Differentiaali-interferometria ja sen soveltaminen jäätiköiden tutkimukseen
|
|
|
- Marja-Leena Niemi
- 10 vuotta sitten
- Katselukertoja:
Transkriptio
1 Differentiaali-interferometria ja sen soveltaminen jäätiköiden tutkimukseen Esimerkkitapaus: Svartisen Maa Erikoistyö Kirsi Karila 50825A

2 1. Johdanto SAR-tutkakuvan ominaisuuksia Häilyntä Layover, foreshortening ja varjot SAR-interferometria Kuvausgeometria Prosessointi SAR-kuvan vaihetieto Koherenssi Sovellukset Differentiaali-interferometria (DINSAR) DINSAR kahdella, kolmella ja neljällä kuvalla Kaavat Prosessointi Rajoitukset Gradientti-interferometria (GINSAR) GINSAR:n perusidea ja topogrammin muodostaminen Kaltevuuskartan luominen Nopeuskartan luominen Rajoitukset Edut DINSAR-kokeilu Svartisen-jäätiköllä Testiaineisto Prosessointi Tulosten arviointi Johtopäätökset

3 1. Johdanto Sähkömagneettisen signaalin vaihe ja voimakkuus voidaan mitata SAR-tutkalla. SARinterferometriassa (INSAR) kohteesta kahteen eri paikoissa oleviin antenneihin takaisinsiroavien signaalien vaihe-ero lasketaan ja niistä muodostetaan interferogrammi. Interferogrammi sisältää tietoa kohteen topografiasta ja kohteessa kuvien oton välillä tapahtuneesta liikkeestä. SARinterferometrian perusteet on esitetty luvussa 3. Maapallon jäätiköt ovat herkkiä ilmastossa tapahtuville muutoksille. Erityisesti ympäristön keskilämpötilan ja sademäärän muutokset näkyvät jäätiköissä. Napajäätiköt reagoivat muutoksiin hitaasti, mutta tilavuudeltaan pienemmät vuoristojäätiköt reagoivat jo pienen aikavälin muutoksiin. Siksi on tärkeää saada tietää niiden jäämassan liikkeistä ja muutoksista. [URL1] Tarkka korkeusmalli alueelta on jäätiköiden tutkimuksen perusta, koska sen avulla voidaan arvioida jään liikkeitä. Usein tarkkoja topografisia karttoja jäätikköalueilta ei kuitenkaan ole saatavilla, niiden hankalan sijainnin takia. SAR-interferometrialla alueelta voidaan muodostaa kattava ja riittävän tarkka korkeusmalli. [URL1] Differentiaali-interferometria (DINSAR) on menetelmä, jossa interferogrammista poistetaan topografian aiheuttamat vaihekuviot toisen interferogrammin tai korkeusmallin avulla, jolloin voidaan havaita kohteessa tapahtunut pienikin liike. Differentiaali-interferometrian avulla jään liikkeet voidaan mitata suoraan satelliittikuvilta ilman maanpinnalla olevia tukipisteitä ja ilman entuudestaan tunnettua korkeusmallia. DINSAR-tekniikkaa käsittelee luku 4 ja sen sovelluksesta Norjassa sijaitsevan Svartisen-jäätikön liikkeen havaitsemiseen kerrotaan luvussa 6. Gradientti-interferometria (GINSAR) on kehitetty vaihtoehdoksi differentiaali-interferometrialle jäätiköiden liikkeen mittaamiseen. Tekniikassa käytetään interferometrisen vaiheen gradientteja kohteen kaltevuuskarttojen tuottamiseen. Vähentämällä kaltevuuskarttoja toisistaan voidaan muodostaa kohteen liikekartta. Menetelmä on esitetty luvussa 5. 2

4 2. SAR-tutkakuvan ominaisuuksia SAR eli synteettisen apertuurin tutka (Synthetic Aperture Radar) on kuvaava tutka, joka pystyy tuottamaan kuvia hyvällä spatiaalisella erotuskyvyllä hyödyntämällä kuvausalustan liikettä signaalin prosessoinnissa. SAR-tutka lähettää kohteeseen mikroaaltopulsseja ja mittaa takaisin sironneen säteilyn amplitudia ja vaihetta. Kuvausalustana toimii yleensä lentokone tai satelliitti. Lentosuuntaa kutsutaan atsimuuttisuunnaksi (azimuth direction) ja lentosuuntaa vastaan kohtisuoraa suuntaa etäisyyssuunnaksi (range direction). Perinteinen tutkakuva sisältää vain tietoa takaisin sironneen pulssin voimakkuudesta eli intensiteetistä. SAR-tutkan kuvaussysteemin tärkein ominaisuus on sen koherenttisuus eli takaisin sironneesta pulssista tallennetaan sekä amplitudi- että vaihetieto. Kompleksisen SAR-kuvan pikselin arvo voidaan ilmaista napakoordinaateissa seuraavasti: Z x y I x y e i φ ( (, ) (, ) x, y ) =, (1) missä I on pikselin intensiteetti, φ on vaihe ja ( kuvakoordinaatit. X-koordinaatti yhtyy lentosuuntaan ja y-koordinaatti kuvaussuuntaan. [1] 2.1 Häilyntä (speckle noise) Koska yhden pikselin alueella kohteessa on monta erilaista ja eri asennoissa olevaa sirottajaa, tulee pikselin arvoksi näiden takaisinsironnan summa. Häilyntä näkyy amplitudikuvilla suola-ja-pippuri - kuviona. Keskiarvoistamalla pikseleitä voidaan saada kullekin kohdetyypille ominainen sironta. Häilyntä tekee myös yhden pikselin vaiheesta käytännössä satunnaisen. 2.2 Layover, foreshortening ja varjot SAR-tutka mittaa etäisyyden tutkan antennista kohteeseen (slant-range distance). Tämä etäisyys voidaan muuttaa kohteiden väliseksi maaetäisyydeksi (ground range). Etäisyyden mittaustavasta johtuen maanpinnan korkeusvaihtelut aiheuttavat vääristymiä tuloksena saatavaan SAR-kuvaan. Mitä korkeampi kohde on, sitä lähempänä se on tutkaa. Tästä johtuen tutkaan päin olevat rinteet näyttävät kuvilla todellista lyhyemmiltä (foreshortening) ja ovat ympäristöään kirkkaampia kuvilla, koska rinteestä heijastunut energia pakkautuu pienemmälle alueelle kuvaa. Tutkasta poispäin olevat rinteet näyttävät vastaavasti todellista pitemmiltä ja ovat tummempia. Kun tutkaan päin olevan rinteen kaltevuus on suurempi kuin tutkan katselukulma, kohteen huippu on lähempänä tutkaa kuin sen alaosa ja huippu kuvautuu ennen alaosaa (layover). Kun tutkasta pois päin olevan rinteen kaltevuus on suurempi kuin tutkan katselukulma, kohde ei kuvaudu kuvalle vaan jää varjoon (shadow), ja vastaava alue kuvalla sisältää vain kohinaa. [1] 3


5 Kuva 1 INSAR kuvausgeometria. A1 ja A2 ovat antennit. 4
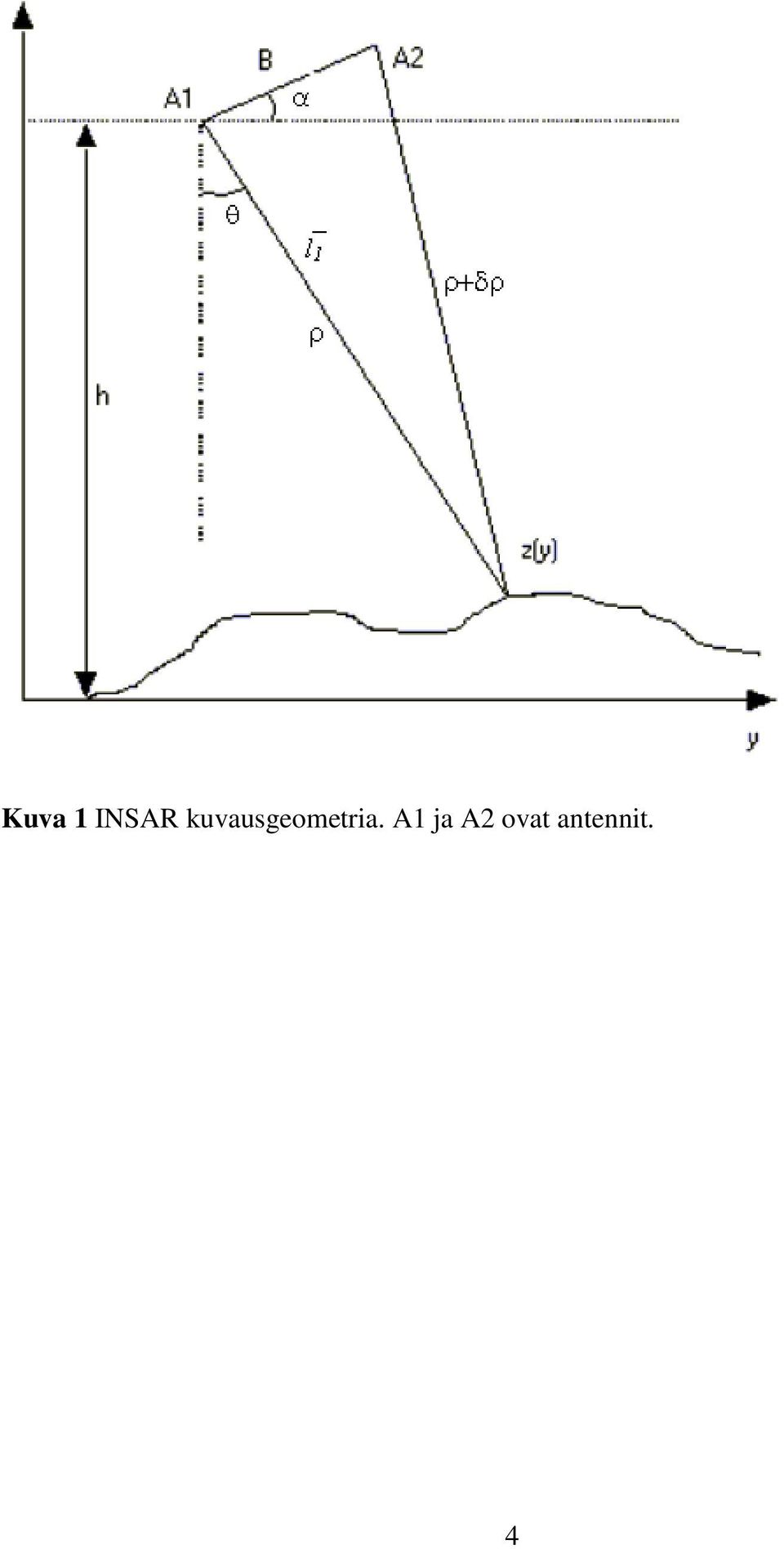
6 3. SAR-interferometria Yhden SAR-kuvan vaiheinformaatio on lähes käyttökelvotonta häilynnän takia. SARinterferometriassa käytetäänkin kahta samalta alueelta hieman eri kuvausalustan paikoista otettua SAR-kuvaa. Niiden vaihe-eroa voidaan käyttää hyväksi, koska niillä on samanlainen häilyntäkuvio. Vaihe-erokuvaa kutsutaan interferogrammiksi. [1] Kuvat voidaan ottaa samanaikaisesti kahdella samalla alustalla olevalla antennilla (single-pass INSAR) tai lentämällä kahdesti yhdellä antennilla, kuvausalustan toistaessa likimain samaa rataa (repeat-pass INSAR). Topografiseen kartoitukseen suunnitellut järjestelmät perustuvat yleensä kahden antennin käyttöön, kun taas muutosten seurannassa yhden antennin järjestelmien ottamat kuvat ovat hyödyllisiä. [2] 3.1 Kuvausgeometria Kuvassa 1 z on pinnan korkeus referenssipinnasta, B on kannan pituus eli antennien välinen etäisyys, h on tutkan korkeus, ρ on etäisyys maanpinnalle ja θ on tutkan katselukulma. Etäisyys ρ tutkasta kuvapisteeseen katseluvektorin l suunnassa saadaan tutkasignaalin viiveestä. Jos kuvausgeometria tunnetaan riittävällä tarkkuudella, maaston korkeus z voidaan saada seuraavasti [1]: z = h ρ cosθ Kosinilauseen mukaan saadaan [1] ( ρ + δρ) 2 2 = ρ + B 2 2 = ρ + B + 2ρB sin( α θ ) 2 2ρB cos( θ + 90 α) Järjestämällä termit uudelleen saadaan [1] [( ρ + δρ) ρ B ] sin( α θ ) = 2ρB Mitattu vaihe-ero φ antennien välillä on suoraan verrannollinen etäisyyseroon. Etäisyysero δρ repeat-pass -tapauksessa [1] (2) (3) (4) λφ δρ = 4π missä λ on tutkan aallonpituus. (5) Kun oletetaan että vaihe-ero johtuu pelkästä maaston korkeusvaihtelusta, voidaan yhdistämällä yhtälöt (2), (4) ja (5) korkeus z ilmaista havaitun vaiheen ja järjestelmän parametrien funktiona [1]: λφ 2 2 [( ) ] 4π B cosθ z = h 2Bsin( α θ ) 2 λφ ( ) 4π (6) Tämän jälkeen korkeuden z vaihe täytyy vielä purkaa. 5
 tai lentämällä kahdesti yhdellä antennilla, kuvausalustan toistaessa likimain samaa rataa")
7 3.2 Prosessointi Aluksi toinen kuva (slave) on sovitettava osapikselin tarkkuudella yhteen toisen kuvan (master) kanssa. Slave-kuva uudelleennäytteistetään saadun muunnoksen mukaan. Tämän jälkeen kuvilla on sama geometria. Rekisteröinti täytyy suorittaa erittäin tarkasti, jotta kuvan vaihetieto säilyy muuttumattomana. Interferogrammi muodostetaan kertomalla toinen kompleksinen SAR-kuva toisen kuvan kompleksikonjugaatilla [1]: Z int ( = I ( I ( e missä I 1 ja I 2 ovat kuvien 1 ja 2 intensiteetit ja φ 1 ja φ 2 kuvien 1 ja 2 vaiheet. SAR-kuvissa vaihe on rajoittunut välille [0, 2π] ja tieto 2π-vaihesyklien määrästä eli absoluuttisesta vaiheesta on kadonnut. Vaiheenpurku (phase unwrapping) on osa prosessointia ja siihen on kehitetty monia eri algoritmeja. Useimmat algoritmit yrittävät minimoida vaiheen epäjatkuvuuskohtien pituuden puretussa vaihekuvassa. Vaiheen purku on erityisen vaikeaa alueilla, joilla koherenssi on alhainen tai jos kohteessa on nopeita korkeusvaihteluita (layover, shadow). Vaiheen purkamisessa syntyneet virheet tulevat suoraan lopputuotteena saatavaan korkeusmalliin. 3.3 SAR-kuvan vaihetieto 1 2 i( φ1 ( φ2 ( ), Vaihe-ero ei kuitenkaan johdu pelkästään korkeusvaihteluista, vaan vaihe-ero φ kahden pikselin välillä interferogrammissa voidaan ilmaista (7) 4πB n 4πBn 4π 4π φ = R + z + η + κ + Φ + n 2π λρ tanθ λρ sinθ λ λ missä B n on kantavektorin tutkan katselusuuntaa vastaan kohtisuora komponentti ja ρ k on antennin ja maanpinnan pisteen välisten etäisyyksien keskiarvo. Ensimmäinen termi, jossa R on pikselien slant-range -etäisyyksien ero, johtuu SAR-kuvaussysteemin kuvausgeometriasta, ja se voidaan poistaa tasaisen maan korjauskertoimella (flat earth compensation factor). Toinen termi eli topografiatermi ilmaisee vaihe-eron korkeuseron z avulla. Kolmas ja neljäs termi vaikuttavat vain repeat-pass -tapauksessa. Koherentti liike kohteessa η aiheuttaa vaihe-eron, jonka kolmas termi sisältää. Jos ilmakehän ominaisuudet muuttuvat kuvien oton välillä, ilmakehä viivästyttää signaalia eri määrän κ, mikä aiheuttaa neljännen termin vaihe-eron. Φ-termi liittyy kohteen fysikaalisiin ominaisuuksiin ja mitattujen vaihe-erojen epätarkkuuteen. Viimeinen termi sisältää vaiheen kokonaislukutuntemattoman. [3] 3.4 Koherenssi k k SAR-interferometria toimii vain koherenteissa olosuhteissa, jolloin takaisin tulevat signaalit korreloivat keskenään. Kun kuvilla on hyvä koherenssi, niiden häilyntäkuviot ovat samanlaisia. Kahden signaalin tilastollista samanlaisuutta mittaa korrelaatio. Kahden kompleksisen SAR-kuvan Z 1 ja Z 2 koherenssi voidaan määrittää kompleksikorrelaationa [1] (8) γ = E[ Z Z E[ Z * 2 ] ] E[ Z 2 2, ] (9) 6
![Interferogrammi muodostetaan kertomalla toinen kompleksinen SAR-kuva toisen kuvan kompleksikonjugaatilla [1]: Z int ( = I ( I ( e missä I 1 ja I 2 ovat kuvien 1 ja 2 intensiteetit ja φ 1 ja φ 2](/docs-images/44/80370/images/page_7.jpg "kuvien 1 ja 2 vaiheet. SAR-kuvissa vaihe on rajoittunut välille [0, 2π] ja tieto 2π-vaihesyklien määrästä eli absoluuttisesta vaiheesta on kadonnut.")
8 missä E[] on odotusarvo ja * on kompleksikonjugaatti. Koherenssia pienentävät kohteen muuttuminen kuvienoton välillä (temporal decorrelation), laitteiston lämpökohina (thermal decorrelation), kantavektorin pituuden kasvattaminen (spatial baseline decorrelation) ja kohteen kiertyminen tutkan katselusuuntaan nähden. Jos kantavektori on liian lyhyt, vaihe-eroista tulee liian pieniä, ja niitä ei pystytä havaitsemaan. Toisaalta, jos kantavektori on liian pitkä, spatiaalinen dekorrelaatio korruptoi signaalin. Temporaalisen dekorrelaation määrä riippuu kohdealueen maaperä- ja kasvillisuustyypistä sekä sään muutoksesta kuvien oton välillä. Jos kohde pysyy muuttumattomana, interferometria on mahdollista hyvinkin pitkällä kuvanottovälillä. Pitkällä tutkan aallonpituudella temporaalinen dekorrelaatio on pienempää kuin lyhyemmällä aallonpituudella. [1] 3.5 Sovellukset SAR-interferometrialla voidaan tuottaa korkeusmalli nopeasti kaikissa sääolosuhteissa vuorokauden ajasta riippumatta. Erityisesti alueilla, joilta on vaikea löytää tunnistettavia piirteitä (tukipisteitä), kuten jäätiköt, SAR-interferometria on stereoskooppisia menetelmiä parempi vaihtoehto digitaalisen korkeusmallin muodostukseen. Lisäksi kuvien koherenssia voidaan käyttää hyväksi maankäytön luokittelussa ja metsätaloudessa. [6] 7

