Liikemittaukset purjeveneessä, MP:n kilpakoulu
|
|
|
- Esa Korhonen
- 8 vuotta sitten
- Katselukertoja:
Transkriptio

1 Liikemittaukset purjeveneessä, MP:n kilpakoulu Christer Helenelund

2 Miksi mitata veneen liikkeitä? Liikkeet vaikuttavat venevauhtiin ja hallittavuuteen Liikkeet vaikuttavat myös heikentävästi muihin mittauksiin Nopeus Tuuli (Syvyys) Liikkeistä näkee veneessä tehdyt manööverit Hallitsemalla tai vähentämällä liikkeitä voidaan ainakin periaatteessa parantaa veneen suorituskykyä energiatehokkuutta (moottoriajossa) hallittavuutta matkanteon mukavuutta ja turvallisuutta Tässä esityksessä keskitytään lähinnä vain mittausosioon
 hallittavuutta matkanteon")
3 Määritelmiä Veneen perusliikkeet Kuusi vapausastetta (6DOF)

4 Kiertyvät liikkeet English Finnish Swedish Yaw Mutkailu Gir Pitch Jyskintä Stampning Roll Keinunta Rullning

5 Lineaariset liikkeet English Finnish Swedish Surge Kiihtyily Surf Heave Kohoilu Hävning Sway Huojunta Svaj

6 Johtopäätöksiä Perusliikkeet voivat olla eri tavoin jatkuvia tai vaihtelevia Mikä tahansa liike voidaan kuitenkin jakaa kuuteen perusliikkeeseen Tällä voimme helpommin kuvata myös monimutkaisia liikkeitä Osa perusliikkeistä ovat tällöin usein pieniä

7 Muita liiketermejä: Speed (Nopeus/Fart) Leeway (Sorto/Avdrift) Drift (Ajelehtia/Driva) Heeling (Kallistuma/Krängning) Pounding (Jyskytys/Stampa eller stöta) Slamming (Paiske/Smäll) Wriggling (Kiemurtelu/Slingra) Swinging (Heilua/Pendla)
 Slamming (Paiske/Smäll) Wriggling")
8 Mikäli voidaan olettaa että alus on täysin jäykkä Kiertyvät liikkeet ovat aluksessa kaikkialla samat, mutta tuntuvat suuremmilta mitä kauempana liikekeskuksesta (Center of Motion - CoM) ne koetaan Liikekeskuksessa on kulkusunnan poikittaiset (pystysuuntaiset) lineaariset liikkeet 0. Aluksen lineaariset liikkeet lasketaan perinteisesti tietyn (annetun) pisteen, esim. massa-keskuksen suhteen
 pisteen, esim.")
9 Liikekeskuksen (CoM) sijainti vaihtelee Eri tapauksia CoM sijaitsee keulan ja perän välissä CoM sijaitsee perän takana CoM sijaitsee keulan edessä

10 SeaMODE TM protokokoonpano 2011 Motion Sensor GPS PC with SeaMODE SW Motion Sensor

11 Installation setup Y40 Shangri-La: b 1 = 1315 mm b 2 = mm Acc2 Acc1 longitudinal midline z b 1 y x b 2 CoM

12 mg Kiihtyvyysmittausten tuloksia (Y40) Ajo kohtisuoraa 30cm peräaaltoja vastaan (SOG=5.6 ->5.1kn) y z x 1.7s 2.1s

13


14 Paiskemittauksia Riianlahdella 2011 y z x

15 Paiskemittauksia Riianlahdella x 1.94s Hetkellinen jarruttava voima: Fx = m * ax = = 8500 * 350 * 9.82/ N

16 Yleistä liikemittauksista Liikemittausjärjestelmän avulla tiedämme: Aluksen sijainti (GPS) Sen kolmiulotteinen tila Miten se juuri tuolloin liikkuu Edellyttäen että alus voidaan nähdä jäykkänä ja tunnemme aluksen massan ja massakeskuksen sijainnin, voimme periaatteessa laskea myös siihen kohdistuvat voimat

