SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
|
|
|
- Siiri Turunen
- 6 vuotta sitten
- Katselukertoja:
Transkriptio

1 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka Oulun yliopisto Älykkäät koneet ja järjestelmät / systeemitekniikka Jan 019
2 ENSO IKONEN PYOSYS Oppimistavoitteet Opiskelija... näkee kuinka siirtofunktiot voi aina esittää reaalisten tai imaginääristen napojen, nollien ja vahvistuksen avulla. huomaa yhteyden aikatason käyttäytymisen/ suorituskyvyn ja napojen sijainnin välillä. ymmärtää vahvistusten ja nollien merkityksen napaanalyysissä. osaa lukea siirtofunktioiden kuvaamien järjestelmien perusominaisuuksia suoraan siirtofunktiosta (vahvistus, aikavakio, ominaistaajuus/ vaimennus). osaa laskea approksimatiivisesti haluttua käyttäytymistä vastaavat napojen paikat. perehtyy Simulinkin käyttöön, ja kykenee tarkistamaan järjestelmän vasteen Matlab-simuloinnein.
3 ENSO IKONEN PYOSYS 3 Säätöjärjestelmien suunnittelu SäSu 019. Siirtofunktiot (h).3 Siirtofunktiot prosessien malleina (1h).4 Matlab ltijärjestelmien analyysissä.5 Matlab Simulink (harjoituksissa). Siirtofunktiot standardivasteet 1. ja. kertaluvun systeemeille toisen kertaluvun systeemin vaste vs. navat esimerkkejä harjoituksia
4 . Siirtofunktiot ENSO IKONEN PYOSYS 4
5 ENSO IKONEN PYOSYS 5 Navat, nollat ja vahvistus Muistetaan, että G s k s num s den m b0s a s s z 1 s z s zm s p s p s p 1 missä p i ovat systeemin navat sisäiset kytkennät z i ovat systeemin nollat kytkennät ympäristöön k on systeemin vahvistus 0 n b 1 n m Napoihin perustuva luokittelu ensimmäisen kertaluvun: Ys k U s s 1 toisen kertaluvun systeemit: korkeamman kertaluvun systeemit
6 ..1 Standardivasteita impulssi, askel, tp-vahvistus
7 Ensimmäisen kertaluvun systeemi

8 ENSO IKONEN PYOSYS 8 Ensimmäisen kertaluvun systeemi impulssi- ja askelvasteet first order system responses 1.8 step reseponse % Y U s k s s 1 k=, =5 gain kτ ττtime constant impulse reseponse

9 ENSO IKONEN PYOSYS 9 Toisen kertaluvun systeemit vakioreferenssi Toisen kertaluvun systeemillä voi olla kaksi reaalista napaa Ys k U s s s kompleksinen napapari Y U s s n vaimennussuhde n s k s n luonnollinen taajuus n s s s 1, 1, s n n n n n 0 n 1 kompleksinen jos <1 4 n
10 ENSO IKONEN PYOSYS 10 Navat vs aikatason vasteet nollaton toisen kertaluvun systeemi ja sen impulssivaste navat : s i 1, negatiivinen reaaliosa stabiili systeemi imaginääriosa värähtelevä systeemi täysin vaimennettu systeemi imaginäärinavat ovat kompleksikonjugaatteja (symmetria reaaliakselin suhteen) positiivinen reaaliosa epästabiili systeemi systeemin vasteen voi suunnitella asettelemalla sen napoja käyttäen säätimiä myös nollat muokkaavat systeemin dynaamista käyttäytymistä
11 Toisen kertaluvun systeemit

12 Toisen kertaluvun systeemit

13 Polaari- vs karteesinen esitys ENSO IKONEN PYOSYS 13
14 ENSO IKONEN PYOSYS 14 Harjoitus polaari vs karteesinen esitys Osoita, että muunnoskaavat pätevät. d n n d d 1 1 : n potenssien kertoimet samoiksi : merkitään ja Kirjoitetaan karteesinen muoto auki s s s s n n d ' : Merkitään siirtofunktiot samoiksi s s k s k. 1 n n n n d n
15 ENSO IKONEN PYOSYS 15 Navat vs aikatason vasteet nollaton toisen kertaluvun systeemi ja sen askelvaste imaginääriosa värähtelevä systeemi täysin vaimennettu systeemi systeemin vasteen voi suunnitella asettelemalla sen napoja käyttäen säätimiä
16 ENSO IKONEN PYOSYS 16 Napa-nolla-kuvaaja Matlab: pzmap, sgrid navat : Y U 1, i s k' s s i s i s k' d s s k d s vaimennussuhde d n n luonnollinen taajuus (vaimentamaton) n d Imaginary Axis (seconds -1 ) Pole-Zero Map , n 1.5, k Real Axis (seconds -1 ) Y s k U s s s s.4s.5 s n.4s.5 n s is i

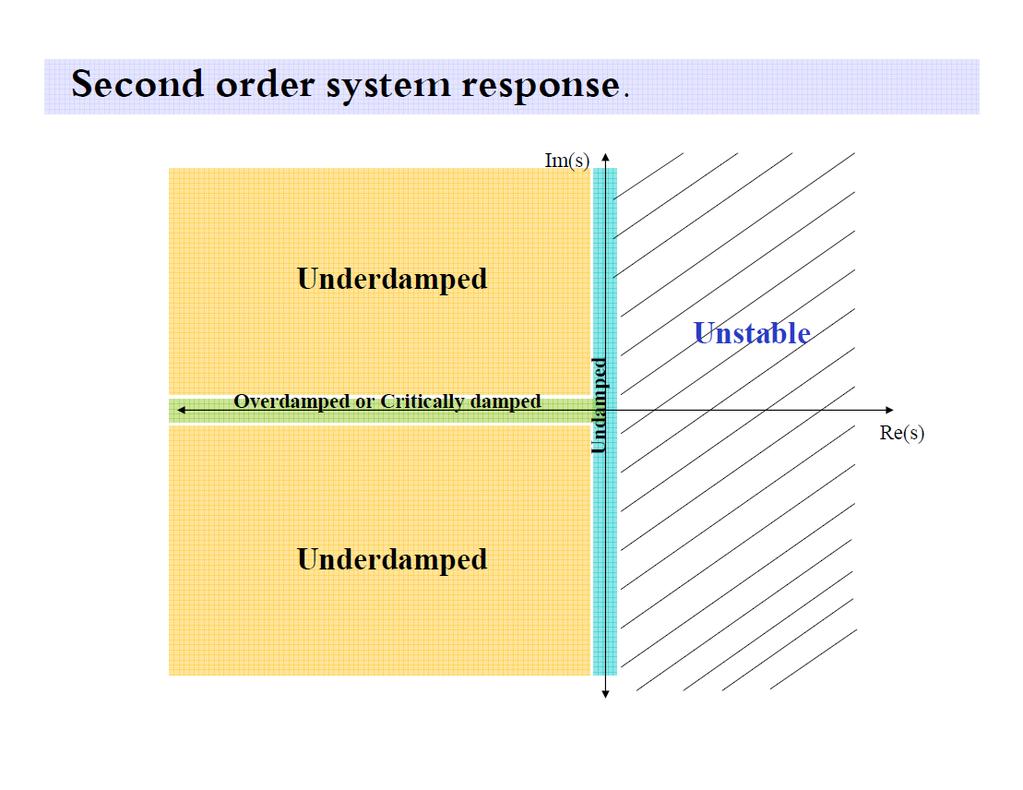
17 ENSO IKONEN PYOSYS 17 Toisen kertaluvun systeemin vaste Napojen sijaintialueet: TÄYSIN VAIMENNETTU KRIITTISESTI VAIMENNETTU ALIVAIMENNETTU VAIMENTAMATON EPÄSTABIILI Im (0,0) Re Esimerkkejä: täysin vaimennettu alivaimennettu ja vaimentamaton ω d kasvaa, vakio σ σ kasvaa, vakio ω d ω n kasvaa, vakio ζ ζ kasvaa, vakio ω n värähtelyn taajuus, vasteen nopeus, vaimennus aikatason speksit Lähde: me451/jchoi/007/handouts/me4 51_S07_lecture17.pdf SKIP
18

