MIKROTYÖSTÖLINJAN 3D-MALLINNUS 3D-MODELING OF MICRO MACHINING LINE
|
|
|
- Taisto Tuominen
- 7 vuotta sitten
- Katselukertoja:
Transkriptio
1 LAPPEENRANNAN TEKNILLINEN YLIOPISTO LUT School of Energy Systems LUT Kone BK10A0402 Kandidaatintyö MIKROTYÖSTÖLINJAN 3D-MALLINNUS 3D-MODELING OF MICRO MACHINING LINE Lappeenrannassa Niko Ahonen Tarkastaja TkT Mika Lohtander Ohjaaja TkT Mika Lohtander
2 TIIVISTELMÄ Lappeenrannan teknillinen yliopisto LUT Energiajärjestelmät LUT Kone Niko Ahonen Mikrotyöstölinjan 3D-mallinnus Kandidaatintyö sivua, 16 kuvaa, 2 taulukkoa, 4 liitettä Tarkastaja: Ohjaaja: TkT Mika Lohtander TkT Mika Lohtander Hakusanat: 3D-mallinnus, SolidWorks Tämä kandidaatintyö käsittelee mikrotyöstölinjan 3D-mallinnusta. Työn tavoitteena on mallintaa mikrotyöstölinjasta kokoonpano, joka vastaa ominaisuuksiltaan todellista fyysistä konetta. Tutkimus jakautuu teoriaosuuteen ja käytännön osuuteen. Teoriaosuudessa käsitellään 3Dmallinnuksen perusteita, kokoonpanojen mallintamista ja SolidWorks 3Dsuunnitteluohjelmiston käyttöä. Käytännön osuudessa mikrotyöstölinjasta mallinnetaan SolidWorks 3D-suunnitteluohjelmistolla kokoonpano hyödyntäen mallinnusta varten saatua aineistoa ja teoriaosuuden tietoja. Työn tuloksissa verrataan käytännön osuudessa mallinnetun mikrotyöstölinjan kokoonpanon ominaisuuksia todellisen fyysisen koneen ominaisuuksiin. Kandidaatintyön tulosten perusteella keskeisimpänä johtopäätöksenä voidaan pitää tarkkojen umpinaisten mallien käytön tärkeyttä kokoonpanojen 3D-mallinnuksessa. Tutkimuksen tulosten perusteella ainoastaan tarkkoja umpinaisia malleja sisältävä kokoonpano voi vastata kaikilta ominaisuuksiltaan todellista fyysistä laitetta.
3 ABSTRACT Lappeenranta University of Technology LUT School of Energy Systems LUT Mechanical Engineering Niko Ahonen 3D-modeling of micro machining line Bachelor s Thesis 36 pages, 16 figures, 2 tables, 4 appendices Examiner: Supervisor: D.Sc. (Tech.) Mika Lohtander D.Sc. (Tech.) Mika Lohtander Keywords: 3D-modeling, SolidWorks This bachelor s thesis deals with 3D-modeling of the micro machining line. The goal of this bachelor s thesis is to form a 3D-assembly of the micro machining line, which properties are equal to the actual machine. The thesis is divided into two parts: theoretical part and practical part. Theoretical part handles with basics of 3D-modeling, assembly forming and usage of the SolidWorks 3D design software. The aim of the practical part is to model a 3D-assembly of the micro machining line with SolidWorks 3D design software utilizing thesis material about micro machining line and the information gathered in the theoretical part. Research results focus in comparing modeled 3D-assembly s properties with the properties of the actual machine. The main conclusion of this bachelor s thesis is that usage of accurate solid models is necessary in 3D-assembly modeling. Based on research results, 3Dassembly s properties can be equal to the real machine only if the assembly is made from accurate solid models.
4 4 SISÄLLYSLUETTELO TIIVISTELMÄ ABSTRACT SISÄLLYSLUETTELO LYHENNELUETTELO 1 JOHDANTO Työn tausta Tutkimusongelma ja -tavoite Tutkimuskysymykset ja tutkimuksen rajaukset Tutkimusmetodit TEORIA D-mallityypit Parametrinen piirremallinnus D-mallinnusmenetelmät SolidWorks 3D-suunnitteluohjelmisto Osien käsittely SolidWorksissä Kokoonpanot Alhaalta ylös-menetelmä Ylhäältä alas-menetelmä Sidokset MIKROTYÖSTÖLINJAN MALLINNUS Osien käsittely Osakokoonpanot Pääkokoonpano TULOKSET POHDINTA JA JOHTOPÄÄTÖKSET YHTEENVETO LÄHTEET LIITTEET LIITE I: Mikrotyöstölinjan toimilaitteet
5 5 LIITE II: Mikrotyöstölinjan osaluettelo LIITE III: Mikrotyöstölinjan osakokoonpanot LIITE IV: Mikrotyöstölinjan toimilaitteiden liikeradat
6 6 LYHENNELUETTELO CAD Computer Aided Design Tietokoneavusteinen suunnittelu CAE Computer Aided Engineering Tietokoneavusteinen laskenta
7 7 1 JOHDANTO Tämä kandidaatintyö käsittelee mikrotyöstölinjan 3D-mallinnusta. 3D-mallinnuksella tarkoitetaan kolmiulotteisten kappaleiden ja tuotteiden CAD- (Computer Aided Design) eli tietokoneavusteista suunnittelua. 3D-mallinnuksessa osille ja kokoonpanoille määritetään todellisuutta vastaava ulkonäkö, sekä fysikaaliset ja mekaaniset ominaisuudet. (Tuhola & Viitanen 2008, s. 17.) 1.1 Työn tausta Kandidaatintyön aihe on saatu Lappeenrannan teknillisen yliopiston tuotantotekniikanlaboratoriolta. Työ tehdään mikrotyöstölinjan digitaalisen kaksosen luomiseksi. Tässä työssä tehty 3D-malli on ensimmäinen askel kohti digitaalista kaksosta, joka on mahdollisimman tarkka kuvaus fyysisestä koneesta. Työn pohjana toimii mikrotyöstölinjasta saatu aineisto, joka sisältää mallinnusta varten tarvittavat tiedot. Mikrotyöstölinja koostuu kolmesta päämoduulista, joita ovat latausasema, manipulaattori ja työstöasema. Tässä kandidaatintyössä mallinnettava mikrotyöstölinja sisältää kaksi työstöasemaa, yhden latausaseman ja yhden manipulaattorin. Linjaa on kuitenkin mahdollista laajentaa kymmeneen työstöasemaan ja kahteen latausasemaan. Latausaseman manuaalisesti ulosvedettävän lataustason kautta tuodaan työstettävät kappaleet mikrotyöstölinjalle. Latausasema sisältää myös huoltoluukun. Manipulaattori sisältyy ensimmäiseen latausasemaan ja siirtää työstettävät kappaleet sisältävän paletin latausasemalta kuljetuskiskoa pitkin työstöasemalle, sekä palauttaa työstämisen jälkeen paletin takaisin latausasemalle. Manipulaattorissa on x-, y- ja z-akselit. Työstöasema sisältää laserin oheislaitteineen, optiikan ja skannerin. Laserin skanneri on liikuteltavissa korkeussäädettävän alusta avulla. Työstettävät kappaleet sisältävä paletti tuodaan työstöaseman sisälle moottoroidun suojaluukun kautta. Työstöasema sisältää myös sivulle avautuvan oven. 1.2 Tutkimusongelma ja -tavoite Kandidaatintyön tavoitteena on mallintaa mikrotyöstölinjasta kokoonpano, jota pystytään käyttämään tulevaisuudessa todellisen mikrotyöstölinjan etäkäytössä simuloinnin avulla.
8 8 Työn tutkimusongelma on, miten mallinnettavan mikrotyöstölinjan kokoonpano saadaan vastaamaan ominaisuuksiltaan todellista fyysistä konetta. Ominaisuuksilla tarkoitetaan tässä tapauksessa mikrotyöstölinjan kokoonpanon osien geometriaa, koostumusta ja materiaaliominaisuuksia, sekä toimilaitteiden liikealueita ja -ratoja. 1.3 Tutkimuskysymykset ja tutkimuksen rajaukset Tutkimusongelman ratkaisemiseksi voidaan esittää seuraava tutkimuskysymys: Miten 3D-suunnitteluohjelmistossa mallinnetaan ominaisuuksiltaan todellista mikrotyöstölinjaa vastaava kokoonpano? Tämä kandidaatintyö käsittelee vain mikrotyöstölinjan mallinnusta, joten 3D-mallin jatkokäyttö tulevaisuudessa on rajattu työstä pois. Saatu aineisto sisältää mikrotyöstölinjassa käytettävien osien 3D-mallit, joten kandidaatintyössä keskitytään jo mallinnettujen osien käsittelemiseen ja kokoonpanojen mallinnukseen. Tässä työssä itse mallinnettavia monimutkaisia osia ei siten mallinneta tarkasti. 1.4 Tutkimusmetodit Tämä tutkimus koostuu teoriaosuudesta ja käytännön osuudesta. Teoriaosuudessa käsitellään 3D-mallinnuksen perusteita, kokoonpanojen muodostamista ja SolidWorks 3Dsuunnitteluohjelmiston käyttöä. Teoriaosuudessa tiedonhakuun on käytetty Lappeenrannan teknillisen yliopiston LUT Finna-tietokantaa, kansainvälisiä e-kirjatietokantoja, kuten Sciencedirectiä ja Springer ebooksia. Lisäksi teoriaosuudessa on käytetty tiedonhakuun SolidWorksin www-sivuja. Käytännön osuudessa mallinnetaan SolidWorks 3Dsuunnitteluohjelmistolla mikrotyöstölinjan kokoonpano hyödyntäen saatua aineistoa ja teoriaosuuden tietoja.
9 9 2 TEORIA Teoriaosuudessa käsitellään 3D-mallinnuksen perusteita, SolidWorks 3Dsuunnitteluohjelmiston käyttöä ja kokoonpanojen muodostamista. Teoriaosuudessa käsitellään kirjallisuudesta löydettyjä tietoja tutkimusongelman ratkaisemiseksi D-mallityypit 3D-mallien avulla esitetään kolmiulotteisia tuotteita mallinnusohjelman kolmiulotteisessa tilassa. 3D-mallin tulee vastata todellista tuotetta ulkonäöltään ja ominaisuuksiltaan. 3Dmallit jakautuvat neljään päätyyppiin: rautalanka-, pinta-, tilavuus- ja umpinaisiin malleihin. (Tuhola & Viitanen 2008, s. 20.) Kuvassa 1. havainnollistetaan näitä 3D-mallityyppejä: vasemmalla on rautalankamalli, keskellä pintamalli ja oikealla tilavuus -/umpinainen malli (Sunnersjö 2016, s ). Kuva 1. 3D-malliryhmät: vasemmalla rautalankamalli, keskellä pintamalli ja oikealla tilavuus -/umpinainen malli (Sunnersjö 2016, s. 30). Rautalankamalleissa (engl. Wireframe model) käytetään vain pisteitä, suoria viivoja ja käyriä kolmiulotteisten objektien määrittämiseen. Rautalankamalli on yksinkertaisin tapa kuvailla objekteja kolmiulotteisessa tilassa. Rautalankaelementeille voidaan määrittää sijainti ja mitat, mutta rautalankamallista puuttuu silti paljon ominaisuuksia määrittääkseen objektin täydellisesti. Rautalankamalli ei sisällä tietoja objektin koostumuksesta tai ulkomuodoista, lisäksi rautalankamallit ovat usein sekavia ja vaikeasti tulkittavia. Rautalankamallit muodostavat kuitenkin perustan pinta- ja tilavuusominaisuuksien
10 10 muodostamiselle. (Tuhola & Viitanen 2008, s ; Sunnersjö 2016, s. 30; Duhovnik, Demšar & Drešar 2015, s ) Pintamallien (engl. Surface models) avulla voidaan määritellä tason suuntaisia ja kaarevia pintoja kolmiulotteisessa tilassa. Pintamallit ovat kehittyneempiä versioita rautalankamalleista ja ne sisältävät tiedot pinnan geometriasta. Pintamalleistakin kuitenkin puuttuu rautalankamallien kaltaisesti informaatio objektin koostumuksesta. (Hirz et al. 2013, s. 244.) Tilavuusmalli (engl. Volume model) näyttää ulkopuolisesti todellista objektia vastaavalta ja samalta kuin umpinainen malli. Kuitenkin myös tilavuusmallissa tiedot objektin koostumuksesta ovat puutteellisia. (Sunnersjö 2016, s. 30.) Umpinaisen mallin (engl. Solid model) avulla voidaan esittää kappaleen täydellinen ja todellinen geometria virtuaaliympäristössä. Umpinaiset mallit sisältävät kaikki tiedot kappaleen koostumuksesta, kuten esimerkiksi kappaleen ulko- ja sisämuodoista, elementtien kiinnityksistä ja materiaalista. Umpinaisia malleja voidaan hyödyntää tehokkaasti myös muissa suunnittelun vaiheissa, kuten analyyseissä, simuloinneissa ja dokumentoinnissa. Umpinainen malli on käytetyin mallityyppi 3D-mallinnuksessa. (Tuhola & Viitanen 2008, s. 22; Hirz et al. 2013, s. 245.) 2.2 Parametrinen piirremallinnus Parametrisessä 3D-mallinnuksessa geometrisia objekteja ja kappaleita yhdistellään rajoitteiden (engl. Constraints) ja mittadatan avulla (engl. Dimensional data). Näitä määritettyjä parametreja voidaan muuttaa kaikissa mallinnuksen vaiheissa, jolloin samalla mallinnettavan kappaleen geometria muuttuu parametrien mukaisesti. Parametrinen 3Dmallinnus mahdollistaa geometrian luomisen ilman tarkkoja mittoja, joita suunnittelun alkuvaiheessa ei usein tarkasti tiedetä. Kuvassa 2. havainnollistetaan sylinterin muotoisen kappaleen parametristä mallinnusta. Ensiksi sylinterin Z geometria määritellään parametrien pituus Lz ja säde Rz avulla. Sylinterin sijainti ja orientaatio koordinaatistossa määritetään pisteen P1 ja suoran g suunnan avulla. Mallinnetun kappaleen kokoa, sijaintia ja suuntaa voidaan jälkikäteen säädellä helposti muuttamalla vain määritettyjä parametreja. (Hirz et al. 2013, s ; Hietikko 2012, s. 23.)


11 11 Kuva 2. Sylinterin muotoisen kappaleen parametrinen mallinnus (Hirz et al. 2013, s. 248). Piirremallinnus tarkoittaa, että kappaleen 3D-malli muodostetaan erilaisten piirteiden avulla. Ensimmäiseksi tehdään peruspiirre, johon lisätään uusia piirteitä, kunnes malli on halutulla tarkkuudella. (Hietikko 2012, s ) Käytetyimpiä piirteitä kappaleiden mallinnuksessa ovat leikkaus- ja pursotuspiirteet, joiden avulla kappaleeseen lisätään tai kappaleesta poistetaan muotoja (Tuhola & Viitanen 2008, s. 26). Kuvassa 3. havainnollistetaan kappaleen muodostumista parametrisen piirremallinnuksen avulla. Ensiksi on luotu peruspiirre, tämän jälkeen peruspiirteeseen on lisätty pursotuspiirteen avulla neliö ja lopuksi peruspiirteeseen on tehty reiät leikkauspiirteen avulla. Mallinnuksessa käytetään myös piirteitä, jotka eivät vaikuta kappaleen geometriaan. Kyseisistä piirteistä tärkeimpiä ovat materiaaliominaisuudet ja kappaleen väri. (Tuhola & Viitanen 2008, s. 46.) Kuva 3. Pursotus- ja leikkauspiirteiden käyttö piirremallinnuksessa. Suunnitteluohjelmistoissa 3D-mallin piirteet näkyvät itse mallinnettavan kappaleen lisäksi myös piirrepuussa (engl. Design Tree). Kokoonpanoja tehtäessä piirrepuussa taas näkyy

