Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT
|
|
|
- Taisto Keskinen
- 6 vuotta sitten
- Katselukertoja:
Transkriptio


1 Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT Laura Ruotsalainen Paikkatietokeskus FGI, MML Matinen rahoitus: tutkimusvuosi

2 INTACT tarve Taistelijan tilannetietoisuus rakennetuissa ympäristöissä, erityisesti sisätiloissa Kartta tuntemattomasta alueesta Tarkka paikka- ja navigointitieto Liike- ja kontekstitietoisuus Paikka usein ennalta tuntematon, paikannuksessa ei voida tukeutua olemassa olevaan infrastruktuuriin


 Vain")
3 INTACT päämäärä Tarkka sisätilapaikannus Kartta tuntemattomasta alueesta => Simultaneous Localization and Mapping (SLAM) Kontekstintunnistus (juoksee, ryömii, makaa) Vain taistelijan varusteissa olevilla laitteilla

, suuria mittausvirheitä Yhden")

4 INTACT haasteet Toteutetaan taistelijan varusteisiin kiinnitettävillä laitteilla Koko, hinta MEMS (micro-electro-mechanical sensors), suuria mittausvirheitä Yhden kameran käytön aiheuttama mittakaavaongelma Monimutkaiset kontekstit, esim. ryömiminen Absoluuttinen sijainti

5 INTACT ratkaisu Useamman sensorin mittausten integrointi 3 IMU:a (Inertial Measurement Unit) barometri Etäisyysmittaukset (ultraääni ) Innovatiiviset algoritmit SLAM-tekniikkaan Innovatiiviset algoritmit kontekstin ratkaisemiseen Digitaalinen TV absoluuttisen sijainnin ratkaisemiseen MIMU22BT Projektin sovellusympäristöksi on valittu sisätila, sillä se on haastava tilannetietoisuuden muodostamiseen. Kaikki kehitetyt menetelmät toimivat kuitenkin myös ulkona kaupunkiympäristössä.

6 Käytettävät sensorit XSENS: IMU + Barometer GoPro Camera Osmium MIMU22BT IMU HRUSB-MaxSonar Osmium MIMU22BT IMU
7 Inertiasensorit jalassa Paras paikannustarkkuus Askeltunnistuksen tarkoitus on havaita, milloin jalka on paikallaan => nopeusvirheen kasvu voidaan katkaista Ongelmia kuitenkin mm. nopean liikkeen aiheuttaman g-dependent bias virheen takia Muiden inertiasensoreiden mittaukset isojen mittausvirheiden korjaukseen ja kontekstintunnistukseen Generalized Likelihood Ratio Angular Rate Energy



8 Visuaalisensorit navigoinnissa Inertiasensoreiden virheiden korjaus SLAM yhdellä kameralla Visuaalinen gyroskooppi Visuaalinen odometri (Ruotsalainen, Vision-Aided Pedestrian Navigation for Challenging GNSS Environments, Doctoral Dissertation, 2013, TUT)


) Ympäristön")



9 SLAM algoritmin kehitys Kameran 6-dof asennon laskenta (Perspective-n-Point (PnP)) Ympäristön pisteitä karkean kartan muodostamiseen sekä paikan laskentaan Kameran kiertyminen Kuvapisteiden vastaavuus Triangulaatio 3D pisteet Kameran 6-dof asento
 0 ö ø kr g")
 1 0-1 20 40 60 80 100 120 140 160")
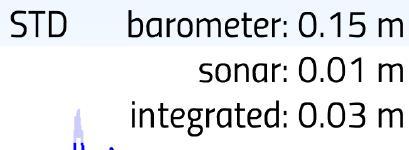
10 Korkeustieto barometrilla Korkeus mitatun paineen avulla Tarkkuus hyvä, kun ollaan samassa tilassa, eikä lämpötilan tai paineen muutoksia Jo ikkunan avaaminen aiheuttaa suuren virheen T h= k æ ç ç æ 1-ç ç ç è è p( h p 0 ) 0 ö ø kr g ö ø x 10 5 Measurements of Pressure from Barometer air pressure (Pa) samples Relative Height 2 height (m) samples

11 Korkeustieto ultraäänen avulla Mittauksista voidaan erottaa portaat, jos se saadaan luotettavaksi ja portaan korkeus voidaan määrittää => korkeus

 3 2.5 2 1.5 1 0.")
12 Virheiden mallinnus Eri sensorien mittausvirheet on tunnettava, jotta fuusiointi onnistuu Virheiden tilastollisten jakaumien mallintaminen Laaja datankeruu, 5 mittauskierrosta maalis- ja huhtikuussa 5 Height 5 Height height(m) height(m) time (s) time (s)
13 Mallinnus: inertiasensori D Paikkaratkaisu The whole testing trajectory (March 17th) Foot IMU SPAN Paikannusvirheiden jakauma Histogram of Pos errors Gaussian PDF fitting Mixture Gaussian PDF Fitting Modeling of postion errors North (m ) 20 Dens ity East (m) pos error (m) Gaussian Fitting mu = sigma = Student-t Fitting mu = sigma = nu = 2.590

14 Fuusiointi- Partikkelifiltteri 1/4 Partikkelifiltteri sopii huomattavasti paremmin fuusiointiin kuin perinteiset Kalman- filtterit Mittaukset eivät ole lineaarisia Virheet eivät noudata Gaussin- jakaumaa Asetetaan 1000 partikkelia, joiden painoarvoa päivitetään mittausten perusteella Todennäköisin paikka on partikkelien painotettu keskiarvo
15 Fuusiointi- Partikkelifiltteri 2/4 Käyttäjän paikkaa (E, N, H), kulkusuuntaa ja sen o muutosta (ψ, ψ) sekä nopeutta (S) mitataan fuusioimalla kaikkien sensorien mittaukset Partikkelifiltterillä Näissä tuloksissa virhemallit ovat vielä Gaussian
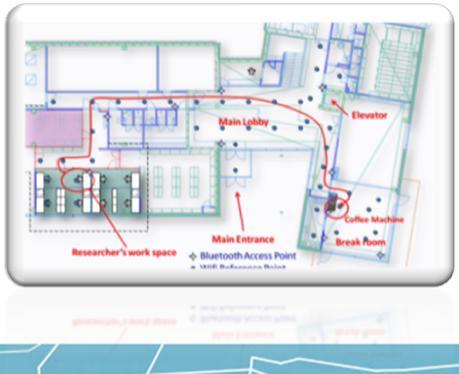
16 Fuusiointi- Partikkelifiltteri 3/4 Fuusioinnin paikannustulos, 2D Reitti 160 m Keskivirhe 3.14 m
17 Fuusiointi- Partikkelifiltteri 4/4
18 Tilannetietoisuus Tilannetietoisuuteen tarvitaan paikan lisäksi tietoa käyttäjän liikkeestä Projektin oleellisena osana fuusioinnin kehittäminen => liiketieto parantaa fuusioinnin tulosta Tietoa käyttäjän tilasta muille Liiketietoa voidaan käyttää myös käyttäjälle näytettävän tiedon mukauttamiseen
19 Liiketietoa sensoreista Paras yhdistelmä sensoreita Parhaat koneoppimisen algoritmit Parhaat tilastolliset muuttujat Liikkeentunnistus käyttäjäriippumattomasti Yhdistetään fuusioalgoritmiin



20 Koneoppiminen Sensors
![Datan keräys Kaksi datajoukkoa (275 / 115 s), eri henkilöt Sisätiloissa, 3 kerrosta Referenssinä videokuvaa Liike Kesto [s]](/docs-images/63/48620563/images/21-1.jpg "Kävely 73 Seisominen 53 Kääntyminen 29 Portaat ylös 26 Portaat alas 21 Juoksu 18 Ryömiminen 16 Kyyköttäminen 13 Muut < 10 s")
21 Datan keräys Kaksi datajoukkoa (275 / 115 s), eri henkilöt Sisätiloissa, 3 kerrosta Referenssinä videokuvaa Liike Kesto [s] Kävely 73 Seisominen 53 Kääntyminen 29 Portaat ylös 26 Portaat alas 21 Juoksu 18 Ryömiminen 16 Kyyköttäminen 13 Muut < 10 s
22 Datan analysointi Liikkeiden tunnistaminen videolta WEKA open-source ohjelmisto Koneoppiminen ja data-mining Nimiöinti Tunnusluvut Matlab Kiihtyvyys, suunnan muutos, etäisyys, paine ja siirtyminen => havainnot datasta Tunnusluvut Luokittelijoiden opetus, Datan luokittelu
23 Tunnuslukujen valinta Feature Mean / Variance Horizontal Acceleration Mean / Variance Vertical Acceleration Mean / Variance of Heading Change Mean / Variance of range Mean / Variance of translation Mean / Variance of pressure 1 st dominant frequency of acceleration Amplitude of 1 st dominant frequency 2 nd dominant frequency of acceleration Amplitude of 2 nd dominant frequency Difference between two dominant frequencies Keskiarvo toistuvat liikkeet Varianssi => staattiset ja dynaamiset liikkeet Dominantit frekvenssit => kävely, juoksu, kaatuminen, hyppiminen Frank et al. (2010) ION GNSS
24 Koneoppimisen algoritmien vertailu Tarkkuus Random Forest KStar NB SMO Muut päätöspuut Laskennan raskaus Decision trees (DT): RandomForest Support Vector Machine (SVM): SMO Naive Bayes (NB) Instance-Based Classifiers: KStar
25 Luokittelun tarkkuus Tunnistettu liike Asc Crawl CroFwd Crouch Desc Run Stand Turn Walk Asc Crawl Todellinen liike CroFwd Crouch Desc Run Stand Turn Walk

