PD-säädin PID PID-säädin
|
|
|
- Amanda Kyllönen
- 10 vuotta sitten
- Katselukertoja:
Transkriptio
1 -äädin - äätö on ykinkertainen äätömuoto, jota voidaan kutua myö uhteuttavaki äädöki. Sinä lähtöignaali on uoraa uhteea tuloignaalin. -äätimen uhdealue kertoo kuinka paljon mittauuure aa muuttua ennen kuin ohjauuure muuttuu täydet 100%. Mittauanturin muuttuea 20% mittaualueeta ja äätöventtiilin muuttuea 100% on uhdealue Xp= 20%. Vahvitu kertoo aman aian käänteieti. -äätö jättää herkäti pyyvän poikkeaman. Tämä tarkoittaa itä, että pinnankorkeuden äädöä netepinta aattaa jäädä pyyväti lian ala tai lian ylö. Venttiili voi olla täyin auki vain, kun erouure on uuri eli pinta on hyvin alhaalla. Lähtövirtauken ollea uuri pinta on jatkuvati alhaalla. Suhdealuetta voidaan pienentää äätämällä reagointi herkemmäki kavattamalla p:n arvoa. Tämä aattaa kuitenkin johtaa iihen että äätöpiri alkaa värähdellä. I-äädin I-äätö tulee anoita Integral action ja e toimii nimenä mukaieti. Ykikköakeleen uuruien erouureen yntyeä alkaa ohjauuure lakea erouureen pintaalaa eli integroida. Ohjauuure muuttuu niin kauan, kuin erouure on olemaa. Erouureen menneä nollaan jää ohjauuure vakioarvoon pyyen inä kunne erouure muuttuu. Erouureen ollea negatiivinen ohjauuure pienenee vakionopeudella niin kauan kunne erouure muuttuu.

2 I-äätimen toiminta I-äätimen integrointiaika riippuu Ti:n uuruudeta ja e voidaan määrittää euraamalla ohjauuuretta erouureen ollea yki. Integrointi-aika on kulunut kun ohjauuure Ti on aavuttanut ykköen. I-äädöä ei voi yntyä pyyvää poikkeamaa kuten -äädöä, koka äädin ajaa ohjauuuretta jatkuvati erouuretta pienentävään uuntaan. I-äädintä ei käytetä ykinään toimilaiteen ohjaamieen.

3 I-äädin Säätimet I-äätö on hyvin yleinen äätömuoto. I-äätö toimi älykkääti illä e tietää erouureen uuruuden, uunnan ja ketoajan. Erouureen ollea eriuuri kuin nolla alkaa ohjauuure :n vaikutuketa ajaa heti eroa korjaavaan uuntaan. Samalla I:n vaikutuketa eroa pienennetään, kunne erouure on lopulta nolla. uvaa näkyy I- äätimen toiminta akelvatekokeea. Erouureen ollea 1 nouee ohjauuure y välittömäti arvoon 1 :n vaikutuketa. Samalla alkaa I- vaikutu muuttamaan ohjauuuretta ennalta äädetyn Ti:n määrittämällä nopeudella, jolloin ohjauuure aavuttaa makimiarvona.

4 D-äädin D-äätö on ennakoiva äätötapa ja tulee anoita derivative action. D-äätö reagoi toimintatapana mukaieti hyvin nopeati ja aggreiivieti yntyvään erouureeeen. uvaa nähdään äätimen nopea reagointi, joa D-äätimen lähtö nouee välittömäti valittuun makimiarvoona ja palaa nollaan derivointiajan Td kuluea. Mitä pienemmäki derivointiaika Td on aetettu, itä nopeammin ohjauuure palautuu nolaan. Erouureen kavaea vakionopeudella, äilyy ohjauuure, kunne erouureen kavu päättyy. D-äädintä ei käytetä ykinään.

5 D-äädin Säätimet D-äädin on yhditetty äätömuoto, joa erouureeeen reagointi on nopeaa. Erouureen yntyeä ohjauarvo y ajetaan makimiarvoona, jota e palaa - äädön määrittämälle taolle. uvaa nähdään D-äätimen nopea reagointi. D- äädin on käytännöä harvinainen. ID-äädin D ID-äädintä käytetään paljon proeien ohjaukea ja en etuna on I-äätöä nopeampi reagointi muuttuvaan erouureeeen. uvaa nähdään miten ohjauuure reagoi nopeati erouureen muutokeen ja lakee ieltä vahvituken ja integroinnin I määrittämälle taolle D:n määrittämällä nopeudella. ID

6 Säätimien iirtofunktiot -äädin I-äädin I-äädin D-äädin ID-äädin C C = ( C I C = ( T C I I I C 1/ ( ( ( = = = 1 (1 (1 ( T T C D I D I D I C = = = (1 ( T C D D C = =

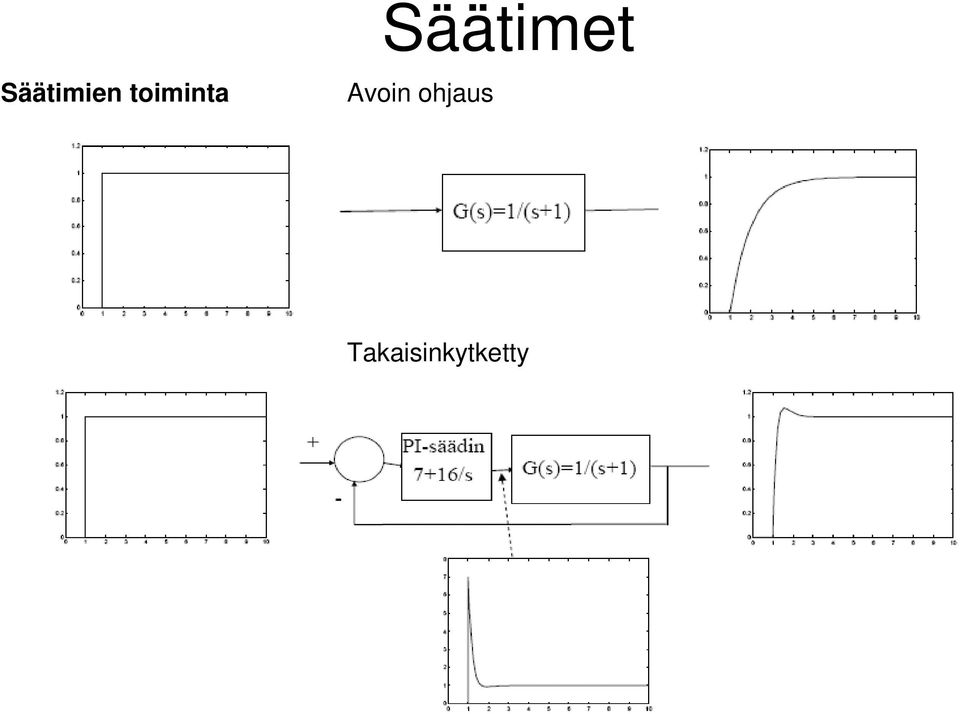
7 Säätimien toiminta Avoin ohjau Takaiinkytketty
8 ID-äädin Tavoitteena on löytää opivat (parhaimmat arvot äätimen vahvitukelle p, integrointiajalle TI ja derivointiajalle TD iten että ohjattava uure y(t euraa aetuarvoa r(t parhaimmalla mahdolliella tavalla haluttujen kriteerien mukaieti (eim. nopea vate, ei pyyvää poikkeamaa jne.

9 -, I- ja D-oien vaikutuketa äätöön Vahvituken notaminen (uhdeäätö: - liää nopeutta (ja kaitanleveyttä - pienentää (yleenä vaihevaraa - liää proentuaalita ylitytä ja värähtelyä Integrointiajan TI lyhentäminen (integroiva äätö: - liää tarkkuutta - pienentää vaihevaraa - liää taipumuta värähtelyyn Derivointiajan TD kavattaminen (derivoiva äätö: - liää kaitanleveyttä ja liää (yleenä vaihevaraa - pienentää proentuaalita ylitytä - pienentää värähtelyä

10 yyvä poikkema Tarkatellaan nyt vatetta hieman pidemmän ajan kuluttua, kun nollaohjauvate on jo ehtinyt hävitä. Jo erouure, eli todellien vateen ja referenin erotu, ei mene nollaan ajan kavaea äärettömäki, niin vateeeen jää pyyvä poikkeama. Se on mielekä käite vain järjetelmille, joiden on tarkoitu eurata tarkati refereniä ja joiden nollaohjauvate lähetyy nollaa. yyvää poikkeamaa tarkatellaan yleenä akel-, penger- ja paraabeliherätteillä, mutta käite on laajennettavia kaikille polynomiherätteille. Jo vateeeen jää pyyvä poikkeama akelherätteellä, anotaan järjetelmän olevan tyyppiä nolla. Jo akelvateen erouure menee nollaan, mutta pengervateeeen jää poikkeama, niin järjetelmä on tyyppiä yki ja vataavati, jo ainoataan paraabeliherätteellä jää poikkeama, niin järjetelmä on tyyppiä kaki. Tyypin (eli proeiluokan näkee myö avoimen ilmukan iirtofunktiota. Jo illä on k-kertainen napa origoa niin yteemi on tyyppiä k. Jo origoa ei ole yhtään napaa, niin yteemi on tyyppiä nolla.

11 roeiluokat ja pyyvät poikkeamat liittyvät toiiina euraavan taulukon mukaieti. Taulukon vakiot p, v ja a määritellään avoimen ilmukan iirtofunktion raja-arvoina: yyvä poikkeama voidaan poitaa notamalla proeiluokkaa, mutta varinkin tyypin kaki ja itä korkeampia äädettyjä järjetelmiä on uein vaikea aada tabiiliki ja nopeaki.