12 12 kaikki käytetyt osat, osakokoonpanot ja sidokset. (Hietikko 2012, s ) Kokoonpanoja käsitellään tarkemmin luvussa 2.6. Kuvassa 4. nähdään SolidWorks 3Dsuunnitteluohjelmiston piirrepuu, jossa olevat piirteet kuuluvat aiemman esimerkin kappaleelle. Kuva 4. SolidWorks 3D-suunnitteluohjelmiston piirrepuu. Lähes kaikki nykyaikaiset mallinnusohjelmistot perustuvat parametriseen piirremallinnukseen, kuten muun muassa tässä kandidaatintyössä käytettävä SolidWorks. Parametrisen piirremallinnuksen suosio perustuu 3D-mallien helppoon muokattavuuteen tuotesuunnitteluprosessin aikana. (Hietikko 2012, s. 25.) 2.3 3D-mallinnusmenetelmät 3D-mallinnus voidaan jaotella eri menetelmiin, joiden päätyypit ovat kappalemallinnus, levymallinnus ja pintamallinnus. (Tuhola & Viitanen 2008, s. 26). Kappalemallinnuksessa eli solidimallinnuksessa luodaan ja muokataan umpinaisia kappaleita käyttämällä valmiita muotoja, kuten esimerkiksi neliöitä tai ympyröitä. Yleisimmät muokkaustavat kappalemallinnuksessa ovat jo aiemmin mainitut leikkaus ja pursotus. Kappalemallinnettuja kappaleita voidaan todellisuudessa tuottaa esimerkiksi lastuavilla työstömenetelmillä, joita ovat sorvaus, poraus ja jyrsintä. (Tuhola & Viitanen 2008, s. 26.) Levymallinnuksessa käytetään erilaisia levyjä kappaleiden luomiseen. 3D-mallia muokataan mallinnusohjelmassa todellisia levytyöstömenetelmiä käyttäen, näitä työstömenetelmiä ovat
13 13 kanttaus, särmäys, puristus- ja vetotyökalut, sekä pyöristyskoneet. Levyosille voidaan käyttää myös joitain kappalemallinnuksessa käytettäviä komentoja, kuten esimerkiksi leikkauskomentoja voidaan hyödyntää reikien tekemiseen. (Tuhola & Viitanen 2008, s ) Pintamallinnus poikkeaa mallinnus- ja käyttötavaltaan paljon kappale- ja levymallinnuksesta. Pääasiassa pintamallinnus on muotoilijoiden käyttämä työkalu ja sitä käytetään tyypillisesti valamalla, pursottamalla ja muoteilla valmistettujen tuotteiden mallinnukseen. (Tuhola & Viitanen 2008, s ) 2.4 SolidWorks 3D-suunnitteluohjelmisto SolidWorks on Dassault Systèmes-ohjelmistoyrityksen kehittämä Windowskäyttöjärjestelmillä toimiva 3D CAD/CAE-suunnitteluohjelmisto (Computer Aided Engineering eli tietokoneavusteinen laskenta). Yritys on perustettu vuonna 1993 nimellä SolidWorks Corporation, kuitenkin vuonna 1997 Dassault Systèmes osti yrityksen ja siitä asti yritys on edennyt nykyisellä nimellään. Ensimmäinen SolidWorks-ohjelmisto julkaistiin vuonna SolidWorks on helppokäyttöinen ohjelma suunnitteluun ja analyysien tekoon, sillä onkin käyttäjiä yli 3 miljoonaa ympäri maailman. SolidWorksin avulla voi nopeasti luoda 2D- ja 3D sketsejä, mallintaa 3D-osia ja kokoonpanoja, sekä tehdä kaikista näistä valmistuspiirustuksia. (SolidWorks 2017a.) SolidWorks-ohjelmistoa on saatavana kolmena eri lisenssivaihtoehtona, jotka ovat standard, professional, ja premium. SolidWorks tarjoaa myös oman premium-versioon pohjautuvan lisenssin opiskelijoille. Standard-versio sisältää perusominaisuuksien lisäksi ohutlevy-, hitsausrakenne-, pintamallinnus-, muotti- ja meistityökalut. Professional-versio tarjoaa standard-version ominaisuuksien lisäksi tiedostonhallintatyökaluja, paremman grafiikkojen renderöinnin, automatisoidun kustannusarvion, automatisoidun suunnittelutyön ja piirustusten tarkistamisen, sekä osakirjaston. Premium-versio sisältää muiden versioiden ominaisuuksien lisäksi simulointityökaluja, käänteisen suunnittelun, sekä putkien ja johtojen reititysominaisuudet. (SolidWorks 2017b.)
 ja")
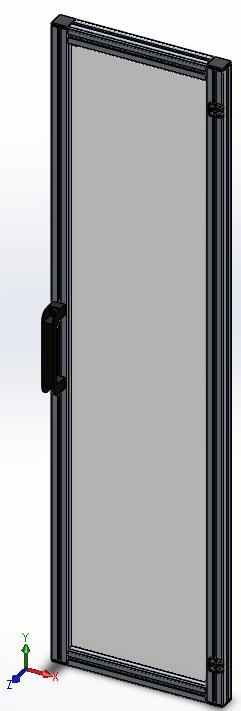
14 Osien käsittely SolidWorksissä SolidWorks tukee yli 30 erilaista 3D-CAD tiedostomuotoa, ohjelmaan voidaan tuoda ja 3Dmalleja voidaan tallentaa näissä tiedostomuodoissa. SolidWorksin avulla tehdyt 3D-mallit kannattaa optimaalisen käytön mahdollistamiseksi tallentaa SolidWorksin omiin tiedostomuotoihin, joita ovat: SLDPRT- (SolidWorks Part Document) ja SLDASMtiedostomuoto (SolidWorks Assembly Document). (SolidWorks 2017c.) SolidWorks sisältää FeatureWorks-apuohjelman, jonka avulla voidaan tunnistaa piirteitä 3D-malleista. FeatureWorksiä käytetään pääasiassa, kun SolidWorksiin tuodaan vieraassa tiedostomuodossa oleva 3D-malli, josta piirteet ovat tunnistamatta. (SolidWorks 2017d.) Esimerkiksi komponenttivalmistajien dokumenttikirjastoissa olevat 3D-mallit ovat usein jossain muussa kuin SolidWorksin omissa tiedostomuodoissa ja tällöin 3D-malleista joudutaan piirteitä tunnistamaan. Kuvassa 5. nähdään vaihteen 3D-malli, jonka piirteitä ei ole tunnistettu. Piirrepuussa lukee tällöin piirrelistauksen sijaan tuotu (engl. Imported) ja osaa ei pystytä muokkaamaan. Tuotaessa vieraissa tiedostomuodoissa olevia 3D-malleja SolidWorksiin, tulee ottaa huomioon, että piirteiden tunnistus ei aina onnistu FeatureWorksin avulla. Kuva 5. Vaihteen 3D-malli, jolle ei ole suoritettu piirteidentunnistusta. SolidWorksissä materiaalin, materiaaliominaisuuksien ja värin määrittäminen tehdään piirrepuun avulla. SolidWorks sisältää materiaalikirjaston, josta voidaan valita 3D-mallille haluttu materiaali. Materiaalikirjastossa olevia materiaalia voidaan muokata ja puuttuvia materiaaleja pystytään myös luomaan määrittämällä kaikki materiaaliominaisuudet halutulle materiaalille. (SolidWorks 2017g.)
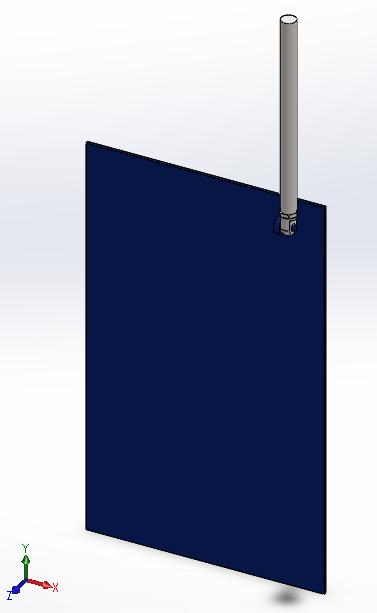
15 Kokoonpanot Kokoonpanot ovat useammasta kuin yhdestä osasta koostuvia kokonaisuuksia, joissa tärkeimmän osan ympärille on tuotu muita tuotteeseen liittyviä osia (Tuhola & Viitanen 2008, s. 98). Kokoonpanot jakautuvat pää- ja osakokoonpanoihin, sekä niiden luonne vaihtelee käyttötarkoituksen mukaan. Pääkokoonpano sisältää kaikki valmiiseen tuotteeseen kuuluvat osat, sekä se koostuu usein yksittäisistä valmiista osista ja osakokoonpanoista. Osakokoonpano on itsenäinen osa jostain suuremmasta kokoonpanosta. Tyypillisiä kokoonpanoja ovat rakenteet, mekanismit, koneet ja edellä mainittujen yhdistelmät. (Tuhola & Viitanen 2008, s ) Kokoonpanojen tavoite on sisällyttää pääkokoonpanoon osien geometrinen informaatio ja määritellä yksittäisten osien paikka (Duhovnik et al. 2015, s. 371). Tärkeää on, että kokoonpanoissa osat ovat asetettu todellista toiminnallista laitetta vastaavaan paikkaan ja asentoon. Kokoonpanojen tulee myös sisältää todellisen laitteen ominaisuudet. (Tuhola & Viitanen 2008, s. 109.) Seuraavissa alaluvuissa esitellään kaksi tyypillisistä kokoonpanon luontistrategiaa: alhaalta ylös-menetelmä ja ylhäältä alasmenetelmä, sekä sidosten käytöstä kokoonpanoissa Alhaalta ylös-menetelmä Alhaalta ylös-menetelmässä (engl. Bottom Up) mallinnetaan ensiksi yksittäiset osat ja osakokoonpanot. Tämän jälkeen pääkokoonpano kootaan näistä valmiiksi mallinnetuista osista ja osakokoonpanoista. Alhaalta ylös-menetelmä soveltuu parhaiten tapauksiin, joissa tehdään 3D-malli jo olemassa olevasta tuotteesta, kokoonpanossa käytetään standardiosia tai kun mallinnus- ja suunnitteluprosessi toteutetaan tiimityönä. (Tuhola & Viitanen 2008, s. 103; Hietikko 2012, s. 135.) Kuvassa 6. havainnollistetaan alhaalta ylös-menetelmän käyttöä yksinkertaisen kokoonpanon mallinnuksessa. Kuvan 6. tapauksessa mutteri (pt1) ja paneeli (pt2) ovat mallinnettu ensin erikseen yksittäisinä osina. Tämän jälkeen kokoonpano on koottu neljästä mutterista ja yhdestä paneelista. Jos kokoonpanon osia halutaan muokata, täytyy muutokset tehdä yksittäisen osan 3D-malliin kokoonpanon ulkopuolella. Tehdyt muokkaukset kuitenkin päivittyvät myös kokoonpanoihin, joissa muokattua osaa on käytetty. (Duhovnik et al. 2015, s. 372.)
 osat mallinnetaan kokoonpanossa suoraan halutulle paikalle tai vähintään yksi osan piirre määritetään muun kokoonpanon avulla.")
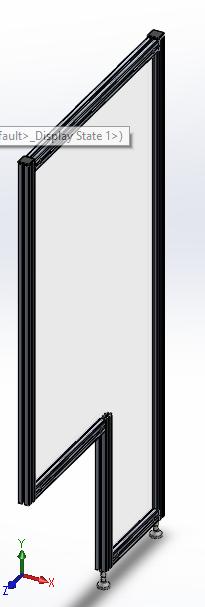
16 16 Kuva 6. Esimerkki alhaalta ylös-menetelmän käytöstä yksinkertaista kokoonpanoa mallinnettaessa (Duhovnik et al. 2015, s. 372) Ylhäältä alas-menetelmä Ylhäältä alas-menetelmässä (engl. Top Down) osat mallinnetaan kokoonpanossa suoraan halutulle paikalle tai vähintään yksi osan piirre määritetään muun kokoonpanon avulla. Osamallinnuksessa voidaan tällöin hyödyntää tällöin muiden kokoonpanon osien visuaalisuutta ja geometriaa. (Hietikko 2012, s. 135; Planchard 2014 s ) Ylhäältä alas-menetelmän vahvuutena on, että suunnitelmien muuttuessa uudelleen tehtävää mallinnustyötä tarvitsee tehdä vähemmän ja kaikkien osien ei tarvitse olla hahmotteluvaiheessa vielä yksityiskohtia myöten valmiita. Ylhäältä-alas-menetelmällä mallinnettaessa kokoonpanossa osien ja osien piirteiden välille muodostuu yhteyksiä, joiden mukaisesti osat päivittyvät automaattisesti tehtäessä muutoksia kokoonpanoon. (Planchard 2014 s ) Kuvassa 7. havainnollistetaan ylhäältä alas-menetelmän käyttöä kokoonpanoa tehtäessä. Osa 1. (pt1) on mallinnettu aluksi kokoonpanon ensimmäiseksi osaksi. Tämän jälkeen osa 2. (pt2) on mallinnettu käyttäen osan 1. haarukan leveyttä osan 2. leveyden määrittelemiseen. Jos osan 1. haarukan leveyttä muokataan, muuttuu osan 2. leveys osien välille muodostuneen yhteyden takia.

17 17 Kuva 7. Esimerkki ylhäältä alas-menetelmän käytöstä yksinkertaista kokoonpanoa mallinnettaessa (Duhovnik et al. 2015, s. 373). Usein käytetään myös alhaalta ylös - ja ylhäältä alas menetelmien sekoitusta. Esimerkiksi kokoonpanoon voidaan tuoda standardiosia, osa osista mallinnetaan erikseen ja liitetään kokoonpanoon, sekä sitten loput osat mallinnetaan kokoonpanossa. (Hietikko 2012, s. 135.) Sidokset Kun osa tuodaan kokoonpanoon, sillä on kuusi vapausastetta: rotaatio x-, y- ja z-akselien suhteen, sekä liike x-, y- ja z-akselien suunnassa. Jotta kappaleen paikka ja orientaatio olisi määritelty 3D-tilassa, tulee kaikki sen vapausasteet poistaa. Vapausasteita poistetaan luomalla rajoitteita (engl. Constraints), jotka muodostavat geometrisia yhteyksiä kokoonpanossa esimerkiksi osien pintojen, särmien ja välille. (Short & Pritchett 2009, s. 210.) Kun osan paikka on täysin määritelty kokoonpanossa rajoitteiden avulla, se ei voi muuttaa esimerkiksi asentoaan peruskoordinaatistoonsa nähden (Tuhola & Viitanen 2008, s ). Kokoonpanon ensimmäinen osa kannattaa olla lopputuotteen kannalta se kaikkein keskeisin osa, johon muut tuotteen osat kytkeytyvät. Kokoonpanon ensimmäisen osan paikka ja asento on automaattisesti määritetty, muut osat sidotaan kokoonpanoon ensimmäisen osan suhteen. (Hietikko 2012, s. 135.) SolidWorksissä luodaan rajoitteita ja kytketään osia yhteen sidoksilla (engl. Mates). Sidokset jakautuvat ohjelmistossa tavallisiin sidoksiin (engl. Standard mates), kehittyneisiin
 Tavalliset sidokset ovat käytetyimpiä ja niiden avulla saadaan tehtyä suurin osa kaikista kokoonpanoista. Kuvassa 8. havainnollistetaan käytetyimmät tavalliset sidokset: a) samankeskinen (engl.")
18 18 sidoksiin (engl. Advanced mates) ja mekaanisiin sidoksiin (engl. Mechanical mates). (Short & Pritchett 2009, s ; SolidWorks 2017e.) Tavalliset sidokset ovat käytetyimpiä ja niiden avulla saadaan tehtyä suurin osa kaikista kokoonpanoista. Kuvassa 8. havainnollistetaan käytetyimmät tavalliset sidokset: a) samankeskinen (engl. Concentric), b) etäisyys pintojen välillä (engl. Distance between faces), c) pintojen yhdistäminen (engl. Coincident), d) kohtisuorat pinnat (engl. Perpendicular) ja e) tangentiaalinen eli toisiaan sivuavat pinnat (engl. Tangent). Kuvasta puuttuu yksi hyödyllinen sidos, joka on pintojen yhdensuuntaisuus (engl. Parallel). (Duhovnik et al. 2015, s ; SolidWorks 2017e.) Kuva 8. Tyypillisiä kokoonpanoissa käytettäviä tavallisia sidoksia (Duhovnik et al. 2015, s. 375). Kehittyneillä ja mekaanisilla sidoksilla voidaan lisätä kokoonpanoon erilaisia ominaisuuksia. Tuholan ja Viitasen (2008, s. 113) mukaan kehittyneillä ja mekaanisilla sidoksilla voidaan määritellä muun muassa liikemääriä, vierintäominaisuuksia, mekanismin toimintaparametreja, osien sijaintiehtoja ja osien riippuvuussuhteita toisiinsa nähden. Mekanismien toimintaa ja liikeratoja voidaan säädellä muokkaamalla kehittyneiden ja mekaanisten sidosten parametreja (Tuhola & Viitanen 2008, s. 116).
 ja mekaaniset sidokset (oikealla). Kokoonpanoja tehtäessä on tärkeää ottaa huomioon niiden käyttäytyminen muokkauksia tehtäessä.")

19 19 Kuvassa 9. esitellään SolidWorksissä käytettävissä olevat kehittyneet - ja mekaaniset sidokset. Kuva 9. SolidWorksissä käytettävissä olevat kehittyneet- (vasemmalla) ja mekaaniset sidokset (oikealla). Kokoonpanoja tehtäessä on tärkeää ottaa huomioon niiden käyttäytyminen muokkauksia tehtäessä. Etenkin isoja kokoonpanoja käsiteltäessä voi joutua tekemään paljon ylimääräistä työtä huonosti suunniteltujen kokoonpanorakenteiden ja sidosten takia. Kokoonpanossa oleva sidos voi purkautua ja virheilmoitus muodostua muokattaessa osien pintoja, joiden välille sidos on kokoonpanossa määritetty. Sidoksien määrittämistä osien välillä ristiin kannattaa välttää, sillä niiden järjestystä voi olla vaikea ymmärtää ja ne ovat herkempiä sidosten purkautumiselle ja muille sidosvirheille. Pahimmassa tapauksessa kokoonpano voi sidosten purkautuessa hajota sekalaisesti tai mallinnusohjelma voi kaatua. (Tuhola & Viitanen 2008, s ) Kuvassa 10. havainnollistetaan hyvää ja huonoa tapaa määritellä sidoksia osien välille. Vasemmalla olevassa tapauksessa osat ovat yksittäin sidottu kokoonpanon ensimmäiseen ja keskeisimpään osaan, tämä on suositeltava tapa muodostaa sidoksia. Oikealla puolella on esimerkki huonosta sidosten määrittelystä. Osat ovat sidottu ketjuna toisiinsa, jolloin ketjussa olevia osia muokattaessa voi kokoonpanosta purkautua useita sidoksia. (SolidWorks 2017f.)

