Espoon N60 N2000 muunnoksena käytetään vakiosiirtokorjauksena +247 mm.
|
|
|
- Johanna Penttilä
- 9 vuotta sitten
- Katselukertoja:
Transkriptio
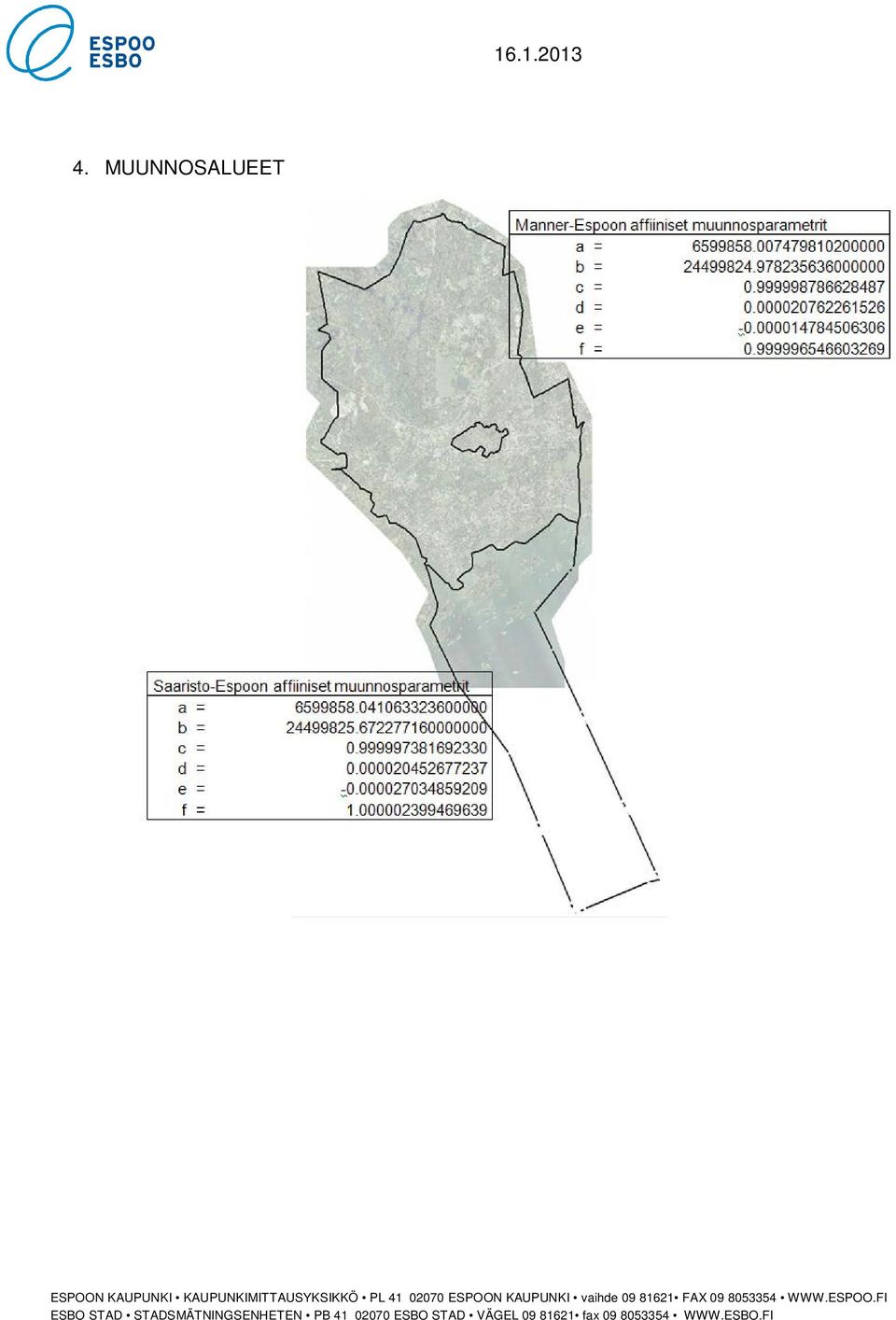
1 ESPOON MUUNNOKSET N60 N2000 ja VVJ ETRS-GK25 1. KORKEUSMUUNNOS Espoon N60 N2000 muunnoksena käytetään vakiosiirtokorjauksena +247 mm. 2. TASOKOORDINAATIT Taulukoissa esitetään Espoon viralliset muunnoskaavat Espoon vvj-koordinaattien muuntamiseksi GK-koordinaatistoon ja päinvastoin. Muunnoskaavat esitetään priorisointijärjestyksessä. Kaikki esitetyt muunnokset ovat 2D-muunnoksia. Muunnostarkkuudella tarkoitetaan muunnoksen tarkkuutta suhteessa valittuihin Ensisijaisiin muunnoksiin. Tarkkuutta vaativissa aineistomuunnoksissa on käytettävä Ensisijaisia muunnosparametrejä. Muunnoksissa Manner-Espoon GK24-muunnos & Saaristo-Espoon GK24-muunnos, Koko Espoon GK24-muunnos ja Espoon GK24 -Helmert-muunnos on lisäksi tehtävä kaistanvaihdos GK24 GK25/GK25 GK24. Kaistanvaihto tehdään JHS 154:ssa kuvattujen kaavojen avulla. Muunnoksissa Espoon suora GK25 affiininen-muunnos ja Espoon suora GK25 - Helmert-muunnos kaistanvaihdosta GK24 GK25/GK25 GK24 ei tarvita, koska kohdekoordinaatistona on GK25/vvj. Ohessa on myös kuvattu muunnosalueiden sijoittuminen Espoossa ja muunnoksien laskennassa käytetyt vastinpisteet ja näiden koordinaatit. 3. MUUNNOSKAAVAT Affiininen muunnoskaava voidaan esittää muodossa: X = a + cx + dy Y = b + ex + fy Helmert muunnoskaava voidaan esittää muodossa: X = dx + x'kcos(t 0 ) - y'ksin(t 0 ) = a + cx' - dy' Y= dy + x'ksin(t 0 ) + y'kcos(t 0 ) = b + dx' + cy' missä x'=espoon vvj X, y'= Espoon vvj Y ja t 0= kiertokulma.

2 3.1 ENSISIJAISET MUUNNOKSET Manner-Espoon GK24-muunnos Muunnostyyppi affiininen Kohdekoordinaatisto ETRS-GK24 manner-espoo Muunnosprioriteetti 1. Muunnostarkkuus 0 Muunnossuunta Espoo vvj - ETRS-GK24 ETRS-GK24 - Espoo vvj a= b= c= d= e= f= Saaristo-Espoon GK24-muunnos Muunnostyyppi affiininen Kohdekoordinaatisto ETRS-GK24 saaristo-espoo Muunnosprioriteetti 1. Muunnostarkkuus 0 Muunnossuunta Espoo vvj - ETRS-GK24 ETRS-GK24 - Espoo vvj a= b= c= d= e= f=

3 3.2 VAIHTOEHTOISET MUUNNOKSET Koko Espoon GK24-muunnos Muunnostyyppi affiininen Kohdekoordinaatisto ETRS-GK24 Espoo Muunnosprioriteetti 2. Muunnostarkkuus Pistekeskivirhe 9 mm, maksimipistevirhe 204 mm Muunnossuunta Espoo vvj - ETRS-GK24 ETRS-GK24 - Espoo vvj a= b= c= d= e= f= Espoon GK24 -Helmert-muunnos Muunnostyyppi Helmert Kohdekoordinaatisto ETRS-GK24 Espoo Muunnosprioriteetti 3. Muunnostarkkuus Pistekeskivirhe 29 mm, maksimipistevirhe 174 mm Muunnossuunta Espoo vvj - ETRS-GK24 ETRS-GK24 - Espoo vvj a= b= k= kierto= Painopisteet cx1= 79650, ,088 cy1= 39033, ,279 cx2= , ,367 cy2= , ,613 Siirrot dx= , ,323 dy= , ,915

4 Espoon suora GK25 affiininen-muunnos Muunnostyyppi affiininen Kohdekoordinaatisto ETRS-GK25 Espoo Muunnosprioriteetti 4. Muunnostarkkuus Pistekeskivirhe 56 mm, maksimipistevirhe 402 mm Muunnossuunta Espoo vvj - ETRS-GK25 ETRS-GK25 - Espoo vvj a= b= c= d= e= f= Espoon suora GK25 -Helmert-muunnos Muunnostyyppi Helmert Kohdekoordinaatisto ETRS-GK25 Espoo Muunnosprioriteetti 5. Muunnostarkkuus Pistekeskivirhe 60 mm, maksimipistevirhe 369 mm Muunnossuunta Espoo vvj - ETRS-GK25 ETRS-GK25 - Espoo vvj a= b= k= kierto= Painopisteet cx1= 79711, ,544 cy1= 38939, ,540 cx2= , ,294 cy2= , ,611 Siirrot dx= , ,991 dy= , ,744

5 4. MUUNNOSALUEET
6 5. TASOMUUNNOKSIEN VASTINPISTEET ETRS-GK24FIN ESPOO VVJ PNRO N E X Y B B B B D D D D D D D D F F F F F F F H H H H H H H H H H H J J J J J J J J J

7 J J J J J J J J J J L L L L L L L L L L L L L L L N N N N N N N N N N N N N N N N N P

8 P P P P P P P P P P P P P P R R R R R R R R R R T T T T T T T T T

9 6. TASOMUUNNOKSIEN VASTINPISTEET GK25-KOORDINAATISTOSSA B B B B D D D D D D D D F F F F F F F H H H H H H H H H H H J J J J J J J J J J J J

10 J J J J J J J L L L L L L L L L L L L L L L N N N N N N N N N N N N N N N N N P P P P P

11 P P P P P P P P P P R R R R R R R R R R T T T T T T T T T SAARISTOPISTEET Saaristomuunnoksen määrittelyssä käytettiin seuraavia pisteitä; J310 L302 N281 P304 P272 T276

Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen
 Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen Mittausten laadun tarkastus ja muunnoskertoimien laskenta Kyösti Laamanen 2.0 4.10.2013 Prosito 1 (9) SISÄLTÖ 1 YLEISTÄ...
Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen Mittausten laadun tarkastus ja muunnoskertoimien laskenta Kyösti Laamanen 2.0 4.10.2013 Prosito 1 (9) SISÄLTÖ 1 YLEISTÄ...
EUREF-FIN/N2000-MUUNNOKSET HELSINGIN KAUPUNGISSA
 1 (10) EUREF-FIN/N2000-MUUNNOKSET HELSINGIN KAUPUNGISSA 5.3.2012 2 (10) Sisältö: 1 Johdanto... 3 1.1 Muunnosasetukset paikkatieto-ohjelmistoissa... 3 1.2 Lisätiedot... 3 2 Korkeusjärjestelmän muunnos NN
1 (10) EUREF-FIN/N2000-MUUNNOKSET HELSINGIN KAUPUNGISSA 5.3.2012 2 (10) Sisältö: 1 Johdanto... 3 1.1 Muunnosasetukset paikkatieto-ohjelmistoissa... 3 1.2 Lisätiedot... 3 2 Korkeusjärjestelmän muunnos NN
ETRS-GK25 JA N2000. Uuden koordinaatti- ja korkeusjärjestelmän käyttöönotto Vantaalla. Mittausosasto Kaupunkimittausinsinööri Kimmo Junttila
 ETRS-GK25 JA N2000 Uuden koordinaatti- ja korkeusjärjestelmän käyttöönotto Vantaalla Mittausosasto Kaupunkimittausinsinööri Taitekohtia Vantaalla kolmioverkon GPS-mittaukset ja tasoitus 1990-luvulla paikallinen
ETRS-GK25 JA N2000 Uuden koordinaatti- ja korkeusjärjestelmän käyttöönotto Vantaalla Mittausosasto Kaupunkimittausinsinööri Taitekohtia Vantaalla kolmioverkon GPS-mittaukset ja tasoitus 1990-luvulla paikallinen
JUHTA - Julkisen hallinnon tietohallinnon neuvottelukunta
 JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 6: EUREF-FIN:n ja KKJ:n välinen kolmiulotteinen yhdenmuotoisuusmuunnos ja sen tarkkuus Versio: 1.0 / 3.2.2016
JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 6: EUREF-FIN:n ja KKJ:n välinen kolmiulotteinen yhdenmuotoisuusmuunnos ja sen tarkkuus Versio: 1.0 / 3.2.2016
Lahden kaupunki ja EUREF, kokemuksia 7-vuoden yhteiselosta. EUREF-päivä 2.0 4.9.2012
 Lahden kaupunki ja EUREF, kokemuksia 7-vuoden yhteiselosta EUREF-päivä 2.0 4.9.2012 ETRS-89 /EUREF-FIN muunnos Lahden kaupungissa 1. Taustaa 2. Muunnosprosessi 2.1 testaus 3. Vaikutukset toimintaympäristöön
Lahden kaupunki ja EUREF, kokemuksia 7-vuoden yhteiselosta EUREF-päivä 2.0 4.9.2012 ETRS-89 /EUREF-FIN muunnos Lahden kaupungissa 1. Taustaa 2. Muunnosprosessi 2.1 testaus 3. Vaikutukset toimintaympäristöön
Teoreettisia perusteita II
 Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
EUREF-FIN/N2000 käyttöönotto Helsingissä
 EUREF-FIN/N2000 käyttöönotto Helsingissä http://www.hel.fi/hki/kv/fi/kaupunkimittausosasto/kartat+ja+paikkatiedot/koordinaatisto Muutokset Helsngissä: Korkeusjärjestelmä: Tasokoordinaatisto: Pohjoiskoordinaatti
EUREF-FIN/N2000 käyttöönotto Helsingissä http://www.hel.fi/hki/kv/fi/kaupunkimittausosasto/kartat+ja+paikkatiedot/koordinaatisto Muutokset Helsngissä: Korkeusjärjestelmä: Tasokoordinaatisto: Pohjoiskoordinaatti
Geodeettisen laitoksen koordinaattimuunnospalvelu
 Geodeettisen laitoksen koordinaattimuunnospalvelu Janne Kovanen Geodeettinen laitos 10.3.2010 Koordinaattimuunnospalvelusta lyhyesti Ilmainen palvelu on ollut tarjolla syksystä 2008 lähtien. Web-sovellus
Geodeettisen laitoksen koordinaattimuunnospalvelu Janne Kovanen Geodeettinen laitos 10.3.2010 Koordinaattimuunnospalvelusta lyhyesti Ilmainen palvelu on ollut tarjolla syksystä 2008 lähtien. Web-sovellus
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 9: Muuttujanvaihto taso- ja avaruusintegraaleissa
 Luento 9: Muuttujanvaihto taso- ja avaruusintegraaleissa") MS-A24 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 9: Muuttujanvaihto taso- ja avaruusintegraaleissa Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 216 Antti Rasila
MS-A24 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 9: Muuttujanvaihto taso- ja avaruusintegraaleissa Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 216 Antti Rasila
EUREF ja GPS. Matti Ollikainen Geodeettinen laitos. EUREF-päivä 29.1.2004 Teknillinen korkeakoulu Espoo
 EUREF ja GPS Matti Ollikainen Geodeettinen laitos EUREF-päivä 29.1.2004 Teknillinen korkeakoulu Espoo Kuinka EUREF sai alkunsa? EUREF (European Reference Frame) o Perustettiin Kansainvälisen geodeettisen
EUREF ja GPS Matti Ollikainen Geodeettinen laitos EUREF-päivä 29.1.2004 Teknillinen korkeakoulu Espoo Kuinka EUREF sai alkunsa? EUREF (European Reference Frame) o Perustettiin Kansainvälisen geodeettisen
KOORDINAATTI- JA KORKEUSJÄRJESTELMIEN VAIHTO TURUSSA 15.2.2010
 KOORDINAATTI- JA KORKEUSJÄRJESTELMIEN VAIHTO TURUSSA 15.2.2010 Ilkka Saarimäki Kaupungingeodeetti Kiinteistöliikelaitos Kaupunkimittauspalvelut ilkka.saarimaki@turku.fi VANHAT JÄRJESTELMÄT Turun kaupungissa
KOORDINAATTI- JA KORKEUSJÄRJESTELMIEN VAIHTO TURUSSA 15.2.2010 Ilkka Saarimäki Kaupungingeodeetti Kiinteistöliikelaitos Kaupunkimittauspalvelut ilkka.saarimaki@turku.fi VANHAT JÄRJESTELMÄT Turun kaupungissa
Espoon kaupungin ulkorajojen pisteiden koordinaattimuunnos
 Sanna Kontiainen Espoon kaupungin ulkorajojen pisteiden koordinaattimuunnos o Metropolia Ammattikorkeakoulu Insinööri (AMK) Maanmittaustekniikka Insinöörityö 8.9.2015 Tiivistelmä Tekijä Otsikko Sivumäärä
Sanna Kontiainen Espoon kaupungin ulkorajojen pisteiden koordinaattimuunnos o Metropolia Ammattikorkeakoulu Insinööri (AMK) Maanmittaustekniikka Insinöörityö 8.9.2015 Tiivistelmä Tekijä Otsikko Sivumäärä
SINI- JA KOSINILAUSE. Laskentamenetelmät Geodeettinen laskenta - 1-1988-1999 M-Mies Oy
 SINI- JA KOSINILAUSE SINILAUSE: Kolmiossa kulman sinien suhde on sama kuin kulman vastaisten sivujen suhde. Toisin sanoen samassa kolmiossa SIN Kulma / Sivu = Vakio (Jos > 100 gon: Kulma = 200 kulma).
