PIENOISMALLI MCPHERSON- PYÖRÄNTUENNASTA
|
|
|
- Julia Mikkonen
- 9 vuotta sitten
- Katselukertoja:
Transkriptio
1 Opinnäytetyö AMK Auto- ja kuljetustekniikka Käyttöpainotteinen auto- ja kuljetustekniikka 2012 Vesa Lahti PIENOISMALLI MCPHERSON- PYÖRÄNTUENNASTA

2 OPINNÄYTETYÖ (AMK) TIIVISTELMÄ TURUN AMMATTIKORKEAKOULU Auto- ja kuljetustekniikka Käyttöpainotteinen auto- ja kuljetustekniikka Opinnäytetyön valmistumisajankohta 4/2012 Sivumäärä 46 Markku Ikonen Vesa Lahti PIENOISMALLI MCPHERSON- PYÖRÄNTUENNASTA Tämän opinnäytetyön tarkoituksena oli rakentaa opetusmateriaalia Turun ammattikorkeakoulun auto- ja kuljetustekniikan koulutusohjelmalle. Opinnäytetyön tavoitteena oli luoda pienoismalli henkilöauton etupyörän ripustuksesta. Työhön valittiin käytännönläheisyyssyistä käytössä oleva pyöräntuentaratkaisu, McPherson-tyyppinen joustintuki. Pienoismalli vaati suunnittelun sekä valmistuksen. Koska työ oli laaja, suoritettiin se kahden opiskelijan voimin. Suunnittelun lähtökohtana oli luoda pienoismalli, jonka avulla voisi havainnollistaa ohjaavien pyörien asentokulmia sekä niiden muutoksia. Valmistamisessa taas pääpaino oli helpossa käytettävyydessä ja mahdollisimman korkeassa hyötysuhteessa. Suunnittelun perustana toimivat varsinainen ymmärrys pyörän kulmien muutoksista sekä perusgeometrinen laskenta. Valmistuksen peruspilarina toimivat työn esikuva McPhersonpyöräntuenta sekä käsityötaidot. Työ osoittautui haastavaksi. Suunnittelun osalta laskenta sekä mitoitus olivat useasti mietinnän alla ja valmistuksessa pienet suunnittelussa jääneet virheet tulivat nopeasti esille. Osa suunnittelussa tapahtuneista lipsahduksista pystyttiin myöhemmin korjaamaan, mutta vasta käytännön kokemus osoittaa pienoismallin mahdolliset jatkokehitystarpeet. ASIASANAT: pyöränkulmat, camber, caster, KPI, Auraus- ja harituskulmat, McPherson pyöräntuenta.

3 BACHELOR S THESIS ABSTRACT TURKU UNIVERSITY OF APPLIED SCIENCES Automotive and Transportation Engineering Practically Oriented Completion year of the thesis 4/2012 Total number of pages 45 Instructor Markku Ikonen Vesa Lahti SCALE MODEL OF MCPHERSON STRUT The purpose of this study was to construct a physical training material for the degree programme of automotive and transportation engineering at Turku University of Applied Science. The aim was to create a scale model for the wheel alignment of the car. The suspension solution was a McPherson type strut for practical reasons. The scale model required designing and manufacturing of the car s wheel alignment. Because this posed a great amount of work, it was carried out by two students. The starting point of designing was to create a clear demonstration of the car s steering axle geometry and wheel alignment. The focus in the manufacturing was on the ease of use and good cost/benefit ratio. The basis for designing was a basic understanding of wheel angles and their changes during turning, and basic geometric calculation. The manufacturing relied on its role model, the McPherson strut, and handicraft skills. Conducting the work was very challenging. When planning calculation and design were frequently under consideration. Small errors in designing became blatantly obvious in the manufacturing phase. Some of the errors were corrected but it is only practical experience that will reveal further development needs of the scale model. KEYWORDS: wheel alignment, camber, caster, KPI, toe in and toe out angles, McPherson strut.

4 SISÄLTÖ 1 JOHDANTO Työn tavoite ja tausta Tilaaja 7 2 PYÖRÄNTUENTA TEORIA Perusteoria Ackermann-ehto Kaartoharitus Camber-kulma Caster KPI McPherson-pyöräntuenta 16 3 PIENOISMALLIN SUUNNITTELU JA VALMISTUS Pyörän napa & pyörä Camber- ja caster-säätölevy Ohjausmekanismi Pöytälevy Asteikot 30 4 PIENOSMALLIN KÄYTTÖ Camber-kulma Auraus- ja harituskulma Ohjaus Ackermann-ehto & kaartoharitus Pöytälevy 35 5 YHTEENVETO 36 LÄHTEET 37 LIITTEET 1

5 LIITTEET Liite 1. Räjäytyskuvat ja komponenttiluettelo. KUVAT Kuva 1. Akseliohjaus 9 Kuva 2. Ackermann-ehto (Gillespie 1992) 10 Kuva 3. Kaartoharitus (Gscheidle 2009) 11 Kuva 4. Camber-kulma (Gscheidle 2009) 12 Kuva 5. Auraus- ja harituskulma (Gscheidle 2009) 13 Kuva 6. Caster-kulma (Gscheidle 2009) 14 Kuva 7. KPI-kulma (Gscheidle 2009) 15 Kuva 8. McPherson -tuenta (Autodata 2012) 17 Kuva 9. KPI-kulman laskenta 21 Kuva 10. Caster-kulman laskenta 24 Kuva 11. Ohjauksen toiminta 26 Kuva 12. Kääntövarren kulkema matka 90 asteen kääntyvyydessä 29 Kuva 13. Camber säätölevy 32 Kuva 14. Pyöränkääntyvyys asteikko 33 Kuva 15. Ohjausmekanismi 35 TAULUKOT Taulukko 1. Mittasuhdetaulukko 19

6 6 1 JOHDANTO 1.1 Työn tavoite ja tausta Opinnäytetyön tavoitteena oli tehdä opetusmateriaalia Turun ammattikorkeakoulun auto- ja kuljetustekniikan koulutusohjelmalle. Työn tarkoitus oli selventää auton ohjausakseliston ympärillä olevaa geometriaa. Toisin sanoen työn tavoitteena oli luoda käytössä olevasta auton etuakselista pienoismalli, jolla voitaisiin havainnollistaa pyöränkulmien olemassa oloa sekä pienissä määrin kääntymisessä tapahtuvia kulmamuutoksia. Pienoismallin esikuvaksi valittiin käytännönläheisyys syistä McPherson tuentaratkaisu, koska kyseinen tuenta on laajalti käytössä. McPherson-tuenta on käytännön läheisyydellä katsottuna yleisin pyöräntuentaratkaisu. Opinnäytetyön laajuudesta johtuen työ suoritettiin kahden opiskelijan voimin. Toinen opinnäytetyöntekijä on Jussi Naatula, jonka opinnäytetyö on McPherson-pyöräntuennan pienoismalli Tässä osassa käsitellään pyöränkulmista ja ohjausgeometriasta camber-, auraus- ja harituskulmia, kaartoharitusta ja Ackermann-ehtoa. Jussi naatulan opinäytetyössä käsitellään KPI-, caster-kulmat sekä kääntövierinsäde ja kääntökeskiö. Käytännön osuudessa käsitellään pienoismallin, ohjauksen ja pyörän navan suunnittelua ja valmistusta. Opinnäytetyö jakautuu kolmeen osaan. Ensimmäisessä osassa kuvaillaan perusteoriaa, jossa käsitellään auton etuakselilla olevia pyöränkulmia ja ohjaustapahtumia pintapuoleisesti, sekä varsinaisen pienoismallin esikuvana toimivan pyöräntuentaratkaisun olemassaoloa. Toisessa osassa kerrotaan suunnittelusta ja valmistamisprosessista. Tämä asia käsitellään hyvin yksityiskohtaisesti. Kolmannessa osassa kerrotaan varsinaisen välineen käytöstä sekä mainitaan huomioita edellä mainittujen kulmien ja ohjaustapahtumien osalta.

7 7 1.2 Tilaaja Työn tilaajana toimi Turun ammattikorkeakoulun tekniikka, ympäristö ja taloustulosalueen auto- ja kuljetustekniikan koulutusohjelma. Turun ammattikorkeakoulu on noin 9500 opiskelijan ja 700 asiantuntijan monialainen koulutusyhteisö. Turun ammattikorkeakoulu tarjoaa työelämään ja yrittäjyyteen kehittävää koulutusta, tutkimus- ja kehitystyötä sekä organisaatioiden kokonaisvaltaista kehittämistä. Turun ammattikorkeakoulun toiminnan kolme päätehtävää ovat nuorisolle suunnattu korkeakoulutasoinen ammattiopetus, aikuiskoulutus- sekä tutkimus- ja kehitystoiminta. (Turun ammattikorkeakoulu 2012a.) Vaikutusalueena Turun ammattikorkeakoululla on Varsinais-Suomi. Pääosa opiskelijoista tulee Varsinais-Suomesta, ja myös suurin osa valmistuneista työllistyy maakuntaan. Turun ammattikorkeakoululta valmistuu vuosittain noin 1500 ammattilaista. Turun ammattikorkeakoulu kehittää maakuntaa tukevaa monialaista innovaatiopedagogiikkaa, jossa korostuvat tutkimus- ja kehitystoiminta, joustavat opetussuunnitelmat, yrittäjyys- ja palvelutoiminta sekä kansainvälisyys. (Turun ammattikorkeakoulu 2012b.) Auto- ja kuljetustekniikan koulutusohjelman tavoitteena on perehdyttää opiskelijat auton rakenteeseen, toimintaan, käyttöön ja suunnitteluun sekä autokaluston kunnossapitotehtäviin. Koulutusohjelmassa on kolme suuntautumisvaihtoehtoa: autotekniikka, käyttöpainotteinen auto- ja kuljetustekniikka sekä kuljetustekniikka. Kaikessa opetuksessa pidetään sekä talous- että ympäristönäkökulmia vahvasti esillä. Auto- ja kuljetustekniikan koulutusohjelmasta valmistuu vuosittain noin 50 insinööriä auto- ja kuljetusalan asiantuntijatehtäviin. (Turun ammattikorkeakoulu 2012c.)

8 8 2 PYÖRÄNTUENTA TEORIA 2.1 Perusteoria Ajoneuvon käyttötarkoituksena on kuljettaa jotain paikasta A paikaan B. Koska kyseinen välimatka harvoin on täysin suora tai tasainen, on ajoneuvoon suunnitteluvaiheessa suunniteltava ohjausjärjestelmä. Ajoneuvon käyttöolosuhteet huomioon ottaen on ohjausgeometria sekä rakennevaatimukset otettava huomioon. Tässä työssä keskitytään ajoneuvon ohjausgeometriaan. Ohjausgeometria käsittää suuren määrän asioita, joista osaa tässä työssä peruspiirteittäin käsitellään. Pyöräntuentageometria sisältää muun muassa pyörän asentokulmat, jotka ovat camber, caster, auraus/haritus ja KPI. Ohjausgeometriasta löytyy kääntösäde, kääntökeskiö, kaartoharitus ja Ackermann-ehto. Jokainen edellä mainittu asia vaikuttaa toinen toisiinsa. Toisin sanoen yhden kulman muuttaminen vaikuttaa oleellisesti koko järjestelmän toimintaan. Tässä työssä keskitytään camber-kulman, auraus- ja harituskulman, kaartoharituksen ja Ackermann-ehdon olemassaoloon. Tässä työssä pienemmälle huomille jäävät KPI, caster, kääntösäde ja kääntökeskiö, koska näitä käsitellään tarkemmin Jussi Naatulan opinnäytetyössä. Ohjausvivuston suunnittelussa on huomioitavaa mahdollisimman täydellinen tarkan ohjausgeometrian noudattaminen. Tarkalla ohjausgeometrialla tarkoitetaan, että pyörän akseleiden jatkeiden on kaikilla kääntökulmilla leikattava toisensa pisteessä, joka sijaitsee taka-akselin jatkeella Tämä toteutus onnistuu hyvin yksinkertaisella ohjausmekanismilla, ns. akseliohjauksella (kuva 1), mutta kyseinen ohjausmekanismi ei sovellu nelipyöräisen auton ohjaukseen kovinkaan hyvin. Kyseisessä ohjauksessa koko

9 9 ohjaava-akseli kääntyy. Merkittävimmät haitat kyseisessä ohjausjärjestelmässä ovat: Kääntäminen vaatii paljon tilaa, jos akselilla on 2 pyörää. Koko akselin kääntäminen on raskasta. Suurilla kääntökulmilla ajoneuvo voi kaatua Kuva 1. Akseliohjaus Kyseinen konstruktio on nelipyöräiseen ajoneuvoon hyvin vaikeasti toteutettava ratkaisu. (Laine 1979, 121.)

10 Ackermann-ehto Ackermann-ehto (kuva 2) on teoreettisesti ihanteellinen ohjausgeometria, mutta käytännössä saavuttamattomissa yksinkertaisella ohjausmekanismilla. Ackermann-ehdon mukaisesti ohjaavista etupyöristä piirretyt suorat akselit kohtaavat samassa pisteessä taka-akselilta piirretyllä akselilla. (Laine 1979, 122.) Ehdossa käännöksen sisempi pyörä kääntyy hieman ulompaa enemmän. Sisemmän ja ulomman pyörän kääntymiskulmien eroa kutsutaan nimellä kaartoharitus. Kuva 2. Ackermann-ehto (Gillespie 1992).
 Ehdossa käännöksen sisempi pyörä kääntyy hieman ulompaa enemmän.")
11 Kaartoharitus Kaartoharitus on käännöksessä sisemmän pyörän ylikääntymistä kuvaava kulma (kuva 3). Kaartoharitus on Ackermann-ehdon oleellisin asia. Jos kaartoharitusta ei olisi, ohjaus olisi ns. tasapyöräohjaus. Jos kaartoharitus tapahtuisi kaarteen ulommalla pyörällä, kyseessä olisi Ackermann-ehdon anti versio ns. anti-ackermann. Tasapyöräohjauksessa renkaat taistelevat kaartosäteen suuruudesta jolloin, kasvavat sivuttaisvoimat ja vierintävastus, sekä renkaan kuluminen lisääntyy. (Laine 1979, 109.) Kuva 3. Kaartoharitus (Gscheidle 2009).

12 Camber-kulma Camber-kulmalla tarkoitetaan pyöränkallistumaa (kuva 4). Camber-kulma voi olla joko negatiivinen, positiivinen tai nolla. Camber-kulman alkuperäinen tarkoitus on ollut estää hevosvankkureissa pyörän irtoaminen kiinnitysmutterin löystyessä. Nykyisin camber-kulmalla haetaan aivan erilaisia tavoitteita. Tavoitteina autokäytössä camberin valinnalla pyritään optimoimaan käyttötarkoitukseen sopivat renkaan tuottamat sivuvoimat ja siitä syntyvät edulliset ajo-ominaisuudet käyttötarkoitukseen kohdistaen. (Laine 1979, 102.) Camber-kulma vaikuttaa myös kääntövierinsäteeseen. Pyörän kääntövierinsäteellä tarkoitetaan pyörän pystykallistuman ja kääntöakselin nollakohtien välistä mittaa. (Laine 1979, 102.) Kuva 4. Camber-kulma (Gscheidle 2009). Esimerkkejä positiivisen camberin käyttötarkoituksista. - Kaarevalla tiellä pyörä asetetaan kohtisuoraan tienpintaan nähden, jolloin rengaskuluma pienenee. - Jousien kuoleentumisen aiheuttaman negatiivisen pyöränkallistuman kompensointi. - Positiivinen camber lyhentää pyörän kääntövierinsädettä.
 Camber-kulma vaikuttaa myös kääntövierinsäteeseen. Pyörän kääntövierinsäteellä tarkoitetaan pyörän pystykallistuman ja kääntöakselin nollakohtien välistä mittaa. (Laine 1979, 102.")
13 13 Negatiivisen camber-kulman suosiminen pienentää renkaan sortokulmia, mikä parantaa auton ohjautuvuusominaisuuksia. Liiallinen camber-kulma taas aiheuttaa renkaan toispuoleista kulumista. (Laine 1979, 102.) 2.5 Auraus ja haritus Auraus- ja harituskulmalla (kuva 5) tarkoitetaan pyörien pitkittäisvinoutta auton pituusakseliin nähden. Pyörissä on aurausta silloin kun, akselin kulkusuuntaan nähden pyörien etureunojen välinen mitta on takareunoja lyhyempi ja haritusta on takareunojen mitan ollessa etureunojen mittaa lyhyempi. Aurauksella tai harituksella saadaan aikaan ohjauksen palautuminen pienillä kulmilla ja samalla saadaan pienenettyä vierintävastuksen ja kääntövierinsäteen aiheuttamaa auraus- tai haritus-efektiä. Kuva 5. Auraus- ja harituskulma (Gscheidle 2009). Esimerkkejä aurauksen käyttötarkoituksista - Positiivisen camber-kulman aiheuttaman haritusvaikutuksen kompensointi. Tosin positiivinen camber ei aina vaikuta auraukseen tai haritukseen - Suuntavakauden parantamiseksi suoraan ajettaessa. - Vierintävastuksen haritusvaikutuksen kompensointi. Esimerkkejä harituksen käyttötarkoituksista. - Vierintävastuksen aurausvaikutuksen kompensointi. - Suuntavakauden parantamiseksi suoraan ajettaessa. - negatiivisen camberin aiheuttaman aurausvaikutuksen kompensointi. (Laine 1979, 105.)

