Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT
|
|
|
- Reijo Haapasalo
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
1 Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT Laura Ruotsalainen Paikkatietokeskus FGI, MML Matinen rahoitus:

2 INTACT tarve Taistelijan tilannetietoisuus rakennetuissa ympäristöissä, erityisesti sisätiloissa Kartta tuntemattomasta alueesta Tarkka paikka- ja navigointitieto Liike- ja kontekstitietoisuus Paikka usein ennalta tuntematon, paikannuksessa ei voida tukeutua olemassa olevaan infrastruktuuriin

3 INTACT päämäärä Tarkka sisätilapaikannus Kartta tuntemattomasta alueesta => Simultaneous Localization and Mapping (SLAM) Kontekstintunnistus (juoksee, ryömii, makaa) Vain taistelijan varusteissa olevilla laitteilla
 Vain taistelijan varusteissa olevilla")
4 INTACT haasteet Toteutetaan taistelijan varusteisiin kiinnitettävillä laitteilla Koko, hinta MEMS (micro-electro-mechanical sensors), suuria mittausvirheitä Yhden kameran käytön aiheuttama mittakaavaongelma Monimutkaiset kontekstit, esim. ryömiminen Absoluuttinen sijainti

5 INTACT ratkaisu Useamman sensorin mittausten integrointi 3 IMU:a (Inertial Measurement Unit) barometri Etäisyysmittaukset (ultraääni ) Innovatiiviset algoritmit SLAM-tekniikkaan Innovatiiviset algoritmit kontekstin ratkaisemiseen Digitaalinen TV absoluuttisen sijainnin ratkaisemiseen MIMU22BT Projektin sovellusympäristöksi on valittu sisätila, sillä se on haastava tilannetietoisuuden muodostamiseen. Kaikki kehitetyt menetelmät toimivat kuitenkin myös ulkona kaupunkiympäristössä.

6 Visuaalisensorit navigoinnissa Inertiasensoreiden virheiden korjaus SLAM yhdellä kameralla Visuaalinen gyroskooppi Visuaalinen odometri (Ruotsalainen, Vision-Aided Pedestrian Navigation for Challenging GNSS Environments, Doctoral Dissertation, 2013, TUT)

7 Visuaalinen gyroskooppi Kulkusuunta ja siirtymä peräkkäisten kuvien avulla Pakopiste (vanishing point) on piste, jossa yhdensuuntaiset viivat näyttävät leikkaavan Pakopisteiden paikat riippuvat Kameran parametreista (matriisi K) Kameran asennosta (matriisi R) [vx vy vz] = KR
 Kameran asennosta (matriisi R) [vx vy vz]")
8 Visuaalinen odometri Peräkkäisten kuvien samaa objektia esittävät pisteet x ja x riippuvat toisistaan K ja R kuten edellisessä kalvossa x =K RK -1 x+k t/z t kameran siirtymä Z etäisyys objektista (?) From calibration or image header Will be solved All other variables calculated with f and h and images Has to be known in advance and kept static
 From calibration or image header Will be solved All other variables calculated with")
9 Yhden kameran SLAM 1/2 Integroinnin pohjana Civera et al. 1-Point RANSAC SLAM Vahvuutena nopeus = tehostettu virheiden poisto Mittakaavan ratkaisuun käytetään menetelmää, joka ei toimi sisätiloissa, joissa vähän esineitä (esim. toimistot, käytävät) Yhdistetään omat visuaalialgortimit

10 Yhden kameran SLAM 2/2 Yksinkertainen SLAM FGI:n algoritmeilla, paikannustarkkuus 1.8 m Käännöksissä tarvitaan muiden sensorien mittauksia Tässä ratkaisussa vain yksinkertainen integrointi kuvista saaduille liikemittauksille Muiden sensorien integrointi Sonarilla apua kameran korkeuden määrittämiseen?

11 Perinteinen inertianavigointi Inertianavigointi vartaloon kiinnitetyillä sensoreilla ilman avusteita => virheet kasvavat nopeasti Jalkaan kiinnitetyillä sensoreilla saadaan huomattavasti parempia tuloksia

12 Korkeustieto barometrilla Korkeus mitatun paineen avulla Tarkkuus hyvä, kun ollaan samassa tilassa, eikä lämpötilan tai paineen muutoksia Jo ikkunan avaaminen aiheuttaa suuren virheen ø ö ç ç ç ç è æ ø ö ç ç è æ - = g kr p h p k T h 0 0 ) ( 1

13 Korkeustieto ultraäänen avulla Mittauksista voidaan erottaa portaat, jos se saadaan luotettavaksi ja portaan korkeus voidaan määrittää => korkeus

14 Testikampanja kesällä 2015
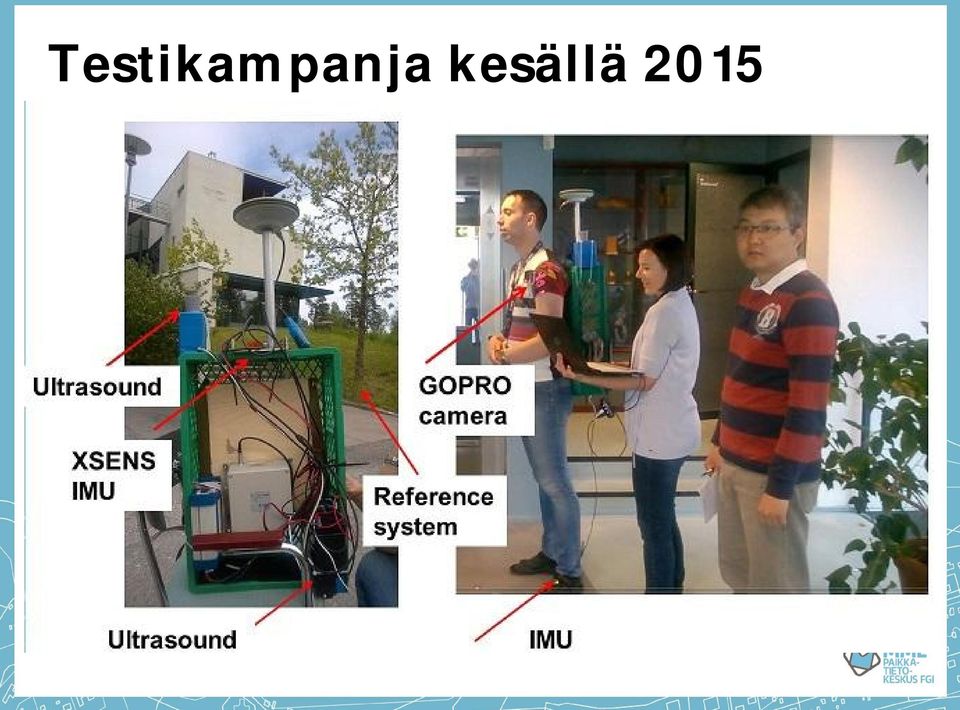
15 Käytetyt laitteet ja mittaukset SPAN Novatel IMU (Inertial Measurement Unit) Kiihtyvyysanturi, gyroskooppi Tactical grade, erittäin tarkka Hinta ~30k XSENS MEMS INS (Inertial Navigation System) Kiihtyvyysanturi, (gyroskooppi) Kompassi Barometri GoPro-kamera Kuvat 6 Hz 15
 Kiihtyvyysanturi, (gyroskooppi) Kompassi Barometri")
16 Northing [m] Ratkaisu referenssilaitteella => jopa näin kalliilla laitteella tulee 2.1m virhettä Easting [m] 16

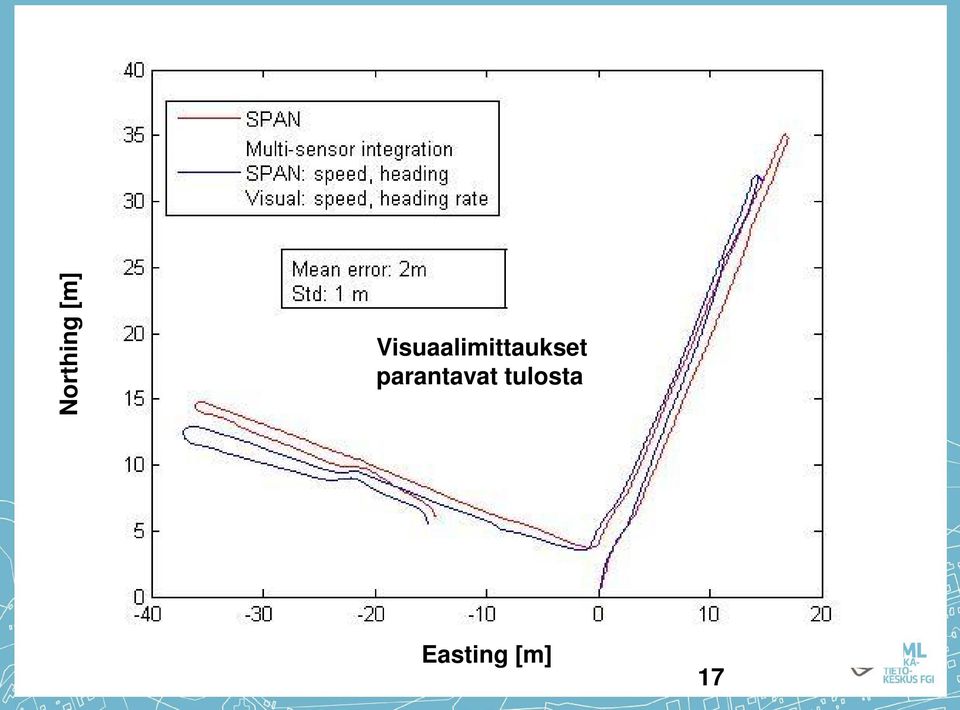
17 Northing [m] Visuaalimittaukset parantavat tulosta Easting [m] 17
18 Northing [m] Huonot MEMS IMU:n mittaukset huonontavat jopa kalliin laitteen tarkkuutta Easting [m] 18

19 Integrointialgoritmien vertailua Kalman-filtteri Partikkelifiltteri Integrointialgoritmin valinnalla ja suunnittelulla on suuri vaikutus lopputulokseen virheet tulee mallintaa huolella

20 Korkeus Ultrasonarilla korjattu korkeus, tärkeä erityisesti paine- /lämpötilavaihtelujen aikana

21 Kontekstintunnistus
22 Analyysi: Confusion Matrix Predicted Label Actual Label walking ascending stairs standing turning around walking very slowly walking slowly descending stairs jogging standing to crouch crouching ERRORS ERRORS (All values are percentage of total in-class samples) XSENS data (kiihtyvyys, asento, suunta, ilmanpaine)
