LASERKEILAUKSELLA RADAN KUNNOSSAPIDON LÄHTÖTIETOMALLI
|
|
|
- Kristiina Aho
- 6 vuotta sitten
- Katselukertoja:
Transkriptio
1 1 LASERKEILAUKSELLA RADAN KUNNOSSAPIDON LÄHTÖTIETOMALLI LIIKENNEVIRASTON AUTOMAATTISEN TIEDON TUOTANNON KOKEILU Destia Oy Mika Jaakkola, Oulu
2 2 ALKUSANAT Tämä raportti kertoo Liikenneviraston rahoittaman Digitaalisen tiedontuotannon pilotin Mobiililaserkeilauksella radan kunnossapidon lähtötietomalli toteuttamisesta ja tuloksista. Työhön ovat osallistuneet Liikennevirasto, Destia Oy, Geotrim Oy, Terrasolid Oy ja Sova3D Oy. Jouni Hytönen toimi pilotissa Liikenneviraston edustajana ja rata-asioiden asiantuntijana. Marko Jurmu Destia Rail Oy:stä toimi projektissa radan kunnossapidon asiantuntijana ja kehittämistarpeiden ideoijana. Mika Jaakkola Destia Oy:stä toimi pilottiprojektin vastuullisena vetäjänä. Teemu Mielonen Geotrim Oy:stä operoi Tuomioja-Raahe rataosuudella tehdyn mobiilaserkeilauksen yhteistyössä Destia Rail Oy:n kanssa. Kjell Tuominen Terrasolid Oy:stä vastasi laserdatan mallinnuksesta ja uusien toimintatapojen pilotoinnista. Petri Kokko Sova3D Oy:stä vastasi mallinnetun aineiston selainpohjaisista visualisoinneista. Olli Planting Destia Oy:stä testasi pistepilviaineiston hyödyntämistä tie- ja ratasuunnittelujärjestelmässä. Lisäksi useat Destian ratakunnossapidon asiantuntijat tekivät pilotissa testattujen työkalujen ja menetelmien kommentointia. Suuret kiitokset Liikennevirastolle projektin rahoittajana ja kaikille yhteistyökumppaneille hedelmällisestä yhteistyöstä pilotin toteutuksessa. Oulussa Mika Jaakkola
3 3 TIIVISTELMÄ Pilotissa tutkittiin ratakohteesta mobiilaserkeilauksella tuotetun pistepilvi- ja mallinnusmalliaineiston hyödyntämistä radan kunnossapidon tarpeisiin. Pilotin tavoitteena oli myös saada käsitys toimivista työkaluista ja menetelmistä mallinnetun aineiston hyödyntämiseksi kunnossapidossa ja suunnittelussa. Erityisesti panostettiin laserkeilausaineiston hyödyntämiseen radan haittapuiden ja näkemien kartoituksessa. Tuomioja-Raahe rataosuuden mobiililaserkeilaus toteutettiin Destian ja Geotrimin yhteistyönä. Pistepilviaineiston mallinnus tehtiin Terrasolidin toimesta. Mallien visualisointia selainympäristössä Sova3D:n työnä ja edelleen pistepilvimallien hyödyntämiskokeiluja Tekla Civil suunnittelujärjestelmässä Destian tekemänä. Pilotin kokemusten mukaan mobiililaserkeilauksella tuotettu pistepilvimalli ja testatut Pistepilvimallin tarkkuuden ja kattavuuden havaittiin riittävän hyvin radan kunnossapidon lähtötietomallin perusaineistoksi. Pilotissa käytetyt mallinnus- ja visualisointityökalut soveltuivat hyvin radan haittapuiden ja tasoristeysnäkemien kartoitukseen ja havainnolliseen esittämiseen. Jopa yksittäisten haittapuiden rungot onnistuttiin mallintamaan. Mallinnuksen tuloksena tunnistettiin myös sähköratavarusteiden ja tekniikkakaappien paikka- ja mittatiedot sekä pilotoitiin ratasepelin tukikerroksen vajauksen laskentaa. Mallien esittäminen selainpohjaisessa järjestelmässä toimii hyvin harvennettujen pistepilvilmallien ja vektoroitujen aineistojen osalta. Mittauksen tuottamat pistepilvet ovat liian suuria selainkäyttöön. Pistepilviaineiston mallinnuksen osaaminen ja mallinnettavien kohteiden siirto visualisointityökaluun pienempinä kokonaisuuksina on jatkokäytön kannalta tarpeellista. Oulussa 6. maaliskuuta 2018 Mika Jaakkola
4 4 SISÄLLYS 1 JOHDANTO 1.1 Tausta 1.2 Pilottikohde 1.3 Tavoite 2 MOBIILILASERKEILAUS RATAOSUUDELLA 2.1 Mobiililaserkeilauksen suunnittelu 2.2 Maastomittaukset 2.3 Ratakohteen mobiilikartoitus 2.4 Laserkeilausdatan mallinnus 3 LASERKEILAUSDATAN TESTAUS 3.1 Laserdata hyödyntäminen väyläsuunnittelujärjestelmässä 3.2 Laserdatan visualisointi selainpohjaisessa järjestelmässä 4 JOHTOPÄÄTÖKSET 4.1 Hyödyntäminen radan kunnossapidossa 4.2 Ehdotus jatkotoimiksi

5 5 1 JOHDANTO Tausta ja tavoite Tähän asti radan kunnossapitourakoiden ongelma on ollut, että urakan alkaessa lähtötiedot ovat hajallaan erilaisissa järjestelmissä ja taulukoissa. Myös lähtötiedon tarkkuus ei ole usein riittävällä tasolla. Mittausteknologiana mobiililaserkeilaus on kehittynyt nopeasti ja mahdollistaa aiempaa kattavamman ja tehokkaamman lähtötietojen kartoituksen. Mittausaineistoja on myös mahdollista tarkastella pilvipalvelutyökaluilla aiempaa joustavammin ilman erillisiä ohjelmistoasennuksia. Kokeilussa kehitetään mittausta maastossa, mittausaineiston jalostamista ja sen kautta saatavien lopputuotteiden hyödyntämistä. Mobiililaserkeilaus on yleisesti toimivaksi todettu mittausteknologiaksi, mistä johtuen kokeilussa painotetaan mittausaineiston jalostusta ja lopputuotteiden hyödyntämistä radan kunnossapidon tarpeet huomioiden. Kokeilun tavoitteena on kehittää menetelmää, jonka päämääränä on tuottaa radan kunnossapitourakan tarpeisiin soveltuva lähtötietoaineisto mobiililaserkeilausta hyödyntäen. 2 MOBIILILASERKEILAUS RATAOSUUDELLA 2.1 Mobiililaserkeilauksen suunnittelu Radan kunnossapidon lähtötietomallin tietosisältötarpeet täsmennettiin yhteistyössä urakoitsijan, tilaajan ja mittausasiantuntijoiden kanssa. Kartoitettaviksi asioiksi tunnistettiin riskipuusto, ratapenkereen maastomalli, tasoristeysalueiden näkemät, avoimen tilan ulottuma (ATU) ja rataturvavarusteiden paikkatiedot. Koekohteeksi valittiin Tuomioja Raahe rataosuus ja mahdollinen jatko Raahe-Rautaruukki välille. Kuva 1. Koekohteeksi valittu Tuomioja-Raahe-Rautaruukki rataosuus.

6 6 2.2 Maastomittaukset Rataosuudelle Tuomioja-Raahe tehtiin signalointisuunnitelma. Signaaleja tehtiin 24 kpl ja signaalien paikoiksi valittiin tekniikkakaapit ja ratapylväiden betoniperustukset. Signaalit maalattiin sapluuna käyttäen kaappien ja jalustojen pintoihin, signaalit valokuvattiin ja niiden paikkatiedot kartoitettiin RTK-GNSS ja takymetrimittauksena. Liittessä 1 on esitetty signalointisuunnitelma ja signaalien koordinaattitiedot. Kuva 2. Ratapylvään betoniperustukseen maalattu signaalikuvio. 2.3 Ratakohteen mobiilikartoitus Mobiilikartoitusjärjestelmän kuvaus: Mobiilikartoitus tehtiin Geotrim Oy:n toimesta pakettiautoon asennetulla Trimble MX8 mobiilikeilaimella. Mittaus tehtiin Destian veturin vetämällä vaunulla, jonka päälle mittausauto oli pysäköity. Mobiililaserkeilain on pakettiautoon integroitu mobiilikartoitusjärjestelmä, jossa laserkeilain ja kameratekniikka on yhdistettynä samaan kalibroituun runkoon. Ajoneuvon liikkuessa kaksi 360 -laserkeilainta sekä kamerajärjestelmät keräävät 3D-dataa järjestelmää ympäröivästä alueesta. Paikannuksen tarkkuuden varmistaa liikkuvaan kartoitukseen suunniteltu Applanix POS LV paikannusjärjestelmä, ja tiedonkeruun laadunvalvonta tehdään POSView ja Trimble Trident Capture -ohjelmistoilla. Järjestelmän kaikkien sensorien mittaukset ovat synkronisoitu millisekunnin tarkkuudella Trimble Multiplexer -ajastusjärjestelmän avulla. Mobiilikartoituksessa käytettyjen kahden laserkeilaimen asetuksena oli pistettä/sekunti/laserkeilain ja 4 m kuvanottoväli. Mobiilikartoitus toteutettiin Tuomioja-Raahe-Rautaruukki rataosuudella
7 7 Mittausjärjestelmän operoijana toimi Teemu Mielonen (Geotrim Oy) ja tarkkailijana Mika Jaakkola (Destia Oy). Mobiilkartoituksen vaiheet: Alustus Mobiilikartoituksen tiedonkeruuvaihe alkoi alustuksella. Alustus tarkoittaa paikannustiedon keräämistä staattisessa tilassa. Alustus tehtiin avoimessa paikassa, missä on hyvä satelliittinäkyvyys. Alustus kesti noin viisi minuuttia. Mobiilikartoisuksen alustus tehtiin lähellä Tuomiojan asemaa. Kohdealueen kartoitus Alustuksen jälkeen aloitettiin datan (pistepilvet ja kuvia) kerääminen. Mobiilikartoituksen aikana ajonopeus oli noin km/h. Kohdealue kartoitettiin molempiin suuntiin ja lisäksi ajoimme SSAB:n tehdasalueen ympäri Raahessa. Mobiilikartoituksen aikana pysähdyimme välillä, lopetimme aineiston talletuksen, peruutimme noin m ja jatkoimme matkaa eteenpäin aineistoa tallentaen. Tämä menetelmällä minimoimme aineiston laatuun aiheutuvia riskejä, joita voivat aiheuttaa mahdolliset laitteistovirheet, navigointiaineiston laatu tai muut ulkopuoliset ennakoimattomat tilanteet mittauksen yhteydessä. SSAB:n tehdasalueella pysähdyksiä on runsaasti. Pysähdykset johtuivat kiskojen vaihteiden kääntämisistä ja paikoitellen rautatien heikko kunto vaati pieniä pysähdyksiä tai erittäin hidasta ajonopeutta. Tavallisesti on suositeltavaa keskeyttää aineiston talletus pysähdysten ajaksi, peruuttaa ja jatkaa tallennusta, mutta tehdasalueen tapauksessa aineiston tallennus oli koko ajan päällä, jotta mobiilikartoitus voitiin suorittaa mahdollisimman sujuvasti järkevässä ajassa. Alustus mittauksen loppuessa Kohdealueen kartoituksen jälkeen tehtiin samanlainen alustus kuin mittauksen alussa; kerätään paikannustietoa avarassa paikassa, missä on hyvä satelliittinäkyvyys. Alustus kesti noin viisi minuuttia. Alustus tehtiin jälleen lähellä Tuomiojan asemaa. Mobiilikartoituksen tiedonkeruuvaihe kesti kokonaisuudessaan 4 tuntia 3 minuuttia. Käsittelemättömän mobiiliaineiston koko on noin 225 Gb. Sääolosuhteet olivat hyvät mobiilikartoituksen aikana ja rautatiellä liikkuminen oli järjestetty sekä toteutettu Destia Rail Oy:n toimesta erinomaisesti mobiilikartoituksen kannalta. Mobiiliaineiston alkuprosessointi tehtiin Geotrim Oy:n toimesta, minkä yksityiskohtaisempi kuvaus on esitetty liitteessä 2. Geotrim Oy toimitti pistepilviaineiston LAS 1.2 formaatissa ja ETRS-GK24 (FIN2005N00) koordinaatistossa Terrasolidin käyttöön jatkojalostusta varten. Aineisto toimitettiin ulkoisella kovalevyllä, joka sisältää myös mobiilikartoituksen aikana kerätyn raakaaineiston.
8 8 PROSESSOINNIN KUVAUS JA KÄYTETYT OHJELMAT 1. Paikannustiedon jälkiprosessointi Applanixin paikannusjärjestelmä tallentaa paikannustiedon erilliselle USB-tikulle. Paikannustieto prosessoidaan Applanix POSPac MMS -ohjelmistolla reaaliaikaisen paikannustarkkuuden parantamiseksi. Tulokseksi saadaan prosessoitu ajorataratkaisu (sbet). POSPac MMS -ohjelmaan ladataan, mobiilikartoituksen aikana kerätyn paikannustiedon lisäksi, tukiasemadataa Trimnet GPS/GNSS -palvelusta sekä tarkemmat ratatiedot satelliiteille. Tukiasemien ja tarkkojen satelliittien ratatietojen avulla parannetaan mobiilikartoitusajon ajoradan sijainnin tarkkuutta. Prosessi yhdistää GNSS aineiston ja inertia-aineiston Kalman-suodin algoritmilla. Alla on esitetty ajorataratkaisun suhteelliset tarkkuudet (RMS) ajan funktiona. Suhteelliset sijaintitarkkuudet (X, Y & Z) ovat hyviä. Tyypillisesti avoimella alueella päästään alle 3 cm suhteelliseen tarkkuuteen korkeudessa ja alle 2 cm tarkkuuteen tasokomponenteissa. Kuvaajassa olevat piikit johtuvat katvealueista (tai jyrkistä käännöksistä maantiehankkeissa). Virhepiikkejä tulee yleensä useita mobiilikartoitusajon aikana, mutta tämän ratahankkeen maasto oli melko avointa koko projektialueella. Suurimmat katvealueet olivat tehdasalueen ympäristössä tässä projektissa. Inertiajärjestelmän kulmatarkkuudet ovat myös hyvällä tasolla. Roll ja pitch -kulmien tarkkuuksissa päästään normaalisti maantiekartoituksissa 0,5 kaariminuutin alle ja heading-kulma on yleensä alle 2 kaariminuuttia. Tässä laskennassa on päästy roll ja pitch -kulmien tarkuuksissa noin 0,4 kaariminuuttiin (0,0067 astetta), mikä on hyvä tulos. Heading kulman tarkkuus on pääosin vajaa 3 kaariminuuttia (0,050 astetta), mikä on hyvä tulos rautatiehankkeessa. Rautatiehankkeiden luonteesta johtuen heading-kulman tarkkuus on aina heikompi kuin tiehankkeissa, mutta 3 kaariminuutin tarkkuus ei olisi millään tapaan hälyttävän huono edes normaalissa tiehankkeessa.
9 9 2. Pistepilven ja kuvien paikannustiedon päivittäminen prosessoidulla ajoradalla Pistepilvelle ja kuville luodaan sbet-ajorataratkaisun perusteella omat paikannustiedot (.gps). Tähän käytetään Trimble Trident -ohjelmaa. 3. Pistepilven pisteiden uusien sijaintien laskeminen ja aineiston eksportointi Jälkiprosessoidun paikannustiedon perusteella laskettiin pistepilven pisteille uudet sijainnit. Tämän jälkeen suoritettiin aineiston visuaalisesti tarkastus. Kahden erillisten talletusten (vastakkaiset ajosuunnat) pistepilvien välinen korkeusero oli tyypillisesti 5 10 cm luokkaa. Tavallisesti mobiilikartoituksessa eri ajolinjojen välisten pistepilvien korkeuserot ovat 5-20 cm luokkaa tai katveisilla alueilla jopa suuremmat, joten tulosta voidaan pitää normaalina tai hyvänä. Eri ajolinjojen välisten pistepilvien ero tasossa oli muutaman senttimetrin luokkaa. Lopuksi eksportoitiin pistepilvi LAS 1.2 muotoon ja kuvat jpg-muotoon. Toimitetun aineiston tiedot liitteessä 2. PILOTISSA HAVAITTU VIRHEET & HUOMAUTUKSET Mobiilikartoitusauto ajettiin ennen mobiilikartoitusta veturilla vedettävälle lavetille. Auto ajettiin lavetin takareunaaan, mutta silti vasemman puoleisen laserkeilaimen keräämä pistepilvidata osui hieman lavetin nurkkaan. Tästä johtuen vasemman laserkeilaimen tallentamissa pistepilvissä puuttuu reilun 10 cm kaistale pisteaineistoa maan pinnasta ja kyseinen kaistale leijuu ilmassa koko projektialueen matkalla. Leijuva lavetin nurkka on luokiteltu karkeasti 7 luokkaan (low point noise) las-tiedostoissa. Maan pinnasta puuttuva kaistele tulee katetuksi oikean puoleisen laserkeilaimen aineistolla, joten virhe ei ole kriittinen aineiston loppukäyttöä ajatellen. Tehdasalueen mobiilikartoitus oli haastavaa runsaiden pysähdyksien ja rautatien heikon kunnon johdosta. Luonnollisesti mobiilikartoitus suoritetaan järkevimmällä mahdollisella tavalla olosuhteet huomioiden, mutta aineiston jatkoprosessointi saattaa vaatia hieman enemmän työtä korkealaatuisen pistepilviaineiston tuottamiseksi. Referenssipisteiden erottaminen saattaa olla haasteellista pistepilviaineistoista. Jatkossa olisi suositeltavaa mitata referenssipisteet mobiilikartoitusjärjestelmän puoleiselle sivustalle. Liitteessä 2 mallinnuksesta tuotettuja kuvia Destian mittaamista referenssipisteistä. 2.4 Laserkeilausdatan mallinnus Terrasolid Oy:n Kjell Tuominen toteutti laserdatan jatkojalostuksen luokitelluksi ja mallinnetuksi pistepilviaineistoksi. Työssä käytetyt ohjelmat: TerraScan, Terramatch, TerraModeller ja TerraPhoto jotka olivat asennettu käyttämään alustana Bentley POWERDRAFT ohjelmistoa. Laserdatan käsittely aloitetaan aineiston sisään luvulla, tutustumisella ja perusluokittelulla. Mobiilialustalta tehtävän keilauksen eräs ominaispiirre on katveista johtuva GPS satelliittihavaintojen laadun nopeakin vaihtelu. Tätä ongelmaa yritetään yleensä ratkaista keilaamalla linjamaiset kohteet edestakaisin. Näin tehtiin myös tässä projektissa. Yksittäisen ajolinjan pistepilven pistetiheys oli riittävä joten kahden eri ajolinjan sovituksen jälkeen valittiin parempilaatuinen, Tuomiojalta Raaheen ajettu ajolinja, jonka ero tunnettuihin pisteisiin oli pienempi, suurimmillaan 0,089 m. Tämä ajolinja sovitettiin koordinaatistoon käyttäen edellä