20 20 Kuva 10. Esimerkki hyvästä (kuvassa vasemmalla) ja huonosta (kuvassa oikealla) sidosten määrittelyrakenteesta kokoonpanossa (SolidWorks 2017f). Kokoonpanorakennetta ja osakokoonpanoja suunniteltaessa täytyy ottaa myös huomioon rajoitteet kehittyneiden ja mekaanisia sidosten käytössä. Jos jokin mekanismi on koottu osakokoonpanoksi, lukittuvat toiminnallisten ominaisuuksien määrittämiseen käytetyt kehittyneet ja mekaaniset sidokset tuotaessa se toiseen kokoonpanoon. (Tuhola & Viitanen 2008, s. 105.)
21 21 3 MIKROTYÖSTÖLINJAN MALLINNUS Mikrotyöstölinjan mallinnuksessa hyödynnettiin teoriaosuudessa käsiteltyjä asioita ja mallinnus tehtiin vuoden 2016 SolidWorks 3D-suunnitteluohjelmiston opiskelijaversiolla. Tässä luvussa käsitellään tämän kandidaatintyön käytännön osuutta mikrotyöstölinjan mallinnuksesta. Mikrotyöstölinjan yksittäisten osien 3D-mallien tulee olla umpinaisia malleja, jotta ne voivat sisältää täydelliset tiedot osien geometriasta ja koostumuksesta. Osille täytyy myös määrittää todelliset materiaaliominaisuudet. Mallinnettavassa kokoonpanossa kaikkien osien paikka ja asento tulee olla määritelty sidosten avulla todellista mikrotyöstölinjaa vastaavalla tavalla. Kokoonpanon tulee sisältää kaikki mikrotyöstölinjan todelliset ominaisuudet eli kokoonpanossa määritetään toimilaitteiden liikealueet ja -radat fyysistä laitetta vastaavalla tavalla. Liitteen I taulukossa esitetään mikrotyöstölinjan toimilaitteet, toimilaitteiden liikeradan pituus ja sen suunta, sekä mahdollinen toimilaitteen liikealueen tai liikeradan rajoite. Mikrotyöstölinjan kokoonpano tehtiin alhaalta ylös-menetelmää käyttäen, koska osia ei tarvinnut suunnitella itse ja aineisto sisälsi jo kokoonpanon mikrotyöstölinjasta. Alhaalta ylös-menetelmän käyttö oli myös järkevää, koska kokoonpanossa käytettiin pääasiassa saadun aineiston sisältämiä osia ja osavalmistajien tuottamia 3D-malleja. Tarvittaessa osia mallinnettiin myös itse. Mikrotyöstölinjan kokoonpano tehtiin alusta asti uudelleen, koska saadun aineiston sisältämän kokoonpanon osien 3D-mallit olivat STP-tiedostomuodossa ja siten SolidWorksiin tuonnin jälkeen 3D-malleista olivat piirteet tunnistamatta. Piirteiden tunnistuksen jälkeen osasta syntyi uusi tiedosto, eivätkä siten tunnistetut piirteet päivittyneet kokoonpanoon. Aineiston sisältämä mikrotyöstölinjan kokoonpano toimi siis tässä tutkimuksessa tehtävän kokoonpanon mallina, josta nähtiin haluttu osien sijainti ja asento. Alhaalta ylös-menetelmän mukaisesti kaikki mikrotyöstölinjan osat käsiteltiin ensin yksitellen valmiiksi. Tämän jälkeen mikrotyöstölinjan osista muodostettiin tarvittavat alikokoonpanot, sekä lopuksi pääkokoonpano mallinnettiin alikokoonpanoista ja siihen määritettiin vaaditut ominaisuudet.

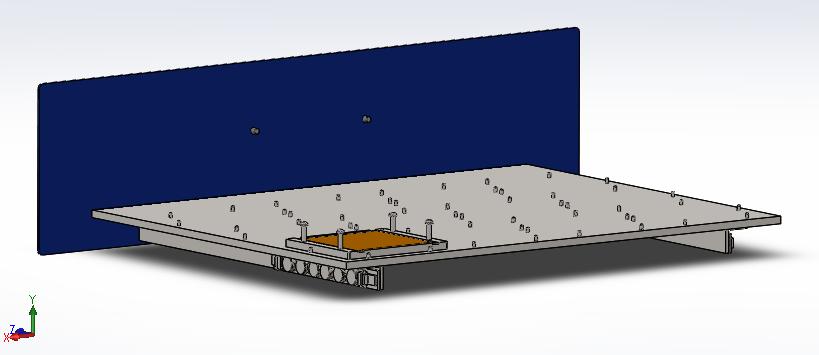
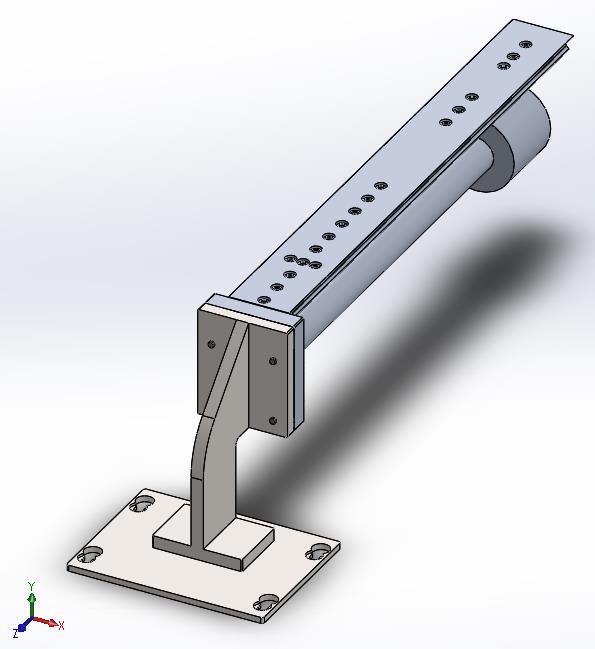
22 Osien käsittely Saadun aineiston sisältämä kokoonpano mikrotyöstölinjasta oli STP-tiedostomuodossa. STP on laajalti käytetty 3D CAD-tiedostomuoto ja sitä käytetään usein vietäessä 3D-malleja toiseen 3D CAD-suunnitteluohjelmistoon. Aineiston mikrotyöstölinjan kokoonpano tuotiin aluksi SolidWorksiin. Kokoonpano sisälsi virheellisiä osia ja osien välillä ei ollut sidoksia. Kuvasta 11. nähdään SolidWorksiin tuodun mikrotyöstölinjan kokoonpanon piirrepuu, virheellisiä osia sisältävät osakokoonpanot näkyvät piirrepuussa keltaisena. Kuva 11. Aineiston sisältämän mikrotyöstölinjan kokoonpanon piirrepuu. Kokoonpanon SolidWorksiin tuonnin jälkeen osien 3D-mallit olivat SolidWorksin omassa SLDPRT-tiedostomuodossa, mutta 3D-mallien piirteet olivat yhä tunnistamattomassa muodossa. Piirteiden tunnistus täytyi siis suorittaa FeatureWorksin avulla yksitellen jokaisen osan 3D-mallille, jotta niiden kaikki ominaisuudet olivat käytettävissä ja niitä pystyttäisiin tarvittaessa muokkaamaan. Mikrotyöstölinja sisältää 102 erilaista osaa. Aineiston osista neljän 3D-malli oli virheellinen ja piirteiden tunnistus ei onnistunut 36:n osan 3D-mallille. Virheellisiä 3D-malleja ei lopullisessa kokoonpanossa saanut olla ja tavoitteena oli, että kaikkien osien 3D-malleista on tunnistettu piirteet. Kyseisten osien kohdalla oli siten vaihtoehtona joko mallintaa osat

23 23 itse tai ladata osavalmistajan tuottama 3D-malli valmistajan dokumenttikirjastosta. Osien mallintaminen alusta asti uusiksi on monimutkaisten kappaleiden kohdalla työlästä, joten järkevintä oli ensiksi ladata osavalmistajan tuottama 3D-malli. Jos osavalmistajan tuottaman 3D-mallin kanssa oli ongelmia tai osa oli yksinkertainen, mallinnettiin osa itse. Monimutkaiset osat, jotka jouduttiin mallintamaan itse, mallinnettiin yksinkertaistettuina tilavuusmalleina puutteellisten tietojen ja taitojen takia. Valmistajien tuottamista 3Dmalleista osa oli yksinkertaistettuja tilavuusmalleja, mutta jos ne olivat muuten virheettömiä ja piirteiden tunnistus onnistui, ei osia mallinnettu enää itse uudelleen. Kuvassa 12. on aineiston sisältämä virheellinen 3D-malli manipulaattorin komponentista. Kuva 12. Aineiston sisältämä virheellinen 3D-malli manipulaattorin komponentista. Liite II sisältää mikrotyöstölinjan osaluettelon. Osaluettelossa kerrotaan, onko tässä kandidaatintyössä mallinnetussa kokoonpanossa käytetyn osan 3D-malli saadusta aineistosta, ladattu osavalmistajan dokumenttikirjastosta vai mallinnettu itse. Osaluettelossa näkyy lisäksi, että onko osan 3D-malli yksinkertaistettu tilavuusmalli vai tarkka umpinainen malli.

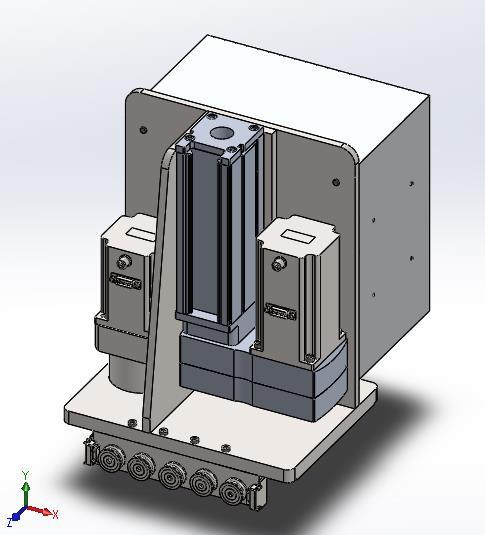
24 24 Seuraavaksi mikrotyöstölinjan osien 3D-malleille määritettiin niiden todellinen materiaali ja väri. Mikrotyöstölinjan osien todelliset materiaalit löytyivät saadusta aineistosta tai osavalmistajien tuoteluetteloista. Jos osan materiaalia ei löytynyt SolidWorksin materiaalikirjastosta, valittiin 3D-mallin materiaaliksi jokin ominaisuuksiltaan vastaava materiaali tai SolidWorksin materiaalikirjastossa olevaa materiaalia muokattiin todellista materiaalia vastaavaksi. Kuvassa 13. on valmistajan tuottama manipulaattorin komponentin tarkka umpinainen malli, josta piirteet ovat tunnistettu, sekä sen materiaali ja väri on määritetty. Tämä osa vastaa ominaisuuksiltaan kaikkia asetettuja vaatimuksia. Kun kaikkien mikrotyöstölinjan osien 3D-mallit olivat käsitelty vastaamaan haluttuja vaatimuksia, siirryttiin osakokoonpanojen mallinnukseen. Kuva 13. Valmistajan tuottama manipulaattorin komponentin tarkka umpinainen malli, josta piirteet ovat tunnistettu, sekä sen materiaali ja väri on määritetty. 3.2 Osakokoonpanot Mikrotyöstölinja sisältää toimilaitteita ja kuten aiemmin teoriaosuudessa todettiin, osakokoonpanoihin määritetyt mekanismit lukittuvat sijoitettaessa niitä pääkokoonpanoon. Tämän takia osakokoonpanot jaoteltiin toimilaitteiden liikkuvien kokonaisuuksien mukaisesti niin, ettei yksikään osakokoonpano itse sisällä yhtäkään liikkuvaa osaa. Taulukossa 1. on numeroituna mikrotyöstölinjan 12. eri osakokoonpanoa.
25 25 Taulukko 1. Mikrotyöstölinjan osakokoonpanot. Numero Osakokoonpanon nimi 1. Työstöasema 2. Latausasema 3. Manipulaattorirunko 4. Työstöaseman ovi 5. Työstöaseman suojaluukku 6. Päätysuoja 7. Latausaseman huoltoluukku 8. Latausaseman lataustason johde 9. Latausaseman lataustaso 10. Manipulaattorin y-suunta 11. Manipulaattorin z-suunta 12. Manipulaattorin luukku Osien sijoitteluun osakokoonpanoihin otettiin mallia saadun aineiston sisältämän mikrotyöstölinjan kokoonpanosta. Osien paikan ja asennon määrittämisessä osakokoonpanoissa käytettiin vain tavallisia sidoksia, koska osakokoonpanot eivät sisällä toimilaitteiden liikkuvia osia. Osakokoonpanoissa vältettiin määrittämästä sidoksia ristiin ja ketjuksi osien välille, jottei syntyisi ongelmia sidosten purkautumisen kanssa mahdollisia muokkauksia tehdessä. Liite III sisältää kuvat kaikista mikrotyöstölinjan osakokoonpanoista. 3.3 Pääkokoonpano Osakokoonpanojen muodostamisen jälkeen siirryttiin mikrotyöstölinjan pääkokoonpanon mallinnukseen. Pääkokoonpano mallinnettiin käyttäen aiemmin muodostettuja alikokoonpanoja. Mikrotyöstölinjan pääkokoonpanon rakenne on osakokoonpanojen osalta kuvan 14. mukainen. Kuvan 14. rakenteesta on jätetty pois osakokoonpanojen sisältämät osat selkeyden säilyttämiseksi. Osakokoonpanoja tuotiin pääkokoonpanoon rakennekuvan mukaisesti järjestyksen suuntautuen ylimmästä tasosta alaspäin.
. Seuraavaksi pääkokoonpanoon tuotiin kaksi päätysuojaa (6.). Työstöasemien, latausaseman ja päätysuojien osakokoonpanot ovat kiinteitä rakenteita, jotka eivät siis liiku pääkokonpanossa.")