23 Digitaalinen TV sisätiloissa Digitaalinen TV-signaali sisätiloissa Jatkossa tutkitaan signaalin kulkuaikaan (TOA) perustuvan paikannusratkaisun laatua
24 Intact tulosten hyödyntäminen Menetelmät soveltuvat taistelijoille kaupunkiolosuhteisiin sekä pelastus- ja poliisitoimen tarpeisiin Tieteelliset julkaisut Ruotsalainen et al. Monocular Visual SLAM for Tactical Situational Awareness, IPIN 2015 Ruotsalainen et al. Multi-sensor SLAM for Tactical Situational Awareness, ION ITM 2016 Seuraavat tärkeät tutkimusaiheet Sensorien virheiden mallinnus Adaptiivisuus Kontekstintunnistuksen jatkokehitys SLAM
25
Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT
 Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT Laura Ruotsalainen Paikkatietokeskus FGI, MML Matinen rahoitus: 83 912 3. tutkimusvuosi INTACT tarve Taistelijan tilannetietoisuus rakennetuissa
Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT Laura Ruotsalainen Paikkatietokeskus FGI, MML Matinen rahoitus: 83 912 3. tutkimusvuosi INTACT tarve Taistelijan tilannetietoisuus rakennetuissa
Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT
 Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT Laura Ruotsalainen Paikkatietokeskus FGI, MML Matinen rahoitus: 77 651 2. tutkimusvuosi INTACT tarve Taistelijan tilannetietoisuus rakennetuissa
Infrastruktuurista riippumaton taistelijan tilannetietoisuus INTACT Laura Ruotsalainen Paikkatietokeskus FGI, MML Matinen rahoitus: 77 651 2. tutkimusvuosi INTACT tarve Taistelijan tilannetietoisuus rakennetuissa
SAUMATON PAIKANNUS LAURA RUOTSALAINEN MAANMITTAUSPÄIVÄT
 SAUMATON PAIKANNUS LAURA RUOTSALAINEN MAANMITTAUSPÄIVÄT 22.3.2018 laura.ruotsalainen@nls.fi 1 SAUMATON PAIKANNUS Sijainnin tarkkuus, jatkuvuus, luotettavuus laura.ruotsalainen@nls.fi 2 GSA PAIKANNUKSEN
SAUMATON PAIKANNUS LAURA RUOTSALAINEN MAANMITTAUSPÄIVÄT 22.3.2018 laura.ruotsalainen@nls.fi 1 SAUMATON PAIKANNUS Sijainnin tarkkuus, jatkuvuus, luotettavuus laura.ruotsalainen@nls.fi 2 GSA PAIKANNUKSEN
Monisensoripaikannusta kaikissa ympäristöissä
 Monisensoripaikannusta kaikissa ympäristöissä Ratkaisuja Luonnosta - Lynetin tutkimuspäivä 4.10.2016 Sanna Kaasalainen Laura Ruotsalainen FGI:n Navigoinnin ja paikannuksen osasto Henkilöstö: 18 Tutkimus
Monisensoripaikannusta kaikissa ympäristöissä Ratkaisuja Luonnosta - Lynetin tutkimuspäivä 4.10.2016 Sanna Kaasalainen Laura Ruotsalainen FGI:n Navigoinnin ja paikannuksen osasto Henkilöstö: 18 Tutkimus
Anturit ja Arduino. ELEC-A4010 Sähköpaja Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka
 Anturit ja Arduino Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka Anturit ja Arduino Luennon sisältö 1. Taustaa 2. Antureiden ominaisuudet 3. AD-muunnos 4. Antureiden lukeminen Arduinolla
Anturit ja Arduino Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka Anturit ja Arduino Luennon sisältö 1. Taustaa 2. Antureiden ominaisuudet 3. AD-muunnos 4. Antureiden lukeminen Arduinolla
Maastokartta pistepilvenä Harri Kaartinen, Maanmittauspäivät
 Maastokartta pistepilvenä 22.3.2018 Harri Kaartinen, Maanmittauspäivät 2018 1 Sisältö Pistepilvi aineistolähteenä Aineiston keruu Aineistojen yhdistäminen ja käsittely Sovellukset 22.3.2018 Harri Kaartinen,
Maastokartta pistepilvenä 22.3.2018 Harri Kaartinen, Maanmittauspäivät 2018 1 Sisältö Pistepilvi aineistolähteenä Aineiston keruu Aineistojen yhdistäminen ja käsittely Sovellukset 22.3.2018 Harri Kaartinen,
Älyä metsäkoneeseen 3D-laserkeilauksella Heikki Hyyti, Konenäköpäivät, #Reset17
 Älyä metsäkoneeseen 3D-laserkeilauksella Heikki Hyyti, Konenäköpäivät, #Reset17 Älyä metsäkoneeseen 3D-laserkeilauksella Mitä tehdään ja miksi? COMBAT/Pointcloud -hanke Metsäkoneiden kehityksen haasteita
Älyä metsäkoneeseen 3D-laserkeilauksella Heikki Hyyti, Konenäköpäivät, #Reset17 Älyä metsäkoneeseen 3D-laserkeilauksella Mitä tehdään ja miksi? COMBAT/Pointcloud -hanke Metsäkoneiden kehityksen haasteita
Tulevaisuuden autonomiset laivat. Mika Hyvönen Yliopistotutkija, TkT
 Tulevaisuuden autonomiset laivat Mika Hyvönen Yliopistotutkija, TkT Mihin autonomisia laivoja tarvitaan? Energiatehokkuus Autonominen laiva mahdollistaa koko laivan uudelleen suunnittelun Minimoidut miehistötilat
Tulevaisuuden autonomiset laivat Mika Hyvönen Yliopistotutkija, TkT Mihin autonomisia laivoja tarvitaan? Energiatehokkuus Autonominen laiva mahdollistaa koko laivan uudelleen suunnittelun Minimoidut miehistötilat
TTY Mittausten koekenttä. Käyttö. Sijainti
 TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
Kansallinen maastotietokanta. KMTK Kuntien tuotantoprosessit: Selvitys mobiilikartoitusmenetelmistä
 Kansallinen maastotietokanta KMTK Kuntien tuotantoprosessit: Selvitys mobiilikartoitusmenetelmistä Projektin selvitys 1 Sisältö 1 YLEISTÄ... 2 1.1 LYHENTEISTÄ JA TERMEISTÄ... 2 2 YLEISTÄ MOBIILIKARTOITUSJÄRJESTELMISTÄ...
Kansallinen maastotietokanta KMTK Kuntien tuotantoprosessit: Selvitys mobiilikartoitusmenetelmistä Projektin selvitys 1 Sisältö 1 YLEISTÄ... 2 1.1 LYHENTEISTÄ JA TERMEISTÄ... 2 2 YLEISTÄ MOBIILIKARTOITUSJÄRJESTELMISTÄ...