SINI- JA KOSINILAUSE SINILAUSE: Kolmiossa kulman sinien suhde on sama kuin kulman vastaisten sivujen suhde. Toisin sanoen samassa kolmiossa SIN Kulma / Sivu = Vakio (Jos > 100 gon: Kulma = 200 kulma).
Insinöörimatematiikka D
 Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
Tommi Helander. KYY-paikkatietohanke ja siihen liittyvät koordinaatistomuunnokset
 Metropolia Ammattikorkeakoulu Maanmittaustekniikan koulutusohjelma Tommi Helander KYY-paikkatietohanke ja siihen liittyvät koordinaatistomuunnokset Insinöörityö 5.5.2010 Ohjaaja: maanmittausteknikko Sami
Metropolia Ammattikorkeakoulu Maanmittaustekniikan koulutusohjelma Tommi Helander KYY-paikkatietohanke ja siihen liittyvät koordinaatistomuunnokset Insinöörityö 5.5.2010 Ohjaaja: maanmittausteknikko Sami
N2000 korkeusjärjestelmään siirtyminen Kotkan kaupungin valtuustosali 9.10.2015
 N2000 korkeusjärjestelmään siirtyminen Kotkan kaupungin valtuustosali 9.10.2015 Sisältöä: Suomessa käytössä olevat valtakunnalliset korkeusjärjestelmät Miksi N2000 - korkeusjärjestelmään siirrytään? Kotkan
N2000 korkeusjärjestelmään siirtyminen Kotkan kaupungin valtuustosali 9.10.2015 Sisältöä: Suomessa käytössä olevat valtakunnalliset korkeusjärjestelmät Miksi N2000 - korkeusjärjestelmään siirrytään? Kotkan
Sipoon kunnan EUREF-hanke. Aalto-yliopiston insinööritieteiden korkeakoulun maankäyttötieteiden laitoksella tehty diplomityö. Espoo, syyskuu 2012
 Sipoon kunnan EUREF-hanke Aalto-yliopiston insinööritieteiden korkeakoulun maankäyttötieteiden laitoksella tehty diplomityö Espoo, syyskuu 2012 Insinööri (AMK) Ville Jussila Valvoja: Professori Martin
Sipoon kunnan EUREF-hanke Aalto-yliopiston insinööritieteiden korkeakoulun maankäyttötieteiden laitoksella tehty diplomityö Espoo, syyskuu 2012 Insinööri (AMK) Ville Jussila Valvoja: Professori Martin
JHS XXX EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako
 JHS XXX EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Versio: 27.7.2015 palautekierrosta varten Julkaistu: Voimassaoloaika: toistaiseksi Sisällys 1 Johdanto... 3 2
JHS XXX EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Versio: 27.7.2015 palautekierrosta varten Julkaistu: Voimassaoloaika: toistaiseksi Sisällys 1 Johdanto... 3 2
KIINTOPISTEMITTAUKSET MML:ssa
 KIINTOPISTEMITTAUKSET MML:ssa ESITYKSEN SISÄLTÖ: Koordinaattijärjestelmän uudistus (EUREF-FIN) Korkeusjärjestelmän uudistus (N2000) MML:n tasokiintopistemittaukset MML:n korkeuskiintopistemittaukset Mittaukset
KIINTOPISTEMITTAUKSET MML:ssa ESITYKSEN SISÄLTÖ: Koordinaattijärjestelmän uudistus (EUREF-FIN) Korkeusjärjestelmän uudistus (N2000) MML:n tasokiintopistemittaukset MML:n korkeuskiintopistemittaukset Mittaukset
Uusi koordinaatti- ja korkeusjärjestelmä
 Uusi koordinaatti- ja korkeusjärjestelmä Markku Poutanen Geodeettinen laitos Uusi koordinaatti- ja korkeusjärjestelmä Taustaa Uuden koordinaattijärjestelmän perusteet JHS ja käyttöönotto Uusi korkeusjärjestelmä
Uusi koordinaatti- ja korkeusjärjestelmä Markku Poutanen Geodeettinen laitos Uusi koordinaatti- ja korkeusjärjestelmä Taustaa Uuden koordinaattijärjestelmän perusteet JHS ja käyttöönotto Uusi korkeusjärjestelmä
Paikkatietokantojen EUREFmuunnoksen
 Paikkatietokantojen EUREFmuunnoksen käytännön toteutus EUREF-II teemapäivä Jukka Vänttinen Sisältö Koordinaattimuunnokset Teklan ohjelmistoissa Muunnostyön valmistelu ja vaiheistus Muunnokset tietojärjestelmän
Paikkatietokantojen EUREFmuunnoksen käytännön toteutus EUREF-II teemapäivä Jukka Vänttinen Sisältö Koordinaattimuunnokset Teklan ohjelmistoissa Muunnostyön valmistelu ja vaiheistus Muunnokset tietojärjestelmän
Insinöörimatematiikka D
 Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi A. Lepistö alepisto@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2016 M. Hirvensalo V. Junnila A. Lepistö
Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi A. Lepistö alepisto@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2016 M. Hirvensalo V. Junnila A. Lepistö
MS-A0501 Todennäköisyyslaskennan ja tilastotieteen peruskurssi
 MS-A0501 Todennäköisyyslaskennan ja tilastotieteen peruskurssi 2A Satunnaismuuttujan odotusarvo Lasse Leskelä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Syksy 2016,
MS-A0501 Todennäköisyyslaskennan ja tilastotieteen peruskurssi 2A Satunnaismuuttujan odotusarvo Lasse Leskelä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Syksy 2016,
MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 10: Napa-, sylinteri- ja pallokoordinaatistot. Pintaintegraali.
 MS-A25/MS-A26 Differentiaali- ja integraalilaskenta 2 Luento 1: Napa-, sylinteri- ja pallokoordinaatistot. Pintaintegraali. Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät
MS-A25/MS-A26 Differentiaali- ja integraalilaskenta 2 Luento 1: Napa-, sylinteri- ja pallokoordinaatistot. Pintaintegraali. Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät
MS-A0503 Todennäköisyyslaskennan ja tilastotieteen peruskurssi
 MS-A0503 Todennäköisyyslaskennan ja tilastotieteen peruskurssi 2A Satunnaismuuttujan odotusarvo Lasse Leskelä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Lukuvuosi
MS-A0503 Todennäköisyyslaskennan ja tilastotieteen peruskurssi 2A Satunnaismuuttujan odotusarvo Lasse Leskelä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Lukuvuosi
Lahden kaupungin N2000- korkeusjärjestelmävaihdos. Petri Honkanen, Lahden kaupunki Tekninen- ja ympäristötoimiala,maankäyttö
 Lahden kaupungin N2000- korkeusjärjestelmävaihdos Miksi siirtyä N2000-järjestelmään? Maannousu Lahden seudulla maannousu 50:ssä vuodessa n. 26 cm. Kiinnostus maannousun epätasaisessa toteumassa Ongelmat
Lahden kaupungin N2000- korkeusjärjestelmävaihdos Miksi siirtyä N2000-järjestelmään? Maannousu Lahden seudulla maannousu 50:ssä vuodessa n. 26 cm. Kiinnostus maannousun epätasaisessa toteumassa Ongelmat
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta
 Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Helsingin kaupungin siirtyminen EUREF-FIN- ja N2000-järjestelmiin ja muutosten vaikutukset Staran mittaustoimintaan
 Eero Jalkanen Helsingin kaupungin siirtyminen EUREF-FIN- ja N2000-järjestelmiin ja muutosten vaikutukset Staran mittaustoimintaan Metropolia Ammattikorkeakoulu Insinööri (AMK) Maanmittaustekniikan koulutusohjelma
Eero Jalkanen Helsingin kaupungin siirtyminen EUREF-FIN- ja N2000-järjestelmiin ja muutosten vaikutukset Staran mittaustoimintaan Metropolia Ammattikorkeakoulu Insinööri (AMK) Maanmittaustekniikan koulutusohjelma
ETRS89:n ja N2000:n käyttöönotosta
 ETRS89:n ja N2000:n käyttöönotosta Esitelmän sisältö: Miksi pitäisi vaihtaa? Mihin vaihtaa? ETRS89 - koordinaattijärjestelmä N2000- korkeusjärjestelmä Uuden järjestelmän käyttöönotto Käyttöönottoprosessi
ETRS89:n ja N2000:n käyttöönotosta Esitelmän sisältö: Miksi pitäisi vaihtaa? Mihin vaihtaa? ETRS89 - koordinaattijärjestelmä N2000- korkeusjärjestelmä Uuden järjestelmän käyttöönotto Käyttöönottoprosessi
JHS 154 ETRS89-järjestelmään liittyvät karttaprojektiot, tasokoordinaatistot ja karttalehtijako
 JHS 154 ETRS89-järjestelmään liittyvät karttaprojektiot, tasokoordinaatistot ja karttalehtijako Versio: Julkaistu: Voimassaoloaika: Toistaiseksi Sisällys 1 Johdanto... 1 2 Soveltamisala... 2 3 Viittaukset...