17 Liikekompensoinnilla voidaan myös parantaa muiden mittausten laatua Hyvän tarkkuuden aikaansaamiseksi useat venemittaukset vaativat kompensoinniin veneen liikkeiden suhteen Esimerkkejä: Nopeus Tuuli Syvyys Lasketut seurannaissuureet kuten esim. Tosituuli, VMG kärsivät merkittävästi kehnoista perusmittauksista

18 Nopeuden mittaus Eri mittausmenetelmillä saadaan erilaisia tuloksia Perus-GPS mittaa nopeuden pohjan suhteen luotettavasti vain mikäli nopeus on tasainen ja enemmän tai vähemmän samansuuntainen Siipipyöräloki mittaa nopeuden veden suhteen ja reagoi hyvin nopeusvaihteluihin hyvin mikäli anturi on puhdas, vedessä ja integrointiaika riittävän lyhyt. Myös kalibronti on tärkeä. Integroimalla kulkusuunnan kiihtyvyys nopeudeksi saadaan hyvä mittari lyhytjaksoisten nopeusvaihteluiden indikoimiseen Ratkaisuna on anturifuusio jossa kahden tai kolmen eri mittausmenetelmän tulokset sulautetaan yhdeksi parempilaatuiseksi mittariksi. Tässä on huomioitava että eri menetelmät mittaavat eri asioita (SOG, STW etc.) milloin menetelmät mittaavat hyvin ja milloin ei eri menetelmien integrointiajat

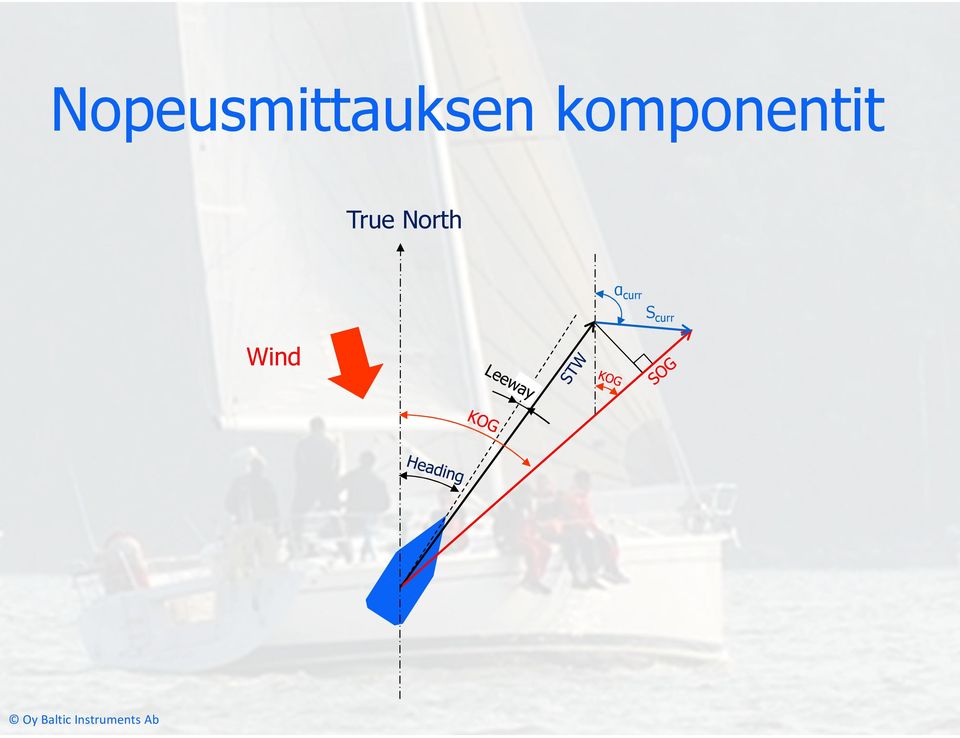
19 Nopeusmittauksen komponentit True North α curr S curr Wind
20 Tuulimittaukseen vaikuttavat tekijät purjeveneissä 1. Tuulianturin ominaiskäyrä ja integrointiaika 2. Tuulianturin asennuskorkeus ja suuntaus 3. Veneen vauhti veden suhteen 4. Kallistuma ja keinunta, vaikuttaa pääasiassa kohtauskulmaan, mutta myös korkeuteen 5. Tuuliväänne, eli tuulen sekä nopeuden että suunnan jakauma korkeuden suhteen (riippuu ilmakehän tilasta) 6. Jyskintäkulma (Pitch angle) ja sen keinunta (oleelliset lähinnä valtameriolosuhteissa) 7. Mutkailu (Yaw), mikäli anturi on asennettu liikekeskuksen etupuolelle 8. Sorto 9. Tuulen kiertyminen tuulianturin kohdalla (Upwash) 10.(Maston mahdollinen kääntyminen)
 ja sen keinunta (oleelliset lähinnä valtameriolosuhteissa) 7.")
21 Myös kevyellä kelillä voidaan veneen liiketietoja hyödyntää Painojakauman optimointi veneen lastauksessa Rungon märkäpinnan muoto ja pinta-ala on oleellinen nopeutta parantaessa tai optimodessa energiakulutusta Kallistuman hallinta Myös kevyellä kelillä on mielenkiintoista monitoroida manöövereiden ajoituksia, kestoaikaa ja niiden osaelementteja
22 Mittaustuloksia
23 Track during the selected short logging sequence
24 SOG and Heeling of Kind of Magic during the selected short logging sequence

