JOHDATUS TEKOÄLYYN TEEMU ROOS
|
|
|
- Satu Saaristo
- 7 vuotta sitten
- Katselukertoja:
Transkriptio

1 JOHDATUS TEKOÄLYYN TEEMU ROOS
2 TERMINATOR
 FUNKTIONA. LÄHDE: S.")
 FUNKTIONA (TAI")
3 SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN T (AIKA) FUNKTIONA (TAI MUUTTUJAN F (TAAJUUS) => FREQUENCY DOMAIN )
4 SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN T (AIKA) FUNKTIONA (TAI MUUTTUJAN F (TAAJUUS) => FREQUENCY DOMAIN )
5 SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN T (AIKA) FUNKTIONA (TAI MUUTTUJAN F (TAAJUUS) => FREQUENCY DOMAIN )

6 SIGNAALINKÄSITTELY KUVAN TAI ÄÄNITIEDOSTON KOKO ON USEIN SUURI: ESIM X 1000 PIKSELIÄ = PIKSELIÄ KUVA: RESOLUUTIO [DPI] ÄÄNI: NÄYTTEENOTTOTAAJUUS [HZ] KOHINAA ESIINTYY AINA LUONNOLLISESSA SIGNAALISSA SIGNAALI RIIPPUU MYÖS OLOSUHTEISTA: - KUVAKULMA, VALAISTUS, ETÄISYYS,... - KAIKU, MIKROFONI, TAUSTAHÄLY,... TUNNISTAMINEN TAI LUOKITTELU VAIKEAA
7 SIGNAALINKÄSITTELY GRAFIIKKA KUVAN- PHOTO- SHOPPAILU TIETOKONE- LIIKKEEN- KAAPPAUS HAHMON- TUNNISTUS TAMINEN
8 SIGNAALINKÄSITTELY GRAFIIKKA KUVAN- PHOTO- SHOPPAILU TIETOKONE- LIIKKEEN- KAAPPAUS HAHMON- TUNNISTUS TAMINEN

9 MOTION CAPTURE
10 SIGNAALINKÄSITTELY GRAFIIKKA KUVAN- PHOTO- SHOPPAILU TIETOKONE- LIIKKEEN- KAAPPAUS HAHMON- TUNNISTUS TAMINEN

11 MICROSOFT PHOTOSYNTH
12 SIGNAALINKÄSITTELY GRAFIIKKA KUVAN- PHOTO- SHOPPAILU TIETOKONE- LIIKKEEN- KAAPPAUS HAHMON- TUNNISTUS TAMINEN

13 AFGHAN GIRL

14 AFGHAN GIRL INVARIANSSI
15 SIGNAALINKÄSITTELY GRAFIIKKA KUVAN- PHOTO- SHOPPAILU TIETOKONE- LIIKKEEN- KAAPPAUS HAHMON- TUNNISTUS TAMINEN
16 KOHINANPOISTO Example: Denoising Occam s Razor MDL Principle Universal Source Coding MDL Principle (contd.) Modern MDL Histogram Density Estimation Clustering Linear Regression Wavelet Denoising Teemu Roos Introduction to Information-Theoretic Modeling
 Modern MDL Histogram Density Estimation Clustering Linear Regression Wavelet Denoising Teemu Roos Introduction to")
17 KOHINANPOISTO Example: Denoising Occam s Razor MDL Principle Universal Source Coding MDL Principle (contd.) Modern MDL Histogram Density Estimation Clustering Linear Regression Wavelet Denoising Teemu Roos Introduction to Information-Theoretic Modeling

18 KOHINANPOISTO ALKUPERÄINEN KÄSITELTY
 HIUKAN KUIN TAAJUUS- ESITYS ÄÄNELLÄ KÄSITELLÄÄN")
19 KOHINANPOISTO SIGNAALI (ÄÄNI TAI KUVA) ESITETÄÄN NIIN SANOTUSSA AALLOKEMUODOSSA (WAVELET) HIUKAN KUIN TAAJUUS- ESITYS ÄÄNELLÄ KÄSITELLÄÄN SIGNAALIA VEKTORINA
20 KOHINANPOISTO AALLOKEMUODOSSA SIGNAALIN OLENNAINEN OSA KESKITTYNYT VAIN HARVOIHIN, ISOIHIN ELEMENTTEIHIN [0,0,0, 45, 12, 0,0,0,0, 2, 0,0, 120, 0,0,0,...] KOHINA JAKAUTUU TASAISESTI KAIKILLE ELEMENTEILLE [ε,ε,ε,45±ε, 12±ε,ε,ε,ε,ε, 2±ε,ε,ε, 120±ε,ε,ε,ε,...] MENETELMÄ: ASETA NOLLAA LÄHELLÄ OLEVAT ELEMENTIT NOLLIKSI [0,0,0,45±ε, 12±ε,0,0,0,0, 0,0,0, 120±ε,0,0,0,...] TULOS: SUURIN OSA KOHINASTA HÄVIÄÄ VAIN PIENI OSA SIGNAALISTA HÄVIÄÄ
21 KOHINANPOISTO kohinanpoisto(x,t): n length(x) c dwt(x) // discrete wavelet transform for i = 1,...,n: if c[i] < t: c[i] = 0 end-for x idwt(c) // inverse wavelet transform return x
22 KOHINANPOISTO kohinanpoisto(x,t): AALLOKEMUUNNOS n length(x) c dwt(x) // discrete wavelet transform for i = 1,...,n: if c[i] < t: c[i] = 0 end-for x idwt(c) // inverse wavelet transform return x
23 KOHINANPOISTO kohinanpoisto(x,t): n length(x) KYNNYSARVO t c dwt(x) // discrete wavelet transform for i = 1,...,n: if c[i] < t: c[i] = 0 end-for x idwt(c) // inverse wavelet transform return x
24 KOHINANPOISTO kohinanpoisto(x,t): n length(x) c dwt(x) // discrete wavelet transform for i = 1,...,n: KÄÄNTEISMUUNNOS if c[i] < t: c[i] = 0 end-for x idwt(c) // inverse wavelet transform return x
25 KOHINANPOISTO AALLOKEMUUNNOS LUONNOLLINEN SIGNAALI
26 KOHINANPOISTO LUONNOLLINEN SIGNAALI 120 AALLOKEMUUNNOS
27 KOHINANPOISTO KOHINAA LUONNOLLINEN SIGNAALI AALLOKEMUUNNOS
28 KOHINANPOISTO KYNNYSARVO T LUONNOLLINEN SIGNAALI AALLOKEMUUNNOS
29 KOHINANPOISTO LUONNOLLINEN SIGNAALI 121 AALLOKEMUUNNOS
30 KOHINANPOISTO AALLOKEMUUNNOS -8 8 SIGNAALI SILEÄMPI KUIN ENNEN JA VÄHEMMÄN KOHINAA LUONNOLLINEN SIGNAALI
31 KOHINANPOISTO
32 SIGNAALINKÄSITTELY GRAFIIKKA KUVAN- PHOTO- SHOPPAILU TIETOKONE- LIIKKEEN- KAAPPAUS HAHMON- TUNNISTUS TAMINEN
33 RADIOHEAD
34 SIGNAALINKÄSITTELY GRAFIIKKA KUVAN- PHOTO- SHOPPAILU TIETOKONE- LIIKKEEN- KAAPPAUS HAHMON- TUNNISTUS TAMINEN

35 SEURANTA (TRACKING)
36 HAHMONTUNNISTUS TAVOITE TUNNISTAMISESSA LÖYTÄÄ PIIRTEET, JOIDEN PERUSTEELLA VOIDAAN TUNNISTAA SAMA HAHMO ERI KUVISSA TAI ÄÄNINÄYTTEISSÄ KUVASSA TYYPILLISIÄ PIIRRETYYPPEJÄ: - REUNAT - KULMAT ÄÄNESSÄ: - TAAJUUS - TAAJUUDEN MUUTOKSET (YLÖS, ALAS,...) - RYTMI -...
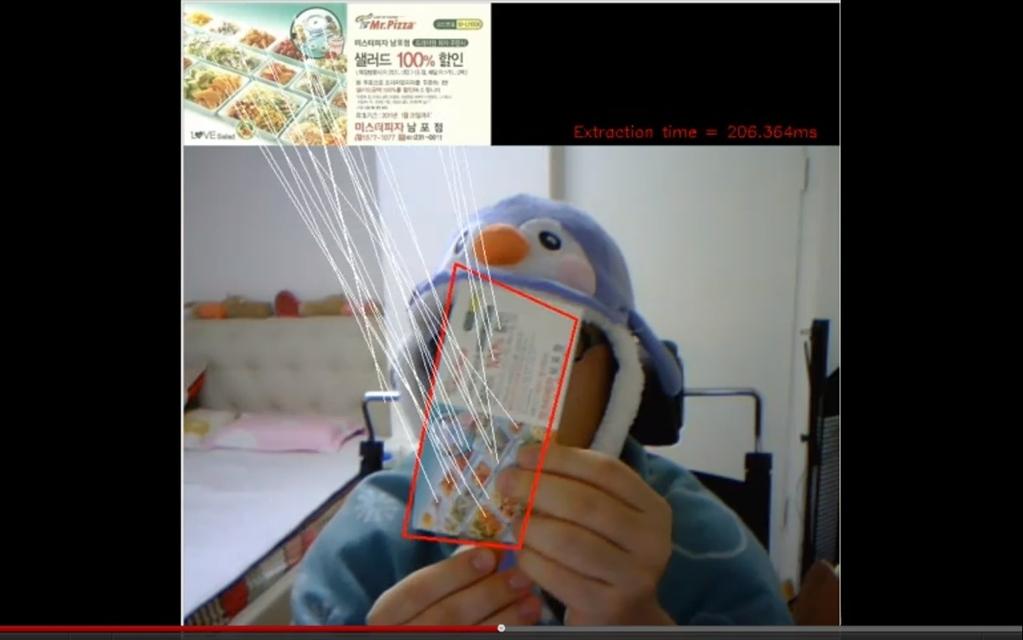
37 SURF HAHMONTUNNISTUKSESSA SUOSIOSSA INVARIANTIT PIIRTEET, KUTEN SIFT (Scale Invariant Feature Transform) JA SURF (Speeded Up Robust Features). H. Bay, T. Tuytelaars & l. van Gool. SURF: Speeded Up Robust Features, Computer Vision and Image Understanding (CVIU), Vol. 110, No. 3, pp , 2008 IDEANA LÖYTÄÄ KUVASTA JOUKKO PIIRTEITÄ (FEATURE), JOTKA SÄILYVÄT SAMANA - ERI KOOSSA INVARIANSSI - ERI KULMASSA JA JOTKA VOI LASKEA - NOPEASTI.