26 Analyysi liikkeentunnistuksesta Tarkasteltiin luokittelun onnistumista erilaisilla sensorien ja tunnuslukujen yhdistelmillä Päähän kiinnitetty IMU paransi luokittelua Etenkin ryömimisen ja portaiden laskemisen tunnistamisessa Minkä tahansa sensorin poistaminen huonosi tulosta Varovainen arvio tuloksista: menetelmän tulokset eivät riipu käyttäjästä


27 Intact tulosten hyödyntäminen Menetelmät soveltuvat taistelijoille kaupunkiolosuhteisiin pelastus- ja poliisitoimen tarpeisiin muihin viranomaistehtäviin, joissa on tarve mennä ennalta valmistelemattomiin tiloihin Seuraavat tärkeät tutkimusaiheet Kontekstintunnistuksen yhdistäminen fuusiointiin SLAM:n yhdistäminen fuusiointiin Proof-of-concept luonnollisen kaltaisissa tiloissa ja tilanteissa Toteutuksen tulevaisuudennäkymät Projektin nettisivut:
28 Intact - Julkaisut Julkaistu Ruotsalainen et al. Monocular Visual SLAM for Tactical Situational Awareness, IPIN 2015 Ruotsalainen et al. Multi-sensor SLAM for Tactical Situational Awareness, ION ITM 2016 Ruotsalainen et al. INTACT- Towards infrastructure-free tactical situational awareness, European Journal of Navigation, 2016 Ruotsalainen et al. Situational Awareness for Tactical Applications, ION GNSS 2016 Kaasalainen et al. Combining Indoor Positioning and 3D Point Clouds from Multispectral Lidar, IPIN 2016 Lähetetään Gröhn et al. Omnidirectional monocular 1-Point Ransac Odometer for pedestrian navigation, ION GNSS 2017 student competition