10 10 mainittuja signaloituja pisteitä. Laserdata luokiteltiin penger, muun maanpinnan, matalaan, keskikorkeaan ja korkeaan kasvillisuuden ja johto pisteluokkiin. Mallinnuksen ensimmäisessä vaiheessa tehtiin kuvalistat keilauksen yhteydessä otetuista kuvista, joita käyttäen värjättiin pistepilvi. Kuva 3. Värjätty pistepilvi.

11 11 Kuva 4. Automaattisesti vektoroidut sähköratajohdot. Tämän jälkeen tehtiin radan sähköjohtojen automaattinen vektorointi. Johtovektorit ovat välttämättömiä haittapuuston luokittelussa. Haittapuiden luokittelussa käytettiin laskentaperiaatteena kohtisuoraan kaatuvan puun latvan etäisyyttä vertailtavaan objektiin 1 m:n turvaetäisyyden lisäyksellä. Haittapuut luokiteltiin pistepilviaineiston perusteella kolmeen ryhmään: Avoimen tilan ulottuman alueelle kaatuvat puut Kiskoille kaatuvat puut Sähköratajohtojen päälle kaatuvat puut


12 12 Kuva 5. Haittapuiden kaatumissäteet värein. Punaiset ovat sähköratajohtoihin ylettyvät puut, keltaiset ovat kiskoille ylettyviä puita ja turkoosit avoimen tilan ulottuman alueelle kaatuvat puut. Tasoristeysnäkymät määriteltiin RATO Tasoristeysten tekniset ohjeet (Liite 3) perusteella. Tasoristeyksissä määriteltiin myös risteävän tien korkeusmalli ja sen perusteella odotustason profiili. Tekniikkakaapit kuten sähkö- ja turvalaitekaapit digitoitiin pistepilvestä. Samoin tehtiin myös avoimen tilan ulottuman tulkinta pistepilvistä. Kuva 6. Risteävän tien keskilinja ja pituusleikkaus sekä näkemäsektoreiden rajaviivat.

13 13 Näkemäsektoreiden avulla voidaan luokitella kaikki näkemää haittaavat esteet. Näkemäsektorit mallinnettiin kuvassa seitsemän esitetyn mukaisesti. Kärkipiste sijoitettiin 480 m:n päähän risteävän tien ja radan leikkauspisteestä. Näkemäesteiden alueelle jäävät pisteet luokiteltiin omiin tiedostoihin. Kuva 7. Näkemäsektoreiden mallintamisen periaate. Kuva 8. Risteävän tien näkymä mallissa. Näkemäsektori vaalennettuna.
 ja rataturvavarusteiden paikkatiedot.")
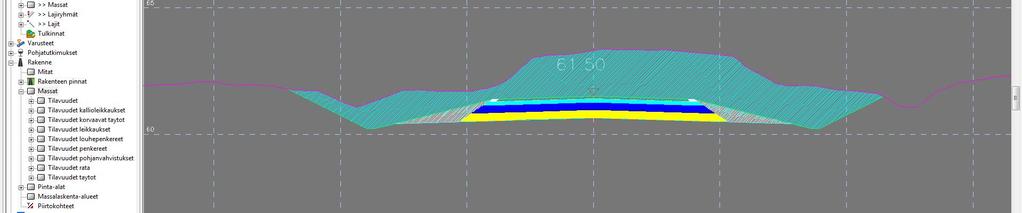
14 14 Kuva 9. Automaattisesti vektoroidut turvalaitekaapit. Kartoitettaviksi asioiksi tunnistettiin riskipuusto, ratapenkereen maastomalli, tasoristeysalueiden näkemät, avoimen tilan ulottuma (ATU) ja rataturvavarusteiden paikkatiedot. Pistepilvimallin laajat hyödyntämismahdollisuudet Alussa kartoitettaviksi asioiksi tunnistettujen asioiden lisäksi mallintamisen aikana havaittiin, että rata-alueen pistepilviaineistosta voidaan kartoittaa myös muita kunnossapidon kannalta hyödyllisiä asioita. Näitä olivat ratasepelin vajaukset ja ratakilometripylväät. Tukikerroksen ratasepelin lisäystarpeen laskentaan muodostettiin vertailupinta, joka tehtiin käyttäen automaattisesti tulkittujen kiskojen yläpintaa. Kiskojen vektoreista muodostetaan betoniratapölkkyjen tyyppipoikkileikkauksen mukaisiin taitepisteisiin rautalankamalli, josta tehdään kolmioimalla vertailupinta. Tukikerroksen yläpinnasta muodostetun maastomallin ja vertailupinnan erotuksena laskettiin ratasepelin lisäystarve koekohteeksi valitulla ratakilometrillä (kuvat 9 ja 10). Visualisoinnin kohteiden havainnollinen paikantaminen mallissa ratalinjalla edellyttää kilometripaalutuksen esittämistä mallissa. Ratakilometripaalutuksen sisältävää mittalinjaa ei kuitenkaan ollut pilotissa mallinnuksen käytettävissä. Kilometripaalujen sijainti tunnistettiin pistepilvestä tunnistetuista kilometripylväistä (kuva 11) ja ne voitiin visualisoida koordinaattipisteinä malliin.


15 15 Myös radan tasoristeyksen puurakenteisen kansirakenteen mitat voidaan mitata mittausaineistosta jalostetusta ortokuvasta (kuva 12). Kuva 10. Tukikerroksen/ratasepelin vertailupinnan mallinnus ratapölkkyjen yläpinnasta.




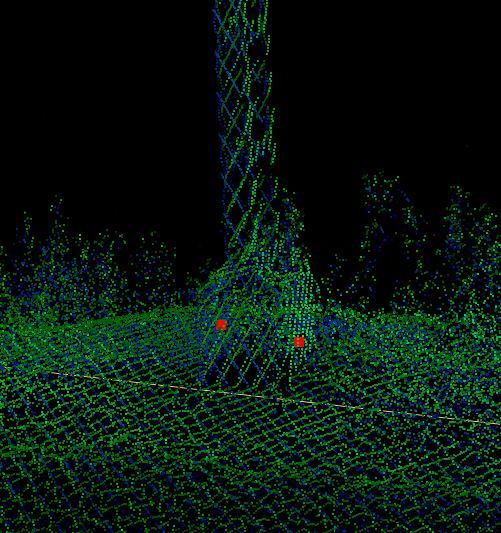
16 16 Kuva 11. Tukikerroksen/ratasepelin kerroksen lisäystarpeen pintakuva. Arvioitu lisäystarve voidaan laskea esimerkiksi kilometrijaolla. Kuva 12. Kilometripylväiden sijainti voidaan määrittää laserdatasta.

17 17 Kuva 13. Tasoristeyksestä tehty yhdistetty malli ja ortokuva, josta voidaan kartoittaa kansirakenteen mittoja. Kuva 14. Kuva pistepilvimallista, jossa on mallinnettu haittapuut, sähköratajohdot, tasoristeysasiat ja tekniikkakappi.

 sekä Tekla Civil -sovellusta (v. 17.3-01 X64). Lisäksi aineiston koodauksessa käytettiin 3D-System Oy:n tuottamaa 3D-Win - sovellusta (v. 6.3.2.1 64-bit).")
18 18 3 LASERDATAN TESTAUS 3.1 Laserdatan testaus väyläsuunnittelujärjestelmässä Destia Oy:n Asiantuntijapalvelu -yksikön kehityspäällikkö Olli Planting testasi keilattua pistepilviaineistoa eri sovelluksilla. Tavoitteena oli saada keilattu aineisto käyttöön ratasuunnitteluun, sekä tarkasteltavaksi visuaaliseen muotoon. Sovelluksina käytettiin Trimblen tuottamia Point Cloud Manager-sovellusta (v / ) sekä Tekla Civil -sovellusta (v X64). Lisäksi aineiston koodauksessa käytettiin 3D-System Oy:n tuottamaa 3D-Win - sovellusta (v bit). Kjell Tuominen Terrasolid Oy:lta toimitti laserkeilatun aineiston.las -tiedostomuodossa, missä oli eroteltuna riskipuusto kolmeen eri tiedostoon ja maanpinta yhteen tiedostoon. Aineiston pistepilven tiheyttä oli rajattu reilusti, jotta tiedostot olivat helposti testattavissa. Aineisto ei ollut koodattua, joten aineisto koodattiin LAS-koodauksella 3D-Win -sovelluksella. 3D-Winissa rajaava tekijä on tiedoston koko, missä noin 70 mt tiedoston koodaus oli jo melko kankeaa. Massiivisten tiedostojen koodaukseen olisi järkevämpää käyttää jotakin toista sovellusta. Koodauksen jälkeen aineisto luettiin Point Cloud Manageriin, missä ohjelma käsitteli luetun datan ja koodauksen avulla osasi erotella riskipuuston sekä maanpinnan omilla väreillään. Väreissä ruskea on maanpinta (ground level), vihreä on ATU-alueelle kaatuva puusto (low vegetation), keltainen on raiteille kaatuva puusto (medium vegetation) ja punainen on johtimiin kaatuva puusto (high vegetation). Kuva 15. Point Cloud Managerissa prosessoitu LAS-aineisto Seuraavaksi Kjell Tuominen toimitti jo valmiiksi koodatun.laz -aineiston testattavaksi, missä tiedostokoko oli suurempi, 11 gt. Aineiston sisäänluku Point Cloud Manageriin kesti n. 2,5 h. Aineisto
 Ruskea: maanpinta")
 Punainen: kasvusto (high vegetation) Tummanharmaa: rakennukset (Buildings)")

