja C R L (L 1) on matriisi, joka on muotoa C = (2.28) Käytännössä varsinaiset EIT-mittaukset koostuvat jännitteistä, jotka on mitattu elektrodiparien välillä U i = Ul h - Uk h, i = 1, 2,..., m, missä m mittausten lukumäärä. Esimerkiksi jännitemittaukset voisivat muodostua potentiaalieroista U 1 = U2 h U1 h, U 2 = U3 h U2 h, jne. Suoran ongelman ratkaisuna saaduista elektrodijännitteistä U h aitoja mittauksia vastaavat potentiaalierot voidaan määrittää seuraavasti U = MU h = MCβ, (2.29) missä M R m L on mittausmatriisi (measurement pattern), joka kuvaa miltä elektrodeilta jännitteet on mitattu. 2.2 Käänteisongelma EIT:n käänteisongelma on määrittää johtavuusjakauma σ kohteen sisällä, kun syötettävät virrat ja niitä vastaavat mitatut jännitteet tiedetään. Fysikaalisen mallinnuksen (suora malli) ja FEM-diskretoinnin avulla voidaan kirjoittaa EIT-havaintomalli V = U(σ; z, I) + e, (2.30) missä e on havaintovirhe, V on mitatut jännitteet elektrodeilla ja U(σ; z, I) on diskreetti matemaattinen malli, joka yhdistää johtavuuden σ ja mittaukset V toisiinsa. EIT-rekonstruktiomenetelmiä on olemassa monia erilaisia, mutta yksi yleinen menetelmä on käsitellä EIT:n käänteisongelmaa epälineaarisena LS-ongelmana. Tyypillinen lähestymistapa on käyttää yleistettyä Tikhonov-regularisointia [49, 51], jolloin minimoitava LS-funktionaali on muotoa
19 F (σ) = L 1 (V U(σ)) 2 + αa(σ), (2.31) missä L 1 on painotusmatriisi, α on regularisointiparametri ja A(σ) on regularisointifunktionaali. Useasti regularisointifunktionaali on muotoa A(σ) = L 2 (σ σ ) 2, (2.32) missä L 2 on regularisointimatriisi ja σ on johtavuuden prioriestimaatti, joka voi olla esimerkiksi johtavuuden odotusarvo. Datan riippuvuus johtavuudesta σ on epälineaarinen, joten myös funktionaali (2.31) on epälineaarinen johtavuuden suhteen. Funktionaalin minimoimiseksi ja ratkaisun σ löytämiseksi voidaan käyttää iteratiivisia menetelmiä. Tässä työssä epälineaarisen käänteisongelman ratkaisussa käytetään Gauss-Newton algoritmia, jolloin iteratiivinen algoritmi johtavuusestimaatille ˆσ saadaan seuraavasti ˆσ k+1 = ˆσ k + h k ( J T k W 1 J k + αw 2 ) 1 ( J T k W 1 (V U(σ k )) αw 2 (σ σ ) ), (2.33) missä J k on jännitemittausten Jacobin matriisi sen hetkisen johtavuusestimaatin ˆσ k suhteen, h k on askelpituus, W 1 = L T 1 L 1 ja W 2 = L T 2 L Jacobin matriisin laskeminen Suoran ongelman ratkaisuna saatujen jännitemittausten U Jacobin matriisia johtavuusjakauman suhteen tarvitaan usein iteratiivisissa menetelmissä ja se on muotoa J = ( U σ 1,..., U σ Nn ). (2.34) Lasketut jännitteet elektrodeilla voidaan kirjoittaa U = MU h = MCβ = M Cb, missä b on sama kuin yhtälössä (2.20) ja matriisi C = ( 0 C ), 0 R L Nn. Tällöin lasketut jännitteet U = MCβ = M Cb = Mb ja niiden osittaisderivaatta m:nnen johtavuusparametrin σ m suhteen saadaan U σ m = Mb σ m = M b σ m. (2.35)
20 Termi b σ m voidaan kirjoittaa yhtälön (2.19) avulla muotoon Yhtälön (2.36) oikea puoli voidaan muokata muotoon b = (A 1 f). (2.36) σ m σ m (A 1 f) σ m 1 A = A A 1 1 A f = A b. (2.37) σ m σ m Nyt yhtälöiden (2.36) ja (2.37) avulla osittaisderivaatat (2.35) voidaan kirjoittaa U b = M σ m 1 A = MA b σ m σ m ( (A 1 ) T M ) T T A b = σ m ( = A 1 M ) T T A b σ m = ˆb T A b, (2.38) σ m missä ˆb = A 1 M T. Matriisissa A ainoastaan osamatriisi B riippuu johtavuudesta σ, joten osittaisderivaatta A/ σ m voidaan laskea seuraavasti A = σ m B σ m (2.39) Johtavuudelle voidaan kirjoittaa äärellisulotteinen esitystapa muodossa σ(x) = Tällöin matriisi B/ σ m on muotoa N n k=1 B(i, j) = σ ϕ i ϕ j dx σ m σ m Ω σ = ϕ i ϕ j dx σ m = Ω Ω σ k ϕ k (x). (2.40) ϕ m ϕ i ϕ j dx. (2.41)
21 Luku 3 Level Set- menetelmä Level set -menetelmät yleisesti ovat numeerisia menetelmiä tai tekniikoita, joiden avulla voidaan seurata muuttuvien tai etenevien rajapintojen ja niiden muotojen kehittymistä. Alkuperäisen level set -menetelmän tarkoitus oli analysoida ja seurata etenevien rajapintojen liikettä nopeuskentässä ja sen kehittivät Stanley Osher ja James A. Sethian 1980-luvun lopulla. Viime aikoina level set -menetelmille on kehitetty monia eri sovelluskohteita esimerkiksi optimoinnissa ja kuvankäsittelyssä. [14, 28] 3.1 Level set -funktio ja Hamilton-Jacobi yhtälöt Alkuperäinen idea Osherin ja Sethian [32] kehittämän level set -menetelmän takana on varsin yksinkertainen. Rajapinta Γ ympäröi aluetta Λ ja tavoitteena on analysoida ja laskea tämän rajapinnan muutos tunnetun nopeuskentän v vaikutuksen alaisuudessa. Muutoksen aiheuttava kenttä voi riippua paikasta, ajasta, (raja)pinnan geometriasta (esim. normaalivektorin suunnasta) tai esimerkiksi ulkoisesta fysikaalisesta virtauksesta. Pääidea level set -menetelmässä on määrittää sileä ja vähintään Lipschitz-jatkuva funktio φ(x, t), joka kuvaa rajapinnan Γ implisiittisesti joukoksi, missä funktio menee nollaan eli φ(x, t) = 0. Tämä on ydinidea kaikissa level set - menetelmissä sovelluksista riippumatta [30, 31, 32]. Esimerkki 2D-tilanteessa, missä level set -funktion φ nollataso määrittää alueen Λ xy-tasoon, on esitetty kuvassa (3.1). 18

22 Kuva 3.1: Esimerkki 2D-tapauksesta (a) Level set -funktio φ leikkaa nollatason φ(x, y) = 0 ja (b) Nollataso ja sen määrittämä rajapinta Γ eri kulmasta. Level set -funktiolla voi olla hieman eriäviä määritelmiä riippuen käytettävästä sovelluksesta. Kuitenkin tyypillinen lähestymistapa on määritellä implisiittinen funktio, jolla on seuraavat ominaisuudet [30] φ(x, t) < 0, kun x Λ φ(x, t) > 0, kun x / Λ φ(x, t) = 0, kun x Λ = Γ(x, t) (3.1) Rajapinnan Γ(x, t) seuraamiseen ja kehittymiseen myöhemmillä ajanhetkillä t kun φ(x, t) muuttuu tarvitsee vain siis paikantaa kohdat missä φ(x, t) = 0. Tällä yksinkertaisella idealla on erittäin suuri merkitys numeerisen laskennan kannalta, koska näin topologiset muutokset kuten alueiden Λ hajoaminen ja yhdistyminen ovat hyvin määriteltyjä ja tapahtuvat itsestään menetelmän sisällä. Myöskään minkäänlaista rajapintojen parametrisointia ei tarvita eikä etukäteistietoa mahdollisten alueiden määrästä. [30, 31] Alkuperäisen level set -menetelmän formuloinnissa rajapinnan Γ muutos saadaan aikaan, kun funktion φ arvot muuttuvat nopeuskentän v vaikutuksesta. Tätä funktion φ muutosta voidaan kuvata matemaattisesti osittaisdifferentiaaliyhtälöllä φ t + v φ = 0. (3.2) Nopeuskentän v komponentti funktion φ tasa-arvopinnan normaalin suuntaan voidaan kirjoittaa vektorilaskennan perusteella v N = v φ. Sijoittamalla tämä yhtä- φ löön (3.2) saadaan
23 φ t + v N φ = 0, (3.3) missä on euklidinen normi. Yllä oleva yhtälö on välttämätön, jos halutaan seurata rajapinnan muutosta tunnetun nopeuskentän vaikutuksessa. Molemmat yhtälöt (3.2) ja (3.3) kuuluvat niin sanottuihin Hamilton-Jacobi -yhtälöihin, joilla on erittäin keskeinen rooli level set -menetelmissä. Hamilton-Jacobi -yhtälöt voidaan yleistää muotoon φ t + H(φ x, φ y, φ z ) = 0, (3.4) missä H on Hamiltonin matriisi, joka voi olla sekä paikan että ajan funktio [30, 31]. Viitteissä [30, 31] on esitelty monia erilaisia ja eri tilanteisiin sopivia numeerisia menetelmiä yhtälön (3.4) ratkaisemiseksi. 3.2 Merkki-etäisyysfunktio Level set -funktiosta φ ei ole vielä sanottu muuta kuin, että sen tulisi olla implisiittinen ja jossakin määrin sileä. Seuraavaksi esitellään yksi vaihtoehto level set - funktioksi, merkki-etäisyysfunktio (signed distance function). Merkki-etäisyysfunktio on implisiittinen funktio ja sen on osoitettu käyttäytyvän paremmin kuin minkään muun yhtälön (3.1) toteuttavan funktion kun lasketaan numeerisia approksimaatioita Hamilton-Jacobi -yhtälöille. [30] Level set -funktio φ määritellään merkki-etäisyysfunktion avulla seuraavasti φ(x) = d(x), kun x Λ d(x), kun x / Λ 0, kun x Λ, (3.5) missä d(x) tarkoittaa etäisyysfunktiota, joka on määritelty d(x) = min( x x B ) x B Λ. (3.6) Merkki-etäisyysfunktion käyttöön level set -funktiona liittyy monia muita ominaisuuksia, joita muilla funktiovaihtoehdoilla ei ole [30]. Esimerkiksi
24 φ = 1. (3.7) Numeerista laskentaa suoritettaessa level set -funktion φ alkuarvaus ajautuu lopulta erilleen alkuperäisestä arvostaan eikä se välttämättä enää täytä merkkietäisyysfunktion kriteerejä. Tämä voi aiheuttaa epästabilisuutta ja virhettä lopullisessa ratkaisussa. Tämän takia on suositeltavaa uudelleen alustaa φ aika ajoin takaisin muistuttamaan merkki-etäisyysfunktiota. Näin ollen varmistutaan level set -funktion riittävästä sileydestä ja ratkaisun stabiilisuudesta. [30, 47, 8] Artikkelissa [47] on esitetty yksi tapa, jolla φ voidaan uudelleen alustaa muistuttamaan merkki-etäisyysfunktiota. Uudelleen alustus perustuu yhtälön φ t + S(φ 0)( φ 1) = 0 (3.8) ratkaisuun numeerisesti. Funktio S(φ 0 ) on merkkifunktio, joka saa arvon 1 alueen Λ ulkopuolella, -1 sisäpuolella ja 0 rajapinnalla Γ.
25 Luku 4 Materiaalit ja menetelmät Tämän tutkielman tavoitteena on tutkia level set -menetelmän toimivuutta impedanssitomografian rekonstruktio-ongelman ratkaisussa. Kaikki simuloinnit ja laskenta suoritettiin käyttäen Matlab-ohjelmaa. Tässä luvussa käydään läpi level set - lähestymistapa impedanssitomografiaan sekä simulointien että numeeristen testien yksityiskohdat. 4.1 Level Set-lähestymistapa ja EIT Tässä tutkielmassa impedanssitomografian käänteisongelma ratkaistaan soveltamalla level set -menetelmää. Käytettävä lähestymistapa käänteisongelman ratkaisuun on hyvin samankaltainen kuin viitteissä [8, 11, 43, 44, 16] pienillä eroavaisuuksilla. Pääidea menetelmässä on, että kohteen johtavuus oletetaan paloittain vakioksi ja eri johtavuuksien alueet ja niiden väliset rajapinnat esitetään level set -formuloinnin t.s level set funktioiden φ avulla. Erona tässä tutkielmassa on level set -funktion φ valinta. Level set funktioksi ei valita varsinaisesti merkki-etäisyysfunktiota vaan level set -funktio määritellään seuraavasti c, kun x Λ φ(x) = c, kun x / Λ, (4.1) missä c R + ja se voidaan valita esimerkiksi luvuksi 1. Funktion φ arvojen kehittyessä rajapinta Γ alueiden Λ välillä t.s nollataso φ(x) = 0 määritetään kohtaan, jossa funktion positiiviset arvot muuttuvat negatiivisiksi. Level set -funktion φ reinitalisointi tehdään tarvittaessa ja se toteutetaan asettamalla sen hetkiset negatiiviset arvot arvoon c ja positiiviset arvot arvoon c. 22
26 Seuraavaksi johdetaan level set -lähestymistapa johtavuuden rekonstruktioongelman ratkaisemiseksi, kun kohde sisältää kahta eri johtavuuden omaava materiaalia sekä tilanne, missä eri johtavuuksia voi olla kolme tai neljä. Ongelman ratkaisuun kun eri materiaaleja on kaksi riittää yksi level set -funktio, mutta 3-4 eri materiaalin ratkaisuun tarvitaan kaksi level set -funktiota, jotta kaikki mahdolliset eri alueet saataisiin esitettyä. Yleinen sääntö on, että K määrällä level set -funktioita voidaan esittää 2 K määrä eri alueita, joilla on eri johtavuus tai jokin muu parametrin arvo [8, 16, 53]. Tässä tutkielmassa rajoitutaan tapauksiin, jossa level set -funktioita on yksi tai kaksi Kaksi johtavuutta Oletetaan, että kohde Ω sisältää kahta eri materiaalia Ω 1 ja Ω 2, joiden johtavuudet ovat σ 1 ja σ 2, vastaavassa järjestyksessä. Kun level set -funktio on määritelty, voidaan alueet Ω 1 ja Ω 2 ja niiden välinen rajapinta Γ määrittää sen avulla Ω 1 = {x Ω φ(x) > 0}, Ω 2 = {x Ω φ(x) < 0}, (4.2) Γ = {x Ω φ(x) = 0}. Kuva 4.1: Kohde Ω, joka sisältää kahta eri materiaalia johtavuuksilla σ 1 ja σ 2.