29 INTO 2016 seminar on Indoor Navigation Friday , Hotel Presidentti, Helsinki
Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT
 Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT Laura Ruotsalainen Paikkatietokeskus FGI, MML Matinen rahoitus: 83 912 3. tutkimusvuosi INTACT tarve Taistelijan tilannetietoisuus rakennetuissa
Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT Laura Ruotsalainen Paikkatietokeskus FGI, MML Matinen rahoitus: 83 912 3. tutkimusvuosi INTACT tarve Taistelijan tilannetietoisuus rakennetuissa
Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT
 Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT Laura Ruotsalainen Paikkatietokeskus FGI, MML Matinen rahoitus: 77 531 INTACT tarve Taistelijan tilannetietoisuus rakennetuissa ympäristöissä,
Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT Laura Ruotsalainen Paikkatietokeskus FGI, MML Matinen rahoitus: 77 531 INTACT tarve Taistelijan tilannetietoisuus rakennetuissa ympäristöissä,
SAUMATON PAIKANNUS LAURA RUOTSALAINEN MAANMITTAUSPÄIVÄT
 SAUMATON PAIKANNUS LAURA RUOTSALAINEN MAANMITTAUSPÄIVÄT 22.3.2018 laura.ruotsalainen@nls.fi 1 SAUMATON PAIKANNUS Sijainnin tarkkuus, jatkuvuus, luotettavuus laura.ruotsalainen@nls.fi 2 GSA PAIKANNUKSEN
SAUMATON PAIKANNUS LAURA RUOTSALAINEN MAANMITTAUSPÄIVÄT 22.3.2018 laura.ruotsalainen@nls.fi 1 SAUMATON PAIKANNUS Sijainnin tarkkuus, jatkuvuus, luotettavuus laura.ruotsalainen@nls.fi 2 GSA PAIKANNUKSEN
Monisensoripaikannusta kaikissa ympäristöissä
 Monisensoripaikannusta kaikissa ympäristöissä Ratkaisuja Luonnosta - Lynetin tutkimuspäivä 4.10.2016 Sanna Kaasalainen Laura Ruotsalainen FGI:n Navigoinnin ja paikannuksen osasto Henkilöstö: 18 Tutkimus
Monisensoripaikannusta kaikissa ympäristöissä Ratkaisuja Luonnosta - Lynetin tutkimuspäivä 4.10.2016 Sanna Kaasalainen Laura Ruotsalainen FGI:n Navigoinnin ja paikannuksen osasto Henkilöstö: 18 Tutkimus
Maastokartta pistepilvenä Harri Kaartinen, Maanmittauspäivät
 Maastokartta pistepilvenä 22.3.2018 Harri Kaartinen, Maanmittauspäivät 2018 1 Sisältö Pistepilvi aineistolähteenä Aineiston keruu Aineistojen yhdistäminen ja käsittely Sovellukset 22.3.2018 Harri Kaartinen,
Maastokartta pistepilvenä 22.3.2018 Harri Kaartinen, Maanmittauspäivät 2018 1 Sisältö Pistepilvi aineistolähteenä Aineiston keruu Aineistojen yhdistäminen ja käsittely Sovellukset 22.3.2018 Harri Kaartinen,
Paikka- ja virhe-estimaatin laskenta-algoritmit Paikannusteknologiat nyt ja tulevaisuudessa
 Paikka- ja virhe-estimaatin laskenta-algoritmit 25.8.2011 Paikannusteknologiat nyt ja tulevaisuudessa Simo Ali-Löytty, TTY, matematiikan laitos Mallinnus Pienimmän neliösumman menetelmä Lineaarinen Epälineaarinen
Paikka- ja virhe-estimaatin laskenta-algoritmit 25.8.2011 Paikannusteknologiat nyt ja tulevaisuudessa Simo Ali-Löytty, TTY, matematiikan laitos Mallinnus Pienimmän neliösumman menetelmä Lineaarinen Epälineaarinen
Älyä metsäkoneeseen 3D-laserkeilauksella Heikki Hyyti, Konenäköpäivät, #Reset17
 Älyä metsäkoneeseen 3D-laserkeilauksella Heikki Hyyti, Konenäköpäivät, #Reset17 Älyä metsäkoneeseen 3D-laserkeilauksella Mitä tehdään ja miksi? COMBAT/Pointcloud -hanke Metsäkoneiden kehityksen haasteita
Älyä metsäkoneeseen 3D-laserkeilauksella Heikki Hyyti, Konenäköpäivät, #Reset17 Älyä metsäkoneeseen 3D-laserkeilauksella Mitä tehdään ja miksi? COMBAT/Pointcloud -hanke Metsäkoneiden kehityksen haasteita
Kojemeteorologia. Sami Haapanala syksy 2013. Fysiikan laitos, Ilmakehätieteiden osasto
 Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Mittalaitteiden staattiset ominaisuudet Mittalaitteita kuvaavat tunnusluvut voidaan jakaa kahteen luokkaan Staattisiin
Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Mittalaitteiden staattiset ominaisuudet Mittalaitteita kuvaavat tunnusluvut voidaan jakaa kahteen luokkaan Staattisiin
Kemometriasta. Matti Hotokka Fysikaalisen kemian laitos Åbo Akademi Http://www.abo.fi/~mhotokka
 Kemometriasta Matti Hotokka Fysikaalisen kemian laitos Åbo Akademi Http://www.abo.fi/~mhotokka Mistä puhutaan? Määritelmiä Määritys, rinnakkaismääritys Mittaustuloksen luotettavuus Kalibrointi Mittausten
Kemometriasta Matti Hotokka Fysikaalisen kemian laitos Åbo Akademi Http://www.abo.fi/~mhotokka Mistä puhutaan? Määritelmiä Määritys, rinnakkaismääritys Mittaustuloksen luotettavuus Kalibrointi Mittausten
TUTKIMUSOPAS. SPSS-opas
 TUTKIMUSOPAS SPSS-opas Johdanto Tässä oppaassa esitetään SPSS-tilasto-ohjelman alkeita, kuten Excel-tiedoston avaaminen, tunnuslukujen laskeminen ja uusien muuttujien muodostaminen. Lisäksi esitetään esimerkkien
TUTKIMUSOPAS SPSS-opas Johdanto Tässä oppaassa esitetään SPSS-tilasto-ohjelman alkeita, kuten Excel-tiedoston avaaminen, tunnuslukujen laskeminen ja uusien muuttujien muodostaminen. Lisäksi esitetään esimerkkien
FINNREF- TUKIASEMAVERKKO/PAIKANNUS- PALVELU JA SEN KEHITTÄMINEN
 FINNREF- TUKIASEMAVERKKO/PAIKANNUS- PALVELU JA SEN KEHITTÄMINEN 22.3.2018 Maanmittauspäivät 2018 Marko Ollikainen 1 Esityksen sisältö: - Taustaa - Nyt - Tulevaisuutta FINNREF TUKIASEMAVERKKO JA PAIKANNUSPALVELU
FINNREF- TUKIASEMAVERKKO/PAIKANNUS- PALVELU JA SEN KEHITTÄMINEN 22.3.2018 Maanmittauspäivät 2018 Marko Ollikainen 1 Esityksen sisältö: - Taustaa - Nyt - Tulevaisuutta FINNREF TUKIASEMAVERKKO JA PAIKANNUSPALVELU
TEEMU ROOS (KALVOT MUOKATTU PATRIK HOYERIN LUENTOMATERIAALISTA)
") JOHDATUS TEKOÄLYYN TEEMU ROOS (KALVOT MUOKATTU PATRIK HOYERIN LUENTOMATERIAALISTA) KONEOPPIMISEN LAJIT OHJATTU OPPIMINEN: - ESIMERKIT OVAT PAREJA (X, Y), TAVOITTEENA ON OPPIA ENNUSTAMAAN Y ANNETTUNA X.
JOHDATUS TEKOÄLYYN TEEMU ROOS (KALVOT MUOKATTU PATRIK HOYERIN LUENTOMATERIAALISTA) KONEOPPIMISEN LAJIT OHJATTU OPPIMINEN: - ESIMERKIT OVAT PAREJA (X, Y), TAVOITTEENA ON OPPIA ENNUSTAMAAN Y ANNETTUNA X.
S09 04 Kohteiden tunnistaminen 3D datasta
 AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
SPSS-pikaohje. Jukka Jauhiainen OAMK / Tekniikan yksikkö
 SPSS-pikaohje Jukka Jauhiainen OAMK / Tekniikan yksikkö SPSS on ohjelmisto tilastollisten aineistojen analysointiin. Hyvinvointiteknologian ATK-luokassa on asennettuna SPSS versio 13.. Huom! Ainakin joissakin
SPSS-pikaohje Jukka Jauhiainen OAMK / Tekniikan yksikkö SPSS on ohjelmisto tilastollisten aineistojen analysointiin. Hyvinvointiteknologian ATK-luokassa on asennettuna SPSS versio 13.. Huom! Ainakin joissakin
Pintasääasemaverkon vikadiagnostiikkaa DADAssa
