Malleja ja menetelmiä geometriseen tietokonenäköön
|
|
|
- Kirsi-Kaisa Härkönen
- 9 vuotta sitten
- Katselukertoja:
Transkriptio
1 Malleja ja menetelmiä geometriseen tietokonenäköön Juho Kannala

2 Johdanto Tietokonenäkö on ala, joka kehittää menetelmiä automaattiseen kuvien sisällön tulkintaan Tietokonenäkö on ajankohtainen tutkimusalue: Kameroiden ja digitaalisen kuvamateriaalin määrä kasvaa nopeasti (mm. kännykkäkamerat) Tarve kuvien automaattiseen käsittelyyn kasvaa myös (esim. kuvahaut valtavista tietokannoista) Toisaalta uudet tekniikat ja laitteiden laskentakapasiteetin lisääntyminen mahdollistavat myös kokonaan uusia sovelluksia (esim. itsenäiset ympäristöään havainnoivat robotit)
 Toisaalta uudet tekniikat ja laitteiden laskentakapasiteetin lisääntyminen")
3 Geometrinen tietokonenäkö Tietokonenäön osa-alue, joka tutkii kuvanäkymän ja sitä kuvaavien kameroiden geometrisia ominaisuuksia ja niiden välisiä suhteita Monet uudet sovellukset hyödyntävät geometrisen tietokonenäön menetelmiä: Kuvapohjaiset mallinnus- ja visualisointiohjelmistot (esim. Microsoft Photosynth) Katunäkymiä sisältävät Internetin karttapalvelut (Google Street View) Kuvien sisältöä analysoivat tiedonhakupalvelut (Google Goggles) Kolmiulotteiset elokuvat sekä täydennetyn todellisuuden ja virtuaalitodellisuuden sovellukset (Avatar)
 Katunäkymiä sisältävät Internetin karttapalvelut (Google Street View) Kuvien sisältöä analysoivat")
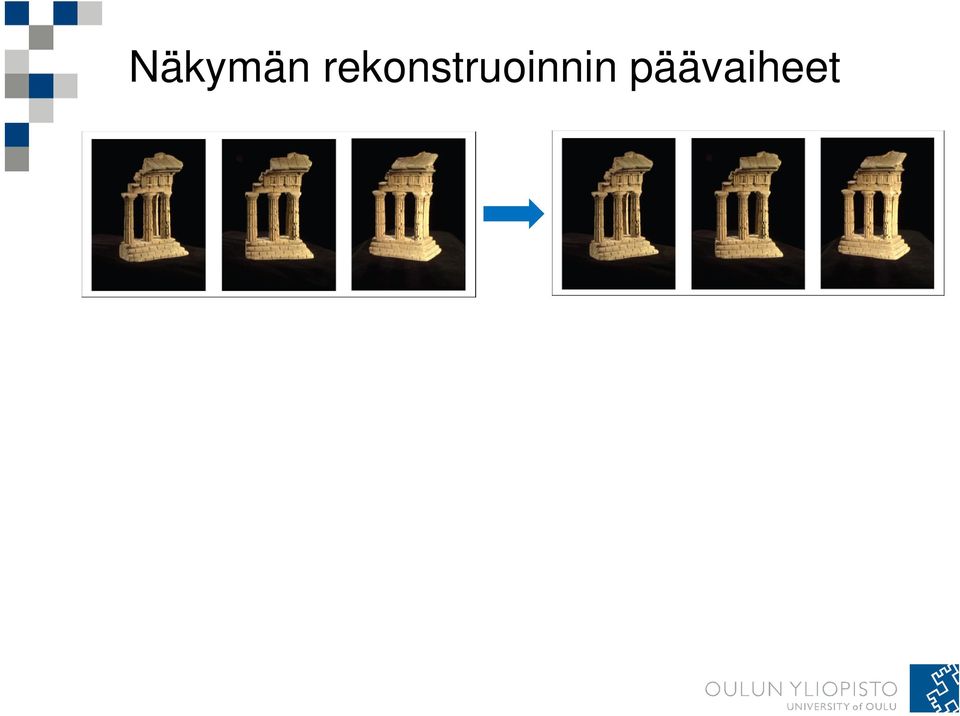
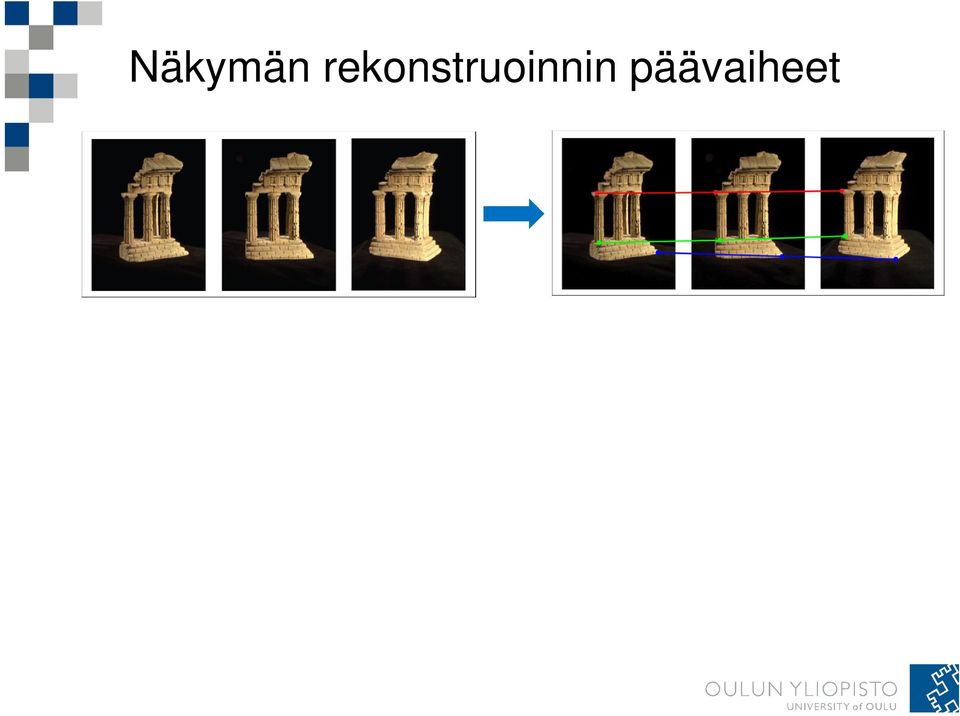
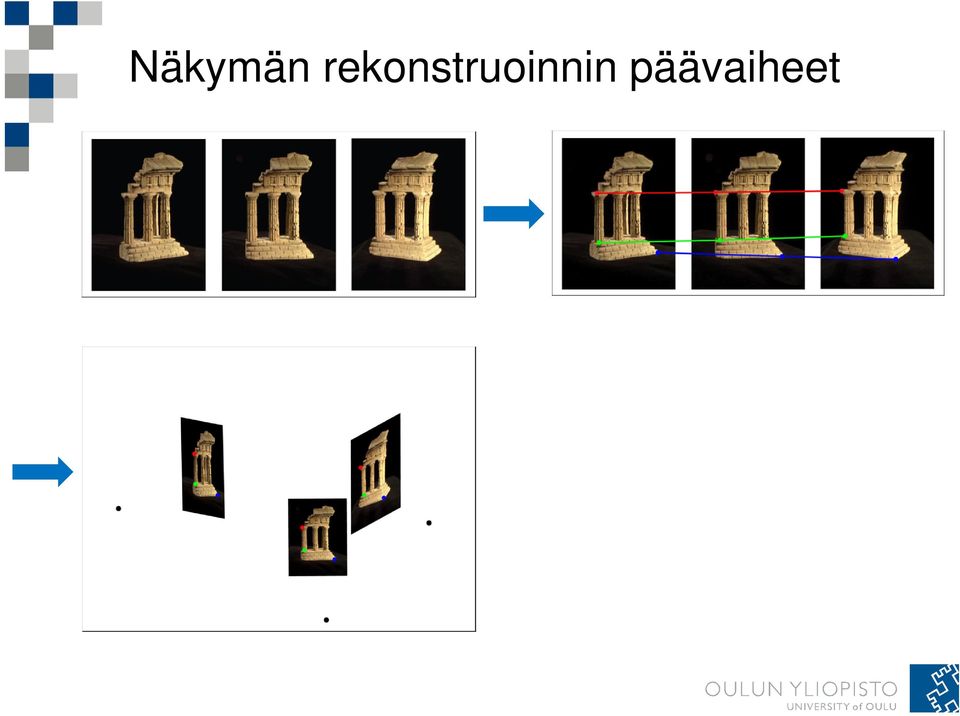
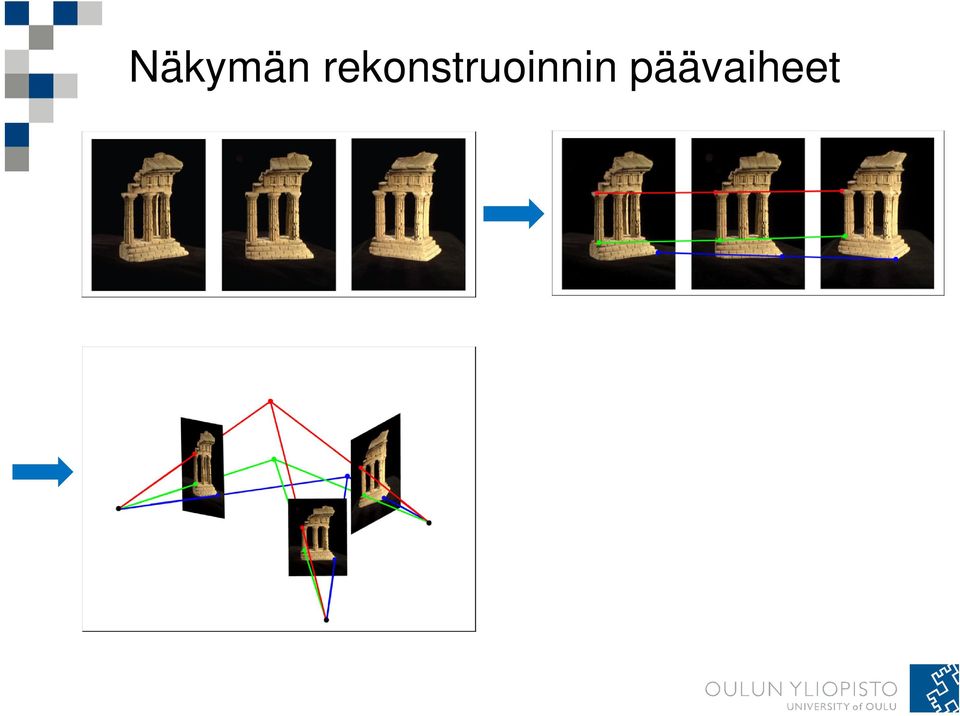
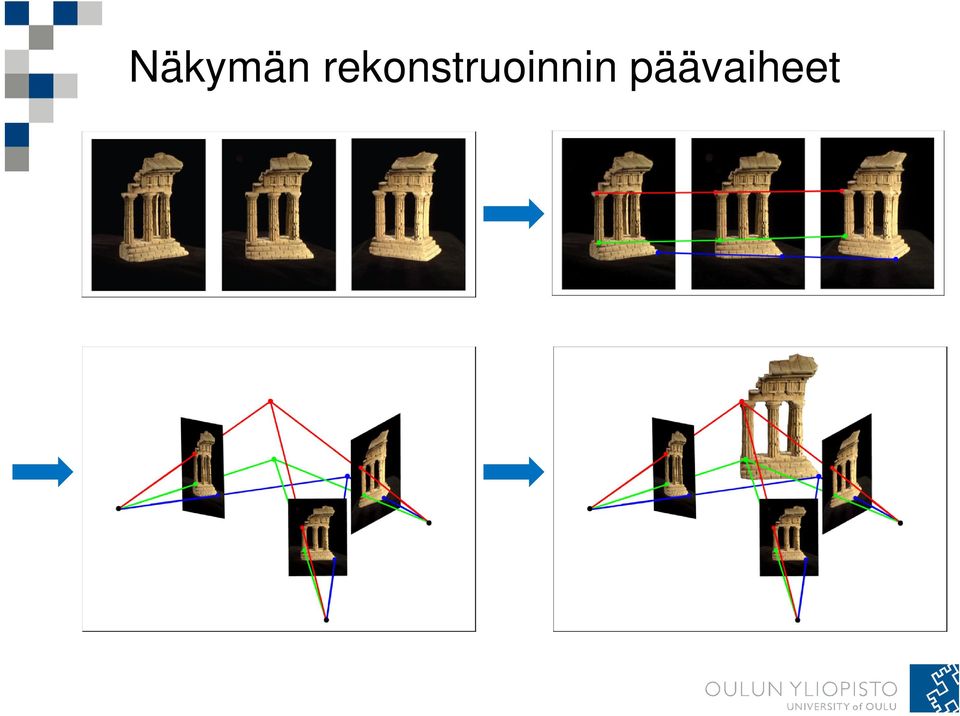
4 Näkymän kolmiulotteinen rekonstruointi monesta kuvasta Keskeinen ongelma geometrisessa tietokonenäössä Sisältää useita osaongelmia: Vastaavien piirteiden paikannus kuvista ja niiden rekonstruointi sekä kameroiden asemien määritys (engl. structure from motion) Kameran geometrinen kalibrointi tai itsekalibrointi Kattavan pintamallin muodostaminen näkymästä (engl. multi-view stereo) Väitöstyössä on tutkittu tähän ongelmakenttään liittyviä asioita
 Kameran geometrinen kalibrointi tai itsekalibrointi Kattavan pintamallin muodostaminen")
5 Näkymän rekonstruoinnin päävaiheet

6 Näkymän rekonstruoinnin päävaiheet
7 Näkymän rekonstruoinnin päävaiheet

8 Näkymän rekonstruoinnin päävaiheet
9 Näkymän rekonstruoinnin päävaiheet
10 Näkymän rekonstruoinnin päävaiheet
11 Näkymän rekonstruoinnin päävaiheet

12 Näkymän rekonstruoinnin päävaiheet
13 Ensimmäinen tutkimusongelma: Tason projektiivisen muunnoksen määrittäminen kartioleikkauksista Kaksi kuvaa tasomaisesta pinnasta eri kuvakulmista Kameroiden asemat voidaan ratkaista määrittämällä projektiivinen muunnos kuvien välille Väitöstyössä tutkittiin menetelmiä muunnoksen määrittämiseen vastaavista kartioleikkauksista (esim. kaksi vastinellipsiä riittää)

14 Ensimmäinen tutkimusongelma: Tason projektiivisen muunnoksen määrittäminen kartioleikkauksista Kaksi kuvaa tasomaisesta pinnasta eri kuvakulmista Kameroiden asemat voidaan ratkaista määrittämällä projektiivinen muunnos kuvien välille Väitöstyössä tutkittiin menetelmiä muunnoksen määrittämiseen vastaavista kartioleikkauksista (esim. kaksi vastinellipsiä riittää)

15 Toinen tutkimusongelma: Geometrinen kameran kalibrointi Kameran geometristen kuvausominaisuuksien määrittäminen

16 Toinen tutkimusongelma: Geometrinen kameran kalibrointi Kameran geometristen kuvausominaisuuksien määrittäminen Tutkimus painottui laajakulmaisiin keskeiskameroihin

17 Toinen tutkimusongelma: Geometrinen kameran kalibrointi Kameran geometristen kuvausominaisuuksien määrittäminen Tutkimus painottui laajakulmaisiin keskeiskameroihin

18 Toinen tutkimusongelma: Geometrinen kameran kalibrointi Kameran geometristen kuvausominaisuuksien määrittäminen Tutkimus painottui laajakulmaisiin keskeiskameroihin

19 Toinen tutkimusongelma: Geometrinen kameran kalibrointi Kameran geometristen kuvausominaisuuksien määrittäminen Tutkimus painottui laajakulmaisiin keskeiskameroihin

20 Toinen tutkimusongelma: Geometrinen kameran kalibrointi Kameran geometristen kuvausominaisuuksien määrittäminen Tutkimus painottui laajakulmaisiin keskeiskameroihin Keskeiskamerassa kaikki näkymästä kuvatasolle tulevat valonsäteet leikkaavat yhdessä pisteessä

21 Toinen tutkimusongelma: Geometrinen kameran kalibrointi Kameran geometristen kuvausominaisuuksien määrittäminen Tutkimus painottui laajakulmaisiin keskeiskameroihin Keskeiskamerassa kaikki näkymästä kuvatasolle tulevat valonsäteet leikkaavat yhdessä pisteessä Työssä kehitettiin yleiskäyttöinen matemaattinen malli keskeiskameroille ja menetelmä mallin parametrien määrittämiseksi
22 Kameramallin parametrien määritys Yhden projektiokeskuksen malli soveltuu monille hyvinkin erilaisille kameroille Kameramallin parametrit voidaan määrittää käyttäen useita kuvia tunnetusta tasomaisesta kuviosta Työssä kalibroitiin viisi erilaista kameraa käyttäen kalibrointikuviota, joka koostuu valkoisista ympyröistä mustalla taustalla Tavallinen linssi (perspektiiviprojektio) Laajakulmalinssi Kalansilmälinssi Katadioptrinen kamera (hyperbolinen peili) Katadioptrinen kamera (tasakulmainen peili)
23 Kolmas tutkimusongelma: Viemäriputken mallinnus videokuvasta Tavoitteena on muodostaa kolmiulotteinen malli viemäriputkesta automaattisesti putkessa liikkuvan kameran kuvaaman videon pohjalta
24 Esimerkki
25 Neljäs tutkimusongelma: Vastinpisteiden määrittäminen tiheästi Tehtävänä on määrittää paljon vastinpisteitä kahden samasta näkymästä otetun kuvan välille Kehitetty menetelmä perustuu harvasti paikannettujen vastinalueiden vaiheittaiseen kasvattamiseen Menetelmä sietää suurempia kuvakulman muutoksia kuin aiemmat kasvatusmenetelmät
