Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C (s+1)(s+0.02) 50s+1
|
|
|
- Ilona Hovinen
- 6 vuotta sitten
- Katselukertoja:
Transkriptio
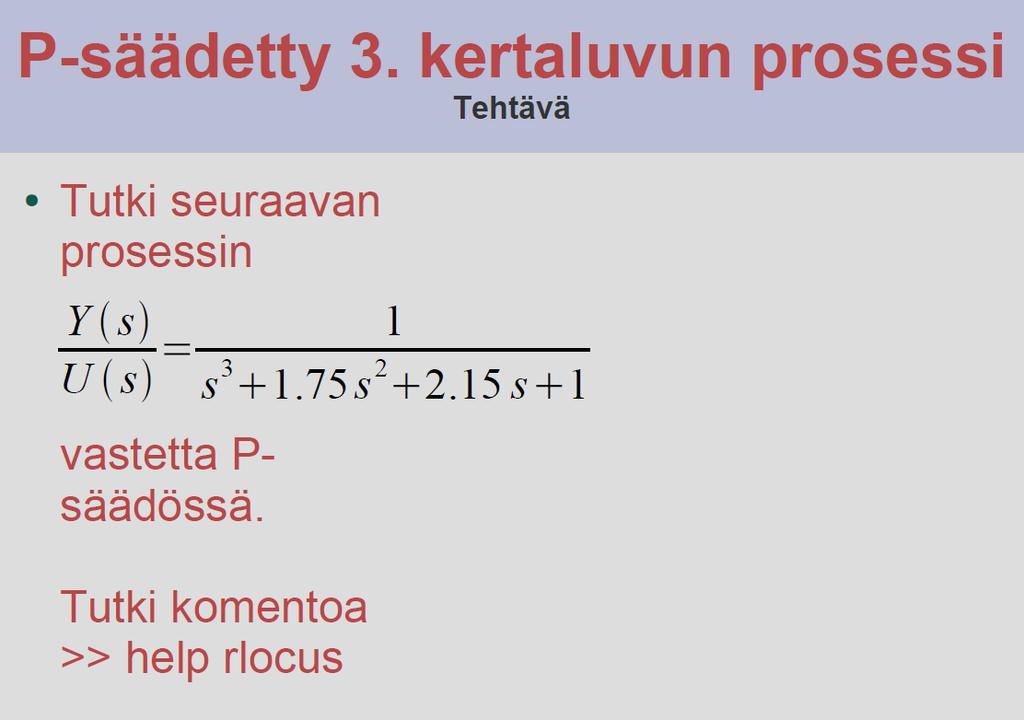
1 ENSO IKONEN PYOSYS Harjoitus (15min) Prosessia P säädetään yksikkötakaisinkytkennässä säätimellä C. 1 P(s) = (s+1)(s+0.02) C(s) = 50s s Piirrä vasteet asetusarvosta. Kommentoi säätötulosta. Piirrä vasteet kuormahäiriöstä. Kommentoi säätötulosta. Ohje: Muodosta gang-of-four siirtofunktiot, piirrä vasteet Matlabilla ja tarkastele tuloksia. (tai w) 1
2 ENSO IKONEN PYOSYS 2 Säätöjärjestelmien suunnittelu SäSu Takaisinkytketyt järjestelmät 3.3 Kuuden kopla 3.4 Esimerkkejä takaisinkytketyistä järjestelmistä 3.5 Myötäkytkentä 3.6 Napojensijoittelu juuriura 3.7 LTI-säätösuunnittelu Matlabilla (harjoituksissa) 3.4 Esimerkkejä takaisinkytketyistä järjestelmistä PID-säätö P & PI säädetty järjestelmä 3.6 Juuriura suljetun systeemin napojensijoittelu 3.5 Myötäkytkentä 3.6 Harjoituksia
 Säädin perustuu poikkeamaan P proportional I integral D derivative")
3 ENSO IKONEN PYOSYS Esimerkkejä säätöjärjestelmistä PID säätö (95% teollisuuden säätimistä) Säädin perustuu poikkeamaan P proportional I integral D derivative aikatasossa: Laplace-tasossa: Erikoistapaukset P-säätö PI-säätö PD-säätö u 1 t d t K et e d et C s U E s s I 0 D dt 1 Ds K 1 I s Ts 1
 säätömuuttuja: kuorma w(t) systeemin malli G s P-säädin W E s s C W (around c, w) s 4.")
4 P-säätö säiliön konsentraatio w ENSO IKONEN PYOSYS 4 c suljettu systeemi C C s s sp KG s 1 KG s s 1 säädetty muuttuja: konsentraatio c(t) säätömuuttuja: kuorma w(t) systeemin malli G s P-säädin W E s s C W (around c, w) s s 2.4s 1 K, E 5 s C s Cs sp
5 PI-säätö säiliön konsentraatio w ENSO IKONEN PYOSYS 5 c suljettu systeemi C C s s sp 1 K 1 G I s 1 1 K 1 G I s s s 3.84s s 6.24s 1.6 säädetty muuttuja: konsentraatio c(t) säätömuuttuja: kuorma w(t) systeemin malli G s PI-säädin W E C W s s 2.4s 1 s s K 1 1 I s 5

6 3.6.2 Juuriura (root locus) suljetun piirin navat avoimen piirin siirtofunktiosta ENSO IKONEN PYOSYS 6
7 3.6.2 Juuriura (root locus) suljetun piirin navat avoimen piirin siirtofunktiosta ENSO IKONEN PYOSYS 7
8 ENSO IKONEN PYOSYS Silmukkasiirtofunktio Katkaistaan takaisinkytkentä siirtofunktio pisteestä A pisteeseen B silmukkasiirtofunktio L(s)=C(s)P(s) C M G Esim. C G M C G M L(s) = C(s) G(s) M(s) C G

9 Juuriura parametrin K suunnittelu, ominaisuuksia ENSO IKONEN PYOSYS 9
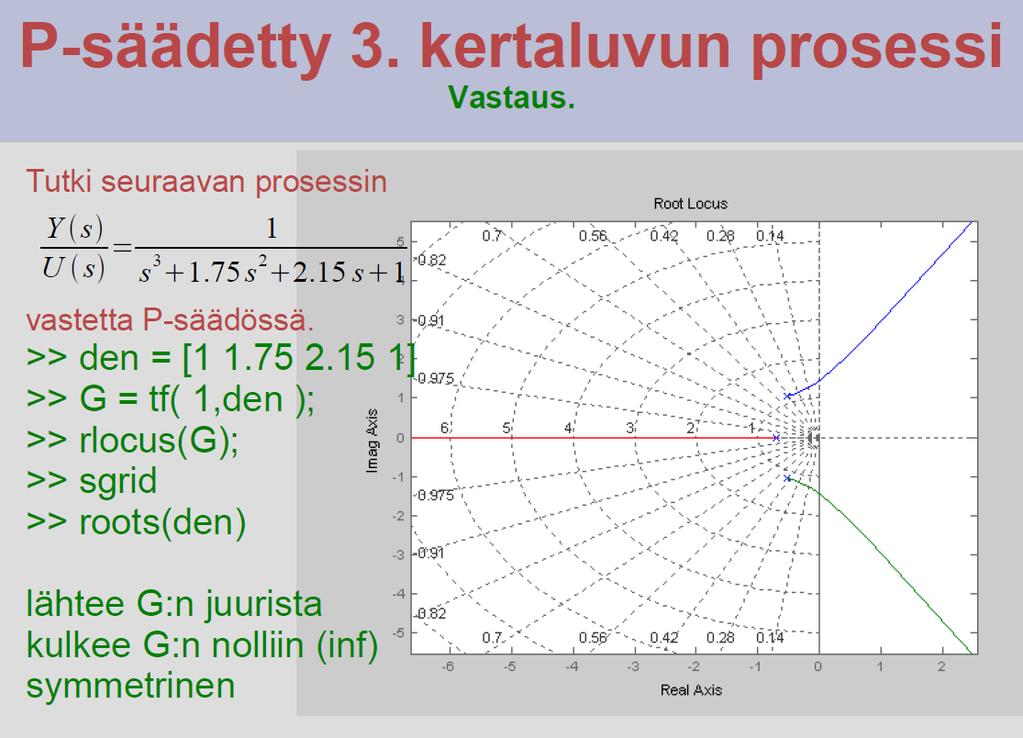
![ENSO IKONEN PYOSYS 10 G s Juuriura piirtäminen Matlabilla: rlocus s 4 12s 3 1 64s 2 128s >> G=tf(1,[1 12 64 128 0]) Transfer function: 1](/docs-images/88/116805985/images/10-0.jpg "----------------------------- s^4 + 12 s^3 + 64 s^2 + 128 s >> rlocus(g) >> sgrid >> rlocfind(g) % hae kriitt.")
