ROBOTIIKKA SISÄLLYSLUETTELO:
|
|
|
- Tiina Halonen
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
1 ROBOTIIKKA SISÄLLYSLUETTELO: 1. JOHDANTO JA HISTORIAA ROBOTTITYYPIT JA RAKENTEET Yleistä Robottityypit ja rakenteet Suorakulmaiset robotit Scara - robotit Kiertyväniveliset robotit Sylinterirobotti Rinnakkaisrakenteiset robotit Robottien koordinaatistojärjestelmät ja kehykset Kinematiikkaa ja robotin geometriset riippuvuudet Johdanto Robotiikan matematiikkaa ( Robotiikan suora- ja käänteinen kinematiikka Robotin ohjausjärjestelmät ROBOTTIEN OHJELMOINTI Yleistä Johdattamalla ohjelmointi Opettamalla ohjelmointi Etäohjelmointi (off-line) ROBOTTITARRAIMET, TYÖKALUT JA AISTINJÄRJESTELMÄT Tarraimet ja työkalut Aistinjärjestelmät ROBOTISOINNIN PERUSTEET JA ROBOTTISOVELLUTUKSET Yleistä Yleisimmät robotisointikohteet Robotisointiprojektin suunnittelu ja toteutus TURVALLISUUS Yleistä Robotisoinnin luomat uudet työtehtävät Robottijärjestelmän suunnittelussa huomioitavia asioita Robotin aiheuttamat tyypillisimmät vaaratilanteet Robotin pysäytystoiminnot Tulevaisuuden turvalaitteet ihmisen ja robotin välisessä vuorovaikutuksessa
... 37 4.")
2 ROBOTIIKKA (28) 1. JOHDANTO JA HISTORIAA Roboteista muodostunut mielikuva on usein peräisin tieteiselokuvista, niin nuorilla kuin ehkä vanhemmillakin. Robotiikkaan liittyvien tekniikoiden kehittyminen on ollut nopeaa, ja robotit ovat tulleet ihmisille paljon arkipäiväisimmiksi mm. palvelurobotiikan ansiosta. Valtaosa roboteista on toki vielä teollisuuden tarpeisiin tehtyjä. Teollisuuteen sijoitetut robotit ovat tärkeä osa sen toimintaa, ja ilman niitä monen yrityksen kilpailukyky ei olisi riittävä kovassa kansainvälisessä kilpailussa. Tärkein lenkki robottien käytössä on kuitenkin ihminen. Ihminen suunnittelee järjestelmät, kokoaa ne, ohjelmoi laitteet ja pitää ne kunnossa. Robotiikkaan liittyy paljon asioita, jotka tulevat esille eri tekniikan alojen kursseilla. Robotiikassa yhdistyy useiden eri alojen tietämys ja osaaminen. Kappaleenkäsittelyn automaatiosovellutuksissa käytettiin aikaisemmin mekaanisia, hydraulisia ja pneumaattisia toimilaitteita, jotka rakennettiin sovellutuskohtaisiksi. Koneiden asetukset kestivät useita päiviä, mikäli asetuksia voitiin lainkaan muuttaa ilman laitteiden täydellistä uusimista. Koneiden panostus, kappaleiden siirrot työnvaiheiden välillä koneessa ja valmiiden tuotteiden purku koneesta olivat tyypillisiä automatisointikohteita. Nämä automatisointiratkaisut soveltuivat suurien sarjojen ja pitkäikäisten tuotteiden valmistukseen. Tuotanto oli tavallisimmin varastotuotantoa, jolloin valmistettiin pitkälle vakioituja tuotteita. Vaatimukset tuotannon joustavuudesta, asiakasmyötäisyydestä ja pienien sarjojen yleistyminen edellyttivät, että tuotantoautomaatiossa otettiin käyttöön ohjelmallisesti muunneltavat toimi- ja kappaleenkäsittelylaitteet. Servo-ohjatut ohjelmoitavat robotit ovat ideaalinen ratkaisu piensarjatuotannon kappaleenkäsittelyn ongelmiin ja 199 luvuilla robottisovellutukset vastasivat joustavuudeltaan aikaisempia manipulaattori- ja toimilaiteautomatisointeja. Robottien hankala ja työläs ohjelmointi esti robottien joustavuuden hyödyntämisen piensarjatuotannossa. Nykyisten robottien käyttövarmuus ja luotettavuus on hyvä. Robottien ohjelmointi on kehittynyt myös ripeästi. Korkean tason ohjelmointikielet helpottavat ja nopeuttavat robottien ohjelmien tekoa. Robotteihin liitetyt anturit mahdollistavat älykkäiden ympäristön muutoksiin automaattisesti sopeutuvien ja reagoivien robottien käytön entistä vaativammissa sovellutuksissa. Yksittäisten automaatiosaarekkeiden lisäksi robotteja käytetään laajempien joustavien automaattisten tuotantojärjestelmien osana. Kansainvälisen robottiyhdistyksen määritelmän mukaan robotti on uudelleen ohjelmoitavissa oleva monipuolinen vähintään kolminivelinen mekaaninen laite, joka on suunniteltu liikuttamaan kappaleita, osia, työkaluja tai erikoislaitteita ohjelmoitavin liikkein monenlaisten tehtävien suorittamiseksi teollisuuden sovelluksissa. Uudelleen ohjelmoitavuus on siis olennaista, mutta nykyaikaisissa aistinohjatuissa robottisovelluksissa pelkkä uudelleen ohjelmoitavuus ei riitä, vaan robotit on saatava muodostamaan tuotteiden suunnittelutiedoista ja ympäristömallista liikeratansa, jota päivitetään prosessia tarkkailevien antureiden avulla. 2

3 Yksinkertaistettuna teollisuusrobotti on mekaaninen kone, joka siirtää työkalun kiinnityslaippaa halutulla tavalla. Liikerata voi olla kokonaan etukäteen määritetty, toimintaympäristön tapahtumien perusteella valittava tai antureiden perusteella liikkeiden aikana luotu. Robotin jalustan ja työkalun välissä on tukivarsia, joita nivelet liittävät toisiinsa. Niveliä liikuttavat takaisinkytketysti ohjattavat servotoimilaitteet. Seuraavat tilastot ovat Suomen robotiikkayhdistyksen julkaisemia. ( Robotiikan historiaa: ensimmäinen robottilaite, autopilotti 1913, robottisana 1923 (näytelmässä RUR) ensimmäinen teollisuusrobotti USA 1962 teollisuusrobotit yleistyivät 7-luvulla, lähinnä autoteollisuudessa (hitsaus) vuonna 198 maailmassa noin 8 teollisuusrobottia vuonna 1995 maailmassa noin 65 teollisuusrobottia Suomessa robotisointi käyntiin 7-luvulla, pääpaino 7-luvulla maalausrobotiikassa 8-luvulla hitsaus ja kappaleenkäsittely : hitsaussovelluksia 5 %, kokonaismäärä noin 5 kpl , uusia sovelluksia mm. laserleikkaus, robotteja yhteensä noin 1 kpl, 1996 robotteja Suomessa noin 165, vuonna 2 robottien määrä oli 3193 ja vuonna 27 jo 5821 kpl. Kuva 1.1 Robottien käyttökohteiden jakautuminen Suomessa sekä jakauma vapausasteen mukaisesti. 3

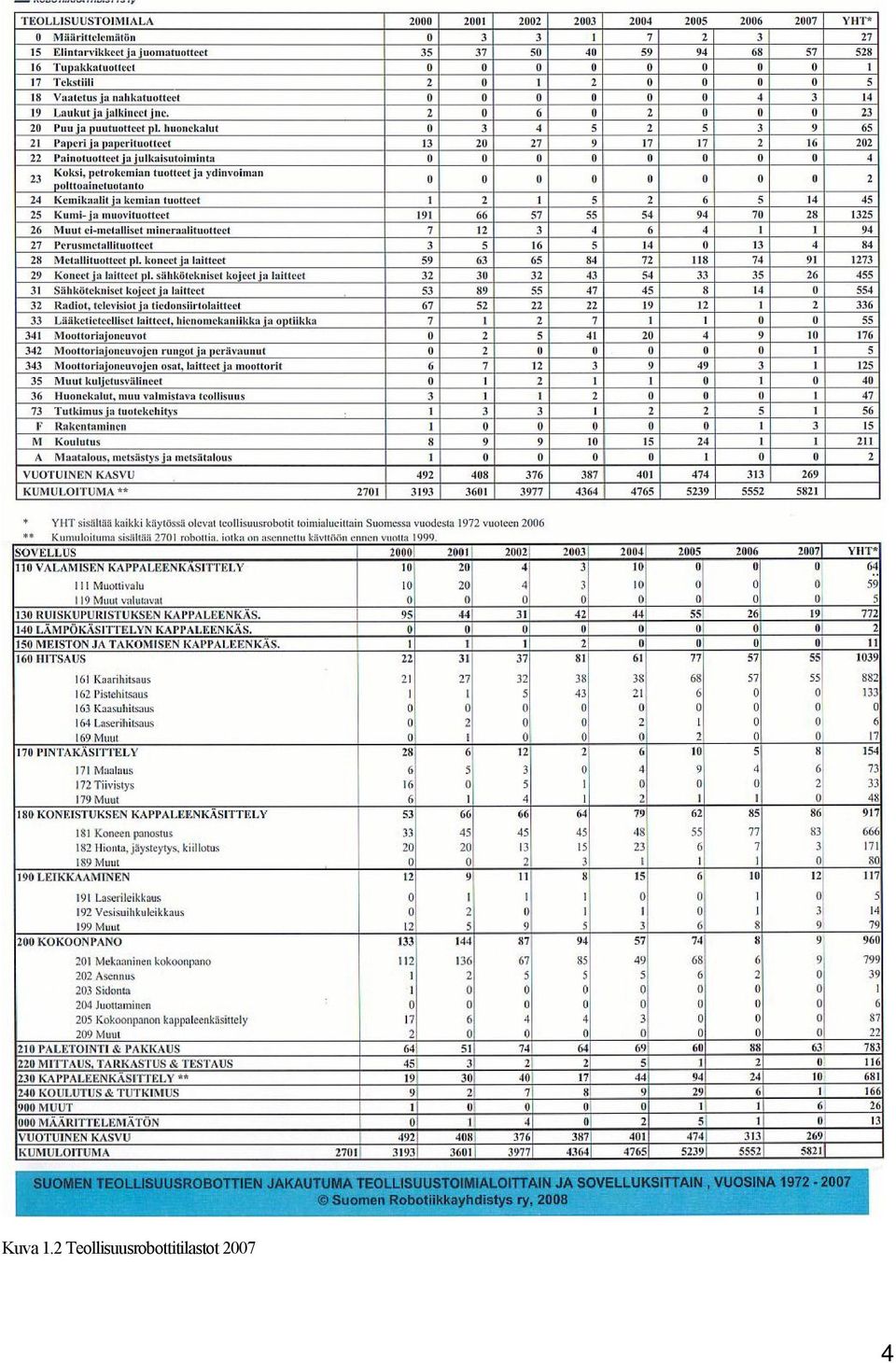
4 Kuva 1.2 Teollisuusrobottitilastot 27 4
5 Teollisuusrobotteja on tähän mennessä valmistanut ainakin viisisataa yritystä. Kunkin valikoimaan on koko ajan kuulunut useita robottimalleja. Yhden mallin elinkaari on kestänyt keskimäärin neljä vuotta. Lisäksi rakenteita on jouduttu erilaistamaan patenttien ja eri sovellusten vuoksi. Joten erilaisia teollisuusrobotteja on suunniteltu useita tuhansia. Markkinoiden keskittyessä on vaihtoehtojen kirjo hieman supistunut, mutta jatkuvasti ilmaantuu uusiakin robottien valmistajia. Standardi ISO 8373 määrittelee teollisuusrobottien sanastoa ja myös yleisemmät robottimallit mekaanisen rakenteen mukaan. Merkittäviä robottivalmistajia: ABB ( Motoman ( Fanuc ( KUKA ( Kawasaki ( Yleisimmät rakenteet: Suorakulmainen robotti Sylinterirobotti Napakoordinaatisto robotti Scara-robotti Kiertyvänivelinen robotti Rinnakkaisrakenteinen robotti Robottien jakaminen voidaan myös tehdä tehtävän mukaan: Maalausrobotit (nopeita, tarkkuus ei ole tärkeää) Prosessirobotit (nopeita, tarkkoja, mutta jäykkiä ) Kokoonpanorobotit (nopeita, suuri tarkkuus, alhainen kappaleenkäsittelykyky ) 2. ROBOTTITYYPIT JA RAKENTEET 2.1 Yleistä Varsinaisten teollisuusrobottien lisäksi on olemassa erilaisia erikoisrobotteja. Tietokoneiden ohjaamia ajoneuvoja ja työkoneita kutsutaan liikkuviksi roboteiksi (mobiilirobotit). Vihivaunut (Automatically guided vehicle, AGV) ovat olleet käytössä teollisuudessa ja varastoissa jo 197-luvulta lähtien. Liikkuvien robottien sovellusalueita ovat: kuljetukset, rakentaminen, palontorjunta- ja pelastustehtävät, kaivokset, maa- ja metsätalous, vartiointi, siivous, satelliittien kokoonpano- ja huoltotehtävät ja sodan käynti. Nykyään näiden navigoinnin apuna käytetään myös GPS- järjestelmää (Global Positioning System). Perinteisesti robotiikka on sovellettu tuotantolinjoilla, mutta yhä enemmän robotiikka on myös valtaamassa palvelutehtäviä, jolloin puhutaan palvelurobotiikasta. Esimerkkeinä tällaisista ovat robottipölynimurit, lentokoneiden pesurobotit, vanhusten hoitoon tarkoitetut robotit, 5

6 lypsykonerobotit jne.. Omana erittäin vaativana robotiikan alana ovat ns. ihmisrobotiikka eli humanoid robotics. Kuva vapausasteen humanoidirobotti Kuva 2.2 Motoman:n kahdella käsivarrella varustettu robotti baarimestarina. Kuva 2.3 Mobiilirobotteja. 6