19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
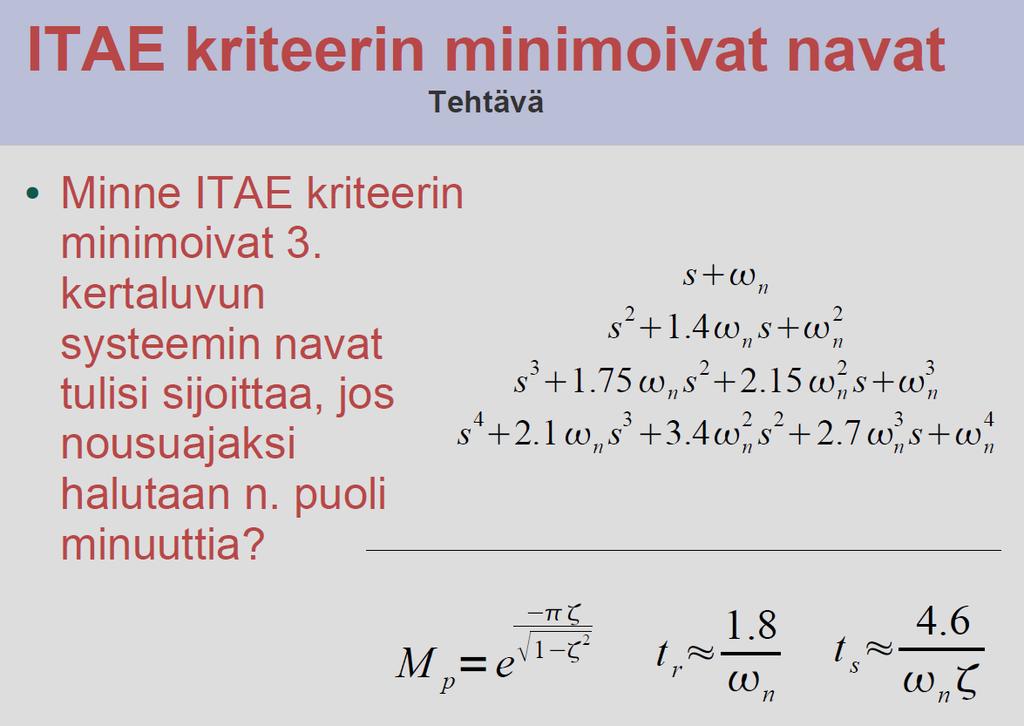
41 ENSO IKONEN PYOSYS 41 Harjoitus (5min) Prosessia kuvaa: w G(s) = s(s+w n z) ( w n luonnollinen taajuus, z vaimennussuhde) Ohje: Muodosta suljetun piirin siirtofunktio. Näytä, että P-säädöllä takaisinkytketty suljettu järjestelmä on toisen kertaluvun prosessi.

42 P-säädöllä takaisinkytketty järjestelmä: Ratkaisu ENSO IKONEN PYOSYS 4
43 ENSO IKONEN PYOSYS 43 Harjoitus (N.18) (10+10min) Ratkaise f(t) differentiaaliyhtälöstä f (t)-5f (t)+6f = exp(t)1(t) kun alkuarvot ovat nollia; f (0)=f (0)=0. Ohje: Laplace-muunna, tee F(s):lle osamurtohajotelma ja muodosta aikatason vaste f(t). Tarkista tulos Matlabilla Ratkaise osamurron parametrit: inv-komennolla, ja simuloi: for.., y(t)=.., end Simuloi: impulsekomennolla ja vertaa edelliseen Tarkasta osamurto: residue

44 ENSO IKONEN PYOSYS 44 N.18 ratkaisu
45 N.18 yhtälöryhmän ratkaisu ENSO IKONEN PYOSYS 45
46 N.18 tuloksen tarkistus ENSO IKONEN PYOSYS 46
47 ENSO IKONEN PYOSYS 47 N.18 osamurto Matlabia käyttäen

48 ENSO IKONEN PYOSYS 48 Aikatason vasteet ylitys, nousuaika, asettumisaika SKIP
49
50 Harjoituksia 1 systeemin käyttäytyminen taajuustasossa vs. navat >> num=1 >> den = [1 0.46] >> G = tf(num,den) >> impulse(g)
51 Harjoituksia systeemin käyttäytyminen aikatasossa vs. navat
 >> G = tf(num,den); >> step(g) >> %on Fig.")
52 Harjoituksia 3 systeemin navat vs. käyttäytyminen >> num = 1 >> den=conv([1 0.5-i],[1 0.5+i]) >> G = tf(num,den); >> step(g) >> %on Fig., right-click Characteristics

53 Harjoitus (5min) ENSO IKONEN PYOSYS 53

54 ENSO IKONEN PYOSYS 54

55 ENSO IKONEN PYOSYS 55
56 Optimipolynomit
57
58
59 .3 Siirtofunktiot prosessimalleina viivetermi mukana

60 .3 Siirtofunktiot prosessimalleina viivetermi mukana
61 *Puolityssääntö matalan kertaluvun approksimaatit
 ( ) ( s s s ds df e s ds df s f e s f s s s s 0 ) ( ) ( 1 ) ( 0 0")
62 *Puolitussääntö Taylorin approksimointi x x x dx df x f x f x x x x ) ( ) ( s s s ds df e s ds df s f e s f s s s s 0 ) ( ) ( 1 ) ( 0 0
63 *Puolitussääntö Tehollinen viive & aikavakio(t)
64 *Puolitussääntö Tehollinen viive & aikavakio(t)