14 Caster Caster on ohjaavan pyörän kääntöakselin eli olkatapin tai pallonivelten kautta kulkevan suoran kallistuma eteen-taakse-suunnassa (kuva 6). Jos yläosa kallistuu taaksepäin, on caster positiivinen. Caster on negatiivinen, jos kallistuma on ylhäältä eteenpäin. Takakallistuman eli casterin tarkoituksena on aikaansaada ohjaukseen pyörän palautusmomentti. Palautusmomentilla tarkoitetaan momenttia joka, oikaisee pyörät kulkusuuntaan, kun ratista ote heltiää. (Laine 1979, 114.) Varsinainen momenttivarsi luodaan pyöräntuennalla ja renkaan kimmoisuusominaisuuksia hyödyntämällä. Momenttivarsi muodostuu pyöräntuentaan tarkoitetun caster-kulmasta muodostamasta jättämästä sekä pyörän jättämästä. Näiden yhteistuloksena saadaan kokonaismomenttivarsi. (Laine 1979, 114.) Positiivisen takakallistuman ominaisuuksien etuna on, että se - Toimii rengascasterin kanssa palauttavana momenttivartena. - luo kuljettajan ja renkaan välille hyvän tietoväylän sivuttaisvoimien vaikutuksista. - Pienentää kaarteessa ulomman etupyörän sortoa. Positiivisen takakallistuman ominaisuuksien haittana on, että se - Liian suuri caster voi tuntua kuljettajan käsissä. - sivutuuli tai kalteva tie voi kääntää pyöriä jos ohjausjärjestelmässä on välystä tai muuta joustavuutta mahdollistavaa ominaisuutta. (Laine 1979, 114.) Kuva 6. Caster-kulma (Gscheidle 2009).
 Varsinainen momenttivarsi luodaan pyöräntuennalla ja renkaan kimmoisuusominaisuuksia hyödyntämällä.")
15 KPI KPI-kulma (kuva 7) on kulma, jonka olkatappi tai pallonivelten kautta kulkeva suora eli pyörän kääntöakseli muodostaa auton pituussuuntauseen pystytasoon nähden. KPI on kääntöakselin sivukallistuma, Koska se on sivukallistuma se myös omaa eräitä hyviä pyörän sivukallistuman ominaisuuksia. KPI:n vaikutuksesta pyörän kääntövierinsäde lyhenee. KPI toimii ohjauksen palauttavan momentin luojana varsinkin keskisuurilla kääntökulmilla. KPI toimii casterin kanssa yhteistyössä. Kun ajoneuvo kaartuu, KPI pienentää ulomman pyörän kääntöakselin takakallistumaa eli casteria ja lisää sisemmän pyörän takakallistumaa. (Laine 1979, 113.) KPI:n hyviä ominaisuuksia - Lyhentää pyörän kääntövierinsädettä ja heikentää tiestä kohdistuvien iskujen vaikutuksia. - Mahdollistaa pyörän pystyssä olemisen jolloin pyörän toispuoleinen kuluminen vähenee. - palauttaa ohjauksen keskisuurilla kääntökulmilla. Liian suuren KPI-kulman haittana on mahdollisuus vaikeuttaa ohjauksen palautumista suurilla kääntökulmilla johtuen takakallistuman pienentämisestä. (Laine 1979, 113.) Kuva 7. KPI-kulma (Gscheidle 2009).

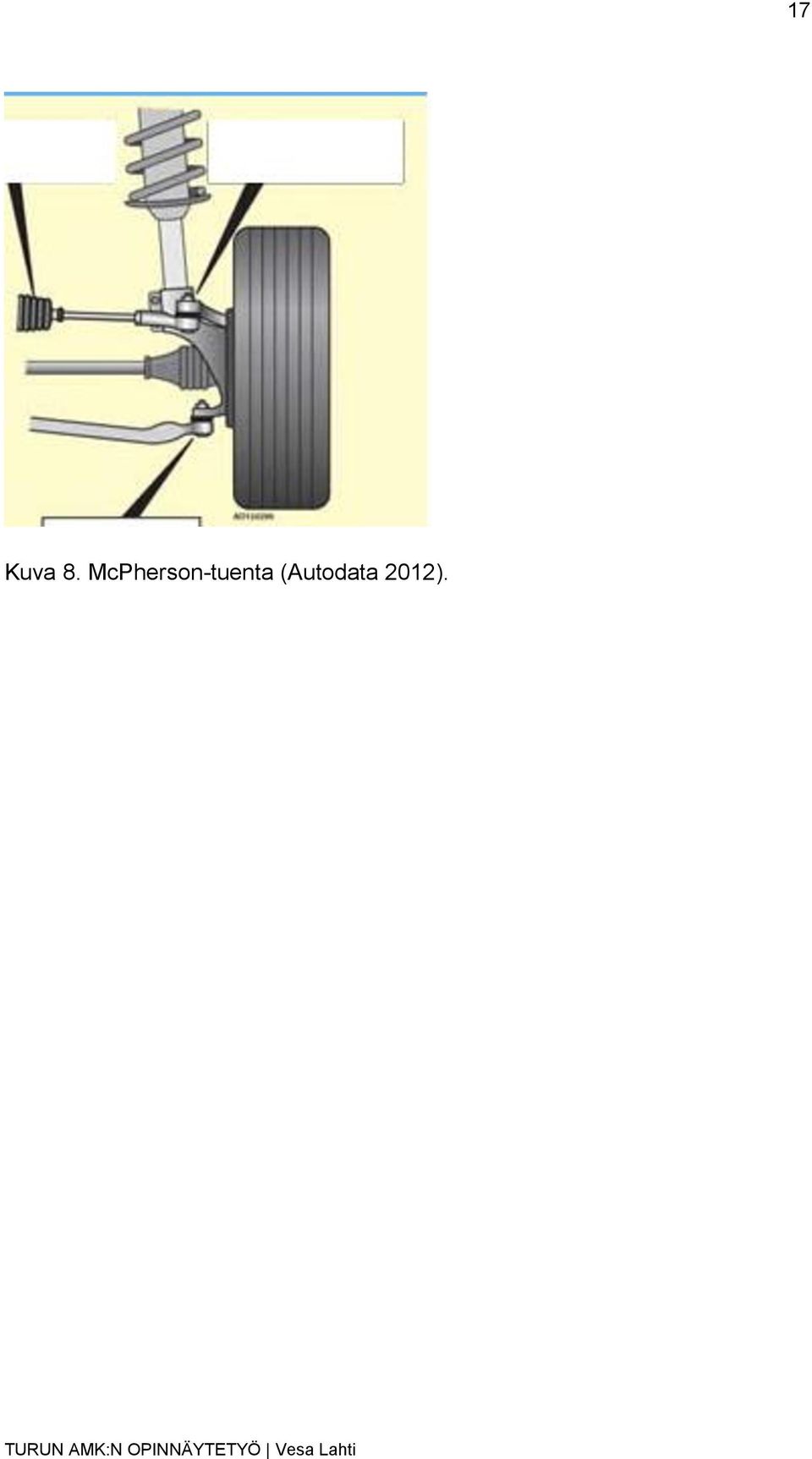
16 McPherson-pyöräntuenta Pyöräntuennalla tarkoitetaan varsinaisia komponentteja, joilla pyörät tai akselistot kiinnittyvät auton koriin tai runkoon. Pyöräntuennan tehtävänä on tukea ja ohjata pyörien ja korin keskinäistä asentoa joustoliikkeissä, kiihdytys-, jarrutus- ja sivuttaisvoimia vastaan. Ohjausvaatimuksesta johtuen ohjautuvan ja ei ohjautuvan pyöräntuennassa on suuri ero. (Laine 1981, 220.) McPherson-pyöräntuennan kehitti Fordin ja myöhemmin General Motorsin palveluksessa toiminut Earl S. McPhearson (Laine 1981, 239). Varsinaisia osaalueita löytyy yhteensä 3, jotka ovat joustintuki, pyörän napa ja alatukivarsisto. Joustintuki koostuu iskunvaimentimesta, jousesta sekä joustintuen yläpäästä. Joustintuki on kiinnitetty yläpäästään auton koriin ja alapäästään pyörän napaan. Iskunvaimentimena on yleensä neste eli öljyvaimennin. Tosin on sanottava, että yhä useammin on havaittavissa iskunvaimentimien lisääntyvän kaasukäyttöisenä. Jousi on yleensä kierrejousi. Mahdollisuus on myös hydropneumaattiseen jousija iskunvaimenninratkaisuun, joka voidaan suunnitella toimimaan kuten halutaan. Ainut erityinen asia, joka on otettava huomioon jousen suunnittelussa on, kiertyminen. Jousi voi olla millainen kierrejousi tahansa kunhan, se sopii joustintukeen eikä rajoita kiertymistä. Joustintuen yläpää on toiminnan kannalta erittäin kriittinen kohta. Yläpään on oltava tarpeeksi kestävä ottamaan vastaan auton joustoliikkeitä ja samalla kyettävä pitämään joustintuki kiinni autossa. Joustintuen yläpään keskellä on laakerointi jonka, toiminta on kriittinen pyöränkääntymisen kannalta. Laakeroinnin on toimittava virheettömästi ja, jos laakeri alkaa vioittua on kääntyminen raskaampaa. Tämän voi huomata rattituntumassa. Alatukivarsisto on kiinnitetty sisäpäästään auton runkoon ja ulkopäästään pallonivelellä pyörän napaan. Alatukivarsiston tarkoituksen on sallia pieni ylösja alaspäin suuntautuva edestakainen liikehdintä. Pyörän napa on kiinnityspiste, joka kiinnittää pyörän ja jousijalan sekä alatukivarsiston yhtenäiseksi paketiksi.
 McPherson-pyöräntuennan kehitti Fordin ja myöhemmin General Motorsin palveluksessa toiminut Earl S. McPhearson (Laine 1981, 239).")
17 17 Kuva 8. McPherson-tuenta (Autodata 2012).
18 18 3 PIENOISMALLIN SUUNNITTELU JA VALMISTUS Työn tavoitteena oli suunnitella McPherson-pyöräntuentaan mukailema pienoismalli, jonka toimintaa kykenee säätelemään hyvinkin runsaasti. Tässä opinnäytetyössä keskitytään ohjauksen ja pyörän navan suunnitteluun, toimintaan sekä käytännössä rakentamiseen. Pienoismallin toiveina oli tilaajan puolesta, helppo käytettävyys, sopiva koko sekä mahdollisimman suuri aitous. Helpolla käytettävyydellä tarkoitettiin työkalujen tarpeen minimointia käytön aikana. Sopivalla koolla tarkoitettiin, että malli olisi helppo kantaa ja olisi suurin piirtein pulpetin levyinen. Mahdollisimman suurella aitoudella tarkoitettiin yhdenmukaisuutta käytössä olevien autojen etuakseliin. Otimme toiveet huomioon ja valitsimme 1:3 mittasuhteen, joka on sopivin kyseiseen pienoismalliin. Tosin kaikki komponentit eivät tätä mittasuhdetta noudata, koska hinta/laatusuhde pyrittiin pitämään mahdollisimman korkeana ja kaikkien pyöränkulmien muutosmahdollisuuteen ei 1:3 mittasuhde ollut käytännöllinen. Kun mittasuhde oli valittu, oli helppo laskea raideväli kyseiselle mallille. Normaalissa henkilöautossa raideväli on noin 1500 mm, joten mittasuhdetta mukaillen mallin raideväli tuli olemaan 500 mm. Alkuperäinen arvo/mittasuhde = Uusi arvo 1500 mm/3=500 mm Mittasimme Turun ammattikorkeakoulun Toyota Priuksen etuakselilta ohjeellisia mittoja tukivarsista, jousijaloista, olkavarsista ja pyörän navoista. Mitattuamme laskimme komponenttien mittasuhde-arvot. Arvoja pyöristettiin käytännöllisyyssyistä suuntaan tai toiseen.

19 19 Taulukko 1. Mittasuhdetaulukko Mittasuhde taulukko Tavoite suhde Malli Lopullinen suhde Toyota Alatukivarsi 350 mm 1/3 200 mm 1,75 Pyörän napa 200 mm 1/3 70 mm 2, Jousijalka 550 mm 1/3 200 mm 2,75 Pyörä 610 mm 1/3 203,2 mm 3, Olkavarsi 150 mm 1/3 50 mm 3 Komponenttien mittojen pyöristykseen vaikutti pyöränkulmien säätöä varten jätetty pelivara. Esivalittujen arvojen ansiosta pystyimme laskemaan pyöränkulmien säätömahdollisuuden. 3.1 Pyörän napa & pyörä Pyörän navan tavoitteena on pitää varsinainen pyörä sekä ohjausmekanismi yhteydessä runkoon. Pyörän navan suunnittelun lähtökohtana oli mahdollisimman halpa, käytännöllinen ja kestävä ratkaisu. Näihin haasteisiin löysimme ratkaisun Turun ammattikorkeakoulun metallin keräyksestä. Ensimmäisenä pyörän navan suunnittelussa oli otettava huomioon pyörän navan koko. Navan oli oltava tarpeeksi jäykkä, jotta taipumisia tai murtumia ei tulisi käytön myötä liian helposti. Näitä lujuusopillisia asioita pohdin hetken, jonka jälkeen tulin tulokseen että, käytän vain omaa arviointikykyä enkä rupea laskemaan kyseisiä laskuja, koska käytännössä pienoismallin ei ole tarkoitus joutua suureen rasitukseen. Pyörän navan koon määritti jousijalan mitta, alatukivarren pallonivelen kiinnitys, korkeus, pyöränkulmien muutokset ja materiaalin helppo käsiteltävyys. Koska yhtenä toiveena oli mahdollistaa 90 asteen kääntyvyys pyörälle, oli pyörän navan muotoiluun huomioitava kyseinen asia sekä pyörän offsettiin kiinnitettävä erityistä huomiota.

20 20 Ennen varsinaista mitoitusta oli laskettava pyöränkulmien muutoksista aiheutuvat poikkeamat nolla-asennosta. Pyörän napaan vaikuttavia kulmia ovat KPI, caster, camber ja Auraus ja haritus. Kyseiset halutut kulmamuutokset oli laskettava ennen pyörän navan mitoitusta. Koska pienoismalli tulee opetusmateriaaliksi, oli pyöränkulmien oltava selkeästi näytettävissä. Tämä tarkoitti rajuja muutosmahdollisuuksia. Normaalissa henkilöautossa pyöränkulmat on esimäärätty ja niiden muuttamien on mahdollista vain pienissä määrissä. Nämä muutokset ovat yleensä McPhearson-pyöräntuennassa mahdollisia vain auraus- ja harituskulman muutoksen avulla. Pyörän navan alapään kiinnitys määräytyi alapallonivelen maksimaalisella kulma muutoksella eli alapallonivelen rakenteellisella kulmamuutossallivuudella. Tämä sallivuus myös pyrittiin saamaan KPI-kulman maksimaaliseksi muutokseksi. Kyseinen muutos laskettiin mittatuloksista. Mittaukset suoritettiin alapallonivel kiinnitettynä ruuvipenkkiin ja alapalloniveleen kiinnitettiin jatkomutterin avulla 100mm kierretanko, jolloin nolla-kohdassa ollut nivel horjautettiin rakenteellisesti maksimaaliseen sallivuuteensa. Koska tarkoituksena oli mitoittaa alapallonivelen maksimaalinen kulma, oli laskennallisesti helpoin käyttää perusgeometrisiä laskukaavoja. Piirsimme ja mittasimme paperille suorakulmaisen kolmion. Mittasimme kateettien mitat jolloin, saimme laskettua kyseisen kulman.

