TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta. Yliassistentti Jussi Hakanen syksy 2010
|
|
|
- Risto Ranta
- 10 vuotta sitten
- Katselukertoja:
Transkriptio
1 TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen syksy 2010

2 NSGA-II Non-dominated Sorting Genetic Algorithm (NSGA) Ehkä tunnetuin EMO-menetelmä Srinivas & Deb, Evolutionary Computation, 2, 1995 (NSGA) Deb, Pratap, Agarwal & Meyariven, IEEE Transactions on Evolutionary Computation, 6, 2002 (NSGA-II)

3 NSGA-II Ominaisuuksia elitistinen algoritmi: populaation paras ratkaisu siirtyy automaattisesti seuraavaan sukupolveen eksplisiittinen mekanismi ratkaisujen hyvän jakautumisen säilyttämiseen korostaa dominoimattomia ratkaisuja

4 NSGA-II Idea: uutta sukupolvea muodostettaessa alkuperäistä populaatiota käyttäen muodostetaan jälkeläispopulaatio (käyttäen geneettisiä operaattoreita) alkuperäinen populaatio ja jälkeläispopulaatio yhdistetään populaatio, jonka koko on 2N, populaation koko = N saatu populaatio jaetaan luokkiin käyttäen dominanssia uuteen sukupolveen valitaan ratkaisut luokkien mukaan 1. alkaen kunnes valittuna on N ratkaisua

5 NSGA-II f 2, min alkuperäinen & jälkeläispopulaatio (2N, N=7) 1. luokan dominoimattomat ratkaisut 2. luokan dominoimattomat ratkaisut 3. luokan dominoimattomat ratkaisut 4. luokan dominoimattomat ratkaisut uuteen sukupolveen pääsevät kuvan tapauksessa kaikki 1. ja 2. luokan dominoimattomat ratkaisut (N=7) f 1, min

6 NSGA-II Edellisen kuvan tapauksessa uuteen sukupolveen pääsivät siis 1. ja 2. luokan ratkaisut (N=7 ratkaisua) Jos esim. populaation koko olisi ollut 10, niin mukaan olisi mahtunut vielä kolme ratkaisua 3. luokan dominoimattomista ratkaisuista 3. luokan ratkaisuista mukaan olisi valittu ne kolme, jotka olisivat antaneet parhaimman diversiteetin (suurin etäisyys muihin ratkaisuihin, crowding distance)

7 NSGA-II f 2, min 3. luokan dominoimattomat ratkaisut f 1, min Ääriratkaisut (1. & 4.) saavat etäisyyden eli ne valitaan aina Muille etäisyys lasketaan kahden vierekkäisen ratkaisun määräämän kuution tilavuutena Jos kuvan ratkaisuista valitaan 3, niin valituksi tulevat 1 ja 4 sekä 3

8 NSGA-II Valmiita toteutuksia Prof. Kalyanmoy Deb, Kanpur Genetic Algorithms Laboratory MATLAB Central (file exchange) change/10429
 http://www.")
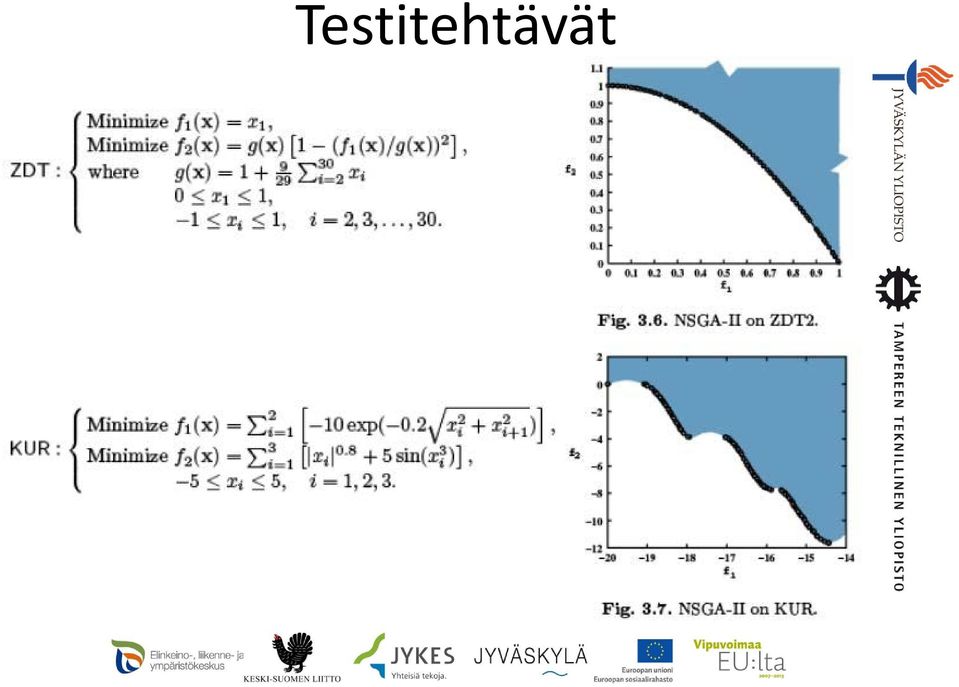
9 Testitehtävät EMO-menetelmien suorituskyvyn mittaamiseen on kehitetty erilaisia testitehtäviä, joiden Paretooptimaaliset joukot tunnetaan Menetelmän antamaa ratkaisupopulaatiota voidaan sitten verrata tarkkaan ratkaisuun Testitehtävät on yleensä muodostettu siten, että niitä voidaan skaalata (esim. muuttujien määrää voi säätää) Tarkasteltavia kriteereitä ovat populaation etäisyys PO joukosta ratkaisujen jakautuminen PO joukkoon PO joukon kattaminen
 Tarkasteltavia kriteereitä ovat populaation etäisyys PO joukosta ratkaisujen")
10 Testitehtävät f 2, min PO joukko ratkaisupopulaatio referenssipiste f 1, min Suorituskyvyn mittaamiseen on kehitetty erilaisia metriikoita esim. mitataan populaation dominoiman sallitun alueen suuruutta mitä suurempi ala sitä parempi ratkaisu

11 Testitehtävät Tunnettuja testitehtäviä ovat mm. Kursawe, 1990 (2 objektifunktiota) ZDT-tehtävät, 2000 (2 objektifunktiota) DTLZ-tehtävät, 2001 (2 tai useampia objektifunktioita)

12 Testitehtävät
13 Esimerkki: Kemiallinen erotusprosessi Tarkastellaan kromatografiaan perustuvaa kemiallista erotusprosessia Käytetään moniin tärkeisiin erotusprosesseihin (mm. sokeri-, petrokemian- ja lääketeollisuudessa) Perustuu eri kemiallisten komponenttien nopeuseroon nesteessä *
 Perustuu eri kemiallisten")
14 Kemiallinen erotusprosessi Syöte- ja poistovirtojen paikkaa vaihdetaan säännöllisin väliajoin (askelaika) Säätömuuttujat askelaika virtausnopeudet

15 Kemiallinen erotusprosessi Simulated Moving Bed (SMB) prosessia on optimoitu myös käyttäen NSGA-menetelmää Subramani, Hidajat & Ray, Optimization of reactive SMB and Varicol systems, Computers and Chemical Engineering, 27, 2003 Kahden ja kolmen objektifunktion tehtäviä ratkottu Monitavoiteoptimointia käytetty vertailemaan normaalia (samanaikainen syöte- ja poistovirtojen paikkojen vaihto) ja modifioitua SMB-prosessia (ei-samanaikainen vaihto)
 ja modifioitua SMB-prosessia")
16 Kemiallinen erotusprosessi 4 eri tapausta olemassa olevan SMB-prosessin optimointi max tuotteen puhtaus ja saanto, min liuottimen määrä SMB-prosessin optimaalinen suunnittelu max tuotteen puhtaus, min kiinteät ja käyttökustannukset modifioidun SMB-prosessin optimointi ja vertailu SMB-prosessiin samat tavoitteet kuin 1. tapauksessa kiinteiden ja käyttökustannusten minimointi tavalliselle sekä modifioidulle SMB-prosessille

17 Kemiallinen erotusprosessi max tuotteen puhtaus (P MTBE ) ja saanto (Y MTBE ), min liuottimen määrä (γ) Visualisointi ratkaisupopulaatiosta 1. tapauksessa visualisoitu kahden objektifunktion suhteen

18 Ratkaisujen visualisointi f 2, min Pareto-optimaalisten ratkaisujen visualisointi DM arvioi ja vertailee saatuja ratkaisuja Objektifunktioita 2, visualisointi helppoa voidaan esittää tason pisteinä f 1, min

19 Ratkaisujen visualisointi Objektifunktioita 3, onnistuu mutta tulkinta hankalampaa PO joukko on pinta 3-D:ssä

20 Ratkaisujen visualisointi Objektifunktioita > 3, visualisointi hankaloituu PO joukon approksimaatiota ei voi suoraan visualisoida Voidaan visualisoida esim. PO joukon projektioita 2:n tai 3:n objektifunktion suhteen (vrt. kemiallisen erotusprosessin optimointi edellä) kaikki PO pisteet eivät näytä Pareto-optimaalisilta projektioissa
 kaikki PO pisteet eivät näytä")
21 Ratkaisujen visualisointi Yleensä visualisoidaan vain pientä joukkoa PO ratkaisuja kun objektifunktioita > 3 Käytetään erilaisia tapoja visualisoida yksittäisiä ratkaisuja paras visualisointi riippuu tietenkin DM:stä Tavoitteena pystyä vertailemaan ratkaisuja
22 Ratkaisujen visualisointi Esimerkkejä: 3D palkit Yksi ratkaisu on yksi väri
23 Ratkaisujen visualisointi Arvopolut: yksi ratkaisu on yksi murtoviiva
24 Ratkaisujen visualisointi Petal diagram: yksi ratkaisu on yksi kiekko Mitä enemmän väriä sitä huonompi arvo
25 Ratkaisujen visualisointi Whisker plot: yksi ratkaisu on yksi kiekko Mitä enemmän väriä sitä huonompi arvo
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta. Yliassistentti Jussi Hakanen syksy 2010
 TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 PO pisteiden määräämismenetelmät Idea: tuotetaan erilaisia PO ratkaisuita, joista
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 PO pisteiden määräämismenetelmät Idea: tuotetaan erilaisia PO ratkaisuita, joista