10 ENSO IKONEN PYOSYS 10 G s Juuriura piirtäminen Matlabilla: rlocus s 4 12s s 2 128s >> G=tf(1,[ ]) Transfer function: s^ s^ s^ s >> rlocus(g) >> sgrid >> rlocfind(g) % hae kriitt.k >> impulse(g) >> K=500; step(k*g/(1+k*g)) simuloi K=1, K=600,
11 ENSO IKONEN PYOSYS 11
12
13
14
15
16
17
18
19
20 ENSO IKONEN PYOSYS Myötäkytkentä Takaisinkytkentä on potentiaalisesti epästabiili! Myötäkytkennällä voidaan kompensoida tunnettuja (mitattuja) häiriöitä Käyttö yhdessä takaisinkytkennän kanssa G K s s GD G s * vaatii prosessin inverssin * tarvitaan malli siitä, kuinka häiriö vaikuttaa (y/d)

21 Osoitetaan.. ENSO IKONEN PYOSYS 21
22 ENSO IKONEN PYOSYS 22 Prosessi ja häiriö G G s D s 2 20s 1 3s e 2s 1 Kompensaattorilla G K s Esimerkki Myötäkytketty säätö s s GD 1 20s 1 3s 3s e 22s 1V s 20s 1e Ds G 2 2s 1 mitatun häiriön vaikutus voidaan kokonaan poistaa. kompensaattori ode : na V ( s) D( s) sv v' s 1 e 2s 1 3s 3s 3s s V s 5se Ds e Ds 1 4 t 0.5vt 5d' t dt 3
23 ENSO IKONEN PYOSYS 23 Oppimistavoitteet Opiskelija... osaa selittää takaisinkytkennän tärkeyden myötäkytkentään verrattuna, ja robustisuuden perusteella. näkee molempien merkityksen toisiaan tukevina säädön rakenteina osaa itsenäisesti muodostaa häiriöllisen suljetun piirin ja sen siirtofunktiot sekä komponentit gang-of-six analyysiin ymmärtää napojensijoittelun periaatteen sekä osaa tulkita juuriurakuvaajaa osaa itsenäisesti määritellä suljetun piirin Matlabilla, piirtää lohkokaavion ja simuloida järjestelmää.
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / Systeemitekniikka Jan 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / Systeemitekniikka Jan 2019
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Systeemitekniikan laboratorio Jan 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Systeemitekniikan laboratorio Jan 2019
SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS),
,") SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS), 5.2.2019 Tentin arvosteluperusteita: o Kurssin alku on osin kertausta SäAn ja prosessidynamiikkakursseista, jotka oletetaan
SaSun VK1-tenttikysymyksiä 2019 Enso Ikonen, Älykkäät koneet ja järjestelmät (IMS), 5.2.2019 Tentin arvosteluperusteita: o Kurssin alku on osin kertausta SäAn ja prosessidynamiikkakursseista, jotka oletetaan
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät helmikuu 2019 ENSO IKONEN PYOSYS
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät helmikuu 2019 ENSO IKONEN PYOSYS
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / systeemitekniikka Jan 019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / systeemitekniikka Jan 019
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät, Systeemitekniikka Feb 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät, Systeemitekniikka Feb 2019
Aikatason vaste vs. siirtofunktio Tehtävä
 Aikatason vaste vs. siirtofunktio Tehtävä Millainen toisen kertaluvun siirtofunktio vastaa systeemiä jonka ylitys on 10% ja asettumisaika 4 min? Y s X s = 2 n s 2 2 2 n s n M p =e t r 1.8 n t s 4.6 n 1
Aikatason vaste vs. siirtofunktio Tehtävä Millainen toisen kertaluvun siirtofunktio vastaa systeemiä jonka ylitys on 10% ja asettumisaika 4 min? Y s X s = 2 n s 2 2 2 n s n M p =e t r 1.8 n t s 4.6 n 1
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
Osatentti
 Osatentti 2.8.205 Nimi: Opiskelijanumero: Ohjeet: Vastaa kysymyspaperiin ja kysymyksille varattuun tilaan. Laskin ei ole sallittu. Tenttikaavasto jaetaan. Kaavastoon EI merkintöjä. Palauta kaavasto tämän
Osatentti 2.8.205 Nimi: Opiskelijanumero: Ohjeet: Vastaa kysymyspaperiin ja kysymyksille varattuun tilaan. Laskin ei ole sallittu. Tenttikaavasto jaetaan. Kaavastoon EI merkintöjä. Palauta kaavasto tämän
Tietokoneavusteinen säätösuunnittelu (TASSU)
") Ohjeita ja esimerkkejä kurssin 470463A näyttökoetta varten Tietokoneavusteinen säätösuunnittelu (TASSU) Enso Ikonen 9/2006 Oulun yliopisto, Prosessi- ja ympäristötekniikan osasto, systeemitekniikan laboratorio
Ohjeita ja esimerkkejä kurssin 470463A näyttökoetta varten Tietokoneavusteinen säätösuunnittelu (TASSU) Enso Ikonen 9/2006 Oulun yliopisto, Prosessi- ja ympäristötekniikan osasto, systeemitekniikan laboratorio
Tehtävä 1. Vaihtoehtotehtävät.