38 SURF VAIHE I: AVAINPISTEIDEN VALINTA: 1. ESITETÄ KUVA INTEGRAALIMUODOSSA (NOPEUTUS) X Y I(X,Y) = Σ Σ F(i,j) i=1 j=1 2. LASKE HESSEN MATRIISIN (HESSIAN) DETERMINANTTI : INTENSITEETIN 2. DERIVAATAT ERI SUUNTIIN
39 SURF VAIHE I: AVAINPISTEIDEN VALINTA: 1. ESITETÄ KUVA INTEGRAALIMUODOSSA (NOPEUTUS) X Y I(X,Y) = Σ Σ F(i,j) i=1 j=1 2. LASKE HESSEN MATRIISIN (HESSIAN) DETERMINANTTI : INTENSITEETIN 2. DERIVAATAT ERI SUUNTIIN
 X Y I(X,Y) = Σ Σ F(i,j) i=1 j=1 2.")
40 SURF VAIHE I: AVAINPISTEIDEN VALINTA: 1. ESITETÄ KUVA INTEGRAALIMUODOSSA (NOPEUTUS) X Y I(X,Y) = Σ Σ F(i,j) i=1 j=1 2. LASKE HESSEN MATRIISIN (HESSIAN) DETERMINANTTI : INTENSITEETIN 2. DERIVAATAT ERI SUUNTIIN
 X Y I(X,Y) = Σ Σ F(i,j) i=1 j=1 2.")
41 SURF VAIHE I: AVAINPISTEIDEN VALINTA: 1. ESITETÄ KUVA INTEGRAALIMUODOSSA (NOPEUTUS) X Y I(X,Y) = Σ Σ F(i,j) i=1 j=1 2. LASKE HESSEN MATRIISIN (HESSIAN) DETERMINANTTI : INTENSITEETIN 2. DERIVAATAT ERI SUUNTIIN
 X Y I(X,Y) = Σ Σ F(i,j) i=1 j=1 2.")
42 SURF VAIHE I: AVAINPISTEIDEN VALINTA: 1. ESITETÄ KUVA INTEGRAALIMUODOSSA (NOPEUTUS) X Y I(X,Y) = Σ Σ F(i,j) i=1 j=1 2. LASKE HESSEN MATRIISIN (HESSIAN) DETERMINANTTI : INTENSITEETIN 2. DERIVAATAT ERI SUUNTIIN
43 SURF VAIHE I: AVAINPISTEIDEN VALINTA: 1. ESITETÄ KUVA INTEGRAALIMUODOSSA (NOPEUTUS) X Y I(X,Y) = Σ Σ F(i,j) i=1 j=1 2. LASKE HESSEN MATRIISIN (HESSIAN) DETERMINANTTI : INTENSITEETIN 2. DERIVAATAT ERI SUUNTIIN
44 SURF VAIHE I: AVAINPISTEIDEN VALINTA: 1. ESITETÄ KUVA INTEGRAALIMUODOSSA (NOPEUTUS) X Y I(X,Y) = Σ Σ F(i,j) i=1 j=1 2. LASKE HESSEN MATRIISIN (HESSIAN) DETERMINANTTI : INTENSITEETIN 2. DERIVAATAT ERI SUUNTIIN 3. TOISTA ERI SKAALAUKSILLA (SKAALAINVARIANTTI) 4. VALITSE det(h):n PAIKALLISET MAKSIMIT AVAINPISTEIKSI
 DETERMINANTTI : INTENSITEETIN 2. DERIVAATAT ERI SUUNTIIN 3. TOISTA ERI SKAALAUKSILLA (SKAALAINVARIANTTI) 4.")
45 SURF VAIHE I: AVAINPISTEIDEN VALINTA: 1. ESITETÄ KUVA INTEGRAALIMUODOSSA (NOPEUTUS) X Y I(X,Y) = Σ Σ F(i,j) i=1 j=1 2. LASKE HESSEN MATRIISIN (HESSIAN) DETERMINANTTI : INTENSITEETIN 2. DERIVAATAT ERI SUUNTIIN 3. TOISTA ERI SKAALAUKSILLA (SKAALAINVARIANTTI) 4. VALITSE det(h):n PAIKALLISET MAKSIMIT AVAINPISTEIKSI
46 SURF VAIHE II: PIIRTEIDEN KUVAUS: 1. TARKASTELE JOKAISEN AVAINPISTEEN YMPÄRISTÖÄ 2. LASKE ORIENTAATIO (INTENSITEETIN PERUSTEELLA) 3. KONSTRUOI INTENSITEETIN VAIHTELUN PERUSTEELLA KUVAAJAVEKTORI (SURFISSA 64-DIMENSIOINEN)


47 SURF VAIHE II: PIIRTEIDEN KUVAUS: 1. TARKASTELE JOKAISEN AVAINPISTEEN YMPÄRISTÖÄ 2. LASKE ORIENTAATIO (INTENSITEETIN PERUSTEELLA) 3. KONSTRUOI INTENSITEETIN VAIHTELUN PERUSTEELLA KUVAAJAVEKTORI (SURFISSA 64-DIMENSIOINEN)
48 SURF VAIHE II: PIIRTEIDEN KUVAUS: 1. TARKASTELE JOKAISEN AVAINPISTEEN YMPÄRISTÖÄ 2. LASKE ORIENTAATIO (INTENSITEETIN PERUSTEELLA) 3. KONSTRUOI INTENSITEETIN VAIHTELUN PERUSTEELLA KUVAAJAVEKTORI (SURFISSA 64-DIMENSIOINEN) TULOKSENA PIIRREVEKTORI: (X,Y,SKAALA,ORIENTAATIO,KUVAAJAVEKTORI)

49 SURF

50 SURF-ESIMERKKI
51 SURF VAIHE III: HAHMONTUNNISTUS 1. ETSI PIIRTEET YHDESTÄ KUVASTA 2. ETSI PIIRTEET TOISESTA KUVASTA 3. ETSI ERI KUVISSA ESIINTYVIÄ PIIRREPAREJA, JOTKA OVAT RIITTÄVÄN LÄHELLÄ TOISIAAN (EUKLIDINEN ETÄISYYS) 4. VOI PARANTAA GEOMETRISILLA RAJOITTEILLA (KORVAT ERI PUOLELLA PÄÄTÄ, SILMÄT SIINÄ VÄLISSÄ, JNE.)
52 SURF
53 SURF
54 SURF
55 SURF
56 SURF
57 SURF
58 ELO RANKING PELAAJIEN A JA B RANKING, R A JA R B ODOTETTAVISSA OLEVA TULOS (TN. ETTÄ A VOITTAA) TULOS S A (1 JOS A VOITTI, 0 B VOITTI, 0.5 JOS TASAPELI) PÄIVITYS (PARAMETRI K=16) SAMA R B :LLE


59 ELO RANKING...I need the algorithm... The Social Network Columbia Pictures, Inc.
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS AI-TUTKIJAN URANÄKYMIÄ AJATUSTENLUKUA COMPUTER VISION SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA MUUTTUJIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA
JOHDATUS TEKOÄLYYN TEEMU ROOS AI-TUTKIJAN URANÄKYMIÄ AJATUSTENLUKUA COMPUTER VISION SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA MUUTTUJIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
Kokeessa piti vastata viiteen (5) tehtävään kuudesta (6). Jokaisen tehtävän maksimipistemäärä on 8.
 tehtävään kuudesta (6). Jokaisen tehtävän maksimipistemäärä on 8.") 582216 Johdatus tekoälyyn (T. Roos) Kurssikoe 19.10.2012 ARVOSTELUPERUSTEET Kokeessa piti vastata viiteen (5) tehtävään kuudesta (6). Jokaisen tehtävän maksimipistemäärä on 8. 1. Tekoälyn filosofiaa yms.
582216 Johdatus tekoälyyn (T. Roos) Kurssikoe 19.10.2012 ARVOSTELUPERUSTEET Kokeessa piti vastata viiteen (5) tehtävään kuudesta (6). Jokaisen tehtävän maksimipistemäärä on 8. 1. Tekoälyn filosofiaa yms.