65 Harjoitus puolitussääntö 1. Kirjoitetaan siirtofunktio aikavakio - muotoon "Huomataan"että s -1on yksi napa (s 1) s s. Aikavakio 3 8s 17s 10 7s 10 s ja s s e Gs suurin aikavakio 1. kertaluvun approksimaatio 0.95s 1 e Gs 1.5s 1. kertaluvun approksimaatio G s 1 s 1 s 1 puolet toiseksi suurimmasta, 0.5 loput viiveeseen s 1 e 0.6s s 1 0.6s 1
66 Harjoitus puolitussääntö - askelvaste G s s e s 1 s 1 s 1 1. kertaluvun approksimaatio G s 1 1 e 1.5s s. kertaluvun approksimaatio G s e 0.6s s 1 0.6s 1
67 ENSO IKONEN PYOSYS 67 Oppimistavoitteet Opiskelija... näkee kuinka siirtofunktiot voi aina esittää reaalisten tai imaginääristen napojen, nollien ja vahvistuksen avulla. huomaa yhteyden aikatason käyttäytymisen/ suorituskyvyn ja napojen sijainnin välillä. ymmärtää vahvistusten ja nollien merkityksen napaanalyysissä. osaa lukea siirtofunktioiden kuvaamien järjestelmien perusominaisuuksia suoraan siirtofunktiosta (vahvistus, aikavakio, ominaistaajuus/ vaimennus). osaa laskea approksimatiivisesti haluttua käyttäytymistä vastaavat napojen paikat. perehtyy Simulinkin käyttöön, ja kykenee tarkistamaan järjestelmän vasteen Matlab-simuloinnein.
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Systeemitekniikan laboratorio Jan 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Systeemitekniikan laboratorio Jan 2019
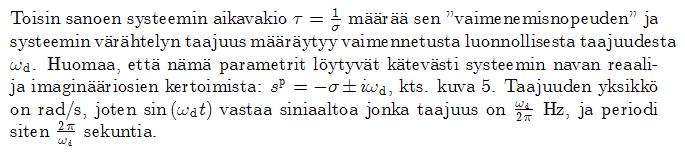
Aikatason vaste vs. siirtofunktio Tehtävä
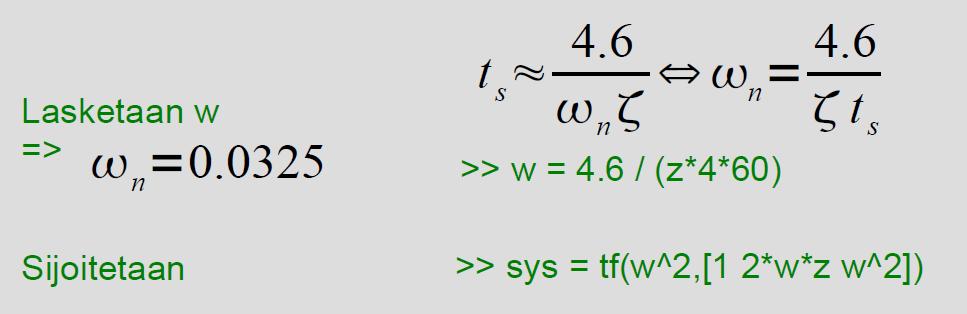
 Aikatason vaste vs. siirtofunktio Tehtävä Millainen toisen kertaluvun siirtofunktio vastaa systeemiä jonka ylitys on 10% ja asettumisaika 4 min? Y s X s = 2 n s 2 2 2 n s n M p =e t r 1.8 n t s 4.6 n 1
Aikatason vaste vs. siirtofunktio Tehtävä Millainen toisen kertaluvun siirtofunktio vastaa systeemiä jonka ylitys on 10% ja asettumisaika 4 min? Y s X s = 2 n s 2 2 2 n s n M p =e t r 1.8 n t s 4.6 n 1
Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C (s+1)(s+0.02) 50s+1
 Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C (s+1)(s+0.02) 50s+1") ENSO IKONEN PYOSYS Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C. 1 P(s) = -----------------(s+1)(s+0.02) C(s) = 50s+1 --------50s Piirrä vasteet asetusarvosta. Kommentoi
ENSO IKONEN PYOSYS Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C. 1 P(s) = -----------------(s+1)(s+0.02) C(s) = 50s+1 --------50s Piirrä vasteet asetusarvosta. Kommentoi
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät, Systeemitekniikka Feb 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät, Systeemitekniikka Feb 2019
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät helmikuu 2019 ENSO IKONEN PYOSYS
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät helmikuu 2019 ENSO IKONEN PYOSYS
MATLAB harjoituksia RST-säädöstä (5h)
") Digitaalinen säätöteoria MATLAB harjoituksia RST-säädöstä (5h) Enso Ikonen Oulun yliopisto, systeemitekniikan laboratorio November 25, 2008 Harjoituskerran sisältö kertausta (15 min) Napojensijoittelu
Digitaalinen säätöteoria MATLAB harjoituksia RST-säädöstä (5h) Enso Ikonen Oulun yliopisto, systeemitekniikan laboratorio November 25, 2008 Harjoituskerran sisältö kertausta (15 min) Napojensijoittelu
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / Systeemitekniikka Jan 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / Systeemitekniikka Jan 2019
3. kierros. 2. Lähipäivä
 3. kierros. Lähipäivä Viikon aihe (viikko /) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
3. kierros. Lähipäivä Viikon aihe (viikko /) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
H(s) + + _. Ymit(s) Laplace-tason esitykseksi on saatu (katso jälleen kalvot):
 + + _. Ymit(s) Laplace-tason esitykseksi on saatu (katso jälleen kalvot):") ELEC-C3 Säätötekniikka 5. laskuharjoitus Vastaukset Quiz: Luennon 4 luentokalvojen (luku 4) lopussa on esimerkki: Sähköpiiri (alkaa kalvon 39 tienoilla). Lue esimerkki huolellisesti ja vastaa seuraavaan:
ELEC-C3 Säätötekniikka 5. laskuharjoitus Vastaukset Quiz: Luennon 4 luentokalvojen (luku 4) lopussa on esimerkki: Sähköpiiri (alkaa kalvon 39 tienoilla). Lue esimerkki huolellisesti ja vastaa seuraavaan:
SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS),
,") SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS), 5.2.2019 Tentin arvosteluperusteita: o Kurssin alku on osin kertausta SäAn ja prosessidynamiikkakursseista, jotka oletetaan
SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS), 5.2.2019 Tentin arvosteluperusteita: o Kurssin alku on osin kertausta SäAn ja prosessidynamiikkakursseista, jotka oletetaan
ELEC-C1230 Säätötekniikka. Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit
 ELEC-C3 Säätötekniikka Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit Hyvyyskriteerit Aikaisemmilla luennoilla on havainnollistettu, miten systeemien
ELEC-C3 Säätötekniikka Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit Hyvyyskriteerit Aikaisemmilla luennoilla on havainnollistettu, miten systeemien
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
ENSO IKONEN PYOSYS SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
Säätötekniikan matematiikan verkkokurssi, Matlab tehtäviä ja vastauksia 29.7.2002
 Matlab tehtäviä 1. Muodosta seuraavasta differentiaaliyhtälöstä siirtofuntio. Tämä differentiaaliyhtälö saattaisi kuvata esimerkiksi yksinkertaista vaimennettua jousi-massa systeemiä, johon on liitetty
Matlab tehtäviä 1. Muodosta seuraavasta differentiaaliyhtälöstä siirtofuntio. Tämä differentiaaliyhtälö saattaisi kuvata esimerkiksi yksinkertaista vaimennettua jousi-massa systeemiä, johon on liitetty
1 PID-taajuusvastesuunnittelun esimerkki
 Enso Ikonen, Oulun yliopisto, systeemitekniikan laboratorio 2/23 Säätöjärjestelmien suunnittelu 23 PID-taajuusvastesuunnittelun esimerkki Tehtävänä on suunnitella säätö prosessille ( ) = = ( +)( 2 + )
Enso Ikonen, Oulun yliopisto, systeemitekniikan laboratorio 2/23 Säätöjärjestelmien suunnittelu 23 PID-taajuusvastesuunnittelun esimerkki Tehtävänä on suunnitella säätö prosessille ( ) = = ( +)( 2 + )
Systeemin käyttäytyminen. ELEC-C1230 Säätötekniikka. Systeemin navat ja nollat. Systeemin navat ja nollat
 Systeemin käyttäytyminen ELEC-C1230 Säätötekniikka Luku 5: Navat ja nollat, systeemin nopeus, stabiilisuus ja värähtelyt, Routh-Hurwitz-kriteeri Systeemin tai järjestelmän tärkein ominaisuus on stabiilisuus.
Systeemin käyttäytyminen ELEC-C1230 Säätötekniikka Luku 5: Navat ja nollat, systeemin nopeus, stabiilisuus ja värähtelyt, Routh-Hurwitz-kriteeri Systeemin tai järjestelmän tärkein ominaisuus on stabiilisuus.
Hyvyyskriteerit. ELEC-C1230 Säätötekniikka. Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit
 Hyvyyskriteerit ELEC-C1230 Säätötekniikka Aikaisemmilla luennoilla on havainnollistettu, miten systeemien käyttäytymiseen voi vaikuttaa säätämällä niitä. Epästabiileista systeemeistä saadaan stabiileja,
Hyvyyskriteerit ELEC-C1230 Säätötekniikka Aikaisemmilla luennoilla on havainnollistettu, miten systeemien käyttäytymiseen voi vaikuttaa säätämällä niitä. Epästabiileista systeemeistä saadaan stabiileja,
Osatentti
 Osatentti 3 1.4.016 Nimi: Opiskelijanumero: Ohjeet: Kirjoita vastaukset paperissa annettuun tilaan. Lisävastaustilaa on paperin lopussa. Käytä selvää käsialaa. Laskin EI ole sallittu. Tenttikaavasto jaetaan.