21 21 Kuva 9. KPI-kulman laskenta KPI-kulman maksimaalinen muutos Tämän kulman tiedettyäni kykenin suunnittelemaan pyörän navan alapään kiinnityksen leveyden. Navan alapään kiinnityksen tiedettyäni aloin suunnitella 90 asteen kääntyvyyttä sallivaa tilaa pyörän napaan. Ongelmaan oli onneksi helppo ratkaisu sillä, pienellä viisteellä, pyörän navan alareunaan, päästiin 90 asteen kääntyvyyteen. Pyörän navan korkeudeksi suunniteltiin 70 mm, koska runko on tämän korkuinen ja pyörä haluttiin esteettisyyssyistä rungon keskikorkeudelle. Navan leveydeksi valittiin 50 mm, koska metallipala, josta navan tein, oli tämän levyinen. Yläpään ja alapään kiinnityskohtien leveydeksi tuli 20 mm. Navan yläja alapäätä varten mitoitettiin reikien paikat, jotka merkattiin ennen poraamista. Ylä- ja alapäähän porattiin halkaisijaltaan 6 mm:n reiät joustintuen ja
22 22 alapallonivelen kiinnitystä varten. Navan keskelle tuli 8 mm halkaisijan omaava reikä, jonka läpi vietiin M8-pultti, pyörän kiinnitystä varten. Pyörä kiinnitettiin pyörän napaan M8*100 pultilla, jonka päähän tuli kupumutteri. Pyörän ja pyörän navan väliin tuli välikappale. Välikappaleeksi valittiin M10 mutteri, jolloin välikappaleen halkaisija on yli 8mm. Halkaisijalla ei ole niin suurta merkitystä, kunhan se on tarpeeksi iso pulttia varten. Välikappale luotiin 90 asteen kääntyvyyttä varten, koska pyörä olisi muuten ottanut kiinni kääntyessään alatukivarteen. Itse pyörä valittiin Biltemasta. Valinnan kohteeksi osui 8 lasten potkulaudan pyörä. Kyseisen pyörän hyötysuhde oli erinomainen, koska se oli valmiiksi suunniteltu raskaaseen kuormitukseen ja täten sisälsi tarvittavan lujuuden ja loistavan laakeroinnin tarpeeseen nähden. Pyörän navan toiselle sivulle luotiin kiinnityspinta olkavartta varten. Kiinnityspintaan oli porattava reikä, jotta läpivienti onnistuisi. Kyseisessä kiinnityspisteen vieressä on selvimmin havaittavissa oleva suunnittelussa tehty virhe. Porattua reikää oli siirrettävä vähän ylemmäs, jotta kääntövarsi ei ota kiinni alatukivarteen. Myös kiinnityspinnan alareunaa sekä pyörän navan alareunaa oli viistettävä, jotta 90 asteen kääntyvyys olisi mahdollinen. Viiste on noin 45 asteen kulmassa. Olkavarsi on M6-silmukkaruuvi, jonka kiinnitykseen on käytetty M6- mutteria sekä M6-siipimutteria. Pyörän navan yläpää kiinnittyy camber/caster -säätölevyyn. Tämä kiinnitys suoritetaan M6*40 pultilla joka puristetaan M6 nylock-mutterilla ensin kiinni pyörän napaan jonka jälkeen pulttia käytetään yläpallonivelenä. Nylock-mutteri valittiin laakeriominaisuutensa takia yläpäähän. Mutteri sallii oman akselinsa kiertymisen ilman aukeamista. (liite 1 sivu 7-9)
23 Camber- ja caster-säätölevy Kun suunnittelin säätölevyä, oli otettava huomioon pyörän offset. Kun camberia säädetään, antaa alapallonivel liikkumavaraa ja yläpää siirtyy sisäänpäin. Tästä syystä säätölevy ottaa kiinni vanteeseen jolloin siitä tulee rajoittava tekijä camber-kulman säädössä. caster-kulman säädössä alapallo olisi rajoittava tekijä, mutta pyörän offset rajoittaa levyn kokonaismittaa, jolloin siitä tulee caster-kulman rajoittava tekijä. Säätölevyn mitoiksi valittiin 50mm pitkä ja 40mm leveä. Näillä mitoilla kyettiin optimoimaan caster-kulman esiintyminen ja mahdollistettiin hyvä camberkulman näkyvyys. Camber- ja caster-kulman säätölevy tehtiin käytännöllisyyssyistä samaan nippuun. Itse säätölevy on varsin yksinkertainen. Levy on 50 mm pitkä ja 40 mm leveä. Levyn toiseen päähän noin 8 mm reunasta porattiin säätöön tarkoitettu reikä. Säätöreiän koko mitoitettiin mahdollisimman suureksi, jotta säädettävissä olevat kulmat ovat mahdollisimman suuret. Tällöin materiaalin taipuminen on säätöreiän rajoittava tekijä. Jätin säätölevyn molempiin päihin 5mm reunat sekä toiseen laitaan 5mm reunan. Tämä säätöreikä mahdollistaa caster-kulman säädon, joka laskennallisesti on 21,8 astetta positiiviseen ja negatiiviseen suuntaan eli kokonaissäätövara on 43,6 astetta. Laskemisen suoritin soveltamalla paperilla suorakulmaisen kolmion laskentatapaa.
24 24 Kuva 10. Caster-kulman laskenta Camber-kulman säätöön vaikuttaa edellä mainitusti pyörän offset, koska levy ottaa kiinni vanteeseen. Camberin laskenta suoritettiin samalla tavalla kuin casterikin. Ainut muutos oli pysty kateetin pituuden muutos, jota kasvatettiin 100mm määrä. Maksimaalinen negatiivinen camber-kulma Maksimaalinen Positiivinen camber-kulma Reikä on 6 mm leveä ja 40mm pitkä. Levyn toiselle laidalle porattiin jousijalkaa varten oma reikänsä. Jousijalka on M6-kierretankoa ja on kiinnitetty säätölevyyn kahdella M6-mutterilla. Säätötappi eli yläpallonivel on siipimutterilla vapautettavissa oleva pultti. (liite 1 sivu 6)
25 25 Säätölevyn kääntäminen, jolla camber-kulmaa säädetään, aiheuttaa kiinteän caster-kulman säädöksen. Kun säätölevyä käännetään, poikkeaa pyörännapa nollakohdastaan 145mm, jolloin casterin kulmamuutos on 16, Ohjausmekanismi Ohjausmekanismin suunnittelun lähtökohtana oli suunnitella toimiva ohjausjärjestelmä, jonka avulla voidaan demonstroida ohjaavan akselin toimintaa. Mekanismin mitoitukseen vaikuttivat olennaisesti auraus- ja harituskulmat. Auraus- ja harituskulmien demonstrointia pyrittiin maksimoimaan. Kääntövarren ja rattiakselin välinen matka, jolloin pyörä on suorassa runkoon nähden, on niin sanottu nollakohta. Ohjauksen suunnittelussa oli ensin ymmärrettävä perusasiat, eli miten ohjaus toimii. Ohjaus on yksikertainen geometrinen toiminta, joka muutetaan mekaaniseksi työksi. Jos ohjausta ajatellaan mahdollisimman yksinkertaisesti, on kuvaus ylhäältäpäin helpoin tapa käsitellä asiaa. Pyörän navat on kiinnitetty Z-akseliin (kuvassa 11. Y-akseliin), jonka ympäri ne pyörivät. Tämän pyörimisen sallii ylä- ja alapään kiinnityksien laakerointi tai nivelöinti, riippuu pitkälti pyöräntuentaratkaisusta. Ohjauksen ideana on pyöräyttää pyörän napoja kääntövarren välityksellä tietty matka jolloin haluttu kääntyvyys saavutetaan. Tämä onnistuu raidetangon edestakaisella liikkeellä. Edestakainen liike kierrättää kääntövartta ympyränkehää pitkin. Raidetankojen edestakainen liike toteutetaan muuttamalla ratin pyörittämiseen tarkoitettu liike edestakaiseksi liikkeeksi. Tämän toteuttamiseen on autoteollisuudessa useita ratkaisuja. Tässä työssä päädyttiin mahdollisimman yksinkertaiseen ratkaisuun.
26 26 Kuva 11. Ohjauksen toiminta Tämän tiedostettua pyrin helppokäyttöisyyden nimissä keksimään mahdollisimman nopean, varmatoimisen, säätövaraltaan hyvän sekä minimoimaan ratkaisusta aiheutuvat kulut. Tovin pohdinnan jälkeen päädyn rattiakselin päähän kiinnitettävään kääntölevyyn ja raidetangoissa venekäytössä olevaan vanttiruuviin ja silmukkaruuviiveihin. Vanttiruuvi antaa mahdollisuuden säätää raidetankoa käyttämättä työkaluja ja säätövaraa on erittäin hyvin. Myös vanttiruuvin hinta/hyötysuhde on tähän malliin optimaalinen. Vanttiruuvi on säätömekanismin oleellisin osa. Vanttiruuvin sisältämä säätövara oli ratkaiseva tekijä raidetangon kokonaismitassa, koska auraus- ja harituskulmien nollakohta mitoitettiin vanttiruuvin keskelle, jolloin mahdollinen säätö olisi tasapuolinen molemmille kulmille. Rattiakselin kiinnityspisteen valintaan oli huomioitava helppo kiinnitettävyys, koska jokaisen ylimääräisen lisäkkeen kiinnittäminen malliin olisi aiheuttanut vain esteettistä ja käytönaikaista haittaa. Tästä syystä akseli kiinnitettiin runkopalaan.
27 27 Kiinnityspiste luotiin M6-silmukkaruuvilla, joka kiinnitettiin runkoon M6-mutterilla ja M6-siipimutterilla. Rattiakseli vietiin silmukkaruuvin läpi ja kiinnitettiin puristustyyppisesti silmukkaan kiinni. Kiinnityksessä käytettiin 2*M6-mutteria sekä kahta prikkaa. Lisäksi silmukan sisään tehtiin välyksen poistava kumi, autonrenkaan venttiilin istukasta. Akselinpäähän kiinnitettiin kääntölevy. Kääntölevy kiinnitettiin rattiakseliin kahdella M6-mutterilla. Kääntölevyn pituus mitoitettiin nelipyöräohjaus demonstraation mahdollistamisen sekä silmukkaruuvin pituuden mukaan. Nämä asiat huomioiden kääntölevy on 50 mm pitkä ja 25 mm leveä. Kääntölevyyn on porattu kaksi 6 mm halkaisijan omaavaa reikää. Sisäreikä kiinnittää kääntölevyn rattiakseliin ja ulkopää kiinnittää levyn raidetankoihin. Raidetankojen suunnittelussa oli erityisesti huomioitava kiinnityspisteiden vapaaliike sekä varsinainen kääntyvyysmitta. Kiinnityspisteiden vapaaliikkeellä tarkoitetaan, niiden pyörimistä oman akselinsa ympäri. Jos tätä ei tapahtuisi, olisi kääntyminen mahdotonta. Raidetangon sisäpään kiinnitys toteutettiin silmukkaruuveilla, jotka kiinnitettiin kääntölevyyn puristus tyyppisesti. Sisäpään kiinnitys tehtiin M6-kierretangosta ja kahdella prikalla sekä kahdella M6-mutterilla. Silmukoiden sisään tehtiin välyksen poistamiseen tarkoitetut kumit autonrenkaan venttiilin istukasta. Raidetangon sisäpään kiinnitystapoja on kaksi. Ensimmäinen tapa on niin sanottu rajoitettu ohjaus, jossa sisäpäät kiinnitetään kääntölevyn molemmin puolin eli toinen alle ja toinen päälle. Tässä tapauksessa rattiakseli rajoittaa kääntymisen. Rajoittamattomassa ohjauksessa, raidetankojen sisäpään kiinnitys toteutetaan kääntölevyn alapuolelle eli sisäpäät puristetaan keskenään yhteen jolloin mikään ei rajoita kääntymistä. Tällä toteutuksella voidaan osoittaa esim. nelipyöräohjauksen perusidea, koska ratti kykenee kääntymään oman akselinsa ympäri.
28 28 Raidetangot jatkuvat M6-silmukkaruuveista jatkomutteripaloihin jotka yhdistävät M6-kierretangon ja silmukkaruuvin yhteen. Tämä yhdistäminen toteutettiin, koska silmukkaruuvi ei ollut yksinään tarpeeksi pitkä toteuttamaan auraus- ja haritussäätömahdollisuutta tasapuolisesti. Jatkomutterina toimi M6-jatkomutteri. Jatkomutterin toisessa päässä majailee M6-kierretanko. Kierretanko on kiinnitetty vanttiruuviin, joka toimii aurauksen ja harituksen säätöruuvina. Vanttiruuvin toisessa päässä on vanttiruuvin mukana tullut haarukkanivel. Haarukkanivel on kiinnitetty olkavarteen, joka on tehty M6-silmukkaruuvista. Kiinnitykseen käytin vanttiruuvin mukana tullutta sokkatappi -yhdistelmää, jonka ympärille tein välyksen poistavan kumin edellä mainituista materiaalista. Silmukkaruuvi on kääntövarsi, joka kiinnittyy pyörän napaan tehden niistä yhtenäisen toimivan järjestelmän. Silmukkaruuvi kiinnitetään pyörän napaan yhdellä M6-siipimutterilla sekä yhdellä normaalilla M6-mutterilla. Auraus- ja harituskulmien suunnittelun rajoittavana tekijänä oli vanttiruuvin sisäinen säätövara, koska kulmien nollakohta on säätövaran keskellä. Vanttiruuvin säätövara on 37,5 mm suuntaansa. Tämä tiedostettuna voidaan laskea maksimaalisia kulmia auraus- ja harituskulmien säätöön. Kulmien laskentaan käytin ympyräliikkeestä johtuen ympyränsektorilaskuja. Ympyränsektorin kaaren pituus b voidaan laskea kaavalla, jossa α on kulma ja r on ympyrän säde. Tätä kaavaa hyödyntäen voidaan laskea α-kulma, joka on pyörän kääntymisen maksimaalinen kulma. Koska auraus- ja harituskulmien muutos tapahtuu samalla tavalla kuin kääntyminen, käytin samoja kaavoja molempien laskentaan. Kääntyvyyslaskelmissa olen käyttänyt auraus- ja harituskulmien nollakohtaa.
29 29 Auraus- ja harituskulmien maksimaalinen muutos Kaarenpituus b on kääntölevynmitta maksimissaan 50 mm, mutta rajoitetussa ohjauksessa b lyhenee raidetangon säteen verran, jolloin mitta on 47 mm. Säde pyörän navan nivelöinnistä olkavarteen on 75 mm. Rajoittamattomassa ohjauksessa oleva kääntymiseen mahdollistettu kääntymiskulma. Rajoitetussa ohjauksessa toteutuva maksimaalinen kääntymiskulma. Kuva 12. Kääntövarren kulkema matka 90 asteen kääntyvyydessä 3.4 Pöytälevy Pöytälevyn tarkoituksena on tukea pienoismallia sekä osoittaa pyörien kääntökulmat. Pöytälevyyn on asennettu auraus- ja harituskulmien osoittamista varten kaksi asteikkoa, jotka kattavat 180 asteen kääntyvyyden. (liite 1 sivu 1-5)