Johdatus tekoälyyn (T. Roos) Kurssikoe
 Kurssikoe") 582216 Johdatus tekoälyyn (T. Roos) Kurssikoe 18.10.2013 Kokeessa saa pitää mukana käsinkirjoitettua A4-kokoista kaksipuolista lunttilappua, joka on palautettava koepaperin mukana. Huomaa että jokaisen
582216 Johdatus tekoälyyn (T. Roos) Kurssikoe 18.10.2013 Kokeessa saa pitää mukana käsinkirjoitettua A4-kokoista kaksipuolista lunttilappua, joka on palautettava koepaperin mukana. Huomaa että jokaisen
a. (2 p) Selitä Turingin koe. (Huom. ei Turingin kone.) Minkälainen tekoäly on saavutettu, kun Turingin koe ratkaistaan?
 Selitä Turingin koe. (Huom. ei Turingin kone.) Minkälainen tekoäly on saavutettu, kun Turingin koe ratkaistaan?") 582216 Johdatus tekoälyyn (T. Roos) Kurssikoe 19.10.2012 Kokeessa saa pitää mukana käsinkirjoitettua A4-kokoista kaksipuolista lunttilappua, joka on palautettava koepaperin mukana. Huomaa että jokaisen
582216 Johdatus tekoälyyn (T. Roos) Kurssikoe 19.10.2012 Kokeessa saa pitää mukana käsinkirjoitettua A4-kokoista kaksipuolista lunttilappua, joka on palautettava koepaperin mukana. Huomaa että jokaisen
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS PELIPUU -1 0 1 PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU I -ARVO(Solmu) if LOPPUTILA(Solmu) return(arvo(solmu))!
JOHDATUS TEKOÄLYYN TEEMU ROOS PELIPUU -1 0 1 PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU I -ARVO(Solmu) if LOPPUTILA(Solmu) return(arvo(solmu))!
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS PELIPUU ACTIVATOR 1 ACTIVATOR 2 PELIPUU ACTIVATOR 1 ACTIVATOR 2 -1 0 1 PELIPUU PELIPUU PELIPUU I -ARVO(Solmu) if LOPPUTILA(Solmu) return(arvo(solmu)) v = for each Lapsi in
JOHDATUS TEKOÄLYYN TEEMU ROOS PELIPUU ACTIVATOR 1 ACTIVATOR 2 PELIPUU ACTIVATOR 1 ACTIVATOR 2 -1 0 1 PELIPUU PELIPUU PELIPUU I -ARVO(Solmu) if LOPPUTILA(Solmu) return(arvo(solmu)) v = for each Lapsi in
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat.
 Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat.") MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016 Antti Rasila
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016 Antti Rasila
Antti Rasila. Kevät Matematiikan ja systeemianalyysin laitos Aalto-yliopisto. Antti Rasila (Aalto-yliopisto) MS-A0204 Kevät / 16
 MS-A0204 Kevät / 16") MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio. Antti Rasila Matematiikan ja systeemianalyysin laitos
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio. Antti Rasila Matematiikan ja systeemianalyysin laitos
TEEMU ROOS (KALVOT MUOKATTU PATRIK HOYERIN LUENTOMATERIAALISTA)
") JOHDATUS TEKOÄLYYN TEEMU ROOS (KALVOT MUOKATTU PATRIK HOYERIN LUENTOMATERIAALISTA) KONEOPPIMISEN LAJIT OHJATTU OPPIMINEN: - ESIMERKIT OVAT PAREJA (X, Y), TAVOITTEENA ON OPPIA ENNUSTAMAAN Y ANNETTUNA X.
JOHDATUS TEKOÄLYYN TEEMU ROOS (KALVOT MUOKATTU PATRIK HOYERIN LUENTOMATERIAALISTA) KONEOPPIMISEN LAJIT OHJATTU OPPIMINEN: - ESIMERKIT OVAT PAREJA (X, Y), TAVOITTEENA ON OPPIA ENNUSTAMAAN Y ANNETTUNA X.
Inversio-ongelmien laskennallinen peruskurssi Luento 4
 Inversio-ongelmien laskennallinen peruskurssi Luento 4 Kevät 20 Regularisointi Eräs keino yrittää ratkaista (likimääräisesti) huonosti asetettuja ongelmia on regularisaatio. Regularisoinnissa ongelmaa
Inversio-ongelmien laskennallinen peruskurssi Luento 4 Kevät 20 Regularisointi Eräs keino yrittää ratkaista (likimääräisesti) huonosti asetettuja ongelmia on regularisaatio. Regularisoinnissa ongelmaa
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS NEUROVERKOT TURINGIN KONE (TAI TAVALLINEN OHJELMOINTI) VAIN YKSI LASKENNAN MALLI ELÄINTEN HERMOSTOSSA LASKENTA ERILAISTA: - RINNAKKAISUUS - STOKASTISUUS (SATUNNAISUUS) - MASSIIVINEN
JOHDATUS TEKOÄLYYN TEEMU ROOS NEUROVERKOT TURINGIN KONE (TAI TAVALLINEN OHJELMOINTI) VAIN YKSI LASKENNAN MALLI ELÄINTEN HERMOSTOSSA LASKENTA ERILAISTA: - RINNAKKAISUUS - STOKASTISUUS (SATUNNAISUUS) - MASSIIVINEN
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS NEUROVERKOT TURINGIN KONE (TAI TAVALLINEN OHJELMOINTI) VAIN YKSI LASKENNAN MALLI ELÄINTEN HERMOSTOSSA LASKENTA ERILAISTA: - RINNAKKAISUUS - STOKASTISUUS (SATUNNAISUUS) - MASSIIVINEN
JOHDATUS TEKOÄLYYN TEEMU ROOS NEUROVERKOT TURINGIN KONE (TAI TAVALLINEN OHJELMOINTI) VAIN YKSI LASKENNAN MALLI ELÄINTEN HERMOSTOSSA LASKENTA ERILAISTA: - RINNAKKAISUUS - STOKASTISUUS (SATUNNAISUUS) - MASSIIVINEN
Kuvan pakkaus JPEG (Joint Photographic Experts Group)
") Kuvan pakkaus JPEG (Joint Photographic Experts Group) Arne Broman Mikko Toivonen Syksy 2003 Historia 1840 1895 1920-luku 1930-luku Fotografinen filmi Louis J. M. Daguerre, Ranska Ensimmäinen julkinen elokuva
Kuvan pakkaus JPEG (Joint Photographic Experts Group) Arne Broman Mikko Toivonen Syksy 2003 Historia 1840 1895 1920-luku 1930-luku Fotografinen filmi Louis J. M. Daguerre, Ranska Ensimmäinen julkinen elokuva
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 8 1 Suunnattu derivaatta Aluksi tarkastelemme vektoreita, koska ymmärrys vektoreista helpottaa alla olevien asioiden omaksumista. Kun liikutaan tasossa eli avaruudessa
Matematiikan tukikurssi Kurssikerta 8 1 Suunnattu derivaatta Aluksi tarkastelemme vektoreita, koska ymmärrys vektoreista helpottaa alla olevien asioiden omaksumista. Kun liikutaan tasossa eli avaruudessa
MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat.
 MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat. Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät 2016 1 Perustuu
MS-A0205/MS-A0206 Differentiaali- ja integraalilaskenta 2 Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat. Jarmo Malinen Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät 2016 1 Perustuu
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS NEUROVERKOT TURINGIN KONE (TAI TAVALLINEN OHJELMOINTI) VAIN YKSI LASKENNAN MALLI ELÄINTEN HERMOSTOSSA LASKENTA ERILAISTA: - RINNAKKAISUUS - STOKASTISUUS (SATUNNAISUUS) - MASSIIVINEN
JOHDATUS TEKOÄLYYN TEEMU ROOS NEUROVERKOT TURINGIN KONE (TAI TAVALLINEN OHJELMOINTI) VAIN YKSI LASKENNAN MALLI ELÄINTEN HERMOSTOSSA LASKENTA ERILAISTA: - RINNAKKAISUUS - STOKASTISUUS (SATUNNAISUUS) - MASSIIVINEN
y x1 σ t 1 = c y x 1 σ t 1 = y x 2 σ t 2 y x 2 x 1 y = σ(t 2 t 1 ) x 2 x 1 y t 2 t 1
 x 2 x 1 y t 2 t 1") 1. Tarkastellaan funktiota missä σ C ja y (y 1,..., y n ) R n. u : R n R C, u(x, t) e i(y x σt), (a) Miksi funktiota u(x, t) voidaan kutsua tasoaalloksi, jonka aaltorintama on kohtisuorassa vektorin y
1. Tarkastellaan funktiota missä σ C ja y (y 1,..., y n ) R n. u : R n R C, u(x, t) e i(y x σt), (a) Miksi funktiota u(x, t) voidaan kutsua tasoaalloksi, jonka aaltorintama on kohtisuorassa vektorin y
Inversio-ongelmien laskennallinen peruskurssi Luento 2
 Inversio-ongelmien laskennallinen peruskurssi Luento 2 Kevät 2012 1 Lineaarinen inversio-ongelma Määritelmä 1.1. Yleinen (reaaliarvoinen) lineaarinen inversio-ongelma voidaan esittää muodossa m = Ax +
Inversio-ongelmien laskennallinen peruskurssi Luento 2 Kevät 2012 1 Lineaarinen inversio-ongelma Määritelmä 1.1. Yleinen (reaaliarvoinen) lineaarinen inversio-ongelma voidaan esittää muodossa m = Ax +
MS-A0207 Differentiaali- ja integraalilaskenta 2 Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio.
