2. Digitaalisten kuvien peruskäsitteet 2.1. Visuaalinen havaitseminen
|
|
|
- Sari Jaakkola
- 5 vuotta sitten
- Katselukertoja:
Transkriptio
1 2. Digitaalisten kuvien peruskäsitteet 2.1. Visuaalinen havaitseminen Tässä luvussa käsitellään digitaalisten kuvien perusasioista, aina kuvien näkemisestä pikseleihin ja tarvittaviin laskentamenetelmiin asti. Vaikka kuvanprosessointi perustuu matemaattisten kaavojen käyttöön, inhimillisellä intuitiolla ja analysointikyvyllä on keskeinen rooli eri menetelmien valinnassa. Monesti on kiinnostava lopputuote, miltä kuva näyttää, kun taas toisinaan on olennaista tunnistaa kuvasta joitakin kiinnostavia kohteita. Silmäillään seuraavassa suppeasti ihmissilmän rakennetta ja myös näkökyvyn rajoituksia, jotka on otettava huomioon digitaalisten kuvien käsittelyssä. Kuva 2.1. sisältää silmän poikkileikkauksen. Silmien väli on aikuisella noin 6 cm ja silmän keskimääräinen halkaisija 20 mm. Silmä on geometrisesti lähes pallo. Digitaalisten kuvien peruskäsitteet 21


2 Kuva 2.1. Silmän osat. Digitaalisten kuvien peruskäsitteet 22
3 Cornea eli sarveiskalvo on ulommainen kalvo silmän päällä. Iiris eli mustuainen ympäröi linssiä eli mykiötä, jonka läpi valo kulkee nesteen läpi retinalle eli verkkokalvolle. Iiris laajenee päästääkseen hämärässä lisää valoa silmään ja suppenee kirkkaassa valossa. Tarkan näön alue on pinta-alaltaan pieni fovea eli verkkokalvon keskikuoppa. Katsetta siirrettäessä kohteeseen kuva muodostuu fovealle. Näkökentässä olevasta kohteesta heijastuu valoa retinalle, kun silmä on sopivasti fokusoitunut, ts. mykiö on säädetty sopivasti kohdentumaan katsottavaan kohteeseen. Mykiö absorboi noin 8 % näkyvästä valosta ja erityisesti näkyvän valon reunoilta infrapunaja ultraviolettisäteitä, jotka suuressa määrin absorboituessa voivat tämän vuoksi jopa vahingoittaa silmää Digitaalisten kuvien peruskäsitteet 23
4 Verkkokalvolla näköaistimuksen anturina ovat 6-7 miljoonaa tappisolua ja miljoonaa sauvasolua. Edelliset ovat keskittyneet foveaan ja aistivat värejä. Jälkimmäiset ovat herkkiä valolle. Silmän kuusi liikuttajalihasta pyörittävät silmämunaa siirrettäessä katsetta. Silmämuna liikkuu ikään kuin kolmen akselin, (kuviteltujen) vaaka-, pysty- ja kiertoakselinsa suunnassa. Kiertoakselin voidaan ajatella yhtyvän kuvaan 2.1. piirrettyyn optiseen näköakseliin. Päätä liikuttamatta ihmisen katselukulma on runsas ±80 (kuva 2.2.) Silmät ovat kuitenkin vain aistinelin, ja varsinainen informaation prosessointi tapahtuu aivoissa, jonne näköhermot välittävät aistitun informaation ja jossa kirjaimellisesti tehdään näkemiseen liittyvä aivotyö. Kuva 2.3. esittää, miten kuva muodostuu verkkokalvolle. Digitaalisten kuvien peruskäsitteet 24
5 Kuva 2.2. Sauva- ja tappisolujen jakauma verkkokalvolla. Digitaalisten kuvien peruskäsitteet 25
6 Kuva 2.3. Kaavakuva kuvan muodostumisesta verkkokalvolle linssin optisen keskipisteen C kautta. Kuvan korkeus on suhteessa 15/100=h/17, josta saadaan h=2.55 mm. Kun kuva on näin piskuinen, on selvää, että aistinsoluja tarvitaan suurella tiheydellä verkkokalvolla. Digitaalisten kuvien peruskäsitteet 26
7 Kun digitaaliset kuvat esitetään intensiteettitasojen diskreetteinä joukkoina, silmän kyky erottaa eri intensiteettien välillä on tärkeä ominaisuus esitettäessä kuvanprosessoinnin tuloksia. Silmä pystyy adaptoitumaan peräti luokkaa olevassa suhteessa. Kokeelliset tutkimukset ovat osoittaneet subjektiivisen kirkkauden (kuten tämä on havaittu) olevan intensiteetin logaritminen funktio. Kirkkauden havaitseminen ei kuitenkaan ole intensiteetin yksinkertainen funktio. Visuaalinen järjestelmä on taipuvainen alittamaan tai ylittämään eri intensiteettirajat. Kuva 2.4. demonstroi tätä. Nämä Machin kaistat havaitsi ensimmäisen Ernst Mach Toinen ilmiö on samanaikaiset kontrastit, kun alueen havaittu kirkkaus ei riipu suoraviivaisesti intensiteetistään, kuten kuva 2.5. osoittaa. Digitaalisten kuvien peruskäsitteet 27

8 Kuva 2.4. Vaikka kaistojen intensiteetti on kullakin vakio, havaitaan kirkkaus ikään kuin pykäläisenä rajan kohdalla. Digitaalisten kuvien peruskäsitteet 28

9 Kuva 2.5. Samanaikainen kontrasti: havaittu kirkkaus ei riipu vain intensiteetistä. Kaikilla keskineliöillä on täsmälleen sama intensiteetti, mutta ne näyttävät tummenevan taustan vaaletessa. Vastaava ilmiö nähdään katsottaessa ensin valkoista paperia pöydällä ja toiseksi nostettaessa se ylös kirkasta taivasta vasten. Digitaalisten kuvien peruskäsitteet 29
10 Muita näköhavaintojen ilmiöitä ovat optiset illuusiot, joissa nähdään olematonta informaatiota tai geometrisesti virheellisesti kohteiden ominaisuuksia. Kuva 2.6. esittää esimerkkejä. Sen vasemmassa yläosassa voidaan nähdä neliö, vaikka siinä ei ole mitään neliön ääriviivoja. Vastaavasti voidaan nähdä ympyrä kuva oikeassa yläosassa. Huomaa, miten vähäinen määrä suoria riittää antamaan illuusion niiden keskellä olevasta ympyrästä. Vasemman alaosan vaakasuorat janat ovat tarkasti yhtä pitkät, vaikka erilaiset kärkikuviot harhauttavat näyttämään ne eripituisiksi. Oikean alaosan suorat näyttävät olevan erisuuntaisia, mutta eivät todellisuudessa ole, vaan monet lyhyet samansuuntaiset poikkiviivat aiheuttavat illuusion. Digitaalisten kuvien peruskäsitteet 30
11 Kuva 2.6. Optisia illuusioita. Digitaalisten kuvien peruskäsitteet 31
12 2.2. Valo ja sähkömagneettinen spektri Isaac Newton havaitsi 1666 valkoisen valon olevan todellisuudessa yhdistelmä kaikkia mahdollisia (silmin nähtäviä) värejä kokeillessaan valon hajaantumista lasiprisman läpi. Valo muodostuu värien jatkuvasta spektristä ulottuen violetista punaiseen. Näkyvä valo edustaa ainoastaan sähkömagneettisen spektrin kapeaa kaistaa (kuva 2.7.). Kaikkiaan spektri ulottuu gammasäteistä radioaaltoihin. Nämä ilmaistaan aallonpituuden, taajuuden f ja valon nopeuden c= m/s perusteella c f (1) Energia (fotoni) tässä yhteydessä on E hf, (2) jossa h= Js on Planckin vakio. Aaltoliikettä kuvataan kuvan 2.8. tapaan. Ihmisen silmä havaitsee herkimmin oranssia (=5550 Å, 1 Å=10-10 m).. Digitaalisten kuvien peruskäsitteet 32
13 Kuva 2.7. Sähkömagneettinen spektri, josta näkyvän valon kaista on varsin kapea osa. Digitaalisten kuvien peruskäsitteet 33
14 Kuva 2.8. Aallonpituus graafisena esityksenä. Sähkömagneettisilla aalloilla on kaksinainen luonne: kuvan 2.8. kaltainen siniaaltoliike tai se voidaan ymmärtää massattomien hiukkasten aaltoliikkeenä, joka etenee valon nopeudella. Jokaisen hiukkasen energia on fotonin suuruinen. Kaavan (2) mukaan energia on suhteessa taajuuteen. Mikroaalloilla on enemmän energiaa kuin radioaalloilla ja kaikkein eniten on gammasäteilyllä, joka on täten vaarallista eläville organismeille. Digitaalisten kuvien peruskäsitteet 34
15 Ihmisen silmä kykenee aistimaan määrättyä sähkömagneettista säteilyä, valoa, jonka aallonpituus on violetin 0.43 m:stä punaisen 0.79 m:iin. Käytännöllisyyden vuoksi nämä aallonpituudet jaetaan kuuteen väriin: violetti, sininen, vihreä, keltainen, oranssi ja punainen. Niillä ei ole mitään tarkkaa rajaa, vaan pikemmin muuttuvat tasaisesti väristä toiseen. Ihmisen kohteesta näkemät värit riippuvat siitä heijastuneesta valosta. Kappale, joka heijastaa melko tasaisesti kaikilla valon aallonpituuksilla, nähdään valkoisena. Sen sijaan kappale, joka heijastaa vain joitakin värispektrin osia, nähdään vastaavissa väreissä. Esim. vihreä näkyy aallonpituuksina nm. Digitaalisten kuvien peruskäsitteet 35
16 Monokromaattisen eli yksivärisen valon ainoa ominaisuus on sen intensiteetti eli valovoima. Harmaasävy vastaa termeissämme tätä, kun ei ole värikuvista kyse. Kromaattinen eli värillinen valo käsittää joitakin osia valon spektristä. Taajuuden eli frekvenssin lisäksi sitä määritetään kolmella suureella: radianssi, luminanssi eli valovirta ja kirkkaus. Radianssi [watti, W] tarkoittaa energian määrää, joka tulee valolähteestä. Luminanssi [lumen, lm] mittaa havaitsijan havaitsemaa valolähteen energiaa. Kirkkaus on subjektiivinen suure. Digitaalisten kuvien peruskäsitteet 36
17 2.3. Kuvan hankinta Valaistus ja näkymä kolmiulotteisessa arkimaailmassamme ovat luonnollisesti ensimmäinen mieleen tuleva kuvauskohde. Digitaalinen kuvaaminen käsittää kuitenkin monia teknisiä sovellusaloja ja lääketieteellisen kuvantamisen, joista esimerkkinä on röntgenkuvat. Kuva 2.9. esittää kolme pääasiallista tapaa järjestää kuvausanturit tai -sensorit. Niihin tuleva energia muutetaan jännitteeksi sähkölähteen ja anturimateriaalin avulla. Jälkimmäinen on herkkä määrätynlaiselle energialle, jota halutaan havaita. Anturien vaste on ulostulojännitteen aaltosignaali. Tämä digitoimalla eli kvantisoimalla kustakin anturista saadaan digitaalinen kuva. Yksittäisiä antureja tarvitaan luonnollisesti suuri määrä kuvaa varten (kuva 2.9.). Digitaalisten kuvien peruskäsitteet 37