30 30 Pöytälevyksi valittiin varsinaista pöytälevyä, helpon työstettävyyden ja helpon saatavuuden ansiosta. Levyn palanen löydettiin autolaboratorion rengashuoneen nurkasta. Pöytälevyn kokonaismitaksi valittiin 700 mm ja leveydeksi tuli 250mm. Levyn keskiakselille porattiin kaksi 8mm reikää jotka luotiin pienoismallin kiinnitystä varten. Levyä muotoiltiin viistämällä siitä molempien kylkien keskikohdasta pois 250mm leveä ja 100mm korkeimmillaan oleva pala pois helpottamaan kantamisen aikana aiheutuvan heilumisliikkeen ansiosta muodostuvaan mahdollista kosketusta reiden kanssa. Levyn molempiin päihin pyörien alapuolelle tuli auraus- ja harituskulmien näyttämistä sekä mitoittamista helpottavat asteikot. Asteikot mitoitettiin 180 asteen kääntyvyydelle. Molemmilla puolilla on oma asteikkonsa. 3.5 Asteikot Pienoismallin käyttöä varten suunniteltiin siihen kiinnitettävät asteikot, jotka noudattavat mahdollisimman tarkasti opetustarkoituksessa tehtäviä kulmamuutoksia. Laskennallisia arvoja käytettiin asteikkojen mitoituksen pohjana. Varsinaisia asteikkoja tuli yhteensä kuusi kappaletta. Kaksi osoittaa KPI-kulmien muutoksen toiset kaksi osoittavat camber- ja caster-kulman muutokset ja kolmantena osoitetaan pyörän kääntyvyys. Asteikot suunniteltiin tietokoneella ja ne tulostettiin koulun omalla tarratulostimella. Ennen tulostamista tulostin oli asennettava ja tähän kului päivä aikaa.
31 31 4 PIENOSMALLIN KÄYTTÖ Pienoismalli suunniteltiin opetuskäyttöön Turun ammattikorkeakoululle. Pienoismallin tarkoituksena on demonstroida staattisesti auton ohjautuvalla akselilla tapahtuvia pyöränkulman muutoksia. Tässä työssä keskitytään selostamaan camber-kulman, auraus- ja harituskulman, kaartoharituksen ja ackermann-ehdon osalta pienoismallin toimintaa. 4.1 Camber-kulma Camber-kulman säätö on pienoismallissa mahdollinen suorittaa kahdella tapaa. Tapa, joka on varsinaisesti suunniteltu ja laskettu, on kiinnitetty navan yläpuolella olevaan säätölevyyn. Toinen tapa on siirtää alapalloniveltä edestakaisin alatukivarressa. Tämä alatukivarressa oleva säätömahdollisuus on luotu vain camber-kulman demonstraatioon, koska kyseinen siirtely aiheuttaa voimakasta taipumista ylätukivarsissa sekä jousijalassa. Alapallonivelestä suoritettavaa säätö ei ole edellä mainituista syistä mitoitettu taikka laskettu. Camber-kulman varsinaiseen suunniteltuun säätöön tarkoitetussa säätölevyssä on asteikko, jonka mukaan säätäminen saadaan tarkastettua. Säätäminen tapahtuu hyvin yksinkertaisesti. Huomioon otettava asia säätölevyn käännöksessä on caster-kulman muutos, joka on 16,17. Ensimmäisenä askeleena on löystytettävä hieman jousijalan ylempää siipimutteria, joka täten mahdollistaa säätölevyn kääntämisen. Käännöksen jälkeen on kierrettävä jousijalan siipimutteri uudelleen kiinni, jolloin säätölevy lukittuu camberin säätöön tarkoitettuun asentoon. Seuraavaksi on avattava pyörän navan yläpään ja säätölevyn puristukseen tarkoitettu siipimutteri. Siipimutterin avaamisen jälkeen on mahdollista säätää camber-kulmaa joko negatiiviseen tai positiiviseen asentoon.
32 32 Kuva 13. Camber-säätölevy Maksimaalisten kulmien muutokset ovat laskennallisesti 5,7 negatiiviseen suuntaan ja Positiiviseen suuntaan 11,3. Negatiiviseen kulman muutoksen rajoittaa pyörä. 4.2 Auraus- ja harituskulma Auraus- ja harituskulmien säätöön on vain yksi tapa. Tämä tapa on vanttiruuvin ansiota. Yksinkertaisimmillaan vanttiruuvia joko kierretään auki tai kierretään kiinni, jolloin raidetangon mitta lyhenee tai pidentyy. Tämä muutos aiheuttaa kääntövarren siirtymisen ympyräkehäänsä pitkin jolloin pyörien auraus- ja harituskulmat tulevat esille. Maksimaalinen aurauskulma on 28,6 ja maksimaalinen harituskulma on 28,6.
33 33 Huomioitavia asioita on säätöä suoritettaessa kolme. Vanttiruuvia ei saa kiertää liian auki koska, kierretangot voivat tipahtaa ulos vanttiruuvista. Asian helpottamiseksi merkkasin punaisella tussilla varoitusmerkit kierretankoihin. Toinen huomioitava asia on jatkomuttereiden mahdollinen löystyminen, tämä voi aiheuttaa raidetankojen katkeamisen. Kolmas huomioitava asia on painonsiirtymä. Kun aurauksen tai harituksen maksimaalista kulmaa ollaan demonstroimassa, paino siirtyy huomattavasti kulman vaatimalle puolelle. Vaikka pienoismalli on tukevasti tuettu, on silti vältettävä ylimääräistä tökkimistä, koska malli voi kaatua. Kuva 14. Pyöränkääntyvyys asteikko
34 Ohjaus Ohjausmekanismi on suunniteltu toimimaan kahdella tavalla. Rajoitetulla ohjauksella ja rajoittamattomalla ohjauksella. Rajoitetulla ohjauksella on mahdollista näyttää tyypillisesti toimiva ohjausjärjestelmä. Rajoittamattoman ohjauksen ideana on mahdollistaa nelipyöräohjauksen demonstraatio. Rajoitetunohjauksen tapauksessa raidetanko rajoittaa ylikääntämisen. Raidetanko ottaa kiinni rattiakseliin jolloin kääntymien estyy. Rajoitettu ohjaus toteutetaan kiinnittämällä kääntölevyn molemmin puolin raidetangon sisäpää. Kiinnityksessä on huomioitava pieni löysyyden tarve, sillä muuten liikettä ei tapahdu. Rajoittamattomassa ohjauksessa raidetangon sisäpäät kiinnitetään kääntölevyn alapuolelle ja kiinnityspisteeksi valitaan tarpeeksi alhainen piste, jotta rattiakselin alapuoleinen kiinnityspultti ei ota kiinni raidetankoihin. Tällöin ohjaus on rajoittamaton. Kun ohjaus on rajoittamaton, voidaan rattia kiertää haluttu määrä. Tällöin pyörien tarkkailu tuottaa hyvän tuloksen. Nelipyöräohjauksen perusideana on sallia sen akselin, joka pääasiallisesti ei ohjaa lievä kääntyminen tietyissä tilanteissa. Kun rattia käännetään, kääntyvät taka-akselin pyörät ensiksi vähän samaan suuntaan kuin etupyörät. Kun rattia käännetään enemmän, pyörät ensin suoristuvat ja sen jälkeen alkavat kääntyä vastakkaiseen suuntaan. Kyseisen toiminnon demonstraatiossa on oleellista näyttää tarkoin, miten pyörät kääntyvät kun, rattia käännetään vain toiseen suuntaan.
35 35 Kuva 15. Ohjausmekanismi 4.4 Ackermann-ehto & kaartoharitus Ackermann-ehdon ja kaartoharituksen näyttäminen on mahdollista pienen harituskulman avulla. Harituskulman ei tarvitse olla mahdottoman suuri jotta, olisi mahdollista näyttää ehdon määräämä tarve. 4.5 Pöytälevy Pöytälevyn tarkoituksena on tukea pienoismallia sekä osoittaa pyörien kääntökulmat. Pöytälevyyn on asennettu auraus ja harituskulmien osoittamista varten kaksi asteikkoa molemmin puolin, jotka kattavat 180 asteen kääntyvyyden.
36 36 5 YHTEENVETO Työn tarkoituksena oli luoda opetusmateriaalia Turun ammattikorkeakoulun Auto- ja kuljetustekniikan koulutusohjelmalle. Opetusmateriaalilla tarkoitetaan pienoismallia olemassa olevasta autokäytössä toimivasta etuakseliratkaisusta. Tässä opinnäytetyössä perehdyttiin auton pyöränkulmien teoriaan, ja se on pohjana pienoismallin suunnittelemiselle ja rakentamiselle. Teoriaosassa selostetaan perusteet pyöränkulmista ja niiden toiminnasta. Suunniteltaessa on selvitetty laskennallisesti pyöränkulmien maksimaaliset muutokset ja laskettu maksimaaliset säätövarat. Pienoismallin oli oltava kykenevä näyttämään pyöränkulmien toiminta ja muutokset staattisessa muodossa. Pyöränkulmien ja ohjauksen oli oltava mahdollisimman realistinen. Jotta kyseinen asia onnistuu, oli pienoismalli mitoitettava järkevään mittasuhteeseen todelliseen autoon nähden. Pienoismallin suunnittelussa pyrittiin huomioimaan jokainen asia mahdollisimman tarkasti. Pienoismallin valmistamisessa suunnittelun virheet korjattiin nopeilla ja mahdollisimman käytännöllisillä ratkaisuilla. Pienoismalli on rakennettu alusta alkaen käsin.
37 37 LÄHTEET Gillespie, T Fundamentals of Vehicle Dynamics. Warrendale, PA, USA SAE international Gscheidle R Fachkunde Kraftfahrzeugtechnik. Haan, Germany: Verlag Europa-Lehrmittel Laine O Autotekniikka 1. osa: ajo-ominaisuudet, 3, Tampere: OY Sonator AB Laine O Autotekniikka 2.osa, 3., Tampere: OY Sonator AB Turun ammattikorkeakoulu 2012a. Tekniikka, ympäristö ja talous -tulosalueen esite. Turun ammattikorkeakoulu 2012b. Turun ammattikorkeakoulun esittely. Viitattu > esittely Turun ammattikorkeakoulu 2012c. Auto- ja kuljetustekniikan esite
38 Liite 1 sivu 1 (9) LIITTEET LIITE 1, räjäytyskuvat, osaluettelot ja osapiirustukset Kuva 16. Raidetangon räjäytyskuva Raidetangot*2 Osa Mitta KPL Tuotenumero (biltema) Käyttötarkoitus Silmukkaruuvi M Raidetangon sisäpää Jatkomutteri M Silmukkaruuvin ja kierretangon yhdistys Kierretanko M6* Välipala Vanttiruuvi M Säätötanko Haarukkanivel Raidetangon ulkopää Sokka Raidetangon ulommanpään kiinnitys Välyskumi Välyksen poisto Taulukko 2. Raidetangon komponenttiluettelo
39 Liite 1 sivu 2 (9) Kuva 17. Rungon kiinnityksen räjäytyskuva Kiinitys runkoon Osa Mitta KPL Tuotenumero (biltema) Käyttötarkoitus Silmukkaruuvi M Varsinainen kiinnityspiste Mutteri M Kiinnitys Välyskumi Välyksen poisto Siipimutteri M Kiinnitys Taulukko 3. Rungon kiinnityksen komponenttiluettelo
40 Liite 1 sivu 3 (9) Kuva 18. Kääntövarren räjäytyskuva Kääntövarsi Osa Mitta KPL Tuotenumero (biltema) Käyttötarkoitus Silmukkaruuvi M Varsinainen kiinnityspiste Mutteri M Kiinnitys Siipimutteri M Kiinnitys Taulukko 4. Kääntövarren komponenttiluettelo
41 Liite 1 sivu 4 (9) Kuva 19. Rattiakselin räjäytyskuva Rattiakseli Osa Mitta KPL Tuotenumero (biltema) Käyttötarkoitus Ratti Ratti Jatkomutteri M Ratin ja kierretangon yhdistys Kierretanko M6* Rattiakseli Mutteri M Kiinnitys Siipimutteri M Kiinnitys Aluslevy 4 Suoja Välyskumi 1 Välyksen poisto Taulukko 5. Rattiakselin komponenttiluettelo
42 Liite 1 sivu 5 (9) Kuva 20. Jousijalka Jousijalka*2 Osa Mitta KPL Tuotenumero (biltema) Käyttötarkoitus Kierretanko M6* Jousijalka Mutteri M Kiinnitys Siipimutteri M Kiinnitys Taulukko 6. Jousijalan komponenttiluettelo
43 Liite 1 sivu 6 (9) Kuva 21. camber/caster-säätölevy Säätölevy*2 Osa Mitta KPL Tuotenumero (biltema) Käyttötarkoitus Levy 50mm*40mm 1 Säätölevy Siipimutteri M Kiinnitys Taulukko 7. Camber/caster-säätölevyn komponenttiluettelo
44 Liite 1 sivu 7 (9) Kuva 22. Pyörän navan räjäytyskuva Pyörän napa*2 Osa Mitta KPL Tuotenumero (biltema) Käyttötarkoitus Pultti M6* 1 Yläpään kiinnitys Mutteri nylock M Kiinnitys Siipimutteri M Kiinnitys Aluslevy 1 Suoja Pyörän napa 70*50mm 1 Napa Taulukko 8. Pyörän navan komponenttiluettelo
45 Liite 1 sivu 8 (9)
46 Liite 1 sivu 9 (9) Kuva 23. Pyörän kiinnitys Pyörän kiinnitys Osa Mitta KPL Tuotenumero (biltema) Käyttötarkoitus Pultti M8*100 1 Kiinnitystappi Mutteri M Spaceri Kupumutteri M Kiinnitys Mutteri M8 1 Suoja Pyörä 8" 1 Napa Taulukko 9. Pyörän kiinnitys
MCPHERSON-JOUSTINTUEN PIENOISMALLI
 Opinnäytetyö (AMK) Auto- kuljetustekniikan koulutusohjelma Käyttöpainotteinen suuntautumisvaihtoehto 2012 Jussi Naatula MCPHERSON-JOUSTINTUEN PIENOISMALLI OPINNÄYTETYÖ (AMK) TIIVISTELMÄ TURUN AMMATTIKORKEAKOULU
Opinnäytetyö (AMK) Auto- kuljetustekniikan koulutusohjelma Käyttöpainotteinen suuntautumisvaihtoehto 2012 Jussi Naatula MCPHERSON-JOUSTINTUEN PIENOISMALLI OPINNÄYTETYÖ (AMK) TIIVISTELMÄ TURUN AMMATTIKORKEAKOULU
PYÖRÄN ASENTOKULMIEN PERUSTEET. Johdanto pyörän asentokulmiin Tutustuminen asentokulmiin ja niiden tarkoitukseen Suuntauksen nyrkkisäännöt
 PYÖRÄN ASENTOKULMIEN PERUSTEET Johdanto pyörän asentokulmiin Tutustuminen asentokulmiin ja niiden tarkoitukseen Suuntauksen nyrkkisäännöt Johdanto pyörän asentokulmiin Pyörien asentokulmien säätöön on
PYÖRÄN ASENTOKULMIEN PERUSTEET Johdanto pyörän asentokulmiin Tutustuminen asentokulmiin ja niiden tarkoitukseen Suuntauksen nyrkkisäännöt Johdanto pyörän asentokulmiin Pyörien asentokulmien säätöön on
Rungon säädöt. Teoriaa ja käytäntöä