7 Palvelurobotiikka Laajasti ymmärrettynä on robotiikkaa, jonka sovellusalue kattaa muut työt kuin perinteiset tehdastyöt ja palveluroboteilla on myös hyvä liikkuvuus. Tärkeimmät sovellukset alueet: Työkoneteknologia rakentamisessa ja luonnonvarojen hyödyntämisessä. Avaruudentutkiminen(kuu, planeetat, asteroidit,). Palvelutoiminnot (yksitoikkoiset, raskaat tai terveydelle vaaralliset työt, kotiapu, vammaisteknologia) Sotilasteknologia Katastrofien jälkihoito, ydinteknologian purkaminen Viihde Erot tehdasrobotiikkaan: Tehtaissa usein työt liikkuvat ja robotit pysyvät paikoillaan. Palvelurobottien tapauksessa töitä ei voida useinkaan liikuttaa, vaan robotin on liikuttava työn luokse. Tehtaissa robotin työympäristö on usein järjestäytynyt ja voidaan olettaa tunnetuksi, mikä helpottaa ohjausta. Tehtaiden ulkopuolella palvelurobottien työympäristö on usein järjestäytymätön, usein etukäteen vähän tunnettu, mikä vaatii kehittyneitä ohjaus- ja aistinjärjestelmiä. Ihmisten läsnäoloa ei voida valvoa robottien toiminta-alueilla! Palvelurobotin osajärjestelmät: Energiajärjestelmä Liikuntajärjestelmä Liikkeenohjausjärjestelmä(pilotti) Navigointijärjestelmä Aistinjärjestelmä Toiminnansuunnittelu ja ohjausjärjestelmä Työjärjestelmä Ihminen-robottiliittymä Suurimmat haasteet tutkimuksessa ja teknologian kehittämisessä: Liikuntajärjestelmät ovat edelleen pullonkaula monissa sovellutuksissa kaukana siitä, mitä luonto on kehittänyt, erityisesti kävely on vielä tehotonta. Energiajärjestelmä saattaa rajoittaa autonomisuutta huomattavasti (sähkönvarastointi) Ympäristön aistinta kyky vielä riittämätön moniin sovellutuksiin. Ihminen-koneliitäntäpinta tulisi kehittää tasolle, jossa robotti ja ihminen kommunikoivat ihmisen ehdoilla Taitoa vaativien työtehtävien opettaminen ja suorittaminen robotilla vastaa vielä eloa kivikaudella ihmiskunnan kehityksessä Kaupalliset palvelurobotit tekevät tuloaan Imurit Seuralaiset, jne. 7

8 Joka kodin imurointirobotti lienee lähimpänä kaupallista läpimurtoa. Useat yritykset ovat julkistaneet oman versionsa, joilla on mm. seuraavia ominaisuuksia: Välttää esteitä, kuumia paikkoja ja portaita aistijärjestelmän avulla Säätää ajo nopeutensa pölymäärän mukaan Toiminta-aika noin 6 min. Kuva 2.4 Japanilaisen Matshushitan (Panasonic) imurirobotti. Kuva 2.5 Hondan Asimo-robotti, joka painaa 13 kg, kiihtyvyys 1m/s, hyötykuorma 5 kg ja toiminta-aika 15 min. Keskellä lemmikkirobotti ja oikealla Mitsubishi Wakamaru yleiskäyttöinen kotirobotti, puhuu perheensä kanssa, tarjoaa tietoa (internetistä), valvoo kotia kun muut ovat poissa, hinta 14$ ( 8
, valvoo kotia kun muut ovat poissa,")
9 Teollisuusrobottityypit: Robotin määritteleminen yksikäsitteisesti on vaikeaa. Teollisuusrobotti voidaan määritellä toimilaitteiden, ohjelmointitavan, nivelrakenteen- ja käyttötarkoituksen perusteella monella tavalla. Tässä yhteydessä: "Teollisuusrobotti on ohjelmoitava monitoimilaite, joka on suunniteltu sekä käsittelemään että kuljettamaan osia tai työkaluja ja tarkoitettu muunneltavine, ohjelmoitavine ratoineen erilaisiin tuotantotehtäviin". Pelkkää yksinkertaista toimilaitekäsivartta, joka panostaa ja purkaa konetta ei voida kutsua robotiksi, ellei sitä voida ohjelmoida uudelleen toiseen tehtävään. Japanilaisen määritelmän mukaan teollisuusrobotteja ovat: manuaalinen manipulaattori kiinteän sekvenssin robotti muunneltavan sekvenssin robotti johdattamalla ohjelmoitava robotti numeerisesti ohjattu robotti älykäs, havainnoiva robotti Suomessa roboteiksi luokitellaan neljä viimeistä tyyppiä. Määritelmän kirjavuus aiheuttaa vaikeuksia, kun tulkitaan kansainvälisiä, maittain tehtyjä robottitilastoja. Japanilaisten väljä robotin määrittely selittää osan Japanin ylivoimaisista robotisointimääristä. Robottien rakenteessa on usein yritetty matkia ihmisen nivelien toimintaa ja robotin rakenteessa on ihmisen käsivartta, rannetta ja kouraa vastaavat nivelliikkeet. Robotin käyttäjää ei välttämättä kiinnosta analogia ihmisen liikkeisiin eikä robotin liikkeiden taustalla oleva koordinaatistojen matemaattinen hallinta eivätkä liikenopeuksien laskemiseksi käytetyt algoritmit. Käyttäjä on kiinnostunut ainoastaan siitä suoriutuuko robotti sille suunnitellusta käsittely- ja siirtotehtävästä. Robottien käyttösovelluksissa robotin tarkkuus on olennainen tekijä. Lähes kaikkien robottien tarkkuus on rakenteesta riippumatta +- 1 mm, mutta nykyisin yleensä paljon parempi. Kokoonpanorobotilta vaaditaan parempaa tarkkuutta, jolloin robotin on pystyttävä mm:n asemointitarkkuuteen. Robottien kappaleenkäsittelykyky vaihtelee laajoissa rajoissa: pienet robotit on suunniteltu kg kappaleiden käsittelyyn, suurimmat teollisuusrobotit nostavat jopa satojen kilojen taakkoja. Käsivarsien liikeratojen lisäksi myös robotin ranne voi kiertyä tavallisesti kolmen akselin ympäri. Kiertyvän ranteen ohella robotin tarttujaan voidaan liittää ylimääräisiä liikeakseleita, joilla siirrettävien kappaleiden asemointia on mahdollista säätää ja tarkentaa. Ranteen nivelliikkeiden käytölle asettavat rajoja tarttujan Robotit seisovat tavallisesti omalla kiertyvällä jalustallaan. Robotin käyttö on monipuolisempaa, kun robotti asennetaan lineaariradalle, jolloin yhdellä robotilla voidaan palvella useita etäällä toisistaan olevia työasemia. Robotti on mahdollista ripustaa myös ylösalaisin roikkumaan portaaliin. Työpisteen yläpuolelle kiinnitetty robotti tarjoaa katveettoman ja laajan työskentelyalueen. 9

10 Kuva 2.6 Robottien rakenteita, kinematiikkaa ja työalueita. 2.2 Robottityypit ja rakenteet Suorakulmaiset robotit Suorakulmaisten robottien kolme ensimmäistä vapausastetta ovat lineaarisia. Tyypillisintä edustajaa kutsutaan yleensä portaalirobotiksi. Sen rakenne on tuettu työalueen nurkista palkeilla. Kuva 2.7 Yleiskuva portaalirobotista (ABB, robottiesitteet). 1

11 2.2.2 Scara - robotit Kuva 2.8 Scara robotti Scara - robotissa (Selective Compliance Assembly Robot Arm) on tiettyyn suuntaan joustava kokoonpanorobottikäsivarsi ja kolmella kiertyvällä nivelellä työkalu saadaan tietyllä tasolla oikeaan kohtaan ja kiertymäkulmaan. Neljäs lineaarinen pystyliike on työtason normaalin suuntainen. Scara-robotti muistuttaa ihmisen vaakatasossa liikkuvaa käsivartta, mutta ranteeseen on asennettu pystyjohde Kiertyväniveliset robotit Kiertyvänivelisessä robotissa kaikki vapausasteet ovat kiertyviä. Nämä ovat tavallisimpia teollisuusrobotteja. Vapausasteita on yleensä kuusi tai neljä. Kuva 2.9 ABB:n IRB 64R kiertyvänivelinen teollisuusrobotti 1 kg: kantokyvyllä., 4-vapausasteen paletointi- ja pakkausrobotti (ABB, robottiesite) ja Motoman:n uusi käsivarsirakenne. 11

12 Nykyiset teollisuusrobotit perustuvat lähes poikkeuksetta tähän mekaniikkaan, jossa tukivarret on kytketty peräkkäin. Tästä johtuu, että robottien kuormankantokyky on melko pieni, mutta työalue (ulottuvuus) suurehko. Kehitteillä ovat sellaiset robottikäsivarret, joissa on yli kuusi vapausastetta paremman kurottelukyvyn saavuttamiseksi. Tällöin robotin on esimerkiksi mahdollista kurottua ikkuna-aukosta auton sisälle, liikuttaa työkalua halutulla tavalla ja samalla väistellä ikkunoiden reunoja Sylinterirobotti Sylinterirobotin nimitys on luonnollisesti peräisin sylinterikoordinaatistosta. Kuva 2.1 Perinteinen sylinterirobottirakenne Rinnakkaisrakenteiset robotit Suuria voimia robotit saadaan kestämään kytkemällä joitain robotin vapausasteita (tai pikemminkin toimilaitteita) rinnakkain. Tällöin rakennekin tukevoituu, kuten Neos - robotilla. Työalue tosin rajoittuu pieneksi. Kuva 2.11 Rinnakkaisrakenteinen robotti työstötehtäviin. Erästä perusratkaisua, jossa kahden levyn välistä asemaa muutetaan kuudella kumpaankin levyyn kytketyllä lineaarisella toimilaitteella, kutsutaan nimellä `Stewartin alusta'. Erittäin 12

13 nopeita robotteja valmistetaan kytkemällä rinnakkain ultrakevyitä rakenteita, kunhan vain työkohteen ympärillä riittää vapaata työaluetta. Kuva 2.12 ABB:n IRB 34 robotti soveltuu hyvin elintarviketeollisuuden pakkauslinjalle. Suljetun kinemaattisen rakenteen idea on jakaa tukivoimat toisiaan tukevien rakenteiden avulla, jolloin robotista tulee kestävä. Keveys ja mahdollisuus suuriin voimiin ovatkin rakenteen suurimmat edut. Näitä robottirakenteita on tutkittu ja suunniteltu vasta 199-luvulta alkaen. Ne ovat yleistymässä työstötehtävissä, esimerkiksi karaa liikuttavina rakenteina. Kytkemällä mekaanisia vapausasteita eri tavalla yhteen ja varioimalla vapausasteiden liikematkoja saadaan lukuisia erilaisia robotteja Robottien koordinaatistojärjestelmät ja kehykset Robottien akselit (vapausasteet) eli nivelet voivat olla rakenteeltaan hyvin monenlaisia kuten suoraviivaisia, kiertyviä, pallomaisia tai liukuvia liikkeitä suorittavia. Robottien yleisimmät liikemuodot ovat kiertyvät ja suoraviivaiset liikkeet. Toimilaitteina lineaariliikkeille ovat yleensä pneumaattiset tai hydrauliset sylinterit sekä sähköiset lineaaritoimilaitteet. Kiertyvät liikkeet on yleensä toteutettu sähköisillä servomoottoreilla, mutta myös sähköisillä askelmoottoreilla sekä pneumaattisilla tai hydraulisilla vääntömoottoreilla voidaan kiertoliikkeet toteuttaa. Robottien konfiguraatiossa sen käyttämä koordinaatistojärjestelmä on yhdenmukainen sen mekaanisen rakenteen kanssa. Kuvassa 2.13 nähdään kaikki yleisimmät koordinaatistojärjestelmät: Suorakulmainen (Cartesian), sisältää kolme lineaarista nivelakselia Sylinterimäinen (Cylindrical), sisältää yhden kiertyvän ja kaksi lineaarista nivelakselia Pallomainen (Spherical), sisältää kaksi kiertyvää ja yhden lineaarisen nivelakselin Nivelmäinen (Articulated), sisältää kolme ihmiskäden kaltaista kiertyvää nivelakselia SCARA (Selective Compliance Assembly Robot Arm), sisältää kaksi rinnakkaista vaakatason suuntaisen liikkeen mahdollistavaa kiertyvää nivelakselia sekä yhden pystysuoran suuntaisen liikkeen mahdollistavan lineaarisen nivelakselin 13