 TEKNILLINEN KORKEAKOULU Systeemitekniikan laboratorio Pintasääasemaverkon vikadiagnostiikkaa DADAssa Vesa Hasu DADA? 2 Pintasääasemaverkon vikadiagnostiikkaa... Yleistä - DADA DADA: Datafuusio- ja diagnostiikkamenetelmien
TEKNILLINEN KORKEAKOULU Systeemitekniikan laboratorio Pintasääasemaverkon vikadiagnostiikkaa DADAssa Vesa Hasu DADA? 2 Pintasääasemaverkon vikadiagnostiikkaa... Yleistä - DADA DADA: Datafuusio- ja diagnostiikkamenetelmien
MONISTE 2 Kirjoittanut Elina Katainen
 MONISTE 2 Kirjoittanut Elina Katainen TILASTOLLISTEN MUUTTUJIEN TYYPIT 1 Mitta-asteikot Tilastolliset muuttujat voidaan jakaa kahteen päätyyppiin: kategorisiin ja numeerisiin muuttujiin. Tämän lisäksi
MONISTE 2 Kirjoittanut Elina Katainen TILASTOLLISTEN MUUTTUJIEN TYYPIT 1 Mitta-asteikot Tilastolliset muuttujat voidaan jakaa kahteen päätyyppiin: kategorisiin ja numeerisiin muuttujiin. Tämän lisäksi
Tulevaisuuden autonomiset laivat. Mika Hyvönen Yliopistotutkija, TkT
 Tulevaisuuden autonomiset laivat Mika Hyvönen Yliopistotutkija, TkT Mihin autonomisia laivoja tarvitaan? Energiatehokkuus Autonominen laiva mahdollistaa koko laivan uudelleen suunnittelun Minimoidut miehistötilat
Tulevaisuuden autonomiset laivat Mika Hyvönen Yliopistotutkija, TkT Mihin autonomisia laivoja tarvitaan? Energiatehokkuus Autonominen laiva mahdollistaa koko laivan uudelleen suunnittelun Minimoidut miehistötilat
Online-oppiva ilmavalvontajärjestelmän suorituskykymalli
 Online-oppiva ilmavalvontajärjestelmän suorituskykymalli MATINE:n tutkimusseminaari 16.11.2017 Juha Jylhä ja Marja Ruotsalainen Tampereen teknillinen yliopisto Signaalinkäsittelyn laboratorio Hankkeelle
Online-oppiva ilmavalvontajärjestelmän suorituskykymalli MATINE:n tutkimusseminaari 16.11.2017 Juha Jylhä ja Marja Ruotsalainen Tampereen teknillinen yliopisto Signaalinkäsittelyn laboratorio Hankkeelle
Kandidaatintutkielman aineistonhankinta ja analyysi
 Kandidaatintutkielman aineistonhankinta ja analyysi Anna-Kaisa Ylitalo M 315, anna-kaisa.ylitalo@jyu.fi Musiikin, taiteen ja kulttuurin tutkimuksen laitos Jyväskylän yliopisto 2018 2 Havaintomatriisi Havaintomatriisi
Kandidaatintutkielman aineistonhankinta ja analyysi Anna-Kaisa Ylitalo M 315, anna-kaisa.ylitalo@jyu.fi Musiikin, taiteen ja kulttuurin tutkimuksen laitos Jyväskylän yliopisto 2018 2 Havaintomatriisi Havaintomatriisi
Seurantalaskimen simulointi- ja suorituskykymallien vertailu (valmiin työn esittely) Joona Karjalainen
 Joona Karjalainen") Seurantalaskimen simulointi- ja suorituskykymallien vertailu (valmiin työn esittely) Joona Karjalainen 08.09.2014 Ohjaaja: DI Mikko Harju Valvoja: Prof. Kai Virtanen Työn saa tallentaa ja julkistaa Aalto-yliopiston
Seurantalaskimen simulointi- ja suorituskykymallien vertailu (valmiin työn esittely) Joona Karjalainen 08.09.2014 Ohjaaja: DI Mikko Harju Valvoja: Prof. Kai Virtanen Työn saa tallentaa ja julkistaa Aalto-yliopiston
Virhearviointi. Fysiikassa on tärkeää tietää tulosten tarkkuus.
 Virhearviointi Fysiikassa on tärkeää tietää tulosten tarkkuus. Virhelajit A. Tilastolliset virheet= satunnaisvirheet, joita voi arvioida tilastollisin menetelmin B. Systemaattiset virheet = virheet, joita
Virhearviointi Fysiikassa on tärkeää tietää tulosten tarkkuus. Virhelajit A. Tilastolliset virheet= satunnaisvirheet, joita voi arvioida tilastollisin menetelmin B. Systemaattiset virheet = virheet, joita
Mittaushavaintojen täsmällinen käsittelymenenetelmä
 Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
Insinööritoimisto Geotesti Oy TÄRINÄSELIVITYS TYÖNRO 060304. Toijalan asema-alueen tärinäselvitys. Toijala
 Insinööritoimisto Geotesti Oy TÄRINÄSELIVITYS TYÖNRO 060304 Toijalan asema-alueen tärinäselvitys Toijala Insinööritoimisto TÄRINÄSELVITYS Geotesti Oy RI Tiina Ärväs 02.01.2006 1(8) TYÖNRO 060304 Toijalan
Insinööritoimisto Geotesti Oy TÄRINÄSELIVITYS TYÖNRO 060304 Toijalan asema-alueen tärinäselvitys Toijala Insinööritoimisto TÄRINÄSELVITYS Geotesti Oy RI Tiina Ärväs 02.01.2006 1(8) TYÖNRO 060304 Toijalan
LIITE 1 VIRHEEN ARVIOINNISTA
 1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
Mittausjärjestelmän kalibrointi ja mittausepävarmuus
 Mittausjärjestelmän kalibrointi ja mittausepävarmuus Kalibrointi kalibroinnin merkitys kansainvälinen ja kansallinen mittanormaalijärjestelmä kalibroinnin määritelmä mittausjärjestelmän kalibrointivaihtoehdot
Mittausjärjestelmän kalibrointi ja mittausepävarmuus Kalibrointi kalibroinnin merkitys kansainvälinen ja kansallinen mittanormaalijärjestelmä kalibroinnin määritelmä mittausjärjestelmän kalibrointivaihtoehdot
MTTTP5, luento Luottamusväli, määritelmä
 23.11.2017/1 MTTTP5, luento 23.11.2017 Luottamusväli, määritelmä Olkoot A ja B satunnaisotoksen perusteella määriteltyjä satunnaismuuttujia. Väli (A, B) on parametrin 100(1 - ) %:n luottamusväli, jos P(A
23.11.2017/1 MTTTP5, luento 23.11.2017 Luottamusväli, määritelmä Olkoot A ja B satunnaisotoksen perusteella määriteltyjä satunnaismuuttujia. Väli (A, B) on parametrin 100(1 - ) %:n luottamusväli, jos P(A
Metsäkoneiden sensoritekniikka kehittyy. Heikki Hyyti, Aalto-yliopisto
 Metsäkoneiden sensoritekniikka kehittyy, Metsäkoneiden sensoritekniikka kehittyy Miksi uutta sensoritekniikkaa? Tarkka paikkatieto metsässä Metsäkoneen ja puomin asennon mittaus Konenäkö Laserkeilaus Tietolähteiden
Metsäkoneiden sensoritekniikka kehittyy, Metsäkoneiden sensoritekniikka kehittyy Miksi uutta sensoritekniikkaa? Tarkka paikkatieto metsässä Metsäkoneen ja puomin asennon mittaus Konenäkö Laserkeilaus Tietolähteiden
Mittausepävarmuuden laskeminen
 Mittausepävarmuuden laskeminen Mittausepävarmuuden laskemisesta on useita standardeja ja suosituksia Yleisimmin hyväksytty on International Organization for Standardization (ISO): Guide to the epression
Mittausepävarmuuden laskeminen Mittausepävarmuuden laskemisesta on useita standardeja ja suosituksia Yleisimmin hyväksytty on International Organization for Standardization (ISO): Guide to the epression
OHJ-7600 Ihminen ja tekniikka -seminaari, 4 op Käyttäjäkokemuksen kvantitatiivinen analyysi. Luento 3
 OHJ-7600 Ihminen ja tekniikka -seminaari, 4 op Käyttäjäkokemuksen kvantitatiivinen analyysi Luento 3 Tutkimussuunnitelman rakenne-ehdotus Otsikko 1. Motivaatio/tausta 2. Tutkimusaihe/ -tavoitteet ja kysymykset
OHJ-7600 Ihminen ja tekniikka -seminaari, 4 op Käyttäjäkokemuksen kvantitatiivinen analyysi Luento 3 Tutkimussuunnitelman rakenne-ehdotus Otsikko 1. Motivaatio/tausta 2. Tutkimusaihe/ -tavoitteet ja kysymykset