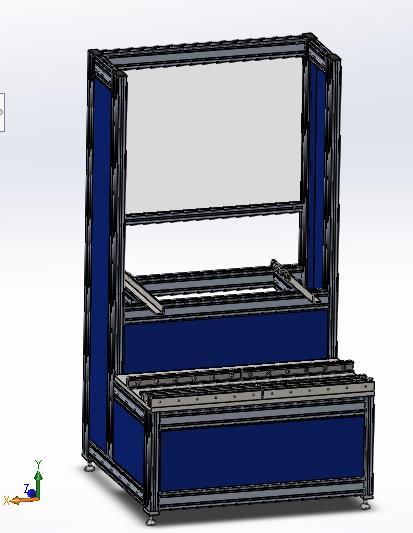
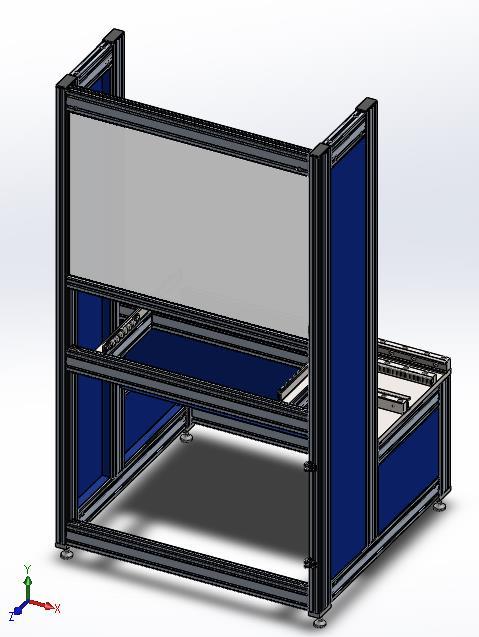
26 26 Kuva 14. Mikrotyöstölinjan pääkokoonpanon rakenne. Pääkokoonpanoon sijoitettiin aluksi kuvan 14. rakenteen ylin taso eli kaksi työstöasemaa (1.) ja latausasema (2.). Seuraavaksi pääkokoonpanoon tuotiin kaksi päätysuojaa (6.). Työstöasemien, latausaseman ja päätysuojien osakokoonpanot ovat kiinteitä rakenteita, jotka eivät siis liiku pääkokonpanossa. Näiden kokoonpanojen paikka ja asento määrättiin siten käyttäen tavallisia sidoksia. Työstöasemien, latausaseman ja päätysuojien sijoittamisen jälkeen mikrotyöstölinjan pääkokoonpano oli kuvan 15. mukainen. Kuva 15. Mikrotyöstölinjan pääkokoonpano työstöasemien, latausaseman ja päätysuojien sijoituksen jälkeen.
27 27 Osakokoonpanot ja ovat mikrotyöstölinjan toimilaitteita tai toimilaitteiden osia. Näiden osakokoonpanojen ja erilaisten sidosten avulla pääkokoonpanoon mallinnettiin mikrotyöstölinjan todelliset toimilaitteiden ominaisuudet. Manipulaattorirunko (3.) kiinnitettiin tavallisilla sidoksilla latausaseman ja työstöaseman kuljetuskiskoihin. Manipulaattori ei saa osua päätysuojiin, joten sen liike x-suunnassa täytyi rajoittaa. Tämä toteutettiin kokoonpanossa kehittyneellä liikeratasidoksella rajoittaen manipulaattorirungon liikeradan 5 mm etäisyydelle molemmista päätysuojista. Tällöin manipulaattorin koko liikeradan pituus x-suunnassa on 1505 mm (Liite IV 1.). Manipulaattorin y-suunnan osakokoonpano (10.) kiinnitettiin manipulaattorirunkoon tavallisilla sidoksilla ja liikeratasidoksella sen liikeradaksi määriteltiin y-suunnassa 100 mm (Liite IV 2.). Manipulaattorin z-suunnan osakokoonpano kiinnitettiin manipulaattorin y-suunnan osakokoonpanoon tavallisilla sidoksilla ja liikeratasidoksella sen liikeradaksi määriteltiin z- suunnassa 300 mm (Liite IV 3.). Liitteen I taulukon mukaan työstöasemien oven (4.), latausaseman huoltoluukun (7.) ja manipulaattorin luukun (12.) liikeradan pituutta ei ole määritelty, mutta niiden liikerataa rajoittaa todellisuudessa osuminen mikrotyöstölinjan muihin osiin. Jotta rajoitteet toteutuisi, määritettiin työstöasemien oven, latausaseman huoltoluukun ja manipulaattorin luukun aukeavan kokoonpanossa 90 vastapäivään. Nämä ominaisuudet määritettiin kokoonpanossa mekaanisiin sidoksiin kuuluvan saranasidoksen (engl. Hinge mate) avulla (Liitteet IV 4., IV 6. ja IV 7.). Työstöasemien suojaluukut (5.) kiinnitettiin työstöasemiin tavallisilla sidoksilla ja niiden liikeradaksi määritettiin kehittyneellä liikeratasidoksella y-suunnassa 300 mm (Liite IV 5.). Lataustason johteet sisältävät kaksi liukupintaa, joten kokoonpanossa lataustason toiminta vaati kaksi erikseen määritettävää liikerataa. Lataustason johde (8.) kiinnitettiin latausaseman z-suunnassa oleviin kiskoihin tavallisilla sidoksilla ja kehittyneellä liikeratasidoksella sen liikeradaksi on määritetty z-suunnassa 302 mm (Liite IV 8.). Lataustaso (9.) kiinnitettiin lataustason johteisiin tavallisilla sidoksilla ja kehittyneellä liikeratasidoksella sen liikeradaksi on myös määritetty z-suunnassa 302 mm (Liite IV 9.). Tällöin lataustason liikeradan pituudeksi tulee kokonaisuudessaan todellista vastaava 604 mm.
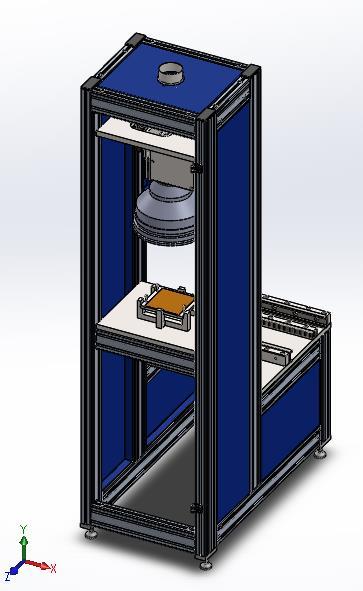
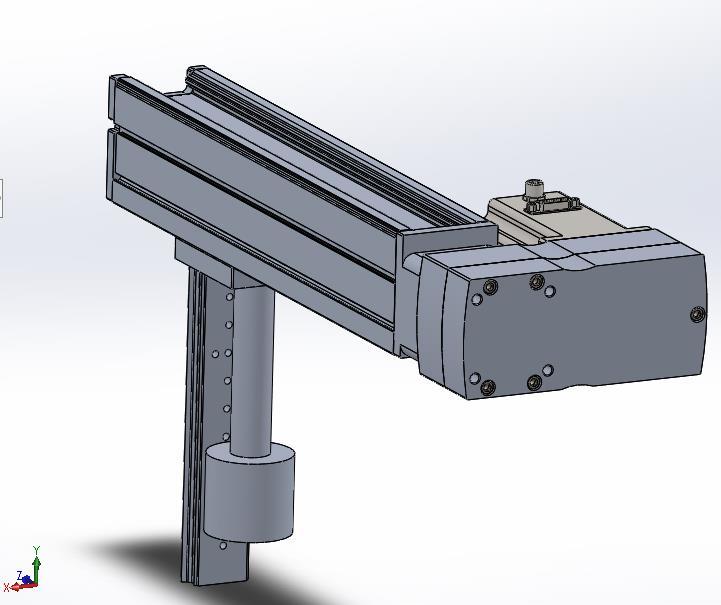
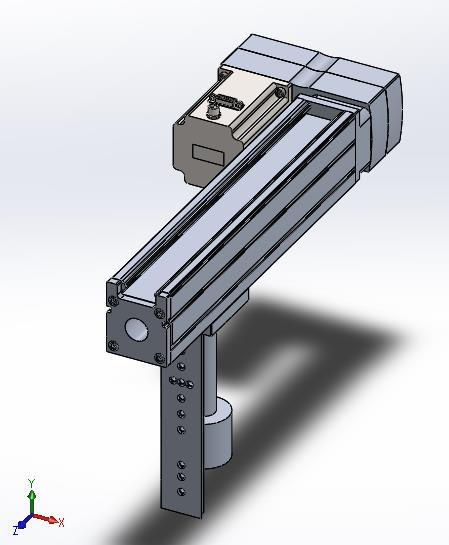
28 28 4 TULOKSET Mikrotyöstölinjan 3D-mallin onnistumista voidaan määritellä vertaamalla mallinnetun kokoonpanon ominaisuuksia vaadittuihin ominaisuuksiin. Mallinnettu kokoonpano ei sisällä virheellisiä osia ja kaikkien osien 3D-mallien piirteet ovat muokattavissa. Tavoitteena oli, että kaikki kokoonpanon osat vastaisivat todellisuutta geometrialtaan, koostumukseltaan ja materiaaliominaisuuksiltaan eli tämän toteutumiseksi kaikkien kokoonpanon osien 3Dmallien pitäisi olla tarkkoja umpinaisia malleja. Kokoonpanon 102:sta osasta tarkkoja umpinaisia malleja on 87 kappaletta (85%) ja yksinkertaistettuja tilavuusmalleja on 15 kappaletta (15%). Osien 3D-malleista peräisin on saadusta aineistosta 62 kappaletta, osavalmistajien dokumenttikirjastoista 15 kappaletta, sekä itse mallinnettuja osia on 25 kappaletta. Jokaisen osan 3D-mallille on määritetty materiaali ja väri mahdollisimman tarkasti vastaamaan todellisia materiaaliominaisuuksia. Kokoonpanossa jokainen osa on todellista vastaavalla paikalla ja oikeassa asennossa. Jokaisen osan paikka ja asento on myös määritetty täysin sidosten avulla, eikä osilla siten ole kokoonpanossa vapausasteita. Kuvassa 16. nähdään käytännön osuudessa mallinnettu mikrotyöstölinjan kokoonpano.

29 29 Kuva 16. Käytännön osuudessa mallinnettu mikrotyöstölinjan kokoonpano. Taulukosta 2. nähdään kaikki mikrotyöstölinjan kokoonpanoon määritetyt liikeradat, liikeratojen suunta ja liikeratojen määrittämiseen käytetyt sidostyypit. Verrattaessa taulukkoa 2. liitteen I taulukkoon, nähdään että mikrotyöstölinjan kokoonpanosta puuttuu työstöaseman laserin skannerin korkeussäätö. Taulukko 2. Mikrotyöstölinjan kokoonpanoon määritetyt liikeradat, liikeratojen suunta ja liikeratojen määrittämiseen käytetyt sidostyypit. Liikerata Suunta Sidostyyppi Manipulaattorin x-suunta 1505 mm X Kehittynyt sidos, liikerata Manipulaattorin y-suunta 100 mm Y Kehittynyt sidos, liikerata Manipulaattorin z-suunta 300 mm Z Kehittynyt sidos, liikerata Manipulaattorin luukku 90 Vastapäivään Mekaaninen sidos, sarana
30 30 Liikerata Suunta Sidostyyppi Työstöaseman suojaluukku 300 mm Y Kehittynyt sidos, liikerata Työstöaseman ovi 90 Vastapäivään Mekaaninen sidos, sarana Latausaseman huoltoluukku 90 Vastapäivään Mekaaninen sidos, sarana Latausaseman lataustason johde 302 mm Z Kehittynyt sidos, liikerata Latausaseman lataustaso 302 mm Z Kehittynyt sidos, liikerata Mikrotyöstölinjan kokoonpanossa ei ole määritelty liitteen I taulukossa esitettyjä liikeratojen rajoitteita manipulaattorin z-suunnalle ja työstöaseman suojaluukulle. Tämän takia kokoonpanossa manipulaattorin käsivarsi pystyy törmäämään työstöaseman ja työstöaseman suojaluukun kanssa.
31 31 5 POHDINTA JA JOHTOPÄÄTÖKSET Tämän kandidaatintyön näkökulmasta tehtyjä 3D-mallinnukseen liittyviä tutkimuksia ei Lappeenrannan teknillisen yliopiston LUT Finna-tietokannasta löytynyt, joten käytännön osuuden vertailua aikaisempiin tutkimuksiin ei voida suorittaa. Teoriaosuudessa käsitellyt asiat ovat 3D-mallintamiseen liittyviä perusteita ja eri lähteistä saadut tiedot tukivat toisiaan hyvin. Mikrotyöstölinjan kokoonpanon osia käsiteltäessä, piirteet tunnistettiin jokaisen osan 3Dmallista. Piirteiden tunnistus SolidWorksin FeatureWorks-apuohjelman avulla on aikaa vievää ja monimutkaisten osien kaikkien 3D-mallin piirteiden tunnistamiseen voi kulua useita minuutteja. Mikrotyöstölinjan osien 3D-mallien piirteiden tunnistamiseen kului yhteenlaskettuna useita tunteja. Suunniteltaessa kokoonpanon mallintamista tulisi ottaa huomioon piirteiden tunnistamiseen kuluva aika. Kokoonpanon mallintamista suunniteltaessa tulisi siten miettiä tarvitseeko kaikkia osia muokata kokoonpanon elinkaaren aikana ja voidaanko siten säästää aikaa jättämällä piirteiden tunnistaminen väliin joidenkin osien kohdalla. Mikrotyöstölinjan kokoonpanossa on käytetty tarkkojen umpinaisten mallien lisäksi yksinkertaistettuja tilavuusmalleja. Yksinkertaistettuja tilavuusmalleja käytettiin kokoonpanossa, koska kaikkia itse mallinnettuja osia ei puutteellisten tietojen ja taitojen takia onnistuttu mallintamaan tarkasti. Lisäksi suurin osa osavalmistajien dokumenttikirjastoista ladatuista osien 3D-malleista oli yksinkertaistettuja tilavuusmalleja. Tarkkojen umpinaisten mallien tuottaminen vaatii huomattavasti enemmän aikaa ja mallinnustaitoja kuin yksinkertaisten tilavuusmallien mallintaminen. Tämä on luultavasti yksi syistä, miksi ilmaiseksi jaettavissa olevat osavalmistajien tuottamat 3D-mallit ovat usein tarkkuudeltaan vain yksinkertaistettuja tilavuusmalleja. Osien 3D-mallien tarkkuus tulisi ottaa myös huomioon suunniteltaessa tuotteiden mallinnusta. Yksinkertaistettujen tilavuusmallien käyttö ajan säästämiseksi on järkevää, jos 3D-mallien tarkkuudella ei ole merkitystä. Esimerkiksi yksinkertaistettuja tilavuusmalleja voi hyödyntää, kun 3Dmallinnusta käytetään vain tuotteiden esittämiseen tai niiden ulkogeometrian suunnitteluun.
32 32 Mikrotyöstölinjan kokoonpanon rakenteen ja kokoonpanossa käytettävien sidosten suunnitteluun käytettiin liian vähän aikaa ennen mallinnuksen aloittamista. Tämän takia pääkokoonpanoa mallinnettaessa jouduttiin vielä muokkaamaan osakokoonpanoja ja yksittäisiä osia. Muokkauksista johtuen pääkokoonpanossa purkautui sidoksia ja niitä jouduttiin määrittämään uudestaan. Jos ennen mallinnuksen aloittamista olisi käytetty enemmän aikaa esimerkiksi osakokoonpanojen suunnitteluun, mikrotyöstölinjan pääkokoonpanon mallinnuksessa olisi päästy samaan lopputulokseen pienemmällä työmäärällä. Mikrotyöstölinjan kokoonpanoon määritetyt liikeradat vastaavat todellisuutta, mutta kokoonpanosta kuitenkin puuttuu toimilaitteiden ominaisuuksia yksinkertaistettujen tilavuusmallien käytön takia. Esimerkiksi laserin skannerin korkeussäätöä ei kokoonpanoon pystytty määrittämään, koska skannerin alustan valmistajan tuottama 3D-malli on mallinnettu yksinkertaistetusti yhtenä kiinteänä osana. Kaikkia törmäysrajoitteita ei mikrotyöstölinjan kokoonpanoon onnistuttu määrittämään SolidWorksissä käytettävissä olevien sidosten avulla. Kyseiset rajoitteet tulisi kuitenkin olla olemassa, jotta kokoonpano vastaisi todellista fyysistä laitetta. Tämän kandidaatintyön keskeisin johtopäätös on tarkkojen umpinaisten mallien käytön tärkeys, kun 3D-mallinnuksen tavoitteena on tehdä ominaisuuksiltaan todellista fyysistä laitetta vastaava kokoonpano. Ainoastaan tarkkoja umpinaisia malleja sisältävä kokoonpano voi vastata kaikilta ominaisuuksiltaan todellisuutta. Yksinkertaistetut tilavuusmallit eivät kuvaa kappaleiden ominaisuuksia riittävän tarkasti ja niiden avulla kokoonpanoon ei pystytä määrittämään kaikkia toimilaitteiden liikeratoja tai muita ominaisuuksia. Tutkimuksen uutuusarvona voidaan pitää ilmaiseksi ladattavissa olevien osavalmistajien tuottamien 3D-mallien soveltumattomuutta todellisen fyysisen koneen mallinnukseen. Mikrotyöstölinjan kokoonpanossa käytetyt osavalmistajien tuottamat 3D-mallit eivät olleet riittävän tarkkoja osien todellisten ominaisuuksien kuvaamiseen. Tämän tutkimuksen