9 4. Differentiaali-interferometria (DINSAR) Differentiaali-interferometriassa tavoitteena on yleensä maanpinnan deformoitumisen mittaaminen käyttäen repeat-pass -interferometriaa. Koska liikkeen aiheuttamat muutokset tulevat suoraan interferogrammiin riippumatta kuvauskannasta, voidaan tapahtunut muutos mitata tutkan aallonpituuden murto-osan tarkkuudella. Käyttämällä usean SAR-kuvan vaihetietoa voidaan mitata kohteessa tapahtuneet pienetkin (~1 mm) muutokset [4]. Differentiaali-interferometrian sovelluksia ovat esimerkiksi maan vajoamisen tai nousun tutkiminen, maanjäristysten aiheuttamien siirtymien ja tulivuorten muodon muuttumisen mittaaminen ja jäätiköiden dynamiikan tutkiminen. [5] Interferogrammissa on tietoa sekä topografiasta että kohteessa kuvaparin kuvien oton välisenä aikana tapahtuneesta liikkeestä. Kun halutaan tietoa vain liikkeestä, topografian aiheuttamat interferenssikäyrät (fringe) on erotettava liikkeen aiheuttamista käyristä, eli vaiheen topografinen komponentti on poistettava interferogrammista. Topografinen vaihe voidaan saada olemassa olevasta korkeusmallista muuntamalla se interferogrammin muotoon (two-pass DINSAR) tai toisesta interferogrammista, joka sisältää vain topografisen vaiheen, eli kohteessa ei ole tapahtunut muutoksia kuvien oton välillä. 4.1 DINSAR kahdella, kolmella ja neljällä kuvalla Kahta kuvaa käytettäessä (two-pass DINSAR) tarvitaan olemassa oleva digitaalinen korkeusmalli, joka muunnetaan tutkan koordinaatistoon ja edelleen interferogrammiksi. Tästä interferogrammista saatava topografinen vaihe vähennetään kuvaparin muodostamasta interferogrammista. Menetelmä on hyvä vaihtoehto silloin, kun alueelta on saatavissa riittävän tarkka korkeusmalli. Korkeusmallin virheet siirtyvät tuloksena saatavaan muutoskarttaan. [6] Kolmen kuvan DINSAR (three-pass DINSAR) perustuu kuvien valitsemiseen siten, että kahden ensimmäisen kuvan välillä ei muutoksia ole tapahtunut (topografinen pari), ja muutokset ovat tapahtuneet toisen ja kolmannen kuvanoton välillä (deformaatiopari). Topografisella parilla kantavektorin pituuden tulisi olla sopiva topografisten vaihteluiden havaitsemiseen eli riittävän pitkä. Sen tulisi olla pidempi kuin deformaatioparin kohtisuorakanta (normal baseline), jotta se olisi deformaatioparia herkempi korkeusvaihteluille. Lisäksi topografisen parin koherenssin on oltava hyvä. Muut kuvat sovitetaan kuvaparien yhteiselle kuvalle. Yhteensovitusta helpottaa se, että kuvilla on valmiiksi sama projektio, orientaatio ja kuvauksesta aiheutuvat vääristymät. Koska pareilla on suuruiset kantavektorit, on topografisen parin kantavektori skaalattava deformaatioparin kantavektorin mukaan [6]. Kolmea kuvaa käytettäessä vältytään ulkopuolisen korkeusmallin yhteensovitukselta master-kuvan kanssa. Lisäksi korkeusmalli on varmasti ajantasainen, kunhan alueella ei ole suuria korkeusvaihteluita, jotka saattavat aiheuttaa virheitä interferometrialla tuotettuun korkeusmalliin. Sopivia kolmikkoja on kuitenkin joskus vaikea saada, ja usein onkin helpompi saada kaksi koherenttia paria. Neljän kuvan DINSAR (four-pass DINSAR) perustuu kahden riippumattoman kuvaparin käyttöön. Näistä toisen oletetaan sisältävän vain vaiheen topografisen komponentin ja toisen sekä topografisen komponentin että liikkeen aiheuttaman vaihekomponentin. Topografisena parina käytetäänkin yleensä ERS1/2-tandemkuvapareja. [URL2] 4.2 Kaavat Yhtälöstä (3) järjestämällä termit uudelleen ja jättämällä pois δρ 2, joka on pieni, saadaan [URL1] B δρ B sin( θ α) + 2ρ 2 (10) 8
![Käyttämällä usean SAR-kuvan vaihetietoa voidaan mitata kohteessa tapahtuneet pienetkin (~1 mm) muutokset [4].](/docs-images/44/80370/images/page_9.jpg "Differentiaali-interferometrian sovelluksia ovat esimerkiksi maan vajoamisen tai nousun tutkiminen, maanjäristysten aiheuttamien siirtymien ja tulivuorten muodon muuttumisen mittaaminen ja")
10 Kuvattaessa satelliitista, voidaan katselusuunnat olettaa likimain yhdensuuntaisiksi ja edellisen yhtälön toinen termi voidaan unohtaa, jolloin saadaan [URL1] δρ Bsin( θ α) Bll missä B ll on kantavektorin tutkan katselusuunnan kanssa yhdensuuntainen komponentti. (11) Yhdistämällä yhtälöt (5) ja (10) saadaan vaiheeksi [URL1] 4π ϕ = B ll λ Toisella interferogrammilla kantavektorin pituus B' ja sen asento α' ovat erisuuruiset kuin ensimmäisellä interferogrammilla, joten myös B ll ' on erisuuruinen. Toisessa interferogrammissa on topografisen vaiheen lisäksi myös siirtymästä johtuva komponentti ρ ja tämän interferogrammin vaihe on siten [URL1] ϕ' 4π ( B λ = ll λ/2:n mittainen siirtymä ρ tutkan katselusuunnassa, aiheuttaa yhden vaihesyklin (fringe) interferogrammiin. Kun topografinen vaihe vähennetään, saadaan yhtälöistä (13) ja (11) [URL1] Näin ollen tutkan katselusuunnan suuntainen siirtymäkomponentti ρ (slant range change) voidaan mitata jokaiselle pisteelle, kun tunnetaan interferogrammien vaiheet ja kuvausgeometria. [URL1] 4.3 Prosessointi Differentiaali-interferogrammin luomiseksi kaksi interferogrammia täytyy sovittaa yhteen. Kolmen SAR-kuvan tapauksessa tämä tehdään käyttämällä yhtä kuvaa referenssikuvana, jolle kaksi muuta kuvaa rekisteröidään ja interpoloidaan. Neljän kuvan DINSAR vaatii rekisteröinnin ja interpoloinnin toistamisen. Aluksi kaksi interferogrammia muodostetaan erikseen ja sen jälkeen toinen interferogrammi kohdistetaan toiselle interferogrammille. [6] Kun kaikki kuvat on oikaistu samaan ruudukkoon, topografisen parin vaihe puretaan ja skaalataan interferogrammien kantavektorien suhteen mukaan. Tämän jälkeen topografinen pari vähennetään toisesta parista, jolloin vain muutossignaali jää jäljelle. [6] 4.4 Rajoitukset ' + ρ) Bll ' 4π ϕ' ϕ = ρ B λ ll Muutoksen suuruus (12) (13) (14) Kuvien oton välillä tapahtunut muutos ei saa olla liian suuri, koska silloin koherenssi katoaa. Jos sirottajien (radar scatterers) keskinäinen asema pikselin sisällä muuttuu enemmän kuin mikä on tutkan aallonpituus, koherenssi katoaa (temporaalinen dekorrelaatio). Tällöin muutoksen suuruuden voidaan vain sanoa ylittäneen jonkin minimiarvon. Muutoksen tulisi olla koherentti muutos, joka on yhteinen usealle vierekkäiselle pikselille. Tällöin tietyn pikselin sirottajien keskinäinen asema ei ole 9
![(11) Yhdistämällä yhtälöt (5) ja (10) saadaan vaiheeksi [URL1] 4π ϕ = B ll λ Toisella interferogrammilla kantavektorin pituus B' ja sen asento α' ovat erisuuruiset kuin ensimmäisellä](/docs-images/44/80370/images/page_10.jpg "interferogrammilla, joten myös B ll ' on erisuuruinen.")
11 muuttunut merkittävästi, mutta joukko sirottajia on liikkunut ylös, alas tai sivusuunnassa korreloivalla tavalla. [URL1] Muutoksen mittakaava Jotta muutos voitaisiin havaita luotettavasti, muutoksen mittakaavan tulisi olla pienempi kuin interferogrammin koko. Naapuripikselien välillä tapahtuvien pienten diskreettien muutosten suuruus on helpompi määrittää, kuin tasaisten paikallisten muutosten suuruus, koska ne muistuttavat ilmakehän häiriöitä ja virheellisten ratatietojen aiheuttamaa muutosta. [URL1] Deformaatiosignaalin voimakkuus Lisäksi deformaatiosignaalin voimakkuuden tulee olla vähintään kaksi kertaa kohinasignaalin voimakkuus. Jos muutosta havaitaan naapuripikselien välillä, signaalin ei tarvitse olla niin voimakas kuin suuremman alueen muutosta mitattaessa. Pienellä alueella ilmakehän virheet voidaan unohtaa ja kohinaa aiheutuu vain dekorrelaatioista. Suurella alueella myös ilmakehä pitää ottaa huomioon. Ilmakehän vaikutusta voidaan vähentää käyttämällä useampia kuvia. [6] Siirtymävektorin komponentit GPS:llä pystytään määrittämään kolmiulotteinen siirtymävektori (surface displacement vector), mutta tutka pystyy mittaamaan signaalin kulkumatkan muutoksia vain katseluvektorin suunnassa (slant-range). Siirtymävektori kohteessa on kuitenkin kolmiulotteinen ja koostuu pohjois-, itä- ja pystykomponenteista, jotka projisoituvat tutkan katseluvektorille. SAR-interferometrian etuna GPS:n nähden on kuitenkin sen täydellinen alueellinen kattavuus harvojen havaintojen sijaan. [URL1] Yhdistämällä kuvia nousevilta ja laskevilta ylilennoilta, voidaan kaksi kolmesta siirtymävektorin komponentista ratkaista. Jos myös kolmas komponentti halutaan ratkaista, täytyy liikkeen suunnasta tehdä oletuksia. [7,8] Esimerkiksi jäätikön liike voidaan olettaa yhdensuuntaiseksi pinnan eli korkeusmallin gradientin kanssa. Myös maahavaintoja voidaan käyttää apuna. Useissa sovelluksissa yksi (pystysuora komponentti) tai kaksi komponenttia on riittävä tulos. [6] 10