Osatentti 3 1.4.016 Nimi: Opiskelijanumero: Ohjeet: Kirjoita vastaukset paperissa annettuun tilaan. Lisävastaustilaa on paperin lopussa. Käytä selvää käsialaa. Laskin EI ole sallittu. Tenttikaavasto jaetaan.
Y Yhtälöparista ratkaistiin vuorotellen siirtofunktiot laittamalla muut tulot nollaan. = K K K M. s 2 3s 2 KK P
 Säädön kotitehtävä vk3 t. 1 a) { Y =G K P E H E=R K N N G M Y Yhtälöparista ratkaistiin vuorotellen siirtofunktiot laittamalla muut tulot nollaan. G R s = Y R = GK P s 1 = KK 1 GK P K N G P M s 2 3s 2
Säädön kotitehtävä vk3 t. 1 a) { Y =G K P E H E=R K N N G M Y Yhtälöparista ratkaistiin vuorotellen siirtofunktiot laittamalla muut tulot nollaan. G R s = Y R = GK P s 1 = KK 1 GK P K N G P M s 2 3s 2
Tehtävä 1. Vaihtoehtotehtävät.
 Kem-9.47 Prosessiautomaation perusteet Tentti.4. Tehtävä. Vaihtoehtotehtävät. Oikea vastaus +,5p, väärä vastaus -,5p ja ei vastausta p Maksimi +5,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA
Kem-9.47 Prosessiautomaation perusteet Tentti.4. Tehtävä. Vaihtoehtotehtävät. Oikea vastaus +,5p, väärä vastaus -,5p ja ei vastausta p Maksimi +5,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA
Taajuustason tekniikat: Boden ja Nyquistin diagrammit, kompensaattorien suunnittelu. Vinkit 1 a
 ELEC-C3 Säätötekniikka 9. laskuharjoitus Taajuustason tekniikat: Boden ja Nyquistin diagrammit, kompensaattorien suunnittelu Vinkit a 3. Vaiheenjättökompensaattorin siirtofunktio: ( ) s W LAG s, a. s Vahvistus
ELEC-C3 Säätötekniikka 9. laskuharjoitus Taajuustason tekniikat: Boden ja Nyquistin diagrammit, kompensaattorien suunnittelu Vinkit a 3. Vaiheenjättökompensaattorin siirtofunktio: ( ) s W LAG s, a. s Vahvistus
MASSASÄILIÖN SIMULOINTI JA SÄÄTÖ Simulation and control of pulp tank
 MASSASÄILIÖN SIMULOINTI JA SÄÄTÖ Simulation and control of pulp tank Sonja Lindman Kandidaatintyö 10.4.2014 LUT Energia Sähkötekniikan koulutusohjelma TIIVISTELMÄ Lappeenrannan teknillinen yliopisto Teknillinen
MASSASÄILIÖN SIMULOINTI JA SÄÄTÖ Simulation and control of pulp tank Sonja Lindman Kandidaatintyö 10.4.2014 LUT Energia Sähkötekniikan koulutusohjelma TIIVISTELMÄ Lappeenrannan teknillinen yliopisto Teknillinen
Esimerkki: Laaduntasaussäiliö. Esimerkki: Laaduntasaussäiliö. Taajuusanalyysi. ELEC-C1230 Säätötekniikka. Luku 7: Taajuusanalyysi
 Taajuusanalyysi ELEC-C1230 Säätötekniikka Luku 7: Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
Taajuusanalyysi ELEC-C1230 Säätötekniikka Luku 7: Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
Esimerkki: Laaduntasaussäiliö. Esimerkki: Laaduntasaussäiliö. Taajuusanalyysi. ELEC-C1230 Säätötekniikka. Luku 7: Taajuusanalyysi
 Taajuusanalyysi ELEC-C1230 Säätötekniikka Luku 7: Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
Taajuusanalyysi ELEC-C1230 Säätötekniikka Luku 7: Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
Automaatiotekniikan laskentatyökalut (ALT)
") Ohjeita ja esimerkkejä kurssin 477604S näyttökoetta varten Automaatiotekniikan laskentatyökalut (ALT) Enso Ikonen 6/2008 Oulun yliopisto, Prosessi- ja ympäristötekniikan osasto, systeemitekniikan laboratorio
Ohjeita ja esimerkkejä kurssin 477604S näyttökoetta varten Automaatiotekniikan laskentatyökalut (ALT) Enso Ikonen 6/2008 Oulun yliopisto, Prosessi- ja ympäristötekniikan osasto, systeemitekniikan laboratorio
ELEC-C1230 Säätötekniikka. Luku 7: Taajuusanalyysi
 ELEC-C123 Säätötekniikka Luku 7: Taajuusanalyysi Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
ELEC-C123 Säätötekniikka Luku 7: Taajuusanalyysi Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
Tietokoneavusteinen säätösuunnittelu (TASSU)
") Ohjeita ja esimerkkejä kurssin 470463A näyttökoetta varten Tietokoneavusteinen säätösuunnittelu (TASSU) Enso Ikonen 9/2006 Oulun yliopisto, Prosessi- ja ympäristötekniikan osasto, systeemitekniikan laboratorio
Ohjeita ja esimerkkejä kurssin 470463A näyttökoetta varten Tietokoneavusteinen säätösuunnittelu (TASSU) Enso Ikonen 9/2006 Oulun yliopisto, Prosessi- ja ympäristötekniikan osasto, systeemitekniikan laboratorio
Dynaamisten systeemien teoriaa. Systeemianalyysilaboratorio II
 Dynaamisten systeemien teoriaa Systeemianalyysilaboratorio II 15.11.2017 Vakiot, sisäänmenot, ulostulot ja häiriöt Mallin vakiot Systeemiparametrit annettuja vakioita, joita ei muuteta; esim. painovoiman
Dynaamisten systeemien teoriaa Systeemianalyysilaboratorio II 15.11.2017 Vakiot, sisäänmenot, ulostulot ja häiriöt Mallin vakiot Systeemiparametrit annettuja vakioita, joita ei muuteta; esim. painovoiman
Osatentti
 Osatentti 2.8.205 Nimi: Opiskelijanumero: Ohjeet: Vastaa kysymyspaperiin ja kysymyksille varattuun tilaan. Laskin ei ole sallittu. Tenttikaavasto jaetaan. Kaavastoon EI merkintöjä. Palauta kaavasto tämän
Osatentti 2.8.205 Nimi: Opiskelijanumero: Ohjeet: Vastaa kysymyspaperiin ja kysymyksille varattuun tilaan. Laskin ei ole sallittu. Tenttikaavasto jaetaan. Kaavastoon EI merkintöjä. Palauta kaavasto tämän
Elektroniikka, kierros 3
 Elektroniikka, kierros 3 1. a) Johda kuvan 1 esittämän takaisinkytketyn systeemin suljetun silmukan vahvistuksen f lauseke. b) Osoita, että kun silmukkavahvistus β 1, niin suljetun silmukan vahvistus f
Elektroniikka, kierros 3 1. a) Johda kuvan 1 esittämän takaisinkytketyn systeemin suljetun silmukan vahvistuksen f lauseke. b) Osoita, että kun silmukkavahvistus β 1, niin suljetun silmukan vahvistus f
Harjoitus 1. Tehtävä 1. Malliratkaisut. f(t) = e (t α) cos(ω 0 t + β) L[f(t)] = f(t)e st dt = e st t+α cos(ω 0 t + β)dt.
![Harjoitus 1. Tehtävä 1. Malliratkaisut. f(t) = e (t α) cos(ω 0 t + β) L[f(t)] = f(t)e st dt = e st t+α cos(ω 0 t + β)dt.](/thumbs/95/125776102.jpg "Harjoitus 1. Tehtävä 1. Malliratkaisut. f(t) = e (t α) cos(ω 0 t + β) L[f(t)] = f(t)e st dt = e st t+α cos(ω 0 t + β)dt.") Harjoitus Malliratkaisut Tehtävä L[f(t)] ˆ f(t) e (t α) cos(ω t + β) f(t)e st dt ˆ e st t+α cos(ω t + β)dt cos(ω t + β) 2 (ej(ωt+β) + e j(ωt+β) ) L[f(t)] 2 eα 2 ˆ ˆ e st t+α (e j(ω t+β) + e j(ω t+β) )
Harjoitus Malliratkaisut Tehtävä L[f(t)] ˆ f(t) e (t α) cos(ω t + β) f(t)e st dt ˆ e st t+α cos(ω t + β)dt cos(ω t + β) 2 (ej(ωt+β) + e j(ωt+β) ) L[f(t)] 2 eα 2 ˆ ˆ e st t+α (e j(ω t+β) + e j(ω t+β) )
Laplace-muunnos: määritelmä
 Laplace-muunnos: määritelmä Olkoon f : [, [ R funktio. Funktion f Laplacen muunnos määritellään yhtälöllä F(s) = L(f) := f(t)e st dt edellyttäen, että integraali f(t)e st dt suppenee. Riittävä ehto integraalin
Laplace-muunnos: määritelmä Olkoon f : [, [ R funktio. Funktion f Laplacen muunnos määritellään yhtälöllä F(s) = L(f) := f(t)e st dt edellyttäen, että integraali f(t)e st dt suppenee. Riittävä ehto integraalin
Y (s) = G(s)(W (s) W 0 (s)). Tarkastellaan nyt tilannetta v(t) = 0, kun t < 3 ja v(t) = 1, kun t > 3. u(t) = K p y(t) K I
 = G(s)(W (s) W 0 (s)). Tarkastellaan nyt tilannetta v(t) = 0, kun t < 3 ja v(t) = 1, kun t > 3. u(t) = K p y(t) K I") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 6. harjoituksen ratkaisut. Laplace-tasossa saadaan annetulle venttiilille W (s) W (s)
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 6. harjoituksen ratkaisut. Laplace-tasossa saadaan annetulle venttiilille W (s) W (s)