JHS 154 ETRS89-järjestelmään liittyvät karttaprojektiot, tasokoordinaatistot ja karttalehtijako Versio: Julkaistu: Voimassaoloaika: Toistaiseksi Sisällys 1 Johdanto... 1 2 Soveltamisala... 2 3 Viittaukset...
Sallitut apuvälineet: MAOL-taulukot, kirjoitusvälineet, laskin sekä itse laadittu, A4-kokoinen lunttilappu. f(x, y) = k x y, kun 0 < y < x < 1,
 = k x y, kun 0 < y < x < 1,") Todennäköisyyslaskenta, 2. kurssikoe 7.2.22 Sallitut apuvälineet: MAOL-taulukot, kirjoitusvälineet, laskin sekä itse laadittu, A4-kokoinen lunttilappu.. Satunnaismuuttujien X ja Y yhteistiheysfunktio on
Todennäköisyyslaskenta, 2. kurssikoe 7.2.22 Sallitut apuvälineet: MAOL-taulukot, kirjoitusvälineet, laskin sekä itse laadittu, A4-kokoinen lunttilappu.. Satunnaismuuttujien X ja Y yhteistiheysfunktio on
EUREF-Teemapäivä II 04.09.2012, Tieteiden talo
 EUREF-Teemapäivä II 04.09.2012, Tieteiden talo KOORDINAATTI- JA KORKEUSJÄRJESTELMIEN VAIHTO Porissa ja Porin seudulla Kalervo Salonen / Seppo Mäkeläinen 04.09.2012 Miksi juuri nyt ( v. 2008 / syksy 2010
EUREF-Teemapäivä II 04.09.2012, Tieteiden talo KOORDINAATTI- JA KORKEUSJÄRJESTELMIEN VAIHTO Porissa ja Porin seudulla Kalervo Salonen / Seppo Mäkeläinen 04.09.2012 Miksi juuri nyt ( v. 2008 / syksy 2010
(ks. kuva) ja sen jälkeen x:n ja y:n suhteen yli xy-tasossa olevan alueen projektion G:
 ja sen jälkeen x:n ja y:n suhteen yli xy-tasossa olevan alueen projektion G:") 7 VEKTORIANALYYSI Luento 11 7. Tilavuusintegraalit A 14.5 Funktion f( xyz,, ) tilavuusintegraali yli kolmiulotteisen alueen V on raja-arvo summasta V f( xyz,, ) V kun tilavuusalkiot V =. Tarkastellaan
7 VEKTORIANALYYSI Luento 11 7. Tilavuusintegraalit A 14.5 Funktion f( xyz,, ) tilavuusintegraali yli kolmiulotteisen alueen V on raja-arvo summasta V f( xyz,, ) V kun tilavuusalkiot V =. Tarkastellaan
Luento 7: Fotogrammetrinen mittausprosessi
 7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
Satamatoiminta ja korkeusjärjestelmät
 Geodesian päivä 10.9.2014 Tieteiden talo, Helsinki Satamatoiminta ja korkeusjärjestelmät Tero Sievänen, Helsingin Satama Satamatoiminta ja korkeusjärjestelmät Tero Sievänen, Helsingin Satama q Helsingin
Geodesian päivä 10.9.2014 Tieteiden talo, Helsinki Satamatoiminta ja korkeusjärjestelmät Tero Sievänen, Helsingin Satama Satamatoiminta ja korkeusjärjestelmät Tero Sievänen, Helsingin Satama q Helsingin
Luento 4: Kiertomatriisi
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
LAHDEN KAUPUNGIN TASO- JA KORKEUSJÄRJESTELMIEN VAIHTAMINEN EUREF-FIN JA N2000-JÄRJESTELMIIN
 AALTO-YLIOPISTO Insinööritieteiden ja arkkitehtuurin tiedekunta Maanmittaustieteiden laitos LAHDEN KAUPUNGIN TASO- JA KORKEUSJÄRJESTELMIEN VAIHTAMINEN EUREF-FIN JA N2000-JÄRJESTELMIIN Aalto-yliopiston
AALTO-YLIOPISTO Insinööritieteiden ja arkkitehtuurin tiedekunta Maanmittaustieteiden laitos LAHDEN KAUPUNGIN TASO- JA KORKEUSJÄRJESTELMIEN VAIHTAMINEN EUREF-FIN JA N2000-JÄRJESTELMIIN Aalto-yliopiston
1. Kuusisivuista noppaa heitetään, kunnes saadaan silmäluku 5 tai 6. Olkoon X niiden heittojen lukumäärä, joilla tuli 1, 2, 3 tai 4.
 HY / Matematiikan ja tilastotieteen laitos Todennäköisyyslaskenta II, syksy 206 Kurssikoe 28.0.206 Ratkaisuehdotuksia. Kuusisivuista noppaa heitetään, kunnes saadaan silmäluku 5 tai 6. Olkoon X niiden
HY / Matematiikan ja tilastotieteen laitos Todennäköisyyslaskenta II, syksy 206 Kurssikoe 28.0.206 Ratkaisuehdotuksia. Kuusisivuista noppaa heitetään, kunnes saadaan silmäluku 5 tai 6. Olkoon X niiden
w + x + y + z =4, wx + wy + wz + xy + xz + yz =2, wxy + wxz + wyz + xyz = 4, wxyz = 1.