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta. Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010
 TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Monitavoiteoptimointi Mitä monitavoitteisuus tarkoittaa? Halutaan saavuttaa
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Monitavoiteoptimointi Mitä monitavoitteisuus tarkoittaa? Halutaan saavuttaa
TIES483 Epälineaarinen optimointi
 TIES483 Epälineaarinen optimointi Käytännön optimointiongelmien ratkaiseminen jussi.hakanen@jyu.fi Syksy 2012 Käytännön optimointiongelmien ratkaiseminen Käytännössä tulee kiinnittää huomiota ainakin seuraaviin
TIES483 Epälineaarinen optimointi Käytännön optimointiongelmien ratkaiseminen jussi.hakanen@jyu.fi Syksy 2012 Käytännön optimointiongelmien ratkaiseminen Käytännössä tulee kiinnittää huomiota ainakin seuraaviin
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta. Yliassistentti Jussi Hakanen syksy 2010
 TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Evoluutiopohjainen monitavoiteoptimointi MCDM ja EMO Monitavoiteoptimointi kuuluu
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Evoluutiopohjainen monitavoiteoptimointi MCDM ja EMO Monitavoiteoptimointi kuuluu
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta. Yliassistentti Jussi Hakanen syksy 2010
 TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Optimaalisuus: objektiavaruus f 2 min Z = f(s) Parhaat arvot alhaalla ja vasemmalla
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Optimaalisuus: objektiavaruus f 2 min Z = f(s) Parhaat arvot alhaalla ja vasemmalla
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta. Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010
 TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Tasaväliset PO pisteet? Painokerroinmenetelmä: muutetaan painoja systemaattisesti
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Tasaväliset PO pisteet? Painokerroinmenetelmä: muutetaan painoja systemaattisesti
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta. Yliassistentti Jussi Hakanen syksy 2010
 TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Käytännön optimointiongelmien ratkaiseminen Käytännön optimointiongelmien ratkaiseminen
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Käytännön optimointiongelmien ratkaiseminen Käytännön optimointiongelmien ratkaiseminen
Monitavoiteoptimointi
 Monitavoiteoptimointi Useita erilaisia tavoitteita, eli useita objektifunktioita Tavoitteet yleensä ristiriitaisia ja yhteismitattomia Optimaalisuus tarkoittaa yleensä eri asiaa kuin yksitavoitteisessa
Monitavoiteoptimointi Useita erilaisia tavoitteita, eli useita objektifunktioita Tavoitteet yleensä ristiriitaisia ja yhteismitattomia Optimaalisuus tarkoittaa yleensä eri asiaa kuin yksitavoitteisessa
Implementation of Selected Metaheuristics to the Travelling Salesman Problem (valmiin työn esittely)
") Implementation of Selected Metaheuristics to the Travelling Salesman Problem (valmiin työn esittely) Jari Hast xx.12.2013 Ohjaaja: Harri Ehtamo Valvoja: Hari Ehtamo Työn saa tallentaa ja julkistaa Aalto-yliopiston
Implementation of Selected Metaheuristics to the Travelling Salesman Problem (valmiin työn esittely) Jari Hast xx.12.2013 Ohjaaja: Harri Ehtamo Valvoja: Hari Ehtamo Työn saa tallentaa ja julkistaa Aalto-yliopiston
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta. Yliassistentti Jussi Hakanen syksy 2010
 TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Yleistä https://korppi.jyu.fi/kotka/r.jsp?course=96762 Sisältö Johdanto yksitavoitteiseen
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Yleistä https://korppi.jyu.fi/kotka/r.jsp?course=96762 Sisältö Johdanto yksitavoitteiseen
Monitavoitteiseen optimointiin soveltuvan evoluutioalgoritmin tarkastelu
 Monitavoitteiseen optimointiin soveltuvan evoluutioalgoritmin tarkastelu (Valmiin työn esittely) 11.4.2011 Ohjaaja: Ville Mattila Valvoja: Raimo Hämäläinen Työn tavoite Tutkia evoluutioalgoritmia (Lee
Monitavoitteiseen optimointiin soveltuvan evoluutioalgoritmin tarkastelu (Valmiin työn esittely) 11.4.2011 Ohjaaja: Ville Mattila Valvoja: Raimo Hämäläinen Työn tavoite Tutkia evoluutioalgoritmia (Lee
Kombinatorinen optimointi
 Kombinatorinen optimointi Sallittujen pisteiden lukumäärä on äärellinen Periaatteessa ratkaisu löydetään käymällä läpi kaikki pisteet Käytännössä lukumäärä on niin suuri, että tämä on mahdotonta Usein
Kombinatorinen optimointi Sallittujen pisteiden lukumäärä on äärellinen Periaatteessa ratkaisu löydetään käymällä läpi kaikki pisteet Käytännössä lukumäärä on niin suuri, että tämä on mahdotonta Usein
Joonas Haapala Ohjaaja: DI Heikki Puustinen Valvoja: Prof. Kai Virtanen
 Hävittäjälentokoneen reitin suunnittelussa käytettävän dynaamisen ja monitavoitteisen verkko-optimointitehtävän ratkaiseminen A*-algoritmilla (valmiin työn esittely) Joonas Haapala 8.6.2015 Ohjaaja: DI
Hävittäjälentokoneen reitin suunnittelussa käytettävän dynaamisen ja monitavoitteisen verkko-optimointitehtävän ratkaiseminen A*-algoritmilla (valmiin työn esittely) Joonas Haapala 8.6.2015 Ohjaaja: DI
ÄÄNENVAIMENTIMIEN MALLINNUSPOHJAINEN MONITAVOITTEINEN MUODONOPTIMOINTI 1 JOHDANTO. Tuomas Airaksinen 1, Erkki Heikkola 2
 ÄÄNENVAIMENTIMIEN MALLINNUSPOHJAINEN MONITAVOITTEINEN MUODONOPTIMOINTI Tuomas Airaksinen 1, Erkki Heikkola 2 1 Jyväskylän yliopisto PL 35 (Agora), 40014 Jyväskylän yliopisto tuomas.a.airaksinen@jyu.fi
ÄÄNENVAIMENTIMIEN MALLINNUSPOHJAINEN MONITAVOITTEINEN MUODONOPTIMOINTI Tuomas Airaksinen 1, Erkki Heikkola 2 1 Jyväskylän yliopisto PL 35 (Agora), 40014 Jyväskylän yliopisto tuomas.a.airaksinen@jyu.fi
JYVÄSKYLÄN YLIOPISTO. 3. Luennon sisältö
 JYVÄSKYLÄN YLIOPISTO 3. Luennon sisältö Lineaarisen optimointitehtävän sallittu alue Optimointitehtävien muunnoksia Lineaarisen yhtälöryhmän perusmuoto ja perusratkaisut Lineaarisen optimointitehtävän
JYVÄSKYLÄN YLIOPISTO 3. Luennon sisältö Lineaarisen optimointitehtävän sallittu alue Optimointitehtävien muunnoksia Lineaarisen yhtälöryhmän perusmuoto ja perusratkaisut Lineaarisen optimointitehtävän
Lineaaristen monitavoiteoptimointitehtävien ratkaiseminen Bensonin algoritmilla
 Lineaaristen monitavoiteoptimointitehtävien ratkaiseminen Bensonin algoritmilla Juho Andelmin 21.01.2013 Ohjaaja: TkT Juuso Liesiö Valvoja: Prof. Raimo P. Hämäläinen Työn saa tallentaa ja julkistaa Aalto-yliopiston
Lineaaristen monitavoiteoptimointitehtävien ratkaiseminen Bensonin algoritmilla Juho Andelmin 21.01.2013 Ohjaaja: TkT Juuso Liesiö Valvoja: Prof. Raimo P. Hämäläinen Työn saa tallentaa ja julkistaa Aalto-yliopiston
TIES483 Epälineaarinen optimointi. Monitavoiteoptimointi Syksy 2012