FINNREF- TUKIASEMAVERKKO/PAIKANNUS- PALVELU JA SEN KEHITTÄMINEN
 FINNREF- TUKIASEMAVERKKO/PAIKANNUS- PALVELU JA SEN KEHITTÄMINEN 22.3.2018 Maanmittauspäivät 2018 Marko Ollikainen 1 Esityksen sisältö: - Taustaa - Nyt - Tulevaisuutta FINNREF TUKIASEMAVERKKO JA PAIKANNUSPALVELU
FINNREF- TUKIASEMAVERKKO/PAIKANNUS- PALVELU JA SEN KEHITTÄMINEN 22.3.2018 Maanmittauspäivät 2018 Marko Ollikainen 1 Esityksen sisältö: - Taustaa - Nyt - Tulevaisuutta FINNREF TUKIASEMAVERKKO JA PAIKANNUSPALVELU
DIGIBONUSTEHTÄVÄ: MPKJ NCC INDUSTRY OY LOPPURAPORTTI
 DIGIBONUSTEHTÄVÄ: MPKJ NCC INDUSTRY OY LOPPURAPORTTI Tekijä: Marko Olli 16.10.2018 Sisällys 1 Johdanto...3 2 Hankkeen tavoitteet ja vaikuttavuus...3 3 Laitteisto ja mittaustarkkuus...3 4 Pilotointi ja
DIGIBONUSTEHTÄVÄ: MPKJ NCC INDUSTRY OY LOPPURAPORTTI Tekijä: Marko Olli 16.10.2018 Sisällys 1 Johdanto...3 2 Hankkeen tavoitteet ja vaikuttavuus...3 3 Laitteisto ja mittaustarkkuus...3 4 Pilotointi ja
DirAir Oy:n tuloilmaikkunaventtiilien mittaukset 30.11.2012
 Tampereen teknillinen yliopisto Teknisen suunnittelun laitos Pentti Saarenrinne Tilaaja: DirAir Oy Kuoppakatu 4 1171 Riihimäki Mittausraportti: DirAir Oy:n tuloilmaikkunaventtiilien mittaukset 3.11.212
Tampereen teknillinen yliopisto Teknisen suunnittelun laitos Pentti Saarenrinne Tilaaja: DirAir Oy Kuoppakatu 4 1171 Riihimäki Mittausraportti: DirAir Oy:n tuloilmaikkunaventtiilien mittaukset 3.11.212
Garmin GPSmap 60CSx -laite
 Garmin GPSmap 60CSx -laite GPS koulutus 20.6.2007 PAIKKATIETOPAJA -hanke Näppäimet ja laitteen osat Power - virta päälle/pois, taustavalon säätö Keinunäppäin valitse vaihtoehtoja / kenttiä, syötä tietoja,
Garmin GPSmap 60CSx -laite GPS koulutus 20.6.2007 PAIKKATIETOPAJA -hanke Näppäimet ja laitteen osat Power - virta päälle/pois, taustavalon säätö Keinunäppäin valitse vaihtoehtoja / kenttiä, syötä tietoja,
Autonomisen liikkuvan koneen teknologiat. Hannu Mäkelä Navitec Systems Oy
 Autonomisen liikkuvan koneen teknologiat Hannu Mäkelä Navitec Systems Oy Autonomisuuden edellytykset itsenäinen toiminta ympäristön havainnointi ja mittaus liikkuminen ja paikannus toiminta mittausten
Autonomisen liikkuvan koneen teknologiat Hannu Mäkelä Navitec Systems Oy Autonomisuuden edellytykset itsenäinen toiminta ympäristön havainnointi ja mittaus liikkuminen ja paikannus toiminta mittausten
VAISALAN STATOSKOOPPIEN KÄYTTÖÖN PERUSTUVASTA KORKEUDEN-
 Q 16.1/21/73/1 Seppo Elo 1973-11-16 GEOLOGINEN TUTKIMUSLAITOS Geofysiikan osasto Painovoimapisteiden korkeuden mittauksesta statoskoopeilla VAISALAN STATOSKOOPPIEN KÄYTTÖÖN PERUSTUVASTA KORKEUDEN- MÄARITYKSESTA
Q 16.1/21/73/1 Seppo Elo 1973-11-16 GEOLOGINEN TUTKIMUSLAITOS Geofysiikan osasto Painovoimapisteiden korkeuden mittauksesta statoskoopeilla VAISALAN STATOSKOOPPIEN KÄYTTÖÖN PERUSTUVASTA KORKEUDEN- MÄARITYKSESTA
Satelliittipaikannus
 Kolme maailmalaajuista järjestelmää 1. GPS (USAn puolustusministeriö) Täydessä laajuudessaan toiminnassa v. 1994. http://www.navcen.uscg.gov/gps/default.htm 2. GLONASS (Venäjän hallitus) Ilmeisesti 11
Kolme maailmalaajuista järjestelmää 1. GPS (USAn puolustusministeriö) Täydessä laajuudessaan toiminnassa v. 1994. http://www.navcen.uscg.gov/gps/default.htm 2. GLONASS (Venäjän hallitus) Ilmeisesti 11
Mobiilikartoitusdatan prosessointi ja hyödyntäminen
 Mobiilikartoitusdatan prosessointi ja hyödyntäminen Alkuprosessointi - Vaiheet 1. Ajoradan jälkilaskenta 2. Havaintodatan korjaus 3. RGB-värjäys 4. Tukipisteiden käyttö Ajoradan jälkilaskenta Korjataan
Mobiilikartoitusdatan prosessointi ja hyödyntäminen Alkuprosessointi - Vaiheet 1. Ajoradan jälkilaskenta 2. Havaintodatan korjaus 3. RGB-värjäys 4. Tukipisteiden käyttö Ajoradan jälkilaskenta Korjataan
LX 70. Ominaisuuksien mittaustulokset 1-kerroksinen 2-kerroksinen. Fyysiset ominaisuudet, nimellisarvot. Kalvon ominaisuudet
 LX 70 % Läpäisy 36 32 % Absorptio 30 40 % Heijastus 34 28 % Läpäisy 72 65 % Heijastus ulkopuoli 9 16 % Heijastus sisäpuoli 9 13 Emissiivisyys.77.77 Auringonsuojakerroin.54.58 Auringonsäteilyn lämmönsiirtokerroin.47.50
LX 70 % Läpäisy 36 32 % Absorptio 30 40 % Heijastus 34 28 % Läpäisy 72 65 % Heijastus ulkopuoli 9 16 % Heijastus sisäpuoli 9 13 Emissiivisyys.77.77 Auringonsuojakerroin.54.58 Auringonsäteilyn lämmönsiirtokerroin.47.50
2016/06/21 13:27 1/10 Laskentatavat
 2016/06/21 13:27 1/10 Laskentatavat Laskentatavat Yleistä - vaakageometrian suunnittelusta Paalu Ensimmäinen paalu Ensimmäisen paalun tartuntapiste asetetaan automaattisesti 0.0:aan. Tämä voidaan muuttaa
2016/06/21 13:27 1/10 Laskentatavat Laskentatavat Yleistä - vaakageometrian suunnittelusta Paalu Ensimmäinen paalu Ensimmäisen paalun tartuntapiste asetetaan automaattisesti 0.0:aan. Tämä voidaan muuttaa
Trimblen mobiilikartoitusportfolio. Trimble MX9 Trimble MX2 Trimble MX7
 Trimblen mobiilikartoitusportfolio Trimble MX9 Trimble MX2 Trimble MX7 Suuret projektit Vaativat kohteet Keskikokoiset projektit Kartoitus ja mallinnus Dokumentointi ja omaisuudenhallinta Panoraamakuva-aineisto
Trimblen mobiilikartoitusportfolio Trimble MX9 Trimble MX2 Trimble MX7 Suuret projektit Vaativat kohteet Keskikokoiset projektit Kartoitus ja mallinnus Dokumentointi ja omaisuudenhallinta Panoraamakuva-aineisto
Koesuunnitelma. Lennokin paikan määrittäminen kiihtyvyys datan avulla. Jani Mäkelä, Jussi Tamminen, Tuomas Keski-Heikkilä ja Markus Laitinen
 Koesuunnitelma Lennokin paikan määrittäminen kiihtyvyys datan avulla Jani Mäkelä, Jussi Tamminen, Tuomas Keski-Heikkilä ja Markus Laitinen Sisällysluettelo 1 Johdanto... 2 2 Tutkimusaiheeseen liittyvää
Koesuunnitelma Lennokin paikan määrittäminen kiihtyvyys datan avulla Jani Mäkelä, Jussi Tamminen, Tuomas Keski-Heikkilä ja Markus Laitinen Sisällysluettelo 1 Johdanto... 2 2 Tutkimusaiheeseen liittyvää
Matematiikka ja teknologia, kevät 2011
 Matematiikka ja teknologia, kevät 2011 Peter Hästö 13. tammikuuta 2011 Matemaattisten tieteiden laitos Tarkoitus Kurssin tarkoituksena on tutustuttaa ja käydä läpi eräisiin teknologisiin sovelluksiin liittyvää
Matematiikka ja teknologia, kevät 2011 Peter Hästö 13. tammikuuta 2011 Matemaattisten tieteiden laitos Tarkoitus Kurssin tarkoituksena on tutustuttaa ja käydä läpi eräisiin teknologisiin sovelluksiin liittyvää
Stereopaikannusjärjestelmän tarkkuus (3 op)
") Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Miehittämättömän lennokin ottamien ilmakuvien käyttö energiakäyttöön soveltuvien biomassojen määrän nopeassa arvioinnissa