14 Kuva 2.13 Robottien yleisimmät koordinaatistojärjestelmät. Robotteja liikutetaan suhteessa erilaisiin koordinaatistokehyksiin. Liikkeiden toteutukset ovat erilaisia, riippuen minkälaisen koordinaatistokehyksen mukaan liike toteutetaan (kuva 2.14). Maailmakoordinaatiston mukaisessa kohdekehyksessä robotti liikkuu pääakselien x-, y-, tai z akselien suuntaisesti, jolloin samanaikaisesti voi useampi robotin nivelistä suorittaa oman liikkeensä. Nivel- eli peruskoordinaatiston mukaisessa kohdekehyksessä liikutetaan robotin jokaista yksittäistä niveltä erikseen. Työkalukoordinaatiston mukaisessa kohdekehyksessä on luotu työkalun mukainen koordinaatisto, jonka mukaisesti robotti suorittaa liikkeensä, mutta erona maailmankoordinaatiston mukaiseen liikuttamiseen on se, että työkalukoordinaatisto liikkuu myös robotin liikkeen mukana. Työkalukohdekehyksen käyttö on hyödyllistä robotin ohjelmoinnissa, jossa robotin on liikuttava eri kohteiden välillä tai osien kokoonpanossa. Kuva 2.14 Robotin kohdekoordinaatistot. 14

15 2.3 Kinematiikkaa ja robotin geometriset riippuvuudet Johdanto Robottihan koostuu useista tukivarsista, joista kaksi liikkuu toistensa suhteen joko jonkin suoran suuntaisesti tai suoran ympäri (kiertoliike). Usein tätä akselia kutsutaan robotin niveleksi. Näiden nivelien avulla tukivarret muuttavat keskinäisiä asentojaan ja asemiaan. Tätä robotin perusliikettä eli siis niveltä kutsutaan robotin vapausasteeksi (DOF, degree of freedom). Nykyisissä roboteissa on yleensä kuusi tai neljä vapausastetta. Yleisin mekaaninen rakenne robotissa on siis sellainen, jossa tukivarsi aina kytketään edellisen perään (serial linked). Tätä rakennemuotoa kutsutaan avoimeksi kinemaattiseksi rakenteeksi (kuva 2.15). Tukivarret voidaan myös kytkeä rinnakkain, jolloin rakennetta kutsutaan suljetun kinematiikan rakenteeksi (kuva 2.16). A B A B O1 O2 O1 O2 Kuva 2.15 Yhden vapausasteen suljetun kinematiikan rakenne. Tällaisessa rakenteessa annettaessa arvo tietylle nivelen kulmamuuttujalle määrätään samalla automaattisesti muidenkin kulmamuuttujien arvot. Normaalisti roboteissa halutaan kuitenkin antaa itsenäisesti jokaiselle nivelelle omat arvonsa, mikä suljetun kinematiikan rakenteissa on mahdotonta. Suljetun kinematiikan robottirakenteet ovatkin harvinaisempia, mutta kuitenkin nykyään on markkinoilla myös näitä rakenteita, kun halutaan erikoisen nopeaa toimintaa tai todella jäykkiä mekaanisia rakenteita. A B C O1 Kuva 2.16 Kolmen vapausasteen avoimen kinematiikan rakenne. Normaalisti robottien rakenne perustuu siis avoimen kinematiikan rakenteeseen, jossa jokaiselle nivelmuuttujalle voidaan antaa omat arvonsa, mutta käytännössä ei ole kuitenkaan mitään varmuutta, että robotin end-effector eli työkalun kärki on tarkoitetussa asemassa. 15
. Tätä rakennemuotoa kutsutaan avoimeksi kinemaattiseksi rakenteeksi (kuva 2.15).")
16 Robotin ohjausjärjestelmän tärkein tehtävä on hallita työkalunsa asemaa ja liikettä annettujen ohjearvojen mukaisesti. Robotin on siis osattava laskennallisesti muuttaa haluttu työkalun asema robotin oikeiksi vapausasteiden paikkaohjearvoiksi. Tätä tehtävää sanotaan käänteiseksi kinemaattiseksi tehtäväksi (inverse kinematics). Suora kinemaattinen (forward kinematics) tehtävä on työkalun aseman määritys paikka-arvojen perusteella. Teollisuusrobotin koordinaatistot: Yleisesti käytössä ovat suorakulmaiset ortonormeeratut oikeakätiset koordinaatistot. Maailman koordinaatisto on robotin työskentely-ympäristöön sidottu robotin ulkopuolinen koordinaatisto. Peruskoordinaatisto on robotin jalustaan sidottu koordinaatisto. Tässä on yleisesti käytetty toteutusta, jossa robotin z-akseli yhtyy ensimmäisen vapausasteen akseliin, x-akseli osoittaa ensimmäisen nivelen työalueen keskikohtaan ja xy -taso yhtyy lattiaan (kuva 2.17). Kuva 2.17 Robotin peruskoordinaatisto ja oikealla kuvattu robotin työkalulaipan ns. TOOL-työkalukoordinaatisto. Työkalukoordinaatisto on suorakulmainen koordinaatisto, joka sidotaan työkalumäärityksellä kiinni haluttuun kohtaan robotin työkalua verrattuna alkuperäiseen (TOOL ) työkalulaippaan sidottuun koordinaatistoon (kuva 2.17). 16

17 2.3.2 Robotiikan matematiikkaa ( Matriiseja voidaan käyttää kuvaamaan pisteitä, vektoreita, kehyksiä, siirroksia, kiertoja ja muunnoksia. Näitä ominaisuuksia hyödynnetään myös robotiikassa. Pisteen esitysmuoto 3D-avaruudessa: Kuva 2.18 Pisteen esitys 3-ulotteisessa avaruudessa. Vektorin esitysmuoto 3-ulotteisessa avaruudessa: Vektori voidaan määritellä sen alku- ja loppupisteiden koordinaateilla. Esimerkiksi vektorin alkupiste on A ja loppupiste on B, niin saadaan vektori: P = ( B A )ˆ i + ( B A ) ˆj + ( B A ) kˆ AB X X Y Y Vektorin alkupisteen ollessa origossa saadaan vektori: P = a Yleensä aina vektorit esitetään robotiikassa matriisimuodossa: a X P = b Y cz Z Z X iˆ + b ˆj + c kˆ Tätä esitystä voidaan vielä kehittää ottamalla mukaan skaalauskerroin w, jolloin kyseinen X vektori on muodossa: P = Y, jossa ax = x/w, by= y/w ja cz= z/w Z w Muuttuja w voi olla mi kä luku tahansa, jolloin sillä voidaan muuttaa vektorin suuruutta. Tietokoneen kuvan zoomaus perustuu juuri tähän esitysmuotoon. Jos w on suurempi kuin 1, niin kaikkia vektorin komponentteja kasvatetaan ja jos se vastaavasti on pienempi kuin 1, niin niitä pienennetään. Vektorin suuntavektorin esityksessä w =, jolloin vektorin pituudella ei ole merkitystä. Y Z 17
ˆ i + ( B A ) ˆj + ( B A ) kˆ AB X X Y Y Vektorin alkupisteen ollessa origossa saadaan vektori: P = a Yleensä")
18 Kuva 2.19 Vektorin esitys 3-ulotteisessa avaruudessa. Esimerkiksi jos vektorina on P 3 iˆ + 5 ˆj + 2 x Y Z kˆ = ja skaalauskerroin on 2, niin vektorin esitys matriisimuodossa on: P = ja sen suuntavektori matriisimuodossa: P = Yksikkövektoria varten on ensin laskettava vastaava yksikkövektorin pituus: λ = p + p + p = 6.16, jossa p = =. X Y Z X, p = = Y jne ja yksikkövektori: P =.324 Origoon kiinnitetyn kehyksen esitysmuoto: Kolmella vektorilla voidaan myös esittää kehys, jonka oma origo yhtyy peruskoordinaatiston origoon. Yleensä nämä kolme vektoria ovat kohtisuorassa toisiaan vasten ja niitä merkitään yksikkövektoreilla n, o, a kuvaamaan normaali-, orientaatio- ja asentovektoreita. Kaikki kolme yksikkövektoria määritellään kolmella komponentilla, joten kehys Frame voidaan matriisimuodossa esittää seuraavasti: n Frame = n n X Y Z o o o X Y Z a a a X Y Z Kuva 2.2 Peruskoordinaatiston origoon kiinnitetty kehys. Omalla origolla varustetun kehyksen esitysmuoto: Jos kehys ei yhdy peruskoordinaatiston origoon, niin tällöin ilmoitetaan myös kehyksen origon etäisyys peruskoordinaatiston origosta, minkä tehtävän suorittaa vektori, jonka alkupiste on peruskoordinaatiston origossa ja loppupiste kehyksen origossa (kuva 2.21). Tällöin kehys voidaan määritellä kolmella yksikkövektorilla ja neljäs vektori määrittelee sen sijainnin: 18

19 nx n = Y Frame nz o o o X Y Z a a a X Y Z PX P Y PZ 1 Kuva 2.21 Peruskoordinaatisto suhteessa kehykseen. Kuten yllä olevasta matriisikuvauksesta voidaan todeta, niin nämä kolme vektoria ovat suuntavektoreita (w=) kuvaten kolmen yksikkövektorin n, o, a suuntia ja neljäs vektori (w=1) ilmoittaa kehyksen origon sijainnin peruskoordinaatiston origosta. Tämän neljännen vektorin pituus on tärkeä informaatio ja siksi käytössä on skaalauskertoimelle w arvo 1. Esimerkiksi kehyksen Frame origo sijaitsee 3,5,7 yksikön etäisyydellä perus-koordinaatiston origosta ja sen n-akseli on yhdenmukainen x-akselin kanssa, o-akseli on 45º kulmassa suhteessa y-akseliin ja a-akseli on 45º kulmassa suhteessa z-akseliin. Tällöin tämä kehys voidaan matriisin avulla määritellä seuraavasti: 1 Frame = Kuva 2.22 Esimerkki kehyksen määrittelytä 3D-avaruudessa. Homogeeninen siirrosmatriisi: Jos kehyksen siirto avaruudessa tehdään ilman orientaation (kierron) muutosta eli kehyksen suuntavektorit eivät muutu, voidaan pelkkä siirto esittää matriisin muodossa seuraavasti: 1 X 1 Y T =, jossa vektorilla d ilmoitetaan sen komponenttien x, y ja z 1 Z 1 etäisyyden muutokset alkuperäisestä asemasta. d d d 19

20 Lopullinen kehyksen uusi asento saadaan seuraavasti: = = d P a o n d P a o n d P a o n P a o n P a o n P a o n d d d Z Z Z Z Z Y Y Y Y Y X X X X X Z Z Z Z Y Y Y Y X X X X Z Y X Frame Kuva 2.23 Kehyksen siirto (ei kiertoa) 3D-avaruudessa. Esimerkiksi siirrettäessä kehystä F yhdeksän yksikköä x-akselin suunnassa ja viisi yksikköä z- akselin suunnassa saadaan F:lle uusi sijainti seuraavasti: = F alkup. F d d d F alkup z y x uusi Trans.,,, ) ( = = = F Kiertoliike x-akselin ympäri: Kuva 2.24 Pisteen P sijainti ennen kiertoa x-akselin ympäri ja sijainti kulman θ verran x-akselin ympäri. 2
 ( = = = 1 13.643.766 3.439.819.369 14.628.527.527 1 8.643.766 3.439.819.369 5.628.527.527 1 5 1 1 9 1 F Kiertoliike x-akselin ympäri: Kuva 2.")