 Kotitehtävät, tammikuu 2011 Vaikeampi sarja 1. Ratkaise yhtälöryhmä w + x + y + z =4, wx + wy + wz + xy + xz + yz =2, wxy + wxz + wyz + xyz = 4, wxyz = 1. Ratkaisu. Yhtälöryhmän ratkaisut (w, x, y, z)
Kotitehtävät, tammikuu 2011 Vaikeampi sarja 1. Ratkaise yhtälöryhmä w + x + y + z =4, wx + wy + wz + xy + xz + yz =2, wxy + wxz + wyz + xyz = 4, wxyz = 1. Ratkaisu. Yhtälöryhmän ratkaisut (w, x, y, z)
Insinöörimatematiikka D
 Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
Valkeakosken kaupungin mittaustoimi. 17.3.2010 Jani Kiiskilä
 Valkeakosken kaupungin mittaustoimi 17.3.2010 Jani Kiiskilä Esityksen sisältö Yleistä Valkeakoskesta Maankäytön ja maa- ja mittaustoimen esittely Mittaustoimessa ajankohtaista Valkeakoski Asukasluku 1.1.2010
Valkeakosken kaupungin mittaustoimi 17.3.2010 Jani Kiiskilä Esityksen sisältö Yleistä Valkeakoskesta Maankäytön ja maa- ja mittaustoimen esittely Mittaustoimessa ajankohtaista Valkeakoski Asukasluku 1.1.2010
Ellipsit, hyperbelit ja paraabelit vinossa
 Ellipsit, hyperbelit ja paraabelit vinossa Matti Lehtinen 1 Ellipsi, hyperbeli ja paraabeli suorassa Opimme lukion analyyttisen geometrian kurssilla ainakin, jos kävimme lukiota vielä muutama vuosi sitten
Ellipsit, hyperbelit ja paraabelit vinossa Matti Lehtinen 1 Ellipsi, hyperbeli ja paraabeli suorassa Opimme lukion analyyttisen geometrian kurssilla ainakin, jos kävimme lukiota vielä muutama vuosi sitten
Osoita, että kaikki paraabelit ovat yhdenmuotoisia etsimällä skaalauskuvaus, joka vie paraabelin y = ax 2 paraabelille y = bx 2. VASTAUS: , b = 2 2
 8. Geometriset kuvaukset 8.1. Euklidiset kuvaukset 344. Esitä muodossa x = Ax + b se avaruuden E 3 peilauskuvaus, jonka symmetriatasona on x 1 3x + x 3 = 6. A = 1 3 6 6 3, b = 1 1 18. 3 6 6 345. Tason
8. Geometriset kuvaukset 8.1. Euklidiset kuvaukset 344. Esitä muodossa x = Ax + b se avaruuden E 3 peilauskuvaus, jonka symmetriatasona on x 1 3x + x 3 = 6. A = 1 3 6 6 3, b = 1 1 18. 3 6 6 345. Tason
ELEC C4140 Kenttäteoria (syksy 2015)
") ELEC C4140 Kenttäteoria (syksy 2015) Henrik Wallén Luentoviiko 3 / versio 23. syyskuuta 2015 Vektorianalyysi (Ulaby, luku 3) Koordinaatistot Viiva-, pinta- ja tilavuusalkiot Koordinaattimuunnokset Nablaoperaatiot
ELEC C4140 Kenttäteoria (syksy 2015) Henrik Wallén Luentoviiko 3 / versio 23. syyskuuta 2015 Vektorianalyysi (Ulaby, luku 3) Koordinaatistot Viiva-, pinta- ja tilavuusalkiot Koordinaattimuunnokset Nablaoperaatiot
Marko Nieminen. Jämsän kaupungin EUREF-FIN- ja N2000-järjestelmien muunnosprojektin tarkastusmittaukset
 Marko Nieminen Jämsän kaupungin EUREF-FIN- ja N2000-järjestelmien muunnosprojektin tarkastusmittaukset Metropolia Ammattikorkeakoulu Insinööri (AMK) Maanmittaustekniikan tutkinto-ohjelma Insinöörityö 21.5.2015
Marko Nieminen Jämsän kaupungin EUREF-FIN- ja N2000-järjestelmien muunnosprojektin tarkastusmittaukset Metropolia Ammattikorkeakoulu Insinööri (AMK) Maanmittaustekniikan tutkinto-ohjelma Insinöörityö 21.5.2015
JHS 196 EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa
 JHS 196 EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa JHS 197 EUREF-FIN - koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako MARKKU POUTANEN Paikkatietokeskus FGI Taustaa
JHS 196 EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa JHS 197 EUREF-FIN - koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako MARKKU POUTANEN Paikkatietokeskus FGI Taustaa
Insinöörimatematiikka D
 Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi A. Lepistö alepisto@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2016 M. Hirvensalo V. Junnila A. Lepistö
Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi A. Lepistö alepisto@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2016 M. Hirvensalo V. Junnila A. Lepistö
Sallitut apuvälineet: kirjoitusvälineet, laskin sekä käsinkirjoitettu, A4-kokoinen lunttilappu ja MAOL taulukkokirjaa
 Matematiikan ja tilastotieteen laitos Todennäköisyyslaskenta II. kurssikoe 18.1.15 Sallitut apuvälineet: kirjoitusvälineet, laskin sekä käsinkirjoitettu, A4-kokoinen lunttilappu ja MAOL taulukkokirjaa
Matematiikan ja tilastotieteen laitos Todennäköisyyslaskenta II. kurssikoe 18.1.15 Sallitut apuvälineet: kirjoitusvälineet, laskin sekä käsinkirjoitettu, A4-kokoinen lunttilappu ja MAOL taulukkokirjaa
Johdatus tn-laskentaan perjantai 17.2.2012
 Johdatus tn-laskentaan perjantai 17.2.2012 Kahden diskreetin muuttujan yhteisjakauma On olemassa myös monen muuttujan yhteisjakauma, ja jatkuvien muuttujien yhteisjakauma (jota ei käsitellä tällä kurssilla;
Johdatus tn-laskentaan perjantai 17.2.2012 Kahden diskreetin muuttujan yhteisjakauma On olemassa myös monen muuttujan yhteisjakauma, ja jatkuvien muuttujien yhteisjakauma (jota ei käsitellä tällä kurssilla;
Kirkkonummen kunnan taso- ja korkeusjärjestelmien muuntaminen EUREF-FIN- ja N2000- järjestelmiin
 Markku Korhonen Kirkkonummen kunnan taso- ja korkeusjärjestelmien muuntaminen EUREF-FIN- ja N2000- järjestelmiin Metropolia Ammattikorkeakoulu Insinööri (ylempi AMK) Rakentamisen koulutusohjelma, maanmittauksen
Markku Korhonen Kirkkonummen kunnan taso- ja korkeusjärjestelmien muuntaminen EUREF-FIN- ja N2000- järjestelmiin Metropolia Ammattikorkeakoulu Insinööri (ylempi AMK) Rakentamisen koulutusohjelma, maanmittauksen
0 3 y4 dy = 3 y. 15x 2 ydx = 15. f Y (y) = 5y 4 1{0 y 1}.
 = 5y 4 1{0 y 1}.") HY, MTL / Matemaattisten tieteiden kandiohjelma Todennäköisyyslaskenta IIb, syksy 18 Harjoitus Ratkaisuehdotuksia Tehtäväsar I 1. Satunnaismuuttujilla X Y on tkuva yhteiskauma yhteistiheysfunktiolla f
HY, MTL / Matemaattisten tieteiden kandiohjelma Todennäköisyyslaskenta IIb, syksy 18 Harjoitus Ratkaisuehdotuksia Tehtäväsar I 1. Satunnaismuuttujilla X Y on tkuva yhteiskauma yhteistiheysfunktiolla f
Maanmittauspäivät 2014 Seinäjoki
 Maanmittauspäivät 2014 Seinäjoki Parempaa tarkkuutta satelliittimittauksille EUREF/N2000 - järjestelmissä Ympäristösi parhaat tekijät 2 EUREF koordinaattijärjestelmän käyttöön otto on Suomessa sujunut
Maanmittauspäivät 2014 Seinäjoki Parempaa tarkkuutta satelliittimittauksille EUREF/N2000 - järjestelmissä Ympäristösi parhaat tekijät 2 EUREF koordinaattijärjestelmän käyttöön otto on Suomessa sujunut
Mittaushavaintojen täsmällinen käsittelymenenetelmä
 Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
MAT Todennäköisyyslaskenta Tentti / Kimmo Vattulainen
 MAT-5 Todennäköisyyslaskenta Tentti.. / Kimmo Vattulainen Vastaa jokainen tehtävä eri paperille. Funktiolaskin sallittu.. a) P A). ja P A B).6. Mitä on P A B), kun A ja B ovat riippumattomia b) Satunnaismuuttujan
MAT-5 Todennäköisyyslaskenta Tentti.. / Kimmo Vattulainen Vastaa jokainen tehtävä eri paperille. Funktiolaskin sallittu.. a) P A). ja P A B).6. Mitä on P A B), kun A ja B ovat riippumattomia b) Satunnaismuuttujan
Radiotekniikan sovelluksia
 Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
Muutoksen arviointi differentiaalin avulla
 Muutoksen arviointi differentiaalin avulla y y = f (x) y = f (x + x) f (x) dy y dy = f (x) x x x x x + x Luento 7 1 of 15 Matematiikan ja tilastotieteen laitos Turun yliopisto Muutoksen arviointi differentiaalin
Muutoksen arviointi differentiaalin avulla y y = f (x) y = f (x + x) f (x) dy y dy = f (x) x x x x x + x Luento 7 1 of 15 Matematiikan ja tilastotieteen laitos Turun yliopisto Muutoksen arviointi differentiaalin
EUREF-koordinaatistomuunnosprojektin tarkastusmittaukset Espoon kuntarajalla
 Ossi Valta EUREF-koordinaatistomuunnosprojektin tarkastusmittaukset Espoon kuntarajalla Metropolia Ammattikorkeakoulu Insinööri (AMK) Maanmittaustekniikan koulutusohjelma Insinöörityö 16.11.2012 Tiivistelmä
Ossi Valta EUREF-koordinaatistomuunnosprojektin tarkastusmittaukset Espoon kuntarajalla Metropolia Ammattikorkeakoulu Insinööri (AMK) Maanmittaustekniikan koulutusohjelma Insinöörityö 16.11.2012 Tiivistelmä
Palautekooste: JHS XXX EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako (korvaa JHS 154-suosituksen)
") Palautekooste: JHS XXX EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako (korvaa JHS 154-suosituksen) 1. Organisaatio Vastaajien määrä: 9 - Työ- ja elinkeinoministeriö
Palautekooste: JHS XXX EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako (korvaa JHS 154-suosituksen) 1. Organisaatio Vastaajien määrä: 9 - Työ- ja elinkeinoministeriö
Luento 2 Stereokuvan laskeminen. 2008 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Q 17.1/06/71/2. GEOLOGINEN TUTKIMUSLAITOS Geofysiikan osasto. Juha Korhonen HP-ohJ el mase l oste
 Q 17.1/06/71/2 Juha Korhonen 1.4.1971 GEOLOGINEN TUTKIMUSLAITOS Geofysiikan osasto HP-ohJ el mase l oste SUORAVI IVAISTEN KOORDINAATTIEN MUUNTAMINEN MAANTIETEELLISIKSI OHJELMASELOSTE TRANSFORFAAT I ON
Q 17.1/06/71/2 Juha Korhonen 1.4.1971 GEOLOGINEN TUTKIMUSLAITOS Geofysiikan osasto HP-ohJ el mase l oste SUORAVI IVAISTEN KOORDINAATTIEN MUUNTAMINEN MAANTIETEELLISIKSI OHJELMASELOSTE TRANSFORFAAT I ON
Keravan kaupungin runkopisteverkon saneeraus
 Metropolia Ammattikorkeakoulu Maanmittaustekniikan koulutusohjelma Tero Piirainen Keravan kaupungin runkopisteverkon saneeraus Insinöörityö 4.5.2009 Ohjaaja: DI Jukka Hakala Ohjaava opettaja: yliopettaja
Metropolia Ammattikorkeakoulu Maanmittaustekniikan koulutusohjelma Tero Piirainen Keravan kaupungin runkopisteverkon saneeraus Insinöörityö 4.5.2009 Ohjaaja: DI Jukka Hakala Ohjaava opettaja: yliopettaja
14 Monikulmiot 1. Nimeä monikulmio. a) b) c) Laske monikulmion piiri. a) 30,8 cm 18,2 cm. Laske sivun x pituus, kun monikulmion piiri on 25,0 cm.