25 SOG and Heeling of Kind of Magic during the selected short logging sequence
26 SOG x 5 and Heeling of Kind of Magic during the selected tack SOG x 5 Tack duration=20.0s Ph3=12.5s Ph1=3.2s Ph0=12.0s Ph1+Ph2=7.5s
MP:n senioreiden kilpakoulu 2010
 MP:n senioreiden kilpakoulu 2010 2010.3.1 19:45-21:00 Timo Vesalainen Tuulitiedon ja instrumentoinnin hyödyntäminen Miten olen oppinut pärjäämään kisoissa s/y Valpurilla Miten toteutin ja miten nyt kannattaa
MP:n senioreiden kilpakoulu 2010 2010.3.1 19:45-21:00 Timo Vesalainen Tuulitiedon ja instrumentoinnin hyödyntäminen Miten olen oppinut pärjäämään kisoissa s/y Valpurilla Miten toteutin ja miten nyt kannattaa
Olemme työskennelleet todella paljon viimeiset vuodet Iso-Britanniassa, ja ollakseni rehellinen, työ on vielä kesken.
 Purjeet ja riki Olemme kääntäneet tämän tekstin ruotsinkielisestä artikkelista. http://www.swe.magicmicro.org/e107_files/public/segeltips.pdf Ruotsalaiset ovat keränneet eri MM-sivustoilta artikkeleita,
Purjeet ja riki Olemme kääntäneet tämän tekstin ruotsinkielisestä artikkelista. http://www.swe.magicmicro.org/e107_files/public/segeltips.pdf Ruotsalaiset ovat keränneet eri MM-sivustoilta artikkeleita,
Sääasema Probyte JUNIOR
 Sääasema Probyte JUNIOR JUNIOR sääanturi COM1 12VDC RS-232 signaali PC W9x Excel-tiedosto PROBYTE JUNIOR sääanturin toimintaperiaate Yleistä Probyte SÄÄASEMA JUNIOR1 on sään mittaukseen tarkoitettu ulkoanturi,
Sääasema Probyte JUNIOR JUNIOR sääanturi COM1 12VDC RS-232 signaali PC W9x Excel-tiedosto PROBYTE JUNIOR sääanturin toimintaperiaate Yleistä Probyte SÄÄASEMA JUNIOR1 on sään mittaukseen tarkoitettu ulkoanturi,
Nopeus, kiihtyvyys ja liikemäärä Vektorit
 Nopeus, kiihtyvyys ja liikemäärä Vektorit Luento 2 https://geom.mathstat.helsinki.fi/moodle/course/view.php?id=360 Luennon tavoitteet: Vektorit tutuiksi Koordinaatiston valinta Vauhdin ja nopeuden ero
Nopeus, kiihtyvyys ja liikemäärä Vektorit Luento 2 https://geom.mathstat.helsinki.fi/moodle/course/view.php?id=360 Luennon tavoitteet: Vektorit tutuiksi Koordinaatiston valinta Vauhdin ja nopeuden ero
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin tutkinnon ratkaisut
 Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 24.4.2015 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 24.4.2015 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Purjeiden trimmaus SPV kilpapurjehdusseminaari 2015
 Purjeiden trimmaus SPV kilpapurjehdusseminaari 2015 1 Mitä trimmaus on Miksi trimmataan Purjeveneen teoriaa Think one Trimmauksen välineet Eri rikityyppejä MM-tason rikitrimmi Virtauslangoista Esimerkkejä
Purjeiden trimmaus SPV kilpapurjehdusseminaari 2015 1 Mitä trimmaus on Miksi trimmataan Purjeveneen teoriaa Think one Trimmauksen välineet Eri rikityyppejä MM-tason rikitrimmi Virtauslangoista Esimerkkejä
Venesuunnittelu, Vivace-projekti Bibbe Furustam MP:n Kilpakoulussa 28.1.2013
 Venesuunnittelu, Vivace-projekti Bibbe Furustam MP:n Kilpakoulussa 28.1.2013 OSA 1. Hiukan venesuunnittelusta Suunnittelijan tehtävä (suorituskykyä ajatellen)on Minimoida vastusta Maksimoida eteenpäin