27 Tämä on myös esitetty kuvassa (4.1). Nyt kohteen Ω johtavuus σ(x) voidaan kirjoittaa paloittain vakiona funktiona level set -funktion avulla seuraavasti σ 1, kun φ 0 σ(x) = σ 2, kun φ < 0 missä H(x) on askelfunktio ja se on määritelty = σ 1 H(φ(x)) + σ 2 (1 H(φ(x))), (4.3) 1, kun x 0, H(x) = 0, kun x < 0. (4.4) Kun johtavuudelle σ on olemassa esitys niin muokataan luvussa 2 esitetty yleistetty Tikhonov regularisointifunktionaalin (2.31) minimointi sisältämään level set - lähestymistavan. Minimoitava funktionaali on muotoa F (σ) = F (σ(φ, σ 1, σ 2 )) = L 1 (V U(σ)) 2 + α L 2 (σ σ ) 2. (4.5) Funktionaali (4.5) on johtavuuden σ funktio, mutta σ riippuu edelleen level set - funktiosta φ ja johtavuuksista σ 1 ja σ 2 eli σ(φ, σ 1, σ 2 ). Jotta iteratiivista algoritmia (2.33) voitaisiin käyttää estimoitavien parametrien φ, σ 1 ja σ 2 päivitykseen täytyy ensin laskea kuvauksen U(σ) Jacobin matriisi estimoitavien parametrien suhteen. Kokonaisuudessa Jacobin matriisi on muotoa J tot (σ) = (J φ, J σ1, J σ2 ), (4.6) missä matriisit J φ R m Nn, J σ1 R m 1 ja J σ2 R m 1 lasketaan seuraavasti derivoinnin ketjusääntöä hyödyntäen J φ = U(σ(φ, σ 1, σ 2 )) φ J σ1 = U(σ(φ, σ 1, σ 2 )) = σ 1 J σ2 = U(σ(φ, σ 1, σ 2 )) σ 2 = = U σ σ φ = U σ (σ 1 σ 2 )δ(φ), (4.7) U σ U dx = H(φ) dx, (4.8) σ σ 1 σ Ω Ω U σ σ σ 2 dx = Ω Ω U (1 H(φ)) dx. (4.9) σ
28 Yhtälöiden (4.7)-(4.9) yksityiskohtaisemmat derivoinnit on esitetty liitteessä. Yhtälössä (4.7) δ(x) on Diracin deltafunktio, joka on määritelty 1, kun x = 0, δ(x) = 0, muulloin. (4.10) Yhtälöiden (4.7)-(4.9) numeerinen toteutus on seuraavanlainen: Termi U σ yhtälöissä (4.7)-(4.9) on perinteisen EIT-ongelman Jacobin matriisi (2.34). Yhtälössä (4.7) deltafunktio tarkoittaa, että matriisista U σ valitaan ainoastaan ne sarakkeet, jotka vastaavat määritettyjä nollakäyrän φ(x) = 0 solmupisteitä laskentahilassa. Nollakäyrä ei välttämättä kulje suoraan solmupisteiden kautta, jolloin nollasolmupisteiksi valitaan nollakäyrän lähellä olevat solmupisteet. Yhtälöissä (4.8)-(4.9) integraalilla ja askelfunktiolla tarkoitetaan matriisin U σ niiden sarakkeiden summausta, jotka vastaavat johtavuusalueiden Ω 1 ja Ω 2 solmupisteitä. Numeerisessa laskennassa deltafunktio ja askelfunktio on järkevää korvata sileämmillä approksimaatioilla, mutta tästä aiheesta lisää myöhemmin tässä luvussa Kolme tai neljä johtavuutta Oletetaan, että kohde Ω voi sisältää enimmillään neljää eri materiaalia, joilla on eri johtavuus σ 1, σ 2, σ 3 ja σ 4. Nyt alueiden Ω 1, Ω 2, Ω 3 ja Ω 4 esittämiseen tarvitaan kaksi level set -funktiota φ 1 ja φ 2. Kirjoitetaan kohteen johtavuus σ(x) neljän johtavuuden tilanteessa nyt paloittain vakiona funktiona level set -formuloinnin avulla σ(x) = σ 1, kun φ 1 0, φ 2 0 σ 2, kun φ 1 < 0, φ 2 0 σ 3 kun φ 1 0, φ 2 < 0 σ 4 kun φ 1 < 0, φ 2 < 0 = σ 1 H(φ 1 )H(φ 2 ) + σ 2 (1 H(φ 1 ))H(φ 2 ) +... σ 3 H(φ 1 )(1 H(φ 2 )) + σ 4 (1 H(φ 1 ))(1 H(φ 2 )). (4.11) Nyt kohteen Ω johtavuus on level set -funktioiden φ 1 ja φ 2 sekä eri alueiden johtavuuksien σ i, i = 1, 2, 3, 4, funktio eli σ = σ(φ 1, φ 2, σ 1, σ 2, σ 3, σ 4 ). Tällöin kuvauksen U(σ) Jacobin matriisi estimoitavien parametrien suhteen edellisen kappaleen esityksen nojalla on nyt muotoa
29 J tot (σ) = (J φ1, J φ2, J σ1, J σ2, J σ3, J σ4 ), (4.12) missä matriisit J φ1, J φ2, J σ1, J σ2, J σ3 ja J σ4 voidaan laskea seuraavasti J φ1 = U(σ) φ 1 J φ2 = U(σ) φ 2 J σ1 = U(σ) σ 1 = J σ2 = U(σ) σ 2 = J σ3 = U(σ) σ 3 = J σ4 = U(σ) σ 4 = = U ( ) (σ 1 σ 2 )H(φ 2 ) + (σ 3 σ 4 )(1 H(φ 2 )) δ(φ 1 ), (4.13) σ = U ( ) (σ 1 σ 3 )H(φ 1 ) + (σ 2 σ 4 )(1 H(φ 1 )) δ(φ 2 ), (4.14) σ Ω Ω Ω Ω U σ H(φ 1)H(φ 2 ) dx, (4.15) U σ (1 H(φ 1))H(φ 2 ) dx, (4.16) U σ H(φ 1)(1 H(φ 2 )) dx, (4.17) U σ (1 H(φ 1))(1 H(φ 2 )) dx. (4.18) Yksityiskohtaisemmat derivoinnit on esitetty liitteessä Askelfunktion ja deltafunktion approksimaatiot Numeerisessa laskennassa johtavuuden σ(x) esityksessä ja Jacobin matriisien yhtälöissä esiintyvät askelfunktio H ja deltafunktio δ on suotavaa korvata sileämmillä funktioilla. Tässä tutkielmassa käytetään seuraavia funktioita approksimoimaan askel -ja deltafunktiota [8, 16, 53] H ɛ1 (φ) = 1 π tan 1 φ + 1 ɛ 1 2, (4.19) δ ɛ2 (φ) = ɛ 2 π(φ 2 + ɛ 2 2), (4.20) missä parametrit ɛ 1 ja ɛ 2 määrittävät approksimaation sileyden. Parametrien ɛ i valinta vaikuttaa approksimaatioiden tarkkuuteen, mitä pienempi ɛ i niin sitä terävämpi ja tarkempi approksimaatio on. Kuitenkin numeerisen laskennan kannalta liian pienten parametrien ɛ i käyttö ei ole kannattavaa. Etenkin deltafunktion tapauksessa hyvin pienillä parametrin ɛ 2 arvoilla approksimaatiosta tulee erittäin terävä ja se voi aiheuttaa epästabiilisuutta numeerisessa laskennassa. Askelfunktion approksimaatiolle
30 voidaan ja on suositeltavaakin käyttää kohtuullisen pientä parametrin ɛ 2 arvoa. Parametrien ɛ i valintaan vaikuttaa myös numeerisessa laskennassa käytettävän hilan elementtien keskimääräinen koko. Tämän tutkielman rekonstruktioissa sileysparametrit valittiin pääsääntöisesti seuraavasti hieman riippuen käytetystä hilasta: ɛ 1 [ ] ja ɛ 2 [1 5] Gauss-Newton algoritmi ja Matlab implementointi Seuraavaksi esitetään Gauss-Newton algoritmi EIT:n käänteisongelman ratkaisemiseksi level set -menetelmällä sekä kuinka tutkielman numeeriset testit on toteutettu Matlabilla. Tämä on näytetty vain yhden level set -funktion ja kahden johtavuuden tapaukselle, mutta siirtyminen kahteen level set -funktioon ja useampaan johtavuuteen on hyvin suoraviivaista. Minimoitava funktionaali (4.5) on johtavuuden σ funktio, mutta level set - lähestymistavassa johtavuus riippuu vielä level set -funktiosta φ sekä yksittäisistä johtavuuden arvoista σ 1 ja σ 2. φ, σ 1 ja σ 2 ovat tuntemattomat parametrit ja ne voidaan estimoida käyttäen iteratiivistä Gauss-Newton algoritmia. Nyt luvussa 2 esitetty Gauss-Newton algoritmi (2.33) saa muodon ˆx k+1 = ˆx k + h k ( J T k W 1 J k + αw 2 ) 1 ( J T k W 1 (V U(ˆx k )) αw 2 (ˆx k x ) ), (4.21) missä ˆx k = (φ k, σ (k) 1, σ (k) 2 ) ja Jacobin matriisi J on yhtälön (4.6) muotoa. Tässä tutkielmassa painotusmatriisi L 1 ja regularisointimatriisi L 2 valitaan yksikkömatriiseiksi, jolloin myös matriisit W 1 ja W 2 ovat yksikkömatriiseja. Prioriestimaattina käytetään nollavektoria x = 0 sekä askelpituus h k pidetään vakiona koko iteraation ajan ja se valitaan väliltä [ ] tilanteesta riippuen. Regularisointiparametrin α valinta riippuu useasti eri tekijästä, esimerkiksi mittauksissa olevasta häiriön suuruudesta, oikean johtavuusjakauman mahdollisesta monimutkaisesta muodosta ja johtavuusinkluusioiden sijainnista toisiinsa nähden. Regularisointiparametri valittiin tapauskohtaisesti ja parhaan regularisointiparametrin arvon valinta tehtiin tulosten visuaalisen tarkastelun perusteella. Mittausten simulointi ja johtavuuden rekonstruointi Matlabin avulla on esitetty liitteessä pseudokoodi-muodossa kommentein varustettuna.



 ja (4.")