12 5. Gradientti-interferometria (GINSAR) Differentiaali-interferometrialla voidaan havaita pienetkin liikkeet kohteessa kuvien huonosta resoluutiosta huolimatta. Tämä on kuitenkin mahdollista vain, jos topografian ja liikkeen vaikutukset interferogrammiin voidaan täysin erottaa toisistaan. Koska esimerkiksi jäätiköt ovat jatkuvasti liikkeessä, voi olla mahdotonta löytää paria, jossa olisi vain topografiasta aiheutuneita interferenssikäyriä (fringe). Jos pystytään löytämään pari, jonka kantavektorin pituus on suurin piirtein nolla, sisältää interferogrammi vain liikkeestä aiheutuneita vaihekuvioita ja koko DINSARmenetelmää ei tarvita. Tällaisen parin löytäminen on kuitenkin erittäin harvinaista, koska koherenssin tulee myös olla riittävä. [9] Interferometrisen signaalin käsittelyn vaikein osa on vaiheen purku. Sen lisäksi, että käytetyt algoritmit ovat erittäin monimutkaisia ja laskennallisesti raskaita, prosessi on erittäin virhealtis ja usein paikallisesti mahdoton etenkin vuoristojäätiköillä, suurien korkeusvaihteluiden (layover ja varjot) ja huomattavan kohinan takia. Lisäksi perinteisessä DINSAR-tekniikassa vaiheen purku täytyy suorittaa kahdesti, mikä johtaa virheiden kasautumiseen. Tämän takia lopputuotteiden laadusta ei usein voida mennä takuuseen. [10] Perinteiselle differentiaali-inteferometrialle onkin alettu etsiä vaihtoehtoja. Gradienttiinterferometria (GINSAR) on tarkka gradientti-menetelmä, joka on kehitetty jäätiköiden pinnan mallintamiseen ja nopeuden mittaamiseen. Menetelmä perustuu interferometrisen vaiheen gradienttien laskemiseen, kaltevuuskarttojen tuottamiseen ilman interferometrisen vaiheen purkua ja kaltevuuskarttojen vähentämiseen toisistaan.[10] 5.1 GINSAR:n perusidea ja topogrammin muodostaminen GINSAR-tekniikassa hyödynnetään tietoa siitä, että suurimmalle osalle pisteitä interferogrammissa purkamattoman vaiheen (wrapped phase) osittaisderivaatat ovat yhtä suuret kuin puretun vaiheen (unwarpped phase) osittaisderivaatat eli { ϕ( } W x W y { ϕ( } ϕ( ϕ( =, jos [ π, + π ) x x ϕ( ϕ( =, jos [ π, + π ) y y missä W on wrapping-operaattori. [10] (15) Interferometrisen vaiheen osittaisderivaattoja atsimuutti- ja etäisyyssuunnissa voidaan approksimoida seuraavasti [10]: { ϕ( } x { ϕ( } y ϕ( x + ϕ( ϕ x ( = ; x ϕ( y + ϕ( ϕ y ( =, y missä siirtymät x ja y yleensä vastaavat yhtä pikseliä. Käytännössä interferometrisen vaiheen osittaisderivaatta voidaan laskea vähentämällä alkuperäinen interferogrammi saman (16) 11

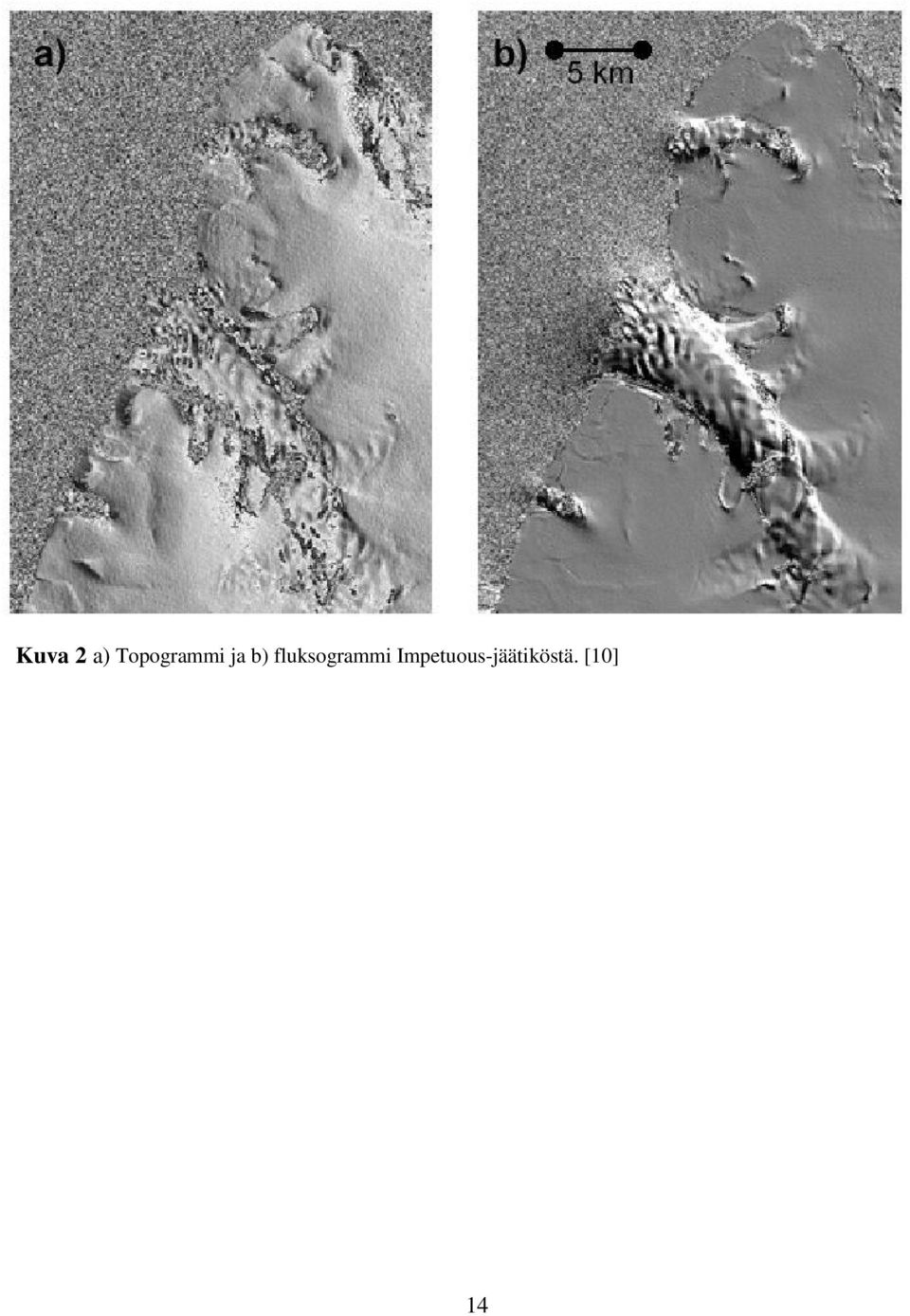
13 interferogrammin siirretystä versiosta. Tuloksena saatavaa gradienttikuvaa kutsutaan topogrammiksi (topogram) (Kuva 2a). [10] Topogrammi esitetään RGB-kuvana. Kaksi ensimmäistä tasoa esittävät osittaisgradientteja ϕ x ja ϕ y. Kolmas taso esittää h(:n nousun pituusyksikköä kohden ja se määritellään h(= h x x+ h y y (ks. luku 5.2). [10] 5.2 Kaltevuuskartan luominen Topogrammi voidaan muuttaa suoraan kohteen kaltevuuskartaksi (slope map) ilman vaiheenpurkua. Maanpinnan kaltevuusarvo (terrestrial slope value) ε lasketaan pikseleittäin seuraavasti: missä p on pikselin halkaisija maastossa [10]. Korkeuden muutokset (height increments) cosε = p, (17) h + h + p määritellään seuraavasti h y C( = 0.25π x C( ϕ C( on muuntokerroin, joka riippuu kuvausgeometriasta. [10] RGB-kuvana esitettäessä kaltevuuskartan kaksi ensimmäistä tasoa sisältävät kaltevuusarvot atsimuutti- ja etäisyyssuunnassa ja ne saadaan seuraavasti: ε x = tan -1 ( h x / p x ) ja ε y = tan -1 ( h y / p y ). Kolmas kerros sisältää kaltevuusarvon ε. [10] 5.3 Nopeuskartan luominen 1 y y, λ B 1 ( x) ρ( sinθ ( Olennainen GINSAR-tekniikan tuoma etu on se, että topogrammi voidaan skaalata millä tahansa reaaliluvulla (ei välttämättä kokonaisluvulla), ja mikä tahansa lineaarikombinaatio kahden eri interferogrammeista saadun topogrammin välillä on mahdollinen. Topografinen vaihe voidaankin kompensoida helposti vähentämällä keskenään kaksi skaalattua ja yhteensovitettua topogrammia. Merkitään kohteessa tapahtunutta liikettä V T, missä V on liikevektorin (flow vector) projektio katselusuunnalle ja T on temporaalinen kanta (temporal baseline). Kun oletetaan, että ϕ= ϕ topo + ϕ liike ja C 1 ϕ topo1 =C 2 ϕ topo2, kahden topogrammin kolmansien tasojen erotus voidaan esittää [10] (18) (19) F = C ϕ C ϕ 1 liike1 2 liike2 Tuloksena saatavaa kuvaa F(, joka sisältää vain differentiaalisen liikkeen vaiheen ilman topografista vaihetta, kutsutaan fluksogrammiksi (fluxogram) (Kuva 2b). Fluksogrammi esitetään 4- kerros kuvana. Kaksi ensimmäistä tasoa sisältävät erotukset atsimuutti- ja etäisyyssuunnissa. Kolmannella tasolla on kokonaiserotus ja neljännellä tasolla differentiaalisen liikkeen suunta. [10] Fluksogrammi sisältää vain suhteellista tietoa kohteen liikkeestä. Jotta yhtälö 20 voidaan ratkaista muuttujiensa suhteen, oletetaan että nopeusgradienttien suhde a = ϕ liike1 / ϕ liike2 säilyy vakiona jäätikön alueella. Lisäksi on määritettävä joitakin referenssiarvoja ϕ liike2 :lle. Tähän voidaan käyttää esimerkiksi tranferential approach-menetelmää [10]. Lopuksi fluksogrammin kolmas taso muutetaan uudeksi kuvatuotteeksi seuraavasti (20) 12
 ε lasketaan pikseleittäin seuraavasti: missä p on pikselin halkaisija maastossa [10].")
14 ϕ liike 1 missä V 1 on ensimmäisen interferogrammin nopeusgradientti. [10] Absoluuttisen nopeus saadaan laskemalla viivaintegraali sen osittaisgradienteista V x ja V y jota edeltää tai seuraa lineaarinen ylipäästösuodatus ja atsimuutti- ja etäisyyssuunnassa saatujen tulosten keskiarvoistaminen. [10] 5.4 Rajoitukset Yhtälö 15 ei voimassa, jos vaihe-ero kahden vierekkäisen pikselin välillä etäisyys- tai atsimuuttisuunnassa on suurempi kuin π. Interferogrammissa tällaisia kohtia kutsutaan singulariteeteiksi, ja ne aiheutuvat kohinasta, nopeista korkeusvaihteluista ja/tai nopeasti kiihtyneestä liikkeestä. Jos maanpinnan kaltevuus ylittää kriittisen arvon ε kr, osittaisvaihegradientti (partial phase gradient) ylittää arvon π. Kriittinen arvo riippuu lähinnä kantavektorin katselusuuntaa vastaan kohtisuoran komponentin pituudesta ja katselukulmasta. Alueilla, joilla muutosnopeus on suuri, liikkeen osittaisgradientti ylittää arvon π, jos nopeuden gradientti kahden naapuripikselin välillä on suurempi kuin 0.25λ. Topogrammissa saattaa olla interferenssikäyrien reunasta lähteviä kapeita jälkiä (traces). Nämä jäljet voidaan kompensoida paikallisesti lisäämällä tai vähentämällä 2π:n arvo topogrammiin. [10] 5.5 Edut = V V ( = V (1, + V ( = V ( 1) + 1 T = F ( C ac 1 1 x 1 i= 1 x 1 j= 1 V V x y ), 1 2 ( i,, ( j) Interferogrammeista muodostettuja topogrammeja (kaltevuuskarttoja) voidaan verrata toisista interferogrammeista saatuihin topogrammeihin riippumatta niiden atsimuutti- ja etäisyyssuunnista. Gradientti-interferometriassa vältytään alueelliselta virheen kasautumiselta ja tuloksena saatavat nopeusgradientit sietävät melko hyvin paikallisia virheitä vaiheessa, joten menetelmä toimii merkittävästä vaihekohinasta huolimatta. Algoritmi on yksinkertaisempi ja laskennallisesti kevyempi. Alkuperäinen resoluutio ja yksityiskohtaisuus säilyvät jopa 75 prosenttisesti. [10] (21) (22) 13
![tulosten keskiarvoistaminen. [10] 5.4 Rajoitukset Yhtälö 15 ei voimassa, jos vaihe-ero kahden vierekkäisen pikselin välillä etäisyys- tai atsimuuttisuunnassa on suurempi kuin π.](/docs-images/44/80370/images/page_14.jpg "Interferogrammissa tällaisia kohtia kutsutaan singulariteeteiksi, ja ne aiheutuvat kohinasta, nopeista korkeusvaihteluista ja/tai nopeasti kiihtyneestä liikkeestä.")