19 19 oli erittäin tarkkaa ja näytti 3D-tarkastelussa erittäin hyvältä. Aineistossa värikoodauksena oli seuraava: - Harmaa: ei dataa (Unclassified) Ruskea: maanpinta (ground level) Vihreä: nurmetus (low vegetation) Keltainen: pusikot, heinäkasvusto (medium vegetation) Punainen: kasvusto (high vegetation) Tummanharmaa: rakennukset (Buildings) Tummansininen: Johdinpylväät (water) Vaaleanharmaa: metsä (others) Kuva 16. Point Cloud Managerissa prosessoidun LAZ-aineiston värikoodaus Prosessoitu ja koodattu aineisto näytti hyvältä ja tarkalta myös perusnäkymässä:


20 20 Kuva 17. Point Cloud Managerissa prosessoidun LAZ-aineiston perusnäkymä Point Cloud Manager on hyödyllinen ohjelma koodatun pistepilviaineiston visuaaliseen tarkasteluun, sekä Tekla Civilin referenssikartaksi prosessointiin. Sovelluksella ei kuitenkaan voi muokata tai koodata mitenkään pistepilviaineistoa, joten siihen täytyy olla eri ohjelma. 3D-Win ei ole paras mahdollinen suurien tiedostokokojen koodaamiseen, joten keilattu aineisto tulisi tilata koodattuna ja käsiteltynä, koska raakadatan käsittelyyn soveltuvaa sovellusta ei ole käytössä. Point Cloud Managerissa koodaus on puutteellinen, koska eri luokkia on vain 10 kappaletta. Koodaukseen tulisi saada sama tyyli kuin esim. Liikenneviraston koodilista maastomalleissa. Point Cloud Managerissa tuotettu referenssikartta vastaa suurin piirtein tiedostokooltaan siihen luettua aineistoa. Referenssikartta tulee siirtää Tekla Civilin verkkolevylle, jotta se näkyy Tekla Civilissä. 11 gt kokoisen prosessoidun referenssikartan siirtoon kului aikaa noin 8,5 h. Suuret tiedostokoot ovat ongelma, koska fyysisen levyn ja verkkolevyn tiedostokoot ovat rajallisia. Point Cloud Managerissa ei ole mahdollista tällä hetkellä saada lisäosaa, mikä osaisi automaattisesti määrittää keilatusta puustosta ATU-alueelle, raiteille tai johtimiin kaatuvia puita. Tähän tarkasteluun siis tulisi olla jokin muu ohjelma, tai vaihtoehtoisesti tilata aineisto myös siltä osin jo tarkasteltuna ja käsiteltynä. Tekla Civil Tekla Civiliin on mahdollista viedä Point Cloud Managerissa prosessoitu aineisto.js -tiedostona, jolloin Tekla Civil lukee tiedoston referenssikartaksi ja esittää sen Tekla Civilin 3D-ikkunassa. 3Dikkunassa on Pistepilvi -työkalu, jolla voi säätää kuvan korkeuden visualisointia, jolloin saadaan eroteltua esim. puiden ja maanpinnan värejä tai maanpinnan korkeusvaihtelua.

21 21 Kuva 18. Point Cloud Managerissa prosessoitu LAS-aineisto vietynä.js -tiedostona referenssikartaksi Tekla Civiliin. Värejä eroteltu korkeusarvojen avulla. Sekä ensimmäinen.las -aineisto, että myöhemmin toimitettu.laz- aineisto saatiin vietyä referenssikartaksi Tekla Civiliin: Kuva 19. Point Cloud Managerissa prosessoitu LAZ-aineisto vietynä.js -tiedostona referenssikartaksi Tekla Civiliin. Tekla Civilissä on työkaluna Muodosta pintamalli tiedostoista (Huge Data Processor), jolla kyseinen toiminto tekee suuresta keilausaineistosta pintamallin. Työkalun hyötynä on, että pintamalli ei tallennu sovelluksen tietokantaan, mikä nopeuttaa ja säästää tietokantapalvelimen levytilaa. Pintamalli tallentuu dtm -viivoiksi ja pisteiksi, jota ei voi muokata, mutta pinnan avulla voidaan suunnitella rakenteita ja laskea massoja niin kuin normaalilla maastomallilla.





22 22 Kuva 20. Huge Data Processor -työkalulla prosessoitu.laz- aineiston maanpinta, mikä näkyy pintamallina Tekla Civilissä. Kuva 21. Huge Data Processor -työkalulla prosessoitu.laz- aineiston maanpinta, mikä näkyy pintana poikkileikkausnäkymässä Tekla Civilissä.
23 23 Tekla Civiliä käytetään mm. tie-, katu-, alue-, rata- ja geosuunnitteluun. Tekla Civilissä suunnitellut rakenteita ja linjauksia on mahdollista tarkastella 3D-näkymässä, jolloin ne saadaan samaan ikkunaan auki Point Cloud Managerissa tuotetun.js -referenssikartan kanssa. Tällöin saadaan tuotettua suunnitelluista rakenteista sekä referenssikartasta visuaalinen kokonaisuus, mikä havainnollistaa hyvin suunnitelmaratkaisuja. Tekla Civilin referenssikartan 3D-näyttöikunnassa on vielä kehitettävää, mutta Trimble on ottanut tästä kehitysideoita jo vastaan ja vie ohjelmaa eteenpäin. Huge Data Processorilla saadaan luotua isoista pistepilviaineistoista pintoja, joita voidaan käyttää suunnittelussa, käyttää massojenlaskentaan sekä toteutusmallien suunnitteluun ja tarkasteluun. Tämä antaa uusia mahdollisuuksia suunnittelun eri osa-alueille hyödyntää suuria keilausaineistoja. Huge Data Processor on hyödyllinen lisä suunnittelutyöhön.


24 Laserdatan visualisointi selainpohjaisessa SOVA3D - järjestelmässä S3DMaps on Sova3D Oy:n kehittämä web-selainpohjainen 3D tiedon julkaisualusta. S3D-Maps perustuu avoimeen WebGL-standardiin ja Three.js kirjastojen hyödyntämiseen. S3DMapspalvelimelle on kehitetty omaa optimointiteknologiaa, joka perustuu muun muassa peleihin kehitettyihin teknologioihin sekä yrityksen omaan innovointiin. Perusaineistona käytetään Maanmittauslaitoksen korkeusmallia, sekä muita käytettävissä olevia kartta-aineistoja, sekä esimerkiksi ajantasa-asemakaavoja. Mikäli alueella on käytettävissä uudempaa tai tarkempaa aineistoa ja sitä voi lukea WMS/WFS-rajapintojen kautta ja ne voidaan liittää perusasennuksen yhteydessä järjestelmään. Kuva 22. Kuvassa maanpinnan korkeusmalli ja Tuomioja -Raahe rataosuuden linjaus sekä kilometripaalujen sijainnit. Selaimessa esitettävän datan määrä on tyypillisesti pienempi kuin esim. PC-ympäristössä toimivassa mallien käsittelyohjelmassa. Mallinnettujen aineistojen, kuten pistepilvien, kokoa on visualisoinnin vuoksi pienennetty ja esille tuotavia asioita on vektoroitu. Tämä mahdollistaa helppokäyttöisen käyttöliittymän avulla tarpeellisen datan tehokkaamman hyödyntämisen laajemmalle käyttäjien määrälle.


25 25 Kuva 23. S3D-Maps selainpohjaista julkaisualustaa pilotoitiin mobiilaserkeilausdatasta jalostettujen mallien esittämisessä. Projektikohtainen aineisto S3D-Maps idea on kerätä aineistot Internetistä taustaksi ja julkaista se projektin käytettäväksi. Tarvittaessa aineisto voidaan myös julkistaa vapaasti katseltavaksi. S3D-Mapsin etuna on, että koko Suomen perusaineisto on jo käytössä 3D-muodossa hyödynnettävissä projekteissa. Lähtötietoaineistona voidaan käyttää eri tarkkuustason ja jalostusasteen dataa. MML:n korkeusmalli on perusaineistona koko Suomen alueella. Projektikohtaisesti on usein tarve saada tarkempaa ja monipuolisempaa aineistoa kuten tässä projektissa laserkeilauspistepilvet ja siitä mallinnetut vektoroidut objektit. Käyttöoikeus projektikohtaiseen aineistoon annetaan vain projektin jäsenille. Projektille voidaan kutsua muita osapuolia projektin http-linkin avulla. Linkin kautta projekti avautuu selaimessa. S3D-Maps ohjelmaan on integroitu chat- ja VoiP ominaisuudet. Keskusteluikkunan kautta voidaan keskustelun lisäksi jakaa tarkat näkymät käyttäjien kanssa. Pilotissa laserkeilauksen tuottama pistepilvisaineisto luettiin järjestelmään LAS formaatissa, RGB värjättynä ja luokiteltuna datana.




26 26 Kuva 24. Sova3D:n perusnäkymässä nähdään maanpinta, tiet, sähkölinjat ja rakennukset. Lisäksi mitatusta pistepilvestä on mallinnettu sähköratajohdot, näkemäkaaviot, haittapuurungot ja radan linjaus. Kuva 25. Radan laserkeilauksesta mallinnettuja asioista selainpohjaisessa visualisointiympäristössä.



27 Mallinnuksessa pistepilvestä automaattisesti tunnistetut laitekaapit siirrettiin myös visualisointiympäristöön. Kuva 27. Haittapuiden rungot pistepilvestä mallinnettuna ja värein luokiteltuna. Punainen väri tarkoittaa sähköratajohdoille kaatuessaan ylettyviä puita. Sininen raiteille ja vihreä ATUn alueelle kaatuessaan ylettyviä puita. Pilotoinnin tuloksena ideoitiin mallien hyödyntämiseen perustuvia radan kunnossapitotyön kehitysmahdollisuuksia. Työnjohdon käytössä mallia voitaisiin käyttää haittapuiden poistamisen suunnitteluun toimistolla ja toteutuksen apuna mobiilien tablettien avulla maastossa sekä toteuman seurantaan. Toisaalta tilaaja voi hyödyntää mallia tarjousvaiheen lähtötietona pyytäessään halumaltaan joukolta urakoitsijoita tarjouksen puiden poistosta. Lisäksi urakoitsija voi merkitä mobiililaitteella suorittamansa työosuuden ja vahvistaa tehty työ vaikkapa 360-valokuvalla.
28 28 4 JOHTOPÄÄTÖKSET 4.1 Hyödyntäminen radan kunnossapidossa Pilotissa oli tavoitteena selvittää laserkeilauksesta tuotetun mallin hyödyntämistä radan kunnossapidon tarpeisiin. Ennakolta tavoitteena oli testata haittapuiden, tasoristeysnäkemien ja ratavarusteiden tunnistamista ja mittaamista mitatusta aineistosta. Pilotissa toteutetun mobiililaserkeilauksella tuotetun pistepilvimallin havaittiin sisältävän kattavan mittaustiedon rataympäristön näkyvistä asioista ja pisteaineiston tarkkuuden (arviolta +- 3cm) nähtiin riittävän kunnossapidon tarpeisiin. Rataosuudelle tehtiin ennakolta noin kahden kilometrin välein signaalipisteitä, mutta mallinnusvaiheessa niitä ei tarvinnut käyttää. Radalle kaatuvien haittapuiden kartoitus ja mallinnus laserkeilatusta pistepilvestä Terrasolidin ohjelmilla havaittiin toimivan hyvin. Sähköratajohdot mallinnettiin ensin referenssiaineistoksi haittapuulaskentaan. Puut luokiteltiin etäisyyden ja korkeuden mukaan siten että onko niiden mahdollista kaatua sähköratajohdoille, raiteille tai ATUn alueelle. Mallinnuksessa voitiin erotella myös yksittäisten puiden rungot, mikä antoi vielä lisätietoa ja tarkkuuttaa haittapuiden sijainnista ja määrästä. Haittapuiden mallit siirrettiin selainpohjaiseen sovellukseen, missä puiden sijaintia voitiin havainnollisesti tarkastella ratarakenteiden ja kiinteistörajojen suhteen. Visualisointiympäristössä (Sova3D) oli valmiina maanpinnan korkeusmalli, rakennukset ja tiet, mikä helpotti kokonaisuuden hahmottamista. Yleensäkin haittapuiden kartoitukseen pilotoitu teknologia toimi erittäin hyvin ja sille on käytännön hyödyntämispotentiaalia näköpiirissä. Tähän mennessä rata-alueen tasoristeysten näkemätarkastelut on tehty maastossa paikan päällä tarkastelemalla usean henkilön voimin. Pilotissa tasoristeysnäkemien tarkastelua laserkeilatusta aineistosta tehtiin Terrasolidin mallinnusjärjestelmässä. Näkemäkaaviot sijoitettiin 3D-ympäristöön ja niiden avulla voitiin tarkastella mallipohjaisesti puiden ja pensaiden aiheuttamia näkemäesteitä. Risteävien teiden korkeusmalli mallinnettiin pisteaineiston perusteella ja malleja hyödynnettiin näkemätarkastelussa. Myös näkemäkaaviot siirrettiin selainpohjaiseen visualisointijärjestelmään jossa näkemäesteitä aiheuttavia yksittäisiäkin puita voidaan tarkastella. Havaittiin, että malleja ja visualisointityökaluja on mahdollista käyttää lähtötietomallin tarkasteluun ja myös kunnossapidon työnsuunnittelun lähtötietona. Piloin kokemusten perusteella mallipohjaisella näkemätarkastelulla on mahdollista säästää maastotyökuluissa ja tehdä poistettavien puiden valinta tarkemmin ja luotettavammin. Tekniikkakaapit ja yleensäkin sähköradan näkyvät varusteet voidaan tunnistaa ja mallintaa pistepilviaineistosta. Mallista saadaan kaapin sijaintitiedot ja ulkomitat. Myös kilometritolpat voitiin tunnistaa ja mallintaa pistepilven ja kuva-aineiston perusteella. Kilometritolppatietoa käytettiin visualisoinnissa eri kohteiden paikantamiseen ratalinjalla. Pilotissa testattiin myös ratasepelin vajausten laskemista laserkeilausaineistosta. Ratapölkkyjen yläpinnan mukaan muodostettua vertailupintaa verrattiin maastomalliin ja siitä voitiin laskea ratapölkkyjen välistä puuttuvan ratasepelin tilavuus. Näitä tietoja voidaan hyödyntää kunnossapidossa ja ne tuottavat lisäarvoa kunnossapidon työnsuunnitteluun. Destian kunnossapidon asiantuntijoiden mukaan laserkeilausaineistosta tuotettavaa lähtötietomallia voitaisiin, edellä mainittujen lisäksi, hyödyntää myös kallioleikkausten riskikivien
29 29 havaitsemiseen, ojien ja siltakeilojen kunnon ja kasvillisuuden kartoitukseen sekä liikennemerkkien inventointiin. Tekla Civil rata- ja geosuunnitteluohjelmistoa ja sen lisätoiminnallisuuksia, kuten Point Cloud Manager ja Huge Data processor, testattiin pilotin laserkeilausaineistolla. Tekla Civilissä suunnitellut rakenteet ja Point Cloud managerissa tuotetut kartat on mahdollista tarkastella 3D-näkymässä. Tällöin saadaan tuotettua suunnitelluista rakenteista havainnollistavia kuvia avuksi suunnitteluun. Tekla Civilin referenssikartan 3D-näyttöikunnan kehitysideoista annettiin palaute Trimblelle. Huge Data Processorilla saadaan luotua isoista pistepilviaineistoista pintoja, joita voidaan käyttää suunnittelussa, käyttää massojenlaskentaan sekä toteutusmallien suunnitteluun ja tarkasteluun. Huge Data Processor on hyödyllinen lisä suunnittelutyöhön. 4.2 Ehdotuksia jatkotoimiksi 1) Mobiililaserkeilauksella tuotetun lähtötietomallin hyödyntämisen pilotoinnista radan kunnossapitourakassa: Tehdään valitun rataosuuden mobiililaserkeilaus ennen kunnossapitoalueen tarjouspyyntöä. Valitaan kohde, jossa on tarpeellista ennakolta selvittää haittapuut, tasoristeysnäkemät, ratapenkereen vajaukset, ja radan varusteiden ja laitteiden sijainnit. Mobiililaserkeilatun 3D-lähtötietomallin käyttöönotto osana tarjousaineistoa mahdollistaisi urakan tarjoajille tarkemman työn suunnittelun ja hinnoittelun. Mallien hyödyntäminen huomioitaisiin tarjousvaiheen laatupisteytyksessä ja edistettäisiin mahdollisella kehitysrahoituksella. Kunnossapitoprojektin tuotantovaiheessa mobiililaserkeilaus tehtäisiin uudestaan urakan neljäntenä vuonna. Mallinnusta hyödynnettäisiin toteuman seurannassa ja seuraavan tarjousvaiheen lähtötietodatana. 2) Näkemän mallintaminen virtuaaliympäristössä veturin ylävaloheittimen tunnistamisen avulla. 3) Kunnossapitokohteiden navigointimahdollisuuksien selvittäminen mallinnettua aineistoa hyödyntäen. 4) Tasoristeysten ylitysaikojen simulointi laserkeilatun mallin perusteella 5) Selvitetään mallinnetun aineiston hyödyntämismahdollisuuksia sähköratalaitteiden kunnossapidossa.