 Miehittämättömän lennokin ottamien ilmakuvien käyttö energiakäyttöön soveltuvien biomassojen määrän nopeassa arvioinnissa Anna Lopatina, Itä-Suomen yliopisto, Metsätieteiden osasto, Anna.lopatina@uef.fi
Miehittämättömän lennokin ottamien ilmakuvien käyttö energiakäyttöön soveltuvien biomassojen määrän nopeassa arvioinnissa Anna Lopatina, Itä-Suomen yliopisto, Metsätieteiden osasto, Anna.lopatina@uef.fi
TIIVISTELMÄRAPORTTI (SUMMARY REPORT)
") 2013/MAT827 ISSN 1797-3457 (verkkojulkaisu) ISBN (PDF) 978-951-25-2421-1 TIIVISTELMÄRAPORTTI (SUMMARY REPORT) MIEHITTÄMÄTTÖMÄN VEDENALAISEN LAITTEEN NAVIGOINTI Jarmo Takala, Jussi Collin, Jarkko Tuomi
2013/MAT827 ISSN 1797-3457 (verkkojulkaisu) ISBN (PDF) 978-951-25-2421-1 TIIVISTELMÄRAPORTTI (SUMMARY REPORT) MIEHITTÄMÄTTÖMÄN VEDENALAISEN LAITTEEN NAVIGOINTI Jarmo Takala, Jussi Collin, Jarkko Tuomi
Talvikunnossapidon laadun seuranta
 Talvikunnossapidon laadun seuranta Taisto Haavasoja Sisällys kitka liukkauden mittarina kitkan mittauksen perusteet kiihtyvyyteen perustuvat mittarit µtec Friction Meter MµMS Mobile Friction Measurement
Talvikunnossapidon laadun seuranta Taisto Haavasoja Sisällys kitka liukkauden mittarina kitkan mittauksen perusteet kiihtyvyyteen perustuvat mittarit µtec Friction Meter MµMS Mobile Friction Measurement
5 syytä hyödyntää ensiluokkaista paikannustarkkuutta maastotyöskentelyssä
 5 syytä hyödyntää ensiluokkaista paikannustarkkuutta maastotyöskentelyssä Taskukokoinen, maastokelpoinen Trimble R1 GNSS -vastaanotin mahdollistaa ammattitasoisen paikkatiedonkeruun. Kun R1 yhdistetään
5 syytä hyödyntää ensiluokkaista paikannustarkkuutta maastotyöskentelyssä Taskukokoinen, maastokelpoinen Trimble R1 GNSS -vastaanotin mahdollistaa ammattitasoisen paikkatiedonkeruun. Kun R1 yhdistetään
Sisältö. Työn lähtökohta ja tavoitteet Lyhyt kertaus prosessista Käytetyt menetelmät Työn kulku Tulokset Ongelmat ja jatkokehitys
 Loppuraportti Sisältö Työn lähtökohta ja tavoitteet Lyhyt kertaus prosessista Käytetyt menetelmät Työn kulku Tulokset Ongelmat ja jatkokehitys Työn lähtökohta ja tavoitteet Voimalaitoskattiloiden tulipesässä
Loppuraportti Sisältö Työn lähtökohta ja tavoitteet Lyhyt kertaus prosessista Käytetyt menetelmät Työn kulku Tulokset Ongelmat ja jatkokehitys Työn lähtökohta ja tavoitteet Voimalaitoskattiloiden tulipesässä
Metsäkoneiden sensoritekniikka kehittyy. Heikki Hyyti, Aalto-yliopisto
 Metsäkoneiden sensoritekniikka kehittyy, Metsäkoneiden sensoritekniikka kehittyy Miksi uutta sensoritekniikkaa? Tarkka paikkatieto metsässä Metsäkoneen ja puomin asennon mittaus Konenäkö Laserkeilaus Tietolähteiden
Metsäkoneiden sensoritekniikka kehittyy, Metsäkoneiden sensoritekniikka kehittyy Miksi uutta sensoritekniikkaa? Tarkka paikkatieto metsässä Metsäkoneen ja puomin asennon mittaus Konenäkö Laserkeilaus Tietolähteiden
Pintasääasemaverkon vikadiagnostiikkaa DADAssa
 TEKNILLINEN KORKEAKOULU Systeemitekniikan laboratorio Pintasääasemaverkon vikadiagnostiikkaa DADAssa Vesa Hasu DADA? 2 Pintasääasemaverkon vikadiagnostiikkaa... Yleistä - DADA DADA: Datafuusio- ja diagnostiikkamenetelmien
TEKNILLINEN KORKEAKOULU Systeemitekniikan laboratorio Pintasääasemaverkon vikadiagnostiikkaa DADAssa Vesa Hasu DADA? 2 Pintasääasemaverkon vikadiagnostiikkaa... Yleistä - DADA DADA: Datafuusio- ja diagnostiikkamenetelmien
Kojemeteorologia (53695) Laskuharjoitus 1
 Laskuharjoitus 1") Kojemeteorologia (53695) Laskuharjoitus 1 Risto Taipale 20.9.2013 1 Tehtävä 1 Erään lämpömittarin vertailu kalibrointistandardiin antoi keskimääräiseksi eroksi standardista 0,98 C ja eron keskihajonnaksi
Kojemeteorologia (53695) Laskuharjoitus 1 Risto Taipale 20.9.2013 1 Tehtävä 1 Erään lämpömittarin vertailu kalibrointistandardiin antoi keskimääräiseksi eroksi standardista 0,98 C ja eron keskihajonnaksi
KONTTIJARVEN ALUEEN KIINTOPISTEET JA KAIRAREIKIEN KOORDINAATIT KKJ-KOORDINAATISTOSSA
 RAPORTTI 04013522 12lUMVl2001 Urpo Vihreapuu Jakelu OKMElOutokumpu 1 kpl OKMElRovaniemi 2 kpl KONTTIJARVEN ALUEEN KIINTOPISTEET JA KAIRAREIKIEN KOORDINAATIT KKJ-KOORDINAATISTOSSA Sijainti 1:50 000 Avainsanat:
RAPORTTI 04013522 12lUMVl2001 Urpo Vihreapuu Jakelu OKMElOutokumpu 1 kpl OKMElRovaniemi 2 kpl KONTTIJARVEN ALUEEN KIINTOPISTEET JA KAIRAREIKIEN KOORDINAATIT KKJ-KOORDINAATISTOSSA Sijainti 1:50 000 Avainsanat:
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää
 Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
Pitkän kantaman aktiivinen hyperspektraalinen laserkeilaus
 Pitkän kantaman aktiivinen hyperspektraalinen laserkeilaus MATINE:n Tutkimusseminaari, 18.11.2015 Helsinki Sanna Kaasalainen, Olli Nevalainen, Teemu Hakala Paikkatietokeskus Sisällys Taustaa Multispektraaliset
Pitkän kantaman aktiivinen hyperspektraalinen laserkeilaus MATINE:n Tutkimusseminaari, 18.11.2015 Helsinki Sanna Kaasalainen, Olli Nevalainen, Teemu Hakala Paikkatietokeskus Sisällys Taustaa Multispektraaliset
Numeeriset menetelmät TIEA381. Luento 8. Kirsi Valjus. Jyväskylän yliopisto. Luento 8 () Numeeriset menetelmät / 35
 Numeeriset menetelmät / 35") Numeeriset menetelmät TIEA381 Luento 8 Kirsi Valjus Jyväskylän yliopisto Luento 8 () Numeeriset menetelmät 11.4.2013 1 / 35 Luennon 8 sisältö Interpolointi ja approksimointi Funktion approksimointi Tasainen
Numeeriset menetelmät TIEA381 Luento 8 Kirsi Valjus Jyväskylän yliopisto Luento 8 () Numeeriset menetelmät 11.4.2013 1 / 35 Luennon 8 sisältö Interpolointi ja approksimointi Funktion approksimointi Tasainen
LYTH-CONS CONSISTENCY TRANSMITTER
 LYTH-CONS CONSISTENCY TRANSMITTER LYTH-INSTRUMENT OY has generate new consistency transmitter with blade-system to meet high technical requirements in Pulp&Paper industries. Insurmountable advantages are
LYTH-CONS CONSISTENCY TRANSMITTER LYTH-INSTRUMENT OY has generate new consistency transmitter with blade-system to meet high technical requirements in Pulp&Paper industries. Insurmountable advantages are
 MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta
 Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta Sanna Kaasalainen Kaukokartoituksen ja Fotogrammetrian Osasto Ilmastonmuutos ja ääriarvot 13.9.2012 Ympäristön Aktiivinen
Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta Sanna Kaasalainen Kaukokartoituksen ja Fotogrammetrian Osasto Ilmastonmuutos ja ääriarvot 13.9.2012 Ympäristön Aktiivinen
Teknillinen tiedekunta, matematiikan jaos Numeeriset menetelmät
 Numeeriset menetelmät 1. välikoe, 14.2.2009 1. Määrää matriisin 1 1 a 1 3 a a 4 a a 2 1 LU-hajotelma kaikille a R. Ratkaise LU-hajotelmaa käyttäen yhtälöryhmä Ax = b, missä b = [ 1 3 2a 2 a + 3] T. 2.