 Kem-9.47 Prosessiautomaation perusteet Tentti.4. Tehtävä. Vaihtoehtotehtävät. Oikea vastaus +,5p, väärä vastaus -,5p ja ei vastausta p Maksimi +5,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA
Kem-9.47 Prosessiautomaation perusteet Tentti.4. Tehtävä. Vaihtoehtotehtävät. Oikea vastaus +,5p, väärä vastaus -,5p ja ei vastausta p Maksimi +5,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA
MATLAB harjoituksia RST-säädöstä (5h)
") Digitaalinen säätöteoria MATLAB harjoituksia RST-säädöstä (5h) Enso Ikonen Oulun yliopisto, systeemitekniikan laboratorio November 25, 2008 Harjoituskerran sisältö kertausta (15 min) Napojensijoittelu
Digitaalinen säätöteoria MATLAB harjoituksia RST-säädöstä (5h) Enso Ikonen Oulun yliopisto, systeemitekniikan laboratorio November 25, 2008 Harjoituskerran sisältö kertausta (15 min) Napojensijoittelu
3. kierros. 2. Lähipäivä
 3. kierros. Lähipäivä Viikon aihe (viikko /) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
3. kierros. Lähipäivä Viikon aihe (viikko /) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
3. kierros. 1. Lähipäivä
 3. kierros 1. Lähipäivä Viikon aihe (viikko 1/2) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
3. kierros 1. Lähipäivä Viikon aihe (viikko 1/2) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
H(s) + + _. Ymit(s) Laplace-tason esitykseksi on saatu (katso jälleen kalvot):
 + + _. Ymit(s) Laplace-tason esitykseksi on saatu (katso jälleen kalvot):") ELEC-C3 Säätötekniikka 5. laskuharjoitus Vastaukset Quiz: Luennon 4 luentokalvojen (luku 4) lopussa on esimerkki: Sähköpiiri (alkaa kalvon 39 tienoilla). Lue esimerkki huolellisesti ja vastaa seuraavaan:
ELEC-C3 Säätötekniikka 5. laskuharjoitus Vastaukset Quiz: Luennon 4 luentokalvojen (luku 4) lopussa on esimerkki: Sähköpiiri (alkaa kalvon 39 tienoilla). Lue esimerkki huolellisesti ja vastaa seuraavaan:
1 PID-taajuusvastesuunnittelun esimerkki
 Enso Ikonen, Oulun yliopisto, systeemitekniikan laboratorio 2/23 Säätöjärjestelmien suunnittelu 23 PID-taajuusvastesuunnittelun esimerkki Tehtävänä on suunnitella säätö prosessille ( ) = = ( +)( 2 + )
Enso Ikonen, Oulun yliopisto, systeemitekniikan laboratorio 2/23 Säätöjärjestelmien suunnittelu 23 PID-taajuusvastesuunnittelun esimerkki Tehtävänä on suunnitella säätö prosessille ( ) = = ( +)( 2 + )
Y (s) = G(s)(W (s) W 0 (s)). Tarkastellaan nyt tilannetta v(t) = 0, kun t < 3 ja v(t) = 1, kun t > 3. u(t) = K p y(t) K I
 = G(s)(W (s) W 0 (s)). Tarkastellaan nyt tilannetta v(t) = 0, kun t < 3 ja v(t) = 1, kun t > 3. u(t) = K p y(t) K I") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 6. harjoituksen ratkaisut. Laplace-tasossa saadaan annetulle venttiilille W (s) W (s)
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 6. harjoituksen ratkaisut. Laplace-tasossa saadaan annetulle venttiilille W (s) W (s)
Säätötekniikkaa. Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla
 ohjaus, joka saa systeemin toimimaan halutulla tavalla") Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Automaatiotekniikan laskentatyökalut (ALT)
") Ohjeita ja esimerkkejä kurssin 477604S näyttökoetta varten Automaatiotekniikan laskentatyökalut (ALT) Enso Ikonen 6/2008 Oulun yliopisto, Prosessi- ja ympäristötekniikan osasto, systeemitekniikan laboratorio
Ohjeita ja esimerkkejä kurssin 477604S näyttökoetta varten Automaatiotekniikan laskentatyökalut (ALT) Enso Ikonen 6/2008 Oulun yliopisto, Prosessi- ja ympäristötekniikan osasto, systeemitekniikan laboratorio
Järjestelmien kokoaminen osasysteemeistä. ELEC-C1230 Säätötekniikka. Lohkokaaviomuunnokset: Signaalit. Signaalin kulkeminen lohkon läpi
 Järjestelmien kokoaminen osasysteemeistä ELEC-C1230 Säätötekniikka Luku 4: Lohkokaaviomuunnokset, PID-säädin ja kompensaattorit, Edellisillä luennoilla on tarkasteltu yksittäisiä ilmiöitä ja niiden malleja
Järjestelmien kokoaminen osasysteemeistä ELEC-C1230 Säätötekniikka Luku 4: Lohkokaaviomuunnokset, PID-säädin ja kompensaattorit, Edellisillä luennoilla on tarkasteltu yksittäisiä ilmiöitä ja niiden malleja
Säätötekniikkaa. Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla
 ohjaus, joka saa systeemin toimimaan halutulla tavalla") Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
ELEC-C1230 Säätötekniikka
 Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
ELEC-C1230 Säätötekniikka
 Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
Harjoitus 6: Simulink - Säätöteoria. Syksy 2006. Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1
 Harjoitus 6: Simulink - Säätöteoria Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen säätötekniikkaan Takaisinkytkennän
Harjoitus 6: Simulink - Säätöteoria Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen säätötekniikkaan Takaisinkytkennän
Säätötekniikan matematiikan verkkokurssi, Matlab tehtäviä ja vastauksia 29.7.2002
 Matlab tehtäviä 1. Muodosta seuraavasta differentiaaliyhtälöstä siirtofuntio. Tämä differentiaaliyhtälö saattaisi kuvata esimerkiksi yksinkertaista vaimennettua jousi-massa systeemiä, johon on liitetty
Matlab tehtäviä 1. Muodosta seuraavasta differentiaaliyhtälöstä siirtofuntio. Tämä differentiaaliyhtälö saattaisi kuvata esimerkiksi yksinkertaista vaimennettua jousi-massa systeemiä, johon on liitetty
ELEC-C1230 Säätötekniikka. Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit
 ELEC-C3 Säätötekniikka Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit Hyvyyskriteerit Aikaisemmilla luennoilla on havainnollistettu, miten systeemien
ELEC-C3 Säätötekniikka Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit Hyvyyskriteerit Aikaisemmilla luennoilla on havainnollistettu, miten systeemien
Hyvyyskriteerit. ELEC-C1230 Säätötekniikka. Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit
 Hyvyyskriteerit ELEC-C1230 Säätötekniikka Aikaisemmilla luennoilla on havainnollistettu, miten systeemien käyttäytymiseen voi vaikuttaa säätämällä niitä. Epästabiileista systeemeistä saadaan stabiileja,
Hyvyyskriteerit ELEC-C1230 Säätötekniikka Aikaisemmilla luennoilla on havainnollistettu, miten systeemien käyttäytymiseen voi vaikuttaa säätämällä niitä. Epästabiileista systeemeistä saadaan stabiileja,
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
ENSO IKONEN PYOSYS SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät helmikuu
Osatentti
 Osatentti 3 1.4.016 Nimi: Opiskelijanumero: Ohjeet: Kirjoita vastaukset paperissa annettuun tilaan. Lisävastaustilaa on paperin lopussa. Käytä selvää käsialaa. Laskin EI ole sallittu. Tenttikaavasto jaetaan.
Osatentti 3 1.4.016 Nimi: Opiskelijanumero: Ohjeet: Kirjoita vastaukset paperissa annettuun tilaan. Lisävastaustilaa on paperin lopussa. Käytä selvää käsialaa. Laskin EI ole sallittu. Tenttikaavasto jaetaan.
Hakkuritehola hteet Janne Askola Jari-Matti Hannula Jonas Nordfors Joni Kurvinen Semu Mäkinen
 Hakkuritehola hteet 4.5.2012 Janne Askola Jari-Matti Hannula Jonas Nordfors Joni Kurvinen Semu Mäkinen Fysikaalinen toiminta Buck-Boost -hakkuriteholähde on DC/DC -muunnin. Se on yhdistelmä Buck- ja Boost
Hakkuritehola hteet 4.5.2012 Janne Askola Jari-Matti Hannula Jonas Nordfors Joni Kurvinen Semu Mäkinen Fysikaalinen toiminta Buck-Boost -hakkuriteholähde on DC/DC -muunnin. Se on yhdistelmä Buck- ja Boost
2. kierros. 1. Lähipäivä
 2. kierros. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 + 4 tuntia Tavoitteet: tietää Yhden navan vasteen ekvivalentti
2. kierros. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 + 4 tuntia Tavoitteet: tietää Yhden navan vasteen ekvivalentti

PID-sa a timen viritta minen Matlabilla ja simulinkilla