15 Kuva 2 a) Topogrammi ja b) fluksogrammi Impetuous-jäätiköstä. [10] 14
16 6. DINSAR-kokeilu Svartisen-jäätiköllä 6.1 Testiaineisto Jäätikkö-alueilla suurimmat temporaalisen dekorrelaation aiheuttajat ovat sulaminen, ja jos alueella on kuivaa lunta, kova tuuli. [11] Svartisen-jäätikön alueelta käytössä olleista kuvista vain muutamalla parilla oli hyvä koherenssi. Osalla kuvista, erityisesti kesällä otetuilla kuvilla, takaisinsironta oli jäätiköiden alueella heikkoa ja siksi koherenssi pareilla oli liian alhainen interferogrammin muodostamiseen. Tästä johtuen samalta radalta (track) otettuja hyvätasoisia kuvapareja oli vain yksi nelikko. Myöskään kolmen kuvan differentiaali-interfeometriaan toimivia kuvia ei löytynyt, koska temporaalinen dekorrelaatio on jäätiköllä erittäin voimakasta. Ensimmäisen differentiaali-interferogrammin muodostamisessa topografinen vaihe saatiin muiden kuvien kanssa eri radalta otetulta tandemparista. Toisella saman radan tandemparilla kuvien koherenssi ei ollut riittävä. Käytetyt kuvat olivat kaksi ERS-1/2 -tandem paria (track 380) ja (track 108). Muodostettiin myös toinen differentiaali-interferogrammi kahdelta samalta radalta olevalta tandemparilta. Näissä molemmissa koherenssi oli riittävä tandem-interferogrammien muodostamiseen. Yleensä differentiaali-interferometriassa käytetyistä kuvapareista toinen sisältää vain topografian ja toinen sekä topografian että muutoksen. Tällöin vain ensimmäinen pari on tandempari ja toisen parin kuvien välillä aikaa on yleensä kulunut viikkoja, kuukausia tai jopa vuosia. Tässä tapauksessa molemmat kuvaparit sisältävät vain topografian. Jos topografiassa on näiden kahden viikon aikana tapahtunut pieniä, muutaman senttimetrin suuruisia muutoksia (jäätikkö sulanut tai paksuuntunut), niitä ei voida havaita differentiaali-interferogrammista. Interferogrammi on herkempi liikkeelle kuin topografialle. Yksi vaihesykli vastaa 180 metrin korkeuden muutosta, eli hyvin pieni korkeuden muutos näkyy hyvin pienenä vaiheen muutoksena, jota ei voida erottaa kohinasta ja muista virhelähteistä. Pieni liike interferogrammin sisällä näkyy suurempana vaiheen muutoksena, koska yksi vaihesykli vastaa 2,8 mm:n liikettä katselusuunnassa. Koska jäätiköt ovat usein jatkuvassa liikkeessä, jäätikköalueella on saattanut tapahtua muutoksia jommankumman tai molempien tandemparien kuvien oton välillä, jolloin niissä on molemmissa sekä topografian että liikkeen aiheuttamia vaihekuvioita. Tällöin differentiaali-interferogrammi muodostuu näiden liikkeiden kombinaatiosta. Jos kohde on merkittävässä jatkuvassa liikkeessä, tandempareja ei pitäisi käyttää topografisena referenssinä, vaan tulisi käyttää muulla tavoin luotua korkeusmallia. 15
 otettuja hyvätasoisia kuvapareja oli vain yksi nelikko.")
17 Taulukko 1. Differentiaali-interferogrammien muodostamiseen käytetyt kuvat Pvm Frame Track Pvm Frame Track Kanta B ERS ERS ,26 ERS ERS ,51 ERS ERS ERS ERS Prosessointi Interferogrammien muodostamiseen käytettiin Atlantis Scientific Inc.:n EVInSAR ohjelmaa. Ensin otetusta parista muodostettiin korkeusmalli. Ohjelman valmiita oletusasetuksia ERS1/2 -tandemkuville käytettiin hyvin pitkälle. Master- ja slave- kuviksi valittiin 16.- ja otetut kuvat, ja määriteltiin master-kuvalta prosessoitava alue (Kuva 3). Ohjelma suoritti kuvien yhteensovituksen automaattisesti määrittämällä bikuutiopolynomien kertoimet slave-kuvan uudelleennnäytteistystä varten. Yhteensovituksessa käytettiin 63:a pistettä ja jäännösvirhe oli pikseliä. Tarkasti yhteensovitetuista kuvista muodostettiin interferogrammi, josta poistettiin tasaisen maan vaihe, ja jota ehostettiin poistamalla kohinaa selkeämpien vaihekuvioiden saamiseksi (Kuva 4). Tämän jälkeen interferogrammin vaihe purettiin käyttämällä ohjelman omaa Iterative disk masking -vaiheenpurkualgoritmia. Alueet, joilla koherenssi (Kuva 5) oli heikko, jätettiin pois. Lopuksi vaihe muutettiin kohteen korkeudeksi ja korkeusmalli muunnettiin karttaprojektioon käyttämällä hyväksi kuvan ratatietoja (Kuva 6). Muutoksen havaitsemista varten muodostettiin differentiaali-interferogrammi ohjelman differentiaalimoodilla. Master- ja slave-kuviksi valittiin ja otetut kuvat ja masterkuvalta määriteltiin prosessoitava alue (Kuva 7). Lisäksi määriteltiin aikaisemmin muodostettu korkeusmalli. Master- ja slave-kuvien yhteensovituksen lisäksi oli suoritettava korkeusmallin yhteensovitus master-kuvalle. Korkeusmallin yhteensovituksessa ohjelma käytti hyväksi olemassa olevaa master-kuvaa ( ), jolta korkeusmalli on tehty. Tämän jälkeen interferogrammi muodostettiin, ja siitä poistettiin tasaisen maan vaihe ja topografinen vaihe (Kuva 8). Kun interferogrammin vaihe oli purettu, se muutettiin tutkan katselusuunnassa tapahtuneeksi muutokseksi ja muunnettiin karttakoordinaatistoon (Kuva 9). [12] Kuvassa 10 on ja kuvista samalla tavoin muodostettu differentiaaliinterferogrammi. Topografinen vaihe saatiin otetulta parilta ja masterkuvana oli otettu kuva. Nämä kuvat olivat kaikki samalta radalta, mutta edellisten kuvien tavoin tandempareja. 6.3 Tulosten arviointi Deformaatiokuvio on hyvin samantapainen molemmilla kuvanelikoilla tuotetuilla differentiaaliinterferogrammeilla. Suurin liike on odotetusti jäätikön reunoilla, jotka sijaitsevat jyrkillä rinteillä. Topografista vaihetta ei ole saatu täysin poistettua ja jäätikön ulkopuolisilla alueilla on havaittavissa heikkoja vaihekuvioita. Kaikista selkeimmät kuviot ovat kuitenkin jäätikön alueella ja sen reunoilla. 16

18 On erittäin todennäköistä että ne aiheutuvat jäätikön liikkeestä jommankumman tai molempien interferogrammien kuvien oton välisenä aikana. Jos kohteessa on tapahtunut liikettä topografisen parin kuvien oton välillä, saadaan tuloksena kombinaatio kummankin tandem-parin sisäisestä muutoksesta. Differentiaali-interferogrammin käyrät voivat myös johtua korkeusmallin epätarkkuudesta tai trendistä: Korkeusmallin luominen on hankalaa suurten korkeusvaihteluiden vuoksi, erityisesti vaiheen purkamisessa voi olla tapahtunut virheitä. epätarkoista rataparametreista: tarkkoja rataparametreja ei ole saatavilla vuoden 1997 ERS1-kuville huonosta yhteensovituksesta: käytettäessä eri radoilta otetuttuja kuvia yhteensovituksessa voi olla ongelmia ilmakehän aiheuttamasta signaalin viivästymisestä vaihekohina ja alhainen koherenssi aiheuttavat myös ylimääräisiä käyriä Täytyy myös huomioida että interferometrialla saadaan vain suhteellinen liike. Havaittu liike on suhteessa oletetusti paikallaan olevaan pisteeseen. Tässä tapauksessa se on yksi kulmapiste (0,0). Koska referenssinä ei ole käytetty varmasti paikallaan olevaa pistettä, referenssipisteen mahdollinen liike aiheuttaa virheen havaitun liikkeen suuruuteen. 6.4 Johtopäätökset Koska maastomittaustuloksia ei ole saatavilla interferogrammin ajalta, ei saatujen tulosten oikeellisuutta voida arvioida. Jos sellaisia olisi käytössä, voitaisiin verrata tuloksia liikkeen sijainnista ja sen suuruudesta. Käytössä olleilla kuvilla on perinteistä differentiaali-interferometriaa käyttäen vaikea saada luotettavampia tai tarkempia tuloksia jäätikön liikkeestä. Riittävän tarkkaa olemassa olevaa korkeusmallia alueelta olisi voinut käyttää topografisen vaiheen laskentaan ja poistoon. Tällöin topografinen vaihe ei varmasti sisältäisi liikettä. Kuvat on ilmeisesti hankittu gradientti-interferometria tekniikan kehittämiseen, ja sitä käyttämällä voitaisiin kuvia hyödyntää paremmin. Gradientti-interferometriassa liikkeen havaitsemiseen voidaan käyttää kahta tandemparia, koska laskennalla ratkaistaan molemmille pareille niissä esiintyvän liikkeen suuruus. Interferogrammeista muodostettuja topogrammeja (kaltevuuskarttoja) voidaan verrata toisista interferogrammeista saatuihin topogrammeihin riippumatta niiden atsimuutti- ja etäisyyssuunnista. Lisäksi topogrammi voidaan kertoa millä tahansa reaaliluvulla, mikä sallii minkä tahansa lineaarikombinaation eri interferogrammeista muodostettujen topogrammien välillä. Vierekkäisiltä radoilta otettuja tandempareja voidaan hyvin käyttää liikkeen mittaamiseen. 17


19 Kuva 3 Kartta Svartisen-jäätikön alueelta. Jäätiköt on merkitty harmaalla. [URL4] 18


20 Kuva 4 Svartisen intensiteettikuva: kuvalta korkeusmallin tekoon valittu alue. Mitä vaaleampi pikseli on sitä voimakkaampi takaisinsironta. Jäätikön alueelta takaisinsironta on ympäröiviä rinteitä voimakkaampaa. Kuva on kuvauskoordinaatistossa. Vasemmalla ylhäällä on Storglomvatnet-järvi. 19


21 Kuva 5 Interferogrammi Yksi vaihesykli vastaa noin 120 metrin korkeuden muutosta. 20

22 Kuva 6 Koherenssikuva Mitä vaaleampi pikseli sitä parempi koherenssi. Oikealla erottuu tummana Holandsfjorden-vuono. 21

23 Kuva 7 Korkeusmalli oikaistuna karttaprojektioon (UTM, WGS84). Mustilla alueilla koherenssi on ollut liian heikko, ja ne on jätetty pois korkeusmallista. Mitä vaaleampi pikseli sitä korkeampi. 22

24 Kuva 8. Differentiaali-interferometriaan valittu alue kuvalta. 23


25 Kuva 9 Differentiaali-interferogrammi oikaistuna karttaprojektioon. Yksi sykli vastaa n. 2,8 cm muutosta. Vasemmalla kuvalla on pelkkä vaihe ja oikealla kuvalla on sekä amplitudi että vaihe. 24