 (b) (c) Kuva 4.")
 käänteisongelman hila, jossa on 918")
31 4.1.5 Hilat Tässä tutkielmassa level set -menetelmää testataan EIT:n käänteisongelman ratkaisuun niin 2D- kuin 3D-geometriassa. 2D-tilanteessa laskenta-alueena käytetään ympyränmuotoista kohdetta, joka sisältää 16 elektrodia reunalla ja 3D-tapauksessa kohteena on sylinteri, jonka reunalla on yhteensä 64 elektrodia neljässä kerroksessa. Molemmissa tapauksissa numeerinen laskenta toteutetaan käyttäen kolmea eri hilaa. Simuloidut oikeita mittauksia vastaavat jännitteet lasketaan yhdellä hilalla, suora ongelma ja Jacobin matriisi lasketaan toisella hilalla ja kolmas hila on käänteisongelman ratkaisua varten. Kuvissa (4.2) ja (4.3) on esitetty 2D- ja 3D-tilanteissa käytetyt hilat sekä niitä vastaavat elementtien ja solmupisteiden määrät. (a) (b) (c) Kuva 4.2: 2D hilat: (a) mittausten simulointihila, jossa on elementtiä ja solmupistettä, (b) suoran ongelman hila, jossa on elementtiä ja 7986 solmupistettä ja (c) käänteisongelman hila, jossa on 918 elementtiä ja 492 solmupistettä (a) (b) (c) Kuva 4.3: 3D hilat: (a) mittausten simulointihila, jossa on elementtiä ja solmupistettä, (b) suoran ongelman hila, jossa on elementtiä ja solmupistettä ja (c) käänteisongelman hila, jossa on elementtiä ja 5882 solmupistettä
32 Luku 5 Tulokset Tässä luvussa esitetään tuloksia level set -menetelmän toimivuudesta sähkönjohtavuuden rekonstruoimiseksi erilaisissa tilanteissa sekä 2D- että 3D-geometriassa. Tutkittavia tapauksia ovat esimerkiksi erilaisten johtavuusjakaumien (yksinkertaiset vs. monimutkaiset) rekonstruoiminen, rekonstruktion lopputuloksen riippuvuus level set -funktioiden alkuarvauksesta ja jännitemittausten häiriötason vaikutus rekonstruktioon. Luku on jaettu kahteen osaan 2D- ja 3D-tuloksiin ja tarkemmat yksityiskohdat testitapauksista on kerrottu niitä käsittelevissä kappaleissa. Simuloituihin jännitemittauksiin ei ole lisätty satunnaiskohinaa kuin ainoastaan niissä tapauksissa missä kohinatason vaikutusta rekonstruktioon on tarkasteltu. Niin sanotun "inverse crimen" välttämiseksi simuloidut mittausjännitteet laskettiin käyttäen eri hilaa kuin rekonstruktiossa suoran ongelman ratkaisussa D 2D-geometriassa tarkastellaan tilanteita, joissa kohteessa on kahta tai kolmea eri johtavuutta. Kahdelle eri johtavuudelle rekonstruktio voidaan suorittaa yhdellä level set -funktiolla, mutta kolmen johtavuuden tapauksessa tarvitaan kaksi level set - funktiota Yksi level set -funktio Seuraavissa numeerisissa esimerkeissä kuvannettavan kohteen johtavuus σ koostuu kahdesta eri johtavuudesta σ 1 ja σ 2. Taustan johtavuus σ 1 on 0.1 Sm 1 ja epähomogeenisuuskohteen tai -kohteiden johtavuuden arvo σ 2 on 0.5 Sm 1. Taustan johtavuus oletetaan melkein kaikissa rekonstruktioissa tunnetuksi, mutta toista johtavuuden arvoa ei välttämättä tunneta. Yhdessä tapauksessa molemmat johtavuuden arvot 29
33 oletaan tuntemattomiksi. Rekonstruktioissa tarkastellaan kolmenlaisia tapauksia: 1. molemmat johtavuuden arvot tiedetään ja estimoidaan pelkkää johtavuusjakauman muotoa 2. taustan johtavuus tiedetään ja estimoidaan samanaikaisesti epähomogeenisuuden johtavuuden arvoa ja muotoa 3. molempia johtavuuksia estimoidaan level set -funktion rinnalla. Alkuarvauksena mahdollisille tuntemattomille johtavuuden σ 1 ja σ 2 arvoille käytettiin 0.2 Sm 1 ja 0.25 Sm 1. Ensimmäisessä esimerkissä todellinen johtavuusjakauma σ sisälsi kaksi epähomogeenisuuskohdetta. Rekonstruktiossa epähomogeenisuuksien paikat ja muodot saatiin määritettyä täsmällisesti sekä myös johtavuuden σ 2 arvo pystyttiin estimoimaan tarkasti. Tulokset pelkän level set -funktion päivitykselle on nähtävissä kuvassa (5.1) ja kuvassa (5.2) on esitetty rekonstruktio kun on estimoitu myös johtavuutta σ 2 level set -funktion lisäksi. (a) Todellinen johtavuus (b) Alkuarvaus (c) 10. iteraatio (d) 30. iteraatio Kuva 5.1: (a) Todellinen johtavuus. (b) Alkuarvaus. (c)-(d) Rekonstruktiot iteraation eri vaiheissa kun on estimoitu pelkkää level set -funktiota. Seuraavassa numeerisessa esimerkissä on tutkittu tilannetta, jossa kaksi ympyrän muotoista kohdetta ovat hyvin lähellä toisiaan. Tälläisten kohteiden erottaminen toisistaan perinteisillä pikseli-rekonstruktiomenetelmillä on erittäin hankalaa, mutta
34 (a) Todellinen johtavuus (b) Alkuarvaus (c) 10. iteraatio (d) 20. iteraatio Kuva 5.2: (a) Todellinen johtavuus. (b) Alkuarvaus. (c)-(d) Rekonstruktiot iteraation eri vaiheissa kun on estimoitu level set -funktiota ja johtavuutta σ 2. Lopullinen johtavuuden σ 2 arvo on Sm 1. level set -lähestymistavalla kappaleet saadaan selvästi erotettua toisistaan. Nyt kohteiden välisenä etäisyytenä on käytetty 2 cm, 1 cm ja 0.5 cm sekä johtavuuksien σ 1 ja σ 2 arvot tunnettu. Level set -rekonstruktiot on nähtävissä kuvassa (5.3). Kolmannessa esimerkissä todellinen johtavuusjakauma (kuva 5.4 (a)) voisi olla yksinkertaistettu tapaus tilanteesta, jossa raudoitus pitäisi paikantaa betonin sisältä. Raudan ja betonin johtavuuden arvossa tapahtuva hyppäys on suuri, joten level set- lähestymistavan soveltaminen olisi järkevää. Kuvissa (5.4) ja (5.5) olevista rekonstruktioista nähdään, että palkkien muodot ja paikat saadaan estimoitua kohtuullisen tarkasti sekä myös johtavuuden σ 2 arvo saadaan estimoitua täsmällisesti.
35 (a) Alkuarvaus (b) 2.0 cm (c) (d) 1.0 cm (e) (f) 0.5 cm (g) Kuva 5.3: (a) Kaikille kolmelle tilanteelle käytetty alkuarvaus. (b),(d) ja (f) Todelliset johtavuusjakaumat ja niiden kuvatekstissä on mainittu kohteiden välinen etäisyys. (c),(e) ja (g) Vastaavat rekonstruktiot.
36 (a) Todellinen johtavuus (b) Alkuarvaus (c) 5. iteraatio (d) 15. iteraatio Kuva 5.4: (a) Todellinen johtavuus. (b) Alkuarvaus (c)-(d) Rekonstruktiot iteraation eri vaiheissa kun on estimoitu pelkkää level set -funktiota.
37 (a) Todellinen johtavuus (b) Alkuarvaus (c) 10. iteraatio (d) 20. iteraatio Kuva 5.5: (a) Todellinen johtavuus (b) Alkuarvaus (c)-(d) Rekonstruktiot iteraation eri vaiheissa kun on estimoitu level set -funktiota ja johtavuutta σ 2. Lopullinen johtavuuden σ 2 arvo on Sm 1. Seuraavassa esimerkissä testattiin mittausten kohinatason suuruuden vaikutusta lopulliseen rekonstruktioon. Simuloituihin mittauksiin lisättiin nollakeskiarvoista gaussista häiriötä, jonka keskihajonta oli p-prosenttia kunkin mittauksen itseisarvosta. Todellinen johtavuusjakauma oli yksinkertainen, jossa oli vain yksi epähomogeenisuus. Rekonstruktiot tehtiin kolmelle eri kohinatasolle: 0 %, 0.5 % ja 1 %. Tulokset on esitetty kuvassa (5.6) ja niistä on selvästi nähtävillä, että kohinan lisääntyessä kohteen tarkan muodon, paikan ja johtavuuden estimoiminen vaikeutuu eikä niitä saada enää rekonstruoitua täydellisesti. Kuitenkin tulosten perusteella voidaan sanoa level set -menetelmän kestävän häiriötä kohtuullisen hyvin.
38 (a) Todellinen johtavuus (b) 0 % (c) σ 2 = (d) 0.5 % (e) σ 2 = (f) 1 % (g) σ 2 = Kuva 5.6: (a) Todellinen johtavuus. (b),(d) ja (f) Rekonstruktiot pelkän level set -funktion estimoinnille. (c),(e) ja (g) Rekonstruktiot level set -funktion ja johtavuuden σ 2 yhtäaikaiselle estimoinnille. Kohinataso ja lopulliset johtavuuden σ 2 arvot on esitetty kuvateksteissä.
39 Viidennessä esimerkissä johtavuusjakauma on sama kuin ensimmäisessä esimerkissä (kuva (5.1) (a)), mutta nyt molemmat johtavuudet rekonstruktiossa oletetaan tuntemattomiksi. Rekonstruktio on esitetty kuvassa (5.7) ja siitä nähdään, että myös taustan johtavuus σ 1 voidaan estimoida johtavuuden σ 2 ja level set -funktion kanssa samanaikaisesti hyvällä tarkkuudella. Kuvassa (5.8) on esitetty funktionaalin (4.5) pieneneminen iteraation edetessä sekä näytetty johtavuuksien σ 1 ja σ 2 suppeneminen niiden todellisiin arvoihin. (a) Todellinen johtavuus (b) Alkuarvaus (c) 10. iteraatio (d) 20. iteraatio Kuva 5.7: (a) Todellinen johtavuus (b) Alkuarvaus (c)-(d) Rekonstruktiot iteraation eri vaiheissa kun on estimoitu level set -funktiota ja johtavuuksia σ 1 ja σ 2. Lopulliset johtavuuksien arvot ovat σ 1 = Sm 1 ja σ 1 = Sm 1.
40 F(σ) Johtavuuden arvo Iteraation numero (a) Iteraation numero (b) Kuva 5.8: (a) Funktionaalin (4.5) F (σ) pieneneminen iteraation edetessä. (b) Johtavuuksien σ 1 ja σ 2 suppeneminen (kiinteä viiva) kohti niiden todellisia johtavuusarvoja. Sininen väri viittaa johtavuuteen σ 1 ja punainen väri johtavuuteen σ Kaksi level set -funktiota Seuraavissa numeerisissa esimerkeissä kohde voi sisältää kolmea eri johtavuutta σ 1, σ 2 ja σ 3. Taustan johtavuus σ 1 on taas 0.1 Sm 1 ja mahdollisten epähomogeenisuuksien johtavuuksien σ 2 ja σ 3 arvot ovat 0.4 Sm 1 ja 0.6 Sm 1. Taustan johtavuus oletetaan rekonstruktioissa tunnetuksi, mutta johtavuuksia σ 2 ja σ 3 ei välttämättä tiedetä. Rekonstruktioita tehdään kahdenlaisia: 1. kaikki johtavuusarvot tunnetaan ja estimoidaan ainoastaan level set -funktioita 2. johtavuuksia σ 2 ja σ 3 estimoidaan samanaikaisesti level set -funktioiden kanssa. Alkuarvauksena tuntemattomille johtavuuksille käytetään arvoa 0.25 Sm 1. Ensimmäisessä esimerkissä todellinen johtavuusjakauma sisältää kaksi eri johtavuuden omaava kohdetta. Level set -rekonstruktiot on esitetty kuvissa (5.9) ja (5.10) tapaukselle, jossa on päivitetty pelkkiä level set -funktioita tunnetuilla johtavuuksilla sekä tapaukselle jossa johtavuuksia σ 2 ja σ 3 on estimoitu samanaikaisesti level set -funktioiden kanssa. Tuloksista nähdään, että menetelmä toimii myös useamman johtavuuden tapauksessa. Epähomogeenisuuksien oikeat muodot ja paikat sekä niiden johtavuudet saadaan estimoitua tarkasti.
41 (a) Todellinen johtavuus (b) Alkuarvaus (c) 10. iteraatio (d) 30. iteraatio Kuva 5.9: (a) Todellinen johtavuus. (b) Alkuarvaus. (c)-(d) Rekonstruktiot iteraation eri vaiheissa kun on estimoitu pelkkiä level set -funktioita. Seuraavassa esimerkissä tilanne on hyvin samanlainen kuin edellä, mutta nyt johtavuuskohteiden määrä ja muoto ovat erilaiset. Tässäkin tapauksessa eri johtavuusalueet ja niiden johtavuudet saadaan rekonstruoitua hyvällä tarkkuudella. Rekonstruktiot on esitetty kuvissa (5.11) ja (5.12)
42 (a) Todellinen johtavuus (b) Alkuarvaus (c) 10. iteraatio (d) 35. iteraatio Kuva 5.10: (a) Todellinen johtavuus. (b) Alkuarvaus (c)-(d) Rekonstruktiot iteraation eri vaiheissa kun on estimoitu level set -funktioita ja johtavuuksia σ 2 ja σ 3. Lopullisiksi johtavuuden arvoiksi saadaan σ 2 = Sm 1 ja σ 3 = Sm 1. (a) Todellinen johtavuus (b) Alkuarvaus (c) 5. iteraatio (d) 25. iteraatio Kuva 5.11: (a) Todellinen johtavuus. (b) Alkuarvaus. (c)-(d) Rekonstruktiot iteraation eri vaiheissa kun on estimoitu pelkkiä level set -funktioita.
43 (a) Todellinen johtavuus (b) Alkuarvaus (c) 10. iteraatio (d) 25. iteraatio Kuva 5.12: (a) Todellinen johtavuus. (b) Alkuarvaus. (c)-(d) Rekonstruktiot iteraation eri vaiheissa kun on estimoitu level set -funktioita ja johtavuuksia σ 2 ja σ 3. Lopullisiksi johtavuuden arvoiksi saadaan σ 2 = Sm 1 ja σ 3 = Sm 1. Viimeisessä 2D-esimerkissä on havainnollistettu yhtä level set -menetelmän etua, joka on ettei tarkkaa eri johtavuusalueiden määrää tarvitse tietää. Riittää, että tiedetään eri johtavuuksien mahdollinen enimmäismäärä. Esimerkin tapauksessa on oletettu, että kohteessa olisi kolmea eri johtavuutta vaikka nyt todellinen johtavuus koostuu vain kahdesta eri johtavuudesta. Rekonstruktion tulokset on esitetty kuvassa (5.13). Tuloksista nähdään, että kun kohteessa onkin vain yksi epähomogeenisuus, mutta käytetään kahta level set -funktio niin toinen alue löytää todellisen epähomogeenisuuden ja kolmas alue sulautuu taustan johtavuuteen.