 PID-sa a timen viritta minen Matlabilla ja simulinkilla Kriittisen värähtelyn menetelmä Tehtiin kuvan 1 mukainen tasavirtamoottorin piiri PID-säätimellä. Virittämistä varten PID-säätimen ja asetettiin
PID-sa a timen viritta minen Matlabilla ja simulinkilla Kriittisen värähtelyn menetelmä Tehtiin kuvan 1 mukainen tasavirtamoottorin piiri PID-säätimellä. Virittämistä varten PID-säätimen ja asetettiin
8. kierros. 1. Lähipäivä
 8. kierros 1. Lähipäivä Viikon aihe Tilaestimointi Tilasäätö Saavutettavuus, ohjattavuus Tarkkailtavuus, havaittavuus Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 tuntia Tavoitteet: tietää Saavutettavuus
8. kierros 1. Lähipäivä Viikon aihe Tilaestimointi Tilasäätö Saavutettavuus, ohjattavuus Tarkkailtavuus, havaittavuus Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 tuntia Tavoitteet: tietää Saavutettavuus
Tilaesityksen hallinta ja tilasäätö. ELEC-C1230 Säätötekniikka. Luku 6: Tilasäätö, tilaestimointi, saavutettavuus ja tarkkailtavuus
 Tilaesityksen hallinta ja tilasäätö ELEC-C1230 Säätötekniikka Luku 6: Tilasäätö, tilaestimointi, saavutettavuus ja tarkkailtavuus Edellisessä luvussa tarkasteltiin napoja ja nollia sekä niiden vaikutuksia
Tilaesityksen hallinta ja tilasäätö ELEC-C1230 Säätötekniikka Luku 6: Tilasäätö, tilaestimointi, saavutettavuus ja tarkkailtavuus Edellisessä luvussa tarkasteltiin napoja ja nollia sekä niiden vaikutuksia
Säätötekniikan alkeita
 Säätötekniikan alkeita Säätötekniikan avulla pyritään ohjaamaan erilaisia i i järjestelmiäj älyä sisältävällä menetelmällä. Tavoitteena on saada systeemi käyttäytymään halutulla tavalla luotettavasti,
Säätötekniikan alkeita Säätötekniikan avulla pyritään ohjaamaan erilaisia i i järjestelmiäj älyä sisältävällä menetelmällä. Tavoitteena on saada systeemi käyttäytymään halutulla tavalla luotettavasti,
RAPORTTI Eemil Tamminen Markus Virtanen Pasi Vähämartti Säätötekniikan harjoitustyö Joulukuu 2007
 RAPORTTI Eemil Tamminen Markus Virtanen Pasi Vähämartti Säätötekniikan harjoitustyö Joulukuu 2007 Automaatiotekniikka Lähtöarvot: Säiliö T1: A = 500 x 600 mm, h = 500 mm Säiliö T2: Ø = 240 mm, h = 1000
RAPORTTI Eemil Tamminen Markus Virtanen Pasi Vähämartti Säätötekniikan harjoitustyö Joulukuu 2007 Automaatiotekniikka Lähtöarvot: Säiliö T1: A = 500 x 600 mm, h = 500 mm Säiliö T2: Ø = 240 mm, h = 1000
ELEC-C1230 Säätötekniikka. Luku 10: Digitaalinen säätö, perusteet, jatkuu
 ELEC-C230 Säätötekniikka Luku 0: Digitaalinen säätö, perusteet, jatkuu Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä r(tk) _ e(tk) Säädin u(tk) D/A u(t) Prosessi y(t) A/D y(tk)
ELEC-C230 Säätötekniikka Luku 0: Digitaalinen säätö, perusteet, jatkuu Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä r(tk) _ e(tk) Säädin u(tk) D/A u(t) Prosessi y(t) A/D y(tk)
4. kierros. 1. Lähipäivä
 4. kierros 1. Lähipäivä Viikon aihe Taajuuskompensointi, operaatiovahvistin ja sen kytkennät Taajuuskompensaattorit Mitoitus Kontaktiopetusta: 8 h Kotitehtäviä: 4 h + 0 h Tavoitteet: tietää Operaatiovahvistimen
4. kierros 1. Lähipäivä Viikon aihe Taajuuskompensointi, operaatiovahvistin ja sen kytkennät Taajuuskompensaattorit Mitoitus Kontaktiopetusta: 8 h Kotitehtäviä: 4 h + 0 h Tavoitteet: tietää Operaatiovahvistimen
LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi. Servokäyttö (0,9 op)
") LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi Servokäyttö (0,9 op) JOHDNTO Työssä tarkastellaan kestomagnetoitua tasavirtamoottoria. oneelle viritetään PI-säätäjä
LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi Servokäyttö (0,9 op) JOHDNTO Työssä tarkastellaan kestomagnetoitua tasavirtamoottoria. oneelle viritetään PI-säätäjä
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS SÄÄÖJÄRJESELMIEN SUUNNIELU Enso Ionen professori säätö- ja ssteemiteniia http://cc.oulu.fi/~io Oulun liopisto Äläät oneet ja järjestelmät helmiuu 209 ENSO IKONEN PYOSYS 2 Oppimistavoitteet
ENSO IKONEN PYOSYS SÄÄÖJÄRJESELMIEN SUUNNIELU Enso Ionen professori säätö- ja ssteemiteniia http://cc.oulu.fi/~io Oulun liopisto Äläät oneet ja järjestelmät helmiuu 209 ENSO IKONEN PYOSYS 2 Oppimistavoitteet
Dynaamisten systeemien teoriaa. Systeemianalyysilaboratorio II
 Dynaamisten systeemien teoriaa Systeemianalyysilaboratorio II 15.11.2017 Vakiot, sisäänmenot, ulostulot ja häiriöt Mallin vakiot Systeemiparametrit annettuja vakioita, joita ei muuteta; esim. painovoiman
Dynaamisten systeemien teoriaa Systeemianalyysilaboratorio II 15.11.2017 Vakiot, sisäänmenot, ulostulot ja häiriöt Mallin vakiot Systeemiparametrit annettuja vakioita, joita ei muuteta; esim. painovoiman
Taajuustason tekniikat: Boden ja Nyquistin diagrammit, kompensaattorien suunnittelu. Vinkit 1 a
 ELEC-C3 Säätötekniikka 9. laskuharjoitus Taajuustason tekniikat: Boden ja Nyquistin diagrammit, kompensaattorien suunnittelu Vinkit a 3. Vaiheenjättökompensaattorin siirtofunktio: ( ) s W LAG s, a. s Vahvistus
ELEC-C3 Säätötekniikka 9. laskuharjoitus Taajuustason tekniikat: Boden ja Nyquistin diagrammit, kompensaattorien suunnittelu Vinkit a 3. Vaiheenjättökompensaattorin siirtofunktio: ( ) s W LAG s, a. s Vahvistus
Harjoitus 7: Dynaamisten systeemien säätö (Simulink)
") Harjoitus 7: Dynaamisten systeemien säätö (Simulink) MS-C2107 Sovelletun matematiikan tietokonetyöt MS-C2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Dynaamisten (=ajassakehittyvien)
Harjoitus 7: Dynaamisten systeemien säätö (Simulink) MS-C2107 Sovelletun matematiikan tietokonetyöt MS-C2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Dynaamisten (=ajassakehittyvien)
Säätötekniikan perusteet. Merja Mäkelä 3.3.2003 KyAMK
 Säätötekniikan perusteet Merja Mäkelä 3.3.2003 KyAMK Johdanto Instrumentointi automaation osana teollisuusprosessien hallinnassa Mittalaitteet - säätimet - toimiyksiköt Paperikoneella 500-1000 mittaus-,
Säätötekniikan perusteet Merja Mäkelä 3.3.2003 KyAMK Johdanto Instrumentointi automaation osana teollisuusprosessien hallinnassa Mittalaitteet - säätimet - toimiyksiköt Paperikoneella 500-1000 mittaus-,
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 16.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinetiikka (Kirjan luvut 12.6, 13.1-13.3 ja 17.3) Oppimistavoitteet Ymmärtää, miten Newtonin toisen lain
KJR-C1001 Statiikka ja dynamiikka Luento 16.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinetiikka (Kirjan luvut 12.6, 13.1-13.3 ja 17.3) Oppimistavoitteet Ymmärtää, miten Newtonin toisen lain
Kon Hydraulijärjestelmät
 Kon-41.4040 Hydraulijärjestelmät Laboratorioharjoitus 2: Sähköhydraulisen järjestelmän säätö Jyri Juhala Jyrki Kajaste (Heikki Kauranne) Hydraulijärjestelmän venttiilin ohjausmenetelmät Ohjaus Kompensointi
Kon-41.4040 Hydraulijärjestelmät Laboratorioharjoitus 2: Sähköhydraulisen järjestelmän säätö Jyri Juhala Jyrki Kajaste (Heikki Kauranne) Hydraulijärjestelmän venttiilin ohjausmenetelmät Ohjaus Kompensointi
Lämpötilan säätö. S Elektroniset mittaukset Mikko Puranen Luennon sisältö
 Lämpötilan säätö S-108.2010 Elektroniset mittaukset Mikko Puranen 20.2.2006 Luennon sisältö 1. Termodynaaminen malli 2. Jäähdytyksen suunnittelu 3. Peltier-elementit 4. Lämpötilasäätäjät PID-säädin Termodynaaminen
Lämpötilan säätö S-108.2010 Elektroniset mittaukset Mikko Puranen 20.2.2006 Luennon sisältö 1. Termodynaaminen malli 2. Jäähdytyksen suunnittelu 3. Peltier-elementit 4. Lämpötilasäätäjät PID-säädin Termodynaaminen
z muunnos ja sen soveltaminen LTI järjestelmien analysointiin
 z muunnos ja sen soveltaminen LTI järjestelmien analysointiin muunnoksella (eng. transform) on vastaava asema diskreettiaikaisten signaalien ja LTI järjestelmien analyysissä kuin Laplace muunnoksella jatkuvaaikaisten