 b) c) Laske monikulmion piiri. a) 30,8 cm 18,2 cm. Laske sivun x pituus, kun monikulmion piiri on 25,0 cm.") 1 14 Monikulmiot Nimeä monikulmio. a) b) c) kolmio nelikulmio 12-kulmio Laske monikulmion piiri. a) 4,2 cm b) 3,6 cm 11,2 cm 4,8 cm 3,6 cm 4,3 cm 30,8 cm 18,2 cm Laske sivun x pituus, kun monikulmion piiri
1 14 Monikulmiot Nimeä monikulmio. a) b) c) kolmio nelikulmio 12-kulmio Laske monikulmion piiri. a) 4,2 cm b) 3,6 cm 11,2 cm 4,8 cm 3,6 cm 4,3 cm 30,8 cm 18,2 cm Laske sivun x pituus, kun monikulmion piiri
= ( 1) 2 u tt (x, t) = u tt (x, t)
 2 u tt (x, t) = u tt (x, t)") Harjoitukset 6, syksy 017 1. Osoita, ettei ajan suunnalla ole merkitystä aaltoyhtälössä: Jos u on ratkaisu, niin U(x, t) = u(x, t) on myös ratkaisu (toisin kuin lämpöyhtälön tapauksessa). Todistus. Funktion
Harjoitukset 6, syksy 017 1. Osoita, ettei ajan suunnalla ole merkitystä aaltoyhtälössä: Jos u on ratkaisu, niin U(x, t) = u(x, t) on myös ratkaisu (toisin kuin lämpöyhtälön tapauksessa). Todistus. Funktion
Satunnaismuuttujien muunnokset ja niiden jakaumat
 Ilkka Mellin Todennäköisyyslaskenta Osa 2: Satunnaismuuttujat ja todennäköisyysjakaumat Satunnaismuuttujien muunnokset ja niiden jakaumat TKK (c) Ilkka Mellin (2007) 1 Satunnaismuuttujien muunnokset ja
Ilkka Mellin Todennäköisyyslaskenta Osa 2: Satunnaismuuttujat ja todennäköisyysjakaumat Satunnaismuuttujien muunnokset ja niiden jakaumat TKK (c) Ilkka Mellin (2007) 1 Satunnaismuuttujien muunnokset ja
= ( F dx F dy F dz).
.") 17 VEKTORIANALYYSI Luento 2 3.4 Vektorikentän käyräintegraali Voiman tekemä työ on matka (d) kertaa voiman (F) projektio liikkeen suunnassa, yksinkertaisimmillaan W Fd. Jos liike tapahtuu käyrää pitkin
17 VEKTORIANALYYSI Luento 2 3.4 Vektorikentän käyräintegraali Voiman tekemä työ on matka (d) kertaa voiman (F) projektio liikkeen suunnassa, yksinkertaisimmillaan W Fd. Jos liike tapahtuu käyrää pitkin
Valtakunnallinen N60 N2000-muunnos
 32 Valtakunnallinen N60 N2000-muunnos Maanmittaus 86:2 (2011) Geodesian tietoisku Valtakunnallinen N60 N2000-muunnos Mikko Ahola ja Matti Musto mikko.ahola@hel.fi matti.musto@maanmittauslaitos.fi 1 Johdanto
32 Valtakunnallinen N60 N2000-muunnos Maanmittaus 86:2 (2011) Geodesian tietoisku Valtakunnallinen N60 N2000-muunnos Mikko Ahola ja Matti Musto mikko.ahola@hel.fi matti.musto@maanmittauslaitos.fi 1 Johdanto
Insinöörimatematiikka D
 Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
VIRTAIN KAUPUNGIN MUUNNOSVAIHTOEHDOT EUREF-FIN- JA N2000-JÄRJESTELMIIN SIIRTYMISEKSI
 OPINNÄYTETYÖ ANTTI VÄÄTÄINEN 2010 VIRTAIN KAUPUNGIN MUUNNOSVAIHTOEHDOT EUREF-FIN- JA N2000-JÄRJESTELMIIN SIIRTYMISEKSI MAANMITTAUSTEKNIIKKA ROVANIEMEN AMMATTIKORKEAKOULU TEKNIIKAN JA LIIKENTEEN ALA Maanmittaustekniikka
OPINNÄYTETYÖ ANTTI VÄÄTÄINEN 2010 VIRTAIN KAUPUNGIN MUUNNOSVAIHTOEHDOT EUREF-FIN- JA N2000-JÄRJESTELMIIN SIIRTYMISEKSI MAANMITTAUSTEKNIIKKA ROVANIEMEN AMMATTIKORKEAKOULU TEKNIIKAN JA LIIKENTEEN ALA Maanmittaustekniikka
Matemaattinen Analyysi
 Vaasan yliopisto, syksy 2016 / ORMS1010 Matemaattinen Analyysi 8. harjoitus, viikko 49 R1 to 12 14 F453 (8.12.) R2 to 14 16 F345 (8.12.) R3 ke 8 10 F345 (7.11.) 1. Määritä funktion f (x) = 1 Taylorin sarja
Vaasan yliopisto, syksy 2016 / ORMS1010 Matemaattinen Analyysi 8. harjoitus, viikko 49 R1 to 12 14 F453 (8.12.) R2 to 14 16 F345 (8.12.) R3 ke 8 10 F345 (7.11.) 1. Määritä funktion f (x) = 1 Taylorin sarja
Fr ( ) Fxyz (,, ), täytyy integroida:
 Fxyz (,, ), täytyy integroida:") 15 VEKTORIANALYYSI Luento Vektorikentän käyräintegraali Voiman tekemä työ on matka (d) kertaa voiman (F) projektio liikkeen suunnassa, yksinkertaisimmillaan W Fd. Jos liike tapahtuu käyrää pitkin ja voima
15 VEKTORIANALYYSI Luento Vektorikentän käyräintegraali Voiman tekemä työ on matka (d) kertaa voiman (F) projektio liikkeen suunnassa, yksinkertaisimmillaan W Fd. Jos liike tapahtuu käyrää pitkin ja voima
JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit
 JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit Versio: 1.0 Julkaistu: 6.9.2019 Voimassaoloaika: toistaiseksi 1 FIN2005N00 1.1 Mallin luonti ja tarkkuus FIN2005N00 on korkeusmuunnospinta,
JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit Versio: 1.0 Julkaistu: 6.9.2019 Voimassaoloaika: toistaiseksi 1 FIN2005N00 1.1 Mallin luonti ja tarkkuus FIN2005N00 on korkeusmuunnospinta,
Osoita, että eksponenttifunktio ja logaritmifunktio ovat differentiaaliyhtälön
 3. Lineaariset differentiaaliyhtälöt 3.1. Lineaariyhtälöiden teoriaa 99. Onko differentiaaliyhtälö y + x(y y )=y + 1 a) lineaarinen, b) homogeeninen? 100. Olkoot funktiot f (x) ja g(x) jatkuvasti derivoituvia
3. Lineaariset differentiaaliyhtälöt 3.1. Lineaariyhtälöiden teoriaa 99. Onko differentiaaliyhtälö y + x(y y )=y + 1 a) lineaarinen, b) homogeeninen? 100. Olkoot funktiot f (x) ja g(x) jatkuvasti derivoituvia
Johdatus todennäköisyyslaskentaan Satunnaismuuttujien muunnokset ja niiden jakaumat. TKK (c) Ilkka Mellin (2004) 1
 Ilkka Mellin (2004) 1") Johdatus todennäköisyyslaskentaan Satunnaismuuttujien muunnokset ja niiden jakaumat TKK (c) Ilkka Mellin (2004) 1 Satunnaismuuttujien muunnokset ja niiden jakaumat Satunnaismuuttujien muunnosten jakaumat
Johdatus todennäköisyyslaskentaan Satunnaismuuttujien muunnokset ja niiden jakaumat TKK (c) Ilkka Mellin (2004) 1 Satunnaismuuttujien muunnokset ja niiden jakaumat Satunnaismuuttujien muunnosten jakaumat
Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia
 Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa 1 / 31 Luennon sisältö Suhteellinen translaatioliike
Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa 1 / 31 Luennon sisältö Suhteellinen translaatioliike
Satunnaismuuttujan odotusarvo ja laskusäännöt