18 Kuva 2.9. Ylinnä yksittäinen anturi, keskellä anturiliuska ja alhaalla anturimatriisi. Digitaalisten kuvien peruskäsitteet 38
19 Yhdelläkin anturilla oli mahdollista saada kaksiulotteinen (2D) kuva toimittaessa kuvan järjestelyin, jolloin anturi pyyhkäisee rivin kerrallaan vaakasuuntaisena liikkeenä ja rumpu pyörii siirtäen seuraavan rivin kohdalle. Tässä filminegatiivi oli rullalla, jolle saadaan tarkka kuva kuvattavasta kohteesta, koska mekaaninen liike on tarkasti hallittavissa. Tosin menettely oli hidas. Anturiliuskaa käytetään kaksiulotteisten ja kolmiulotteisten (3D) kuvien kuvaamisessa. Kuva esittää periaatteen, jota käytetään useimmissa skannereissa eli kuvanlukijoissa ja toisena tietokonetomografiassa (CT tai CAT, computerized [axial] tomography), magneettiresonanssikuvauksessa (MRI) ja positroniemissiotomografiassa (PET). Tietokonetomografiassa röntgensäde kulkee läpi kohteen ja tulos rekisteröidään renkaassa olevassa anturiliuskassa, joka liikkuu lineaarisesti. Täten saadaan kerroskuvaus aikaiseksi kolmiulotteisena tilavuuskuvana. Digitaalisten kuvien peruskäsitteet 39

20 Kuva Yhdellä anturilla saadaan kaksiulotteinen kuva filmille. Digitaalisten kuvien peruskäsitteet 40

21 Kuva Kaksi- ja kolmiulotteisen pyyhkäisykuvan luonti. Digitaalisten kuvien peruskäsitteet 41
22 Kuvan 2.9. anturimatriisia sovelletaan lukuisissa sähkömagneettisissa, joissakin ultraäänilaitteissa ja erityisesti digitaalisissa kameroissa. Kameroiden CCD-kennot (charge-coupled device) voidaan valmistaa tiiviissä muodossa, esim elementtiä tai runsaasti enemmän. Matriisijärjestelyn etu liuskaan verrattuna on, ettei tarvita mekaanista liikettä. Tällöin voidaan käyttää pitkää valotusaikaa eli kerätä valoa säteilevän kohteen energiaa suhteellisen pitkään, mikä on tarpeen varsinkin tähtitieteellisissä kuvauksissa. CMOS (Complementary Metal Oxide Semiconductor) on kuitenkin nykyään yleisin kennotyyppi. Kuva havainnollistaa kuvausmenettelyn. Digitaalikamera tai kuvauslaite yleensä rekisteröi valoa tai säteilyä heijastavan näkymän CCD-kennolleen. Jos kyseessä on valoa, järjestelmässä on optinen linssi, joka kerää sitä. Digitaali- ja analogiapiirit pyyhkäisevät kennolta tuloksen, joka digitoidaan kuvauslaitteessa. Digitaalisten kuvien peruskäsitteet 42
 energia- (valaistus) lähde, (b) näkymäalkio, (c) kuvauslaite ja järjestelmä,")
23 Kuva Kuvanhankintaprosessi: (a) energia- (valaistus) lähde, (b) näkymäalkio, (c) kuvauslaite ja järjestelmä, (d) näkymän projektio kuvatasolle ja (e) digitoitu kuva. Digitaalisten kuvien peruskäsitteet 43
24 Aluksi määriteltiin (kaksiulotteisen) kuvan olevan kaksiulotteinen funktio f(x,y). Amplitudi- eli funktion f arvo tasokoordinaateille (x,y) on positiivinen skalaarisuure, jonka fysikaalisen merkityksen määrää kuvalähde. Kun kuva luodaan fysikaalisella prosessilla, intensiteettiarvot ovat suhteessa säteilyenergiaan, esim. sähkömagneettiset aallot. Näin ollen arvon f(x,y) on oltava einegatiivinen ja äärellinen, ts. 0 f ( x, y). Funktio f(x,y) voidaan jakaa kahteen osaan, (1) valaistuslähteen valo, joka osuu kuvattavaan näkymään (kohteisiin), ja (2) tästä heijastuva valo. Nämä ovat valaistus i(x,y) ja heijastuvuus r(x,y). Digitaalisten kuvien peruskäsitteet 44
25 Tällöin on f ( x, y) i( x, y) r( x, y), jossa 0 i( x, y) ja 0 r( x, y) 1. Heijastuvuus rajoittuu täydellisen absorboinnin 0 ja heijastuksen 1 väliin. Valaistus riippuu valaistuslähteestä ja heijastuvuus kuvattavasta kohteesta. Nämä soveltuvat niin ikään läpivalaisuun, kuten röntgensäteet, vaikka silloin ei voi puhua heijastumisesta. Kirkkaalla säällä aurinko säteilee määrällä lm/m 2 ja pilvisellä lm/m 2. Tyypillisiä heijastuvuusarvoja ovat 0.01 mustalla sametilla, 0.65 ruostumattomalla teräksellä ja 0.80 tasaisella valkoisella tapetilla ja 0.93 puhtaalla lumella. Digitaalisten kuvien peruskäsitteet 45
26 2.4. Kuvan näytteistys ja kvantisointi Näytteistyksen ja kvantisoinnin idea esitetään kuvassa Vasen yläosa esittää jatkuvan kuvan f, joka halutaan muuntaa digitaaliseen muotoon. Kuva voi olla jatkuva x- ja y-koordinaattien ja myös amplitudin suhteen. Digitalisointia varten jatkuva funktio on näytteistettävä kummankin koordinaatin ja amplitudin suhteen. Koordinaattien digitointi on näytteistämistä (sampling) ja amplitudin kvantisointia (quantisation). Kuvan oikean yläosan yksiulotteinen funktio vastaa jatkuvan kuvan amplitudiarvoja (intensiteetti) kuljettaessa janaa AB pitkin. Mukana oleva satunnaisvaihtelu on kohinaa eli häiriötä. Näytteet otetaan määrävälein janalta AB kuvan vasemman alaosan mukaan. Näytteet on esitetty pieninä neliöinä signaalin verhona. Näiden intervallikohdat vastaavat koordinaatteja eli näytteistyspisteitä janalla AB. Lopuksi pitää mitatut jatkuvat arvot diskretisoida eli kvantisoida, so. muuttaa jatkuvat intensiteetit diskreeteiksi, tässä tapauksessa vain kahdeksalle kvantisointitasolle (kuvan oikea alaosa). Näiden määrä muodostaa kuvan amplituditarkkuuden. Digitaalisten kuvien peruskäsitteet 46
27 a b c d Kuva Digitaalisen kuvan generointi: (a) jatkuva kuva, (b) selausjana AB, jolla suoritetaan yhden raidan (c) näytteistys ja (d) saatujen amplitudiarvojen kvantisointi. Digitaalisten kuvien peruskäsitteet 47
28 Kuva esittää koko kuvallista tietoa. Kuvan laatu, joka tässä on havainnollistuksen vuoksi sangen harva, määräytyy olennaisin osin käytettyjen näytteiden ja intensiteettitasojen määrän, ts. tarkkuuden eli resoluution mukaan. Merkitään näytteistettyä ja kvantisoitua kuvaa f(x,y), jossa x=0,,m- 1 ja y=0,,n-1. Kuvassa on kolme vaihtoehtoa esittää f(x,y). Kuvan yläosassa on kolmiulotteinen (todellisuudessa sen projektio) vaihtoehto, alhaalla vasemmalla miltä se katsojasta näyttäisi (mahdollisesti ilman värejä) ja oikealla alhaalla numeerinen esitys. Digitaalisten kuvien peruskäsitteet 48
 Jatkuva kuva projisoituna matriisille sekä (b) näytteistyksen ja")
29 Kuva (a) Jatkuva kuva projisoituna matriisille sekä (b) näytteistyksen ja kvantisoinnin tulos. Digitaalisten kuvien peruskäsitteet 49
 Kuvan pintakuvaus, (b) kuva visuaalisena ja (c) kvantisoituina")
30 a b c Kuva (a) Kuvan pintakuvaus, (b) kuva visuaalisena ja (c) kvantisoituina lukuarvoina. Digitaalisten kuvien peruskäsitteet 50
31 Kuvan 2.15 vasen alaosa on luonnollisesti visuaalisesti kiinnostava versio ja mitä näytöllä näytetään, mutta kaksi muuta kertovat, mitä se datana sisältää. Tässä oli vain kolme kvantisointiarvoa käytössä vastaten harmaasävyjä: musta, harmaa ja valkoinen. Jos kuvassa on alkiota, pikseliä, se sisältää kaikkiaan 16 miljoonaa kvantisoitua arvoa. Kuvan oikeassa alalaidassa nähdään kirjoitetun vain osa kaikista luvuista. Ideana on, paitsi havainnollistavuus, myös tuoda mieleen, että kuvien algoritmisessa käsittelyssä pyritään samalla tavalla eliminoimaan osa datasta prosessin nopeuttamiseksi ja ylipäänsä enemmän tai vähemmän turhana laskentana. Digitaalisten kuvien peruskäsitteet 51
32 Kuva f(x,y) ymmärretään nyt pikselimatriisina, esim. esityksenä (indeksit voisivat olla myös alaindekseinä). f ( x, y) f f (0,0) f (1,0) : ( M 1,0) f f (0,1) f (1,1) : ( M 1,1) :... f f (0, N 1) f (1, N 1) : ( M 1, N 1) Ajateltaessa tätä kuvana huomataan origon olevan vasemmassa yläkulmassa ja akselien kulkevan vasemmalta oikealle ja alas. Monet näytöt, esim. TV, pyyhkäisevät raita kerrallaan alkaen vasemmalta ylhäältä. Kyseessä on oikeakätinen karteesinen koordinaatisto. Digitaalisten kuvien peruskäsitteet 52
33 Kuvan digitointia varten on päätettävä määrät M ja N sekä kvantisointieli intensiteettitasojen lukumäärä L. Muistin käytön kannalta on tavallisesti mielekästä määrittää L 2:n potensseina, ts. L 2 k. Oletetaan diskreettien tasojen olevan tasavälisiä ja kokonaislukuja lukuväliltä [0,L-1]. Tätä kutsutaan mitattavan suureen, tässä intensiteetti, dynaamiseksi alueeksi. Maksimi eli yläraja voidaan ymmärtää kyllästymispisteenä ja alaraja (kvantisointi)kohinan rajana (kuva 2.16). Kontrasti määritellään kuvassa esiintyvän suurimman ja pienimmän intensiteettiarvon erotuksena. Jos dynaaminen alue on laaja, kuvassa voi olla suuria kontrasteja. Jos se on pieni, tuloksena on haalea kuva. Digitaalisten kuvien peruskäsitteet 53