z muunnos ja sen soveltaminen LTI järjestelmien analysointiin muunnoksella (eng. transform) on vastaava asema diskreettiaikaisten signaalien ja LTI järjestelmien analyysissä kuin Laplace muunnoksella jatkuvaaikaisten
Harjoitus 7: Dynaamisten systeemien säätö (Simulink)
") Harjoitus 7: Dynaamisten systeemien säätö (Simulink) MS-C2107 Sovelletun matematiikan tietokonetyöt MS-C2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Dynaamisten (=ajassa kehittyvien)
Harjoitus 7: Dynaamisten systeemien säätö (Simulink) MS-C2107 Sovelletun matematiikan tietokonetyöt MS-C2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Dynaamisten (=ajassa kehittyvien)
Dynaamisten systeemien identifiointi 1/2
 Dynaamisten systeemien identifiointi 1/2 Mallin rakentaminen mittausten avulla Epäparametriset menetelmät: tuloksena malli, joka ei perustu parametreille impulssi-, askel- tai taajusvaste siirtofunktion
Dynaamisten systeemien identifiointi 1/2 Mallin rakentaminen mittausten avulla Epäparametriset menetelmät: tuloksena malli, joka ei perustu parametreille impulssi-, askel- tai taajusvaste siirtofunktion
Lisämateriaalia: tilayhtälön ratkaisu, linearisointi. Matriisimuuttujan eksponenttifunktio:
 Lisämateriaalia: tilayhtälön ratkaisu, linearisinti Matriisimuuttujan ekspnenttifunkti: Kun A n neliömatriisi, niin määritellään 1 1 1 e I ta t A t A t A 2 6 i! At 2 2 3 3 i i jnka vidaan tdistaa knvergivan
Lisämateriaalia: tilayhtälön ratkaisu, linearisinti Matriisimuuttujan ekspnenttifunkti: Kun A n neliömatriisi, niin määritellään 1 1 1 e I ta t A t A t A 2 6 i! At 2 2 3 3 i i jnka vidaan tdistaa knvergivan
2. kierros. 2. Lähipäivä
 2. kierros 2. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Tavoitteet: tietää Yhden navan vasteen ekvivalentti kohinakaistaleveys Vastuksen terminen kohina Termit
2. kierros 2. Lähipäivä Viikon aihe Vahvistimet, kohina, lineaarisuus Siirtofunktiot, tilaesitys Tavoitteet: tietää Yhden navan vasteen ekvivalentti kohinakaistaleveys Vastuksen terminen kohina Termit
Y Yhtälöparista ratkaistiin vuorotellen siirtofunktiot laittamalla muut tulot nollaan. = K K K M. s 2 3s 2 KK P
 Säädön kotitehtävä vk3 t. 1 a) { Y =G K P E H E=R K N N G M Y Yhtälöparista ratkaistiin vuorotellen siirtofunktiot laittamalla muut tulot nollaan. G R s = Y R = GK P s 1 = KK 1 GK P K N G P M s 2 3s 2
Säädön kotitehtävä vk3 t. 1 a) { Y =G K P E H E=R K N N G M Y Yhtälöparista ratkaistiin vuorotellen siirtofunktiot laittamalla muut tulot nollaan. G R s = Y R = GK P s 1 = KK 1 GK P K N G P M s 2 3s 2
ELEC-C1230 Säätötekniikka
 Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
Johdanto: Digitaalinen (diskreetti, diskreettiaikainen) säätöjärjestelmä ELEC-C1230 Säätötekniikka Luku 10: Digitaalinen säätö, perusteet, jatkuu A/D-muunnoksessa analoginen signaali näytteistetään (sampling);
Harjoitus 5: Simulink
 Harjoitus 5: Simulink Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen Simulinkiin Differentiaaliyhtälöiden
Harjoitus 5: Simulink Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tutustuminen Simulinkiin Differentiaaliyhtälöiden
Mat Systeemien identifiointi, aihepiirit 1/4
 , aihepiirit 1/4 Dynaamisten systeemien matemaattinen mallintaminen ja analyysi Matlab (System Identification Toolbox), Simulink 1. Matemaattinen mallintaminen: Mallintamisen ja mallin määritelmät Fysikaalinen
, aihepiirit 1/4 Dynaamisten systeemien matemaattinen mallintaminen ja analyysi Matlab (System Identification Toolbox), Simulink 1. Matemaattinen mallintaminen: Mallintamisen ja mallin määritelmät Fysikaalinen
Missä mennään. systeemi. identifiointi. mallikandidaatti. validointi. malli. (fysikaalinen) mallintaminen. mallin mallin käyttötarkoitus, reunaehdot
 mallintaminen. mallin mallin käyttötarkoitus, reunaehdot") Missä mennään systeemi mallin mallin käyttötarkoitus, reunaehdot käyttö- (fysikaalinen) mallintaminen luonnonlait yms. yms. identifiointi kokeita kokeita + päättely päättely vertailu mallikandidaatti validointi
Missä mennään systeemi mallin mallin käyttötarkoitus, reunaehdot käyttö- (fysikaalinen) mallintaminen luonnonlait yms. yms. identifiointi kokeita kokeita + päättely päättely vertailu mallikandidaatti validointi
Agenda. Johdanto Säätäjiä. Mittaaminen. P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen
 8. Luento: Laitteiston ohjaaminen Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen Johdanto Tavoitteena: tunnistaa
8. Luento: Laitteiston ohjaaminen Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen Johdanto Tavoitteena: tunnistaa
8. kierros. 2. Lähipäivä
 8. kierros 2. Lähipäivä Viikon aihe Tilaestimointi Tilasäätö Saavutettavuus, ohjattavuus Tarkkailtavuus, havaittavuus Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 tuntia Tavoitteet: tietää Saavutettavuus
8. kierros 2. Lähipäivä Viikon aihe Tilaestimointi Tilasäätö Saavutettavuus, ohjattavuus Tarkkailtavuus, havaittavuus Mitoitus Kontaktiopetusta: 8 tuntia Kotitehtäviä: 4 tuntia Tavoitteet: tietää Saavutettavuus
Moottorin säätö. Miikka Ihonen 67367P Sampo Salo 79543L Kalle Spoof 83912K John Boström 83962B Venla Viitanen 84514C
 Moottorin säätö Miikka Ihonen 67367P Sampo Salo 79543L Kalle Spoof 83912K John Boström 83962B Venla Viitanen 84514C Tehtävän määrittely Tehtävän aiheena on moottorin tyhjäkäynnin säätö. Tehtävässä tulee
Moottorin säätö Miikka Ihonen 67367P Sampo Salo 79543L Kalle Spoof 83912K John Boström 83962B Venla Viitanen 84514C Tehtävän määrittely Tehtävän aiheena on moottorin tyhjäkäynnin säätö. Tehtävässä tulee
Luentokalvot lämpötilasäätimistä Elektroniset mittaukset-kurssiin
 TEKNILLINEN KORKEAKOULU Sähkö- ja tietoliikennetekniikan osasto MIKES TKK Mittaustekniikka Luentokalvot lämpötilasäätimistä Elektroniset mittaukset-kurssiin 1.3.2006 DI Mikko Puranen Mittaustekniikan erikoistyö
TEKNILLINEN KORKEAKOULU Sähkö- ja tietoliikennetekniikan osasto MIKES TKK Mittaustekniikka Luentokalvot lämpötilasäätimistä Elektroniset mittaukset-kurssiin 1.3.2006 DI Mikko Puranen Mittaustekniikan erikoistyö
Suhteellisuusteorian perusteet 2017
 Suhteellisuusteorian perusteet 017 Harjoitus 5 esitetään laskuharjoituksissa viikolla 17 1. Tarkastellaan avaruusaikaa, jossa on vain yksi avaruusulottuvuus x. Nollasta poikkeavat metriikan komponentit
Suhteellisuusteorian perusteet 017 Harjoitus 5 esitetään laskuharjoituksissa viikolla 17 1. Tarkastellaan avaruusaikaa, jossa on vain yksi avaruusulottuvuus x. Nollasta poikkeavat metriikan komponentit
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
ELEC-C1230 Säätötekniikka. Luku 7: Taajuusanalyysi
 ELEC-C123 Säätötekniikka Luku 7: Taajuusanalyysi Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
ELEC-C123 Säätötekniikka Luku 7: Taajuusanalyysi Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
Elektroniikka, kierros 3
 Elektroniikka, kierros 3 1. a) Johda kuvan 1 esittämän takaisinkytketyn systeemin suljetun silmukan vahvistuksen f lauseke. b) Osoita, että kun silmukkavahvistus β 1, niin suljetun silmukan vahvistus f
Elektroniikka, kierros 3 1. a) Johda kuvan 1 esittämän takaisinkytketyn systeemin suljetun silmukan vahvistuksen f lauseke. b) Osoita, että kun silmukkavahvistus β 1, niin suljetun silmukan vahvistus f
Y (z) = z-muunnos on lineaarinen kuten Laplace-muunnoskin
 = z-muunnos on lineaarinen kuten Laplace-muunnoskin") Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 3. harjoituksen ratkaisut. Vapaan vasteen löytämiseksi asetetaan ohjaukseksi u(t)
Aalto-yliopiston Perustieteiden korkeakoulu Matematiikan ja systeemianalyysin laitos Mat-2.429 Systeemien Identifiointi 3. harjoituksen ratkaisut. Vapaan vasteen löytämiseksi asetetaan ohjaukseksi u(t)
Tehtävä 1. Vaihtoehtotehtävät.