Venesuunnittelu, Vivace-projekti Bibbe Furustam MP:n Kilpakoulussa 28.1.2013 OSA 1. Hiukan venesuunnittelusta Suunnittelijan tehtävä (suorituskykyä ajatellen)on Minimoida vastusta Maksimoida eteenpäin
Luento 5: Käyräviivainen liike. Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat θ, ω ja α Yhdistetty liike
 Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat θ, ω ja α Yhdistetty liike 1 / 29 Luennon sisältö Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat
Luento 5: Käyräviivainen liike Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat θ, ω ja α Yhdistetty liike 1 / 29 Luennon sisältö Käyräviivainen liike Heittoliike Ympyräliike Kulmamuuttujat
Purjeveneen suorituskyvyn perustekijät teoriasta käytäntöön
 Purjeveneen suorituskyvyn perustekijät teoriasta käytäntöön Markku Hentinen MP:n kilpakoulu 25.1.2016 Fysiikan yo-tehtävä 2014 Purjehduskilpailun perustekijät Olosuhteet: tuulen ja aallokon optimaalinen
Purjeveneen suorituskyvyn perustekijät teoriasta käytäntöön Markku Hentinen MP:n kilpakoulu 25.1.2016 Fysiikan yo-tehtävä 2014 Purjehduskilpailun perustekijät Olosuhteet: tuulen ja aallokon optimaalinen
SMG-4500 Tuulivoima. Kolmannen luennon aihepiirit TUULEN TEHO
 SMG-4500 Tuulivoima Kolmannen luennon aihepiirit Tuulen teho: Betzin lain johtaminen Tuulivoimalatyypeistä: Miksi vaaka-akselinen, miksi kolme lapaa? Aerodynamiikkaa: Tuulivoimalan roottorin lapasuunnittelun
SMG-4500 Tuulivoima Kolmannen luennon aihepiirit Tuulen teho: Betzin lain johtaminen Tuulivoimalatyypeistä: Miksi vaaka-akselinen, miksi kolme lapaa? Aerodynamiikkaa: Tuulivoimalan roottorin lapasuunnittelun
Kojemeteorologia. Sami Haapanala syksy 2013. Fysiikan laitos, Ilmakehätieteiden osasto
 Kojemeteorologia Sami Haapanala syksy 03 Fysiikan laitos, Ilmakehätieteien osasto Tuulen nopeuen ja suunnan mittaaminen Tuuli on vektorisuure, jolla on siis nopeus ja suunta Yleensä tuulella tarkoitetaan
Kojemeteorologia Sami Haapanala syksy 03 Fysiikan laitos, Ilmakehätieteien osasto Tuulen nopeuen ja suunnan mittaaminen Tuuli on vektorisuure, jolla on siis nopeus ja suunta Yleensä tuulella tarkoitetaan
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
KJR-C1001 Statiikka ja dynamiikka Luento 15.3.2016 Susanna Hurme Päivän aihe: Translaatioliikkeen kinematiikka: asema, nopeus ja kiihtyvyys (Kirjan luvut 12.1-12.5, 16.1 ja 16.2) Osaamistavoitteet Ymmärtää
Vektorit. Kertausta 12.3.2013 Seppo Lustig (Lähde: avoinoppikirja.fi)
") Vektorit Kertausta 12.3.2013 Seppo Lustig (Lähde: avoinoppikirja.fi) Sisällys Vektorit Nimeäminen Vektorien kertolasku Vektorien yhteenlasku Suuntasopimus Esimerkki: laivan nopeus Vektorit Vektoreilla
Vektorit Kertausta 12.3.2013 Seppo Lustig (Lähde: avoinoppikirja.fi) Sisällys Vektorit Nimeäminen Vektorien kertolasku Vektorien yhteenlasku Suuntasopimus Esimerkki: laivan nopeus Vektorit Vektoreilla
1 Tieteellinen esitystapa, yksiköt ja dimensiot
 1 Tieteellinen esitystapa, yksiköt ja dimensiot 1.1 Tieteellinen esitystapa Maan ja auringon välinen etäisyys on 1 AU. AU on astronomical unit, joka määritelmänsä mukaan on maan ja auringon välinen keskimääräinen