26 Pintakuvion perusteella mukautuva vastinpisteiden kasvatus Vastinpisteiden kasvatus pysähtyy, kun paikallinen geometrinen muunnos kuvien välillä muuttuu
27 Pintakuvion perusteella mukautuva vastinpisteiden kasvatus Vastinpisteiden kasvatus pysähtyy, kun paikallinen geometrinen muunnos kuvien välillä muuttuu Pintakuvioon mukautuva kasvatus parantaa tulosta, kun näkymä ei ole jäykkä ja tasomainen
28 Sovellus: Kohteiden tunnistus Tehtävänä on tunnistaa, että esiintyykö tunnetun mallikuvajoukon kohteita annetussa kyselykuvassa Menetelmä pohjautuu vastinpisteiden määrittämiseen kyselykuvan ja mallikuvien välille Yhdenmukaisesti liikkuvat vastinpisteet ryhmitellään yhteen ja pisteiden määrä toimii tunnistuskriteerinä Samalla kohde saadaan rajattua kyselykuvasta
29 Sovellus: Kohteiden erottelu Tehtävänä löytää kahdesta kuvasta yhteiset kohteet Kumpikin kuva voi sisältää useita kohteita
30 Sovellus: Kohteiden erottelu Tehtävänä löytää kahdesta kuvasta yhteiset kohteet Kumpikin kuva voi sisältää useita kohteita Menetelmä pohjautuu vastinpisteiden ryhmittelyyn Vastinpisteryhmät tuottavat alkuarvauksen kohteista, joiden rajat ja liike sitten tarkennetaan Toimii myös, kun kohteet eivät ole jäykkiä tai tasomaisia
31 Yhteenveto Väitöstyössä tutkittiin useita geometrisen tietokonenäön ongelmia Tutkimusaiheet sivuavat kahta keskeistä tietokonenäön osa-aluetta: Näkymän kolmiulotteinen mallinnus useasta kuvasta Kohteiden automaattinen tunnistus valokuvista Tärkeimmät tulokset: Yleinen matemaattinen kameramalli keskeiskameroille ja kalibrointimenetelmä mallin parametrien määrittämiseksi Menetelmä vastinpisteiden määrittämiseen kahden kuvan välille tiheästi
Sikiön geenit altistavat ennenaikaiselle synnytykselle
 Sikiön geenit altistavat ennenaikaiselle synnytykselle Väitöstutkimuksessa havaittiin, että sikiön geenit altistavat ennenaikaiselle synnytykselle, mikä on kokonaan uudenlainen ajatus. Yritykset ennaltaehkäistä
Sikiön geenit altistavat ennenaikaiselle synnytykselle Väitöstutkimuksessa havaittiin, että sikiön geenit altistavat ennenaikaiselle synnytykselle, mikä on kokonaan uudenlainen ajatus. Yritykset ennaltaehkäistä
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
TIETOTEKNIIKAN OSASTO. Marko Seppälä YMPÄRISTÖN 3D-MALLINTAMINEN QUADROKOPTERILLA KUVATUN 2D-VIDEON POHJALTA
 TIETOTEKNIIKAN OSASTO Marko Seppälä YMPÄRISTÖN 3D-MALLINTAMINEN QUADROKOPTERILLA KUVATUN 2D-VIDEON POHJALTA Diplomityö Tietotekniikan koulutusohjelma Tammikuu 2014 Seppälä M. (2013) Ympäristön 3D-mallintaminen
TIETOTEKNIIKAN OSASTO Marko Seppälä YMPÄRISTÖN 3D-MALLINTAMINEN QUADROKOPTERILLA KUVATUN 2D-VIDEON POHJALTA Diplomityö Tietotekniikan koulutusohjelma Tammikuu 2014 Seppälä M. (2013) Ympäristön 3D-mallintaminen
Lataa Geometristen kuvien värittäminen - Sympsionics Design. Lataa
 Lataa Geometristen kuvien värittäminen - Sympsionics Design Lataa Kirjailija: Sympsionics Design ISBN: 9789526787824 Sivumäärä: 59 Formaatti: PDF Tiedoston koko: 29.30 Mb Kirja sisältää runsaasti ohjeita
Lataa Geometristen kuvien värittäminen - Sympsionics Design Lataa Kirjailija: Sympsionics Design ISBN: 9789526787824 Sivumäärä: 59 Formaatti: PDF Tiedoston koko: 29.30 Mb Kirja sisältää runsaasti ohjeita
Fotogrammetrian termistöä
 Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Puun geometrisen laatutiedon mittaukset monikameramenetelmällä
 Metsätehon raportti 183 11.3.2005 Rajoitettu jakelu Järvi-Suomen Uittoyhdistys Kuhmo Oy Metsähallitus Metsäliitto Osuuskunta Metsäteollisuus ry Pölkky Oy Stora Enso Oyj UPM-Kymmene Oyj Vapo Timber Oy Visuvesi
Metsätehon raportti 183 11.3.2005 Rajoitettu jakelu Järvi-Suomen Uittoyhdistys Kuhmo Oy Metsähallitus Metsäliitto Osuuskunta Metsäteollisuus ry Pölkky Oy Stora Enso Oyj UPM-Kymmene Oyj Vapo Timber Oy Visuvesi
Teoreettisia perusteita II
 Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää
 Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
Luento 7: Kuvan ulkoinen orientointi
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
Luento 2 Stereokuvan laskeminen. 2008 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 7: Fotogrammetrinen mittausprosessi
 7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
Osa IX. Z muunnos. Johdanto Diskreetit funktiot
 Osa IX Z muunnos A.Rasila, J.v.Pfaler () Mat-.33 Matematiikan peruskurssi KP3-i 9. lokakuuta 2007 298 / 322 A.Rasila, J.v.Pfaler () Mat-.33 Matematiikan peruskurssi KP3-i 9. lokakuuta 2007 299 / 322 Johdanto
Osa IX Z muunnos A.Rasila, J.v.Pfaler () Mat-.33 Matematiikan peruskurssi KP3-i 9. lokakuuta 2007 298 / 322 A.Rasila, J.v.Pfaler () Mat-.33 Matematiikan peruskurssi KP3-i 9. lokakuuta 2007 299 / 322 Johdanto
PLAY. TP1 Mobiili musiikkikasvatusteknologia MEDIAT Kuvan ja äänen tallentaminen, muokkaaminen ja jakaminen (v1.1)
") PLAY TP1 Mobiili musiikkikasvatusteknologia MEDIAT Kuvan ja äänen tallentaminen, muokkaaminen ja jakaminen 4.2.2016 (v1.1), projektipäällikkö Sisältö Kuvan ja äänen tallentaminen, muokkaaminen ja jakaminen
PLAY TP1 Mobiili musiikkikasvatusteknologia MEDIAT Kuvan ja äänen tallentaminen, muokkaaminen ja jakaminen 4.2.2016 (v1.1), projektipäällikkö Sisältö Kuvan ja äänen tallentaminen, muokkaaminen ja jakaminen
TEKA-valvontakamerat. koti- ja mökkikäyttöön sekä pienyritysten valvontatarpeisiin. tools not toys. visisystems.fi
 TEKA-valvontakamerat koti- ja mökkikäyttöön sekä pienyritysten valvontatarpeisiin 4/8/16 kanavaiset, kehittyneet videotallentimet HDMI ulostulolla. 4/8 x 600 TVL korkearesoluutioiset kamerat Helppo nettikäyttö