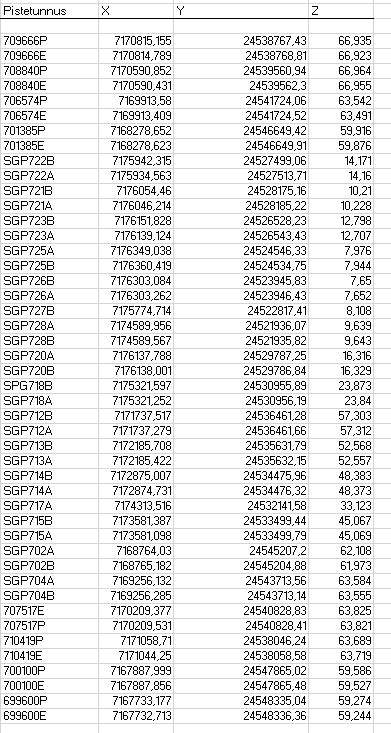
30 30 1 LIITE Rataosuuden Tuomioja-Raahe signalointisuunnitelma: Mitattujen signaalipisteiden koordinaattilistaus:
31 31
 Koordinaatisto: ETRS-GK24 (FIN2005N00) Pistepilvet: LAS 1.2 Kuvat: JPG Paikannus: sbet.")
32 32 LIITE 2 MITTAUKSEN TULOKSENA TOIMITETTU AINEISTO TOIMITETTU AINEISTO Aineiston toimitus: Toimitustapa: Lähetetty matkahuollon kautta ohjeistuksen mukaan Kjell Tuomiselle (ulkoinen kovalevy) Koordinaatisto: ETRS-GK24 (FIN2005N00) Pistepilvet: LAS 1.2 Kuvat: JPG Paikannus: sbet.out & smrmsg.out (WGS84) Lisäksi toimituskovalevyllä on mobiilikartoituksen aikana kerätty raaka-aineisto. Alla olevissa kuvissa punaiset pisteet ovat Destia Oy:n mittaamia referenssipisteitä.
33 33
34 LIITE 3: RATO ohjeen ote 34
35 35
AUTOMAATTISEN TIEDONTUOTANNON KOKEILU: RADAN KUNNOSSAPITOURAKAN LÄHTÖTIEDON TUOTTAMINEN MOBIILILASERKEILAAMALLA
 AUTOMAATTISEN TIEDONTUOTANNON KOKEILU: RADAN KUNNOSSAPITOURAKAN LÄHTÖTIEDON TUOTTAMINEN MOBIILILASERKEILAAMALLA Geotrim päivät, Porvoo 19.9.2018 Taustaa - mitä on mallipohjainen infratuotanto Suunnittelu
AUTOMAATTISEN TIEDONTUOTANNON KOKEILU: RADAN KUNNOSSAPITOURAKAN LÄHTÖTIEDON TUOTTAMINEN MOBIILILASERKEILAAMALLA Geotrim päivät, Porvoo 19.9.2018 Taustaa - mitä on mallipohjainen infratuotanto Suunnittelu
Mobiilikartoitusdatan prosessointi ja hyödyntäminen
 Mobiilikartoitusdatan prosessointi ja hyödyntäminen Alkuprosessointi - Vaiheet 1. Ajoradan jälkilaskenta 2. Havaintodatan korjaus 3. RGB-värjäys 4. Tukipisteiden käyttö Ajoradan jälkilaskenta Korjataan
Mobiilikartoitusdatan prosessointi ja hyödyntäminen Alkuprosessointi - Vaiheet 1. Ajoradan jälkilaskenta 2. Havaintodatan korjaus 3. RGB-värjäys 4. Tukipisteiden käyttö Ajoradan jälkilaskenta Korjataan
Julkinen Mobiililaserkeilaukset rataverkolla
 Julkinen Tero Savolainen & Tommi Turkka 19.9.2018 Julkinen Tero Savolainen 2011 VR Track Oy Ratatekniikka DI, konetekniikka ABB Drive, mekaniikkasuunnittelu Pöyry Civil, teräsrakennesuunnittelu 2009 Infra
Julkinen Tero Savolainen & Tommi Turkka 19.9.2018 Julkinen Tero Savolainen 2011 VR Track Oy Ratatekniikka DI, konetekniikka ABB Drive, mekaniikkasuunnittelu Pöyry Civil, teräsrakennesuunnittelu 2009 Infra
Rautatiekasvillisuudenhallinta laserkeilauksen avulla
 Rautatiekasvillisuudenhallinta laserkeilauksen avulla LIVI/3222/02.01.02/2016 Tuomo Puumalainen Project Manager Oy Arbonaut Ltd. Katja Kapanen Global Virtual Platform GVP Oy 5.9.2018 Tavoitteita Testata
Rautatiekasvillisuudenhallinta laserkeilauksen avulla LIVI/3222/02.01.02/2016 Tuomo Puumalainen Project Manager Oy Arbonaut Ltd. Katja Kapanen Global Virtual Platform GVP Oy 5.9.2018 Tavoitteita Testata
Kansallinen maastotietokanta. KMTK Kuntien tuotantoprosessit: Selvitys mobiilikartoitusmenetelmistä
 Kansallinen maastotietokanta KMTK Kuntien tuotantoprosessit: Selvitys mobiilikartoitusmenetelmistä Projektin selvitys 1 Sisältö 1 YLEISTÄ... 2 1.1 LYHENTEISTÄ JA TERMEISTÄ... 2 2 YLEISTÄ MOBIILIKARTOITUSJÄRJESTELMISTÄ...
Kansallinen maastotietokanta KMTK Kuntien tuotantoprosessit: Selvitys mobiilikartoitusmenetelmistä Projektin selvitys 1 Sisältö 1 YLEISTÄ... 2 1.1 LYHENTEISTÄ JA TERMEISTÄ... 2 2 YLEISTÄ MOBIILIKARTOITUSJÄRJESTELMISTÄ...
LASERKEILAUKSEEN PERUSTUVA 3D-TIEDONKERUU MONIPUOLISIA RATKAISUJA KÄYTÄNNÖN TARPEISIIN
 LASERKEILAUKSEEN PERUSTUVA 3D-TIEDONKERUU MONIPUOLISIA RATKAISUJA KÄYTÄNNÖN TARPEISIIN PSK-BIM seminaari 9.5.2014 Jukka Mäkelä, Oy 1 SMARTGEO OY Palvelujen johtoajatuksena on tarkkojen, kattavien ja luotettavien
LASERKEILAUKSEEN PERUSTUVA 3D-TIEDONKERUU MONIPUOLISIA RATKAISUJA KÄYTÄNNÖN TARPEISIIN PSK-BIM seminaari 9.5.2014 Jukka Mäkelä, Oy 1 SMARTGEO OY Palvelujen johtoajatuksena on tarkkojen, kattavien ja luotettavien
Loppuraportti Blom Kartta Oy - Hulevesien mallintaminen kaupunkiympäristössä / KiraDIGI
 1 YMPÄRISTÖMINISTERIÖ Virve Hokkanen Loppuraportti Blom Kartta Oy - Hulevesien mallintaminen kaupunkiympäristössä / KiraDIGI Kehitystyö Tässä projektissa haluttiin selvittää kaupunkiympäristössä haasteelliseksi
1 YMPÄRISTÖMINISTERIÖ Virve Hokkanen Loppuraportti Blom Kartta Oy - Hulevesien mallintaminen kaupunkiympäristössä / KiraDIGI Kehitystyö Tässä projektissa haluttiin selvittää kaupunkiympäristössä haasteelliseksi
Automaattinen tiedontuotanto on tulevaisuutta. nykyisyyttä
 Automaattinen tiedontuotanto on tulevaisuutta nykyisyyttä Ilmari Halme Rata 2018 24.1.2018 1 Ilmari Halme Vastuualueena teknologia ja innovaatiot Intohimona uudistaminen & digitalisaatio @IlmariHalme linkedin.com/in/ilmarihalme
Automaattinen tiedontuotanto on tulevaisuutta nykyisyyttä Ilmari Halme Rata 2018 24.1.2018 1 Ilmari Halme Vastuualueena teknologia ja innovaatiot Intohimona uudistaminen & digitalisaatio @IlmariHalme linkedin.com/in/ilmarihalme
Pilotti: Mallipohjainen radanrakentamisen automaatio. Pilottisuunnitelma
 LIITE A 1 (9) BUILT ENVIRONMENT PROCESS RE-ENGINEERING (PRE) WP5: InfraFINBIM Pilotti: Mallipohjainen radanrakentamisen automaatio Pilottisuunnitelma Muutoshistoria: Versio Pvm Tila (luonnos / ehdotus
LIITE A 1 (9) BUILT ENVIRONMENT PROCESS RE-ENGINEERING (PRE) WP5: InfraFINBIM Pilotti: Mallipohjainen radanrakentamisen automaatio Pilottisuunnitelma Muutoshistoria: Versio Pvm Tila (luonnos / ehdotus
PRE/InfraFINBIM tietomallivaatimukset ja ohjeet AP3 Suunnittelun ja rakentamisen uudet prosessit
 Built Environment Process Re-engineering PRE PRE/InfraFINBIM tietomallivaatimukset ja ohjeet AP3 Suunnittelun ja rakentamisen uudet prosessit 18.03.2014 Osa 12: Tietomallin hyödyntäminen infran rakentamisessa
Built Environment Process Re-engineering PRE PRE/InfraFINBIM tietomallivaatimukset ja ohjeet AP3 Suunnittelun ja rakentamisen uudet prosessit 18.03.2014 Osa 12: Tietomallin hyödyntäminen infran rakentamisessa
Trimblen mobiilikartoitusportfolio. Trimble MX9 Trimble MX2 Trimble MX7
 Trimblen mobiilikartoitusportfolio Trimble MX9 Trimble MX2 Trimble MX7 Suuret projektit Vaativat kohteet Keskikokoiset projektit Kartoitus ja mallinnus Dokumentointi ja omaisuudenhallinta Panoraamakuva-aineisto
Trimblen mobiilikartoitusportfolio Trimble MX9 Trimble MX2 Trimble MX7 Suuret projektit Vaativat kohteet Keskikokoiset projektit Kartoitus ja mallinnus Dokumentointi ja omaisuudenhallinta Panoraamakuva-aineisto
Mobiilikartoituspäivä Pistepilvien ja kuvien hyödyntäminen Locusympäristössä
 Mobiilikartoituspäivä Pistepilvien ja kuvien hyödyntäminen Locusympäristössä Trimble Locus tuoteperhe Yleisten alueiden luvat Ympäristöluvat Palaute Omaisuuden hallinta - Katu- ja viheralueet - Kunnossapito
Mobiilikartoituspäivä Pistepilvien ja kuvien hyödyntäminen Locusympäristössä Trimble Locus tuoteperhe Yleisten alueiden luvat Ympäristöluvat Palaute Omaisuuden hallinta - Katu- ja viheralueet - Kunnossapito
Maanmittauslaitoksen uusi valtakunnallinen korkeusmalli laserkeilaamalla
 Maanmittauslaitoksen uusi valtakunnallinen korkeusmalli laserkeilaamalla MML:n korkeusmalliprosessin taustalla: Yhteiskunnallinen tarve tarkemmalle korkeustiedolle Tulvadirektiivi, Meludirektiivi Lentokenttäkartat,
Maanmittauslaitoksen uusi valtakunnallinen korkeusmalli laserkeilaamalla MML:n korkeusmalliprosessin taustalla: Yhteiskunnallinen tarve tarkemmalle korkeustiedolle Tulvadirektiivi, Meludirektiivi Lentokenttäkartat,
Pilotti: Lumitöiden estekartoitus. Pilottisuunnitelma
 1 (8) BUILT ENVIRONMENT PROCESS RE-ENGINEERING (PRE) WP5: InfraFINBIM Pilotti: Lumitöiden estekartoitus Pilottisuunnitelma Muutoshistoria: Versio Pvm Tila (luonnos / ehdotus / hyväksytty) Tekijä(t) Huomautukset
1 (8) BUILT ENVIRONMENT PROCESS RE-ENGINEERING (PRE) WP5: InfraFINBIM Pilotti: Lumitöiden estekartoitus Pilottisuunnitelma Muutoshistoria: Versio Pvm Tila (luonnos / ehdotus / hyväksytty) Tekijä(t) Huomautukset
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää
 Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
www.terrasolid.com Kaupunkimallit
 www.terrasolid.com Kaupunkimallit Arttu Soininen 03.12.2015 Vuonna 1993 Isoja askeleita 1993-2015 Laserkeilaus helikopterilla/lentokoneella Laserkeilaus paikaltaan GPS+IMU yleistynyt kaikkeen ilmasta mittaukseen
www.terrasolid.com Kaupunkimallit Arttu Soininen 03.12.2015 Vuonna 1993 Isoja askeleita 1993-2015 Laserkeilaus helikopterilla/lentokoneella Laserkeilaus paikaltaan GPS+IMU yleistynyt kaikkeen ilmasta mittaukseen
Ilmaisia ohjelmia laserkeilausaineistojen käsittelyyn. Laserkeilaus- ja korkeusmalliseminaari 8.10.2010 Jakob Ventin, Aalto-yliopisto
 Ilmaisia ohjelmia laserkeilausaineistojen käsittelyyn Laserkeilaus- ja korkeusmalliseminaari 8.10.2010, Aalto-yliopisto Johdanto Aalto-yliopiston maanmittausosastolla tehdyn kesätyön tuloksia Tehtävä oli
Ilmaisia ohjelmia laserkeilausaineistojen käsittelyyn Laserkeilaus- ja korkeusmalliseminaari 8.10.2010, Aalto-yliopisto Johdanto Aalto-yliopiston maanmittausosastolla tehdyn kesätyön tuloksia Tehtävä oli
Johdatus mobiilikartoituksen maailmaan. Joni Salo, Geotrim Oy
 Johdatus mobiilikartoituksen maailmaan Joni Salo, Geotrim Oy 19.9.2018 Luennot tänään 9.30-10.00 Johdatus mobiilikartoitukseen 10.00 10.30 Trimblen mobiilikartoitusratkaisut ja uusi MX9 10.30 13.00 Laitteistodemot
Johdatus mobiilikartoituksen maailmaan Joni Salo, Geotrim Oy 19.9.2018 Luennot tänään 9.30-10.00 Johdatus mobiilikartoitukseen 10.00 10.30 Trimblen mobiilikartoitusratkaisut ja uusi MX9 10.30 13.00 Laitteistodemot
Visualisoinnin ja vuorovaikutuksen voimavarat
 Visualisoinnin ja vuorovaikutuksen voimavarat Päivi Tiihonen HYVINKÄÄN KAUPUNKI Täältä löytyy vaikka mitä, tänne kannattaa tulla! Hyvinkään kaupungin 3D-kehitys Kokeilevaa -> uudet teknologiat! Selainpohjaista