 TIES483 Epälineaarinen optimointi Monitavoiteoptimointi jussi.hakanen@jyu.fi Syksy 2012 Sisältö Johdanto monitavoiteoptimointiin Monitavoiteoptimoinnin käsitteitä Menetelmätyypit Käytännön sovellusesimerkkejä
TIES483 Epälineaarinen optimointi Monitavoiteoptimointi jussi.hakanen@jyu.fi Syksy 2012 Sisältö Johdanto monitavoiteoptimointiin Monitavoiteoptimoinnin käsitteitä Menetelmätyypit Käytännön sovellusesimerkkejä
Lentotiedustelutietoon perustuva tykistön tulenkäytön optimointi (valmiin työn esittely)
") Lentotiedustelutietoon perustuva tykistön tulenkäytön optimointi (valmiin työn esittely) Tuukka Stewen 1.9.2017 Ohjaaja: DI Juho Roponen Valvoja: prof. Ahti Salo Työn saa tallentaa ja julkistaa Aalto-yliopiston
Lentotiedustelutietoon perustuva tykistön tulenkäytön optimointi (valmiin työn esittely) Tuukka Stewen 1.9.2017 Ohjaaja: DI Juho Roponen Valvoja: prof. Ahti Salo Työn saa tallentaa ja julkistaa Aalto-yliopiston
Parempaa äänenvaimennusta simuloinnilla ja optimoinnilla
 Parempaa äänenvaimennusta simuloinnilla ja optimoinnilla Erkki Heikkola Numerola Oy, Jyväskylä Laskennallisten tieteiden päivä 29.9.2010, Itä-Suomen yliopisto, Kuopio Putkistojen äänenvaimentimien suunnittelu
Parempaa äänenvaimennusta simuloinnilla ja optimoinnilla Erkki Heikkola Numerola Oy, Jyväskylä Laskennallisten tieteiden päivä 29.9.2010, Itä-Suomen yliopisto, Kuopio Putkistojen äänenvaimentimien suunnittelu
4. Luennon sisältö. Lineaarisen optimointitehtävän ratkaiseminen Simplex-menetelmä
 JYVÄSKYLÄN YLIOPISTO 4. Luennon sisältö Lineaarisen optimointitehtävän ratkaiseminen Simplex-menetelmä kevät 2012 TIEA382 Lineaarinen ja diskreetti optimointi Lineaarinen optimointitehtävä Minimointitehtävä
JYVÄSKYLÄN YLIOPISTO 4. Luennon sisältö Lineaarisen optimointitehtävän ratkaiseminen Simplex-menetelmä kevät 2012 TIEA382 Lineaarinen ja diskreetti optimointi Lineaarinen optimointitehtävä Minimointitehtävä
Lineaarisen kokonaislukuoptimointitehtävän ratkaiseminen
 Lineaarisen kokonaislukuoptimointitehtävän ratkaiseminen Jos sallittuja kokonaislukuratkaisuja ei ole kovin paljon, ne voidaan käydä kaikki läpi yksitellen Käytännössä tämä ei kuitenkaan ole yleensä mahdollista
Lineaarisen kokonaislukuoptimointitehtävän ratkaiseminen Jos sallittuja kokonaislukuratkaisuja ei ole kovin paljon, ne voidaan käydä kaikki läpi yksitellen Käytännössä tämä ei kuitenkaan ole yleensä mahdollista
OPTIMOINNIN JA PÄÄTÖKSENTEON MAISTERI- KOULUTUS (OPTI)
") OPTIMOINNIN JA PÄÄTÖKSENTEON MAISTERI- KOULUTUS (OPTI) 24.10.2013 JYVÄSKYLÄN YLIOPISTO INFORMAATIOTEKNOLOGIAN TIEDEKUNTA 2013 1. AJANKOHTAISUUS Kilpailu kiristyy kaikilla elämänalueilla koko ajan asiat
OPTIMOINNIN JA PÄÄTÖKSENTEON MAISTERI- KOULUTUS (OPTI) 24.10.2013 JYVÄSKYLÄN YLIOPISTO INFORMAATIOTEKNOLOGIAN TIEDEKUNTA 2013 1. AJANKOHTAISUUS Kilpailu kiristyy kaikilla elämänalueilla koko ajan asiat
TIEA382 Lineaarinen ja diskreetti optimointi
 TIEA382 Lineaarinen ja diskreetti optimointi Jussi Hakanen Tietotekniikan laitos jussi.hakanen@jyu.fi AgC 426.3 Yleiset tiedot Tietotekniikan kandidaattiopintojen valinnainen kurssi http://users.jyu.fi/~jhaka/ldo/
TIEA382 Lineaarinen ja diskreetti optimointi Jussi Hakanen Tietotekniikan laitos jussi.hakanen@jyu.fi AgC 426.3 Yleiset tiedot Tietotekniikan kandidaattiopintojen valinnainen kurssi http://users.jyu.fi/~jhaka/ldo/
Lineaarinen optimointitehtävä
 Lineaarinen optimointitehtävä Minimointitehtävä yhtälörajoittein: min kun n j=1 n j=1 c j x j a ij x j = b i x j 0 j = 1,..., n i = 1,..., m Merkitään: z = alkuperäisen objektifunktion arvo käsiteltävänä
Lineaarinen optimointitehtävä Minimointitehtävä yhtälörajoittein: min kun n j=1 n j=1 c j x j a ij x j = b i x j 0 j = 1,..., n i = 1,..., m Merkitään: z = alkuperäisen objektifunktion arvo käsiteltävänä
GA & robot path planning. Janne Haapsaari AUTO Geneettiset algoritmit
 GA & robot path planning Janne Haapsaari AUTO3070 - Geneettiset algoritmit GA robotiikassa Sovelluksia liikkeen optimoinnissa: * eri vapausasteisten robottien liikeratojen optimointi * autonomisten robottien
GA & robot path planning Janne Haapsaari AUTO3070 - Geneettiset algoritmit GA robotiikassa Sovelluksia liikkeen optimoinnissa: * eri vapausasteisten robottien liikeratojen optimointi * autonomisten robottien
TEKNILLINEN TIEDEKUNTA, MATEMATIIKAN JAOS
 1. Suorakaiteen muotoisen lämmönvaraajan korkeus on K, leveys L ja syvyys S yksikköä. Konvektiosta ja säteilystä johtuvat lämpöhäviöt ovat verrannollisia lämmönvaraajan lämpötilan T ja ympäristön lämpötilan
1. Suorakaiteen muotoisen lämmönvaraajan korkeus on K, leveys L ja syvyys S yksikköä. Konvektiosta ja säteilystä johtuvat lämpöhäviöt ovat verrannollisia lämmönvaraajan lämpötilan T ja ympäristön lämpötilan
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta. Yliassistentti Jussi Hakanen syksy 2010
 TIES592 Montavoteoptmont ja teollsten prosessen hallnta Ylassstentt Juss Hakanen juss.hakanen@jyu.f syksy 2010 Interaktvset menetelmät Idea: päätöksentekjää hyödynnetään aktvsest ratkasuprosessn akana
TIES592 Montavoteoptmont ja teollsten prosessen hallnta Ylassstentt Juss Hakanen juss.hakanen@jyu.f syksy 2010 Interaktvset menetelmät Idea: päätöksentekjää hyödynnetään aktvsest ratkasuprosessn akana
1. OHJAAMATON OPPIMINEN JA KLUSTEROINTI
 1. OHJAAMATON OPPIMINEN JA KLUSTEROINTI 1 1.1 Funktion optimointiin perustuvat klusterointialgoritmit Klusteroinnin onnistumista mittaavan funktion J optimointiin perustuvissa klusterointialgoritmeissä
1. OHJAAMATON OPPIMINEN JA KLUSTEROINTI 1 1.1 Funktion optimointiin perustuvat klusterointialgoritmit Klusteroinnin onnistumista mittaavan funktion J optimointiin perustuvissa klusterointialgoritmeissä
Arkkitehtuurien tutkimus Outi Räihä. OHJ-3200 Ohjelmistoarkkitehtuurit. Darwin-projekti. Johdanto
 OHJ-3200 Ohjelmistoarkkitehtuurit 1 Arkkitehtuurien tutkimus Outi Räihä 2 Darwin-projekti Darwin-projekti: Akatemian rahoitus 2009-2011 Arkkitehtuurisuunnittelu etsintäongelmana Geneettiset algoritmit
OHJ-3200 Ohjelmistoarkkitehtuurit 1 Arkkitehtuurien tutkimus Outi Räihä 2 Darwin-projekti Darwin-projekti: Akatemian rahoitus 2009-2011 Arkkitehtuurisuunnittelu etsintäongelmana Geneettiset algoritmit
Osakesalkun optimointi. Anni Halkola Turun yliopisto 2016
 Osakesalkun optimointi Anni Halkola Turun yliopisto 2016 Artikkeli Gleb Beliakov & Adil Bagirov (2006) Non-smooth optimization methods for computation of the Conditional Value-at-risk and portfolio optimization.
Osakesalkun optimointi Anni Halkola Turun yliopisto 2016 Artikkeli Gleb Beliakov & Adil Bagirov (2006) Non-smooth optimization methods for computation of the Conditional Value-at-risk and portfolio optimization.