1 Tieteellinen esitystapa, yksiköt ja dimensiot 1.1 Tieteellinen esitystapa Maan ja auringon välinen etäisyys on 1 AU. AU on astronomical unit, joka määritelmänsä mukaan on maan ja auringon välinen keskimääräinen
DIGIBONUSTEHTÄVÄ: MPKJ NCC INDUSTRY OY LOPPURAPORTTI
 DIGIBONUSTEHTÄVÄ: MPKJ NCC INDUSTRY OY LOPPURAPORTTI Tekijä: Marko Olli 16.10.2018 Sisällys 1 Johdanto...3 2 Hankkeen tavoitteet ja vaikuttavuus...3 3 Laitteisto ja mittaustarkkuus...3 4 Pilotointi ja
DIGIBONUSTEHTÄVÄ: MPKJ NCC INDUSTRY OY LOPPURAPORTTI Tekijä: Marko Olli 16.10.2018 Sisällys 1 Johdanto...3 2 Hankkeen tavoitteet ja vaikuttavuus...3 3 Laitteisto ja mittaustarkkuus...3 4 Pilotointi ja
FYSIIKKA (FY91): 9. KURSSI: Kertauskurssi KOE 30.01.2014 VASTAA KUUTEEN (6) TEHTÄVÄÄN!!
: 9. KURSSI: Kertauskurssi KOE 30.01.2014 VASTAA KUUTEEN (6) TEHTÄVÄÄN!!") FYSIIKKA (FY91): 9. KURSSI: Kertauskurssi KOE 30.01.2014 VASTAA KUUTEEN (6) TEHTÄVÄÄN!! 1. Vastaa, ovatko seuraavat väittämät oikein vai väärin. Perustelua ei tarvitse kirjoittaa. a) Atomi ei voi lähettää
FYSIIKKA (FY91): 9. KURSSI: Kertauskurssi KOE 30.01.2014 VASTAA KUUTEEN (6) TEHTÄVÄÄN!! 1. Vastaa, ovatko seuraavat väittämät oikein vai väärin. Perustelua ei tarvitse kirjoittaa. a) Atomi ei voi lähettää
ELEC-A3110 Mekaniikka (5 op)
") ELEC-A3110 Mekaniikka (5 op) Yliopistonlehtori, tkt Sami Kujala Mikro- ja nanotekniikan laitos Syksy 2016 1 / 21 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia
ELEC-A3110 Mekaniikka (5 op) Yliopistonlehtori, tkt Sami Kujala Mikro- ja nanotekniikan laitos Syksy 2016 1 / 21 Luento 2: Kertausta ja johdantoa Suoraviivainen liike Jumppaa Harjoituksia ja oivalluksia
Rannikkomerenkulkuoppi
 Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 15.12.2017 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 15.12.2017 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Fysiikan perusteet. Liikkeet. Antti Haarto 22.05.2012. www.turkuamk.fi
 Fysiikan perusteet Liikkeet Antti Haarto.5.1 Suureita Aika: tunnus t, yksikkö: sekunti s Paikka: tunnus x, y, r, ; yksikkö: metri m Paikka on ektorisuure Suoraiiaisessa liikkeessä kappaleen paikka (asema)
Fysiikan perusteet Liikkeet Antti Haarto.5.1 Suureita Aika: tunnus t, yksikkö: sekunti s Paikka: tunnus x, y, r, ; yksikkö: metri m Paikka on ektorisuure Suoraiiaisessa liikkeessä kappaleen paikka (asema)
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin tutkinnon ratkaisut
 Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 09.12.2011 tutkinnon ratkaisut Harjoitus tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 09.12.2011 tutkinnon ratkaisut Harjoitus tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
FYSP101/K1 KINEMATIIKAN KUVAAJAT
 FYSP101/K1 KINEMATIIKAN KUVAAJAT Työn tavoitteita tutustua kattavasti DataStudio -ohjelmiston käyttöön syventää kinematiikan kuvaajien (paikka, nopeus, kiihtyvyys) hallintaa oppia yhdistämään kinematiikan
FYSP101/K1 KINEMATIIKAN KUVAAJAT Työn tavoitteita tutustua kattavasti DataStudio -ohjelmiston käyttöön syventää kinematiikan kuvaajien (paikka, nopeus, kiihtyvyys) hallintaa oppia yhdistämään kinematiikan