 Rungon säädöt Teoriaa ja käytäntöä Kartin osat Kokoaminen Ei niin helppoa kuin näyttää Käytä aikaa, suunnittele Tarkista osien sopivuus Älä käytä väkivaltaa osien asennuksessa Osat eivät saa jäädä jännitykseen
Rungon säädöt Teoriaa ja käytäntöä Kartin osat Kokoaminen Ei niin helppoa kuin näyttää Käytä aikaa, suunnittele Tarkista osien sopivuus Älä käytä väkivaltaa osien asennuksessa Osat eivät saa jäädä jännitykseen
LMM KARTING TEAM. Rungon perussäädöt
 Rungon perussäädöt 1. Aurauskulma 1. Auraus 2. Haritus Auraus ja haritus on kulma jolla etupyörien kulmat poikkeavat ajosuunnassa toisistaan. Auraus = pyörät on kääntynyt sisäänpäin. Haritus = pyörät sojottavat
Rungon perussäädöt 1. Aurauskulma 1. Auraus 2. Haritus Auraus ja haritus on kulma jolla etupyörien kulmat poikkeavat ajosuunnassa toisistaan. Auraus = pyörät on kääntynyt sisäänpäin. Haritus = pyörät sojottavat
Vaihtolava-ajoneuvot. Yleistä tietoa vaihtolava-ajoneuvoista
 Yleistä tietoa vaihtolava-ajoneuvoista Yleistä tietoa vaihtolava-ajoneuvoista Vaihtolava-ajoneuvoja pidetään vääntöherkkinä. Vaihtolava-ajoneuvojen kanssa voidaan käyttää erilaisia kuormalavoja erilaisiin
Yleistä tietoa vaihtolava-ajoneuvoista Yleistä tietoa vaihtolava-ajoneuvoista Vaihtolava-ajoneuvoja pidetään vääntöherkkinä. Vaihtolava-ajoneuvojen kanssa voidaan käyttää erilaisia kuormalavoja erilaisiin
Jussi Huhta-Koivisto. Locostin ajodynamiikka ja alustageometria. Opinnäytetyö Kevät 2013 Tekniikan yksikkö Auto- ja työkonetekniikan koulutusohjelma
 Jussi Huhta-Koivisto Locostin ajodynamiikka ja alustageometria Opinnäytetyö Kevät 2013 Tekniikan yksikkö Auto- ja työkonetekniikan koulutusohjelma 1 SEINÄJOEN AMMATTIKORKEAKOULU Opinnäytetyön tiivistelmä
Jussi Huhta-Koivisto Locostin ajodynamiikka ja alustageometria Opinnäytetyö Kevät 2013 Tekniikan yksikkö Auto- ja työkonetekniikan koulutusohjelma 1 SEINÄJOEN AMMATTIKORKEAKOULU Opinnäytetyön tiivistelmä
Avainsanat: geometria, kolmio, ympyrä, pallo, trigonometria, kulma
 OuLUMA - Jussi Tyni OuLUMA, sivu 1 Ihastellaan muotoja Avainsanat: geometria, kolmio, ympyrä, pallo, trigonometria, kulma Luokkataso: lukio Välineet: kynä, paperia, laskin Tavoitteet: Tarkoitus on arkielämään
OuLUMA - Jussi Tyni OuLUMA, sivu 1 Ihastellaan muotoja Avainsanat: geometria, kolmio, ympyrä, pallo, trigonometria, kulma Luokkataso: lukio Välineet: kynä, paperia, laskin Tavoitteet: Tarkoitus on arkielämään
ThermiSol Platina Pi-Ka Asennusohje
 Platina Pi-Ka ThermiSol Platina Pi-Ka essa kerrotaan ThermiSol Platina Kattoelementin käsittelyyn, kiinnitykseen ja työstämiseen liittyviä ohjeita. Platina Pi-Ka 2 1. Elementin käsittely... 3 1.1 Elementtikuorman
Platina Pi-Ka ThermiSol Platina Pi-Ka essa kerrotaan ThermiSol Platina Kattoelementin käsittelyyn, kiinnitykseen ja työstämiseen liittyviä ohjeita. Platina Pi-Ka 2 1. Elementin käsittely... 3 1.1 Elementtikuorman
Ville Lumppio. Legends kilpa-auton alustageometria. Opinnäytetyö Kevät 2014 Tekniikan yksikkö Kone- ja tuotantotekniikan koulutusohjelma
 Ville Lumppio Legends kilpa-auton alustageometria Opinnäytetyö Kevät 2014 Tekniikan yksikkö Kone- ja tuotantotekniikan koulutusohjelma 2 SEINÄJOEN AMMATTIKORKEAKOULU Opinnäytetyön tiivistelmä Koulutusyksikkö:
Ville Lumppio Legends kilpa-auton alustageometria Opinnäytetyö Kevät 2014 Tekniikan yksikkö Kone- ja tuotantotekniikan koulutusohjelma 2 SEINÄJOEN AMMATTIKORKEAKOULU Opinnäytetyön tiivistelmä Koulutusyksikkö:
TEKNIIKKA JA LIIKENNE. Auto- ja kuljetustekniikka. Jälkimarkkinointi OPINNÄYTETYÖ. Formula SAE -kilpa-auton jousituksen suunnittelu
 TEKNIIKKA JA LIIKENNE Auto- ja kuljetustekniikka Jälkimarkkinointi OPINNÄYTETYÖ Formula SAE -kilpa-auton jousituksen suunnittelu Työn tekijä: Aleksi Malinen Työn ohjaaja: Marko Rämänen Työn ohjaaja: Matti
TEKNIIKKA JA LIIKENNE Auto- ja kuljetustekniikka Jälkimarkkinointi OPINNÄYTETYÖ Formula SAE -kilpa-auton jousituksen suunnittelu Työn tekijä: Aleksi Malinen Työn ohjaaja: Marko Rämänen Työn ohjaaja: Matti
Päällirakenteen kiinnitys. Kiinnitys apurungon etuosassa
 Kiinnitys apurungon etuosassa Kiinnitys apurungon etuosassa Lisätietoa kiinnityksen valinnasta on asiakirjassa Apurungon valinta ja kiinnitys. Rungon etuosassa on 4 erityyppistä päällirakenteen kiinnikettä:
Kiinnitys apurungon etuosassa Kiinnitys apurungon etuosassa Lisätietoa kiinnityksen valinnasta on asiakirjassa Apurungon valinta ja kiinnitys. Rungon etuosassa on 4 erityyppistä päällirakenteen kiinnikettä:
SCdefault. 900 Asennusohje
 SCdefault 900 Asennusohje SITdefault Sport-alusta MONTERINGSANVISNING INSTALLATION INSTRUCTIONS MONTAGEANLEITUNG INSTRUCTIONS DE MONTAGE Accessories Part No. Group Date Instruction Part No. Replaces 12
SCdefault 900 Asennusohje SITdefault Sport-alusta MONTERINGSANVISNING INSTALLATION INSTRUCTIONS MONTAGEANLEITUNG INSTRUCTIONS DE MONTAGE Accessories Part No. Group Date Instruction Part No. Replaces 12
Betonipumppuautot. Yleisiä tietoja betonipumppuautoista. Rakenne. Betonipumppuautojen päällirakennetta pidetään erityisen vääntöjäykkänä.
 Yleisiä tietoja betonipumppuautoista Yleisiä tietoja betonipumppuautoista Betonipumppuautojen päällirakennetta pidetään erityisen vääntöjäykkänä. Rakenne Tee päällirakenteesta niin vahva ja jäykkä, että
Yleisiä tietoja betonipumppuautoista Yleisiä tietoja betonipumppuautoista Betonipumppuautojen päällirakennetta pidetään erityisen vääntöjäykkänä. Rakenne Tee päällirakenteesta niin vahva ja jäykkä, että
Suorita vaihtaminen seuraavassa järjestyksessä:
 Kuinka vaihtaa etujoustintuen laakeri Volkswagen T5 malliin Suorita vaihtaminen seuraavassa järjestyksessä: 1 Kiristä seisontajarrun vaijeri 3 2 Aseta kiilapalikat taka pyörien alle. 4 Nosta auton keula
Kuinka vaihtaa etujoustintuen laakeri Volkswagen T5 malliin Suorita vaihtaminen seuraavassa järjestyksessä: 1 Kiristä seisontajarrun vaijeri 3 2 Aseta kiilapalikat taka pyörien alle. 4 Nosta auton keula
Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Valitse 6 tehtävää!
 MAA Koe 4.4.011 Jussi Tyni Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Valitse 6 tehtävää! 1 Selitä ja piirrä seuraavat lyhyesti: a) Vieruskulmat b) Tangentti kulmasta Katsottuna.
MAA Koe 4.4.011 Jussi Tyni Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Valitse 6 tehtävää! 1 Selitä ja piirrä seuraavat lyhyesti: a) Vieruskulmat b) Tangentti kulmasta Katsottuna.
UMPIKORI JA KONTTI 4 Umpikorin ja kontin kiinnitys 5 PAKASTUS- JA KYLMÄLAITTEET 6
 Sisältö VÄÄNTÖJÄYKKÄ PÄÄLLIRAKENNE 3 UMPIKORI JA KONTTI 4 Umpikorin ja kontin kiinnitys 5 PAKASTUS- JA KYLMÄLAITTEET 6 SÄILIÖ JA BULKKI 6 Kiinnitys - säiliö 9 Kiinnitys - punnituslaitteet 11 Kiinnitys
Sisältö VÄÄNTÖJÄYKKÄ PÄÄLLIRAKENNE 3 UMPIKORI JA KONTTI 4 Umpikorin ja kontin kiinnitys 5 PAKASTUS- JA KYLMÄLAITTEET 6 SÄILIÖ JA BULKKI 6 Kiinnitys - säiliö 9 Kiinnitys - punnituslaitteet 11 Kiinnitys
Jussi Klemola 3D- KEITTIÖSUUNNITTELUOHJELMAN KÄYTTÖÖNOTTO
 Jussi Klemola 3D- KEITTIÖSUUNNITTELUOHJELMAN KÄYTTÖÖNOTTO Opinnäytetyö KESKI-POHJANMAAN AMMATTIKORKEAKOULU Puutekniikan koulutusohjelma Toukokuu 2009 TIIVISTELMÄ OPINNÄYTETYÖSTÄ Yksikkö Aika Ylivieska
Jussi Klemola 3D- KEITTIÖSUUNNITTELUOHJELMAN KÄYTTÖÖNOTTO Opinnäytetyö KESKI-POHJANMAAN AMMATTIKORKEAKOULU Puutekniikan koulutusohjelma Toukokuu 2009 TIIVISTELMÄ OPINNÄYTETYÖSTÄ Yksikkö Aika Ylivieska
Akselipainolaskelmat. Yleistä tietoa akselipainolaskelmista
 Kun kuorma-autoa halutaan käyttää mihin tahansa kuljetustyöhön, sen alustaa täytyy täydentää jonkinlaisella päällirakenteella. Akselipainolaskelmien tavoitteena on optimoida alustan ja päällirakenteen
Kun kuorma-autoa halutaan käyttää mihin tahansa kuljetustyöhön, sen alustaa täytyy täydentää jonkinlaisella päällirakenteella. Akselipainolaskelmien tavoitteena on optimoida alustan ja päällirakenteen
METALLILETKUJEN ASENNUSOHJEITA
 METALLILETKUJEN ASENNUSOHJEITA METALLILETKUJEN ASENNUSOHJEITA Asennustapa A Asennustapa B Ø 12-100 Ø 125-300 2 Lasketaan kaavalla FS=2,3 r a=1,356 r Taivutussäde "r", kun asennus kuvan A mukaan Asennus
METALLILETKUJEN ASENNUSOHJEITA METALLILETKUJEN ASENNUSOHJEITA Asennustapa A Asennustapa B Ø 12-100 Ø 125-300 2 Lasketaan kaavalla FS=2,3 r a=1,356 r Taivutussäde "r", kun asennus kuvan A mukaan Asennus
Samsung tarakka-akku Asennusohje
 Samsung tarakka-akku Asennusohje (voidaan soveltaa myös muihin tarakka-akkuihin) Kiinnitysosat: Asennus: Huom. Koska pyöriä on erilaisia, on nämä ohjeet suuntaa antavia. Lue ohjeet läpi ennen asennusta.
Samsung tarakka-akku Asennusohje (voidaan soveltaa myös muihin tarakka-akkuihin) Kiinnitysosat: Asennus: Huom. Koska pyöriä on erilaisia, on nämä ohjeet suuntaa antavia. Lue ohjeet läpi ennen asennusta.
Etunimi. Sukunimi. Oppimistavoite: ymmärtää, kuinka positiiviset ja negatiiviset magneettiset navat tuottavat työntö- ja vetovoimaa.
 1 Magneettiset navat Oppimistavoite: ymmärtää, kuinka positiiviset ja negatiiviset magneettiset navat tuottavat työntö- ja vetovoimaa. 1. Nimeä viisi esinettä, joihin magneetti kiinnittyy. 2. Mitä magneetin
1 Magneettiset navat Oppimistavoite: ymmärtää, kuinka positiiviset ja negatiiviset magneettiset navat tuottavat työntö- ja vetovoimaa. 1. Nimeä viisi esinettä, joihin magneetti kiinnittyy. 2. Mitä magneetin
KESTOMAGNEETTI VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA. Jani Vitikka p87434 Hannu Tiitinen p87432. Dynaaminen kenttäteoria SATE2010
 VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Jani Vitikka p87434 Hannu Tiitinen p87432 Dynaaminen kenttäteoria SATE2010 KESTOMAGNEETTI Sivumäärä: 10 Jätetty tarkastettavaksi: 16.1.2008 Työn tarkastaja
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Jani Vitikka p87434 Hannu Tiitinen p87432 Dynaaminen kenttäteoria SATE2010 KESTOMAGNEETTI Sivumäärä: 10 Jätetty tarkastettavaksi: 16.1.2008 Työn tarkastaja
KISASÄÄNNÖT JA PROJEKTI 5.-9. LK
 KISASÄÄNNÖT JA PROJEKTI 5.-9. LK Sisällys 1. InnoGP CO 2 Dragsters muotoiluprojekti... 3 2. InnoGP kisakonsepti, CO 2 Dragsterit teknologiakasvatuksessa... 3 3. CO 2 Dragsterit muotoiluprojekti... 4 4.
KISASÄÄNNÖT JA PROJEKTI 5.-9. LK Sisällys 1. InnoGP CO 2 Dragsters muotoiluprojekti... 3 2. InnoGP kisakonsepti, CO 2 Dragsterit teknologiakasvatuksessa... 3 3. CO 2 Dragsterit muotoiluprojekti... 4 4.
Saab 9-3 CV M04-, 4D/5D M06-
 SCdefault 900 Asennusohje SITdefault MONTERINGSANVISNING INSTALLATION INSTRUCTIONS MONTAGEANLEITUNG INSTRUCTIONS DE MONTAGE Sport-alusta Accessories Part No. Group Date Instruction Part No. Replaces 55
SCdefault 900 Asennusohje SITdefault MONTERINGSANVISNING INSTALLATION INSTRUCTIONS MONTAGEANLEITUNG INSTRUCTIONS DE MONTAGE Sport-alusta Accessories Part No. Group Date Instruction Part No. Replaces 55
SEMTUN JVA+ MUURAUS- KANNAKKEET
 SEMTUN JVA+ MUURAUS- KANNAKKEET KÄYTTÖ- JA SUUNNITTELUOHJE 19.5.2016 - 1 - SISÄLLYSLUETTELO 1 YLEISTÄ... - 2-1.1 Yleiskuvaus... - 2-1.2 Toimintatapa... - 3-1 MITAT JA MATERIAALIT... - 4-2.1 Kannaketyypit...
SEMTUN JVA+ MUURAUS- KANNAKKEET KÄYTTÖ- JA SUUNNITTELUOHJE 19.5.2016 - 1 - SISÄLLYSLUETTELO 1 YLEISTÄ... - 2-1.1 Yleiskuvaus... - 2-1.2 Toimintatapa... - 3-1 MITAT JA MATERIAALIT... - 4-2.1 Kannaketyypit...
MATEMATIIKAN TYÖT KONNEVEDEN KENTTÄTYÖJAKSOLLA / KEVÄT 2015
 MATEMATIIKAN TYÖT KONNEVEDEN KENTTÄTYÖJAKSOLLA / KEVÄT 2015 Tehtäviin sisältyy Merikiikarin avulla suoritettavia mittauksia ja trigonometrian avulla suoritettavia laskutehtäviä. Tarvikkeet: Merikiikarit,
MATEMATIIKAN TYÖT KONNEVEDEN KENTTÄTYÖJAKSOLLA / KEVÄT 2015 Tehtäviin sisältyy Merikiikarin avulla suoritettavia mittauksia ja trigonometrian avulla suoritettavia laskutehtäviä. Tarvikkeet: Merikiikarit,
Vaihtolava-autot. Yleistä tietoa vaihtolava-autoista