PID-sa a timen viritta minen Matlabilla ja simulinkilla
 PID-sa a timen viritta minen Matlabilla ja simulinkilla Kriittisen värähtelyn menetelmä Tehtiin kuvan 1 mukainen tasavirtamoottorin piiri PID-säätimellä. Virittämistä varten PID-säätimen ja asetettiin
PID-sa a timen viritta minen Matlabilla ja simulinkilla Kriittisen värähtelyn menetelmä Tehtiin kuvan 1 mukainen tasavirtamoottorin piiri PID-säätimellä. Virittämistä varten PID-säätimen ja asetettiin
Harjoitus 6: Simulink - Säätöteoria. Syksy 2006. Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1
 Harjoitus 6: Simulink - Säätöteoria Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen säätötekniikkaan Takaisinkytkennän
Harjoitus 6: Simulink - Säätöteoria Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen säätötekniikkaan Takaisinkytkennän
y (0) = 0 y h (x) = C 1 e 2x +C 2 e x e10x e 3 e8x dx + e x 1 3 e9x dx = e 2x 1 3 e8x 1 8 = 1 24 e10x 1 27 e10x = e 10x e10x
 = 0 y h (x) = C 1 e 2x +C 2 e x e10x e 3 e8x dx + e x 1 3 e9x dx = e 2x 1 3 e8x 1 8 = 1 24 e10x 1 27 e10x = e 10x e10x") BM0A5830 Differentiaaliyhtälöiden peruskurssi Harjoitus 4, Kevät 017 Päivityksiä: 1. Ratkaise differentiaaliyhtälöt 3y + 4y = 0 ja 3y + 4y = e x.. Ratkaise DY (a) 3y 9y + 6y = e 10x (b) Mikä on edellisen
BM0A5830 Differentiaaliyhtälöiden peruskurssi Harjoitus 4, Kevät 017 Päivityksiä: 1. Ratkaise differentiaaliyhtälöt 3y + 4y = 0 ja 3y + 4y = e x.. Ratkaise DY (a) 3y 9y + 6y = e 10x (b) Mikä on edellisen
Differentiaaliyhtälöt II, kevät 2017 Harjoitus 5
 Differentiaaliyhtälöt II, kevät 27 Harjoitus 5 Heikki Korpela 26. huhtikuuta 27 Tehtävä 2. Määrää seuraavan autonomisen systeemin kriittiset pisteet, ratakäyrät ja luonnostele systeemin aikakehitys: (t)
Differentiaaliyhtälöt II, kevät 27 Harjoitus 5 Heikki Korpela 26. huhtikuuta 27 Tehtävä 2. Määrää seuraavan autonomisen systeemin kriittiset pisteet, ratakäyrät ja luonnostele systeemin aikakehitys: (t)
z muunnos ja sen soveltaminen LTI järjestelmien analysointiin
 z muunnos ja sen soveltaminen LTI järjestelmien analysointiin muunnoksella (eng. transform) on vastaava asema diskreettiaikaisten signaalien ja LTI järjestelmien analyysissä kuin Laplace muunnoksella jatkuvaaikaisten
z muunnos ja sen soveltaminen LTI järjestelmien analysointiin muunnoksella (eng. transform) on vastaava asema diskreettiaikaisten signaalien ja LTI järjestelmien analyysissä kuin Laplace muunnoksella jatkuvaaikaisten
4. kierros. 1. Lähipäivä
 4. kierros 1. Lähipäivä Viikon aihe Taajuuskompensointi, operaatiovahvistin ja sen kytkennät Taajuuskompensaattorit Mitoitus Kontaktiopetusta: 8 h Kotitehtäviä: 4 h + 0 h Tavoitteet: tietää Operaatiovahvistimen
4. kierros 1. Lähipäivä Viikon aihe Taajuuskompensointi, operaatiovahvistin ja sen kytkennät Taajuuskompensaattorit Mitoitus Kontaktiopetusta: 8 h Kotitehtäviä: 4 h + 0 h Tavoitteet: tietää Operaatiovahvistimen
Matlabin perusteet. 1. Käyttöliittymä:
 Matlabin perusteet Matlabin (MATrix LABoratory) perusfilosofia on, että se käsittelee kaikkia muuttujia matriiseina, joiden erikoistapauksia ovat vektorit ja skalaariluvut. Näin ollen se soveltuu erityisesti
Matlabin perusteet Matlabin (MATrix LABoratory) perusfilosofia on, että se käsittelee kaikkia muuttujia matriiseina, joiden erikoistapauksia ovat vektorit ja skalaariluvut. Näin ollen se soveltuu erityisesti
Digitaalinen Signaalinkäsittely T0125 Luento 4-7.04.2006
 Digitaalinen Signaalinkäsittely T5 Luento 4-7.4.6 Jarkko.Vuori@evtek.fi Z-taso Z-taso on paljon käytetty graafinen esitystapa jonka avulla voidaan tarkastella signaalien taajuussisältöjä sekä järjestelmien
Digitaalinen Signaalinkäsittely T5 Luento 4-7.4.6 Jarkko.Vuori@evtek.fi Z-taso Z-taso on paljon käytetty graafinen esitystapa jonka avulla voidaan tarkastella signaalien taajuussisältöjä sekä järjestelmien
3. kierros. 1. Lähipäivä
 3. kierros 1. Lähipäivä Viikon aihe (viikko 1/2) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
3. kierros 1. Lähipäivä Viikon aihe (viikko 1/2) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
Y (z) = z-muunnos on lineaarinen kuten Laplace-muunnoskin
 = z-muunnos on lineaarinen kuten Laplace-muunnoskin") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 3. harjoituksen ratkaisut. Vapaan vasteen löytämiseksi asetetaan ohjaukseksi u(t)
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 3. harjoituksen ratkaisut. Vapaan vasteen löytämiseksi asetetaan ohjaukseksi u(t)
Moottorin säätö. Miikka Ihonen 67367P Sampo Salo 79543L Kalle Spoof 83912K John Boström 83962B Venla Viitanen 84514C
 Moottorin säätö Miikka Ihonen 67367P Sampo Salo 79543L Kalle Spoof 83912K John Boström 83962B Venla Viitanen 84514C Tehtävän määrittely Tehtävän aiheena on moottorin tyhjäkäynnin säätö. Tehtävässä tulee
Moottorin säätö Miikka Ihonen 67367P Sampo Salo 79543L Kalle Spoof 83912K John Boström 83962B Venla Viitanen 84514C Tehtävän määrittely Tehtävän aiheena on moottorin tyhjäkäynnin säätö. Tehtävässä tulee
12. Stabiilisuus. Olkoon takaisinkytketyn vahvistimen vahvistus A F (s) :
 :") 1. Stabiilisuus Olkoon takaisinkytketyn vahvistimen vahvistus A F (s) : AOL ( s) AF ( s) (13 10) 1+ T ( s) A OL :n ja T:n määrittäminen kuvattiin oppikirjan 1-7 kappaleessa. Näiden taajuus käyttäytyminen
1. Stabiilisuus Olkoon takaisinkytketyn vahvistimen vahvistus A F (s) : AOL ( s) AF ( s) (13 10) 1+ T ( s) A OL :n ja T:n määrittäminen kuvattiin oppikirjan 1-7 kappaleessa. Näiden taajuus käyttäytyminen
Signaalit ja järjestelmät aika- ja taajuusalueissa
 Signaalit ja järjestelmät aika- ja taajuusalueissa Signaalit aika ja taajuusalueissa Muunnokset aika ja taajuusalueiden välillä Fourier sarja (jaksollinen signaali) Fourier muunnos (jaksoton signaali)
Signaalit ja järjestelmät aika- ja taajuusalueissa Signaalit aika ja taajuusalueissa Muunnokset aika ja taajuusalueiden välillä Fourier sarja (jaksollinen signaali) Fourier muunnos (jaksoton signaali)
2. kierros. 1. Lähipäivä
 2. kierros. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 + 4 tuntia Tavoitteet: tietää Yhden navan vasteen ekvivalentti
2. kierros. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 + 4 tuntia Tavoitteet: tietää Yhden navan vasteen ekvivalentti
Dynaamisten systeemien identifiointi 1/2
 Dynaamisten systeemien identifiointi 1/2 Mallin rakentaminen mittausten avulla Epäparametriset menetelmät: tuloksena malli, joka ei perustu parametreille impulssi-, askel- tai taajusvaste siirtofunktion
Dynaamisten systeemien identifiointi 1/2 Mallin rakentaminen mittausten avulla Epäparametriset menetelmät: tuloksena malli, joka ei perustu parametreille impulssi-, askel- tai taajusvaste siirtofunktion
LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi. Servokäyttö (0,9 op)
") LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi Servokäyttö (0,9 op) JOHDNTO Työssä tarkastellaan kestomagnetoitua tasavirtamoottoria. oneelle viritetään PI-säätäjä
LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi Servokäyttö (0,9 op) JOHDNTO Työssä tarkastellaan kestomagnetoitua tasavirtamoottoria. oneelle viritetään PI-säätäjä
SGN-1200 Signaalinkäsittelyn menetelmät Välikoe
 SGN-100 Signaalinkäsittelyn menetelmät Välikoe 6.4.010 Sivuilla 1- on. Älä vastaa siihen, jos et ollut ensimmäisessä välikokeessa. Tentin kysymykset ovat sivuilla 3-4. Vastaa vain jompaan kumpaan kokeeseen,