12 yyvän poikkeaman poitaminen Säätimet Telekoopin on tarkoitu eurata kiinteäti komeettaa, joka kulkee vakiokulmanopeudella 0,05 rad/ taivaankannen poikki. Telekoopin kulmanopeutta muutetaan moottorilla, jonka iirtofunktio on: ulmanopeudeta aadaan kulma integroimalla. Säätimenä on -äädin. Avoimen ilmukan iirtofunktio on tyyppiä yki, eli pengerherätteellä (komeetta liikkuu vakiokulmanopeudella vateeeen jää pyyvä poikkeama. äytännöä tämä tarkoittaa, että telekoopin kulma kääntyy oikealla nopeudella, mutta komeetta on jatkuvati hieman ivua telekoopin kekikohdata.

13 Ilman proeiluokan muutota pyyvää poikkeamaa ei aada täyin poitettua. Sitä voidaan kyllä pienentää muuttamalla äätimen vahvituta iten, että vakio v (k. yllä kavaa. Vaihdetaan äätimeki I-äädin viritykellä = I =, mikä notaa proeiluokkaa ja poitaa pyyvän poikkeaman kokonaan. Muutoken jälkeen avoimen ilmukan iirtofunktio on

14 Säätimien taajuuvateet Vaihtoehtoinen tapa äätimen vaikutukien tutkimieen nolla-napakuvion ja juuriuran liäki on käitellä niitä taajuutaoa. Säätimien vahvitu ja vaihe-ero ovat erilaiia eri taajuukilla, joten opivalla äätimellä voidaan järjetelmän taajuuvatetta muuttaa haluttuun uuntaan. Muita, että Boden diagrammia järjetelmän ja äätimen vahvitu- ja vaihekäyrät voi ykinkertaieti lakea yhteen. aitanleveyden kavattaminen tarkoittaa nopeampaa vatetta aikataoa ja vahvituken notaminen pienillä taajuukilla parantaa jatkuvan tilan vateen refenin eurantaominaiuuki eli pienentää pyyvää poikkeamaa. Sopivata kohdata notettu vaihe-erokäyrä liää vaihevaraa. -äädin -äädin ei muuta vaihe-eroa, mutta kavattaa vahvituta 20 lg deibeliä.

15 D-äädin D-äädin notaa vahvitukäyrää 1/T D :tä uuremmilla taajuukilla ja vaiheerokäyrää 0,1/T D :tä uuremmilla taajuukilla. I-äädin I-äädin notaa vahvitukäyrää 1/TI:tä pienemmillä taajuukilla ja lakee vaihekäyrää 10/TI:tä pienemmillä taajuukilla. I-äädin korotaa pienten taajuukien toitumita ja ii pienentää pyyvää poikkeamaa. uitenkaan e ei nota vahvituta uurilla taajuukilla, joten e ei dramaattieti pienennä vahvituvaraa.

16 ID-äädin ID-äätimen vaihevate on yhditelmä kahdeta edellietä. Vahvitukäyrä nouee pienillä ja uurilla taajuukilla. Vaihekäyrä lakee pienillä ja nouee uurilla taajuukilla.