 Kem-9.7 Proeiautomaation peruteet Perutehtävät Tentti 9.. Tehtävä. Vaihtoehtotehtävät. Oikea vatau,p, väärä vatau -,p ja ei vatauta p Makimi,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA TENTIN
Kem-9.7 Proeiautomaation peruteet Perutehtävät Tentti 9.. Tehtävä. Vaihtoehtotehtävät. Oikea vatau,p, väärä vatau -,p ja ei vatauta p Makimi,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA TENTIN
Laplace-muunnos: määritelmä
 Laplace-muunnos: määritelmä Olkoon f : [, [ R funktio. Funktion f Laplacen muunnos määritellään yhtälöllä F(s) = L(f) := f(t)e st dt edellyttäen, että integraali f(t)e st dt suppenee. Riittävä ehto integraalin
Laplace-muunnos: määritelmä Olkoon f : [, [ R funktio. Funktion f Laplacen muunnos määritellään yhtälöllä F(s) = L(f) := f(t)e st dt edellyttäen, että integraali f(t)e st dt suppenee. Riittävä ehto integraalin
Harjoitus 1. Tehtävä 1. Malliratkaisut. f(t) = e (t α) cos(ω 0 t + β) L[f(t)] = f(t)e st dt = e st t+α cos(ω 0 t + β)dt.
![Harjoitus 1. Tehtävä 1. Malliratkaisut. f(t) = e (t α) cos(ω 0 t + β) L[f(t)] = f(t)e st dt = e st t+α cos(ω 0 t + β)dt.](/thumbs/95/125776102.jpg "Harjoitus 1. Tehtävä 1. Malliratkaisut. f(t) = e (t α) cos(ω 0 t + β) L[f(t)] = f(t)e st dt = e st t+α cos(ω 0 t + β)dt.") Harjoitus Malliratkaisut Tehtävä L[f(t)] ˆ f(t) e (t α) cos(ω t + β) f(t)e st dt ˆ e st t+α cos(ω t + β)dt cos(ω t + β) 2 (ej(ωt+β) + e j(ωt+β) ) L[f(t)] 2 eα 2 ˆ ˆ e st t+α (e j(ω t+β) + e j(ω t+β) )
Harjoitus Malliratkaisut Tehtävä L[f(t)] ˆ f(t) e (t α) cos(ω t + β) f(t)e st dt ˆ e st t+α cos(ω t + β)dt cos(ω t + β) 2 (ej(ωt+β) + e j(ωt+β) ) L[f(t)] 2 eα 2 ˆ ˆ e st t+α (e j(ω t+β) + e j(ω t+β) )
AS-74.2111 Analoginen säätö. Luento 1: Johdanto, dynaamiset mallit ja rakenteet, lohkokaaviot, säädön periaatteet
 AS-74.2111 Analoginen säätö Luento 1: Johdanto, dynaamiset mallit ja rakenteet, lohkokaaviot, säädön periaatteet Mitä säätötekniikka on? Control Systems Engineering Laaja näkemys: Systeemien sekä niiden
AS-74.2111 Analoginen säätö Luento 1: Johdanto, dynaamiset mallit ja rakenteet, lohkokaaviot, säädön periaatteet Mitä säätötekniikka on? Control Systems Engineering Laaja näkemys: Systeemien sekä niiden
S SÄHKÖTEKNIIKKA JA ELEKTRONIIKKA
 S-55.00 SÄHKÖTKNIIKKA JA KTONIIKKA Tentti 9..006: tehtävät,3,5,7,9. välikoe: tehtävät,,3,4,5. välikoe: tehtävät 6,7,8,9,0 Saat vastata vain neljään tehtävään/koe; ne sinun pitää itse valita! Kimmo Silvonen.
S-55.00 SÄHKÖTKNIIKKA JA KTONIIKKA Tentti 9..006: tehtävät,3,5,7,9. välikoe: tehtävät,,3,4,5. välikoe: tehtävät 6,7,8,9,0 Saat vastata vain neljään tehtävään/koe; ne sinun pitää itse valita! Kimmo Silvonen.
SIMULINK 5.0 Harjoitus. Matti Lähteenmäki 2004 www.tpu.fi/~mlahteen/
 SIMULINK 5.0 Harjoitus 2004 www.tpu.fi/~mlahteen/ SIMULINK 5.0 Harjoitus 2 Harjoitustehtävä. Tarkastellaan kuvan mukaisen yhden vapausasteen jousi-massa-vaimennin systeemin vaakasuuntaista pakkovärähtelyä,
SIMULINK 5.0 Harjoitus 2004 www.tpu.fi/~mlahteen/ SIMULINK 5.0 Harjoitus 2 Harjoitustehtävä. Tarkastellaan kuvan mukaisen yhden vapausasteen jousi-massa-vaimennin systeemin vaakasuuntaista pakkovärähtelyä,
Analogiapiirit III. Keskiviikko 4.12.2002, klo. 12.15-14.00, TS128. Operaatiovahvistinrakenteet
 Oulun yliopisto Sähkötekniikan osasto Analogiapiirit III Harjoitus 2. Keskiviikko 4.12.2002, klo. 12.15-14.00, TS128. Operaatiovahvistinrakenteet 1. Analysoi kuvan 1 operaatiotranskonduktanssivahvistimen
Oulun yliopisto Sähkötekniikan osasto Analogiapiirit III Harjoitus 2. Keskiviikko 4.12.2002, klo. 12.15-14.00, TS128. Operaatiovahvistinrakenteet 1. Analysoi kuvan 1 operaatiotranskonduktanssivahvistimen
Esimerkki: Laaduntasaussäiliö. Esimerkki: Laaduntasaussäiliö. Taajuusanalyysi. ELEC-C1230 Säätötekniikka. Luku 7: Taajuusanalyysi
 Taajuusanalyysi ELEC-C1230 Säätötekniikka Luku 7: Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
Taajuusanalyysi ELEC-C1230 Säätötekniikka Luku 7: Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
Systeemin käyttäytyminen. ELEC-C1230 Säätötekniikka. Systeemin navat ja nollat. Systeemin navat ja nollat
 Systeemin käyttäytyminen ELEC-C1230 Säätötekniikka Luku 5: Navat ja nollat, systeemin nopeus, stabiilisuus ja värähtelyt, Routh-Hurwitz-kriteeri Systeemin tai järjestelmän tärkein ominaisuus on stabiilisuus.