 pieniamplitudista satunnaisilmiötä, joka sotkee kuvaa varsinkin dynaamisen alueen alarajalla, ts. maskaa tätä.")
34 kyllästyminen kohinaa Kuva Kyllästyminen (saturaatio) tarkoittaa, että dynaamisen alueen yläraja on ylitetty, jolloin kaikki sen yläpuolelle menneet arvot leikkautuvat tähän maksimiin, ts. saavat kaikki saman maksimiarvon. Kohina on (yleensä) pieniamplitudista satunnaisilmiötä, joka sotkee kuvaa varsinkin dynaamisen alueen alarajalla, ts. maskaa tätä. Kohina muodostaa tässä rakeisia tekstuureita, erikoisesti tummissa kohdissa Digitaalisten kuvien peruskäsitteet 54
35 Eo. merkinnöin saadaan b, kuvan tallentamiseen tarvittava bittien lukumäärä b M N k. Kun on M=N, edellinen on yhtä kuin b N 2 k. Taulukko 2.1. antaa kuvien koot bitteinä eri N:n, k:n ja L:n arvoilla. Tavun ollessa 8 bittiä kuvien vaatimat muistitilamäärät kasvavat nopeasti näiden ollessa suurempia kuin pikseliä. Digitaalisten kuvien peruskäsitteet 55

36 Taulukko 2.1. Digitaalisten kuvien peruskäsitteet 56
37 Spatiaalinen eli tilaa koskevaa resoluutio on kuvan pienimmän erotettavissa olevan yksityiskohdan yksikkö. Spatiaalinen resoluutio esitetään yleensä suureena pistettä tai pikseliä mittayksikköä kohti (dots per inch, dpi), jossa käytetään USA:n tapaan tuumaa. Esim. sanomalehdet on painettu resoluutiolla 75 dpi, aikakauslehdet 133 dpi ja korkealaatuiset kirjat 2400 dpi. Olennaista on suhteuttaa spatiaalinen resoluutio käytettävien (absoluuttisten) mittayksiköiden kanssa. Sanottaessa kuvan resoluution olevan pikseliä tämä ei vielä kerro kaikkea, jos ei tiedetä spatiaalista resoluutiota. Pikselimäärillä voidaan vain karkeasti verrata eri laitteiden tarkkuutta, kuten kameroissa, joissa nämä ovat 20 megapikseliä tai 8 megapikseliä olettaen samalla näissä olevan samanlainen linssi ja kuvan otettavan samalta etäisyydeltä. Digitaalisten kuvien peruskäsitteet 57
38 Intensiteettiresoluutio viittaa vastaavasti intensiteettitasojen pienimpään eroon. Tämä on yleensä 2:n potenssi tullen muistiin tallentamisen kannalta sopivista bittien lukumääristä. Tavallisin on 8 bittiä (1 tavu), joskus 16 bittiä tai jopa 32 bittiä. Harvinaisina myös 10 ja 12 bittiä on käytetty. Tällöin 8 bittiä vastaa luonnollisesti 2 8 =256 tasoa. Kun kuvan kohina ja kyllästyminen vaikuttavat merkittävästi kuvan laatuun, resoluutio on tässäkin ainoastaan lähtökohta lopputuloksen kannalta. Kuva esittää spatiaalisen resoluution vähentämisen vaikutuksia. Alkuperäistä alempi resoluutio antaa luonnollisesti pienempiä kuvia, esim. kuvan 72 dpi koko Vertailun vuoksi pienemmät kuvat on suurennettu alkuperäisen kokoiseksi. Digitaalisten kuvien peruskäsitteet 58


39 Kuva Spatiaalisen resoluution vähentämisen vaikutuksia: (a) 1250 dpi, (b) 300 dpi, (c) 150 dpi ja (d) 72 dpi. 300 dpi on melko hyvä, ja se onkin alin kirjojen kuvissa käytetty. Tapauksessa 150 dpi kaarevat reunat ja mm. kronometrin oikeanpuoleisen pienen kellotaulun viisari ovat huonoja. 72 dpi on varsin kehno. Tällaisia puutteita on kuitenkin mahdollista tempuilla korjata esim. lokaalisti vaihtelemalla pikselin kokoa. Digitaalisten kuvien peruskäsitteet 59
40 Tarkastellaan seuraavaksi intensiteetin vähentämisen vaikutuksia. Kuvassa on vähennetty intensiteettiä arvosta 256 (k=8) arvoon 2 eli mustavalkokuvaan. Alkuperäinen on CT-kuvan kaksiulotteinen projektiokuva kokoa , jossa on 256 intensiteettitasoa. Kuvasarjassa vähennettiin arvoa k=8 arvoon 1. Sen sijaan pikselimäärä pidettiin muuttumattomana. Intensiteetit 256, 128 ja 64 ovat visuaalisesti samanlaisia. Tapauksesta 32 voi jo havaita hyvin vähäisiä harjannemaisia rakenteita kohdissa, joissa on vakio- tai lähes vakiointensiteettiä (tässä kuvan skannauksen takia kuva ei ole aivan aito, esim. rakeisuus on tullut skannauksesta). Näitä kutsutaan vääriksi ääriviivoiksi. Ilmiö esiintyy selvästi edelleen alemmissa intensiteeteissä. Tässä yhteydessä 64 olisi ollut riittävä intensiteettitasojen määrä. Digitaalisten kuvien peruskäsitteet 60
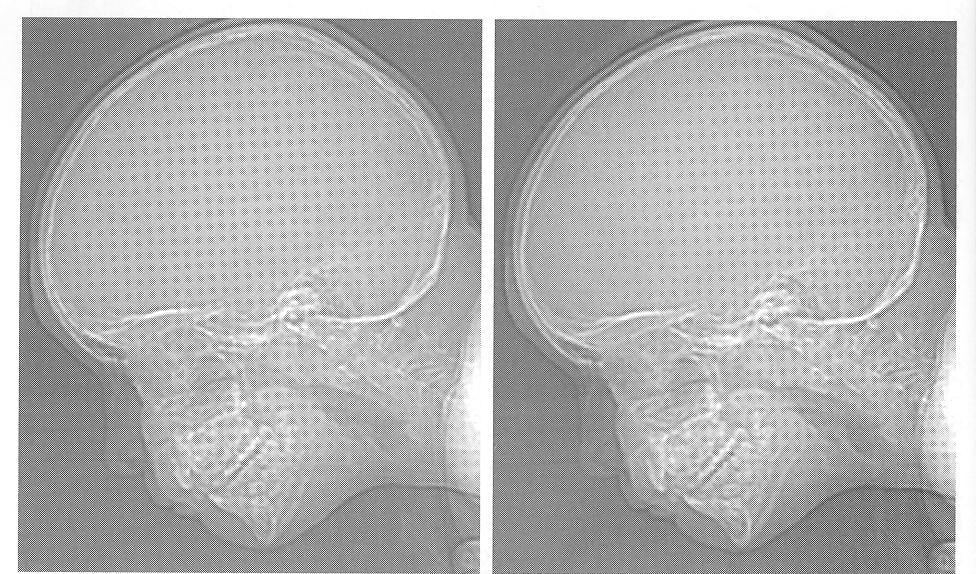
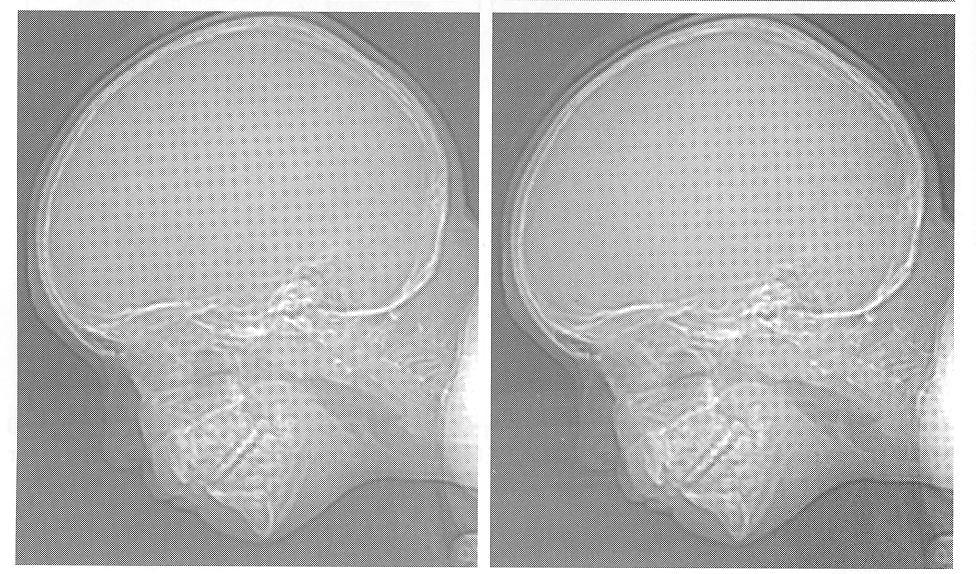
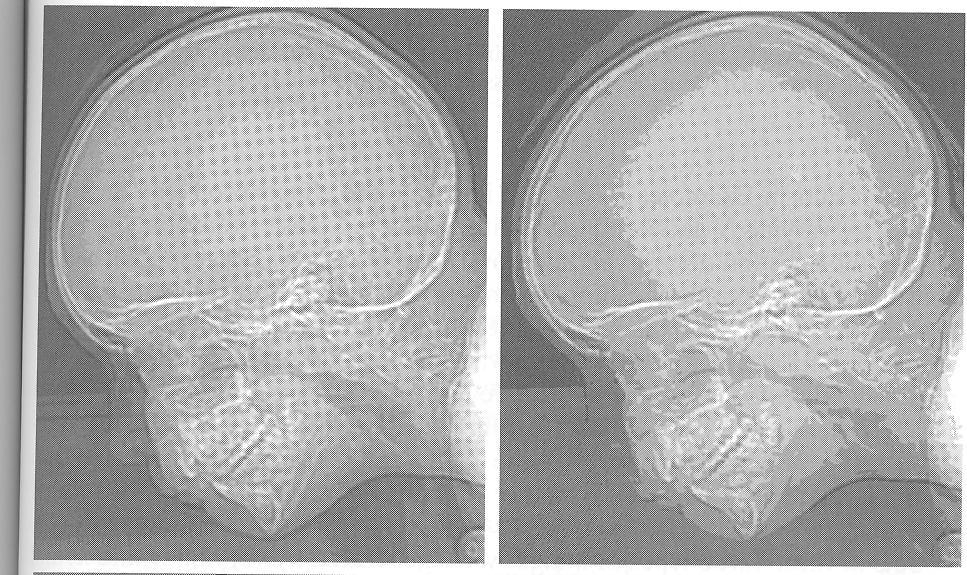
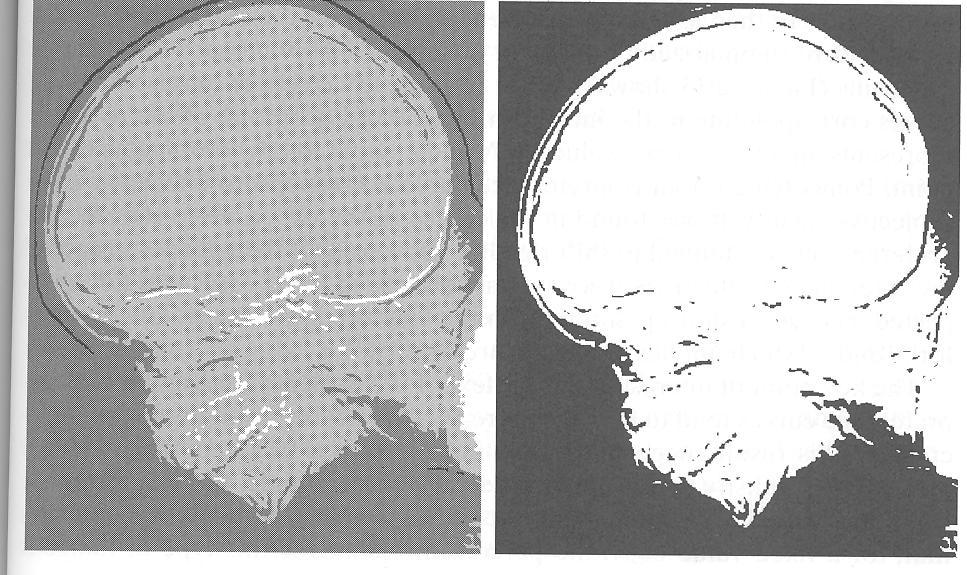
41 ab cd gh Kuva Intensiteettitasojen määrä: (a) 256, (b) 128, (c) 64, (d) 32, (e) 16, (f) 8, (g) 4 ja (h) 2. ef Digitaalisten kuvien peruskäsitteet 61
42 Edellä pohdittiin suureiden N ja k vaikutusta erikseen. Todellisuudessa näillä on yhteisvaikutus, jota on kuitenkin vaikeaa mitata. Erilaisia subjektiivisia (katsojan) arviointeja on tehty vaihteleville kuville, kuten muutenkin kuvankäsittelytutkimuksessa runsaasti käytetyille testikuville, jotka esitetään kuvassa Nähdään, miten kuvan sisällöllä on tietysti merkitystä. Esim. kuvassa, jossa on vähän yksityiskohtia ja reunoja sekä paljon tasaista yhtenäistä pintaa, pärjätään ehkä vaatimattomillakin resoluutiolla. Toisaalta paljon yksityiskohtia sisältävä kuva on vaativa. Digitaalisten kuvien peruskäsitteet 62
 Lena, vähän yksityiskohtia,")


43 (a) (b) (c) Kuva (a) Lena, vähän yksityiskohtia, (b) cameraman, keskimääräinen kuva yksityiskohtiensa lukumäärän suhteen ja (c) paljon yksityiskohtia [MIT]. Digitaalisten kuvien peruskäsitteet 63
44 Kuvan interpolointi on tärkeä perusmenetelmä, jota käytetään mm. kuvan zoomauksessa, kutistamisessa, rotaatiossa ja geometrisissä korjauksissa. Se on pohjimmiltaan uudelleennäytteistysmenetelmä (resampling). Interpoloinnissa käytetään tunnettuja arvoja tai pisteitä tuottamaan arvoja tuntemattomissa paikoissa, niiden välissä. Esim. kun alkuperäinen kuva on kokoa ja halutaan zoomata se kokoon , luodaan aluksi ristikko kokoa , joka kutistetaan samaan pinta-alaan kuin alkuperäinen. Nyt kukin pikseli peittää luonnollisesti pienemmän osan kuin alkuperäisessä. Uusien pikselien intensiteettiarvot saadaan vertaamalla niitä alkuperäisiin pikseleihin. Kopioidaan lähimmästä alkuperäisestä intensiteetti kuhunkin uuteen pikseliin. Lopuksi suurennetaan kuva zoomattuun kokoonsa. Kyseessä on lähimmän naapurin interpolointi. Digitaalisten kuvien peruskäsitteet 64
45 Lähimmän naapurin interpolointi on yksinkertainen toteuttaa, mutta se on taipuvainen tuottamaan artefaktoja, kuten suorien vääristymiä. Näin ollen käytännössä sovelletaan muita, esim. bilineaaria interpolointia, jossa estimoidaan neljän lähimmän naapurin intensiteettiarvolla annetun paikan (x,y) intensiteetti. Se voidaan ajatella esim. ristikon koordinaatteina. Olkoon v(x,y) sen intensiteettiarvo. Tämä saadaan kaavalla (3) v( x, y) ax by cxy d, jossa neljä kerrointa lasketaan tuntemattomina neljän lähimmän naapurin antamasta neljästä yhtälöstä tunnettaessa näiden intensiteetit. (Vakiintuneen nimen osa bilineaari on kehnosti valittu, kun kaavassa on mukana myös muuttujien x ja y sekatermi, so. matemaattisesti epälineaari termi.) Digitaalisten kuvien peruskäsitteet 65
46 Vaikeustasoltaan seuraava menetelmä on kaksoiskuutiollinen interpolointi (bicubic interpolation). Tässä on mukana 16 lähintä naapuripistettä. Pisteen (x,y) intensiteettiarvo lasketaan kaavalla v( x, y) 3 i0 3 j0 a ij x i y j, (4) jossa 16 kerrointa määrätään tuntemattomina 16 naapurin avulla. Edeltävän kaavan (3) termit ovat osa (4):stä, joka kerää näin informaatiota laajemmalta alueelta ja säilyttää monesti edellistä paremmin yksityiskohdat. Kaavaa (4) käytetään Adobe Photoshopissa ja Corel Photopaintissa. Digitaalisten kuvien peruskäsitteet 66
47 Palataan kuvan 2.17 esimerkkiin, jonka osan (d) luomiseksi, sekä kutistus että zoomaus, oli käytetty lähimmän naapurin interpolointia. Tämä on nyt myös kuvassa 2.20, osana (a), joka on kehno. Kuvan osat (b) ja (c) on saatu käyttäen bilineaaria ja kaksoiskuutiollista interpolointia, jolloin parannus on huomattava. Jälkimmäinen on lisäksi edellistä hiukan terävämpi. Kuvan osa (d) on sama kuin kuvan 2.17 (c), jolle on tehty vastaavasti interpoloinnit kuin yllä kuvan osissa (e) ja (f). Huolimatta resoluution vähenemisestä alkuperäisestä 1250 niinkin alas kuin 150 osien (e) ja (f) kuvat ovat melko hyviä, mikä osoittaa interpoloinnin tehokkuutta, varsinkin kaavalla (4). Näitä monimutkaisempia menetelmiä ovat splinejä tai aallokkeita hyödyntävät, joita sovelletaan kuitenkin vain erikoistapauksissa, mm. joskus lääketieteellisten kuvien yhteydessä. Digitaalisten kuvien peruskäsitteet 67
 Kuva on supistettu tarkkuuteen 72 dpi ja zoomattu takaisin alkuperäiseen kokoonsa soveltaen")
 kuten edellinen, mutta kaksoiskuutiollisen interpoloinnin avulla.")