Intensiteettitaso ja Doplerin ilmiö
 Inteniteettitao ja Doplerin ilmiö Tehtävä Erkki työkentelee airaalaa. Sairaalalta 6,0 km päää on tapahtunut tieliikenneonnettomuu ja onnettomuupaikalta lähteneen ambulanin ireenin ääni kuuluu Erkille 60,0
Inteniteettitao ja Doplerin ilmiö Tehtävä Erkki työkentelee airaalaa. Sairaalalta 6,0 km päää on tapahtunut tieliikenneonnettomuu ja onnettomuupaikalta lähteneen ambulanin ireenin ääni kuuluu Erkille 60,0
4.3 Liikemäärän säilyminen
 Tämän kappaleen aihe liikemäärän äilyminen törmäykiä. Törmäy on uora ja kekeinen, jo törmäävät kappaleet liikkuvat maakekipiteitten kautta kulkevaa uoraa pitkin ja jo törmäykohta on tällä amalla uoralla.
Tämän kappaleen aihe liikemäärän äilyminen törmäykiä. Törmäy on uora ja kekeinen, jo törmäävät kappaleet liikkuvat maakekipiteitten kautta kulkevaa uoraa pitkin ja jo törmäykohta on tällä amalla uoralla.
KUINKA PALJON VAROISTA OSAKKEISIIN? Mika Vaihekoski, professori. Lappeenrannan teknillinen yliopisto
 KUINKA PALJON VAROISTA OSAKKEISIIN? Mika Vaihekoki, proeori Lappeenrannan teknillinen yliopito Näin uuden vuoden alkaea ueat meitä miettivät ijoitualkkuna kootumuta. Yki kekeiitä kyymykitä on päätö eri
KUINKA PALJON VAROISTA OSAKKEISIIN? Mika Vaihekoki, proeori Lappeenrannan teknillinen yliopito Näin uuden vuoden alkaea ueat meitä miettivät ijoitualkkuna kootumuta. Yki kekeiitä kyymykitä on päätö eri
7. Pyörivät sähkökoneet
 Pyörivät ähkökoneet 7-1 7. Pyörivät ähkökoneet Mekaanien energian muuntamieen ähköenergiaki ekä ähköenergian muuntamieen takaiin mekaanieki energiaki käytetään ähkökoneita. Koneita, jotka muuntavat mekaanien
Pyörivät ähkökoneet 7-1 7. Pyörivät ähkökoneet Mekaanien energian muuntamieen ähköenergiaki ekä ähköenergian muuntamieen takaiin mekaanieki energiaki käytetään ähkökoneita. Koneita, jotka muuntavat mekaanien
RATKAISUT: 3. Voimakuvio ja liikeyhtälö
 Phyica 9. paino (8) 3. Voiakuvio ja liikeyhtälö : 3. Voiakuvio ja liikeyhtälö 3. a) Newtonin I laki on nieltään jatkavuuden laki. Kappale jatkaa liikettään uoraviivaieti uuttuattoalla nopeudella tai pyyy
Phyica 9. paino (8) 3. Voiakuvio ja liikeyhtälö : 3. Voiakuvio ja liikeyhtälö 3. a) Newtonin I laki on nieltään jatkavuuden laki. Kappale jatkaa liikettään uoraviivaieti uuttuattoalla nopeudella tai pyyy
Tehtävä 1. Vaihtoehtotehtävät.
 Kem-9.7 Proeiautomaation peruteet Perutehtävät Tentti 9.. Tehtävä. Vaihtoehtotehtävät. Oikea vatau,p, väärä vatau -,p ja ei vatauta p Makimi,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA TENTIN
Kem-9.7 Proeiautomaation peruteet Perutehtävät Tentti 9.. Tehtävä. Vaihtoehtotehtävät. Oikea vatau,p, väärä vatau -,p ja ei vatauta p Makimi,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA TENTIN
RATKAISUT: 8. Momentti ja tasapaino
 Phyica 9. paino (7) : 8. Voian vari r on voian vaikutuuoran etäiyy pyöriiakelita. Pyöriiakeli on todellinen tai kuviteltu akeli, jonka ypäri kappale pyörii. Voian oentti M kuvaa voian vääntövaikututa tietyn
Phyica 9. paino (7) : 8. Voian vari r on voian vaikutuuoran etäiyy pyöriiakelita. Pyöriiakeli on todellinen tai kuviteltu akeli, jonka ypäri kappale pyörii. Voian oentti M kuvaa voian vääntövaikututa tietyn
SMG-4200 Sähkömagneettisten järjestelmien lämmönsiirto Harjoituksen 1 ratkaisuehdotukset
 SMG-4200 Sähkömagneettiten järjetelmien lämmöniirto Harjoituken 1 ratkaiuehdotuket Vata 1800-luvun puoliväliä ymmärrettiin että lämpöenergia on atomien ja molekyylien atunnaieen liikkeeeen värähtelyyn
SMG-4200 Sähkömagneettiten järjetelmien lämmöniirto Harjoituken 1 ratkaiuehdotuket Vata 1800-luvun puoliväliä ymmärrettiin että lämpöenergia on atomien ja molekyylien atunnaieen liikkeeeen värähtelyyn
12. ARKISIA SOVELLUKSIA
 MAA. Arkiia ovellukia. ARKISIA SOVELLUKSIA Oleeaan, eä kappale liikkuu ykiuloeia raaa, eimerkiki -akelia pikin. Kappaleen nopeuden vekoriluonne riiää oaa vauhdin eumerkin avulla huomioon, ja on ehkä arkoiukenmukaiina
MAA. Arkiia ovellukia. ARKISIA SOVELLUKSIA Oleeaan, eä kappale liikkuu ykiuloeia raaa, eimerkiki -akelia pikin. Kappaleen nopeuden vekoriluonne riiää oaa vauhdin eumerkin avulla huomioon, ja on ehkä arkoiukenmukaiina
Fy07 Koe Kuopion Lyseon lukio (KK) 1 / 5
 1 / 5") y07 Koe 8.9.05 Kuopion yeon lukio (KK) / 5 Vataa kolmeen tehtävään. Vatuken reitani on 60, käämin induktani on 0,60 H ja reitani 8 ja kondenaattorin kapaitani on 80. Komponentit ovat arjaan kytkettyinä
y07 Koe 8.9.05 Kuopion yeon lukio (KK) / 5 Vataa kolmeen tehtävään. Vatuken reitani on 60, käämin induktani on 0,60 H ja reitani 8 ja kondenaattorin kapaitani on 80. Komponentit ovat arjaan kytkettyinä
HY / Matematiikan ja tilastotieteen laitos Tilastollinen päättely II, kevät 2017 Harjoitus 4 Ratkaisuehdotuksia. Tehtäväsarja I
 HY / Matematiikan ja tilatotieteen laito Tilatollinen päättely II, kevät 207 Harjoitu 4 Ratkaiuehdotukia Tehtäväarja I. (Kvantiili-kvantiili kuvion [engl. q q plot] idea.) Olkoon atunnaimuuttujalla X ellainen
HY / Matematiikan ja tilatotieteen laito Tilatollinen päättely II, kevät 207 Harjoitu 4 Ratkaiuehdotukia Tehtäväarja I. (Kvantiili-kvantiili kuvion [engl. q q plot] idea.) Olkoon atunnaimuuttujalla X ellainen
ELEC-C1230 Säätötekniikka. Luku 4: Lohkokaaviomuunnokset, PID-säädin ja kompensaattorit,
 ELEC-C1230 Säätötekniikka Luku 4: Lohkokaaviomuunnoket, PID-äädin ja kompenaattorit, Järjetelmien kokoaminen oayteemeitä Edelliillä luennoilla on tarkateltu ykittäiiä ilmiöitä ja niiden malleja (luento
ELEC-C1230 Säätötekniikka Luku 4: Lohkokaaviomuunnoket, PID-äädin ja kompenaattorit, Järjetelmien kokoaminen oayteemeitä Edelliillä luennoilla on tarkateltu ykittäiiä ilmiöitä ja niiden malleja (luento
Kertausosa. 2. Kuvaan merkityt kulmat ovat samankohtaisia kulmia. Koska suorat s ja t ovat yhdensuuntaisia, kulmat ovat yhtä suuria.
 5. Veitoken tilavuu on V,00 m 1,00 m,00 m 6,00 m. Pienoimallin tilavuu on 1 V malli 6,00 m 0,06m. 100 Mittakaava k aadaan tälötä. 0,06 1 k 6,00 100 1 k 0,1544... 100 Mitat ovat. 1,00m 0,408...m 100 0,41
5. Veitoken tilavuu on V,00 m 1,00 m,00 m 6,00 m. Pienoimallin tilavuu on 1 V malli 6,00 m 0,06m. 100 Mittakaava k aadaan tälötä. 0,06 1 k 6,00 100 1 k 0,1544... 100 Mitat ovat. 1,00m 0,408...m 100 0,41
Triathlon Training Programme 12-week Sprint Beginner
 12 viikon kilpailuuunnitelma--kilpailumatka: printti Urheilijan tao: aloitteleva urheilija, 1 tai 2 vuoden kokemu printtitriathlonkilpailuita Tunteja viikoa: 5-6 Tätä harjoituuunnitelmaa käytetään Garminin
12 viikon kilpailuuunnitelma--kilpailumatka: printti Urheilijan tao: aloitteleva urheilija, 1 tai 2 vuoden kokemu printtitriathlonkilpailuita Tunteja viikoa: 5-6 Tätä harjoituuunnitelmaa käytetään Garminin
LUKION FYSIIKKAKILPAILU 8.11.2005 avoimen sarjan vast AVOIN SARJA
 LKION FYSIIKKAKILPAIL 8..5 avoien arjan vat AVOIN SARJA Kirjoita tektaten koepaperiin oa niei, kotiooitteei, ähköpotiooitteei, opettajai nii ekä koului nii. Kilpailuaikaa on inuuttia. Sekä tehtävä- että
LKION FYSIIKKAKILPAIL 8..5 avoien arjan vat AVOIN SARJA Kirjoita tektaten koepaperiin oa niei, kotiooitteei, ähköpotiooitteei, opettajai nii ekä koului nii. Kilpailuaikaa on inuuttia. Sekä tehtävä- että
X 2 = k 21X 1 + U 2 s + k 02 + k 12. (s + k 02 + k 12 )U 1 + k 12 U 2. s 2 + (k 01 + k 21 + k 02 + k 12 ) s + k
U 1 + k 12 U 2. s 2 + (k 01 + k 21 + k 02 + k 12 ) s + k") Aalto-yliopiton Perutieteiden korkeakoulu Matematiikan ja yteemianalyyin laito Mat-49 Syteemien Identifiointi 0 harjoituken ratkaiut äytetään enin iirtofunktiomalli Tehdään Laplace-muunno: ẋ k 0 k x +
Aalto-yliopiton Perutieteiden korkeakoulu Matematiikan ja yteemianalyyin laito Mat-49 Syteemien Identifiointi 0 harjoituken ratkaiut äytetään enin iirtofunktiomalli Tehdään Laplace-muunno: ẋ k 0 k x +
Viikkotehtävät IV, ratkaisut
 Viikkotehtävät IV, ratkaiut. 7,40 V (pariton napajännite) I 7 ma (lampun A ähkövirta rinnankytkennää) I 5 ma (lampun B ähkövirta rinnankytkennää) a) eitani on, joten lamppujen reitanit voidaan lakea tehtävää
Viikkotehtävät IV, ratkaiut. 7,40 V (pariton napajännite) I 7 ma (lampun A ähkövirta rinnankytkennää) I 5 ma (lampun B ähkövirta rinnankytkennää) a) eitani on, joten lamppujen reitanit voidaan lakea tehtävää
Materiaalien murtuminen
 Määritelmä: Materiaalien murtuminen r Fracture i the eparation, or fragmentation, of a olid body into two or more part under the action of tre Murtumiproei voidaan jakaa kahteen oaan 4 Särön ydintyminen