 Yleistä tietoa vaihtolava-autoista Yleistä tietoa vaihtolava-autoista Vaihtolava-autoja käytetään, jotta kuormalava olisi nopea vaihtaa, mikä lisää ajoneuvon monipuolisuutta ja lyhentää seisokkeja. Esivalmiudet
Yleistä tietoa vaihtolava-autoista Yleistä tietoa vaihtolava-autoista Vaihtolava-autoja käytetään, jotta kuormalava olisi nopea vaihtaa, mikä lisää ajoneuvon monipuolisuutta ja lyhentää seisokkeja. Esivalmiudet
Lineaarialgebra MATH.1040 / voima
 Lineaarialgebra MATH.1040 / voima 1 Seuraavaksi määrittelemme kaksi vektoreille määriteltyä tuloa; pistetulo ja. Määritelmät ja erilaiset tulojen ominaisuudet saattavat tuntua, sekavalta kokonaisuudelta.
Lineaarialgebra MATH.1040 / voima 1 Seuraavaksi määrittelemme kaksi vektoreille määriteltyä tuloa; pistetulo ja. Määritelmät ja erilaiset tulojen ominaisuudet saattavat tuntua, sekavalta kokonaisuudelta.
Koontitehtäviä luvuista 1 9
 11 Koontitehtäviä luvuista 1 9 1. a) 3 + ( 8) + = 3 8 + = 3 b) x x 10 = 0 a =, b = 1, c = 10 ( 1) ( 1) 4 ( 10) 1 81 1 9 x 4 4 1 9 1 9 x,5 tai x 4 4 c) (5a) (a + 1) = 5a a 1 = 4a 1. a) Pythagoraan lause:
11 Koontitehtäviä luvuista 1 9 1. a) 3 + ( 8) + = 3 8 + = 3 b) x x 10 = 0 a =, b = 1, c = 10 ( 1) ( 1) 4 ( 10) 1 81 1 9 x 4 4 1 9 1 9 x,5 tai x 4 4 c) (5a) (a + 1) = 5a a 1 = 4a 1. a) Pythagoraan lause:
Auton korkeus/maavara
 Auton korkeus/maavara Hyvät lukijat, Jotkin saamamme kysymykset ovat viitanneet siihen, että Ferrari F2007 -pienoismallissa ei olisi riittävästi maavaraa. Tästä syystä olemme selvittäneet ohjeita ja tarkistaneet
Auton korkeus/maavara Hyvät lukijat, Jotkin saamamme kysymykset ovat viitanneet siihen, että Ferrari F2007 -pienoismallissa ei olisi riittävästi maavaraa. Tästä syystä olemme selvittäneet ohjeita ja tarkistaneet
Akselipainolaskelmat. Yleistä tietoa akselipainolaskelmista
 Yleistä tietoa akselipainolaskelmista Kun kuorma-autoa halutaan käyttää mihin tahansa kuljetustyöhön, tehtaalta toimitettua alustaa täytyy täydentää jonkinlaisella päällirakenteella. Yleistä tietoa akselipainolaskelmista
Yleistä tietoa akselipainolaskelmista Kun kuorma-autoa halutaan käyttää mihin tahansa kuljetustyöhön, tehtaalta toimitettua alustaa täytyy täydentää jonkinlaisella päällirakenteella. Yleistä tietoa akselipainolaskelmista
1 2 x2 + 1 dx. (2p) x + 2dx. Kummankin integraalin laskeminen oikein (vastaukset 12 ja 20 ) antaa erikseen (2p) (integraalifunktiot
 x + 2dx. Kummankin integraalin laskeminen oikein (vastaukset 12 ja 20 ) antaa erikseen (2p) (integraalifunktiot") Helsingin yliopisto, Itä-Suomen yliopisto, Jyväskylän yliopisto, Oulun yliopisto, Tampereen yliopisto ja Turun yliopisto Matematiikan valintakoe (Ratkaisut ja pisteytys) 500 Kustakin tehtävästä saa maksimissaan
Helsingin yliopisto, Itä-Suomen yliopisto, Jyväskylän yliopisto, Oulun yliopisto, Tampereen yliopisto ja Turun yliopisto Matematiikan valintakoe (Ratkaisut ja pisteytys) 500 Kustakin tehtävästä saa maksimissaan
Joel Vesivalo OFFSET-MITAN VAIKUTUKSET AUTON HALLITTAVUUTEEN. Kone- ja tuotantotekniikan koulutusohjelma 2015
 Joel Vesivalo OFFSET-MITAN VAIKUTUKSET AUTON HALLITTAVUUTEEN Kone- ja tuotantotekniikan koulutusohjelma 2015 OFFSET-MITAN VAIKUTUKSET AUTON HALLITTAVUUTEEN Vesivalo, Joel Satakunnan ammattikorkeakoulu
Joel Vesivalo OFFSET-MITAN VAIKUTUKSET AUTON HALLITTAVUUTEEN Kone- ja tuotantotekniikan koulutusohjelma 2015 OFFSET-MITAN VAIKUTUKSET AUTON HALLITTAVUUTEEN Vesivalo, Joel Satakunnan ammattikorkeakoulu
MM-THERMOX ASENNUSOHJE
 MM-THERMOX ASENNUSOHJE Nosto-ovet 2500x2150, 2500x2500 ja 2800x2300 Maahantuoja Smartia Oy 1 Turvallisuusohjeet Turvallisuutesi varmistamiseksi ja vahinkojen välttämiseksi, lue seuraavat ohjeet huolellisesti
MM-THERMOX ASENNUSOHJE Nosto-ovet 2500x2150, 2500x2500 ja 2800x2300 Maahantuoja Smartia Oy 1 Turvallisuusohjeet Turvallisuutesi varmistamiseksi ja vahinkojen välttämiseksi, lue seuraavat ohjeet huolellisesti
Installation instructions, accessories. Tasonsäätö. Volvo Car Corporation Gothenburg, Sweden. Sivu 1 / 17
 Installation instructions, accessories Ohje nro 8685630 Versio 1.1 Osa nro 8685627 Tasonsäätö Volvo Car Corporation Tasonsäätö- 8685630 - V1.1 Sivu 1 / 17 Varuste A0000162 A0000161 A0000197 A0800088 A0800625
Installation instructions, accessories Ohje nro 8685630 Versio 1.1 Osa nro 8685627 Tasonsäätö Volvo Car Corporation Tasonsäätö- 8685630 - V1.1 Sivu 1 / 17 Varuste A0000162 A0000161 A0000197 A0800088 A0800625
PESUKONEEN JA LINGON ASENNUS
 PESUKONEEN JA LINGON ASENNUS Vaatehoitotila kuuluu tärkeänä osana kiinteistöön. Laitteet ja varusteet on määriteltävä ja sijoitettava tilaan siten, että niiden käyttö on mahdollisimman helppoa ja esteetöntä.
PESUKONEEN JA LINGON ASENNUS Vaatehoitotila kuuluu tärkeänä osana kiinteistöön. Laitteet ja varusteet on määriteltävä ja sijoitettava tilaan siten, että niiden käyttö on mahdollisimman helppoa ja esteetöntä.
Pyramidi 9 Trigonometriset funktiot ja lukujonot 15.4.2011 HK1-1. Dsin3 x. 3cos3x. Dsinx. u( x) sinx ja u ( x) cosx. Dsin. Dsin
 sinx ja u ( x) cosx. Dsin. Dsin") Pyramidi 9 Trigonometriset funktiot ja lukujonot 5.4.0 HK- a) Dsin3 us ( ) cos3 3 us( ) s( ) 3cos3 s( ) 3 ja s( ) 3 u( ) sin ja u( ) cos b) Dsin 3 3 Dsin us ( ) s( ) sin ja s( ) cos 3 u( ) ja u( ) 3 3sin
Pyramidi 9 Trigonometriset funktiot ja lukujonot 5.4.0 HK- a) Dsin3 us ( ) cos3 3 us( ) s( ) 3cos3 s( ) 3 ja s( ) 3 u( ) sin ja u( ) cos b) Dsin 3 3 Dsin us ( ) s( ) sin ja s( ) cos 3 u( ) ja u( ) 3 3sin
Onni Seisomatelineen Käyttöohje
 Onni Seisomatelineen Käyttöohje Onni - seisomatelineen käyttöohje Sisällysluettelo Tuotteen kuvaus... 3 Perushuolto-ohje... 3 Tärkeää!... 3 1. Laatikon sisältö... 4 2. Alustan kokoonpano... 4 3. Rungon
Onni Seisomatelineen Käyttöohje Onni - seisomatelineen käyttöohje Sisällysluettelo Tuotteen kuvaus... 3 Perushuolto-ohje... 3 Tärkeää!... 3 1. Laatikon sisältö... 4 2. Alustan kokoonpano... 4 3. Rungon
PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9.2.2011
 PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9..0 Kokeessa saa vastata enintään kymmeneen tehtävään.. Sievennä a) 9 x x 6x + 9, b) 5 9 009 a a, c) log 7 + lne 7. Muovailuvahasta tehty säännöllinen tetraedri muovataan
PRELIMINÄÄRIKOE PITKÄ MATEMATIIKKA 9..0 Kokeessa saa vastata enintään kymmeneen tehtävään.. Sievennä a) 9 x x 6x + 9, b) 5 9 009 a a, c) log 7 + lne 7. Muovailuvahasta tehty säännöllinen tetraedri muovataan
Kierukkavaihteet GS 50.3 GS 250.3 varustettu jalalla ja vivulla
 Kierukkavaihteet GS 50.3 GS 250.3 varustettu jalalla ja vivulla Käytettäväksi ainoastaan käyttöohjeen yhteydessä! Tämä pikaopas EI korvaa käyttöohjetta! Pikaopas on tarkoitettu ainoastaan henkilöille,
Kierukkavaihteet GS 50.3 GS 250.3 varustettu jalalla ja vivulla Käytettäväksi ainoastaan käyttöohjeen yhteydessä! Tämä pikaopas EI korvaa käyttöohjetta! Pikaopas on tarkoitettu ainoastaan henkilöille,
3.02.30 SÄÄTÖKARAMOOTTORIT. Käyttökohteet: Ilmastointipellit Dieselmoottorit Venttiilit Ikkunat ja luukut Voimat 1000N asti 04.99
 3.02.30 SÄÄTÖKARAMOOTTORIT Käyttökohteet: Ilmastointipellit Dieselmoottorit Venttiilit Ikkunat ja luukut Voimat 1000N asti 04.99 1 RAKENNE MAGPUSH-karamoottorin rakenne on erittäin yksinkertainen. Moottorina
3.02.30 SÄÄTÖKARAMOOTTORIT Käyttökohteet: Ilmastointipellit Dieselmoottorit Venttiilit Ikkunat ja luukut Voimat 1000N asti 04.99 1 RAKENNE MAGPUSH-karamoottorin rakenne on erittäin yksinkertainen. Moottorina
33 SOLENOIDIN JA TOROIDIN MAGNEETTIKENTTÄ
 TYÖOHJE 14.7.2010 JMK, TSU 33 SOLENOIDIN JA TOROIDIN MAGNEETTIKENTTÄ Laitteisto: Kuva 1. Kytkentä solenoidin ja toroidin magneettikenttien mittausta varten. Käytä samaa digitaalista jännitemittaria molempien
TYÖOHJE 14.7.2010 JMK, TSU 33 SOLENOIDIN JA TOROIDIN MAGNEETTIKENTTÄ Laitteisto: Kuva 1. Kytkentä solenoidin ja toroidin magneettikenttien mittausta varten. Käytä samaa digitaalista jännitemittaria molempien
KÄYTTÖOHJE SAHAUSPÖYTÄ. Malli: 010A
 KÄYTTÖOHJE SAHAUSPÖYTÄ Malli: 010A Sisällysluettelo Tekniset tiedot... 2 Pakkauksen sisältö... 3 Turvaohjeet... 3 Kokoamisohje... 4 Osien esittely... 7 Pituuden säätö sivuttaistuen... 8 Korkeussäätö sivutuki...
KÄYTTÖOHJE SAHAUSPÖYTÄ Malli: 010A Sisällysluettelo Tekniset tiedot... 2 Pakkauksen sisältö... 3 Turvaohjeet... 3 Kokoamisohje... 4 Osien esittely... 7 Pituuden säätö sivuttaistuen... 8 Korkeussäätö sivutuki...
Kirami CUBE Ulkopuolinen lämmityskamiina Käyttöohjeet
 Kirami CUBE Ulkopuolinen lämmityskamiina Käyttöohjeet Kamiinan tekniset tiedot: Merialumiininen kamiina (AlMg3) Valurautainen rosti x 2, umpirosti x 1 Tulipesäluukku, jossa teräksinen sisäosa Sisällä vesikiertoputket
Kirami CUBE Ulkopuolinen lämmityskamiina Käyttöohjeet Kamiinan tekniset tiedot: Merialumiininen kamiina (AlMg3) Valurautainen rosti x 2, umpirosti x 1 Tulipesäluukku, jossa teräksinen sisäosa Sisällä vesikiertoputket
on radan suuntaiseen komponentti eli tangenttikomponentti ja on radan kaarevuuskeskipisteeseen osoittavaan komponentti. (ks. kuva 1).
.") H E I L U R I T 1) Matemaattinen heiluri = painottoman langan päässä heilahteleva massapiste (ks. kuva1) kuva 1. - heilurin pituus l - tasapainoasema O - ääriasemat A ja B - heilahduskulma - heilahdusaika
H E I L U R I T 1) Matemaattinen heiluri = painottoman langan päässä heilahteleva massapiste (ks. kuva1) kuva 1. - heilurin pituus l - tasapainoasema O - ääriasemat A ja B - heilahduskulma - heilahdusaika
c) Määritä paraabelin yhtälö, kun tiedetään, että sen huippu on y-akselilla korkeudella 6 ja sen nollakohdat ovat x-akselin kohdissa x=-2 ja x=2.
 Määritä paraabelin yhtälö, kun tiedetään, että sen huippu on y-akselilla korkeudella 6 ja sen nollakohdat ovat x-akselin kohdissa x=-2 ja x=2.") MAA4 Koe 5.5.01 Jussi Tyni Kaikkiin tehtäviin ratkaisujen välivaiheet näkyviin! Ota kokeesta poistuessasi tämä paperi mukaasi! Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Valitse
MAA4 Koe 5.5.01 Jussi Tyni Kaikkiin tehtäviin ratkaisujen välivaiheet näkyviin! Ota kokeesta poistuessasi tämä paperi mukaasi! Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Valitse
Kun pallojen keskipisteet yhdistetään, muodostuu neliöpohjainen, suora pyramidi (kuva 3), jonka sivusärmien pituudet ovat 2 pallon säde eli 2 1 = 2.
, jonka sivusärmien pituudet ovat 2 pallon säde eli 2 1 = 2.") Hyvän ratkaisun piirteitä: a) Neliöpohjainen rakennelma Kun pallojen keskipisteet yhdistetään, muodostuu neliöpohjainen, suora pyramidi (kuva ), jonka sivusärmien pituudet ovat 2 pallon säde eli 2 1 =
Hyvän ratkaisun piirteitä: a) Neliöpohjainen rakennelma Kun pallojen keskipisteet yhdistetään, muodostuu neliöpohjainen, suora pyramidi (kuva ), jonka sivusärmien pituudet ovat 2 pallon säde eli 2 1 =
Suorita vaihtaminen seuraavassa järjestyksessä:
 Suorita vaihtaminen seuraavassa järjestyksessä: 1 Vaihda molemmat iskunvaimentimet samaan aikaan Volkswagen Golf V autosi korjaustöissä. 2 Kiristä seisontajarrun vaijeri 3 Aseta kiilapalikat taka pyörien
Suorita vaihtaminen seuraavassa järjestyksessä: 1 Vaihda molemmat iskunvaimentimet samaan aikaan Volkswagen Golf V autosi korjaustöissä. 2 Kiristä seisontajarrun vaijeri 3 Aseta kiilapalikat taka pyörien
Apurunkorakenne. Lisätietoja alustarungoista on annettu asiakirjassa Alustarungot.
 Yleistä Yleistä Apurunkoa voidaan käyttää seuraaviin tehtäviin: Se antaa vapaan tilan pyörien ja muiden rungosta ulkonevien osien välille. Se tuo jäykkyyttä ja vähentää rasituksia takaylityksessä. Se suojaa
Yleistä Yleistä Apurunkoa voidaan käyttää seuraaviin tehtäviin: Se antaa vapaan tilan pyörien ja muiden rungosta ulkonevien osien välille. Se tuo jäykkyyttä ja vähentää rasituksia takaylityksessä. Se suojaa