TTY Mittausten koekenttä. Käyttö. Sijainti
 TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
Johdatus tekoälyyn. Luento 6.10.2011: Koneoppiminen. Patrik Hoyer. [ Kysykää ja kommentoikaa luennon aikana! ]
![Johdatus tekoälyyn. Luento 6.10.2011: Koneoppiminen. Patrik Hoyer. [ Kysykää ja kommentoikaa luennon aikana! ]](/thumbs/31/15323331.jpg "Johdatus tekoälyyn. Luento 6.10.2011: Koneoppiminen. Patrik Hoyer. [ Kysykää ja kommentoikaa luennon aikana! ]") Johdatus tekoälyyn Luento 6.10.2011: Koneoppiminen Patrik Hoyer [ Kysykää ja kommentoikaa luennon aikana! ] Koneoppiminen? Määritelmä: kone = tietokone, tietokoneohjelma oppiminen = ongelmanratkaisukyvyn
Johdatus tekoälyyn Luento 6.10.2011: Koneoppiminen Patrik Hoyer [ Kysykää ja kommentoikaa luennon aikana! ] Koneoppiminen? Määritelmä: kone = tietokone, tietokoneohjelma oppiminen = ongelmanratkaisukyvyn
Vanhankaupunginkosken ultraäänikuvaukset Simsonar Oy Pertti Paakkolanvaara
 Vanhankaupunginkosken ultraäänikuvaukset 15.7. 14.11.2014 Simsonar Oy Pertti Paakkolanvaara Avaintulokset 2500 2000 Ylös vaellus pituusluokittain: 1500 1000 500 0 35-45 cm 45-60 cm 60-70 cm >70 cm 120
Vanhankaupunginkosken ultraäänikuvaukset 15.7. 14.11.2014 Simsonar Oy Pertti Paakkolanvaara Avaintulokset 2500 2000 Ylös vaellus pituusluokittain: 1500 1000 500 0 35-45 cm 45-60 cm 60-70 cm >70 cm 120
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
Tekoäly ja koneoppiminen metsävaratiedon apuna
 Tekoäly ja koneoppiminen metsävaratiedon apuna Arbonaut Oy ja LUT University 26. marraskuuta 2018 Metsätieteen päivä 2018 Koneoppimisen kohteena ovat lukujen sijasta jakaumat Esimerkki 1 Koneoppimisessa
Tekoäly ja koneoppiminen metsävaratiedon apuna Arbonaut Oy ja LUT University 26. marraskuuta 2018 Metsätieteen päivä 2018 Koneoppimisen kohteena ovat lukujen sijasta jakaumat Esimerkki 1 Koneoppimisessa
Kansallinen maastotietokanta. KMTK Kuntien tuotantoprosessit: Selvitys mobiilikartoitusmenetelmistä
 Kansallinen maastotietokanta KMTK Kuntien tuotantoprosessit: Selvitys mobiilikartoitusmenetelmistä Projektin selvitys 1 Sisältö 1 YLEISTÄ... 2 1.1 LYHENTEISTÄ JA TERMEISTÄ... 2 2 YLEISTÄ MOBIILIKARTOITUSJÄRJESTELMISTÄ...
Kansallinen maastotietokanta KMTK Kuntien tuotantoprosessit: Selvitys mobiilikartoitusmenetelmistä Projektin selvitys 1 Sisältö 1 YLEISTÄ... 2 1.1 LYHENTEISTÄ JA TERMEISTÄ... 2 2 YLEISTÄ MOBIILIKARTOITUSJÄRJESTELMISTÄ...
Laserkeilauksella kattavaa tietoa kaupunkimetsistä
 Laserkeilauksella kattavaa tietoa kaupunkimetsistä Topi Tanhuanpää HY, Metsätieteiden osasto / UEF, Historia- ja maantieteiden osasto Kaupunkimetsät: Mitä ne ovat? Kaupungissa ja sen laitamilla kasvavien
Laserkeilauksella kattavaa tietoa kaupunkimetsistä Topi Tanhuanpää HY, Metsätieteiden osasto / UEF, Historia- ja maantieteiden osasto Kaupunkimetsät: Mitä ne ovat? Kaupungissa ja sen laitamilla kasvavien
761121P-01 FYSIIKAN LABORATORIOTYÖT 1. Oulun yliopisto Fysiikan tutkinto-ohjelma Kevät 2016
 1 76111P-01 FYSIIKAN LABORATORIOTYÖT 1 Oulun yliopisto Fysiikan tutkinto-ohjelma Kevät 016 JOHDANTO Fysiikassa pyritään löytämään luonnosta lainalaisuuksia, joita voidaan mitata kokeellisesti ja kuvata
1 76111P-01 FYSIIKAN LABORATORIOTYÖT 1 Oulun yliopisto Fysiikan tutkinto-ohjelma Kevät 016 JOHDANTO Fysiikassa pyritään löytämään luonnosta lainalaisuuksia, joita voidaan mitata kokeellisesti ja kuvata
Kvantitatiiviset tutkimusmenetelmät maantieteessä
 Kvantitatiiviset tutkimusmenetelmät maantieteessä Harjoitukset: 2 Muuttujan normaaliuden testaaminen, merkitsevyys tasot ja yhden otoksen testit FT Joni Vainikka, Yliopisto-opettaja, GO218, joni.vainikka@oulu.fi
Kvantitatiiviset tutkimusmenetelmät maantieteessä Harjoitukset: 2 Muuttujan normaaliuden testaaminen, merkitsevyys tasot ja yhden otoksen testit FT Joni Vainikka, Yliopisto-opettaja, GO218, joni.vainikka@oulu.fi
Tree map system in harvester
 Tree map system in harvester Fibic seminar 12.6.2013 Lahti Timo Melkas, Metsäteho Oy Mikko Miettinen, Argone Oy Kalle Einola, Ponsse Oyj Project goals EffFibre project 2011-2013 (WP3) To evaluate the accuracy
Tree map system in harvester Fibic seminar 12.6.2013 Lahti Timo Melkas, Metsäteho Oy Mikko Miettinen, Argone Oy Kalle Einola, Ponsse Oyj Project goals EffFibre project 2011-2013 (WP3) To evaluate the accuracy
Korkean resoluution ja suuren kuva-alueen SAR
 Korkean resoluution ja suuren kuva-alueen SAR MATINE tutkimusseminaari 17.11.2016 Risto Vehmas, Juha Jylhä, Minna Väilä, Ari Visa Tampereen teknillinen yliopisto Signaalinkäsittelyn laitos Hankkeelle myönnetty
Korkean resoluution ja suuren kuva-alueen SAR MATINE tutkimusseminaari 17.11.2016 Risto Vehmas, Juha Jylhä, Minna Väilä, Ari Visa Tampereen teknillinen yliopisto Signaalinkäsittelyn laitos Hankkeelle myönnetty
monitavoitteisissa päätöspuissa (Valmiin työn esittely) Mio Parmi Ohjaaja: Prof. Kai Virtanen Valvoja: Prof.
 Mio Parmi Ohjaaja: Prof. Kai Virtanen Valvoja: Prof.") Epätäydellisen preferenssiinformaation hyödyntäminen monitavoitteisissa päätöspuissa (Valmiin työn esittely) Mio Parmi 15.1.2018 Ohjaaja: Prof. Kai Virtanen Valvoja: Prof. Kai Virtanen Tausta Päätöspuu
Epätäydellisen preferenssiinformaation hyödyntäminen monitavoitteisissa päätöspuissa (Valmiin työn esittely) Mio Parmi 15.1.2018 Ohjaaja: Prof. Kai Virtanen Valvoja: Prof. Kai Virtanen Tausta Päätöspuu
Projektisuunnitelma ja johdanto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Paula Sirén
 Projektisuunnitelma ja johdanto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Paula Sirén Sonifikaatio Menetelmä Sovelluksia Mahdollisuuksia Ongelmia Sonifikaatiosovellus: NIR-spektroskopia kariesmittauksissa
Projektisuunnitelma ja johdanto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Paula Sirén Sonifikaatio Menetelmä Sovelluksia Mahdollisuuksia Ongelmia Sonifikaatiosovellus: NIR-spektroskopia kariesmittauksissa
Teema 3: Tilastollisia kuvia ja tunnuslukuja
 Teema 3: Tilastollisia kuvia ja tunnuslukuja Tilastoaineiston peruselementit: havainnot ja muuttujat havainto: yhtä havaintoyksikköä koskevat tiedot esim. henkilön vastaukset kyselylomakkeen kysymyksiin
Teema 3: Tilastollisia kuvia ja tunnuslukuja Tilastoaineiston peruselementit: havainnot ja muuttujat havainto: yhtä havaintoyksikköä koskevat tiedot esim. henkilön vastaukset kyselylomakkeen kysymyksiin
FoA5 Tilastollisen analyysin perusteet puheentutkimuksessa. 9. luento. Pertti Palo