48 Kuva (a) Kuva on supistettu tarkkuuteen 72 dpi ja zoomattu takaisin alkuperäiseen kokoonsa soveltaen lähimmän naapurin interpolointia, (b) kuva kutistettuna ja zoomattuna soveltaen bilineearia interpolointia, (c) kuten edellinen, mutta kaksoiskuutiollisen interpoloinnin avulla. (d)- (f) Edellisiä vastaava kuvajono, mutta alussa oli supistettu tarkkuuteen 150 dpi. Digitaalisten kuvien peruskäsitteet 68
49 2.5. Pikselien välisiä suhteita Kuvataan kuvaa jälleen funktiona f(x,y). Pikselillä p koordinaateilla (x,y) on neljä horisontaalista ja vertikaalista naapuria, joiden koordinaatit ovat seuraavat ( x 1, y),( x 1, y),( x, y 1),( x, y 1). Tätä pikselijoukkoa kutsutaan pikselin p 4-naapureiksi, N 4 (p). Jokainen näistä neljästä on yksikön päässä p:stä, mutta reunalla niitä voi mennä jo kuvan ulkopuolelle. Pikselin neljä diagonaalista naapuria, N D (p), ovat seuraavat. ( x 1, y 1),( x 1, y 1),( x 1, y 1),( x 1, y 1). Nämä kaikki yhdessä muodostavat p:n 8-naapurit, N 8 (p), joista jotkut voivat olla kuvan reunalla. Digitaalisten kuvien peruskäsitteet 69
50 Olkoon V intensiteettiarvojen joukko, jota käytetään määrittelemään vierekkäisyyttä. Esim. harmaasävyillä {0,1,,255} V on jokin osajoukko näistä ja binäärillä V={1}. Tarkastellaan kolmea eri vierekkäisyyttä: (1) 4-vierekkäisyys: Pikselit p ja q ovat 4-vierekkäisiä, jos niiden intensiteetit kuuluvat osajoukkoon V ja q on N 4 (p):ssä. (2) 8-vierekkäisyys: Pikselit p ja q ovat 8-vierekkäisiä, jos niiden intensiteetit kuuluvat osajoukkoon V ja q on N 8 (p):ssä. (3) sekavierekkäisyys: Pikselit p ja q ovat sekavierekkäisiä, jos niiden intensiteetit kuuluvat osajoukkoon V ja joko (i) q on N 4 (p):ssä tai (ii) q on N D (p):ssä ja joukolla N 4 (p N 4 (q) ei ole yhtään pikseliä, jonka arvo olisi osajoukossa V. Sekavierekkäisyys on muunnos 8-vierekkäisyydestä. Sen tarkoitus on hävittää ei-yksikäsitteiset tilanteet, joita 8-vierekkäisyys saattaa aiheuttaa. Tästä on esimerkkinä kuva Digitaalisten kuvien peruskäsitteet 70
51 Kuva (a) Pikselijärjestys, (b) pikselit, jotka ovat 8-vierekkäisiä (merkitty katkoviivoilla; huomaa ei-yksikäsitteisyys), (c) sekavierekkäiset, (d) kaksi 1-aluetta, jotka ovat 8-vierekkäisiä, (e) ympyröity piste on osa 1-arvoisten pikselien rajaa vain, jos 8- vierekkäisyyttä käytetään 1-alueen ja taustan välillä ja (f) 1-arvoisten alueen sisäraja ei muodosta suljettua polkua, kuten ulkoraja tekee. Digitaalisten kuvien peruskäsitteet 71
52 Polku koordinaattien (x,y) pikselistä p koordinaattien (s,t) pikseliin q on pikselien jono (x 0,y 0 ), (x 1,y 1 ),,(x n,y n ), jossa (x 0,y 0 )= (x,y), (x n,y n )=(s,t) sekä pikselit (x i,y i ) ja (x i-1,y i-1 ) ovat vierekkäisiä, kun 1in. Tällöin n on polun pituus. Jos (x 0,y 0 )= (x n,y n ), se on suljettu polku. Voidaan määritellä 4-, 8- tai sekapolku riippuen vierekkäisyyden tyypistä. Olkoon S kuvan pikselien osajoukko. Pikselit p ja q ovat yhdistettyjä, jos S:ssä on polku niiden välillä. Jokaiselle pikselille p joukossa S niiden pikselien joukkoa, jotka on yhdistetty siihen S:ssä, kutsutaan yhdistetyksi komponentiksi. Jos S:ssä on vain yksi sellainen, kyseessä on yhdistetty joukko. Digitaalisten kuvien peruskäsitteet 72
53 Olkoon R kuvan pikselin osajoukko. R on alue, jos se on yhdistetty joukko. Kahta aluetta R i ja R j sanotaan vierekkäisiksi, jos niiden unioni muodostaa yhdistetyn joukon. Alueet, jotka eivät ole vierekkäisiä, ovat erillisiä. Olkoot R k, k=1,2,,k, erillisiä alueita, joista mikään ei kosketa kuvan rajaa (yleisyyttä rikkomatta näin voidaan tehdä, sillä tarvittaessa voitaisiin asettaa yhden pikselin vahvuinen vaippa reunustamaan kuvaa). Olkoon R u näiden alueiden unioni ja (R u ) c tämän komplementti. Tällöin R u on kuvan edusta ja (R u ) c tausta. Raja tai ääriviiva muodostuu alueen niistä pisteistä, jotka ovat vierekkäisiä komplementtialueen pisteiden kanssa. Tällöin pitää jälleen määrätä sovellettava yhdistävyys eo. vierekkäisyyskäsitteiden avulla. Käytetään yleensä 8-yhdistävyyttä. Digitaalisten kuvien peruskäsitteet 73
54 Sisäraja ja ulkoraja mainittiin jo kuvan yhteydessä. Ulkoraja erottaa sisärajan taustasta. Erolla on merkitys rajaa seuraavien algoritmien käytössä. Tavallisesti käytetään ulkorajaa, jotta saadaan suljettu polku. Jos alue R sattuu olemaan yhtä kuin koko kuva (pikselijoukon nelikulmio), sen raja määritetään kuvan vasemman- ja oikeanpuolisen sarakkeen sekä ylimmän ja alimman rivin mukaan. Normaalisti rajalla olevat pikselit luetaan kuvaan mukaan. Raja muodostaa suljetun polun ollen globaali luonteeltaan. Sitä vastoin reuna (edge) on lokaali käsite vastaten intensiteettiarvojen mitan epäjatkuvuuskohtaa. Tässä pikselien derivaatta-arvot ylittävät jonkin kynnysarvon. Reunapisteitä voidaan yhdistää reunasegmenteiksi, jotka joskus saattavat vastata rajaa. Binäärikuvien kohdalla poikkeuksellisesti reunat vastaavat rajoja. Riippuen yhdistettävyyden tyypistä ja reunaoperaattoreista binäärialueesta irrotettu raja voi olla sama kuin alueen raja. Digitaalisten kuvien peruskäsitteet 74
55 D on etäisyysfunktio tai metriikka koordinaattien (x,y), (s,t) ja (v,w) pikseleille p, q ja z täyttäessään seuraavat ehdot. (1) D(p,q0 ja erityisesti D(p,q)=0, jos ja vain jos p=q (refleksisiivisyys) (2) D(p,q)= D(q,p) (symmetria) (3) D(p,z D(p,q)+ D(q,z) (kolmioepäyhtälö) Euklidinen etäisyys määritellään pikselien välillä seuraavasti. D e 1 2 xs y 2 2 ( p, q) t Tällöin pikselit, joiden etäisyys keskipisteestä (x,y) on enintään annettu r, kuuluvat r-säteiseen ympyrään tai (ympyrä)levyyn. Digitaalisten kuvien peruskäsitteet 75
56 D 4 -etäisyys (Manhattan- tai korttelietäisyys) määritellään pikselien p ja q välillä. D 4 ( p, q) x s y t Tällöin pikselit, jotka ovat enintään jollakin D 4 -etäisyydellä r keskipisteestä (x,y), muodostavat vinoneliön Pikselit, joilla D 4 =1, ovat pikselin (x,y) 4-naapureita. 2 Digitaalisten kuvien peruskäsitteet 76
57 D 8 -etäisyys (šakkilauta-etäisyys) pikselien p ja q välillä määritellään seuraavalla kaavalla. D8 ( p, q) max( x s, y t Tässä etäisyyden r keskipisteestä (x,y) määräämän alueen pikselit muodostavat neliön. Esim. pikselit D 8 -etäisyydellä2 keskipisteestä muodostavat oheiset rajat Pikselit etäisyydellä D 8 =1 ovat keskipisteen 8-naapureita. Sovellettaessa sekavierekkäisyyttä kahden vierekkäisen pikselin etäisyys riippuu pikselien arvosta polulla ja näiden naapurien arvosta, jolloin tilanne voi vaihdella sen suhteen, mitkä pikselit tulevat mukaan. ) Digitaalisten kuvien peruskäsitteet 77
58 2.6. Kuvanprosessoinnin matemaattiset perusvälineet Taulukko-operaatio toteutetaan pikseleittäin. Selvyyden vuoksi tässä käytetään sanaa taulukko matriisin sijasta. Esim. taulukoille a a näiden tulo on nyt a a a a 12 a a ja b b b b b b b b a a b b a a b b Digitaalisten kuvien peruskäsitteet 78
59 Toisaalta matriisitulo on a a a a b b b b a a b b a a b b a a b b a a b b Luentoesityksessä oletetaan käytettävän kautta linjan taulukkooperaatioita, ellei toisin mainita. Esim. korotettaessa taulukko neliöön se tehdään tavallisesti alkioittain nämä neliöimällä. Digitaalisten kuvien peruskäsitteet 79
60 Lineaaristen ja epälineaaristen menetelmien ero on olennainen. Olkoon H jokin kuvalle f(x,y) soveltuva operaattori, joka tuottaa tuloksen g(x,y) H H on lineaarinen, jos f x, y gx, y. ( x, y) a f ( x, y) ah f ( x, y) a H f ( x, y) Ha f i i ag x, ya g x, y, jossa a i, a j, f i (x,y) ja f j (x,y) ovat mielivaltaisesti valittuja vakioita ja (samankokoisia) kuvia. Kaavan ensimmäinen rivi määrittelee ominaisuuden nimeltä additiivisyys ja toinen homogeenisyys. Lineaarisuus määritellään tietysti vastaavasti summana, kun termejä on enemmän kuin kaksi. j j i i Digitaalisten kuvien peruskäsitteet 80 i i j j j j
2. Digitaalisten kuvien peruskäsitteet 2.1. Visuaalinen havaitseminen
 2. Digitaalisten kuvien peruskäsitteet 2.1. Visuaalinen havaitseminen Tässä luvussa käsitellään digitaalisten kuvien perusasioista, aina kuvien näkemisestä pikseleihin ja tarvittaviin laskentamenetelmiin
2. Digitaalisten kuvien peruskäsitteet 2.1. Visuaalinen havaitseminen Tässä luvussa käsitellään digitaalisten kuvien perusasioista, aina kuvien näkemisestä pikseleihin ja tarvittaviin laskentamenetelmiin
Valon havaitseminen. Näkövirheet ja silmän sairaudet. Silmä Näkö ja optiikka. Taittuminen. Valo. Heijastuminen
 Näkö Valon havaitseminen Silmä Näkö ja optiikka Näkövirheet ja silmän sairaudet Valo Taittuminen Heijastuminen Silmä Mitä silmän osia tunnistat? Värikalvo? Pupilli? Sarveiskalvo? Kovakalvo? Suonikalvo?
Näkö Valon havaitseminen Silmä Näkö ja optiikka Näkövirheet ja silmän sairaudet Valo Taittuminen Heijastuminen Silmä Mitä silmän osia tunnistat? Värikalvo? Pupilli? Sarveiskalvo? Kovakalvo? Suonikalvo?
10.2. Säteenjäljitys ja radiositeettialgoritmi. Säteenjäljitys
 10.2. Säteenjäljitys ja radiositeettialgoritmi Säteenjäljitys Säteenjäljityksessä (T. Whitted 1980) valonsäteiden kulkema reitti etsitään käänteisessä järjestyksessä katsojan silmästä takaisin kuvaan valolähteeseen
10.2. Säteenjäljitys ja radiositeettialgoritmi Säteenjäljitys Säteenjäljityksessä (T. Whitted 1980) valonsäteiden kulkema reitti etsitään käänteisessä järjestyksessä katsojan silmästä takaisin kuvaan valolähteeseen
10. Esitys ja kuvaus
 10. Esitys ja kuvaus Kun kuva on ensin segmentoitu alueisiin edellisen luvun menetelmin, segmentoidut pikselit kootaan esittämään ja kuvaamaan kohteita muodossa, joka sopii hyvin jatkokäsittelyä varten.
10. Esitys ja kuvaus Kun kuva on ensin segmentoitu alueisiin edellisen luvun menetelmin, segmentoidut pikselit kootaan esittämään ja kuvaamaan kohteita muodossa, joka sopii hyvin jatkokäsittelyä varten.
Yhtälön oikealla puolella on säteen neliö, joten r. = 5 eli r = ± 5. Koska säde on positiivinen, niin r = 5.