26 Kuva 10 Suhteellinen muutos tutkan katselusuunnassa. Asteikko on 0-31,5 cm, jäätikön keskellä suhteellinen muutos on cm. Liikkeen referenssi eli muutos on oletettu nollaksi tummimmalla alueella 25

27 Kuva ja kuvista muodostettu differentiaali-interferogrammi. Kuva on eri kuvauskoordinaatissa edellisten kuvien kanssa ja peilikuva omasta kuvauskoordinaatistostaan. Kuvaa ei ole oikaistu eikä heikon koherenssin alueita ole poistettu. 26
Maankäytön luokittelu SAR-interferometrialla
 Maa-57.270 Fotogrammetrian, kuvatulkinnan ja kaukokartoituksen seminaari Kirsi Karila 25.4.2003 Maankäytön luokittelu SAR-interferometrialla Johdanto SAR-interferometria (INSAR) on tärkeä tekniikka tuotettaessa
Maa-57.270 Fotogrammetrian, kuvatulkinnan ja kaukokartoituksen seminaari Kirsi Karila 25.4.2003 Maankäytön luokittelu SAR-interferometrialla Johdanto SAR-interferometria (INSAR) on tärkeä tekniikka tuotettaessa
SAR-INTERFEROMETRIA MAANPINNAN MUODONMUUTOSTEN HAVAITSEMISESSA. Maa-57.270 Fotogrammetrian, kuvatulkinnan ja kaukokartoituksen seminaari
 SAR-INTERFEROMETRIA MAANPINNAN MUODONMUUTOSTEN HAVAITSEMISESSA Maa-57.270 Fotogrammetrian, kuvatulkinnan ja kaukokartoituksen seminaari Valtteri Tuominen 57534C valtteri.tuominen@hut.fi Tiivistelmä Niin
SAR-INTERFEROMETRIA MAANPINNAN MUODONMUUTOSTEN HAVAITSEMISESSA Maa-57.270 Fotogrammetrian, kuvatulkinnan ja kaukokartoituksen seminaari Valtteri Tuominen 57534C valtteri.tuominen@hut.fi Tiivistelmä Niin
A B = (1, q, q 2 ) (2, 0, 2) = 2 2q q 2 = 0 q 2 = 1 q = ±1 A(±1) = (1, ±1, 1) A(1) A( 1) = (1, 1, 1) (1, 1, 1) = A( 1) A(1) A( 1) = 1
 (2, 0, 2) = 2 2q q 2 = 0 q 2 = 1 q = ±1 A(±1) = (1, ±1, 1) A(1) A( 1) = (1, 1, 1) (1, 1, 1) = A( 1) A(1) A( 1) = 1") Mapu I Viikko 4 tehtävä malli Millä q:n arvoilla vektori A(q) (, q, q ) on kohtisuora vektorin B (, 0, ) kanssa? Ovatko A:n eri ratkaisut keskenään kohtisuoria? Jos eivät, määrää niiden välinen kulma!
Mapu I Viikko 4 tehtävä malli Millä q:n arvoilla vektori A(q) (, q, q ) on kohtisuora vektorin B (, 0, ) kanssa? Ovatko A:n eri ratkaisut keskenään kohtisuoria? Jos eivät, määrää niiden välinen kulma!
Luento 6: 3-D koordinaatit
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Lentokäyttöinen SAR Interferometria ja sen soveltaminen korkeusmallin tiedonkeruuseen. Maa Fotogrammetrian seminaari.
 Lentokäyttöinen SAR Interferometria ja sen soveltaminen korkeusmallin tiedonkeruuseen Maa-57.270 Fotogrammetrian seminaari Antero Kukko 11.4.2001 Sisällys 1. Johdanto...3 2. SAR-tutkan toimintaperiaate...3
Lentokäyttöinen SAR Interferometria ja sen soveltaminen korkeusmallin tiedonkeruuseen Maa-57.270 Fotogrammetrian seminaari Antero Kukko 11.4.2001 Sisällys 1. Johdanto...3 2. SAR-tutkan toimintaperiaate...3
Tampereen yliopisto Tietokonegrafiikka 2013 Tietojenkäsittelytiede Harjoitus
 Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA. Lauri Karppi j82095. SATE.2010 Dynaaminen kenttäteoria DIPOLIRYHMÄANTENNI.
 VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Oskari Uitto i78966 Lauri Karppi j82095 SATE.2010 Dynaaminen kenttäteoria DIPOLIRYHMÄANTENNI Sivumäärä: 14 Jätetty tarkastettavaksi: 25.02.2008 Työn
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Oskari Uitto i78966 Lauri Karppi j82095 SATE.2010 Dynaaminen kenttäteoria DIPOLIRYHMÄANTENNI Sivumäärä: 14 Jätetty tarkastettavaksi: 25.02.2008 Työn
Luento 5: Stereoskooppinen mittaaminen
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Tekijä Pitkä matematiikka
 K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
S-108-2110 OPTIIKKA 1/10 Laboratoriotyö: Polarisaatio POLARISAATIO. Laboratoriotyö
 S-108-2110 OPTIIKKA 1/10 POLARISAATIO Laboratoriotyö S-108-2110 OPTIIKKA 2/10 SISÄLLYSLUETTELO 1 Polarisaatio...3 2 Työn suoritus...6 2.1 Työvälineet...6 2.2 Mittaukset...6 2.2.1 Malus:in laki...6 2.2.2
S-108-2110 OPTIIKKA 1/10 POLARISAATIO Laboratoriotyö S-108-2110 OPTIIKKA 2/10 SISÄLLYSLUETTELO 1 Polarisaatio...3 2 Työn suoritus...6 2.1 Työvälineet...6 2.2 Mittaukset...6 2.2.1 Malus:in laki...6 2.2.2
Vanhankaupunginkosken ultraäänikuvaukset Simsonar Oy Pertti Paakkolanvaara
 Vanhankaupunginkosken ultraäänikuvaukset 15.7. 14.11.2014 Simsonar Oy Pertti Paakkolanvaara Avaintulokset 2500 2000 Ylös vaellus pituusluokittain: 1500 1000 500 0 35-45 cm 45-60 cm 60-70 cm >70 cm 120
Vanhankaupunginkosken ultraäänikuvaukset 15.7. 14.11.2014 Simsonar Oy Pertti Paakkolanvaara Avaintulokset 2500 2000 Ylös vaellus pituusluokittain: 1500 1000 500 0 35-45 cm 45-60 cm 60-70 cm >70 cm 120
PRELIMINÄÄRIKOE. Lyhyt Matematiikka 3.2.2015
 PRELIMINÄÄRIKOE Lyhyt Matematiikka..015 Vastaa enintään kymmeneen tehtävään. Kaikki tehtävät arvostellaan asteikolla 0-6 pistettä. 1. a) Sievennä x( x ) ( x x). b) Ratkaise yhtälö 5( x 4) 5 ( x 4). 1 c)
PRELIMINÄÄRIKOE Lyhyt Matematiikka..015 Vastaa enintään kymmeneen tehtävään. Kaikki tehtävät arvostellaan asteikolla 0-6 pistettä. 1. a) Sievennä x( x ) ( x x). b) Ratkaise yhtälö 5( x 4) 5 ( x 4). 1 c)
9. Vektorit. 9.1 Skalaarit ja vektorit. 9.2 Vektorit tasossa
 9. Vektorit 9.1 Skalaarit ja vektorit Skalaari on koon tai määrän mitta. Tyypillinen esimerkki skalaarista on massa. Lukumäärä on toinen hyvä esimerkki skalaarista. Vektorilla on taas suuruus ja suunta.
9. Vektorit 9.1 Skalaarit ja vektorit Skalaari on koon tai määrän mitta. Tyypillinen esimerkki skalaarista on massa. Lukumäärä on toinen hyvä esimerkki skalaarista. Vektorilla on taas suuruus ja suunta.
SISÄLTÖ Venymän käsite Liukuman käsite Venymä ja liukuma lujuusopin sovelluksissa
 SISÄLTÖ Venymän käsite Liukuman käsite Venymä ja liukuma lujuusopin sovelluksissa 1 SISÄLTÖ 1. Siirtymä 2 1 2.1 MUODONMUUTOS Muodonmuutos (deformaatio) Tapahtuu, kun kappaleeseen vaikuttaa voima/voimia
SISÄLTÖ Venymän käsite Liukuman käsite Venymä ja liukuma lujuusopin sovelluksissa 1 SISÄLTÖ 1. Siirtymä 2 1 2.1 MUODONMUUTOS Muodonmuutos (deformaatio) Tapahtuu, kun kappaleeseen vaikuttaa voima/voimia
Vektorien pistetulo on aina reaaliluku. Esimerkiksi vektorien v = (3, 2, 0) ja w = (1, 2, 3) pistetulo on
 ja w = (1, 2, 3) pistetulo on") 13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
Teoreettisia perusteita II
 Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Mb8 Koe Kuopion Lyseon lukio (KK) sivu 1/2
 sivu 1/2") Mb8 Koe 0.11.015 Kuopion Lyseon lukio (KK) sivu 1/ Kokeessa on kaksi osaa. Osa A ratkaistaan tehtäväpaperille ja osa B ratkaistaan konseptipaperille. Osa A: saat käyttää taulukkokirjaa mutta et laskinta.
Mb8 Koe 0.11.015 Kuopion Lyseon lukio (KK) sivu 1/ Kokeessa on kaksi osaa. Osa A ratkaistaan tehtäväpaperille ja osa B ratkaistaan konseptipaperille. Osa A: saat käyttää taulukkokirjaa mutta et laskinta.
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 2017 Insinöörivalinnan matematiikan koe , Ratkaisut (Sarja A)
") Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 017 Insinöörivalinnan matematiikan koe 30..017, Ratkaisut (Sarja A) 1. a) Lukujen 9, 0, 3 ja x keskiarvo on. Määritä x. (1 p.) b) Mitkä reaaliluvut
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 017 Insinöörivalinnan matematiikan koe 30..017, Ratkaisut (Sarja A) 1. a) Lukujen 9, 0, 3 ja x keskiarvo on. Määritä x. (1 p.) b) Mitkä reaaliluvut
Korkean resoluution ja suuren kuva-alueen SAR
 Korkean resoluution ja suuren kuva-alueen SAR MATINE tutkimusseminaari 17.11.2016 Risto Vehmas, Juha Jylhä, Minna Väilä, Ari Visa Tampereen teknillinen yliopisto Signaalinkäsittelyn laitos Hankkeelle myönnetty
Korkean resoluution ja suuren kuva-alueen SAR MATINE tutkimusseminaari 17.11.2016 Risto Vehmas, Juha Jylhä, Minna Väilä, Ari Visa Tampereen teknillinen yliopisto Signaalinkäsittelyn laitos Hankkeelle myönnetty
LIITE 1 VIRHEEN ARVIOINNISTA
 1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
Työn tavoitteita. 1 Teoriaa
 FYSP103 / K3 BRAGGIN DIFFRAKTIO Työn tavoitteita havainnollistaa röntgendiffraktion periaatetta konkreettisen laitteiston avulla ja kerrata luennoilla läpikäytyä teoriatietoa Röntgendiffraktio on tärkeä
FYSP103 / K3 BRAGGIN DIFFRAKTIO Työn tavoitteita havainnollistaa röntgendiffraktion periaatetta konkreettisen laitteiston avulla ja kerrata luennoilla läpikäytyä teoriatietoa Röntgendiffraktio on tärkeä
VEKTORIT paikkavektori OA
 paikkavektori OA Piste A = (2, -1) Paikkavektori OA = 2i j 3D: kuvan piirtäminen hankalaa Piste A = (2, -3, 4) Paikkavektori OA = 2i 3j + 4k Piste A = (a 1, a 2, a 3 ) Paikkavektori OA = a 1 i + a 2 j
paikkavektori OA Piste A = (2, -1) Paikkavektori OA = 2i j 3D: kuvan piirtäminen hankalaa Piste A = (2, -3, 4) Paikkavektori OA = 2i 3j + 4k Piste A = (a 1, a 2, a 3 ) Paikkavektori OA = a 1 i + a 2 j
BM20A5840 Usean muuttujan funktiot ja sarjat Harjoitus 7, Kevät 2018
 BM20A5840 Usean muuttujan funktiot ja sarjat Harjoitus 7, Kevät 2018 Tehtävä 8 on tällä kertaa pakollinen. Aloittakaapa siitä. 1. Kun tässä tehtävässä sanotaan sopii mahdollisimman hyvin, sillä tarkoitetaan
BM20A5840 Usean muuttujan funktiot ja sarjat Harjoitus 7, Kevät 2018 Tehtävä 8 on tällä kertaa pakollinen. Aloittakaapa siitä. 1. Kun tässä tehtävässä sanotaan sopii mahdollisimman hyvin, sillä tarkoitetaan
3.3 Paraabeli toisen asteen polynomifunktion kuvaajana. Toisen asteen epäyhtälö
 3.3 Paraabeli toisen asteen polynomifunktion kuvaajana. Toisen asteen epäyhtälö Yhtälön (tai funktion) y = a + b + c, missä a 0, kuvaaja ei ole suora, mutta ei ole yhtälökään ensimmäistä astetta. Funktioiden
3.3 Paraabeli toisen asteen polynomifunktion kuvaajana. Toisen asteen epäyhtälö Yhtälön (tai funktion) y = a + b + c, missä a 0, kuvaaja ei ole suora, mutta ei ole yhtälökään ensimmäistä astetta. Funktioiden
Liikkuvan maalin ilmaisu ja tunnistaminen SAR-tutkalla
 Liikkuvan maalin ilmaisu ja tunnistaminen SAR-tutkalla MATINE:n tutkimusseminaari 16.11.2017 Risto Vehmas, Juha Jylhä, Marja Ruotsalainen, Minna Väilä, Henna Perälä Tampereen teknillinen yliopisto Signaalinkäsittelyn
Liikkuvan maalin ilmaisu ja tunnistaminen SAR-tutkalla MATINE:n tutkimusseminaari 16.11.2017 Risto Vehmas, Juha Jylhä, Marja Ruotsalainen, Minna Väilä, Henna Perälä Tampereen teknillinen yliopisto Signaalinkäsittelyn
Ei välttämättä, se voi olla esimerkiksi Reuleaux n kolmio:
 Inversio-ongelmista Craig, Brown: Inverse problems in astronomy, Adam Hilger 1986. Havaitaan oppositiossa olevaa asteroidia. Pyörimisestä huolimatta sen kirkkaus ei muutu. Projisoitu pinta-ala pysyy ilmeisesti
Inversio-ongelmista Craig, Brown: Inverse problems in astronomy, Adam Hilger 1986. Havaitaan oppositiossa olevaa asteroidia. Pyörimisestä huolimatta sen kirkkaus ei muutu. Projisoitu pinta-ala pysyy ilmeisesti
LIITE 1 VIRHEEN ARVIOINNISTA
 1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
Luento 2 Stereokuvan laskeminen. 2008 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
LIITE 1 VIRHEEN ARVIOINNISTA
 Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Shrödingerin yhtälön johto
 Shrödingerin yhtälön johto Tomi Parviainen 4. maaliskuuta 2018 Sisältö 1 Schrödingerin yhtälön johto tasaisessa liikkeessä olevalle elektronille 1 2 Schrödingerin yhtälöstä aaltoyhtälöön kiihtyvässä liikkeessä
Shrödingerin yhtälön johto Tomi Parviainen 4. maaliskuuta 2018 Sisältö 1 Schrödingerin yhtälön johto tasaisessa liikkeessä olevalle elektronille 1 2 Schrödingerin yhtälöstä aaltoyhtälöön kiihtyvässä liikkeessä
A-osa. Ratkaise kaikki tämän osan tehtävät. Tehtävät arvostellaan pistein 0-6. Taulukkokirjaa saa käyttää apuna, laskinta ei.
 PITKÄ MATEMATIIKKA PRELIMINÄÄRIKOE 7..07 NIMI: A-osa. Ratkaise kaikki tämän osan tehtävät. Tehtävät arvostellaan pistein 0-. Taulukkokirjaa saa käyttää apuna, laskinta ei.. Valitse oikea vaihtoehto ja
PITKÄ MATEMATIIKKA PRELIMINÄÄRIKOE 7..07 NIMI: A-osa. Ratkaise kaikki tämän osan tehtävät. Tehtävät arvostellaan pistein 0-. Taulukkokirjaa saa käyttää apuna, laskinta ei.. Valitse oikea vaihtoehto ja
4 LUKUJONOT JA SUMMAT
 Huippu Kertaus Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 0.7.08 4 LUKUJONOT JA SUMMAT ALOITA PERUSTEISTA 45A. Määritetään lukujonon (a n ) kolme ensimmäistä jäsentä ja sadas jäsen a 00 sijoittamalla
Huippu Kertaus Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 0.7.08 4 LUKUJONOT JA SUMMAT ALOITA PERUSTEISTA 45A. Määritetään lukujonon (a n ) kolme ensimmäistä jäsentä ja sadas jäsen a 00 sijoittamalla
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä.
 Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä.") MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016
KJR-C1001: Statiikka L2 Luento : voiman momentti ja voimasysteemit
 KJR-C1001: Statiikka L2 Luento 21.2.2018: voiman momentti ja voimasysteemit Apulaisprofessori Konetekniikan laitos Luennon osaamistavoitteet Tämän päiväisen luennon jälkeen opiskelija Pystyy muodostamaan,
KJR-C1001: Statiikka L2 Luento 21.2.2018: voiman momentti ja voimasysteemit Apulaisprofessori Konetekniikan laitos Luennon osaamistavoitteet Tämän päiväisen luennon jälkeen opiskelija Pystyy muodostamaan,
4.1 Kaksi pistettä määrää suoran
 4.1 Kaksi pistettä määrää suoran Kerrataan aluksi kurssin MAA1 tietoja. Geometrisesti on selvää, että tason suora on täysin määrätty, kun tunnetaan sen kaksi pistettä. Joskus voi tulla vastaan tilanne,
4.1 Kaksi pistettä määrää suoran Kerrataan aluksi kurssin MAA1 tietoja. Geometrisesti on selvää, että tason suora on täysin määrätty, kun tunnetaan sen kaksi pistettä. Joskus voi tulla vastaan tilanne,
3 TOISEN ASTEEN POLYNOMIFUNKTIO
 3 TOISEN ASTEEN POLYNOMIFUNKTIO POHDITTAVAA 1. Kuvasta voidaan arvioida, että frisbeegolfkiekko käy noin 9 metrin korkeudella ja se lentää noin 40 metrin päähän. Vastaus: Frisbeegolfkiekko käy n. 9 m:n
3 TOISEN ASTEEN POLYNOMIFUNKTIO POHDITTAVAA 1. Kuvasta voidaan arvioida, että frisbeegolfkiekko käy noin 9 metrin korkeudella ja se lentää noin 40 metrin päähän. Vastaus: Frisbeegolfkiekko käy n. 9 m:n
5.3 Ensimmäisen asteen polynomifunktio
 Yllä olevat polynomit P ( x) = 2 x + 1 ja Q ( x) = 2x 1 ovat esimerkkejä 1. asteen polynomifunktioista: muuttujan korkein potenssi on yksi. Yleisessä 1. asteen polynomifunktioissa on lisäksi vakiotermi;
Yllä olevat polynomit P ( x) = 2 x + 1 ja Q ( x) = 2x 1 ovat esimerkkejä 1. asteen polynomifunktioista: muuttujan korkein potenssi on yksi. Yleisessä 1. asteen polynomifunktioissa on lisäksi vakiotermi;
1 Ensimmäisen asteen polynomifunktio
 Ensimmäisen asteen polynomifunktio ENNAKKOTEHTÄVÄT. a) f(x) = x 4 b) Nollakohdassa funktio f saa arvon nolla eli kuvaaja kohtaa x-akselin. Kuvaajan perusteella funktion nollakohta on x,. c) Funktion f
Ensimmäisen asteen polynomifunktio ENNAKKOTEHTÄVÄT. a) f(x) = x 4 b) Nollakohdassa funktio f saa arvon nolla eli kuvaaja kohtaa x-akselin. Kuvaajan perusteella funktion nollakohta on x,. c) Funktion f
Radiotekniikan sovelluksia
 Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
TEHTÄVIEN RATKAISUT. b) 105-kiloisella puolustajalla on yhtä suuri liikemäärä, jos nopeus on kgm 712 p m 105 kg
 105-kiloisella puolustajalla on yhtä suuri liikemäärä, jos nopeus on kgm 712 p m 105 kg") TEHTÄVIEN RATKAISUT 15-1. a) Hyökkääjän liikemäärä on p = mv = 89 kg 8,0 m/s = 71 kgm/s. b) 105-kiloisella puolustajalla on yhtä suuri liikemäärä, jos nopeus on kgm 71 p v = = s 6,8 m/s. m 105 kg 15-.
TEHTÄVIEN RATKAISUT 15-1. a) Hyökkääjän liikemäärä on p = mv = 89 kg 8,0 m/s = 71 kgm/s. b) 105-kiloisella puolustajalla on yhtä suuri liikemäärä, jos nopeus on kgm 71 p v = = s 6,8 m/s. m 105 kg 15-.
Kertausosa. 5. Merkitään sädettä kirjaimella r. Kaaren pituus on tällöin r a) sin = 0, , c) tan = 0,
 sin = 0, , c) tan = 0,") Kertausosa. a),6 60 576 Peruuttaessa pyörähdyssuunta on vastapäivään. Kulma on siis,4 60 864 a) 576 864 0,88m. a) α b 0,6769... 0,68 (rad) r,m 8cm β,90...,9 (rad) 4cm a) α 0,68 (rad) β,9 (rad). a) 5,0
Kertausosa. a),6 60 576 Peruuttaessa pyörähdyssuunta on vastapäivään. Kulma on siis,4 60 864 a) 576 864 0,88m. a) α b 0,6769... 0,68 (rad) r,m 8cm β,90...,9 (rad) 4cm a) α 0,68 (rad) β,9 (rad). a) 5,0
FYSIIKAN LABORATORIOTYÖT 2 HILA JA PRISMA
 FYSIIKAN LABORATORIOTYÖT HILA JA PRISMA MIKKO LAINE 9. toukokuuta 05. Johdanto Tässä työssä muodostamme lasiprisman dispersiokäyrän ja määritämme työn tekijän silmän herkkyysrajan punaiselle valolle. Lisäksi
FYSIIKAN LABORATORIOTYÖT HILA JA PRISMA MIKKO LAINE 9. toukokuuta 05. Johdanto Tässä työssä muodostamme lasiprisman dispersiokäyrän ja määritämme työn tekijän silmän herkkyysrajan punaiselle valolle. Lisäksi
Luku 6. Dynaaminen ohjelmointi. 6.1 Funktion muisti
 Luku 6 Dynaaminen ohjelmointi Dynaamisessa ohjelmoinnissa on ideana jakaa ongelman ratkaisu pienempiin osaongelmiin, jotka voidaan ratkaista toisistaan riippumattomasti. Jokaisen osaongelman ratkaisu tallennetaan
Luku 6 Dynaaminen ohjelmointi Dynaamisessa ohjelmoinnissa on ideana jakaa ongelman ratkaisu pienempiin osaongelmiin, jotka voidaan ratkaista toisistaan riippumattomasti. Jokaisen osaongelman ratkaisu tallennetaan
3 Määrätty integraali
 Määrätty integraali. a) Muodostuva alue on kolmio, jonka kanta on. Kolmion korkeus on funktion arvo kohdassa, eli f() = = 6. Lasketaan A() kolmion pintaalana. 6 A() 6 Vastaus: A() = 6 b) Muodostuva alue
Määrätty integraali. a) Muodostuva alue on kolmio, jonka kanta on. Kolmion korkeus on funktion arvo kohdassa, eli f() = = 6. Lasketaan A() kolmion pintaalana. 6 A() 6 Vastaus: A() = 6 b) Muodostuva alue
Mikroskooppisten kohteiden
 Mikroskooppisten kohteiden lämpötilamittaukset itt t Maksim Shpak Planckin laki I BB ( λ T ) = 2hc λ, 5 2 1 hc λ e λkt 11 I ( λ, T ) = ε ( λ, T ) I ( λ T ) m BB, 0 < ε
Mikroskooppisten kohteiden lämpötilamittaukset itt t Maksim Shpak Planckin laki I BB ( λ T ) = 2hc λ, 5 2 1 hc λ e λkt 11 I ( λ, T ) = ε ( λ, T ) I ( λ T ) m BB, 0 < ε
Kuva 1: Yksinkertainen siniaalto. Amplitudi kertoo heilahduksen laajuuden ja aallonpituus
 Kuva 1: Yksinkertainen siniaalto. Amplitudi kertoo heilahduksen laajuuden ja aallonpituus värähtelytiheyden. 1 Funktiot ja aallot Aiemmin käsiteltiin funktioita ja miten niiden avulla voidaan kuvata fysiikan
Kuva 1: Yksinkertainen siniaalto. Amplitudi kertoo heilahduksen laajuuden ja aallonpituus värähtelytiheyden. 1 Funktiot ja aallot Aiemmin käsiteltiin funktioita ja miten niiden avulla voidaan kuvata fysiikan
Varjoliidon ja Riippuliidon Suomen ennätysten suorittaminen
 1 Varjoliidon ja Riippuliidon Suomen ennätysten suorittaminen Suomen Ilmailuliiton Liidintoimikunta on hyväksynyt nämä säännöt 14.4.2015. Säännöt astuvat voimaan välittömästi ja ovat voimassa toistaiseksi.
1 Varjoliidon ja Riippuliidon Suomen ennätysten suorittaminen Suomen Ilmailuliiton Liidintoimikunta on hyväksynyt nämä säännöt 14.4.2015. Säännöt astuvat voimaan välittömästi ja ovat voimassa toistaiseksi.
Kertaus. Integraalifunktio ja integrointi. 2( x 1) 1 2x. 3( x 1) 1 (3x 1) KERTAUSTEHTÄVIÄ. K1. a)
 1 2x. 3( x 1) 1 (3x 1) KERTAUSTEHTÄVIÄ. K1. a)") Juuri 9 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 5.5.6 Kertaus Integraalifunktio ja integrointi KERTAUSTEHTÄVIÄ K. a) ( )d C C b) c) d e e C cosd cosd sin C K. Funktiot F ja F ovat saman
Juuri 9 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 5.5.6 Kertaus Integraalifunktio ja integrointi KERTAUSTEHTÄVIÄ K. a) ( )d C C b) c) d e e C cosd cosd sin C K. Funktiot F ja F ovat saman
Juuri 12 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty
 Juuri Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 7.5.08 Kertaus K. a) Polynomi P() = + 8 on jaollinen polynomilla Q() =, jos = on polynomin P nollakohta, eli P() = 0. P() = + 8 = 54 08 +
Juuri Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 7.5.08 Kertaus K. a) Polynomi P() = + 8 on jaollinen polynomilla Q() =, jos = on polynomin P nollakohta, eli P() = 0. P() = + 8 = 54 08 +
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 24.2.2016 Susanna Hurme Päivän aihe: Voiman momentin käsite (Kirjan luvut 4.1-4.6) Mikä on voiman momentti? Määritetään momentti skalaari- ja vektorimuodossa Opitaan
KJR-C1001 Statiikka ja dynamiikka Luento 24.2.2016 Susanna Hurme Päivän aihe: Voiman momentin käsite (Kirjan luvut 4.1-4.6) Mikä on voiman momentti? Määritetään momentti skalaari- ja vektorimuodossa Opitaan
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 16.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinetiikka (Kirjan luvut 12.6, 13.1-13.3 ja 17.3) Oppimistavoitteet Ymmärtää, miten Newtonin toisen lain