Paikkatiedon käsittely 6. Kyselyn käsittely
 HELSINGIN YLIOPISTO HELSINGFORS UNIVERSITET UNIVERSITY OF HELSINKI Paikkatiedon käsittely 6. Kyselyn käsittely Antti Leino antti.leino@cs.helsinki.fi 1.2.2007 Tietojenkäsittelytieteen laitos Kysely indeksin
HELSINGIN YLIOPISTO HELSINGFORS UNIVERSITET UNIVERSITY OF HELSINKI Paikkatiedon käsittely 6. Kyselyn käsittely Antti Leino antti.leino@cs.helsinki.fi 1.2.2007 Tietojenkäsittelytieteen laitos Kysely indeksin
A W F P. A W F P Hellävarainen kemiallinen pesu. Erittäin hellävarainen konepesu enintään ilmoitetussa lämpötilassa.
 30 40 50 60 70 95 Konepesu enintään ilmoitetussa lämpötilassa. 30 40 50 60 70 95 Erittäin hellävarainen konepesu enintään ilmoitetussa lämpötilassa. 30 40 Erittäin hellävarainen konepesu enintään ilmoitetussa
30 40 50 60 70 95 Konepesu enintään ilmoitetussa lämpötilassa. 30 40 50 60 70 95 Erittäin hellävarainen konepesu enintään ilmoitetussa lämpötilassa. 30 40 Erittäin hellävarainen konepesu enintään ilmoitetussa
Vesivoimaketjun optimointi mehiläisalgoritmilla (Valmiin työn esittely)
") Vesivoimaketjun optimointi mehiläisalgoritmilla (Valmiin työn esittely) Sakke Rantala 2.12.2013 Ohjaaja: DI Hannu Korva Valvoja: Professori Harri Ehtamo Työn saa tallentaa ja julkistaa Aalto-yliopiston
Vesivoimaketjun optimointi mehiläisalgoritmilla (Valmiin työn esittely) Sakke Rantala 2.12.2013 Ohjaaja: DI Hannu Korva Valvoja: Professori Harri Ehtamo Työn saa tallentaa ja julkistaa Aalto-yliopiston
1. OHJAAMATON OPPIMINEN JA KLUSTEROINTI
 1. OHJAAMATON OPPIMINEN JA KLUSTEROINTI 1 1.1 Funktion optimointiin perustuvat klusterointialgoritmit Klusteroinnin onnistumista mittaavan funktion J optimointiin perustuvissa klusterointialgoritmeissä
1. OHJAAMATON OPPIMINEN JA KLUSTEROINTI 1 1.1 Funktion optimointiin perustuvat klusterointialgoritmit Klusteroinnin onnistumista mittaavan funktion J optimointiin perustuvissa klusterointialgoritmeissä
Oulun yliopiston ja hankkeen toteuttaneiden tutkimusyksikköjen esittely
 Oulun yliopiston ja hankkeen toteuttaneiden tutkimusyksikköjen esittely Heini Postila (Vesi- ja ympäristötekniikka), Tiina Leiviskä (Kemiallinen prosessitekniikka) ja Satu Pitkäaho (Ympäristö- ja kemiantekniikka)
Oulun yliopiston ja hankkeen toteuttaneiden tutkimusyksikköjen esittely Heini Postila (Vesi- ja ympäristötekniikka), Tiina Leiviskä (Kemiallinen prosessitekniikka) ja Satu Pitkäaho (Ympäristö- ja kemiantekniikka)
1 Kertaus. Lineaarinen optimointitehtävä on muotoa:
 1 Kertaus Lineaarinen optimointitehtävä on muotoa: min c 1 x 1 + c 2 x 2 + + c n x n kun a 11 x 1 + a 12 x 2 + + a 1n x n b 1 a 21 x 1 + a 22 x 2 + + a 2n x n b 2 (11) a m1 x 1 + a m2 x 2 + + a mn x n
1 Kertaus Lineaarinen optimointitehtävä on muotoa: min c 1 x 1 + c 2 x 2 + + c n x n kun a 11 x 1 + a 12 x 2 + + a 1n x n b 1 a 21 x 1 + a 22 x 2 + + a 2n x n b 2 (11) a m1 x 1 + a m2 x 2 + + a mn x n
Jälki- ja herkkyysanalyysi. Tutkitaan eri kertoimien ja vakioiden arvoissa tapahtuvien muutosten vaikutusta optimiratkaisuun
 Jälki- ja herkkyysanalyysi Tutkitaan eri kertoimien ja vakioiden arvoissa tapahtuvien muutosten vaikutusta optimiratkaisuun 1 Hinnat ja varjohinnat Objektifunktio c T x = Kerroin c j ilmoittaa, paljonko
Jälki- ja herkkyysanalyysi Tutkitaan eri kertoimien ja vakioiden arvoissa tapahtuvien muutosten vaikutusta optimiratkaisuun 1 Hinnat ja varjohinnat Objektifunktio c T x = Kerroin c j ilmoittaa, paljonko
Harjoitus 4: Matlab - Optimization Toolbox
 Harjoitus 4: Matlab - Optimization Toolbox Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Optimointimallin muodostaminen
Harjoitus 4: Matlab - Optimization Toolbox Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Optimointimallin muodostaminen
Diskriminanttianalyysi I
 Diskriminanttianalyysi I 12.4-12.5 Aira Hast 24.11.2010 Sisältö LDA:n kertaus LDA:n yleistäminen FDA FDA:n ja muiden menetelmien vertaaminen Estimaattien laskeminen Johdanto Lineaarinen diskriminanttianalyysi
Diskriminanttianalyysi I 12.4-12.5 Aira Hast 24.11.2010 Sisältö LDA:n kertaus LDA:n yleistäminen FDA FDA:n ja muiden menetelmien vertaaminen Estimaattien laskeminen Johdanto Lineaarinen diskriminanttianalyysi
f(n) = Ω(g(n)) jos ja vain jos g(n) = O(f(n))
 = Ω(g(n)) jos ja vain jos g(n) = O(f(n))") Määritelmä: on O(g(n)), jos on olemassa vakioarvot n 0 > 0 ja c > 0 siten, että c g(n) kun n > n 0 O eli iso-o tai ordo ilmaisee asymptoottisen ylärajan resurssivaatimusten kasvun suuruusluokalle Samankaltaisia
Määritelmä: on O(g(n)), jos on olemassa vakioarvot n 0 > 0 ja c > 0 siten, että c g(n) kun n > n 0 O eli iso-o tai ordo ilmaisee asymptoottisen ylärajan resurssivaatimusten kasvun suuruusluokalle Samankaltaisia
Optimointi. Etsitään parasta mahdollista ratkaisua annetuissa olosuhteissa. Ongelman mallintaminen. Mallin ratkaiseminen. Ratkaisun analysointi
 Optimointi Etsitään parasta mahdollista ratkaisua annetuissa olosuhteissa Ongelman mallintaminen Mallin ratkaiseminen Ratkaisun analysointi 1 Peruskäsitteitä Muuttujat: Sallittu alue: x = (x 1, x 2,...,
Optimointi Etsitään parasta mahdollista ratkaisua annetuissa olosuhteissa Ongelman mallintaminen Mallin ratkaiseminen Ratkaisun analysointi 1 Peruskäsitteitä Muuttujat: Sallittu alue: x = (x 1, x 2,...,
Logistinen regressio, separoivat hypertasot
 Logistinen regressio, separoivat hypertasot Topi Sikanen Logistinen regressio Aineisto jakautunut K luokkaan K=2 tärkeä erikoistapaus Halutaan mallintaa luokkien vedonlyöntikertoimia (odds) havaintojen
Logistinen regressio, separoivat hypertasot Topi Sikanen Logistinen regressio Aineisto jakautunut K luokkaan K=2 tärkeä erikoistapaus Halutaan mallintaa luokkien vedonlyöntikertoimia (odds) havaintojen
z 1+i (a) f (z) = 3z 4 5z 3 + 2z (b) f (z) = z 4z + 1 f (z) = 12z 3 15z 2 + 2
 f (z) = 3z 4 5z 3 + 2z (b) f (z) = z 4z + 1 f (z) = 12z 3 15z 2 + 2") BM20A5700 - Integraauunnokset Harjoitus 2 1. Laske seuraavat raja-arvot. -kohta ratkeaa, kun pistät sekä yläkerran että alakerran muotoon (z z 1 )(z z 2 ), missä siis z 1 ja z 2 ovat näiden lausekkeiden
BM20A5700 - Integraauunnokset Harjoitus 2 1. Laske seuraavat raja-arvot. -kohta ratkeaa, kun pistät sekä yläkerran että alakerran muotoon (z z 1 )(z z 2 ), missä siis z 1 ja z 2 ovat näiden lausekkeiden
Numeerinen analyysi Harjoitus 3 / Kevät 2017
 Numeerinen analyysi Harjoitus 3 / Kevät 2017 Palautus viimeistään perjantaina 17.3. Tehtävä 1: Tarkastellaan funktion f(x) = x evaluoimista välillä x [2.0, 2.3]. Muodosta interpoloiva polynomi p 3 (x),
Numeerinen analyysi Harjoitus 3 / Kevät 2017 Palautus viimeistään perjantaina 17.3. Tehtävä 1: Tarkastellaan funktion f(x) = x evaluoimista välillä x [2.0, 2.3]. Muodosta interpoloiva polynomi p 3 (x),