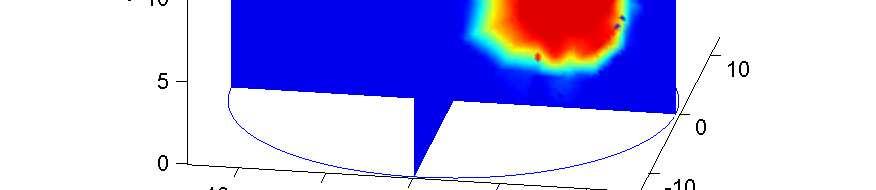
44 (a) Todellinen johtavuus (b) Alkuarvaus (c) 5. iteraatio (d) 25. iteraatio Kuva 5.13: (a) Todellinen johtavuus. (b) Alkuarvaus. (c)-(d) Rekonstruktiot iteraation eri vaiheissa kun on estimoitu level set -funktioita ja johtavuuksia σ 2 ja σ 3. Lopullisiksi johtavuuden arvoiksi saadaan σ 2 = Sm 1 ja σ 3 = Sm D 3D-geometriassa tarkastellaan tilannetta kun kuvattava kohde sisältää vain kahta eri johtavuutta σ 1 ja σ 2 eli tarvitaan ainoastaan yksi level set -funktio johtavuuden rekonstruktioon. Taustan johtavuuden σ 1 arvo on sama kuin aikaisemmissa esimerkeissä eli 0.1 Sm 1 ja mahdollisen epähomogeenisuuden johtavuuden σ 2 arvo on 0.5 Sm 1. 3D- esimerkeissä molemmat johtavuuden arvot tunnetaan ja estimoidaan ainoastaan todellisen johtavuusjakauman muotoa. Alkuarvauksena 3D- rekonstruktioissa on käytetty kuvan (5.14) mukaista tilannetta. Ensimmäisessä esimerkissä todellinen johtavuusjakauma sisälsi yhden pallonmuotoisen kohteen. Todellinen johtavuus ja rekonstruoitu johtavuus on esitetty kuvassa (5.15). Rekonstruktiossa epähomogeenisuuden paikka löytyy kohtuullisesti, mutta sen koko on jää hieman todellista kokoa pienemmäksi.
-(b) Alkuarvaus 3D-")
 (b) (c) (d) Kuva 5.")





.")
45 (a) (b) Kuva 5.14: (a)-(b) Alkuarvaus 3D- rekonstruktioissa. (a) (b) (c) (d) Kuva 5.15: (a)-(b) Todellinen johtavuus. (c)-(d) Rekonstruktio kun on estimoitu level set -funktiota. Toisessa esimerkissä todellinen johtavuusjakauma koostui kahdesta pallomaisesta kohteesta. Todellinen johtavuus sekä rekonstruoitu johtavuus on esitetty kuvassa (5.16). Tälläkin kertaa epähomogeenisuuksen paikat saadaan estimoitua hyvin, mutta niiden koko jää hieman todellista pienemmäksi.
 (d)")






46 (a) (b) (c) (d) Kuva 5.16: (a)-(b) Todellinen johtavuus. (c)-(d) Rekonstruktio kun on estimoitu level set -funktiota.
47 Luku 6 Yhteenveto & Pohdinta Tässä tutkielmassa impedanssitomografian sähkönjohtavuuden rekonstruktioongelma ratkaistiin soveltamalla level set -menetelmää sekä 2D- että 3D-tapauksessa. Numeeristen tulosten perusteella voidaan sanoa, että level set -menetelmä on tehokas työkalu löytämään kohteessa olevien epähomogeenisuuksien rajapinnat sekä paikat ja jakamaan näin kohde omiin alueisiin, joilla on eri johtavuus. Level set -menetelmällä on mahdollista myös estimoida epähomogeenisuusalueiden johtavuuden arvoja mikäli niitä ei entuudestaan tiedetä. Tämän tutkielman lähestymistavassa kohteen johtavuus oletetaan paloittain vakioksi eri johtavuusalueissa, mutta level set -lähestymistapa on mahdollista muokata muotoon, missä eri alueiden johtavuudet ovat paikan funktioita eivätkä vakioita. Rekonstruktioita tehtiin useille erilaisille johtavuusjakaumilla, muuttamalla johtavuuskohteiden määrää, paikkaa ja muotoja. Myös kohteessa olevien mahdollisten eri johtavuusarvojen σ i lukumäärää vaihdettiin kahden ja kolmen johtavuuden välillä. Tulokset-kappaleesta nähdään, että jokaisessa esimerkkitapauksessa johtavuuskohteiden rajapinnat ja sijainnit sekä tarvittaessa myös niiden johtavuudet pystyttiin rekonstruoimaan tarkasti. Level set -menetelmän hyvä puoli on, että se ei ole hirveän riippuvainen alkuarvauksesta. Esimerkiksi jos kohde sisältää kolme erillistä johtavuusaluetta ja alkuarvaus on vain yksittäinen alue niin iteraation edetessä alkuarvauksen määrittelemä alue hajoaa lopulta kolmeen osaan. Ja päinvastoin, jos alkuarvauksessa on enemmän alueita kuin todellisessa johtavuusjakaumassa, niin alkuarvauksen alueet yhdistyvät lopulta toisiinsa. Toinen level set -menetelmän etu on ettei kohteessa olevien eri johtavuusarvojen tarkkaa lukumäärä tarvitse tietää vain ainoastaan niiden mahdollinen 44
Sovelletun fysiikan laitos E-mail: Marko.Vauhkonen@uku.fi. Marko Vauhkonen, Kuopion yliopisto, Sovelletun fysiikan laitos Slide 1
 Marko Vauhkonen Kuopion yliopisto Sovelletun fysiikan laitos E-mail: Marko.Vauhkonen@uku.fi Marko Vauhkonen, Kuopion yliopisto, Sovelletun fysiikan laitos Slide 1 Sisältö Mallintamisesta mallien käyttötarkoituksia
Marko Vauhkonen Kuopion yliopisto Sovelletun fysiikan laitos E-mail: Marko.Vauhkonen@uku.fi Marko Vauhkonen, Kuopion yliopisto, Sovelletun fysiikan laitos Slide 1 Sisältö Mallintamisesta mallien käyttötarkoituksia
Numeeriset menetelmät TIEA381. Luento 8. Kirsi Valjus. Jyväskylän yliopisto. Luento 8 () Numeeriset menetelmät / 35
 Numeeriset menetelmät / 35") Numeeriset menetelmät TIEA381 Luento 8 Kirsi Valjus Jyväskylän yliopisto Luento 8 () Numeeriset menetelmät 11.4.2013 1 / 35 Luennon 8 sisältö Interpolointi ja approksimointi Funktion approksimointi Tasainen
Numeeriset menetelmät TIEA381 Luento 8 Kirsi Valjus Jyväskylän yliopisto Luento 8 () Numeeriset menetelmät 11.4.2013 1 / 35 Luennon 8 sisältö Interpolointi ja approksimointi Funktion approksimointi Tasainen
Numeeriset menetelmät
 Numeeriset menetelmät Luento 5 Ti 20.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 5 Ti 20.9.2011 p. 1/40 p. 1/40 Choleskyn menetelmä Positiivisesti definiiteillä matriiseilla kolmiohajotelma
Numeeriset menetelmät Luento 5 Ti 20.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 5 Ti 20.9.2011 p. 1/40 p. 1/40 Choleskyn menetelmä Positiivisesti definiiteillä matriiseilla kolmiohajotelma
Yhtälöryhmä matriisimuodossa. MS-A0004/A0006 Matriisilaskenta. Tarkastellaan esimerkkinä lineaarista yhtälöparia. 2x1 x 2 = 1 x 1 + x 2 = 5.
 2. MS-A4/A6 Matriisilaskenta 2. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 5.9.25 Tarkastellaan esimerkkinä lineaarista yhtälöparia { 2x x 2 = x + x 2
2. MS-A4/A6 Matriisilaskenta 2. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 5.9.25 Tarkastellaan esimerkkinä lineaarista yhtälöparia { 2x x 2 = x + x 2
3.2.2 Tikhonovin regularisaatio
 3 Tikhonovin regularisaatio Olkoon x 0 R n tuntematon, M R m n teoriamatriisi ja y Mx + ε R m (316 annettu data Häiriöherkässä ongelmassa pienimmän neliösumman miniminormiratkaisu x M + y Q N (M x + M
3 Tikhonovin regularisaatio Olkoon x 0 R n tuntematon, M R m n teoriamatriisi ja y Mx + ε R m (316 annettu data Häiriöherkässä ongelmassa pienimmän neliösumman miniminormiratkaisu x M + y Q N (M x + M
Monitaajuusimpedanssitomografia raudoitteita sisältävän rakenteen kuvantamisessa. Niko Hänninen
 Monitaajuusimpedanssitomografia raudoitteita sisältävän rakenteen kuvantamisessa Niko Hänninen Z 3 2 1 0 6 4 2 0 2 4 6-2 Y -4-6 -6-4 -2 X 0 Pro gradu -tutkielma 18. toukokuuta 2017 Itä-Suomen yliopisto
Monitaajuusimpedanssitomografia raudoitteita sisältävän rakenteen kuvantamisessa Niko Hänninen Z 3 2 1 0 6 4 2 0 2 4 6-2 Y -4-6 -6-4 -2 X 0 Pro gradu -tutkielma 18. toukokuuta 2017 Itä-Suomen yliopisto
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä.
 Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä.") MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016
Approksimaatiovirheiden mallintaminen raudoitteita sisältävän kohteen resistanssitomograassa
 Approksimaatiovirheiden mallintaminen raudoitteita sisältävän kohteen resistanssitomograassa Mikko Räsänen Pro gradu -tutkielma Sovelletun fysiikan koulutusohjelma Itä-Suomen yliopisto, Sovelletun fysiikan
Approksimaatiovirheiden mallintaminen raudoitteita sisältävän kohteen resistanssitomograassa Mikko Räsänen Pro gradu -tutkielma Sovelletun fysiikan koulutusohjelma Itä-Suomen yliopisto, Sovelletun fysiikan
Inversio-ongelmien laskennallinen peruskurssi Luento 4
 Inversio-ongelmien laskennallinen peruskurssi Luento 4 Kevät 20 Regularisointi Eräs keino yrittää ratkaista (likimääräisesti) huonosti asetettuja ongelmia on regularisaatio. Regularisoinnissa ongelmaa
Inversio-ongelmien laskennallinen peruskurssi Luento 4 Kevät 20 Regularisointi Eräs keino yrittää ratkaista (likimääräisesti) huonosti asetettuja ongelmia on regularisaatio. Regularisoinnissa ongelmaa
MS-C1340 Lineaarialgebra ja
 MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Matriisinormi, häiriöalttius Riikka Kangaslampi Kevät 2017 Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Matriisinormi Matriisinormi Matriiseille
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Matriisinormi, häiriöalttius Riikka Kangaslampi Kevät 2017 Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Matriisinormi Matriisinormi Matriiseille
P (X B) = f X (x)dx. xf X (x)dx. g(x)f X (x)dx.
 = f X (x)dx. xf X (x)dx. g(x)f X (x)dx.") Yhteenveto: Satunnaisvektorit ovat kuvauksia tn-avaruudelta seillaiselle avaruudelle, johon sisältyy satunnaisvektorin kaikki mahdolliset reaalisaatiot. Satunnaisvektorin realisaatio eli otos on jokin
Yhteenveto: Satunnaisvektorit ovat kuvauksia tn-avaruudelta seillaiselle avaruudelle, johon sisältyy satunnaisvektorin kaikki mahdolliset reaalisaatiot. Satunnaisvektorin realisaatio eli otos on jokin
Yhtälöryhmä matriisimuodossa. MS-A0007 Matriisilaskenta. Tarkastellaan esimerkkinä lineaarista yhtälöparia. 2x1 x 2 = 1 x 1 + x 2 = 5.
 2. MS-A000 Matriisilaskenta 2. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2..205 Tarkastellaan esimerkkinä lineaarista yhtälöparia { 2x x 2 = x x 2 =
2. MS-A000 Matriisilaskenta 2. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2..205 Tarkastellaan esimerkkinä lineaarista yhtälöparia { 2x x 2 = x x 2 =
Ei välttämättä, se voi olla esimerkiksi Reuleaux n kolmio:
 Inversio-ongelmista Craig, Brown: Inverse problems in astronomy, Adam Hilger 1986. Havaitaan oppositiossa olevaa asteroidia. Pyörimisestä huolimatta sen kirkkaus ei muutu. Projisoitu pinta-ala pysyy ilmeisesti
Inversio-ongelmista Craig, Brown: Inverse problems in astronomy, Adam Hilger 1986. Havaitaan oppositiossa olevaa asteroidia. Pyörimisestä huolimatta sen kirkkaus ei muutu. Projisoitu pinta-ala pysyy ilmeisesti
Vektoreiden virittämä aliavaruus
 Vektoreiden virittämä aliavaruus Määritelmä Oletetaan, että v 1, v 2,... v k R n. Näiden vektoreiden virittämä aliavaruus span( v 1, v 2,... v k ) tarkoittaa kyseisten vektoreiden kaikkien lineaarikombinaatioiden
Vektoreiden virittämä aliavaruus Määritelmä Oletetaan, että v 1, v 2,... v k R n. Näiden vektoreiden virittämä aliavaruus span( v 1, v 2,... v k ) tarkoittaa kyseisten vektoreiden kaikkien lineaarikombinaatioiden
Likimääräisratkaisut ja regularisaatio
 Luku 3 Likimääräisratkaisut ja regularisaatio Käytännön inversio-ongelmissa annettu data y ei aina ole tarkkaa, vaan sisältää häiriöitä. Tuntemattomasta x on annettu häiriöinen data y F (x + }{{}}{{} ε.