21 Yllä olevissa kuvissa on esitetty pisteen P kierto x-akselin ympäri kehyksessä, jonka origo yhtyy peruskoordinaatiston origoon ja lisäksi sen akselit ( n, o, a ) yhtyvät lähtötilanteessa x-, y- ja z-akseleihin. Kiertävä piste P (Px, P y ja Pz) kiertyy siis kierrettävän kehyksen mukana. Alla olevassa kuvassa on tarkasteltu pisteen P koordinaattipisteitä (P y ja Pz) 2D-tasossa x- akselin suhteen. Kuva 2.25 Pisteen P sijainti suhteessa alkuperäiseen kehykseen katsottuna x-akselin suunnasta (2D -näkymä). Uusiksi koordinaattiarvoiksi pisteelle P saadaan: Px = Pn P = l 1 l = y 2 P Pa P = l + 3 l = z 4 P + Pa cosθ sinθ sinθ cosθ Samat matriisimuodossa: P P P x y z 1 = cosθ sinθ sinθ cosθ P P P n o a Yksinkertaistettu kaavamuoto on seuraavasti: U P = U T x R P xyz P = Rot ( x, θ ), mutta se esitetään robotiikassa yleensä noa R P, jossa U TR on kehyksen R siirros kehyksen U (universaali) suhteen R P on (piste P kehyksen R suhteen) Pnoa U P on Pxyz (piste P kehyksen U suhteen) Kiertomatriisi x-akselin ympäri: 1 Rot(x, θ ) = cosθ sinθ sinθ cosθ Kiertomatriisi y-akselin ympäri: cosθ Rot( y, θ ) = sinθ 1 sinθ cosθ 21
22 Kiertomatriisi z-akselin ympäri: = 1 cos sin sin cos ), ( θ θ θ θ θ z Rot Esimerkiksi piste P on kiinnitetty kierrettävään kehykseen, jota kierretään x-akselin suhteen 9º. Pisteen P uuden koordinaattiarvot saadaan seuraavasti: T (2,3,4) = = = cos sin sin cos P P P P P P a o n z y x θ θ θ θ Yhdistettyjen siirrosten ja kiertojen toteutus: Esimerkiksi tehtäessä samanaikaisesti seuraavat toiminnot: Kierto x-akselin ympäri kulman α verran P P noa xyz x Rot = ), (, 1 α Lisäksi siirros [l1, l2, l3] x, y ja z-akselien suhteen P l l l P l l l P noa xyz xyz x Rot Trans Trans = = ), ( ),, ( ),, ( , 3 2 1, 2 α Näiden lisäksi vielä kierto y-akselin ympäri kulman β verran P l l l P P P noa xyz xyz xyz x Rot Trans y Rot y Rot = = = ), ( ),, ( ), ( ), ( ,, 3 α β β Esimerkiksi tehtäessä ensin 9º kierto z-akselin ympäri ja seuraavaksi 9º kierto y-akselin ympäri sekä lopuksi siirros [4,-3,7] saadaan lopulliseksi asennoksi: P P noa xyz z Rot y Rot Trans ),9 (,9) ( 3,7) 4, ( = = = Siirrosmatriisin käänteismatriisi: Robotiikan useissa määrittelytehtävissä tarvitaan käänteismatriisia. Alla olevassa kuvassa kuvataan tilannetta, kun halutaan paikoittaa TOOL1(E) kohde-koordinaatistoon P, esimerkiksi käytännössä halutaan porata reikä kohde-koordinaatistossa P olevaan kappaleeseen työkalulla E. Robotin peruskoordinaatiston suhdetta maailman koordinaatistoon U kuvataan kehyksellä R. Porattavan reiän sijainti maailman koordinaatistoon nähden saadaan: E P P U E H H R R U E U T T T T T T = = 22
23 josta työkalun E sijainti kohdekoordinaatistossa saadaan siirroksena U P ja P E tai vaihtoehtoisesti siirroksina U R, R H ja H E. Kuva 2.26 Maailman (Universal) koordinaatisto, robotin peruskoordinaatisto (R), työkalukoordinaatistot TOOL(H) ja TOOL1(E) sekä kohdekoordinaatisto(p). Todellisessa tilanteessa robotin peruskoordinaatiston R siirros suhteessa maailman koordinaatiston U tiedetään, esimerkiksi asennettaessa robotti tuotantosoluun. Myös työkalukoordinaatiston H TE siirros on tiedossa, esimerkiksi määriteltäessä käytettävä työkalu TOOL:n suhteen. Myös kohde-koordinaatiston U TP siirros on tiedossa, esimerkiksi asennettaessa työpöytä maailman koordinaatiston suhteen. P TE on myös tiedossa, koska meidän täytyy tietää mihin esimerkiksi kappaleessa reikä porataan. Lopulta ainoa etukäteen tuntematon siirros on R TH eli työkalulaipan eli ns. TOOL:n siirros robotin peruskoordinaatistoon nähden, mikä onkin robottiohjaimen päätehtävä eli sen on laskettava robotin akseleiden asennot saavuttaakseen haluttu loppuasema. Tähän tarvitaan käänteismatriiseja seuraavasti: ( U 1 U R H H 1 U 1 U P H 1 U 1 U T R) ( TR TH TE ) ( TE ) = ( TR ) ( TP TE ) ( TE ), mutta koska ( TR ) ( TR ) = 1 ja H 1 H TE ) ( TE ) = 1 saadaan R R U 1 U P H 1 TH seuraavasti: TH = TR TP TE TE ( Käänteismatriisin käytöstä esimerkkinä lasketaan seuraavaksi rotaatio eli kääntö x-akselin ympäri. 1 Rotaatiomatriisihan oli: Rot(x, θ ) = cosθ sinθ sinθ cosθ Käänteismatriisin määrittelemiseksi tarvitaan: laskettava matriisin determinantti matriisin transpoosi korvataan saadun transpoosimatriisin elementit alideterminanteilla(minor) jaetaan saatu matriisi determinantilla 23
ROBOTIN ADAPTIIVINEN OHJAUS
 TEKNILLINEN KORKEAKOULU Tietotekniikan osasto ROBOTIN ADAPTIIVINEN OHJAUS Diplomityön aihe on hyväksytty Tietotekniikan osaston osastoneuvoston kokouksessa 19.9.25 Työn valvoja: Työn tekijä: TkT, prof.
TEKNILLINEN KORKEAKOULU Tietotekniikan osasto ROBOTIN ADAPTIIVINEN OHJAUS Diplomityön aihe on hyväksytty Tietotekniikan osaston osastoneuvoston kokouksessa 19.9.25 Työn valvoja: Työn tekijä: TkT, prof.
 Työstäminen robotilla Zenex perustettu 1986 Erikoistunut teknisiin ohjelmistoihin Mastercam CAM-ohjelmisto Mathcad laskentaohjelmisto KeyCreator CAD (ent. CADKEY) Työstörataohjelmien hallinta, DNC etc.
Työstäminen robotilla Zenex perustettu 1986 Erikoistunut teknisiin ohjelmistoihin Mastercam CAM-ohjelmisto Mathcad laskentaohjelmisto KeyCreator CAD (ent. CADKEY) Työstörataohjelmien hallinta, DNC etc.
Mitä ovat yhteistyörobotit. Yhteistyörobotit ovat uusia työkavereita, robotteja jotka on tehty työskentelemään yhdessä ihmisten kanssa.
 Yhteistyörobotiikka Mitä ovat yhteistyörobotit Yhteistyörobotit ovat uusia työkavereita, robotteja jotka on tehty työskentelemään yhdessä ihmisten kanssa. Yhteistyörobotit saapuvat juuri oikeaan aikaan
Yhteistyörobotiikka Mitä ovat yhteistyörobotit Yhteistyörobotit ovat uusia työkavereita, robotteja jotka on tehty työskentelemään yhdessä ihmisten kanssa. Yhteistyörobotit saapuvat juuri oikeaan aikaan
Nykyaikainen robotiikka Kenttä- ja palvelurobotit
 Nykyaikainen robotiikka Kenttä- ja palvelurobotit Robotti?? Robot 1: A robot is a re-programmable, multi-functional manipulator designed to move material, parts, tools, or specialized devices through variable
Nykyaikainen robotiikka Kenttä- ja palvelurobotit Robotti?? Robot 1: A robot is a re-programmable, multi-functional manipulator designed to move material, parts, tools, or specialized devices through variable
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 23.2.2016 Susanna Hurme Tervetuloa kurssille! Mitä on statiikka? Mitä on dynamiikka? Miksi niitä opiskellaan? Päivän aihe: Voiman käsite ja partikkelin tasapaino
KJR-C1001 Statiikka ja dynamiikka Luento 23.2.2016 Susanna Hurme Tervetuloa kurssille! Mitä on statiikka? Mitä on dynamiikka? Miksi niitä opiskellaan? Päivän aihe: Voiman käsite ja partikkelin tasapaino
Solmu 3/2001 Solmu 3/2001. Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä:
 Frégier n lause Simo K. Kivelä Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä: Suorakulmaisen kolmion kaikki kärjet sijaitsevat paraabelilla y = x 2 ; suoran kulman
Frégier n lause Simo K. Kivelä Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä: Suorakulmaisen kolmion kaikki kärjet sijaitsevat paraabelilla y = x 2 ; suoran kulman
Palauta jokainen funktio-tiedosto. Esitä myös funktiot vastauspaperissasi.
 Tehtävä 1 Kirjoita neljä eri funktiota (1/2 pistettä/funktio): 1. Funktio T tra saa herätteenä 3x1-kokoisen paikkavektorin p. Se palauttaa 4x4 muunnosmatriisin, johon sijoitettu p:n koordinaattien mukainen
Tehtävä 1 Kirjoita neljä eri funktiota (1/2 pistettä/funktio): 1. Funktio T tra saa herätteenä 3x1-kokoisen paikkavektorin p. Se palauttaa 4x4 muunnosmatriisin, johon sijoitettu p:n koordinaattien mukainen
Autonomisen liikkuvan koneen teknologiat. Hannu Mäkelä Navitec Systems Oy
 Autonomisen liikkuvan koneen teknologiat Hannu Mäkelä Navitec Systems Oy Autonomisuuden edellytykset itsenäinen toiminta ympäristön havainnointi ja mittaus liikkuminen ja paikannus toiminta mittausten
Autonomisen liikkuvan koneen teknologiat Hannu Mäkelä Navitec Systems Oy Autonomisuuden edellytykset itsenäinen toiminta ympäristön havainnointi ja mittaus liikkuminen ja paikannus toiminta mittausten
Taso 1/5 Sisältö ESITIEDOT: vektori, koordinaatistot, piste, suora
 Taso 1/5 Sisältö Taso geometrisena peruskäsitteenä Kolmiulotteisen alkeisgeometrian peruskäsitteisiin kuuluu taso pisteen ja suoran lisäksi. Intuitiivisesti sitä voidaan ajatella joka suunnassa äärettömyyteen
Taso 1/5 Sisältö Taso geometrisena peruskäsitteenä Kolmiulotteisen alkeisgeometrian peruskäsitteisiin kuuluu taso pisteen ja suoran lisäksi. Intuitiivisesti sitä voidaan ajatella joka suunnassa äärettömyyteen
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 29.3.2016 Susanna Hurme Yleisen tasoliikkeen kinematiikka: absoluuttinen ja suhteellinen liike, rajoitettu liike (Kirjan luvut 16.4-16.7) Osaamistavoitteet Ymmärtää,
KJR-C1001 Statiikka ja dynamiikka Luento 29.3.2016 Susanna Hurme Yleisen tasoliikkeen kinematiikka: absoluuttinen ja suhteellinen liike, rajoitettu liike (Kirjan luvut 16.4-16.7) Osaamistavoitteet Ymmärtää,
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 8 1 Suunnattu derivaatta Aluksi tarkastelemme vektoreita, koska ymmärrys vektoreista helpottaa alla olevien asioiden omaksumista. Kun liikutaan tasossa eli avaruudessa
Matematiikan tukikurssi Kurssikerta 8 1 Suunnattu derivaatta Aluksi tarkastelemme vektoreita, koska ymmärrys vektoreista helpottaa alla olevien asioiden omaksumista. Kun liikutaan tasossa eli avaruudessa
Lineaarialgebra MATH.1040 / voima
 Lineaarialgebra MATH.1040 / voima 1 Seuraavaksi määrittelemme kaksi vektoreille määriteltyä tuloa; pistetulo ja. Määritelmät ja erilaiset tulojen ominaisuudet saattavat tuntua, sekavalta kokonaisuudelta.