1.1.2013 Suomen Euromaster Oy pidättää oikeuden huoltotyöhinnaston hinnanmuutoksiin.
 HUOLTOTYÖ- HINNASTO Suomen Euromaster Oy pidättää oikeuden huoltotyöhinnaston hinnanmuutoksiin. HENKILÖAUTOT HUOLTOTÖIDEN YHDISTELMÄT (EUROMASTERIN VÄLITTÄMIIN TUOTTEISIIN) Normaalivanne Tuote- Nimike
HUOLTOTYÖ- HINNASTO Suomen Euromaster Oy pidättää oikeuden huoltotyöhinnaston hinnanmuutoksiin. HENKILÖAUTOT HUOLTOTÖIDEN YHDISTELMÄT (EUROMASTERIN VÄLITTÄMIIN TUOTTEISIIN) Normaalivanne Tuote- Nimike
Matematiikan taito 9, RATKAISUT. , jolloin. . Vast. ]0,2] arvot.
![Matematiikan taito 9, RATKAISUT. , jolloin. . Vast. ]0,2] arvot.](/thumbs/61/46046056.jpg "Matematiikan taito 9, RATKAISUT. , jolloin. . Vast. ]0,2] arvot.") 7 Sovelluksia 90 a) Koska sin saa kaikki välillä [,] olevat arvot, niin funktion f ( ) = sin pienin arvo on = ja suurin arvo on ( ) = b) Koska sin saa kaikki välillä [0,] olevat arvot, niin funktion f
7 Sovelluksia 90 a) Koska sin saa kaikki välillä [,] olevat arvot, niin funktion f ( ) = sin pienin arvo on = ja suurin arvo on ( ) = b) Koska sin saa kaikki välillä [0,] olevat arvot, niin funktion f
Asennus. Vaihtojarrusarja Twister - tai Workman -työajoneuvo VAARA. Irralliset osat. Asennusohjeet
 Vaihtojarrusarja Twister - tai Workman -työajoneuvo Mallinro: 136-1199 Form No. 3407-726 Rev A Asennusohjeet VAARA KALIFORNIA Lakiesityksen 65 mukainen varoitus Tämä tuote sisältää kemikaaleja, jotka Kalifornian
Vaihtojarrusarja Twister - tai Workman -työajoneuvo Mallinro: 136-1199 Form No. 3407-726 Rev A Asennusohjeet VAARA KALIFORNIA Lakiesityksen 65 mukainen varoitus Tämä tuote sisältää kemikaaleja, jotka Kalifornian
Auton säätäminen & Systemaattinen testaaminen. Henri Niskanen & Kalle Jokinen
 Auton säätäminen & Systemaattinen testaaminen Henri Niskanen & Kalle Jokinen Ajoasento ja penkin paikka Peruslähtökohtana tehtaan antamat mitat, unohtamatta sitä että kuskilla on hyvä ja luonnollinen ajoasento,
Auton säätäminen & Systemaattinen testaaminen Henri Niskanen & Kalle Jokinen Ajoasento ja penkin paikka Peruslähtökohtana tehtaan antamat mitat, unohtamatta sitä että kuskilla on hyvä ja luonnollinen ajoasento,
Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Lue ohjeet huolellisesti!
 MAA3 Koe 1.4.2014 Jussi Tyni Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Lue ohjeet huolellisesti! A-Osio: Ei saa käyttää laskinta. MAOL saa olla alusta asti käytössä. Maksimissaan
MAA3 Koe 1.4.2014 Jussi Tyni Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Lue ohjeet huolellisesti! A-Osio: Ei saa käyttää laskinta. MAOL saa olla alusta asti käytössä. Maksimissaan
4. Kertausosa. 1. a) 12
 12") . Kertausosa. a kun, : b kun, tai 8 . Paraabeli y a bc c aukeaa ylöspäin, jos a alaspäin, jos a a Funktion g kuvaaja on paraabeli, jolle a. Se aukeaa ylöspäin. b Funktion g kuvaaja on paraabeli, jolle
. Kertausosa. a kun, : b kun, tai 8 . Paraabeli y a bc c aukeaa ylöspäin, jos a alaspäin, jos a a Funktion g kuvaaja on paraabeli, jolle a. Se aukeaa ylöspäin. b Funktion g kuvaaja on paraabeli, jolle
[MATEMATIIKKA, KURSSI 8]
![[MATEMATIIKKA, KURSSI 8]](/thumbs/30/14370320.jpg "[MATEMATIIKKA, KURSSI 8]") 2015 Puustinen, Sinn PYK [MATEMATIIKKA, KURSSI 8] Trigometrian ja avaruusgeometrian teoriaa, tehtäviä ja linkkejä peruskoululaisille Sisällysluettelo 8.1 PYTHAGORAAN LAUSE... 3 8.1.1 JOHDANTOTEHTÄVÄT 1-6...
2015 Puustinen, Sinn PYK [MATEMATIIKKA, KURSSI 8] Trigometrian ja avaruusgeometrian teoriaa, tehtäviä ja linkkejä peruskoululaisille Sisällysluettelo 8.1 PYTHAGORAAN LAUSE... 3 8.1.1 JOHDANTOTEHTÄVÄT 1-6...
dametric AGS-anturi HUOLTOKÄSIKIRJA AGS-XXX Service Manual FI.docx Lokakuu 12, 2010 / BL Sivu 1 (8)
") dametric AGS-anturi AGS-XXX Service Manual FI.docx Lokakuu 12, 2010 / BL Sivu 1 (8) Sisältö 1 Yleistä... 2 2 Anturin asennus ja poisto... 3 3 Kotelon ja putken välinen liitos... 4 4 Kärjen ja kotelon välinen
dametric AGS-anturi AGS-XXX Service Manual FI.docx Lokakuu 12, 2010 / BL Sivu 1 (8) Sisältö 1 Yleistä... 2 2 Anturin asennus ja poisto... 3 3 Kotelon ja putken välinen liitos... 4 4 Kärjen ja kotelon välinen
OHJAUS / RIPUSTUS T-1
 T-1 >67 C. D. A. I. J. B. T-1 68> G. H. E. K. L. F. 4192-1 4192-5 OHJAUS / RIPUSTUS T-1 RAIDETANGON PÄÄT A. 4192-1 T-1-68 ulompi vasen B. 4192-2 T-1-68 ulompi oikea C. 4192-5 T-1-68 sisempi vasen D. 4192-6
T-1 >67 C. D. A. I. J. B. T-1 68> G. H. E. K. L. F. 4192-1 4192-5 OHJAUS / RIPUSTUS T-1 RAIDETANGON PÄÄT A. 4192-1 T-1-68 ulompi vasen B. 4192-2 T-1-68 ulompi oikea C. 4192-5 T-1-68 sisempi vasen D. 4192-6
SILVER LINE AKSELISTON SUUNTAUSJÄRJESTELMÄ
 SILVER LINE AKSELISTON SUUNTAUSJÄRJESTELMÄ JOHDANTOSIVU TRUCKCAM ESITTELEE SILVER LINE -järjestelmän. Tämä kompakti akseliston suuntausjärjestelmä antaa rekka- ja linja-auto- sekä rengaskorjaamoille mahdollisuuden
SILVER LINE AKSELISTON SUUNTAUSJÄRJESTELMÄ JOHDANTOSIVU TRUCKCAM ESITTELEE SILVER LINE -järjestelmän. Tämä kompakti akseliston suuntausjärjestelmä antaa rekka- ja linja-auto- sekä rengaskorjaamoille mahdollisuuden
359 007 Ersatzradhalter c
 359 007 Ersatzradhalter c 5 1 2 6 3 4 7 Hersteller / Manufacturer / Fabricant / Costruttore / Fabricante: Alois Kober GmbH, Maschinenfabrik, D-89359 Kötz, Germany Telefon (0 82 21) 970 email: fahrzeugtechnik@al-ko.de
359 007 Ersatzradhalter c 5 1 2 6 3 4 7 Hersteller / Manufacturer / Fabricant / Costruttore / Fabricante: Alois Kober GmbH, Maschinenfabrik, D-89359 Kötz, Germany Telefon (0 82 21) 970 email: fahrzeugtechnik@al-ko.de
Jännite, virran voimakkuus ja teho
 Jukka Kinkamo, OH2JIN oh2jin@oh3ac.fi +358 44 965 2689 Jännite, virran voimakkuus ja teho Jännite eli potentiaaliero mitataan impedanssin yli esiintyvän jännitehäviön avulla. Koska käytännön radioamatöörin
Jukka Kinkamo, OH2JIN oh2jin@oh3ac.fi +358 44 965 2689 Jännite, virran voimakkuus ja teho Jännite eli potentiaaliero mitataan impedanssin yli esiintyvän jännitehäviön avulla. Koska käytännön radioamatöörin
Installation instructions, accessories. Urheilualustasarja, eteen ja taakse
 Installation instructions, accessories Ohje nro 9172512 Versio 1.1 Osa nro Urheilualustasarja, eteen ja taakse Volvo Car Corporation Urheilualustasarja, eteen ja taakse- 9172512 - V1.1 Sivu 1 / 23 Varuste
Installation instructions, accessories Ohje nro 9172512 Versio 1.1 Osa nro Urheilualustasarja, eteen ja taakse Volvo Car Corporation Urheilualustasarja, eteen ja taakse- 9172512 - V1.1 Sivu 1 / 23 Varuste
Urheilualustasarja, eteen ja taakse
 Installation instructions, accessories Ohje nro 9172512 Versio 1.1 Osa nro Urheilualustasarja, eteen ja taakse Volvo Car Corporation Urheilualustasarja, eteen ja taakse- 9172512 - V1.1 Sivu 1 / 19 Varuste
Installation instructions, accessories Ohje nro 9172512 Versio 1.1 Osa nro Urheilualustasarja, eteen ja taakse Volvo Car Corporation Urheilualustasarja, eteen ja taakse- 9172512 - V1.1 Sivu 1 / 19 Varuste
Kertaus. Integraalifunktio ja integrointi. 2( x 1) 1 2x. 3( x 1) 1 (3x 1) KERTAUSTEHTÄVIÄ. K1. a)
 1 2x. 3( x 1) 1 (3x 1) KERTAUSTEHTÄVIÄ. K1. a)") Juuri 9 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 5.5.6 Kertaus Integraalifunktio ja integrointi KERTAUSTEHTÄVIÄ K. a) ( )d C C b) c) d e e C cosd cosd sin C K. Funktiot F ja F ovat saman
Juuri 9 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 5.5.6 Kertaus Integraalifunktio ja integrointi KERTAUSTEHTÄVIÄ K. a) ( )d C C b) c) d e e C cosd cosd sin C K. Funktiot F ja F ovat saman
235. 236. 237. 238. 239. 240. 241. 8. Sovellutuksia. 8.1. Pinta-alan ja tilavuuden laskeminen. 8.2. Keskiö ja hitausmomentti
 8. Sovellutuksia 8.1. Pinta-alan ja tilavuuden laskeminen 235. Laske sen kappaleen tilavuus, jota rajoittavat pinnat z = xy, x = y 2, z = 0, x = 1. (Kappale sijaitsee oktantissa x 0, y 0, z 0.) 1/6. 236.
8. Sovellutuksia 8.1. Pinta-alan ja tilavuuden laskeminen 235. Laske sen kappaleen tilavuus, jota rajoittavat pinnat z = xy, x = y 2, z = 0, x = 1. (Kappale sijaitsee oktantissa x 0, y 0, z 0.) 1/6. 236.
Suorita vaihtaminen seuraavassa järjestyksessä:
 Kuinka vaihtaa etujoustintuen laakeri Volkswagen Golf V malliin Suorita vaihtaminen seuraavassa järjestyksessä: 1 Kiristä seisontajarrun vaijeri 2 Aseta kiilapalikat taka pyörien alle. 3 4 Nosta auton
Kuinka vaihtaa etujoustintuen laakeri Volkswagen Golf V malliin Suorita vaihtaminen seuraavassa järjestyksessä: 1 Kiristä seisontajarrun vaijeri 2 Aseta kiilapalikat taka pyörien alle. 3 4 Nosta auton
Julkaisun laji Opinnäytetyö. Sivumäärä 43
 OPINNÄYTETYÖN KUVAILULEHTI Tekijä(t) SUKUNIMI, Etunimi ISOVIITA, Ilari LEHTONEN, Joni PELTOKANGAS, Johanna Työn nimi Julkaisun laji Opinnäytetyö Sivumäärä 43 Luottamuksellisuus ( ) saakka Päivämäärä 12.08.2010
OPINNÄYTETYÖN KUVAILULEHTI Tekijä(t) SUKUNIMI, Etunimi ISOVIITA, Ilari LEHTONEN, Joni PELTOKANGAS, Johanna Työn nimi Julkaisun laji Opinnäytetyö Sivumäärä 43 Luottamuksellisuus ( ) saakka Päivämäärä 12.08.2010
Ilmoitetut kantavuudet saavutetaan vain, kun kääntöpyörän runkolevy tukeutuu koko pintaalaltaan
 Kiinnityslevy Keskiöreikä Terästappi Kierretappi (Lisänimike: -GS...) Pyörä kiinnitetään tasaista pintaa vasten pulttien ja mutterien avulla. Reikävälit ovat standardoituja. tä on saatavana kääntö- ja
Kiinnityslevy Keskiöreikä Terästappi Kierretappi (Lisänimike: -GS...) Pyörä kiinnitetään tasaista pintaa vasten pulttien ja mutterien avulla. Reikävälit ovat standardoituja. tä on saatavana kääntö- ja
ja J r ovat vektoreita ja että niiden tulee olla otettu saman pyörimisakselin suhteen. Massapisteen hitausmomentti on
 FYSA210 / K1 HITAUSMOMENTTI Työn tavoitteena on opetella määrittämään kappaleen hitausmomentti kappaletta pyörittämällä ja samalla havainnollistaa kitkan vaikutusta. Massapisteinä toimivat keskipisteestään
FYSA210 / K1 HITAUSMOMENTTI Työn tavoitteena on opetella määrittämään kappaleen hitausmomentti kappaletta pyörittämällä ja samalla havainnollistaa kitkan vaikutusta. Massapisteinä toimivat keskipisteestään
Turvallisuus. Asennuksessa tarvittavat työkalut. Kuomun asentamisessa tarvitaan kaksi (2) henkilöä.
 henkilöä.") Kuomun asennusohje Turvallisuus Kuomun asentamisessa tarvitaan kaksi (2) henkilöä.! kuomun nostaminen, siirtäminen ja kääntäminen kevennysjousien asentaminen tuulihaan asentaminen varmistettava peräkärryn
Kuomun asennusohje Turvallisuus Kuomun asentamisessa tarvitaan kaksi (2) henkilöä.! kuomun nostaminen, siirtäminen ja kääntäminen kevennysjousien asentaminen tuulihaan asentaminen varmistettava peräkärryn
Kuva 104. Kehysten muotoilu. Kuva 105. Kehässä hiekkalistat
 10. Kaavauskehykset Raimo Keskinen, Pekka Niemi Tampereen ammattiopisto Kaavauskehysten päätehtävä on pitää sullottu muotti koossa. Muotin muodostaa useimmiten kaksi päällekkäin olevaa kehystä, joiden
10. Kaavauskehykset Raimo Keskinen, Pekka Niemi Tampereen ammattiopisto Kaavauskehysten päätehtävä on pitää sullottu muotti koossa. Muotin muodostaa useimmiten kaksi päällekkäin olevaa kehystä, joiden
TEKNISET TIEDOT. Volvo Trucks. Driving Progress. Vetopöytä ja asennus
 Volvo Trucks. Driving Progress TEKNISET TIEDOT Puoliperävaunu kytketään sitä vetävään kuorma-autoon vetopöydän avulla. Vetopöytä on tavallisesti kiinnitetty vetoauton alustaan asennuslevyn avulla. Saatavana
Volvo Trucks. Driving Progress TEKNISET TIEDOT Puoliperävaunu kytketään sitä vetävään kuorma-autoon vetopöydän avulla. Vetopöytä on tavallisesti kiinnitetty vetoauton alustaan asennuslevyn avulla. Saatavana
Valtioneuvoston asetus
 Valtioneuvoston asetus ajoneuvojen käytöstä tiellä annetun asetuksen muuttamisesta Valtioneuvoston päätöksen mukaisesti muutetaan ajoneuvojen käytöstä tiellä annetun valtioneuvoston asetuksen (1257/1992)