Määritelmä: Materiaalien murtuminen r Fracture i the eparation, or fragmentation, of a olid body into two or more part under the action of tre Murtumiproei voidaan jakaa kahteen oaan 4 Särön ydintyminen
( ) ( ) 14 HARJOITUSTEHTÄVIÄ SÄHKÖISET PERUSSUUREET SÄHKÖVERKON PIIRIKOMPONENTIT
 ( ) 14 HARJOITUSTEHTÄVIÄ SÄHKÖISET PERUSSUUREET SÄHKÖVERKON PIIRIKOMPONENTIT") 4 HAJOTUSTHTÄVÄ SÄHKÖST PUSSUUT -auton akku (84 V, 700 mah on ladattu täyteen Kuinka uuri oa akun energiata kuluu enimmäien viiden minuutin aikana, kun oletetaan moottorin ottavan vakiovirran 5 A? Oletetaan
4 HAJOTUSTHTÄVÄ SÄHKÖST PUSSUUT -auton akku (84 V, 700 mah on ladattu täyteen Kuinka uuri oa akun energiata kuluu enimmäien viiden minuutin aikana, kun oletetaan moottorin ottavan vakiovirran 5 A? Oletetaan
7.lk matematiikka. Geometria 1. Janne Koponen versio 2.0
 7.lk matematiikka 1 Janne Koponen verio 2.0 Tämä monite on tehty 7.lk. geometrian opetukeen ja olen käyttänyt itä ite Hatanpään koulua. Jo joku opettaja haluaa tätä kuitenkin käyttää omaa opetukeaan, on
7.lk matematiikka 1 Janne Koponen verio 2.0 Tämä monite on tehty 7.lk. geometrian opetukeen ja olen käyttänyt itä ite Hatanpään koulua. Jo joku opettaja haluaa tätä kuitenkin käyttää omaa opetukeaan, on
DIGITAALISET PULSSIMODULAATIOT M JA PCM
 DIGITAALISET PULSSIMODULAATIOT M JA PCM 1 (10) Deltamodulaatio ( M) M koodaa informaation ± polariteetin omaavaki binääriiki impuleiki. Menetelmä on ykinkertainen. Idea perutuu ignaalin m(t) muutoken binäärieen
DIGITAALISET PULSSIMODULAATIOT M JA PCM 1 (10) Deltamodulaatio ( M) M koodaa informaation ± polariteetin omaavaki binääriiki impuleiki. Menetelmä on ykinkertainen. Idea perutuu ignaalin m(t) muutoken binäärieen
Äänen nopeus pitkässä tangossa
 IXPF24 Fyiikka, ryhälaboratoriotyö IST4S1 / E1 / A Okanen Janne, Vaitti Mikael, Vähäartti Pai Jyväkylän Aattikorkeakoulu, IT-intituutti IXPF24 Fyiikka, Kevät 2005, 6 ECTS Opettaja Pai Repo Äänen nopeu
IXPF24 Fyiikka, ryhälaboratoriotyö IST4S1 / E1 / A Okanen Janne, Vaitti Mikael, Vähäartti Pai Jyväkylän Aattikorkeakoulu, IT-intituutti IXPF24 Fyiikka, Kevät 2005, 6 ECTS Opettaja Pai Repo Äänen nopeu
Tarpeenmukainen ilmanvaihto
 YLEISKUVAUS Tarpeenmukainen ilmanvaihto Huipputuotteet tarpeenmukaieen ilmanvaihtoon! www.wegon.com Tarpeenmukainen ilmanvaihto tarjoaa hyvän viihtyiyyden ja pienet käyttökutannuket Kun huone on käytöä,
YLEISKUVAUS Tarpeenmukainen ilmanvaihto Huipputuotteet tarpeenmukaieen ilmanvaihtoon! www.wegon.com Tarpeenmukainen ilmanvaihto tarjoaa hyvän viihtyiyyden ja pienet käyttökutannuket Kun huone on käytöä,
SYNKRONIKONEET RELUKTANS- SIKONEET RM RM RM + >>L q. L d >>L q. Harjalliset -pyörivä PMSM upotetu magneetit
 7.48 TY Juha Pyrhönen 7. Tahtikone Tahtikoneet muootavat kokonaien ähkökoneperheen. Päätyyppejä ovat vieramagnetoiut tahtikoneet, ynkroniet reluktanikoneet ja ketomagneettitahtikoneet. Vieramagnetoiut
7.48 TY Juha Pyrhönen 7. Tahtikone Tahtikoneet muootavat kokonaien ähkökoneperheen. Päätyyppejä ovat vieramagnetoiut tahtikoneet, ynkroniet reluktanikoneet ja ketomagneettitahtikoneet. Vieramagnetoiut
b) Laskiessani suksilla mäkeä alas ja hypätessäni laiturilta järveen painovoima tekee työtä minulle.
 Laskiessani suksilla mäkeä alas ja hypätessäni laiturilta järveen painovoima tekee työtä minulle.") nergia. Työ ja teho OHDI JA TSI -. Opettaja ja opikelija tekevät hyvin paljon aanlaita ekaanita työtä, kuten liikkuinen, kirjojen ja eineiden notainen, liikkeellelähtö ja pyähtyinen. Uuien aioiden oppiinen
nergia. Työ ja teho OHDI JA TSI -. Opettaja ja opikelija tekevät hyvin paljon aanlaita ekaanita työtä, kuten liikkuinen, kirjojen ja eineiden notainen, liikkeellelähtö ja pyähtyinen. Uuien aioiden oppiinen
Y56 Laskuharjoitukset 3 palautus ma klo 16 mennessä
 1 Y6 Lakuharjoituket 3 alautu ma 3.. klo 16 menneä Harjoitu 1. Lue enin Vihmo, Jouni (006) Alkoholijuomien hintajoutot uomea vuoina 199 00, Yhteikuntaolitiikka 71, 006/1 ivut 9 ja vataa itten kyymykiin.
1 Y6 Lakuharjoituket 3 alautu ma 3.. klo 16 menneä Harjoitu 1. Lue enin Vihmo, Jouni (006) Alkoholijuomien hintajoutot uomea vuoina 199 00, Yhteikuntaolitiikka 71, 006/1 ivut 9 ja vataa itten kyymykiin.
Kahdeksansolmuinen levyelementti
 Levy8 ja RS hm 7.. Kahdekanolminen levyelementti akatellaan kvan kahdekanolmita levyelementtiä. q 6 y (,y q 8 ( 8,y 8 8 q 7 q 6 (,y q 5 q q q 7 q q ( 7,y 7 v ( 6,y 6 P 5 ( 5,y 5 q 9 6 q 5 (,y q (,y q q
Levy8 ja RS hm 7.. Kahdekanolminen levyelementti akatellaan kvan kahdekanolmita levyelementtiä. q 6 y (,y q 8 ( 8,y 8 8 q 7 q 6 (,y q 5 q q q 7 q q ( 7,y 7 v ( 6,y 6 P 5 ( 5,y 5 q 9 6 q 5 (,y q (,y q q
12. laskuharjoituskierros, vko 16, ratkaisut
 1. lakuharjoitukierro, vko 16, ratkaiut D1. Muuttujien x ja Y havaitut arvot ovat: x 1 3 4 6 8 9 11 14 Y 1 4 4 5 7 8 9 a) Määrää regreiomallin Y i = α +βx i +ǫ i regreiokertoimien PNS-etimaatit ja piirrä
1. lakuharjoitukierro, vko 16, ratkaiut D1. Muuttujien x ja Y havaitut arvot ovat: x 1 3 4 6 8 9 11 14 Y 1 4 4 5 7 8 9 a) Määrää regreiomallin Y i = α +βx i +ǫ i regreiokertoimien PNS-etimaatit ja piirrä
Physica 9 1. painos 1(8) 20. Varattu hiukkanen sähkö- ja magneettikentässä
 20. Varattu hiukkanen sähkö- ja magneettikentässä") Phyica 9 aino (8) 0 Varattu hiukkann ähkö- ja agnttikntää : 0 Varattu hiukkann ähkö- ja agnttikntää 0 a) Sähköknttä aikuttaa arattuun hiukkan oialla F = QE Poitiiiti aratull hiukkall oian uunta on ähkökntän
Phyica 9 aino (8) 0 Varattu hiukkann ähkö- ja agnttikntää : 0 Varattu hiukkann ähkö- ja agnttikntää 0 a) Sähköknttä aikuttaa arattuun hiukkan oialla F = QE Poitiiiti aratull hiukkall oian uunta on ähkökntän
... MOVING AHEAD. Rexnord Laatuketjut. Rullaketjut Rotary-ketjut Levykimppuketjut
 ... MOVING HED Rexnord Laatuketjut Rullaketjut Rotary-ketjut Levykimuketjut Siällyluettelo Rexnord-laadun ominaiiirteet......................... 6 7 Huomioita ketjun valinnata...........................
... MOVING HED Rexnord Laatuketjut Rullaketjut Rotary-ketjut Levykimuketjut Siällyluettelo Rexnord-laadun ominaiiirteet......................... 6 7 Huomioita ketjun valinnata...........................
C B A. Kolmessa ensimmäisessä laskussa sovelletaan Newtonin 2. ja 3. lakia.
 Jako 4: Dynamiikan peruteet jatkuu, työ ja energia Näiden tehtävien viimeinen palautu- tai näyttöpäivä on tiitaina 23.5.2017. Ektra-tehtävät vataavat kolmea tehtävää, kun kurin lopua laketaan lakuharjoitupiteitä.
Jako 4: Dynamiikan peruteet jatkuu, työ ja energia Näiden tehtävien viimeinen palautu- tai näyttöpäivä on tiitaina 23.5.2017. Ektra-tehtävät vataavat kolmea tehtävää, kun kurin lopua laketaan lakuharjoitupiteitä.
RATKAISUT: 17. Tasavirtapiirit
 Phyica 9. paino 1(6) ATKAST 17. Taavirtapiirit ATKAST: 17. Taavirtapiirit 17.1 a) Napajännite on laitteen navoita mitattu jännite. b) Lähdejännite on kuormittamattoman pariton napajännite. c) Jännitehäviö
Phyica 9. paino 1(6) ATKAST 17. Taavirtapiirit ATKAST: 17. Taavirtapiirit 17.1 a) Napajännite on laitteen navoita mitattu jännite. b) Lähdejännite on kuormittamattoman pariton napajännite. c) Jännitehäviö
S Fysiikka III (Est) Tentti
 Tentti") S-114137 Fyiikka III (Et) Tentti 9008 1 Vetyatomin elektronin kulmaliikemäärää kuvaa kvanttiluku l =3 Lake miä kaikia kulmia kulmaliikemäärävektori voi olla uhteea kulmaliikemäärän z-komponenttiin ( )
S-114137 Fyiikka III (Et) Tentti 9008 1 Vetyatomin elektronin kulmaliikemäärää kuvaa kvanttiluku l =3 Lake miä kaikia kulmia kulmaliikemäärävektori voi olla uhteea kulmaliikemäärän z-komponenttiin ( )
MAOL-Pisteitysohjeet Fysiikka kevät 2004
 MAOL-Piteityohjeet Fyiikka kevät 004 Tyypilliten virheiden aiheuttaia piteenetykiä (6 piteen kaalaa): - pieni lakuvirhe -1/3 p - lakuvirhe, epäielekä tulo, vähintään - - vataukea yki erkitevä nuero liikaa
MAOL-Piteityohjeet Fyiikka kevät 004 Tyypilliten virheiden aiheuttaia piteenetykiä (6 piteen kaalaa): - pieni lakuvirhe -1/3 p - lakuvirhe, epäielekä tulo, vähintään - - vataukea yki erkitevä nuero liikaa
Jakso 4: Dynamiikan perusteet jatkuu, työ ja energia Näiden tehtävien viimeinen palautus- tai näyttöpäivä on maanantaina
 Jako 4: Dynamiikan peruteet jatkuu, työ ja energia Näiden tehtävien viimeinen palautu- tai näyttöpäivä on maanantaina 8.8.2016. Kolmea enimmäieä lakua ovelletaan Newtonin 2. ja 3. lakia. T 4.1 (pakollinen):
Jako 4: Dynamiikan peruteet jatkuu, työ ja energia Näiden tehtävien viimeinen palautu- tai näyttöpäivä on maanantaina 8.8.2016. Kolmea enimmäieä lakua ovelletaan Newtonin 2. ja 3. lakia. T 4.1 (pakollinen):