Lineaarialgebra MATH.1040 / voima 1 Seuraavaksi määrittelemme kaksi vektoreille määriteltyä tuloa; pistetulo ja. Määritelmät ja erilaiset tulojen ominaisuudet saattavat tuntua, sekavalta kokonaisuudelta.
Avaruuden kolme sellaista pistettä, jotka eivät sijaitse samalla suoralla, määräävät
 11 Taso Avaruuden kolme sellaista pistettä, jotka eivät sijaitse samalla suoralla, määräävät tason. Olkoot nämä pisteet P, B ja C. Merkitään vaikkapa P B r ja PC s. Tällöin voidaan sanoa, että vektorit
11 Taso Avaruuden kolme sellaista pistettä, jotka eivät sijaitse samalla suoralla, määräävät tason. Olkoot nämä pisteet P, B ja C. Merkitään vaikkapa P B r ja PC s. Tällöin voidaan sanoa, että vektorit
Laboratoriotyö. 1. Laitteisto. 1.1 Kamera
 Laboratoriotyö 1. Laitteisto 1.1 Kamera Järjestelmän kamerassa (Hitachi, VK-C77E) on CCD -kenno ja mahdollisuus kuvan asynkroniseen päivitykseen. Kamerassa on sarjaliitäntä, jonka kautta voidaan ohjata
Laboratoriotyö 1. Laitteisto 1.1 Kamera Järjestelmän kamerassa (Hitachi, VK-C77E) on CCD -kenno ja mahdollisuus kuvan asynkroniseen päivitykseen. Kamerassa on sarjaliitäntä, jonka kautta voidaan ohjata
Matematiikka ja teknologia, kevät 2011
 Matematiikka ja teknologia, kevät 2011 Peter Hästö 13. tammikuuta 2011 Matemaattisten tieteiden laitos Tarkoitus Kurssin tarkoituksena on tutustuttaa ja käydä läpi eräisiin teknologisiin sovelluksiin liittyvää
Matematiikka ja teknologia, kevät 2011 Peter Hästö 13. tammikuuta 2011 Matemaattisten tieteiden laitos Tarkoitus Kurssin tarkoituksena on tutustuttaa ja käydä läpi eräisiin teknologisiin sovelluksiin liittyvää
Vektorien pistetulo on aina reaaliluku. Esimerkiksi vektorien v = (3, 2, 0) ja w = (1, 2, 3) pistetulo on
 ja w = (1, 2, 3) pistetulo on") 13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
9. Vektorit. 9.1 Skalaarit ja vektorit. 9.2 Vektorit tasossa
 9. Vektorit 9.1 Skalaarit ja vektorit Skalaari on koon tai määrän mitta. Tyypillinen esimerkki skalaarista on massa. Lukumäärä on toinen hyvä esimerkki skalaarista. Vektorilla on taas suuruus ja suunta.
9. Vektorit 9.1 Skalaarit ja vektorit Skalaari on koon tai määrän mitta. Tyypillinen esimerkki skalaarista on massa. Lukumäärä on toinen hyvä esimerkki skalaarista. Vektorilla on taas suuruus ja suunta.
3 Suorat ja tasot. 3.1 Suora. Tässä luvussa käsitellään avaruuksien R 2 ja R 3 suoria ja tasoja vektoreiden näkökulmasta.
 3 Suorat ja tasot Tässä luvussa käsitellään avaruuksien R 2 ja R 3 suoria ja tasoja vektoreiden näkökulmasta. 3.1 Suora Havaitsimme skalaarikertolaskun tulkinnan yhteydessä, että jos on mikä tahansa nollasta
3 Suorat ja tasot Tässä luvussa käsitellään avaruuksien R 2 ja R 3 suoria ja tasoja vektoreiden näkökulmasta. 3.1 Suora Havaitsimme skalaarikertolaskun tulkinnan yhteydessä, että jos on mikä tahansa nollasta
Vektoreita GeoGebrassa.
 Vektoreita GeoGebrassa 1 Miten GeoGebralla piirretään vektoreita? Työvälineet ja syöttökentän komennot Vektoreiden esittäminen GeoGebrassa on luontevaa: vektorien piirtämiseen on kaksi työvälinettä vektoreita
Vektoreita GeoGebrassa 1 Miten GeoGebralla piirretään vektoreita? Työvälineet ja syöttökentän komennot Vektoreiden esittäminen GeoGebrassa on luontevaa: vektorien piirtämiseen on kaksi työvälinettä vektoreita
Suorista ja tasoista LaMa 1 syksyllä 2009
 Viidennen viikon luennot Suorista ja tasoista LaMa 1 syksyllä 2009 Perustuu kirjan Poole: Linear Algebra lukuihin I.3 - I.4 Esko Turunen esko.turunen@tut.fi Aluksi hiukan 2 ja 3 ulotteisen reaaliavaruuden
Viidennen viikon luennot Suorista ja tasoista LaMa 1 syksyllä 2009 Perustuu kirjan Poole: Linear Algebra lukuihin I.3 - I.4 Esko Turunen esko.turunen@tut.fi Aluksi hiukan 2 ja 3 ulotteisen reaaliavaruuden
STATIIKKA. TF00BN89 5op
 STATIIKKA TF00BN89 5op Sisältö: Statiikan peruslait Voiman resultantti ja jako komponentteihin Voiman momentti ja voimapari Partikkelin ja jäykän kappaleen tasapainoyhtälöt Tukivoimat Ristikot, palkit
STATIIKKA TF00BN89 5op Sisältö: Statiikan peruslait Voiman resultantti ja jako komponentteihin Voiman momentti ja voimapari Partikkelin ja jäykän kappaleen tasapainoyhtälöt Tukivoimat Ristikot, palkit
Ota tämä paperi mukaan, merkkaa siihen omat vastauksesi ja tarkista oikeat vastaukset klo 11:30 jälkeen osoitteesta
 MAA5.2 Loppukoe 26.9.2012 Jussi Tyni Valitse 6 tehtävää Muista merkitä vastauspaperiin oma nimesi ja tee etusivulle pisteytysruudukko Kaikkiin tehtävien ratkaisuihin välivaiheet näkyviin! 1. Olkoon vektorit
MAA5.2 Loppukoe 26.9.2012 Jussi Tyni Valitse 6 tehtävää Muista merkitä vastauspaperiin oma nimesi ja tee etusivulle pisteytysruudukko Kaikkiin tehtävien ratkaisuihin välivaiheet näkyviin! 1. Olkoon vektorit
Luento 4: Kiertomatriisi
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 22.3.2016 Susanna Hurme Päivän aihe: Rotaatioliikkeen kinematiikka: kulmanopeus ja -kiihtyvyys (Kirjan luvut 12.7, 16.3) Osaamistavoitteet Osata analysoida jäykän
KJR-C1001 Statiikka ja dynamiikka Luento 22.3.2016 Susanna Hurme Päivän aihe: Rotaatioliikkeen kinematiikka: kulmanopeus ja -kiihtyvyys (Kirjan luvut 12.7, 16.3) Osaamistavoitteet Osata analysoida jäykän
Luento 3: 3D katselu. Sisältö
 Tietokonegrafiikan perusteet T-.43 3 op Luento 3: 3D katselu Lauri Savioja Janne Kontkanen /27 3D katselu / Sisältö Kertaus: koordinaattimuunnokset ja homogeeniset koordinaatit Näkymänmuodostus Kameran
Tietokonegrafiikan perusteet T-.43 3 op Luento 3: 3D katselu Lauri Savioja Janne Kontkanen /27 3D katselu / Sisältö Kertaus: koordinaattimuunnokset ja homogeeniset koordinaatit Näkymänmuodostus Kameran
2.3 Voiman jakaminen komponentteihin
 Seuraavissa kappaleissa tarvitaan aina silloin tällöin taitoa jakaa voima komponentteihin sekä myös taitoa suorittaa sille vastakkainen operaatio eli voimien resultantin eli kokonaisvoiman laskeminen.
Seuraavissa kappaleissa tarvitaan aina silloin tällöin taitoa jakaa voima komponentteihin sekä myös taitoa suorittaa sille vastakkainen operaatio eli voimien resultantin eli kokonaisvoiman laskeminen.
Tuotantosolun simulointi
 Antti Alonen RFID -Tekniikan soveltaminen tuotantoteollisuudessa -hanke Tuotantosolun simulointi Konetekniikan TKI-yksikkö Tutkimus- ja kehityspalveluja sekä perusopetusta tukevaa toimintaa Toimialueet
Antti Alonen RFID -Tekniikan soveltaminen tuotantoteollisuudessa -hanke Tuotantosolun simulointi Konetekniikan TKI-yksikkö Tutkimus- ja kehityspalveluja sekä perusopetusta tukevaa toimintaa Toimialueet
16.9. RFID-tekniikka. Kari Hänninen, Finn-ID Oy. Konenäkö. Harri Ahlroth, Oy Delta-Enteprise Ltd.
 Luento-ohjelma 8.9. Kurssin esittely ja johdanto. Kappaleiden tunnistus ja idenfiointi. 16.9. RFID-tekniikka. Kari Hänninen, Finn-ID Oy. Konenäkö. Harri Ahlroth, Oy Delta-Enteprise Ltd. 23.9. Ohjelmoitavat
Luento-ohjelma 8.9. Kurssin esittely ja johdanto. Kappaleiden tunnistus ja idenfiointi. 16.9. RFID-tekniikka. Kari Hänninen, Finn-ID Oy. Konenäkö. Harri Ahlroth, Oy Delta-Enteprise Ltd. 23.9. Ohjelmoitavat
PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9.2.2011
 PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9..0 Kokeessa saa vastata enintään kymmeneen tehtävään.. Sievennä a) 9 x x 6x + 9, b) 5 9 009 a a, c) log 7 + lne 7. Muovailuvahasta tehty säännöllinen tetraedri muovataan
PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9..0 Kokeessa saa vastata enintään kymmeneen tehtävään.. Sievennä a) 9 x x 6x + 9, b) 5 9 009 a a, c) log 7 + lne 7. Muovailuvahasta tehty säännöllinen tetraedri muovataan
BM20A5800 Funktiot, lineaarialgebra ja vektorit Harjoitus 4, Syksy 2016
 BM20A5800 Funktiot, lineaarialgebra ja vektorit Harjoitus 4, Syksy 2016 1. Hahmottele karkeasti funktion f : R R 2 piirtämällä sen arvoja muutamilla eri muuttujan arvoilla kaksiulotteiseen koordinaatistoon
BM20A5800 Funktiot, lineaarialgebra ja vektorit Harjoitus 4, Syksy 2016 1. Hahmottele karkeasti funktion f : R R 2 piirtämällä sen arvoja muutamilla eri muuttujan arvoilla kaksiulotteiseen koordinaatistoon
Suorat ja tasot, L6. Suuntajana. Suora xy-tasossa. Suora xyzkoordinaatistossa. Taso xyzkoordinaatistossa. Tason koordinaattimuotoinen yhtälö.