Scheduling of Genetic Analysis Workflows on Grid Environments (valmiin työn esittely) Arttu Voutilainen
 Arttu Voutilainen") Scheduling of Genetic Analysis Workflows on Grid Environments (valmiin työn esittely) Arttu Voutilainen 20.4.2015 Ohjaaja: FT Lauri Eronen (Biocomputing Platforms Ltd.) Valvoja: Prof. Harri Ehtamo Työn
Scheduling of Genetic Analysis Workflows on Grid Environments (valmiin työn esittely) Arttu Voutilainen 20.4.2015 Ohjaaja: FT Lauri Eronen (Biocomputing Platforms Ltd.) Valvoja: Prof. Harri Ehtamo Työn
Tuotantoprosessin optimaalinen aikataulutus (valmiin työn esittely)
") Tuotantoprosessin optimaalinen aikataulutus (valmiin työn esittely) Joona Kaivosoja 01.12.2014 Ohjaaja: DI Ville Mäkelä Valvoja: Prof. Ahti Salo Työn saa tallentaa ja julkistaa Aalto-yliopiston avoimilla
Tuotantoprosessin optimaalinen aikataulutus (valmiin työn esittely) Joona Kaivosoja 01.12.2014 Ohjaaja: DI Ville Mäkelä Valvoja: Prof. Ahti Salo Työn saa tallentaa ja julkistaa Aalto-yliopiston avoimilla
HePon ryhmäajokoulutus Ajomuodostelmat
 HePon ryhmäajokoulutus 9.4.2011 Ajomuodostelmat Peesaus Edellä ajavaan etäisyys 30 cm Kovissa nopeuksissa parikin metriä jo auttaa Älä aja renkaat limittäin Pidä veto koko ajan päällä Älä kiihdytä ja rullaa
HePon ryhmäajokoulutus 9.4.2011 Ajomuodostelmat Peesaus Edellä ajavaan etäisyys 30 cm Kovissa nopeuksissa parikin metriä jo auttaa Älä aja renkaat limittäin Pidä veto koko ajan päällä Älä kiihdytä ja rullaa
YLEISKUVA - Kysymykset
 INSIGHT Käyttöopas YLEISKUVA - Kysymykset 1. Insight - analysointityökalun käytön mahdollistamiseksi täytyy kyselyn raportti avata Beta - raportointityökalulla 1. Klikkaa Insight välilehteä raportilla
INSIGHT Käyttöopas YLEISKUVA - Kysymykset 1. Insight - analysointityökalun käytön mahdollistamiseksi täytyy kyselyn raportti avata Beta - raportointityökalulla 1. Klikkaa Insight välilehteä raportilla
Minimilatenssiongelman ratkaisualgoritmeja (valmiin työn esittely)
") Minimilatenssiongelman ratkaisualgoritmeja (valmiin työn esittely) Antti Salmela 03.03.2014 Ohjaaja: Harri Ehtamo Valvoja: Harri Ehtamo Työn saa tallentaa ja julkistaa Aalto-yliopiston avoimilla verkkosivuilla.
Minimilatenssiongelman ratkaisualgoritmeja (valmiin työn esittely) Antti Salmela 03.03.2014 Ohjaaja: Harri Ehtamo Valvoja: Harri Ehtamo Työn saa tallentaa ja julkistaa Aalto-yliopiston avoimilla verkkosivuilla.
Algoritmit 2. Luento 12 To Timo Männikkö
 Algoritmit 2 Luento 12 To 3.5.2018 Timo Männikkö Luento 12 Geneettiset algoritmit Simuloitu jäähdytys Merkkijonon sovitus Horspoolin algoritmi Algoritmit 2 Kevät 2018 Luento 12 To 3.5.2018 2/35 Algoritmien
Algoritmit 2 Luento 12 To 3.5.2018 Timo Männikkö Luento 12 Geneettiset algoritmit Simuloitu jäähdytys Merkkijonon sovitus Horspoolin algoritmi Algoritmit 2 Kevät 2018 Luento 12 To 3.5.2018 2/35 Algoritmien
Ke3130900 Kemiantekniikan tietotekniikka Luento 3
 Ke3130900 Kemiantekniikan tietotekniikka Luento 3 Kimmo Klemola 08.02.2007 February 8, 2007 Kimmo Klemola 1 Polymath Helppokäyttöinen Chemical Reaction Engineeringprofessorien tekemä Soveltuu monipuolisesti
Ke3130900 Kemiantekniikan tietotekniikka Luento 3 Kimmo Klemola 08.02.2007 February 8, 2007 Kimmo Klemola 1 Polymath Helppokäyttöinen Chemical Reaction Engineeringprofessorien tekemä Soveltuu monipuolisesti
Algoritmit 2. Luento 11 Ti Timo Männikkö
 Algoritmit 2 Luento 11 Ti 24.4.2018 Timo Männikkö Luento 11 Rajoitehaku Kapsäkkiongelma Kauppamatkustajan ongelma Paikallinen etsintä Lyhin virittävä puu Vaihtoalgoritmit Algoritmit 2 Kevät 2018 Luento
Algoritmit 2 Luento 11 Ti 24.4.2018 Timo Männikkö Luento 11 Rajoitehaku Kapsäkkiongelma Kauppamatkustajan ongelma Paikallinen etsintä Lyhin virittävä puu Vaihtoalgoritmit Algoritmit 2 Kevät 2018 Luento
Online-oppiva ilmavalvontajärjestelmän suorituskykymalli
 Online-oppiva ilmavalvontajärjestelmän suorituskykymalli MATINE tutkimusseminaari 17.11.2016 Juha Jylhä, Marja Ruotsalainen, Riitta Kerminen, Ari Visa Tampereen teknillinen yliopisto Signaalinkäsittelyn
Online-oppiva ilmavalvontajärjestelmän suorituskykymalli MATINE tutkimusseminaari 17.11.2016 Juha Jylhä, Marja Ruotsalainen, Riitta Kerminen, Ari Visa Tampereen teknillinen yliopisto Signaalinkäsittelyn
10. Esitys ja kuvaus
 10. Esitys ja kuvaus Kun kuva on ensin segmentoitu alueisiin edellisen luvun menetelmin, segmentoidut pikselit kootaan esittämään ja kuvaamaan kohteita muodossa, joka sopii hyvin jatkokäsittelyä varten.
10. Esitys ja kuvaus Kun kuva on ensin segmentoitu alueisiin edellisen luvun menetelmin, segmentoidut pikselit kootaan esittämään ja kuvaamaan kohteita muodossa, joka sopii hyvin jatkokäsittelyä varten.
Osakesalkun optimointi
 Osakesalkun optimointi Anni Halkola Epäsileä optimointi Turun yliopisto Huhtikuu 2016 Sisältö 1 Johdanto 1 2 Taustatietoja 2 3 Laskumetodit 3 3.1 Optimointiongelmat........................ 4 4 Epäsileän
Osakesalkun optimointi Anni Halkola Epäsileä optimointi Turun yliopisto Huhtikuu 2016 Sisältö 1 Johdanto 1 2 Taustatietoja 2 3 Laskumetodit 3 3.1 Optimointiongelmat........................ 4 4 Epäsileän
Paretoratkaisujen visualisointi
 Paretoratkaisujen visualisointi Optimointiopin seminaari - Kevät 2000 / 1 Esityksen sisältö Vaihtoehtoisten kohdevektorien visualisointi Arvopolut Palkkikaaviot Tähtikoordinaatit Hämähäkinverkkokaavio
Paretoratkaisujen visualisointi Optimointiopin seminaari - Kevät 2000 / 1 Esityksen sisältö Vaihtoehtoisten kohdevektorien visualisointi Arvopolut Palkkikaaviot Tähtikoordinaatit Hämähäkinverkkokaavio
Etsintä verkosta (Searching from the Web) T Datasta tietoon Heikki Mannila, Jouni Seppänen
 T Datasta tietoon Heikki Mannila, Jouni Seppänen") Etsintä verkosta (Searching from the Web) T-61.2010 Datasta tietoon Heikki Mannila, Jouni Seppänen 12.12.2007 Webin lyhyt historia http://info.cern.ch/proposal.html http://browser.arachne.cz/screen/
Etsintä verkosta (Searching from the Web) T-61.2010 Datasta tietoon Heikki Mannila, Jouni Seppänen 12.12.2007 Webin lyhyt historia http://info.cern.ch/proposal.html http://browser.arachne.cz/screen/
AS Automaation signaalinkäsittelymenetelmät. Tehtävä 1. Käynnistä fuzzy-toolboxi matlabin komentoikkunasta käskyllä fuzzy.
 AS-84.161 Automaation signaalinkäsittelymenetelmät Tehtävä 1. Käynnistä fuzzy-toolboxi matlabin komentoikkunasta käskyllä fuzzy. Tämän jälkeen täytyy: 1. Lisätä uusi sisääntulo edit->add input 2. nimetä
AS-84.161 Automaation signaalinkäsittelymenetelmät Tehtävä 1. Käynnistä fuzzy-toolboxi matlabin komentoikkunasta käskyllä fuzzy. Tämän jälkeen täytyy: 1. Lisätä uusi sisääntulo edit->add input 2. nimetä
monitavoitteisissa päätöspuissa (Valmiin työn esittely) Mio Parmi Ohjaaja: Prof. Kai Virtanen Valvoja: Prof.