 MS-A0207 Differentiaali- ja integraalilaskenta 2 Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio. Riikka Korte Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto
MS-A0207 Differentiaali- ja integraalilaskenta 2 Luento 5: Gradientti ja suunnattu derivaatta. Vektoriarvoiset funktiot. Taylor-approksimaatio. Riikka Korte Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto
2.8. Kannanvaihto R n :ssä
 28 Kannanvaihto R n :ssä Seuraavassa kantavektoreiden { x, x 2,, x n } järjestystä ei saa vaihtaa Vektorit ovat pystyvektoreita ( x x 2 x n ) on vektoreiden x, x 2,, x n muodostama matriisi, missä vektorit
28 Kannanvaihto R n :ssä Seuraavassa kantavektoreiden { x, x 2,, x n } järjestystä ei saa vaihtaa Vektorit ovat pystyvektoreita ( x x 2 x n ) on vektoreiden x, x 2,, x n muodostama matriisi, missä vektorit
Tampereen yliopisto Tietokonegrafiikka 2013 Tietojenkäsittelytiede Harjoitus
 Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
1 Rajoittamaton optimointi
 Taloustieteen matemaattiset menetelmät 7 materiaali 5 Rajoittamaton optimointi Yhden muuttujan tapaus f R! R Muistutetaan mieleen maksimin määritelmä. Funktiolla f on maksimi pisteessä x jos kaikille y
Taloustieteen matemaattiset menetelmät 7 materiaali 5 Rajoittamaton optimointi Yhden muuttujan tapaus f R! R Muistutetaan mieleen maksimin määritelmä. Funktiolla f on maksimi pisteessä x jos kaikille y
Taso 1/5 Sisältö ESITIEDOT: vektori, koordinaatistot, piste, suora
 Taso 1/5 Sisältö Taso geometrisena peruskäsitteenä Kolmiulotteisen alkeisgeometrian peruskäsitteisiin kuuluu taso pisteen ja suoran lisäksi. Intuitiivisesti sitä voidaan ajatella joka suunnassa äärettömyyteen
Taso 1/5 Sisältö Taso geometrisena peruskäsitteenä Kolmiulotteisen alkeisgeometrian peruskäsitteisiin kuuluu taso pisteen ja suoran lisäksi. Intuitiivisesti sitä voidaan ajatella joka suunnassa äärettömyyteen
Numeeriset menetelmät
 Numeeriset menetelmät Luento 13 Ti 18.10.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 13 Ti 18.10.2011 p. 1/43 p. 1/43 Nopeat Fourier-muunnokset Fourier-sarja: Jaksollisen funktion esitys
Numeeriset menetelmät Luento 13 Ti 18.10.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 13 Ti 18.10.2011 p. 1/43 p. 1/43 Nopeat Fourier-muunnokset Fourier-sarja: Jaksollisen funktion esitys
Talousmatematiikan perusteet: Luento 14. Rajoittamaton optimointi Hessen matriisi Ominaisarvot Ääriarvon laadun tarkastelu
 Talousmatematiikan perusteet: Luento 14 Rajoittamaton optimointi Hessen matriisi Ominaisarvot Ääriarvon laadun tarkastelu Luennolla 6 Tarkastelimme yhden muuttujan funktion f(x) rajoittamatonta optimointia
Talousmatematiikan perusteet: Luento 14 Rajoittamaton optimointi Hessen matriisi Ominaisarvot Ääriarvon laadun tarkastelu Luennolla 6 Tarkastelimme yhden muuttujan funktion f(x) rajoittamatonta optimointia
Ajatellaan jotakin datajoukkoa joka on talletettu datamatriisiin X: n vectors. TKK, Informaatiotekniikan laboratorio 1
 3. DATA VEKTORINA 3.1. Vektorit, matriisit, etäisyysmitat Ajatellaan jotakin datajoukkoa joka on talletettu datamatriisiin X: n vectors {}}{ d vector elements X TKK, Informaatiotekniikan laboratorio 1
3. DATA VEKTORINA 3.1. Vektorit, matriisit, etäisyysmitat Ajatellaan jotakin datajoukkoa joka on talletettu datamatriisiin X: n vectors {}}{ d vector elements X TKK, Informaatiotekniikan laboratorio 1
AHTI OKSANEN SIFT-MENETELMÄ PIIRTEENSOVITUKSESSA. Kandidaatintyö
 AHTI OKSANEN SIFT-MENETELMÄ PIIRTEENSOVITUKSESSA Kandidaatintyö Tarkastaja: lehtori Heikki Huttunen Jätetty tarkastettavaksi 8. toukokuuta 2011 ii TIIVISTELMÄ TAMPEREEN TEKNILLINEN YLIOPISTO Signaalinkäsittelyn
AHTI OKSANEN SIFT-MENETELMÄ PIIRTEENSOVITUKSESSA Kandidaatintyö Tarkastaja: lehtori Heikki Huttunen Jätetty tarkastettavaksi 8. toukokuuta 2011 ii TIIVISTELMÄ TAMPEREEN TEKNILLINEN YLIOPISTO Signaalinkäsittelyn
läheisyydessä. Piirrä funktio f ja nämä approksimaatiot samaan kuvaan. Näyttääkö järkeenkäyvältä?
 BM20A5840 - Usean muuttujan funktiot ja sarjat Harjoitus 1, Kevät 2017 1. Tunnemme vektorit a = [ 1 2 3 ] ja b = [ 2 1 2 ]. Laske (i) kummankin vektorin pituus (eli itseisarvo, eli normi); (ii) vektorien
BM20A5840 - Usean muuttujan funktiot ja sarjat Harjoitus 1, Kevät 2017 1. Tunnemme vektorit a = [ 1 2 3 ] ja b = [ 2 1 2 ]. Laske (i) kummankin vektorin pituus (eli itseisarvo, eli normi); (ii) vektorien
Tiedonkeruu ja analysointi
 Tiedonkeruu ja analysointi ViDRoM Virtual Design of Rotating Machines Raine Viitala 30.9.2015 ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat
Tiedonkeruu ja analysointi ViDRoM Virtual Design of Rotating Machines Raine Viitala 30.9.2015 ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat
Numeeriset menetelmät
 Numeeriset menetelmät Luento 3 Ti 13.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 3 Ti 13.9.2011 p. 1/37 p. 1/37 Epälineaariset yhtälöt Newtonin menetelmä: x n+1 = x n f(x n) f (x n ) Sekanttimenetelmä:
Numeeriset menetelmät Luento 3 Ti 13.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 3 Ti 13.9.2011 p. 1/37 p. 1/37 Epälineaariset yhtälöt Newtonin menetelmä: x n+1 = x n f(x n) f (x n ) Sekanttimenetelmä:
2D piirrelaskennan alkeet, osa I
 2D piirrelaskennan alkeet, osa I Ville Tirronen aleator@jyu.fi University of Jyväskylä 18. syyskuuta 2008 Näkökulma Aiheet Tarkastellaan yksinkertaisia 2D kuvankäsittelyoperaattoreita Näkökulmana on tunnistava
2D piirrelaskennan alkeet, osa I Ville Tirronen aleator@jyu.fi University of Jyväskylä 18. syyskuuta 2008 Näkökulma Aiheet Tarkastellaan yksinkertaisia 2D kuvankäsittelyoperaattoreita Näkökulmana on tunnistava
S-108-2110 OPTIIKKA 1/10 Laboratoriotyö: Polarisaatio POLARISAATIO. Laboratoriotyö
 S-108-2110 OPTIIKKA 1/10 POLARISAATIO Laboratoriotyö S-108-2110 OPTIIKKA 2/10 SISÄLLYSLUETTELO 1 Polarisaatio...3 2 Työn suoritus...6 2.1 Työvälineet...6 2.2 Mittaukset...6 2.2.1 Malus:in laki...6 2.2.2
S-108-2110 OPTIIKKA 1/10 POLARISAATIO Laboratoriotyö S-108-2110 OPTIIKKA 2/10 SISÄLLYSLUETTELO 1 Polarisaatio...3 2 Työn suoritus...6 2.1 Työvälineet...6 2.2 Mittaukset...6 2.2.1 Malus:in laki...6 2.2.2
Tiedonkeruu ja analysointi
 Tiedonkeruu ja analysointi ViDRoM Virtual Design of Rotating Machines Raine Viitala ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat laakerit,
Tiedonkeruu ja analysointi ViDRoM Virtual Design of Rotating Machines Raine Viitala ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat laakerit,
Kuva 1: Funktion f tasa-arvokäyriä. Ratkaisu. Suurin kasvunopeus on gradientin suuntaan. 6x 0,2
 HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi I, syksy 018 Harjoitus Ratkaisuehdotukset Tehtävä 1. Olkoon f : R R f(x 1, x ) = x 1 + x Olkoon C R. Määritä tasa-arvojoukko Sf(C) = {(x 1, x
HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi I, syksy 018 Harjoitus Ratkaisuehdotukset Tehtävä 1. Olkoon f : R R f(x 1, x ) = x 1 + x Olkoon C R. Määritä tasa-arvojoukko Sf(C) = {(x 1, x
Radioastronomian käsitteitä
 Radioastronomian käsitteitä allonpituusalue ~ 100 m - 1 mm MHz 300 GHz Leveä aallonpituusalue: erilaisia antenneja, monenlaista tekniikkaa Ei (suoraan) kuvia Signaali yleensä
Radioastronomian käsitteitä allonpituusalue ~ 100 m - 1 mm MHz 300 GHz Leveä aallonpituusalue: erilaisia antenneja, monenlaista tekniikkaa Ei (suoraan) kuvia Signaali yleensä
Tässä dokumentissa on ensimmäisten harjoitusten malliratkaisut MATLABskripteinä. Voit kokeilla itse niiden ajamista ja toimintaa MATLABissa.