TEKA-valvontakamerat koti- ja mökkikäyttöön sekä pienyritysten valvontatarpeisiin 4/8/16 kanavaiset, kehittyneet videotallentimet HDMI ulostulolla. 4/8 x 600 TVL korkearesoluutioiset kamerat Helppo nettikäyttö
5. Grafiikkaliukuhihna: (1) geometriset operaatiot
 geometriset operaatiot") 5. Grafiikkaliukuhihna: () geometriset operaatiot Johdanto Grafiikkaliukuhihnan tarkoitus on kuvata kolmiulotteisen kohdeavaruuden kuva kaksiulotteiseen kuva eli nättöavaruuteen. aikka kolmiulotteisiakin
5. Grafiikkaliukuhihna: () geometriset operaatiot Johdanto Grafiikkaliukuhihnan tarkoitus on kuvata kolmiulotteisen kohdeavaruuden kuva kaksiulotteiseen kuva eli nättöavaruuteen. aikka kolmiulotteisiakin
Suora 1/5 Sisältö ESITIEDOT: vektori, koordinaatistot, piste
 Suora 1/5 Sisältö KATSO MYÖS:, vektorialgebra, geometriset probleemat, taso Suora geometrisena peruskäsitteenä Pisteen ohella suora on geometrinen peruskäsite, jota varsinaisesti ei määritellä. Alkeisgeometriassa
Suora 1/5 Sisältö KATSO MYÖS:, vektorialgebra, geometriset probleemat, taso Suora geometrisena peruskäsitteenä Pisteen ohella suora on geometrinen peruskäsite, jota varsinaisesti ei määritellä. Alkeisgeometriassa
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 4 Jatkuvuus Jatkuvan funktion määritelmä Tarkastellaan funktiota f x) jossakin tietyssä pisteessä x 0. Tämä funktio on tässä pisteessä joko jatkuva tai epäjatkuva. Jatkuvuuden
Matematiikan tukikurssi Kurssikerta 4 Jatkuvuus Jatkuvan funktion määritelmä Tarkastellaan funktiota f x) jossakin tietyssä pisteessä x 0. Tämä funktio on tässä pisteessä joko jatkuva tai epäjatkuva. Jatkuvuuden
Luento 10: Optinen 3-D mittaus ja laserkeilaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Selaimen kautta käytettävällä PaikkaOpin kartta-alustalla PaikkaOppi Mobiililla
 19.1.2017 Sisällys Slide 3. Mikä on PaikkaOppi Mobiili? Slide 4. Kaavio PaikkaOppi Mobiilin käytön aloituksesta. Slidet 5-7. Tunnusten ja kurssin luominen ennen sovelluksen käyttöä. Slide 8. Hae sovellus
19.1.2017 Sisällys Slide 3. Mikä on PaikkaOppi Mobiili? Slide 4. Kaavio PaikkaOppi Mobiilin käytön aloituksesta. Slidet 5-7. Tunnusten ja kurssin luominen ennen sovelluksen käyttöä. Slide 8. Hae sovellus
S11-04 Kompaktikamerat stereokamerajärjestelmässä. Projektisuunnitelma
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Projektisuunnitelma Ari-Matti Reinsalo Anssi Niemi 28.1.2011 Projektityön tavoite Projektityössä
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Projektisuunnitelma Ari-Matti Reinsalo Anssi Niemi 28.1.2011 Projektityön tavoite Projektityössä
T-111.4310 Vuorovaikutteinen tietokonegrafiikka Tentti 14.12.2011
 T-111.4310 Vuorovaikutteinen tietokonegrafiikka Tentti 14.12.2011 Vastaa kolmeen tehtävistä 1-4 ja tehtävään 5. 1. Selitä lyhyesti mitä seuraavat termit tarkoittavat tai minkä ongelman algoritmi ratkaisee
T-111.4310 Vuorovaikutteinen tietokonegrafiikka Tentti 14.12.2011 Vastaa kolmeen tehtävistä 1-4 ja tehtävään 5. 1. Selitä lyhyesti mitä seuraavat termit tarkoittavat tai minkä ongelman algoritmi ratkaisee
E. Oja ja H. Mannila Datasta Tietoon: Luku 2
 2. DATASTA TIETOON: MITÄ DATAA; MITÄ TIETOA? 2.1. Data-analyysin ongelma Tulevien vuosien valtava haaste on digitaalisessa muodossa talletetun datan kasvava määrä Arvioita: Yhdysvaltojen kongressin kirjasto
2. DATASTA TIETOON: MITÄ DATAA; MITÄ TIETOA? 2.1. Data-analyysin ongelma Tulevien vuosien valtava haaste on digitaalisessa muodossa talletetun datan kasvava määrä Arvioita: Yhdysvaltojen kongressin kirjasto
Sastamala Äetsänmäen vesihuoltolinjan muinaisjäännösinventointi 2010
 1 Sastamala Äetsänmäen vesihuoltolinjan muinaisjäännösinventointi 2010 Timo Jussila Kustantaja: Sastamalan kaupunki, Sastamalan Vesi Liikelaitos 2 Sisältö: Perustiedot... 2 Inventointi... 3 Kartat... 4
1 Sastamala Äetsänmäen vesihuoltolinjan muinaisjäännösinventointi 2010 Timo Jussila Kustantaja: Sastamalan kaupunki, Sastamalan Vesi Liikelaitos 2 Sisältö: Perustiedot... 2 Inventointi... 3 Kartat... 4
T Tietotekniikan peruskurssi: Tietokonegrafiikka. Tassu Takala TKK, Tietoliikenneohjelmistojen ja multimedian laboratorio
 T-106.1041 Tietotekniikan peruskurssi: Tassu Takala TKK, Tietoliikenneohjelmistojen ja multimedian laboratorio Luennon aiheita (1) mitä on tietokonegrafiikka? tietokone piirtää kuvia mikä on digitaalinen
T-106.1041 Tietotekniikan peruskurssi: Tassu Takala TKK, Tietoliikenneohjelmistojen ja multimedian laboratorio Luennon aiheita (1) mitä on tietokonegrafiikka? tietokone piirtää kuvia mikä on digitaalinen
Miten otan ja poistan valokuvia?
 Miten otan ja poistan valokuvia? Miten otan valokuvia? 1. Takakamera 2. Etukamera selfie 3. Näyttökuva Mihin kuvat tallentuvat? Miten poistan kuvia? + Kuvausharjoituksia ja vinkkejä valokuvaamiseen Miten
Miten otan ja poistan valokuvia? Miten otan valokuvia? 1. Takakamera 2. Etukamera selfie 3. Näyttökuva Mihin kuvat tallentuvat? Miten poistan kuvia? + Kuvausharjoituksia ja vinkkejä valokuvaamiseen Miten
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
Kun yritän luoda täydellisen kuvan, käytän aina tarkoin määriteltyjä
 Täydellisen kuvan niksit Kun yritän luoda täydellisen kuvan, käytän aina tarkoin määriteltyjä suuntaviivoja. Kutsun niitä 9 elementiksi. Tässä artikkelissa käyn läpi mitä tarvitsen ja mitä otan huomioon
Täydellisen kuvan niksit Kun yritän luoda täydellisen kuvan, käytän aina tarkoin määriteltyjä suuntaviivoja. Kutsun niitä 9 elementiksi. Tässä artikkelissa käyn läpi mitä tarvitsen ja mitä otan huomioon