 Mio Parmi Ohjaaja: Prof. Kai Virtanen Valvoja: Prof.") Epätäydellisen preferenssiinformaation hyödyntäminen monitavoitteisissa päätöspuissa (Valmiin työn esittely) Mio Parmi 15.1.2018 Ohjaaja: Prof. Kai Virtanen Valvoja: Prof. Kai Virtanen Tausta Päätöspuu
Epätäydellisen preferenssiinformaation hyödyntäminen monitavoitteisissa päätöspuissa (Valmiin työn esittely) Mio Parmi 15.1.2018 Ohjaaja: Prof. Kai Virtanen Valvoja: Prof. Kai Virtanen Tausta Päätöspuu
1. TILASTOLLINEN HAHMONTUNNISTUS
 1. TILASTOLLINEN HAHMONTUNNISTUS Tilastollisissa hahmontunnistusmenetelmissä piirteitä tarkastellaan tilastollisina muuttujina Luokittelussa käytetään hyväksi seuraavia tietoja: luokkien a priori tn:iä,
1. TILASTOLLINEN HAHMONTUNNISTUS Tilastollisissa hahmontunnistusmenetelmissä piirteitä tarkastellaan tilastollisina muuttujina Luokittelussa käytetään hyväksi seuraavia tietoja: luokkien a priori tn:iä,
Palautuslaite Boomerang ZHR
 Boomerang palautuslaitteen avulla yksi mies voi käyttää listoituskoneita ja/tai muita koneita ja laitteita puuntyöstössä. Ominaisuudet Arvot Työkappaleen mitat ilman kääntöyks. (mm) Pituus min. 300 max.
Boomerang palautuslaitteen avulla yksi mies voi käyttää listoituskoneita ja/tai muita koneita ja laitteita puuntyöstössä. Ominaisuudet Arvot Työkappaleen mitat ilman kääntöyks. (mm) Pituus min. 300 max.
Lineaarinen optimointitehtävä
 Lineaarinen optimointitehtävä min c 1 x 1 + c 2 x 2 + + c n x n kun a 11 x 1 + a 12 x 2 + + a 1n x n b 1 a 21 x 1 + a 22 x 2 + + a 2n x n b 2. a m1 x 1 + a m2 x 2 + + a mn x n b m x 1, x 2,..., x n 0 1
Lineaarinen optimointitehtävä min c 1 x 1 + c 2 x 2 + + c n x n kun a 11 x 1 + a 12 x 2 + + a 1n x n b 1 a 21 x 1 + a 22 x 2 + + a 2n x n b 2. a m1 x 1 + a m2 x 2 + + a mn x n b m x 1, x 2,..., x n 0 1
Tekoälykokeiluprojekti. Henkilökohtaisen kalenterin optimointi tekoälyllä Skycode Oy (ent. Suomen Mediatoimisto Oy)
") Tekoälykokeiluprojekti Henkilökohtaisen kalenterin optimointi tekoälyllä Skycode Oy (ent. Suomen Mediatoimisto Oy) 9.11.2018 Alkuperäinen idea Järjestelmän ideana on toimia yhdessä oman kalenterisi kanssa
Tekoälykokeiluprojekti Henkilökohtaisen kalenterin optimointi tekoälyllä Skycode Oy (ent. Suomen Mediatoimisto Oy) 9.11.2018 Alkuperäinen idea Järjestelmän ideana on toimia yhdessä oman kalenterisi kanssa
Algoritmit 2. Luento 12 Ke Timo Männikkö
 Algoritmit 2 Luento 12 Ke 26.4.2017 Timo Männikkö Luento 12 Rajoitehaku Kauppamatkustajan ongelma Lyhin virittävä puu Paikallinen etsintä Vaihtoalgoritmit Geneettiset algoritmit Simuloitu jäähdytys Algoritmit
Algoritmit 2 Luento 12 Ke 26.4.2017 Timo Männikkö Luento 12 Rajoitehaku Kauppamatkustajan ongelma Lyhin virittävä puu Paikallinen etsintä Vaihtoalgoritmit Geneettiset algoritmit Simuloitu jäähdytys Algoritmit
1 Komparatiivinen statiikka ja implisiittifunktiolause
 Taloustieteen matemaattiset menetelmät 27 materiaali 4 Komparatiivinen statiikka ja implisiittifunktiolause. Johdanto Jo opiskeltu antaa nyt valmiu tutkia taloudellisia malleja Kiinnostava malli voi olla
Taloustieteen matemaattiset menetelmät 27 materiaali 4 Komparatiivinen statiikka ja implisiittifunktiolause. Johdanto Jo opiskeltu antaa nyt valmiu tutkia taloudellisia malleja Kiinnostava malli voi olla
Harjoitus 9: Optimointi I (Matlab)
") Harjoitus 9: Optimointi I (Matlab) MS-C2107 Sovelletun matematiikan tietokonetyöt MS-C2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Optimointimallin muodostaminen Optimointitehtävien
Harjoitus 9: Optimointi I (Matlab) MS-C2107 Sovelletun matematiikan tietokonetyöt MS-C2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Optimointimallin muodostaminen Optimointitehtävien
Geneettiset algoritmit
 Geneettiset algoritmit Evoluution piirteitä laskennassa Optimoinnin perusteet - Kevät 2002 / 1 Sisältö Geneettisten algoritmien sovelluskenttä Peruskäsitteitä Esimerkkejä funktion ääriarvon etsintä vangin
Geneettiset algoritmit Evoluution piirteitä laskennassa Optimoinnin perusteet - Kevät 2002 / 1 Sisältö Geneettisten algoritmien sovelluskenttä Peruskäsitteitä Esimerkkejä funktion ääriarvon etsintä vangin
MATEMATIIKKA. Matematiikkaa pintakäsittelijöille PAOJ 3. Isto Jokinen 2013
 MATEMATIIKKA Matematiikkaa pintakäsittelijöille PAOJ 3. Isto Jokinen 2013 PROSENTTILASKENTA Prosentti on 1/100 tai 0,01. Esimerkki 40. Lukuarvo % 0,42 42 0,013 1,3 1,002 100,2 1/25 100/25=4 23/45 51,1
MATEMATIIKKA Matematiikkaa pintakäsittelijöille PAOJ 3. Isto Jokinen 2013 PROSENTTILASKENTA Prosentti on 1/100 tai 0,01. Esimerkki 40. Lukuarvo % 0,42 42 0,013 1,3 1,002 100,2 1/25 100/25=4 23/45 51,1
Tilastollinen vastepintamallinnus: kokeiden suunnittelu, regressiomallin analyysi, ja vasteen optimointi. Esimerkit laskettu JMP:llä
 Tilastollinen vastepintamallinnus: kokeiden suunnittelu, regressiomallin analyysi, ja vasteen optimointi Esimerkit laskettu JMP:llä Antti Hyttinen Tampereen teknillinen yliopisto 29.12.2003 ii Ohjelmien
Tilastollinen vastepintamallinnus: kokeiden suunnittelu, regressiomallin analyysi, ja vasteen optimointi Esimerkit laskettu JMP:llä Antti Hyttinen Tampereen teknillinen yliopisto 29.12.2003 ii Ohjelmien
TIES483 Epälineaarinen optimointi. Syksy 2012
 TIES483 Epälineaarinen optimointi jussi.hakanen@jyu.fi Syksy 2012 Yleistä Tietotekniikan syventävä kurssi, 5 op Pakollinen laskennallisten tieteiden FMopinnoissa (ent. simulointi ja optimointi) https://korppi.jyu.fi/kotka/r.jsp?course=134562
TIES483 Epälineaarinen optimointi jussi.hakanen@jyu.fi Syksy 2012 Yleistä Tietotekniikan syventävä kurssi, 5 op Pakollinen laskennallisten tieteiden FMopinnoissa (ent. simulointi ja optimointi) https://korppi.jyu.fi/kotka/r.jsp?course=134562
Keskeiset tulokset heikko duaalisuus (duaaliaukko, 6.2.1) vahva duaalisuus (6.2.4) satulapisteominaisuus (6.2.5) yhteys KKT ehtoihin (6.2.