Valtioneuvoston asetus ajoneuvojen käytöstä tiellä annetun asetuksen muuttamisesta Valtioneuvoston päätöksen mukaisesti muutetaan ajoneuvojen käytöstä tiellä annetun valtioneuvoston asetuksen (1257/1992)
Säiliöautot. Yleistä tietoa säiliöautoista. Malli PGRT. Säiliöpäällirakennetta pidetään erityisen vääntöjäykkänä.
 Yleistä tietoa säiliöautoista Yleistä tietoa säiliöautoista Säiliöpäällirakennetta pidetään erityisen vääntöjäykkänä. Malli Akselivälin tulee olla mahdollisimman lyhyt, jotta rungon värähtelyjen vaara
Yleistä tietoa säiliöautoista Yleistä tietoa säiliöautoista Säiliöpäällirakennetta pidetään erityisen vääntöjäykkänä. Malli Akselivälin tulee olla mahdollisimman lyhyt, jotta rungon värähtelyjen vaara
MAB3 - Harjoitustehtävien ratkaisut:
 MAB - Harjoitustehtävien ratkaisut: Funktio. Piirretään koordinaatistoakselit ja sijoitetaan pisteet:. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä. Funktiolla
MAB - Harjoitustehtävien ratkaisut: Funktio. Piirretään koordinaatistoakselit ja sijoitetaan pisteet:. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä. Funktiolla
Harjoitustyö Hidastuva liike Biljardisimulaatio
 Harjoitustyö Hidastuva liike Biljardisimulaatio Tietotekniikka Ammattialan matemaattiset menetelmät Tommi Sukuvaara Nico Hätönen, Joni Toivonen, Tomi Poutiainen INTINU13A6 Arviointi Päiväys Arvosana Opettajan
Harjoitustyö Hidastuva liike Biljardisimulaatio Tietotekniikka Ammattialan matemaattiset menetelmät Tommi Sukuvaara Nico Hätönen, Joni Toivonen, Tomi Poutiainen INTINU13A6 Arviointi Päiväys Arvosana Opettajan
SISÄLTÖ Venymän käsite Liukuman käsite Venymä ja liukuma lujuusopin sovelluksissa
 SISÄLTÖ Venymän käsite Liukuman käsite Venymä ja liukuma lujuusopin sovelluksissa 1 SISÄLTÖ 1. Siirtymä 2 1 2.1 MUODONMUUTOS Muodonmuutos (deformaatio) Tapahtuu, kun kappaleeseen vaikuttaa voima/voimia
SISÄLTÖ Venymän käsite Liukuman käsite Venymä ja liukuma lujuusopin sovelluksissa 1 SISÄLTÖ 1. Siirtymä 2 1 2.1 MUODONMUUTOS Muodonmuutos (deformaatio) Tapahtuu, kun kappaleeseen vaikuttaa voima/voimia
JahtiJakt Prestige Taljajousi Asennettu ja peruskohdistettu setti
 JahtiJakt Prestige Taljajousi Asennettu ja peruskohdistettu setti Ostamasi taljajousisetti on lähes käyttövalmis. Jouseen on tehty valmiiksi seuraavat työvaiheet: 1. Taljajousen camit on säädetty ja ajoitettu
JahtiJakt Prestige Taljajousi Asennettu ja peruskohdistettu setti Ostamasi taljajousisetti on lähes käyttövalmis. Jouseen on tehty valmiiksi seuraavat työvaiheet: 1. Taljajousen camit on säädetty ja ajoitettu
F2000 Karavaanimarkiisi
 Asennus ja käyttöohjeet F2000 Karavaanimarkiisi Lue käyttöohjeet huolellisesti ennen käyttöä! Pakkauksen sisältö NIMIKE KUVAUS 1 Kankaan lukitustanko 2 putki 3 Vasen varsi 4 Oikea varsi 5 Seinäkiinnike
Asennus ja käyttöohjeet F2000 Karavaanimarkiisi Lue käyttöohjeet huolellisesti ennen käyttöä! Pakkauksen sisältö NIMIKE KUVAUS 1 Kankaan lukitustanko 2 putki 3 Vasen varsi 4 Oikea varsi 5 Seinäkiinnike
TUPLA-POTKUPYÖRÄ Omistajan Käsikirja
 TUPLA-POTKUPYÖRÄ Omistajan Käsikirja Takuuasiat, neuvonta ja varaosat: puh. 0201 222 600 asiakaspalvelu@bikeservice.fi KÄYTTÖÖNOTTO Uuden Solifer Tupla-Potkupyörän käyttöönotto on helppoa. Nosta pyörän
TUPLA-POTKUPYÖRÄ Omistajan Käsikirja Takuuasiat, neuvonta ja varaosat: puh. 0201 222 600 asiakaspalvelu@bikeservice.fi KÄYTTÖÖNOTTO Uuden Solifer Tupla-Potkupyörän käyttöönotto on helppoa. Nosta pyörän
CROSSKART-AJONEUVON ETUJOUSITUSGEOMETRIAN SUUNNITTELU JA MUUTOSTYÖ
 Opinnäytetyö (AMK) Auto- ja kuljetustekniikka Käyttöpainotteinen auto- ja kuljetustekniikka 2013 Toni Nieminen 0801375 CROSSKART-AJONEUVON ETUJOUSITUSGEOMETRIAN SUUNNITTELU JA MUUTOSTYÖ OPINNÄYTETYÖ (AMK)
Opinnäytetyö (AMK) Auto- ja kuljetustekniikka Käyttöpainotteinen auto- ja kuljetustekniikka 2013 Toni Nieminen 0801375 CROSSKART-AJONEUVON ETUJOUSITUSGEOMETRIAN SUUNNITTELU JA MUUTOSTYÖ OPINNÄYTETYÖ (AMK)
MAGNASYSTEM. Automaattinen pakokaasunpoistolaitteisto, joka on suunniteltu erityisesti paloasemia varten. Käyttäjäystävällinen, tehokas ja luotettava.
 MAGNASYSTEM Automaattinen pakokaasunpoistolaitteisto, joka on suunniteltu erityisesti paloasemia varten. Käyttäjäystävällinen, tehokas ja luotettava. Löydät toimivan ratkaisun riippumatta pakoputken sijoituksesta,
MAGNASYSTEM Automaattinen pakokaasunpoistolaitteisto, joka on suunniteltu erityisesti paloasemia varten. Käyttäjäystävällinen, tehokas ja luotettava. Löydät toimivan ratkaisun riippumatta pakoputken sijoituksesta,
Vektorit. Kertausta 12.3.2013 Seppo Lustig (Lähde: avoinoppikirja.fi)
") Vektorit Kertausta 12.3.2013 Seppo Lustig (Lähde: avoinoppikirja.fi) Sisällys Vektorit Nimeäminen Vektorien kertolasku Vektorien yhteenlasku Suuntasopimus Esimerkki: laivan nopeus Vektorit Vektoreilla
Vektorit Kertausta 12.3.2013 Seppo Lustig (Lähde: avoinoppikirja.fi) Sisällys Vektorit Nimeäminen Vektorien kertolasku Vektorien yhteenlasku Suuntasopimus Esimerkki: laivan nopeus Vektorit Vektoreilla
Teräskehäisten liukuovien asennusohje
 Teräskehäisten liukuovien asennusohje Asenna yläliukukisko kuvan. osoittamalla tavalla varjoura näkyvään suuntaan päin Aseta alaliukukisko lattialle. Oikea kohta on mm yläliukukiskon etureunasta alaliukukiskon
Teräskehäisten liukuovien asennusohje Asenna yläliukukisko kuvan. osoittamalla tavalla varjoura näkyvään suuntaan päin Aseta alaliukukisko lattialle. Oikea kohta on mm yläliukukiskon etureunasta alaliukukiskon
KJR-C1001: Statiikka L2 Luento : voiman momentti ja voimasysteemit
 KJR-C1001: Statiikka L2 Luento 21.2.2018: voiman momentti ja voimasysteemit Apulaisprofessori Konetekniikan laitos Luennon osaamistavoitteet Tämän päiväisen luennon jälkeen opiskelija Pystyy muodostamaan,
KJR-C1001: Statiikka L2 Luento 21.2.2018: voiman momentti ja voimasysteemit Apulaisprofessori Konetekniikan laitos Luennon osaamistavoitteet Tämän päiväisen luennon jälkeen opiskelija Pystyy muodostamaan,
6:2 6:3 6:4 6:5 7:1 7:2
 Manuaali Zitzi Flipper Pro FI1101-1 TM Zitzi Flipper Pro Kaasujousi Zitzi Flipper Pro Sähköinen Sisällysluettelo Zitzi Flipper Pro Alue nr 1 Manufaturer: 2010-03-26 2:1 Korkeussäätö - Kaasujousi 6:2 Yhteenveto
Manuaali Zitzi Flipper Pro FI1101-1 TM Zitzi Flipper Pro Kaasujousi Zitzi Flipper Pro Sähköinen Sisällysluettelo Zitzi Flipper Pro Alue nr 1 Manufaturer: 2010-03-26 2:1 Korkeussäätö - Kaasujousi 6:2 Yhteenveto
Vetolaitteet. Yleistä vetolaitteista PGRT
 Yleistä vetolaitteista Yleistä vetolaitteista Vetolaite on yhteinen nimi yhdelle tai monelle komponentille, jo(t)ka ajoneuvoon on asennettava, ennen kuin se voi vetää perävaunua. Vetolaitteen tarkoituksena
Yleistä vetolaitteista Yleistä vetolaitteista Vetolaite on yhteinen nimi yhdelle tai monelle komponentille, jo(t)ka ajoneuvoon on asennettava, ennen kuin se voi vetää perävaunua. Vetolaitteen tarkoituksena
Männyn laaturajojen integrointi runkokäyrän ennustamisessa. Laura Koskela Tampereen yliopisto 9.6.2003
 Männyn laaturajojen integrointi runkokäyrän ennustamisessa Laura Koskela Tampereen yliopisto 9.6.2003 Johdantoa Pohjoismaisen käytännön mukaan rungot katkaistaan tukeiksi jo metsässä. Katkonnan ohjauksessa
Männyn laaturajojen integrointi runkokäyrän ennustamisessa Laura Koskela Tampereen yliopisto 9.6.2003 Johdantoa Pohjoismaisen käytännön mukaan rungot katkaistaan tukeiksi jo metsässä. Katkonnan ohjauksessa
Karting-auton ajo-ominaisuudet
 Karting-auton ajo-ominaisuudet Karting-auton hyvät ajo-ominaisuudet voidaan listata esim. seuraavasti: se saavuttaa suuria sivuttaiskiihtyvyyksiä se on helppo ajaa se käyttäytyy kuljettajan mieleisesti
Karting-auton ajo-ominaisuudet Karting-auton hyvät ajo-ominaisuudet voidaan listata esim. seuraavasti: se saavuttaa suuria sivuttaiskiihtyvyyksiä se on helppo ajaa se käyttäytyy kuljettajan mieleisesti
Pyöräntuennan tilatarkastelu
 Ville Tuovinen Pyöräntuennan tilatarkastelu Metropolia Ammattikorkeakoulu Insinööri (AMK) Auto- ja kuljetustekniikka Insinöörityö 4.9.2014 Tiivistelmä Tekijä(t) Otsikko Sivumäärä Aika Ville Tuovinen Pyöräntuennan
Ville Tuovinen Pyöräntuennan tilatarkastelu Metropolia Ammattikorkeakoulu Insinööri (AMK) Auto- ja kuljetustekniikka Insinöörityö 4.9.2014 Tiivistelmä Tekijä(t) Otsikko Sivumäärä Aika Ville Tuovinen Pyöräntuennan
MOOTTORIPUKIT. VAUHTIPYÖRÄN LUKITUSKAPPALE Sopii sekä 6V että 12V vauhtipyöriin. 1911 Vauhtipyörän lukituskappale
 MOOTTORIPUKIT 1910-1 Työpenkille kiinnitettävät pukit. Kahta laatua josta HeavyDuty-malli on BUGPACKI'in valmistama tukeva laatutuote. 1910 Moottoripukki, HeavyDuty 1910-1 Moottoripukki BUGPACK'in valmistava
MOOTTORIPUKIT 1910-1 Työpenkille kiinnitettävät pukit. Kahta laatua josta HeavyDuty-malli on BUGPACKI'in valmistama tukeva laatutuote. 1910 Moottoripukki, HeavyDuty 1910-1 Moottoripukki BUGPACK'in valmistava
Koskee: Kaikkia Cessna 190- ja 195-lentokoneita lentotuntimäärästä riippumatta.
 M-määräyksen mukainen toimenpide on lentokoneen jatkuvan lentokelpoisuuden edellytyksenä. Suoritettu toimenpide on merkittävä lentokone, moottori- tai potkurikirjaan toimenpiteen laadun mukaan. 242. M-määräys
M-määräyksen mukainen toimenpide on lentokoneen jatkuvan lentokelpoisuuden edellytyksenä. Suoritettu toimenpide on merkittävä lentokone, moottori- tai potkurikirjaan toimenpiteen laadun mukaan. 242. M-määräys
Kuomun asennus- ja käyttöopas
 Kuomun asennus- ja käyttöopas Terhi-kuomu Majava ja Kärppä perävaunuihin Versio: Kuumasinkitylle saranasarjalle (ei maalattu) Saranan käyttöönotto: Vaiheittain 6/2009 alkaen Takuuehdot edellyttävät tämän
Kuomun asennus- ja käyttöopas Terhi-kuomu Majava ja Kärppä perävaunuihin Versio: Kuumasinkitylle saranasarjalle (ei maalattu) Saranan käyttöönotto: Vaiheittain 6/2009 alkaen Takuuehdot edellyttävät tämän
Suorakulmainen kolmio
 Suorakulmainen kolmio 1. Määritä terävä kulma α, β ja γ, kun sinα = 0,5782, cos β = 0,745 ja tanγ = 1,222. π 2. Määritä trigonometristen funktioiden sini, kosini ja tangentti, kun kulma α = ja 3 β = 73,2
Suorakulmainen kolmio 1. Määritä terävä kulma α, β ja γ, kun sinα = 0,5782, cos β = 0,745 ja tanγ = 1,222. π 2. Määritä trigonometristen funktioiden sini, kosini ja tangentti, kun kulma α = ja 3 β = 73,2
Takaovellisen lasikuitukuomun asennusohje
 Takaovellisen lasikuitukuomun asennusohje Versio 1.2 28.02.2011 S i v u 2 Sisältö Kuomun asennus perävaunuun... 3 1. Reikien poraaminen laitaan... 5 2. Vivuston kiinnitys kuomuun... 6 3. Koukkusalpojen,
Takaovellisen lasikuitukuomun asennusohje Versio 1.2 28.02.2011 S i v u 2 Sisältö Kuomun asennus perävaunuun... 3 1. Reikien poraaminen laitaan... 5 2. Vivuston kiinnitys kuomuun... 6 3. Koukkusalpojen,
y=-3x+2 y=2x-3 y=3x+2 x = = 6
 MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
MAA Koe, Arto Hekkanen ja Jussi Tyni 5.5.015 Loppukoe LASKE ILMAN LASKINTA. 1. Yhdistä kuvaaja ja sen yhtälö a) 3 b) 1 c) 5 d) Suoran yhtälö 1) y=3x ) 3x+y =0 3) x y 3=0 ) y= 3x 3 5) y= 3x 6) 3x y+=0 y=-3x+
A11-02 Infrapunasuodinautomatiikka kameralle
 A11-02 Infrapunasuodinautomatiikka kameralle Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo Sisällysluettelo 1. Projektityön tavoite
A11-02 Infrapunasuodinautomatiikka kameralle Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo Sisällysluettelo 1. Projektityön tavoite
Maksimit ja minimit 1/5 Sisältö ESITIEDOT: reaalifunktiot, derivaatta
 Maksimit ja minimit 1/5 Sisältö Funktion kasvavuus ja vähenevyys; paikalliset ääriarvot Jos derivoituvan reaalifunktion f derivaatta tietyssä pisteessä on positiivinen, f (x 0 ) > 0, niin funktion tangentti
Maksimit ja minimit 1/5 Sisältö Funktion kasvavuus ja vähenevyys; paikalliset ääriarvot Jos derivoituvan reaalifunktion f derivaatta tietyssä pisteessä on positiivinen, f (x 0 ) > 0, niin funktion tangentti