33 33 tuloksia voidaan hyödyntää erilaisissa kokoonpanojen 3D-mallinnukseen liittyvissä tutkimuksissa. Tärkein jatkotutkimusaihe tälle tutkimukselle on mikrotyöstölinjan kokoonpanossa olevien yksinkertaistettujen tilavuusmallien tarkentaminen. Mikrotyöstölinjan kokoonpano voi vastata ominaisuuksiltaan todellista fyysistä laitetta vasta, kun kaikki kokoonpanossa käytetyt 3D-mallit ovat tarkkoja umpinaisia malleja. Toinen merkittävä jatkotutkimusaihe on mallinnetun mikrotyöstölinjan kokoonpanon käyttäminen simulointiympäristössä.
34 34 6 YHTEENVETO Kandidaatintyössä tutkittiin mikrotyöstölinjan 3D-mallinnusta. Työn tavoitteena oli selvittää, miten 3D-suunnitteluohjelmistolla mallinnetaan mikrotyöstölinjasta kokoonpano, joka vastaa ominaisuuksiltaan todellista fyysistä konetta. Kandidaatintyöstä rajattiin pois mallinnettavan mikrotyöstölinjan kokoonpanon jatkokäyttö. Työ jakautui teoriaosuuteen ja käytännön osuuteen. Teoriaosuudessa käsiteltiin 3Dmallinnuksen perusteita, kokoonpanojen muodostamista ja SolidWorks 3Dsuunnitteluohjelmiston käyttöä. Lähteinä käytettiin Lappeenrannan teknillisen yliopiston tietokantoja, kansainvälisiä e-kirjatietokantoja ja SolidWorksin www-sivuja. Käytännön osuudessa mallinnettiin mikrotyöstölinjan kokoonpano SolidWorks 3Dsuunnitteluohjelmistolla hyödyntäen teoriaosuuden tietoja ja mikrotyöstölinjasta saatua aineistoa. Työn tuloksissa verrattiin käytännön osuudessa mallinnetun mikrotyöstölinjan kokoonpanon ominaisuuksia todellisen fyysisen koneen ominaisuuksiin. Tulosten perusteella kandidaatintyön keskeisimpänä johtopäätöksenä voidaan pitää tarkkojen umpinaisten mallien käytön tärkeyttä, kun 3D-mallinnuksen tavoitteena on tehdä ominaisuuksiltaan todellista fyysistä laitetta vastaava kokoonpano. Tutkimuksen tulosten perusteella ainoastaan tarkkoja umpinaisia malleja sisältävä kokoonpano voi vastata kaikilta ominaisuuksiltaan todellisuutta.
35 35 LÄHTEET Duhovnik, J., Demšar, I. & Drešar, P Space Modeling with SolidWorks and NX. Cham: Springer. 490 s. Hietikko, E SolidWorks Tietokoneavusteinen suunnittelu painos. Kuopio: Savonia-ammattikorkeakoulu. 315 s. Hirz, M., Dietrich, W., Gfrerrer, A. & Lang, J Integrated Computer-Aided Design in Automotive Development. Berlin: Springer. 466 s. Planchard, D.C SolidWorks 2014 Reference Guide. Mission: SDC Publications. s Short, T. & Pritchett, M Learning SolidWorks painos. Illinois: Goodheart- Willcox Company. s SolidWorks. 2017a. [SolidWorksin www-sivuilla]. [Viitattu ]. Saatavissa: SolidWorks. 2017b. [SolidWorksin www-sivuilla]. [Viitattu ]. Saatavissa: SolidWorks. 2017c. [SolidWorksin www-sivuilla]. [Viitattu ]. Saatavissa: SolidWorks. 2017d. [SolidWorksin www-sivuilla]. [Viitattu ]. Saatavissa: s.htm?id=60ff85813c3047c2bf1a c6f0#pg0
36 36 SolidWorks. 2017e. [SolidWorksin www-sivuilla]. [Viitattu ]. Saatavissa: y.htm SolidWorks. 2017f. [SolidWorksin www-sivuilla]. [Viitattu ]. Saatavissa: swassy.htm SolidWorks. 2017g. [SolidWorksin www-sivuilla]. [Viitattu ]. Saatavissa: htm Sunnersjö, S Intelligent Computer Systems in Engineering Design: Principles and Applications. Cham: Springer. s Tuhola, T. & Viitanen, K D-mallintaminen suunnittelun apuvälineenä. 1. painos. Jyväskylä: Gummerus. 175 s.
37 LIITTEET Liite I, 1 Mikrotyöstölinjan toimilaitteet Toimilaite Liikeradan Liikeradan pituus Suunta Liikealueen/liikeradan rajoite Manipulaattori x-suunnassa - X Osuminen päätysuojiin Manipulaattori y-suunnassa 100 mm Y - Manipulaattori z-suunnassa 300 mm Z Osuminen työstöasemaan manipulaattorin liikkuessa x- suunnassa (jos yli 35 mm minimiasemastaan) Manipulaattorin luukku - Osuminen muihin Vastapäivään mikrotyöstölinjan osiin Suojaluukun oltava auki, kun manipulaattori vie kappaletta Työstöaseman suojaluukku 300 mm Y työstettäväksi (risteävä liikerata manipulaattorin z-suunnan kanssa) Työstöaseman ovi - Osuminen muihin Vastapäivään mikrotyöstölinjan osiin Työstöaseman laserin skannerin korkeussäätö - Y - Latausaseman huoltoluukku - Osuminen muihin Vastapäivään mikrotyöstölinjan osiin Latausaseman lataustaso 604 mm Z -
38 Liite II, 1 Mikrotyöstölinjan osaluettelo Osan nimi Mistä 3D-malli on peräisin? Tarkkuus ja Mallityyppi 40x40 putki 300 mm Aineisto Tarkka umpinainen malli 40x40 putki 320 mm Aineisto Tarkka umpinainen malli 40x40 putki 460 mm Aineisto Tarkka umpinainen malli 40x40 putki 540 mm Aineisto Tarkka umpinainen malli 40x40 putki 548mm Aineisto Tarkka umpinainen malli 40x40 putki 790mm Aineisto Tarkka umpinainen malli 40x40 putki 800 mm Aineisto Tarkka umpinainen malli 40x40 putki 1200 mm Aineisto Tarkka umpinainen malli 40x40 putki 1518 mm Aineisto Tarkka umpinainen malli 40x40 putki 1700 mm Aineisto Tarkka umpinainen malli 40x80 putki 240 mm Aineisto Tarkka umpinainen malli 40x80 putki 320 mm Aineisto Tarkka umpinainen malli 40x80 putki 395 mm Aineisto Tarkka umpinainen malli 40x80 putki 420mm Aineisto Tarkka umpinainen malli 40x80 putki 740mm Aineisto Tarkka umpinainen malli 40x80 putki 875 mm Aineisto Tarkka umpinainen malli 40x80 putki 1620mm Aineisto Tarkka umpinainen malli 40x80 putki 1700mm Aineisto Tarkka umpinainen malli Hammaskisko Aineisto Tarkka umpinainen malli Hammaspyörä Aineisto Tarkka umpinainen malli Johde Aineisto Tarkka umpinainen malli Johdetason tuki 1 Aineisto Tarkka umpinainen malli Johdetason tuki 2 Aineisto Tarkka umpinainen malli Kahva Aineisto Tarkka umpinainen malli Laserin adapteri Aineisto Tarkka umpinainen malli Laserin adapteri 2 Aineisto Tarkka umpinainen malli Laserin adapteri 3 Mallinnettu itse Tarkka umpinainen malli Laserin kiinnitystaso Aineisto Tarkka umpinainen malli Laserin korkeussäätöalusta Valmistajan dokumenttikirjastosta Yksinkertaist. tilavuusmalli Laserin linssi Aineisto Yksinkertaist. tilavuusmalli Laserin skanneri Valmistajan dokumenttikirjastosta Yksinkertaist. tilavuusmalli Latausasema etupelti Mallinnettu itse Tarkka umpinainen malli Latausasema pleksi Aineisto Tarkka umpinainen malli Latausaseman johdetaso Aineisto Tarkka umpinainen malli Latausaseman luukun pelti Mallinnettu itse Tarkka umpinainen malli Lataustason johde Mallinnettu itse Tarkka umpinainen malli Lataustason L-tanko Aineisto Tarkka umpinainen malli Lataustason Slider Mallinnettu itse Yksinkertaist. tilavuusmalli
39 Liite II, 2 Osan nimi Mistä 3D-malli on peräisin? Tarkkuus ja Mallityyppi M6 kiinnike Aineisto Tarkka umpinainen malli M6 mutteri Aineisto Tarkka umpinainen malli M6 pultti Aineisto Tarkka umpinainen malli M8 kiinnike Aineisto Tarkka umpinainen malli M8 pultti Aineisto Tarkka umpinainen malli Manipulaattori y-suunta johde osa 1 Valmistajan dokumenttikirjastosta Yksinkertaist. tilavuusmalli Manipulaattori y-suunta johde osa 2 Valmistajan dokumenttikirjastosta Tarkka umpinainen malli Manipulaattori z-suunta johde osa 1 Valmistajan dokumenttikirjastosta Yksinkertaist. tilavuusmalli Manipulaattori z-suunta johde osa 2 Valmistajan dokumenttikirjastosta Tarkka umpinainen malli Manipulaattori z-suunta kulmapala Aineisto Tarkka umpinainen malli Manipulaattori z-suunta tarttuja Aineisto Tarkka umpinainen malli Manipulaattorin levy 1 Aineisto Tarkka umpinainen malli Manipulaattorin levy 2 Aineisto Tarkka umpinainen malli Manipulaattorin levy 3 Aineisto Tarkka umpinainen malli Manipulaattorin luukku Valmistajan dokumenttikirjastosta Tarkka umpinainen malli Manipulaattorin pohjalevy Aineisto Tarkka umpinainen malli Manipulaattorin rinnakkaissarja Valmistajan dokumenttikirjastosta Yksinkertaist. tilavuusmalli Manipulaattorin slider Mallinnettu itse Yksinkertaist. tilavuusmalli Manipulaattorin x-suunnan moottori Aineisto Yksinkertaist. tilavuusmalli Manipulaattorin x-suunnan vaihde Aineisto Yksinkertaist. tilavuusmalli Manipulaattorin y-suunnan moottori Aineisto Yksinkertaist. tilavuusmalli Moottorinohjain Valmistajan dokumenttikirjastosta Yksinkertaist. tilavuusmalli Palettipöydän levy Aineisto Tarkka umpinainen malli Palettipöydän levy 2 Aineisto Tarkka umpinainen malli Palettipöydän tappi Aineisto Tarkka umpinainen malli Pitkä sivupelti Mallinnettu itse Tarkka umpinainen malli Pleksilista 1118 mm Mallinnettu itse Tarkka umpinainen malli Pleksilista 1618 mm Mallinnettu itse Tarkka umpinainen malli Pleksilista 300 mm Mallinnettu itse Tarkka umpinainen malli Pleksilista 460 mm Mallinnettu itse Tarkka umpinainen malli Pleksilista 499 mm Mallinnettu itse Tarkka umpinainen malli Pleksilista 800 mm Mallinnettu itse Tarkka umpinainen malli Päätysuojan pleksi Aineisto Tarkka umpinainen malli Runkokiinnike osa 1 Mallinnettu itse Tarkka umpinainen malli Runkokiinnike osa 2 Mallinnettu itse Yksinkertaist. tilavuusmalli Sarana Aineisto Tarkka umpinainen malli Saranan tappi Aineisto Tarkka umpinainen malli Sivupelti Mallinnettu itse Tarkka umpinainen malli Sähkökaapin lukko Valmistajan dokumenttikirjastosta Tarkka umpinainen malli
40 Liite II, 3 Osan nimi Mistä 3D-malli on peräisin? Tarkkuus ja Mallityyppi Sähkökaapin pohjalevy Valmistajan dokumenttikirjastosta Tarkka umpinainen malli Sähkökaapin runko Valmistajan dokumenttikirjastosta Tarkka umpinainen malli Sähkökaapin sarana osa 1 Valmistajan dokumenttikirjastosta Tarkka umpinainen malli Sähkökaapin sarana osa 2 Valmistajan dokumenttikirjastosta Tarkka umpinainen malli Sähkökaapin takalevy Valmistajan dokumenttikirjastosta Tarkka umpinainen malli Säätöjalka osa 1 Mallinnettu itse Tarkka umpinainen malli Säätöjalka osa 2 Mallinnettu itse Tarkka umpinainen malli Säätöjalka osa 3 Mallinnettu itse Tarkka umpinainen malli Säätöjalkojen kiinnike Aineisto Tarkka umpinainen malli Tulppa 40x40 Aineisto Tarkka umpinainen malli Tulppa 40x80 Aineisto Tarkka umpinainen malli Työstettävä kappale Aineisto Tarkka umpinainen malli Työstöasema etupelti Mallinnettu itse Tarkka umpinainen malli Työstöasema kattopeli Mallinnettu itse Tarkka umpinainen malli Työstöasema läpivienti Mallinnettu itse Tarkka umpinainen malli Työstöaseman johdetaso Aineisto Tarkka umpinainen malli Työstöaseman luukun moottori Mallinnettu itse Yksinkertaist. tilavuusmalli Työstöaseman luukun moott. akseli Mallinnettu itse Yksinkertaist. tilavuusmalli Työstöaseman oven pleksi Aineisto Tarkka umpinainen malli Työstöaseman suojaluukku Mallinnettu itse Tarkka umpinainen malli Työstöpaletin tappi Aineisto Tarkka umpinainen malli Työstöpaletti Aineisto Tarkka umpinainen malli Työstötaso Aineisto Tarkka umpinainen malli Työstötaso kiinnike 1 Aineisto Tarkka umpinainen malli Työstötaso kiinnike 2 Aineisto Tarkka umpinainen malli