KOSTEUSMITTAUSRAPORTTI
 KOSTEUSMITTAUSRAPORTTI Pientalontie)1)00000)Paikkakunta Asiakas%Asko%10129B Lattioiden%kosteus Heikki%Jussila 040%900%5609 heikki.jussila@vertia.fi www.vertia.fi 1)))YHTEENVETO Kohteessa%tehtiin%betonin%suhteellisen%kosteuden%mittauksia.
KOSTEUSMITTAUSRAPORTTI Pientalontie)1)00000)Paikkakunta Asiakas%Asko%10129B Lattioiden%kosteus Heikki%Jussila 040%900%5609 heikki.jussila@vertia.fi www.vertia.fi 1)))YHTEENVETO Kohteessa%tehtiin%betonin%suhteellisen%kosteuden%mittauksia.
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin tutkinnon ratkaisut. Rannikkomerenkulkuoppi
 Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 12.4.2019 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 12.4.2019 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Suomen Navigaatioliitto FinlandsNavigationsförbund Rannikkomerenkulkuopin tutkinto
 Suomen Navigaatioliitto FinlandsNavigationsförbund Rannikkomerenkulkuopin 20.04.2012 tutkinto Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi, kiinteä
Suomen Navigaatioliitto FinlandsNavigationsförbund Rannikkomerenkulkuopin 20.04.2012 tutkinto Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi, kiinteä
Järvenpään Perhelän korttelin kutsukilpailu ehdotusten vertailu
 Järvenpään Perhelän korttelin kutsukilpailu ehdotusten vertailu KERROSALAT K-ALA HUONEISTOALAT BRUTTO-A HYÖTYALA ASUNNOT LIIKETILAT YHTEENSÄ as. lkm ap lkm asunnot as aputilat YHT. liiketilat aulatilat,
Järvenpään Perhelän korttelin kutsukilpailu ehdotusten vertailu KERROSALAT K-ALA HUONEISTOALAT BRUTTO-A HYÖTYALA ASUNNOT LIIKETILAT YHTEENSÄ as. lkm ap lkm asunnot as aputilat YHT. liiketilat aulatilat,
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin tutkinnon ratkaisut
 Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 22.4.2016 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 22.4.2016 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Suomen Navigaatioliitto Finlands Navigationsförbund rf Saaristomerenkulkuopin tutkinnon 15.4.2011 tehtävien ratkaisut
 1 Suomen Navigaatioliitto Finlands Navigationsförbund rf Saaristomerenkulkuopin tutkinnon 15.4.2011 tehtävien ratkaisut YLEISTÄ Tutkinnossa käytetty vene on 13 metriä pitkä moottorivene. Veneen syväys
1 Suomen Navigaatioliitto Finlands Navigationsförbund rf Saaristomerenkulkuopin tutkinnon 15.4.2011 tehtävien ratkaisut YLEISTÄ Tutkinnossa käytetty vene on 13 metriä pitkä moottorivene. Veneen syväys
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin tutkinnon ratkaisut
 Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 9.12.2016 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 9.12.2016 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin tutkinto 14.12.2012
 Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin tutkinto 14.12.2012 Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi, kiinteä
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin tutkinto 14.12.2012 Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi, kiinteä
MP kilpakoulu