Visualisoinnin ja vuorovaikutuksen voimavarat Päivi Tiihonen HYVINKÄÄN KAUPUNKI Täältä löytyy vaikka mitä, tänne kannattaa tulla! Hyvinkään kaupungin 3D-kehitys Kokeilevaa -> uudet teknologiat! Selainpohjaista
ja ilmakuvauksen hankinta
 HANKEKUVAUS, liite 6 1 /6 Imatran kaupungin 3Dkaupunkimalli: Laserkeilausdatan ja ilmakuvauksen hankinta HANKEKUVAUS ja KILPAILUTUSMENETTELY Vasemmalla rakennuskaavan pohjakarttaa Vuoksenniskalta1930 luvulta,
HANKEKUVAUS, liite 6 1 /6 Imatran kaupungin 3Dkaupunkimalli: Laserkeilausdatan ja ilmakuvauksen hankinta HANKEKUVAUS ja KILPAILUTUSMENETTELY Vasemmalla rakennuskaavan pohjakarttaa Vuoksenniskalta1930 luvulta,
Built Environment Process Reengineering (PRE)
") RAKENNETTU YMPÄRISTÖ Tarvitaanko tätä palkkia? Built Environment Process Reengineering (PRE) InfraFINBIM PILOTTIPÄIVÄ nro 5, 3.10.2012 Nissolan ratasuunnitelma SITO / Juha Liukas Built Environment Process
RAKENNETTU YMPÄRISTÖ Tarvitaanko tätä palkkia? Built Environment Process Reengineering (PRE) InfraFINBIM PILOTTIPÄIVÄ nro 5, 3.10.2012 Nissolan ratasuunnitelma SITO / Juha Liukas Built Environment Process
Lumitöiden estekartoitus
 Lumitöiden estekartoitus Infra FINBIM Pilottipäivä nro 8 Eija Heikkilä 24.10.2013 Sisällysluettelo Tausta ja tavoite Toteutus Tulokset ja havaitut ongelmat Tausta ja tavoite Lumitöissä rikottujen laitteiden
Lumitöiden estekartoitus Infra FINBIM Pilottipäivä nro 8 Eija Heikkilä 24.10.2013 Sisällysluettelo Tausta ja tavoite Toteutus Tulokset ja havaitut ongelmat Tausta ja tavoite Lumitöissä rikottujen laitteiden
Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta
 Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta Sanna Kaasalainen Kaukokartoituksen ja Fotogrammetrian Osasto Ilmastonmuutos ja ääriarvot 13.9.2012 Ympäristön Aktiivinen
Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta Sanna Kaasalainen Kaukokartoituksen ja Fotogrammetrian Osasto Ilmastonmuutos ja ääriarvot 13.9.2012 Ympäristön Aktiivinen
Maastokartta pistepilvenä Harri Kaartinen, Maanmittauspäivät
 Maastokartta pistepilvenä 22.3.2018 Harri Kaartinen, Maanmittauspäivät 2018 1 Sisältö Pistepilvi aineistolähteenä Aineiston keruu Aineistojen yhdistäminen ja käsittely Sovellukset 22.3.2018 Harri Kaartinen,
Maastokartta pistepilvenä 22.3.2018 Harri Kaartinen, Maanmittauspäivät 2018 1 Sisältö Pistepilvi aineistolähteenä Aineiston keruu Aineistojen yhdistäminen ja käsittely Sovellukset 22.3.2018 Harri Kaartinen,
Maanmittauspäivät 2014 Seinäjoki
 Maanmittauspäivät 2014 Seinäjoki Parempaa tarkkuutta satelliittimittauksille EUREF/N2000 - järjestelmissä Ympäristösi parhaat tekijät 2 EUREF koordinaattijärjestelmän käyttöön otto on Suomessa sujunut
Maanmittauspäivät 2014 Seinäjoki Parempaa tarkkuutta satelliittimittauksille EUREF/N2000 - järjestelmissä Ympäristösi parhaat tekijät 2 EUREF koordinaattijärjestelmän käyttöön otto on Suomessa sujunut
Access. Käyttöturva. Rahoitus. Assistant. Paikkatieto. VRSnet. GIS-mobiilipalvelut
 Access Käyttöturva Rahoitus Assistant VRSnet Paikkatieto GIS-mobiilipalvelut Mittaustiedon hallinta Trimble Access Tuo maasto ja toimisto lähemmäksi toisiaan Trimble Access Joustava tiedon jakaminen Toimistosta
Access Käyttöturva Rahoitus Assistant VRSnet Paikkatieto GIS-mobiilipalvelut Mittaustiedon hallinta Trimble Access Tuo maasto ja toimisto lähemmäksi toisiaan Trimble Access Joustava tiedon jakaminen Toimistosta
Tietomallien hyödyntämismahdollisuudet tieverkon ylläpidossa
 Novapoint käyttäjäpäivät 9.4.2014 Tietomallien hyödyntämismahdollisuudet tieverkon ylläpidossa Manu Marttinen Aluepäällikkö NCC Roads Oy Jyrsinnät ja kerrosstabiloinnit 1 Sisältö 1. Tieverkon ylläpito
Novapoint käyttäjäpäivät 9.4.2014 Tietomallien hyödyntämismahdollisuudet tieverkon ylläpidossa Manu Marttinen Aluepäällikkö NCC Roads Oy Jyrsinnät ja kerrosstabiloinnit 1 Sisältö 1. Tieverkon ylläpito
Toteutusmalleihin liittyvät haasteet Äänekosken ratahankkeella Pauli Ruokanen VR Track Oy, Suunnittelu
 Toteutusmalleihin liittyvät haasteet Äänekosken ratahankkeella 1.2.2017 Pauli Ruokanen VR Track Oy, Suunnittelu Yleistä hankkeesta Äänekosken biotuotetehtaan liikenneyhteydet, ratahanke Tampere-Jyväskylä,
Toteutusmalleihin liittyvät haasteet Äänekosken ratahankkeella 1.2.2017 Pauli Ruokanen VR Track Oy, Suunnittelu Yleistä hankkeesta Äänekosken biotuotetehtaan liikenneyhteydet, ratahanke Tampere-Jyväskylä,
Laserkeilauksen ja kuvauksen tilaaminen
 www.terrasolid.com Laserkeilauksen ja kuvauksen tilaaminen Arttu Soininen 22.08.2017 Käsiteltävät aiheet Tarjouspyynnössä määrättävät asiat Laserkeilaustyön jakaminen osiin Ajankohdan vaikutus laserkeilaukseen
www.terrasolid.com Laserkeilauksen ja kuvauksen tilaaminen Arttu Soininen 22.08.2017 Käsiteltävät aiheet Tarjouspyynnössä määrättävät asiat Laserkeilaustyön jakaminen osiin Ajankohdan vaikutus laserkeilaukseen
Uutta Terra-ohjelmissa
 www.terrasolid.com Uutta Terra-ohjelmissa Arttu Soininen 03.12.2015 Uutta tiekohteisiin viimeisinä vuosina Parannuksia mobiilidatan sijainnin parantamiseen Uusia työkaluja lopputuotteiden tekemiseen, esim.
www.terrasolid.com Uutta Terra-ohjelmissa Arttu Soininen 03.12.2015 Uutta tiekohteisiin viimeisinä vuosina Parannuksia mobiilidatan sijainnin parantamiseen Uusia työkaluja lopputuotteiden tekemiseen, esim.
BIM Suunnittelun ja rakentamisen uusiutuvat toimintatavat Teppo Rauhala
 BIM Suunnittelun ja rakentamisen uusiutuvat toimintatavat Teppo Rauhala Proxion 19.10.2015 Proxion BIM historiikkia Kehitystyö lähtenyt rakentamisen tarpeista Työkoneautomaatio alkoi yleistymään 2000 luvulla
BIM Suunnittelun ja rakentamisen uusiutuvat toimintatavat Teppo Rauhala Proxion 19.10.2015 Proxion BIM historiikkia Kehitystyö lähtenyt rakentamisen tarpeista Työkoneautomaatio alkoi yleistymään 2000 luvulla
Koulutus 2: Pistepilviohjelmistot
 ProDigiOUs -hanke Koulutus 2: Pistepilviohjelmistot Kalle Tammi Kevät 2018 Koulutuksen sisältö 1. Aloitus 2. Yleistä ohjelmistoista 3. Scene-ohjelma, käyttöliittymä ja toiminnot 4. Pistepilvien käsittely
ProDigiOUs -hanke Koulutus 2: Pistepilviohjelmistot Kalle Tammi Kevät 2018 Koulutuksen sisältö 1. Aloitus 2. Yleistä ohjelmistoista 3. Scene-ohjelma, käyttöliittymä ja toiminnot 4. Pistepilvien käsittely
Digitaalinen luovutusaineisto
 Digitaalinen luovutusaineisto BuildingSMART Finland Inframallintamisen päivä 2017 Kari Partiainen Projektipäällikkö Liikennevirasto 6.2.2017 Ville Suntio Projekti- ja kehityspäällikkö Destia Oy Pilottihanke
Digitaalinen luovutusaineisto BuildingSMART Finland Inframallintamisen päivä 2017 Kari Partiainen Projektipäällikkö Liikennevirasto 6.2.2017 Ville Suntio Projekti- ja kehityspäällikkö Destia Oy Pilottihanke
Kaupunkimalli Heinolassa
 Kaupunkimalli Heinolassa Hankittu EAKR-hankerahoituksella, 2012 (ensimmäinen versio 2011) Alusta: Vianova Oy:n Novapoint Virtual Map (Autodesk IDSP) Tuotettu kaupungin kantakartasta, MML:n maastotietokannasta,
Kaupunkimalli Heinolassa Hankittu EAKR-hankerahoituksella, 2012 (ensimmäinen versio 2011) Alusta: Vianova Oy:n Novapoint Virtual Map (Autodesk IDSP) Tuotettu kaupungin kantakartasta, MML:n maastotietokannasta,
Geotrim TAMPEREEN SEUTUKUNNAN MITTAUSPÄIVÄT 29.3.2006
 Geotrim TAMPEREEN SEUTUKUNNAN MITTAUSPÄIVÄT 29.3.2006 Satelliittimittauksen tulevaisuus GPS:n modernisointi, L2C, L5 GALILEO GLONASS GNSS GPS:n modernisointi L2C uusi siviilikoodi L5 uusi taajuus Block
Geotrim TAMPEREEN SEUTUKUNNAN MITTAUSPÄIVÄT 29.3.2006 Satelliittimittauksen tulevaisuus GPS:n modernisointi, L2C, L5 GALILEO GLONASS GNSS GPS:n modernisointi L2C uusi siviilikoodi L5 uusi taajuus Block
TERRASOLID Point Cloud Intelligence
 www.terrasolid.com TERRASOLID Point Cloud Intelligence Keilaus- ja kuva-aineiston jalostaminen kaupunkimalliksi Kimmo Soukki 1.9.2016 Sisältö LOD ajattelu Lähtökohdat vektoroinnille Vektorointi Vektorointitavoista
www.terrasolid.com TERRASOLID Point Cloud Intelligence Keilaus- ja kuva-aineiston jalostaminen kaupunkimalliksi Kimmo Soukki 1.9.2016 Sisältö LOD ajattelu Lähtökohdat vektoroinnille Vektorointi Vektorointitavoista
UAV:n avulla tuotetun fotogrametrsine pistepilven hyödyntäminen infrahankkeen suunnittelussa ja rakentamisessa Olli Sihvola, työpäällikkö, SRV
 UAV:n avulla tuotetun fotogrametrsine pistepilven hyödyntäminen infrahankkeen suunnittelussa ja rakentamisessa Olli Sihvola, työpäällikkö, SRV 1 2018-11-09 Gendiatur, que reiunt explabo. Ut asinctiis de
UAV:n avulla tuotetun fotogrametrsine pistepilven hyödyntäminen infrahankkeen suunnittelussa ja rakentamisessa Olli Sihvola, työpäällikkö, SRV 1 2018-11-09 Gendiatur, que reiunt explabo. Ut asinctiis de
Metsäkoneiden sensoritekniikka kehittyy. Heikki Hyyti, Aalto-yliopisto
 Metsäkoneiden sensoritekniikka kehittyy, Metsäkoneiden sensoritekniikka kehittyy Miksi uutta sensoritekniikkaa? Tarkka paikkatieto metsässä Metsäkoneen ja puomin asennon mittaus Konenäkö Laserkeilaus Tietolähteiden
Metsäkoneiden sensoritekniikka kehittyy, Metsäkoneiden sensoritekniikka kehittyy Miksi uutta sensoritekniikkaa? Tarkka paikkatieto metsässä Metsäkoneen ja puomin asennon mittaus Konenäkö Laserkeilaus Tietolähteiden
Mobiilikartoituksen sovellukset
 Mobiilikartoituksen sovellukset MX7 käyttökohteita maailmalta Karttojen laadunhallinta MAPA, Slovakia Kasvillisuuden seuranta AÄPA, Ranska Verkostojen suunnittelu - Wasser-und Verkehrs-Kontor GmbH, Saksa
Mobiilikartoituksen sovellukset MX7 käyttökohteita maailmalta Karttojen laadunhallinta MAPA, Slovakia Kasvillisuuden seuranta AÄPA, Ranska Verkostojen suunnittelu - Wasser-und Verkehrs-Kontor GmbH, Saksa
MAASTOKARTOITUSAINEISTON VISUALISOINTI. Kai Lappalainen, Ramboll Finland Tampere
 MAASTOKARTOITUSAINEISTON VISUALISOINTI Kai Lappalainen, Ramboll Finland Tampere RAMBOLL FINLAND OY Perustettu vuonna 1962 Vuonna 2009 lähes 1200 työntekijää 23 paikkakunnalla Liikevaihto 89,9 M (2009)