41 Liite III, 1 Mikrotyöstölinjan osakokoonpanot 1. Työstöasema 2. Latausasema

42 Liite III, 2 3. Manipulaattorirunko 4. Työstöaseman ovi


43 Liite III, 3 5. Työstöaseman suojaluukku 6. Päätysuoja


44 Liite III, 4 7. Latausaseman huoltoluukku 8. Latausaseman lataustason johde

45 Liite III, 5 9. Latausaseman lataustaso 10. Manipulaattorin y-suunta

46 Liite III, Manipulaattorin z-suunta 12. Manipulaattorin luukku


47 Liite IV, 1 Mikrotyöstölinjan toimilaitteiden liikeradat 1. Manipulaattorin liikerata x-suunnassa. 2. Manipulaattorin liikerata y-suunnassa.

48 Liite IV, 2 3. Manipulaattorin liikerata z-suunnassa. 4. Manipulaattorin luukun liikerata


49 Liite IV, 3 5. Työstöaseman suojaluukun liikerata 6. Työstöaseman oven liikerata.


50 Liite IV, 4 7. Latausaseman huoltoluukun liikerata. 8. Latausaseman lataustason johteen liikerata.

51 9. Latausaseman lataustason liikerata. Liite IV, 5
Painevalut 3. Teoriatausta Revolved Pattern. Mallinnuksen vaiheet. CAD työkalut harjoituksessa diecasting_3_1.sldprt
 Painevalut 3 Tuula Höök Tampereen teknillinen yliopisto Hae aloituskappale start_diecasting_3_1.sldprt. Tehtävänäsi on suunnitella kansi alueille, jotka on merkitty kuvaan punaisella, vihreällä ja sinisellä
Painevalut 3 Tuula Höök Tampereen teknillinen yliopisto Hae aloituskappale start_diecasting_3_1.sldprt. Tehtävänäsi on suunnitella kansi alueille, jotka on merkitty kuvaan punaisella, vihreällä ja sinisellä
kannet ja kotelot Tuula Höök Tampereen teknillinen yliopisto
 Metallisen kestomuottikappaleen suunnittelua 1, kannet ja kotelot Tuula Höök Tampereen teknillinen yliopisto Hae kokoonpano start_assembly_1_x.sldasm tai sitä vastaava neutraalimuotoinen tiedosto. Tehtävänäsi
Metallisen kestomuottikappaleen suunnittelua 1, kannet ja kotelot Tuula Höök Tampereen teknillinen yliopisto Hae kokoonpano start_assembly_1_x.sldasm tai sitä vastaava neutraalimuotoinen tiedosto. Tehtävänäsi
kannet ja kotelot Tuula Höök Tampereen teknillinen yliopisto
 Metallisen kestomuottikappaleen suunnittelua 1, kannet ja kotelot Tuula Höök Tampereen teknillinen yliopisto Hae kokoonpano start_assembly_1_x.sldasm. Tehtävänäsi on suunnitella kansi alueille, jotka on
Metallisen kestomuottikappaleen suunnittelua 1, kannet ja kotelot Tuula Höök Tampereen teknillinen yliopisto Hae kokoonpano start_assembly_1_x.sldasm. Tehtävänäsi on suunnitella kansi alueille, jotka on
Painevalut 3. Teoriatausta. Mallinnuksen vaiheet. CAD työkalut harjoituksessa diecasting_3_2.sldprt. CAE DS Kappaleensuunnitteluharjoitukset
 Painevalut 3 Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Hae aloituskappale start_diecasting_3_2.sldprt ja mallinna siihen kansi. CAD työkalut harjoituksessa diecasting_3_2.sldprt Kuva 1:
Painevalut 3 Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Hae aloituskappale start_diecasting_3_2.sldprt ja mallinna siihen kansi. CAD työkalut harjoituksessa diecasting_3_2.sldprt Kuva 1:
Pintamallinnus 1: Pursotettuja pintoja
 Tampereen ammattiopisto - CAD perusharjoitukset - Tuula Höök Pintamallinnus 1: Pursotettuja pintoja Harjoitusten yleisohje Tutki mallinnettavan kappaleen mittapiirrosta. Valitse mittapiirroksen alla olevasta
Tampereen ammattiopisto - CAD perusharjoitukset - Tuula Höök Pintamallinnus 1: Pursotettuja pintoja Harjoitusten yleisohje Tutki mallinnettavan kappaleen mittapiirrosta. Valitse mittapiirroksen alla olevasta
Perusteet 5, pintamallinnus
 Perusteet 5, pintamallinnus Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_4.pdf (Sama piirustus kuin harjoituksessa basic_4). Käytä piirustuksessa annettuja mittoja ja
Perusteet 5, pintamallinnus Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_4.pdf (Sama piirustus kuin harjoituksessa basic_4). Käytä piirustuksessa annettuja mittoja ja
Tasainen seinämänpaksuus 1
 Tasainen seinämänpaksuus 1 Tuula Höök Tampereen teknillinen yliopisto Hae aloitusmalli start_univwall_1.sldprt. Avaa malli ja tarkastele sitä seinämänpaksuuden näkökulmasta. Kappale on yksinkertainen suorakulmainen
Tasainen seinämänpaksuus 1 Tuula Höök Tampereen teknillinen yliopisto Hae aloitusmalli start_univwall_1.sldprt. Avaa malli ja tarkastele sitä seinämänpaksuuden näkökulmasta. Kappale on yksinkertainen suorakulmainen
STL:n luonti IronCADillä
 STL:n luonti IronCADillä STL-tiedoston luonti IronCADilla etenee seuraavasti: 1. Avataan haluttu kappale IronCADilla. 2. Kappaletta napsautetaan hiiren oikealla näppäimellä ja valitse pudotusvalikosta
STL:n luonti IronCADillä STL-tiedoston luonti IronCADilla etenee seuraavasti: 1. Avataan haluttu kappale IronCADilla. 2. Kappaletta napsautetaan hiiren oikealla näppäimellä ja valitse pudotusvalikosta
Perusteet 3, tilavuus ja pintamallinnus
 Perusteet 3, tilavuus ja pintamallinnus Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_3_1.pdf, sama piirustus kuin harjoituksessa basic_3_1. Käytä piirustuksessa annettuja mittoja
Perusteet 3, tilavuus ja pintamallinnus Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_3_1.pdf, sama piirustus kuin harjoituksessa basic_3_1. Käytä piirustuksessa annettuja mittoja
Jakopinnat ja liikkuvan keernan pinnat 1, keerna jakopinnan tasalla
 Jakopinnat ja liikkuvan keernan pinnat 1, keerna jakopinnan tasalla Tuula Höök, Tampereen teknillinen yliopisto Teoriatausta Muotin perusrakenne Ruisku tai painevalukappaleen rakenteen perusasiat: päästö,
Jakopinnat ja liikkuvan keernan pinnat 1, keerna jakopinnan tasalla Tuula Höök, Tampereen teknillinen yliopisto Teoriatausta Muotin perusrakenne Ruisku tai painevalukappaleen rakenteen perusasiat: päästö,
Perusteet 3, tilavuus ja pintamallinnus
 Perusteet 3, tilavuus ja pintamallinnus Tuula Höök, Juho Taipale Tampereen Teknillinen Yliopisto Ota piirustus fin_basic_3_1.pdf. Käytä piirustuksessa annettuja mittoja ja tuota niiden pohjalta teknisesti
Perusteet 3, tilavuus ja pintamallinnus Tuula Höök, Juho Taipale Tampereen Teknillinen Yliopisto Ota piirustus fin_basic_3_1.pdf. Käytä piirustuksessa annettuja mittoja ja tuota niiden pohjalta teknisesti
Perusteet 3, tilavuus ja pintamallinnus
 Perusteet 3, tilavuus ja pintamallinnus Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_3_1.pdf. Käytä piirustuksessa annettuja mittoja ja tuota niiden pohjalta teknisesti hyvälaatuinen
Perusteet 3, tilavuus ja pintamallinnus Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_3_1.pdf. Käytä piirustuksessa annettuja mittoja ja tuota niiden pohjalta teknisesti hyvälaatuinen
Ulostyöntimet 1. Teoriatausta. Mallinnuksen vaiheet. CAD työkalut harjoituksessa
 Ulostyöntimet 1 Tuula Höök, Tampereen teknillinen yliopisto Teoriatausta Muotin perusrakenne Muotin standardiosat Ulostyöntimien asettelu Ulostyöntö ja vastapäästöjä muovaavat laitteet CAD työkalut harjoituksessa
Ulostyöntimet 1 Tuula Höök, Tampereen teknillinen yliopisto Teoriatausta Muotin perusrakenne Muotin standardiosat Ulostyöntimien asettelu Ulostyöntö ja vastapäästöjä muovaavat laitteet CAD työkalut harjoituksessa
3D-tulostus ja OpenSCAD. Juha Biström, Mikko Simenius, Joel Tolonen
 3D-tulostus ja OpenSCAD Juha Biström, Mikko Simenius, Joel Tolonen Luennon sisältö Motivaatio 3D-tulostus teknologiana Sähköpajan tulostimet Malli Mallinna itse jollakin CAD-ohjelmalla (esim. OpenSCAD)
3D-tulostus ja OpenSCAD Juha Biström, Mikko Simenius, Joel Tolonen Luennon sisältö Motivaatio 3D-tulostus teknologiana Sähköpajan tulostimet Malli Mallinna itse jollakin CAD-ohjelmalla (esim. OpenSCAD)
Jatkotehtävien opastus: tutoriaalien ja SolidWorks itseopiskelumateriaalin läpikäynti
 SOLIDWORKS PERUSKURSSI KESTO 2 PV SolidWorks Peruskurssi antaa erinomaiset valmiudet tehokkaalle suunnittelulle yrityksessäsi. Kurssilla paneudutaan ohjelman peruskäyttöön ja tärkeimpien toimintojen haltuunottoon.
SOLIDWORKS PERUSKURSSI KESTO 2 PV SolidWorks Peruskurssi antaa erinomaiset valmiudet tehokkaalle suunnittelulle yrityksessäsi. Kurssilla paneudutaan ohjelman peruskäyttöön ja tärkeimpien toimintojen haltuunottoon.
Päästöjen analysointi ja piirteiden korjaaminen 3
 Päästöjen analysointi ja piirteiden korjaaminen 3 Tampere University of Technology Tuula Höök Ota kappale start_repair_3_1.sldprt. Kappale on kupin muotoinen ja siinä on sivulla vastapäästöllinen muoto.
Päästöjen analysointi ja piirteiden korjaaminen 3 Tampere University of Technology Tuula Höök Ota kappale start_repair_3_1.sldprt. Kappale on kupin muotoinen ja siinä on sivulla vastapäästöllinen muoto.
CAD/CAM Software with world class precision and control. What s Uusi
 What s Uusi SURFCAM V5.2 Mitä Uutta Page 1 of 19 Toukokuu 2011 Mitä uutta - SURFCAM V5.2 Sisällysluettelo 1) Uusi - Millturn valikko 3 2) Uusi HSM Z-rouhinta rata 4 3) Uusi - Valintojen multi maskaus 6
What s Uusi SURFCAM V5.2 Mitä Uutta Page 1 of 19 Toukokuu 2011 Mitä uutta - SURFCAM V5.2 Sisällysluettelo 1) Uusi - Millturn valikko 3 2) Uusi HSM Z-rouhinta rata 4 3) Uusi - Valintojen multi maskaus 6
Liikkuva keerna 1. Teoriatausta. Mallinnuksen vaiheet. CAD työkalut harjoituksessa. movingcore_2.sldprt. CAE DS Kappaleensuunnitteluharjoitukset
 Liikkuva keerna 1 Tuula Höök Tampereen teknillinen yliopisto Hae aloituskappale start_movingcore_2.sldprt. Tehtävänä on tunnistaa muodot, joihin tarvitaan liikkuva keerna sekä sen jälkeen erottaa muodot
Liikkuva keerna 1 Tuula Höök Tampereen teknillinen yliopisto Hae aloituskappale start_movingcore_2.sldprt. Tehtävänä on tunnistaa muodot, joihin tarvitaan liikkuva keerna sekä sen jälkeen erottaa muodot
Liikkuva keerna 1. Teoriatausta. Mallinnuksen vaiheet. CAD työkalut harjoituksessa movingcore_1.sldprt. CAE DS Kappaleensuunnitteluharjoitukset
 Liikkuva keerna 1 Tuula Höök Tampereen teknillinen yliopisto Hae aloitusmalli start_movingcore_1.sldprt. Tehtävänä on muokata sivuilla olevat koukut siten, että niihin voi asettaa liikkuvat keernat. Mallinna
Liikkuva keerna 1 Tuula Höök Tampereen teknillinen yliopisto Hae aloitusmalli start_movingcore_1.sldprt. Tehtävänä on muokata sivuilla olevat koukut siten, että niihin voi asettaa liikkuvat keernat. Mallinna
Teoriatausta. Mallinnuksen vaiheet. CAD työkalut harjoituksessa. Ruiskuvalumuotin kanavisto 1
 http://www.valuatlas.net ValuAtlas & CAE DS 2007 Muotinsuunnitteluharjoitukset Ruiskuvalumuotin kanavisto 1 Tuula Höök Tampereen teknillinen yliopisto Teoriatausta Ruiskuvalumuotin kanavistot: kylmäkanavat
http://www.valuatlas.net ValuAtlas & CAE DS 2007 Muotinsuunnitteluharjoitukset Ruiskuvalumuotin kanavisto 1 Tuula Höök Tampereen teknillinen yliopisto Teoriatausta Ruiskuvalumuotin kanavistot: kylmäkanavat
Tampereen ammattiopisto - CAD perusharjoitukset - Tuula Höök. Tilavuusmallinnus 1: Pursotuksia
 Tampereen ammattiopisto - CAD perusharjoitukset - Tuula Höök Tilavuusmallinnus 1: Pursotuksia 1 Tilavuusmallinnus 1 Tilavuusmallinnus 1: Pursotuksia Harjoitusten yleisohje Tutki mallinnettavan kappaleen
Tampereen ammattiopisto - CAD perusharjoitukset - Tuula Höök Tilavuusmallinnus 1: Pursotuksia 1 Tilavuusmallinnus 1 Tilavuusmallinnus 1: Pursotuksia Harjoitusten yleisohje Tutki mallinnettavan kappaleen
1. Kokoonpantavan laitteen, sen osakokoonpanojen ja niiden koneenosien toimintaperiaatteiden hyödyntäminen
 TkT Harri Eskelinen 1. Kokoonpantavan laitteen, sen osakokoonpanojen ja niiden koneenosien toimintaperiaatteiden hyödyntäminen 2. Standardiosien hyödyntäminen 3. Osien kokoonpanosuunnat ja järjestys 4.
TkT Harri Eskelinen 1. Kokoonpantavan laitteen, sen osakokoonpanojen ja niiden koneenosien toimintaperiaatteiden hyödyntäminen 2. Standardiosien hyödyntäminen 3. Osien kokoonpanosuunnat ja järjestys 4.
mekaniikka suunnittelu ohjelmisto
 Ver tex Systems Oy on vuonna 1977 perustettu suomalainen tietokoneohjelmistoja valmistava yritys. Kehitämme ja markkinoimme tekniseen suunnitteluun ja tiedonhallintaan tarkoitettuja Vertex-ohjelmistoja.
Ver tex Systems Oy on vuonna 1977 perustettu suomalainen tietokoneohjelmistoja valmistava yritys. Kehitämme ja markkinoimme tekniseen suunnitteluun ja tiedonhallintaan tarkoitettuja Vertex-ohjelmistoja.
Perusteet 5, pintamallinnus
 Perusteet 5, pintamallinnus Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_4.pdf, sama piirustus kuin harjoituksessa basic_4. Käytä piirustuksessa annettuja mittoja ja tuota niiden
Perusteet 5, pintamallinnus Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_4.pdf, sama piirustus kuin harjoituksessa basic_4. Käytä piirustuksessa annettuja mittoja ja tuota niiden
Ulostyöntölaatikko. Teoriatausta. Mallinnuksen vaiheet. CAD työkalut harjoituksessa Ulostyöntölaatikko. CAE DS Muotinsuunnitteluharjoitukset
 Ulostyöntölaatikko Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Teoriatausta Muotin perusrakenne Muotin standardiosat CAD työkalut harjoituksessa Ulostyöntölaatikko Mallinnuksen vaiheet Harjoituksessa
Ulostyöntölaatikko Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Teoriatausta Muotin perusrakenne Muotin standardiosat CAD työkalut harjoituksessa Ulostyöntölaatikko Mallinnuksen vaiheet Harjoituksessa
Teoriatausta. Mallinnuksen vaiheet. CAD työkalut harjoituksessa. Uppokipinätyöstön elektrodi
 Uppokipinätyöstön elektrodi Tuula Höök, Tampereen teknillinen yliopisto Teoriatausta Muotin perusrakenne Uppokipinätyöstö Kipinätyöstön elektrodit Muottipesän valmistettavuus CAD työkalut harjoituksessa
Uppokipinätyöstön elektrodi Tuula Höök, Tampereen teknillinen yliopisto Teoriatausta Muotin perusrakenne Uppokipinätyöstö Kipinätyöstön elektrodit Muottipesän valmistettavuus CAD työkalut harjoituksessa
Konetekniikan koulutusohjelman opintojaksomuutokset
 Konetekniikan koulutusohjelman opintojaksomuutokset 2016-2017 UUDET OPINTOJAKSOT: BK10A3800 Principles of Industrial Manufacturing Processes BK10A3900 Reliability Based Machine Element Design BK10A4000
Konetekniikan koulutusohjelman opintojaksomuutokset 2016-2017 UUDET OPINTOJAKSOT: BK10A3800 Principles of Industrial Manufacturing Processes BK10A3900 Reliability Based Machine Element Design BK10A4000
Teoriatausta. Työvaiheet. CAD työkalut harjoituksessa. CAE DS Muotinsuunnitteluharjoitukset
 Ulostyöntimet 1 Tampereen teknillinen yliopisto Juho Taipale, Tuula Höök Teoriatausta Muotin perusrakenne Muotin standardiosat Ulostyöntimien asettelu Ulostyöntö ja vastapäästöjä muovaavat laitteet CAD
Ulostyöntimet 1 Tampereen teknillinen yliopisto Juho Taipale, Tuula Höök Teoriatausta Muotin perusrakenne Muotin standardiosat Ulostyöntimien asettelu Ulostyöntö ja vastapäästöjä muovaavat laitteet CAD
Liikkuva keerna. Teoriatausta. Mallinnuksen vaiheet. CAD työkalut harjoituksessa Liikkuva keerna
 Liikkuva keerna Tuula Höök Tampereen teknillinen yliopisto Hae aloitusmalli start_movingcore_x.sldprt. Tehtävänäsi on hellittää kappaleen muodot siten, että vastapäästölliset muodot voi valmistaa liikkuvilla
Liikkuva keerna Tuula Höök Tampereen teknillinen yliopisto Hae aloitusmalli start_movingcore_x.sldprt. Tehtävänäsi on hellittää kappaleen muodot siten, että vastapäästölliset muodot voi valmistaa liikkuvilla
Muotin rakenne Ruisku tai painevalukappaleen rakenteen perusasiat: hellitys eli päästö, kulmapyöristys, jakopinta ja vastapäästö.
 Jakopinta 1 Tuula Höök, Tampereen teknillinen yliopisto Esitiedot Muotin rakenne Ruisku tai painevalukappaleen rakenteen perusasiat: hellitys eli päästö, kulmapyöristys, jakopinta ja vastapäästö. Harjoituksessa
Jakopinta 1 Tuula Höök, Tampereen teknillinen yliopisto Esitiedot Muotin rakenne Ruisku tai painevalukappaleen rakenteen perusasiat: hellitys eli päästö, kulmapyöristys, jakopinta ja vastapäästö. Harjoituksessa
Korkki 1 CAD työkalut joka on myös kauniisti muotoiltu harjoituksessa cap_1_2.sldprt Tilavuusmallinnus Pintamallinnus (vapaaehtoinen) Teoriatausta
 Teoriatausta") Korkki 1 Tuula Höök Tampereen teknillinen yliopisto Ota piirustus cap_1_1.pdf. Käytä piirustuksessa annettuja mittoja ja mallinna niiden perusteella teknisesti oikein muotoiltu ruiskuvalukappale, joka