S Piirianalyysi 2 2. välikoe
 S-55.22 Piirianalyyi 2 2. välikoe 6.5.23 Lake tehtävät 2 eri paperille kuin tehtävät 3 5. Muita kirjoittaa jokaieen paperiin elväti nimi, opikelijanumero, kurin nimi ja koodi. Epäelvät vataupaperit voidaan
S-55.22 Piirianalyyi 2 2. välikoe 6.5.23 Lake tehtävät 2 eri paperille kuin tehtävät 3 5. Muita kirjoittaa jokaieen paperiin elväti nimi, opikelijanumero, kurin nimi ja koodi. Epäelvät vataupaperit voidaan
Kertaustehtäviä. Luku 1. Physica 3 Opettajan OPAS
 (4) Luku 57. a) Mekaaniea poikittaiea aaltoliikkeeä aineen rakenneoat värähtelevät eteneiuuntaan vataan kohtiuoraa uunnaa. Eierkkejä ovat uun uaa jouen poikittainen aaltoliike tai veden pinnan aaltoilu.
(4) Luku 57. a) Mekaaniea poikittaiea aaltoliikkeeä aineen rakenneoat värähtelevät eteneiuuntaan vataan kohtiuoraa uunnaa. Eierkkejä ovat uun uaa jouen poikittainen aaltoliike tai veden pinnan aaltoilu.
Y Yhtälöparista ratkaistiin vuorotellen siirtofunktiot laittamalla muut tulot nollaan. = K K K M. s 2 3s 2 KK P
 Säädön kotitehtävä vk3 t. 1 a) { Y =G K P E H E=R K N N G M Y Yhtälöparista ratkaistiin vuorotellen siirtofunktiot laittamalla muut tulot nollaan. G R s = Y R = GK P s 1 = KK 1 GK P K N G P M s 2 3s 2
Säädön kotitehtävä vk3 t. 1 a) { Y =G K P E H E=R K N N G M Y Yhtälöparista ratkaistiin vuorotellen siirtofunktiot laittamalla muut tulot nollaan. G R s = Y R = GK P s 1 = KK 1 GK P K N G P M s 2 3s 2
Teknologiakehitystä ei voi pysäyttääj. Hankintaprosessi sähköistynyt laajalti. Oston teknologiakehityksen alkuvaiheita. Luento 11 e-hankinnat
 Tieto- ja palvelutalouden laito / logitiikka Teknologiakehitytä ei voi pyäyttääj Luento 11 e-hankinnat Tietotekniikka otamien apuvälineenä Erilaita teknologiaa Miten ähköitämieä tulii edetä Cae etapharm
Tieto- ja palvelutalouden laito / logitiikka Teknologiakehitytä ei voi pyäyttääj Luento 11 e-hankinnat Tietotekniikka otamien apuvälineenä Erilaita teknologiaa Miten ähköitämieä tulii edetä Cae etapharm
 Pikaohje Verio 1.0 marrakuu 2002 www.behringer.com SUOMI TURVALLISUUSOHJEET VAROITUS: Älä poita kantta (tai takaoaa) ähkäikuvaaran vähentämieki. Siällä ei ole käyttäjän huollettavia oia; käänny huolloa
Pikaohje Verio 1.0 marrakuu 2002 www.behringer.com SUOMI TURVALLISUUSOHJEET VAROITUS: Älä poita kantta (tai takaoaa) ähkäikuvaaran vähentämieki. Siällä ei ole käyttäjän huollettavia oia; käänny huolloa
OPINTOJAKSO FYSIIKKA 1 OV OPINTOKOKONAISUUTEEN FYSIIKKA JA KEMIA 2 OV. Isto Jokinen 2012. 1. Mekaniikka 2
 OPINTOJAKSO FYSIIKKA 1 OV OPINTOKOKONAISUUTEEN FYSIIKKA JA KEMIA OV Io Jokinen 01 SISÄLTÖ SIVU 1. Mekaniikka Nopeu Kekinopeu Kehänopeu 3 Kiihyvyy 3 Puoamikiihyvyy 4 Voima 5 Kika 6 Työ 7 Teho 8 Paine 9
OPINTOJAKSO FYSIIKKA 1 OV OPINTOKOKONAISUUTEEN FYSIIKKA JA KEMIA OV Io Jokinen 01 SISÄLTÖ SIVU 1. Mekaniikka Nopeu Kekinopeu Kehänopeu 3 Kiihyvyy 3 Puoamikiihyvyy 4 Voima 5 Kika 6 Työ 7 Teho 8 Paine 9
S FYSIIKKA IV (ES), Koulutuskeskus Dipoli, Kevät 2003, LH2. f i C C. λ 2, m 1 cos60,0 1, m 1,2 pm. λi λi
, Koulutuskeskus Dipoli, Kevät 2003, LH2. f i C C. λ 2, m 1 cos60,0 1, m 1,2 pm. λi λi") S-11436 FYSIIKKA IV (S), Kulutukeku Dipli, Kevät 003, LH LH-1 Ftni, jnka energia n 10,0 kev, törmää leva levaan vapaaeen elektrniin ja irttuu uuntaan, jka mudtaa 60,0 kulman ftnin alkuperäien liikeuunnan
S-11436 FYSIIKKA IV (S), Kulutukeku Dipli, Kevät 003, LH LH-1 Ftni, jnka energia n 10,0 kev, törmää leva levaan vapaaeen elektrniin ja irttuu uuntaan, jka mudtaa 60,0 kulman ftnin alkuperäien liikeuunnan
Luku 16 Markkinatasapaino
 68 Luku 16 Markkinataaaino 16.1 Markkinataaainon määrity Tarkatelemme kilailulliia markkinoita kaikki talouenitäjät hinnanottajia kaikki määrittävät arhaat ratkaiuna uhteea makimihintoihin talouenitäjien
68 Luku 16 Markkinataaaino 16.1 Markkinataaainon määrity Tarkatelemme kilailulliia markkinoita kaikki talouenitäjät hinnanottajia kaikki määrittävät arhaat ratkaiuna uhteea makimihintoihin talouenitäjien
DIGITAALISET PULSSIMODULAATIOT M JA PCM A Tietoliikennetekniikka I Osa 21 Kari Kärkkäinen Kevät 2015
 1 DIGITAALISET PULSSIMODULAATIOT M JA PCM 521357A Tietoliikennetekniikka I Oa 21 Kari Kärkkäinen DELTAMODULAATIO M 2 M koodaa näytteen ± polariteetin omaavaki binääripuliki. Idea perutuu ignaalin m(t muutoken
1 DIGITAALISET PULSSIMODULAATIOT M JA PCM 521357A Tietoliikennetekniikka I Oa 21 Kari Kärkkäinen DELTAMODULAATIO M 2 M koodaa näytteen ± polariteetin omaavaki binääripuliki. Idea perutuu ignaalin m(t muutoken
1 Määrittele lyhyesti seuraavat käsitteet. a) Kvantisointivirhe. b) Näytetaajuuden interpolointi. c) Adaptiivinen suodatus.
 Kvantisointivirhe. b) Näytetaajuuden interpolointi. c) Adaptiivinen suodatus.") TL536DSK-algoritmit (J. Laitinen) 6.4.5 Määrittele lyyeti euraavat käitteet a) Kvantiointivire. b) äytetaajuuden interpolointi. ) Adaptiivinen uodatu. a) Kvantiointivire yntyy, kun ignaalin ykittäinen
TL536DSK-algoritmit (J. Laitinen) 6.4.5 Määrittele lyyeti euraavat käitteet a) Kvantiointivire. b) äytetaajuuden interpolointi. ) Adaptiivinen uodatu. a) Kvantiointivire yntyy, kun ignaalin ykittäinen
S-55.1220 Piirianalyysi 2 Tentti 4.1.2007
 S-55.2 Piirianalyyi 2 Tentti 4..07. Piiriä yöttää kaki lähdettä, joilla on eri taajuudet. Kuinka uuri on lämmöki muuttuva teho P? Piiri on jatkuvuutilaa. J 2 00 Ω 5µH 0 pf 0/0 V J 2 00/0 ma f MHz f 2 2MHz.
S-55.2 Piirianalyyi 2 Tentti 4..07. Piiriä yöttää kaki lähdettä, joilla on eri taajuudet. Kuinka uuri on lämmöki muuttuva teho P? Piiri on jatkuvuutilaa. J 2 00 Ω 5µH 0 pf 0/0 V J 2 00/0 ma f MHz f 2 2MHz.
Fysiikkakilpailu 6.11.2007, avoimen sarjan vastaukset AVOIN SARJA
 Fyiikkakilpailu 6.11.007, avoimen ajan vatauket AVOIN SARJA Kijoita tektaten koepapeiin oma nimei, kotiooitteei, ähköpotiooitteei, opettajai nimi ekä koului nimi. Kilpailuaikaa on 100 minuuttia. Sekä tehtävä-
Fyiikkakilpailu 6.11.007, avoimen ajan vatauket AVOIN SARJA Kijoita tektaten koepapeiin oma nimei, kotiooitteei, ähköpotiooitteei, opettajai nimi ekä koului nimi. Kilpailuaikaa on 100 minuuttia. Sekä tehtävä-
S-55.1220 Piirianalyysi 2 Tentti 1.9.2011
 S-55.2 Piirianalyyi 2 Tentti.9.. e(t) L j(t) Lake vatukea lämmöki muuttuva teho P. = Ω L = mh = 2mF ω = 0 3 rad/ e = ê in(ωt) j = ĵ in(2ωt) ĵ = 0 A ê = 2 2 V. 2. u(t) k Kuvan mukainen taajännitelähteen
S-55.2 Piirianalyyi 2 Tentti.9.. e(t) L j(t) Lake vatukea lämmöki muuttuva teho P. = Ω L = mh = 2mF ω = 0 3 rad/ e = ê in(ωt) j = ĵ in(2ωt) ĵ = 0 A ê = 2 2 V. 2. u(t) k Kuvan mukainen taajännitelähteen
ESR. Maksatushakemuksen tiivistelmän liite
 2007-2013 ESR Makatuhakemuke tiivitelmä liite S12005 Arje arkki Suome ammatillie koulutuke kulttuuri ja urheiluliitto, SAKU ry Projektipäällikkö Ville Virtae PROJEKTI alkoi 1.1. päättyy 30.4.2014 1. PROJEKTIN
2007-2013 ESR Makatuhakemuke tiivitelmä liite S12005 Arje arkki Suome ammatillie koulutuke kulttuuri ja urheiluliitto, SAKU ry Projektipäällikkö Ville Virtae PROJEKTI alkoi 1.1. päättyy 30.4.2014 1. PROJEKTIN
 Lyhyt käyttöopa Verio 1.1 yykuu 2003 SUOMI TURVALLISUUSOHJEET YKSITYISKOHTAISET TURVALLISUUSOHJEET: 1) Lukekaa nämä ohjeet. 2) Säilyttäkää nämä ohjeet. 3) Huomioikaa kaikki varoituket. 4) Seuratkaa kaikkia
Lyhyt käyttöopa Verio 1.1 yykuu 2003 SUOMI TURVALLISUUSOHJEET YKSITYISKOHTAISET TURVALLISUUSOHJEET: 1) Lukekaa nämä ohjeet. 2) Säilyttäkää nämä ohjeet. 3) Huomioikaa kaikki varoituket. 4) Seuratkaa kaikkia
METSÄNTUTKIMUSLAITOS. tutkimusosasto. Metsäteknologian WÄRTSILA. Kenttäkoe. Tutkimusselostus
 METSÄNTUTKIMUSLAITOS Metäteknologian Uniinkatu WÄRTSILA 40 A tutkimuoato Helinki TELESKOOPPIKUORMAIN AUTOKUORMAUKSESSA Kenttäkoe Tutkimuelotu Juhani Helinki Lukkari 97 7 Ainto Tutkimuken kenttäkoe Ruokolahdella.
METSÄNTUTKIMUSLAITOS Metäteknologian Uniinkatu WÄRTSILA 40 A tutkimuoato Helinki TELESKOOPPIKUORMAIN AUTOKUORMAUKSESSA Kenttäkoe Tutkimuelotu Juhani Helinki Lukkari 97 7 Ainto Tutkimuken kenttäkoe Ruokolahdella.
Tilastotieteen jatkokurssi 8. laskuharjoitusten ratkaisuehdotukset (viikot 13 ja 14)
") Tilatotietee jatkokuri 8. lakuharjoitute ratkaiuehdotuket (viikot 13 ja 14) 1) Perujoukko o aluee A aukkaat ja tutkittavaa omiaiuutea ovat tulot, Tiedämme, että perujouko tulot oudattaa ormaalijakaumaa,
Tilatotietee jatkokuri 8. lakuharjoitute ratkaiuehdotuket (viikot 13 ja 14) 1) Perujoukko o aluee A aukkaat ja tutkittavaa omiaiuutea ovat tulot, Tiedämme, että perujouko tulot oudattaa ormaalijakaumaa,
Sosiaalihuollon kertomusmerkintä