MAASTOKARTOITUSAINEISTON VISUALISOINTI Kai Lappalainen, Ramboll Finland Tampere RAMBOLL FINLAND OY Perustettu vuonna 1962 Vuonna 2009 lähes 1200 työntekijää 23 paikkakunnalla Liikevaihto 89,9 M (2009)
Paikkatiedon tulevaisuus
 Paikkatiedon tulevaisuus Yksityismetsätalouden metsänhoitajien vierailu TE:llä 11.10.2007 Juhani Tervo Pääarkkitehti, GIS Iso skaala erilaisia paikkatietojärjestelmiä Paikkatieto tietojärjestelmissä Paikkatietojärjestelmä
Paikkatiedon tulevaisuus Yksityismetsätalouden metsänhoitajien vierailu TE:llä 11.10.2007 Juhani Tervo Pääarkkitehti, GIS Iso skaala erilaisia paikkatietojärjestelmiä Paikkatieto tietojärjestelmissä Paikkatietojärjestelmä
Mallipohjainen radanrakentamisen automaatio
 Mallipohjainen radanrakentamisen automaatio Infra FINBIM Pilottipäivät 24.10.2013 Jussi Heikkilä Mallipohjainen radanrakentamisen automaatio Pilotin kesto: huhtikuu/2012 lokakuu/2012 Diplomityö Tietomallipohjaisen
Mallipohjainen radanrakentamisen automaatio Infra FINBIM Pilottipäivät 24.10.2013 Jussi Heikkilä Mallipohjainen radanrakentamisen automaatio Pilotin kesto: huhtikuu/2012 lokakuu/2012 Diplomityö Tietomallipohjaisen
Riistapäivät 2015 Markus Melin Itä Suomen Yliopisto Metsätieteiden osasto markus.melin@uef.fi
 Riistapäivät 2015 Markus Melin Itä Suomen Yliopisto Metsätieteiden osasto markus.melin@uef.fi Laserkeilaus pähkinänkuoressa Aktiivista kaukokartoitusta, joka tuottaa 3D aineistoa (vrt. satelliitti- ja
Riistapäivät 2015 Markus Melin Itä Suomen Yliopisto Metsätieteiden osasto markus.melin@uef.fi Laserkeilaus pähkinänkuoressa Aktiivista kaukokartoitusta, joka tuottaa 3D aineistoa (vrt. satelliitti- ja
Puukarttajärjestelmä hakkuun tehostamisessa. Timo Melkas Mikko Miettinen Jarmo Hämäläinen Kalle Einola
 Puukarttajärjestelmä hakkuun tehostamisessa Timo Melkas Mikko Miettinen Jarmo Hämäläinen Kalle Einola Tavoite Tutkimuksessa selvitettiin hakkuukoneeseen kehitetyn puukarttajärjestelmän (Optical Tree Measurement
Puukarttajärjestelmä hakkuun tehostamisessa Timo Melkas Mikko Miettinen Jarmo Hämäläinen Kalle Einola Tavoite Tutkimuksessa selvitettiin hakkuukoneeseen kehitetyn puukarttajärjestelmän (Optical Tree Measurement
GEOENERGIAKARTTA (6) GEOENERGIAKARTTA. Prosessikuvaus. Jussi Lehtinen 1.0
 GEOENERGIAKARTTA. Prosessikuvaus. Jussi Lehtinen 1.0") 5.7.2012 1 (6) GEOENERGIAKARTTA Prosessikuvaus Jussi Lehtinen 1.0 5.7.2012 5.7.2012 2 (6) 1 Lähtökohdat 1.1 Kartan sisällön määrittely 1.2 Lähtötiedot Projektin aloituskokouksessa 16.4.2012 sovittiin kartan
5.7.2012 1 (6) GEOENERGIAKARTTA Prosessikuvaus Jussi Lehtinen 1.0 5.7.2012 5.7.2012 2 (6) 1 Lähtökohdat 1.1 Kartan sisällön määrittely 1.2 Lähtötiedot Projektin aloituskokouksessa 16.4.2012 sovittiin kartan
Infra 2010 loppuseminaari, Helsinki 5.11.2008 Siltojen tuotemallintamisen ja rakentamisautomaation
 Infra 2010 loppuseminaari, Helsinki 5.11.2008 Siltojen tuotemallintamisen ja rakentamisautomaation kehittäminen (5D-SILTA) Rauno Heikkilä Oulun yliopisto, Rakentamisteknologian tutkimusryhmä Sisältö 1)
Infra 2010 loppuseminaari, Helsinki 5.11.2008 Siltojen tuotemallintamisen ja rakentamisautomaation kehittäminen (5D-SILTA) Rauno Heikkilä Oulun yliopisto, Rakentamisteknologian tutkimusryhmä Sisältö 1)
Algoritmi I kuvioiden ja niille johtavien ajourien erottelu. Metsätehon tuloskalvosarja 7a/2018 LIITE 1 Timo Melkas Kirsi Riekki Metsäteho Oy
 Algoritmi I kuvioiden ja niille johtavien ajourien erottelu Metsätehon tuloskalvosarja 7a/2018 LIITE 1 Timo Melkas Kirsi Riekki Metsäteho Oy Algoritmi I kuvioiden ja niille johtavien ajourien erottelu
Algoritmi I kuvioiden ja niille johtavien ajourien erottelu Metsätehon tuloskalvosarja 7a/2018 LIITE 1 Timo Melkas Kirsi Riekki Metsäteho Oy Algoritmi I kuvioiden ja niille johtavien ajourien erottelu
Mobiilikartoitus päällystyskohteissa Geotrim mobiilikartoituspäivä Lauri Hartikainen, toimitusjohtaja 3point Oy / Pointscene.
 Mobiilikartoitus päällystyskohteissa Geotrim mobiilikartoituspäivä 19.9.2018 Lauri Hartikainen, toimitusjohtaja 3point Oy / Pointscene.com TAUSTAA MALLIPOHJAISEN PÄÄLLYSTYSHANKKEEN KULKU MOBIILIKARTOITUS
Mobiilikartoitus päällystyskohteissa Geotrim mobiilikartoituspäivä 19.9.2018 Lauri Hartikainen, toimitusjohtaja 3point Oy / Pointscene.com TAUSTAA MALLIPOHJAISEN PÄÄLLYSTYSHANKKEEN KULKU MOBIILIKARTOITUS
Käyttöohje HERE Maps. 1.0. painos FI
 Käyttöohje HERE Maps 1.0. painos FI HERE Maps HERE Maps näyttää lähellä olevat kohteet ja opastaa sinut perille. Voit etsiä kaupunkeja, katuja ja palveluja löytää perille tarkkojen reittiohjeiden avulla
Käyttöohje HERE Maps 1.0. painos FI HERE Maps HERE Maps näyttää lähellä olevat kohteet ja opastaa sinut perille. Voit etsiä kaupunkeja, katuja ja palveluja löytää perille tarkkojen reittiohjeiden avulla
Teledyne Optech Titan -monikanavalaser ja sen sovellusmahdollisuudet
 Teledyne Optech Titan -monikanavalaser ja sen sovellusmahdollisuudet Jan Biström TerraTec Oy TerraTec-ryhmä Emoyhtiö norjalainen TerraTec AS Liikevaihto 2015 noin 13 miljoonaa euroa ja noin 90 työntekijää
Teledyne Optech Titan -monikanavalaser ja sen sovellusmahdollisuudet Jan Biström TerraTec Oy TerraTec-ryhmä Emoyhtiö norjalainen TerraTec AS Liikevaihto 2015 noin 13 miljoonaa euroa ja noin 90 työntekijää
Kaupunkimallintaminen Espoossa 2016 Tapani Honkanen
 Kaupunkimallintaminen Espoossa 2016 Tapani Honkanen 4.2.2016 Viimeaikaisia mallinnuksia CityPlanner Online on selaimella (WebGL)käytettävä 3D-visualisointipalvelu ja vuorovaikutustyökalu. Leppävaarasta
Kaupunkimallintaminen Espoossa 2016 Tapani Honkanen 4.2.2016 Viimeaikaisia mallinnuksia CityPlanner Online on selaimella (WebGL)käytettävä 3D-visualisointipalvelu ja vuorovaikutustyökalu. Leppävaarasta
5 syytä hyödyntää ensiluokkaista paikannustarkkuutta maastotyöskentelyssä
 5 syytä hyödyntää ensiluokkaista paikannustarkkuutta maastotyöskentelyssä Taskukokoinen, maastokelpoinen Trimble R1 GNSS -vastaanotin mahdollistaa ammattitasoisen paikkatiedonkeruun. Kun R1 yhdistetään
5 syytä hyödyntää ensiluokkaista paikannustarkkuutta maastotyöskentelyssä Taskukokoinen, maastokelpoinen Trimble R1 GNSS -vastaanotin mahdollistaa ammattitasoisen paikkatiedonkeruun. Kun R1 yhdistetään
LOCATION BUSINESS FORUM 2018
 LOCATION BUSINESS FORUM 2018 KAMERA VAI LASERKEILAIN; RPAS TIEDONKERUU MAASTOMALLIHANKKEESSA Tripodi Finland Oy Juha Liimatainen Founder & COO Kamera vai laserkeilain? Tuttu dilemma 15 vuoden takaa. Vai
LOCATION BUSINESS FORUM 2018 KAMERA VAI LASERKEILAIN; RPAS TIEDONKERUU MAASTOMALLIHANKKEESSA Tripodi Finland Oy Juha Liimatainen Founder & COO Kamera vai laserkeilain? Tuttu dilemma 15 vuoden takaa. Vai
Nykyaikaiset paikkatietoratkaisut. Autodesk AutoCAD Civil 3D 2015 A BIM for infrastructure software solution. Olli Ojala Future Group Oy
 Autodesk AutoCAD Civil 3D 2015 A BIM for infrastructure software solution Olli Ojala Future Group Oy Autodesk AutoCAD Civil 3D 2015 PAIKKATIEDOT PIIRUSTUKSET MITTAUKSET MASSAT MAASTOMALLI MAASTOONMERKINTÄ
Autodesk AutoCAD Civil 3D 2015 A BIM for infrastructure software solution Olli Ojala Future Group Oy Autodesk AutoCAD Civil 3D 2015 PAIKKATIEDOT PIIRUSTUKSET MITTAUKSET MASSAT MAASTOMALLI MAASTOONMERKINTÄ
Maailma visuaalivalmistajan näkökulmasta
 Maailma visuaalivalmistajan näkökulmasta Haasteita ja motivointia projektille Esityksen sisältö Laaja-alaiset tietokannat ja niiden rakentaminen Geospesifinen ja geotyyppinen tietokanta Lähtömateriaaliongelmia
Maailma visuaalivalmistajan näkökulmasta Haasteita ja motivointia projektille Esityksen sisältö Laaja-alaiset tietokannat ja niiden rakentaminen Geospesifinen ja geotyyppinen tietokanta Lähtömateriaaliongelmia
Tarkkuuden hallinta mittausprosessissa
 - Tarkkuuden hallinta mittausprosessissa Tauno Suominen/ Nordic GeoCenter Oy 21.03.2018 kuva: Tampereen kaupunki/idis Design Oy Nordic GeoCenter Oy Suomen vanhin geodeettisten 3D-laserskannereiden maahantuontiin,
- Tarkkuuden hallinta mittausprosessissa Tauno Suominen/ Nordic GeoCenter Oy 21.03.2018 kuva: Tampereen kaupunki/idis Design Oy Nordic GeoCenter Oy Suomen vanhin geodeettisten 3D-laserskannereiden maahantuontiin,
Yleiset inframallivaatimukset YIV 2015
 Yleiset inframallivaatimukset YIV 2015 Osa 12: Inframallin hyödyntäminen suunnittelun eri vaiheissa ja rakentamisessa MAANRAKENTAMISEN MALLIPOHJAINEN LAADUNVARMISTUSMENETELMÄ GEOMETRISTEN MITTOJEN LAADUNVALVONTA
Yleiset inframallivaatimukset YIV 2015 Osa 12: Inframallin hyödyntäminen suunnittelun eri vaiheissa ja rakentamisessa MAANRAKENTAMISEN MALLIPOHJAINEN LAADUNVARMISTUSMENETELMÄ GEOMETRISTEN MITTOJEN LAADUNVALVONTA
Muita kuvankäsittelyohjelmia on mm. Paint Shop Pro, Photoshop Elements, Microsoft Office Picture Manager
 Missio: 1. Asentaminen 2. Valokuvien tarkastelu, tallennus/formaatit, koko, tarkkuus, korjaukset/suotimet, rajaus 3. Kuvan luonti/työkalut (grafiikka kuvat) 4. Tekstin/grafiikan lisääminen kuviin, kuvien/grafiikan
Missio: 1. Asentaminen 2. Valokuvien tarkastelu, tallennus/formaatit, koko, tarkkuus, korjaukset/suotimet, rajaus 3. Kuvan luonti/työkalut (grafiikka kuvat) 4. Tekstin/grafiikan lisääminen kuviin, kuvien/grafiikan
VIRTUAALI - SEINÄJOKI 11.2.2014
 VIRTUAALI - SEINÄJOKI 11.2.2014 SEINÄJOKI SEINÄJOESTA TIETOA Seinäjoki sijaitsee Etelä-Pohjanmaalla. Tampereelle matkaa n.175 km, Vaasaan n. 80km, Jyväskylään n. 200km. V.2013 ylittyi 60 000 asukkaan
VIRTUAALI - SEINÄJOKI 11.2.2014 SEINÄJOKI SEINÄJOESTA TIETOA Seinäjoki sijaitsee Etelä-Pohjanmaalla. Tampereelle matkaa n.175 km, Vaasaan n. 80km, Jyväskylään n. 200km. V.2013 ylittyi 60 000 asukkaan
Laadunhallinta Infratyömaalla
 Laadunhallinta Infratyömaalla Mittaamaalla, mallintamalla, yhteensovittamalla 6.11.2018 BIM KEHITYS 2 TERMIT JA FORMAATIT Mallipohjaiset formaatit tukevat geometrian lisäksi laajan ominaisuustiedon välitystä.