 Tekijä Pitkä matematiikka 5 7..017 31 Kirjoitetaan yhtälö keskipistemuotoon ( x x ) + ( y y ) = r. 0 0 a) ( x 4) + ( y 1) = 49 Yhtälön vasemmalta puolelta nähdään, että x 0 = 4 ja y 0 = 1, joten ympyrän
Tekijä Pitkä matematiikka 5 7..017 31 Kirjoitetaan yhtälö keskipistemuotoon ( x x ) + ( y y ) = r. 0 0 a) ( x 4) + ( y 1) = 49 Yhtälön vasemmalta puolelta nähdään, että x 0 = 4 ja y 0 = 1, joten ympyrän
1. Johdanto. Johdanto 1
 1. Johdanto Kuvanprosessointi tai -käsittely juontaa juurensa kahdesta pääasiallisesta alueesta, jotka ovat kuvainformaation parantaminen ihmisen tulkintaa varten ja kuvadatan käsittely talletusta, siirtoa
1. Johdanto Kuvanprosessointi tai -käsittely juontaa juurensa kahdesta pääasiallisesta alueesta, jotka ovat kuvainformaation parantaminen ihmisen tulkintaa varten ja kuvadatan käsittely talletusta, siirtoa
Ratkaisu: Maksimivalovoiman lauseke koostuu heijastimen maksimivalovoimasta ja valonlähteestä suoraan (ilman heijastumista) tulevasta valovoimasta:
 tulevasta valovoimasta:") LASKUHARJOITUS 1 VALAISIMIEN OPTIIKKA Tehtävä 1 Pistemäinen valonlähde (Φ = 1000 lm, valokappaleen luminanssi L = 2500 kcd/m 2 ) sijoitetaan 15 cm suuruisen pyörähdysparaboloidin muotoisen peiliheijastimen
LASKUHARJOITUS 1 VALAISIMIEN OPTIIKKA Tehtävä 1 Pistemäinen valonlähde (Φ = 1000 lm, valokappaleen luminanssi L = 2500 kcd/m 2 ) sijoitetaan 15 cm suuruisen pyörähdysparaboloidin muotoisen peiliheijastimen
1. Johdanto. Johdanto 1. Johdanto 2. Johdanto 3. Johdanto 4
 1. Johdanto Kuvanprosessointi tai käsittely juontaa juurensa kahdesta pääasiallisesta alueesta, jotka ovat kuvainformaation parantaminen ihmisen tulkintaa varten ja kuvadatan käsittely talletusta, siirtoa
1. Johdanto Kuvanprosessointi tai käsittely juontaa juurensa kahdesta pääasiallisesta alueesta, jotka ovat kuvainformaation parantaminen ihmisen tulkintaa varten ja kuvadatan käsittely talletusta, siirtoa
Vapaus. Määritelmä. jos c 1 v 1 + c 2 v c k v k = 0 joillakin c 1,..., c k R, niin c 1 = 0, c 2 = 0,..., c k = 0.
 Vapaus Määritelmä Oletetaan, että v 1, v 2,..., v k R n, missä n {1, 2,... }. Vektorijono ( v 1, v 2,..., v k ) on vapaa eli lineaarisesti riippumaton, jos seuraava ehto pätee: jos c 1 v 1 + c 2 v 2 +
Vapaus Määritelmä Oletetaan, että v 1, v 2,..., v k R n, missä n {1, 2,... }. Vektorijono ( v 1, v 2,..., v k ) on vapaa eli lineaarisesti riippumaton, jos seuraava ehto pätee: jos c 1 v 1 + c 2 v 2 +
8. Morfologinen kuvanprosessointi 8.1. Perusteita
 8. Morfologinen kuvanprosessointi 8.1. Perusteita Sana morfologia viittaa muotoon ja rakenteeseen eri tieteenaloilla. Kuvanprosessoinnissa se tarkoittaa matemaattista keinoa, jolla irrotetaan kuvasta kiinnostavia
8. Morfologinen kuvanprosessointi 8.1. Perusteita Sana morfologia viittaa muotoon ja rakenteeseen eri tieteenaloilla. Kuvanprosessoinnissa se tarkoittaa matemaattista keinoa, jolla irrotetaan kuvasta kiinnostavia
6. Värikuvanprosessointi 6.1. Värien periaatteet
 6. Värikuvanprosessointi 6.1. Värien periaatteet Värien käyttö kuvissa on hyödyllistä kahdesta syystä. Väri on tehokas kuvaaja kohteiden tunnistamiseksi ja erottamiseksi näkymästä. Toiseksi normaalilla
6. Värikuvanprosessointi 6.1. Värien periaatteet Värien käyttö kuvissa on hyödyllistä kahdesta syystä. Väri on tehokas kuvaaja kohteiden tunnistamiseksi ja erottamiseksi näkymästä. Toiseksi normaalilla
Kvantittuminen. E = hf f on säteilyn taajuus h on Planckin vakio h = 6, Js = 4, evs. Planckin kvanttihypoteesi
 Kvantittuminen Planckin kvanttihypoteesi Kappale vastaanottaa ja luovuttaa säteilyä vain tietyn suuruisina energia-annoksina eli kvantteina Kappaleen emittoima säteily ei ole jatkuvaa (kvantittuminen)
Kvantittuminen Planckin kvanttihypoteesi Kappale vastaanottaa ja luovuttaa säteilyä vain tietyn suuruisina energia-annoksina eli kvantteina Kappaleen emittoima säteily ei ole jatkuvaa (kvantittuminen)
Täydellisyysaksiooman kertaus
 Täydellisyysaksiooman kertaus Luku M R on joukon A R yläraja, jos a M kaikille a A. Luku M R on joukon A R alaraja, jos a M kaikille a A. A on ylhäältä (vast. alhaalta) rajoitettu, jos sillä on jokin yläraja
Täydellisyysaksiooman kertaus Luku M R on joukon A R yläraja, jos a M kaikille a A. Luku M R on joukon A R alaraja, jos a M kaikille a A. A on ylhäältä (vast. alhaalta) rajoitettu, jos sillä on jokin yläraja
Tampereen yliopisto Tietokonegrafiikka 2013 Tietojenkäsittelytiede Harjoitus
 Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
! 7! = N! x 8. x x 4 x + 1 = 6.
 9. 10. 2008 1. Pinnalta punaiseksi maalattu 3 3 3-kuutio jaetaan 27:ksi samankokoiseksi kuutioksi. Mikä osuus 27 pikkukuution kokonaispinta-alasta on punaiseksi maalattu? 2. Positiivisen kokonaisluvun
9. 10. 2008 1. Pinnalta punaiseksi maalattu 3 3 3-kuutio jaetaan 27:ksi samankokoiseksi kuutioksi. Mikä osuus 27 pikkukuution kokonaispinta-alasta on punaiseksi maalattu? 2. Positiivisen kokonaisluvun
Braggin ehdon mukaan hilatasojen etäisyys (111)-tasoille on
-tasoille on") 763343A KIINTEÄN AINEEN FYSIIKKA Ratkaisut 2 Kevät 2018 1. Tehtävä: Kuparin kiderakenne on pkk. Käyttäen säteilyä, jonka aallonpituus on 0.1537 nm, havaittiin kuparin (111-heijastus sirontakulman θ arvolla
763343A KIINTEÄN AINEEN FYSIIKKA Ratkaisut 2 Kevät 2018 1. Tehtävä: Kuparin kiderakenne on pkk. Käyttäen säteilyä, jonka aallonpituus on 0.1537 nm, havaittiin kuparin (111-heijastus sirontakulman θ arvolla
1467S Digitaalinen kuvankäsittely 1.1 Mitä digitaalinen kuvankäsittely on
 1467S Digitaalinen kuvankäsittely 1 Johdanto 1.1 Mitä digitaalinen kuvankäsittely on Kuva voidaan ajatella kaksiulotteiseksi funktioksi f(x, y), jossa x ja y ovat koordinaatit ja f:n arvo pisteessä (x,
1467S Digitaalinen kuvankäsittely 1 Johdanto 1.1 Mitä digitaalinen kuvankäsittely on Kuva voidaan ajatella kaksiulotteiseksi funktioksi f(x, y), jossa x ja y ovat koordinaatit ja f:n arvo pisteessä (x,
3.1 Lineaarikuvaukset. MS-A0004/A0006 Matriisilaskenta. 3.1 Lineaarikuvaukset. 3.1 Lineaarikuvaukset
 31 MS-A0004/A0006 Matriisilaskenta 3 Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2292015 Lineaariset yhtälöt ovat vektoreille luonnollisia yhtälöitä, joita
31 MS-A0004/A0006 Matriisilaskenta 3 Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2292015 Lineaariset yhtälöt ovat vektoreille luonnollisia yhtälöitä, joita
Infrapunaspektroskopia
 ultravioletti näkyvä valo Infrapunaspektroskopia IHMISEN JA ELINYMPÄ- RISTÖN KEMIAA, KE2 Kertausta sähkömagneettisesta säteilystä Sekä IR-spektroskopia että NMR-spektroskopia käyttävät sähkömagneettista
ultravioletti näkyvä valo Infrapunaspektroskopia IHMISEN JA ELINYMPÄ- RISTÖN KEMIAA, KE2 Kertausta sähkömagneettisesta säteilystä Sekä IR-spektroskopia että NMR-spektroskopia käyttävät sähkömagneettista
y=-3x+2 y=2x-3 y=3x+2 x = = 6
 MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
Tekijä Pitkä matematiikka Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4).
, ( 2,1), (1, 0), (4, 1) ja ( 11, 4).") Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9.2.2011
 PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9..0 Kokeessa saa vastata enintään kymmeneen tehtävään.. Sievennä a) 9 x x 6x + 9, b) 5 9 009 a a, c) log 7 + lne 7. Muovailuvahasta tehty säännöllinen tetraedri muovataan
PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9..0 Kokeessa saa vastata enintään kymmeneen tehtävään.. Sievennä a) 9 x x 6x + 9, b) 5 9 009 a a, c) log 7 + lne 7. Muovailuvahasta tehty säännöllinen tetraedri muovataan
1. STEREOKUVAPARIN OTTAMINEN ANAGLYFIKUVIA VARTEN. Hyvien stereokuvien ottaminen edellyttää kahden perusasian ymmärtämistä.
 3-D ANAGLYFIKUVIEN TUOTTAMINEN Fotogrammetrian ja kaukokartoituksen laboratorio Teknillinen korkeakoulu Petri Rönnholm Perustyövaiheet: A. Ota stereokuvapari B. Poista vasemmasta kuvasta vihreä ja sininen
3-D ANAGLYFIKUVIEN TUOTTAMINEN Fotogrammetrian ja kaukokartoituksen laboratorio Teknillinen korkeakoulu Petri Rönnholm Perustyövaiheet: A. Ota stereokuvapari B. Poista vasemmasta kuvasta vihreä ja sininen
isomeerejä yhteensä yhdeksän kappaletta.
 Tehtävä 2 : 1 Esitetään aluksi eräitä havaintoja. Jokaisella n Z + symbolilla H (n) merkitään kaikkien niiden verkkojen joukkoa, jotka vastaavat jotakin tehtävänannon ehtojen mukaista alkaanin hiiliketjua
Tehtävä 2 : 1 Esitetään aluksi eräitä havaintoja. Jokaisella n Z + symbolilla H (n) merkitään kaikkien niiden verkkojen joukkoa, jotka vastaavat jotakin tehtävänannon ehtojen mukaista alkaanin hiiliketjua
= 5! 2 2!3! = = 10. Edelleen tästä joukosta voidaan valita kolme särmää yhteensä = 10! 3 3!7! = = 120
 Tehtävä 1 : 1 Merkitään jatkossa kirjaimella H kaikkien solmujoukon V sellaisten verkkojen kokoelmaa, joissa on tasan kolme särmää. a) Jokainen verkko G H toteuttaa väitteen E(G) [V]. Toisaalta jokainen
Tehtävä 1 : 1 Merkitään jatkossa kirjaimella H kaikkien solmujoukon V sellaisten verkkojen kokoelmaa, joissa on tasan kolme särmää. a) Jokainen verkko G H toteuttaa väitteen E(G) [V]. Toisaalta jokainen
Yhtälöryhmä matriisimuodossa. MS-A0007 Matriisilaskenta. Tarkastellaan esimerkkinä lineaarista yhtälöparia. 2x1 x 2 = 1 x 1 + x 2 = 5.
 2. MS-A000 Matriisilaskenta 2. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2..205 Tarkastellaan esimerkkinä lineaarista yhtälöparia { 2x x 2 = x x 2 =
2. MS-A000 Matriisilaskenta 2. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2..205 Tarkastellaan esimerkkinä lineaarista yhtälöparia { 2x x 2 = x x 2 =
Lineaarikombinaatio, lineaarinen riippuvuus/riippumattomuus
 Lineaarikombinaatio, lineaarinen riippuvuus/riippumattomuus 1 / 51 Lineaarikombinaatio Johdattelua seuraavaan asiaan (ei tarkkoja määritelmiä): Millaisen kuvan muodostaa joukko {λv λ R, v R 3 }? Millaisen
Lineaarikombinaatio, lineaarinen riippuvuus/riippumattomuus 1 / 51 Lineaarikombinaatio Johdattelua seuraavaan asiaan (ei tarkkoja määritelmiä): Millaisen kuvan muodostaa joukko {λv λ R, v R 3 }? Millaisen
Maksimit ja minimit 1/5 Sisältö ESITIEDOT: reaalifunktiot, derivaatta
 Maksimit ja minimit 1/5 Sisältö Funktion kasvavuus ja vähenevyys; paikalliset ääriarvot Jos derivoituvan reaalifunktion f derivaatta tietyssä pisteessä on positiivinen, f (x 0 ) > 0, niin funktion tangentti
Maksimit ja minimit 1/5 Sisältö Funktion kasvavuus ja vähenevyys; paikalliset ääriarvot Jos derivoituvan reaalifunktion f derivaatta tietyssä pisteessä on positiivinen, f (x 0 ) > 0, niin funktion tangentti
Yhtälöryhmä matriisimuodossa. MS-A0004/A0006 Matriisilaskenta. Tarkastellaan esimerkkinä lineaarista yhtälöparia. 2x1 x 2 = 1 x 1 + x 2 = 5.
 2. MS-A4/A6 Matriisilaskenta 2. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 5.9.25 Tarkastellaan esimerkkinä lineaarista yhtälöparia { 2x x 2 = x + x 2
2. MS-A4/A6 Matriisilaskenta 2. Nuutti Hyvönen, c Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 5.9.25 Tarkastellaan esimerkkinä lineaarista yhtälöparia { 2x x 2 = x + x 2
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
VALAISTUSTA VALOSTA. Fysiikan ja kemian perusteet ja pedagogiikka. Kari Sormunen Kevät 2014
 VALAISTUSTA VALOSTA Fysiikan ja kemian perusteet ja pedagogiikka Kari Sormunen Kevät 2014 OPPILAIDEN KÄSITYKSIÄ VALOSTA Oppilaat kuvittelevat, että valo etenee katsojan silmästä katsottavaan kohteeseen.