Numeeriset menetelmät 1. välikoe, 14.2.2009 1. Määrää matriisin 1 1 a 1 3 a a 4 a a 2 1 LU-hajotelma kaikille a R. Ratkaise LU-hajotelmaa käyttäen yhtälöryhmä Ax = b, missä b = [ 1 3 2a 2 a + 3] T. 2.
Laitetekniset vaatimukset ammattimaiselle dronetoiminnalle. Sakari Mäenpää
 Laitetekniset vaatimukset ammattimaiselle dronetoiminnalle Sakari Mäenpää Lopputulokseen vaikuttavat tekijät Kalusto Olosuhteet Ammattitaito Kuvauskohde Hyvä suunnitelma = onnistunut lopputulos Olosuhteet,
Laitetekniset vaatimukset ammattimaiselle dronetoiminnalle Sakari Mäenpää Lopputulokseen vaikuttavat tekijät Kalusto Olosuhteet Ammattitaito Kuvauskohde Hyvä suunnitelma = onnistunut lopputulos Olosuhteet,
Ene-58.4139 LVI-tekniikan mittaukset ILMAN TILAVUUSVIRRAN MITTAUS TYÖOHJE
 Ene-58.4139 LVI-tekniikan mittaukset ILMAN TILAVUUSVIRRAN MITTAUS TYÖOHJE Aalto yliopisto LVI-tekniikka 2013 SISÄLLYSLUETTELO TILAVUUSVIRRAN MITTAUS...2 1 HARJOITUSTYÖN TAVOITTEET...2 2 MITTAUSJÄRJESTELY
Ene-58.4139 LVI-tekniikan mittaukset ILMAN TILAVUUSVIRRAN MITTAUS TYÖOHJE Aalto yliopisto LVI-tekniikka 2013 SISÄLLYSLUETTELO TILAVUUSVIRRAN MITTAUS...2 1 HARJOITUSTYÖN TAVOITTEET...2 2 MITTAUSJÄRJESTELY
S09 04 Kohteiden tunnistaminen 3D datasta
 AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
Työ 21 Valon käyttäytyminen rajapinnoilla. Työvuoro 40 pari 1
 Työ 21 Valon käyttäytyminen rajapinnoilla Työvuoro 40 pari 1 Tero Marttila Joel Pirttimaa TLT 78949E EST 78997S Selostuksen laati Tero Marttila Mittaukset suoritettu 12.11.2012 Selostus palautettu 19.11.2012
Työ 21 Valon käyttäytyminen rajapinnoilla Työvuoro 40 pari 1 Tero Marttila Joel Pirttimaa TLT 78949E EST 78997S Selostuksen laati Tero Marttila Mittaukset suoritettu 12.11.2012 Selostus palautettu 19.11.2012
Johdatus mobiilikartoituksen maailmaan. Joni Salo, Geotrim Oy
 Johdatus mobiilikartoituksen maailmaan Joni Salo, Geotrim Oy 19.9.2018 Luennot tänään 9.30-10.00 Johdatus mobiilikartoitukseen 10.00 10.30 Trimblen mobiilikartoitusratkaisut ja uusi MX9 10.30 13.00 Laitteistodemot
Johdatus mobiilikartoituksen maailmaan Joni Salo, Geotrim Oy 19.9.2018 Luennot tänään 9.30-10.00 Johdatus mobiilikartoitukseen 10.00 10.30 Trimblen mobiilikartoitusratkaisut ja uusi MX9 10.30 13.00 Laitteistodemot
Luento 10: Optinen 3-D mittaus ja laserkeilaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta
 Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Algoritmi I kuvioiden ja niille johtavien ajourien erottelu. Metsätehon tuloskalvosarja 7a/2018 LIITE 1 Timo Melkas Kirsi Riekki Metsäteho Oy
 Algoritmi I kuvioiden ja niille johtavien ajourien erottelu Metsätehon tuloskalvosarja 7a/2018 LIITE 1 Timo Melkas Kirsi Riekki Metsäteho Oy Algoritmi I kuvioiden ja niille johtavien ajourien erottelu
Algoritmi I kuvioiden ja niille johtavien ajourien erottelu Metsätehon tuloskalvosarja 7a/2018 LIITE 1 Timo Melkas Kirsi Riekki Metsäteho Oy Algoritmi I kuvioiden ja niille johtavien ajourien erottelu
Kojemeteorologia. Sami Haapanala syksy Fysiikan laitos, Ilmakehätieteiden osasto
 Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Yläilmakehän luotaukset Synoptiset säähavainnot antavat tietoa meteorologisista parametrestä vain maan pinnalla Ilmakehän
Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Yläilmakehän luotaukset Synoptiset säähavainnot antavat tietoa meteorologisista parametrestä vain maan pinnalla Ilmakehän
Luento 5: Stereoskooppinen mittaaminen
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Vinkkejä sään ennakointiin ja sään muutosten havainnointiin
 LASKUREISSUN SÄÄ Vinkkejä sään ennakointiin ja sään muutosten havainnointiin Mikko Routala Ex -meteorologi, nykyinen harrastaja Vapaalaskuiltamat 2018 You don't need a weatherman to know which way the
LASKUREISSUN SÄÄ Vinkkejä sään ennakointiin ja sään muutosten havainnointiin Mikko Routala Ex -meteorologi, nykyinen harrastaja Vapaalaskuiltamat 2018 You don't need a weatherman to know which way the
Maastolaserkeilauksen mahdollisuudet metsävaratiedon hankinnassa ja puunkorjuussa. Harri Kaartinen , FOREST BIG DATA -hankkeen tulosseminaari
 Maastolaserkeilauksen mahdollisuudet metsävaratiedon hankinnassa ja puunkorjuussa Harri Kaartinen 9.3.2016, FOREST BIG DATA -hankkeen tulosseminaari Maastolaserkeilaus Staattinen laserkeilaus, keilain
Maastolaserkeilauksen mahdollisuudet metsävaratiedon hankinnassa ja puunkorjuussa Harri Kaartinen 9.3.2016, FOREST BIG DATA -hankkeen tulosseminaari Maastolaserkeilaus Staattinen laserkeilaus, keilain
PIEKSÄMÄEN MELUSELVITYKSEN MELUMITTAUKSET
 FCG Finnish Consulting Group Oy Keski-Savon ympäristötoimi PIEKSÄMÄEN MELUSELVITYKSEN MELUMITTAUKSET Raportti 171905-P11889 30.11.2010 FCG Finnish Consulting Group Oy Raportti I 30.11.2010 SISÄLLYSLUETTELO
FCG Finnish Consulting Group Oy Keski-Savon ympäristötoimi PIEKSÄMÄEN MELUSELVITYKSEN MELUMITTAUKSET Raportti 171905-P11889 30.11.2010 FCG Finnish Consulting Group Oy Raportti I 30.11.2010 SISÄLLYSLUETTELO
Työhön kuuluu sähköistää kuvien mukainen asennus täyteen käyttökuntoon. Työssä ei saa tehdä jännitetyötä eikä lähialueella työskentelyä.
 TYÖSELOSTUS Kohde Taitaja 2015 sähköasennus, semifinaali. Laajuus ja työskentelytavat Työhön kuuluu sähköistää kuvien mukainen asennus täyteen käyttökuntoon. Työssä ei saa tehdä jännitetyötä eikä lähialueella
TYÖSELOSTUS Kohde Taitaja 2015 sähköasennus, semifinaali. Laajuus ja työskentelytavat Työhön kuuluu sähköistää kuvien mukainen asennus täyteen käyttökuntoon. Työssä ei saa tehdä jännitetyötä eikä lähialueella
Integrointialgoritmit molekyylidynamiikassa
 Integrointialgoritmit molekyylidynamiikassa Markus Ovaska 28.11.2008 Esitelmän kulku MD-simulaatiot yleisesti Integrointialgoritmit: mitä integroidaan ja miten? Esimerkkejä eri algoritmeista Hyvän algoritmin
Integrointialgoritmit molekyylidynamiikassa Markus Ovaska 28.11.2008 Esitelmän kulku MD-simulaatiot yleisesti Integrointialgoritmit: mitä integroidaan ja miten? Esimerkkejä eri algoritmeista Hyvän algoritmin
Laserin ja kaikuluotauksen yhdistäminen
 Laserin ja kaikuluotauksen yhdistäminen Jani Pötrönen Meritaito Oy Laserkeilaus- ja korkeusmalliseminaari 8.10.2010 13.10.2010 www.meritaito.fi 1 Meritaito Oy 1.1.2010 Merenkulkulaitos lakkasi olemasta
Laserin ja kaikuluotauksen yhdistäminen Jani Pötrönen Meritaito Oy Laserkeilaus- ja korkeusmalliseminaari 8.10.2010 13.10.2010 www.meritaito.fi 1 Meritaito Oy 1.1.2010 Merenkulkulaitos lakkasi olemasta
Automaattinen betonin ilmamäärämittaus
 Automaattinen betonin ilmamäärämittaus 1.11.2017 DI, Projektityöntekijä Aalto-yliopisto Teemu Ojala Betonitutkimusseminaari 2017 Messukeskus, Kokoustamo Esitelmän sisältö 1. Tausta ja tutkimustarve 2.