Laadunhallinta Infratyömaalla Mittaamaalla, mallintamalla, yhteensovittamalla 6.11.2018 BIM KEHITYS 2 TERMIT JA FORMAATIT Mallipohjaiset formaatit tukevat geometrian lisäksi laajan ominaisuustiedon välitystä.
Sähköiset työkalut paikkasidonnaiseen tiedonkeruuseen ja -hallintaan ympäristösektorille ja teollisuudelle
 Sähköiset työkalut paikkasidonnaiseen tiedonkeruuseen ja -hallintaan ympäristösektorille ja teollisuudelle Tausta SCATMAN Oy - Yritysesittely SCATMAN Oy on oululainen vuonna 2013 perustettu ohjelmistoyritys,
Sähköiset työkalut paikkasidonnaiseen tiedonkeruuseen ja -hallintaan ympäristösektorille ja teollisuudelle Tausta SCATMAN Oy - Yritysesittely SCATMAN Oy on oululainen vuonna 2013 perustettu ohjelmistoyritys,
LAS- ja ilmakuva-aineistojen käsittely ArcGIS:ssä
 Esri Finland LAS- ja ilmakuva-aineistojen käsittely ArcGIS:ssä November 2012 Janne Saarikko Agenda Lidar-aineistot ja ArcGIS 10.1 - Miten LAS-aineistoa voidaan hyödyntää? - Aineistojen hallinta LAS Dataset
Esri Finland LAS- ja ilmakuva-aineistojen käsittely ArcGIS:ssä November 2012 Janne Saarikko Agenda Lidar-aineistot ja ArcGIS 10.1 - Miten LAS-aineistoa voidaan hyödyntää? - Aineistojen hallinta LAS Dataset
Built Environment Process Reengineering (PRE)
") RAKENNETTU YMPÄRISTÖ Tarvitaanko tätä palkkia? Built Environment Process Reengineering (PRE) InfraFINBIM PILOTTIPÄIVÄ nro 4, 9.5.2012 Tuotemallinnuksen käyttöönotto Built Environment Process Innovations
RAKENNETTU YMPÄRISTÖ Tarvitaanko tätä palkkia? Built Environment Process Reengineering (PRE) InfraFINBIM PILOTTIPÄIVÄ nro 4, 9.5.2012 Tuotemallinnuksen käyttöönotto Built Environment Process Innovations
KANTAKARTASTA 3D-KAUPUNKITIETOMALLI
 KANTAKARTASTA 3D-KAUPUNKITIETOMALLI #kantakartastakaupunkimalli @tanelihil 3D:n ajankohtaiset 5/2017 Kaupunkitietomalli vs. Meshmalli Kaupunkimallin perustukset Kaupunkimallin rakenne Level of Detail (LOD)
KANTAKARTASTA 3D-KAUPUNKITIETOMALLI #kantakartastakaupunkimalli @tanelihil 3D:n ajankohtaiset 5/2017 Kaupunkitietomalli vs. Meshmalli Kaupunkimallin perustukset Kaupunkimallin rakenne Level of Detail (LOD)
Trimnet Plus -palvelut
 Trimnet Plus -palvelut TRIMNET PERUSPALVELUT GPS/GLONASST TRIMNET PLUS PALVELUT GPS/GLONASS/GALILEO/BEIDOU/ QZSS VRS Pro VRS Pro + cm VRS RTK VRS RTK + cm TARKKUUS VRS H-Star VRS H-Star + 10 cm VRS DGPS/DGNSS
Trimnet Plus -palvelut TRIMNET PERUSPALVELUT GPS/GLONASST TRIMNET PLUS PALVELUT GPS/GLONASS/GALILEO/BEIDOU/ QZSS VRS Pro VRS Pro + cm VRS RTK VRS RTK + cm TARKKUUS VRS H-Star VRS H-Star + 10 cm VRS DGPS/DGNSS
TERRASOLID Terrasolidin ratkaisut UAVkartoitussovelluksiin Kimmo Soukki
 www.terrasolid.com TERRASOLID Terrasolidin ratkaisut UAVkartoitussovelluksiin Kimmo Soukki 20.9.2018 SOLUTIONS FOR DATA CAPTURE Terrasolid UAV Tekniikoista Terrasolid tuotteet Fotopistepilvet UAV LiDAR
www.terrasolid.com TERRASOLID Terrasolidin ratkaisut UAVkartoitussovelluksiin Kimmo Soukki 20.9.2018 SOLUTIONS FOR DATA CAPTURE Terrasolid UAV Tekniikoista Terrasolid tuotteet Fotopistepilvet UAV LiDAR
DIGIBONUSTEHTÄVÄ: JYRSINTÄ NCC INDUSTRY OY LOPPURAPORTTI
 DIGIBONUSTEHTÄVÄ: JYRSINTÄ NCC INDUSTRY OY LOPPURAPORTTI Tekijä: Marko Olli 16.10.2018 Sisällys 1 Johdanto...3 2 Hankkeen tavoitteet ja vaikuttavuus...3 3 Laitteisto ja mittaustarkkuus...3 4 Pilotointi
DIGIBONUSTEHTÄVÄ: JYRSINTÄ NCC INDUSTRY OY LOPPURAPORTTI Tekijä: Marko Olli 16.10.2018 Sisällys 1 Johdanto...3 2 Hankkeen tavoitteet ja vaikuttavuus...3 3 Laitteisto ja mittaustarkkuus...3 4 Pilotointi
Menetelmäkuvaus ja laadunvarmistus
 Menetelmäkuvaus ja laadunvarmistus Ortoilmakuvatulkinta: Seudullinen maanpeiteaineisto TP 35/14 Blom Kartta Oy; Pasilanraitio 5, 00240 Helsinki; puh 010 322 8940; fax 010 322 8941 etunimi.sukunimi@blomasa.com;
Menetelmäkuvaus ja laadunvarmistus Ortoilmakuvatulkinta: Seudullinen maanpeiteaineisto TP 35/14 Blom Kartta Oy; Pasilanraitio 5, 00240 Helsinki; puh 010 322 8940; fax 010 322 8941 etunimi.sukunimi@blomasa.com;
Tietomallityöskentelyn hyödyntäminen Liikennevirastossa
 Tietomallityöskentelyn hyödyntäminen Liikennevirastossa Kehto foorumi 10.11.2016 10.11.2016 Heikki Myllymäki / Tiina Perttula 10.11.2016 Heikki Myllymäki 2 Heikki Myllymäki 3 10.11.2016 Heikki Myllymäki
Tietomallityöskentelyn hyödyntäminen Liikennevirastossa Kehto foorumi 10.11.2016 10.11.2016 Heikki Myllymäki / Tiina Perttula 10.11.2016 Heikki Myllymäki 2 Heikki Myllymäki 3 10.11.2016 Heikki Myllymäki
Vt 13 pilotti: mallipohjaisen päällysteenkorjauksen suunnittelu ja toteutus
 Vt 13 pilotti: mallipohjaisen päällysteenkorjauksen suunnittelu ja toteutus Lähtökohdat Perinteinen päällysteen korjaus Lähtökohtana karkea maastomalli ja korjauksen suunnittelu sen pohjalta Lähtötietopoikkeamien
Vt 13 pilotti: mallipohjaisen päällysteenkorjauksen suunnittelu ja toteutus Lähtökohdat Perinteinen päällysteen korjaus Lähtökohtana karkea maastomalli ja korjauksen suunnittelu sen pohjalta Lähtötietopoikkeamien
HELSINGIN YLIOPISTO TIEDEKASVATUS. helsinki.fi/tiedekasvatus v 1.2
 Tässä harjoituksessa opit laatimaan luokitellun teemakartan maastossa aiemmin keräämästäsi aineistosta. Käytämme Esrin ArcGis-palvelun ilmaisia ominaisuuksia. Kartan tekoa voi harjoitella kokonaan ilman
Tässä harjoituksessa opit laatimaan luokitellun teemakartan maastossa aiemmin keräämästäsi aineistosta. Käytämme Esrin ArcGis-palvelun ilmaisia ominaisuuksia. Kartan tekoa voi harjoitella kokonaan ilman
Inframodel tiedonsiirto 23.8.2006
 Inframodel tiedonsiirto 23.8.2006 Inframodel 2 tiedonsiirto, yleistä Inframodel 2 -projekti valmistui maaliskuun 2006 lopussa. Projektissa määritettiin ja toteutettiin uusi menetelmä väylätietojen siirtoon
Inframodel tiedonsiirto 23.8.2006 Inframodel 2 tiedonsiirto, yleistä Inframodel 2 -projekti valmistui maaliskuun 2006 lopussa. Projektissa määritettiin ja toteutettiin uusi menetelmä väylätietojen siirtoon
DIGIBONUSTEHTÄVÄ: MPKJ NCC INDUSTRY OY LOPPURAPORTTI
 DIGIBONUSTEHTÄVÄ: MPKJ NCC INDUSTRY OY LOPPURAPORTTI Tekijä: Marko Olli 16.10.2018 Sisällys 1 Johdanto...3 2 Hankkeen tavoitteet ja vaikuttavuus...3 3 Laitteisto ja mittaustarkkuus...3 4 Pilotointi ja
DIGIBONUSTEHTÄVÄ: MPKJ NCC INDUSTRY OY LOPPURAPORTTI Tekijä: Marko Olli 16.10.2018 Sisällys 1 Johdanto...3 2 Hankkeen tavoitteet ja vaikuttavuus...3 3 Laitteisto ja mittaustarkkuus...3 4 Pilotointi ja
Built Environment Process Reengineering (PRE)
") Firstname Lastname RAKENNETTU YMPÄRISTÖ Tarvitaanko tätä palkkia? Built Environment Process Reengineering (PRE) InfraFINBIM PILOTTIPÄIVÄ nro 4, 9.5.2012 Tuotemallinnuksen käyttöönotto Vt 25 parantaminen
Firstname Lastname RAKENNETTU YMPÄRISTÖ Tarvitaanko tätä palkkia? Built Environment Process Reengineering (PRE) InfraFINBIM PILOTTIPÄIVÄ nro 4, 9.5.2012 Tuotemallinnuksen käyttöönotto Vt 25 parantaminen
Mikä on digitaalinen suunnitelma. Petri Niemi Finnmap Infra Oy
 Mikä on digitaalinen suunnitelma Petri Niemi Finnmap Infra Oy Taustaa Julkaistu 25.2.2016 23.8.2016 DIGITAALISTEN PÄÄLLYSTEURAKOIDEN TYÖPAJA 2 Digitaalinen päällystyssuunnitelma 23.8.2016 DIGITAALISTEN
Mikä on digitaalinen suunnitelma Petri Niemi Finnmap Infra Oy Taustaa Julkaistu 25.2.2016 23.8.2016 DIGITAALISTEN PÄÄLLYSTEURAKOIDEN TYÖPAJA 2 Digitaalinen päällystyssuunnitelma 23.8.2016 DIGITAALISTEN
YKSITTÄISTEN HEITTOJEN HALLINTA/KAS-ELY ANTERO AROLA
 7.9.2015 ANTERO AROLA TAUSTAA - rahoituksen vähenemisestä johtuen päällystysohjelmat ovat lyhentyneet ja työmenetelmät keventyneet - tien rakenteen parantamistyöt ovat käytännnössä jääneet hyvin vähäisiksi
7.9.2015 ANTERO AROLA TAUSTAA - rahoituksen vähenemisestä johtuen päällystysohjelmat ovat lyhentyneet ja työmenetelmät keventyneet - tien rakenteen parantamistyöt ovat käytännnössä jääneet hyvin vähäisiksi
Maa- ja kallioperämallit InfraFINBIM / Inframodel-kehitys
 Maa- ja kallioperämallit InfraFINBIM / Inframodel-kehitys Maa- ja kallioperämallit yhdyskuntasuunnittelussa ja rakentamisessa -työpaja 12.3.2014 Ympäristösi parhaat tekijät Sisältö Inframodel3 Inframodel4..5
Maa- ja kallioperämallit InfraFINBIM / Inframodel-kehitys Maa- ja kallioperämallit yhdyskuntasuunnittelussa ja rakentamisessa -työpaja 12.3.2014 Ympäristösi parhaat tekijät Sisältö Inframodel3 Inframodel4..5
Väinölänrannan asemakaavan näkymäanalyysi
 Väinölänrannan asemakaavan näkymäanalyysi Jyväskylän kaupunki Maankäyttö Eetu Lappalainen 21.10.2015 1 Lähtötilanne Näkymäanalyysin tarkoituksena oli tutkia, kuinka paljon olemassa olevien rakennusten
Väinölänrannan asemakaavan näkymäanalyysi Jyväskylän kaupunki Maankäyttö Eetu Lappalainen 21.10.2015 1 Lähtötilanne Näkymäanalyysin tarkoituksena oli tutkia, kuinka paljon olemassa olevien rakennusten
Miehittämättömän lennokin ottamien ilmakuvien käyttö energiakäyttöön soveltuvien biomassojen määrän nopeassa arvioinnissa
 Miehittämättömän lennokin ottamien ilmakuvien käyttö energiakäyttöön soveltuvien biomassojen määrän nopeassa arvioinnissa Anna Lopatina, Itä-Suomen yliopisto, Metsätieteiden osasto, Anna.lopatina@uef.fi
Miehittämättömän lennokin ottamien ilmakuvien käyttö energiakäyttöön soveltuvien biomassojen määrän nopeassa arvioinnissa Anna Lopatina, Itä-Suomen yliopisto, Metsätieteiden osasto, Anna.lopatina@uef.fi
Maanmittauslaitoksen laserkeilaustoiminta - uusi valtakunnallinen korkeusmalli laserkeilaamalla
 Maanmittauslaitoksen laserkeilaustoiminta - uusi valtakunnallinen korkeusmalli laserkeilaamalla Juha Vilhomaa Ilmakuvakeskus MAANMITTAUSLAITOS TIETOA MAASTA Korkeusmallityön taustalla: Yhteiskunnallinen
Maanmittauslaitoksen laserkeilaustoiminta - uusi valtakunnallinen korkeusmalli laserkeilaamalla Juha Vilhomaa Ilmakuvakeskus MAANMITTAUSLAITOS TIETOA MAASTA Korkeusmallityön taustalla: Yhteiskunnallinen
Public Account-tili on pysyvä, joten kannattaa käyttää mieluummin sitä kuin kaupallisen tilin kokeiluversiota.
 1.1 Tässä harjoituksessa opit laatimaan luokitellun teemakartan maastossa aiemmin keräämistäsi pisteistä. Käytämme Esrin ArcGis-palvelun ilmaisia ominaisuuksia. Kartan tekoa voi harjoitella kokonaan ilman
1.1 Tässä harjoituksessa opit laatimaan luokitellun teemakartan maastossa aiemmin keräämistäsi pisteistä. Käytämme Esrin ArcGis-palvelun ilmaisia ominaisuuksia. Kartan tekoa voi harjoitella kokonaan ilman
Sijainnin merkitys Itellassa GIS. Jakelun kehittämisen ajankohtaispäivä
 Jakelun kehittämisen ajankohtaispäivä Karttajärjestelmällä havainnollisuutta, tehokkuutta ja parempaa asiakaspalvelua Käytännön kokemuksia pilotoinneista ja käytössä olevista karttajärjestelmistä Juha
Jakelun kehittämisen ajankohtaispäivä Karttajärjestelmällä havainnollisuutta, tehokkuutta ja parempaa asiakaspalvelua Käytännön kokemuksia pilotoinneista ja käytössä olevista karttajärjestelmistä Juha
Päällysteiden YP tarvittavat tiedot 1. Työpaja ma
 Päällysteiden YP tarvittavat tiedot 1. Työpaja ma 16.04.2018 Sisältö Käytiin läpi yhdessä mistä vaiheista päällysteiden ylläpito muodostuu sekä millaisia erilaisia kipupisteitä näihin eri vaiheisiin liittyy.
Päällysteiden YP tarvittavat tiedot 1. Työpaja ma 16.04.2018 Sisältö Käytiin läpi yhdessä mistä vaiheista päällysteiden ylläpito muodostuu sekä millaisia erilaisia kipupisteitä näihin eri vaiheisiin liittyy.
PANK ry Tiemerkintäpäivät 12.-13.2.2015 Tampere Tiemerkintöjen ylläpidon tietopalvelun kehittäminen
 PANK ry Tiemerkintäpäivät 12.-13.2.2015 Tampere Tiemerkintöjen ylläpidon tietopalvelun kehittäminen 13.2.2015/Keijo Pulkkinen Sisältö Yleistä Tietopalvelukokonaisuus Kehittäminen OfficeAutori Tiedonsiirron
PANK ry Tiemerkintäpäivät 12.-13.2.2015 Tampere Tiemerkintöjen ylläpidon tietopalvelun kehittäminen 13.2.2015/Keijo Pulkkinen Sisältö Yleistä Tietopalvelukokonaisuus Kehittäminen OfficeAutori Tiedonsiirron
3D kaupunkimallit Internetissä Sova3D Oy Petri Kokko, CEO, Founder. Internet of Spaces
 3D kaupunkimallit Internetissä Sova3D Oy Petri Kokko, CEO, Founder SOVA3D IHMISET Petri Kokko - CEO, Partner 60% - M.Sc.Arch., SAFA - Yli 20 vuoden kokemus suunnittelu- ja mallinnusohjelmistoista ja sovelluksista
3D kaupunkimallit Internetissä Sova3D Oy Petri Kokko, CEO, Founder SOVA3D IHMISET Petri Kokko - CEO, Partner 60% - M.Sc.Arch., SAFA - Yli 20 vuoden kokemus suunnittelu- ja mallinnusohjelmistoista ja sovelluksista
Tietomallintaminen. Suunnittelun kipupisteet
 Tietomallintaminen Suunnittelun kipupisteet 25.10.2016 Tietomallinnus yhteiset pelisäännöt (YIV) edellytys eri järjestelmissä tuotetun tiedon yhdistämiseen (IInfraBIM-nimikkeistö) standardi tiedonsiirtoformaatit
Tietomallintaminen Suunnittelun kipupisteet 25.10.2016 Tietomallinnus yhteiset pelisäännöt (YIV) edellytys eri järjestelmissä tuotetun tiedon yhdistämiseen (IInfraBIM-nimikkeistö) standardi tiedonsiirtoformaatit
MAANINKA Silmusharju Maa-aineksen ottoalueen muinaisjäännösinventointi 2014
 1 MAANINKA Silmusharju Maa-aineksen ottoalueen muinaisjäännösinventointi 2014 Timo Sepänmaa Tilaaja: Jorma Hakola 2 Sisältö Kansikuva: Perustiedot... 2 Yleiskartta... 3 Inventointi... 4 Muinaisjäännös...
1 MAANINKA Silmusharju Maa-aineksen ottoalueen muinaisjäännösinventointi 2014 Timo Sepänmaa Tilaaja: Jorma Hakola 2 Sisältö Kansikuva: Perustiedot... 2 Yleiskartta... 3 Inventointi... 4 Muinaisjäännös...
Käyttöohje: Valuma-alueen määritys työkalun käyttö karttapalvelussa
 KÄYTTÖOHJE Valuma-alueen määritys 1 (10) Käyttöohje: Valuma-alueen määritys työkalun käyttö karttapalvelussa Sisällys Sisällys... 1 Alustus... 1 Käyttöönotto... 2 Toimintopainikkeet... 2 Karttatasot...
KÄYTTÖOHJE Valuma-alueen määritys 1 (10) Käyttöohje: Valuma-alueen määritys työkalun käyttö karttapalvelussa Sisällys Sisällys... 1 Alustus... 1 Käyttöönotto... 2 Toimintopainikkeet... 2 Karttatasot...
Laserkeilauksella kattavaa tietoa kaupunkimetsistä
 Laserkeilauksella kattavaa tietoa kaupunkimetsistä Topi Tanhuanpää HY, Metsätieteiden osasto / UEF, Historia- ja maantieteiden osasto Kaupunkimetsät: Mitä ne ovat? Kaupungissa ja sen laitamilla kasvavien
Laserkeilauksella kattavaa tietoa kaupunkimetsistä Topi Tanhuanpää HY, Metsätieteiden osasto / UEF, Historia- ja maantieteiden osasto Kaupunkimetsät: Mitä ne ovat? Kaupungissa ja sen laitamilla kasvavien
KONENÄÖN MAHDOLLISUUDET KATUJEN JA TEIDEN OMAISUUDEN HALLINTAAN
 KONENÄÖN MAHDOLLISUUDET KATUJEN JA TEIDEN OMAISUUDEN HALLINTAAN Petri Hienonen * * Lappeenranta University of Technology (LUT) Laboratory of Machine Vision and Pattern Recognition (MVPR) Kuntatekniikkapäivät
KONENÄÖN MAHDOLLISUUDET KATUJEN JA TEIDEN OMAISUUDEN HALLINTAAN Petri Hienonen * * Lappeenranta University of Technology (LUT) Laboratory of Machine Vision and Pattern Recognition (MVPR) Kuntatekniikkapäivät
Maanmittauslaitoksen ilmakuva- ja laserkeilausaineistot ktjkii-päivä
 Maanmittauslaitoksen ilmakuva- ja laserkeilausaineistot ktjkii-päivä 20.9.2011 Pentti Kupari Maanmittauslaitos, ilmakuvakeskus pentti.kupari@maanmittauslaitos.fi 1 MAANMITTAUSLAITOS TIETOA MAASTA Maanmittauslaitoksen
Maanmittauslaitoksen ilmakuva- ja laserkeilausaineistot ktjkii-päivä 20.9.2011 Pentti Kupari Maanmittauslaitos, ilmakuvakeskus pentti.kupari@maanmittauslaitos.fi 1 MAANMITTAUSLAITOS TIETOA MAASTA Maanmittauslaitoksen
LASERKEILAUS JA UUSI VALTAKUNNALLINEN KORKEUSMALLI-SEMINAARI Laserkeilausaineistojen sovelluksista
 LASERKEILAUS JA UUSI VALTAKUNNALLINEN KORKEUSMALLI-SEMINAARI 10.10.2008 Laserkeilausaineistojen sovelluksista Salon testiaineistoa on käytetty arvioitaessa alustavasti käyttökelpoisuutta: maaperäkartoituksessa
LASERKEILAUS JA UUSI VALTAKUNNALLINEN KORKEUSMALLI-SEMINAARI 10.10.2008 Laserkeilausaineistojen sovelluksista Salon testiaineistoa on käytetty arvioitaessa alustavasti käyttökelpoisuutta: maaperäkartoituksessa
Ilmanlaadun älykäs mallintaminen kaupunkiympäristössä. Lasse Johansson
 Ilmanlaadun älykäs mallintaminen kaupunkiympäristössä Lasse Johansson 16.8.2019 FMI-ENFUSER ilmanlaatumalli Paikallisen skaalan ilmanlaatumalli Tuottaa pääkaupunkiseudulle ennusteita 3/2018 lähtien osana
Ilmanlaadun älykäs mallintaminen kaupunkiympäristössä Lasse Johansson 16.8.2019 FMI-ENFUSER ilmanlaatumalli Paikallisen skaalan ilmanlaatumalli Tuottaa pääkaupunkiseudulle ennusteita 3/2018 lähtien osana
Pistepilvestä virtuaalimalliksi työpolku
 Pistepilvestä virtuaalimalliksi työpolku ProDigiOUs-hanke: Osallistava Virtuaalitodellisuus -työpaja 13.02.2018 Työryhmä: Hannu Kupila, Tero Markkanen, Jani Mäkinen, Kalle Tammi ja Toni Teittinen Työpolku
Pistepilvestä virtuaalimalliksi työpolku ProDigiOUs-hanke: Osallistava Virtuaalitodellisuus -työpaja 13.02.2018 Työryhmä: Hannu Kupila, Tero Markkanen, Jani Mäkinen, Kalle Tammi ja Toni Teittinen Työpolku
Metsien kaukokartoitus ja lentokonekeilaus Osio 2
 Metsien kaukokartoitus ja lentokonekeilaus Osio 2 Energiapuun tehokas käsittely ja kuivuminen Osio 1 Taimikoiden hoito ja nuorien metsien energiapuuvarojen hyödyntäminen Metsä työllistäjänä sekä energiapuun
Metsien kaukokartoitus ja lentokonekeilaus Osio 2 Energiapuun tehokas käsittely ja kuivuminen Osio 1 Taimikoiden hoito ja nuorien metsien energiapuuvarojen hyödyntäminen Metsä työllistäjänä sekä energiapuun
Parhalahden tuulivoimapuisto
 S U U N N IT T EL U JA T EK N IIK K A PUHURI OY Parhalahden tuulivoimapuisto Näkemäalueanalyysi ja valokuvasovitteet FCG SUUNNITTELU JA TEKNIIKKA OY P24972 FCG SUUNNITTELU JA TEKNIIKKA OY Näkymäalueanalyysi
S U U N N IT T EL U JA T EK N IIK K A PUHURI OY Parhalahden tuulivoimapuisto Näkemäalueanalyysi ja valokuvasovitteet FCG SUUNNITTELU JA TEKNIIKKA OY P24972 FCG SUUNNITTELU JA TEKNIIKKA OY Näkymäalueanalyysi
Automaattisen tiedontuotannon kokeilu: Tieverkon mobiililaserkeilaus, laadunvalvonta, tarkka tiegeometria
 Automaattisen tiedontuotannon kokeilu: Tieverkon mobiililaserkeilaus, laadunvalvonta, tarkka tiegeometria 1 Kokeilun tavoite 2 Kokeilun sisältö Kokeilun tavoitteena oli selvittää, voidaanko tarkkaa mobiililaserkeilausta
Automaattisen tiedontuotannon kokeilu: Tieverkon mobiililaserkeilaus, laadunvalvonta, tarkka tiegeometria 1 Kokeilun tavoite 2 Kokeilun sisältö Kokeilun tavoitteena oli selvittää, voidaanko tarkkaa mobiililaserkeilausta
Graniittirakennus Kallio Oy Taustaa. Tilaajien vaatimukset
 MANK PÄIVÄT 24.9.2015 Tietomallit työmaan näkökulmasta missä mennään uuden teknologian soveltamisessa Graniittirakennus Kallio Oy -2013 Taustaa Tilaajien vaatimukset Suurimpien tilaajien (suuret kunnat,
MANK PÄIVÄT 24.9.2015 Tietomallit työmaan näkökulmasta missä mennään uuden teknologian soveltamisessa Graniittirakennus Kallio Oy -2013 Taustaa Tilaajien vaatimukset Suurimpien tilaajien (suuret kunnat,
Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen
 Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen Mittausten laadun tarkastus ja muunnoskertoimien laskenta Kyösti Laamanen 2.0 4.10.2013 Prosito 1 (9) SISÄLTÖ 1 YLEISTÄ...
Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen Mittausten laadun tarkastus ja muunnoskertoimien laskenta Kyösti Laamanen 2.0 4.10.2013 Prosito 1 (9) SISÄLTÖ 1 YLEISTÄ...
Laboratorioraportti 3
 KON-C3004 Kone-ja rakennustekniikan laboratoriotyöt Laboratorioraportti 3 Laboratorioharjoitus 1B: Ruuvijohde Ryhmä S: Pekka Vartiainen 427971 Jari Villanen 69830F Anssi Petäjä 433978 Mittaustilanne Harjoituksessa
KON-C3004 Kone-ja rakennustekniikan laboratoriotyöt Laboratorioraportti 3 Laboratorioharjoitus 1B: Ruuvijohde Ryhmä S: Pekka Vartiainen 427971 Jari Villanen 69830F Anssi Petäjä 433978 Mittaustilanne Harjoituksessa