 MP kilpakoulu 29.1.2018 s/y Donna: historia, osaaminen, perusopit, uudet apuvälineet Miksi uusi hieno genoa veti huonommin kuin vanha? Mitä tehtiin, mitä opittiin ja mitä saavutettiin? 1 Donna - Inferno
MP kilpakoulu 29.1.2018 s/y Donna: historia, osaaminen, perusopit, uudet apuvälineet Miksi uusi hieno genoa veti huonommin kuin vanha? Mitä tehtiin, mitä opittiin ja mitä saavutettiin? 1 Donna - Inferno
SMG-4500 Tuulivoima. Kolmannen luennon aihepiirit ILMAVIRTAUKSEN ENERGIA JA TEHO. Ilmavirtauksen energia on ilmamolekyylien liike-energiaa.
 SMG-4500 Tuulivoima Kolmannen luennon aihepiirit Tuulen teho: Betzin lain johtaminen Tuulen mittaaminen Tuulisuuden mallintaminen Weibull-jakauman hyödyntäminen ILMAVIRTAUKSEN ENERGIA JA TEHO Ilmavirtauksen
SMG-4500 Tuulivoima Kolmannen luennon aihepiirit Tuulen teho: Betzin lain johtaminen Tuulen mittaaminen Tuulisuuden mallintaminen Weibull-jakauman hyödyntäminen ILMAVIRTAUKSEN ENERGIA JA TEHO Ilmavirtauksen
Suomen Navigaatioliitto Finlands Navigationsförbund rf Saaristomerenkulkuopin tutkinto 14.12.2012
 1 Suomen Navigaatioliitto Finlands Navigationsförbund rf Saaristomerenkulkuopin tutkinto 14.12.2012 Tutkinnossa käytetty moottorivene on 13 metriä pitkä, sen syväys on 1,2 metriä ja korkeus 3,4 metriä.
1 Suomen Navigaatioliitto Finlands Navigationsförbund rf Saaristomerenkulkuopin tutkinto 14.12.2012 Tutkinnossa käytetty moottorivene on 13 metriä pitkä, sen syväys on 1,2 metriä ja korkeus 3,4 metriä.
FYSIIKAN HARJOITUSKOE I Mekaniikka, 8. luokka
 FYSIIKAN HARJOITUSKOE I Mekaniikka, 8. luokka Oppilaan nimi: Pisteet: / 77 p. Päiväys: Koealue: kpl 13-18, s. 91-130 1. SUUREET. Täydennä taulukon tiedot. suure suureen tunnus suureen yksikkö matka aika
FYSIIKAN HARJOITUSKOE I Mekaniikka, 8. luokka Oppilaan nimi: Pisteet: / 77 p. Päiväys: Koealue: kpl 13-18, s. 91-130 1. SUUREET. Täydennä taulukon tiedot. suure suureen tunnus suureen yksikkö matka aika
Liikkeet. Haarto & Karhunen. www.turkuamk.fi
 Liikkeet Haarto & Karhunen Suureita Aika: tunnus t, yksikkö: sekunti = s Paikka: tunnus x, y, r, ; yksikkö: metri = m Paikka on ektorisuure Suoraiiaisessa liikkeessä kappaleen paikka (asema) oidaan ilmoittaa
Liikkeet Haarto & Karhunen Suureita Aika: tunnus t, yksikkö: sekunti = s Paikka: tunnus x, y, r, ; yksikkö: metri = m Paikka on ektorisuure Suoraiiaisessa liikkeessä kappaleen paikka (asema) oidaan ilmoittaa
Asiantuntijapalvelut - Tiestö Turku NURMIJÄRVEN KUNTA
 Asiantuntijapalvelut - Tiestö Turku 18.12.2015 NURMIJÄRVEN KUNTA Nopeusmittaukset / Syksy 2015 Nopeusmittaukset 2015 Nurmijärven kunta ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Asiantuntijapalvelut - Tiestö Turku 18.12.2015 NURMIJÄRVEN KUNTA Nopeusmittaukset / Syksy 2015 Nopeusmittaukset 2015 Nurmijärven kunta ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin tutkinnon ratkaisut
 Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 09.12.2005 tutkinnon ratkaisut Tehtävät on ratkaistu Microsoft PowerPoint ohjelmalla. Karttakuvat ovat skannattuja kuvia harjoitusmerikartasta
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 09.12.2005 tutkinnon ratkaisut Tehtävät on ratkaistu Microsoft PowerPoint ohjelmalla. Karttakuvat ovat skannattuja kuvia harjoitusmerikartasta