Systeemin käyttäytyminen ELEC-C1230 Säätötekniikka Luku 5: Navat ja nollat, systeemin nopeus, stabiilisuus ja värähtelyt, Routh-Hurwitz-kriteeri Systeemin tai järjestelmän tärkein ominaisuus on stabiilisuus.
Esimerkki: Laaduntasaussäiliö. Esimerkki: Laaduntasaussäiliö. Taajuusanalyysi. ELEC-C1230 Säätötekniikka. Luku 7: Taajuusanalyysi
 Taajuusanalyysi ELEC-C1230 Säätötekniikka Luku 7: Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
Taajuusanalyysi ELEC-C1230 Säätötekniikka Luku 7: Taajuusanalyysi Aikaisemmilla luennoilla on tarkasteltu systeemien käyttäytymistä aikatasossa (differentiaaliyhtälöt, herätteet ja vasteet) tai Laplace-tasossa
Boost-hakkuri. Hakkurin tilaesitykset
 Boost-hakkuri Boost-hakkurilla on toiminnassaan kaksi tilaa. Päällä, jolloin kytkimestä virtapiiri on suljettu ja pois silloin kun virtapiiri on kytkimestä aukaistu. Kummallekin tilalle tulee muodostaa
Boost-hakkuri Boost-hakkurilla on toiminnassaan kaksi tilaa. Päällä, jolloin kytkimestä virtapiiri on suljettu ja pois silloin kun virtapiiri on kytkimestä aukaistu. Kummallekin tilalle tulee muodostaa
Identifiointiprosessi
 Identifiointiprosessi Koesuunnittelu Identifiointikoe Datan esikäsittely Mallirakenteen valinta Parametrien estimointi Diagnostiset testit Mallin validointi Mallin käyttö & ylläpito Identifiointi- ja simulointiohjelmistoja
Identifiointiprosessi Koesuunnittelu Identifiointikoe Datan esikäsittely Mallirakenteen valinta Parametrien estimointi Diagnostiset testit Mallin validointi Mallin käyttö & ylläpito Identifiointi- ja simulointiohjelmistoja
Luento 7. Järjestelmien kokoaminen osista
 Luento 7 Lineaaristen järjestelmien analyysi Järjestelmä yhdistelmät, takaisinkytkentä Taajuusvaste Stabiilisuus analyysi taajuustasossa 8..6 Järjestelmien kokoaminen osista Lineaaristen järjestelmien
Luento 7 Lineaaristen järjestelmien analyysi Järjestelmä yhdistelmät, takaisinkytkentä Taajuusvaste Stabiilisuus analyysi taajuustasossa 8..6 Järjestelmien kokoaminen osista Lineaaristen järjestelmien
FORD RANGER _Ranger_2015.5_COVER_V2.indd /08/ :39:54
 FORD RANGER 2 3 4 5 1.8 m3 6 7 8 9 10 11 3 7 8 5 1 2 4 6 9 10 12 13 3500kg 14 15 16 17 18 19 20 21 22 23 24 25 26 28 28 29 29 30 [Nm] 475 450 425 400 375 [kw] [PS] 180 245 165 224 150 204 135 184 31 350
FORD RANGER 2 3 4 5 1.8 m3 6 7 8 9 10 11 3 7 8 5 1 2 4 6 9 10 12 13 3500kg 14 15 16 17 18 19 20 21 22 23 24 25 26 28 28 29 29 30 [Nm] 475 450 425 400 375 [kw] [PS] 180 245 165 224 150 204 135 184 31 350
MASSASÄILIÖN SIMULOINTI JA SÄÄTÖ Simulation and control of pulp tank
 MASSASÄILIÖN SIMULOINTI JA SÄÄTÖ Simulation and control of pulp tank Sonja Lindman Kandidaatintyö 10.4.2014 LUT Energia Sähkötekniikan koulutusohjelma TIIVISTELMÄ Lappeenrannan teknillinen yliopisto Teknillinen
MASSASÄILIÖN SIMULOINTI JA SÄÄTÖ Simulation and control of pulp tank Sonja Lindman Kandidaatintyö 10.4.2014 LUT Energia Sähkötekniikan koulutusohjelma TIIVISTELMÄ Lappeenrannan teknillinen yliopisto Teknillinen
KESTOMAGNEETTI VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA. Jani Vitikka p87434 Hannu Tiitinen p87432. Dynaaminen kenttäteoria SATE2010
 VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Jani Vitikka p87434 Hannu Tiitinen p87432 Dynaaminen kenttäteoria SATE2010 KESTOMAGNEETTI Sivumäärä: 10 Jätetty tarkastettavaksi: 16.1.2008 Työn tarkastaja
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Jani Vitikka p87434 Hannu Tiitinen p87432 Dynaaminen kenttäteoria SATE2010 KESTOMAGNEETTI Sivumäärä: 10 Jätetty tarkastettavaksi: 16.1.2008 Työn tarkastaja
Xcos 2. XCOSIN KÄYTÖN PERUSTEET MALLIEDITORIN KOMENTOJA...9
 XCOS Timo Mäkelä 2 Sisällysluettelo 1. YLEISTÄ...1 2. XCOSIN KÄYTÖN PERUSTEET...1 2.1 2.2 2.3 2.4 DEMOT...1 KÄYNNISTÄMINEN...2 MALLIN RAKENTAMINEN...4 SIMULOINTI...7 3. MALLIEDITORIN KOMENTOJA...9 3.1
XCOS Timo Mäkelä 2 Sisällysluettelo 1. YLEISTÄ...1 2. XCOSIN KÄYTÖN PERUSTEET...1 2.1 2.2 2.3 2.4 DEMOT...1 KÄYNNISTÄMINEN...2 MALLIN RAKENTAMINEN...4 SIMULOINTI...7 3. MALLIEDITORIN KOMENTOJA...9 3.1
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio. Mat Systeemien Identifiointi. 4. harjoitus
 TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2.4129 Systeemien Identifiointi 4. harjoitus 1. a) Laske valkoisen kohinan spektraalitiheys. b) Tarkastellaan ARMA-prosessia C(q 1 )y = D(q 1 )e,
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2.4129 Systeemien Identifiointi 4. harjoitus 1. a) Laske valkoisen kohinan spektraalitiheys. b) Tarkastellaan ARMA-prosessia C(q 1 )y = D(q 1 )e,
Harjoitus 7: Dynaamisten systeemien säätö (Simulink)
") Harjoitus 7: Dynaamisten systeemien säätö (Simulink) SCI-C0200 Fysiikan ja matematiikan menetelmien studio SCI-C0200 Fysiikan ja matematiikan menetelmien studio 1 Harjoituksen aiheita Dynaamisten (=ajassa
Harjoitus 7: Dynaamisten systeemien säätö (Simulink) SCI-C0200 Fysiikan ja matematiikan menetelmien studio SCI-C0200 Fysiikan ja matematiikan menetelmien studio 1 Harjoituksen aiheita Dynaamisten (=ajassa
Luento 7. tietoverkkotekniikan laitos
 Luento 7 Luento 7 LTI järjestelmien taajuusalueen analyysi II 7. LTI järjestelmän taajuusvaste Vaste kompleksiselle eksponenttiherätteelle Taajuusvaste, Boden diagrammi 7.2 Signaalin muuntuminen LTI järjestelmässä
Luento 7 Luento 7 LTI järjestelmien taajuusalueen analyysi II 7. LTI järjestelmän taajuusvaste Vaste kompleksiselle eksponenttiherätteelle Taajuusvaste, Boden diagrammi 7.2 Signaalin muuntuminen LTI järjestelmässä
Alias-ilmiö eli taajuuden laskostuminen
 Prosessiorientoituneet mallit Todellista hybridijärjestelmää ELEC-C1230 Säätötekniikka Luku 12: Näytteenottoteoreema ja jatkuvien säätimien diskreetit approksimaatiot Prosessiorientoituneet mallit katsotaan
Prosessiorientoituneet mallit Todellista hybridijärjestelmää ELEC-C1230 Säätötekniikka Luku 12: Näytteenottoteoreema ja jatkuvien säätimien diskreetit approksimaatiot Prosessiorientoituneet mallit katsotaan
5. Numeerisesta derivoinnista