 Laskuharjoitus 1A Mallit Tässä dokumentissa on ensimmäisten harjoitusten malliratkaisut MATLABskripteinä. Voit kokeilla itse niiden ajamista ja toimintaa MATLABissa. 1. tehtävä %% 1. % (i) % Vektorit luodaan
Laskuharjoitus 1A Mallit Tässä dokumentissa on ensimmäisten harjoitusten malliratkaisut MATLABskripteinä. Voit kokeilla itse niiden ajamista ja toimintaa MATLABissa. 1. tehtävä %% 1. % (i) % Vektorit luodaan
2. harjoitus - malliratkaisut Tehtävä 3. Tasojännitystilassa olevan kappaleen kaksiakselista rasitustilaa käytetään usein materiaalimalleissa esiintyv
 2. harjoitus - malliratkaisut Tehtävä 3. Tasojännitystilassa olevan kappaleen kaksiakselista rasitustilaa käytetään usein materiaalimalleissa esiintyvien vakioiden määrittämiseen. Jännitystila on siten
2. harjoitus - malliratkaisut Tehtävä 3. Tasojännitystilassa olevan kappaleen kaksiakselista rasitustilaa käytetään usein materiaalimalleissa esiintyvien vakioiden määrittämiseen. Jännitystila on siten
r > y x z x = z y + y x z y + y x = r y x + y x = r
 HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi I, syksy 018 Harjoitus Ratkaisuehdotukset Tehtävä 1. Osoita, että avoin kuula on avoin joukko ja suljettu kuula on suljettu joukko. Ratkaisu.
HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi I, syksy 018 Harjoitus Ratkaisuehdotukset Tehtävä 1. Osoita, että avoin kuula on avoin joukko ja suljettu kuula on suljettu joukko. Ratkaisu.
Johdatus materiaalimalleihin
 Johdatus materiaalimalleihin 2 kotitehtäväsarja - kimmoisat materiaalimallit Tehtävä Erään epälineaarisen kimmoisen isotrooppisen aineen konstitutiivinen yhtälö on σ = f(i ε )I + Ge () jossa venymätensorin
Johdatus materiaalimalleihin 2 kotitehtäväsarja - kimmoisat materiaalimallit Tehtävä Erään epälineaarisen kimmoisen isotrooppisen aineen konstitutiivinen yhtälö on σ = f(i ε )I + Ge () jossa venymätensorin
Radiointerferometria II
 Radiointerferometria II Kolme ALMA-antennia ALMA tulevaisuudessa Puuttuva informaatio Epätäydellinen uv-tason peitto: 1. Keskusaukko : pintamaisen lähteen kokonaisvuontiheys jää mittaamatta, V (0, 0) =
Radiointerferometria II Kolme ALMA-antennia ALMA tulevaisuudessa Puuttuva informaatio Epätäydellinen uv-tason peitto: 1. Keskusaukko : pintamaisen lähteen kokonaisvuontiheys jää mittaamatta, V (0, 0) =
Differentiaaliyhtälöryhmä
 Differentiaaliyhtälöryhmä Ensimmäisen kertaluvun differentiaaliyhtälöryhmä vaikkapa korkeamman kertaluvun yhtälöä vastaava normaaliryhmä voidaan ratkaista numeerisesti täsmälleen samanlaisilla kaavoilla
Differentiaaliyhtälöryhmä Ensimmäisen kertaluvun differentiaaliyhtälöryhmä vaikkapa korkeamman kertaluvun yhtälöä vastaava normaaliryhmä voidaan ratkaista numeerisesti täsmälleen samanlaisilla kaavoilla
Jos sinulla on kysyttävää 10. Vastaanotin toimi.
 Tärkeät turvallisuustiedot ennen käyttöönottoa 1 Onnea uuden Langattoman Baby Guardin johdosta. Ennen kuin otat langattoman Baby Guardin käyttöösi, lue kaikki turvallisuus- ja käyttööhjeet huolellisesti,
Tärkeät turvallisuustiedot ennen käyttöönottoa 1 Onnea uuden Langattoman Baby Guardin johdosta. Ennen kuin otat langattoman Baby Guardin käyttöösi, lue kaikki turvallisuus- ja käyttööhjeet huolellisesti,
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
Janne Mustaniemi Eemeli Ristimella Joonas Jyrkkä Esineiden mittaaminen älypuhelimella
 TIETO- JA SÄHKÖTEKNIIKAN TIEDEKUNTA Janne Mustaniemi Eemeli Ristimella Joonas Jyrkkä Esineiden mittaaminen älypuhelimella Kandidaatintyö Tietotekniikan tutkinto-ohjelma Toukokuu 2017 Mustaniemi Janne,
TIETO- JA SÄHKÖTEKNIIKAN TIEDEKUNTA Janne Mustaniemi Eemeli Ristimella Joonas Jyrkkä Esineiden mittaaminen älypuhelimella Kandidaatintyö Tietotekniikan tutkinto-ohjelma Toukokuu 2017 Mustaniemi Janne,
Vektorilaskenta, tentti
 Vektorilaskenta, tentti 27102017 Tentin kesto n 3 tuntia Vastaa NELJÄÄN tehtävään Jos vastaat kaikkiin, niin neljä PARASTA otetaan huomioon Kuvat vievät tilaa, joten muista kurkistaa paperin toiselle puolelle
Vektorilaskenta, tentti 27102017 Tentin kesto n 3 tuntia Vastaa NELJÄÄN tehtävään Jos vastaat kaikkiin, niin neljä PARASTA otetaan huomioon Kuvat vievät tilaa, joten muista kurkistaa paperin toiselle puolelle
Tarvitseeko informaatioteknologia matematiikkaa?
 Tarvitseeko informaatioteknologia matematiikkaa? Oulun yliopisto Matemaattisten tieteiden laitos 1 Kyllä kai IT matematiikkaa tarvitsee!? IT ja muu korkea teknologia on nimenomaan matemaattista teknologiaa.
Tarvitseeko informaatioteknologia matematiikkaa? Oulun yliopisto Matemaattisten tieteiden laitos 1 Kyllä kai IT matematiikkaa tarvitsee!? IT ja muu korkea teknologia on nimenomaan matemaattista teknologiaa.