 Suorat ja tasot, L6 Suora xyz-koordinaatistossa Taso xyz-koordinaatistossa stä stä 1 Näillä kalvoilla käsittelemme kolmen laisia olioita. Suora xyz-avaruudessa. Taso xyz-avaruudessa. Emme nyt ryhdy pohtimaan,
Suorat ja tasot, L6 Suora xyz-koordinaatistossa Taso xyz-koordinaatistossa stä stä 1 Näillä kalvoilla käsittelemme kolmen laisia olioita. Suora xyz-avaruudessa. Taso xyz-avaruudessa. Emme nyt ryhdy pohtimaan,
Muodonmuutostila hum 30.8.13
 Muodonmuutostila Tarkastellaan kuvan 1 kappaletta Ω, jonka pisteet siirtvät ulkoisen kuormituksen johdosta siten, että siirtmien tapahduttua ne muodostavat kappaleen Ω'. Esimerkiksi piste A siirt asemaan
Muodonmuutostila Tarkastellaan kuvan 1 kappaletta Ω, jonka pisteet siirtvät ulkoisen kuormituksen johdosta siten, että siirtmien tapahduttua ne muodostavat kappaleen Ω'. Esimerkiksi piste A siirt asemaan
Lauseen erikoistapaus on ollut kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa seuraavassa muodossa:
 Simo K. Kivelä, 13.7.004 Frégier'n lause Toisen asteen käyrillä ellipseillä, paraabeleilla, hyperbeleillä ja niiden erikoistapauksilla on melkoinen määrä yksinkertaisia säännöllisyysominaisuuksia. Eräs
Simo K. Kivelä, 13.7.004 Frégier'n lause Toisen asteen käyrillä ellipseillä, paraabeleilla, hyperbeleillä ja niiden erikoistapauksilla on melkoinen määrä yksinkertaisia säännöllisyysominaisuuksia. Eräs
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 2017 Insinöörivalinnan matematiikan koe , Ratkaisut (Sarja A)
") Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 017 Insinöörivalinnan matematiikan koe 30..017, Ratkaisut (Sarja A) 1. a) Lukujen 9, 0, 3 ja x keskiarvo on. Määritä x. (1 p.) b) Mitkä reaaliluvut
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 017 Insinöörivalinnan matematiikan koe 30..017, Ratkaisut (Sarja A) 1. a) Lukujen 9, 0, 3 ja x keskiarvo on. Määritä x. (1 p.) b) Mitkä reaaliluvut
 1. Algoritmi 1.1 Sisällys Algoritmin määritelmä. Aiheen pariin johdatteleva esimerkki. Muuttujat ja operaatiot (sijoitus, aritmetiikka ja vertailu). Algoritmista ohjelmaksi. 1.2 Algoritmin määritelmä Ohjelmointi
1. Algoritmi 1.1 Sisällys Algoritmin määritelmä. Aiheen pariin johdatteleva esimerkki. Muuttujat ja operaatiot (sijoitus, aritmetiikka ja vertailu). Algoritmista ohjelmaksi. 1.2 Algoritmin määritelmä Ohjelmointi
Insinöörimatematiikka D, laskuharjoituksien esimerkkiratkaisut
 Insinöörimatematiikka D, 29.3.2016 4. laskuharjoituksien esimerkkiratkaisut 1. Olkoon u (4,0,4,2) ja v ( 1,1,3,5) vektoreita vektoriavaruudessa R 4. Annetun sisätulon (x,y) indusoima normi on x (x,x) ja
Insinöörimatematiikka D, 29.3.2016 4. laskuharjoituksien esimerkkiratkaisut 1. Olkoon u (4,0,4,2) ja v ( 1,1,3,5) vektoreita vektoriavaruudessa R 4. Annetun sisätulon (x,y) indusoima normi on x (x,x) ja
etunimi, sukunimi ja opiskelijanumero ja näillä
 Sisällys 1. Algoritmi Algoritmin määritelmä. Aiheen pariin johdatteleva esimerkki. ja operaatiot (sijoitus, aritmetiikka ja vertailu). Algoritmista ohjelmaksi. 1.1 1.2 Algoritmin määritelmä Ohjelmointi
Sisällys 1. Algoritmi Algoritmin määritelmä. Aiheen pariin johdatteleva esimerkki. ja operaatiot (sijoitus, aritmetiikka ja vertailu). Algoritmista ohjelmaksi. 1.1 1.2 Algoritmin määritelmä Ohjelmointi
Yleistä vektoreista GeoGebralla
 Vektoreita GeoGebralla Vektoreilla voi laskea joko komentopohjaisesti esim. CAS-ikkunassa tai piirtämällä piirtoikkunassa. Ensimmäisen tavan etuna on, että laskujen tueksi muodostuu kuva. Tästä on varmasti
Vektoreita GeoGebralla Vektoreilla voi laskea joko komentopohjaisesti esim. CAS-ikkunassa tai piirtämällä piirtoikkunassa. Ensimmäisen tavan etuna on, että laskujen tueksi muodostuu kuva. Tästä on varmasti
1. Olkoot vektorit a, b ja c seuraavasti määritelty: a) Määritä vektori. sekä laske sen pituus.
 Määritä vektori. sekä laske sen pituus.") Matematiikan kurssikoe, Maa4 Vektorit RATKAISUT Sievin lukio Keskiviikko 12.4.2017 VASTAA YHTEENSÄ VIITEEN TEHTÄVÄÄN! MAOL JA LASKIN/LAS- KINOHJELMAT OVAT SALLITTUJA! 1. Olkoot vektorit a, b ja c seuraavasti
Matematiikan kurssikoe, Maa4 Vektorit RATKAISUT Sievin lukio Keskiviikko 12.4.2017 VASTAA YHTEENSÄ VIITEEN TEHTÄVÄÄN! MAOL JA LASKIN/LAS- KINOHJELMAT OVAT SALLITTUJA! 1. Olkoot vektorit a, b ja c seuraavasti
ROBOTIIKKA (2016) 1. JOHDANTO JA HISTORIAA
 1. JOHDANTO JA HISTORIAA") ROBOTIIKKA 1. JOHDANTO JA HISTORIAA... 2 2. ROBOTTITYYPIT JA RAKENTEET..8 2.1 Yleistä... 8 2.2 Teollisuusrobotiikka... 12 2.2.1 Suorakulmaiset robotit... 12 2.2.2 Scara - robotit... 13 2.2.3 Kiertyväniveliset
ROBOTIIKKA 1. JOHDANTO JA HISTORIAA... 2 2. ROBOTTITYYPIT JA RAKENTEET..8 2.1 Yleistä... 8 2.2 Teollisuusrobotiikka... 12 2.2.1 Suorakulmaiset robotit... 12 2.2.2 Scara - robotit... 13 2.2.3 Kiertyväniveliset
Suora 1/5 Sisältö ESITIEDOT: vektori, koordinaatistot, piste
 Suora 1/5 Sisältö KATSO MYÖS:, vektorialgebra, geometriset probleemat, taso Suora geometrisena peruskäsitteenä Pisteen ohella suora on geometrinen peruskäsite, jota varsinaisesti ei määritellä. Alkeisgeometriassa
Suora 1/5 Sisältö KATSO MYÖS:, vektorialgebra, geometriset probleemat, taso Suora geometrisena peruskäsitteenä Pisteen ohella suora on geometrinen peruskäsite, jota varsinaisesti ei määritellä. Alkeisgeometriassa
FlyMarker PRO merkintälaite. Mark like a Professional
 FlyMarker PRO merkintälaite Mark like a Professional Mark like a Professional FlyMarker PRO Mobile Kannettavan FlyMarker PRO merkintälaitteen avulla suurten, raskaiden ja vaikeasti liikuteltavien kappaleiden
FlyMarker PRO merkintälaite Mark like a Professional Mark like a Professional FlyMarker PRO Mobile Kannettavan FlyMarker PRO merkintälaitteen avulla suurten, raskaiden ja vaikeasti liikuteltavien kappaleiden
DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi
 Arttu Polojärvi") DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Suhteellisen liikkeen nopeuden ja kiihtyvyyden yhtälöt. Jäykän kappaleen partikkelin liike. Jäykän
DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Suhteellisen liikkeen nopeuden ja kiihtyvyyden yhtälöt. Jäykän kappaleen partikkelin liike. Jäykän
Robotteja liikenteessä
 Robotteja liikenteessä Mikä on robotti? Hoitaako robotit tulevaisuudessa ihmisten työt? Kuinka monta robottia tarvitaan vaihtamaan lamppu? PROJEKTITÖIDEN AIHEET (noin 3 hlöä/ryhmä) Teollisuusrobotit (industrial
Robotteja liikenteessä Mikä on robotti? Hoitaako robotit tulevaisuudessa ihmisten työt? Kuinka monta robottia tarvitaan vaihtamaan lamppu? PROJEKTITÖIDEN AIHEET (noin 3 hlöä/ryhmä) Teollisuusrobotit (industrial
VALMISTUSTEKNIIKAN JATKOKURSSI 2006 Koneistettavan kappaleen mallintaminen ja työstön ohjelmointi
 VALMISTUSTEKNIIKAN JATKOKURSSI 2006 Koneistettavan kappaleen mallintaminen ja työstön ohjelmointi 1. Mitä mallinnetaan ja miksi? 2-ulotteisen muotoviivan avulla tehtävät muodot kuten taskujen jyrsinnät
VALMISTUSTEKNIIKAN JATKOKURSSI 2006 Koneistettavan kappaleen mallintaminen ja työstön ohjelmointi 1. Mitä mallinnetaan ja miksi? 2-ulotteisen muotoviivan avulla tehtävät muodot kuten taskujen jyrsinnät
Teoreettisia perusteita II
 Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
RYHMÄKERROIN ÄÄNILÄHDERYHMÄN SUUNTAAVUUDEN
 ÄÄNILÄHDERYHMÄN SUUNTAAVUUDEN ARVIOINNISSA Seppo Uosukainen, Jukka Tanttari, Heikki Isomoisio, Esa Nousiainen, Ville Veijanen, Virpi Hankaniemi VTT PL, 44 VTT etunimi.sukunimi@vtt.fi Wärtsilä Finland Oy
ÄÄNILÄHDERYHMÄN SUUNTAAVUUDEN ARVIOINNISSA Seppo Uosukainen, Jukka Tanttari, Heikki Isomoisio, Esa Nousiainen, Ville Veijanen, Virpi Hankaniemi VTT PL, 44 VTT etunimi.sukunimi@vtt.fi Wärtsilä Finland Oy
MS-A0003/A0005 Matriisilaskenta Malliratkaisut 4 / vko 47
 MS-A3/A5 Matriisilaskenta Malliratkaisut 4 / vko 47 Tehtävä 1 (L): Oletetaan, että AB = AC, kun B ja C ovat m n-matriiseja. a) Näytä, että jos A on kääntyvä, niin B = C. b) Seuraako yhtälöstä AB = AC yhtälö
MS-A3/A5 Matriisilaskenta Malliratkaisut 4 / vko 47 Tehtävä 1 (L): Oletetaan, että AB = AC, kun B ja C ovat m n-matriiseja. a) Näytä, että jos A on kääntyvä, niin B = C. b) Seuraako yhtälöstä AB = AC yhtälö
MIKKO KASARI TUOTANTOLAITOKSEN LAVAUSJÄRJESTELMÄN KEHITTÄMI- NEN. Diplomityö
 MIKKO KASARI TUOTANTOLAITOKSEN LAVAUSJÄRJESTELMÄN KEHITTÄMI- NEN Diplomityö Tarkastaja: professori Matti Vilkko Tarkastaja ja aihe hyväksytty Automaatio-, kone- ja materiaalitekniikan tiedekuntaneuvoston
MIKKO KASARI TUOTANTOLAITOKSEN LAVAUSJÄRJESTELMÄN KEHITTÄMI- NEN Diplomityö Tarkastaja: professori Matti Vilkko Tarkastaja ja aihe hyväksytty Automaatio-, kone- ja materiaalitekniikan tiedekuntaneuvoston
LIITE. asiakirjaan. komission delegoitu asetus
 EUROOPAN KOMISSIO Bryssel 12.10.2015 C(2015) 6823 final ANNEX 1 PART 6/11 LIITE asiakirjaan komission delegoitu asetus kaksikäyttötuotteiden vientiä, siirtoa, välitystä ja kauttakulkua koskevan yhteisön
EUROOPAN KOMISSIO Bryssel 12.10.2015 C(2015) 6823 final ANNEX 1 PART 6/11 LIITE asiakirjaan komission delegoitu asetus kaksikäyttötuotteiden vientiä, siirtoa, välitystä ja kauttakulkua koskevan yhteisön
3D animaatio: liikekäyrät ja interpolointi. Tommi Tykkälä
 3D animaatio: liikekäyrät ja interpolointi Tommi Tykkälä Läpivienti Keyframe-animaatio Lineaarisesta interpoloinnista TCB-splineihin Bezier-käyrät Rotaatioiden interpolointi Kameran animointi Skenegraafit
3D animaatio: liikekäyrät ja interpolointi Tommi Tykkälä Läpivienti Keyframe-animaatio Lineaarisesta interpoloinnista TCB-splineihin Bezier-käyrät Rotaatioiden interpolointi Kameran animointi Skenegraafit
Altus RTS. 1 Tekniset tiedot: 2 Lähetin: Telis 1 Telis 4 Centralis RTS
 Viitteet 000071 - Fi ASENNUS ohje Altus RTS Elektronisesti ohjattu putkimoottori, jossa RTSradiovastaanotin, aurinko- & tuuliautomatiikka SOMFY Altus RTS on putkimoottori, jonka rakenteeseen kuuluvat RTS-radiovastaanotin,
Viitteet 000071 - Fi ASENNUS ohje Altus RTS Elektronisesti ohjattu putkimoottori, jossa RTSradiovastaanotin, aurinko- & tuuliautomatiikka SOMFY Altus RTS on putkimoottori, jonka rakenteeseen kuuluvat RTS-radiovastaanotin,
Suora. Määritelmä. Oletetaan, että n = 2 tai n = 3. Avaruuden R n suora on joukko. { p + t v t R},
 Määritelmä Suora Oletetaan, että n = 2 tai n = 3. Avaruuden R n suora on joukko { p + t v t R}, missä p, v R n ja v 0. Tässä p on suoran jonkin pisteen paikkavektori ja v on suoran suuntavektori. v p LM1,
Määritelmä Suora Oletetaan, että n = 2 tai n = 3. Avaruuden R n suora on joukko { p + t v t R}, missä p, v R n ja v 0. Tässä p on suoran jonkin pisteen paikkavektori ja v on suoran suuntavektori. v p LM1,
S11-09 Control System for an. Autonomous Household Robot Platform
 S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
Peilaus pisteen ja suoran suhteen Pythonin Turtle moduulilla
 Peilaus pisteen ja suoran suhteen Pythonin Turtle moduulilla ALKUHARJOITUS Kynän ja paperin avulla peilaaminen koordinaatistossa a) Peilaa pisteen (0,0) suhteen koordinaatistossa sijaitseva - neliö, jonka
Peilaus pisteen ja suoran suhteen Pythonin Turtle moduulilla ALKUHARJOITUS Kynän ja paperin avulla peilaaminen koordinaatistossa a) Peilaa pisteen (0,0) suhteen koordinaatistossa sijaitseva - neliö, jonka
Harjoitus 1: Matlab. Harjoitus 1: Matlab. Mat Sovelletun matematiikan tietokonetyöt 1. Syksy 2006
 Harjoitus 1: Matlab Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen Matlab-ohjelmistoon Laskutoimitusten
Harjoitus 1: Matlab Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen Matlab-ohjelmistoon Laskutoimitusten
Luento 10: Työ, energia ja teho. Johdanto Työ ja kineettinen energia Teho
 Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho 1 / 23 Luennon sisältö Johdanto Työ ja kineettinen energia Teho 2 / 23 Johdanto Energia suure, joka voidaan muuttaa muodosta toiseen,
Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho 1 / 23 Luennon sisältö Johdanto Työ ja kineettinen energia Teho 2 / 23 Johdanto Energia suure, joka voidaan muuttaa muodosta toiseen,
Tekijä Pitkä matematiikka Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4).