SGN-100 Signaalinkäsittelyn menetelmät Välikoe 6.4.010 Sivuilla 1- on. Älä vastaa siihen, jos et ollut ensimmäisessä välikokeessa. Tentin kysymykset ovat sivuilla 3-4. Vastaa vain jompaan kumpaan kokeeseen,
SGN-1200 Signaalinkäsittelyn menetelmät, Tentti
 SGN-1200 Signaalinkäsittelyn menetelmät, Tentti 5.5.2008 Kirjoita nimesi ja opiskelijanumerosi jokaiseen paperiin. Vastauspaperit tullaan irrottamaan toisistaan. Jos tila ei riitä, jatka kääntöpuolelle
SGN-1200 Signaalinkäsittelyn menetelmät, Tentti 5.5.2008 Kirjoita nimesi ja opiskelijanumerosi jokaiseen paperiin. Vastauspaperit tullaan irrottamaan toisistaan. Jos tila ei riitä, jatka kääntöpuolelle
Kon Hydraulijärjestelmät
 Kon-41.4040 Hydraulijärjestelmät Laboratorioharjoitus 2: Sähköhydraulisen järjestelmän säätö Jyri Juhala Jyrki Kajaste (Heikki Kauranne) Hydraulijärjestelmän venttiilin ohjausmenetelmät Ohjaus Kompensointi
Kon-41.4040 Hydraulijärjestelmät Laboratorioharjoitus 2: Sähköhydraulisen järjestelmän säätö Jyri Juhala Jyrki Kajaste (Heikki Kauranne) Hydraulijärjestelmän venttiilin ohjausmenetelmät Ohjaus Kompensointi
ELEC-C1230 Säätötekniikka 10. laskuharjoitus Taajuustason tekniikat: Boden ja Nyquistin diagrammit, kompensaattorien suunnittelu
 ELEC-C23 Säätötekniikka. laskuharjoitus Taajuustason tekniikat: Boden ja Nyquistin diagrait, kopensaattorien suunnittelu Quiz: Alla olevassa kuvassa on esitetty vaiheenjohtokopensaattorin siirtofunktio,
ELEC-C23 Säätötekniikka. laskuharjoitus Taajuustason tekniikat: Boden ja Nyquistin diagrait, kopensaattorien suunnittelu Quiz: Alla olevassa kuvassa on esitetty vaiheenjohtokopensaattorin siirtofunktio,
Analogiatekniikka. Analogiatekniikka
 1 Opintojakson osaamistavoitteet Opintojakson hyväksytysti suoritettuaan opiskelija: osaa soveltaa ja tulkita siirtofunktiota, askelvastetta, Bodediagrammia ja napa-nolla-kuvaajaa lineaarisen, dynaamisen
1 Opintojakson osaamistavoitteet Opintojakson hyväksytysti suoritettuaan opiskelija: osaa soveltaa ja tulkita siirtofunktiota, askelvastetta, Bodediagrammia ja napa-nolla-kuvaajaa lineaarisen, dynaamisen
Alias-ilmiö eli taajuuden laskostuminen
 Prosessiorientoituneet mallit Todellista hybridijärjestelmää ELEC-C1230 Säätötekniikka Luku 12: Näytteenottoteoreema ja jatkuvien säätimien diskreetit approksimaatiot Prosessiorientoituneet mallit katsotaan
Prosessiorientoituneet mallit Todellista hybridijärjestelmää ELEC-C1230 Säätötekniikka Luku 12: Näytteenottoteoreema ja jatkuvien säätimien diskreetit approksimaatiot Prosessiorientoituneet mallit katsotaan
Tilaesityksen hallinta ja tilasäätö. ELEC-C1230 Säätötekniikka. Luku 6: Tilasäätö, tilaestimointi, saavutettavuus ja tarkkailtavuus
 Tilaesityksen hallinta ja tilasäätö ELEC-C1230 Säätötekniikka Luku 6: Tilasäätö, tilaestimointi, saavutettavuus ja tarkkailtavuus Edellisessä luvussa tarkasteltiin napoja ja nollia sekä niiden vaikutuksia
Tilaesityksen hallinta ja tilasäätö ELEC-C1230 Säätötekniikka Luku 6: Tilasäätö, tilaestimointi, saavutettavuus ja tarkkailtavuus Edellisessä luvussa tarkasteltiin napoja ja nollia sekä niiden vaikutuksia
2. kierros. 2. Lähipäivä
 2. kierros 2. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Tavoitteet: tietää Yhden navan vasteen ekvivalentti kohinakaistaleveys Vastuksen terminen kohina Termit
2. kierros 2. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Tavoitteet: tietää Yhden navan vasteen ekvivalentti kohinakaistaleveys Vastuksen terminen kohina Termit
Matemaattinen Analyysi
 Vaasan yliopisto, kevät 01 / ORMS1010 Matemaattinen Analyysi. harjoitus, viikko 1 R1 ke 1 16 D11 (..) R to 10 1 D11 (..) 1. Määritä funktion y(x) MacLaurinin sarjan kertoimet, kun y(0) = ja y (x) = (x
Vaasan yliopisto, kevät 01 / ORMS1010 Matemaattinen Analyysi. harjoitus, viikko 1 R1 ke 1 16 D11 (..) R to 10 1 D11 (..) 1. Määritä funktion y(x) MacLaurinin sarjan kertoimet, kun y(0) = ja y (x) = (x
Missä mennään. systeemi. identifiointi. mallikandidaatti. validointi. malli. (fysikaalinen) mallintaminen. mallin mallin käyttötarkoitus, reunaehdot
 mallintaminen. mallin mallin käyttötarkoitus, reunaehdot") Missä mennään systeemi mallin mallin käyttötarkoitus, reunaehdot käyttö- (fysikaalinen) mallintaminen luonnonlait yms. yms. identifiointi kokeita kokeita + päättely päättely vertailu mallikandidaatti validointi
Missä mennään systeemi mallin mallin käyttötarkoitus, reunaehdot käyttö- (fysikaalinen) mallintaminen luonnonlait yms. yms. identifiointi kokeita kokeita + päättely päättely vertailu mallikandidaatti validointi
Luento 8. Suodattimien käyttötarkoitus
 Luento 8 Lineaarinen suodatus Ideaaliset alipäästö, ylipäästö ja kaistanpäästösuodattimet Käytännölliset suodattimet 8..006 Suodattimien käyttötarkoitus Signaalikaistan ulkopuolisen kohinan ja häiriöiden
Luento 8 Lineaarinen suodatus Ideaaliset alipäästö, ylipäästö ja kaistanpäästösuodattimet Käytännölliset suodattimet 8..006 Suodattimien käyttötarkoitus Signaalikaistan ulkopuolisen kohinan ja häiriöiden
Säätötekniikan alkeita
 Säätötekniikan alkeita Säätötekniikan avulla pyritään ohjaamaan erilaisia i i järjestelmiäj älyä sisältävällä menetelmällä. Tavoitteena on saada systeemi käyttäytymään halutulla tavalla luotettavasti,
Säätötekniikan alkeita Säätötekniikan avulla pyritään ohjaamaan erilaisia i i järjestelmiäj älyä sisältävällä menetelmällä. Tavoitteena on saada systeemi käyttäytymään halutulla tavalla luotettavasti,
Esimerkki 1 Ratkaise differentiaaliyhtälö
 Esimerkki 1 Ratkaise differentiaaliyhtälö x 2 y xy =1/x. 1 / K. Tuominen kimmo.i.tuominen@helsinki.fi MApu II 1/20 20 Esimerkki 2 Ratkaise differentiaaliyhtälö x(ln y)y y ln x =0. 2 / K. Tuominen kimmo.i.tuominen@helsinki.fi
Esimerkki 1 Ratkaise differentiaaliyhtälö x 2 y xy =1/x. 1 / K. Tuominen kimmo.i.tuominen@helsinki.fi MApu II 1/20 20 Esimerkki 2 Ratkaise differentiaaliyhtälö x(ln y)y y ln x =0. 2 / K. Tuominen kimmo.i.tuominen@helsinki.fi
1. Piirrä kompleksitasoon seuraavat matemaattiset objektit/alueet.
 BM0A5700 - Integraalimuunnokset Harjoitus 1 1. Piirrä kompleksitasoon seuraavat matemaattiset objektit/alueet. a Piste z 1 i. Ympyrä z 1 i. Avoin kiekko z 1 i
BM0A5700 - Integraalimuunnokset Harjoitus 1 1. Piirrä kompleksitasoon seuraavat matemaattiset objektit/alueet. a Piste z 1 i. Ympyrä z 1 i. Avoin kiekko z 1 i
ELEC-C1230 Säätötekniikka
 Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
ELEC-C1230 Säätötekniikka
 Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
Boost-hakkuri. Hakkurin tilaesitykset
 Boost-hakkuri Boost-hakkurilla on toiminnassaan kaksi tilaa. Päällä, jolloin kytkimestä virtapiiri on suljettu ja pois silloin kun virtapiiri on kytkimestä aukaistu. Kummallekin tilalle tulee muodostaa
Boost-hakkuri Boost-hakkurilla on toiminnassaan kaksi tilaa. Päällä, jolloin kytkimestä virtapiiri on suljettu ja pois silloin kun virtapiiri on kytkimestä aukaistu. Kummallekin tilalle tulee muodostaa
Luento 13: Periodinen liike. Johdanto Harmoninen värähtely Esimerkkejä F t F r
 Luento 13: Periodinen liike Johdanto Harmoninen värähtely Esimerkkejä θ F t m g F r 1 / 27 Luennon sisältö Johdanto Harmoninen värähtely Esimerkkejä 2 / 27 Johdanto Tarkastellaan jaksollista liikettä (periodic