Automaattinen betonin ilmamäärämittaus 1.11.2017 DI, Projektityöntekijä Aalto-yliopisto Teemu Ojala Betonitutkimusseminaari 2017 Messukeskus, Kokoustamo Esitelmän sisältö 1. Tausta ja tutkimustarve 2.
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Leica Sprinter Siitä vain... Paina nappia
 Sprinter Siitä vain... Paina nappia Sprinter 50 Tähtää, paina nappia, lue tulos Pölyn ja veden kestävä Kompakti ja kevyt muotoilu Virheettömät korkeuden ja etäisyyden lukemat Toiminnot yhdellä painikkeella
Sprinter Siitä vain... Paina nappia Sprinter 50 Tähtää, paina nappia, lue tulos Pölyn ja veden kestävä Kompakti ja kevyt muotoilu Virheettömät korkeuden ja etäisyyden lukemat Toiminnot yhdellä painikkeella
KMTK lentoestetyöpaja - Osa 2
 KMTK lentoestetyöpaja - Osa 2 Veijo Pätynen 18.10.2016 Pasila YHTEISTYÖSSÄ: Ilmailun paikkatiedon hallintamalli Ilmailun paikkatiedon hallintamalli (v0.9 4.3.2016) 4.4 Maanmittauslaitoksen rooli ja vastuut...
KMTK lentoestetyöpaja - Osa 2 Veijo Pätynen 18.10.2016 Pasila YHTEISTYÖSSÄ: Ilmailun paikkatiedon hallintamalli Ilmailun paikkatiedon hallintamalli (v0.9 4.3.2016) 4.4 Maanmittauslaitoksen rooli ja vastuut...
Hissimatkustajien automaattinen tunnistaminen. Johan Backlund
 Hissimatkustajien automaattinen tunnistaminen Johan Backlund Johdanto Hissien historia pitkä Ensimmäiset maininnat voidaan jäljittää Rooman valtakuntaan Matkustaja hissien synty 1800-luvun puolessavälissä
Hissimatkustajien automaattinen tunnistaminen Johan Backlund Johdanto Hissien historia pitkä Ensimmäiset maininnat voidaan jäljittää Rooman valtakuntaan Matkustaja hissien synty 1800-luvun puolessavälissä
Paikkatiedon hyödyntäminen älykkään sairaalan ICTympäristössä
 Paikkatiedon hyödyntäminen älykkään sairaalan ICTympäristössä Jouko Kuisma Sairaalatekniikan päivät Hankejohtaja, Fujitsu Finland Helsinki 12.2.2014 jouko.kuisma@fi.fujitsu.com Jokapaikan tietotekniikka?
Paikkatiedon hyödyntäminen älykkään sairaalan ICTympäristössä Jouko Kuisma Sairaalatekniikan päivät Hankejohtaja, Fujitsu Finland Helsinki 12.2.2014 jouko.kuisma@fi.fujitsu.com Jokapaikan tietotekniikka?
Luento 6 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Laskelmasuunnistus älylaitteen sisätilapaikannuksessa
 Laskelmasuunnistus älylaitteen sisätilapaikannuksessa Jarno Leppänen Kandidaatintutkielma HELSINGIN YLIOPISTO Tietojenkäsittelytieteen laitos Helsinki, 7. toukokuuta 2014 HELSINGIN YLIOPISTO HELSINGFORS
Laskelmasuunnistus älylaitteen sisätilapaikannuksessa Jarno Leppänen Kandidaatintutkielma HELSINGIN YLIOPISTO Tietojenkäsittelytieteen laitos Helsinki, 7. toukokuuta 2014 HELSINGIN YLIOPISTO HELSINGFORS
Teknillinen korkeakoulu T-76.115 Tietojenkäsittelyopin ohjelmatyö. Testitapaukset - Koordinaattieditori
 Testitapaukset - Koordinaattieditori Sisällysluettelo 1. Johdanto...3 2. Testattava järjestelmä...4 3. Toiminnallisuuden testitapaukset...5 3.1 Uuden projektin avaaminen...5 3.2 vaa olemassaoleva projekti...6
Testitapaukset - Koordinaattieditori Sisällysluettelo 1. Johdanto...3 2. Testattava järjestelmä...4 3. Toiminnallisuuden testitapaukset...5 3.1 Uuden projektin avaaminen...5 3.2 vaa olemassaoleva projekti...6
Seurantalaskimen simulointi- ja suorituskykymallien vertailu (valmiin työn esittely) Joona Karjalainen
 Joona Karjalainen") Seurantalaskimen simulointi- ja suorituskykymallien vertailu (valmiin työn esittely) Joona Karjalainen 08.09.2014 Ohjaaja: DI Mikko Harju Valvoja: Prof. Kai Virtanen Työn saa tallentaa ja julkistaa Aalto-yliopiston
Seurantalaskimen simulointi- ja suorituskykymallien vertailu (valmiin työn esittely) Joona Karjalainen 08.09.2014 Ohjaaja: DI Mikko Harju Valvoja: Prof. Kai Virtanen Työn saa tallentaa ja julkistaa Aalto-yliopiston
Seminaariesitelmä. Channel Model Integration into a Direct Sequence CDMA Radio Network Simulator
 S-38.310 Tietoverkkotekniikan diplomityöseminaari Seminaariesitelmä Channel Model Integration into a Direct Sequence CDMA Radio Network Simulator Teemu Karhima 12.8.2002 Koostuu kahdesta eri kokonaisuudesta:
S-38.310 Tietoverkkotekniikan diplomityöseminaari Seminaariesitelmä Channel Model Integration into a Direct Sequence CDMA Radio Network Simulator Teemu Karhima 12.8.2002 Koostuu kahdesta eri kokonaisuudesta:
Juha Korhonen, DI Erikoistuva fyysikko, HYKS Syöpäkeskus Väitöskirja-projekti: MRI-based radiotherapy
 Sädehoitopäivät, 16-17.4.2015, Turku MRI-pohjainen sädehoito Juha Korhonen, DI Erikoistuva fyysikko, HYKS Syöpäkeskus Väitöskirja-projekti: MRI-based radiotherapy Sädehoidon työvaiheet ja kuvien käyttö
Sädehoitopäivät, 16-17.4.2015, Turku MRI-pohjainen sädehoito Juha Korhonen, DI Erikoistuva fyysikko, HYKS Syöpäkeskus Väitöskirja-projekti: MRI-based radiotherapy Sädehoidon työvaiheet ja kuvien käyttö
Kojemeteorologia. Sami Haapanala syksy 2013. Fysiikan laitos, Ilmakehätieteiden osasto
 Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Kojemeteorologia, 3 op 9 luentoa, 3 laskuharjoitukset ja vierailu mittausasemalle Tentti Oppikirjana Rinne & Haapanala:
Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Kojemeteorologia, 3 op 9 luentoa, 3 laskuharjoitukset ja vierailu mittausasemalle Tentti Oppikirjana Rinne & Haapanala:
Julkinen Mobiililaserkeilaukset rataverkolla
 Julkinen Tero Savolainen & Tommi Turkka 19.9.2018 Julkinen Tero Savolainen 2011 VR Track Oy Ratatekniikka DI, konetekniikka ABB Drive, mekaniikkasuunnittelu Pöyry Civil, teräsrakennesuunnittelu 2009 Infra
Julkinen Tero Savolainen & Tommi Turkka 19.9.2018 Julkinen Tero Savolainen 2011 VR Track Oy Ratatekniikka DI, konetekniikka ABB Drive, mekaniikkasuunnittelu Pöyry Civil, teräsrakennesuunnittelu 2009 Infra
Kolmiot, L1. Radiaani. Kolmiolauseet. Aiheet. Kulmayksiköt, aste. Radiaani. Suorakulmainen kolmio. Kolmiolauseet