VALAISTUSTA VALOSTA Fysiikan ja kemian perusteet ja pedagogiikka Kari Sormunen Kevät 2014 OPPILAIDEN KÄSITYKSIÄ VALOSTA Oppilaat kuvittelevat, että valo etenee katsojan silmästä katsottavaan kohteeseen.
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
MS-A0003/A0005 Matriisilaskenta Laskuharjoitus 2 / vko 45
 MS-A3/A5 Matriisilaskenta Laskuharjoitus 2 / vko 45 Tehtävä (L): Hahmottele kompleksitasoon ne pisteet, jotka toteuttavat a) z 2i = 2, b) z 2i < 2, c) /z
MS-A3/A5 Matriisilaskenta Laskuharjoitus 2 / vko 45 Tehtävä (L): Hahmottele kompleksitasoon ne pisteet, jotka toteuttavat a) z 2i = 2, b) z 2i < 2, c) /z
3 = Lisäksi z(4, 9) = = 21, joten kysytty lineaarinen approksimaatio on. L(x,y) =
 = = 21, joten kysytty lineaarinen approksimaatio on. L(x,y) =") BM20A5810 Differentiaalilaskenta ja sovellukset Harjoitus 6, Syksy 2016 1. (a) Olkoon z = z(x,y) = yx 1/2 + y 1/2. Muodosta z:lle lineaarinen approksimaatio L(x,y) siten että approksimaation ja z:n arvot
BM20A5810 Differentiaalilaskenta ja sovellukset Harjoitus 6, Syksy 2016 1. (a) Olkoon z = z(x,y) = yx 1/2 + y 1/2. Muodosta z:lle lineaarinen approksimaatio L(x,y) siten että approksimaation ja z:n arvot
Ratkaisut vuosien tehtäviin
 Ratkaisut vuosien 1978 1987 tehtäviin Kaikki tehtävät ovat pitkän matematiikan kokeista. Eräissä tehtävissä on kaksi alakohtaa; ne olivat kokelaalle vaihtoehtoisia. 1978 Osoita, ettei mikään käyrän y 2
Ratkaisut vuosien 1978 1987 tehtäviin Kaikki tehtävät ovat pitkän matematiikan kokeista. Eräissä tehtävissä on kaksi alakohtaa; ne olivat kokelaalle vaihtoehtoisia. 1978 Osoita, ettei mikään käyrän y 2
Fysiikka 8. Aine ja säteily
 Fysiikka 8 Aine ja säteily Sähkömagneettinen säteily James Clerk Maxwell esitti v. 1864 sähkövarauksen ja sähkövirran sekä sähkö- ja magneettikentän välisiä riippuvuuksia kuvaavan teorian. Maxwellin teorian
Fysiikka 8 Aine ja säteily Sähkömagneettinen säteily James Clerk Maxwell esitti v. 1864 sähkövarauksen ja sähkövirran sekä sähkö- ja magneettikentän välisiä riippuvuuksia kuvaavan teorian. Maxwellin teorian
2.2. Kohteiden konstruktiivinen avaruusgeometrinen esitys
 .. Kohteiden konstruktiivinen avaruusgeometrinen esitys Avaruusgeometrinen esitys on käyttäjäriippuvainen ja vaati erikoismenetelmiä tai lopuksi konversion monikulmiomalliksi. Se on korkean tason esitys
.. Kohteiden konstruktiivinen avaruusgeometrinen esitys Avaruusgeometrinen esitys on käyttäjäriippuvainen ja vaati erikoismenetelmiä tai lopuksi konversion monikulmiomalliksi. Se on korkean tason esitys
Osoita, että kaikki paraabelit ovat yhdenmuotoisia etsimällä skaalauskuvaus, joka vie paraabelin y = ax 2 paraabelille y = bx 2. VASTAUS: , b = 2 2
 8. Geometriset kuvaukset 8.1. Euklidiset kuvaukset 344. Esitä muodossa x = Ax + b se avaruuden E 3 peilauskuvaus, jonka symmetriatasona on x 1 3x + x 3 = 6. A = 1 3 6 6 3, b = 1 1 18. 3 6 6 345. Tason
8. Geometriset kuvaukset 8.1. Euklidiset kuvaukset 344. Esitä muodossa x = Ax + b se avaruuden E 3 peilauskuvaus, jonka symmetriatasona on x 1 3x + x 3 = 6. A = 1 3 6 6 3, b = 1 1 18. 3 6 6 345. Tason
2 Pistejoukko koordinaatistossa
 Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Vektoreiden virittämä aliavaruus
 Vektoreiden virittämä aliavaruus Määritelmä Oletetaan, että v 1, v 2,... v k R n. Näiden vektoreiden virittämä aliavaruus span( v 1, v 2,... v k ) tarkoittaa kyseisten vektoreiden kaikkien lineaarikombinaatioiden
Vektoreiden virittämä aliavaruus Määritelmä Oletetaan, että v 1, v 2,... v k R n. Näiden vektoreiden virittämä aliavaruus span( v 1, v 2,... v k ) tarkoittaa kyseisten vektoreiden kaikkien lineaarikombinaatioiden
7.4 PERUSPISTEIDEN SIJAINTI
 67 7.4 PERUSPISTEIDEN SIJAINTI Optisen systeemin peruspisteet saadaan systeemimatriisista. Käytetään seuraavan kuvan merkintöjä: Kuvassa sisäänmenotaso on ensimmäisen linssin ensimmäisessä pinnassa eli
67 7.4 PERUSPISTEIDEN SIJAINTI Optisen systeemin peruspisteet saadaan systeemimatriisista. Käytetään seuraavan kuvan merkintöjä: Kuvassa sisäänmenotaso on ensimmäisen linssin ensimmäisessä pinnassa eli
13. Värit tietokonegrafiikassa
 13.1. Värijoukot tietokonegrafiikassa 13. Värit tietokonegrafiikassa Tarkastellaan seuraavaksi värien kvantitatiivista pohjaa. Useimmiten käytännön tilanteissa kiinnitetään huomiota kvalitatiiviseen. Värien
13.1. Värijoukot tietokonegrafiikassa 13. Värit tietokonegrafiikassa Tarkastellaan seuraavaksi värien kvantitatiivista pohjaa. Useimmiten käytännön tilanteissa kiinnitetään huomiota kvalitatiiviseen. Värien
12.5. Vertailua. Silmäillään laskostumisen estoa tietokonegrafiikan kannalta. Kuva 12.8. luonnehtii vaihtoehtoja.
 1.5. Vertailua Silmäillään laskostumisen estoa tietokonegrafiikan kannalta. Kuva 1.8. luonnehtii vaihtoehtoja. (1)Esisuodatus äärettömästi näytteitä pikseliä kohti Lasketaan projisoidun kohteen palojen
1.5. Vertailua Silmäillään laskostumisen estoa tietokonegrafiikan kannalta. Kuva 1.8. luonnehtii vaihtoehtoja. (1)Esisuodatus äärettömästi näytteitä pikseliä kohti Lasketaan projisoidun kohteen palojen
A ja B pelaavat sarjan pelejä. Sarjan voittaja on se, joka ensin voittaa n peliä.
 Esimerkki otteluvoiton todennäköisyys A ja B pelaavat sarjan pelejä. Sarjan voittaja on se, joka ensin voittaa n peliä. Yksittäisessä pelissä A voittaa todennäköisyydellä p ja B todennäköisyydellä q =
Esimerkki otteluvoiton todennäköisyys A ja B pelaavat sarjan pelejä. Sarjan voittaja on se, joka ensin voittaa n peliä. Yksittäisessä pelissä A voittaa todennäköisyydellä p ja B todennäköisyydellä q =
Kenguru Student (lukion 2. ja 3. vuosi) sivu 1 / 6
 sivu 1 / 6") Kenguru Student (lukion 2. ja 3. vuosi) sivu 1 / 6 NIMI LUOKKA/RYHMÄ Pisteet: Kenguruloikan pituus: Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto.
Kenguru Student (lukion 2. ja 3. vuosi) sivu 1 / 6 NIMI LUOKKA/RYHMÄ Pisteet: Kenguruloikan pituus: Irrota tämä vastauslomake tehtävämonisteesta. Merkitse tehtävän numeron alle valitsemasi vastausvaihtoehto.
Datatähti 2019 loppu
 Datatähti 2019 loppu task type time limit memory limit A Summa standard 1.00 s 512 MB B Bittijono standard 1.00 s 512 MB C Auringonlasku standard 1.00 s 512 MB D Binääripuu standard 1.00 s 512 MB E Funktio
Datatähti 2019 loppu task type time limit memory limit A Summa standard 1.00 s 512 MB B Bittijono standard 1.00 s 512 MB C Auringonlasku standard 1.00 s 512 MB D Binääripuu standard 1.00 s 512 MB E Funktio
Ympyrän yhtälö
 Ympyrän yhtälö ANALYYTTINEN GEOMETRIA MAA4 On melko selvää, että origokeskisen ja r-säteisen ympyrän yhtälö voidaan esittää muodossa x 2 + y 2 = r 2. Vastaavalla tavalla muodostetaan ympyrän yhtälö, jonka
Ympyrän yhtälö ANALYYTTINEN GEOMETRIA MAA4 On melko selvää, että origokeskisen ja r-säteisen ympyrän yhtälö voidaan esittää muodossa x 2 + y 2 = r 2. Vastaavalla tavalla muodostetaan ympyrän yhtälö, jonka
Sekalaiset tehtävät, 11. syyskuuta 2005, sivu 1 / 13. Tehtäviä
 Sekalaiset tehtävät, 11. syyskuuta 005, sivu 1 / 13 Tehtäviä Tehtävä 1. Johda toiseen asteen yhtälön ax + bx + c = 0, a 0 ratkaisukaava. Tehtävä. Määrittele joukon A R pienin yläraja sup A ja suurin alaraja
Sekalaiset tehtävät, 11. syyskuuta 005, sivu 1 / 13 Tehtäviä Tehtävä 1. Johda toiseen asteen yhtälön ax + bx + c = 0, a 0 ratkaisukaava. Tehtävä. Määrittele joukon A R pienin yläraja sup A ja suurin alaraja
Numeeriset menetelmät TIEA381. Luento 7. Kirsi Valjus. Jyväskylän yliopisto. Luento 7 () Numeeriset menetelmät / 43
 Numeeriset menetelmät / 43") Numeeriset menetelmät TIEA381 Luento 7 Kirsi Valjus Jyväskylän yliopisto Luento 7 () Numeeriset menetelmät 10.4.2013 1 / 43 Luennon 7 sisältö Interpolointi ja approksimointi Interpolaatiovirheestä Paloittainen
Numeeriset menetelmät TIEA381 Luento 7 Kirsi Valjus Jyväskylän yliopisto Luento 7 () Numeeriset menetelmät 10.4.2013 1 / 43 Luennon 7 sisältö Interpolointi ja approksimointi Interpolaatiovirheestä Paloittainen
Kuva 1: Funktion f tasa-arvokäyriä. Ratkaisu. Suurin kasvunopeus on gradientin suuntaan. 6x 0,2
 HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi I, syksy 018 Harjoitus Ratkaisuehdotukset Tehtävä 1. Olkoon f : R R f(x 1, x ) = x 1 + x Olkoon C R. Määritä tasa-arvojoukko Sf(C) = {(x 1, x
HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi I, syksy 018 Harjoitus Ratkaisuehdotukset Tehtävä 1. Olkoon f : R R f(x 1, x ) = x 1 + x Olkoon C R. Määritä tasa-arvojoukko Sf(C) = {(x 1, x
x j x k Tällöin L j (x k ) = 0, kun k j, ja L j (x j ) = 1. Alkuperäiselle interpolaatio-ongelmalle saadaan nyt ratkaisu
 = 0, kun k j, ja L j (x j ) = 1. Alkuperäiselle interpolaatio-ongelmalle saadaan nyt ratkaisu") 2 Interpolointi Olkoon annettuna n+1 eri pistettä x 0, x 1, x n R ja n+1 lukua y 0, y 1,, y n Interpoloinnissa etsitään funktiota P, joka annetuissa pisteissä x 0,, x n saa annetut arvot y 0,, y n, (21)
2 Interpolointi Olkoon annettuna n+1 eri pistettä x 0, x 1, x n R ja n+1 lukua y 0, y 1,, y n Interpoloinnissa etsitään funktiota P, joka annetuissa pisteissä x 0,, x n saa annetut arvot y 0,, y n, (21)
Kuva 1: Yksinkertainen siniaalto. Amplitudi kertoo heilahduksen laajuuden ja aallonpituus
 Kuva 1: Yksinkertainen siniaalto. Amplitudi kertoo heilahduksen laajuuden ja aallonpituus värähtelytiheyden. 1 Funktiot ja aallot Aiemmin käsiteltiin funktioita ja miten niiden avulla voidaan kuvata fysiikan
Kuva 1: Yksinkertainen siniaalto. Amplitudi kertoo heilahduksen laajuuden ja aallonpituus värähtelytiheyden. 1 Funktiot ja aallot Aiemmin käsiteltiin funktioita ja miten niiden avulla voidaan kuvata fysiikan
Talousmatematiikan perusteet: Luento 11. Lineaarikuvaus Matriisin aste Käänteismatriisi
 Talousmatematiikan perusteet: Luento 11 Lineaarikuvaus Matriisin aste Käänteismatriisi Viime luennolla Käsittelimme matriisien peruskäsitteitä ja laskutoimituksia Vakiolla kertominen, yhteenlasku ja vähennyslasku
Talousmatematiikan perusteet: Luento 11 Lineaarikuvaus Matriisin aste Käänteismatriisi Viime luennolla Käsittelimme matriisien peruskäsitteitä ja laskutoimituksia Vakiolla kertominen, yhteenlasku ja vähennyslasku
VALAISTUSTA VALOSTA. Fysiikan ja kemian pedagogiikan perusteet. Kari Sormunen Syksy 2014
 VALAISTUSTA VALOSTA Fysiikan ja kemian pedagogiikan perusteet Kari Sormunen Syksy 2014 OPPILAIDEN KÄSITYKSIÄ VALOSTA Oppilaat kuvittelevat, että valo etenee katsojan silmästä katsottavaan kohteeseen. Todellisuudessa
VALAISTUSTA VALOSTA Fysiikan ja kemian pedagogiikan perusteet Kari Sormunen Syksy 2014 OPPILAIDEN KÄSITYKSIÄ VALOSTA Oppilaat kuvittelevat, että valo etenee katsojan silmästä katsottavaan kohteeseen. Todellisuudessa
Matematiikan tukikurssi, kurssikerta 3
 Matematiikan tukikurssi, kurssikerta 3 1 Epäyhtälöitä Aivan aluksi lienee syytä esittää luvun itseisarvon määritelmä: { x kun x 0 x = x kun x < 0 Siispä esimerkiksi 10 = 10 ja 10 = 10. Seuraavaksi listaus
Matematiikan tukikurssi, kurssikerta 3 1 Epäyhtälöitä Aivan aluksi lienee syytä esittää luvun itseisarvon määritelmä: { x kun x 0 x = x kun x < 0 Siispä esimerkiksi 10 = 10 ja 10 = 10. Seuraavaksi listaus
Yhtälönratkaisusta. Johanna Rämö, Helsingin yliopisto. 22. syyskuuta 2014
 Yhtälönratkaisusta Johanna Rämö, Helsingin yliopisto 22. syyskuuta 2014 Yhtälönratkaisu on koulusta tuttua, mutta usein sitä tehdään mekaanisesti sen kummempia ajattelematta. Jotta pystytään ratkaisemaan
Yhtälönratkaisusta Johanna Rämö, Helsingin yliopisto 22. syyskuuta 2014 Yhtälönratkaisu on koulusta tuttua, mutta usein sitä tehdään mekaanisesti sen kummempia ajattelematta. Jotta pystytään ratkaisemaan
, on säännöllinen 2-ulotteinen pinta. Määrää T x0 pisteessä x 0 = (0, 1, 1).
.") HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi II, syksy 017 Harjoitus 4 Ratkaisuehdotukset 4.1. Osoita, että tasa-arvojoukko S F (0), F : R 3 R, F (x) = 3x 1 x 3 + e x + x e x 3, on säännöllinen
HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi II, syksy 017 Harjoitus 4 Ratkaisuehdotukset 4.1. Osoita, että tasa-arvojoukko S F (0), F : R 3 R, F (x) = 3x 1 x 3 + e x + x e x 3, on säännöllinen
Johdatus tekoälyn taustalla olevaan matematiikkaan
 Johdatus tekoälyn taustalla olevaan matematiikkaan Informaatioteknologian tiedekunta Jyväskylän yliopisto 3. luento 17.11.2017 Neuroverkon opettaminen (ohjattu oppiminen) Neuroverkkoa opetetaan syöte-tavoite-pareilla
Johdatus tekoälyn taustalla olevaan matematiikkaan Informaatioteknologian tiedekunta Jyväskylän yliopisto 3. luento 17.11.2017 Neuroverkon opettaminen (ohjattu oppiminen) Neuroverkkoa opetetaan syöte-tavoite-pareilla
Kohina. Havaittujen fotonien statistinen virhe on kääntäen verrannollinen havaittujen fotonien lukumäärän N neliö juureen ( T 1/ N)
") Kohina Havaittujen fotonien statistinen virhe on kääntäen verrannollinen havaittujen fotonien lukumäärän N neliö juureen ( T 1/ N) N on suoraan verrannollinen integraatioaikaan t ja havaittuun taajuusväliin
Kohina Havaittujen fotonien statistinen virhe on kääntäen verrannollinen havaittujen fotonien lukumäärän N neliö juureen ( T 1/ N) N on suoraan verrannollinen integraatioaikaan t ja havaittuun taajuusväliin
MS-A0003/A0005 Matriisilaskenta Laskuharjoitus 2 / vko 45
 MS-A0003/A0005 Matriisilaskenta Laskuharjoitus / vko 5 Tehtävä 1 (L): Hahmottele kompleksitasoon ne pisteet, jotka toteuttavat a) z 3 =, b) z + 3 i < 3, c) 1/z >. Yleisesti: ehto z = R, z C muodostaa kompleksitasoon
MS-A0003/A0005 Matriisilaskenta Laskuharjoitus / vko 5 Tehtävä 1 (L): Hahmottele kompleksitasoon ne pisteet, jotka toteuttavat a) z 3 =, b) z + 3 i < 3, c) 1/z >. Yleisesti: ehto z = R, z C muodostaa kompleksitasoon
CCD-kamerat ja kuvankäsittely
 CCD-kamerat ja kuvankäsittely Kari Nilsson Finnish Centre for Astronomy with ESO (FINCA) Turun Yliopisto 6.10.2011 Kari Nilsson (FINCA) CCD-havainnot 6.10.2011 1 / 23 Sisältö 1 CCD-kamera CCD-kameran toimintaperiaate
CCD-kamerat ja kuvankäsittely Kari Nilsson Finnish Centre for Astronomy with ESO (FINCA) Turun Yliopisto 6.10.2011 Kari Nilsson (FINCA) CCD-havainnot 6.10.2011 1 / 23 Sisältö 1 CCD-kamera CCD-kameran toimintaperiaate
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
MS-A010{3,4} (ELEC*) Differentiaali- ja integraalilaskenta 1 Luento 3: Jatkuvuus
 Differentiaali- ja integraalilaskenta 1 Luento 3: Jatkuvuus") MS-A010{3,4} (ELEC*) Differentiaali- ja integraalilaskenta 1 Luento 3: Jatkuvuus Pekka Alestalo, Jarmo Malinen Aalto-yliopisto, Matematiikan ja systeemianalyysin laitos 19.9.2016 Pekka Alestalo, Jarmo
MS-A010{3,4} (ELEC*) Differentiaali- ja integraalilaskenta 1 Luento 3: Jatkuvuus Pekka Alestalo, Jarmo Malinen Aalto-yliopisto, Matematiikan ja systeemianalyysin laitos 19.9.2016 Pekka Alestalo, Jarmo
Virheen kasautumislaki
 Virheen kasautumislaki Yleensä tutkittava suure f saadaan välillisesti mitattavista parametreistä. Tällöin kokonaisvirhe f määräytyy mitattujen parametrien virheiden perusteella virheen kasautumislain
Virheen kasautumislaki Yleensä tutkittava suure f saadaan välillisesti mitattavista parametreistä. Tällöin kokonaisvirhe f määräytyy mitattujen parametrien virheiden perusteella virheen kasautumislain
FUNKTIONAALIANALYYSIN PERUSKURSSI 1. 0. Johdanto
 FUNKTIONAALIANALYYSIN PERUSKURSSI 1. Johdanto Funktionaalianalyysissa tutkitaan muun muassa ääretönulotteisten vektoriavaruuksien, ja erityisesti täydellisten normiavaruuksien eli Banach avaruuksien ominaisuuksia.
FUNKTIONAALIANALYYSIN PERUSKURSSI 1. Johdanto Funktionaalianalyysissa tutkitaan muun muassa ääretönulotteisten vektoriavaruuksien, ja erityisesti täydellisten normiavaruuksien eli Banach avaruuksien ominaisuuksia.
Injektio (1/3) Funktio f on injektio, joss. f (x 1 ) = f (x 2 ) x 1 = x 2 x 1, x 2 D(f )
 Funktio f on injektio, joss. f (x 1 ) = f (x 2 ) x 1 = x 2 x 1, x 2 D(f )") Injektio (1/3) Määritelmä Funktio f on injektio, joss f (x 1 ) = f (x 2 ) x 1 = x 2 x 1, x 2 D(f ) Seurauksia: Jatkuva injektio on siis aina joko aidosti kasvava tai aidosti vähenevä Injektiolla on enintään
Injektio (1/3) Määritelmä Funktio f on injektio, joss f (x 1 ) = f (x 2 ) x 1 = x 2 x 1, x 2 D(f ) Seurauksia: Jatkuva injektio on siis aina joko aidosti kasvava tai aidosti vähenevä Injektiolla on enintään
Tekijä Pitkä matematiikka
 K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
Tekijä Pitkä matematiikka Pisteen (x, y) etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.
 etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.") Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS AI-TUTKIJAN URANÄKYMIÄ AJATUSTENLUKUA COMPUTER VISION SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA MUUTTUJIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA
JOHDATUS TEKOÄLYYN TEEMU ROOS AI-TUTKIJAN URANÄKYMIÄ AJATUSTENLUKUA COMPUTER VISION SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA MUUTTUJIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA
Cantorin joukon suoristuvuus tasossa
 Cantorin joukon suoristuvuus tasossa LuK-tutkielma Miika Savolainen 2380207 Matemaattisten tieteiden laitos Oulun yliopisto Syksy 2016 Sisältö Johdanto 2 1 Cantorin joukon esittely 2 2 Suoristuvuus ja
Cantorin joukon suoristuvuus tasossa LuK-tutkielma Miika Savolainen 2380207 Matemaattisten tieteiden laitos Oulun yliopisto Syksy 2016 Sisältö Johdanto 2 1 Cantorin joukon esittely 2 2 Suoristuvuus ja
VÄRIT 12.2.2015 WWW-VISUALISOINTI - IIM60110 - VÄRIT
 VÄRIT 12.2.2015 Väri on silmään saapuvan valon aistittava ominaisuus, joka havaitaan näkö- ja väriaistilla. Värin aistiminen riippuu silmään saapuvan valon sisältämistä aallonpituuksista ja niiden voimakkuuksista.
VÄRIT 12.2.2015 Väri on silmään saapuvan valon aistittava ominaisuus, joka havaitaan näkö- ja väriaistilla. Värin aistiminen riippuu silmään saapuvan valon sisältämistä aallonpituuksista ja niiden voimakkuuksista.
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
Määritelmä Olkoon T i L (V i, W i ), 1 i m. Yksikäsitteisen lineaarikuvauksen h L (V 1 V 2 V m, W 1 W 2 W m )
, 1 i m. Yksikäsitteisen lineaarikuvauksen h L (V 1 V 2 V m, W 1 W 2 W m )") Määritelmä 519 Olkoon T i L V i, W i, 1 i m Yksikäsitteisen lineaarikuvauksen h L V 1 V 2 V m, W 1 W 2 W m h v 1 v 2 v m T 1 v 1 T 2 v 2 T m v m 514 sanotaan olevan kuvausten T 1,, T m indusoima ja sitä
Määritelmä 519 Olkoon T i L V i, W i, 1 i m Yksikäsitteisen lineaarikuvauksen h L V 1 V 2 V m, W 1 W 2 W m h v 1 v 2 v m T 1 v 1 T 2 v 2 T m v m 514 sanotaan olevan kuvausten T 1,, T m indusoima ja sitä
Erityinen suhteellisuusteoria (Harris luku 2)
") Erityinen suhteellisuusteoria (Harris luku 2) Yliopistonlehtori, TkT Sami Kujala Mikro- ja nanotekniikan laitos Kevät 2016 Ajan ja pituuden suhteellisuus Relativistinen työ ja kokonaisenergia SMG-aaltojen
Erityinen suhteellisuusteoria (Harris luku 2) Yliopistonlehtori, TkT Sami Kujala Mikro- ja nanotekniikan laitos Kevät 2016 Ajan ja pituuden suhteellisuus Relativistinen työ ja kokonaisenergia SMG-aaltojen
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys102 Syksy 2009 Jukka Maalampi LUENTO 12 Aallot kahdessa ja kolmessa ulottuvuudessa Toistaiseksi on tarkasteltu aaltoja, jotka etenevät yhteen suuntaan. Yleisempiä tapauksia ovat
Mekaniikan jatkokurssi Fys102 Syksy 2009 Jukka Maalampi LUENTO 12 Aallot kahdessa ja kolmessa ulottuvuudessa Toistaiseksi on tarkasteltu aaltoja, jotka etenevät yhteen suuntaan. Yleisempiä tapauksia ovat
10. Globaali valaistus
 10. Globaali valaistus Globaalilla eli kokonaisvalaistuksella tarkoitetaan tietokonegrafiikassa malleja, jotka renderöivät kuvaa laskien pisteestä x heijastuneen valon ottamalla huomioon kaiken tähän pisteeseen
10. Globaali valaistus Globaalilla eli kokonaisvalaistuksella tarkoitetaan tietokonegrafiikassa malleja, jotka renderöivät kuvaa laskien pisteestä x heijastuneen valon ottamalla huomioon kaiken tähän pisteeseen
Lineaariavaruudet. Span. Sisätulo. Normi. Matriisinormit. Matriisinormit. aiheita. Aiheet. Reaalinen lineaariavaruus. Span. Sisätulo.