Korkki 1 Tuula Höök Tampereen teknillinen yliopisto Ota piirustus cap_1_1.pdf. Käytä piirustuksessa annettuja mittoja ja mallinna niiden perusteella teknisesti oikein muotoiltu ruiskuvalukappale, joka
Painevalut 1. Teoriatausta Knit. Mallinnuksen vaiheet. CAD työkalut harjoituksessa diecasting_1.sldprt. CAE DS Kappaleensuunnitteluharjoitukset
 Painevalut 1 Tuula Höök Tampereen teknillinen yliopisto Hae piirustus diecasting_1_1.pdf. Käytä piirustuksessa annettuja mittoja ja tuota niiden pohjalta teknisesti hyvälaatuinen ruisku tai painevalukappale,
Painevalut 1 Tuula Höök Tampereen teknillinen yliopisto Hae piirustus diecasting_1_1.pdf. Käytä piirustuksessa annettuja mittoja ja tuota niiden pohjalta teknisesti hyvälaatuinen ruisku tai painevalukappale,
Painevalut 2. Teoriatausta. Mallinnuksen vaiheet Draft Analysis. CAD työkalut harjoituksessa diecasting_2.sldprt
 Painevalut 2 Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Hae aloituskokoonpano start_gearbox.zip ja pura se omalle koneellesi. Voit käyttää myös neutraalitiedostoja. Tehtävänä on suunnitella
Painevalut 2 Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Hae aloituskokoonpano start_gearbox.zip ja pura se omalle koneellesi. Voit käyttää myös neutraalitiedostoja. Tehtävänä on suunnitella
Tampereen ammattiopisto - CAD perusharjoitukset - Tuula Höök. Tilavuusmallinnus 3: Peilaus ja patternointi
 Tampereen ammattiopisto - CAD perusharjoitukset - Tuula Höök Tilavuusmallinnus 3: Peilaus ja patternointi 1 Tilavuusmallinnus 1 Tilavuusmallinnus 3: Peilaus ja patternointi Harjoitusten yleisohje Tutki
Tampereen ammattiopisto - CAD perusharjoitukset - Tuula Höök Tilavuusmallinnus 3: Peilaus ja patternointi 1 Tilavuusmallinnus 1 Tilavuusmallinnus 3: Peilaus ja patternointi Harjoitusten yleisohje Tutki
Perusteet 6, lisää pintamallinnusta
 Perusteet 6, lisää pintamallinnusta Tuula Höök Tampereen teknillinen yliopisto Hae piirustus fin_basic_6_3.pdf. Käytä piirustukseen merkittyjä mittoja ja mallinna kappale pinta ja tilavuusmallinnustyökaluja
Perusteet 6, lisää pintamallinnusta Tuula Höök Tampereen teknillinen yliopisto Hae piirustus fin_basic_6_3.pdf. Käytä piirustukseen merkittyjä mittoja ja mallinna kappale pinta ja tilavuusmallinnustyökaluja
Teoriatausta. Mallinnuksen vaiheet. CAD työkalut harjoituksessa. Ruiskuvalumuotin kanavisto 2
 Ruiskuvalumuotin kanavisto 2 Tuula Höök Tampereen teknillinen yliopisto Teoriatausta Ruiskuvalumuotin kanavistot: kylmäkanavat Ruiskuvalumuotin täyttäminen CAD työkalut harjoituksessa Ruiskuvalumuotin
Ruiskuvalumuotin kanavisto 2 Tuula Höök Tampereen teknillinen yliopisto Teoriatausta Ruiskuvalumuotin kanavistot: kylmäkanavat Ruiskuvalumuotin täyttäminen CAD työkalut harjoituksessa Ruiskuvalumuotin
2016/06/21 13:27 1/10 Laskentatavat
 2016/06/21 13:27 1/10 Laskentatavat Laskentatavat Yleistä - vaakageometrian suunnittelusta Paalu Ensimmäinen paalu Ensimmäisen paalun tartuntapiste asetetaan automaattisesti 0.0:aan. Tämä voidaan muuttaa
2016/06/21 13:27 1/10 Laskentatavat Laskentatavat Yleistä - vaakageometrian suunnittelusta Paalu Ensimmäinen paalu Ensimmäisen paalun tartuntapiste asetetaan automaattisesti 0.0:aan. Tämä voidaan muuttaa
Pintamallintaminen ja maastomallinnus
 1 / 25 Digitaalisen arkkitehtuurin yksikkö Aalto-yliopisto Pintamallintaminen ja maastomallinnus Muistilista uuden ohjelman opetteluun 2 / 25 1. Aloita käyttöliittymään tutustumisesta: Mitä hiiren näppäintä
1 / 25 Digitaalisen arkkitehtuurin yksikkö Aalto-yliopisto Pintamallintaminen ja maastomallinnus Muistilista uuden ohjelman opetteluun 2 / 25 1. Aloita käyttöliittymään tutustumisesta: Mitä hiiren näppäintä
1. Hae zip tiedosto start_sliding_core.zip, tallenna se omalle koneellesi
 Vinotapilla liikutettava luisti Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Teoriatausta Muotin perusrakenne Muotin standardiosat Ulostyöntö ja vastapäästöjä muovaavat laitteet CAD työkalut
Vinotapilla liikutettava luisti Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Teoriatausta Muotin perusrakenne Muotin standardiosat Ulostyöntö ja vastapäästöjä muovaavat laitteet CAD työkalut
ELMAS 4 Laitteiden kriittisyysluokittelu 8.2.2012 1/10. Ramentor Oy ELMAS 4. Laitteiden kriittisyysluokittelu. Versio 1.0
 1/10 Ramentor Oy ELMAS 4 Laitteiden kriittisyysluokittelu Versio 1.0 2/10 SISÄLTÖ 1 Kuvaus... 3 2 Kriittisyysluokittelu ELMAS-ohjelmistolla... 4 2.1 Kohteen mallinnus... 4 2.2 Kriittisyystekijöiden painoarvojen
1/10 Ramentor Oy ELMAS 4 Laitteiden kriittisyysluokittelu Versio 1.0 2/10 SISÄLTÖ 1 Kuvaus... 3 2 Kriittisyysluokittelu ELMAS-ohjelmistolla... 4 2.1 Kohteen mallinnus... 4 2.2 Kriittisyystekijöiden painoarvojen
Perusteet 2, keernallisia kappaleita
 Perusteet 2, keernallisia kappaleita Tuula Höök Tampereen Teknillinen Yliopisto Avaa piirustus fin_sandbasic_2_x.pdf. Käytä piirustuksessa annettuja mittoja ja tuota niiden pohjalta a) kappaleen rakennemalli
Perusteet 2, keernallisia kappaleita Tuula Höök Tampereen Teknillinen Yliopisto Avaa piirustus fin_sandbasic_2_x.pdf. Käytä piirustuksessa annettuja mittoja ja tuota niiden pohjalta a) kappaleen rakennemalli
KRISTO LAMMI SUORAMALLINNUS CAD-JÄRJESTELMISSÄ. Kandidaatintyö
 KRISTO LAMMI SUORAMALLINNUS CAD-JÄRJESTELMISSÄ Kandidaatintyö Tarkastaja: professori Antti Pulkkinen Tarkastaja ja aihe hyväksytty 22. helmikuuta 2017 i TIIVISTELMÄ TAMPEREEN TEKNILLINEN YLIOPISTO Konetekniikan
KRISTO LAMMI SUORAMALLINNUS CAD-JÄRJESTELMISSÄ Kandidaatintyö Tarkastaja: professori Antti Pulkkinen Tarkastaja ja aihe hyväksytty 22. helmikuuta 2017 i TIIVISTELMÄ TAMPEREEN TEKNILLINEN YLIOPISTO Konetekniikan
Built Environment Process Reengineering (PRE)
") RAKENNETTU YMPÄRISTÖ Tarvitaanko tätä palkkia? Built Environment Process Reengineering (PRE) InfraFINBIM PILOTTIPÄIVÄ nro 4, 9.5.2012 Tuotemallinnuksen käyttöönotto Built Environment Process Innovations
RAKENNETTU YMPÄRISTÖ Tarvitaanko tätä palkkia? Built Environment Process Reengineering (PRE) InfraFINBIM PILOTTIPÄIVÄ nro 4, 9.5.2012 Tuotemallinnuksen käyttöönotto Built Environment Process Innovations
Muotin kiinnittäminen
 Muotin kiinnittäminen Tampereen teknillinen yliopisto Tuula Höök Teoriatausta Muotin perusrakenne Muotin standardiosat Kone ja laiteympäristö CAD työkalut harjoituksessa Muotin kiinnittäminen Mallinnuksen
Muotin kiinnittäminen Tampereen teknillinen yliopisto Tuula Höök Teoriatausta Muotin perusrakenne Muotin standardiosat Kone ja laiteympäristö CAD työkalut harjoituksessa Muotin kiinnittäminen Mallinnuksen
Keernojen erottaminen
 Keernojen erottaminen Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Teoriatausta Muotin rakenne Koneistettavuus CAD työkalut harjoituksessa Keernojen erottaminen Mallinnuksen vaiheet Harjoituksessa
Keernojen erottaminen Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Teoriatausta Muotin rakenne Koneistettavuus CAD työkalut harjoituksessa Keernojen erottaminen Mallinnuksen vaiheet Harjoituksessa
Muotin kiinnittäminen
 Muotin kiinnittäminen Tampereen teknillinen yliopisto Tuula Höök Teoriatausta Muotin perusrakenne Muotin standardiosat Kone ja laiteympäristö CAD työkalut harjoituksessa Muotin kiinnittäminen Työvaiheet
Muotin kiinnittäminen Tampereen teknillinen yliopisto Tuula Höök Teoriatausta Muotin perusrakenne Muotin standardiosat Kone ja laiteympäristö CAD työkalut harjoituksessa Muotin kiinnittäminen Työvaiheet
Perusteet 2, pintamallinnus
 Perusteet 2, pintamallinnus Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_1_3.pdf, sama piirustus kuin harjoituksessa basic_1_3. Käytä piirustuksessa annettuja mittoja ja tuota niiden
Perusteet 2, pintamallinnus Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_1_3.pdf, sama piirustus kuin harjoituksessa basic_1_3. Käytä piirustuksessa annettuja mittoja ja tuota niiden
Perusteet 6, lisää pintamallinnusta
 Perusteet 6, lisää pintamallinnusta Tuula Höök Tampereen teknillinen yliopisto Hae piirustus fin_basic_6_2.pdf. Käytä piirustukseen merkittyjä mittoja ja mallinna kappale pinta ja tilavuusmallinnustyökaluja
Perusteet 6, lisää pintamallinnusta Tuula Höök Tampereen teknillinen yliopisto Hae piirustus fin_basic_6_2.pdf. Käytä piirustukseen merkittyjä mittoja ja mallinna kappale pinta ja tilavuusmallinnustyökaluja
Muotin perusrakenne Ruisku tai painevalukappaleen rakenteen perusasiat: päästö, kulmapyöristys, jakopinta ja vastapäästö.
 Jakopinta perusteet JuhoTaipale, Tuula Höök Tampereen teknillinen yliopisto Teoriatausta Muotin perusrakenne Ruisku tai painevalukappaleen rakenteen perusasiat: päästö, kulmapyöristys, jakopinta ja vastapäästö.
Jakopinta perusteet JuhoTaipale, Tuula Höök Tampereen teknillinen yliopisto Teoriatausta Muotin perusrakenne Ruisku tai painevalukappaleen rakenteen perusasiat: päästö, kulmapyöristys, jakopinta ja vastapäästö.
Perusteet 2, pintamallinnus
 Perusteet 2, pintamallinnus Tuula Höök, Juho Taipale Tampereen teknillinen yliopisto Ota sama piirustus kuin harjoituksessa perusteet 1_2, eli fin_basic_1_2.pdf. Käytä piirustuksessa annettuja mittoja
Perusteet 2, pintamallinnus Tuula Höök, Juho Taipale Tampereen teknillinen yliopisto Ota sama piirustus kuin harjoituksessa perusteet 1_2, eli fin_basic_1_2.pdf. Käytä piirustuksessa annettuja mittoja
Perusteet 2, pintamallinnus
 Perusteet 2, pintamallinnus Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_1_2.pdf, sama piirustus kuin harjoituksessa basic_1_2. Käytä piirustuksessa annettuja mittoja ja tuota niiden
Perusteet 2, pintamallinnus Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_1_2.pdf, sama piirustus kuin harjoituksessa basic_1_2. Käytä piirustuksessa annettuja mittoja ja tuota niiden
Perusteet 4, tilavuusmallinnus
 Perusteet 4, tilavuusmallinnus Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_4.pdf. Käytä piirustuksessa annettuja mittoja ja tuota niiden pohjalta teknisesti hyvälaatuinen
Perusteet 4, tilavuusmallinnus Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_4.pdf. Käytä piirustuksessa annettuja mittoja ja tuota niiden pohjalta teknisesti hyvälaatuinen
Perusteet 6, lisää pintamallinnusta
 Perusteet 6, lisää pintamallinnusta Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_6_1.pdf. Käytä piirustuksessa annettuja mittoja ja mallinna kappale pääasiassa pintamallinnustyökaluin.
Perusteet 6, lisää pintamallinnusta Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_6_1.pdf. Käytä piirustuksessa annettuja mittoja ja mallinna kappale pääasiassa pintamallinnustyökaluin.
Jakotaso 1. Teoriatausta. Työvaiheet. CAD työkalut harjoituksessa parting_1_1.catpart. CAE DS Muotinsuunnitteluharjoitukset
 Jakotaso 1 Technical University of Gabrovo JuhoTaipale Tampere University of Technology Tuula Höök Teoriatausta Muotin perusrakenne Jakolinja Päästöt ja vastapäästöt CAD työkalut harjoituksessa parting_1_1.catpart
Jakotaso 1 Technical University of Gabrovo JuhoTaipale Tampere University of Technology Tuula Höök Teoriatausta Muotin perusrakenne Jakolinja Päästöt ja vastapäästöt CAD työkalut harjoituksessa parting_1_1.catpart
Perusteet 2, pintamallinnus
 Perusteet 2, pintamallinnus Tuula Höök, Juho Taipale Tampereen teknillinen yliopisto Ota sama piirustus kuin harjoituksessa perusteet 1_1, fin_basic_1_1.pdf. Käytä piirustuksessa annettuja mittoja ja tuota
Perusteet 2, pintamallinnus Tuula Höök, Juho Taipale Tampereen teknillinen yliopisto Ota sama piirustus kuin harjoituksessa perusteet 1_1, fin_basic_1_1.pdf. Käytä piirustuksessa annettuja mittoja ja tuota
Määrittelydokumentti
 Määrittelydokumentti Aineopintojen harjoitustyö: Tietorakenteet ja algoritmit (alkukesä) Sami Korhonen 014021868 sami.korhonen@helsinki. Tietojenkäsittelytieteen laitos Helsingin yliopisto 23. kesäkuuta
Määrittelydokumentti Aineopintojen harjoitustyö: Tietorakenteet ja algoritmit (alkukesä) Sami Korhonen 014021868 sami.korhonen@helsinki. Tietojenkäsittelytieteen laitos Helsingin yliopisto 23. kesäkuuta
Ensimmäinen osa: Rautalankamallinnus. Rautalankamallinnus
 Ensimmäinen osa: Rautalankamallinnus Rautalankamallinnus Tampereen ammattiopisto - CAD -perusharjoitukset Rautalankamallinnus I: Jana, suorakulmio ja ympyrä Harjoitusten yleisohje Valitse suunnittelutilan
Ensimmäinen osa: Rautalankamallinnus Rautalankamallinnus Tampereen ammattiopisto - CAD -perusharjoitukset Rautalankamallinnus I: Jana, suorakulmio ja ympyrä Harjoitusten yleisohje Valitse suunnittelutilan
Jussi Klemola 3D- KEITTIÖSUUNNITTELUOHJELMAN KÄYTTÖÖNOTTO
 Jussi Klemola 3D- KEITTIÖSUUNNITTELUOHJELMAN KÄYTTÖÖNOTTO Opinnäytetyö KESKI-POHJANMAAN AMMATTIKORKEAKOULU Puutekniikan koulutusohjelma Toukokuu 2009 TIIVISTELMÄ OPINNÄYTETYÖSTÄ Yksikkö Aika Ylivieska
Jussi Klemola 3D- KEITTIÖSUUNNITTELUOHJELMAN KÄYTTÖÖNOTTO Opinnäytetyö KESKI-POHJANMAAN AMMATTIKORKEAKOULU Puutekniikan koulutusohjelma Toukokuu 2009 TIIVISTELMÄ OPINNÄYTETYÖSTÄ Yksikkö Aika Ylivieska
ArchiCad:istä Inventoriin ja NC-jyrsin mallin teko
 ArchiCad:istä Inventoriin ja NC-jyrsin mallin teko Huomattavaa! Kun tallennat archicad:issä Stl tiedoston tarkasta että mallisi on oikeassa mittakaavassa (esim. mikäli ArchiCad malli mallinnettu metrimittakaavassa
ArchiCad:istä Inventoriin ja NC-jyrsin mallin teko Huomattavaa! Kun tallennat archicad:issä Stl tiedoston tarkasta että mallisi on oikeassa mittakaavassa (esim. mikäli ArchiCad malli mallinnettu metrimittakaavassa
Revit Architecture 2013 parametriset. komponentit. opetusmateriaali
 opetusmateriaali Tietoa materiaalista Autodesk Revit Architecture 2013 Käyttäjä Käyttäjä Future CAD Oy Sahaajankatu 28 A 00810 Future Helsinki CAD Oy Puh. Sahaajankatu (09) 478528 400, A faksi (09) 4785
opetusmateriaali Tietoa materiaalista Autodesk Revit Architecture 2013 Käyttäjä Käyttäjä Future CAD Oy Sahaajankatu 28 A 00810 Future Helsinki CAD Oy Puh. Sahaajankatu (09) 478528 400, A faksi (09) 4785
3D-tulostus ja laserleikkaus. Johdatus numeerisen ohjauksen työstökoneisiin ja fyysisten kappaleiden tietokonemallinnukseen
 3D-tulostus ja laserleikkaus Johdatus numeerisen ohjauksen työstökoneisiin ja fyysisten kappaleiden tietokonemallinnukseen Fyysisten kappaleiden mallinnus tietokoneelle Ohjelmia 2D- ja 3D-mallien tekoon
3D-tulostus ja laserleikkaus Johdatus numeerisen ohjauksen työstökoneisiin ja fyysisten kappaleiden tietokonemallinnukseen Fyysisten kappaleiden mallinnus tietokoneelle Ohjelmia 2D- ja 3D-mallien tekoon
Ruiskuvalumuotin kanavisto 1
 Ruiskuvalumuotin kanavisto 1 Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Teoriatausta Ruiskuvalumuotin kanavistot: kylmäkanavat Ruiskuvalumuotin täyttäminen CAD työkalut harjoituksessa Ruiskuvalumuotin
Ruiskuvalumuotin kanavisto 1 Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Teoriatausta Ruiskuvalumuotin kanavistot: kylmäkanavat Ruiskuvalumuotin täyttäminen CAD työkalut harjoituksessa Ruiskuvalumuotin
LASERKEILAUKSEEN PERUSTUVA 3D-TIEDONKERUU MONIPUOLISIA RATKAISUJA KÄYTÄNNÖN TARPEISIIN
 LASERKEILAUKSEEN PERUSTUVA 3D-TIEDONKERUU MONIPUOLISIA RATKAISUJA KÄYTÄNNÖN TARPEISIIN PSK-BIM seminaari 9.5.2014 Jukka Mäkelä, Oy 1 SMARTGEO OY Palvelujen johtoajatuksena on tarkkojen, kattavien ja luotettavien
LASERKEILAUKSEEN PERUSTUVA 3D-TIEDONKERUU MONIPUOLISIA RATKAISUJA KÄYTÄNNÖN TARPEISIIN PSK-BIM seminaari 9.5.2014 Jukka Mäkelä, Oy 1 SMARTGEO OY Palvelujen johtoajatuksena on tarkkojen, kattavien ja luotettavien
Jakopinta monipesäinen muotti
 Jakopinta monipesäinen muotti JuhoTaipale, Tuula Höök Tampereen teknillinen yliopisto Teoriatausta Muotin perusrakenne Ruisku tai painevalukappaleen rakenteen perusasiat: hellitys eli päästö, kulmapyöristys,
Jakopinta monipesäinen muotti JuhoTaipale, Tuula Höök Tampereen teknillinen yliopisto Teoriatausta Muotin perusrakenne Ruisku tai painevalukappaleen rakenteen perusasiat: hellitys eli päästö, kulmapyöristys,