Luku 3 Likimääräisratkaisut ja regularisaatio Käytännön inversio-ongelmissa annettu data y ei aina ole tarkkaa, vaan sisältää häiriöitä. Tuntemattomasta x on annettu häiriöinen data y F (x + }{{}}{{} ε.
4.0.2 Kuinka hyvä ennuste on?
 Luonteva ennuste on käyttää yhtälöä (4.0.1), jolloin estimaattori on muotoa X t = c + φ 1 X t 1 + + φ p X t p ja estimointivirheen varianssi on σ 2. X t }{{} todellinen arvo Xt }{{} esimaattori = ε t Esimerkki
Luonteva ennuste on käyttää yhtälöä (4.0.1), jolloin estimaattori on muotoa X t = c + φ 1 X t 1 + + φ p X t p ja estimointivirheen varianssi on σ 2. X t }{{} todellinen arvo Xt }{{} esimaattori = ε t Esimerkki
Inversio-ongelmien laskennallinen peruskurssi Luento 7 8
 Inversio-ongelmien laskennallinen peruskurssi Luento 7 8 Kevät 2011 1 Iteratiivisista menetelmistä Tähän mennessä on tarkasteltu niin sanottuja suoria menetelmiä, joissa (likimääräinen) ratkaisu saadaan
Inversio-ongelmien laskennallinen peruskurssi Luento 7 8 Kevät 2011 1 Iteratiivisista menetelmistä Tähän mennessä on tarkasteltu niin sanottuja suoria menetelmiä, joissa (likimääräinen) ratkaisu saadaan
Numeeriset menetelmät TIEA381. Luento 12. Kirsi Valjus. Jyväskylän yliopisto. Luento 12 () Numeeriset menetelmät / 33
 Numeeriset menetelmät / 33") Numeeriset menetelmät TIEA381 Luento 12 Kirsi Valjus Jyväskylän yliopisto Luento 12 () Numeeriset menetelmät 25.4.2013 1 / 33 Luennon 2 sisältö Tavallisten differentiaaliyhtälöiden numeriikasta Rungen
Numeeriset menetelmät TIEA381 Luento 12 Kirsi Valjus Jyväskylän yliopisto Luento 12 () Numeeriset menetelmät 25.4.2013 1 / 33 Luennon 2 sisältö Tavallisten differentiaaliyhtälöiden numeriikasta Rungen
Vapaus. Määritelmä. jos c 1 v 1 + c 2 v c k v k = 0 joillakin c 1,..., c k R, niin c 1 = 0, c 2 = 0,..., c k = 0.
 Vapaus Määritelmä Oletetaan, että v 1, v 2,..., v k R n, missä n {1, 2,... }. Vektorijono ( v 1, v 2,..., v k ) on vapaa eli lineaarisesti riippumaton, jos seuraava ehto pätee: jos c 1 v 1 + c 2 v 2 +
Vapaus Määritelmä Oletetaan, että v 1, v 2,..., v k R n, missä n {1, 2,... }. Vektorijono ( v 1, v 2,..., v k ) on vapaa eli lineaarisesti riippumaton, jos seuraava ehto pätee: jos c 1 v 1 + c 2 v 2 +
MS-A0207 Differentiaali- ja integraalilaskenta 2 (Chem) Yhteenveto, osa I
 Yhteenveto, osa I") MS-A0207 Differentiaali- ja integraalilaskenta 2 (Chem) Yhteenveto, osa I G. Gripenberg Aalto-yliopisto 21. tammikuuta 2016 G. Gripenberg (Aalto-yliopisto) MS-A0207 Differentiaali- ja integraalilaskenta
MS-A0207 Differentiaali- ja integraalilaskenta 2 (Chem) Yhteenveto, osa I G. Gripenberg Aalto-yliopisto 21. tammikuuta 2016 G. Gripenberg (Aalto-yliopisto) MS-A0207 Differentiaali- ja integraalilaskenta
Numeeriset menetelmät TIEA381. Luento 6. Kirsi Valjus. Jyväskylän yliopisto. Luento 6 () Numeeriset menetelmät / 33
 Numeeriset menetelmät / 33") Numeeriset menetelmät TIEA381 Luento 6 Kirsi Valjus Jyväskylän yliopisto Luento 6 () Numeeriset menetelmät 4.4.2013 1 / 33 Luennon 6 sisältö Interpolointi ja approksimointi Polynomi-interpolaatio: Vandermonden
Numeeriset menetelmät TIEA381 Luento 6 Kirsi Valjus Jyväskylän yliopisto Luento 6 () Numeeriset menetelmät 4.4.2013 1 / 33 Luennon 6 sisältö Interpolointi ja approksimointi Polynomi-interpolaatio: Vandermonden
Numeeriset menetelmät TIEA381. Luento 5. Kirsi Valjus. Jyväskylän yliopisto. Luento 5 () Numeeriset menetelmät / 28
 Numeeriset menetelmät / 28") Numeeriset menetelmät TIEA381 Luento 5 Kirsi Valjus Jyväskylän yliopisto Luento 5 () Numeeriset menetelmät 3.4.2013 1 / 28 Luennon 5 sisältö Luku 4: Ominaisarvotehtävistä Potenssiinkorotusmenetelmä QR-menetelmä
Numeeriset menetelmät TIEA381 Luento 5 Kirsi Valjus Jyväskylän yliopisto Luento 5 () Numeeriset menetelmät 3.4.2013 1 / 28 Luennon 5 sisältö Luku 4: Ominaisarvotehtävistä Potenssiinkorotusmenetelmä QR-menetelmä
Kannan vektorit siis virittävät aliavaruuden, ja lisäksi kanta on vapaa. Lauseesta 7.6 saadaan seuraava hyvin käyttökelpoinen tulos:
 8 Kanta Tässä luvussa tarkastellaan aliavaruuden virittäjävektoreita, jotka muodostavat lineaarisesti riippumattoman jonon. Merkintöjen helpottamiseksi oletetaan luvussa koko ajan, että W on vektoreiden
8 Kanta Tässä luvussa tarkastellaan aliavaruuden virittäjävektoreita, jotka muodostavat lineaarisesti riippumattoman jonon. Merkintöjen helpottamiseksi oletetaan luvussa koko ajan, että W on vektoreiden
Luento 8: Epälineaarinen optimointi
 Luento 8: Epälineaarinen optimointi Vektoriavaruus R n R n on kaikkien n-jonojen x := (x,..., x n ) joukko. Siis R n := Määritellään nollavektori 0 = (0,..., 0). Reaalisten m n-matriisien joukkoa merkitään
Luento 8: Epälineaarinen optimointi Vektoriavaruus R n R n on kaikkien n-jonojen x := (x,..., x n ) joukko. Siis R n := Määritellään nollavektori 0 = (0,..., 0). Reaalisten m n-matriisien joukkoa merkitään
Epälineaaristen yhtälöiden ratkaisumenetelmät
 Epälineaaristen yhtälöiden ratkaisumenetelmät Keijo Ruotsalainen Division of Mathematics Perusoletus Lause 3.1 Olkoon f : [a, b] R jatkuva funktio siten, että f(a)f(b) < 0. Tällöin funktiolla on ainakin
Epälineaaristen yhtälöiden ratkaisumenetelmät Keijo Ruotsalainen Division of Mathematics Perusoletus Lause 3.1 Olkoon f : [a, b] R jatkuva funktio siten, että f(a)f(b) < 0. Tällöin funktiolla on ainakin
2.2 Gaussin eliminaatio. 2.2 Gaussin eliminaatio. 2.2 Gaussin eliminaatio. 2.2 Gaussin eliminaatio
 x = x 2 = 5/2 x 3 = 2 eli Ratkaisu on siis x = (x x 2 x 3 ) = ( 5/2 2) (Tarkista sijoittamalla!) 5/2 2 Tämä piste on alkuperäisten tasojen ainoa leikkauspiste Se on myös piste/vektori jonka matriisi A
x = x 2 = 5/2 x 3 = 2 eli Ratkaisu on siis x = (x x 2 x 3 ) = ( 5/2 2) (Tarkista sijoittamalla!) 5/2 2 Tämä piste on alkuperäisten tasojen ainoa leikkauspiste Se on myös piste/vektori jonka matriisi A
Luku 6. reunaehtoprobleemat. 6.1 Laplacen ja Poissonin yhtälöt Reunaehdot. Kun sähkökentän lauseke E = φ sijoitetaan Gaussin lakiin, saadaan
 Luku 6 Sähköstatiikan reunaehtoproleemat 6.1 Laplacen ja Poissonin yhtälöt Kun sähkökentän lauseke E = φ sijoitetaan Gaussin lakiin, saadaan ( φ) = ρ ε 0, (6.1) josta 2 φ = ρ ε 0. (6.2) Tämä tulos on nimeltään
Luku 6 Sähköstatiikan reunaehtoproleemat 6.1 Laplacen ja Poissonin yhtälöt Kun sähkökentän lauseke E = φ sijoitetaan Gaussin lakiin, saadaan ( φ) = ρ ε 0, (6.1) josta 2 φ = ρ ε 0. (6.2) Tämä tulos on nimeltään
SMG-5250 Sähkömagneettinen yhteensopivuus (EMC) Jari Kangas Tampereen teknillinen yliopisto Elektroniikan laitos
 Jari Kangas Tampereen teknillinen yliopisto Elektroniikan laitos") SMG-5250 Sähkömagneettinen yhteensopivuus (EMC) Jari Kangas jari.kangas@tut.fi Tampereen teknillinen yliopisto Elektroniikan laitos Sähkömagnetiikka 2009 1 Sähköstatiikka Coulombin laki ja sähkökentän
SMG-5250 Sähkömagneettinen yhteensopivuus (EMC) Jari Kangas jari.kangas@tut.fi Tampereen teknillinen yliopisto Elektroniikan laitos Sähkömagnetiikka 2009 1 Sähköstatiikka Coulombin laki ja sähkökentän
Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos
 Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Malinen/Vesanen MS-A0205/6 Differentiaali- ja integraalilaskenta 2, kevät 2017 Laskuharjoitus 4A (Vastaukset) alkuviikolla
Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Malinen/Vesanen MS-A0205/6 Differentiaali- ja integraalilaskenta 2, kevät 2017 Laskuharjoitus 4A (Vastaukset) alkuviikolla
Inversio-ongelmien laskennallinen peruskurssi Luento 2
 Inversio-ongelmien laskennallinen peruskurssi Luento 2 Kevät 2012 1 Lineaarinen inversio-ongelma Määritelmä 1.1. Yleinen (reaaliarvoinen) lineaarinen inversio-ongelma voidaan esittää muodossa m = Ax +
Inversio-ongelmien laskennallinen peruskurssi Luento 2 Kevät 2012 1 Lineaarinen inversio-ongelma Määritelmä 1.1. Yleinen (reaaliarvoinen) lineaarinen inversio-ongelma voidaan esittää muodossa m = Ax +
Iteratiiviset ratkaisumenetelmät
 Iteratiiviset ratkaisumenetelmät Keijo Ruotsalainen Division of Mathematics Yleinen iteraatio Lineaarisen yhtälöryhmän iteratiivinen ratkaisumenetelmä voidaan esittää muodossa: Anna alkuarvaus: x 0 R n
Iteratiiviset ratkaisumenetelmät Keijo Ruotsalainen Division of Mathematics Yleinen iteraatio Lineaarisen yhtälöryhmän iteratiivinen ratkaisumenetelmä voidaan esittää muodossa: Anna alkuarvaus: x 0 R n
Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos
 Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Malinen/Ojalammi MS-A0203 Differentiaali- ja integraalilaskenta 2, kevät 2016 Laskuharjoitus 4A (Vastaukset) alkuviikolla
Aalto-yliopiston perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Malinen/Ojalammi MS-A0203 Differentiaali- ja integraalilaskenta 2, kevät 2016 Laskuharjoitus 4A (Vastaukset) alkuviikolla
Matriisilaskenta, LH4, 2004, ratkaisut 1. Hae seuraavien R 4 :n aliavaruuksien dimensiot, jotka sisältävät vain
 Matriisilaskenta LH4 24 ratkaisut 1 Hae seuraavien R 4 :n aliavaruuksien dimensiot jotka sisältävät vain a) Kaikki muotoa (a b c d) olevat vektorit joilla d a + b b) Kaikki muotoa (a b c d) olevat vektorit
Matriisilaskenta LH4 24 ratkaisut 1 Hae seuraavien R 4 :n aliavaruuksien dimensiot jotka sisältävät vain a) Kaikki muotoa (a b c d) olevat vektorit joilla d a + b b) Kaikki muotoa (a b c d) olevat vektorit
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 10: Stokesin lause
 MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 10: Stokesin lause Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 2016 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 10: Stokesin lause Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 2016 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy
MS-C1340 Lineaarialgebra ja
 MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt QR-hajotelma ja pienimmän neliösumman menetelmä Riikka Kangaslampi Kevät 2017 Matematiikan ja systeemianalyysin laitos Aalto-yliopisto PNS-ongelma PNS-ongelma
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt QR-hajotelma ja pienimmän neliösumman menetelmä Riikka Kangaslampi Kevät 2017 Matematiikan ja systeemianalyysin laitos Aalto-yliopisto PNS-ongelma PNS-ongelma
MS-A0003/A0005 Matriisilaskenta Laskuharjoitus 2 / vko 45
 MS-A3/A5 Matriisilaskenta Laskuharjoitus 2 / vko 45 Tehtävä (L): Hahmottele kompleksitasoon ne pisteet, jotka toteuttavat a) z 2i = 2, b) z 2i < 2, c) /z
MS-A3/A5 Matriisilaskenta Laskuharjoitus 2 / vko 45 Tehtävä (L): Hahmottele kompleksitasoon ne pisteet, jotka toteuttavat a) z 2i = 2, b) z 2i < 2, c) /z
IMPEDANSSITOMOGRAFIA AIVOVERENVUODON DIAGNOSOINNISSA - TARVE UUDELLE TEKNOLOGIALLE
 IMPEDANSSITOMOGRAFIA AIVOVERENVUODON DIAGNOSOINNISSA - TARVE UUDELLE TEKNOLOGIALLE NINA FORSS YLILÄÄKÄRI, LINJAJOHTAJA HUS NEUROKESKUS AALTO YLIOPISTO (NEUROTIETEEN JA LÄÄKETIETEELLISEN TEKNIIKAN LAITOS)
IMPEDANSSITOMOGRAFIA AIVOVERENVUODON DIAGNOSOINNISSA - TARVE UUDELLE TEKNOLOGIALLE NINA FORSS YLILÄÄKÄRI, LINJAJOHTAJA HUS NEUROKESKUS AALTO YLIOPISTO (NEUROTIETEEN JA LÄÄKETIETEELLISEN TEKNIIKAN LAITOS)
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt
 MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt ja pienimmän neliösumman menetelmä Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 18 R. Kangaslampi QR ja PNS PNS-ongelma
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt ja pienimmän neliösumman menetelmä Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 18 R. Kangaslampi QR ja PNS PNS-ongelma
Numeeriset menetelmät
 Numeeriset menetelmät Luento 6 To 22.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 6 To 22.9.2011 p. 1/38 p. 1/38 Ominaisarvotehtävät Monet sovellukset johtavat ominaisarvotehtäviin Yksi
Numeeriset menetelmät Luento 6 To 22.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 6 To 22.9.2011 p. 1/38 p. 1/38 Ominaisarvotehtävät Monet sovellukset johtavat ominaisarvotehtäviin Yksi
1 Sisätulo- ja normiavaruudet
 1 Sisätulo- ja normiavaruudet 1.1 Sisätuloavaruus Määritelmä 1. Olkoon V reaalinen vektoriavaruus. Kuvaus : V V R on reaalinen sisätulo eli pistetulo, jos (a) v w = w v (symmetrisyys); (b) v + u w = v
1 Sisätulo- ja normiavaruudet 1.1 Sisätuloavaruus Määritelmä 1. Olkoon V reaalinen vektoriavaruus. Kuvaus : V V R on reaalinen sisätulo eli pistetulo, jos (a) v w = w v (symmetrisyys); (b) v + u w = v
802320A LINEAARIALGEBRA OSA II
 802320A LINEAARIALGEBRA OSA II Tapani Matala-aho MATEMATIIKKA/LUTK/OULUN YLIOPISTO SYKSY 2016 LINEAARIALGEBRA 1 / 64 Sisätuloavaruus Määritelmä 1 Olkoon V reaalinen vektoriavaruus. Kuvaus on reaalinen
802320A LINEAARIALGEBRA OSA II Tapani Matala-aho MATEMATIIKKA/LUTK/OULUN YLIOPISTO SYKSY 2016 LINEAARIALGEBRA 1 / 64 Sisätuloavaruus Määritelmä 1 Olkoon V reaalinen vektoriavaruus. Kuvaus on reaalinen
Oletetaan ensin, että tangenttitaso on olemassa. Nyt pinnalla S on koordinaattiesitys ψ, jolle pätee että kaikilla x V U
 HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi II, syksy 018 Harjoitus 4 Ratkaisuehdotukset Tehtävä 1. Olkoon U R avoin joukko ja ϕ = (ϕ 1, ϕ, ϕ 3 ) : U R 3 kaksiulotteisen C 1 -alkeispinnan
HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi II, syksy 018 Harjoitus 4 Ratkaisuehdotukset Tehtävä 1. Olkoon U R avoin joukko ja ϕ = (ϕ 1, ϕ, ϕ 3 ) : U R 3 kaksiulotteisen C 1 -alkeispinnan
Vektorien pistetulo on aina reaaliluku. Esimerkiksi vektorien v = (3, 2, 0) ja w = (1, 2, 3) pistetulo on
 ja w = (1, 2, 3) pistetulo on") 13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
12. Hessen matriisi. Ääriarvoteoriaa
 179 12. Hessen matriisi. Ääriarvoteoriaa Tarkastelemme tässä luvussa useamman muuttujan (eli vektorimuuttujan) n reaaliarvoisia unktioita : R R. Edellisessä luvussa todettiin, että riittävän säännöllisellä
179 12. Hessen matriisi. Ääriarvoteoriaa Tarkastelemme tässä luvussa useamman muuttujan (eli vektorimuuttujan) n reaaliarvoisia unktioita : R R. Edellisessä luvussa todettiin, että riittävän säännöllisellä
MS-C1340 Lineaarialgebra ja
 MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Vektoriavaruudet Riikka Kangaslampi kevät 2017 Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Idea Lineaarisen systeemin ratkaiseminen Olkoon
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Vektoriavaruudet Riikka Kangaslampi kevät 2017 Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Idea Lineaarisen systeemin ratkaiseminen Olkoon
Numeeriset menetelmät TIEA381. Luento 4. Kirsi Valjus. Jyväskylän yliopisto. Luento 4 () Numeeriset menetelmät / 44
 Numeeriset menetelmät / 44") Numeeriset menetelmät TIEA381 Luento 4 Kirsi Valjus Jyväskylän yliopisto Luento 4 () Numeeriset menetelmät 21.3.2013 1 / 44 Luennon 4 sisältö Lineaarisen yhtälöryhmän ratkaisemisesta: Choleskyn menetelmä
Numeeriset menetelmät TIEA381 Luento 4 Kirsi Valjus Jyväskylän yliopisto Luento 4 () Numeeriset menetelmät 21.3.2013 1 / 44 Luennon 4 sisältö Lineaarisen yhtälöryhmän ratkaisemisesta: Choleskyn menetelmä
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt
 MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Vektoriavaruudet Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 17 R. Kangaslampi Vektoriavaruudet Vektoriavaruus
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Vektoriavaruudet Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 17 R. Kangaslampi Vektoriavaruudet Vektoriavaruus
Dierentiaaliyhtälöistä
 Dierentiaaliyhtälöistä Markus Kettunen 4. maaliskuuta 2009 1 SISÄLTÖ 1 Sisältö 1 Dierentiaaliyhtälöistä 2 1.1 Johdanto................................. 2 1.2 Ratkaisun yksikäsitteisyydestä.....................
Dierentiaaliyhtälöistä Markus Kettunen 4. maaliskuuta 2009 1 SISÄLTÖ 1 Sisältö 1 Dierentiaaliyhtälöistä 2 1.1 Johdanto................................. 2 1.2 Ratkaisun yksikäsitteisyydestä.....................
(0 desimaalia, 2 merkitsevää numeroa).
.") NUMEERISET MENETELMÄT DEMOVASTAUKSET SYKSY 20.. (a) Absoluuttinen virhe: ε x x ˆx /7 0.4 /7 4/00 /700 0.004286. Suhteellinen virhe: ρ x x ˆx x /700 /7 /00 0.00 0.%. (b) Kahden desimaalin tarkkuus x ˆx
NUMEERISET MENETELMÄT DEMOVASTAUKSET SYKSY 20.. (a) Absoluuttinen virhe: ε x x ˆx /7 0.4 /7 4/00 /700 0.004286. Suhteellinen virhe: ρ x x ˆx x /700 /7 /00 0.00 0.%. (b) Kahden desimaalin tarkkuus x ˆx
impedanssitomografian mallintaminen sisäisille virtalähteille
 impedanssitomografian mallintaminen sisäisille virtalähteille Mika Tarvainen Pro Gradu -tutkielma Syyskuu 999 Kuopion yliopisto Sovelletun fysiikan laitos KUOPION YLIOPISTO, luonnontieteiden ja ympäristötieteiden
impedanssitomografian mallintaminen sisäisille virtalähteille Mika Tarvainen Pro Gradu -tutkielma Syyskuu 999 Kuopion yliopisto Sovelletun fysiikan laitos KUOPION YLIOPISTO, luonnontieteiden ja ympäristötieteiden
9. Tila-avaruusmallit
 9. Tila-avaruusmallit Aikasarjan stokastinen malli ja aikasarjasta tehdyt havainnot voidaan esittää joustavassa ja monipuolisessa muodossa ns. tila-avaruusmallina. Useat aikasarjat edustavat dynaamisia
9. Tila-avaruusmallit Aikasarjan stokastinen malli ja aikasarjasta tehdyt havainnot voidaan esittää joustavassa ja monipuolisessa muodossa ns. tila-avaruusmallina. Useat aikasarjat edustavat dynaamisia
Luento 8: Epälineaarinen optimointi
 Luento 8: Epälineaarinen optimointi Vektoriavaruus R n R n on kaikkien n-jonojen x := (x,..., x n ) joukko. Siis R n := Määritellään nollavektori = (,..., ). Reaalisten m n-matriisien joukkoa merkitään
Luento 8: Epälineaarinen optimointi Vektoriavaruus R n R n on kaikkien n-jonojen x := (x,..., x n ) joukko. Siis R n := Määritellään nollavektori = (,..., ). Reaalisten m n-matriisien joukkoa merkitään
4. Gaussin laki. (15.4)
") Luku 15 Maxwellin yhtälöt 15.1 iirrosvirta Voidaan osoittaa, että vektorikenttä on yksikäsitteisesti määrätty, jos tunnetaan sen divergenssi, roottori ja reunaehdot. Tämän vuoksi sähkö- ja magneettikenttien
Luku 15 Maxwellin yhtälöt 15.1 iirrosvirta Voidaan osoittaa, että vektorikenttä on yksikäsitteisesti määrätty, jos tunnetaan sen divergenssi, roottori ja reunaehdot. Tämän vuoksi sähkö- ja magneettikenttien
PIENTAAJUISET SÄHKÖ- JA MAGNEETTIKENTÄT HARJOITUSTEHTÄVÄ 1. Pallomaisen solun relaksaatiotaajuus 1 + 1
 Aalto-yliopisto HARJOITUSTEHTÄVIEN Sähkötekniikan korkeakoulu RATKAISUT Sähkömagneettisten kenttien ja optisen säteilyn biologiset 8.1.016 vaikutukset ja mittaukset ELEC-E770 Lauri Puranen Säteilyturvakeskus
Aalto-yliopisto HARJOITUSTEHTÄVIEN Sähkötekniikan korkeakoulu RATKAISUT Sähkömagneettisten kenttien ja optisen säteilyn biologiset 8.1.016 vaikutukset ja mittaukset ELEC-E770 Lauri Puranen Säteilyturvakeskus
Lineaarialgebra ja matriisilaskenta II. LM2, Kesä /141
 Lineaarialgebra ja matriisilaskenta II LM2, Kesä 2012 1/141 Kertausta: avaruuden R n vektorit Määritelmä Oletetaan, että n {1, 2, 3,...}. Avaruuden R n alkiot ovat jonoja, joissa on n kappaletta reaalilukuja.
Lineaarialgebra ja matriisilaskenta II LM2, Kesä 2012 1/141 Kertausta: avaruuden R n vektorit Määritelmä Oletetaan, että n {1, 2, 3,...}. Avaruuden R n alkiot ovat jonoja, joissa on n kappaletta reaalilukuja.
Yhtälöryhmät 1/6 Sisältö ESITIEDOT: yhtälöt
 Yhtälöryhmät 1/6 Sisältö Yhtälöryhmä Yhtälöryhmässä on useita yhtälöitä ja yleensä myös useita tuntemattomia. Tavoitteena on löytää tuntemattomille sellaiset arvot, että kaikki yhtälöt toteutuvat samanaikaisesti.
Yhtälöryhmät 1/6 Sisältö Yhtälöryhmä Yhtälöryhmässä on useita yhtälöitä ja yleensä myös useita tuntemattomia. Tavoitteena on löytää tuntemattomille sellaiset arvot, että kaikki yhtälöt toteutuvat samanaikaisesti.