 FoA5 Tilastollisen analyysin perusteet puheentutkimuksessa 9. luento Pertti Palo 22.11.2012 Käytännön asioita Eihän kukaan paikallaolijoista tee 3 op kurssia? 2. seminaarin ilmoittautuminen. 2. harjoitustyön
FoA5 Tilastollisen analyysin perusteet puheentutkimuksessa 9. luento Pertti Palo 22.11.2012 Käytännön asioita Eihän kukaan paikallaolijoista tee 3 op kurssia? 2. seminaarin ilmoittautuminen. 2. harjoitustyön
Tiedonkeruun miljoonat pisteet
 Tiedonkeruun miljoonat pisteet Arttu Julin, Rakennetun ympäristön mittauksen ja mallinnuksen instituutti, Aalto-yliopisto. arttu.julin@aalto.fi Kaupunkimallit 2017 seminaari 8.11.2017 Rakennetun ympäristön
Tiedonkeruun miljoonat pisteet Arttu Julin, Rakennetun ympäristön mittauksen ja mallinnuksen instituutti, Aalto-yliopisto. arttu.julin@aalto.fi Kaupunkimallit 2017 seminaari 8.11.2017 Rakennetun ympäristön
Taajuusmittauskilpailu Hertsien herruus 2008. Mittausraportti
 Taajuusmittauskilpailu Hertsien herruus 2008 1. MITTAUSJÄRJESTELMÄ Mittausraportti Petri Kotilainen OH3MCK Mittausjärjestelmän lohkokaavio on kuvattu alla. Vastaanottoon käytettiin magneettisilmukkaantennia
Taajuusmittauskilpailu Hertsien herruus 2008 1. MITTAUSJÄRJESTELMÄ Mittausraportti Petri Kotilainen OH3MCK Mittausjärjestelmän lohkokaavio on kuvattu alla. Vastaanottoon käytettiin magneettisilmukkaantennia
Kaksiluokkainen tapaus, lineaarinen päätöspinta, lineaarisesti erottuvat luokat
 1 Tukivektoriluokittelija Tukivektorikoneeseen (support vector machine) perustuva luoikittelija on tilastollisen koneoppimisen teoriaan perustuva lineaarinen luokittelija. Perusajatus on sovittaa kahden
1 Tukivektoriluokittelija Tukivektorikoneeseen (support vector machine) perustuva luoikittelija on tilastollisen koneoppimisen teoriaan perustuva lineaarinen luokittelija. Perusajatus on sovittaa kahden
Vaihtoehtoisia malleja puuston kokojakauman muodostamiseen
 Vaihtoehtoisia malleja puuston kokojakauman muodostamiseen Jouni Siipilehto, Harri Lindeman, Jori Uusitalo, Xiaowei Yu, Mikko Vastaranta Luonnonvarakeskus Geodeettinen laitos Helsingin yliopisto Vertailtavat
Vaihtoehtoisia malleja puuston kokojakauman muodostamiseen Jouni Siipilehto, Harri Lindeman, Jori Uusitalo, Xiaowei Yu, Mikko Vastaranta Luonnonvarakeskus Geodeettinen laitos Helsingin yliopisto Vertailtavat
SIMO tutkimuskäytössä. SIMO seminaari 23. maaliskuuta 2011 Antti Mäkinen Simosol Oy
 SIMO tutkimuskäytössä SIMO seminaari 23. maaliskuuta 2011 Antti Mäkinen Simosol Oy Alkuvaiheet SIMOn juuret Helsingin Yliopiston metsävarojen käytön laitoksella mahdollistivat ohjelmiston luontevan soveltamisen
SIMO tutkimuskäytössä SIMO seminaari 23. maaliskuuta 2011 Antti Mäkinen Simosol Oy Alkuvaiheet SIMOn juuret Helsingin Yliopiston metsävarojen käytön laitoksella mahdollistivat ohjelmiston luontevan soveltamisen
MS-A0502 Todennäköisyyslaskennan ja tilastotieteen peruskurssi
 MS-A0502 Todennäköisyyslaskennan ja tilastotieteen peruskurssi 4A Parametrien estimointi Lasse Leskelä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Syksy 2016, periodi
MS-A0502 Todennäköisyyslaskennan ja tilastotieteen peruskurssi 4A Parametrien estimointi Lasse Leskelä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Syksy 2016, periodi
Liikemittaukset purjeveneessä, MP:n kilpakoulu 2013-01-28
 Liikemittaukset purjeveneessä, MP:n kilpakoulu 2013-01-28 Christer Helenelund Miksi mitata veneen liikkeitä? Liikkeet vaikuttavat venevauhtiin ja hallittavuuteen Liikkeet vaikuttavat myös heikentävästi
Liikemittaukset purjeveneessä, MP:n kilpakoulu 2013-01-28 Christer Helenelund Miksi mitata veneen liikkeitä? Liikkeet vaikuttavat venevauhtiin ja hallittavuuteen Liikkeet vaikuttavat myös heikentävästi
Säilörehunurmen sadon määrän kaukokartoitus
 Säilörehunurmen sadon määrän kaukokartoitus Jere Kaivosoja, LUKE LYHYESTI Kaukokartoitusta droneilla ja satelliiteilla Dronet: +Tarkka resoluutio +Absoluuttiset arvot mahdollisia +Tarkemmat laatutiedot
Säilörehunurmen sadon määrän kaukokartoitus Jere Kaivosoja, LUKE LYHYESTI Kaukokartoitusta droneilla ja satelliiteilla Dronet: +Tarkka resoluutio +Absoluuttiset arvot mahdollisia +Tarkemmat laatutiedot
Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta
 Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta Sanna Kaasalainen Kaukokartoituksen ja Fotogrammetrian Osasto Ilmastonmuutos ja ääriarvot 13.9.2012 Ympäristön Aktiivinen
Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta Sanna Kaasalainen Kaukokartoituksen ja Fotogrammetrian Osasto Ilmastonmuutos ja ääriarvot 13.9.2012 Ympäristön Aktiivinen
LAS- ja ilmakuva-aineistojen käsittely ArcGIS:ssä
 Esri Finland LAS- ja ilmakuva-aineistojen käsittely ArcGIS:ssä November 2012 Janne Saarikko Agenda Lidar-aineistot ja ArcGIS 10.1 - Miten LAS-aineistoa voidaan hyödyntää? - Aineistojen hallinta LAS Dataset
Esri Finland LAS- ja ilmakuva-aineistojen käsittely ArcGIS:ssä November 2012 Janne Saarikko Agenda Lidar-aineistot ja ArcGIS 10.1 - Miten LAS-aineistoa voidaan hyödyntää? - Aineistojen hallinta LAS Dataset
Joonas Haapala Ohjaaja: DI Heikki Puustinen Valvoja: Prof. Kai Virtanen
 Hävittäjälentokoneen reitin suunnittelussa käytettävän dynaamisen ja monitavoitteisen verkko-optimointitehtävän ratkaiseminen A*-algoritmilla (valmiin työn esittely) Joonas Haapala 8.6.2015 Ohjaaja: DI
Hävittäjälentokoneen reitin suunnittelussa käytettävän dynaamisen ja monitavoitteisen verkko-optimointitehtävän ratkaiseminen A*-algoritmilla (valmiin työn esittely) Joonas Haapala 8.6.2015 Ohjaaja: DI
Mobiilikartoitusdatan prosessointi ja hyödyntäminen
 Mobiilikartoitusdatan prosessointi ja hyödyntäminen Alkuprosessointi - Vaiheet 1. Ajoradan jälkilaskenta 2. Havaintodatan korjaus 3. RGB-värjäys 4. Tukipisteiden käyttö Ajoradan jälkilaskenta Korjataan
Mobiilikartoitusdatan prosessointi ja hyödyntäminen Alkuprosessointi - Vaiheet 1. Ajoradan jälkilaskenta 2. Havaintodatan korjaus 3. RGB-värjäys 4. Tukipisteiden käyttö Ajoradan jälkilaskenta Korjataan
Mitä IHMEttä on MIXTURE -mallintaminen?
 JYVÄSKYLÄN YLIOPISTO Matematiikan ja tilastotieteen laitos Esko Leskinen 28.5.2009 Mitä IHMEttä on MIXTURE -mallintaminen? A-L Lyyra 2009 2 1. Taustaa mixture sekoitus (mikstuura) sekoitetut jakaumat sekoitetut
JYVÄSKYLÄN YLIOPISTO Matematiikan ja tilastotieteen laitos Esko Leskinen 28.5.2009 Mitä IHMEttä on MIXTURE -mallintaminen? A-L Lyyra 2009 2 1. Taustaa mixture sekoitus (mikstuura) sekoitetut jakaumat sekoitetut