 Kolmiot, L1 Kulmayksiköt 1 Aste, 1 (engl. degree) Kun kellon viisari kiertyy yhden kierroksen, sanomme, että se kääntyy 360 (360 astetta). Ajatus täyden kierroksen jakamisesta 360 asteeseen, juontaa kaldealaiseen
Kolmiot, L1 Kulmayksiköt 1 Aste, 1 (engl. degree) Kun kellon viisari kiertyy yhden kierroksen, sanomme, että se kääntyy 360 (360 astetta). Ajatus täyden kierroksen jakamisesta 360 asteeseen, juontaa kaldealaiseen
NTRIP Client asennusohje Android-puhelimeen Geodeettisen laitoksen DGNSS-paikannuskorjauksen
 NTRIP Client asennusohje Android-puhelimeen Geodeettisen laitoksen DGNSS-paikannuskorjauksen ka ytta miseksi Asenna puhelimeesi ilmainen Lance Lefeburen NTRIP Client Google Play-kaupasta. Käynnistä ohjelma
NTRIP Client asennusohje Android-puhelimeen Geodeettisen laitoksen DGNSS-paikannuskorjauksen ka ytta miseksi Asenna puhelimeesi ilmainen Lance Lefeburen NTRIP Client Google Play-kaupasta. Käynnistä ohjelma
GPS-koulutus Eräkarkku Petri Kuusela. p
 GPS-koulutus 2018 Eräkarkku Petri Kuusela tulirauta@gmail.com p. 040 772 3720 GPS toiminnallisuudet Missä olen (koordinaatit, kartalla) Opasta minut (navigointi) Paljonko matkaa (navigointi maastossa)
GPS-koulutus 2018 Eräkarkku Petri Kuusela tulirauta@gmail.com p. 040 772 3720 GPS toiminnallisuudet Missä olen (koordinaatit, kartalla) Opasta minut (navigointi) Paljonko matkaa (navigointi maastossa)
Vertaileva lähestymistapa järven virtauskentän arvioinnissa
 Vertaileva lähestymistapa järven virtauskentän arvioinnissa Vertaileva lähestymistapa järven virtauskentän arvioinnissa Sisältö: 1. Virtauksiin vaikuttavat tekijät 2. Tuulen vaikutus 3. Järven syvyyden
Vertaileva lähestymistapa järven virtauskentän arvioinnissa Vertaileva lähestymistapa järven virtauskentän arvioinnissa Sisältö: 1. Virtauksiin vaikuttavat tekijät 2. Tuulen vaikutus 3. Järven syvyyden
Havaitsevan tähtitieteen pk 1 luento 12, Kalvot: Jyri Näränen & Mikael Granvik
 Havaitsevan tähtitieteen pk 1 luento 12, Kalvot: Jyri Näränen & Mikael Granvik 7. Kuvankäsittely 7. Kuvankäsittely 1. CCD kuvien jälkikäsittely 7. Kuvankäsittely 1. CCD kuvien jälkikäsittely 2. CCD havaintojen
Havaitsevan tähtitieteen pk 1 luento 12, Kalvot: Jyri Näränen & Mikael Granvik 7. Kuvankäsittely 7. Kuvankäsittely 1. CCD kuvien jälkikäsittely 7. Kuvankäsittely 1. CCD kuvien jälkikäsittely 2. CCD havaintojen
Results on the new polydrug use questions in the Finnish TDI data
 Results on the new polydrug use questions in the Finnish TDI data Multi-drug use, polydrug use and problematic polydrug use Martta Forsell, Finnish Focal Point 28/09/2015 Martta Forsell 1 28/09/2015 Esityksen
Results on the new polydrug use questions in the Finnish TDI data Multi-drug use, polydrug use and problematic polydrug use Martta Forsell, Finnish Focal Point 28/09/2015 Martta Forsell 1 28/09/2015 Esityksen
SwemaAir 5 Käyttöohje
 SwemaAir 5 Käyttöohje 1. Esittely SwemaAir 5 on kuumalanka-anemometri lämpötilan, ilmanvirtauksen sekä -nopeuden mittaukseen. Lämpötila voidaan esittää joko C, tai F, ilmannopeus m/s tai fpm ja ilman virtaus
SwemaAir 5 Käyttöohje 1. Esittely SwemaAir 5 on kuumalanka-anemometri lämpötilan, ilmanvirtauksen sekä -nopeuden mittaukseen. Lämpötila voidaan esittää joko C, tai F, ilmannopeus m/s tai fpm ja ilman virtaus
Uudet teknologiat mitä mahdollisuuksia ja käytännön sovelluksia suoritusten seurantaan eri signaaleilla
 Uudet teknologiat mitä mahdollisuuksia ja käytännön sovelluksia suoritusten seurantaan eri signaaleilla Vesa Linnamo Liikuntabiologian laitos Jyväskylän yliopisto Maisterikoulutus Liikuntateknologia Vuokatti
Uudet teknologiat mitä mahdollisuuksia ja käytännön sovelluksia suoritusten seurantaan eri signaaleilla Vesa Linnamo Liikuntabiologian laitos Jyväskylän yliopisto Maisterikoulutus Liikuntateknologia Vuokatti
KJR-C2003 Virtausmekaniikan perusteet, K2017 Tentti, perjantai :00-12:00 Lue tehtävät huolellisesti. Selitä tehtävissä eri vaiheet.
 KJR-C2003 Virtausmekaniikan perusteet, K2017 Tentti, perjantai 26.5.2017 8:00-12:00 Lue tehtävät huolellisesti. Selitä tehtävissä eri vaiheet. Pelkät kaavat ja ratkaisu eivät riitä täysiin pisteisiin.
KJR-C2003 Virtausmekaniikan perusteet, K2017 Tentti, perjantai 26.5.2017 8:00-12:00 Lue tehtävät huolellisesti. Selitä tehtävissä eri vaiheet. Pelkät kaavat ja ratkaisu eivät riitä täysiin pisteisiin.
Mervento Oy, Vaasa Tuulivoimalan melun leviämisen mallinnus 2014. 19.3.2014 Projektinumero: 305683. WSP Finland Oy
 Mervento Oy, Vaasa Tuulivoimalan melun leviämisen mallinnus 2014 19.3.2014 2 (6) Sisällysluettelo 1 Johdanto... 3 2 Lähtötiedot ja menetelmät... 3 2.1 Äänitehotasojen mittaus... 3 2.2 Laskentamalli...
Mervento Oy, Vaasa Tuulivoimalan melun leviämisen mallinnus 2014 19.3.2014 2 (6) Sisällysluettelo 1 Johdanto... 3 2 Lähtötiedot ja menetelmät... 3 2.1 Äänitehotasojen mittaus... 3 2.2 Laskentamalli...
Numeeriset menetelmät
 Numeeriset menetelmät Luento 3 Ti 13.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 3 Ti 13.9.2011 p. 1/37 p. 1/37 Epälineaariset yhtälöt Newtonin menetelmä: x n+1 = x n f(x n) f (x n ) Sekanttimenetelmä:
Numeeriset menetelmät Luento 3 Ti 13.9.2011 Timo Männikkö Numeeriset menetelmät Syksy 2011 Luento 3 Ti 13.9.2011 p. 1/37 p. 1/37 Epälineaariset yhtälöt Newtonin menetelmä: x n+1 = x n f(x n) f (x n ) Sekanttimenetelmä:
Satelliittipaikannuksen perusteet
 Satelliittipaikannuksen perusteet 21.02.2018 Koulutuskeskus Sedu, Ilmajoki Satelliittipaikannus tarkoittaa vastaanottimen sijainninmääritystä satelliittijärjestelmien lähettämien radiosignaalien perusteella.
Satelliittipaikannuksen perusteet 21.02.2018 Koulutuskeskus Sedu, Ilmajoki Satelliittipaikannus tarkoittaa vastaanottimen sijainninmääritystä satelliittijärjestelmien lähettämien radiosignaalien perusteella.