 Funktion derivaatta ilmaisee riippumattoman muuttujan muutosnopeuden riippuvan muuttujan suteen. Esimerkiksi paikan derivaatta ajan suteen (paikan ensimmäinen aikaderivaatta) on nopeus, joka ilmaistaan
Funktion derivaatta ilmaisee riippumattoman muuttujan muutosnopeuden riippuvan muuttujan suteen. Esimerkiksi paikan derivaatta ajan suteen (paikan ensimmäinen aikaderivaatta) on nopeus, joka ilmaistaan
s 21.02.2005/BA 1(8) taajuusmuuttajalla
 taajuusmuuttajalla") s../ba () MM/MM- taajuusmuuttajalla Micro Master MM-taajuusmuuttajassa on sisäänrakennettu PID-säädin (MM, PI-säädin) jonka avulla voidaan ohjata erilaisia prosessisuureita kuten pinnakorkeuden-, paineen-,
s../ba () MM/MM- taajuusmuuttajalla Micro Master MM-taajuusmuuttajassa on sisäänrakennettu PID-säädin (MM, PI-säädin) jonka avulla voidaan ohjata erilaisia prosessisuureita kuten pinnakorkeuden-, paineen-,
Prosessitekniikan perusta Automaatiotekniikka
 Prosessitekniikan perusta Automaatiotekniikka Peruskäsitteitä ja niiden välisiä yhteyksiä Prosessi- ja ympäristötekniikan koulutusohjelmissa keskitytään ilmiöihin ja niiden hallintaan. Ilmiöiden tarkastelussa
Prosessitekniikan perusta Automaatiotekniikka Peruskäsitteitä ja niiden välisiä yhteyksiä Prosessi- ja ympäristötekniikan koulutusohjelmissa keskitytään ilmiöihin ja niiden hallintaan. Ilmiöiden tarkastelussa
P F web: FI Vantaa
 AC1-5 KÄYTTÖOHJEET Kiitos, että valitsit LAE Electronic -tuotteen. Parhaan tehokkuuden sekä turvallisuuden takaamiseksi, lue käyttöohjeet huolellisesti ennen laitteen käyttöönottoa. 1-MERKKIEN SELITYKSET
AC1-5 KÄYTTÖOHJEET Kiitos, että valitsit LAE Electronic -tuotteen. Parhaan tehokkuuden sekä turvallisuuden takaamiseksi, lue käyttöohjeet huolellisesti ennen laitteen käyttöönottoa. 1-MERKKIEN SELITYKSET
MS-A010{3,4} (ELEC*) Differentiaali- ja integraalilaskenta 1 Luento 10: Ensimmäisen kertaluvun differentiaaliyhtälö
 Differentiaali- ja integraalilaskenta 1 Luento 10: Ensimmäisen kertaluvun differentiaaliyhtälö") MS-A010{3,4} (ELEC*) Differentiaali- ja integraalilaskenta 1 Luento 10: Ensimmäisen kertaluvun differentiaaliyhtälö Pekka Alestalo, Jarmo Malinen Aalto-yliopisto, Matematiikan ja systeemianalyysin laitos
MS-A010{3,4} (ELEC*) Differentiaali- ja integraalilaskenta 1 Luento 10: Ensimmäisen kertaluvun differentiaaliyhtälö Pekka Alestalo, Jarmo Malinen Aalto-yliopisto, Matematiikan ja systeemianalyysin laitos
(s 2 + 9)(s 2 + 2s + 5) ] + s + 1. s 2 + 2s + 5. Tästä saadaan tehtävälle ratkaisu käänteismuuntamalla takaisin aikatasoon:
![(s 2 + 9)(s 2 + 2s + 5) ] + s + 1. s 2 + 2s + 5. Tästä saadaan tehtävälle ratkaisu käänteismuuntamalla takaisin aikatasoon:](/thumbs/58/41295146.jpg "(s 2 + 9)(s 2 + 2s + 5) ] + s + 1. s 2 + 2s + 5. Tästä saadaan tehtävälle ratkaisu käänteismuuntamalla takaisin aikatasoon:") TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2429 Systeemien Identifiointi 2 harjoituksen ratkaisut Yhtälö voitaisiin ratkaista suoraankin, mutta käytetään Laplace-muunnosta tehtävän ratkaisemisessa
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2429 Systeemien Identifiointi 2 harjoituksen ratkaisut Yhtälö voitaisiin ratkaista suoraankin, mutta käytetään Laplace-muunnosta tehtävän ratkaisemisessa
3.6 Feynman s formulation of quantum mechanics
 3.6 Feynman s formulation of quantum mechanics Course MAT-66000: Quantum mechanics and the particles of nature Ilkka Kylänpää Tampere University of Technology 14.10.2010 Sisältö Johdattelua Klassinen action
3.6 Feynman s formulation of quantum mechanics Course MAT-66000: Quantum mechanics and the particles of nature Ilkka Kylänpää Tampere University of Technology 14.10.2010 Sisältö Johdattelua Klassinen action
Mat Dynaaminen optimointi, mallivastaukset, kierros Vaimennetun heilurin tilanyhtälöt on esitetty luennolla: θ = g sin θ r θ
 Mat-48 Dynaaminen optimointi, mallivastaukset, kierros Vaimennetun heilurin tilanyhtälöt on esitetty luennolla: θ = g sin θ r θ L ẋ = x ẋ = g L sin x rx Epälineaarisen systeemin tasapainotiloja voidaan
Mat-48 Dynaaminen optimointi, mallivastaukset, kierros Vaimennetun heilurin tilanyhtälöt on esitetty luennolla: θ = g sin θ r θ L ẋ = x ẋ = g L sin x rx Epälineaarisen systeemin tasapainotiloja voidaan
MS-A010{3,4,5} (ELEC*, ENG*) Differentiaali- ja integraalilaskenta 1 Luento 10: Ensimmäisen kertaluvun differentiaaliyhtälö
 Differentiaali- ja integraalilaskenta 1 Luento 10: Ensimmäisen kertaluvun differentiaaliyhtälö") MS-A010{3,4,5} (ELEC*, ENG*) Differentiaali- ja integraalilaskenta 1 Luento 10: Ensimmäisen kertaluvun differentiaaliyhtälö Pekka Alestalo, Jarmo Malinen Aalto-yliopisto, Matematiikan ja systeemianalyysin
MS-A010{3,4,5} (ELEC*, ENG*) Differentiaali- ja integraalilaskenta 1 Luento 10: Ensimmäisen kertaluvun differentiaaliyhtälö Pekka Alestalo, Jarmo Malinen Aalto-yliopisto, Matematiikan ja systeemianalyysin
KALLE LESKINEN KAUKOLÄMPÖVERKON ENERGIATEHOKKUUDEN PARANTAMINEN AJOTAPOJA JA SÄÄTÖRATKAISUJA KEHITTÄMÄLLÄ. Diplomityö
 KALLE LESKINEN KAUKOLÄMPÖVERKON ENERGIATEHOKKUUDEN PARANTAMINEN AJOTAPOJA JA SÄÄTÖRATKAISUJA KEHITTÄMÄLLÄ Diplomityö Tarkastaja: professori Matti Vilkko Tarkastaja ja aihe hyväksytty Teknillisten tieteiden
KALLE LESKINEN KAUKOLÄMPÖVERKON ENERGIATEHOKKUUDEN PARANTAMINEN AJOTAPOJA JA SÄÄTÖRATKAISUJA KEHITTÄMÄLLÄ Diplomityö Tarkastaja: professori Matti Vilkko Tarkastaja ja aihe hyväksytty Teknillisten tieteiden
Harjoitus 4: Differentiaaliyhtälöt (Matlab) MS-C2107 Sovelletun matematiikan tietokonetyöt 1
 MS-C2107 Sovelletun matematiikan tietokonetyöt 1") Harjoitus 4: Differentiaaliyhtälöt (Matlab) MS-C2107 Sovelletun matematiikan tietokonetyöt MS-C2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Matlab:n solver komento differentiaaliyhtöiden
Harjoitus 4: Differentiaaliyhtälöt (Matlab) MS-C2107 Sovelletun matematiikan tietokonetyöt MS-C2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Matlab:n solver komento differentiaaliyhtöiden