 Luku 3 Satunnaismuuttujan odotusarvo ja laskusäännöt Lasse Leskelä Aalto-yliopisto 16. syyskuuta 2017 3.1 Odotusarvon käsite ja suurten lukujen laki Lukuarvoisen satunnaismuuttujan X odotusarvo määritellään
Luku 3 Satunnaismuuttujan odotusarvo ja laskusäännöt Lasse Leskelä Aalto-yliopisto 16. syyskuuta 2017 3.1 Odotusarvon käsite ja suurten lukujen laki Lukuarvoisen satunnaismuuttujan X odotusarvo määritellään
Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia
 Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Pyörimisliikkeestä Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia Luennon sisältö Suhteellinen translaatioliike
Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Pyörimisliikkeestä Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia Luennon sisältö Suhteellinen translaatioliike
Symmetrioiden tutkiminen GeoGebran avulla
 Symmetrioiden tutkiminen GeoGebran avulla Tutustutaan esimerkkien kautta siihen, miten geometrista symmetriaa voidaan tutkia ja havainnollistaa GeoGebran avulla: peilisymmetria: peilaus pisteen ja suoran
Symmetrioiden tutkiminen GeoGebran avulla Tutustutaan esimerkkien kautta siihen, miten geometrista symmetriaa voidaan tutkia ja havainnollistaa GeoGebran avulla: peilisymmetria: peilaus pisteen ja suoran
2. Tavallisen differentiaaliyhtälön yleisiä ratkaisumenetelmiä. y = 2xy, Piirrä muutama yleisen ratkaisun kuvaaja. Minkä nimisistä käyristä on kyse?
 2. Tavallisen differentiaaliyhtälön yleisiä ratkaisumenetelmiä 2.1. Ensimmäisen kertaluvun yhtälöt 30. Ratkaise alkuarvotehtävä y = 2xy, y(0)=1. Piirrä muutama yleisen ratkaisun kuvaaja. Minkä nimisistä
2. Tavallisen differentiaaliyhtälön yleisiä ratkaisumenetelmiä 2.1. Ensimmäisen kertaluvun yhtälöt 30. Ratkaise alkuarvotehtävä y = 2xy, y(0)=1. Piirrä muutama yleisen ratkaisun kuvaaja. Minkä nimisistä
Normaaliryhmä. Toisen kertaluvun normaaliryhmä on yleistä muotoa
 Normaaliryhmä Toisen kertaluvun normaaliryhmä on yleistä muotoa x = u(t,x,y), y t I, = v(t,x,y), Funktiot u = u(t,x,y), t I ja v = v(t,x,y), t I ovat tunnettuja Toisen kertaluvun normaaliryhmän ratkaisu
Normaaliryhmä Toisen kertaluvun normaaliryhmä on yleistä muotoa x = u(t,x,y), y t I, = v(t,x,y), Funktiot u = u(t,x,y), t I ja v = v(t,x,y), t I ovat tunnettuja Toisen kertaluvun normaaliryhmän ratkaisu
Talousmatematiikan perusteet: Luento 17. Osittaisintegrointi Sijoitusmenettely
 Talousmatematiikan perusteet: Luento 17 Osittaisintegrointi Sijoitusmenettely Motivointi Viime luennolla käsittelimme integroinnin perussääntöjä: Vakiolla kerrotun funktion integrointi: af x dx = a f x
Talousmatematiikan perusteet: Luento 17 Osittaisintegrointi Sijoitusmenettely Motivointi Viime luennolla käsittelimme integroinnin perussääntöjä: Vakiolla kerrotun funktion integrointi: af x dx = a f x
a) Mikä on integraalifunktio ja miten derivaatta liittyy siihen? Anna esimerkki. 8 3 + 4 2 0 = 16 3 = 3 1 3.
 Mikä on integraalifunktio ja miten derivaatta liittyy siihen? Anna esimerkki. 8 3 + 4 2 0 = 16 3 = 3 1 3.") Integraalilaskenta. a) Mikä on integraalifunktio ja miten derivaatta liittyy siihen? Anna esimerkki. b) Mitä määrätty integraali tietyllä välillä x tarkoittaa? Vihje: * Integraali * Määrätyn integraalin
Integraalilaskenta. a) Mikä on integraalifunktio ja miten derivaatta liittyy siihen? Anna esimerkki. b) Mitä määrätty integraali tietyllä välillä x tarkoittaa? Vihje: * Integraali * Määrätyn integraalin
Koordinaattijärjestelmä Koordinaatisto Karttaprojektio
 Koordinaattijärjestelmä Koordinaatisto Karttaprojektio Koordinaattijärjestelmä sisältää määritelmät, koordinaatisto on sen realisaatio maastossa ja karttaprojektio tämän esitysmuoto kaksiulotteisella kartalla
Koordinaattijärjestelmä Koordinaatisto Karttaprojektio Koordinaattijärjestelmä sisältää määritelmät, koordinaatisto on sen realisaatio maastossa ja karttaprojektio tämän esitysmuoto kaksiulotteisella kartalla
(1.1) Ae j = a k,j e k.
 Ae j = a k,j e k.") Lineaarikuvauksen determinantti ja jälki 1. Lineaarikuvauksen matriisi. Palautetaan mieleen, mikä lineaarikuvauksen matriisi annetun kannan suhteen on. Olkoot V äärellisulotteinen vektoriavaruus, n = dim
Lineaarikuvauksen determinantti ja jälki 1. Lineaarikuvauksen matriisi. Palautetaan mieleen, mikä lineaarikuvauksen matriisi annetun kannan suhteen on. Olkoot V äärellisulotteinen vektoriavaruus, n = dim
4 Korkeamman kertaluvun differentiaaliyhtälöt
 Differentiaaliyhtälöt c Pekka Alestalo 2015 Tässä monisteessa käydään läpi tavallisiin differentiaaliyhtälöihin liittyviä peruskäsitteitä ja ratkaisuperiaatteita. Luennolla lasketaan esimerkkitehtäviä
Differentiaaliyhtälöt c Pekka Alestalo 2015 Tässä monisteessa käydään läpi tavallisiin differentiaaliyhtälöihin liittyviä peruskäsitteitä ja ratkaisuperiaatteita. Luennolla lasketaan esimerkkitehtäviä
Diskreetin satunnaismuuttujan odotusarvo, keskihajonta ja varianssi
 TOD.NÄK JA TILASTOT, MAA0 Diskreetin satunnaismuuttujan odotusarvo, keskihajonta ja varianssi Kuten tilastojakaumia voitiin esittää tunnuslukujen (keskiarvo, moodi, mediaani, jne.) avulla, niin vastaavasti
TOD.NÄK JA TILASTOT, MAA0 Diskreetin satunnaismuuttujan odotusarvo, keskihajonta ja varianssi Kuten tilastojakaumia voitiin esittää tunnuslukujen (keskiarvo, moodi, mediaani, jne.) avulla, niin vastaavasti
Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 13.10.2004) Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus AIHEITA Stereomittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 13.10.2004) Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus AIHEITA Stereomittaus
Ratkaisu: (i) Joukko A X on avoin jos kaikilla x A on olemassa r > 0 siten että B(x, r) A. Joukko B X on suljettu jos komplementti B c on avoin.