Verkkodatalehti. FLOWSIC150 Carflow TILAVUUSVIRTAUKSEN MITTALAITTEET
 Verkkodatalehti FLOWSIC150 Carflow A B C D E F H I J K L M N O P Q R S T Tilaustiedot Tyyppi FLOWSIC150 Carflow Tuotenumero Pyynnöstä Tuotteen tarkat laitespesifikaatiot ja suorituskykytiedot voivat olla
Verkkodatalehti FLOWSIC150 Carflow A B C D E F H I J K L M N O P Q R S T Tilaustiedot Tyyppi FLOWSIC150 Carflow Tuotenumero Pyynnöstä Tuotteen tarkat laitespesifikaatiot ja suorituskykytiedot voivat olla
Geotrim TAMPEREEN SEUTUKUNNAN MITTAUSPÄIVÄT 29.3.2006
 Geotrim TAMPEREEN SEUTUKUNNAN MITTAUSPÄIVÄT 29.3.2006 Satelliittimittauksen tulevaisuus GPS:n modernisointi, L2C, L5 GALILEO GLONASS GNSS GPS:n modernisointi L2C uusi siviilikoodi L5 uusi taajuus Block
Geotrim TAMPEREEN SEUTUKUNNAN MITTAUSPÄIVÄT 29.3.2006 Satelliittimittauksen tulevaisuus GPS:n modernisointi, L2C, L5 GALILEO GLONASS GNSS GPS:n modernisointi L2C uusi siviilikoodi L5 uusi taajuus Block
Linjurin parkkihallin kellarikerroksen valaistuksen uudistusprojekti ennen/jälkeen mittaustulokset, sekä ennen/jälkeen kuvia
 Valaistus tasot alla olevaan pohjapiirrokseen merkityistä paikoista. Mittaukset suoritettu alla kerrotuin päivämäärin, sekä kellon ajoin ja kuvaukset heti tämän perään, jotka olivat valmiina noin 15 minuuttia
Valaistus tasot alla olevaan pohjapiirrokseen merkityistä paikoista. Mittaukset suoritettu alla kerrotuin päivämäärin, sekä kellon ajoin ja kuvaukset heti tämän perään, jotka olivat valmiina noin 15 minuuttia
LAS- ja ilmakuva-aineistojen käsittely ArcGIS:ssä
 Esri Finland LAS- ja ilmakuva-aineistojen käsittely ArcGIS:ssä November 2012 Janne Saarikko Agenda Lidar-aineistot ja ArcGIS 10.1 - Miten LAS-aineistoa voidaan hyödyntää? - Aineistojen hallinta LAS Dataset
Esri Finland LAS- ja ilmakuva-aineistojen käsittely ArcGIS:ssä November 2012 Janne Saarikko Agenda Lidar-aineistot ja ArcGIS 10.1 - Miten LAS-aineistoa voidaan hyödyntää? - Aineistojen hallinta LAS Dataset
Onko tekniikasta apua?
 Onko tekniikasta apua? Lentoturvallisuusseminaari 2013 Jari Lyytinen Vastuullinen liikenne. Yhteinen asia. Katsaus törmäyksenestomenetelmiin Oma porrastus See and Avoid Törmäyskurssilla olevat koneet hankalimpia
Onko tekniikasta apua? Lentoturvallisuusseminaari 2013 Jari Lyytinen Vastuullinen liikenne. Yhteinen asia. Katsaus törmäyksenestomenetelmiin Oma porrastus See and Avoid Törmäyskurssilla olevat koneet hankalimpia
Differentiaali- ja integraalilaskenta
 Differentiaali- ja integraalilaskenta Opiskelijan nimi: DIFFERENTIAALILASKENTA 1. Raja-arvon käsite, derivaatta raja-arvona 1.1 Raja-arvo pisteessä 1.2 Derivaatan määritelmä 1.3 Derivaatta raja-arvona
Differentiaali- ja integraalilaskenta Opiskelijan nimi: DIFFERENTIAALILASKENTA 1. Raja-arvon käsite, derivaatta raja-arvona 1.1 Raja-arvo pisteessä 1.2 Derivaatan määritelmä 1.3 Derivaatta raja-arvona
Luento 4 Georeferointi
 Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Vanhankaupunginkosken ultraäänikuvaukset Simsonar Oy Pertti Paakkolanvaara
 Vanhankaupunginkosken ultraäänikuvaukset 15.7. 14.11.2014 Simsonar Oy Pertti Paakkolanvaara Avaintulokset 2500 2000 Ylös vaellus pituusluokittain: 1500 1000 500 0 35-45 cm 45-60 cm 60-70 cm >70 cm 120
Vanhankaupunginkosken ultraäänikuvaukset 15.7. 14.11.2014 Simsonar Oy Pertti Paakkolanvaara Avaintulokset 2500 2000 Ylös vaellus pituusluokittain: 1500 1000 500 0 35-45 cm 45-60 cm 60-70 cm >70 cm 120
Sijainnin merkitys Itellassa GIS. Jakelun kehittämisen ajankohtaispäivä
 Jakelun kehittämisen ajankohtaispäivä Karttajärjestelmällä havainnollisuutta, tehokkuutta ja parempaa asiakaspalvelua Käytännön kokemuksia pilotoinneista ja käytössä olevista karttajärjestelmistä Juha
Jakelun kehittämisen ajankohtaispäivä Karttajärjestelmällä havainnollisuutta, tehokkuutta ja parempaa asiakaspalvelua Käytännön kokemuksia pilotoinneista ja käytössä olevista karttajärjestelmistä Juha
Fysiikan laboratoriotyöt 1, työ nro: 2, Harmoninen värähtelijä
 Fysiikan laboratoriotyöt 1, työ nro: 2, Harmoninen värähtelijä Tekijä: Mikko Laine Tekijän sähköpostiosoite: miklaine@student.oulu.fi Koulutusohjelma: Fysiikka Mittausten suorituspäivä: 04.02.2013 Työn
Fysiikan laboratoriotyöt 1, työ nro: 2, Harmoninen värähtelijä Tekijä: Mikko Laine Tekijän sähköpostiosoite: miklaine@student.oulu.fi Koulutusohjelma: Fysiikka Mittausten suorituspäivä: 04.02.2013 Työn
Luento 4 Georeferointi Maa Fotogrammetrian perusteet 1
 Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Race Technology tiedonkeruu tuotteet s2i Motorsportilta!
 Race Technology tiedonkeruu tuotteet s2i Motorsportilta! Radalle, ralliin, kadulle, vesille ja vaikka lumelle kattava valikoima GPS pohjaisia tiedonkeruu järjestelmiä, näyttöjä ja antureita autoihin, veneisiin,
Race Technology tiedonkeruu tuotteet s2i Motorsportilta! Radalle, ralliin, kadulle, vesille ja vaikka lumelle kattava valikoima GPS pohjaisia tiedonkeruu järjestelmiä, näyttöjä ja antureita autoihin, veneisiin,
MITEN. IoT AUTTAA SÄHKÖYHTIÖTÄ
 MITEN IoT AUTTAA SÄHKÖYHTIÖTÄ IoT ON DIGITALLE ARKIPÄIVÄÄ Digita on vakaa ja luotettava kotimainen toimija, jolla on IoT:ta varten valmis infrastruktuuri tarjolla palvelualustaksi kumppaneiden ratkaisuille.
MITEN IoT AUTTAA SÄHKÖYHTIÖTÄ IoT ON DIGITALLE ARKIPÄIVÄÄ Digita on vakaa ja luotettava kotimainen toimija, jolla on IoT:ta varten valmis infrastruktuuri tarjolla palvelualustaksi kumppaneiden ratkaisuille.
Mitat. Tuotekoodi. Materiaali ja pintakäsittely. lindab kattolaittet LKP. * Kattojärjestelmä 1, muut kattojärjestelmät, katso Integrakappale.
 LKP Tuotekuvaus LCP on tasopintaan asennettava hajottaja, jossa on pyöreä etulevy. LKP:ssä on neliömäinen etulevy. Moleissa malleissa on samat tekniset ominaisuudet. Hajottajia voidaan käyttää sekä tulo-,
LKP Tuotekuvaus LCP on tasopintaan asennettava hajottaja, jossa on pyöreä etulevy. LKP:ssä on neliömäinen etulevy. Moleissa malleissa on samat tekniset ominaisuudet. Hajottajia voidaan käyttää sekä tulo-,
143081-1.1 1(5)+liitteet
+liitteet") 1481-1.1 1(5)+liitteet DI Benoît Gouatarbès, TkT Henri Penttinen 1.7.2014 Nobinan Roihupellon linja-autovarikko Tilaaja: Nobina Finland Oy Tilaus: 11.6.2014 Yhteyshenkilö: Katja Olli ÄÄNITASOMITTAUKSET
1481-1.1 1(5)+liitteet DI Benoît Gouatarbès, TkT Henri Penttinen 1.7.2014 Nobinan Roihupellon linja-autovarikko Tilaaja: Nobina Finland Oy Tilaus: 11.6.2014 Yhteyshenkilö: Katja Olli ÄÄNITASOMITTAUKSET
Mittaushavaintojen täsmällinen käsittelymenenetelmä
 Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
Fotogrammetrian termistöä
 Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Laserkeilausaineiston hyödynt. dyntäminen Finavian tarpeisiin
 Laserkeilausaineiston hyödynt dyntäminen Finavian tarpeisiin Maanmittauslaitoksen laserkeilausseminaari 10.10.2008 Finavia / Jussi Kivelä ICAO:n asettamat vaatimukset Kansainvälisen Siviili-ilmailujärjestö
Laserkeilausaineiston hyödynt dyntäminen Finavian tarpeisiin Maanmittauslaitoksen laserkeilausseminaari 10.10.2008 Finavia / Jussi Kivelä ICAO:n asettamat vaatimukset Kansainvälisen Siviili-ilmailujärjestö