MS-A0502 Todennäköisyyslaskennan ja tilastotieteen peruskurssi
 MS-A0502 Todennäköisyyslaskennan ja tilastotieteen peruskurssi 3B Tilastolliset datajoukot Lasse Leskelä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Syksy 2016,
MS-A0502 Todennäköisyyslaskennan ja tilastotieteen peruskurssi 3B Tilastolliset datajoukot Lasse Leskelä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Syksy 2016,
Maastolaserkeilauksen mahdollisuudet metsävaratiedon hankinnassa ja puunkorjuussa. Harri Kaartinen , FOREST BIG DATA -hankkeen tulosseminaari
 Maastolaserkeilauksen mahdollisuudet metsävaratiedon hankinnassa ja puunkorjuussa Harri Kaartinen 9.3.2016, FOREST BIG DATA -hankkeen tulosseminaari Maastolaserkeilaus Staattinen laserkeilaus, keilain
Maastolaserkeilauksen mahdollisuudet metsävaratiedon hankinnassa ja puunkorjuussa Harri Kaartinen 9.3.2016, FOREST BIG DATA -hankkeen tulosseminaari Maastolaserkeilaus Staattinen laserkeilaus, keilain
MS-A0503 Todennäköisyyslaskennan ja tilastotieteen peruskurssi
 MS-A0503 Todennäköisyyslaskennan ja tilastotieteen peruskurssi 3B Tilastolliset datajoukot Lasse Leskelä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Lukuvuosi 2016
MS-A0503 Todennäköisyyslaskennan ja tilastotieteen peruskurssi 3B Tilastolliset datajoukot Lasse Leskelä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Lukuvuosi 2016
MS-A0503 Todennäköisyyslaskennan ja tilastotieteen peruskurssi
 MS-A0503 Todennäköisyyslaskennan ja tilastotieteen peruskurssi 3B Tilastolliset datajoukot Lasse Leskelä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Lukuvuosi 2016
MS-A0503 Todennäköisyyslaskennan ja tilastotieteen peruskurssi 3B Tilastolliset datajoukot Lasse Leskelä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Lukuvuosi 2016
Move! laadun varmistus arvioinnissa. Marjo Rinne, TtT, erikoistutkija UKK instituutti, Tampere
 Move! laadun varmistus arvioinnissa Marjo Rinne, TtT, erikoistutkija UKK instituutti, Tampere Fyysisen toimintakyvyn mittaaminen Tarkoituksena tuottaa luotettavaa tietoa mm. fyysisestä suorituskyvystä
Move! laadun varmistus arvioinnissa Marjo Rinne, TtT, erikoistutkija UKK instituutti, Tampere Fyysisen toimintakyvyn mittaaminen Tarkoituksena tuottaa luotettavaa tietoa mm. fyysisestä suorituskyvystä
Autonomisuus metsässä. Heikki Hyyti Studia Militaria
 Autonomisuus metsässä Heikki Hyyti Autonomisuus metsässä Autonomisuus? Autonomisuuden haasteita Paikannustarkkuus Ympäristön havainnointi metsässä Metsäkoneen asennon mittaus ja säätö Automaatioasteen
Autonomisuus metsässä Heikki Hyyti Autonomisuus metsässä Autonomisuus? Autonomisuuden haasteita Paikannustarkkuus Ympäristön havainnointi metsässä Metsäkoneen asennon mittaus ja säätö Automaatioasteen
Laserkeilaus ja rakennettu ympäristö, Teemu Salonen Apulaiskaupungingeodeetti Porin kaupunki
 Laserkeilaus ja rakennettu ympäristö, Teemu Salonen Apulaiskaupungingeodeetti Porin kaupunki Teemu Salonen Apulaiskaupungingeodeetti Esityksen sisältö: - Maanmittauslaitoksen laserkeilausaineistojen hyödyntäminen
Laserkeilaus ja rakennettu ympäristö, Teemu Salonen Apulaiskaupungingeodeetti Porin kaupunki Teemu Salonen Apulaiskaupungingeodeetti Esityksen sisältö: - Maanmittauslaitoksen laserkeilausaineistojen hyödyntäminen
DIGITRAFFIC - Yleisesittely
 DIGITRAFFIC - Yleisesittely DIGITRAFFIC Työpaja 3.9.2002, 12.30 16.00 Liikenne- ja viestintäministeriö MIKÄ ON DIGITRAFFIC? Digitaalinen liikenteen tietomalli, virtuaali liikenne Laskennallinen kokonaiskuva
DIGITRAFFIC - Yleisesittely DIGITRAFFIC Työpaja 3.9.2002, 12.30 16.00 Liikenne- ja viestintäministeriö MIKÄ ON DIGITRAFFIC? Digitaalinen liikenteen tietomalli, virtuaali liikenne Laskennallinen kokonaiskuva
Tilastollisen analyysin perusteet Luento 1: Lokaatio ja hajonta
 Tilastollisen analyysin perusteet Luento 1: ja hajonta Sisältö Havaittujen arvojen jakauma Havaittujen arvojen jakaumaa voidaan kuvailla ja esitellä tiivistämällä havaintoarvot sopivaan muotoon. Jakauman
Tilastollisen analyysin perusteet Luento 1: ja hajonta Sisältö Havaittujen arvojen jakauma Havaittujen arvojen jakaumaa voidaan kuvailla ja esitellä tiivistämällä havaintoarvot sopivaan muotoon. Jakauman
Kehittyvien satelliittiaineistojen mahdollisuudet
 VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD Kehittyvien satelliittiaineistojen mahdollisuudet Forest Big Data loppuseminaari, Heureka 8.3.2016 Tuomas Häme, Laura Sirro, Yrjö Rauste VTT VTT:n satelliittikuvatutkimusaiheet
VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD Kehittyvien satelliittiaineistojen mahdollisuudet Forest Big Data loppuseminaari, Heureka 8.3.2016 Tuomas Häme, Laura Sirro, Yrjö Rauste VTT VTT:n satelliittikuvatutkimusaiheet
Signaalien taajuusalueet
 Signaalien taajuusalueet 1420 MHz H 2 GPS: kaksi taajuutta, tulevaisuudessa kolme Galileo: useita taajuuksia Kuinka paikannus tehdään? Kantoaalto kahdella taajuudella L1 = 1575.42 MHz = 19.0 cm L2 = 1227.60
Signaalien taajuusalueet 1420 MHz H 2 GPS: kaksi taajuutta, tulevaisuudessa kolme Galileo: useita taajuuksia Kuinka paikannus tehdään? Kantoaalto kahdella taajuudella L1 = 1575.42 MHz = 19.0 cm L2 = 1227.60
Satelliittipaikannuksen tarkkuus hakkuukoneessa. Timo Melkas Mika Salmi Jarmo Hämäläinen
 Satelliittipaikannuksen tarkkuus hakkuukoneessa Timo Melkas Mika Salmi Jarmo Hämäläinen Tavoite Tutkimuksen tavoite oli selvittää nykyisten hakkuukoneissa vakiovarusteena olevien satelliittivastaanottimien
Satelliittipaikannuksen tarkkuus hakkuukoneessa Timo Melkas Mika Salmi Jarmo Hämäläinen Tavoite Tutkimuksen tavoite oli selvittää nykyisten hakkuukoneissa vakiovarusteena olevien satelliittivastaanottimien
SwemaAir 5 Käyttöohje
 SwemaAir 5 Käyttöohje 1. Esittely SwemaAir 5 on kuumalanka-anemometri lämpötilan, ilmanvirtauksen sekä -nopeuden mittaukseen. Lämpötila voidaan esittää joko C, tai F, ilmannopeus m/s tai fpm ja ilman virtaus
SwemaAir 5 Käyttöohje 1. Esittely SwemaAir 5 on kuumalanka-anemometri lämpötilan, ilmanvirtauksen sekä -nopeuden mittaukseen. Lämpötila voidaan esittää joko C, tai F, ilmannopeus m/s tai fpm ja ilman virtaus
Mittaustulosten tilastollinen käsittely
 Mittaustulosten tilastollinen käsittely n kertaa toistetun mittauksen tulos lasketaan aritmeettisena keskiarvona n 1 x = x i n i= 1 Mittaustuloksen hajonnasta aiheutuvaa epävarmuutta kuvaa keskiarvon keskivirhe
Mittaustulosten tilastollinen käsittely n kertaa toistetun mittauksen tulos lasketaan aritmeettisena keskiarvona n 1 x = x i n i= 1 Mittaustuloksen hajonnasta aiheutuvaa epävarmuutta kuvaa keskiarvon keskivirhe
SIMO, Siltojen monitorointi. Ilkka Hakola, VTT
 SIMO, Siltojen monitorointi Ilkka Hakola, VTT SIMO, Projektin yleiskatsaus SIMO projekti on TEKES rahotteinen projekti (ei mukana missään ohjelmassa), jossa on mukana 15 partneria. Projektin kokonaisbudjetti
SIMO, Siltojen monitorointi Ilkka Hakola, VTT SIMO, Projektin yleiskatsaus SIMO projekti on TEKES rahotteinen projekti (ei mukana missään ohjelmassa), jossa on mukana 15 partneria. Projektin kokonaisbudjetti
Älykkäiden kaupunkien mahdollisuudet JUHA KOSTIAINEN PIRKANMAAN TULEVAISUUSFOORUMI,
 Älykkäiden kaupunkien mahdollisuudet JUHA KOSTIAINEN PIRKANMAAN TULEVAISUUSFOORUMI, 16.1.2018 ÄLYKKÄIDEN KAUPUNKIEN KOLME SUKUPOLVEA (Boyd 2015) 1. SUKUPOLVI Tyypillistä teknologiaja korporaatiovetoisuus
Älykkäiden kaupunkien mahdollisuudet JUHA KOSTIAINEN PIRKANMAAN TULEVAISUUSFOORUMI, 16.1.2018 ÄLYKKÄIDEN KAUPUNKIEN KOLME SUKUPOLVEA (Boyd 2015) 1. SUKUPOLVI Tyypillistä teknologiaja korporaatiovetoisuus
Pitkän kantaman aktiivinen hyperspektraalinen laserkeilaus
 Pitkän kantaman aktiivinen hyperspektraalinen laserkeilaus MATINE:n Tutkimusseminaari, 18.11.2015 Helsinki Sanna Kaasalainen, Olli Nevalainen, Teemu Hakala Paikkatietokeskus Sisällys Taustaa Multispektraaliset
Pitkän kantaman aktiivinen hyperspektraalinen laserkeilaus MATINE:n Tutkimusseminaari, 18.11.2015 Helsinki Sanna Kaasalainen, Olli Nevalainen, Teemu Hakala Paikkatietokeskus Sisällys Taustaa Multispektraaliset
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta
 Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
KULUTTAJAN KONTEKSTI
 KULUTTAJAN KONTEKSTI ON HYÖDYNTÄMÄTÖN MOBIILIN ERITYISOMINAISUUS MARKUS TALLGREN ADFORE TECHNOLOGIES OY 2 Sisältö Tilannetietoisuus Kontekstimoottori ja tekoäly Case-esittelyt Mainonnan reaaliaikainen
KULUTTAJAN KONTEKSTI ON HYÖDYNTÄMÄTÖN MOBIILIN ERITYISOMINAISUUS MARKUS TALLGREN ADFORE TECHNOLOGIES OY 2 Sisältö Tilannetietoisuus Kontekstimoottori ja tekoäly Case-esittelyt Mainonnan reaaliaikainen
Sijainnin merkitys Itellassa GIS. Jakelun kehittämisen ajankohtaispäivä
 Jakelun kehittämisen ajankohtaispäivä Karttajärjestelmällä havainnollisuutta, tehokkuutta ja parempaa asiakaspalvelua Käytännön kokemuksia pilotoinneista ja käytössä olevista karttajärjestelmistä Juha
Jakelun kehittämisen ajankohtaispäivä Karttajärjestelmällä havainnollisuutta, tehokkuutta ja parempaa asiakaspalvelua Käytännön kokemuksia pilotoinneista ja käytössä olevista karttajärjestelmistä Juha
NOSTURIDATAN HYÖDYNTÄMINEN. Niilo Heinonen
 NOSTURIDATAN HYÖDYNTÄMINEN SISÄLTÖ Tutkimuksen tausta ja tutkimuskyssärit Tehdasympäristöt Klusterointialgoritmit Työn pohjana oleva monitorointijärjestelmä (CMS) Soveltava osuus Visuaalinen malli nosturin
NOSTURIDATAN HYÖDYNTÄMINEN SISÄLTÖ Tutkimuksen tausta ja tutkimuskyssärit Tehdasympäristöt Klusterointialgoritmit Työn pohjana oleva monitorointijärjestelmä (CMS) Soveltava osuus Visuaalinen malli nosturin