Dynaamiset valokuvat osaksi AV-esitystä. Kameraseura ry AV-ilta 16.1.2013. Esittelijänä Jan Fröjdman
 Dynaamiset valokuvat osaksi AV-esitystä Kameraseura ry AV-ilta 16.1.2013 Esittelijänä AV-illan kutsu oli seuraavanlainen : Dynamiikan lisääminen valokuviin tuo AV-esitykselle uutta ulottuvuutta. Käsittelemme
Dynaamiset valokuvat osaksi AV-esitystä Kameraseura ry AV-ilta 16.1.2013 Esittelijänä AV-illan kutsu oli seuraavanlainen : Dynamiikan lisääminen valokuviin tuo AV-esitykselle uutta ulottuvuutta. Käsittelemme
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry)
") Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
Jani Heikkilä, Myyntijohtaja, Bitcomp Oy. Kantoon -sovellus ja muut metsänomistajan palvelut
 Jani Heikkilä, Myyntijohtaja, Bitcomp Oy Kantoon -sovellus ja muut metsänomistajan palvelut Missio: Tietojärjestelmämme tuottavat asiakkaillemme aitoa arvoa ja rahassa mitattavia hyötyjä. Bitcomp Oy osaamista
Jani Heikkilä, Myyntijohtaja, Bitcomp Oy Kantoon -sovellus ja muut metsänomistajan palvelut Missio: Tietojärjestelmämme tuottavat asiakkaillemme aitoa arvoa ja rahassa mitattavia hyötyjä. Bitcomp Oy osaamista
Luento 2: Kuvakoordinaattien mittaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 14.9.2005) Luento 2: Kuvakoordinaattien mittaus Mitä pitäisi oppia? Muunnokset informaatiokanavassa (osin kertausta) Erotella kuvaan ja
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 14.9.2005) Luento 2: Kuvakoordinaattien mittaus Mitä pitäisi oppia? Muunnokset informaatiokanavassa (osin kertausta) Erotella kuvaan ja
Taso 1/5 Sisältö ESITIEDOT: vektori, koordinaatistot, piste, suora
 Taso 1/5 Sisältö Taso geometrisena peruskäsitteenä Kolmiulotteisen alkeisgeometrian peruskäsitteisiin kuuluu taso pisteen ja suoran lisäksi. Intuitiivisesti sitä voidaan ajatella joka suunnassa äärettömyyteen
Taso 1/5 Sisältö Taso geometrisena peruskäsitteenä Kolmiulotteisen alkeisgeometrian peruskäsitteisiin kuuluu taso pisteen ja suoran lisäksi. Intuitiivisesti sitä voidaan ajatella joka suunnassa äärettömyyteen
Tiedonhallinnan perusteet. Viikko 1 Jukka Lähetkangas
 Tiedonhallinnan perusteet Viikko 1 Jukka Lähetkangas Kurssilla käytävät asiat Tietokantojen toimintafilosofian ja -tekniikan perusteet Tiedonsäilönnän vaihtoehdot Tietokantojen suunnitteleminen internetiä
Tiedonhallinnan perusteet Viikko 1 Jukka Lähetkangas Kurssilla käytävät asiat Tietokantojen toimintafilosofian ja -tekniikan perusteet Tiedonsäilönnän vaihtoehdot Tietokantojen suunnitteleminen internetiä
Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta
 Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta Sanna Kaasalainen Kaukokartoituksen ja Fotogrammetrian Osasto Ilmastonmuutos ja ääriarvot 13.9.2012 Ympäristön Aktiivinen
Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta Sanna Kaasalainen Kaukokartoituksen ja Fotogrammetrian Osasto Ilmastonmuutos ja ääriarvot 13.9.2012 Ympäristön Aktiivinen
Luento 4: Kuvien geometrinen tulkinta
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kuvien geometrinen tulkinta AIHEITA Muunnokset informaatiokanavassa Geometrisen tulkinnan vaihtoehdot Mittakaava
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kuvien geometrinen tulkinta AIHEITA Muunnokset informaatiokanavassa Geometrisen tulkinnan vaihtoehdot Mittakaava
Tiedonkeruun miljoonat pisteet
 Tiedonkeruun miljoonat pisteet Arttu Julin, Rakennetun ympäristön mittauksen ja mallinnuksen instituutti, Aalto-yliopisto. arttu.julin@aalto.fi Kaupunkimallit 2017 seminaari 8.11.2017 Rakennetun ympäristön
Tiedonkeruun miljoonat pisteet Arttu Julin, Rakennetun ympäristön mittauksen ja mallinnuksen instituutti, Aalto-yliopisto. arttu.julin@aalto.fi Kaupunkimallit 2017 seminaari 8.11.2017 Rakennetun ympäristön
Yhteysopas (DSLR-kameroille) Fi
 Fi") SB7J01(1C)/ 6MB4121C-01 Yhteysopas (DSLR-kameroille) Fi Sisällysluettelo Johdanto...2 Liitäntä...2 Ongelmia yhdistämisessä?...2 Lisää SnapBridge-sovelluksesta...2 Tarvittavat välineet...3 Mitä SnapBridge
SB7J01(1C)/ 6MB4121C-01 Yhteysopas (DSLR-kameroille) Fi Sisällysluettelo Johdanto...2 Liitäntä...2 Ongelmia yhdistämisessä?...2 Lisää SnapBridge-sovelluksesta...2 Tarvittavat välineet...3 Mitä SnapBridge
Lisätyn todellisuuden ratkaisuja sisustus- ja rakennussuunnitteluun. Prof. Charles Woodward VTT Digitaaaliset tietojärjestelmät
 Lisätyn todellisuuden ratkaisuja sisustus- ja rakennussuunnitteluun Prof. Charles Woodward VTT Digitaaaliset tietojärjestelmät SISÄLTÖ Lisätty todellisuus - Johdanto Sovelluksia sisustussuunnittelussa
Lisätyn todellisuuden ratkaisuja sisustus- ja rakennussuunnitteluun Prof. Charles Woodward VTT Digitaaaliset tietojärjestelmät SISÄLTÖ Lisätty todellisuus - Johdanto Sovelluksia sisustussuunnittelussa
Live-View-kauko-ohjain
 Live-View-kauko-ohjain RM-LVR1 Tämä käsikirja täydentää yksikön käyttöohjeita. Käsikirjassa esitellään eräitä lisättyjä tai muutettuja toimintoja sekä kuvataan niiden toimintaa. Lue myös yksikön käyttöohjeet.
Live-View-kauko-ohjain RM-LVR1 Tämä käsikirja täydentää yksikön käyttöohjeita. Käsikirjassa esitellään eräitä lisättyjä tai muutettuja toimintoja sekä kuvataan niiden toimintaa. Lue myös yksikön käyttöohjeet.
Järjestelmäarkkitehtuuri (TK081702) Avoimet web-rajapinnat
 Avoimet web-rajapinnat") Järjestelmäarkkitehtuuri (TK081702) SOA yleistyvät verkkopalveluissa Youtube Google... Avaavat pääsyn verkkopalvelun sisältöön. Rajapintojen tarjoamia tietolähteitä yhdistelemällä luodaan uusia palveluja,
Järjestelmäarkkitehtuuri (TK081702) SOA yleistyvät verkkopalveluissa Youtube Google... Avaavat pääsyn verkkopalvelun sisältöön. Rajapintojen tarjoamia tietolähteitä yhdistelemällä luodaan uusia palveluja,