Luento 13: Periodinen liike Johdanto Harmoninen värähtely Esimerkkejä θ F t m g F r 1 / 27 Luennon sisältö Johdanto Harmoninen värähtely Esimerkkejä 2 / 27 Johdanto Tarkastellaan jaksollista liikettä (periodic
a) z 1 + z 2, b) z 1 z 2, c) z 1 z 2, d) z 1 z 2 = 4+10i 4 = 10i 5 = 2i. 4 ( 1)
 z 1 + z 2, b) z 1 z 2, c) z 1 z 2, d) z 1 z 2 = 4+10i 4 = 10i 5 = 2i. 4 ( 1)") Matematiikan johdantokurssi, syksy 06 Harjoitus, ratkaisuista. Osoita, että kompleksilukujen yhteenlasku määriteltynä tasopisteiden kautta koordinaateittain on liitännäinen, so. z + (z + z ) = (z + z )
Matematiikan johdantokurssi, syksy 06 Harjoitus, ratkaisuista. Osoita, että kompleksilukujen yhteenlasku määriteltynä tasopisteiden kautta koordinaateittain on liitännäinen, so. z + (z + z ) = (z + z )
Differentiaaliyhtälön ratkaisu. ELEC-C1230 Säätötekniikka. Esimerkki: läpivirtaussäiliö. Esimerkki: läpivirtaussäiliö
 Differentiaaliyhtälön ratkaisu ELEC-C1230 Säätötekniikka Luku 3: Dynaamisen vasteen määrittäminen, Laplace-muunnos, siirtofunktio Systeemin ymmärtämisen ja hallinnan kannalta on olennaista tietää, miten
Differentiaaliyhtälön ratkaisu ELEC-C1230 Säätötekniikka Luku 3: Dynaamisen vasteen määrittäminen, Laplace-muunnos, siirtofunktio Systeemin ymmärtämisen ja hallinnan kannalta on olennaista tietää, miten
Säätötekniikkaa. Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla
 ohjaus, joka saa systeemin toimimaan halutulla tavalla") Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Harjoitus 4: Differentiaaliyhtälöt (Matlab) MS-C2107 Sovelletun matematiikan tietokonetyöt 1
 MS-C2107 Sovelletun matematiikan tietokonetyöt 1") Harjoitus 4: Differentiaaliyhtälöt (Matlab) MS-C2107 Sovelletun matematiikan tietokonetyöt MS-C2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Matlab:n solver komento differentiaaliyhtöiden
Harjoitus 4: Differentiaaliyhtälöt (Matlab) MS-C2107 Sovelletun matematiikan tietokonetyöt MS-C2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Matlab:n solver komento differentiaaliyhtöiden
SGN-1200 Signaalinkäsittelyn menetelmät Välikoe
 SGN-00 Signaalinkäsittelyn menetelmät Välikoe 9.3.009 Sivuilla - on. Älä vastaa siihen, jos et ollut ensimmäisessä välikokeessa. Tentin kysymykset ovat sivuilla 3-4. Vastaa vain jompaan kumpaan kokeeseen,
SGN-00 Signaalinkäsittelyn menetelmät Välikoe 9.3.009 Sivuilla - on. Älä vastaa siihen, jos et ollut ensimmäisessä välikokeessa. Tentin kysymykset ovat sivuilla 3-4. Vastaa vain jompaan kumpaan kokeeseen,
Kompleksianalyysi, viikko 6
 Kompleksianalyysi, viikko 6 Jukka Kemppainen Mathematics Division Funktion erikoispisteet Määr. 1 Jos f on analyyttinen pisteen z 0 aidossa ympäristössä 0 < z z 0 < r jollakin r > 0, niin sanotaan, että
Kompleksianalyysi, viikko 6 Jukka Kemppainen Mathematics Division Funktion erikoispisteet Määr. 1 Jos f on analyyttinen pisteen z 0 aidossa ympäristössä 0 < z z 0 < r jollakin r > 0, niin sanotaan, että
Säätötekniikkaa. Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla
 ohjaus, joka saa systeemin toimimaan halutulla tavalla") Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt
 MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Differentiaaliyhtälöt. osa 2 Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 1 R. Kangaslampi Matriisihajotelmista
MS-C1340 Lineaarialgebra ja differentiaaliyhtälöt Differentiaaliyhtälöt. osa 2 Riikka Kangaslampi Matematiikan ja systeemianalyysin laitos Aalto-yliopisto 2015 1 / 1 R. Kangaslampi Matriisihajotelmista
z 1+i (a) f (z) = 3z 4 5z 3 + 2z (b) f (z) = z 4z + 1 f (z) = 12z 3 15z 2 + 2
 f (z) = 3z 4 5z 3 + 2z (b) f (z) = z 4z + 1 f (z) = 12z 3 15z 2 + 2") BM20A5700 - Integraauunnokset Harjoitus 2 1. Laske seuraavat raja-arvot. -kohta ratkeaa, kun pistät sekä yläkerran että alakerran muotoon (z z 1 )(z z 2 ), missä siis z 1 ja z 2 ovat näiden lausekkeiden
BM20A5700 - Integraauunnokset Harjoitus 2 1. Laske seuraavat raja-arvot. -kohta ratkeaa, kun pistät sekä yläkerran että alakerran muotoon (z z 1 )(z z 2 ), missä siis z 1 ja z 2 ovat näiden lausekkeiden
2. Funktiot. Keijo Ruotsalainen. Mathematics Division
 2. Funktiot Keijo Ruotsalainen Mathematics Division Kompleksimuuttujan funktio Kompleksimuuttujan z kompleksiarvoinen funktio f(z) voi olla yksiarvoinen tai moniarvoinen, esimerkiksi f(z) = e z f(z) =
2. Funktiot Keijo Ruotsalainen Mathematics Division Kompleksimuuttujan funktio Kompleksimuuttujan z kompleksiarvoinen funktio f(z) voi olla yksiarvoinen tai moniarvoinen, esimerkiksi f(z) = e z f(z) =
Insinöörimatematiikka D
 Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
Insinöörimatematiikka D M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Matematiikan ja tilastotieteen laitos Turun yliopisto 2015 M. Hirvensalo mikhirve@utu.fi V. Junnila viljun@utu.fi Luentokalvot
Differentiaali- ja integraalilaskenta 1 Ratkaisut 5. viikolle /
 MS-A8 Differentiaali- ja integraalilaskenta, V/7 Differentiaali- ja integraalilaskenta Ratkaisut 5. viikolle / 9..5. Integroimismenetelmät Tehtävä : Laske osittaisintegroinnin avulla a) π x sin(x) dx,
MS-A8 Differentiaali- ja integraalilaskenta, V/7 Differentiaali- ja integraalilaskenta Ratkaisut 5. viikolle / 9..5. Integroimismenetelmät Tehtävä : Laske osittaisintegroinnin avulla a) π x sin(x) dx,
Harjoitus Etsi seuraavien autonomisten yhtälöiden kriittiset pisteet ja tutki niiden stabiliteettia:
 Differentiaaliyhtälöt, Kesä 216 Harjoitus 2 1. Etsi seuraavien autonomisten yhtälöiden kriittiset pisteet ja tutki niiden stabiliteettia: (a) y = (2 y) 3, (b) y = (y 1) 2, (c) y = 2y y 2. 2. Etsi seuraavien
Differentiaaliyhtälöt, Kesä 216 Harjoitus 2 1. Etsi seuraavien autonomisten yhtälöiden kriittiset pisteet ja tutki niiden stabiliteettia: (a) y = (2 y) 3, (b) y = (y 1) 2, (c) y = 2y y 2. 2. Etsi seuraavien
Järjestelmien kokoaminen osasysteemeistä. ELEC-C1230 Säätötekniikka. Lohkokaaviomuunnokset: Signaalit. Signaalin kulkeminen lohkon läpi
 Järjestelmien kokoaminen osasysteemeistä ELEC-C1230 Säätötekniikka Luku 4: Lohkokaaviomuunnokset, PID-säädin ja kompensaattorit, Edellisillä luennoilla on tarkasteltu yksittäisiä ilmiöitä ja niiden malleja
Järjestelmien kokoaminen osasysteemeistä ELEC-C1230 Säätötekniikka Luku 4: Lohkokaaviomuunnokset, PID-säädin ja kompensaattorit, Edellisillä luennoilla on tarkasteltu yksittäisiä ilmiöitä ja niiden malleja
Matemaattinen Analyysi
 Vaasan yliopisto, syksy 2016 / ORMS1010 Matemaattinen Analyysi 8. harjoitus, viikko 49 R1 to 12 14 F453 (8.12.) R2 to 14 16 F345 (8.12.) R3 ke 8 10 F345 (7.11.) 1. Määritä funktion f (x) = 1 Taylorin sarja
Vaasan yliopisto, syksy 2016 / ORMS1010 Matemaattinen Analyysi 8. harjoitus, viikko 49 R1 to 12 14 F453 (8.12.) R2 to 14 16 F345 (8.12.) R3 ke 8 10 F345 (7.11.) 1. Määritä funktion f (x) = 1 Taylorin sarja
Tilayhtälötekniikasta
 Tilayhtälötekniikasta Tilayhtälöesityksessä it ä useamman kertaluvun differentiaaliyhtälö esitetään ensimmäisen kertaluvun differentiaaliyhtälöryhmänä. Jokainen ensimmäisen kertaluvun differentiaaliyhtälö
Tilayhtälötekniikasta Tilayhtälöesityksessä it ä useamman kertaluvun differentiaaliyhtälö esitetään ensimmäisen kertaluvun differentiaaliyhtälöryhmänä. Jokainen ensimmäisen kertaluvun differentiaaliyhtälö