Tampereen ammattiopisto - CAD perusharjoitukset - Tuula Höök. Tilavuusmallinnus 2: Pyörähdyssymmetria
 Tampereen ammattiopisto - CAD perusharjoitukset - Tuula Höök Tilavuusmallinnus 2: Pyörähdyssymmetria 1 Tilavuusmallinnus 1 Tilavuusmallinnus 2: Pyörähdyssymmetria Harjoitusten yleisohje Tutki mallinnettavan
Tampereen ammattiopisto - CAD perusharjoitukset - Tuula Höök Tilavuusmallinnus 2: Pyörähdyssymmetria 1 Tilavuusmallinnus 1 Tilavuusmallinnus 2: Pyörähdyssymmetria Harjoitusten yleisohje Tutki mallinnettavan
JONI KOSKINEN SATELLIITIN RF-TEHONJAKOVERKON MEKANIIKKASUUNNIT- TELU. Diplomityö
 JONI KOSKINEN SATELLIITIN RF-TEHONJAKOVERKON MEKANIIKKASUUNNIT- TELU Diplomityö Tarkastaja: professori Asko Ellman Tarkastaja ja aihe hyväksytty Teknisten tieteiden tiedekuntaneuvoston kokouksessa 8. kesäkuuta
JONI KOSKINEN SATELLIITIN RF-TEHONJAKOVERKON MEKANIIKKASUUNNIT- TELU Diplomityö Tarkastaja: professori Asko Ellman Tarkastaja ja aihe hyväksytty Teknisten tieteiden tiedekuntaneuvoston kokouksessa 8. kesäkuuta
Sonera Viestintäpalvelu VIP VIP Laajennettu raportointi Ohje
 Sonera Viestintäpalvelu VIP VIP Laajennettu raportointi Ohje Sisällysluettelo VIP Laajennettu raportointi... 3 Luo raportti Laajennetun raportoinnin työkaluilla... 4 Avaa Laajennettu raportointi... 4 Valitse
Sonera Viestintäpalvelu VIP VIP Laajennettu raportointi Ohje Sisällysluettelo VIP Laajennettu raportointi... 3 Luo raportti Laajennetun raportoinnin työkaluilla... 4 Avaa Laajennettu raportointi... 4 Valitse
Perusteet 6, lisää pintamallinnusta
 Perusteet 6, lisää pintamallinnusta Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_6_3.pdf. Käytä piirustuksessa annettuja mittoja ja mallinna kappale pääasiassa pintamallinnustyökaluin.
Perusteet 6, lisää pintamallinnusta Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_6_3.pdf. Käytä piirustuksessa annettuja mittoja ja mallinna kappale pääasiassa pintamallinnustyökaluin.
Tilavuusmallinnus 2, pursotuksin ja pursotetuin leikkauspinnoin muotoiltuja kappaleita
 Tilavuusmallinnus 2, pursotuksin ja pursotetuin leikkauspinnoin muotoiltuja kappaleita Tuula Höök Tampereen Teknillinen Yliopisto Ota piirustus solids_2_x.pdf. Käytä piirustuksessa annettuja mittoja ja
Tilavuusmallinnus 2, pursotuksin ja pursotetuin leikkauspinnoin muotoiltuja kappaleita Tuula Höök Tampereen Teknillinen Yliopisto Ota piirustus solids_2_x.pdf. Käytä piirustuksessa annettuja mittoja ja
Jukka Impola KARHUNTASSU-PUMPPUKUORMAIMEN 3D- MALLINTAMINEN JA SUUNNITTELU SOLID WORKS- OHJELMAN AVULLA
 Jukka Impola KARHUNTASSU-PUMPPUKUORMAIMEN 3D- MALLINTAMINEN JA SUUNNITTELU SOLID WORKS- OHJELMAN AVULLA Opinnäytetyö KESKI-POHJANMAAN AMMATTIKORKEAKOULU Kone- ja tuotantotekniikan koulutusohjelma Toukokuu
Jukka Impola KARHUNTASSU-PUMPPUKUORMAIMEN 3D- MALLINTAMINEN JA SUUNNITTELU SOLID WORKS- OHJELMAN AVULLA Opinnäytetyö KESKI-POHJANMAAN AMMATTIKORKEAKOULU Kone- ja tuotantotekniikan koulutusohjelma Toukokuu
Liikkuva keerna. Teoriatausta. Mallinnuksen vaiheet. CAD työkalut harjoituksessa
 Liikkuva keerna Tuula Höök Tampereen teknillinen yliopisto Hae aloitusmalli start_movingcore_x.catpart. Tehtävänä on muokata kappaleen muodot siten, että vastapäästölliset muodot voi valmistaa liikkuvilla
Liikkuva keerna Tuula Höök Tampereen teknillinen yliopisto Hae aloitusmalli start_movingcore_x.catpart. Tehtävänä on muokata kappaleen muodot siten, että vastapäästölliset muodot voi valmistaa liikkuvilla
Kon Simuloinnin Rakentaminen Janne Ojala
 Kon 16.4011 Simuloinnin Rakentaminen Janne Ojala Simulointi käytännössä 1/3 Simulaatiomalleja helppo analysoida Ymmärretään ongelmaa paremmin - Opitaan ymmärtämään koneen toimintaa ja siihen vaikuttavia
Kon 16.4011 Simuloinnin Rakentaminen Janne Ojala Simulointi käytännössä 1/3 Simulaatiomalleja helppo analysoida Ymmärretään ongelmaa paremmin - Opitaan ymmärtämään koneen toimintaa ja siihen vaikuttavia
AutoCAD-natiiviobjektin toteutus
 AutoCAD-natiiviobjektin toteutus Kontiotuote OY Maailman toiseksi suurin hirsitalotoimittaja Aloittanut toimintansa 70-luvulla Liikevaihto vuonna 2003-37,355 Milj. euroa josta vientiä 7,376 Milj. euroa
AutoCAD-natiiviobjektin toteutus Kontiotuote OY Maailman toiseksi suurin hirsitalotoimittaja Aloittanut toimintansa 70-luvulla Liikevaihto vuonna 2003-37,355 Milj. euroa josta vientiä 7,376 Milj. euroa
Malleja ja menetelmiä geometriseen tietokonenäköön
 Malleja ja menetelmiä geometriseen tietokonenäköön Juho Kannala 7.5.2010 Johdanto Tietokonenäkö on ala, joka kehittää menetelmiä automaattiseen kuvien sisällön tulkintaan Tietokonenäkö on ajankohtainen
Malleja ja menetelmiä geometriseen tietokonenäköön Juho Kannala 7.5.2010 Johdanto Tietokonenäkö on ala, joka kehittää menetelmiä automaattiseen kuvien sisällön tulkintaan Tietokonenäkö on ajankohtainen
Teoriatausta. Mallinnuksen vaiheet. CAD työkalut harjoituksessa Vinotapilla liikutettava
 Vinotapilla liikutettava luisti Tuula Höök, Tampereen teknillinen yliopisto Teoriatausta Muotin perusrakenne Muotin standardiosat Ulostyöntö ja vastapäästöjä muovaavat laitteet CAD työkalut harjoituksessa
Vinotapilla liikutettava luisti Tuula Höök, Tampereen teknillinen yliopisto Teoriatausta Muotin perusrakenne Muotin standardiosat Ulostyöntö ja vastapäästöjä muovaavat laitteet CAD työkalut harjoituksessa
Simulation and modeling for quality and reliability (valmiin työn esittely) Aleksi Seppänen
 Aleksi Seppänen") Simulation and modeling for quality and reliability (valmiin työn esittely) Aleksi Seppänen 16.06.2014 Ohjaaja: Urho Honkanen Valvoja: Prof. Harri Ehtamo Työn saa tallentaa ja julkistaa Aalto-yliopiston
Simulation and modeling for quality and reliability (valmiin työn esittely) Aleksi Seppänen 16.06.2014 Ohjaaja: Urho Honkanen Valvoja: Prof. Harri Ehtamo Työn saa tallentaa ja julkistaa Aalto-yliopiston
Suunnittelutyökalu kustannusten ja päästöjen laskentaan
 Suunnittelutyökalu kustannusten ja päästöjen laskentaan TERÄSRAKENTAMISEN T&K-PÄIVÄT 28.-29.5.2013 Mauri Laasonen Tampereen teknillinen yliopisto Tietomallin hyödyntäminen Mallissa on valmiina runsaasti
Suunnittelutyökalu kustannusten ja päästöjen laskentaan TERÄSRAKENTAMISEN T&K-PÄIVÄT 28.-29.5.2013 Mauri Laasonen Tampereen teknillinen yliopisto Tietomallin hyödyntäminen Mallissa on valmiina runsaasti
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää
 Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
1. Hae zip tiedosto start_sliding_core.zip, tallenna se omalle koneellesi
 Vinotapilla liikutettava luisti Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Teoriatausta Muotin perusrakenne Muotin standardiosat Ulostyöntö ja vastapäästöjä muovaavat laitteet CAD työkalut
Vinotapilla liikutettava luisti Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Teoriatausta Muotin perusrakenne Muotin standardiosat Ulostyöntö ja vastapäästöjä muovaavat laitteet CAD työkalut
Kaavioiden rakenne. Kaavioiden piirto symboleita yhdistelemällä. Kaavion osan valitseminen päätöksellä ja toistaminen silmukalla.
 2. Vuokaaviot 2.1 Sisällys Kaavioiden rakenne. Kaavioiden piirto symbolta yhdistelemällä. Kaavion osan valitseminen päätöksellä ja toistaminen silmukalla. Esimerkkejä: algoritmi oven avaamiseen vuokaaviona,
2. Vuokaaviot 2.1 Sisällys Kaavioiden rakenne. Kaavioiden piirto symbolta yhdistelemällä. Kaavion osan valitseminen päätöksellä ja toistaminen silmukalla. Esimerkkejä: algoritmi oven avaamiseen vuokaaviona,
Perusteet 6, lisää pintamallinnusta
 Perusteet 6, lisää pintamallinnusta Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_6_2.pdf. Käytä piirustuksessa annettuja mittoja ja mallinna kappale pääosin pintamallinnustyökaluja
Perusteet 6, lisää pintamallinnusta Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Ota piirustus fin_basic_6_2.pdf. Käytä piirustuksessa annettuja mittoja ja mallinna kappale pääosin pintamallinnustyökaluja
Keernojen erottaminen
 Keernojen erottaminen Tuula Höök, Tampereen teknillinen yliopisto Teoriatausta Muotin rakenne Koneistettavuus CAD työkalut harjoituksessa Keernojen erottaminen Mallinnuksen vaiheet Avaa jokin harjoitukseen
Keernojen erottaminen Tuula Höök, Tampereen teknillinen yliopisto Teoriatausta Muotin rakenne Koneistettavuus CAD työkalut harjoituksessa Keernojen erottaminen Mallinnuksen vaiheet Avaa jokin harjoitukseen
Joonas Haapala Ohjaaja: DI Heikki Puustinen Valvoja: Prof. Kai Virtanen
 Hävittäjälentokoneen reitin suunnittelussa käytettävän dynaamisen ja monitavoitteisen verkko-optimointitehtävän ratkaiseminen A*-algoritmilla (valmiin työn esittely) Joonas Haapala 8.6.2015 Ohjaaja: DI
Hävittäjälentokoneen reitin suunnittelussa käytettävän dynaamisen ja monitavoitteisen verkko-optimointitehtävän ratkaiseminen A*-algoritmilla (valmiin työn esittely) Joonas Haapala 8.6.2015 Ohjaaja: DI
Mikko Valo TAIVUTUSKONEEN MODERNISOINTI
 Mikko Valo TAIVUTUSKONEEN MODERNISOINTI Kone- ja tuotantotekniikan koulutusohjelma 2019 TAIVUTUSKONEEN MODERNISOINTI Valo, Mikko Satakunnan ammattikorkeakoulu Kone- ja tuotantotekniikan koulutusohjelma
Mikko Valo TAIVUTUSKONEEN MODERNISOINTI Kone- ja tuotantotekniikan koulutusohjelma 2019 TAIVUTUSKONEEN MODERNISOINTI Valo, Mikko Satakunnan ammattikorkeakoulu Kone- ja tuotantotekniikan koulutusohjelma
Microstation 3D laitesuunnittelu 2014
 Microstation 3D laitesuunnittelu 2014 Uusi tiedosto Element Templates Graphic Groups Piirustus, Project Explorer Piirustuksen kuvannot Piirustusarkki 5/16/2014 1 Uusi tiedosto Siementiedostona voi käyttää
Microstation 3D laitesuunnittelu 2014 Uusi tiedosto Element Templates Graphic Groups Piirustus, Project Explorer Piirustuksen kuvannot Piirustusarkki 5/16/2014 1 Uusi tiedosto Siementiedostona voi käyttää
Tieto- ja viestintätekniikka. Internetistä toimiva työväline 1,5 osp (YV10TV2) (HUOM! Ei datanomeille)
 (HUOM! Ei datanomeille)") Kuvaukset 1 (5) Tieto- ja viestintätekniikka Internetistä toimiva työväline 1,5 osp (YV10TV2) (HUOM! Ei datanomeille) Tavoitteet omaksuu verkko-oppimisympäristön ja sähköpostin keskeiset toiminnot tutustuu
Kuvaukset 1 (5) Tieto- ja viestintätekniikka Internetistä toimiva työväline 1,5 osp (YV10TV2) (HUOM! Ei datanomeille) Tavoitteet omaksuu verkko-oppimisympäristön ja sähköpostin keskeiset toiminnot tutustuu
S09 04 Kohteiden tunnistaminen 3D datasta
 AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
Mitä Uutta - SURFCAM V5.1 Sisällysluettelo
 VER CAD/CAM Software with world class precision and control... Mitä uutta Mitä Uutta - SURFCAM V5.1 Sisällysluettelo 1) Parannettu muistinhallinta 32 ja 64 bitin järjestelmissä 3 2) Konesimulointi Optio
VER CAD/CAM Software with world class precision and control... Mitä uutta Mitä Uutta - SURFCAM V5.1 Sisällysluettelo 1) Parannettu muistinhallinta 32 ja 64 bitin järjestelmissä 3 2) Konesimulointi Optio
Projektisuunnitelma. Projektin tavoitteet
 Projektisuunnitelma Projektin tavoitteet Projektin tarkoituksena on tunnistaa erilaisia esineitä Kinect-kameran avulla. Kinect-kamera on kytkettynä tietokoneeseen, johon projektissa tehdään tunnistuksen
Projektisuunnitelma Projektin tavoitteet Projektin tarkoituksena on tunnistaa erilaisia esineitä Kinect-kameran avulla. Kinect-kamera on kytkettynä tietokoneeseen, johon projektissa tehdään tunnistuksen
7 tapaa mallintaa maasto korkeuskäyristä ja metodien yhdistäminen
 1 / 11 Digitaalisen arkkitehtuurin yksikkö Aalto-yliopisto 7 tapaa mallintaa maasto korkeuskäyristä ja metodien yhdistäminen Kertauslista yleisimmistä komennoista 2 / 11 Kuvan tuominen: PictureFrame Siirtäminen:
1 / 11 Digitaalisen arkkitehtuurin yksikkö Aalto-yliopisto 7 tapaa mallintaa maasto korkeuskäyristä ja metodien yhdistäminen Kertauslista yleisimmistä komennoista 2 / 11 Kuvan tuominen: PictureFrame Siirtäminen:
Tulevaisuuden teräsrakenteet ja vaativa valmistus. 3D-skannaus ja käänteinen suunnittelu
 Tulevaisuuden teräsrakenteet ja vaativa valmistus Hämeenlinnassa 24. - 25.1.2018 3D-skannaus ja käänteinen suunnittelu Timo Kärppä, HAMK Ohutlevykeskus 2018 2 SISÄLTÖ 1. Digitaalisuus mahdollistaa monia
Tulevaisuuden teräsrakenteet ja vaativa valmistus Hämeenlinnassa 24. - 25.1.2018 3D-skannaus ja käänteinen suunnittelu Timo Kärppä, HAMK Ohutlevykeskus 2018 2 SISÄLTÖ 1. Digitaalisuus mahdollistaa monia
Febdok 6.0, Uudet ominaisuudet OHJEISTUS
 Febdok 6.0, Uudet ominaisuudet OHJEISTUS Sisällys 1 YLEISTÄ 1 2 ESIMERKIT 2 2.1 LAITTEISTON TIEDOT 2 2.2 SYÖTÖN VALINTA 3 2.3 PJ-LIITTYMÄ 4 2.4 SJ-LIITTYMÄ 5 2.5 GENERAATTORIJAKELU 8 2.6 SUOJALAITTEET
Febdok 6.0, Uudet ominaisuudet OHJEISTUS Sisällys 1 YLEISTÄ 1 2 ESIMERKIT 2 2.1 LAITTEISTON TIEDOT 2 2.2 SYÖTÖN VALINTA 3 2.3 PJ-LIITTYMÄ 4 2.4 SJ-LIITTYMÄ 5 2.5 GENERAATTORIJAKELU 8 2.6 SUOJALAITTEET
Artec TDSM 3D Skanneri 3D mallit ja animaatiot nopeasti, myös liikkuvasta kohteesta
 Artec TDSM 3D Skanneri 3D mallit ja animaatiot nopeasti, myös liikkuvasta kohteesta Miksi ostaa? 1. Aito on-line skannaus, jopa 15 kuva/s (frames/second) 2. Ei tarvetta referenssitarroille tai muille paikoitus
Artec TDSM 3D Skanneri 3D mallit ja animaatiot nopeasti, myös liikkuvasta kohteesta Miksi ostaa? 1. Aito on-line skannaus, jopa 15 kuva/s (frames/second) 2. Ei tarvetta referenssitarroille tai muille paikoitus
Väitöskirjan kirjoittaminen ja viimeistely
 1 Väitöskirjan kirjoittaminen ja viimeistely Pekka Kohti tohtorin tutkintoa 19.4.2017 UniOGS 2 Ensimmäinen versio väitöskirjasta Käytä Acta -kirjoituspohjaa Aloita väitöskirjan / yhteenvedon tekeminen
1 Väitöskirjan kirjoittaminen ja viimeistely Pekka Kohti tohtorin tutkintoa 19.4.2017 UniOGS 2 Ensimmäinen versio väitöskirjasta Käytä Acta -kirjoituspohjaa Aloita väitöskirjan / yhteenvedon tekeminen
Menetelmäraportti - Konfiguraationhallinta
 Menetelmäraportti - Konfiguraationhallinta Päiväys Tekijä 22.03.02 Ville Vaittinen Sisällysluettelo 1. Johdanto... 3 1.1 Tärkeimmät lyhenteet... 3 2. Konfiguraationhallinnan tärkeimmät välineet... 4 2.1
Menetelmäraportti - Konfiguraationhallinta Päiväys Tekijä 22.03.02 Ville Vaittinen Sisällysluettelo 1. Johdanto... 3 1.1 Tärkeimmät lyhenteet... 3 2. Konfiguraationhallinnan tärkeimmät välineet... 4 2.1
RAIN RAKENTAMISEN INTEGRAATIOKYVYKKYYS
 RAIN RAKENTAMISEN INTEGRAATIOKYVYKKYYS Loppuseminaari 11.12.2018 YIT:n pääkonttori, Helsinki RAIN hankkeen loppuseminaari 11.12.2018 Käyttäjälähtöinen tiedonhallinta (WP 4) Professori Harri Haapasalo OY
RAIN RAKENTAMISEN INTEGRAATIOKYVYKKYYS Loppuseminaari 11.12.2018 YIT:n pääkonttori, Helsinki RAIN hankkeen loppuseminaari 11.12.2018 Käyttäjälähtöinen tiedonhallinta (WP 4) Professori Harri Haapasalo OY
Vektorien pistetulo on aina reaaliluku. Esimerkiksi vektorien v = (3, 2, 0) ja w = (1, 2, 3) pistetulo on
 ja w = (1, 2, 3) pistetulo on") 13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
13 Pistetulo Avaruuksissa R 2 ja R 3 on totuttu puhumaan vektorien pituuksista ja vektoreiden välisistä kulmista. Kuten tavallista, näiden käsitteiden yleistäminen korkeampiulotteisiin avaruuksiin ei onnistu
Kuva 2. Lankasahauksen periaate.
 Lankasahaus Tampereen teknillinen yliopisto Tuula Höök Lankasahaus perustuu samaan periaatteeseen kuin uppokipinätyöstökin. Kaikissa kipinätyöstömenetelmissä työstötapahtuman peruselementit ovat kipinätyöstöneste,
Lankasahaus Tampereen teknillinen yliopisto Tuula Höök Lankasahaus perustuu samaan periaatteeseen kuin uppokipinätyöstökin. Kaikissa kipinätyöstömenetelmissä työstötapahtuman peruselementit ovat kipinätyöstöneste,
NC-koneet ja niiden ohjelmointi
 NC-koneet ja niiden ohjelmointi Koordinaattisysteemit Inkrementaalinen Absoluuttinen NC-koneen koordinaatisto Akselien suunnat on määritelty ns. "oikean käden säännön" mukaan (DIN 66217). Koneen edessä
NC-koneet ja niiden ohjelmointi Koordinaattisysteemit Inkrementaalinen Absoluuttinen NC-koneen koordinaatisto Akselien suunnat on määritelty ns. "oikean käden säännön" mukaan (DIN 66217). Koneen edessä