Tulevaisuuden teräsrakenteet ja vaativa valmistus. 3D-skannaus ja käänteinen suunnittelu
 Tulevaisuuden teräsrakenteet ja vaativa valmistus Hämeenlinnassa 24. - 25.1.2018 3D-skannaus ja käänteinen suunnittelu Timo Kärppä, HAMK Ohutlevykeskus 2018 2 SISÄLTÖ 1. Digitaalisuus mahdollistaa monia
Tulevaisuuden teräsrakenteet ja vaativa valmistus Hämeenlinnassa 24. - 25.1.2018 3D-skannaus ja käänteinen suunnittelu Timo Kärppä, HAMK Ohutlevykeskus 2018 2 SISÄLTÖ 1. Digitaalisuus mahdollistaa monia
Tulevaisuuden kameravalvontaa SUBITO (Surveillance of Unattended Baggage including Identification and Tracking of the Owner)
") Tulevaisuuden kameravalvontaa SUBITO (Surveillance of Unattended Baggage including Identification and Tracking of the Owner) Turvallisuusmessut 8.9.2010, Tampere Erikoistutkija Jukka Laitinen, VTT 8.9.2010
Tulevaisuuden kameravalvontaa SUBITO (Surveillance of Unattended Baggage including Identification and Tracking of the Owner) Turvallisuusmessut 8.9.2010, Tampere Erikoistutkija Jukka Laitinen, VTT 8.9.2010
Säteilymittaustietojen hallinta turvajärjestelyissä
 Säteilymittaustietojen hallinta turvajärjestelyissä Säteilyturvakeskus Turvateknologia Tarja Ilander tarja.ilander@stuk.fi 4.11.2009 3-4.11.2009 Organisaatio Luvut kuvaavat henkilöstön määrää vuoden 2008
Säteilymittaustietojen hallinta turvajärjestelyissä Säteilyturvakeskus Turvateknologia Tarja Ilander tarja.ilander@stuk.fi 4.11.2009 3-4.11.2009 Organisaatio Luvut kuvaavat henkilöstön määrää vuoden 2008
Jos sinulla on kysyttävää 10. Vastaanotin toimi.
 Tärkeät turvallisuustiedot ennen käyttöönottoa 1 Onnea uuden Langattoman Baby Guardin johdosta. Ennen kuin otat langattoman Baby Guardin käyttöösi, lue kaikki turvallisuus- ja käyttööhjeet huolellisesti,
Tärkeät turvallisuustiedot ennen käyttöönottoa 1 Onnea uuden Langattoman Baby Guardin johdosta. Ennen kuin otat langattoman Baby Guardin käyttöösi, lue kaikki turvallisuus- ja käyttööhjeet huolellisesti,
Löydä Helsinki Tietoa kaupungin palveluista lukutaidottomille helsinkiläisille
 loydahelsinki.fi Löydä Helsinki Tietoa kaupungin palveluista lukutaidottomille helsinkiläisille Uusi mobiili-infopalvelu Löydä Helsinki kertoo kaupunkilaisille heidän oikeuksistaan ja julkisista palveluista
loydahelsinki.fi Löydä Helsinki Tietoa kaupungin palveluista lukutaidottomille helsinkiläisille Uusi mobiili-infopalvelu Löydä Helsinki kertoo kaupunkilaisille heidän oikeuksistaan ja julkisista palveluista
Liikkuva-sovellusprojekti
 Liikkuva-sovellusprojekti Joel Kivelä Erkki Koskenkorva Mika Lehtinen Oskari Leppäaho Petri Partanen Vaatimusmäärittely Julkinen Versio 010 1322014 Jyväskylän yliopisto Tietotekniikan laitos Jyväskylä
Liikkuva-sovellusprojekti Joel Kivelä Erkki Koskenkorva Mika Lehtinen Oskari Leppäaho Petri Partanen Vaatimusmäärittely Julkinen Versio 010 1322014 Jyväskylän yliopisto Tietotekniikan laitos Jyväskylä
Riemannin pintojen visualisoinnista
 Riemannin pintojen visualisoinnista eli Funktioiden R R kuvaajat Simo K. Kivelä 7.7.6 Tarkastelun kohteena olkoon kompleksimuuttujan kompleksiarvoinen funktio f : C C, f(z) = w eli f(x + iy) = u(x, y)
Riemannin pintojen visualisoinnista eli Funktioiden R R kuvaajat Simo K. Kivelä 7.7.6 Tarkastelun kohteena olkoon kompleksimuuttujan kompleksiarvoinen funktio f : C C, f(z) = w eli f(x + iy) = u(x, y)
Korkeusmallien vertailua ja käyttö nitraattiasetuksen soveltamisessa
 Korkeusmallien vertailua ja käyttö nitraattiasetuksen soveltamisessa Valtakunnallisesti kattavaa laserkeilausaineistoa ei vielä ole. Kaltevuusmallit perustuvat tällä hetkellä digitaalisen korkeusmallin
Korkeusmallien vertailua ja käyttö nitraattiasetuksen soveltamisessa Valtakunnallisesti kattavaa laserkeilausaineistoa ei vielä ole. Kaltevuusmallit perustuvat tällä hetkellä digitaalisen korkeusmallin
Laserkeilauksen ja kuvauksen tilaaminen
 www.terrasolid.com Laserkeilauksen ja kuvauksen tilaaminen Arttu Soininen 22.08.2017 Käsiteltävät aiheet Tarjouspyynnössä määrättävät asiat Laserkeilaustyön jakaminen osiin Ajankohdan vaikutus laserkeilaukseen
www.terrasolid.com Laserkeilauksen ja kuvauksen tilaaminen Arttu Soininen 22.08.2017 Käsiteltävät aiheet Tarjouspyynnössä määrättävät asiat Laserkeilaustyön jakaminen osiin Ajankohdan vaikutus laserkeilaukseen
Luento 6: 3-D koordinaatit
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Windows Movie Maker. Digitaaliset porfoliot oppimisen tukena Taitotyöpajat 7.12.2010. Videonkäsittely. Miisa Brännfors
 Windows Movie Maker Digitaaliset porfoliot oppimisen tukena Taitotyöpajat 7.12.2010 Videonkäsittely Miisa Brännfors MovieMaker:llä voit: Tuoda ohjelmaan videokuvaa ja valokuvia Muokata videokuvaa Listätä
Windows Movie Maker Digitaaliset porfoliot oppimisen tukena Taitotyöpajat 7.12.2010 Videonkäsittely Miisa Brännfors MovieMaker:llä voit: Tuoda ohjelmaan videokuvaa ja valokuvia Muokata videokuvaa Listätä
Ryhmät & uudet mahdollisuudet
 www.terrasolid.com Ryhmät & uudet mahdollisuudet Arttu Soininen 22.08.2017 Uudet mahdollisuudet ryhmien avulla Parempi maanpinnan yläpuolisten kohteiden luokittelu Maanpäällisten kohteiden luokittelu toimii
www.terrasolid.com Ryhmät & uudet mahdollisuudet Arttu Soininen 22.08.2017 Uudet mahdollisuudet ryhmien avulla Parempi maanpinnan yläpuolisten kohteiden luokittelu Maanpäällisten kohteiden luokittelu toimii
VALITA FLUKEN LÄMPÖKAMERA
 VALITA FLUKEN LÄMPÖKAMERA Erinomainen kuvanlaatu Fluke-kameran huippuluokan erottelukyky takaa terävät ja yksityiskohtaiset kuvat ja aiempaa tarkemmat mittaustulokset myös kaukaa tehtävissä mittauksissa.