 Soiaalihuollon kertomumerkintä Kommentoitava materiaali Terveyden ja hyvinvoinnin laito (THL) L 30 (Mannerheimintie 166) 0071 Helinki Telephone: 09 54 6000 www.thl.fi Siällyluettelo Soiaalihuollon kertomumerkintä...
Soiaalihuollon kertomumerkintä Kommentoitava materiaali Terveyden ja hyvinvoinnin laito (THL) L 30 (Mannerheimintie 166) 0071 Helinki Telephone: 09 54 6000 www.thl.fi Siällyluettelo Soiaalihuollon kertomumerkintä...
RATKAISUT: Kertaustehtäviä
 Phyica 1 uuditettu paino OPETTAJAN OPAS 1(9) Kertautehtäiä RATKAISUT: Kertautehtäiä LUKU 3. Luua on a) 4 eriteää nueroa b) 3 eriteää nueroa c) 7 eriteää nueroa. 4. Selitetään erieen yhtälön olepien puolien
Phyica 1 uuditettu paino OPETTAJAN OPAS 1(9) Kertautehtäiä RATKAISUT: Kertautehtäiä LUKU 3. Luua on a) 4 eriteää nueroa b) 3 eriteää nueroa c) 7 eriteää nueroa. 4. Selitetään erieen yhtälön olepien puolien
KUITUKAAPELOINTI KUITUKAAPELOINTI KAAPELIRAKENTEET KUITUKAAPELIVERKKO
 KUITUKAAPELOINTI Valokuitutekniikkaa on käytetty puhelinyhteykiä jo vuoia en mahdollitamien pitkien välimatkojen takia. Vähitellen en käyttö on yleitynyt myö kiinteitön yleikaapeloinnia. Kuidun liääntynyt
KUITUKAAPELOINTI Valokuitutekniikkaa on käytetty puhelinyhteykiä jo vuoia en mahdollitamien pitkien välimatkojen takia. Vähitellen en käyttö on yleitynyt myö kiinteitön yleikaapeloinnia. Kuidun liääntynyt
METSÄSTYSPUHELIMET. www.zodiacfinland.fi
 METSÄSTYSPUHELIMET www.zodiacfinland.fi Z O D I A C T E A M P R O WAT E R P R O O F ZODIAC Zodiac Team Pro Waterproof radiopuhelin on valintai, kun toiminnot ja uoritukyky ratkaievat. TAKUU 3 VUOTTA Open
METSÄSTYSPUHELIMET www.zodiacfinland.fi Z O D I A C T E A M P R O WAT E R P R O O F ZODIAC Zodiac Team Pro Waterproof radiopuhelin on valintai, kun toiminnot ja uoritukyky ratkaievat. TAKUU 3 VUOTTA Open
Metallikuulan vieriminen kaltevalla tasolla
 1 Metallikuulan vieriinen kaltevalla taolla Mikko Vetola Koulun nii Fyiikka luonnontieteenä FY1-Projektityö 4.6.2002 Arvoana: K+ (10) 2 1. Työn tarkoitu Tehtävänä oli tutkia illaiia liikeiliöitä eiintyy
1 Metallikuulan vieriinen kaltevalla taolla Mikko Vetola Koulun nii Fyiikka luonnontieteenä FY1-Projektityö 4.6.2002 Arvoana: K+ (10) 2 1. Työn tarkoitu Tehtävänä oli tutkia illaiia liikeiliöitä eiintyy
Viivakuormituksen potentiaalienergia saadaan summaamalla viivan pituuden yli
 hum.9. oiman potentiaalienergia Potentiaalienergiata puhutaan, kun kappaleeeen vaikuttaa jokin konervatiivinen voima. oima on konervatiivinen, jo en tekemä tö vaikutupieen iirteä tiettä paikata toieen
hum.9. oiman potentiaalienergia Potentiaalienergiata puhutaan, kun kappaleeeen vaikuttaa jokin konervatiivinen voima. oima on konervatiivinen, jo en tekemä tö vaikutupieen iirteä tiettä paikata toieen
Säätötekniikkaa. Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla
 ohjaus, joka saa systeemin toimimaan halutulla tavalla") Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Mat-2.091 Sovellettu todennäköisyyslasku. Tilastolliset testit. Avainsanat:
 Mat-.090 Sovellettu todeäköiyylaku A 0. harjoituket Mat-.09 Sovellettu todeäköiyylaku 0. harjoituket / Ratkaiut Aiheet: Avaiaat: Tilatolliet tetit Aritmeettie kekiarvo, Beroulli-jakauma, F-jakauma, F-teti,
Mat-.090 Sovellettu todeäköiyylaku A 0. harjoituket Mat-.09 Sovellettu todeäköiyylaku 0. harjoituket / Ratkaiut Aiheet: Avaiaat: Tilatolliet tetit Aritmeettie kekiarvo, Beroulli-jakauma, F-jakauma, F-teti,
1. Oheinen kuvio esittää kolmen pyöräilijän A, B ja C paikkaa ajan funktiona.
 Fotoni 4 Kertau - 1 Kertautehtäviä Luku 1 1. Oheinen kuvio eittää kolen pyöräilijän A, B ja C paikkaa ajan funktiona. a) Kuka on kulkenut piiän atkan aikavälinä 0...7? b) Milloin B aavuttaa C:n? c) Kenellä
Fotoni 4 Kertau - 1 Kertautehtäviä Luku 1 1. Oheinen kuvio eittää kolen pyöräilijän A, B ja C paikkaa ajan funktiona. a) Kuka on kulkenut piiän atkan aikavälinä 0...7? b) Milloin B aavuttaa C:n? c) Kenellä
PT-36 Plasmarc-leikkausarvot
 PT-36 Plamarc-leikkauarvot Leikkauarvojen opa (FI) 0558007661 Verion 8.1 releaed on 28Oct11 VARMISTA, ETTÄ KÄYTTÄJÄ SAA NÄMÄ TIEDOT. VOIT TILATA MYYJÄLTÄ LISÄÄ KOPIOITA. VARO OHJEET on tarkoitettu kokeneille
PT-36 Plamarc-leikkauarvot Leikkauarvojen opa (FI) 0558007661 Verion 8.1 releaed on 28Oct11 VARMISTA, ETTÄ KÄYTTÄJÄ SAA NÄMÄ TIEDOT. VOIT TILATA MYYJÄLTÄ LISÄÄ KOPIOITA. VARO OHJEET on tarkoitettu kokeneille
MAOL-Pisteitysohjeet Fysiikka kevät 2010
 MAOL-Piteityohjeet Fyiikka kevät 010 Tyypilliten virheiden aiheuttaia piteenetykiä (6 piteen kaalaa): - pieni lakuvirhe -1/3 p - lakuvirhe, epäielekä tulo, vähintään - - vataukea yki erkitevä nuero liikaa
MAOL-Piteityohjeet Fyiikka kevät 010 Tyypilliten virheiden aiheuttaia piteenetykiä (6 piteen kaalaa): - pieni lakuvirhe -1/3 p - lakuvirhe, epäielekä tulo, vähintään - - vataukea yki erkitevä nuero liikaa
SÄHKÖASEMAN ENSIÖPUOLEN SUUNNITTELUSSA KÄYTETTÄ- VIEN LASKENTAMENETELMIEN KEHITTÄMINEN
 aalto-yliopito tenillinen oreaoulu Eletroniian, tietoliienteen ja automaation tiedeunta Rauno Hirvonen SÄHKÖASEMAN ENSIÖPUOLEN SUUNNIELUSSA KÄYEÄ- VIEN LASKENAMENEELMIEN KEHIÄMINEN Diplomityö, joa on jätetty
aalto-yliopito tenillinen oreaoulu Eletroniian, tietoliienteen ja automaation tiedeunta Rauno Hirvonen SÄHKÖASEMAN ENSIÖPUOLEN SUUNNIELUSSA KÄYEÄ- VIEN LASKENAMENEELMIEN KEHIÄMINEN Diplomityö, joa on jätetty
1 LAMMIMUURIN RAKENNE JA OMINAISUUDET 2 2 KÄYTTÖKOHTEET 2 3 MUURITYYPIT 2 4 LASKENTAOTAKSUMAT 3 4.1 Materiaalien ominaisuudet 3 4.2 Maanpaine 3 4.
 1 LAIUURIN RAKENNE JA OINAISUUDET KÄYTTÖKOHTEET 3 UURITYYPIT 4 LASKENTAOTAKSUAT 3 4.1 ateriaalien ominaiuudet 3 4. aanpaine 3 4.3 uurin ketävyy npaineelle 4 4.4 Kaatumi- ja liukumivarmuu 5 4.4.1. Kaatumivarmuu
1 LAIUURIN RAKENNE JA OINAISUUDET KÄYTTÖKOHTEET 3 UURITYYPIT 4 LASKENTAOTAKSUAT 3 4.1 ateriaalien ominaiuudet 3 4. aanpaine 3 4.3 uurin ketävyy npaineelle 4 4.4 Kaatumi- ja liukumivarmuu 5 4.4.1. Kaatumivarmuu
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Teknillinen tiedekunta Älykkäät koneet ja järjestelmät, Systeemitekniikka
 Käyttöohje Verio maalikuu 25 TÄRKEITÄ TURVALLISUUSOHJEITA YKSITYISKOHTAISET TURVALLISUUSOHJEET: ) Lue nämä ohjeet HUOMIO: VAROITUS: Sähköikulta välttyäkenne ei päällykantta (tai tautaekti kantta) tule
Käyttöohje Verio maalikuu 25 TÄRKEITÄ TURVALLISUUSOHJEITA YKSITYISKOHTAISET TURVALLISUUSOHJEET: ) Lue nämä ohjeet HUOMIO: VAROITUS: Sähköikulta välttyäkenne ei päällykantta (tai tautaekti kantta) tule
3. kierros. 2. Lähipäivä
 3. kierros. Lähipäivä Viikon aihe (viikko /) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
3. kierros. Lähipäivä Viikon aihe (viikko /) Takaisinkytketyt vahvistimet Takaisinkytkentä, suljettu säätöluuppi Nyquistin kriteeri, stabiilisuus Taajuusanalyysi, Boden ja Nyquistin diagrammit Systeemin
Kuva 22: Fraktaalinen kukkakaali. pituus on siis 4 AB. On selvää, että käyrän pituus kasvaa n:n kasvaessa,
 Tortai 6..999 = Geometria o hyvä tapa kuvata ykikertaiia kappaleita, mutta kappaleie tullea äärettömä moimutkaiiki, käy iie kuvaamie klaie geometria avulla mahottomaki. Eimerkiki rataviiva pituue määrittämie
Tortai 6..999 = Geometria o hyvä tapa kuvata ykikertaiia kappaleita, mutta kappaleie tullea äärettömä moimutkaiiki, käy iie kuvaamie klaie geometria avulla mahottomaki. Eimerkiki rataviiva pituue määrittämie
UUSI, KOKO PERHEEN DOBLÒ. AINUTLAATUINEN KAIKILTA OSIN.
 FA MILY SPACE Tunnuomaiet, kolmiulotteiet, pitkälle keulan ivuja myötäilevät ajovalot näyttävät uunnan. Myö ivupeileiä on valot, jotka toimivat uuntavilkkuina. UUSI, KOKO PERHEEN DOBLÒ. AINUTLAATUINEN
FA MILY SPACE Tunnuomaiet, kolmiulotteiet, pitkälle keulan ivuja myötäilevät ajovalot näyttävät uunnan. Myö ivupeileiä on valot, jotka toimivat uuntavilkkuina. UUSI, KOKO PERHEEN DOBLÒ. AINUTLAATUINEN
LUKION FYSIIKKAKILPAILU 10.11.2009, ratkaisut PERUSSARJA
 LUKION FYSIIKKAKILPAILU 0..009, ratkaiut PERUSSARJA Vataa huolellieti ja iititi! Kirjoita tektaten koepaperiin oa niei, kotiooitteei, ähköpotiooite, opettajai nii ekä koului nii. Kilpailuaikaa on 00 inuuttia.
LUKION FYSIIKKAKILPAILU 0..009, ratkaiut PERUSSARJA Vataa huolellieti ja iititi! Kirjoita tektaten koepaperiin oa niei, kotiooitteei, ähköpotiooite, opettajai nii ekä koului nii. Kilpailuaikaa on 00 inuuttia.
LCL-suodattimella varustetun verkkosuuntaajan virtasäätö tilasäädintä ja havaitsijaa käyttäen
 LCL-uodattimella varutetun verkkouuntaajan virtaäätö tilaäädintä ja havaitijaa käyttäen Kimmo Haanpää Sähkötekniikan korkeakoulu Diplomityö, joka on jätetty opinnäytteenä tarkatettavaki diplomi-ininöörin