 vahva duaalisuus (6.2.4) satulapisteominaisuus (6.2.5) yhteys KKT ehtoihin (6.2.") Duaalisuus Lagrangen duaalifunktio ja duaalitehtävä määrittely ja geometria max θ(u,v), missä θ(u,v)=inf x X ϕ(x,u,v) s.e u 0 Lagr. funktio ϕ(x,u,v)=f(x)+u T g(x)+v T h(x) Keskeiset tulokset heikko duaalisuus
Duaalisuus Lagrangen duaalifunktio ja duaalitehtävä määrittely ja geometria max θ(u,v), missä θ(u,v)=inf x X ϕ(x,u,v) s.e u 0 Lagr. funktio ϕ(x,u,v)=f(x)+u T g(x)+v T h(x) Keskeiset tulokset heikko duaalisuus
Fotogrammetrian seminaari. Kolmiulotteisen pinnanmuodostuksen asettamat vaatimukset 3D-digitoinnin suorittamiseen
 Fotogrammetrian seminaari Kolmiulotteisen pinnanmuodostuksen asettamat vaatimukset 3D-digitoinnin suorittamiseen 1 Johdanto...3 Alkuoletukset pisteaineistolle...3 Kolmiopinnan muodostaminen...5 2D-Marching
Fotogrammetrian seminaari Kolmiulotteisen pinnanmuodostuksen asettamat vaatimukset 3D-digitoinnin suorittamiseen 1 Johdanto...3 Alkuoletukset pisteaineistolle...3 Kolmiopinnan muodostaminen...5 2D-Marching
Mat Optimointiopin seminaari
 Lähde: Preferenssi-informaatio DEA-malleissa: Value Efficiency Analysis (VEA) -menetelmä Mat-2.4142 Optimointiopin seminaari 23.3.2011 Halme, M., Joro, T., Korhonen, P., Wallenius, J., 1999. A Value Efficiency
Lähde: Preferenssi-informaatio DEA-malleissa: Value Efficiency Analysis (VEA) -menetelmä Mat-2.4142 Optimointiopin seminaari 23.3.2011 Halme, M., Joro, T., Korhonen, P., Wallenius, J., 1999. A Value Efficiency
Automaatio mahdollistaa Software as a Service - arkkitehtuurin
 Automaatio mahdollistaa Software as a Service - arkkitehtuurin Softatyön trendit 11.6.2015 käytännön kokemuksia kehittämistyöstä Jussi Haaja Senior Systems Specialist Twitter @jussihaaja Esityksen sisältö
Automaatio mahdollistaa Software as a Service - arkkitehtuurin Softatyön trendit 11.6.2015 käytännön kokemuksia kehittämistyöstä Jussi Haaja Senior Systems Specialist Twitter @jussihaaja Esityksen sisältö
Informaation leviäminen väkijoukossa matemaattinen mallinnus
 Informaation leviäminen väkijoukossa matemaattinen mallinnus Tony Nysten 11.4.2011 Ohjaaja: DI Simo Heliövaara Valvoja: Prof. Harri Ehtamo Väkijoukon toiminta evakuointitilanteessa Uhkaavan tilanteen huomanneen
Informaation leviäminen väkijoukossa matemaattinen mallinnus Tony Nysten 11.4.2011 Ohjaaja: DI Simo Heliövaara Valvoja: Prof. Harri Ehtamo Väkijoukon toiminta evakuointitilanteessa Uhkaavan tilanteen huomanneen
Aihioiden priorisointi ja portfolioanalyysi ennakoinnissa (valmiin työn esittely)
") Aihioiden priorisointi ja portfolioanalyysi ennakoinnissa (valmiin työn esittely) Juha Kännö 23..22 Ohjaajat: TkL Antti Punkka, DI Eeva Vilkkumaa Valvoja: Prof. Ahti Salo Työn saa tallentaa ja julkistaa
Aihioiden priorisointi ja portfolioanalyysi ennakoinnissa (valmiin työn esittely) Juha Kännö 23..22 Ohjaajat: TkL Antti Punkka, DI Eeva Vilkkumaa Valvoja: Prof. Ahti Salo Työn saa tallentaa ja julkistaa
Lisää pysähtymisaiheisia ongelmia
 Lisää pysähtymisaiheisia ongelmia Lause: Pysähtymättömyysongelma H missä H = { w111x w validi koodi, M w ei pysähdy syötteellä x } ei ole rekursiivisesti lueteltava. Todistus: Pysähtymisongelman komplementti
Lisää pysähtymisaiheisia ongelmia Lause: Pysähtymättömyysongelma H missä H = { w111x w validi koodi, M w ei pysähdy syötteellä x } ei ole rekursiivisesti lueteltava. Todistus: Pysähtymisongelman komplementti
Ilmaisia ohjelmia laserkeilausaineistojen käsittelyyn. Laserkeilaus- ja korkeusmalliseminaari 8.10.2010 Jakob Ventin, Aalto-yliopisto
 Ilmaisia ohjelmia laserkeilausaineistojen käsittelyyn Laserkeilaus- ja korkeusmalliseminaari 8.10.2010, Aalto-yliopisto Johdanto Aalto-yliopiston maanmittausosastolla tehdyn kesätyön tuloksia Tehtävä oli
Ilmaisia ohjelmia laserkeilausaineistojen käsittelyyn Laserkeilaus- ja korkeusmalliseminaari 8.10.2010, Aalto-yliopisto Johdanto Aalto-yliopiston maanmittausosastolla tehdyn kesätyön tuloksia Tehtävä oli
KJR-C1001: Statiikka L2 Luento : voiman momentti ja voimasysteemit
 KJR-C1001: Statiikka L2 Luento 21.2.2018: voiman momentti ja voimasysteemit Apulaisprofessori Konetekniikan laitos Luennon osaamistavoitteet Tämän päiväisen luennon jälkeen opiskelija Pystyy muodostamaan,
KJR-C1001: Statiikka L2 Luento 21.2.2018: voiman momentti ja voimasysteemit Apulaisprofessori Konetekniikan laitos Luennon osaamistavoitteet Tämän päiväisen luennon jälkeen opiskelija Pystyy muodostamaan,
Monte Carlo -menetelmä optioiden hinnoittelussa (valmiin työn esittely)
") Monte Carlo -menetelmä optioiden hinnoittelussa (valmiin työn esittely) 17.09.2015 Ohjaaja: TkT Eeva Vilkkumaa Valvoja: Prof. Harri Ehtamo Työn saa tallentaa ja julkistaa Aalto-yliopiston avoimilla verkkosivuilla.
Monte Carlo -menetelmä optioiden hinnoittelussa (valmiin työn esittely) 17.09.2015 Ohjaaja: TkT Eeva Vilkkumaa Valvoja: Prof. Harri Ehtamo Työn saa tallentaa ja julkistaa Aalto-yliopiston avoimilla verkkosivuilla.
TIES483 Epälineaarinen optimointi
 TIES483 Epälineaarinen optimointi Käytännön optimointiongelmien ratkaiseminen jussi.hakanen@jyu.fi Syksy 2012 Käytännön optimointiongelmien ratkaiseminen Käytännössä tulee kiinnittää huomiota ainakin seuraaviin
TIES483 Epälineaarinen optimointi Käytännön optimointiongelmien ratkaiseminen jussi.hakanen@jyu.fi Syksy 2012 Käytännön optimointiongelmien ratkaiseminen Käytännössä tulee kiinnittää huomiota ainakin seuraaviin
Yhden muuttujan funktion minimointi
 Yhden muuttujan funktion minimointi Aloitetaan yhden muuttujan tapauksesta Tarpeellinen myös useamman muuttujan tapauksessa Tehtävä on muotoa min kun f(x) x S R 1 Sallittu alue on muotoa S = [a, b] tai
Yhden muuttujan funktion minimointi Aloitetaan yhden muuttujan tapauksesta Tarpeellinen myös useamman muuttujan tapauksessa Tehtävä on muotoa min kun f(x) x S R 1 Sallittu alue on muotoa S = [a, b] tai
Algoritmit 1. Luento 10 Ke Timo Männikkö
 Algoritmit 1 Luento 10 Ke 14.2.2018 Timo Männikkö Luento 10 Algoritminen ongelmanratkaisu Suunnittelumenetelmät Raaka voima Järjestäminen eli lajittelu Kuplalajittelu Lisäyslajittelu Valintalajittelu Permutaatiot
Algoritmit 1 Luento 10 Ke 14.2.2018 Timo Männikkö Luento 10 Algoritminen ongelmanratkaisu Suunnittelumenetelmät Raaka voima Järjestäminen eli lajittelu Kuplalajittelu Lisäyslajittelu Valintalajittelu Permutaatiot
Sekalukuoptimointi. Lehtonen, Matti Matemaattisen ohjelmoinnin seminaari, Tietojenkäsittelytieteen laitos Helsingin Yliopisto
 Sekalukuoptimointi Lehtonen, Matti Matemaattisen ohjelmoinnin seminaari, 2000-10-11 Tietojenkäsittelytieteen laitos Helsingin Yliopisto 1 Tiivistelmä Seminaarin aihe käsittelee globaalin optimoinnin erästä
Sekalukuoptimointi Lehtonen, Matti Matemaattisen ohjelmoinnin seminaari, 2000-10-11 Tietojenkäsittelytieteen laitos Helsingin Yliopisto 1 Tiivistelmä Seminaarin aihe käsittelee globaalin optimoinnin erästä
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 1: Moniulotteiset integraalit
 MS-A35 ifferentiaali- ja integraalilaskenta 3 Luento 1: Moniulotteiset integraalit Antti Rasila Aalto-yliopisto Syksy 215 Antti Rasila (Aalto-yliopisto) MS-A35 Syksy 215 1 / 24 Skalaarikenttä Olkoon R
MS-A35 ifferentiaali- ja integraalilaskenta 3 Luento 1: Moniulotteiset integraalit Antti Rasila Aalto-yliopisto Syksy 215 Antti Rasila (Aalto-yliopisto) MS-A35 Syksy 215 1 / 24 Skalaarikenttä Olkoon R
y=-3x+2 y=2x-3 y=3x+2 x = = 6
 MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
Röntgentomografia. Tommi Markkanen LuK-seminaari Matemaattis-luonnontieteellinen tiedekunta
 Röntgentomografia Tommi Markkanen LuK-seminaari Matemaattis-luonnontieteellinen tiedekunta Mitä on tomografia? Leikekuvantamista Sovellettavia ilmiöitä Röntgensäteily Raakadatana läpivalaisukuvat eri Positroniemissio
Röntgentomografia Tommi Markkanen LuK-seminaari Matemaattis-luonnontieteellinen tiedekunta Mitä on tomografia? Leikekuvantamista Sovellettavia ilmiöitä Röntgensäteily Raakadatana läpivalaisukuvat eri Positroniemissio
Mikroskooppisten kohteiden
 Mikroskooppisten kohteiden lämpötilamittaukset itt t Maksim Shpak Planckin laki I BB ( λ T ) = 2hc λ, 5 2 1 hc λ e λkt 11 I ( λ, T ) = ε ( λ, T ) I ( λ T ) m BB, 0 < ε
Mikroskooppisten kohteiden lämpötilamittaukset itt t Maksim Shpak Planckin laki I BB ( λ T ) = 2hc λ, 5 2 1 hc λ e λkt 11 I ( λ, T ) = ε ( λ, T ) I ( λ T ) m BB, 0 < ε
Luentorunko keskiviikolle Hierarkkinen ryvästäminen
 Luentorunko keskiviikolle 3.12.2008 Hierarkkinen ryvästäminen Ryvästyshierarkia & dendrogrammi Hierarkkinen ryvästäminen tuottaa yhden ryvästyksen sijasta sarjan ryvästyksiä Tulos voidaan visualisoida
Luentorunko keskiviikolle 3.12.2008 Hierarkkinen ryvästäminen Ryvästyshierarkia & dendrogrammi Hierarkkinen ryvästäminen tuottaa yhden ryvästyksen sijasta sarjan ryvästyksiä Tulos voidaan visualisoida
Tuntematon järjestelmä. Adaptiivinen suodatin
 1 1 Vastaa lyhyesti seuraaviin a) Miksi signaaleja ylinäytteistetään AD- ja DA-muunnosten yhteydessä? b) Esittele lohkokaaviona adaptiiviseen suodatukseen perustuva tuntemattoman järjestelmän mallinnus.