 Lineaariavaruudet aiheita 1 määritelmä Nelikko (L, R, +, ) on reaalinen (eli reaalinen vektoriavaruus), jos yhteenlasku L L L, ( u, v) a + b ja reaaliluvulla kertominen R L L, (λ, u) λ u toteuttavat seuraavat
Lineaariavaruudet aiheita 1 määritelmä Nelikko (L, R, +, ) on reaalinen (eli reaalinen vektoriavaruus), jos yhteenlasku L L L, ( u, v) a + b ja reaaliluvulla kertominen R L L, (λ, u) λ u toteuttavat seuraavat
yleisessä muodossa x y ax by c 0. 6p
 MAA..0 Muista kirjoittaa jokaiseen paperiin nimesi! Tee vastauspaperin yläreunaan pisteytysruudukko! Valitse kuusi tehtävää! Perustele vastauksesi välivaiheilla! Jussi Tyni Ratkaise: a) x x b) xy x 6y
MAA..0 Muista kirjoittaa jokaiseen paperiin nimesi! Tee vastauspaperin yläreunaan pisteytysruudukko! Valitse kuusi tehtävää! Perustele vastauksesi välivaiheilla! Jussi Tyni Ratkaise: a) x x b) xy x 6y
Monikulmiot 1/5 Sisältö ESITIEDOT: kolmio
 Monikulmiot 1/5 Sisältö Monikulmio Monikulmioksi kutsutaan tasokuviota, jota rajaa perättäisten janojen muodostama monikulmion piiri. Janat ovat monikulmion sivuja, niiden päätepisteet monikulmion kärkipisteitä.
Monikulmiot 1/5 Sisältö Monikulmio Monikulmioksi kutsutaan tasokuviota, jota rajaa perättäisten janojen muodostama monikulmion piiri. Janat ovat monikulmion sivuja, niiden päätepisteet monikulmion kärkipisteitä.
7. Olemassaolo ja yksikäsitteisyys Galois n kunta GF(q) = F q, jossa on q alkiota, määriteltiin jäännösluokkarenkaaksi
 = F q, jossa on q alkiota, määriteltiin jäännösluokkarenkaaksi") 7. Olemassaolo ja yksikäsitteisyys Galois n kunta GF(q) = F q, jossa on q alkiota, määriteltiin jäännösluokkarenkaaksi Z p [x]/(m), missä m on polynomirenkaan Z p [x] jaoton polynomi (ks. määritelmä 3.19).
7. Olemassaolo ja yksikäsitteisyys Galois n kunta GF(q) = F q, jossa on q alkiota, määriteltiin jäännösluokkarenkaaksi Z p [x]/(m), missä m on polynomirenkaan Z p [x] jaoton polynomi (ks. määritelmä 3.19).
Mikroskooppisten kohteiden
 Mikroskooppisten kohteiden lämpötilamittaukset itt t Maksim Shpak Planckin laki I BB ( λ T ) = 2hc λ, 5 2 1 hc λ e λkt 11 I ( λ, T ) = ε ( λ, T ) I ( λ T ) m BB, 0 < ε
Mikroskooppisten kohteiden lämpötilamittaukset itt t Maksim Shpak Planckin laki I BB ( λ T ) = 2hc λ, 5 2 1 hc λ e λkt 11 I ( λ, T ) = ε ( λ, T ) I ( λ T ) m BB, 0 < ε
Oletetaan ensin, että tangenttitaso on olemassa. Nyt pinnalla S on koordinaattiesitys ψ, jolle pätee että kaikilla x V U
 HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi II, syksy 018 Harjoitus 4 Ratkaisuehdotukset Tehtävä 1. Olkoon U R avoin joukko ja ϕ = (ϕ 1, ϕ, ϕ 3 ) : U R 3 kaksiulotteisen C 1 -alkeispinnan
HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi II, syksy 018 Harjoitus 4 Ratkaisuehdotukset Tehtävä 1. Olkoon U R avoin joukko ja ϕ = (ϕ 1, ϕ, ϕ 3 ) : U R 3 kaksiulotteisen C 1 -alkeispinnan
Aaltojen heijastuminen ja taittuminen
 Luku 11 Aaltojen heijastuminen ja taittuminen Tässä luvussa käsitellään sähkömagneettisten aaltojen heijastumista ja taittumista väliaineiden rajapinnalla. Rajoitutaan monokromaattisiin aaltoihin ja oletetaan
Luku 11 Aaltojen heijastuminen ja taittuminen Tässä luvussa käsitellään sähkömagneettisten aaltojen heijastumista ja taittumista väliaineiden rajapinnalla. Rajoitutaan monokromaattisiin aaltoihin ja oletetaan
Riemannin pintojen visualisoinnista
 Riemannin pintojen visualisoinnista eli Funktioiden R R kuvaajat Simo K. Kivelä 7.7.6 Tarkastelun kohteena olkoon kompleksimuuttujan kompleksiarvoinen funktio f : C C, f(z) = w eli f(x + iy) = u(x, y)
Riemannin pintojen visualisoinnista eli Funktioiden R R kuvaajat Simo K. Kivelä 7.7.6 Tarkastelun kohteena olkoon kompleksimuuttujan kompleksiarvoinen funktio f : C C, f(z) = w eli f(x + iy) = u(x, y)
BM20A5800 Funktiot, lineaarialgebra ja vektorit Harjoitus 4, Syksy 2016
 BM20A5800 Funktiot, lineaarialgebra ja vektorit Harjoitus 4, Syksy 2016 1. Hahmottele karkeasti funktion f : R R 2 piirtämällä sen arvoja muutamilla eri muuttujan arvoilla kaksiulotteiseen koordinaatistoon
BM20A5800 Funktiot, lineaarialgebra ja vektorit Harjoitus 4, Syksy 2016 1. Hahmottele karkeasti funktion f : R R 2 piirtämällä sen arvoja muutamilla eri muuttujan arvoilla kaksiulotteiseen koordinaatistoon
y 2 h 2), (a) Näytä, että virtauksessa olevan fluidialkion tilavuus ei muutu.
, (a) Näytä, että virtauksessa olevan fluidialkion tilavuus ei muutu.") Tehtävä 1 Tarkastellaan paineen ajamaa Poisseuille-virtausta kahden yhdensuuntaisen levyn välissä Levyjen välinen etäisyys on 2h Nopeusjakauma raossa on tällöin u(y) = 1 dp ( y 2 h 2), missä y = 0 on raon
Tehtävä 1 Tarkastellaan paineen ajamaa Poisseuille-virtausta kahden yhdensuuntaisen levyn välissä Levyjen välinen etäisyys on 2h Nopeusjakauma raossa on tällöin u(y) = 1 dp ( y 2 h 2), missä y = 0 on raon
Taso 1/5 Sisältö ESITIEDOT: vektori, koordinaatistot, piste, suora
 Taso 1/5 Sisältö Taso geometrisena peruskäsitteenä Kolmiulotteisen alkeisgeometrian peruskäsitteisiin kuuluu taso pisteen ja suoran lisäksi. Intuitiivisesti sitä voidaan ajatella joka suunnassa äärettömyyteen
Taso 1/5 Sisältö Taso geometrisena peruskäsitteenä Kolmiulotteisen alkeisgeometrian peruskäsitteisiin kuuluu taso pisteen ja suoran lisäksi. Intuitiivisesti sitä voidaan ajatella joka suunnassa äärettömyyteen
Numeeriset menetelmät TIEA381. Luento 6. Kirsi Valjus. Jyväskylän yliopisto. Luento 6 () Numeeriset menetelmät / 33
 Numeeriset menetelmät / 33") Numeeriset menetelmät TIEA381 Luento 6 Kirsi Valjus Jyväskylän yliopisto Luento 6 () Numeeriset menetelmät 4.4.2013 1 / 33 Luennon 6 sisältö Interpolointi ja approksimointi Polynomi-interpolaatio: Vandermonden
Numeeriset menetelmät TIEA381 Luento 6 Kirsi Valjus Jyväskylän yliopisto Luento 6 () Numeeriset menetelmät 4.4.2013 1 / 33 Luennon 6 sisältö Interpolointi ja approksimointi Polynomi-interpolaatio: Vandermonden
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 2017 Insinöörivalinnan matematiikan koe , Ratkaisut (Sarja A)
") Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 017 Insinöörivalinnan matematiikan koe 30..017, Ratkaisut (Sarja A) 1. a) Lukujen 9, 0, 3 ja x keskiarvo on. Määritä x. (1 p.) b) Mitkä reaaliluvut
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 017 Insinöörivalinnan matematiikan koe 30..017, Ratkaisut (Sarja A) 1. a) Lukujen 9, 0, 3 ja x keskiarvo on. Määritä x. (1 p.) b) Mitkä reaaliluvut
= = = 1 3.
 9. 10. 2008!"$#&%(')'*,#.-/* P1. lkuperäisen punaisen kuution pinta koostuu kuudesta 3 3-neliöstä, joten sen ala on 6 3 2 = 54. Koska 3 3 =, kuutio jakautuu leikatessa yksikkökuutioksi, joiden kokonaispinta-ala
9. 10. 2008!"$#&%(')'*,#.-/* P1. lkuperäisen punaisen kuution pinta koostuu kuudesta 3 3-neliöstä, joten sen ala on 6 3 2 = 54. Koska 3 3 =, kuutio jakautuu leikatessa yksikkökuutioksi, joiden kokonaispinta-ala
MATEMATIIKAN KOE, LYHYT OPPIMÄÄRÄ ESITYS pisteitykseksi
 MATEMATIIKAN KOE, LYHYT OPPIMÄÄRÄ 3.9.05 ESITYS pisteitykseksi Yleisohje tarkkuuksista: Ellei tehtävässä vaadittu tiettyä tarkkuutta, kelpaa numeerisissa vastauksissa ohjeen vastauksen lisäksi yksi merkitsevä
MATEMATIIKAN KOE, LYHYT OPPIMÄÄRÄ 3.9.05 ESITYS pisteitykseksi Yleisohje tarkkuuksista: Ellei tehtävässä vaadittu tiettyä tarkkuutta, kelpaa numeerisissa vastauksissa ohjeen vastauksen lisäksi yksi merkitsevä
 MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
763306A JOHDATUS SUHTEELLISUUSTEORIAAN 2 Ratkaisut 3 Kevät E 1 + c 2 m 2 = E (1) p 1 = P (2) E 2 1
 p 1 = P (2) E 2 1") 763306A JOHDATUS SUHTLLISUUSTORIAAN Ratkaisut 3 Kevät 07. Fuusioreaktio. Lähdetään suoraan annetuista yhtälöistä nergia on suoraan yhtälön ) mukaan + m ) p P ) m + p 3) M + P 4) + m 5) Ratkaistaan seuraavaksi
763306A JOHDATUS SUHTLLISUUSTORIAAN Ratkaisut 3 Kevät 07. Fuusioreaktio. Lähdetään suoraan annetuista yhtälöistä nergia on suoraan yhtälön ) mukaan + m ) p P ) m + p 3) M + P 4) + m 5) Ratkaistaan seuraavaksi
Suora 1/5 Sisältö ESITIEDOT: vektori, koordinaatistot, piste
 Suora 1/5 Sisältö KATSO MYÖS:, vektorialgebra, geometriset probleemat, taso Suora geometrisena peruskäsitteenä Pisteen ohella suora on geometrinen peruskäsite, jota varsinaisesti ei määritellä. Alkeisgeometriassa
Suora 1/5 Sisältö KATSO MYÖS:, vektorialgebra, geometriset probleemat, taso Suora geometrisena peruskäsitteenä Pisteen ohella suora on geometrinen peruskäsite, jota varsinaisesti ei määritellä. Alkeisgeometriassa
MAB3 - Harjoitustehtävien ratkaisut:
 MAB - Harjoitustehtävien ratkaisut: Funktio. Piirretään koordinaatistoakselit ja sijoitetaan pisteet:. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä. Funktiolla
MAB - Harjoitustehtävien ratkaisut: Funktio. Piirretään koordinaatistoakselit ja sijoitetaan pisteet:. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä. Funktiolla
Luku 8. Aluekyselyt. 8.1 Summataulukko
 Luku 8 Aluekyselyt Aluekysely on tiettyä taulukon väliä koskeva kysely. Tyypillisiä aluekyselyitä ovat, mikä on taulukon välin lukujen summa tai pienin luku välillä. Esimerkiksi seuraavassa taulukossa
Luku 8 Aluekyselyt Aluekysely on tiettyä taulukon väliä koskeva kysely. Tyypillisiä aluekyselyitä ovat, mikä on taulukon välin lukujen summa tai pienin luku välillä. Esimerkiksi seuraavassa taulukossa
Algebra I, Harjoitus 6, , Ratkaisut
 Algebra I Harjoitus 6 9. 13.3.2009 Ratkaisut Algebra I Harjoitus 6 9. 13.3.2009 Ratkaisut (MV 6 sivua 1. Olkoot M ja M multiplikatiivisia monoideja. Kuvaus f : M M on monoidihomomorfismi jos 1 f(ab = f(af(b
Algebra I Harjoitus 6 9. 13.3.2009 Ratkaisut Algebra I Harjoitus 6 9. 13.3.2009 Ratkaisut (MV 6 sivua 1. Olkoot M ja M multiplikatiivisia monoideja. Kuvaus f : M M on monoidihomomorfismi jos 1 f(ab = f(af(b
Luento 6: 3-D koordinaatit
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Kertaus. x x x. K1. a) b) x 5 x 6 = x 5 6 = x 1 = 1 x, x 0. K2. a) a a a a, a > 0
 b) x 5 x 6 = x 5 6 = x 1 = 1 x, x 0. K2. a) a a a a, a > 0") Juuri 8 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 8.9.07 Kertaus K. a) 6 4 64 0, 0 0 0 0 b) 5 6 = 5 6 = =, 0 c) d) K. a) b) c) d) 4 4 4 7 4 ( ) 7 7 7 7 87 56 7 7 7 6 6 a a a, a > 0 6 6 a
Juuri 8 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 8.9.07 Kertaus K. a) 6 4 64 0, 0 0 0 0 b) 5 6 = 5 6 = =, 0 c) d) K. a) b) c) d) 4 4 4 7 4 ( ) 7 7 7 7 87 56 7 7 7 6 6 a a a, a > 0 6 6 a