LCL-uodattimella varutetun verkkouuntaajan virtaäätö tilaäädintä ja havaitijaa käyttäen Kimmo Haanpää Sähkötekniikan korkeakoulu Diplomityö, joka on jätetty opinnäytteenä tarkatettavaki diplomi-ininöörin
Hyvyyskriteerit. ELEC-C1230 Säätötekniikka. Luku 8: Säädetyn järjestelmän hyvyys aika- ja taajuustasossa, suunnittelu taajuustasossa, kompensaattorit
 Hyvyyskriteerit ELEC-C1230 Säätötekniikka Aikaisemmilla luennoilla on havainnollistettu, miten systeemien käyttäytymiseen voi vaikuttaa säätämällä niitä. Epästabiileista systeemeistä saadaan stabiileja,
Hyvyyskriteerit ELEC-C1230 Säätötekniikka Aikaisemmilla luennoilla on havainnollistettu, miten systeemien käyttäytymiseen voi vaikuttaa säätämällä niitä. Epästabiileista systeemeistä saadaan stabiileja,
Tehtävä 1. Vaihtoehtotehtävät.
 Kem-9.47 Prosessiautomaation perusteet Tentti.4. Tehtävä. Vaihtoehtotehtävät. Oikea vastaus +,5p, väärä vastaus -,5p ja ei vastausta p Maksimi +5,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA
Kem-9.47 Prosessiautomaation perusteet Tentti.4. Tehtävä. Vaihtoehtotehtävät. Oikea vastaus +,5p, väärä vastaus -,5p ja ei vastausta p Maksimi +5,p ja minimi p TÄMÄ PAPERI TÄYTYY EHDOTTOMASTI PALAUTTAA
ELEC-C1230 Säätötekniikka. Luku 5: Navat ja nollat, systeemin nopeus, stabiilisuus ja värähtelyt, Routh-Hurwitz-kriteeri
 ELEC-C3 Säätötekniikka Luku 5: Navat ja nollat, yteemin nopeu, tabiiliuu ja värähtelyt, Routh-Hurwitz-kriteeri Syteemin käyttäytyminen Syteemin tai järjetelmän tärkein ominaiuu on tabiiliuu. Muita ominaiuukia
ELEC-C3 Säätötekniikka Luku 5: Navat ja nollat, yteemin nopeu, tabiiliuu ja värähtelyt, Routh-Hurwitz-kriteeri Syteemin käyttäytyminen Syteemin tai järjetelmän tärkein ominaiuu on tabiiliuu. Muita ominaiuukia
Suunniteltu toimivaksi... rakennettu kestämään
 - ja netekaaukäyttöiet vatapainotrukit Suunniteltu toimivaki... rakennettu ketämään 4 ja 5 tonnin polttomoottoritrukkien tehokkuu ja legendaarinen luotettavuu vaikeimmiakin olouhteia on jo vuoia ollut
- ja netekaaukäyttöiet vatapainotrukit Suunniteltu toimivaki... rakennettu ketämään 4 ja 5 tonnin polttomoottoritrukkien tehokkuu ja legendaarinen luotettavuu vaikeimmiakin olouhteia on jo vuoia ollut
Agenda. Johdanto Säätäjiä. Mittaaminen. P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen
 8. Luento: Laitteiston ohjaaminen Arto Salminen, [email protected] Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen Johdanto Tavoitteena: tunnistaa
8. Luento: Laitteiston ohjaaminen Arto Salminen, [email protected] Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen Johdanto Tavoitteena: tunnistaa
JOHNSON CONTROLS. Maalämpösäädin KÄYTTÖOHJE
 JOHNSON CONTROLS Maalämpösäädin KÄYTTÖOHJE Ohjekirjassa perehdytään tarkemmin maalämpökoneen toimintaan ja asetuksiin. Noudattamalla ohjekirjan ohjeita saatte parhaimman hyödyn laitteestanne, sekä varmistatte
JOHNSON CONTROLS Maalämpösäädin KÄYTTÖOHJE Ohjekirjassa perehdytään tarkemmin maalämpökoneen toimintaan ja asetuksiin. Noudattamalla ohjekirjan ohjeita saatte parhaimman hyödyn laitteestanne, sekä varmistatte
NAANTALI KARJALUOTO - PIRTTILUOTO ASEMAKAAVALUONNOS 3.10.06
 NAANTALI KARJALUOTO - PIRTTILUOTO ASEMAKAAVALUONNOS 3.0.06 Siniellä värillä on eitetty rakennuala/rakennualan oa, joka ijaitee kahden metrin korkeukäyrän alapuolella. Silta Epoon Suviaaritoa. Yleitä Aemakaavaonnoken
NAANTALI KARJALUOTO - PIRTTILUOTO ASEMAKAAVALUONNOS 3.0.06 Siniellä värillä on eitetty rakennuala/rakennualan oa, joka ijaitee kahden metrin korkeukäyrän alapuolella. Silta Epoon Suviaaritoa. Yleitä Aemakaavaonnoken
Luottamusmiehen / -valtuutetun valinta, asema ja oikeudet
 YLEMMÄT TOIMIHENKILÖT YTN RY OHJE YRY+K -ryhmä / Mko 19.8.2009 1 (13) Luottamumiehen / -valtuutetun valinta, aema ja oikeudet Siällyluettelo: Yleitä... 2 Oikeu luottamumiehen valintaan... 2 Luottamumiehen
YLEMMÄT TOIMIHENKILÖT YTN RY OHJE YRY+K -ryhmä / Mko 19.8.2009 1 (13) Luottamumiehen / -valtuutetun valinta, aema ja oikeudet Siällyluettelo: Yleitä... 2 Oikeu luottamumiehen valintaan... 2 Luottamumiehen
ELEC-C1230 Säätötekniikka. Luku 10: Digitaalinen säätö, perusteet, jatkuu
 ELEC-C230 Säätötekniikka Luku 0: Digitaalinen äätö, peruteet, jatkuu Johdanto: Digitaalinen (dikreetti, dikreettiaikainen) äätöjärjetelmä r(t k ) + _ e(t k ) Säädin u(t k ) D/A u(t) Proei y(t) A/D y(t
ELEC-C230 Säätötekniikka Luku 0: Digitaalinen äätö, peruteet, jatkuu Johdanto: Digitaalinen (dikreetti, dikreettiaikainen) äätöjärjetelmä r(t k ) + _ e(t k ) Säädin u(t k ) D/A u(t) Proei y(t) A/D y(t
BINÄÄRINEN SYNKRONINEN TIEDONSIIRTO KAISTARAJOITTAMATTOMILLA MIELIVALTAISILLA PULSSIMUODOILLA SOVITETTU SUODATIN JA SEN SUORITUSKYKY AWGN-KANAVASSA
 BINÄÄRINN SYNKRONINN IDONSIIRO KAISARAJOIAMAOMILLA MILIVALAISILLA PULSSIMUODOILLA SOVIU SUODAIN JA SN SUORIUSKYKY AWGN-KANAVASSA Millaiia aalomuooja perupuleja yypilliei käyeään? 536A ieoliikenneekniikka
BINÄÄRINN SYNKRONINN IDONSIIRO KAISARAJOIAMAOMILLA MILIVALAISILLA PULSSIMUODOILLA SOVIU SUODAIN JA SN SUORIUSKYKY AWGN-KANAVASSA Millaiia aalomuooja perupuleja yypilliei käyeään? 536A ieoliikenneekniikka
10 Suoran vektorimuotoinen yhtälö
 10 Suran vektrimutinen htälö J aluki tarkatellaan -tan kuuluvaa, rign kautta kulkevaa uraa, niin ura n täin määrätt, mikäli tunnetaan en uunta. Tavallieti tämä annetaan uuntakulman tangentin = kulmakertimen
10 Suran vektrimutinen htälö J aluki tarkatellaan -tan kuuluvaa, rign kautta kulkevaa uraa, niin ura n täin määrätt, mikäli tunnetaan en uunta. Tavallieti tämä annetaan uuntakulman tangentin = kulmakertimen
 Lyhyt käyttöopa Verio 1.3 heinäkuu 2004 VAMPIRE VAMP PRO VAMP 2 SUOMI TÄRKEITÄ TURVALLISUUSOHJEITA YKSITYISKOHTAISET TURVALLISUUSOHJEET: 1) Lue nämä ohjeet. 2) Säilytä nämä ohjeet. 3) Huomioi kaikki varoituket.
Lyhyt käyttöopa Verio 1.3 heinäkuu 2004 VAMPIRE VAMP PRO VAMP 2 SUOMI TÄRKEITÄ TURVALLISUUSOHJEITA YKSITYISKOHTAISET TURVALLISUUSOHJEET: 1) Lue nämä ohjeet. 2) Säilytä nämä ohjeet. 3) Huomioi kaikki varoituket.
N p Katseluavaruudessa tehtävät operaatiot. Karsinta eli takasivueliminointi. Katselutilavuus
 5.2. Kateluaaruuea tehtäät operaatiot Karinta eli takaiueliminointi Karinta eli takaiueliminointi on toimenpie, joka ertaa monikulmioien uuntaa katelupiteen eli projektion kekipiteen kana. Jo näkmä käittää
5.2. Kateluaaruuea tehtäät operaatiot Karinta eli takaiueliminointi Karinta eli takaiueliminointi on toimenpie, joka ertaa monikulmioien uuntaa katelupiteen eli projektion kekipiteen kana. Jo näkmä käittää
RATKAISUT: 5. Liikemäärä ja impulssi
 Phyica 9 1. paino 1(9) 5. Liikeäärä ja ipuli : 5. Liikeäärä ja ipuli 5.1 a) Kappaleen liikeäärä on p, joa on kappaleen aa ja kappaleen nopeu. b) Ipuliperiaate: Syteein liikeäärän uuto Δ p aikaälillä Δt
Phyica 9 1. paino 1(9) 5. Liikeäärä ja ipuli : 5. Liikeäärä ja ipuli 5.1 a) Kappaleen liikeäärä on p, joa on kappaleen aa ja kappaleen nopeu. b) Ipuliperiaate: Syteein liikeäärän uuto Δ p aikaälillä Δt
SAVUN JA KOSTEUDEN VAIKUTUS ELEKTRONIIKKAPIIREIHIN
 SAVUN JA KOSTEUDEN VAIKUTUS ELEKTRONIIKKAPIIREIHIN TIIVISTELMÄ Johan Mang & Olavi Keki-Rahkonen VTT Rakenn- ja yhdykntatekniikka PL 803, 02044 VTT Savn, koteden ekä näiden yhteitä äkillitä vaiktta elektroniikkapiireihin
SAVUN JA KOSTEUDEN VAIKUTUS ELEKTRONIIKKAPIIREIHIN TIIVISTELMÄ Johan Mang & Olavi Keki-Rahkonen VTT Rakenn- ja yhdykntatekniikka PL 803, 02044 VTT Savn, koteden ekä näiden yhteitä äkillitä vaiktta elektroniikkapiireihin
Nokian kaupungin tiedotuslehti Kolmenkulman yrityksille
 Nokian kaupungin tiedotulehti Kolmenkulman yritykille Hyvä nykyinen ja tuleva kolmenkulmalainen U ui yrityalueemme alkoi yntyä Öljytien varteen ijaitee Nokian puolella. Tampereella iitä on yli 200 heh-
Nokian kaupungin tiedotulehti Kolmenkulman yritykille Hyvä nykyinen ja tuleva kolmenkulmalainen U ui yrityalueemme alkoi yntyä Öljytien varteen ijaitee Nokian puolella. Tampereella iitä on yli 200 heh-
Mat-2.090 Sovellettu todennäköisyyslasku A
 Mat-.090 Sovellettu todeäköiyylaku A Mat-.090 Sovellettu todeäköiyylaku A / Ratkaiut Aiheet: Avaiaat: Tilatollite aieito keräämie ja mittaamie Tilatollite aieitoje kuvaamie Oto ja otojakaumat Aritmeettie
Mat-.090 Sovellettu todeäköiyylaku A Mat-.090 Sovellettu todeäköiyylaku A / Ratkaiut Aiheet: Avaiaat: Tilatollite aieito keräämie ja mittaamie Tilatollite aieitoje kuvaamie Oto ja otojakaumat Aritmeettie