1 1 Vastaa lyhyesti seuraaviin a) Miksi signaaleja ylinäytteistetään AD- ja DA-muunnosten yhteydessä? b) Esittele lohkokaaviona adaptiiviseen suodatukseen perustuva tuntemattoman järjestelmän mallinnus.
Mat Optimointiopin seminaari kevät Monitavoiteoptimointi. Tavoitteet
 Mat-2.142 Optimointiopin seminaari kevät 2000 Monitavoiteoptimointi Optimointiopin seminaari - Kevät 2000 / 1 Tavoitteet Monitavoitteisten optimointitehtävien ratkaisukäsitteet ja soveltamismahdollisuudet
Mat-2.142 Optimointiopin seminaari kevät 2000 Monitavoiteoptimointi Optimointiopin seminaari - Kevät 2000 / 1 Tavoitteet Monitavoitteisten optimointitehtävien ratkaisukäsitteet ja soveltamismahdollisuudet
MAA5 Vektori, Opintokortti
 MAA5 Vektori, Opintokortti Nimi: Minimivaatimukset kurssin suorittamiseksi: Vihkoon on laskettu laadukkaasti vähintään 50 tehtävää. Opiskelija palauttaa viimeistään kokeeseen o Opintokortin täytettynä
MAA5 Vektori, Opintokortti Nimi: Minimivaatimukset kurssin suorittamiseksi: Vihkoon on laskettu laadukkaasti vähintään 50 tehtävää. Opiskelija palauttaa viimeistään kokeeseen o Opintokortin täytettynä
Paretoratkaisujen visualisointi. Optimointiopin seminaari / Kevät 2000 Esitelmä 11 Petteri Kekäläinen 45305L
 Paretoratkaisujen visualisointi Optimointiopin seminaari / Kevät 2000 Esitelmä 11 Petteri Kekäläinen 45305L 1. Johdanto Monitavoiteoptimointitehtävät ovat usein laajuutensa takia vaikeasti hahmotettavia
Paretoratkaisujen visualisointi Optimointiopin seminaari / Kevät 2000 Esitelmä 11 Petteri Kekäläinen 45305L 1. Johdanto Monitavoiteoptimointitehtävät ovat usein laajuutensa takia vaikeasti hahmotettavia
Ohjelmoinnin peruskurssi Y1
 Ohjelmoinnin peruskurssi Y1 CSE-A1111 30.9.2015 CSE-A1111 Ohjelmoinnin peruskurssi Y1 30.9.2015 1 / 27 Mahdollisuus antaa luentopalautetta Goblinissa vasemmassa reunassa olevassa valikossa on valinta Luentopalaute.
Ohjelmoinnin peruskurssi Y1 CSE-A1111 30.9.2015 CSE-A1111 Ohjelmoinnin peruskurssi Y1 30.9.2015 1 / 27 Mahdollisuus antaa luentopalautetta Goblinissa vasemmassa reunassa olevassa valikossa on valinta Luentopalaute.
Luentorunko perjantaille
 Luentorunko perjantaille 28.11.28 Eräitä ryvästyksen keskeisiä käsitteitä kustannusfunktio sisäinen vaihtelu edustajavektori etäisyysmitta/funktio Osittamiseen perustuva ryvästys (yleisesti) K:n keskiarvon
Luentorunko perjantaille 28.11.28 Eräitä ryvästyksen keskeisiä käsitteitä kustannusfunktio sisäinen vaihtelu edustajavektori etäisyysmitta/funktio Osittamiseen perustuva ryvästys (yleisesti) K:n keskiarvon
Miksi kompromissi on parempi kuin optimi? Uusia monitavoiteoptimoinnin menetelmiä päätöksentekoon
 Miksi kompromissi on parempi kuin optimi? Uusia monitavoiteoptimoinnin menetelmiä päätöksentekoon Kaisa Miettinen Johdantoa optimointiin Optimointi tarkoittaa systemaattisia tapoja taata parhaan mahdollisen
Miksi kompromissi on parempi kuin optimi? Uusia monitavoiteoptimoinnin menetelmiä päätöksentekoon Kaisa Miettinen Johdantoa optimointiin Optimointi tarkoittaa systemaattisia tapoja taata parhaan mahdollisen
TIIVISTELMÄRAPORTTI. Online-oppiva ilmavalvontajärjestelmän suorituskykymalli
 2016/2500M-0056 ISSN 1797-3457 (verkkojulkaisu) ISBN (PDF) 978-951-25-2852-3 TIIVISTELMÄRAPORTTI Online-oppiva ilmavalvontajärjestelmän suorituskykymalli Ari Visa, Juha Jylhä, Marja Ruotsalainen, Riitta
2016/2500M-0056 ISSN 1797-3457 (verkkojulkaisu) ISBN (PDF) 978-951-25-2852-3 TIIVISTELMÄRAPORTTI Online-oppiva ilmavalvontajärjestelmän suorituskykymalli Ari Visa, Juha Jylhä, Marja Ruotsalainen, Riitta
Käyttämällä annettua kokoonpuristuvuuden määritelmää V V. = κv P P = P 0 = P. (b) Lämpölaajenemisesta johtuva säiliön tilavuuden muutos on
 Lämpölaajenemisesta johtuva säiliön tilavuuden muutos on") 766328A ermofysiikka Harjoitus no. 3, ratkaisut (syyslukukausi 201) 1. (a) ilavuus V (, P ) riippuu lämpötilasta ja paineesta P. Sen differentiaali on ( ) ( ) V V dv (, P ) dp + d. P Käyttämällä annettua
766328A ermofysiikka Harjoitus no. 3, ratkaisut (syyslukukausi 201) 1. (a) ilavuus V (, P ) riippuu lämpötilasta ja paineesta P. Sen differentiaali on ( ) ( ) V V dv (, P ) dp + d. P Käyttämällä annettua
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Parametrisoidut käyrät ja kaarenpituus
 Luento 1: Parametrisoidut käyrät ja kaarenpituus") MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Parametrisoidut käyrät ja kaarenpituus Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0202 Syksy 2015 1 / 18
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Parametrisoidut käyrät ja kaarenpituus Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0202 Syksy 2015 1 / 18
Uolevin reitti. Kuvaus. Syöte (stdin) Tuloste (stdout) Esimerkki 1. Esimerkki 2
 Tuloste (stdout) Esimerkki 1. Esimerkki 2") Uolevin reitti Kuvaus Uolevi on ruudukon vasemmassa ylänurkassa ja haluaisi päästä oikeaan alanurkkaan. Uolevi voi liikkua joka askeleella ruudun verran vasemmalle, oikealle, ylöspäin tai alaspäin. Lisäksi
Uolevin reitti Kuvaus Uolevi on ruudukon vasemmassa ylänurkassa ja haluaisi päästä oikeaan alanurkkaan. Uolevi voi liikkua joka askeleella ruudun verran vasemmalle, oikealle, ylöspäin tai alaspäin. Lisäksi