KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
|
|
|
- Tuulikki Alanen
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
1 KJR-C1001 Statiikka ja dynamiikka Luento Susanna Hurme
 Osaamistavoitteet Ymmärtää, miten yleinen tasoliike koostuu yhtäaikaisesta translaatio- ja rotaatioliikkeestä")


2 Yleisen tasoliikkeen kinematiikka: absoluuttinen ja suhteellinen liike, rajoitettu liike (Kirjan luvut ) Osaamistavoitteet Ymmärtää, miten yleinen tasoliike koostuu yhtäaikaisesta translaatio- ja rotaatioliikkeestä Osata analysoida yleistä tasoliikettä eri menetelmillä Absoluuttinen liike Suhteellinen liike Hetkellinen nopeusnapa Ymmärtää, mitä kinemaattiset rajoitteet ovat ja miten ne huomioidaan kappaleen liikkeen analysoinnissa Sisältö Absoluuttinen liike: muodostetaan pisteen translaation ja kappaleen rotaation välinen matemaattinen yhteys Määritellään suhteellinen nopeus Nopeusanalyysi hetkellisen nopeusnavan avulla Määritellään suhteellinen kiihtyvyys

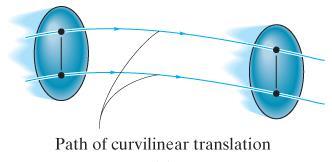
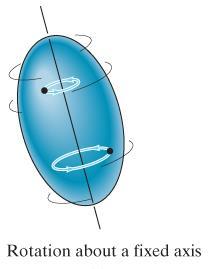
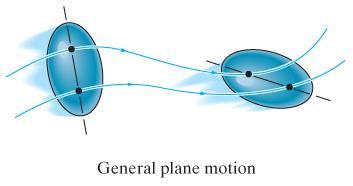
3 Jäykän kappaleen tasoliike
4 Absoluuttinen liike (Kirjan luku 16.4) Kappaleen tasoliike voidaan täysin määritellä, kun tunnetaan kappaleen jonkin viivan rotaatioliike sekä kappaleen jonkin pisteen translaatioliike. Joskus näille liikkeille voidaan määritellä yhteys kappaleen geometrian avulla. α ω A B = rθ ds G dt = d dt rθ = r dθ dt G B s G r θ A A G A B = AB = s G s G = rθ v G = rω dv G dt = r dω dt a G = rα
5 Absoluuttinen liike (Kirjan luku 16.4) Myös kappalesysteemin liikettä voidaan tarkastella määrittämällä geometrian avulla yhteys translaatiossa tai rotaatiossa olevan kappaleen, ja yleisessä tasoliikkeessä olevan kappaleen välille. Mikä on sauvan AB kulma-asema pystysuoran koordinaatin y funktiona, kun ohjuri liikkuu ylöspäin? y = (0.3m) cosθ Mikä on sauvan AB kulmanopeus, kun ohjurin nopeus on 2 m/s ylöspäin, ja kulma θ = 50? d dt y = d (0.3m) cosθ dt Yhdistetyn funktion derivaatta! v = 0.3m d dt cosθ = 0.3m d dθ cosθ dθ dt = 0.3m sinθ ω
6 Absoluuttinen liike (Kirjan luku 16.4) ω = 2m/s 0.3m sin50 = 8.7 rad s Mikä on sauvan AB kulmakiihtyvyys, kun ohjurin kiihtyvyys on 3 m/s 2 ylöspäin, ja kulma θ = 50? v = 0.3m sinθ ω Tulon derivaatta! dv dt = 0.3m d dt sinθ ω = 0.3m ω d dt sinθ + sinθ dω dt Yhdistetyn funktion derivaatta! a = 0.3m ω cosθω + sinθ α = (0.3m)(ω 2 cosθ + αsinθ) α = 3 m s 2 rad m s sin50 2 cos50 = 50.5 rad s 2
7 Suhteellinen liike nopeus (Kirjan luku 16.5) Yleinen tasoliike voidaan kuvata tarkastelemalla liikkeen translaatio- ja rotaatiokomponentteja erikseen. r B = r A + r B/A dr B = dr A + dr B/A
8 Suhteellinen liike nopeus (Kirjan luku 16.5) dr B dt = dr A dt + dr B/A dt v B = v A + v B/A v B = v A + ω r B/A
9 Suhteellinen liike nopeus (Kirjan luku 16.5) v Ay r A/B x v A = v B + ω r A/B v Ax i + v Ay j = 0 + ωk r A/B ( sin θ i + cos θ j) v Ax HUOM! Yksikkövektoreiden ristitulo. Tehtävässä y-akseli osoittaa alaspäin. k i v Ax i + v Ay j = ωr A/B ( sin θ j cos θ i) Jotta vektorit ovat yhtä suuret, i- ja j- komponenttien on oltava yhtä suuret. j Kinemaattinen rajoite: v Ay = v = 2 m s j (2m/s) = ω(0.3m)( sin 50 ) ω = 8.7 rad/s v Ax = ωr A/B cos θ = 8.7rad/s 0.3m cos 50 = 1.68 m/s
 Nopeus tietyllä hetkellä voidaan määrittää helposti valitsemalla referenssipisteeksi A hetkellinen nopeusnapa (instantaneous center of zero")
10 Hetkellinen nopeusnapa (Kirjan luku 16.6) Nopeus tietyllä hetkellä voidaan määrittää helposti valitsemalla referenssipisteeksi A hetkellinen nopeusnapa (instantaneous center of zero velocity, IC). Se on piste, jonka nopeus kyseisellä hetkellä on nolla. = 0 v B = v IC + ω r B/IC = ω r B/IC v B = ωr B/IC
 IC:n paikan määrittäminen onnistuu, kun pidetään")


11 Hetkellinen nopeusnapa (Kirjan luku 16.6) IC:n paikan määrittäminen onnistuu, kun pidetään mielessä: v B = ω r B/IC : v B = ωr B/IC : Nopeusvektori on aina kohtisuorassa paikkavektoria vastaan. Paikkavektorin pituus tunnetaan, jos nopeus ja kulmanopeus tunnetaan. v B 2m d v B r B/IC IC r B/IC IC IC r B/IC v B d v A
12 Suhteellinen liike kiihtyvyys (Kirjan luku 16.7) v B = v A + v B/A dv B dt = dv A dt + dv B/A dt a B = a A + (a B/A ) t +(a B/A ) n = +
 a B = a A + (a B/A ) t +(a B/A ) n Kinemaattiset rajoitteet: (a B/A ) t = α r B/A (a B/A")
13 Suhteellinen liike kiihtyvyys (Kirjan luku 16.7) a B = a A + (a B/A ) t +(a B/A ) n Kinemaattiset rajoitteet: (a B/A ) t = α r B/A (a B/A ) n = ω 2 r B/A a B = a A + α r B/A ω 2 r B/A
 a (B/A)t a A = rα = 2m 2 rad s 2 = 4 m s 2 a A = a A i = 4 m s 2 i y r B/A a (B/A)n a A r B/A = 2m cos 45 i + sin 45 j = 2i + 2j m a (B/A)t = α r B/A x = 2 rad ( k) 2i + s2 2j m = 2 2 m (j + i) s2")
14 Suhteellinen liike kiihtyvyys (Kirjan luku 16.7) a (B/A)t a A = rα = 2m 2 rad s 2 = 4 m s 2 a A = a A i = 4 m s 2 i y r B/A a (B/A)n a A r B/A = 2m cos 45 i + sin 45 j = 2i + 2j m a (B/A)t = α r B/A x = 2 rad ( k) 2i + s2 2j m = 2 2 m (j + i) s2 a B = a A + a B/A = a A + a (B/A)t + a (B/A)n a (B/A)n = ω 2 r B/A = a A + α AB r B/A ω 2 r B/A = 4rad/s 2 2i + 2j m a Bx i + a By j = a A i + a (B/A)tx i + a (B/A)ty j + a (B/A)nx i + a (B/A)ny j = 16 2 m (i j) s2 i: a Bx = a A + a (B/A)tx + a (B/A)nx = ( ) m s m s 2 j: a By = a (B/A)ty + a (B/A)ny = m s m s 2
 m s 2 = a (B/A)ty j + a (B/A)tx i a (B/A)n = ω 2 r B/A x a B = a A + a B/A = a A + a (B/A)t + a (B/A)n = a A + α AB r B/A ω 2 r B/A = 1.15rad/s 2 (2m)( cos 30 i sin 30 j) = 2.")
15 Suhteellinen liike kiihtyvyys (Kirjan luku 16.7) a An r A a (B/A)t = α AB r B/A = α AB k (2m)( cos 30 i sin 30 j) y a B α AB r B/A a At = (1.7321α AB j α AB i) m s 2 = a (B/A)ty j + a (B/A)tx i a (B/A)n = ω 2 r B/A x a B = a A + a B/A = a A + a (B/A)t + a (B/A)n = a A + α AB r B/A ω 2 r B/A = 1.15rad/s 2 (2m)( cos 30 i sin 30 j) = m s 2 i m s 2 j = a (B/A)nx i + a (B/A)ny j a A = a At + a An = α r A ω 2 r A = 8 rad s 2 k 0.5m i 4 rad s 2 ( 0.5m i) a Bx i + 0j = {8i 4j α AB i α AB j i j} m s 2 j: 0 = ( α AB ) m s 2 α AB = rad s 2 = 4 m s 2 j + 8 m s 2 i = a Ay j + a Ax i i: a Bx = ( ) m s m s 2
16 Yhteenveto α ω Tarkastelimme yleistä tasoliikettä absoluuttisen ja suhteellisen liikkeen menetelmillä Määrittelimme yhteyden kappaleen pisteen translaatiolle ja kappaleen rotaatiolle, eli tarkastelimme absoluuttista liikettä Määrittelimme pisteen nopeuden ja kiihtyvyyden translaation ja suhteellisen rotaation summana, eli tarkastelimme suhteellista liikettä Nopeuden määrittämiseen tietyllä hetkellä voidaan käyttää hetkellistä nopeusnapaa, IC Yhtälöt yksinkertaisia G B s G r θ A A G
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 31.3.2016 Susanna Hurme Dynamiikan välikoe 4.4.2016 Ajankohta ma 4.4.2016 klo 16:30 19:30 Salijako Aalto-Sali: A-P (sukunimen alkukirjaimen mukaan) Ilmoittautuminen
KJR-C1001 Statiikka ja dynamiikka Luento 31.3.2016 Susanna Hurme Dynamiikan välikoe 4.4.2016 Ajankohta ma 4.4.2016 klo 16:30 19:30 Salijako Aalto-Sali: A-P (sukunimen alkukirjaimen mukaan) Ilmoittautuminen
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 22.3.2016 Susanna Hurme Päivän aihe: Rotaatioliikkeen kinematiikka: kulmanopeus ja -kiihtyvyys (Kirjan luvut 12.7, 16.3) Osaamistavoitteet Osata analysoida jäykän
KJR-C1001 Statiikka ja dynamiikka Luento 22.3.2016 Susanna Hurme Päivän aihe: Rotaatioliikkeen kinematiikka: kulmanopeus ja -kiihtyvyys (Kirjan luvut 12.7, 16.3) Osaamistavoitteet Osata analysoida jäykän
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 30.3.2016 Susanna Hurme Yleisen tasoliikkeen kinetiikka (Kirjan luku 17.5) Osaamistavoitteet Osata ratkaista voimia ja niiden aiheuttamia kiihtyvyyksiä tasoliikkeessä
KJR-C1001 Statiikka ja dynamiikka Luento 30.3.2016 Susanna Hurme Yleisen tasoliikkeen kinetiikka (Kirjan luku 17.5) Osaamistavoitteet Osata ratkaista voimia ja niiden aiheuttamia kiihtyvyyksiä tasoliikkeessä
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
Luento 5: Käyräviivainen liike. Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat θ, ω ja α Yhdistetty liike
 Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat θ, ω ja α Yhdistetty liike 1 / 29 Luennon sisältö Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat
Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat θ, ω ja α Yhdistetty liike 1 / 29 Luennon sisältö Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat
Luento 3: Käyräviivainen liike
 Luento 3: Käyräviivainen liike Kertausta viime viikolta Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat θ, ω ja α Yhdistetty liike Luennon sisältö Kertausta viime viikolta Käyräviivainen liike
Luento 3: Käyräviivainen liike Kertausta viime viikolta Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat θ, ω ja α Yhdistetty liike Luennon sisältö Kertausta viime viikolta Käyräviivainen liike
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 23.3.2016 Susanna Hurme Rotaatioliikkeen kinetiikka: hitausmomentti ja liikeyhtälöt (Kirjan luvut 17.1, 17.2 ja 17.4) Osaamistavoitteet Ymmärtää hitausmomentin
KJR-C1001 Statiikka ja dynamiikka Luento 23.3.2016 Susanna Hurme Rotaatioliikkeen kinetiikka: hitausmomentti ja liikeyhtälöt (Kirjan luvut 17.1, 17.2 ja 17.4) Osaamistavoitteet Ymmärtää hitausmomentin
Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia
 Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa 1 / 31 Luennon sisältö Suhteellinen translaatioliike
Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa 1 / 31 Luennon sisältö Suhteellinen translaatioliike
Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia
 Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Pyörimisliikkeestä Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia Luennon sisältö Suhteellinen translaatioliike
Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Pyörimisliikkeestä Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia Luennon sisältö Suhteellinen translaatioliike
4 Kaksi- ja kolmiulotteinen liike
 Mansfield and O Sullivan: Understandin physics, painos 1999, kpl 4. Näitä löytyy myös Youn and Freedman: University physics -teoksen luvuissa 4, osin myös luvuissa 3 ja 5. 4 Kaksi- ja kolmiulotteinen liike
Mansfield and O Sullivan: Understandin physics, painos 1999, kpl 4. Näitä löytyy myös Youn and Freedman: University physics -teoksen luvuissa 4, osin myös luvuissa 3 ja 5. 4 Kaksi- ja kolmiulotteinen liike
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 24.3.2016 Susanna Hurme Rotaatioliikkeen liike-energia, teho ja energiaperiaate (Kirjan luku 18) Osaamistavoitteet Ymmärtää, miten liike-energia määritetään kiinteän
KJR-C1001 Statiikka ja dynamiikka Luento 24.3.2016 Susanna Hurme Rotaatioliikkeen liike-energia, teho ja energiaperiaate (Kirjan luku 18) Osaamistavoitteet Ymmärtää, miten liike-energia määritetään kiinteän
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 24.2.2016 Susanna Hurme Päivän aihe: Voiman momentin käsite (Kirjan luvut 4.1-4.6) Mikä on voiman momentti? Määritetään momentti skalaari- ja vektorimuodossa Opitaan
KJR-C1001 Statiikka ja dynamiikka Luento 24.2.2016 Susanna Hurme Päivän aihe: Voiman momentin käsite (Kirjan luvut 4.1-4.6) Mikä on voiman momentti? Määritetään momentti skalaari- ja vektorimuodossa Opitaan
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 16.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinetiikka (Kirjan luvut 12.6, 13.1-13.3 ja 17.3) Oppimistavoitteet Ymmärtää, miten Newtonin toisen lain
KJR-C1001 Statiikka ja dynamiikka Luento 16.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinetiikka (Kirjan luvut 12.6, 13.1-13.3 ja 17.3) Oppimistavoitteet Ymmärtää, miten Newtonin toisen lain
Luento 3: Käyräviivainen liike
 Luento 3: Käyräviivainen liike Kertausta viime viikolta Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat,! ja Yhdistetty liike 2015-09-14 13:50:32 1/40 luentokalvot_03_combined.pdf (#36) Luennon
Luento 3: Käyräviivainen liike Kertausta viime viikolta Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat,! ja Yhdistetty liike 2015-09-14 13:50:32 1/40 luentokalvot_03_combined.pdf (#36) Luennon
Jakso 1: Pyörimisliikkeen kinematiikkaa, hitausmomentti
 Jakso 1: Pyörimisliikkeen kinematiikkaa, hitausmomentti Kertausta Ympyrärataa kiertävälle kappaleelle on määritelty käsitteet kulmanopeus ja kulmakiihtyvyys seuraavasti: ω = dθ dt dω ja α = dt Eli esimerkiksi
Jakso 1: Pyörimisliikkeen kinematiikkaa, hitausmomentti Kertausta Ympyrärataa kiertävälle kappaleelle on määritelty käsitteet kulmanopeus ja kulmakiihtyvyys seuraavasti: ω = dθ dt dω ja α = dt Eli esimerkiksi
Luento 5: Käyräviivainen liike
 Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat,! ja Yhdistetty liike Ajankohtaista Konseptitesti 1 http://presemo.aalto.fi/mekaniikka2017 Kysymys Sotalaivasta
Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat,! ja Yhdistetty liike Ajankohtaista Konseptitesti 1 http://presemo.aalto.fi/mekaniikka2017 Kysymys Sotalaivasta
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 23.2.2016 Susanna Hurme Tervetuloa kurssille! Mitä on statiikka? Mitä on dynamiikka? Miksi niitä opiskellaan? Päivän aihe: Voiman käsite ja partikkelin tasapaino
KJR-C1001 Statiikka ja dynamiikka Luento 23.2.2016 Susanna Hurme Tervetuloa kurssille! Mitä on statiikka? Mitä on dynamiikka? Miksi niitä opiskellaan? Päivän aihe: Voiman käsite ja partikkelin tasapaino
Luento 5: Käyräviivainen liike
 Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat,! ja Yhdistetty liike Ajankohtaista Konseptitesti 1 Kysymys Viereisessä kuvassa leppäkerttu istuu karusellissa,
Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat,! ja Yhdistetty liike Ajankohtaista Konseptitesti 1 Kysymys Viereisessä kuvassa leppäkerttu istuu karusellissa,
ELEC-A3110 Mekaniikka (5 op)
") ELEC-A3110 Mekaniikka (5 op) Yliopistonlehtori, tkt Sami Kujala Mikro- ja nanotekniikan laitos Syksy 2016 1 / 21 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia
ELEC-A3110 Mekaniikka (5 op) Yliopistonlehtori, tkt Sami Kujala Mikro- ja nanotekniikan laitos Syksy 2016 1 / 21 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 10.3.2016 Susanna Hurme Statiikan välikoe 14.3.2016 Ajankohta ma 14.3.2016 klo 14:15 17:15 Salijako Aalto-Sali: A-Q (sukunimen alkukirjaimen mukaan) Ilmoittautuminen
KJR-C1001 Statiikka ja dynamiikka Luento 10.3.2016 Susanna Hurme Statiikan välikoe 14.3.2016 Ajankohta ma 14.3.2016 klo 14:15 17:15 Salijako Aalto-Sali: A-Q (sukunimen alkukirjaimen mukaan) Ilmoittautuminen
Fysiikka ei kerro lopullisia totuuksia. Jokin uusi havainto voi vaatia muuttamaan teorioita.
 766323A Mekaniikka Mansfield and O Sullivan: Understanding physics kpl 1 ja 2. Näitä löytyy myös Young and Freedman: University physics -teoksen luvuissa 2 ja 3, s. 40-118. Johdanto Fysiikka on perustiede.
766323A Mekaniikka Mansfield and O Sullivan: Understanding physics kpl 1 ja 2. Näitä löytyy myös Young and Freedman: University physics -teoksen luvuissa 2 ja 3, s. 40-118. Johdanto Fysiikka on perustiede.
DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi
 Arttu Polojärvi") DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Suhteellisen liikkeen nopeuden ja kiihtyvyyden yhtälöt. Jäykän kappaleen partikkelin liike. Jäykän
DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Suhteellisen liikkeen nopeuden ja kiihtyvyyden yhtälöt. Jäykän kappaleen partikkelin liike. Jäykän
Kinematiikka -1- K09A,B&C Harjoitustehtäviä Kevät 2010 PARTIKKELI. Suoraviivainen liike
 Kinematiikka -1- K09A,B&C Harjoitustehtäviä Kevät 010 PARTIKKELI Suoraviivainen liike 1. Suoraviivaisessa liikkeessä olevan partikkelin asema on (järjestelmä m, s) 3 x ( = t 15t + 36t 10. Laske a) partikkelin
Kinematiikka -1- K09A,B&C Harjoitustehtäviä Kevät 010 PARTIKKELI Suoraviivainen liike 1. Suoraviivaisessa liikkeessä olevan partikkelin asema on (järjestelmä m, s) 3 x ( = t 15t + 36t 10. Laske a) partikkelin
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 17.3.2016 Susanna Hurme Päivän aihe: Energian, työn ja tehon käsitteet sekä energiaperiaate (Kirjan luku 14) Osaamistavoitteet: Osata tarkastella partikkelin kinetiikkaa
KJR-C1001 Statiikka ja dynamiikka Luento 17.3.2016 Susanna Hurme Päivän aihe: Energian, työn ja tehon käsitteet sekä energiaperiaate (Kirjan luku 14) Osaamistavoitteet: Osata tarkastella partikkelin kinetiikkaa
x n e x dx = n( e x ) nx n 1 ( e x ) = x n e x + ni n 1 x 4 e x dx = x 4 e x +4( x 3 e x +3( x 2 e x +2( xe x e x ))) = e x
 nx n 1 ( e x ) = x n e x + ni n 1 x 4 e x dx = x 4 e x +4( x 3 e x +3( x 2 e x +2( xe x e x ))) = e x") Osittaisintegrointia käyttäen osoita integraalille I n x n e x dx oikeaksi reduktiokaava I n x n e x + ni n ja laske sen avulla mitä on I 4 kun x. x n e x dx n( e x ) nx n ( e x ) x n e x + ni n x 4 e
Osittaisintegrointia käyttäen osoita integraalille I n x n e x dx oikeaksi reduktiokaava I n x n e x + ni n ja laske sen avulla mitä on I 4 kun x. x n e x dx n( e x ) nx n ( e x ) x n e x + ni n x 4 e
DYNAMIIKKA II, LUENTO 2 (SYKSY 2015) Arttu Polojärvi
 Arttu Polojärvi") DYNAMIIKKA II, LUENTO 2 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertaus edelliseltä luennolta sekä ristituloista. Mekaniikan koordinaatistot: pallokoordinaatisto. Vakiovektorin muutosnopeus (kantavektorin
DYNAMIIKKA II, LUENTO 2 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertaus edelliseltä luennolta sekä ristituloista. Mekaniikan koordinaatistot: pallokoordinaatisto. Vakiovektorin muutosnopeus (kantavektorin
DYNAMIIKKA II, LUENTO 4 (SYKSY 2015) Arttu Polojärvi
 Arttu Polojärvi") DYNAMIIKKA II, LUENTO 4 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta: jäykkä kappale, kulma-asema, Eulerin kulmat, kulmanopeus. Suhteellinen liike: Vektorin muutosnopeudet eri koordinaatistoissa.
DYNAMIIKKA II, LUENTO 4 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta: jäykkä kappale, kulma-asema, Eulerin kulmat, kulmanopeus. Suhteellinen liike: Vektorin muutosnopeudet eri koordinaatistoissa.
Nopeus, kiihtyvyys ja liikemäärä Vektorit
 Nopeus, kiihtyvyys ja liikemäärä Vektorit Luento 2 https://geom.mathstat.helsinki.fi/moodle/course/view.php?id=360 Luennon tavoitteet: Vektorit tutuiksi Koordinaatiston valinta Vauhdin ja nopeuden ero
Nopeus, kiihtyvyys ja liikemäärä Vektorit Luento 2 https://geom.mathstat.helsinki.fi/moodle/course/view.php?id=360 Luennon tavoitteet: Vektorit tutuiksi Koordinaatiston valinta Vauhdin ja nopeuden ero
x + 1 πx + 2y = 6 2y = 6 x 1 2 πx y = x 1 4 πx Ikkunan pinta-ala on suorakulmion ja puoliympyrän pinta-alojen summa, eli
 BM0A5810 - Differentiaalilaskenta ja sovellukset Harjoitus, Syksy 015 1. a) Funktio f ) = 1) vaihtaa merkkinsä pisteissä = 1, = 0 ja = 1. Lisäksi se on pariton funktio joten voimme laskea vain pinta-alan
BM0A5810 - Differentiaalilaskenta ja sovellukset Harjoitus, Syksy 015 1. a) Funktio f ) = 1) vaihtaa merkkinsä pisteissä = 1, = 0 ja = 1. Lisäksi se on pariton funktio joten voimme laskea vain pinta-alan
Suorat ja tasot, L6. Suuntajana. Suora xy-tasossa. Suora xyzkoordinaatistossa. Taso xyzkoordinaatistossa. Tason koordinaattimuotoinen yhtälö.
 Suorat ja tasot, L6 Suora xyz-koordinaatistossa Taso xyz-koordinaatistossa stä stä 1 Näillä kalvoilla käsittelemme kolmen laisia olioita. Suora xyz-avaruudessa. Taso xyz-avaruudessa. Emme nyt ryhdy pohtimaan,
Suorat ja tasot, L6 Suora xyz-koordinaatistossa Taso xyz-koordinaatistossa stä stä 1 Näillä kalvoilla käsittelemme kolmen laisia olioita. Suora xyz-avaruudessa. Taso xyz-avaruudessa. Emme nyt ryhdy pohtimaan,
ELEC-A3110 Mekaniikka (5 op)
") Yliopistonlehtori, tkt Sami Kujala Syksy 2016 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia Ajankohtaista Presemokyselyn poimintoja Millä odotuksilla aloitat
Yliopistonlehtori, tkt Sami Kujala Syksy 2016 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia Ajankohtaista Presemokyselyn poimintoja Millä odotuksilla aloitat
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 25.2.2016 Susanna Hurme Päivän aihe: Voimasysteemien samanarvoisuus ja jakaantuneen voiman käsite (Kirjan luvut 4.7-4.9) Osaamistavoitteet: 1. Ymmärtää, mikä on
KJR-C1001 Statiikka ja dynamiikka Luento 25.2.2016 Susanna Hurme Päivän aihe: Voimasysteemien samanarvoisuus ja jakaantuneen voiman käsite (Kirjan luvut 4.7-4.9) Osaamistavoitteet: 1. Ymmärtää, mikä on
Luento 7: Pyörimisliikkeen dynamiikkaa
 Luento 7: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Harjoituksia ja laskettuja esimerkkejä 1 / 37 Luennon sisältö Johdanto
Luento 7: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Harjoituksia ja laskettuja esimerkkejä 1 / 37 Luennon sisältö Johdanto
Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia
 Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Pyörimisliikkeestä Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa Konseptitesti 1 Kysymys
Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Pyörimisliikkeestä Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa Konseptitesti 1 Kysymys
Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia
 Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa Ajankohtaista FuksiProffaBuffa Järjestetään
Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa Ajankohtaista FuksiProffaBuffa Järjestetään
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 3: Vektorikentät
 MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 3: Vektorikentät Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 2016 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2016
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 3: Vektorikentät Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 2016 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2016
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys10 Kevät 010 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
Mekaniikan jatkokurssi Fys10 Kevät 010 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys10 Syksy 009 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
Mekaniikan jatkokurssi Fys10 Syksy 009 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
ELEC-A3110 Mekaniikka (5 op)
") ELEC-A3110 Mekaniikka (5 op) Yliopistonlehtori, tkt Sami Kujala Elektroniikan ja nanotekniikan laitos (ELE) Syksy 2017 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia
ELEC-A3110 Mekaniikka (5 op) Yliopistonlehtori, tkt Sami Kujala Elektroniikan ja nanotekniikan laitos (ELE) Syksy 2017 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia
ELEC C4140 Kenttäteoria (syksy 2015)
") ELEC C4140 Kenttäteoria (syksy 2015) Henrik Wallén Luentoviiko 3 / versio 23. syyskuuta 2015 Vektorianalyysi (Ulaby, luku 3) Koordinaatistot Viiva-, pinta- ja tilavuusalkiot Koordinaattimuunnokset Nablaoperaatiot
ELEC C4140 Kenttäteoria (syksy 2015) Henrik Wallén Luentoviiko 3 / versio 23. syyskuuta 2015 Vektorianalyysi (Ulaby, luku 3) Koordinaatistot Viiva-, pinta- ja tilavuusalkiot Koordinaattimuunnokset Nablaoperaatiot
BM20A5800 Funktiot, lineaarialgebra ja vektorit Harjoitus 4, Syksy 2016
 BM20A5800 Funktiot, lineaarialgebra ja vektorit Harjoitus 4, Syksy 2016 1. Hahmottele karkeasti funktion f : R R 2 piirtämällä sen arvoja muutamilla eri muuttujan arvoilla kaksiulotteiseen koordinaatistoon
BM20A5800 Funktiot, lineaarialgebra ja vektorit Harjoitus 4, Syksy 2016 1. Hahmottele karkeasti funktion f : R R 2 piirtämällä sen arvoja muutamilla eri muuttujan arvoilla kaksiulotteiseen koordinaatistoon
Kerrataan harmoninen värähtelijä Noste, nesteen ja kaasun aiheuttamat voimat Noste ja harmoninen värähtelijä (laskaria varten)
") Noste Ympyräliike I Luennon tavoitteet Kerrataan harmoninen värähtelijä Noste, nesteen ja kaasun aiheuttamat voimat Noste ja harmoninen värähtelijä (laskaria varten) Aloitetaan ympyräliikettä Keskeisvoiman
Noste Ympyräliike I Luennon tavoitteet Kerrataan harmoninen värähtelijä Noste, nesteen ja kaasun aiheuttamat voimat Noste ja harmoninen värähtelijä (laskaria varten) Aloitetaan ympyräliikettä Keskeisvoiman
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 2.3.2016 Susanna Hurme äivän aihe: Staattisesti määrätyn rakenteen tukireaktiot (Kirjan luvut 5.7 ja 6.6) Osaamistavoitteet: Ymmärtää, mitä tarkoittaa staattisesti
KJR-C1001 Statiikka ja dynamiikka Luento 2.3.2016 Susanna Hurme äivän aihe: Staattisesti määrätyn rakenteen tukireaktiot (Kirjan luvut 5.7 ja 6.6) Osaamistavoitteet: Ymmärtää, mitä tarkoittaa staattisesti
LUKU 10. Yhdensuuntaissiirto
 LUKU hdensuuntaissiirto Olkoot (M, N) suunnistettu pinta, p M ja v p R 3 p annettu vektori pisteessä p (vektorin v p ei tarvitse olla pinnan M tangenttivektori). Tällöin vektori (v p N(p)) N(p) on vektorin
LUKU hdensuuntaissiirto Olkoot (M, N) suunnistettu pinta, p M ja v p R 3 p annettu vektori pisteessä p (vektorin v p ei tarvitse olla pinnan M tangenttivektori). Tällöin vektori (v p N(p)) N(p) on vektorin
Ei-inertiaaliset koordinaatistot
 orstai 25.9.2014 1/17 Ei-inertiaaliset koordinaatistot Tarkastellaan seuraavaa koordinaatistomuunnosta: {x} = (x 1, x 2, x 3 ) {y} = (y 1, y 2, y 3 ) joille valitaan kantavektorit: {x} : (î, ĵ, ˆk) {y}
orstai 25.9.2014 1/17 Ei-inertiaaliset koordinaatistot Tarkastellaan seuraavaa koordinaatistomuunnosta: {x} = (x 1, x 2, x 3 ) {y} = (y 1, y 2, y 3 ) joille valitaan kantavektorit: {x} : (î, ĵ, ˆk) {y}
766323A Mekaniikka, osa 2, kl 2015 Harjoitus 4
 766323A Mekaniikka, osa 2, kl 2015 Harjoitus 4 0. MUISTA: Tenttitehtävä tulevassa päätekokeessa: Fysiikan säilymislait ja symmetria. (Tästä tehtävästä voi saada tentissä kolme ylimääräistä pistettä. Nämä
766323A Mekaniikka, osa 2, kl 2015 Harjoitus 4 0. MUISTA: Tenttitehtävä tulevassa päätekokeessa: Fysiikan säilymislait ja symmetria. (Tästä tehtävästä voi saada tentissä kolme ylimääräistä pistettä. Nämä
MATEMATIIKAN PERUSKURSSI I Harjoitustehtäviä syksy Millä reaaliluvun x arvoilla. 3 4 x 2,
 MATEMATIIKAN PERUSKURSSI I Harjoitustehtäviä syksy 6. Millä reaaliluvun arvoilla a) 9 =, b) + + + 4, e) 5?. Kirjoita Σ-merkkiä käyttäen summat 4, a) + 4 + 6 + +, b) 8 + 4 6 + + n n, c) + + +
MATEMATIIKAN PERUSKURSSI I Harjoitustehtäviä syksy 6. Millä reaaliluvun arvoilla a) 9 =, b) + + + 4, e) 5?. Kirjoita Σ-merkkiä käyttäen summat 4, a) + 4 + 6 + +, b) 8 + 4 6 + + n n, c) + + +
Derivoimalla kerran saadaan nopeus ja toisen kerran saadaan kiihtyvyys Ña r
 Vuka HT 4 Tehtävä. Lyhyenä alustuksena tehtävään johdetaan keskeiskiihtyvyys tasaisessa pyörimisessä. Meillä on ympyräradalla liikkuva kappale joka pyörii vakiokulmanopeudella ω dϕ säteellä r origosta.
Vuka HT 4 Tehtävä. Lyhyenä alustuksena tehtävään johdetaan keskeiskiihtyvyys tasaisessa pyörimisessä. Meillä on ympyräradalla liikkuva kappale joka pyörii vakiokulmanopeudella ω dϕ säteellä r origosta.
Luento 7: Pyörimisliikkeen dynamiikkaa
 Luento 7: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Laskettuja esimerkkejä Luennon sisältö Johdanto Vääntömomentti Hitausmomentti
Luento 7: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Laskettuja esimerkkejä Luennon sisältö Johdanto Vääntömomentti Hitausmomentti
Tehtävä 4.7 Tarkastellaan hiukkasta, joka on pakotettu liikkumaan toruksen pinnalla.
 Tehtävä.7 Tarkastellaan hiukkasta, joka on pakotettu liikkumaan toruksen pinnalla. x = (a + b cos(θ)) cos(ψ) y = (a + b cos(θ)) sin(ψ) = b sin(θ), a > b, θ π, ψ π Figure. Toruksen hajoituskuva Oletetaan,
Tehtävä.7 Tarkastellaan hiukkasta, joka on pakotettu liikkumaan toruksen pinnalla. x = (a + b cos(θ)) cos(ψ) y = (a + b cos(θ)) sin(ψ) = b sin(θ), a > b, θ π, ψ π Figure. Toruksen hajoituskuva Oletetaan,
l 1 2l + 1, c) 100 l=0 AB 3AC ja AB AC sekä vektoreiden AB ja
 100 l=0 AB 3AC ja AB AC sekä vektoreiden AB ja") MATEMATIIKAN PERUSKURSSI I Harjoitustehtäviä syksy 7. Millä reaaliluvun arvoilla a) 9 =, b) + 5 + +, e) 5?. Kirjoita Σ-merkkiä käyttäen summat 4, a) + + 5 + + 99, b) 5 + 4 65 + + n 5 n, c) +
MATEMATIIKAN PERUSKURSSI I Harjoitustehtäviä syksy 7. Millä reaaliluvun arvoilla a) 9 =, b) + 5 + +, e) 5?. Kirjoita Σ-merkkiä käyttäen summat 4, a) + + 5 + + 99, b) 5 + 4 65 + + n 5 n, c) +
Kinematiikka. Tommi Lintilä, Kari Tammi (Janne Ojalan kalvoista)
") 1 Kinematiikka Tommi Lintilä, Kari Tammi (Janne Ojalan kalvoista) 27.01.2016 Luennon sisältö Mekanismiopin ja kinematiikan käsitteitä Liikkuvuusaste ja vapausasteet Paikan määrittäminen Graafinen ratkaisu
1 Kinematiikka Tommi Lintilä, Kari Tammi (Janne Ojalan kalvoista) 27.01.2016 Luennon sisältö Mekanismiopin ja kinematiikan käsitteitä Liikkuvuusaste ja vapausasteet Paikan määrittäminen Graafinen ratkaisu
l 1 2l + 1, c) 100 l=0
 100 l=0") MATEMATIIKAN PERUSKURSSI I Harjoitustehtäviä syksy 5. Millä reaaliluvun arvoilla a) 9 =, b) 5 + 5 +, e) 5?. Kirjoita Σ-merkkiä käyttäen summat 4, a) + + 5 + + 99, b) 5 + 4 65 + + n 5 n, c)
MATEMATIIKAN PERUSKURSSI I Harjoitustehtäviä syksy 5. Millä reaaliluvun arvoilla a) 9 =, b) 5 + 5 +, e) 5?. Kirjoita Σ-merkkiä käyttäen summat 4, a) + + 5 + + 99, b) 5 + 4 65 + + n 5 n, c)
4. Käyrän lokaaleja ominaisuuksia
 23 VEKTORIANALYYSI Luento 3 4 Käyrän lokaaleja ominaisuuksia Käyrän tangentti Tarkastellaan parametrisoitua käyrää r( t ) Parametrilla t ei tarvitse olla mitään fysikaalista merkitystä, mutta seuraavassa
23 VEKTORIANALYYSI Luento 3 4 Käyrän lokaaleja ominaisuuksia Käyrän tangentti Tarkastellaan parametrisoitua käyrää r( t ) Parametrilla t ei tarvitse olla mitään fysikaalista merkitystä, mutta seuraavassa
a(t) = v (t) = 3 2 t a(t) = 3 2 t < t 1 2 < 69 t 1 2 < 46 t < 46 2 = 2116 a(t) = v (t) = 50
 = v (t) = 3 2 t a(t) = 3 2 t < t 1 2 < 69 t 1 2 < 46 t < 46 2 = 2116 a(t) = v (t) = 50") BM0A5810 - Differentiaalilaskenta ja sovellukset Harjoitus 1, Syksy 015 1. (a) Kiihtyvyys on nopeuden derivaatta, eli a(t) v (t) 3 t 1 + 1 Nyt on siis selvitettävä, milloin kiihtyvyys kasvaa itseisarvoltaan
BM0A5810 - Differentiaalilaskenta ja sovellukset Harjoitus 1, Syksy 015 1. (a) Kiihtyvyys on nopeuden derivaatta, eli a(t) v (t) 3 t 1 + 1 Nyt on siis selvitettävä, milloin kiihtyvyys kasvaa itseisarvoltaan
Muutoksen arviointi differentiaalin avulla
 Muutoksen arviointi differentiaalin avulla y y = f (x) y = f (x + x) f (x) dy y dy = f (x) x x x x x + x Luento 7 1 of 15 Matematiikan ja tilastotieteen laitos Turun yliopisto Muutoksen arviointi differentiaalin
Muutoksen arviointi differentiaalin avulla y y = f (x) y = f (x + x) f (x) dy y dy = f (x) x x x x x + x Luento 7 1 of 15 Matematiikan ja tilastotieteen laitos Turun yliopisto Muutoksen arviointi differentiaalin
KJR-C1001: Statiikka L2 Luento : voiman momentti ja voimasysteemit
 KJR-C1001: Statiikka L2 Luento 21.2.2018: voiman momentti ja voimasysteemit Apulaisprofessori Konetekniikan laitos Luennon osaamistavoitteet Tämän päiväisen luennon jälkeen opiskelija Pystyy muodostamaan,
KJR-C1001: Statiikka L2 Luento 21.2.2018: voiman momentti ja voimasysteemit Apulaisprofessori Konetekniikan laitos Luennon osaamistavoitteet Tämän päiväisen luennon jälkeen opiskelija Pystyy muodostamaan,
A B = (1, q, q 2 ) (2, 0, 2) = 2 2q q 2 = 0 q 2 = 1 q = ±1 A(±1) = (1, ±1, 1) A(1) A( 1) = (1, 1, 1) (1, 1, 1) = A( 1) A(1) A( 1) = 1
 (2, 0, 2) = 2 2q q 2 = 0 q 2 = 1 q = ±1 A(±1) = (1, ±1, 1) A(1) A( 1) = (1, 1, 1) (1, 1, 1) = A( 1) A(1) A( 1) = 1") Mapu I Viikko 4 tehtävä malli Millä q:n arvoilla vektori A(q) (, q, q ) on kohtisuora vektorin B (, 0, ) kanssa? Ovatko A:n eri ratkaisut keskenään kohtisuoria? Jos eivät, määrää niiden välinen kulma!
Mapu I Viikko 4 tehtävä malli Millä q:n arvoilla vektori A(q) (, q, q ) on kohtisuora vektorin B (, 0, ) kanssa? Ovatko A:n eri ratkaisut keskenään kohtisuoria? Jos eivät, määrää niiden välinen kulma!
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 3.3.2016 Susanna Hurme Päivän aihe: Ristikon sauvavoimat (Kirjan luvut 6.1-6.4) Osaamistavoitteet: Ymmärtää, mikä on ristikkorakenne Osata soveltaa aiemmin kurssilla
KJR-C1001 Statiikka ja dynamiikka Luento 3.3.2016 Susanna Hurme Päivän aihe: Ristikon sauvavoimat (Kirjan luvut 6.1-6.4) Osaamistavoitteet: Ymmärtää, mikä on ristikkorakenne Osata soveltaa aiemmin kurssilla
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 1.3.2016 Susanna Hurme Päivän aihe: Jäykän kappaleen tasapaino ja vapaakappalekuva (Kirjan luvut 5.1-5.4) Osaamistavoitteet: 1. Ymmärtää, mitä tukireaktiot ovat
KJR-C1001 Statiikka ja dynamiikka Luento 1.3.2016 Susanna Hurme Päivän aihe: Jäykän kappaleen tasapaino ja vapaakappalekuva (Kirjan luvut 5.1-5.4) Osaamistavoitteet: 1. Ymmärtää, mitä tukireaktiot ovat
JYVÄSKYLÄN YLIOPISTO. Integraalilaskenta 2 Harjoitus Olkoon A := {(x, y) R 2 0 x π, sin x y 2 sin x}. Laske käyräintegraali
 R 2 0 x π, sin x y 2 sin x}. Laske käyräintegraali") JYVÄSKYLÄN YLIOPISTO MTEMTIIKN J TILSTOTIETEEN LITOS Integraalilaskenta Harjoitus 4 5.4.4. Olkoon := {(x, y) R x π, sin x y sin x}. Laske käyräintegraali + (y dx + x dy) a) suoraan; ja b) Greenin lauseen
JYVÄSKYLÄN YLIOPISTO MTEMTIIKN J TILSTOTIETEEN LITOS Integraalilaskenta Harjoitus 4 5.4.4. Olkoon := {(x, y) R x π, sin x y sin x}. Laske käyräintegraali + (y dx + x dy) a) suoraan; ja b) Greenin lauseen
Suora. Määritelmä. Oletetaan, että n = 2 tai n = 3. Avaruuden R n suora on joukko. { p + t v t R},
 Määritelmä Suora Oletetaan, että n = 2 tai n = 3. Avaruuden R n suora on joukko { p + t v t R}, missä p, v R n ja v 0. Tässä p on suoran jonkin pisteen paikkavektori ja v on suoran suuntavektori. v p LM1,
Määritelmä Suora Oletetaan, että n = 2 tai n = 3. Avaruuden R n suora on joukko { p + t v t R}, missä p, v R n ja v 0. Tässä p on suoran jonkin pisteen paikkavektori ja v on suoran suuntavektori. v p LM1,
763306A JOHDATUS SUHTEELLISUUSTEORIAAN 2 Ratkaisut 2 Kevät 2017
 763306A JOHDATUS SUHTEELLISUUSTEORIAAN 2 Ratkaisut 2 Kevät 207. Nelinopeus ympyräliikkeessä On siis annettu kappaleen paikkaa kuvaava nelivektori X x µ : Nelinopeus U u µ on määritelty kaavalla x µ (ct,
763306A JOHDATUS SUHTEELLISUUSTEORIAAN 2 Ratkaisut 2 Kevät 207. Nelinopeus ympyräliikkeessä On siis annettu kappaleen paikkaa kuvaava nelivektori X x µ : Nelinopeus U u µ on määritelty kaavalla x µ (ct,
KJR-C1001 Statiikka ja dynamiikka
 KJR-C1001 Statiikka ja dynamiikka uento 16: Yleinen tasoliike kappaleen liikkeen mallinnus ja analysointi Jua Hartikainen Rakennustekniikan laitos Aalto-yliopiston insinööritieteiden korkeakoulu 16 Yleinen
KJR-C1001 Statiikka ja dynamiikka uento 16: Yleinen tasoliike kappaleen liikkeen mallinnus ja analysointi Jua Hartikainen Rakennustekniikan laitos Aalto-yliopiston insinööritieteiden korkeakoulu 16 Yleinen
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys102 Kevät 2010 Jukka Maalampi LUENTO 6 Yksinkertainen harmoninen liike yhteys ympyräliikkeeseen energia dynamiikka Värähdysliike Knight Ch 14 Heilahtelut pystysuunnassa ja gravitaation
Mekaniikan jatkokurssi Fys102 Kevät 2010 Jukka Maalampi LUENTO 6 Yksinkertainen harmoninen liike yhteys ympyräliikkeeseen energia dynamiikka Värähdysliike Knight Ch 14 Heilahtelut pystysuunnassa ja gravitaation
MS-A0207 Differentiaali- ja integraalilaskenta 2 (Chem) Tentti ja välikokeiden uusinta
 Tentti ja välikokeiden uusinta") MS-A0207 Differentiaali- ja integraalilaskenta 2 (Chem) Tentti ja välikokeiden uusinta 8..206 Gripenberg, Nieminen, Ojanen, Tiilikainen, Weckman Kirjoita jokaiseen koepaperiin nimesi, opiskelijanumerosi
MS-A0207 Differentiaali- ja integraalilaskenta 2 (Chem) Tentti ja välikokeiden uusinta 8..206 Gripenberg, Nieminen, Ojanen, Tiilikainen, Weckman Kirjoita jokaiseen koepaperiin nimesi, opiskelijanumerosi
Luento 10: Työ, energia ja teho. Johdanto Työ ja kineettinen energia Teho
 Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho 1 / 23 Luennon sisältö Johdanto Työ ja kineettinen energia Teho 2 / 23 Johdanto Energia suure, joka voidaan muuttaa muodosta toiseen,
Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho 1 / 23 Luennon sisältö Johdanto Työ ja kineettinen energia Teho 2 / 23 Johdanto Energia suure, joka voidaan muuttaa muodosta toiseen,
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 8.3.2016 Susanna Hurme Päivän aihe: Normaalivoiman, leikkausvoiman ja taivutusmomentin käsitteet (Kirjan luku 7.1) Osaamistavoitteet: Ymmärtää, millaisia sisäisiä
KJR-C1001 Statiikka ja dynamiikka Luento 8.3.2016 Susanna Hurme Päivän aihe: Normaalivoiman, leikkausvoiman ja taivutusmomentin käsitteet (Kirjan luku 7.1) Osaamistavoitteet: Ymmärtää, millaisia sisäisiä
Suhteellinen nopeus. Matkustaja P kävelee nopeudella 1.0 m/s pitkin 3.0 m/s nopeudella etenevän junan B käytävää
 3.5 Suhteellinen nopeus Matkustaja P kävelee nopeudella 1.0 m/s pitkin 3.0 m/s nopeudella etenevän junan B käytävää P:n nopeus junassa istuvan toisen matkustajan suhteen on v P/B-x = 1.0 m/s Intuitio :
3.5 Suhteellinen nopeus Matkustaja P kävelee nopeudella 1.0 m/s pitkin 3.0 m/s nopeudella etenevän junan B käytävää P:n nopeus junassa istuvan toisen matkustajan suhteen on v P/B-x = 1.0 m/s Intuitio :
Havainnollistuksia: Merkitään w = ( 4, 3) ja v = ( 3, 2). Tällöin. w w = ( 4) 2 + ( 3) 2 = 25 = 5. v = ( 3) = 13. v = v.
 ja v = ( 3, 2). Tällöin. w w = ( 4) 2 + ( 3) 2 = 25 = 5. v = ( 3) = 13. v = v.") Havainnollistuksia: Merkitään w = ( 4, 3) ja v = ( 3, 2). Tällöin w = w w = ( 4) 2 + ( 3) 2 = 25 = 5 v = v v = ( 3) 2 + 2 2 = 13. w =5 3 2 v = 13 4 3 LM1, Kesä 2014 76/102 Normin ominaisuuksia I Lause
Havainnollistuksia: Merkitään w = ( 4, 3) ja v = ( 3, 2). Tällöin w = w w = ( 4) 2 + ( 3) 2 = 25 = 5 v = v v = ( 3) 2 + 2 2 = 13. w =5 3 2 v = 13 4 3 LM1, Kesä 2014 76/102 Normin ominaisuuksia I Lause
Kuva 1: Tehtävä 1a. = 2π. 3 x3 1 )
") BMA58 - Integraalilaskenta ja sovellukset Harjoitus 3, Kevät 6 = Kuva : Tehtävä a. a Slinterinkuorelle tässä h = ja r = ja kä läpi välin [,], joka johtaa lausekkeeseen: V = π 6 / 3 d 3 3 3 = 3 Kuva : Tehtävä
BMA58 - Integraalilaskenta ja sovellukset Harjoitus 3, Kevät 6 = Kuva : Tehtävä a. a Slinterinkuorelle tässä h = ja r = ja kä läpi välin [,], joka johtaa lausekkeeseen: V = π 6 / 3 d 3 3 3 = 3 Kuva : Tehtävä
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 9: Greenin lause
 MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 9: Greenin lause Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2015 1 / 19 Esimerkki Olkoon F : R 3 R 3 vakiofunktio
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 9: Greenin lause Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2015 1 / 19 Esimerkki Olkoon F : R 3 R 3 vakiofunktio
Luento 9: Pyörimisliikkeen dynamiikkaa
 Luento 9: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Harjoituksia ja laskettuja esimerkkejä ELEC-A3110 Mekaniikka (5 op) Sami
Luento 9: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Harjoituksia ja laskettuja esimerkkejä ELEC-A3110 Mekaniikka (5 op) Sami
9. Vektorit. 9.1 Skalaarit ja vektorit. 9.2 Vektorit tasossa
 9. Vektorit 9.1 Skalaarit ja vektorit Skalaari on koon tai määrän mitta. Tyypillinen esimerkki skalaarista on massa. Lukumäärä on toinen hyvä esimerkki skalaarista. Vektorilla on taas suuruus ja suunta.
9. Vektorit 9.1 Skalaarit ja vektorit Skalaari on koon tai määrän mitta. Tyypillinen esimerkki skalaarista on massa. Lukumäärä on toinen hyvä esimerkki skalaarista. Vektorilla on taas suuruus ja suunta.
Ristitulolle saadaan toinen muistisääntö determinantin avulla. Vektoreiden v ja w ristitulo saadaan laskemalla determinantti
 14 Ristitulo Avaruuden R 3 vektoreille voidaan määritellä pistetulon lisäksi niin kutsuttu ristitulo. Pistetulosta poiketen ristitulon tulos ei ole reaaliluku vaan avaruuden R 3 vektori. Ristitulosta on
14 Ristitulo Avaruuden R 3 vektoreille voidaan määritellä pistetulon lisäksi niin kutsuttu ristitulo. Pistetulosta poiketen ristitulon tulos ei ole reaaliluku vaan avaruuden R 3 vektori. Ristitulosta on
5.9 Voiman momentti (moment of force, torque)
") 5.9 Voiman momentti (moment of force, torque) Voiman momentti määritellään ristitulona M = r F missä r on voiman F vaikutuspisteen paikkavektori tarkasteltavan pisteen suhteen Usean voiman tapauksessa
5.9 Voiman momentti (moment of force, torque) Voiman momentti määritellään ristitulona M = r F missä r on voiman F vaikutuspisteen paikkavektori tarkasteltavan pisteen suhteen Usean voiman tapauksessa
VEKTORIT paikkavektori OA
 paikkavektori OA Piste A = (2, -1) Paikkavektori OA = 2i j 3D: kuvan piirtäminen hankalaa Piste A = (2, -3, 4) Paikkavektori OA = 2i 3j + 4k Piste A = (a 1, a 2, a 3 ) Paikkavektori OA = a 1 i + a 2 j
paikkavektori OA Piste A = (2, -1) Paikkavektori OA = 2i j 3D: kuvan piirtäminen hankalaa Piste A = (2, -3, 4) Paikkavektori OA = 2i 3j + 4k Piste A = (a 1, a 2, a 3 ) Paikkavektori OA = a 1 i + a 2 j
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 10: Moninkertaisten integraalien sovelluksia
 Luento 10: Moninkertaisten integraalien sovelluksia") MS-A22 ifferentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Moninkertaisten integraalien sovelluksia Antti Rasila Aalto-yliopisto Syksy 215 Antti Rasila (Aalto-yliopisto) MS-A22 Syksy 215 1 / 2 Moninkertaisten
MS-A22 ifferentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Moninkertaisten integraalien sovelluksia Antti Rasila Aalto-yliopisto Syksy 215 Antti Rasila (Aalto-yliopisto) MS-A22 Syksy 215 1 / 2 Moninkertaisten
Insinöörimatematiikka D
 Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 4: Taso- ja avaruuskäyrät
 MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 4: Taso- ja avaruuskäyrät Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2015 1 / 24 Motivaatio Tässä tutustutaan
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 4: Taso- ja avaruuskäyrät Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2015 1 / 24 Motivaatio Tässä tutustutaan
Pakotettu vaimennettu harmoninen värähtelijä Resonanssi
 Pakotettu vaimennettu harmoninen värähtelijä Resonanssi Tällä luennolla tavoitteena Mikä on pakkovoiman aiheuttama vaikutus vaimennettuun harmoniseen värähtelijään? Mikä on resonanssi? Kertaus: energian
Pakotettu vaimennettu harmoninen värähtelijä Resonanssi Tällä luennolla tavoitteena Mikä on pakkovoiman aiheuttama vaikutus vaimennettuun harmoniseen värähtelijään? Mikä on resonanssi? Kertaus: energian
Kertausosa. 5. Merkitään sädettä kirjaimella r. Kaaren pituus on tällöin r a) sin = 0, , c) tan = 0,
 sin = 0, , c) tan = 0,") Kertausosa. a),6 60 576 Peruuttaessa pyörähdyssuunta on vastapäivään. Kulma on siis,4 60 864 a) 576 864 0,88m. a) α b 0,6769... 0,68 (rad) r,m 8cm β,90...,9 (rad) 4cm a) α 0,68 (rad) β,9 (rad). a) 5,0
Kertausosa. a),6 60 576 Peruuttaessa pyörähdyssuunta on vastapäivään. Kulma on siis,4 60 864 a) 576 864 0,88m. a) α b 0,6769... 0,68 (rad) r,m 8cm β,90...,9 (rad) 4cm a) α 0,68 (rad) β,9 (rad). a) 5,0
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 10: Moninkertaisten integraalien sovelluksia
 Luento 10: Moninkertaisten integraalien sovelluksia") MS-A22 ifferentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Moninkertaisten integraalien sovelluksia Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 217 Antti Rasila (Aalto-yliopisto)
MS-A22 ifferentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Moninkertaisten integraalien sovelluksia Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 217 Antti Rasila (Aalto-yliopisto)
(a) Potentiaali ja virtafunktiot saadaan suoraan summaamalla lähteen ja pyörteen funktiot. Potentiaalifunktioksi
 Potentiaali ja virtafunktiot saadaan suoraan summaamalla lähteen ja pyörteen funktiot. Potentiaalifunktioksi") Tehtävä 1 Tornadon virtauskenttää voidaan approksimoida kaksiulotteisen nielun ja pyörteen summana Oleta, että nielun voimakkuus on m < ja pyörteen voimakkuus on > (a Määritä tornadon potentiaali- ja virtafunktiot
Tehtävä 1 Tornadon virtauskenttää voidaan approksimoida kaksiulotteisen nielun ja pyörteen summana Oleta, että nielun voimakkuus on m < ja pyörteen voimakkuus on > (a Määritä tornadon potentiaali- ja virtafunktiot
Luvun 5 laskuesimerkit
 Luvun 5 laskuesimerkit Esimerkki 5.1 Moottori roikkuu oheisen kuvan mukaisessa ripustuksessa. a) Mitkä ovat kahleiden jännitykset? b) Mikä kahleista uhkaa katketa ensimmäisenä? Piirretäänpä parit vapaakappalekuvat.
Luvun 5 laskuesimerkit Esimerkki 5.1 Moottori roikkuu oheisen kuvan mukaisessa ripustuksessa. a) Mitkä ovat kahleiden jännitykset? b) Mikä kahleista uhkaa katketa ensimmäisenä? Piirretäänpä parit vapaakappalekuvat.
Mekaniikka, osa 2. Perttu Lantto. Luentokalvot
 Mekaniikka, osa 2 Perttu Lantto Luentokalvot perustuvat kirjaan: University physics, 13 th International Edition H. D. Young & R. A. Freedman (Pearson, 2012) 16. tammikuuta 2017 Mekaniikka, osa 2 Mekaniikka
Mekaniikka, osa 2 Perttu Lantto Luentokalvot perustuvat kirjaan: University physics, 13 th International Edition H. D. Young & R. A. Freedman (Pearson, 2012) 16. tammikuuta 2017 Mekaniikka, osa 2 Mekaniikka
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 8: Divergenssi ja roottori. Gaussin divergenssilause.
 MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 8: Divergenssi ja roottori. Gaussin divergenssilause. Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2015
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 8: Divergenssi ja roottori. Gaussin divergenssilause. Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2015
MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 10: Napa-, sylinteri- ja pallokoordinaatistot. Pintaintegraali.
 MS-A25/MS-A26 Differentiaali- ja integraalilaskenta 2 Luento 1: Napa-, sylinteri- ja pallokoordinaatistot. Pintaintegraali. Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät
MS-A25/MS-A26 Differentiaali- ja integraalilaskenta 2 Luento 1: Napa-, sylinteri- ja pallokoordinaatistot. Pintaintegraali. Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät
läheisyydessä. Piirrä funktio f ja nämä approksimaatiot samaan kuvaan. Näyttääkö järkeenkäyvältä?
 BM20A5840 - Usean muuttujan funktiot ja sarjat Harjoitus 1, Kevät 2017 1. Tunnemme vektorit a = [ 1 2 3 ] ja b = [ 2 1 2 ]. Laske (i) kummankin vektorin pituus (eli itseisarvo, eli normi); (ii) vektorien
BM20A5840 - Usean muuttujan funktiot ja sarjat Harjoitus 1, Kevät 2017 1. Tunnemme vektorit a = [ 1 2 3 ] ja b = [ 2 1 2 ]. Laske (i) kummankin vektorin pituus (eli itseisarvo, eli normi); (ii) vektorien
Luento 13: Periodinen liike. Johdanto Harmoninen värähtely Esimerkkejä F t F r
 Luento 13: Periodinen liike Johdanto Harmoninen värähtely Esimerkkejä θ F t m g F r 1 / 27 Luennon sisältö Johdanto Harmoninen värähtely Esimerkkejä 2 / 27 Johdanto Tarkastellaan jaksollista liikettä (periodic
Luento 13: Periodinen liike Johdanto Harmoninen värähtely Esimerkkejä θ F t m g F r 1 / 27 Luennon sisältö Johdanto Harmoninen värähtely Esimerkkejä 2 / 27 Johdanto Tarkastellaan jaksollista liikettä (periodic
Vektoreiden A = (A1, A 2, A 3 ) ja B = (B1, B 2, B 3 ) pistetulo on. Edellisestä seuraa
 ja B = (B1, B 2, B 3 ) pistetulo on. Edellisestä seuraa") Viikon aiheet Pistetulo (skalaaritulo Vektorien tulot Pistetulo Ristitulo Skalaari- ja vektorikolmitulo Integraalifunktio, alkeisfunktioiden integrointi, yhdistetyn funktion derivaatan integrointi Vektoreiden
Viikon aiheet Pistetulo (skalaaritulo Vektorien tulot Pistetulo Ristitulo Skalaari- ja vektorikolmitulo Integraalifunktio, alkeisfunktioiden integrointi, yhdistetyn funktion derivaatan integrointi Vektoreiden
ELEC C4140 Kenttäteoria (syksy 2016)
") ELEC C4140 Kenttäteoria (syksy 2016) Henrik Wallén / versio 15. syyskuuta 2016 Vektorianalyysi (Ulaby, luku 3) Viiva-, pinta- ja tilavuusalkiot Nablaoperaatiot Gaussin ja Stokesin lauseet Nabla on ystävä
ELEC C4140 Kenttäteoria (syksy 2016) Henrik Wallén / versio 15. syyskuuta 2016 Vektorianalyysi (Ulaby, luku 3) Viiva-, pinta- ja tilavuusalkiot Nablaoperaatiot Gaussin ja Stokesin lauseet Nabla on ystävä
Differentiaalilaskenta 1.
 Differentiaalilaskenta. a) Mikä on tangentti? Mikä on sekantti? b) Määrittele funktion monotonisuuteen liittyvät käsitteet: kasvava, aidosti kasvava, vähenevä ja aidosti vähenevä. Anna esimerkit. c) Selitä,
Differentiaalilaskenta. a) Mikä on tangentti? Mikä on sekantti? b) Määrittele funktion monotonisuuteen liittyvät käsitteet: kasvava, aidosti kasvava, vähenevä ja aidosti vähenevä. Anna esimerkit. c) Selitä,
DYNAMIIKKA II, LUENTO 6 (SYKSY 2015) Arttu Polojärvi
 Arttu Polojärvi") DYNAMIIKKA II, LUENTO 6 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Mekaniikan peruslait (liikelait). Liikemäärän momentin tase. Kappaleen massan vaikutusmitat. Jäykän
DYNAMIIKKA II, LUENTO 6 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Mekaniikan peruslait (liikelait). Liikemäärän momentin tase. Kappaleen massan vaikutusmitat. Jäykän
Insinöörimatematiikka D
 Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
Differentiaali- ja integraalilaskenta 3 Mallit 2 (alkuviikko) / Syksy 2016
 / Syksy 2016") MS-A35 Differentiaali- ja integraalilaskenta 3 Differentiaali- ja integraalilaskenta 3 Mallit 2 (alkuviikko) / Syksy 216 Tuntitehtävä 1: Laske sylinterikoordinaatteja käyttämällä sen kappaleen tilavuus,
MS-A35 Differentiaali- ja integraalilaskenta 3 Differentiaali- ja integraalilaskenta 3 Mallit 2 (alkuviikko) / Syksy 216 Tuntitehtävä 1: Laske sylinterikoordinaatteja käyttämällä sen kappaleen tilavuus,
Vektoriarvoiset funktiot Vektoriarvoisen funktion jatkuvuus ja derivoituvuus
 8. Vektoriarvoiset funktiot 8.1. Vektoriarvoisen funktion jatkuvuus ja derivoituvuus 320. Olkoon u reaalimuuttujan vektoriarvoinen funktio R R n ja lim t a u(t) = b. Todista: lim t a u(t) = b. 321. Olkoon
8. Vektoriarvoiset funktiot 8.1. Vektoriarvoisen funktion jatkuvuus ja derivoituvuus 320. Olkoon u reaalimuuttujan vektoriarvoinen funktio R R n ja lim t a u(t) = b. Todista: lim t a u(t) = b. 321. Olkoon
Differentiaalimuodot
 LUKU 2 Differentiaalimuodot Olkoot A R n ja p A. Vektori pisteessä p on pari (p; v), missä v R n. Pisteeseen p kiinnitetyn vektorin v p := (p; v) ensimmäinen komponentti p on vektorin v p paikkaosa ja
LUKU 2 Differentiaalimuodot Olkoot A R n ja p A. Vektori pisteessä p on pari (p; v), missä v R n. Pisteeseen p kiinnitetyn vektorin v p := (p; v) ensimmäinen komponentti p on vektorin v p paikkaosa ja
Luvun 8 laskuesimerkit
 Luvun 8 laskuesimerkit Esimerkki 8.1 Heität pallon, jonka massa on 0.40 kg seinään. Pallo osuu seinään horisontaalisella nopeudella 30 m/s ja kimpoaa takaisin niin ikään horisontaalisesti nopeudella 20
Luvun 8 laskuesimerkit Esimerkki 8.1 Heität pallon, jonka massa on 0.40 kg seinään. Pallo osuu seinään horisontaalisella nopeudella 30 m/s ja kimpoaa takaisin niin ikään horisontaalisesti nopeudella 20
3x + y + 2z = 5 e) 2x + 3y 2z = 3 x 2y + 4z = 1. x + y 2z + u + 3v = 1 b) 2x y + 2z + 2u + 6v = 2 3x + 2y 4z 3u 9v = 3. { 2x y = k 4x + 2y = h
 2x + 3y 2z = 3 x 2y + 4z = 1. x + y 2z + u + 3v = 1 b) 2x y + 2z + 2u + 6v = 2 3x + 2y 4z 3u 9v = 3. { 2x y = k 4x + 2y = h") HARJOITUSTEHTÄVIÄ 1. Anna seuraavien yhtälöryhmien kerroinmatriisit ja täydennetyt kerroinmatriisit sekä ratkaise yhtälöryhmät Gaussin eliminointimenetelmällä. { 2x + y = 11 2x y = 5 2x y + z = 2 a) b)
HARJOITUSTEHTÄVIÄ 1. Anna seuraavien yhtälöryhmien kerroinmatriisit ja täydennetyt kerroinmatriisit sekä ratkaise yhtälöryhmät Gaussin eliminointimenetelmällä. { 2x + y = 11 2x y = 5 2x y + z = 2 a) b)