SGN-1200 Signaalinkäsittelyn menetelmät Välikoe
 SGN-100 Signaalinkäsittelyn menetelmät Välikoe 6.4.010 Sivuilla 1- on. Älä vastaa siihen, jos et ollut ensimmäisessä välikokeessa. Tentin kysymykset ovat sivuilla 3-4. Vastaa vain jompaan kumpaan kokeeseen,
SGN-100 Signaalinkäsittelyn menetelmät Välikoe 6.4.010 Sivuilla 1- on. Älä vastaa siihen, jos et ollut ensimmäisessä välikokeessa. Tentin kysymykset ovat sivuilla 3-4. Vastaa vain jompaan kumpaan kokeeseen,
Ei välttämättä, se voi olla esimerkiksi Reuleaux n kolmio:
 Inversio-ongelmista Craig, Brown: Inverse problems in astronomy, Adam Hilger 1986. Havaitaan oppositiossa olevaa asteroidia. Pyörimisestä huolimatta sen kirkkaus ei muutu. Projisoitu pinta-ala pysyy ilmeisesti
Inversio-ongelmista Craig, Brown: Inverse problems in astronomy, Adam Hilger 1986. Havaitaan oppositiossa olevaa asteroidia. Pyörimisestä huolimatta sen kirkkaus ei muutu. Projisoitu pinta-ala pysyy ilmeisesti
Luento 8: Epälineaarinen optimointi
 Luento 8: Epälineaarinen optimointi Vektoriavaruus R n R n on kaikkien n-jonojen x := (x,..., x n ) joukko. Siis R n := Määritellään nollavektori = (,..., ). Reaalisten m n-matriisien joukkoa merkitään
Luento 8: Epälineaarinen optimointi Vektoriavaruus R n R n on kaikkien n-jonojen x := (x,..., x n ) joukko. Siis R n := Määritellään nollavektori = (,..., ). Reaalisten m n-matriisien joukkoa merkitään
Solmu 3/2001 Solmu 3/2001. Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä:
 Frégier n lause Simo K. Kivelä Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä: Suorakulmaisen kolmion kaikki kärjet sijaitsevat paraabelilla y = x 2 ; suoran kulman
Frégier n lause Simo K. Kivelä Kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa oli seuraava tehtävä: Suorakulmaisen kolmion kaikki kärjet sijaitsevat paraabelilla y = x 2 ; suoran kulman
Ensimmäisen asteen polynomifunktio
 Ensimmäisen asteen polnomifunktio Yhtälön f = a+ b, a 0 määrittelemää funktiota sanotaan ensimmäisen asteen polnomifunktioksi. Esimerkki. Ensimmäisen asteen polnomifuktioita ovat esimerkiksi f = 3 7, v()
Ensimmäisen asteen polnomifunktio Yhtälön f = a+ b, a 0 määrittelemää funktiota sanotaan ensimmäisen asteen polnomifunktioksi. Esimerkki. Ensimmäisen asteen polnomifuktioita ovat esimerkiksi f = 3 7, v()
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS LUONNOLLISEN KIELEN KÄSITTELY (NATURAL LANGUAGE PROCESSING, NLP) TEKOÄLYSOVELLUKSET, JOTKA LIITTYVÄT IHMISTEN KANSSA (TAI IHMISTEN VÄLISEEN) KOMMUNIKAATIOON, OVAT TEKEMISISSÄ
JOHDATUS TEKOÄLYYN TEEMU ROOS LUONNOLLISEN KIELEN KÄSITTELY (NATURAL LANGUAGE PROCESSING, NLP) TEKOÄLYSOVELLUKSET, JOTKA LIITTYVÄT IHMISTEN KANSSA (TAI IHMISTEN VÄLISEEN) KOMMUNIKAATIOON, OVAT TEKEMISISSÄ
Johdatus tekoälyn taustalla olevaan matematiikkaan
 Johdatus tekoälyn taustalla olevaan matematiikkaan Informaatioteknologian tiedekunta Jyväskylän yliopisto 2. luento 10.11.2017 Keinotekoiset neuroverkot Neuroverkko koostuu syöte- ja ulostulokerroksesta
Johdatus tekoälyn taustalla olevaan matematiikkaan Informaatioteknologian tiedekunta Jyväskylän yliopisto 2. luento 10.11.2017 Keinotekoiset neuroverkot Neuroverkko koostuu syöte- ja ulostulokerroksesta
3.2.2 Tikhonovin regularisaatio
 3 Tikhonovin regularisaatio Olkoon x 0 R n tuntematon, M R m n teoriamatriisi ja y Mx + ε R m (316 annettu data Häiriöherkässä ongelmassa pienimmän neliösumman miniminormiratkaisu x M + y Q N (M x + M
3 Tikhonovin regularisaatio Olkoon x 0 R n tuntematon, M R m n teoriamatriisi ja y Mx + ε R m (316 annettu data Häiriöherkässä ongelmassa pienimmän neliösumman miniminormiratkaisu x M + y Q N (M x + M
1. OHJAAMATON OPPIMINEN JA KLUSTEROINTI
 1. OHJAAMATON OPPIMINEN JA KLUSTEROINTI 1 1.1 Funktion optimointiin perustuvat klusterointialgoritmit Klusteroinnin onnistumista mittaavan funktion J optimointiin perustuvissa klusterointialgoritmeissä
1. OHJAAMATON OPPIMINEN JA KLUSTEROINTI 1 1.1 Funktion optimointiin perustuvat klusterointialgoritmit Klusteroinnin onnistumista mittaavan funktion J optimointiin perustuvissa klusterointialgoritmeissä
9. Tila-avaruusmallit
 9. Tila-avaruusmallit Aikasarjan stokastinen malli ja aikasarjasta tehdyt havainnot voidaan esittää joustavassa ja monipuolisessa muodossa ns. tila-avaruusmallina. Useat aikasarjat edustavat dynaamisia
9. Tila-avaruusmallit Aikasarjan stokastinen malli ja aikasarjasta tehdyt havainnot voidaan esittää joustavassa ja monipuolisessa muodossa ns. tila-avaruusmallina. Useat aikasarjat edustavat dynaamisia
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 9 1 Implisiittinen derivointi Tarkastellaan nyt yhtälöä F(x, y) = c, jossa x ja y ovat muuttujia ja c on vakio Esimerkki tällaisesta yhtälöstä on x 2 y 5 + 5xy = 14
Matematiikan tukikurssi Kurssikerta 9 1 Implisiittinen derivointi Tarkastellaan nyt yhtälöä F(x, y) = c, jossa x ja y ovat muuttujia ja c on vakio Esimerkki tällaisesta yhtälöstä on x 2 y 5 + 5xy = 14
Numeeriset menetelmät
 Numeeriset menetelmät Luento 2 To 8.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 2 To 8.9.2011 p. 1/33 p. 1/33 Lukujen tallennus Kiintoluvut (integer) tarkka esitys aritmeettiset operaatiot
Numeeriset menetelmät Luento 2 To 8.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 2 To 8.9.2011 p. 1/33 p. 1/33 Lukujen tallennus Kiintoluvut (integer) tarkka esitys aritmeettiset operaatiot
Differentiaali- ja integraalilaskenta 2 Laskuharjoitus 4 / vko 40
 Differentiaali- ja integraalilaskenta 2 Laskuharjoitus 4 / vko 40 Alkuviikolla harjoitustehtäviä lasketaan harjoitustilaisuudessa. Loppuviikolla näiden harjoitustehtävien tulee olla ratkaistuina harjoituksiin
Differentiaali- ja integraalilaskenta 2 Laskuharjoitus 4 / vko 40 Alkuviikolla harjoitustehtäviä lasketaan harjoitustilaisuudessa. Loppuviikolla näiden harjoitustehtävien tulee olla ratkaistuina harjoituksiin
1. OHJAAMATON OPPIMINEN JA KLUSTEROINTI
 1. OHJAAMATON OPPIMINEN JA KLUSTEROINTI 1 1.1 Funktion optimointiin perustuvat klusterointialgoritmit Klusteroinnin onnistumista mittaavan funktion J optimointiin perustuvissa klusterointialgoritmeissä
1. OHJAAMATON OPPIMINEN JA KLUSTEROINTI 1 1.1 Funktion optimointiin perustuvat klusterointialgoritmit Klusteroinnin onnistumista mittaavan funktion J optimointiin perustuvissa klusterointialgoritmeissä
Lineaarialgebra MATH.1040 / voima
 Lineaarialgebra MATH.1040 / voima 1 Seuraavaksi määrittelemme kaksi vektoreille määriteltyä tuloa; pistetulo ja. Määritelmät ja erilaiset tulojen ominaisuudet saattavat tuntua, sekavalta kokonaisuudelta.
Lineaarialgebra MATH.1040 / voima 1 Seuraavaksi määrittelemme kaksi vektoreille määriteltyä tuloa; pistetulo ja. Määritelmät ja erilaiset tulojen ominaisuudet saattavat tuntua, sekavalta kokonaisuudelta.
BM20A5840 Usean muuttujan funktiot ja sarjat Harjoitus 1, Kevät 2018
 BM20A5840 Usean muuttujan funktiot ja sarjat Harjoitus 1, Kevät 2018 1. (a) Tunnemme vektorit a = [ 5 1 1 ] ja b = [ 2 0 1 ]. Laske (i) kummankin vektorin pituus (eli itseisarvo, eli normi); (ii) vektorien
BM20A5840 Usean muuttujan funktiot ja sarjat Harjoitus 1, Kevät 2018 1. (a) Tunnemme vektorit a = [ 5 1 1 ] ja b = [ 2 0 1 ]. Laske (i) kummankin vektorin pituus (eli itseisarvo, eli normi); (ii) vektorien
Inversio-ongelmien laskennallinen peruskurssi Luento 7 8
 Inversio-ongelmien laskennallinen peruskurssi Luento 7 8 Kevät 2011 1 Iteratiivisista menetelmistä Tähän mennessä on tarkasteltu niin sanottuja suoria menetelmiä, joissa (likimääräinen) ratkaisu saadaan
Inversio-ongelmien laskennallinen peruskurssi Luento 7 8 Kevät 2011 1 Iteratiivisista menetelmistä Tähän mennessä on tarkasteltu niin sanottuja suoria menetelmiä, joissa (likimääräinen) ratkaisu saadaan
Organization of (Simultaneous) Spectral Components
 Spectral Components") Organization of (Simultaneous) Spectral Components ihmiskuulo yrittää ryhmitellä ja yhdistää samasta fyysisestä lähteestä tulevat akustiset komponentit yhdistelyä tapahtuu sekä eri- että samanaikaisille
Organization of (Simultaneous) Spectral Components ihmiskuulo yrittää ryhmitellä ja yhdistää samasta fyysisestä lähteestä tulevat akustiset komponentit yhdistelyä tapahtuu sekä eri- että samanaikaisille
Videoista voimaa! Parempia videoita mobiilisti. Jonne Hirvonen.
 Videoista voimaa! Parempia videoita mobiilisti Jonne Hirvonen Miksi video? Herättää huomiota Kertoo tarinoita Synnyttää tunteita Jää mieleen Videoita mobiilisti? Älypuhelin = tietokone + kamera = kaikki
Videoista voimaa! Parempia videoita mobiilisti Jonne Hirvonen Miksi video? Herättää huomiota Kertoo tarinoita Synnyttää tunteita Jää mieleen Videoita mobiilisti? Älypuhelin = tietokone + kamera = kaikki
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä.
 Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä.") MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 7: Pienimmän neliösumman menetelmä ja Newtonin menetelmä. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016
Talousmatematiikan perusteet: Luento 14. Rajoitettu optimointi Lagrangen menetelmä: yksi yhtälörajoitus Lagrangen menetelmä: monta yhtälörajoitusta
 Talousmatematiikan perusteet: Luento 14 Rajoitettu optimointi Lagrangen menetelmä: yksi yhtälörajoitus Lagrangen menetelmä: monta yhtälörajoitusta Viime luennolla Tarkastelimme usean muuttujan funktioiden
Talousmatematiikan perusteet: Luento 14 Rajoitettu optimointi Lagrangen menetelmä: yksi yhtälörajoitus Lagrangen menetelmä: monta yhtälörajoitusta Viime luennolla Tarkastelimme usean muuttujan funktioiden
Lauseen erikoistapaus on ollut kevään 2001 ylioppilaskirjoitusten pitkän matematiikan kokeessa seuraavassa muodossa:
 Simo K. Kivelä, 13.7.004 Frégier'n lause Toisen asteen käyrillä ellipseillä, paraabeleilla, hyperbeleillä ja niiden erikoistapauksilla on melkoinen määrä yksinkertaisia säännöllisyysominaisuuksia. Eräs
Simo K. Kivelä, 13.7.004 Frégier'n lause Toisen asteen käyrillä ellipseillä, paraabeleilla, hyperbeleillä ja niiden erikoistapauksilla on melkoinen määrä yksinkertaisia säännöllisyysominaisuuksia. Eräs
ABHELSINKI UNIVERSITY OF TECHNOLOGY
 Johdatus regressioanalyysiin Regressioanalyysin idea Oletetaan, että haluamme selittää jonkin selitettävän muuttujan havaittujen arvojen vaihtelun selittävien muuttujien havaittujen arvojen vaihtelun avulla.
Johdatus regressioanalyysiin Regressioanalyysin idea Oletetaan, että haluamme selittää jonkin selitettävän muuttujan havaittujen arvojen vaihtelun selittävien muuttujien havaittujen arvojen vaihtelun avulla.
Luento 8: Epälineaarinen optimointi
 Luento 8: Epälineaarinen optimointi Vektoriavaruus R n R n on kaikkien n-jonojen x := (x,..., x n ) joukko. Siis R n := Määritellään nollavektori 0 = (0,..., 0). Reaalisten m n-matriisien joukkoa merkitään
Luento 8: Epälineaarinen optimointi Vektoriavaruus R n R n on kaikkien n-jonojen x := (x,..., x n ) joukko. Siis R n := Määritellään nollavektori 0 = (0,..., 0). Reaalisten m n-matriisien joukkoa merkitään
Matematiikan tukikurssi
 Matematiikan tukikurssi Kurssikerta 10 1 Lokaalit ääriarvot Yhden muuttujan funktion f (x) lokaali maksimi on piste x 0, jossa f (x) on suurempi kuin muualle pisteen x 0 ympäristössä, eli kun f (x 0 )
Matematiikan tukikurssi Kurssikerta 10 1 Lokaalit ääriarvot Yhden muuttujan funktion f (x) lokaali maksimi on piste x 0, jossa f (x) on suurempi kuin muualle pisteen x 0 ympäristössä, eli kun f (x 0 )
Ultraäänen kuvausartefaktat. UÄ-kuvantamisen perusoletukset. Outi Pelkonen OYS, Radiologian Klinikka 29.4.2005
 Ultraäänen kuvausartefaktat Outi Pelkonen OYS, Radiologian Klinikka 29.4.2005 kaikissa radiologisissa kuvissa on artefaktoja UÄ:ssä artefaktat ovat kaikuja, jotka näkyvät kuvassa, mutta eivät vastaa sijainniltaan
Ultraäänen kuvausartefaktat Outi Pelkonen OYS, Radiologian Klinikka 29.4.2005 kaikissa radiologisissa kuvissa on artefaktoja UÄ:ssä artefaktat ovat kaikuja, jotka näkyvät kuvassa, mutta eivät vastaa sijainniltaan
Ratkaisuehdotukset LH 8 / vko 47
 Ratkaisuehdotukset LH 8 / vko 47 Tehtävä 1: Olkoot A R n n matriisi, jonka singulaariarvohajotelma on A [ ] [ ] Σ U 1 U r 0 [V1 ] T 2 V 0 0 2 Jossa Σ r on kääntyvä matriisi, [ U 1 U 2 ] ja [ V1 V 2 ] ovat
Ratkaisuehdotukset LH 8 / vko 47 Tehtävä 1: Olkoot A R n n matriisi, jonka singulaariarvohajotelma on A [ ] [ ] Σ U 1 U r 0 [V1 ] T 2 V 0 0 2 Jossa Σ r on kääntyvä matriisi, [ U 1 U 2 ] ja [ V1 V 2 ] ovat
Oletetaan ensin, että tangenttitaso on olemassa. Nyt pinnalla S on koordinaattiesitys ψ, jolle pätee että kaikilla x V U
 HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi II, syksy 018 Harjoitus 4 Ratkaisuehdotukset Tehtävä 1. Olkoon U R avoin joukko ja ϕ = (ϕ 1, ϕ, ϕ 3 ) : U R 3 kaksiulotteisen C 1 -alkeispinnan
HY / Matematiikan ja tilastotieteen laitos Vektorianalyysi II, syksy 018 Harjoitus 4 Ratkaisuehdotukset Tehtävä 1. Olkoon U R avoin joukko ja ϕ = (ϕ 1, ϕ, ϕ 3 ) : U R 3 kaksiulotteisen C 1 -alkeispinnan
9. Vektorit. 9.1 Skalaarit ja vektorit. 9.2 Vektorit tasossa
 9. Vektorit 9.1 Skalaarit ja vektorit Skalaari on koon tai määrän mitta. Tyypillinen esimerkki skalaarista on massa. Lukumäärä on toinen hyvä esimerkki skalaarista. Vektorilla on taas suuruus ja suunta.
9. Vektorit 9.1 Skalaarit ja vektorit Skalaari on koon tai määrän mitta. Tyypillinen esimerkki skalaarista on massa. Lukumäärä on toinen hyvä esimerkki skalaarista. Vektorilla on taas suuruus ja suunta.
SGN-1200 Signaalinkäsittelyn menetelmät, Tentti
 SG-1200 Signaalinkäsittelyn menetelmät, Tentti 30.1.2006 Kirjoita nimesi ja opiskelijanumerosi jokaiseen paperiin. Vastauspaperit tullaan irrottamaan toisistaan. Jos tila ei riitä, jatka kääntöpuolelle
SG-1200 Signaalinkäsittelyn menetelmät, Tentti 30.1.2006 Kirjoita nimesi ja opiskelijanumerosi jokaiseen paperiin. Vastauspaperit tullaan irrottamaan toisistaan. Jos tila ei riitä, jatka kääntöpuolelle
Äänen eteneminen ja heijastuminen
 Äänen ominaisuuksia Ääni on ilmamolekyylien tihentymiä ja harventumia. Aaltoliikettä ja värähtelyä. Värähtelevä kappale synnyttää ääntä. Pistemäinen äänilähde säteilee pallomaisesti ilman esteitä. Käytännössä
Äänen ominaisuuksia Ääni on ilmamolekyylien tihentymiä ja harventumia. Aaltoliikettä ja värähtelyä. Värähtelevä kappale synnyttää ääntä. Pistemäinen äänilähde säteilee pallomaisesti ilman esteitä. Käytännössä
1. Etsi seuraavien funktioiden kriittiset pisteet ja tutki niiden laatu: (a.) f(x,y) = 20x 2 +10xy +5y 2 (b.) f(x,y) = 4x 2 2y 2 xy +x+2y +100
 f(x,y) = 20x 2 +10xy +5y 2 (b.) f(x,y) = 4x 2 2y 2 xy +x+2y +100") HARJOITUS, RATKAISUEHDOTUKSET, YLE 07.. Etsi seuraavien funktioiden kriittiset pisteet ja tutki niiden laatu: (a.) f(x,y) = 0x +0xy +5y (b.) f(x,y) = 4x y xy +x+y +00 (a.) Funktion kriittiset pisteet ratkaisevat
HARJOITUS, RATKAISUEHDOTUKSET, YLE 07.. Etsi seuraavien funktioiden kriittiset pisteet ja tutki niiden laatu: (a.) f(x,y) = 0x +0xy +5y (b.) f(x,y) = 4x y xy +x+y +00 (a.) Funktion kriittiset pisteet ratkaisevat
Virheen kasautumislaki
 Virheen kasautumislaki Yleensä tutkittava suure f saadaan välillisesti mitattavista parametreistä. Tällöin kokonaisvirhe f määräytyy mitattujen parametrien virheiden perusteella virheen kasautumislain
Virheen kasautumislaki Yleensä tutkittava suure f saadaan välillisesti mitattavista parametreistä. Tällöin kokonaisvirhe f määräytyy mitattujen parametrien virheiden perusteella virheen kasautumislain
Talousmatematiikan perusteet: Luento 13. Rajoittamaton optimointi Hessen matriisi Ominaisarvot ja vektorit Ääriarvon laadun tarkastelu
 Talousmatematiikan perusteet: Luento 13 Rajoittamaton optimointi Hessen matriisi Ominaisarvot ja vektorit Ääriarvon laadun tarkastelu Viime luennolla Aloimme tarkastella yleisiä, usean muuttujan funktioita