 Joukko A X on avoin jos kaikilla x A on olemassa r > 0 siten että B(x, r) A. Joukko B X on suljettu jos komplementti B c on avoin.") Matematiikan ja tilastotieteen laitos Topologia I 1. kurssikoe 26.2.2013 Malliratkaisut ja tehtävien tarkastamiset Tehtävät 1 ja 2 Henrik Wirzenius Tehtävät 3 ja 4 Teemu Saksala Jos sinulla on kysyttävää
Matematiikan ja tilastotieteen laitos Topologia I 1. kurssikoe 26.2.2013 Malliratkaisut ja tehtävien tarkastamiset Tehtävät 1 ja 2 Henrik Wirzenius Tehtävät 3 ja 4 Teemu Saksala Jos sinulla on kysyttävää
Täydennetään ja kerrataan Fitzpatrickin lukujen 18 ja 19 esitystä.
 1 Laaja matematiikka 5 Kevät 009 Integrointi n-ulotteisessa avaruudessa Täydennetään ja kerrataan Fitzpatrickin lukujen 18 ja 19 esitystä. Tasointegraali Tasointegraali f voidaan laskea kaksinkertaisena
1 Laaja matematiikka 5 Kevät 009 Integrointi n-ulotteisessa avaruudessa Täydennetään ja kerrataan Fitzpatrickin lukujen 18 ja 19 esitystä. Tasointegraali Tasointegraali f voidaan laskea kaksinkertaisena
RAKENNETTUJEN VESIHUOLTOLINJOJEN MAASTOKARTOITUSOHJE ESPOO JA KAUNIAINEN
 1 (6) RAKENNETTUJEN VESIHUOLTOLINJOJEN MAASTOKARTOITUSOHJE ESPOO JA KAUNIAINEN HSY siirtyy uusiin taso- ja korkeusjärjestelmiin 1.12.2012 yhtä aikaa pääkaupunkiseudun kaupunkien kanssa. Espoon ja Kauniaisten
1 (6) RAKENNETTUJEN VESIHUOLTOLINJOJEN MAASTOKARTOITUSOHJE ESPOO JA KAUNIAINEN HSY siirtyy uusiin taso- ja korkeusjärjestelmiin 1.12.2012 yhtä aikaa pääkaupunkiseudun kaupunkien kanssa. Espoon ja Kauniaisten
ja B = 2 1 a) A + B, b) AB, c) BA, d) A 2, e) A T, f) A T B, g) 3A (e) A =
 A + B, b) AB, c) BA, d) A 2, e) A T, f) A T B, g) 3A (e) A =") Matematiikan perusteet taloustieteilijöille II Harjoituksia kevät 211 1. Olkoon A = Määrää ( 2 1 ) 3 4 1 ja B = 2 1 6 3 1 a) A + B, b) AB, c) BA, d) A 2, e) A T, f) A T B, g) 3A. 2. Laske seuraavat determinantit
Matematiikan perusteet taloustieteilijöille II Harjoituksia kevät 211 1. Olkoon A = Määrää ( 2 1 ) 3 4 1 ja B = 2 1 6 3 1 a) A + B, b) AB, c) BA, d) A 2, e) A T, f) A T B, g) 3A. 2. Laske seuraavat determinantit
Matemaattisten tieteiden kandiohjelma / MTL Todennäköisyyslaskenta IIb Kurssikoe (kesto 2h 30 min)
") Matemaattisten tieteiden kandiohjelma / MTL Todennäköisyyslaskenta IIb Kurssikoe 8..7 (kesto h 3 min) Sallitut apuvälineet: kirjoitusvälineet, laskin sekä käsinkirjoitettu, A4-kokoinen lunttilappu. Ei
Matemaattisten tieteiden kandiohjelma / MTL Todennäköisyyslaskenta IIb Kurssikoe 8..7 (kesto h 3 min) Sallitut apuvälineet: kirjoitusvälineet, laskin sekä käsinkirjoitettu, A4-kokoinen lunttilappu. Ei
Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia
 Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Pyörimisliikkeestä Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa Konseptitesti 1 Kysymys
Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Pyörimisliikkeestä Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa Konseptitesti 1 Kysymys
Insinöörimatematiikka D
 Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi A. Lepistö alepisto@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2016 M. Hirvensalo V. Junnila A. Lepistö
Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi A. Lepistö alepisto@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2016 M. Hirvensalo V. Junnila A. Lepistö
Opetettavien aineitten patevyyskoodisto
 Opetettavien aineitten patevyyskoodisto aa ab ac ad ae af ag ah ai aj ak al am an ao jp jq jr js jt ju jv jw jx jy jz ka kb kc kd as at au av aw ax Suomen kieli, 60 op. Suomen kieli, 120 op. Suomen kieli,
Opetettavien aineitten patevyyskoodisto aa ab ac ad ae af ag ah ai aj ak al am an ao jp jq jr js jt ju jv jw jx jy jz ka kb kc kd as at au av aw ax Suomen kieli, 60 op. Suomen kieli, 120 op. Suomen kieli,
Insinöörimatematiikka D
 Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
ja B = 2 1 a) A + B, b) AB, c) BA, d) A 2, e) A T, f) A T B, g) 3A (e)
 A + B, b) AB, c) BA, d) A 2, e) A T, f) A T B, g) 3A (e)") Matematiikan perusteet taloustieteilijöille II Harjoituksia kevät 214 1. Tutki seuraavia jonoja a) (a n )=(3n 1) ( ) 2 b) (a n )= 3 n ( ) 1 c) (a n )= (n + 1)(n +2) 2. Tutki seuraavia sarjoja a) (3k 1)
Matematiikan perusteet taloustieteilijöille II Harjoituksia kevät 214 1. Tutki seuraavia jonoja a) (a n )=(3n 1) ( ) 2 b) (a n )= 3 n ( ) 1 c) (a n )= (n + 1)(n +2) 2. Tutki seuraavia sarjoja a) (3k 1)
JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 2: Projektiokaavat
 JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 2: Projektiokaavat Versio: 1.0 / 5.2.2016 Julkaistu: 5.4.2016 Voimassaoloaika: toistaiseksi Sisällys 1
JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 2: Projektiokaavat Versio: 1.0 / 5.2.2016 Julkaistu: 5.4.2016 Voimassaoloaika: toistaiseksi Sisällys 1
4. Anna arviosi seuraavista suositusluonnokseen liittyvistä väitteistä asteikolla 1-5 (5 = samaa mieltä, 1 = eri mieltä)
") kooste ja työryhmän vastine: JHS XXX EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako (korvaa JHS 154-suosituksen) 1. Organisaatio Vastaajien määrä: 9 - Työ- ja elinkeinoministeriö
kooste ja työryhmän vastine: JHS XXX EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako (korvaa JHS 154-suosituksen) 1. Organisaatio Vastaajien määrä: 9 - Työ- ja elinkeinoministeriö
Luento 3: 3D katselu. Sisältö
 Tietokonegrafiikan perusteet T-.43 3 op Luento 3: 3D katselu Lauri Savioja Janne Kontkanen /27 3D katselu / Sisältö Kertaus: koordinaattimuunnokset ja homogeeniset koordinaatit Näkymänmuodostus Kameran
Tietokonegrafiikan perusteet T-.43 3 op Luento 3: 3D katselu Lauri Savioja Janne Kontkanen /27 3D katselu / Sisältö Kertaus: koordinaattimuunnokset ja homogeeniset koordinaatit Näkymänmuodostus Kameran