DIGIBONUSTEHTÄVÄ: MPKJ NCC INDUSTRY OY LOPPURAPORTTI
 DIGIBONUSTEHTÄVÄ: MPKJ NCC INDUSTRY OY LOPPURAPORTTI Tekijä: Marko Olli 16.10.2018 Sisällys 1 Johdanto...3 2 Hankkeen tavoitteet ja vaikuttavuus...3 3 Laitteisto ja mittaustarkkuus...3 4 Pilotointi ja
DIGIBONUSTEHTÄVÄ: MPKJ NCC INDUSTRY OY LOPPURAPORTTI Tekijä: Marko Olli 16.10.2018 Sisällys 1 Johdanto...3 2 Hankkeen tavoitteet ja vaikuttavuus...3 3 Laitteisto ja mittaustarkkuus...3 4 Pilotointi ja
Viikko 2: Ensimmäiset ennustajat Matti Kääriäinen matti.kaariainen@cs.helsinki.fi
 Viikko 2: Ensimmäiset ennustajat Matti Kääriäinen matti.kaariainen@cs.helsinki.fi Exactum C222, 5.-7.11.2008. 1 Tällä viikolla Sisältösuunnitelma: Ennustamisstrategioista Koneoppimismenetelmiä: k-nn (luokittelu
Viikko 2: Ensimmäiset ennustajat Matti Kääriäinen matti.kaariainen@cs.helsinki.fi Exactum C222, 5.-7.11.2008. 1 Tällä viikolla Sisältösuunnitelma: Ennustamisstrategioista Koneoppimismenetelmiä: k-nn (luokittelu
54. Tehdään yhden selittäjän lineaarinen regressioanalyysi, kun selittäjänä on määrällinen muuttuja (ja selitettävä myös):
:") Tilastollinen tietojenkäsittely / SPSS Harjoitus 5 Tarkastellaan ensin aineistoa KUNNAT. Kyseessähän on siis kokonaistutkimusaineisto, joten tilastollisia testejä ja niiden merkitsevyystarkasteluja ei
Tilastollinen tietojenkäsittely / SPSS Harjoitus 5 Tarkastellaan ensin aineistoa KUNNAT. Kyseessähän on siis kokonaistutkimusaineisto, joten tilastollisia testejä ja niiden merkitsevyystarkasteluja ei
JOHDATUS TEKOÄLYYN TEEMU ROOS
 JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
JOHDATUS TEKOÄLYYN TEEMU ROOS TERMINATOR SIGNAALINKÄSITTELY KUVA VOIDAAN TULKITA KOORDINAATTIEN (X,Y) FUNKTIONA. LÄHDE: S. SEITZ VÄRIKUVA KOOSTUU KOLMESTA KOMPONENTISTA (R,G,B). ÄÄNI VASTAAVASTI MUUTTUJAN
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / Systeemitekniikka Jan 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / Systeemitekniikka Jan 2019
Datan analysointi ja visualisointi Teollisen internetin työpaja
 Datan analysointi ja visualisointi Teollisen internetin työpaja Jouni Tervonen, Oulun yliopisto, Oulun Eteläisen instituutti 14.3.2016 Johdanto Tavoite yhdessä määritellä miten data-analytiikkaa voi auttaa
Datan analysointi ja visualisointi Teollisen internetin työpaja Jouni Tervonen, Oulun yliopisto, Oulun Eteläisen instituutti 14.3.2016 Johdanto Tavoite yhdessä määritellä miten data-analytiikkaa voi auttaa
Harjoittele tulkintoja
 Harjoittele tulkintoja Syksy 9: KT (55 op) Kvantitatiivisen aineiston keruu ja analyysi SPSS tulosteiden tulkintaa/til Analyysit perustuvat aineistoon: Haavio-Mannila, Elina & Kontula, Osmo (1993): Suomalainen
Harjoittele tulkintoja Syksy 9: KT (55 op) Kvantitatiivisen aineiston keruu ja analyysi SPSS tulosteiden tulkintaa/til Analyysit perustuvat aineistoon: Haavio-Mannila, Elina & Kontula, Osmo (1993): Suomalainen
FOTOGRAMMETRINEN PISTETIHENNYS
 FOTOGRAMMETRINEN PISTETIHENNYS 1. Yleistä 2. Ilmakuvaus SKM Gisair Oy Työssä määritettiin ulkoinen orientointi Sotkamon kunnan keskustan alueen ilmakuvaukselle. Ilmakuvauksen teki SKM Gisair Oy keväällä
FOTOGRAMMETRINEN PISTETIHENNYS 1. Yleistä 2. Ilmakuvaus SKM Gisair Oy Työssä määritettiin ulkoinen orientointi Sotkamon kunnan keskustan alueen ilmakuvaukselle. Ilmakuvauksen teki SKM Gisair Oy keväällä
Estimointi. Vilkkumaa / Kuusinen 1
 Estimointi Vilkkumaa / Kuusinen 1 Motivointi Tilastollisessa tutkimuksessa oletetaan jonkin jakauman generoineen tutkimuksen kohteena olevaa ilmiötä koskevat havainnot Tämän mallina käytettävän todennäköisyysjakauman
Estimointi Vilkkumaa / Kuusinen 1 Motivointi Tilastollisessa tutkimuksessa oletetaan jonkin jakauman generoineen tutkimuksen kohteena olevaa ilmiötä koskevat havainnot Tämän mallina käytettävän todennäköisyysjakauman
Nurmisadon mittaamisen käytäntö ja nykyteknologia. Antti Suokannas Vihreä teknologia Automatisaatio ja digitaaliset ratkaisut
 Nurmisadon mittaamisen käytäntö ja nykyteknologia Antti Suokannas Vihreä teknologia Automatisaatio ja digitaaliset ratkaisut Esityksen sisältö Yleistä mittaamisesta Sadon määrän lohkokohtainen mittaus
Nurmisadon mittaamisen käytäntö ja nykyteknologia Antti Suokannas Vihreä teknologia Automatisaatio ja digitaaliset ratkaisut Esityksen sisältö Yleistä mittaamisesta Sadon määrän lohkokohtainen mittaus
KJR-C2001 KIINTEÄN AINEEN MEKANIIKAN PERUSTEET, KEVÄT 2018
 Vastaukset palautetaan htenä PDF-tiedostona Courses:iin 1.3. klo 1 mennessä. ahdolliset asia- ja laskuvirheet ja voi ilmoittaa osoitteeseen serge.skorin@aalto.fi. askuharjoitus 1. Selitä seuraavat käsitteet:
Vastaukset palautetaan htenä PDF-tiedostona Courses:iin 1.3. klo 1 mennessä. ahdolliset asia- ja laskuvirheet ja voi ilmoittaa osoitteeseen serge.skorin@aalto.fi. askuharjoitus 1. Selitä seuraavat käsitteet:
Tässä harjoituksessa käydään läpi R-ohjelman käyttöä esimerkkidatan avulla. eli matriisissa on 200 riviä (havainnot) ja 7 saraketta (mittaus-arvot)
 ja 7 saraketta (mittaus-arvot)") R-ohjelman käyttö data-analyysissä Panu Somervuo 2014 Tässä harjoituksessa käydään läpi R-ohjelman käyttöä esimerkkidatan avulla. 0) käynnistetään R-ohjelma Huom.1 allaolevissa ohjeissa '>' merkki on R:n
R-ohjelman käyttö data-analyysissä Panu Somervuo 2014 Tässä harjoituksessa käydään läpi R-ohjelman käyttöä esimerkkidatan avulla. 0) käynnistetään R-ohjelma Huom.1 allaolevissa ohjeissa '>' merkki on R:n
Paavo Kyyrönen & Janne Raassina
 Paavo Kyyrönen & Janne Raassina 1. Johdanto 2. Historia 3. David Deutsch 4. Kvanttilaskenta ja superpositio 5. Ongelmat 6. Tutkimus 7. Esimerkkejä käyttökohteista 8. Mistä näitä saa? 9. Potentiaali 10.
Paavo Kyyrönen & Janne Raassina 1. Johdanto 2. Historia 3. David Deutsch 4. Kvanttilaskenta ja superpositio 5. Ongelmat 6. Tutkimus 7. Esimerkkejä käyttökohteista 8. Mistä näitä saa? 9. Potentiaali 10.
Laskennallinen data-analyysi II
 Laskennallinen data-analyysi II Ella Bingham, ella.bingham@cs.helsinki.fi Kevät 2008 Muuttujien valinta Kalvot perustuvat Saara Hyvösen kalvoihin 2007 Laskennallinen data-analyysi II, kevät 2008, Helsingin
Laskennallinen data-analyysi II Ella Bingham, ella.bingham@cs.helsinki.fi Kevät 2008 Muuttujien valinta Kalvot perustuvat Saara Hyvösen kalvoihin 2007 Laskennallinen data-analyysi II, kevät 2008, Helsingin
Liikehavaintojen estimointi langattomissa lähiverkoissa. Diplomityöseminaari Jukka Ahola
 Liikehavaintojen estimointi langattomissa lähiverkoissa Diplomityöseminaari Jukka Ahola ESITYKSEN SISÄLTÖ Työn tausta Tavoitteen asettelu Johdanto Liikehavaintojen jakaminen langattomassa mesh-verkossa
Liikehavaintojen estimointi langattomissa lähiverkoissa Diplomityöseminaari Jukka Ahola ESITYKSEN SISÄLTÖ Työn tausta Tavoitteen asettelu Johdanto Liikehavaintojen jakaminen langattomassa mesh-verkossa
1. Tilastollinen malli??
 1. Tilastollinen malli?? https://fi.wikipedia.org/wiki/tilastollinen_malli https://en.wikipedia.org/wiki/statistical_model http://projecteuclid.org/euclid.aos/1035844977 Tilastollinen malli?? Numeerinen
1. Tilastollinen malli?? https://fi.wikipedia.org/wiki/tilastollinen_malli https://en.wikipedia.org/wiki/statistical_model http://projecteuclid.org/euclid.aos/1035844977 Tilastollinen malli?? Numeerinen
ELEC-C5210 Satunnaisprosessit tietoliikenteessä
 ELEC-C5210 Satunnaisprosessit tietoliikenteessä Esa Ollila Aalto University, Department of Signal Processing and Acoustics, Finland esa.ollila@aalto.fi http://signal.hut.fi/~esollila/ Kevät 2017 E. Ollila
ELEC-C5210 Satunnaisprosessit tietoliikenteessä Esa Ollila Aalto University, Department of Signal Processing and Acoustics, Finland esa.ollila@aalto.fi http://signal.hut.fi/~esollila/ Kevät 2017 E. Ollila
7.4 PERUSPISTEIDEN SIJAINTI
 67 7.4 PERUSPISTEIDEN SIJAINTI Optisen systeemin peruspisteet saadaan systeemimatriisista. Käytetään seuraavan kuvan merkintöjä: Kuvassa sisäänmenotaso on ensimmäisen linssin ensimmäisessä pinnassa eli
67 7.4 PERUSPISTEIDEN SIJAINTI Optisen systeemin peruspisteet saadaan systeemimatriisista. Käytetään seuraavan kuvan merkintöjä: Kuvassa sisäänmenotaso on ensimmäisen linssin ensimmäisessä pinnassa eli
Avainsanojen poimiminen Eeva Ahonen
 Avainsanojen poimiminen 5.10.2004 Eeva Ahonen Sisältö Avainsanat Menetelmät C4.5 päätöspuut GenEx algoritmi Bayes malli Testit Tulokset Avainsanat Tiivistä tietoa dokumentin sisällöstä ihmislukijalle hakukoneelle
Avainsanojen poimiminen 5.10.2004 Eeva Ahonen Sisältö Avainsanat Menetelmät C4.5 päätöspuut GenEx algoritmi Bayes malli Testit Tulokset Avainsanat Tiivistä tietoa dokumentin sisällöstä ihmislukijalle hakukoneelle
Harha mallin arvioinnissa
 Esitelmä 12 Antti Toppila sivu 1/18 Optimointiopin seminaari Syksy 2010 Harha mallin arvioinnissa Antti Toppila 13.10.2010 Esitelmä 12 Antti Toppila sivu 2/18 Optimointiopin seminaari Syksy 2010 Sisältö
Esitelmä 12 Antti Toppila sivu 1/18 Optimointiopin seminaari Syksy 2010 Harha mallin arvioinnissa Antti Toppila 13.10.2010 Esitelmä 12 Antti Toppila sivu 2/18 Optimointiopin seminaari Syksy 2010 Sisältö
SELVITTÄJÄN KOMPETENSSISTA
 OTM, KTM, Mikko Hakola, Vaasan yliopisto, Laskentatoimen ja rahoituksen laitos Helsinki 20.11.200, Helsingin kauppakorkeakoulu Projekti: Yrityksen maksukyky ja strateginen johtaminen SELVITTÄJÄN KOMPETENSSISTA
OTM, KTM, Mikko Hakola, Vaasan yliopisto, Laskentatoimen ja rahoituksen laitos Helsinki 20.11.200, Helsingin kauppakorkeakoulu Projekti: Yrityksen maksukyky ja strateginen johtaminen SELVITTÄJÄN KOMPETENSSISTA