, ( 2,1), (1, 0), (4, 1) ja ( 11, 4).") Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Satelliittipaikannus
 Kolme maailmalaajuista järjestelmää 1. GPS (USAn puolustusministeriö) Täydessä laajuudessaan toiminnassa v. 1994. http://www.navcen.uscg.gov/gps/default.htm 2. GLONASS (Venäjän hallitus) Ilmeisesti 11
Kolme maailmalaajuista järjestelmää 1. GPS (USAn puolustusministeriö) Täydessä laajuudessaan toiminnassa v. 1994. http://www.navcen.uscg.gov/gps/default.htm 2. GLONASS (Venäjän hallitus) Ilmeisesti 11
Ohjelmistoradio. Mikä se on:
 1 Mikä se on: SDR = Software Defined Radio radio, jossa ohjelmisto määrittelee toiminnot ja ominaisuudet: otaajuusalue olähetelajit (modulaatio) olähetysteho etuna joustavuus, jota tarvitaan sovelluksissa,
1 Mikä se on: SDR = Software Defined Radio radio, jossa ohjelmisto määrittelee toiminnot ja ominaisuudet: otaajuusalue olähetelajit (modulaatio) olähetysteho etuna joustavuus, jota tarvitaan sovelluksissa,
Vektorit. Kertausta 12.3.2013 Seppo Lustig (Lähde: avoinoppikirja.fi)
") Vektorit Kertausta 12.3.2013 Seppo Lustig (Lähde: avoinoppikirja.fi) Sisällys Vektorit Nimeäminen Vektorien kertolasku Vektorien yhteenlasku Suuntasopimus Esimerkki: laivan nopeus Vektorit Vektoreilla
Vektorit Kertausta 12.3.2013 Seppo Lustig (Lähde: avoinoppikirja.fi) Sisällys Vektorit Nimeäminen Vektorien kertolasku Vektorien yhteenlasku Suuntasopimus Esimerkki: laivan nopeus Vektorit Vektoreilla
2 Pistejoukko koordinaatistossa
 Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
I Geometrian rakentaminen pisteestä lähtien
 I Geometrian rakentaminen pisteestä lähtien Koko geometrian voidaan ajatella koostuvan pisteistä. a) Matemaattinen piste on sellainen, millä EI OLE LAINKAAN ULOTTUVUUKSIA. Oppilaita voi johdatella pisteen
I Geometrian rakentaminen pisteestä lähtien Koko geometrian voidaan ajatella koostuvan pisteistä. a) Matemaattinen piste on sellainen, millä EI OLE LAINKAAN ULOTTUVUUKSIA. Oppilaita voi johdatella pisteen
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
MATEMATIIKKA 5 VIIKKOTUNTIA. PÄIVÄMÄÄRÄ: 8. kesäkuuta 2009
 EB-TUTKINTO 2009 MATEMATIIKKA 5 VIIKKOTUNTIA PÄIVÄMÄÄRÄ: 8. kesäkuuta 2009 KOKEEN KESTO: 4 tuntia (240 minuuttia) SALLITUT APUVÄLINEET: Eurooppa-koulun antama taulukkovihkonen Funktiolaskin, joka ei saa
EB-TUTKINTO 2009 MATEMATIIKKA 5 VIIKKOTUNTIA PÄIVÄMÄÄRÄ: 8. kesäkuuta 2009 KOKEEN KESTO: 4 tuntia (240 minuuttia) SALLITUT APUVÄLINEET: Eurooppa-koulun antama taulukkovihkonen Funktiolaskin, joka ei saa
Tuotteen hitsattavuuden testaus robottisimulointiohjelmalla. Kari Solehmainen Savonia Ammattikorkeakoulu HitSavonia
 Tuotteen hitsattavuuden testaus robottisimulointiohjelmalla Kari Solehmainen Savonia Ammattikorkeakoulu HitSavonia Sisältö Yhtenäissuunnittelu (Concurrent engineering) Mallinnus ja simulointi Robottihitsauksen
Tuotteen hitsattavuuden testaus robottisimulointiohjelmalla Kari Solehmainen Savonia Ammattikorkeakoulu HitSavonia Sisältö Yhtenäissuunnittelu (Concurrent engineering) Mallinnus ja simulointi Robottihitsauksen
Luento 6: 3-D koordinaatit
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 16.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinetiikka (Kirjan luvut 12.6, 13.1-13.3 ja 17.3) Oppimistavoitteet Ymmärtää, miten Newtonin toisen lain
KJR-C1001 Statiikka ja dynamiikka Luento 16.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinetiikka (Kirjan luvut 12.6, 13.1-13.3 ja 17.3) Oppimistavoitteet Ymmärtää, miten Newtonin toisen lain
Numeeriset menetelmät
 Numeeriset menetelmät Luento 3 Ti 13.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 3 Ti 13.9.2011 p. 1/37 p. 1/37 Epälineaariset yhtälöt Newtonin menetelmä: x n+1 = x n f(x n) f (x n ) Sekanttimenetelmä:
Numeeriset menetelmät Luento 3 Ti 13.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 3 Ti 13.9.2011 p. 1/37 p. 1/37 Epälineaariset yhtälöt Newtonin menetelmä: x n+1 = x n f(x n) f (x n ) Sekanttimenetelmä:
TigerStop Standard Digitaalinen Syöttölaite / Stoppari
 Perkkoonkatu 5 Puh. 010 420 72 72 www.keyway.fi 33850 Tampere Fax. 010 420 72 77 palvelu@keyway.fi TigerStop Standard Digitaalinen Syöttölaite / Stoppari Malli Työpituus Kokonaispituus Standardi mm mm
Perkkoonkatu 5 Puh. 010 420 72 72 www.keyway.fi 33850 Tampere Fax. 010 420 72 77 palvelu@keyway.fi TigerStop Standard Digitaalinen Syöttölaite / Stoppari Malli Työpituus Kokonaispituus Standardi mm mm
Talousmatematiikan perusteet: Luento 10. Lineaarikuvaus Matriisin aste Determinantti Käänteismatriisi
 Talousmatematiikan perusteet: Luento 10 Lineaarikuvaus Matriisin aste Determinantti Käänteismatriisi Lineaarikuvaus Esim. Yritys tekee elintarviketeollisuuden käyttämää puolivalmistetta, jossa käytetään
Talousmatematiikan perusteet: Luento 10 Lineaarikuvaus Matriisin aste Determinantti Käänteismatriisi Lineaarikuvaus Esim. Yritys tekee elintarviketeollisuuden käyttämää puolivalmistetta, jossa käytetään
Integrointialgoritmit molekyylidynamiikassa
 Integrointialgoritmit molekyylidynamiikassa Markus Ovaska 28.11.2008 Esitelmän kulku MD-simulaatiot yleisesti Integrointialgoritmit: mitä integroidaan ja miten? Esimerkkejä eri algoritmeista Hyvän algoritmin
Integrointialgoritmit molekyylidynamiikassa Markus Ovaska 28.11.2008 Esitelmän kulku MD-simulaatiot yleisesti Integrointialgoritmit: mitä integroidaan ja miten? Esimerkkejä eri algoritmeista Hyvän algoritmin
Robottien etäohjelmointiprojektin toteutus
 Robottien etäohjelmointiprojektin toteutus Moduuli 4: Hitsausprosessit ja hitsausrobotin ohjelmointi Robottihitsauksen tuottavuus ja tehokas käyttö Heikki Aalto ja Ari Lylynoja Esitelmän sisältö Mikä on
Robottien etäohjelmointiprojektin toteutus Moduuli 4: Hitsausprosessit ja hitsausrobotin ohjelmointi Robottihitsauksen tuottavuus ja tehokas käyttö Heikki Aalto ja Ari Lylynoja Esitelmän sisältö Mikä on
Keräilyrobotit. Helander, Koskimäki, Saari, Turunen. Aalto-yliopisto Insinööritieteiden korkeakoulu Kon Tuotantoautomaatio
 Keräilyrobotit Helander, Koskimäki, Saari, Turunen Aalto-yliopisto Insinööritieteiden korkeakoulu Kon-15.4119 Tuotantoautomaatio 21.10.2015 Agenda 1. Yleistä robotisoinnista 2. Keräilyrobotit - Nivelvarsirobotti
Keräilyrobotit Helander, Koskimäki, Saari, Turunen Aalto-yliopisto Insinööritieteiden korkeakoulu Kon-15.4119 Tuotantoautomaatio 21.10.2015 Agenda 1. Yleistä robotisoinnista 2. Keräilyrobotit - Nivelvarsirobotti
TIETOJEN TUONTI TIETOKANNASTA + PIVOT-TAULUKON JA OLAP-KUUTION TEKO
 TIETOJEN TUONTI TIETOKANNASTA + PIVOT-TAULUKON JA OLAP-KUUTION TEKO JOUNI HUOTARI 2005-2010 OLAP-OHJETEKSTIT KOPIOITU MICROSOFTIN OHJATUN OLAP-KUUTION TEKO-OHJEESTA ESIMERKIN KUVAUS JA OLAP-MÄÄRITELMÄ
TIETOJEN TUONTI TIETOKANNASTA + PIVOT-TAULUKON JA OLAP-KUUTION TEKO JOUNI HUOTARI 2005-2010 OLAP-OHJETEKSTIT KOPIOITU MICROSOFTIN OHJATUN OLAP-KUUTION TEKO-OHJEESTA ESIMERKIN KUVAUS JA OLAP-MÄÄRITELMÄ
 MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
Vaatimusmäärittely Ohjelma-ajanvälitys komponentti
 Teknillinen korkeakoulu 51 Vaatimusmäärittely Ohjelma-ajanvälitys komponentti Versio Päiväys Tekijä Kuvaus 0.1 21.11.01 Oskari Pirttikoski Ensimmäinen versio 0.2 27.11.01 Oskari Pirttikoski Lisätty termit
Teknillinen korkeakoulu 51 Vaatimusmäärittely Ohjelma-ajanvälitys komponentti Versio Päiväys Tekijä Kuvaus 0.1 21.11.01 Oskari Pirttikoski Ensimmäinen versio 0.2 27.11.01 Oskari Pirttikoski Lisätty termit
Jouni Huotari OLAP-ohjetekstit kopioitu Microsoftin ohjatun OLAP-kuution teko-ohjeesta. Esimerkin kuvaus ja OLAP-määritelmä
 OLAP-kuution teko Jouni Huotari OLAP-ohjetekstit kopioitu Microsoftin ohjatun OLAP-kuution teko-ohjeesta Esimerkin kuvaus ja OLAP-määritelmä Tavoitteena on luoda OLAP-kuutio Northwind-tietokannan tilaustiedoista
OLAP-kuution teko Jouni Huotari OLAP-ohjetekstit kopioitu Microsoftin ohjatun OLAP-kuution teko-ohjeesta Esimerkin kuvaus ja OLAP-määritelmä Tavoitteena on luoda OLAP-kuutio Northwind-tietokannan tilaustiedoista
Määrittelydokumentti
 Määrittelydokumentti Aineopintojen harjoitustyö: Tietorakenteet ja algoritmit (alkukesä) Sami Korhonen 014021868 sami.korhonen@helsinki. Tietojenkäsittelytieteen laitos Helsingin yliopisto 23. kesäkuuta
Määrittelydokumentti Aineopintojen harjoitustyö: Tietorakenteet ja algoritmit (alkukesä) Sami Korhonen 014021868 sami.korhonen@helsinki. Tietojenkäsittelytieteen laitos Helsingin yliopisto 23. kesäkuuta
Neliömatriisi A on ortogonaalinen (eli ortogonaalimatriisi), jos sen alkiot ovat reaalisia ja