SIMULINK 5.0 Harjoitus. Matti Lähteenmäki 2004 www.tpu.fi/~mlahteen/
 SIMULINK 5.0 Harjoitus 2004 www.tpu.fi/~mlahteen/ SIMULINK 5.0 Harjoitus 2 Harjoitustehtävä. Tarkastellaan kuvan mukaisen yhden vapausasteen jousi-massa-vaimennin systeemin vaakasuuntaista pakkovärähtelyä,
SIMULINK 5.0 Harjoitus 2004 www.tpu.fi/~mlahteen/ SIMULINK 5.0 Harjoitus 2 Harjoitustehtävä. Tarkastellaan kuvan mukaisen yhden vapausasteen jousi-massa-vaimennin systeemin vaakasuuntaista pakkovärähtelyä,
FYSA2031 Potentiaalikuoppa
 FYSA2031 Potentiaalikuoppa Työselostus Laura Laulumaa JYFL YK216 laura.e.laulumaa@student.jyu.fi 16.10-2.11. 2017 Ohjaus Työn ja ohjelman esittely ( 30 min) Harjoitellaan ohjelman käyttöä Harmoninen potentiaali
FYSA2031 Potentiaalikuoppa Työselostus Laura Laulumaa JYFL YK216 laura.e.laulumaa@student.jyu.fi 16.10-2.11. 2017 Ohjaus Työn ja ohjelman esittely ( 30 min) Harjoitellaan ohjelman käyttöä Harmoninen potentiaali
1 Vastaa seuraaviin. b) Taajuusvasteen
 Taajuusvasteen") Vastaa seuraaviin a) Miten määritetään digitaalisen suodattimen taajuusvaste sekä amplitudi- ja vaihespektri? Tässä riittää sanallinen kuvaus. b) Miten viivästys vaikuttaa signaalin amplitudi- ja vaihespektriin?
Vastaa seuraaviin a) Miten määritetään digitaalisen suodattimen taajuusvaste sekä amplitudi- ja vaihespektri? Tässä riittää sanallinen kuvaus. b) Miten viivästys vaikuttaa signaalin amplitudi- ja vaihespektriin?
Mat Systeemien identifiointi, aihepiirit 1/4
 , aihepiirit 1/4 Dynaamisten systeemien matemaattinen mallintaminen ja analyysi Matlab (System Identification Toolbox), Simulink 1. Matemaattinen mallintaminen: Mallintamisen ja mallin määritelmät Fysikaalinen
, aihepiirit 1/4 Dynaamisten systeemien matemaattinen mallintaminen ja analyysi Matlab (System Identification Toolbox), Simulink 1. Matemaattinen mallintaminen: Mallintamisen ja mallin määritelmät Fysikaalinen
Harjoitus 5: Simulink
 Harjoitus 5: Simulink Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen Simulinkiin Differentiaaliyhtälöiden
Harjoitus 5: Simulink Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen Simulinkiin Differentiaaliyhtälöiden
1 WKB-approksimaatio. Yleisiä ohjeita. S Harjoitus
 S-114.1427 Harjoitus 3 29 Yleisiä ohjeita Ratkaise tehtävät MATLABia käyttäen. Kirjoita ratkaisut.m-tiedostoihin. Tee tuloksistasi lyhyt seloste, jossa esität laskemasi arvot sekä piirtämäsi kuvat (sekä
S-114.1427 Harjoitus 3 29 Yleisiä ohjeita Ratkaise tehtävät MATLABia käyttäen. Kirjoita ratkaisut.m-tiedostoihin. Tee tuloksistasi lyhyt seloste, jossa esität laskemasi arvot sekä piirtämäsi kuvat (sekä
Katsaus suodatukseen
 Katsaus suodatukseen Suodatuksen perustaa, ideaaliset suotimet, käytännön toteutuksia Suodatus Suodatusta käytetään yleensä signaalin muokkaukseen siten, että 2 poistetaan häiritsevä signaali hyötysignaalin
Katsaus suodatukseen Suodatuksen perustaa, ideaaliset suotimet, käytännön toteutuksia Suodatus Suodatusta käytetään yleensä signaalin muokkaukseen siten, että 2 poistetaan häiritsevä signaali hyötysignaalin
MATEMATIIKAN JAOS Kompleksianalyysi
 MATEMATIIKAN JAOS Kompleksianalyysi Harjoitustehtäviä, syksy 00. Määrää kompleksiluvun a) = 3 j + 3j, b) = j, + j c) = ( 3 3 3 j)( j) itseisarvo ja argumentti.. Määrää sellaiset reaaliluvut x ja y, että
MATEMATIIKAN JAOS Kompleksianalyysi Harjoitustehtäviä, syksy 00. Määrää kompleksiluvun a) = 3 j + 3j, b) = j, + j c) = ( 3 3 3 j)( j) itseisarvo ja argumentti.. Määrää sellaiset reaaliluvut x ja y, että
Dynaamisen järjestelmän siirtofunktio
 Dynaamisen järjestelmän siirtofunktio Nyt päästään soveltamaan matriisilaskentaa ja Laplace muunnosta. Tutkikaamme, miten lineaarista mallia voidaan käsitellä. Kuten edellä on jo nähty säätötekniikassa
Dynaamisen järjestelmän siirtofunktio Nyt päästään soveltamaan matriisilaskentaa ja Laplace muunnosta. Tutkikaamme, miten lineaarista mallia voidaan käsitellä. Kuten edellä on jo nähty säätötekniikassa
SGN-1200 Signaalinkäsittelyn menetelmät, Tentti
 SG-1200 Signaalinkäsittelyn menetelmät, Tentti 24.4.2006 Kirjoita nimesi ja opiskelijanumerosi jokaiseen paperiin. Vastauspaperit tullaan irrottamaan toisistaan. Jos tila ei riitä, jatka kääntöpuolelle
SG-1200 Signaalinkäsittelyn menetelmät, Tentti 24.4.2006 Kirjoita nimesi ja opiskelijanumerosi jokaiseen paperiin. Vastauspaperit tullaan irrottamaan toisistaan. Jos tila ei riitä, jatka kääntöpuolelle
2v 1 = v 2, 2v 1 + 3v 2 = 4v 2.. Vastaavasti ominaisarvoa λ 2 = 4 vastaavat ominaisvektorit toteuttavat. v 2 =
 TKK, Matematiikan laitos Pikkarainen/Tikanmäki Mat-1.1320 Matematiikan peruskurssi K2 Harjoitus 12, A=alku-, L=loppuviikko, T= taulutehtävä, P= palautettava tehtävä, W= verkkotehtävä 21. 25.4.2008, viikko
TKK, Matematiikan laitos Pikkarainen/Tikanmäki Mat-1.1320 Matematiikan peruskurssi K2 Harjoitus 12, A=alku-, L=loppuviikko, T= taulutehtävä, P= palautettava tehtävä, W= verkkotehtävä 21. 25.4.2008, viikko
Pakotettu vaimennettu harmoninen värähtelijä Resonanssi
 Pakotettu vaimennettu harmoninen värähtelijä Resonanssi Tällä luennolla tavoitteena Mikä on pakkovoiman aiheuttama vaikutus vaimennettuun harmoniseen värähtelijään? Mikä on resonanssi? Kertaus: energian
Pakotettu vaimennettu harmoninen värähtelijä Resonanssi Tällä luennolla tavoitteena Mikä on pakkovoiman aiheuttama vaikutus vaimennettuun harmoniseen värähtelijään? Mikä on resonanssi? Kertaus: energian
DI matematiikan opettajaksi: Täydennyskurssi, kevät 2010 Luentorunkoa ja harjoituksia viikolle 13: ti klo 13:00-15:30 ja to 1.4.
 DI matematiikan opettajaksi: Täydennyskurssi, kevät Luentorunkoa ja harjoituksia viikolle 3: ti 33 klo 3:-5:3 ja to 4 klo 9:5-: Käydään läpi differentiaaliyhtälöitä Määritelmä Olkoon A R n n (MatLab:ssa
DI matematiikan opettajaksi: Täydennyskurssi, kevät Luentorunkoa ja harjoituksia viikolle 3: ti 33 klo 3:-5:3 ja to 4 klo 9:5-: Käydään läpi differentiaaliyhtälöitä Määritelmä Olkoon A R n n (MatLab:ssa
1 Di erentiaaliyhtälöt
 Taloustieteen mat.menetelmät syksy 2017 materiaali II-5 1 Di erentiaaliyhtälöt 1.1 Skalaariyhtälöt Määritelmä: ensimmäisen kertaluvun di erentiaaliyhtälö on muotoa _y = F (y; t) oleva yhtälö, missä _y
Taloustieteen mat.menetelmät syksy 2017 materiaali II-5 1 Di erentiaaliyhtälöt 1.1 Skalaariyhtälöt Määritelmä: ensimmäisen kertaluvun di erentiaaliyhtälö on muotoa _y = F (y; t) oleva yhtälö, missä _y
MS-A0003/A0005 Matriisilaskenta Laskuharjoitus 2 / vko 45
 MS-A3/A5 Matriisilaskenta Laskuharjoitus 2 / vko 45 Tehtävä (L): Hahmottele kompleksitasoon ne pisteet, jotka toteuttavat a) z 2i = 2, b) z 2i < 2, c) /z
MS-A3/A5 Matriisilaskenta Laskuharjoitus 2 / vko 45 Tehtävä (L): Hahmottele kompleksitasoon ne pisteet, jotka toteuttavat a) z 2i = 2, b) z 2i < 2, c) /z
SGN Signaalinkäsittelyn perusteet Välikoe Heikki Huttunen
 SGN-11 Signaalinkäsittelyn perusteet Välikoe 3.5.16 Heikki Huttunen Laskimen käyttö sallittu. Muiden materiaalien käyttö ei sallittu. Tenttikysymyksiä ei tarvitse palauttaa. Sivuilla 1-3 on. Sivuilla 4-5
SGN-11 Signaalinkäsittelyn perusteet Välikoe 3.5.16 Heikki Huttunen Laskimen käyttö sallittu. Muiden materiaalien käyttö ei sallittu. Tenttikysymyksiä ei tarvitse palauttaa. Sivuilla 1-3 on. Sivuilla 4-5