5 Lineaariset yhtälöryhmät
 5 Lineaariset yhtälöryhmät Edellisen luvun lopun esimerkissä päädyttiin yhtälöryhmään, jonka ratkaisemisesta riippui, kuuluuko tietty vektori eräiden toisten vektorien virittämään aliavaruuteen Tämäntyyppisiä
5 Lineaariset yhtälöryhmät Edellisen luvun lopun esimerkissä päädyttiin yhtälöryhmään, jonka ratkaisemisesta riippui, kuuluuko tietty vektori eräiden toisten vektorien virittämään aliavaruuteen Tämäntyyppisiä
DEE Sähkötekniikan perusteet
 DEE-11110 Sähkötekniikan perusteet Antti Stenvall Tasasähköpiirien systemaattinen ratkaisu: kerrostamismenetelmä, silmukkavirtamenetelmä, solmupistemenetelmä Luennon keskeinen termistö ja tavoitteet silmukkavirtamenetelmä
DEE-11110 Sähkötekniikan perusteet Antti Stenvall Tasasähköpiirien systemaattinen ratkaisu: kerrostamismenetelmä, silmukkavirtamenetelmä, solmupistemenetelmä Luennon keskeinen termistö ja tavoitteet silmukkavirtamenetelmä
Luento 5: Suurten lineaaristen yhtälöryhmien ratkaiseminen iteratiivisilla menetelmillä
 Luento 5: Suurten lineaaristen yhtälöryhmien ratkaiseminen iteratiivisilla menetelmillä Matriisit voivat olla kooltaan niin suuria, että LU-hajotelman laskeminen ei ole järkevä tapa ratkaista lineaarista
Luento 5: Suurten lineaaristen yhtälöryhmien ratkaiseminen iteratiivisilla menetelmillä Matriisit voivat olla kooltaan niin suuria, että LU-hajotelman laskeminen ei ole järkevä tapa ratkaista lineaarista
4 Matemaattinen induktio
 4 Matemaattinen induktio Joidenkin väitteiden todistamiseksi pitää näyttää, että kaikilla luonnollisilla luvuilla on jokin ominaisuus P. Esimerkkejä tällaisista väitteistä ovat vaikkapa seuraavat: kaikilla
4 Matemaattinen induktio Joidenkin väitteiden todistamiseksi pitää näyttää, että kaikilla luonnollisilla luvuilla on jokin ominaisuus P. Esimerkkejä tällaisista väitteistä ovat vaikkapa seuraavat: kaikilla
, on säännöllinen 2-ulotteinen pinta. Määrää T x0 pisteessä x 0 = (0, 1, 1).
.") HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi II, syksy 017 Harjoitus 4 Ratkaisuehdotukset 4.1. Osoita, että tasa-arvojoukko S F (0), F : R 3 R, F (x) = 3x 1 x 3 + e x + x e x 3, on säännöllinen
HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi II, syksy 017 Harjoitus 4 Ratkaisuehdotukset 4.1. Osoita, että tasa-arvojoukko S F (0), F : R 3 R, F (x) = 3x 1 x 3 + e x + x e x 3, on säännöllinen
Osakesalkun optimointi
 Osakesalkun optimointi Anni Halkola Epäsileä optimointi Turun yliopisto Huhtikuu 2016 Sisältö 1 Johdanto 1 2 Taustatietoja 2 3 Laskumetodit 3 3.1 Optimointiongelmat........................ 4 4 Epäsileän
Osakesalkun optimointi Anni Halkola Epäsileä optimointi Turun yliopisto Huhtikuu 2016 Sisältö 1 Johdanto 1 2 Taustatietoja 2 3 Laskumetodit 3 3.1 Optimointiongelmat........................ 4 4 Epäsileän
Luento 11: Rajoitusehdot. Ulkopistemenetelmät
 Luento 11: Rajoitusehdot. Ulkopistemenetelmät ja sisäpistemenetelmät Lagrangen välttämättömien ehtojen ratkaiseminen Newtonin menetelmällä Jos tehtävässä on vain yhtälörajoituksia, voidaan minimipistekandidaatteja
Luento 11: Rajoitusehdot. Ulkopistemenetelmät ja sisäpistemenetelmät Lagrangen välttämättömien ehtojen ratkaiseminen Newtonin menetelmällä Jos tehtävässä on vain yhtälörajoituksia, voidaan minimipistekandidaatteja
Lineaarikombinaatio, lineaarinen riippuvuus/riippumattomuus
 Lineaarikombinaatio, lineaarinen riippuvuus/riippumattomuus 1 / 51 Lineaarikombinaatio Johdattelua seuraavaan asiaan (ei tarkkoja määritelmiä): Millaisen kuvan muodostaa joukko {λv λ R, v R 3 }? Millaisen
Lineaarikombinaatio, lineaarinen riippuvuus/riippumattomuus 1 / 51 Lineaarikombinaatio Johdattelua seuraavaan asiaan (ei tarkkoja määritelmiä): Millaisen kuvan muodostaa joukko {λv λ R, v R 3 }? Millaisen
ax + y + 2z = 0 2x + y + az = b 2. Kuvassa alla on esitetty nesteen virtaus eräässä putkistossa.
 BM20A5800 Funktiot, lineaarialgebra ja vektorit Harjoitus 7, Syksy 206 Tutkitaan yhtälöryhmää x + y + z 0 2x + y + az b ax + y + 2z 0 (a) Jos a 0 ja b 0 niin mikä on yhtälöryhmän ratkaisu? Tulkitse ratkaisu
BM20A5800 Funktiot, lineaarialgebra ja vektorit Harjoitus 7, Syksy 206 Tutkitaan yhtälöryhmää x + y + z 0 2x + y + az b ax + y + 2z 0 (a) Jos a 0 ja b 0 niin mikä on yhtälöryhmän ratkaisu? Tulkitse ratkaisu
MS-C1350 Osittaisdifferentiaaliyhtälöt Harjoitukset 5, syksy Mallivastaukset
 MS-C350 Osittaisdifferentiaaliyhtälöt Haroitukset 5, syksy 207. Oletetaan, että a > 0 a funktio u on yhtälön u a u = 0 ratkaisu. a Osoita, että funktio vx, t = u x, t toteuttaa yhtälön a v = 0. b Osoita,
MS-C350 Osittaisdifferentiaaliyhtälöt Haroitukset 5, syksy 207. Oletetaan, että a > 0 a funktio u on yhtälön u a u = 0 ratkaisu. a Osoita, että funktio vx, t = u x, t toteuttaa yhtälön a v = 0. b Osoita,
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA. Jouko Esko n85748 Juho Jaakkola n86633. Dynaaminen Kenttäteoria GENERAATTORI.
 VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Jouko Esko n85748 Juho Jaakkola n86633 Dynaaminen Kenttäteoria GENERAATTORI Sivumäärä: 10 Jätetty tarkastettavaksi: 06.03.2008 Työn tarkastaja Maarit
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Jouko Esko n85748 Juho Jaakkola n86633 Dynaaminen Kenttäteoria GENERAATTORI Sivumäärä: 10 Jätetty tarkastettavaksi: 06.03.2008 Työn tarkastaja Maarit
Esimerkki 19. Esimerkissä 16 miniminormiratkaisu on (ˆx 1, ˆx 2 ) = (1, 0).
 = (1, 0).") Esimerkki 9 Esimerkissä 6 miniminormiratkaisu on (ˆx, ˆx (, 0 Seuraavaksi näytetään, että miniminormiratkaisuun siirtyminen poistaa likimääräisongelman epäyksikäsitteisyyden (mutta lisääntyvän ratkaisun
Esimerkki 9 Esimerkissä 6 miniminormiratkaisu on (ˆx, ˆx (, 0 Seuraavaksi näytetään, että miniminormiratkaisuun siirtyminen poistaa likimääräisongelman epäyksikäsitteisyyden (mutta lisääntyvän ratkaisun
Määritelmä Olkoon T i L (V i, W i ), 1 i m. Yksikäsitteisen lineaarikuvauksen h L (V 1 V 2 V m, W 1 W 2 W m )
, 1 i m. Yksikäsitteisen lineaarikuvauksen h L (V 1 V 2 V m, W 1 W 2 W m )") Määritelmä 519 Olkoon T i L V i, W i, 1 i m Yksikäsitteisen lineaarikuvauksen h L V 1 V 2 V m, W 1 W 2 W m h v 1 v 2 v m T 1 v 1 T 2 v 2 T m v m 514 sanotaan olevan kuvausten T 1,, T m indusoima ja sitä
Määritelmä 519 Olkoon T i L V i, W i, 1 i m Yksikäsitteisen lineaarikuvauksen h L V 1 V 2 V m, W 1 W 2 W m h v 1 v 2 v m T 1 v 1 T 2 v 2 T m v m 514 sanotaan olevan kuvausten T 1,, T m indusoima ja sitä
Dynaamiset regressiomallit
 MS-C2128 Ennustaminen ja Aikasarja-analyysi, Lauri Viitasaari Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Syksy 2016 Tilastolliset aikasarjat voidaan jakaa kahteen
MS-C2128 Ennustaminen ja Aikasarja-analyysi, Lauri Viitasaari Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Syksy 2016 Tilastolliset aikasarjat voidaan jakaa kahteen
Lineaarialgebra ja matriisilaskenta I, HY Kurssikoe Ratkaisuehdotus. 1. (35 pistettä)
") Lineaarialgebra ja matriisilaskenta I, HY Kurssikoe 26.10.2017 Ratkaisuehdotus 1. (35 pistettä) (a) Seuraavat matriisit on saatu eräistä yhtälöryhmistä alkeisrivitoimituksilla. Kuinka monta ratkaisua yhtälöryhmällä
Lineaarialgebra ja matriisilaskenta I, HY Kurssikoe 26.10.2017 Ratkaisuehdotus 1. (35 pistettä) (a) Seuraavat matriisit on saatu eräistä yhtälöryhmistä alkeisrivitoimituksilla. Kuinka monta ratkaisua yhtälöryhmällä
Derivaatat lasketaan komponenteittain, esimerkiksi E 1 E 2
 MS-C50 Osittaisdifferentiaaliyhtälöt Harjoitukset syksy 07. Oletetaan että vektorikenttä E E E E : R R on kaksi kertaa jatkuvasti derivoituva E C R. Näytä että E E. Derivaatat lasketaan komponenteittain
MS-C50 Osittaisdifferentiaaliyhtälöt Harjoitukset syksy 07. Oletetaan että vektorikenttä E E E E : R R on kaksi kertaa jatkuvasti derivoituva E C R. Näytä että E E. Derivaatat lasketaan komponenteittain
Lineaarialgebra ja differentiaaliyhtälöt Laskuharjoitus 1 / vko 44
 Lineaarialgebra ja differentiaaliyhtälöt Laskuharjoitus 1 / vko 44 Tehtävät 1-3 lasketaan alkuviikon harjoituksissa, verkkotehtävien dl on lauantaina aamuyöllä. Tehtävät 4 ja 5 lasketaan loppuviikon harjoituksissa.
Lineaarialgebra ja differentiaaliyhtälöt Laskuharjoitus 1 / vko 44 Tehtävät 1-3 lasketaan alkuviikon harjoituksissa, verkkotehtävien dl on lauantaina aamuyöllä. Tehtävät 4 ja 5 lasketaan loppuviikon harjoituksissa.