VALITA FLUKEN LÄMPÖKAMERA Erinomainen kuvanlaatu Fluke-kameran huippuluokan erottelukyky takaa terävät ja yksityiskohtaiset kuvat ja aiempaa tarkemmat mittaustulokset myös kaukaa tehtävissä mittauksissa.
Sanna Pensonen, suunnittelija. Saamelaisalueen koulutuskeskus Virtuaalikoulu www.sogsakk.fi/virtuaalikoulu
 Sanna Pensonen, suunnittelija Tablettien hyödyntäminen opetuksessa Tablettien hyödyntäminen opetuksessa Tablettitietokoneiden käyttö koulussa vahvistaa lasten ongelmanratkaisutaitoja (Yle uutiset 6.8.14)
Sanna Pensonen, suunnittelija Tablettien hyödyntäminen opetuksessa Tablettien hyödyntäminen opetuksessa Tablettitietokoneiden käyttö koulussa vahvistaa lasten ongelmanratkaisutaitoja (Yle uutiset 6.8.14)
Langattoman kotiverkon mahdollisuudet
 Langattoman kotiverkon mahdollisuudet Tietoisku 5.4.2016 mikko.kaariainen@opisto.hel.fi Lataa tietoiskun materiaali netistä, kirjoita osoite selaimen osoitelokeroon: opi.opisto.hel.fi/mikko Tietoverkot
Langattoman kotiverkon mahdollisuudet Tietoisku 5.4.2016 mikko.kaariainen@opisto.hel.fi Lataa tietoiskun materiaali netistä, kirjoita osoite selaimen osoitelokeroon: opi.opisto.hel.fi/mikko Tietoverkot
Mirva Jääskeläinen Espoon kaupungin työväenopisto
 Mirva Jääskeläinen Espoon kaupungin työväenopisto Windows Phonet yleisesti Nokian Lumiat Vanhemmat WindowsPhone 7 Uudemmat WindowsPhone 8 Samsungin Windows Phone mallit HTC:n mallit www.windowsphone.com
Mirva Jääskeläinen Espoon kaupungin työväenopisto Windows Phonet yleisesti Nokian Lumiat Vanhemmat WindowsPhone 7 Uudemmat WindowsPhone 8 Samsungin Windows Phone mallit HTC:n mallit www.windowsphone.com
Kokeile kuvasuunnistusta. 3D:nä
 Kokeile kuvasuunnistusta 3D:nä Oheinen 3D-kuvasuunnistus on julkaistu Suunnistaja-lehdessä 1/13. Tämä kuvasuunnistus on toteutettu tarkkuussuunnistuksen aikarastitehtävän mukaisesti. Aikarastilla kartta
Kokeile kuvasuunnistusta 3D:nä Oheinen 3D-kuvasuunnistus on julkaistu Suunnistaja-lehdessä 1/13. Tämä kuvasuunnistus on toteutettu tarkkuussuunnistuksen aikarastitehtävän mukaisesti. Aikarastilla kartta
Mobiilikartoituspäivä Pistepilvien ja kuvien hyödyntäminen Locusympäristössä
 Mobiilikartoituspäivä Pistepilvien ja kuvien hyödyntäminen Locusympäristössä Trimble Locus tuoteperhe Yleisten alueiden luvat Ympäristöluvat Palaute Omaisuuden hallinta - Katu- ja viheralueet - Kunnossapito
Mobiilikartoituspäivä Pistepilvien ja kuvien hyödyntäminen Locusympäristössä Trimble Locus tuoteperhe Yleisten alueiden luvat Ympäristöluvat Palaute Omaisuuden hallinta - Katu- ja viheralueet - Kunnossapito
Luento 3: 3D katselu. Sisältö
 Tietokonegrafiikan perusteet T-.43 3 op Luento 3: 3D katselu Lauri Savioja Janne Kontkanen /27 3D katselu / Sisältö Kertaus: koordinaattimuunnokset ja homogeeniset koordinaatit Näkymänmuodostus Kameran
Tietokonegrafiikan perusteet T-.43 3 op Luento 3: 3D katselu Lauri Savioja Janne Kontkanen /27 3D katselu / Sisältö Kertaus: koordinaattimuunnokset ja homogeeniset koordinaatit Näkymänmuodostus Kameran
(Petri Rönnholm / Henrik Haggrén, ) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot.
 Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot.") Maa-57.301 Fotogrammetrian yleiskurssi (Petri Rönnholm / Henrik Haggrén, 12.9.2005) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot. Mitä pitäisi oppia? Palauttaa
Maa-57.301 Fotogrammetrian yleiskurssi (Petri Rönnholm / Henrik Haggrén, 12.9.2005) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot. Mitä pitäisi oppia? Palauttaa
Tietokonegrafiikka. Jyry Suvilehto T Johdatus tietoliikenteeseen ja multimediatekniikkaan kevät 2014
 Tietokonegrafiikka Jyry Suvilehto T-110.1100 Johdatus tietoliikenteeseen ja multimediatekniikkaan kevät 2014 1. Sovellusalueita 2. Rasterigrafiikkaa 3. Vektorigrafiikkaa 4. 3D-grafiikkaa 1. Säteenheitto
Tietokonegrafiikka Jyry Suvilehto T-110.1100 Johdatus tietoliikenteeseen ja multimediatekniikkaan kevät 2014 1. Sovellusalueita 2. Rasterigrafiikkaa 3. Vektorigrafiikkaa 4. 3D-grafiikkaa 1. Säteenheitto
Teknillinen korkeakoulu T-76.115 Tietojenkäsittelyopin ohjelmatyö. Testitapaukset - Xlet
 Testitapaukset - Xlet Sisällysluettelo 1. Johdanto...3 2. Testattava järjestelmä...4 2.1 Koko järjestelmän yleiskuvaus...4 2.2 Xlet-demosovellus ja sen toimintaperiaate...5 3. Testitapaukset...6 3.1 Objektien
Testitapaukset - Xlet Sisällysluettelo 1. Johdanto...3 2. Testattava järjestelmä...4 2.1 Koko järjestelmän yleiskuvaus...4 2.2 Xlet-demosovellus ja sen toimintaperiaate...5 3. Testitapaukset...6 3.1 Objektien
Paikkatietotyökalut osallistavassa suunnittelussa. Toni Sankari Oulun ammattikorkeakoulu 7.5.2014
 Paikkatietotyökalut osallistavassa suunnittelussa Toni Sankari Oulun ammattikorkeakoulu 7.5.2014 Mitä osallistavan suunnittelun paikkatietotyökaluilla tarkoitetaan? Nettiselaimen välityksellä käytettäviä
Paikkatietotyökalut osallistavassa suunnittelussa Toni Sankari Oulun ammattikorkeakoulu 7.5.2014 Mitä osallistavan suunnittelun paikkatietotyökaluilla tarkoitetaan? Nettiselaimen välityksellä käytettäviä
TIEDONHAKU INTERNETISTÄ
 TIEDONHAKU INTERNETISTÄ Internetistä löytyy hyvin paljon tietoa. Tietoa ei ole mitenkään järjestetty, joten tiedonhaku voi olla hankalaa. Tieto myös muuttuu jatkuvasti. Tänään tehty tiedonhaku ei anna
TIEDONHAKU INTERNETISTÄ Internetistä löytyy hyvin paljon tietoa. Tietoa ei ole mitenkään järjestetty, joten tiedonhaku voi olla hankalaa. Tieto myös muuttuu jatkuvasti. Tänään tehty tiedonhaku ei anna
Nauti muistoista enemmän Sonyn. PlayMemories-sovellusperheellä
 osokuna Lehdistötiedote Julkaisuvapaa 29.8.2012 klo 17.45 Nauti muistoista enemmän Sonyn PlayMemories-sovellusperheellä Sonyn PlayMemories-sovellusperhe monipuolistaa kameraan, älypuhelimeen ja tablettiin
osokuna Lehdistötiedote Julkaisuvapaa 29.8.2012 klo 17.45 Nauti muistoista enemmän Sonyn PlayMemories-sovellusperheellä Sonyn PlayMemories-sovellusperhe monipuolistaa kameraan, älypuhelimeen ja tablettiin
Nokia Lifeblog 2.5 Nokia N76-1
 Nokia Lifeblog 2.5 Nokia N76-1 2007 Nokia. Kaikki oikeudet pidätetään. Nokia, Nokia Connecting People, Nseries ja N76 ovat Nokia Oyj:n tavaramerkkejä tai rekisteröityjä tavaramerkkejä. Muut tässä asiakirjassa
Nokia Lifeblog 2.5 Nokia N76-1 2007 Nokia. Kaikki oikeudet pidätetään. Nokia, Nokia Connecting People, Nseries ja N76 ovat Nokia Oyj:n tavaramerkkejä tai rekisteröityjä tavaramerkkejä. Muut tässä asiakirjassa
Maa-57.260. Kameran kalibrointi. TKK/Fotogrammetria/PP
 Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
www.terrasolid.com Kaupunkimallit
 www.terrasolid.com Kaupunkimallit Arttu Soininen 03.12.2015 Vuonna 1993 Isoja askeleita 1993-2015 Laserkeilaus helikopterilla/lentokoneella Laserkeilaus paikaltaan GPS+IMU yleistynyt kaikkeen ilmasta mittaukseen
www.terrasolid.com Kaupunkimallit Arttu Soininen 03.12.2015 Vuonna 1993 Isoja askeleita 1993-2015 Laserkeilaus helikopterilla/lentokoneella Laserkeilaus paikaltaan GPS+IMU yleistynyt kaikkeen ilmasta mittaukseen
3D-kuvauksen tekniikat ja sovelluskohteet. Mikael Hornborg
 3D-kuvauksen tekniikat ja sovelluskohteet Mikael Hornborg Luennon sisältö 1. Optiset koordinaattimittauskoneet 2. 3D skannerit 3. Sovelluskohteet Johdanto Optiset mittaustekniikat perustuvat valoon ja
3D-kuvauksen tekniikat ja sovelluskohteet Mikael Hornborg Luennon sisältö 1. Optiset koordinaattimittauskoneet 2. 3D skannerit 3. Sovelluskohteet Johdanto Optiset mittaustekniikat perustuvat valoon ja
Luento 8: Kolmiointi AIHEITA. Kolmiointi. Maa-57.301 Fotogrammetrian yleiskurssi. Luento-ohjelma 1 2 3 4 5 6 7 8 9 10
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Tilanhallintatekniikat
 Tilanhallintatekniikat 3D grafiikkamoottoreissa Moottori on projektin osa joka vastaa tiettyjen toiminnallisuuksien hallinnasta hallitsee kaikki vastuualueen datat suorittaa kaikki tehtäväalueen toiminnot
Tilanhallintatekniikat 3D grafiikkamoottoreissa Moottori on projektin osa joka vastaa tiettyjen toiminnallisuuksien hallinnasta hallitsee kaikki vastuualueen datat suorittaa kaikki tehtäväalueen toiminnot
POWER TO YOUR NEXT STEP Tartu jokaiseen tilaisuuteen
 POWER TO YOUR NEXT STEP Tartu jokaiseen tilaisuuteen you can 2 Matkamme alkaa Laineet kutsuvat! Lautailukoulu alkaa Digitaalisen järjestelmäkameran teho Vaihda objektiivia, vaihda näkökulmaa Vaihdettavien
POWER TO YOUR NEXT STEP Tartu jokaiseen tilaisuuteen you can 2 Matkamme alkaa Laineet kutsuvat! Lautailukoulu alkaa Digitaalisen järjestelmäkameran teho Vaihda objektiivia, vaihda näkökulmaa Vaihdettavien
Googlen palvelut synkronoinnin apuna. Kampin palvelukeskus Jukka Hanhinen, Urho Karjalainen, Rene Tigerstedt, Pirjo Salo
 Googlen palvelut synkronoinnin apuna Kampin palvelukeskus 31.01.2018 Jukka Hanhinen, Urho Karjalainen, Rene Tigerstedt, Pirjo Salo Google-tili Jos käytät Gmail-sähköpostia niin sinulla on Google-tili (nn.nn@gmail.com)
Googlen palvelut synkronoinnin apuna Kampin palvelukeskus 31.01.2018 Jukka Hanhinen, Urho Karjalainen, Rene Tigerstedt, Pirjo Salo Google-tili Jos käytät Gmail-sähköpostia niin sinulla on Google-tili (nn.nn@gmail.com)
Miten piensarjatuotantoon saadaan joustavuutta?
 Miten piensarjatuotantoon saadaan joustavuutta? Jyrki Latokartano, Tampereen teknillinen yliopisto Modernin robottitekniikan mahdollisuudet tuotannossa SeAMK 4.4.2017 kello 12.30-16.00 Miten piensarjatuotantoon
Miten piensarjatuotantoon saadaan joustavuutta? Jyrki Latokartano, Tampereen teknillinen yliopisto Modernin robottitekniikan mahdollisuudet tuotannossa SeAMK 4.4.2017 kello 12.30-16.00 Miten piensarjatuotantoon
Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 13.10.2004) Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus AIHEITA Stereomittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 13.10.2004) Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus AIHEITA Stereomittaus
2007 Nokia. Kaikki oikeudet pidätetään. Nokia, Nokia Connecting People, Nseries ja N77 ovat Nokia Oyj:n tavaramerkkejä tai rekisteröityjä
 Nokia Lifeblog 2.5 2007 Nokia. Kaikki oikeudet pidätetään. Nokia, Nokia Connecting People, Nseries ja N77 ovat Nokia Oyj:n tavaramerkkejä tai rekisteröityjä tavaramerkkejä. Muut tässä asiakirjassa mainitut
Nokia Lifeblog 2.5 2007 Nokia. Kaikki oikeudet pidätetään. Nokia, Nokia Connecting People, Nseries ja N77 ovat Nokia Oyj:n tavaramerkkejä tai rekisteröityjä tavaramerkkejä. Muut tässä asiakirjassa mainitut
Ikaalinen Iso-Kalajärvi ranta-asemakaava-alueen muinaisjäännösinventointi 2014
 1 Ikaalinen Iso-Kalajärvi ranta-asemakaava-alueen muinaisjäännösinventointi 2014 Hannu Poutiainen Tilaaja: Ikaalisten kaupunki 2 Sisältö Perustiedot... 2 Yleiskartat... 3 Tutkimus... 4 Havainnot ja yhteenveto...
1 Ikaalinen Iso-Kalajärvi ranta-asemakaava-alueen muinaisjäännösinventointi 2014 Hannu Poutiainen Tilaaja: Ikaalisten kaupunki 2 Sisältö Perustiedot... 2 Yleiskartat... 3 Tutkimus... 4 Havainnot ja yhteenveto...
Tekijänoikeus Tekijänoikeusbarometri_ttu&ple
 Tekijänoikeus Suomalaiset pitävät tekijänoikeuksia tärkeänä asiana Vastaajia pyydettiin kertomaan, mitä mieltä he ovat tekijänoikeuksista. Haastatelluille esitettiin kolme kuvailevaa sanaparia: tärkeä
Tekijänoikeus Suomalaiset pitävät tekijänoikeuksia tärkeänä asiana Vastaajia pyydettiin kertomaan, mitä mieltä he ovat tekijänoikeuksista. Haastatelluille esitettiin kolme kuvailevaa sanaparia: tärkeä
JUHTA - Julkisen hallinnon tietohallinnon neuvottelukunta
 JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 6: EUREF-FIN:n ja KKJ:n välinen kolmiulotteinen yhdenmuotoisuusmuunnos ja sen tarkkuus Versio: 1.0 / 3.2.2016
JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 6: EUREF-FIN:n ja KKJ:n välinen kolmiulotteinen yhdenmuotoisuusmuunnos ja sen tarkkuus Versio: 1.0 / 3.2.2016
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA. Lauri Karppi j82095. SATE.2010 Dynaaminen kenttäteoria DIPOLIRYHMÄANTENNI.
 VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Oskari Uitto i78966 Lauri Karppi j82095 SATE.2010 Dynaaminen kenttäteoria DIPOLIRYHMÄANTENNI Sivumäärä: 14 Jätetty tarkastettavaksi: 25.02.2008 Työn
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Oskari Uitto i78966 Lauri Karppi j82095 SATE.2010 Dynaaminen kenttäteoria DIPOLIRYHMÄANTENNI Sivumäärä: 14 Jätetty tarkastettavaksi: 25.02.2008 Työn
Valokuvaus ja kuvankäsittely kurssin portfolio
 Valokuvaus ja kuvankäsittely kurssin portfolio Juha Karjalainen Kurssin ensimmäinen tehtävä Ensimmäisenä tehtävänämme oli ottaa kuvia järjestelmäkameralla eri asetuksilla kuten valotusaika, polttoväli
Valokuvaus ja kuvankäsittely kurssin portfolio Juha Karjalainen Kurssin ensimmäinen tehtävä Ensimmäisenä tehtävänämme oli ottaa kuvia järjestelmäkameralla eri asetuksilla kuten valotusaika, polttoväli
I AM YOUR 1 NIKKOR FINDER
 I AM YOUR FINDER I AM VISUAL PERFECTION Nikon 1 -järjestelmäkameroilla elämäsi vauhdikkaimpien hetkien ikuistaminen onnistuu kätevästi. Vaihdettavalla objektiivilla varustetut Nikon 1 -kamerat ovat erittäin
I AM YOUR FINDER I AM VISUAL PERFECTION Nikon 1 -järjestelmäkameroilla elämäsi vauhdikkaimpien hetkien ikuistaminen onnistuu kätevästi. Vaihdettavalla objektiivilla varustetut Nikon 1 -kamerat ovat erittäin
Testiautomaatio tietovarastossa. Automaattisen regressiotestauksen periaate ja hyödyt
 Testiautomaatio tietovarastossa Automaattisen regressiotestauksen periaate ja hyödyt Sisältö 2 Testaus kiinteänä osana DW-toteutusta Regressiotestauksen merkitys Robot Framework Automatisoitu DW:n regressiotestaus:
Testiautomaatio tietovarastossa Automaattisen regressiotestauksen periaate ja hyödyt Sisältö 2 Testaus kiinteänä osana DW-toteutusta Regressiotestauksen merkitys Robot Framework Automatisoitu DW:n regressiotestaus:
Digimarkkinoinnin uudet pelisäännöt Huhtikuu 2015
 Digimarkkinoinnin uudet pelisäännöt Huhtikuu 2015 Any sufficiently advanced technology is indistinguishable from magic. - Arthur C Clarke Millaisia mahdollisuuksia uudet teknologiat tarjoavat? Internet
Digimarkkinoinnin uudet pelisäännöt Huhtikuu 2015 Any sufficiently advanced technology is indistinguishable from magic. - Arthur C Clarke Millaisia mahdollisuuksia uudet teknologiat tarjoavat? Internet
ipad maahanmuuttajien ohjauksessa Laitteen käyttöönotto Kotomaatti 2016
 ipad maahanmuuttajien ohjauksessa Laitteen käyttöönotto Kotomaatti 2016 Sisältö hyperlinkkeinä Miten ipad avataan ja suljetaan? Miten sovellukset avataan ja suljetaan? Kuinka luodaan kansio? Kuinka käytän
ipad maahanmuuttajien ohjauksessa Laitteen käyttöönotto Kotomaatti 2016 Sisältö hyperlinkkeinä Miten ipad avataan ja suljetaan? Miten sovellukset avataan ja suljetaan? Kuinka luodaan kansio? Kuinka käytän
Wildgame Innovations Riistakamera Blade X6 Lightsout (t6b1)
") Wildgame Innovations Riistakamera Blade X6 Lightsout (t6b1) Pakkauksen sisältö: USB Kaapeli 2 kpl kiinnitysmustekaloja Player -ohjelmisto Kamerayksikkö Käyttöohje HUOM: Player -ohjelmistoa ei ole pakollista
Wildgame Innovations Riistakamera Blade X6 Lightsout (t6b1) Pakkauksen sisältö: USB Kaapeli 2 kpl kiinnitysmustekaloja Player -ohjelmisto Kamerayksikkö Käyttöohje HUOM: Player -ohjelmistoa ei ole pakollista
Luento 4: Kiertomatriisi
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Paikkatietokantojen EUREFmuunnoksen
 Paikkatietokantojen EUREFmuunnoksen käytännön toteutus EUREF-II teemapäivä Jukka Vänttinen Sisältö Koordinaattimuunnokset Teklan ohjelmistoissa Muunnostyön valmistelu ja vaiheistus Muunnokset tietojärjestelmän
Paikkatietokantojen EUREFmuunnoksen käytännön toteutus EUREF-II teemapäivä Jukka Vänttinen Sisältö Koordinaattimuunnokset Teklan ohjelmistoissa Muunnostyön valmistelu ja vaiheistus Muunnokset tietojärjestelmän
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 2: Usean muuttujan funktiot
 Luento 2: Usean muuttujan funktiot") MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 2: Usean muuttujan funktiot Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 2016 Antti Rasila (Aalto-yliopisto)
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 2: Usean muuttujan funktiot Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 2016 Antti Rasila (Aalto-yliopisto)
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 6 1 Korkolaskentaa Oletetaan, että korkoaste on r Jos esimerkiksi r = 0, 02, niin korko on 2 prosenttia Tätä korkoastetta käytettään diskonttaamaan tulevia tuloja ja
Matematiikan tukikurssi Kurssikerta 6 1 Korkolaskentaa Oletetaan, että korkoaste on r Jos esimerkiksi r = 0, 02, niin korko on 2 prosenttia Tätä korkoastetta käytettään diskonttaamaan tulevia tuloja ja
Löydä Helsinki. Mobiili infopalvelu lukutaidottomille helsinkiläisille Olga Kaijalainen. KYKY II Stadin osaamiskeskus Helsingin kaupunki
 Löydä Helsinki Mobiili infopalvelu lukutaidottomille helsinkiläisille 13.10.2018 Olga Kaijalainen KYKY II Stadin osaamiskeskus Helsingin kaupunki loydahelsinki.fi Onko ryhmissänne lukutaidottomia aikuisia?
Löydä Helsinki Mobiili infopalvelu lukutaidottomille helsinkiläisille 13.10.2018 Olga Kaijalainen KYKY II Stadin osaamiskeskus Helsingin kaupunki loydahelsinki.fi Onko ryhmissänne lukutaidottomia aikuisia?
Kuvien kanssa työskentely GeoGebrassa
 Kuvien kanssa työskentely GeoGebrassa Paitsi, että GeoGebrassa piirrettyjä kuvia voidaan viedä tekstitiedostoon, myös kuvia voidaan tuoda GeoGebran piirtoalustalle. tätä varten löytyy työväline Lisää kuva
Kuvien kanssa työskentely GeoGebrassa Paitsi, että GeoGebrassa piirrettyjä kuvia voidaan viedä tekstitiedostoon, myös kuvia voidaan tuoda GeoGebran piirtoalustalle. tätä varten löytyy työväline Lisää kuva
S09 04 Kohteiden tunnistaminen 3D datasta
 AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
TERVETULOA WAHTI-PALVELUN KÄYTTÄJÄKSI. Ohjeet kameran asennukseen ja käyttöönottoon.
 TERVETULOA WAHTI-PALVELUN KÄYTTÄJÄKSI. Ohjeet kameran asennukseen ja käyttöönottoon. 1 SISÄLLYSLUETTELO Pakkauksen sisältö Sisäkameran asennusohjeet Palvelun kuvakkeiden merkitys ja toiminnot Paluu etusivulle
TERVETULOA WAHTI-PALVELUN KÄYTTÄJÄKSI. Ohjeet kameran asennukseen ja käyttöönottoon. 1 SISÄLLYSLUETTELO Pakkauksen sisältö Sisäkameran asennusohjeet Palvelun kuvakkeiden merkitys ja toiminnot Paluu etusivulle
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
Liikkuva-sovellusprojekti
 Liikkuva-sovellusprojekti Joel Kivelä Erkki Koskenkorva Mika Lehtinen Oskari Leppäaho Petri Partanen Vaatimusmäärittely Julkinen Versio 030 2822014 Jyväskylän yliopisto Tietotekniikan laitos Jyväskylä
Liikkuva-sovellusprojekti Joel Kivelä Erkki Koskenkorva Mika Lehtinen Oskari Leppäaho Petri Partanen Vaatimusmäärittely Julkinen Versio 030 2822014 Jyväskylän yliopisto Tietotekniikan laitos Jyväskylä