Talousmatematiikan perusteet: Luento 13 Rajoittamaton optimointi Hessen matriisi Ominaisarvot ja vektorit Ääriarvon laadun tarkastelu Viime luennolla Aloimme tarkastella yleisiä, usean muuttujan funktioita
Avaruuden kolme sellaista pistettä, jotka eivät sijaitse samalla suoralla, määräävät
 11 Taso Avaruuden kolme sellaista pistettä, jotka eivät sijaitse samalla suoralla, määräävät tason. Olkoot nämä pisteet P, B ja C. Merkitään vaikkapa P B r ja PC s. Tällöin voidaan sanoa, että vektorit
11 Taso Avaruuden kolme sellaista pistettä, jotka eivät sijaitse samalla suoralla, määräävät tason. Olkoot nämä pisteet P, B ja C. Merkitään vaikkapa P B r ja PC s. Tällöin voidaan sanoa, että vektorit
Talousmatematiikan perusteet: Luento 9
 Talousmatematiikan perusteet: Luento 9 Vektorien peruslaskutoimitukset Lineaarinen riippumattomuus Vektorien sisätulo ja pituus Vektorien välinen kulma Motivointi Tähän asti olemme tarkastelleet yhden
Talousmatematiikan perusteet: Luento 9 Vektorien peruslaskutoimitukset Lineaarinen riippumattomuus Vektorien sisätulo ja pituus Vektorien välinen kulma Motivointi Tähän asti olemme tarkastelleet yhden
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS PELIPUU PELIPUU -1 0 1 PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU I -ARVO(Solmu) if LOPPUTILA(Solmu) return(arvo(solmu))
JOHDATUS TEKOÄLYYN TEEMU ROOS PELIPUU PELIPUU -1 0 1 PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU PELIPUU I -ARVO(Solmu) if LOPPUTILA(Solmu) return(arvo(solmu))
SGN-4200 Digitaalinen Audio Harjoitustyö-info
 1 SGN-4200 Digitaalinen Audio Harjoitustyö-info 04.04.2012 Joonas Nikunen Harjoitystyö - 2 Suorittaminen ja Käytännöt Kurssin pakollinen harjoitustyö: Harjoitellaan audiosignaalinkäsittelyyn tarkoitetun
1 SGN-4200 Digitaalinen Audio Harjoitustyö-info 04.04.2012 Joonas Nikunen Harjoitystyö - 2 Suorittaminen ja Käytännöt Kurssin pakollinen harjoitustyö: Harjoitellaan audiosignaalinkäsittelyyn tarkoitetun
JOHDATUS ELEKTRONIIKKAAN. Oppitunti 2 Elektroniikan järjestelmät
 JOHDATUS ELEKTRONIIKKAAN Oppitunti 2 Elektroniikan järjestelmät 2 ELEKTRONIIKAN JÄRJESTELMÄT Aktiivisuusranneke Mittaa liikettä Keskustelee käyttäjän kanssa ledeillä ja värinällä Keskustelee radioiden
JOHDATUS ELEKTRONIIKKAAN Oppitunti 2 Elektroniikan järjestelmät 2 ELEKTRONIIKAN JÄRJESTELMÄT Aktiivisuusranneke Mittaa liikettä Keskustelee käyttäjän kanssa ledeillä ja värinällä Keskustelee radioiden
(1.1) Ae j = a k,j e k.
 Ae j = a k,j e k.") Lineaarikuvauksen determinantti ja jälki 1. Lineaarikuvauksen matriisi. Palautetaan mieleen, mikä lineaarikuvauksen matriisi annetun kannan suhteen on. Olkoot V äärellisulotteinen vektoriavaruus, n = dim
Lineaarikuvauksen determinantti ja jälki 1. Lineaarikuvauksen matriisi. Palautetaan mieleen, mikä lineaarikuvauksen matriisi annetun kannan suhteen on. Olkoot V äärellisulotteinen vektoriavaruus, n = dim
Talousmatematiikan perusteet: Luento 15. Rajoitettu optimointi Lagrangen menetelmä Lagrangen kerroin ja varjohinta
 Talousmatematiikan perusteet: Luento 15 Rajoitettu optimointi Lagrangen menetelmä Lagrangen kerroin ja varjohinta Viime luennolla Tarkastelimme usean muuttujan funktioiden rajoittamatonta optimointia:
Talousmatematiikan perusteet: Luento 15 Rajoitettu optimointi Lagrangen menetelmä Lagrangen kerroin ja varjohinta Viime luennolla Tarkastelimme usean muuttujan funktioiden rajoittamatonta optimointia:
Lineaarikuvauksen R n R m matriisi
 Lineaarikuvauksen R n R m matriisi Lauseessa 21 osoitettiin, että jokaista m n -matriisia A vastaa lineaarikuvaus L A : R n R m, jolla L A ( v) = A v kaikilla v R n. Osoitetaan seuraavaksi käänteinen tulos:
Lineaarikuvauksen R n R m matriisi Lauseessa 21 osoitettiin, että jokaista m n -matriisia A vastaa lineaarikuvaus L A : R n R m, jolla L A ( v) = A v kaikilla v R n. Osoitetaan seuraavaksi käänteinen tulos:
Kuvanlaadunparantaminen. Mikko Nuutinen 21.3.2013
 Kuvanlaadunparantaminen Mikko Nuutinen 21.3.2013 Luennon sisältö Termistöä Kuvanentisöinti Terävyys unsharp masking Kohina non-local means Linssivääristymän korjaus Kuvanlaadunehostaminen Kontrasti Auto-levels
Kuvanlaadunparantaminen Mikko Nuutinen 21.3.2013 Luennon sisältö Termistöä Kuvanentisöinti Terävyys unsharp masking Kohina non-local means Linssivääristymän korjaus Kuvanlaadunehostaminen Kontrasti Auto-levels
Lue käyttöohje huolellisesti läpi ennen tuotteen käyttöönottoa.
 KÄYTTÖOHJE 1 (5) VAROITUKSET Lue käyttöohje huolellisesti läpi ennen tuotteen käyttöönottoa. HUOMIO! Laite ei sovellu alle 3-vuotiaille lapsille. Sisältää pieniä osia - Tukehtumisvaara. Pidä huoli ettei
KÄYTTÖOHJE 1 (5) VAROITUKSET Lue käyttöohje huolellisesti läpi ennen tuotteen käyttöönottoa. HUOMIO! Laite ei sovellu alle 3-vuotiaille lapsille. Sisältää pieniä osia - Tukehtumisvaara. Pidä huoli ettei
HARJOITUS 7 SEISOVAT AALLOT TAVOITE
 SEISOVAT AALLOT TAVOITE Tässä harjoituksessa opit käyttämään rakolinjaa. Toteat myös seisovan aallon kuvion kolmella eri kuormalla: oikosuljetulla, sovittamattomalla ja sovitetulla kuormalla. Tämän lisäksi
SEISOVAT AALLOT TAVOITE Tässä harjoituksessa opit käyttämään rakolinjaa. Toteat myös seisovan aallon kuvion kolmella eri kuormalla: oikosuljetulla, sovittamattomalla ja sovitetulla kuormalla. Tämän lisäksi
Esimerkki 19. Esimerkissä 16 miniminormiratkaisu on (ˆx 1, ˆx 2 ) = (1, 0).
 = (1, 0).") Esimerkki 9 Esimerkissä 6 miniminormiratkaisu on (ˆx, ˆx (, 0 Seuraavaksi näytetään, että miniminormiratkaisuun siirtyminen poistaa likimääräisongelman epäyksikäsitteisyyden (mutta lisääntyvän ratkaisun
Esimerkki 9 Esimerkissä 6 miniminormiratkaisu on (ˆx, ˆx (, 0 Seuraavaksi näytetään, että miniminormiratkaisuun siirtyminen poistaa likimääräisongelman epäyksikäsitteisyyden (mutta lisääntyvän ratkaisun
Vektorien pistetulo on aina reaaliluku. Esimerkiksi vektorien v = (3, 2, 0) ja w = (1, 2, 3) pistetulo on
 ja w = (1, 2, 3) pistetulo on") 13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
ANSSE SAARIMÄKI KAMERAPOHJAINEN PAIKANNUS. Kandidaatintyö
 ANSSE SAARIMÄKI KAMERAPOHJAINEN PAIKANNUS Kandidaatintyö Tarkastaja: Yliopistonlehtori Heikki Huttunen Jätetty tarkastettavaksi 21.5.2015 I TIIVISTELMÄ ANSSE SAARIMÄKI: Kamerapohjainen paikannus Tampereen
ANSSE SAARIMÄKI KAMERAPOHJAINEN PAIKANNUS Kandidaatintyö Tarkastaja: Yliopistonlehtori Heikki Huttunen Jätetty tarkastettavaksi 21.5.2015 I TIIVISTELMÄ ANSSE SAARIMÄKI: Kamerapohjainen paikannus Tampereen
Matriisilaskenta Laskuharjoitus 1 - Ratkaisut / vko 37
 Matriisilaskenta Laskuharjoitus 1 - Ratkaisut / vko 37 Tehtävä 1: Käynnistä Matlab-ohjelma ja kokeile laskea sillä muutama peruslaskutoimitus: laske jokin yhteen-, vähennys-, kerto- ja jakolasku. Laske
Matriisilaskenta Laskuharjoitus 1 - Ratkaisut / vko 37 Tehtävä 1: Käynnistä Matlab-ohjelma ja kokeile laskea sillä muutama peruslaskutoimitus: laske jokin yhteen-, vähennys-, kerto- ja jakolasku. Laske