7 Vapaus. 7.1 Vapauden määritelmä
 7 Vapaus Kuten edellisen luvun lopussa mainittiin, seuraavaksi pyritään ratkaisemaan, onko annetussa aliavaruuden virittäjäjoukossa tarpeettomia vektoreita Jos tällaisia ei ole, virittäjäjoukkoa kutsutaan
7 Vapaus Kuten edellisen luvun lopussa mainittiin, seuraavaksi pyritään ratkaisemaan, onko annetussa aliavaruuden virittäjäjoukossa tarpeettomia vektoreita Jos tällaisia ei ole, virittäjäjoukkoa kutsutaan
BM20A0900, Matematiikka KoTiB3
 BM20A0900, Matematiikka KoTiB3 Luennot: Matti Alatalo Oppikirja: Kreyszig, E.: Advanced Engineering Mathematics, 8th Edition, John Wiley & Sons, 1999, luvut 1 4. 1 Sisältö Ensimmäisen kertaluvun differentiaaliyhtälöt
BM20A0900, Matematiikka KoTiB3 Luennot: Matti Alatalo Oppikirja: Kreyszig, E.: Advanced Engineering Mathematics, 8th Edition, John Wiley & Sons, 1999, luvut 1 4. 1 Sisältö Ensimmäisen kertaluvun differentiaaliyhtälöt
Kokonaislukuoptimointi
 Kokonaislukuoptimointi Algebrallisen geometrian sovelluksia Sisältö Taustaa algebrallisesta geometriasta Gröbnerin kanta Buchbergerin algoritmi Kokonaislukuoptimointi Käypyysongelma Algoritmi ratkaisun
Kokonaislukuoptimointi Algebrallisen geometrian sovelluksia Sisältö Taustaa algebrallisesta geometriasta Gröbnerin kanta Buchbergerin algoritmi Kokonaislukuoptimointi Käypyysongelma Algoritmi ratkaisun
Tfy Fysiikka IIB Mallivastaukset
 Tfy-.14 Fysiikka B Mallivastaukset 14.5.8 Tehtävä 1 a) Lenin laki: Muuttuvassa magneettikentässä olevaan virtasilmukkaan inusoitunut sähkömotorinen voima on sellainen, että siihen liittyvän virran aiheuttama
Tfy-.14 Fysiikka B Mallivastaukset 14.5.8 Tehtävä 1 a) Lenin laki: Muuttuvassa magneettikentässä olevaan virtasilmukkaan inusoitunut sähkömotorinen voima on sellainen, että siihen liittyvän virran aiheuttama
Regressioanalyysi. Vilkkumaa / Kuusinen 1
 Regressioanalyysi Vilkkumaa / Kuusinen 1 Regressioanalyysin idea ja tavoitteet Regressioanalyysin idea: Halutaan selittää selitettävän muuttujan havaittujen arvojen vaihtelua selittävien muuttujien havaittujen
Regressioanalyysi Vilkkumaa / Kuusinen 1 Regressioanalyysin idea ja tavoitteet Regressioanalyysin idea: Halutaan selittää selitettävän muuttujan havaittujen arvojen vaihtelua selittävien muuttujien havaittujen
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 9 1 Implisiittinen derivointi Tarkastellaan nyt yhtälöä F(x, y) = c, jossa x ja y ovat muuttujia ja c on vakio Esimerkki tällaisesta yhtälöstä on x 2 y 5 + 5xy = 14
Matematiikan tukikurssi Kurssikerta 9 1 Implisiittinen derivointi Tarkastellaan nyt yhtälöä F(x, y) = c, jossa x ja y ovat muuttujia ja c on vakio Esimerkki tällaisesta yhtälöstä on x 2 y 5 + 5xy = 14
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 3: Vektorikentät
 MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 3: Vektorikentät Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 2016 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2016
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 3: Vektorikentät Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 2016 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2016
Derivointiesimerkkejä 2
 Derivointiesimerkkejä 2 (2.10.2008 versio 2.0) Parametrimuotoisen funktion erivointi Esimerkki 1 Kappale kulkee pitkin rataa { x(t) = sin 2 t y(t) = cos t. Määritetään raan suuntakulma positiiviseen x-akseliin
Derivointiesimerkkejä 2 (2.10.2008 versio 2.0) Parametrimuotoisen funktion erivointi Esimerkki 1 Kappale kulkee pitkin rataa { x(t) = sin 2 t y(t) = cos t. Määritetään raan suuntakulma positiiviseen x-akseliin
3 = Lisäksi z(4, 9) = = 21, joten kysytty lineaarinen approksimaatio on. L(x,y) =
 = = 21, joten kysytty lineaarinen approksimaatio on. L(x,y) =") BM20A5810 Differentiaalilaskenta ja sovellukset Harjoitus 6, Syksy 2016 1. (a) Olkoon z = z(x,y) = yx 1/2 + y 1/2. Muodosta z:lle lineaarinen approksimaatio L(x,y) siten että approksimaation ja z:n arvot
BM20A5810 Differentiaalilaskenta ja sovellukset Harjoitus 6, Syksy 2016 1. (a) Olkoon z = z(x,y) = yx 1/2 + y 1/2. Muodosta z:lle lineaarinen approksimaatio L(x,y) siten että approksimaation ja z:n arvot
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 9: Greenin lause
 MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 9: Greenin lause Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2015 1 / 19 Esimerkki Olkoon F : R 3 R 3 vakiofunktio
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 9: Greenin lause Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2015 1 / 19 Esimerkki Olkoon F : R 3 R 3 vakiofunktio
Kvanttifysiikan perusteet 2017
 Kvanttifysiikan perusteet 207 Harjoitus 2: ratkaisut Tehtävä Osoita hyödyntäen Maxwellin yhtälöitä, että tyhjiössä magneettikenttä ja sähkökenttä toteuttavat aaltoyhtälön, missä aallon nopeus on v = c.
Kvanttifysiikan perusteet 207 Harjoitus 2: ratkaisut Tehtävä Osoita hyödyntäen Maxwellin yhtälöitä, että tyhjiössä magneettikenttä ja sähkökenttä toteuttavat aaltoyhtälön, missä aallon nopeus on v = c.
Regressioanalyysi. Kuusinen/Heliövaara 1
 Regressioanalyysi Kuusinen/Heliövaara 1 Regressioanalyysin idea ja tavoitteet Regressioanalyysin idea: Oletetaan, että haluamme selittää jonkin selitettävän muuttujan havaittujen arvojen vaihtelun joidenkin
Regressioanalyysi Kuusinen/Heliövaara 1 Regressioanalyysin idea ja tavoitteet Regressioanalyysin idea: Oletetaan, että haluamme selittää jonkin selitettävän muuttujan havaittujen arvojen vaihtelun joidenkin
MS-A0003/A0005 Matriisilaskenta Laskuharjoitus 2 / vko 45
 MS-A0003/A0005 Matriisilaskenta Laskuharjoitus / vko 5 Tehtävä 1 (L): Hahmottele kompleksitasoon ne pisteet, jotka toteuttavat a) z 3 =, b) z + 3 i < 3, c) 1/z >. Yleisesti: ehto z = R, z C muodostaa kompleksitasoon
MS-A0003/A0005 Matriisilaskenta Laskuharjoitus / vko 5 Tehtävä 1 (L): Hahmottele kompleksitasoon ne pisteet, jotka toteuttavat a) z 3 =, b) z + 3 i < 3, c) 1/z >. Yleisesti: ehto z = R, z C muodostaa kompleksitasoon
 1 0.5 0 0.5 1 1.5 0 0.2 0.4 0.6 0.8 1 Kuva 1.13: Ultraäänikuvauksen periaate 2. Taaksepäin sironnut pulssi (kuvassa sininen käyrä) vastaanotetaan ja muunnetaan alla oleviksi kirkkausarvoiksi verhokäyrän
1 0.5 0 0.5 1 1.5 0 0.2 0.4 0.6 0.8 1 Kuva 1.13: Ultraäänikuvauksen periaate 2. Taaksepäin sironnut pulssi (kuvassa sininen käyrä) vastaanotetaan ja muunnetaan alla oleviksi kirkkausarvoiksi verhokäyrän
3.1 Lineaarikuvaukset. MS-A0004/A0006 Matriisilaskenta. 3.1 Lineaarikuvaukset. 3.1 Lineaarikuvaukset
 31 MS-A0004/A0006 Matriisilaskenta 3 Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2292015 Lineaariset yhtälöt ovat vektoreille luonnollisia yhtälöitä, joita
31 MS-A0004/A0006 Matriisilaskenta 3 Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2292015 Lineaariset yhtälöt ovat vektoreille luonnollisia yhtälöitä, joita
Mapu 1. Laskuharjoitus 3, Tehtävä 1
 Mapu. Laskuharjoitus 3, Tehtävä Lineaarisessa approksimaatiossa funktion arvoa lähtöpisteen x 0 ympäristössä arvioidaan liikkumalla lähtöpisteeseen sovitetun tangentin kulmakertoimen mukaisesti: f(x 0
Mapu. Laskuharjoitus 3, Tehtävä Lineaarisessa approksimaatiossa funktion arvoa lähtöpisteen x 0 ympäristössä arvioidaan liikkumalla lähtöpisteeseen sovitetun tangentin kulmakertoimen mukaisesti: f(x 0
=p(x) + p(y), joten ehto (N1) on voimassa. Jos lisäksi λ on skalaari, niin
 + p(y), joten ehto (N1) on voimassa. Jos lisäksi λ on skalaari, niin") FUNKTIONAALIANALYYSI, RATKAISUT 1 KEVÄT 211, (AP) 1. Ovatko seuraavat reaaliarvoiset funktiot p : R 3 R normeja? Ovatko ne seminormeja? ( x = (x 1, x 2, x 3 ) R 3 ) a) p(x) := x 2 1 + x 2 2 + x 2 3, b)
FUNKTIONAALIANALYYSI, RATKAISUT 1 KEVÄT 211, (AP) 1. Ovatko seuraavat reaaliarvoiset funktiot p : R 3 R normeja? Ovatko ne seminormeja? ( x = (x 1, x 2, x 3 ) R 3 ) a) p(x) := x 2 1 + x 2 2 + x 2 3, b)
Jakso 8. Ampèren laki. B-kentän kenttäviivojen piirtäminen
 Jakso 8. Ampèren laki Esimerkki 8.: Johda pitkän suoran virtajohtimen (virta ) aiheuttaman magneettikentän lauseke johtimen ulkopuolella etäisyydellä r johtimesta. Ratkaisu: Käytetään Ampèren lakia C 0
Jakso 8. Ampèren laki Esimerkki 8.: Johda pitkän suoran virtajohtimen (virta ) aiheuttaman magneettikentän lauseke johtimen ulkopuolella etäisyydellä r johtimesta. Ratkaisu: Käytetään Ampèren lakia C 0
(b) Tunnista a-kohdassa saadusta riippuvuudesta virtausmekaniikassa yleisesti käytössä olevat dimensiottomat parametrit.
 Tunnista a-kohdassa saadusta riippuvuudesta virtausmekaniikassa yleisesti käytössä olevat dimensiottomat parametrit.") Tehtävä 1 Oletetaan, että ruiskutussuuttimen nestepisaroiden halkaisija d riippuu suuttimen halkaisijasta D, suihkun nopeudesta V sekä nesteen tiheydestä ρ, viskositeetista µ ja pintajännityksestä σ. (a)
Tehtävä 1 Oletetaan, että ruiskutussuuttimen nestepisaroiden halkaisija d riippuu suuttimen halkaisijasta D, suihkun nopeudesta V sekä nesteen tiheydestä ρ, viskositeetista µ ja pintajännityksestä σ. (a)
Kaksiluokkainen tapaus, lineaarinen päätöspinta, lineaarisesti erottuvat luokat
 1 Tukivektoriluokittelija Tukivektorikoneeseen (support vector machine) perustuva luoikittelija on tilastollisen koneoppimisen teoriaan perustuva lineaarinen luokittelija. Perusajatus on sovittaa kahden
1 Tukivektoriluokittelija Tukivektorikoneeseen (support vector machine) perustuva luoikittelija on tilastollisen koneoppimisen teoriaan perustuva lineaarinen luokittelija. Perusajatus on sovittaa kahden
Kuvaus. Määritelmä. LM2, Kesä /160
 Kuvaus Määritelmä Oletetaan, että X ja Y ovat joukkoja. Kuvaus eli funktio joukosta X joukkoon Y on sääntö, joka liittää jokaiseen joukon X alkioon täsmälleen yhden alkion, joka kuuluu joukkoon Y. Merkintä
Kuvaus Määritelmä Oletetaan, että X ja Y ovat joukkoja. Kuvaus eli funktio joukosta X joukkoon Y on sääntö, joka liittää jokaiseen joukon X alkioon täsmälleen yhden alkion, joka kuuluu joukkoon Y. Merkintä
Lineaarikuvauksen R n R m matriisi
 Lineaarikuvauksen R n R m matriisi Lauseessa 21 osoitettiin, että jokaista m n -matriisia A vastaa lineaarikuvaus L A : R n R m, jolla L A ( v) = A v kaikilla v R n. Osoitetaan seuraavaksi käänteinen tulos:
Lineaarikuvauksen R n R m matriisi Lauseessa 21 osoitettiin, että jokaista m n -matriisia A vastaa lineaarikuvaus L A : R n R m, jolla L A ( v) = A v kaikilla v R n. Osoitetaan seuraavaksi käänteinen tulos:
x = ( θ θ ia y = ( ) x.
 x.") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2429 Systeemien Identifiointi 5 harjoituksen ratkaisut Esitetään ensin systeemi tilayhtälömuodossa Tiloiksi valitaan
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2429 Systeemien Identifiointi 5 harjoituksen ratkaisut Esitetään ensin systeemi tilayhtälömuodossa Tiloiksi valitaan
Vapaus. Määritelmä. Vektorijono ( v 1, v 2,..., v k ) on vapaa eli lineaarisesti riippumaton, jos seuraava ehto pätee:
 on vapaa eli lineaarisesti riippumaton, jos seuraava ehto pätee:") Vapaus Määritelmä Oletetaan, että v 1, v 2,..., v k R n, missä n {1, 2,... }. Vektorijono ( v 1, v 2,..., v k ) on vapaa eli lineaarisesti riippumaton, jos seuraava ehto pätee: jos c 1 v 1 + c 2 v 2 +
Vapaus Määritelmä Oletetaan, että v 1, v 2,..., v k R n, missä n {1, 2,... }. Vektorijono ( v 1, v 2,..., v k ) on vapaa eli lineaarisesti riippumaton, jos seuraava ehto pätee: jos c 1 v 1 + c 2 v 2 +
JAKSO 2 KANTA JA KOORDINAATIT
 JAKSO 2 KANTA JA KOORDINAATIT Kanta ja dimensio Tehtävä Esittele vektoriavaruuden kannan määritelmä vapauden ja virittämisen käsitteiden avulla ja anna vektoriavaruuden dimension määritelmä Esittele Lause
JAKSO 2 KANTA JA KOORDINAATIT Kanta ja dimensio Tehtävä Esittele vektoriavaruuden kannan määritelmä vapauden ja virittämisen käsitteiden avulla ja anna vektoriavaruuden dimension määritelmä Esittele Lause
5.1. Normi ja suppeneminen Vektoriavaruus V on normiavaruus, jos siinä on määritelty normi : V R + = [0, ) jolla on ominaisuudet:
 jolla on ominaisuudet:") 5.. Normi ja suppeneminen Vektoriavaruus V on normiavaruus, jos siinä on määritelty normi : V R + = [, ) jolla on ominaisuudet: x = x = x + y x + y, x, y V a x = a x, x V, a K (= R tai C) Esimerkki 5..
5.. Normi ja suppeneminen Vektoriavaruus V on normiavaruus, jos siinä on määritelty normi : V R + = [, ) jolla on ominaisuudet: x = x = x + y x + y, x, y V a x = a x, x V, a K (= R tai C) Esimerkki 5..