, jos sen alkiot ovat reaalisia ja") 7 NELIÖMATRIISIN DIAGONALISOINTI. Ortogonaaliset matriisit Neliömatriisi A on ortogonaalinen (eli ortogonaalimatriisi), jos sen alkiot ovat reaalisia ja A - = A T () Muistutus: Kokoa n olevien vektorien
7 NELIÖMATRIISIN DIAGONALISOINTI. Ortogonaaliset matriisit Neliömatriisi A on ortogonaalinen (eli ortogonaalimatriisi), jos sen alkiot ovat reaalisia ja A - = A T () Muistutus: Kokoa n olevien vektorien
Aki Taanila LINEAARINEN OPTIMOINTI
 Aki Taanila LINEAARINEN OPTIMOINTI 26.4.2011 JOHDANTO Tässä monisteessa esitetään lineaarisen optimoinnin alkeet. Moniste sisältää tarvittavat Excel ohjeet. Viimeisin versio tästä monisteesta ja siihen
Aki Taanila LINEAARINEN OPTIMOINTI 26.4.2011 JOHDANTO Tässä monisteessa esitetään lineaarisen optimoinnin alkeet. Moniste sisältää tarvittavat Excel ohjeet. Viimeisin versio tästä monisteesta ja siihen
Oppimistavoitematriisi
 Oppimistavoitematriisi Lineaarialgebra ja matriisilaskenta I Esitiedot Arvosanaan 1 2 riittävät Arvosanaan 3 4 riittävät Arvosanaan 5 riittävät Yhtälöryhmät (YR) Osaan ratkaista ensimmäisen asteen yhtälöitä
Oppimistavoitematriisi Lineaarialgebra ja matriisilaskenta I Esitiedot Arvosanaan 1 2 riittävät Arvosanaan 3 4 riittävät Arvosanaan 5 riittävät Yhtälöryhmät (YR) Osaan ratkaista ensimmäisen asteen yhtälöitä
Digikamera. Perustietoa digikamerasta ja kuvien siirtämisestä tietokoneelle
 TEEMA 1 Tietokoneen peruskäyttö Digikamera Perustietoa digikamerasta ja kuvien siirtämisestä tietokoneelle Tämä tietopaketti hahmottaa lukijalle, millä tavalla kuvat voidaan siirtää kamerakännykästä tai
TEEMA 1 Tietokoneen peruskäyttö Digikamera Perustietoa digikamerasta ja kuvien siirtämisestä tietokoneelle Tämä tietopaketti hahmottaa lukijalle, millä tavalla kuvat voidaan siirtää kamerakännykästä tai
Robotiikan tulevaisuus ja turvallisuus
 Robotiikan tulevaisuus ja turvallisuus NWE 2014 Satelliittiseminaari 4.11.2014 Jyrki Latokartano TTY Kone- ja Tuotantotekniikan laitos Suomen Robotiikkayhdistys ry Robottiturvallisuus? Kohti ihmisen ja
Robotiikan tulevaisuus ja turvallisuus NWE 2014 Satelliittiseminaari 4.11.2014 Jyrki Latokartano TTY Kone- ja Tuotantotekniikan laitos Suomen Robotiikkayhdistys ry Robottiturvallisuus? Kohti ihmisen ja
NC-koneet ja niiden ohjelmointi
 NC-koneet ja niiden ohjelmointi Koordinaattisysteemit Inkrementaalinen Absoluuttinen NC-koneen koordinaatisto Akselien suunnat on määritelty ns. "oikean käden säännön" mukaan (DIN 66217). Koneen edessä
NC-koneet ja niiden ohjelmointi Koordinaattisysteemit Inkrementaalinen Absoluuttinen NC-koneen koordinaatisto Akselien suunnat on määritelty ns. "oikean käden säännön" mukaan (DIN 66217). Koneen edessä
Maastotietokannan torrent-jakelun shapefile-tiedostojen purkaminen zip-arkistoista Windows-komentojonoilla
 Maastotietokannan torrent-jakelun shapefile-tiedostojen purkaminen zip-arkistoista Windows-komentojonoilla Viimeksi muokattu 5. toukokuuta 2012 Maastotietokannan torrent-jakeluun sisältyy yli 5000 zip-arkistoa,
Maastotietokannan torrent-jakelun shapefile-tiedostojen purkaminen zip-arkistoista Windows-komentojonoilla Viimeksi muokattu 5. toukokuuta 2012 Maastotietokannan torrent-jakeluun sisältyy yli 5000 zip-arkistoa,
Ristitulolle saadaan toinen muistisääntö determinantin avulla. Vektoreiden v ja w ristitulo saadaan laskemalla determinantti
 14 Ristitulo Avaruuden R 3 vektoreille voidaan määritellä pistetulon lisäksi niin kutsuttu ristitulo. Pistetulosta poiketen ristitulon tulos ei ole reaaliluku vaan avaruuden R 3 vektori. Ristitulosta on
14 Ristitulo Avaruuden R 3 vektoreille voidaan määritellä pistetulon lisäksi niin kutsuttu ristitulo. Pistetulosta poiketen ristitulon tulos ei ole reaaliluku vaan avaruuden R 3 vektori. Ristitulosta on
0, niin vektorit eivät ole kohtisuorassa toisiaan vastaan.
 Tekijä Pitkä matematiikka 4 9.1.016 168 a) Lasketaan vektorien a ja b pistetulo. a b = (3i + 5 j) (7i 3 j) = 3 7 + 5 ( 3) = 1 15 = 6 Koska pistetulo a b 0, niin vektorit eivät ole kohtisuorassa toisiaan
Tekijä Pitkä matematiikka 4 9.1.016 168 a) Lasketaan vektorien a ja b pistetulo. a b = (3i + 5 j) (7i 3 j) = 3 7 + 5 ( 3) = 1 15 = 6 Koska pistetulo a b 0, niin vektorit eivät ole kohtisuorassa toisiaan
Hiab 211W Kapasiteetti 21 tm
 Hiab 211W Kapasiteetti 21 tm Tuote-esite Tekee kierrätyksestä helpompaa Nopea ja kompakti Hiabin XS 211W HiPro on erityisesti kevyempiin kierrätystöihin suunniteltu 21 tm kapasiteettiluokan nosturi. XS
Hiab 211W Kapasiteetti 21 tm Tuote-esite Tekee kierrätyksestä helpompaa Nopea ja kompakti Hiabin XS 211W HiPro on erityisesti kevyempiin kierrätystöihin suunniteltu 21 tm kapasiteettiluokan nosturi. XS
Ensimmäinen osa: Rautalankamallinnus. Rautalankamallinnus
 Ensimmäinen osa: Rautalankamallinnus Rautalankamallinnus Tampereen ammattiopisto - CAD -perusharjoitukset Rautalankamallinnus I: Jana, suorakulmio ja ympyrä Harjoitusten yleisohje Valitse suunnittelutilan
Ensimmäinen osa: Rautalankamallinnus Rautalankamallinnus Tampereen ammattiopisto - CAD -perusharjoitukset Rautalankamallinnus I: Jana, suorakulmio ja ympyrä Harjoitusten yleisohje Valitse suunnittelutilan
KÄÄNTÖPUOMINOSTURIT. TEOLLISUUSNOSTURIT Ydinvoimalanosturit. Raskaat haarukkatrukit KÄÄNTÖPUOMINOSTURIT
 TEOLLISUUSNOSTURIT Ydinvoimalanosturit SATAMANOSTURIT Raskaat haarukkatrukit KUNNOSSAPITO TYÖSTÖKONEHUOLTO KÄÄNTÖPUOMINOSTURIT KÄÄNTÖPUOMINOSTURIT 2 Konecranes Kääntöpuominosturit TYÖPISTEEN SELKÄRANKA
TEOLLISUUSNOSTURIT Ydinvoimalanosturit SATAMANOSTURIT Raskaat haarukkatrukit KUNNOSSAPITO TYÖSTÖKONEHUOLTO KÄÄNTÖPUOMINOSTURIT KÄÄNTÖPUOMINOSTURIT 2 Konecranes Kääntöpuominosturit TYÖPISTEEN SELKÄRANKA
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 24.2.2016 Susanna Hurme Päivän aihe: Voiman momentin käsite (Kirjan luvut 4.1-4.6) Mikä on voiman momentti? Määritetään momentti skalaari- ja vektorimuodossa Opitaan
KJR-C1001 Statiikka ja dynamiikka Luento 24.2.2016 Susanna Hurme Päivän aihe: Voiman momentin käsite (Kirjan luvut 4.1-4.6) Mikä on voiman momentti? Määritetään momentti skalaari- ja vektorimuodossa Opitaan
Ohjeita fysiikan ylioppilaskirjoituksiin
 Ohjeita fysiikan ylioppilaskirjoituksiin Kari Eloranta 2016 Jyväskylän Lyseon lukio 11. tammikuuta 2016 Kokeen rakenne Fysiikan kokeessa on 13 tehtävää, joista vastataan kahdeksaan. Tehtävät 12 ja 13 ovat
Ohjeita fysiikan ylioppilaskirjoituksiin Kari Eloranta 2016 Jyväskylän Lyseon lukio 11. tammikuuta 2016 Kokeen rakenne Fysiikan kokeessa on 13 tehtävää, joista vastataan kahdeksaan. Tehtävät 12 ja 13 ovat
4. Käyrän lokaaleja ominaisuuksia
 23 VEKTORIANALYYSI Luento 3 4 Käyrän lokaaleja ominaisuuksia Käyrän tangentti Tarkastellaan parametrisoitua käyrää r( t ) Parametrilla t ei tarvitse olla mitään fysikaalista merkitystä, mutta seuraavassa
23 VEKTORIANALYYSI Luento 3 4 Käyrän lokaaleja ominaisuuksia Käyrän tangentti Tarkastellaan parametrisoitua käyrää r( t ) Parametrilla t ei tarvitse olla mitään fysikaalista merkitystä, mutta seuraavassa
Kokoonpanorobotisointi konepaja- teollisuudessa Assembly robotics in industry
 Lappeenrannan teknillinen yliopisto Teknillinen tiedekunta Konetekniikan koulutusohjelma BK10A0400 Kandidaatintyö Kokoonpanorobotisointi konepaja- teollisuudessa Assembly robotics in industry Työn tarkastaja
Lappeenrannan teknillinen yliopisto Teknillinen tiedekunta Konetekniikan koulutusohjelma BK10A0400 Kandidaatintyö Kokoonpanorobotisointi konepaja- teollisuudessa Assembly robotics in industry Työn tarkastaja
Suorien ja tasojen geometriaa Suorien ja tasojen yhtälöt
 6. Suorien tasojen geometriaa 6.1. Suorien tasojen yhtälöt 55. Osoita, että yhtälöt x = 3 + τ y = 1 3τ esittävät samaa tason suoraa. Yhteinen piste 1,5) suunta i 3j. x = 1 6τ y = 5 + 9τ 56. Määritä suoran
6. Suorien tasojen geometriaa 6.1. Suorien tasojen yhtälöt 55. Osoita, että yhtälöt x = 3 + τ y = 1 3τ esittävät samaa tason suoraa. Yhteinen piste 1,5) suunta i 3j. x = 1 6τ y = 5 + 9τ 56. Määritä suoran
kaikki ( r, θ )-avaruuden pisteet (0, θ ) - oli θ
-avaruuden pisteet (0, θ ) - oli θ") 58 VEKTORIANALYYSI Luento 9 Ortogonaaliset käyräviivaiset koordinaatistot Olemme jo monta kertaa esittäneet karteesiset x, y ja z koordinaatit uusia koordinaatteja käyttäen: x= xuvw (,, ), y= yuvw (,,
58 VEKTORIANALYYSI Luento 9 Ortogonaaliset käyräviivaiset koordinaatistot Olemme jo monta kertaa esittäneet karteesiset x, y ja z koordinaatit uusia koordinaatteja käyttäen: x= xuvw (,, ), y= yuvw (,,