Huvilasuosikit. www.kontio.fi HS2010 .AT 37. Osoitelähde: Kontiotuote Oy:n asiakasrekisteri
 .AT 37 HS2010 Huvilauoikit Valite nyt runa ja helppo Jättitoimitu! Suoituimmat mallit tarjouhinnoin! www.kontio.fi Ooitelähde: Kontiotuote Oy:n aiakarekiteri Tututu Suomen hirimarkkinoiden jtavan toimittajan
.AT 37 HS2010 Huvilauoikit Valite nyt runa ja helppo Jättitoimitu! Suoituimmat mallit tarjouhinnoin! www.kontio.fi Ooitelähde: Kontiotuote Oy:n aiakarekiteri Tututu Suomen hirimarkkinoiden jtavan toimittajan
1 Magneetin ympärillä on magneettikenttä Perustehtävät
 Phyica 7 Opettajan OPAS (6) Magneetin ympärillä on magneettikenttä Magneetin ympärillä on magneettikenttä Perutehtävät. a) Aineet voidaan luokitella magneettiiin ja ei-magneettiiin aineiiin. Oa ei-magneettiita
Phyica 7 Opettajan OPAS (6) Magneetin ympärillä on magneettikenttä Magneetin ympärillä on magneettikenttä Perutehtävät. a) Aineet voidaan luokitella magneettiiin ja ei-magneettiiin aineiiin. Oa ei-magneettiita
Säätötekniikkaa. Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla
 ohjaus, joka saa systeemin toimimaan halutulla tavalla") Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
Säätötekniikkaa Säätöongelma: Hae (mahdollisesti ulostulon avulla) ohjaus, joka saa systeemin toimimaan halutulla tavalla servo-ongelma: ulostulon seurattava referenssisignaalia mahdollisimman tarkasti,
YDINSPEKTROMETRIA TENTTI mallivastaukset ja arvostelu max 30 p, pisterajat 15p 1, 18p 2, 21p 3, 24p 4, 27p - 5
 5573-5 YDISPEKTROMETRIA TETTI 9.5.05 mallivatauket ja arvotelu max 30 p, piterajat 5p, 8p, p 3, 4p 4, 7p - 5. Mittautehokkuu ja iihen vaikuttavat aiat/ilmiöt gammapektrometriaa (yht. 6 p) Vatau: ilmaiimea
5573-5 YDISPEKTROMETRIA TETTI 9.5.05 mallivatauket ja arvotelu max 30 p, piterajat 5p, 8p, p 3, 4p 4, 7p - 5. Mittautehokkuu ja iihen vaikuttavat aiat/ilmiöt gammapektrometriaa (yht. 6 p) Vatau: ilmaiimea
Suomen Rahapaja -konsernin vuosikertomus
 Suomen Rahapaja -konernin vuoikertomu Siälly 1 Johdanto 2 Suomen Rahapaja - konerni lyhyeti 3 Konernin tunnulukuja 4 Uui toimintatapamme: One Mint of Finland 6 Kate eteenpäin 8 Valoa taantuman päää 12
Suomen Rahapaja -konernin vuoikertomu Siälly 1 Johdanto 2 Suomen Rahapaja - konerni lyhyeti 3 Konernin tunnulukuja 4 Uui toimintatapamme: One Mint of Finland 6 Kate eteenpäin 8 Valoa taantuman päää 12
RATKAISUT: 7. Gravitaatiovoima ja heittoliike
 Phyica 9. paino () 7. Gaitaatiooia ja heittoliike : 7. Gaitaatiooia ja heittoliike 7. a) Gaitaatiooia aikuttaa kaikkien kappaleiden älillä. Gaitaatiooian uuuu iippuu kappaleiden aoita ja niiden älietä
Phyica 9. paino () 7. Gaitaatiooia ja heittoliike : 7. Gaitaatiooia ja heittoliike 7. a) Gaitaatiooia aikuttaa kaikkien kappaleiden älillä. Gaitaatiooian uuuu iippuu kappaleiden aoita ja niiden älietä