KJR-C1001 Statiikka ja dynamiikka Luento 16.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinetiikka (Kirjan luvut 12.6, 13.1-13.3 ja 17.3) Oppimistavoitteet Ymmärtää, miten Newtonin toisen lain
VEKTORIANALYYSIN HARJOITUKSET: VIIKKO 4
 VEKTORIANALYYSIN HARJOITUKSET: VIIKKO 4 Jokaisen tehtävän jälkeen on pieni kommentti tehtävään liittyen Nämä eivät sisällä mitään kovin kriittistä tietoa tehtävään liittyen, joten niistä ei tarvitse välittää
VEKTORIANALYYSIN HARJOITUKSET: VIIKKO 4 Jokaisen tehtävän jälkeen on pieni kommentti tehtävään liittyen Nämä eivät sisällä mitään kovin kriittistä tietoa tehtävään liittyen, joten niistä ei tarvitse välittää
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 23.2.2016 Susanna Hurme Tervetuloa kurssille! Mitä on statiikka? Mitä on dynamiikka? Miksi niitä opiskellaan? Päivän aihe: Voiman käsite ja partikkelin tasapaino
KJR-C1001 Statiikka ja dynamiikka Luento 23.2.2016 Susanna Hurme Tervetuloa kurssille! Mitä on statiikka? Mitä on dynamiikka? Miksi niitä opiskellaan? Päivän aihe: Voiman käsite ja partikkelin tasapaino
Visibiliteetti ja kohteen kirkkausjakauma
 Visibiliteetti ja kohteen kirkkausjakauma Interferoteriassa havaittava suure on visibiliteetti V (u, v) = P n (x, y)i ν (x, y)e i2π(ux+vy) dxdy kohde Taivaannapa m Koordinaatisto: u ja v: B/λ:n projektioita
Visibiliteetti ja kohteen kirkkausjakauma Interferoteriassa havaittava suure on visibiliteetti V (u, v) = P n (x, y)i ν (x, y)e i2π(ux+vy) dxdy kohde Taivaannapa m Koordinaatisto: u ja v: B/λ:n projektioita
Luku 8. Aluekyselyt. 8.1 Summataulukko
 Luku 8 Aluekyselyt Aluekysely on tiettyä taulukon väliä koskeva kysely. Tyypillisiä aluekyselyitä ovat, mikä on taulukon välin lukujen summa tai pienin luku välillä. Esimerkiksi seuraavassa taulukossa
Luku 8 Aluekyselyt Aluekysely on tiettyä taulukon väliä koskeva kysely. Tyypillisiä aluekyselyitä ovat, mikä on taulukon välin lukujen summa tai pienin luku välillä. Esimerkiksi seuraavassa taulukossa
massa vesi sokeri muu aine tuore luumu b 0,73 b 0,08 b = 0,28 a y kuivattu luumu a x 0,28 a y 0,08 = 0,28 0,08 = 3,5
 A1. Tehdään taulukko luumun massoista ja pitoisuuksista ennen ja jälkeen kuivatuksen. Muistetaan, että kuivatuksessa haihtuu vain vettä. Näin ollen sokerin ja muun aineen massa on sama molemmilla riveillä.
A1. Tehdään taulukko luumun massoista ja pitoisuuksista ennen ja jälkeen kuivatuksen. Muistetaan, että kuivatuksessa haihtuu vain vettä. Näin ollen sokerin ja muun aineen massa on sama molemmilla riveillä.
Kertaus. x x x. K1. a) b) x 5 x 6 = x 5 6 = x 1 = 1 x, x 0. K2. a) a a a a, a > 0
 b) x 5 x 6 = x 5 6 = x 1 = 1 x, x 0. K2. a) a a a a, a > 0") Juuri 8 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 8.9.07 Kertaus K. a) 6 4 64 0, 0 0 0 0 b) 5 6 = 5 6 = =, 0 c) d) K. a) b) c) d) 4 4 4 7 4 ( ) 7 7 7 7 87 56 7 7 7 6 6 a a a, a > 0 6 6 a
Juuri 8 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 8.9.07 Kertaus K. a) 6 4 64 0, 0 0 0 0 b) 5 6 = 5 6 = =, 0 c) d) K. a) b) c) d) 4 4 4 7 4 ( ) 7 7 7 7 87 56 7 7 7 6 6 a a a, a > 0 6 6 a
23 VALON POLARISAATIO 23.1 Johdanto. 23.2 Valon polarisointi ja polarisaation havaitseminen
 3 VALON POLARISAATIO 3.1 Johdanto Mawellin htälöiden avulla voidaan johtaa aaltohtälö sähkömagneettisen säteiln etenemiselle väliaineessa. Mawellin htälöiden ratkaisusta seuraa aina, että valo on poikittaista
3 VALON POLARISAATIO 3.1 Johdanto Mawellin htälöiden avulla voidaan johtaa aaltohtälö sähkömagneettisen säteiln etenemiselle väliaineessa. Mawellin htälöiden ratkaisusta seuraa aina, että valo on poikittaista
Luento 11: Stereomallin ulkoinen orientointi
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Luento 10: Työ, energia ja teho. Johdanto Työ ja kineettinen energia Teho
 Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho 1 / 23 Luennon sisältö Johdanto Työ ja kineettinen energia Teho 2 / 23 Johdanto Energia suure, joka voidaan muuttaa muodosta toiseen,
Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho 1 / 23 Luennon sisältö Johdanto Työ ja kineettinen energia Teho 2 / 23 Johdanto Energia suure, joka voidaan muuttaa muodosta toiseen,
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 8 1 Suunnattu derivaatta Aluksi tarkastelemme vektoreita, koska ymmärrys vektoreista helpottaa alla olevien asioiden omaksumista. Kun liikutaan tasossa eli avaruudessa
Matematiikan tukikurssi Kurssikerta 8 1 Suunnattu derivaatta Aluksi tarkastelemme vektoreita, koska ymmärrys vektoreista helpottaa alla olevien asioiden omaksumista. Kun liikutaan tasossa eli avaruudessa
Suorakulmainen kolmio
 Suorakulmainen kolmio 1. Määritä terävä kulma α, β ja γ, kun sinα = 0,5782, cos β = 0,745 ja tanγ = 1,222. π 2. Määritä trigonometristen funktioiden sini, kosini ja tangentti, kun kulma α = ja 3 β = 73,2
Suorakulmainen kolmio 1. Määritä terävä kulma α, β ja γ, kun sinα = 0,5782, cos β = 0,745 ja tanγ = 1,222. π 2. Määritä trigonometristen funktioiden sini, kosini ja tangentti, kun kulma α = ja 3 β = 73,2
Miehittämättömän lennokin ottamien ilmakuvien käyttö energiakäyttöön soveltuvien biomassojen määrän nopeassa arvioinnissa
 Miehittämättömän lennokin ottamien ilmakuvien käyttö energiakäyttöön soveltuvien biomassojen määrän nopeassa arvioinnissa Anna Lopatina, Itä-Suomen yliopisto, Metsätieteiden osasto, Anna.lopatina@uef.fi
Miehittämättömän lennokin ottamien ilmakuvien käyttö energiakäyttöön soveltuvien biomassojen määrän nopeassa arvioinnissa Anna Lopatina, Itä-Suomen yliopisto, Metsätieteiden osasto, Anna.lopatina@uef.fi
Valitse vain kuusi tehtävää! Tee etusivun yläreunaan pisteytysruudukko! Kaikkiin tehtäviin tarvittavat välivaiheet esille!
 5.4.013 Jussi Tyni 1. Selitä ja piirrä seuraavat lyhyesti: a) Kehäkulma ja keskikulma b) Todista, että kolmion kulmien summa on 180 astetta. Selitä päätelmiesi perustelut.. a) Suorakulmaisen kolmion kateetit
5.4.013 Jussi Tyni 1. Selitä ja piirrä seuraavat lyhyesti: a) Kehäkulma ja keskikulma b) Todista, että kolmion kulmien summa on 180 astetta. Selitä päätelmiesi perustelut.. a) Suorakulmaisen kolmion kateetit
Ratkaisu: Maksimivalovoiman lauseke koostuu heijastimen maksimivalovoimasta ja valonlähteestä suoraan (ilman heijastumista) tulevasta valovoimasta:
 tulevasta valovoimasta:") LASKUHARJOITUS 1 VALAISIMIEN OPTIIKKA Tehtävä 1 Pistemäinen valonlähde (Φ = 1000 lm, valokappaleen luminanssi L = 2500 kcd/m 2 ) sijoitetaan 15 cm suuruisen pyörähdysparaboloidin muotoisen peiliheijastimen
LASKUHARJOITUS 1 VALAISIMIEN OPTIIKKA Tehtävä 1 Pistemäinen valonlähde (Φ = 1000 lm, valokappaleen luminanssi L = 2500 kcd/m 2 ) sijoitetaan 15 cm suuruisen pyörähdysparaboloidin muotoisen peiliheijastimen
7.4 Fotometria CCD kameralla
 7.4 Fotometria CCD kameralla Yleisin CCDn käyttötapa Yleensä CCDn edessä käytetään aina jotain suodatinta, jolloin kuvasta saadaan siistimpi valosaaste UV:n ja IR:n interferenssikuviot ilmakehän dispersion
7.4 Fotometria CCD kameralla Yleisin CCDn käyttötapa Yleensä CCDn edessä käytetään aina jotain suodatinta, jolloin kuvasta saadaan siistimpi valosaaste UV:n ja IR:n interferenssikuviot ilmakehän dispersion
PAINOVOIMAMITTAUKSET JA KALLIONPINNAN SYVYYSTULKINNAT
 1 (24) PAINOVOIMAMITTAUKSET JA KALLIONPINNAN SYVYYSTULKINNAT Tuire Valjus Menetelmän perusteista Painovoimamittausten avulla voidaan tutkia tiheydeltään ympäristöstä poikkeavien muodostumien paksuutta
1 (24) PAINOVOIMAMITTAUKSET JA KALLIONPINNAN SYVYYSTULKINNAT Tuire Valjus Menetelmän perusteista Painovoimamittausten avulla voidaan tutkia tiheydeltään ympäristöstä poikkeavien muodostumien paksuutta
Johtuuko tämä ilmastonmuutoksesta? - kasvihuoneilmiön voimistuminen vaikutus sääolojen vaihteluun
 Johtuuko tämä ilmastonmuutoksesta? - kasvihuoneilmiön voimistuminen vaikutus sääolojen vaihteluun Jouni Räisänen Helsingin yliopiston fysiikan laitos 15.1.2010 Vuorokauden keskilämpötila Talvi 2007-2008
Johtuuko tämä ilmastonmuutoksesta? - kasvihuoneilmiön voimistuminen vaikutus sääolojen vaihteluun Jouni Räisänen Helsingin yliopiston fysiikan laitos 15.1.2010 Vuorokauden keskilämpötila Talvi 2007-2008
Testejä suhdeasteikollisille muuttujille
 Ilkka Mellin Tilastolliset menetelmät Osa 3: Tilastolliset testit Testejä suhdeasteikollisille muuttujille TKK (c) Ilkka Mellin (007) 1 Testejä suhdeasteikollisille muuttujille >> Testit normaalijakauman
Ilkka Mellin Tilastolliset menetelmät Osa 3: Tilastolliset testit Testejä suhdeasteikollisille muuttujille TKK (c) Ilkka Mellin (007) 1 Testejä suhdeasteikollisille muuttujille >> Testit normaalijakauman
Kolmioitten harjoituksia. Säännöllisten monikulmioitten harjoituksia. Pythagoraan lauseeseen liittyviä harjoituksia
 Kolmioitten harjoituksia Piirrä kolmio, jonka sivujen pituudet ovat 4cm, 5 cm ja 10 cm. Minkä yleisen kolmion sivujen pituuksia ja niitten eroja koskevan johtopäätöksen vedät? Määritä huippukulman α suuruus,
Kolmioitten harjoituksia Piirrä kolmio, jonka sivujen pituudet ovat 4cm, 5 cm ja 10 cm. Minkä yleisen kolmion sivujen pituuksia ja niitten eroja koskevan johtopäätöksen vedät? Määritä huippukulman α suuruus,
VIII LISÄTIETOA 8.1. HAVAINTOVIRHEISTÄ
 56 VIII LISÄTIETOA 8.1. HAVAINTOVIRHEISTÄ Hyvällä havaitsijalla keskimääräinen virhe tähdenlennon kirkkauden arvioimisessa on noin 0.4 magnitudia silloin, kun meteori näkyy havaitsijan näkökentän keskellä.
56 VIII LISÄTIETOA 8.1. HAVAINTOVIRHEISTÄ Hyvällä havaitsijalla keskimääräinen virhe tähdenlennon kirkkauden arvioimisessa on noin 0.4 magnitudia silloin, kun meteori näkyy havaitsijan näkökentän keskellä.
Projektisuunnitelma ja johdanto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Paula Sirén
 Projektisuunnitelma ja johdanto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Paula Sirén Sonifikaatio Menetelmä Sovelluksia Mahdollisuuksia Ongelmia Sonifikaatiosovellus: NIR-spektroskopia kariesmittauksissa
Projektisuunnitelma ja johdanto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Paula Sirén Sonifikaatio Menetelmä Sovelluksia Mahdollisuuksia Ongelmia Sonifikaatiosovellus: NIR-spektroskopia kariesmittauksissa
PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9.2.2011
 PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9..0 Kokeessa saa vastata enintään kymmeneen tehtävään.. Sievennä a) 9 x x 6x + 9, b) 5 9 009 a a, c) log 7 + lne 7. Muovailuvahasta tehty säännöllinen tetraedri muovataan
PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9..0 Kokeessa saa vastata enintään kymmeneen tehtävään.. Sievennä a) 9 x x 6x + 9, b) 5 9 009 a a, c) log 7 + lne 7. Muovailuvahasta tehty säännöllinen tetraedri muovataan
KRISTALLOGRAFIASSA TARVITTAVAA MATEMA- TIIKKAA
 KRISTALLOGRAFIASSA TARVITTAVAA MATEMA- TIIKKAA Aloita kertaamalla hilan indeksointi niin, että osaat kuutiollisen kiteen tasojen ja suuntien Miller-indeksit. Vektorit määritellään yleisessä muodossa r
KRISTALLOGRAFIASSA TARVITTAVAA MATEMA- TIIKKAA Aloita kertaamalla hilan indeksointi niin, että osaat kuutiollisen kiteen tasojen ja suuntien Miller-indeksit. Vektorit määritellään yleisessä muodossa r
Luento 7 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
2 Pistejoukko koordinaatistossa
 Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
ELEC-A3110 Mekaniikka (5 op)
") ELEC-A3110 Mekaniikka (5 op) Yliopistonlehtori, tkt Sami Kujala Mikro- ja nanotekniikan laitos Syksy 2016 1 / 21 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia
ELEC-A3110 Mekaniikka (5 op) Yliopistonlehtori, tkt Sami Kujala Mikro- ja nanotekniikan laitos Syksy 2016 1 / 21 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia
MATEMATIIKAN KOE, LYHYT OPPIMÄÄRÄ HYVÄN VASTAUKSEN PIIRTEITÄ
 MATEMATIIKAN KOE, LYHYT OPPIMÄÄRÄ 24.9.2019 HYVÄN VASTAUKSEN PIIRTEITÄ Alustavat hyvän vastauksen piirteet on suuntaa-antava kuvaus kokeen tehtäviin odotetuista vastauksista ja tarkoitettu ensisijaisesti
MATEMATIIKAN KOE, LYHYT OPPIMÄÄRÄ 24.9.2019 HYVÄN VASTAUKSEN PIIRTEITÄ Alustavat hyvän vastauksen piirteet on suuntaa-antava kuvaus kokeen tehtäviin odotetuista vastauksista ja tarkoitettu ensisijaisesti
origo III neljännes D
 Sijoita pisteet A(1,4) ja B(4,5;5) sekä C(-3,4) ja D(-4,--5) y II neljännes C A I neljännes B x origo III neljännes D IV neljännes KOTIT. Sijoita ja nimeä koordinaatistoon pisteitä niin, että pisteet yhdistettäessä
Sijoita pisteet A(1,4) ja B(4,5;5) sekä C(-3,4) ja D(-4,--5) y II neljännes C A I neljännes B x origo III neljännes D IV neljännes KOTIT. Sijoita ja nimeä koordinaatistoon pisteitä niin, että pisteet yhdistettäessä
x + 1 πx + 2y = 6 2y = 6 x 1 2 πx y = x 1 4 πx Ikkunan pinta-ala on suorakulmion ja puoliympyrän pinta-alojen summa, eli
 BM0A5810 - Differentiaalilaskenta ja sovellukset Harjoitus, Syksy 015 1. a) Funktio f ) = 1) vaihtaa merkkinsä pisteissä = 1, = 0 ja = 1. Lisäksi se on pariton funktio joten voimme laskea vain pinta-alan
BM0A5810 - Differentiaalilaskenta ja sovellukset Harjoitus, Syksy 015 1. a) Funktio f ) = 1) vaihtaa merkkinsä pisteissä = 1, = 0 ja = 1. Lisäksi se on pariton funktio joten voimme laskea vain pinta-alan
2 Osittaisderivaattojen sovelluksia
 2 Osittaisderivaattojen sovelluksia 2.1 Ääriarvot Yhden muuttujan funktiolla f(x) on lokaali maksimiarvo (lokaali minimiarvo) pisteessä a, jos f(x) f(a) (f(x) f(a)) kaikilla x:n arvoilla riittävän lähellä
2 Osittaisderivaattojen sovelluksia 2.1 Ääriarvot Yhden muuttujan funktiolla f(x) on lokaali maksimiarvo (lokaali minimiarvo) pisteessä a, jos f(x) f(a) (f(x) f(a)) kaikilla x:n arvoilla riittävän lähellä
a) Sievennä lauseke 1+x , kun x 0jax 1. b) Aseta luvut 2, 5 suuruusjärjestykseen ja perustele vastauksesi. 3 3 ja
 Sievennä lauseke 1+x , kun x 0jax 1. b) Aseta luvut 2, 5 suuruusjärjestykseen ja perustele vastauksesi. 3 3 ja") 1 YLIOPPILASTUTKINTO- LAUTAKUNTA 1.10.2018 MATEMATIIKAN KOE PITKÄ OPPIMÄÄRÄ A-osa Ratkaise kaikki tämän osan tehtävät 1 4. Tehtävät arvostellaan pistein 0 6. Kunkin tehtävän ratkaisu kirjoitetaan tehtävän
1 YLIOPPILASTUTKINTO- LAUTAKUNTA 1.10.2018 MATEMATIIKAN KOE PITKÄ OPPIMÄÄRÄ A-osa Ratkaise kaikki tämän osan tehtävät 1 4. Tehtävät arvostellaan pistein 0 6. Kunkin tehtävän ratkaisu kirjoitetaan tehtävän
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA. Jouko Esko n85748 Juho Jaakkola n86633. Dynaaminen Kenttäteoria GENERAATTORI.
 VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Jouko Esko n85748 Juho Jaakkola n86633 Dynaaminen Kenttäteoria GENERAATTORI Sivumäärä: 10 Jätetty tarkastettavaksi: 06.03.2008 Työn tarkastaja Maarit
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Jouko Esko n85748 Juho Jaakkola n86633 Dynaaminen Kenttäteoria GENERAATTORI Sivumäärä: 10 Jätetty tarkastettavaksi: 06.03.2008 Työn tarkastaja Maarit
Tekijä Pitkä matematiikka Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4).
, ( 2,1), (1, 0), (4, 1) ja ( 11, 4).") Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Polaarisatelliittidataan perustuva lumentunnistusalgoritmi (valmiin työn esittely)
") Polaarisatelliittidataan perustuva lumentunnistusalgoritmi (valmiin työn esittely) 24.01.2011 Ohjaaja: Niilo Siljamo, Ilmatieteen Laitos Valvoja: Harri Ehtamo Esityksen sisältö Termejä Tausta Menetelmät
Polaarisatelliittidataan perustuva lumentunnistusalgoritmi (valmiin työn esittely) 24.01.2011 Ohjaaja: Niilo Siljamo, Ilmatieteen Laitos Valvoja: Harri Ehtamo Esityksen sisältö Termejä Tausta Menetelmät
Wien R-J /home/heikki/cele2008_2010/musta_kappale_approksimaatio Wed Mar 13 15:33:
 1.2 T=12000 K 10 2 T=12000 K 1.0 Wien R-J 10 0 Wien R-J B λ (10 15 W/m 3 /sterad) 0.8 0.6 0.4 B λ (10 15 W/m 3 /sterad) 10-2 10-4 10-6 10-8 0.2 10-10 0.0 0 200 400 600 800 1000 nm 10-12 10 0 10 1 10 2
1.2 T=12000 K 10 2 T=12000 K 1.0 Wien R-J 10 0 Wien R-J B λ (10 15 W/m 3 /sterad) 0.8 0.6 0.4 B λ (10 15 W/m 3 /sterad) 10-2 10-4 10-6 10-8 0.2 10-10 0.0 0 200 400 600 800 1000 nm 10-12 10 0 10 1 10 2
MAB3 - Harjoitustehtävien ratkaisut:
 MAB - Harjoitustehtävien ratkaisut: Funktio. Piirretään koordinaatistoakselit ja sijoitetaan pisteet:. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä. Funktiolla
MAB - Harjoitustehtävien ratkaisut: Funktio. Piirretään koordinaatistoakselit ja sijoitetaan pisteet:. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä. Funktiolla
6.6. Tasoitus ja terävöinti
 6.6. Tasoitus ja terävöinti Seuraavassa muutetaan pikselin arvoa perustuen mpäristön pikselien ominaisuuksiin. Kuvan 6.18.a nojalla ja Lukujen 3.4. ja 3.5. harmaasävjen käsittelssä esitellillä menetelmillä
6.6. Tasoitus ja terävöinti Seuraavassa muutetaan pikselin arvoa perustuen mpäristön pikselien ominaisuuksiin. Kuvan 6.18.a nojalla ja Lukujen 3.4. ja 3.5. harmaasävjen käsittelssä esitellillä menetelmillä
Luento 6 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Osakesalkun optimointi. Anni Halkola Turun yliopisto 2016
 Osakesalkun optimointi Anni Halkola Turun yliopisto 2016 Artikkeli Gleb Beliakov & Adil Bagirov (2006) Non-smooth optimization methods for computation of the Conditional Value-at-risk and portfolio optimization.
Osakesalkun optimointi Anni Halkola Turun yliopisto 2016 Artikkeli Gleb Beliakov & Adil Bagirov (2006) Non-smooth optimization methods for computation of the Conditional Value-at-risk and portfolio optimization.
(a) Potentiaali ja virtafunktiot saadaan suoraan summaamalla lähteen ja pyörteen funktiot. Potentiaalifunktioksi
 Potentiaali ja virtafunktiot saadaan suoraan summaamalla lähteen ja pyörteen funktiot. Potentiaalifunktioksi") Tehtävä 1 Tornadon virtauskenttää voidaan approksimoida kaksiulotteisen nielun ja pyörteen summana Oleta, että nielun voimakkuus on m < ja pyörteen voimakkuus on > (a Määritä tornadon potentiaali- ja virtafunktiot
Tehtävä 1 Tornadon virtauskenttää voidaan approksimoida kaksiulotteisen nielun ja pyörteen summana Oleta, että nielun voimakkuus on m < ja pyörteen voimakkuus on > (a Määritä tornadon potentiaali- ja virtafunktiot
Ultraäänen kuvausartefaktat. UÄ-kuvantamisen perusoletukset. Outi Pelkonen OYS, Radiologian Klinikka 29.4.2005
 Ultraäänen kuvausartefaktat Outi Pelkonen OYS, Radiologian Klinikka 29.4.2005 kaikissa radiologisissa kuvissa on artefaktoja UÄ:ssä artefaktat ovat kaikuja, jotka näkyvät kuvassa, mutta eivät vastaa sijainniltaan
Ultraäänen kuvausartefaktat Outi Pelkonen OYS, Radiologian Klinikka 29.4.2005 kaikissa radiologisissa kuvissa on artefaktoja UÄ:ssä artefaktat ovat kaikuja, jotka näkyvät kuvassa, mutta eivät vastaa sijainniltaan
Matikkaa KA1-kurssilaisille, osa 3: suoran piirtäminen koordinaatistoon
 Matikkaa KA1-kurssilaisille, osa 3: suoran piirtäminen koordinaatistoon KA1-kurssi on ehkä mahdollista läpäistä, vaikkei osaisikaan piirtää suoraa yhtälön perusteella. Mutta muut kansiksen kurssit, no
Matikkaa KA1-kurssilaisille, osa 3: suoran piirtäminen koordinaatistoon KA1-kurssi on ehkä mahdollista läpäistä, vaikkei osaisikaan piirtää suoraa yhtälön perusteella. Mutta muut kansiksen kurssit, no
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
3.4 Liike-energiasta ja potentiaalienergiasta
 Työperiaatteeksi (the work-energy theorem) kutsutaan sitä että suljetun systeemin liike-energian muutos Δ on voiman systeemille tekemä työ W Tämä on yksi konservatiivisen voiman erityistapaus Työperiaate
Työperiaatteeksi (the work-energy theorem) kutsutaan sitä että suljetun systeemin liike-energian muutos Δ on voiman systeemille tekemä työ W Tämä on yksi konservatiivisen voiman erityistapaus Työperiaate
Vedetään kiekkoa erisuuruisilla voimilla! havaitaan kiekon saaman kiihtyvyyden olevan suoraan verrannollinen käytetyn voiman suuruuteen
 4.3 Newtonin II laki Esim. jääkiekko märällä jäällä: pystysuuntaiset voimat kumoavat toisensa: jään kiekkoon kohdistama tukivoima n on yhtäsuuri, mutta vastakkaismerkkinen kuin kiekon paino w: n = w kitka
4.3 Newtonin II laki Esim. jääkiekko märällä jäällä: pystysuuntaiset voimat kumoavat toisensa: jään kiekkoon kohdistama tukivoima n on yhtäsuuri, mutta vastakkaismerkkinen kuin kiekon paino w: n = w kitka
MAB3 - Harjoitustehtävien ratkaisut:
 MAB3 - Harjoitustehtävien ratkaisut: 1 Funktio 1.1 Piirretään koordinaatistoakselit ja sijoitetaan pisteet: 1 1. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä.
MAB3 - Harjoitustehtävien ratkaisut: 1 Funktio 1.1 Piirretään koordinaatistoakselit ja sijoitetaan pisteet: 1 1. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä.