Mekaniikka, osa 2. Perttu Lantto. Luentokalvot
|
|
|
- Minna Korpela
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
1 Mekaniikka, osa 2 Perttu Lantto Luentokalvot perustuvat kirjaan: University physics, 13 th International Edition H. D. Young & R. A. Freedman (Pearson, 2012) 16. tammikuuta 2017
2 Mekaniikka, osa 2 Mekaniikka -kurssin 2. osa käsittelee seuraavia asioita (numerointi kirjan lukujen mukaan): 9 Jäykän kappaleen pyöriminen (Rotation of Rigid Bodies) 10 Pyörimisliikkeen dynamiikka (Dynamics of Rotational Motion) 11 Tasapaino ja elastisuus (Equilibrium and Elasticity) 12 Gravitaatio (Graviation) 13 Jaksollinen liike (Periodic motion) 14 Nesteiden mekaniikka (Fluid mechanics)
3 Osa I Luku 9: Jäykän kappaleen pyöriminen
4 Jäykän kappaleen pyöriminen Luku 9 käsittelee pyörimistä jäykkille kappaleille, joiden muoto ei muutu. 9.1 Kulmanopeus ja -kiihtyvyys -kappaleessa objektin pyörimistä kuvataan kulmakoordinaatin avulla ja määritellään liikesuureet kulmanopeus ja kulmakiihtyvyys. -kappaleessa esitellään objektin pyörimisen liikeyhtälöt, kun pyöriminen kiihtyy tasaisesti. -kappale esittelee objektin suoraviivaiseen ja pyörimisliikkeeseen liittyvien vauhtien ja kiihtyvyyksien suhteen. -kappaleessa esitellään objektin kulmanopeuden ja kineettisen energian välinen yhteys uuden suuruen, objektin hitausmomentin, avulla. 9.5 Yhdensuuntaisten akselien teoreema (Steinerin sääntö) -kappaleessa esitetään hitausmomentti mielivaltaisen pyörimisakselin suhteen, joka on samansuuntainen massakeskipisteen kautta kulkevan pyörimisakselin kanssa. 9.6 Hitausmomenttilaskut -kappale antaa yleiset integraaliyhtälöt hitausmomentin laskemiseksi mielivaltaisen muotoiselle kappaleelle.

5 Useissa käytännön ilmiöissä (tuulivoimala, CD-levy, jne.) esiintyy pyörimistä, jota ei voida, tai se on ainakin hyvin monimutkasita, esittää liikkuvalla pisteellä karteesisessa koordinaatistossa. Siksi on järkevää tarkastella kappaleen pyörimistä jonkin akselin suhteen, joka kulkee kappaleen mukana eli on levossa inertiaalikoordinaatistossa. Pyörimistä, rotaatiota, esiintyy atomien rakenneosasista (elektronit ja muut perushiukkaset) aina galaksien mittakaavaan, joten sen käsittelyyn tarvitaan yleiset työkalut. Helpointa on aloittaa pysyvän kokoisten ja muotoisten kappaleiden käsittelystä, jotka voivat olla sekä rotaatio- että translaatioliikkeessä. Tällaisessa liikkeessä todelliset kappaleet kokevat voimia, jotka muokkaavat niiden muotoa. Ensimmäinen approksimaatio on kuitenkin unohtaa muodonmuutokset ja tarkastella ideaalista jäykkää kappaletta (rigid body), joka säilyttää muotonsa ja kokonsa. Tuulivoimalan siiven kaikki osat liikkuvat samalla kulmanopeudella. Mikä on siiven eri osien lineaaristen vauhtien ja radiaalisten kiihtyvyyksien erot?
6 Jäykän kappaleen (moottorin akseli, karuselli, jne.) pyörimistä on järkevää tarkastella inertiaalikoordinaatistossa, jonka suhteen kiinnitetty pyörimisakseli on levossa. Kuvan 9.1 mukaisesti pyörimisakseli voidaan asettaa referenssikoordinaatiston origoon ja se on kohtisuorassa pyorimistasoon nähden, joka voidaan valita esim xy-tasoksi. Ei ole järkevää tarkastella tietyn pisteen P x ja y koordinaattien arvoja vaan sen sijaan OP -janan rotaatiota kappaleen mukana. Tällöin tarvitaan vain yksi suure, pyörimiskoordinaatti, joka on OP -janan ja +x-akselin välinen kulma θ. Kuten suoraviivaisellekin liikkeelle, on kulmakoordinaatille θ tärkeää määritellä positiivinen ja negatiivinen suunta joko vasta- tai myötäpäivään. 9.1 Mittarin neula pyörii origon kautta kulkevan pyörimisakselin suhteen vastapäivään.
7 Kulmanopeus Asteen ( ) sijasta rotaatiokulman θ luonnollisin yksikkö on radiaani (rad), joka on yksi (1 rad) kun kulma θ piirtää ympyrän säteen (r) pituisen ympyräkaaren s eli s = r (Kuva 9.2a). Kulman arvo radiaaneina on siis (Kuva 9.2b): θ = s r eli s = rθ (9.1) Radiaani on siis puhdas, dimensioton, luku ja rad-merkintää käytetään vain erottamaan se muista yksiköistä (, jne.) Yhdessä kierroksessa (360 ) ympyrän ympäri on siis 2π radiaania, joten 1 rad = 360 2π = 57.6, 180 = π rad, 90 = π 2 rad, jne. 9.2 Kulman mitta radiaaneina.

8 Kulmanopeus Koska θ antaa jäykän kappaleen orientaation tiettynä ajanhetkenä, kappaleen rotaatioliikettä voidaan kuvata θ:n muutosnopeudella. Kuvassa 9.3a kahdella eri ajanhetkellä t 1 ja t 2 havaittujen kulmien θ 1 ja θ 2 avulla voidaan määritellä keskimääräinen kulmanopeus ω av z kulman muutoksen θ = θ 2 θ 1 suuruutena aikavälillä t = t 2 t 1 Hetkellinen kulmanopeus ω z (angular velocity) saadaan, kun aikaväli t lähestyy nollaa eli derivaattana ajan t suhteen θ ω z = lim t 0 t = dθ dt (kulmanopeus) (9.3) ω av z = θ 2 θ 1 t 2 t 1 = θ t (9.2) missä z alaindeksi merkitsee, että pyöriminen tapahtuu xy tasoa vastaa kohtisuoran z akselin suhteen (Huom! Ei siis ole z suuntaista liikettä, kuten v z!). 9.3 (a) Pyörivän kappaleen kulman muutos (b) Jäykän kappaleen kaikki osat pyörivät samalla keskimääräisellä kulmanopeudella θ/ t.
 on kulmanopeuden magnitudi ω ja kuten lineaarinenkin vauhti, se ei voi olla negatiivinen.")
9 Kulmanopeus Kuvan 9.4 mukaisesti kulmanopeus ω z voi olla positiivinen ω z > 0, kun θ kasvaa (vastapäivään) tai negatiivinen ω z < 0, kun θ pienenee (myötäpäivään eli muuttuu negatiiviseen suuntaan). Kulmavauhti (angular speed) on kulmanopeuden magnitudi ω ja kuten lineaarinenkin vauhti, se ei voi olla negatiivinen. Kappaleen eri osat kulkevat eri suuruisen matkan samassa ajassa riippuen niiden etäisyydestä pyörimisakselilta. Jäykän kappaleen jokainen osa kuitenkin pyörii samalla kulmanopeudella pyörimisakselin suhteen eli saman kulman tietyssä ajassa. 9.4 Jäykän kappaleen keskimääräinen (tässä) ja hetkellinen kulmanopeus voivat saada negatiivisia ja positiivisia arvoja.
10 Kulmanopeus Kun kulma mitataan radiaaneissa, kulmanopeuden yksiköksi tulee rad/s, joka on noin 10 kierrosta minuutissa (rpm, revolutions per minute, rev/min). Kuten z akselin suuntainen kulmanopeus ω z antaa ymmärtää, kulmanopeus on yleisesti vektorisuure, kulmanopeusvektori ω. Suuruuden lisäksi se sisältää tiedon pyörimissuunnasta oikean käden säännön (right-hand rule) mukaisesti (kuvan 9.5a). 9.5 (a) Kulmanopeusvektorin ω suunnan oikean käden sääntö. (b) ω z etumerkki xy tason rotaatiossa.
11 Kulmanopeus Esimerkki 9.1: Halkaisijaltaan d = 0.36 m vauhtipyörän kulma riippuu ajasta yhtälön θ = (2.0 rad/s 3 )t 3 mukaisesti. (a) Kulma θ ilmoitettuna radiaaneina ja kulmina on ajanhetkellä t 1 = 2.0 s : θ 1 = (2.0 rad/s 3 )(2.0 s) 3 = 16 rad = π = 920 ja ajanhetkellä t 2 = 5.0 s : θ 2 = (2.0 rad/s 3 )(5.0 s) 3 = 250 rad = π = (b) Vauhtipyörän reunalla olevan hiukkasen tekemä matka aikavälillä t = t 2 t 1 = 3.0 s saadaan sen aikana tapahtuneesta kulman muutoksesta θ = θ 2 θ 1 = (250 16) rad = 234 rad s = rθ 2 rθ 1 = r θ = d θ = (0.18 m)(234 rad) = 42 m 2 (c) Keskimääräiseksi kulmanopeudeksi saadaan yhtälön (9.2) mukaisesti: ω av z = θ 234 rad = = 78 rad/s = t 3.0 s ( 78 rad s ) ( 60 s 2π rad ) = kierrosta min 740 rpm (d) Yhtälön (9.3) mukaan kulmanopeus saadaan derivoimalla kulman yhtälöä ω z = dθ dt = d { dt (2.0 rad/s 3 )t 3} = (2.0 rad/s 3 ) ( 3t 2) = (6.0 rad/s 3 )t 2, joka antaa ajanhetkellä t 1 = 2.0 s : ω 1z = (6.0 rad/s 3 )(2.0 s) 2 = 24 rad/s ja ajanhetkellä t 2 = 5.0 s : ω 2z = (6.0 rad/s 3 )(5.0 s) 2 = 150 rad/s Kulmanopeus siis kasvaa ajan kuluessa neliöllisesti ( t 2 ).
12 Kulmakiihtyvyys Jäykän kappaleen pyörimisnopeuden muuttuessa sillä on kulmakiihtyvyys (esim. pyörän kiihdytys ja jarrutus). Kun ω 1z ja ω 2z ovat kulmanopeudet ajanhetkillä t 1 ja t 2, keskimääräinen kulmakiihtyvyys (yksikkö rad/s 2 ) määritellään kulmanopeuden muutoksena kyseisellä aikavälillä (Kuva 9.6) α av z = ω 2z ω 1z t 2 t 1 = ωz t (9.4) Koska ω z = dθ/dt, voidaan kulmakiihtyvyys esittää myös kulmakoordinaatin toisena aikaderivaattana α z = dωz dt = d dθ dt dt = d2 θ dt 2 (9.6) eli kuten lineaariselle liikkeelle, pyörimisellekin nopeus on paikan ja kiihtyvyys nopeuden muutosvauhti eli aikaderivaatta. Hetkellisen kulmakiihtyvyyden α z (angular acceleration), määritelmä saadaan raja-arvona, kun t 0 ω z α z = lim = dωz (9.5) t 0 t dt 9.6 Jäykän kappaleen keskimääräisen kulmakiihtyvyyden laskeminen.
13 Kulmakiihtyvyys Jos rotaatiossa kulmakiihtyvyys on positiivinen (α z > 0), kulmanopeus ω z kasvaa. Vastaavasti ω z pienenee (muuttuu negatiiviseen suuntaan), kun kulmakiihtyvyys on negatiivinen (α z < 0). Kuten lineaarisellekin liikkeelle, pyörimisvauhti kasvaa, jos α z ja ω z ovat samanmerkkisiä ja vastaavasti pienenee, jos ne ovat erimerkkisiä. Kuten kulmanopeudellekin ( ω) yleisessä tapauksessa kannattaa käsitellä kulmakiihtyvyysvektoria, joka on kulmanopeusvektorin aikaderivaatta α = d ω dt Jos objektin pyörimisakseli pysyy z suunnassa, α:lla kuten ω:llakin on vain z komponentti eli α z ja ω z. Tällöin rotaatiovauhti kasvaa, kun α on samansuuntainen ω:n kanssa ja pienenee, kun suunnat ovat vastakkaiset (kuva 9.7). 9.7 Kun pyörimisakseli on kiinnitetty, sekä kulmanopeus että -kiihtyvyys ovat yhdensuuntaisia akselin kanssa.
14 Kulmakiihtyvyys Esimerkki 9.2: Halkaisijaltaan d = 0.36 m vauhtipyörän kulma riippuu ajasta: θ = (2.0 rad/s 3 )t 3 (kts. esimerkki 9.1). (a) Laskemalla esimerkissä 1 laskettujen kulmanopeuksien ero ω z = ω 2z ω 1z = (150 24) rad/s = 126 rad/s ajanhetkillä t 1 = 2.0 s ja t 2 = 5.0 s, saadaan keskimääräiseksi kulmakiihtyvyydeksi tällä aikavälillä ( t = t 2 t 1 = 3.0 s) yhtälön (9.4) mukaan: α av z = ωz 126 rad/s = = 42 rad/s t 3.0 s 2 (b) Yhtälön (9.5) mukaisesti (hetkellinen) kulmakiihtyvyys saadaan derivoimalla kulmanopeuden yhtälöä kerran ajan suhteen α z = dω dt = d { dt (6.0 rad/s 3 )t 2} = (6.0 rad/s 3 ) (2t) = (12.0 rad/s 3 )t, joka antaa ajanhetkillä t 1 = 2.0 s : α 1z = (12.0 rad/s 3 )(2.0 s) = 24 rad/s 2 t 2 = 5.0 s : α 2z = (12.0 rad/s 3 )(5.0 s) = 60 rad/s 2 Kulmakiihtyvyys ei siis ole vakio vaan riippuu ajasta α z(t). Kulmanopeus ω z kasvaa jatkuvasti, sillä α z on aina positiivinen. Lisäksi kulmanopeuden kasvu kiihtyy, koska kulmakiihtyvyys kasvaa koko ajan.
15 Kuten lineaarinen liike niin myös rotaatio kiinnitetyn akselin suhteen yksinkertaistuu, kun kiihtyvyys on vakio. Tällöin saadaan kirjoitettua yhtälöt sekä kulmanopeudelle että kulman arvolle, jotka vastaavat muodoltaa lineaarisen liikkeen vastaavia muuttujien vaihdolla: x θ, v x ω z ja a x α z. Aloitetaan merkitsemällä ω 0z kulmanopeudeksi ajanhetkellä t = 0 ja ω z on kulmanopeus millä tahansa myöhemmällä ajanhetkellä t. Koska nyt α z on vakio eli sama kaikilla aikaväleillä saadaan: α z = ωz ω 0z t 0 ω z = ω 0z + α zt (9.7) eli koska α zt on kulmanopeuden kokonaismuutos tällä aikavälillä saadaan kulmanopeudeksi lopussa (ω z(t) = ω z) lisäämällä alkukulmanopeus ω 0z. Koska vakiokulmakiihtyvyydellä kulmanopeus muuttuu tasaisesti, sen keskiarvo välillä 0 t saadaan keskiarvona lähtö- ja loppukulmanopeudesta: ω av z = ω 0z + ω z 2 (9.8)
16 Keskimääräinen kulmanopeus ω av z saadaan myös kulman muutoksesta tällä aikavälillä: ω av z = θ θ 0 t 0 (9.9) Yhtälöt (9.8) ja (9.9) yhdistämällä voidaan kirjoittaa kulman muutos ajassa: θ θ 0 = 1 2 (ω 0z + ω z) t (9.10) Jotta kulman arvo saadaan ilmaistua vain alkukulman (θ 0 ), alkukulmanopeuden (ω 0z ) sekä vakiokulmakiihtyvyyden (α z) avulla, korvataan ω z kaavalla (9.7): θ θ 0 = 1 2 [ω 0z + (ω 0z + α zt)] t θ = θ 0 + ω 0z t αzt2 (9.10) Ainoastaan kolmas termi ( 1 2 αzt2 ) ottaa huomioon muuttuvan kulmanopeuden, mikä on tärkeää lisätä alkuperäiseen kulmaan (θ 0 ) ja vakio(alku)kulmanopeuden termiin aikaintervallin yli (ω 0z t), jotta lopullinen kulma θ tulee oikein.
17 Kuten lineaariselle liikkeelle, myös rotaatiolle aika (t) voidaan eliminoida tasaisesti kiihtyvän liikkeen yhtälöistä (kotitehtävä 9.12), jolloin lopullisen kulman (θ) ja kulmanopeuden (ω z) välille saadaan yhteys: ω 2 z = ω 2 0z + 2α z (θ θ 0 ) (9.11) Huom! Edellä esitetyt rotaatiota kuvaavat yhtälöt kuten myös lineaarisen liikkeen vastaavat (Taulukko 9.1) pätevät vain kun kiihtyvyydet α z tai a x ovat vakioita. Niitä ei siis pidä käyttää, kun kiihtyvyydet ovat ajasta riippuvia eli α z = α z(t) tai a x = a x(t) eivät ole vakioita.
 (9.12) voi käyttää. (a) Levyn kulmanopeudeksi ajanhetkellä t = 0.300 s saadaan yhtälöstä (9.7): ω z = ω 0z + α zt = 27.5 rad/s + ( 10.")
18 Esimerkki 9.3: Sammuessaan Blu-ray -levy hidastuu lopulta paikoilleen. Aluksi (t = 0) levyn pinnan P Q-viiva on +x akselilla (katso kuva). ω 0z = 27.5 rad/s ja α z = 10 rad/s 2 on vakio, joten yhtälöitä (9.7) (9.12) voi käyttää. (a) Levyn kulmanopeudeksi ajanhetkellä t = s saadaan yhtälöstä (9.7): ω z = ω 0z + α zt = 27.5 rad/s + ( 10.0 rad/s 2 )(0.300 s) = 24.5 rad/s mikä on pienempi kuin alussa, kuten pitääkin. (b) P Q-viiva tekee tällöin +x akselin suhteen kulman, joka yhtälöstä (9.11) on: θ = θ 0 + ω 0z t αzt2 = 0 + (27.5 rad/s)(0.300 s) ( 10.0 rad/s2 )(0.300 s) 2 ( ) kierrosta = 7.80 rad = 7.80 rad 1.24 kierrosta 2π rad Tarkistetaan käyttämällä (a)-kohdan tulosta yhtälössä (9.12): ( ω ωz 2 = ω0z α z(θ θ 0 ) θ = θ 0 + z ω0z 2 ) 2α z = 0 + (24.5 rad/s)2 (27.5 rad/s) 2 2( 10.0 rad/s 2 = 7.80 rad )
 liikkuu ympyrärataa pyörimisakselin ympäri jollain etäisyydellä r. Mitä nopeammin kappale pyörii sitä suurempi sen jokaisen hiukkasen (osan) vauhti on.")
19 Lineaarinen vauhti rotaatiossa Usein on tarpeen tuntea lineaarinen vauhti ja kiihtyvyys pyörivän kappaleen osalle. Jäykän pyörivän kappaleen jokainen hiukkanen (pisteessä P kuvassa 9.9) liikkuu ympyrärataa pyörimisakselin ympäri jollain etäisyydellä r. Mitä nopeammin kappale pyörii sitä suurempi sen jokaisen hiukkasen (osan) vauhti on. Vakiosäteisellä radalla on aina s = rθ ja sen aikaderivaatan itseisarvo on ds dt = r dθ dt, Lineaarinen nopeusvektori v on aina ympyrän tangentin suuntainen. Mitä kauempana hiukkanen on pyörimisakselilta sitä suurempi sen lineaarinen vauhti. Kuva 9.9 Jäykkä kappale pyörii kiinteän akselin ympäri. missä vasemmalla on hetkellinen vauhti v ja oikealla hetkellinen kulmavauhti dθ/dt = ω eli hetkellisen kulmanopeusvektorin magnitudi (rad/s). Tällöin v = rω (9.13)
 a rad ja tangentiaaliseen a tan komponenttiin (Kuva 9.")
20 Lineaarinen kiihtyvyys rotaatiossa Kuten aiemmin kappaleessa 3.4 esitettiin, ympyräliikkeessä olevan hiukkasen kiihtyvyys voidaan jakaa radiaalisuuntaiseen keskeiskiihtyvyyteen (keskihakuinen, centripetal) a rad ja tangentiaaliseen a tan komponenttiin (Kuva 9.10). Koska kiihtyvyyden tangentiaalikomponentti a tan on samansuuntainen hetkellisen tangentiaalisen vauhdin kanssa, on se vastuussa hiukkasen nopeuden magnitudin eli vauhdin muutoksesta. Ottamalla aikaderivaatta saadaan Kuva 9.10 Kiihtyvässä pyörimisliikkeessä oleva jäykkä kappale. a tan = dv dt = r dω = rα (9.14) dt Huomaa, että α = dω/dt tarkoittaa kulmavauhdin muutosnopeutta eli se ei ole sama kuin kulmanopeuden muutosnopeus eli kulmakiihtyvyys α z = dω z/dt.
21 Lineaarinen kiihtyvyys rotaatiossa Aina rotaatioakselia kohtisuorassa oleva hiukkasen kiihtyvyyskomponentti, radiaalinen keskeiskiihtyvyys a rad liittyy hiukkasen nopeuden suunnanmuutokseen (kts. kappale 3.4) ja se voidaan kirjoittaa yhtälön (9.13) mukaan ω:n avulla: Kuva 9.11 Käytä aina radiaaneja lineaaristen ja kulmamuuttujien yhtälöissä. a rad = v2 r = ω2 r, (9.15) mikä pätee vaikka ω ja v eivät olisi vakioita. Kiihtyvyyskomponenttien a tan ja a rad vektorisummana saadaan pyörivän kappaleen hiukkasen lineaarinen kiihtyvyysvektori a. Yhtälöt (9.1), (9.13) ja (9.14) pätevät myös hiukkasille, joilla on sama tangentiaalinen nopeus kuin jäykän kappaleen pisteellä (esim. sylinterin ympärille pyöritetty köysi, joka purkautuu lipsumatta ja venymättä). Yhtälö (9.15) pätee tällaisessa tapauksessa vain kohdissa, joissa köysi on kytketty sylinteriin.
22 Esimerkki 9.4: Urheilija pyörittää kiekkoa r = 80.0 cm säteistä ympyrää (Kuva 9.12a). Tietyllä hetkellä urheilija pyörii kulmavauhdilla ω = 10.0 rad/s ja pyöriminen kiihtyy eli kulmakiihtyvyyden magnitudi on α = 50.0 rad/s 2. Määritä kiekon lineaarinen kiihtyvyys ja sen komponentit tällä ajanhetkelle. Tätä voidaan käsitellä ympyräliikkeenä, jolloin tangentiaalinen ja radiaalinen sentripetaalikiihtyvyys sekä kokonaiskiihtyvyyden magnitudi voidaan laskea yhtälöistä (9.14) ja (9.15) sekä Pythagoraan teoreemasta (Kuva 9.12b): a tan = rα = (0.800 m)(50.0 rad/s 2 ) = 40.0 m/s 2 a rad = ω 2 r = (10.0 rad/s) 2 (0.800 m) = 80.0 m/s 2 a = a 2 tan + a2 rad 89.4 m/s2 Kuva 9.12 (a) Kiekko ympyräradalla. (b) Kiekon kiihtyvyyden komponentit.
23 Esimerkki 9.5: Suunniteltavana olevan lentokoneen potkurin (Kuva 9.13a) pitäisi pyöriä 2400 rpm (kierrosta minuutissa). Lentokoneen ilmalentovauhti eteenpäin pitäisi olla 75 m/s mutta potkurin siipien kärkien vauhti ei pitäisi ylittää 270 m/s (Mikä on n. 80% äänennopeudesta ilmassa. Jos vauhti olisi tätä suurempi, siivet tuottaisivat huomattavan kovaa ääntä.). (a) Mikä on potkurin säteen maksimipituus? (b) Mikä on tällöin potkurin siiven pään kiihtyvyys? (a) Muutetaan kulmanopeuden yksikkö: ) ( 2π rad 1 rev ω = 2400 rpm = ( 2400 rev min Kuvan 9.13b ja kaavan (9.13) avulla saadaan: v 2 tip = v2 plane + v2 tan = v2 plane + r2 ω 2, joten v 2 tip v2 plane ) ( 1 min ) 60s = 251 rad/s (270 m/s) 2 (75.0 m/s) rad/s = 1.03 m r 2 = v2 tip v2 plane ω 2 r = = ω (b) Koska potkurin kulmavauhti on vakio, siiven kärjellä ei ole tangentiaalikiihtyvyyttä vaan ainoastaan radiaalinen keskeiskiihtyvyys: a rad = ω 2 r = (251 rad/s) 2 (1.03 m) = m/s 2 ( 6600 g) Kuva 9.13 (a) Potkurilentokone lennossa. (b) Potkurin kärjen nopeuden komponentit.
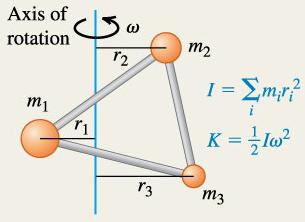
24 9.5 Yhdensuuntaisten akselien teoreema 9.6 Hitausmomenttilaskut Koska pyörivässä kappaleessa massa on liikkeessä, kappaleella on liike- eli kineettistä energiaa. Kappale voidaan ajatella koostuvan hiukkasista (indeksi i), joiden massa on m i ja r i niiden kohtisuora etäisyys pyörimisakselilta. Koska tällöin i-hiukkasen vauhti on v i = r i ω (kulmavauhti on sama kaikille hiukkasille), sen kineettinen energia on: 1 2 m iv 2 i = 1 2 m ir 2 i ω2 Kappaleen kineettinen kokonaisenergia saadaan kaikkien hiukkasten kineettisten energioiden summana: K = 1 2 m 1r 2 1 ω m 2r 2 2 ω2 + = i 1 2 m ir 2 i ω2. Sen kaikilla termeillä on yhteinen tekijä ω 2 /2, joten: K = 1 ( m1 r 2 1 2ω m 2r2 2ω ) = 1 ( 2 i m iri 2 ) ω 2. Suluissa oleva suure, eli massa kertaa etäisyyden neliö summattuna yli kaikkien hiukkasten, on kappaleen hitausmomentti (moment of inertia, inertiamomentti) kyseisen akselin suhteen I = m 1 r m 2r = i m i r 2 i (9.16) Selvästikin hitausmomentin [SI: [I] = (kg m 2 )] suuruus on riippuvainen massan jakautumisesta suhteessa valittuun pyörimisakseliin.

25 9.5 Yhdensuuntaisten akselien teoreema 9.6 Hitausmomenttilaskut Mitä kauemmaksi kappaleen massa on jakautunut pyörimisakselista sitä suurempi hitausmomentti on. Jäykälle kappaleelle hiukkasten etäisyydet r i ovat vakioita, joten I ei riipu pyörimisen luonteesta valitun akselin ympärillä. Hitausmomentin avulla kineettinen rotaatioenergia (pyörimisenergia) (rotational kinetic energy) K ([K] = J) eli jäykän pyörijän muodostamien hiukkasten kineettisten energioiden summa on ([ω] = rad/s): Kuva 9.14 Vertikaalisen pyörijän hitausmomentti ja siten se kineettinen energia riippuu punnusten horisontaalisesta paikasta. K = 1 2 Iω2 (9.17) Yhtälö antaa yksinkertaisen fysikaalisen merkityksen I:lle: Kulmavauhdilla ω pyörivän jäykän kappaleen rotaatioenergia on sitä suurempi mitä suurempi hitausmomentti I on. K vastaa kappaleen kiihdyttämiseen lepotilasta tarvittavaa työtä, joten mitä suurempi I sitä raskaampaa on saada kappale pyörimään tai pyörivä kappale pysähtymään. Tästä syystä I:tä kutsutaan myös rotationaaliseksi inertiaksi (rotational inertia) eli se on massan vastine pyörimisliikkeelle.
26 9.5 Yhdensuuntaisten akselien teoreema 9.6 Hitausmomenttilaskut Esimerkki 9.6: Kuvan 9.15 mukainen koneen osa koostuu kolmesta levystä, jotka on kytketty kevyillä tukitankoilla toisiinsa. (a) Mikä on hitausmomentti A kappaleen keskiakselin suhteen? (b) Entä B ja C kappaleiden keskipisteiden kautta kulkevan akselin suhteen? (c) Mikä on kappaleen kineettinen pyörimisenergia, kun se pyörii kulmavauhdilla ω = 4.0 rad/s A akselin ympäri? Kuva 9.15 Koneen osa. Approksimoidaan tukien massa häviävän pieneksi ja levyt massahiukkasina niiden keskipisteissä. (a) Tällöin A levyn massa on pyörimisakselilla eli se ei kontribuoi hitausmomenttiin vaan ainoastaan B ja C levyt. Hitausmomentti A akselin suhteen on kaavan (9.16) mukaisesti: I A = i m ir 2 i = (0.10 kg)(0.50 m) 2 + (0.20 kg)(0.40 m) 2 = ( ) kg m 2 = kg m 2 (b) Sekä B että C levy on BC pyörimisakselilla, joten ainoastaan A levy vaikuttaa hitausmomenttiin BC akselin suhteen, joka on: I BC = (0.30 kg)(0.40 m) 2 = kg m 2 (c) Yhtälö (9.17) antaa: K A = 1 2 I Aω 2 = 1 2 (0.057 kg m2 )(4.0 rad/s) 2 = J 0.46 J Koska I A > I BC, on koneen osaa helpompi pyörittää BC akselin ympäri.
. Kuitenkin jatkuville kappaleille summan sijasta täytyy laskea integraali kappaleen tilavuuden yli. Taulukossa 9.")
27 9.5 Yhdensuuntaisten akselien teoreema 9.6 Hitausmomenttilaskut Yksittäisille pistemäisille massoille voidaan käyttää yhtälöä (9.16) kuten esimerkissä (9.6). Kuitenkin jatkuville kappaleille summan sijasta täytyy laskea integraali kappaleen tilavuuden yli. Taulukossa 9.2 on esitetty näin saadut hitausmomenttiyhtälöt muutamille yleisille kappaleen muodoille. Ne pätevät vain tasaisesti jakautuneelle (homogenous, uniform) materialle eli kappaleiden tiheys on kaikissa osissa sama. Huom! Yhtenäisten kappaleiden hitausmomenttia ei voi laskea massakeskipisteeseen sijoitetun kokonaismassan hitausmomenttina. Esim. taulukon 9.2 (b)-tapaus olisi tällöin I = 1 4 ML2, mikä on väärin! Taulukko 9.2 Kappaleiden hitausmomentteja.
 venymätön kaapeli on pyöritetty kiinteän sylinterin (m = 50 kg, d = 0.120 m) ympärille, joka pyörii horisontaaliakselin ympäri kitkattomilla laakereilla.")
28 9.5 Yhdensuuntaisten akselien teoreema 9.6 Hitausmomenttilaskut Esimerkki 9.7, Purkautuva kaapeli I Kuvan 9.16 mukaisesti kevyt (massaton) venymätön kaapeli on pyöritetty kiinteän sylinterin (m = 50 kg, d = m) ympärille, joka pyörii horisontaaliakselin ympäri kitkattomilla laakereilla. Lasketaan sylinterin kulmavauhti ω ja kaapelin vauhti v = Rω lopussa, kun kaapelia kiskotaan voimalla F = 9.0 N matkan s = 2.0 m. Ratkaistaan energiamenetelmällä: vain sylinterillä on K (K 1 = 0 ja K 2 = 1 2 Iω2 ). Myöskään gravitaatiopotentiaalienergia ei muutu eli voidaan valita U 1 = U 2 = 0. Kaapeli kohdistaa sylinteriin vain vetovoiman F ja koska kaapeli ei lipsu, kitkatyöhön ei kulu energiaa, joten systeemiin tehdään ainoastaan työ W = F s = (9.0 N)(2.0 m) = 18 J. Sylinterin hitausmomentti on I = mr 2 /2 = 1/2 (50 kg)(0.060 m) 2 = kg m 2 Kuva 9.16 Kaapeli purkautuu sylinterin ympäriltä. K 1 + U 1 + W = K 2 + U W = 1 2 Iω W 2(18 J) ω = = = 20 rad/s I kg m2 v = Rω = (0.060 m)(20 rad/s) = 1.2 m/s
29 9.5 Yhdensuuntaisten akselien teoreema 9.6 Hitausmomenttilaskut Esimerkki 9.8, Purkautuva kaapeli II: Nyt alussa paikoillaan olevaan M massaiseen R säteiseen sylinteriin on ripustettu keveällä venymättömällä kaapelilla punnus m korkeudelle h. Kehitetään yhtälöt sylinterin kulmavauhdille ω ja punnuksen vauhdille v lopputilanteessa, jossa punnus osuu lattiaan. Koska kaapeli oletetaan massattomaksi, se kohdistaa sekä sylinteriin että punnukseen samansuuruisen voiman eikä tee työtä. Tehty työ W = 0, koska ainoastaan gravitaatiopotentiaali muuttuu U 1 = mgh U 2 = 0 (valittu). Lopussa juuri ennen pysähtymistä systeemissä on kineettistä energiaa: K 2 = 1 2 mv Iω2 = 1 2 mv ( 1 2 MR2) ( v R ) 2 = 1 2 ( m M) v 2 Odotusten mukaisesti, kun M m, v on hyvin pieni ja toisaalta kun m M, v 2gh eli punnus putoaa lähes vapaasti. Kuva 9.17 Systeemin alku ja lopputila. K 1 + U 1 + W = K 2 + U mgh + 0 = 1 (m + 12 ) 2 M v gh v = 1 + M/2m Sylinterin loppukulmavauhti on ω = v/r.
 kulkevan kaapelin massa, pitää osata laskea sen gravitaatiopotentiaalienergia.")
30 9.5 Yhdensuuntaisten akselien teoreema 9.6 Hitausmomenttilaskut Ojentuneen kappaleen gravitaatiopotentiaalienergia Jotta esimerkissä 9.8 voitaisiin ottaa huomioon pystysuorassa (y akseli) kulkevan kaapelin massa, pitää osata laskea sen gravitaatiopotentiaalienergia. Jos tällaisen M massaisen ojentuneen kappaleen kaikkiin osiin kohdistuu sama kiihtyvyys g on gravitaatiopotentiaalienergia summa massaelementteihin m i potentiaalienergioista: Kuva 9.18 Fosburyn floppi -korkeushyppytekniikassa massakeskipiste (cm) kulkee riman ali. Eli gravitaatiopotentiaalienergian [yhtälö (9.18)] tarvitsee lisääntyä vähemmän kuin aiemmassa tekniikassa, jossa massakeskipiste vietiin riman yli. U = m 1 gy 1 + m 2 gy 2 + = (m 1 y 1 + m 2 y )g [massakeskipisteen koordinaatin avulla (8.28)] = (m 1 + m )y cmg U = Mgy cm (9.18) Eli gravitaatiopotentiaalienergia voidaan laskea kappaleen kokonaismassalle M massakeskipisteessä (y cm, +y akseli vertikaalisesti ylöspäin gravitaatiokentässä).
31 9.5 Yhdensuuntaisten akselien teoreema 9.6 Hitausmomenttilaskut 9.5 Yhdensuuntaisten akselien teoreema (Steinerin sääntö) Kappaleella on ääretön määrä rotaatio- ja siis myös hitausmomenttiakseleita. Kuitenkin M massaisen kappaleen hitausmomenteille yhdensuuntaisten akseleiden suhteen, jotka kulkevat massakeskipisteen (I cm) ja P pisteen kautta (I P ), on voimassa yhteys eli ns. yhdensuuntaisten akseleiden teoreema (parallel-axis theorem): Kuva 9.19 Massaelementillä m i on (x i, y i ) koordinaatit massakeskipisteen (cm, origossa) ja (x i a, y i b) koordinaatit P pisteen kautta kulkevien yhdensuuntaisten rotaatioakselien suhteen. I P = I cm + Md 2 (9.19) missä d = a 2 + b 2 on P pisteen (kohdassa (x, y) = (a, b)) etäisyys origossa olevasta kappaleen massakeskipisteestä (x cm = y cm = z cm = 0).
32 9.5 Yhdensuuntaisten akselien teoreema 9.6 Hitausmomenttilaskut 9.5 Yhdensuuntaisten akselien teoreema (Steinerin sääntö) Hitausmomentti massakeskipisteen kautta kulkevan akselin suhteen voidaan kirjoittaa kappaleen viipaleelle kohdassa (x i, y i, z i ) massalementtien (hiukkasten) m i yli summana: I cm = i m i ( x 2 i + y 2 i ). Vastaavasti P pisteen kautta kulkevan akselin suhteen kaikille hiukkasille kaikissa viipaleissa z i : I P = [ m i (x i a) 2 + (y i b) 2] i = ( m i x 2 i + y 2 ) i 2a m i x i 2b m i y i i i i }{{}}{{}}{{} I cm =2aMx cm=0 =2bMy cm=0 + ( a 2 + b 2) m i = I cm + Md 2 } {{ i } Md 2 Kappale siis pyörii helpoimmin ja luonnollisimmin massakeskipisteen kautta kulkevan akselin suhteen. Kuva 9.19 Massalla m i on (x i, y i ) koordinaatit massakeskipisteen (cm, origossa) ja (x i a, y i b) koordinaatit P pisteen kautta kulkevien yhdensuuntaisten rotaatioakselien suhteen. Jäykän kappaleen hitausmomentti on cm-pisteen kautta kulkevan akselin suhteen pienempi kuin minkään muun samansuuntaisen akselin.
 hitausmomentti on mitattu: I P = 0.132 kg m 2. Laske I cm. Yhtälöstä (9.19): I cm = I P Md 2 = 0.132 kg m 2 (3.6 kg)(0.15 m) 2 = 0.051 kg m 2 mikä on odotetusti pienempi kuin I P. Kuva 9.")
33 9.5 Yhdensuuntaisten akselien teoreema 9.6 Hitausmomenttilaskut 9.5 Yhdensuuntaisten akselien teoreema (Steinerin sääntö) Esimerkki 9.9: Kuvan 9.20 mekaanisen kiinnikkeen (m = 3.6 kg) hitausmomentti on mitattu: I P = kg m 2. Laske I cm. Yhtälöstä (9.19): I cm = I P Md 2 = kg m 2 (3.6 kg)(0.15 m) 2 = kg m 2 mikä on odotetusti pienempi kuin I P. Kuva 9.15 I cm:n laskeminen mitatusta I P :stä.
, pistemäisten massojen summan sijasta pitää integroida pienten massalementtien dm yli: I = r 2 dm (9.")
34 9.6 Hitausmomenttilaskut 9.5 Yhdensuuntaisten akselien teoreema 9.6 Hitausmomenttilaskut Kun jäykän kappaleen massa on jatkuvasti jakautunut (pallo, sylinteri), pistemäisten massojen summan sijasta pitää integroida pienten massalementtien dm yli: I = r 2 dm (9.20) Kuva 9.20 Maan tiheys ei ole sama kaikkialla, esim. ydin on huomattavasti tiheämpi kuin pintaosat. 1D-kappaleelle (ohut sauva) dm saadaan esim. x koordinaatin avulla (dm = M dx). 3D-kappaleelle se kannattaa esittää tiheyden (ρ) ja tilavuuselementin (dv ) avulla: dm = ρdv ρ = dm/dv eli hitausmomentti riippuu ρ:n vaihtelusta: I = r 2 ρ dv Tilavuuselementin integroimismuuttujat (esim. dv = dxdydz) kannattaa valita siten että sen sisältämät pisteet ovat mahdollisimman samalla etäisyydellä pyörimisakselilta. mutta ρ = vakio homogeeniselle kappaleelle I = ρ r 2 dv (9.21) Integroimisrajat määräytyvät kappaleen muodosta ja dimensioista.
: R2 I = r 2 dm = r 2 ρ (2πrL dr) R 1 R2 = 2πρL r 3 dr = 2πρL ( R 4 R 1 4 2 R1) 4 = πρl ( R 2 2 2 R1 2 ) ( R 2 2 + R1)")
35 9.6 Hitausmomenttilaskut 9.5 Yhdensuuntaisten akselien teoreema 9.6 Hitausmomenttilaskut Esimerkki Sylinterin pyöriminen symmetria-akselinsa suhteen. Sylinterille luonnollinen massaelementti on sylinterinkuori dm = ρdv = ρ(2πrl dr): R2 I = r 2 dm = r 2 ρ (2πrL dr) R 1 R2 = 2πρL r 3 dr = 2πρL ( R 4 R R1) 4 = πρl ( R R1 2 ) ( R R1) 2 Kuva 9.22 Sylinterin hitausmomentti symmetria-akselin suhteen. Sylinterin vaipan tilavuudesta ja tiheydestä saadaan kokonaismassa: V = πl ( R2 2 R1 2 ) M = ρv = πρl ( R 2 2 R2 1), jonka avulla hitausmomentti I = 1 2 M ( R1 2 + ) R2 2 Umpinaiselle sylinterille R 2 = R ja R 1 = 0, joten hitausmomentti on I = 1 2 MR2. Jos taas sylinterin kuori on hyvin ohut eli R 2 R 1 = R hitausmomentiksi tulee I = MR 2. Sama tulos tulee suoraan, kun r = R: I = r 2 dm = R 2 dm = MR 2.
 pallolle luonnollinen massaelementti keskipisteen kautta kulkevan x akselin suhteen on sitä vastaan kohtisuorassa oleva ohut kiekko: dm = ρ dv = ρ πr 2 dx = ρ π(r 2 x 2 ) dx.")
36 9.6 Hitausmomenttilaskut 9.5 Yhdensuuntaisten akselien teoreema 9.6 Hitausmomenttilaskut Esimerkki Pallon pyöriminen keskipisteen kautta kulkevan akselin ympäri. Homogeeniselle (ρ =vakio) pallolle luonnollinen massaelementti keskipisteen kautta kulkevan x akselin suhteen on sitä vastaan kohtisuorassa oleva ohut kiekko: dm = ρ dv = ρ πr 2 dx = ρ π(r 2 x 2 ) dx. Otetaan edellisen esimerkin umpinaisen sylinterin hitausmomentti, joka ohuelle r säteiselle ja dm-massaiselle kiekolle on: di = 1 2 r2 dm = 1 ( 2 R 2 x 2) [ ρ π(r 2 x 2 ) dx ] = πρ ( 2 R 2 x 2) 2 dx. Integroidaan välillä x = 0 ja x = R (puolipallo) ja kerrotaan kahdella: I = (2) πρ ( 2 R 2 x 2) 2 dx = = 8πρR 5 15 Koska pallolle V = 4πR3 3, tulee tiheydeksi: ρ = M V = 3M 4πR 3. Kuva 9.23 Pallon hitausmomentti sen keskipisteen kautta kulkevalle akselille. Pallon ( hittausmomentti ) ( ) on siis: I = 8πR 5 3M 15 4πR 3 = 2 5 MR2, mikä on pienempi kuin sylinterille (I = 1 2 MR2 ), koska pallon massa on jakautunut lähemmäksi pyörimisakselia.




37 9. luvun yhteenveto 9.5 Yhdensuuntaisten akselien teoreema 9.6 Hitausmomenttilaskut Rotaatiokinematiikka: Hitausmomentti ja kineettinen pyörimisenergia: Lineaarisen ja rotaatioliikkeen yhteys: Hitausmomentin laskeminen, paralleeliakseliteoreema, jatkuvan massajakauman integrointi:
Luento 5: Käyräviivainen liike. Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat θ, ω ja α Yhdistetty liike
 Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat θ, ω ja α Yhdistetty liike 1 / 29 Luennon sisältö Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat
Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat θ, ω ja α Yhdistetty liike 1 / 29 Luennon sisältö Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat
Luento 3: Käyräviivainen liike
 Luento 3: Käyräviivainen liike Kertausta viime viikolta Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat θ, ω ja α Yhdistetty liike Luennon sisältö Kertausta viime viikolta Käyräviivainen liike
Luento 3: Käyräviivainen liike Kertausta viime viikolta Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat θ, ω ja α Yhdistetty liike Luennon sisältö Kertausta viime viikolta Käyräviivainen liike
Jakso 1: Pyörimisliikkeen kinematiikkaa, hitausmomentti
 Jakso 1: Pyörimisliikkeen kinematiikkaa, hitausmomentti Kertausta Ympyrärataa kiertävälle kappaleelle on määritelty käsitteet kulmanopeus ja kulmakiihtyvyys seuraavasti: ω = dθ dt dω ja α = dt Eli esimerkiksi
Jakso 1: Pyörimisliikkeen kinematiikkaa, hitausmomentti Kertausta Ympyrärataa kiertävälle kappaleelle on määritelty käsitteet kulmanopeus ja kulmakiihtyvyys seuraavasti: ω = dθ dt dω ja α = dt Eli esimerkiksi
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 22.3.2016 Susanna Hurme Päivän aihe: Rotaatioliikkeen kinematiikka: kulmanopeus ja -kiihtyvyys (Kirjan luvut 12.7, 16.3) Osaamistavoitteet Osata analysoida jäykän
KJR-C1001 Statiikka ja dynamiikka Luento 22.3.2016 Susanna Hurme Päivän aihe: Rotaatioliikkeen kinematiikka: kulmanopeus ja -kiihtyvyys (Kirjan luvut 12.7, 16.3) Osaamistavoitteet Osata analysoida jäykän
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys10 Syksy 009 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
Mekaniikan jatkokurssi Fys10 Syksy 009 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys10 Kevät 010 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
Mekaniikan jatkokurssi Fys10 Kevät 010 Jukka Maalampi LUENTO 1 Jäykän kappaleen pyöriminen Knight, Ch 1 Jäykkä kappale = kappale, jonka koko ja muoto eivät muutu liikkeen aikana. Jäykkä kappale on malli.
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 23.3.2016 Susanna Hurme Rotaatioliikkeen kinetiikka: hitausmomentti ja liikeyhtälöt (Kirjan luvut 17.1, 17.2 ja 17.4) Osaamistavoitteet Ymmärtää hitausmomentin
KJR-C1001 Statiikka ja dynamiikka Luento 23.3.2016 Susanna Hurme Rotaatioliikkeen kinetiikka: hitausmomentti ja liikeyhtälöt (Kirjan luvut 17.1, 17.2 ja 17.4) Osaamistavoitteet Ymmärtää hitausmomentin
Luento 3: Käyräviivainen liike
 Luento 3: Käyräviivainen liike Kertausta viime viikolta Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat,! ja Yhdistetty liike 2015-09-14 13:50:32 1/40 luentokalvot_03_combined.pdf (#36) Luennon
Luento 3: Käyräviivainen liike Kertausta viime viikolta Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat,! ja Yhdistetty liike 2015-09-14 13:50:32 1/40 luentokalvot_03_combined.pdf (#36) Luennon
Luento 5: Käyräviivainen liike
 Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat,! ja Yhdistetty liike Ajankohtaista Konseptitesti 1 Kysymys Viereisessä kuvassa leppäkerttu istuu karusellissa,
Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat,! ja Yhdistetty liike Ajankohtaista Konseptitesti 1 Kysymys Viereisessä kuvassa leppäkerttu istuu karusellissa,
Luento 5: Käyräviivainen liike
 Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat,! ja Yhdistetty liike Ajankohtaista Konseptitesti 1 http://presemo.aalto.fi/mekaniikka2017 Kysymys Sotalaivasta
Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat,! ja Yhdistetty liike Ajankohtaista Konseptitesti 1 http://presemo.aalto.fi/mekaniikka2017 Kysymys Sotalaivasta
Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia
 Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa 1 / 31 Luennon sisältö Suhteellinen translaatioliike
Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa 1 / 31 Luennon sisältö Suhteellinen translaatioliike
Luento 7: Pyörimisliikkeen dynamiikkaa
 Luento 7: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Harjoituksia ja laskettuja esimerkkejä 1 / 37 Luennon sisältö Johdanto
Luento 7: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Harjoituksia ja laskettuja esimerkkejä 1 / 37 Luennon sisältö Johdanto
Luento 7: Pyörimisliikkeen dynamiikkaa
 Luento 7: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Laskettuja esimerkkejä Luennon sisältö Johdanto Vääntömomentti Hitausmomentti
Luento 7: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Laskettuja esimerkkejä Luennon sisältö Johdanto Vääntömomentti Hitausmomentti
Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia
 Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Pyörimisliikkeestä Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia Luennon sisältö Suhteellinen translaatioliike
Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Pyörimisliikkeestä Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia Luennon sisältö Suhteellinen translaatioliike
kertausta Esimerkki I
 tavoitteet kertausta osaat määrittää jäykän kappaleen hitausmomentin laskennallisesti ymmärrät kuinka vierimisessä eteneminen ja pyöriminen kytekytyvät osaat soveltaa energiaperiaatetta vierimisongelmiin
tavoitteet kertausta osaat määrittää jäykän kappaleen hitausmomentin laskennallisesti ymmärrät kuinka vierimisessä eteneminen ja pyöriminen kytekytyvät osaat soveltaa energiaperiaatetta vierimisongelmiin
Fysiikka ei kerro lopullisia totuuksia. Jokin uusi havainto voi vaatia muuttamaan teorioita.
 766323A Mekaniikka Mansfield and O Sullivan: Understanding physics kpl 1 ja 2. Näitä löytyy myös Young and Freedman: University physics -teoksen luvuissa 2 ja 3, s. 40-118. Johdanto Fysiikka on perustiede.
766323A Mekaniikka Mansfield and O Sullivan: Understanding physics kpl 1 ja 2. Näitä löytyy myös Young and Freedman: University physics -teoksen luvuissa 2 ja 3, s. 40-118. Johdanto Fysiikka on perustiede.
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 31.3.2016 Susanna Hurme Dynamiikan välikoe 4.4.2016 Ajankohta ma 4.4.2016 klo 16:30 19:30 Salijako Aalto-Sali: A-P (sukunimen alkukirjaimen mukaan) Ilmoittautuminen
KJR-C1001 Statiikka ja dynamiikka Luento 31.3.2016 Susanna Hurme Dynamiikan välikoe 4.4.2016 Ajankohta ma 4.4.2016 klo 16:30 19:30 Salijako Aalto-Sali: A-P (sukunimen alkukirjaimen mukaan) Ilmoittautuminen
Luento 9: Pyörimisliikkeen dynamiikkaa
 Luento 9: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Harjoituksia ja laskettuja esimerkkejä ELEC-A3110 Mekaniikka (5 op) Sami
Luento 9: Pyörimisliikkeen dynamiikkaa Johdanto Vääntömomentti Hitausmomentti ja sen määrittäminen Liikemäärämomentti Gyroskooppi Harjoituksia ja laskettuja esimerkkejä ELEC-A3110 Mekaniikka (5 op) Sami
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
Luvun 10 laskuesimerkit
 Luvun 10 laskuesimerkit Esimerkki 10.1 Tee-se-itse putkimies ei saa vesiputken kiinnitystä auki putkipihdeillään, joten hän päättää lisätä vääntömomenttia jatkamalla pihtien vartta siihen tiukasti sopivalla
Luvun 10 laskuesimerkit Esimerkki 10.1 Tee-se-itse putkimies ei saa vesiputken kiinnitystä auki putkipihdeillään, joten hän päättää lisätä vääntömomenttia jatkamalla pihtien vartta siihen tiukasti sopivalla
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 29.3.2016 Susanna Hurme Yleisen tasoliikkeen kinematiikka: absoluuttinen ja suhteellinen liike, rajoitettu liike (Kirjan luvut 16.4-16.7) Osaamistavoitteet Ymmärtää,
KJR-C1001 Statiikka ja dynamiikka Luento 29.3.2016 Susanna Hurme Yleisen tasoliikkeen kinematiikka: absoluuttinen ja suhteellinen liike, rajoitettu liike (Kirjan luvut 16.4-16.7) Osaamistavoitteet Ymmärtää,
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 24.3.2016 Susanna Hurme Rotaatioliikkeen liike-energia, teho ja energiaperiaate (Kirjan luku 18) Osaamistavoitteet Ymmärtää, miten liike-energia määritetään kiinteän
KJR-C1001 Statiikka ja dynamiikka Luento 24.3.2016 Susanna Hurme Rotaatioliikkeen liike-energia, teho ja energiaperiaate (Kirjan luku 18) Osaamistavoitteet Ymmärtää, miten liike-energia määritetään kiinteän
ELEC-A3110 Mekaniikka (5 op)
") ELEC-A3110 Mekaniikka (5 op) Yliopistonlehtori, tkt Sami Kujala Mikro- ja nanotekniikan laitos Syksy 2016 1 / 21 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia
ELEC-A3110 Mekaniikka (5 op) Yliopistonlehtori, tkt Sami Kujala Mikro- ja nanotekniikan laitos Syksy 2016 1 / 21 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 16.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinetiikka (Kirjan luvut 12.6, 13.1-13.3 ja 17.3) Oppimistavoitteet Ymmärtää, miten Newtonin toisen lain
KJR-C1001 Statiikka ja dynamiikka Luento 16.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinetiikka (Kirjan luvut 12.6, 13.1-13.3 ja 17.3) Oppimistavoitteet Ymmärtää, miten Newtonin toisen lain
Differentiaali- ja integraalilaskenta 3 Mallit laskuharjoitukseen 3 /
 MS-A3x Differentiaali- ja integraalilaskenta 3, IV/6 Differentiaali- ja integraalilaskenta 3 Mallit laskuharjoitukseen 3 / 9..-.3. Avaruusintegraalit ja muuttujanvaihdot Tehtävä 3: Laske sopivalla muunnoksella
MS-A3x Differentiaali- ja integraalilaskenta 3, IV/6 Differentiaali- ja integraalilaskenta 3 Mallit laskuharjoitukseen 3 / 9..-.3. Avaruusintegraalit ja muuttujanvaihdot Tehtävä 3: Laske sopivalla muunnoksella
Kerrataan harmoninen värähtelijä Noste, nesteen ja kaasun aiheuttamat voimat Noste ja harmoninen värähtelijä (laskaria varten)
") Noste Ympyräliike I Luennon tavoitteet Kerrataan harmoninen värähtelijä Noste, nesteen ja kaasun aiheuttamat voimat Noste ja harmoninen värähtelijä (laskaria varten) Aloitetaan ympyräliikettä Keskeisvoiman
Noste Ympyräliike I Luennon tavoitteet Kerrataan harmoninen värähtelijä Noste, nesteen ja kaasun aiheuttamat voimat Noste ja harmoninen värähtelijä (laskaria varten) Aloitetaan ympyräliikettä Keskeisvoiman
Luento 10: Työ, energia ja teho. Johdanto Työ ja kineettinen energia Teho
 Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho 1 / 23 Luennon sisältö Johdanto Työ ja kineettinen energia Teho 2 / 23 Johdanto Energia suure, joka voidaan muuttaa muodosta toiseen,
Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho 1 / 23 Luennon sisältö Johdanto Työ ja kineettinen energia Teho 2 / 23 Johdanto Energia suure, joka voidaan muuttaa muodosta toiseen,
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 30.3.2016 Susanna Hurme Yleisen tasoliikkeen kinetiikka (Kirjan luku 17.5) Osaamistavoitteet Osata ratkaista voimia ja niiden aiheuttamia kiihtyvyyksiä tasoliikkeessä
KJR-C1001 Statiikka ja dynamiikka Luento 30.3.2016 Susanna Hurme Yleisen tasoliikkeen kinetiikka (Kirjan luku 17.5) Osaamistavoitteet Osata ratkaista voimia ja niiden aiheuttamia kiihtyvyyksiä tasoliikkeessä
MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 11: Taso- ja tilavuusintegraalien sovellutuksia
 MS-A25/MS-A26 ifferentiaali- ja integraalilaskenta 2 Luento 11: Taso- ja tilavuusintegraalien sovellutuksia Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät 216 1 Perustuu
MS-A25/MS-A26 ifferentiaali- ja integraalilaskenta 2 Luento 11: Taso- ja tilavuusintegraalien sovellutuksia Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät 216 1 Perustuu
DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi
 Arttu Polojärvi") DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Suhteellisen liikkeen nopeuden ja kiihtyvyyden yhtälöt. Jäykän kappaleen partikkelin liike. Jäykän
DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Suhteellisen liikkeen nopeuden ja kiihtyvyyden yhtälöt. Jäykän kappaleen partikkelin liike. Jäykän
Derivoimalla kerran saadaan nopeus ja toisen kerran saadaan kiihtyvyys Ña r
 Vuka HT 4 Tehtävä. Lyhyenä alustuksena tehtävään johdetaan keskeiskiihtyvyys tasaisessa pyörimisessä. Meillä on ympyräradalla liikkuva kappale joka pyörii vakiokulmanopeudella ω dϕ säteellä r origosta.
Vuka HT 4 Tehtävä. Lyhyenä alustuksena tehtävään johdetaan keskeiskiihtyvyys tasaisessa pyörimisessä. Meillä on ympyräradalla liikkuva kappale joka pyörii vakiokulmanopeudella ω dϕ säteellä r origosta.
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys102 Kevät 2010 Jukka Maalampi LUENTO 2-3 Vääntömomentti Oletus: Voimat tasossa, joka on kohtisuorassa pyörimisakselia vastaan. Oven kääntämiseen tarvitaan eri suuruinen voima
Mekaniikan jatkokurssi Fys102 Kevät 2010 Jukka Maalampi LUENTO 2-3 Vääntömomentti Oletus: Voimat tasossa, joka on kohtisuorassa pyörimisakselia vastaan. Oven kääntämiseen tarvitaan eri suuruinen voima
(a) Potentiaali ja virtafunktiot saadaan suoraan summaamalla lähteen ja pyörteen funktiot. Potentiaalifunktioksi
 Potentiaali ja virtafunktiot saadaan suoraan summaamalla lähteen ja pyörteen funktiot. Potentiaalifunktioksi") Tehtävä 1 Tornadon virtauskenttää voidaan approksimoida kaksiulotteisen nielun ja pyörteen summana Oleta, että nielun voimakkuus on m < ja pyörteen voimakkuus on > (a Määritä tornadon potentiaali- ja virtafunktiot
Tehtävä 1 Tornadon virtauskenttää voidaan approksimoida kaksiulotteisen nielun ja pyörteen summana Oleta, että nielun voimakkuus on m < ja pyörteen voimakkuus on > (a Määritä tornadon potentiaali- ja virtafunktiot
a) Piirrä hahmotelma varjostimelle muodostuvan diffraktiokuvion maksimeista 1, 2 ja 3.
 Piirrä hahmotelma varjostimelle muodostuvan diffraktiokuvion maksimeista 1, 2 ja 3.") Ohjeita: Tee jokainen tehtävä siististi omalle sivulleen/sivuilleen. Merkitse jos tehtävä jatkuu seuraavalle konseptille. Kirjoita ratkaisuihin näkyviin tarvittavat välivaiheet ja perustele lyhyesti käyttämästi
Ohjeita: Tee jokainen tehtävä siististi omalle sivulleen/sivuilleen. Merkitse jos tehtävä jatkuu seuraavalle konseptille. Kirjoita ratkaisuihin näkyviin tarvittavat välivaiheet ja perustele lyhyesti käyttämästi
766323A Mekaniikka, osa 2, kl 2015 Harjoitus 4
 766323A Mekaniikka, osa 2, kl 2015 Harjoitus 4 0. MUISTA: Tenttitehtävä tulevassa päätekokeessa: Fysiikan säilymislait ja symmetria. (Tästä tehtävästä voi saada tentissä kolme ylimääräistä pistettä. Nämä
766323A Mekaniikka, osa 2, kl 2015 Harjoitus 4 0. MUISTA: Tenttitehtävä tulevassa päätekokeessa: Fysiikan säilymislait ja symmetria. (Tästä tehtävästä voi saada tentissä kolme ylimääräistä pistettä. Nämä
Voima F tekee työtä W vaikuttaessaan kappaleeseen, joka siirtyy paikasta r 1 paikkaan r 2. Työ on skalaarisuure, EI vektori!
 6.1 Työ Voima F tekee työtä W vaikuttaessaan kappaleeseen, joka siirtyy paikasta r 1 paikkaan r 2. Työ on skalaarisuure, EI vektori! Siirtymä s = r 2 r 1 Kun voiman kohteena olevaa kappaletta voidaan kuvata
6.1 Työ Voima F tekee työtä W vaikuttaessaan kappaleeseen, joka siirtyy paikasta r 1 paikkaan r 2. Työ on skalaarisuure, EI vektori! Siirtymä s = r 2 r 1 Kun voiman kohteena olevaa kappaletta voidaan kuvata
Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia
 Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Pyörimisliikkeestä Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa Konseptitesti 1 Kysymys
Luento 4: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Pyörimisliikkeestä Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa Konseptitesti 1 Kysymys
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 10: Moninkertaisten integraalien sovelluksia
 Luento 10: Moninkertaisten integraalien sovelluksia") MS-A22 ifferentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Moninkertaisten integraalien sovelluksia Antti Rasila Aalto-yliopisto Syksy 215 Antti Rasila (Aalto-yliopisto) MS-A22 Syksy 215 1 / 2 Moninkertaisten
MS-A22 ifferentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Moninkertaisten integraalien sovelluksia Antti Rasila Aalto-yliopisto Syksy 215 Antti Rasila (Aalto-yliopisto) MS-A22 Syksy 215 1 / 2 Moninkertaisten
Fysiikan valintakoe 10.6.2014, vastaukset tehtäviin 1-2
 Fysiikan valintakoe 10.6.2014, vastaukset tehtäviin 1-2 1. (a) W on laatikon paino, F laatikkoon kohdistuva vetävä voima, F N on pinnan tukivoima ja F s lepokitka. Kuva 1: Laatikkoon kohdistuvat voimat,
Fysiikan valintakoe 10.6.2014, vastaukset tehtäviin 1-2 1. (a) W on laatikon paino, F laatikkoon kohdistuva vetävä voima, F N on pinnan tukivoima ja F s lepokitka. Kuva 1: Laatikkoon kohdistuvat voimat,
Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia
 Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa Ajankohtaista FuksiProffaBuffa Järjestetään
Luento 6: Suhteellinen liike ja koordinaatistomuunnoksia Suhteellinen translaatioliike Suhteellinen pyörimisliike Tyypillisiä koordinaatistomuunnoksia extraa Ajankohtaista FuksiProffaBuffa Järjestetään
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 10: Moninkertaisten integraalien sovelluksia
 Luento 10: Moninkertaisten integraalien sovelluksia") MS-A22 ifferentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Moninkertaisten integraalien sovelluksia Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 217 Antti Rasila (Aalto-yliopisto)
MS-A22 ifferentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Moninkertaisten integraalien sovelluksia Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 217 Antti Rasila (Aalto-yliopisto)
Kinematiikka -1- K09A,B&C Harjoitustehtäviä Kevät 2010 PARTIKKELI. Suoraviivainen liike
 Kinematiikka -1- K09A,B&C Harjoitustehtäviä Kevät 010 PARTIKKELI Suoraviivainen liike 1. Suoraviivaisessa liikkeessä olevan partikkelin asema on (järjestelmä m, s) 3 x ( = t 15t + 36t 10. Laske a) partikkelin
Kinematiikka -1- K09A,B&C Harjoitustehtäviä Kevät 010 PARTIKKELI Suoraviivainen liike 1. Suoraviivaisessa liikkeessä olevan partikkelin asema on (järjestelmä m, s) 3 x ( = t 15t + 36t 10. Laske a) partikkelin
763306A JOHDATUS SUHTEELLISUUSTEORIAAN 2 Ratkaisut 2 Kevät 2017
 763306A JOHDATUS SUHTEELLISUUSTEORIAAN 2 Ratkaisut 2 Kevät 207. Nelinopeus ympyräliikkeessä On siis annettu kappaleen paikkaa kuvaava nelivektori X x µ : Nelinopeus U u µ on määritelty kaavalla x µ (ct,
763306A JOHDATUS SUHTEELLISUUSTEORIAAN 2 Ratkaisut 2 Kevät 207. Nelinopeus ympyräliikkeessä On siis annettu kappaleen paikkaa kuvaava nelivektori X x µ : Nelinopeus U u µ on määritelty kaavalla x µ (ct,
DYNAMIIKKA II, LUENTO 6 (SYKSY 2015) Arttu Polojärvi
 Arttu Polojärvi") DYNAMIIKKA II, LUENTO 6 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Mekaniikan peruslait (liikelait). Liikemäärän momentin tase. Kappaleen massan vaikutusmitat. Jäykän
DYNAMIIKKA II, LUENTO 6 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Mekaniikan peruslait (liikelait). Liikemäärän momentin tase. Kappaleen massan vaikutusmitat. Jäykän
Luento 13: Periodinen liike. Johdanto Harmoninen värähtely Esimerkkejä F t F r
 Luento 13: Periodinen liike Johdanto Harmoninen värähtely Esimerkkejä θ F t m g F r 1 / 27 Luennon sisältö Johdanto Harmoninen värähtely Esimerkkejä 2 / 27 Johdanto Tarkastellaan jaksollista liikettä (periodic
Luento 13: Periodinen liike Johdanto Harmoninen värähtely Esimerkkejä θ F t m g F r 1 / 27 Luennon sisältö Johdanto Harmoninen värähtely Esimerkkejä 2 / 27 Johdanto Tarkastellaan jaksollista liikettä (periodic
ELEC-A3110 Mekaniikka (5 op)
") Yliopistonlehtori, tkt Sami Kujala Syksy 2016 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia Ajankohtaista Presemokyselyn poimintoja Millä odotuksilla aloitat
Yliopistonlehtori, tkt Sami Kujala Syksy 2016 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia Ajankohtaista Presemokyselyn poimintoja Millä odotuksilla aloitat
Nopeus, kiihtyvyys ja liikemäärä Vektorit
 Nopeus, kiihtyvyys ja liikemäärä Vektorit Luento 2 https://geom.mathstat.helsinki.fi/moodle/course/view.php?id=360 Luennon tavoitteet: Vektorit tutuiksi Koordinaatiston valinta Vauhdin ja nopeuden ero
Nopeus, kiihtyvyys ja liikemäärä Vektorit Luento 2 https://geom.mathstat.helsinki.fi/moodle/course/view.php?id=360 Luennon tavoitteet: Vektorit tutuiksi Koordinaatiston valinta Vauhdin ja nopeuden ero
Tarkastellaan tilannetta, jossa kappale B on levossa ennen törmäystä: v B1x = 0:
 8.4 Elastiset törmäykset Liike-energia ja liikemäärä säilyvät elastisissa törmäyksissä Vain konservatiiviset voimat vaikuttavat 1D-tilanteessa kappaleiden A ja B törmäykselle: 1 2 m Av 2 A1x + 1 2 m Bv
8.4 Elastiset törmäykset Liike-energia ja liikemäärä säilyvät elastisissa törmäyksissä Vain konservatiiviset voimat vaikuttavat 1D-tilanteessa kappaleiden A ja B törmäykselle: 1 2 m Av 2 A1x + 1 2 m Bv
KALTEVA TASO. 1. Työn tavoitteet. 2. Teoria
 Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1. Työn tavoitteet Tämän työn ensimmäisessä osassa tutkit kuulan, sylinterin ja sylinterirenkaan vierimistä pitkin kaltevaa tasoa.
Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1. Työn tavoitteet Tämän työn ensimmäisessä osassa tutkit kuulan, sylinterin ja sylinterirenkaan vierimistä pitkin kaltevaa tasoa.
Nyt kerrataan! Lukion FYS5-kurssi
 Nyt kerrataan! Lukion FYS5-kurssi Vaakasuora heittoliike Heittoliikettä voidaan tarkastella erikseen vaaka- ja pystysuunnassa v=(v x,v y ) Jos ilmanvastausta ei oteta huomioon (yleensä ei), vaakasuunnalle
Nyt kerrataan! Lukion FYS5-kurssi Vaakasuora heittoliike Heittoliikettä voidaan tarkastella erikseen vaaka- ja pystysuunnassa v=(v x,v y ) Jos ilmanvastausta ei oteta huomioon (yleensä ei), vaakasuunnalle
Vedetään kiekkoa erisuuruisilla voimilla! havaitaan kiekon saaman kiihtyvyyden olevan suoraan verrannollinen käytetyn voiman suuruuteen
 4.3 Newtonin II laki Esim. jääkiekko märällä jäällä: pystysuuntaiset voimat kumoavat toisensa: jään kiekkoon kohdistama tukivoima n on yhtäsuuri, mutta vastakkaismerkkinen kuin kiekon paino w: n = w kitka
4.3 Newtonin II laki Esim. jääkiekko märällä jäällä: pystysuuntaiset voimat kumoavat toisensa: jään kiekkoon kohdistama tukivoima n on yhtäsuuri, mutta vastakkaismerkkinen kuin kiekon paino w: n = w kitka
Differentiaali- ja integraalilaskenta 3 Mallit 2 (alkuviikko) / Syksy 2016
 / Syksy 2016") MS-A35 Differentiaali- ja integraalilaskenta 3 Differentiaali- ja integraalilaskenta 3 Mallit 2 (alkuviikko) / Syksy 216 Tuntitehtävä 1: Laske sylinterikoordinaatteja käyttämällä sen kappaleen tilavuus,
MS-A35 Differentiaali- ja integraalilaskenta 3 Differentiaali- ja integraalilaskenta 3 Mallit 2 (alkuviikko) / Syksy 216 Tuntitehtävä 1: Laske sylinterikoordinaatteja käyttämällä sen kappaleen tilavuus,
ELEC-A3110 Mekaniikka (5 op)
") ELEC-A3110 Mekaniikka (5 op) Yliopistonlehtori, tkt Sami Kujala Elektroniikan ja nanotekniikan laitos (ELE) Syksy 2017 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia
ELEC-A3110 Mekaniikka (5 op) Yliopistonlehtori, tkt Sami Kujala Elektroniikan ja nanotekniikan laitos (ELE) Syksy 2017 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia
Luento 7: Voima ja Liikemäärä. Superpositio Newtonin lait Tasapainotehtävät Kitkatehtävät Ympyräliike Liikemäärä
 Luento 7: Voima ja Liikemäärä Superpositio Newtonin lait Tasapainotehtävät Kitkatehtävät Ympyräliike Liikemäärä 1 / 36 Johdanto Dynamiikka tutkii voimia ja niiden aiheuttamaa liikettä Newtonin liikelait
Luento 7: Voima ja Liikemäärä Superpositio Newtonin lait Tasapainotehtävät Kitkatehtävät Ympyräliike Liikemäärä 1 / 36 Johdanto Dynamiikka tutkii voimia ja niiden aiheuttamaa liikettä Newtonin liikelait
nopeammin. Havaitaan, että kussakin tapauksessa kuvaaja (t, ϕ)-koordinaatistossa on nouseva suora.
-koordinaatistossa on nouseva suora.") nopeammin. Havaitaan, että kussakin tapauksessa kuvaaja (t, ϕ)-koordinaatistossa on nouseva suora. Teimme mittaukset käyttäen Pascon pyörimisliikelaitteistoa (ME-895) ja Logger Promittausohjelmaa. Kuva
nopeammin. Havaitaan, että kussakin tapauksessa kuvaaja (t, ϕ)-koordinaatistossa on nouseva suora. Teimme mittaukset käyttäen Pascon pyörimisliikelaitteistoa (ME-895) ja Logger Promittausohjelmaa. Kuva
on radan suuntaiseen komponentti eli tangenttikomponentti ja on radan kaarevuuskeskipisteeseen osoittavaan komponentti. (ks. kuva 1).
.") H E I L U R I T 1) Matemaattinen heiluri = painottoman langan päässä heilahteleva massapiste (ks. kuva1) kuva 1. - heilurin pituus l - tasapainoasema O - ääriasemat A ja B - heilahduskulma - heilahdusaika
H E I L U R I T 1) Matemaattinen heiluri = painottoman langan päässä heilahteleva massapiste (ks. kuva1) kuva 1. - heilurin pituus l - tasapainoasema O - ääriasemat A ja B - heilahduskulma - heilahdusaika
Theory Finnish (Finland)
") Q1-1 Kaksi tehtävää mekaniikasta (10 pistettä) Lue yleisohjeet ennen tehtävien aloittamista. Osa A: Piilotettu kiekko (3,5 pistettä) Tässä tehtävässä käsitellään umpinaista puista sylinteriä, jonka säde
Q1-1 Kaksi tehtävää mekaniikasta (10 pistettä) Lue yleisohjeet ennen tehtävien aloittamista. Osa A: Piilotettu kiekko (3,5 pistettä) Tässä tehtävässä käsitellään umpinaista puista sylinteriä, jonka säde
DYNAMIIKKA II, LUENTO 2 (SYKSY 2015) Arttu Polojärvi
 Arttu Polojärvi") DYNAMIIKKA II, LUENTO 2 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertaus edelliseltä luennolta sekä ristituloista. Mekaniikan koordinaatistot: pallokoordinaatisto. Vakiovektorin muutosnopeus (kantavektorin
DYNAMIIKKA II, LUENTO 2 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertaus edelliseltä luennolta sekä ristituloista. Mekaniikan koordinaatistot: pallokoordinaatisto. Vakiovektorin muutosnopeus (kantavektorin
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 23.2.2016 Susanna Hurme Tervetuloa kurssille! Mitä on statiikka? Mitä on dynamiikka? Miksi niitä opiskellaan? Päivän aihe: Voiman käsite ja partikkelin tasapaino
KJR-C1001 Statiikka ja dynamiikka Luento 23.2.2016 Susanna Hurme Tervetuloa kurssille! Mitä on statiikka? Mitä on dynamiikka? Miksi niitä opiskellaan? Päivän aihe: Voiman käsite ja partikkelin tasapaino
Kvanttifysiikan perusteet 2017
 Kvanttifysiikan perusteet 207 Harjoitus 2: ratkaisut Tehtävä Osoita hyödyntäen Maxwellin yhtälöitä, että tyhjiössä magneettikenttä ja sähkökenttä toteuttavat aaltoyhtälön, missä aallon nopeus on v = c.
Kvanttifysiikan perusteet 207 Harjoitus 2: ratkaisut Tehtävä Osoita hyödyntäen Maxwellin yhtälöitä, että tyhjiössä magneettikenttä ja sähkökenttä toteuttavat aaltoyhtälön, missä aallon nopeus on v = c.
HARMONISEN VÄRÄHTELIJÄN JAKSONAIKA JA HEILURIEN HEILAHDUSAJAT - johtaminen 1) VAIMENEMATON HARMONINEN VÄRÄHDYSLIIKE
 VAIMENEMATON HARMONINEN VÄRÄHDYSLIIKE") HARMONISEN VÄRÄHTELIJÄN JAKSONAIKA JA HEILURIEN HEILAHDUSAJAT - johtaminen 1) VAIMENEMATON HARMONINEN VÄRÄHDYSLIIKE Harmoninen voima on voima, jonka suuruus on suoraan verrannollinen poikkeamaan tasapainoasemasta
HARMONISEN VÄRÄHTELIJÄN JAKSONAIKA JA HEILURIEN HEILAHDUSAJAT - johtaminen 1) VAIMENEMATON HARMONINEN VÄRÄHDYSLIIKE Harmoninen voima on voima, jonka suuruus on suoraan verrannollinen poikkeamaan tasapainoasemasta
4 Kaksi- ja kolmiulotteinen liike
 Mansfield and O Sullivan: Understandin physics, painos 1999, kpl 4. Näitä löytyy myös Youn and Freedman: University physics -teoksen luvuissa 4, osin myös luvuissa 3 ja 5. 4 Kaksi- ja kolmiulotteinen liike
Mansfield and O Sullivan: Understandin physics, painos 1999, kpl 4. Näitä löytyy myös Youn and Freedman: University physics -teoksen luvuissa 4, osin myös luvuissa 3 ja 5. 4 Kaksi- ja kolmiulotteinen liike
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 5: Kaarenpituus ja skalaarikentän viivaintegraali
 MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 5: Kaarenpituus ja skalaarikentän viivaintegraali Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2015 1 /
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 5: Kaarenpituus ja skalaarikentän viivaintegraali Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2015 1 /
Luvun 8 laskuesimerkit
 Luvun 8 laskuesimerkit Esimerkki 8.1 Heität pallon, jonka massa on 0.40 kg seinään. Pallo osuu seinään horisontaalisella nopeudella 30 m/s ja kimpoaa takaisin niin ikään horisontaalisesti nopeudella 20
Luvun 8 laskuesimerkit Esimerkki 8.1 Heität pallon, jonka massa on 0.40 kg seinään. Pallo osuu seinään horisontaalisella nopeudella 30 m/s ja kimpoaa takaisin niin ikään horisontaalisesti nopeudella 20
dl = F k dl. dw = F dl = F cos. Kun voima vaikuttaa kaarevalla polulla P 1 P 2, polku voidaan jakaa infinitesimaalisen pieniin siirtymiin dl
 Kun voima vaikuttaa kaarevalla polulla P 2, polku voidaan jakaa infinitesimaalisen pieniin siirtymiin dl Kukin siirtymä dl voidaan approksimoida suoraviivaiseksi, jolloin vastaava työn elementti voidaan
Kun voima vaikuttaa kaarevalla polulla P 2, polku voidaan jakaa infinitesimaalisen pieniin siirtymiin dl Kukin siirtymä dl voidaan approksimoida suoraviivaiseksi, jolloin vastaava työn elementti voidaan
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 7: Pintaintegraali ja vuointegraali
 MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 7: Pintaintegraali ja vuointegraali Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2015 1 / 24 Mikä on pinta?
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 7: Pintaintegraali ja vuointegraali Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2015 1 / 24 Mikä on pinta?
Luento 10: Työ, energia ja teho
 Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho Ajankohtaista Konseptitesti 1 Kysymys Ajat pyörällä ylös jyrkkää mäkeä. Huipulle vie kaksi polkua, toinen kaksi kertaa pidempi kuin
Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho Ajankohtaista Konseptitesti 1 Kysymys Ajat pyörällä ylös jyrkkää mäkeä. Huipulle vie kaksi polkua, toinen kaksi kertaa pidempi kuin
5.9 Voiman momentti (moment of force, torque)
") 5.9 Voiman momentti (moment of force, torque) Voiman momentti määritellään ristitulona M = r F missä r on voiman F vaikutuspisteen paikkavektori tarkasteltavan pisteen suhteen Usean voiman tapauksessa
5.9 Voiman momentti (moment of force, torque) Voiman momentti määritellään ristitulona M = r F missä r on voiman F vaikutuspisteen paikkavektori tarkasteltavan pisteen suhteen Usean voiman tapauksessa
Perusopintojen Laboratoriotöiden Työselostus 1
 Perusopintojen Laboratoriotöiden Työselostus 1 Kalle Hyvönen Työ tehty 1. joulukuuta 008, Palautettu 30. tammikuuta 009 1 Assistentti: Mika Torkkeli Tiivistelmä Laboratoriossa tehdyssä ensimmäisessä kokeessa
Perusopintojen Laboratoriotöiden Työselostus 1 Kalle Hyvönen Työ tehty 1. joulukuuta 008, Palautettu 30. tammikuuta 009 1 Assistentti: Mika Torkkeli Tiivistelmä Laboratoriossa tehdyssä ensimmäisessä kokeessa
Monissa fysiikan probleemissa vaikuttavien voimien yksityiskohtia ei tunneta
 8 LIIKEMÄÄRÄ, IMPULSSI JA TÖRMÄYKSET Monissa fysiikan probleemissa vaikuttavien voimien yksityiskohtia ei tunneta Tällöin dynamiikan peruslain F = ma käyttäminen ei ole helppoa tai edes mahdollista Newtonin
8 LIIKEMÄÄRÄ, IMPULSSI JA TÖRMÄYKSET Monissa fysiikan probleemissa vaikuttavien voimien yksityiskohtia ei tunneta Tällöin dynamiikan peruslain F = ma käyttäminen ei ole helppoa tai edes mahdollista Newtonin
Tekijä Pitkä matematiikka
 K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
Ei-inertiaaliset koordinaatistot
 orstai 25.9.2014 1/17 Ei-inertiaaliset koordinaatistot Tarkastellaan seuraavaa koordinaatistomuunnosta: {x} = (x 1, x 2, x 3 ) {y} = (y 1, y 2, y 3 ) joille valitaan kantavektorit: {x} : (î, ĵ, ˆk) {y}
orstai 25.9.2014 1/17 Ei-inertiaaliset koordinaatistot Tarkastellaan seuraavaa koordinaatistomuunnosta: {x} = (x 1, x 2, x 3 ) {y} = (y 1, y 2, y 3 ) joille valitaan kantavektorit: {x} : (î, ĵ, ˆk) {y}
PAINOPISTE JA MASSAKESKIPISTE
 PAINOPISTE JA MASSAKESKIPISTE Kappaleen painopiste on piste, jonka kautta kappaleeseen kohdistuvan painovoiman vaikutussuora aina kulkee, olipa kappale missä asennossa tahansa. Jos ajatellaan kappaleen
PAINOPISTE JA MASSAKESKIPISTE Kappaleen painopiste on piste, jonka kautta kappaleeseen kohdistuvan painovoiman vaikutussuora aina kulkee, olipa kappale missä asennossa tahansa. Jos ajatellaan kappaleen
3.4 Liike-energiasta ja potentiaalienergiasta
 Työperiaatteeksi (the work-energy theorem) kutsutaan sitä että suljetun systeemin liike-energian muutos Δ on voiman systeemille tekemä työ W Tämä on yksi konservatiivisen voiman erityistapaus Työperiaate
Työperiaatteeksi (the work-energy theorem) kutsutaan sitä että suljetun systeemin liike-energian muutos Δ on voiman systeemille tekemä työ W Tämä on yksi konservatiivisen voiman erityistapaus Työperiaate
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 17.3.2016 Susanna Hurme Päivän aihe: Energian, työn ja tehon käsitteet sekä energiaperiaate (Kirjan luku 14) Osaamistavoitteet: Osata tarkastella partikkelin kinetiikkaa
KJR-C1001 Statiikka ja dynamiikka Luento 17.3.2016 Susanna Hurme Päivän aihe: Energian, työn ja tehon käsitteet sekä energiaperiaate (Kirjan luku 14) Osaamistavoitteet: Osata tarkastella partikkelin kinetiikkaa
Mekaniikan jatkokurssi Fys102
 Mekaniikan jatkokurssi Fys102 Kevät 2010 Jukka Maalampi LUENTO 6 Yksinkertainen harmoninen liike yhteys ympyräliikkeeseen energia dynamiikka Värähdysliike Knight Ch 14 Heilahtelut pystysuunnassa ja gravitaation
Mekaniikan jatkokurssi Fys102 Kevät 2010 Jukka Maalampi LUENTO 6 Yksinkertainen harmoninen liike yhteys ympyräliikkeeseen energia dynamiikka Värähdysliike Knight Ch 14 Heilahtelut pystysuunnassa ja gravitaation
Luento 5: Voima ja Liikemäärä
 Luento 5: Voima ja Liikemäärä Superpositio Newtonin lait Tasapainotehtävät Kitkatehtävät Ympyräliike Liikemäärä Johdanto Dynamiikka tutkii voimia ja niiden aiheuttamaa liikettä Newtonin liikelait (Newton
Luento 5: Voima ja Liikemäärä Superpositio Newtonin lait Tasapainotehtävät Kitkatehtävät Ympyräliike Liikemäärä Johdanto Dynamiikka tutkii voimia ja niiden aiheuttamaa liikettä Newtonin liikelait (Newton
Kertaus. Integraalifunktio ja integrointi. 2( x 1) 1 2x. 3( x 1) 1 (3x 1) KERTAUSTEHTÄVIÄ. K1. a)
 1 2x. 3( x 1) 1 (3x 1) KERTAUSTEHTÄVIÄ. K1. a)") Juuri 9 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 5.5.6 Kertaus Integraalifunktio ja integrointi KERTAUSTEHTÄVIÄ K. a) ( )d C C b) c) d e e C cosd cosd sin C K. Funktiot F ja F ovat saman
Juuri 9 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 5.5.6 Kertaus Integraalifunktio ja integrointi KERTAUSTEHTÄVIÄ K. a) ( )d C C b) c) d e e C cosd cosd sin C K. Funktiot F ja F ovat saman
8 Suhteellinen liike (Relative motion)
") 8 Suhteellinen liike (Relative motion) 8.1 Inertiaalikoordinaatistot (Inertial reference of frames) Newtonin I laki on II lain erikoistapaus. Jos kappaleeseen ei vaikuta ulkoisia voimia, ei kappaleen liikemäärä
8 Suhteellinen liike (Relative motion) 8.1 Inertiaalikoordinaatistot (Inertial reference of frames) Newtonin I laki on II lain erikoistapaus. Jos kappaleeseen ei vaikuta ulkoisia voimia, ei kappaleen liikemäärä
Luento 6: Liikemäärä ja impulssi
 Luento 6: Liikemäärä ja impulssi Liikemäärä ja impulssi Liikemäärän säilyminen Massakeskipiste Muuttuva massa Laskettuja esimerkkejä Luennon sisältö Liikemäärä ja impulssi Liikemäärän säilyminen Massakeskipiste
Luento 6: Liikemäärä ja impulssi Liikemäärä ja impulssi Liikemäärän säilyminen Massakeskipiste Muuttuva massa Laskettuja esimerkkejä Luennon sisältö Liikemäärä ja impulssi Liikemäärän säilyminen Massakeskipiste
Luento 2: Liikkeen kuvausta
 Luento 2: Liikkeen kuvausta Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Luennon sisältö Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Liikkeen ratkaisu kiihtyvyydestä
Luento 2: Liikkeen kuvausta Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Luennon sisältö Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Liikkeen ratkaisu kiihtyvyydestä
BM30A0240, Fysiikka L osa 4
 BM30A0240, Fysiikka L osa 4 Luennot: Heikki Pitkänen 1 Oppikirja: Young & Freedman: University Physics Luku 14 - Periodic motion Luku 15 - Mechanical waves Luku 16 - Sound and hearing Muuta - Diffraktio,
BM30A0240, Fysiikka L osa 4 Luennot: Heikki Pitkänen 1 Oppikirja: Young & Freedman: University Physics Luku 14 - Periodic motion Luku 15 - Mechanical waves Luku 16 - Sound and hearing Muuta - Diffraktio,
Luento 11: Periodinen liike
 Luento 11: Periodinen liike Johdanto Harmoninen värähtely Esimerkkejä Laskettuja esimerkkejä ~F t m~g ~F r Konseptitesti 1 Tehtävänanto Kuvassa on jouseen kytketyn massan sijainti ajan funktiona. Kuvaile
Luento 11: Periodinen liike Johdanto Harmoninen värähtely Esimerkkejä Laskettuja esimerkkejä ~F t m~g ~F r Konseptitesti 1 Tehtävänanto Kuvassa on jouseen kytketyn massan sijainti ajan funktiona. Kuvaile
L a = L l. rv a = Rv l v l = r R v a = v a 1, 5
 Tehtävä a) Energia ja rataliikemäärämomentti säilyy. Maa on r = AU päässä auringosta. Mars on auringosta keskimäärin R =, 5AU päässä. Merkitään luotaimen massaa m(vaikka kuten tullaan huomaamaan sitä ei
Tehtävä a) Energia ja rataliikemäärämomentti säilyy. Maa on r = AU päässä auringosta. Mars on auringosta keskimäärin R =, 5AU päässä. Merkitään luotaimen massaa m(vaikka kuten tullaan huomaamaan sitä ei
Luento 10: Keskeisvoimat ja gravitaatio
 Luento 10: Keskeisvoimat ja gravitaatio Gravitaatio Liike keskeisvoimakentässä Keplerin lait Laskettuja esimerkkejä Luennon sisältö Gravitaatio Liike keskeisvoimakentässä Keplerin lait Laskettuja esimerkkejä
Luento 10: Keskeisvoimat ja gravitaatio Gravitaatio Liike keskeisvoimakentässä Keplerin lait Laskettuja esimerkkejä Luennon sisältö Gravitaatio Liike keskeisvoimakentässä Keplerin lait Laskettuja esimerkkejä
Luento 8: Liikemäärä ja impulssi. Liikemäärä ja impulssi Liikemäärän säilyminen Massakeskipiste Muuttuva massa Harjoituksia ja esimerkkejä
 Luento 8: Liikemäärä ja impulssi Liikemäärä ja impulssi Liikemäärän säilyminen Massakeskipiste Muuttuva massa Harjoituksia ja esimerkkejä 1 / 46 Luennon sisältö Liikemäärä ja impulssi Liikemäärän säilyminen
Luento 8: Liikemäärä ja impulssi Liikemäärä ja impulssi Liikemäärän säilyminen Massakeskipiste Muuttuva massa Harjoituksia ja esimerkkejä 1 / 46 Luennon sisältö Liikemäärä ja impulssi Liikemäärän säilyminen
Luento 11: Periodinen liike
 Luento 11: Periodinen liike Johdanto Harmoninen värähtely Esimerkkejä Laskettuja esimerkkejä θ F t m g F r Luennon sisältö Johdanto Harmoninen värähtely Esimerkkejä Laskettuja esimerkkejä Johdanto Tarkastellaan
Luento 11: Periodinen liike Johdanto Harmoninen värähtely Esimerkkejä Laskettuja esimerkkejä θ F t m g F r Luennon sisältö Johdanto Harmoninen värähtely Esimerkkejä Laskettuja esimerkkejä Johdanto Tarkastellaan
y 2 h 2), (a) Näytä, että virtauksessa olevan fluidialkion tilavuus ei muutu.
, (a) Näytä, että virtauksessa olevan fluidialkion tilavuus ei muutu.") Tehtävä 1 Tarkastellaan paineen ajamaa Poisseuille-virtausta kahden yhdensuuntaisen levyn välissä Levyjen välinen etäisyys on 2h Nopeusjakauma raossa on tällöin u(y) = 1 dp ( y 2 h 2), missä y = 0 on raon
Tehtävä 1 Tarkastellaan paineen ajamaa Poisseuille-virtausta kahden yhdensuuntaisen levyn välissä Levyjen välinen etäisyys on 2h Nopeusjakauma raossa on tällöin u(y) = 1 dp ( y 2 h 2), missä y = 0 on raon
HARMONISEN VÄRÄHTELIJÄN JAKSONAIKA JA HEILURIEN HEILAHDUSAJAT - johtaminen 1) VAIMENEMATON HARMONINEN VÄRÄHDYSLIIKE
 VAIMENEMATON HARMONINEN VÄRÄHDYSLIIKE") HARMONISEN VÄRÄHTELIJÄN JAKSONAIKA JA HEILURIEN HEILAHDUSAJAT - johtaminen 1) VAIMENEMATON HARMONINEN VÄRÄHDYSLIIKE Harmoninen voima on voima, jonka suuruus on suoraan verrannollinen poikkeamaan tasapainoasemasta
HARMONISEN VÄRÄHTELIJÄN JAKSONAIKA JA HEILURIEN HEILAHDUSAJAT - johtaminen 1) VAIMENEMATON HARMONINEN VÄRÄHDYSLIIKE Harmoninen voima on voima, jonka suuruus on suoraan verrannollinen poikkeamaan tasapainoasemasta
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 1.3.2016 Susanna Hurme Päivän aihe: Jäykän kappaleen tasapaino ja vapaakappalekuva (Kirjan luvut 5.1-5.4) Osaamistavoitteet: 1. Ymmärtää, mitä tukireaktiot ovat
KJR-C1001 Statiikka ja dynamiikka Luento 1.3.2016 Susanna Hurme Päivän aihe: Jäykän kappaleen tasapaino ja vapaakappalekuva (Kirjan luvut 5.1-5.4) Osaamistavoitteet: 1. Ymmärtää, mitä tukireaktiot ovat
Luento 12: Keskeisvoimat ja gravitaatio. Gravitaatio Liike keskeisvoimakentässä Keplerin lait Laskettuja esimerkkejä
 Luento 12: Keskeisvoimat ja gravitaatio Gravitaatio Liike keskeisvoimakentässä Keplerin lait Laskettuja esimerkkejä 1 / 46 Luennon sisältö Gravitaatio Liike keskeisvoimakentässä Keplerin lait Laskettuja
Luento 12: Keskeisvoimat ja gravitaatio Gravitaatio Liike keskeisvoimakentässä Keplerin lait Laskettuja esimerkkejä 1 / 46 Luennon sisältö Gravitaatio Liike keskeisvoimakentässä Keplerin lait Laskettuja
HARJOITUS 4 1. (E 5.29):
:") HARJOITUS 4 1. (E 5.29): Työkalulaatikko, jonka massa on 45,0 kg, on levossa vaakasuoralla lattialla. Kohdistat laatikkoon asteittain kasvavan vaakasuoran työntövoiman ja havaitset, että laatikko alkaa
HARJOITUS 4 1. (E 5.29): Työkalulaatikko, jonka massa on 45,0 kg, on levossa vaakasuoralla lattialla. Kohdistat laatikkoon asteittain kasvavan vaakasuoran työntövoiman ja havaitset, että laatikko alkaa
infoa Viikon aiheet Potenssisarja a n = c n (x x 0 ) n < 1
 n < 1") infoa Viikon aiheet Tentti ensi viikolla ma 23.0. klo 9.00-3.00 Huomaa, alkaa tasalta! D0 (Sukunimet A-) E204 (Sukunimet S-Ö) Mukaan kynä ja kumi. Ei muuta materiaalia. Tentissä kaavakokoelma valmiina.
infoa Viikon aiheet Tentti ensi viikolla ma 23.0. klo 9.00-3.00 Huomaa, alkaa tasalta! D0 (Sukunimet A-) E204 (Sukunimet S-Ö) Mukaan kynä ja kumi. Ei muuta materiaalia. Tentissä kaavakokoelma valmiina.
x (t) = 2t ja y (t) = 3t 2 x (t) + + y (t) Lasketaan pari käyrän arvoa ja hahmotellaan kuvaaja: A 2 A 1
 = 2t ja y (t) = 3t 2 x (t) + + y (t) Lasketaan pari käyrän arvoa ja hahmotellaan kuvaaja: A 2 A 1") BM2A582 Integraalilaskenta ja sovellukset Harjoitus 6, Kevät 26 Kaikissa tehtävissä tärkeintä ja riittävää on saada oikea lauseke aikaiseksi. Useissa tehtävissä integraalit eivät tosin ole niin vaikeita
BM2A582 Integraalilaskenta ja sovellukset Harjoitus 6, Kevät 26 Kaikissa tehtävissä tärkeintä ja riittävää on saada oikea lauseke aikaiseksi. Useissa tehtävissä integraalit eivät tosin ole niin vaikeita
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 9: Muuttujanvaihto taso- ja avaruusintegraaleissa
 Luento 9: Muuttujanvaihto taso- ja avaruusintegraaleissa") MS-A24 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 9: Muuttujanvaihto taso- ja avaruusintegraaleissa Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 216 Antti Rasila
MS-A24 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 9: Muuttujanvaihto taso- ja avaruusintegraaleissa Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 216 Antti Rasila
Suhteellinen nopeus. Matkustaja P kävelee nopeudella 1.0 m/s pitkin 3.0 m/s nopeudella etenevän junan B käytävää
 3.5 Suhteellinen nopeus Matkustaja P kävelee nopeudella 1.0 m/s pitkin 3.0 m/s nopeudella etenevän junan B käytävää P:n nopeus junassa istuvan toisen matkustajan suhteen on v P/B-x = 1.0 m/s Intuitio :
3.5 Suhteellinen nopeus Matkustaja P kävelee nopeudella 1.0 m/s pitkin 3.0 m/s nopeudella etenevän junan B käytävää P:n nopeus junassa istuvan toisen matkustajan suhteen on v P/B-x = 1.0 m/s Intuitio :
Luvun 5 laskuesimerkit
 Luvun 5 laskuesimerkit Esimerkki 5.1 Moottori roikkuu oheisen kuvan mukaisessa ripustuksessa. a) Mitkä ovat kahleiden jännitykset? b) Mikä kahleista uhkaa katketa ensimmäisenä? Piirretäänpä parit vapaakappalekuvat.
Luvun 5 laskuesimerkit Esimerkki 5.1 Moottori roikkuu oheisen kuvan mukaisessa ripustuksessa. a) Mitkä ovat kahleiden jännitykset? b) Mikä kahleista uhkaa katketa ensimmäisenä? Piirretäänpä parit vapaakappalekuvat.
Luku 8. Mekaanisen energian säilyminen. Konservatiiviset ja eikonservatiiviset. Potentiaalienergia Voima ja potentiaalienergia.
 Luku 8 Mekaanisen energian säilyminen Konservatiiviset ja eikonservatiiviset voimat Potentiaalienergia Voima ja potentiaalienergia Mekaanisen energian säilyminen Teho Tavoitteet: Erottaa konservatiivinen
Luku 8 Mekaanisen energian säilyminen Konservatiiviset ja eikonservatiiviset voimat Potentiaalienergia Voima ja potentiaalienergia Mekaanisen energian säilyminen Teho Tavoitteet: Erottaa konservatiivinen
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Parametrisoidut käyrät ja kaarenpituus
 Luento 1: Parametrisoidut käyrät ja kaarenpituus") MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Parametrisoidut käyrät ja kaarenpituus Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0202 Syksy 2015 1 / 18
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 1: Parametrisoidut käyrät ja kaarenpituus Antti Rasila Aalto-yliopisto Syksy 2015 Antti Rasila (Aalto-yliopisto) MS-A0202 Syksy 2015 1 / 18