1 Tieteellinen esitystapa, yksiköt ja dimensiot
 1 Tieteellinen esitystapa, yksiköt ja dimensiot 1.1 Tieteellinen esitystapa Maan ja auringon välinen etäisyys on 1 AU. AU on astronomical unit, joka määritelmänsä mukaan on maan ja auringon välinen keskimääräinen
1 Tieteellinen esitystapa, yksiköt ja dimensiot 1.1 Tieteellinen esitystapa Maan ja auringon välinen etäisyys on 1 AU. AU on astronomical unit, joka määritelmänsä mukaan on maan ja auringon välinen keskimääräinen
GNX Wind. Käyttöopas
 GNX Wind Käyttöopas Helmikuu 2016 190-02003-37_0A Kaikki oikeudet pidätetään. Tekijänoikeuslakien mukaisesti tätä opasta ei saa kopioida kokonaan tai osittain ilman Garmin kirjallista lupaa. Garmin pidättää
GNX Wind Käyttöopas Helmikuu 2016 190-02003-37_0A Kaikki oikeudet pidätetään. Tekijänoikeuslakien mukaisesti tätä opasta ei saa kopioida kokonaan tai osittain ilman Garmin kirjallista lupaa. Garmin pidättää
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin tutkinnon ratkaisut
 Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 13.12.2013 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 13.12.2013 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
IL Dnro 46/400/2016 1(5) Majutveden aallokko- ja virtaustarkastelu Antti Kangas, Jan-Victor Björkqvist ja Pauli Jokinen
 Majutveden aallokko- ja virtaustarkastelu Antti Kangas, Jan-Victor Björkqvist ja Pauli Jokinen") IL Dnro 46/400/2016 1(5) Majutveden aallokko- ja virtaustarkastelu Antti Kangas, Jan-Victor Björkqvist ja Pauli Jokinen Ilmatieteen laitos 22.9.2016 IL Dnro 46/400/2016 2(5) Terminologiaa Keskituuli Tuulen
IL Dnro 46/400/2016 1(5) Majutveden aallokko- ja virtaustarkastelu Antti Kangas, Jan-Victor Björkqvist ja Pauli Jokinen Ilmatieteen laitos 22.9.2016 IL Dnro 46/400/2016 2(5) Terminologiaa Keskituuli Tuulen
Luento 10: Työ, energia ja teho. Johdanto Työ ja kineettinen energia Teho
 Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho 1 / 23 Luennon sisältö Johdanto Työ ja kineettinen energia Teho 2 / 23 Johdanto Energia suure, joka voidaan muuttaa muodosta toiseen,
Luento 10: Työ, energia ja teho Johdanto Työ ja kineettinen energia Teho 1 / 23 Luennon sisältö Johdanto Työ ja kineettinen energia Teho 2 / 23 Johdanto Energia suure, joka voidaan muuttaa muodosta toiseen,
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin tutkinnon ratkaisut. Rannikkomerenkulkuoppi
 Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 14.12.2018 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 14.12.2018 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Purjeiden trimmausta aloitteleville kilpapurjehtijoille
 Purjeiden trimmausta aloitteleville kilpapurjehtijoille Finn Express purjehtijat Ry Panu Ranta Mitä trimmaamisella tarkoitetaan Purjeen muodon muuttamista veneen suorituskyvyn / käyttäytymisen parantamiseksi
Purjeiden trimmausta aloitteleville kilpapurjehtijoille Finn Express purjehtijat Ry Panu Ranta Mitä trimmaamisella tarkoitetaan Purjeen muodon muuttamista veneen suorituskyvyn / käyttäytymisen parantamiseksi
Talvikunnossapidon laadun seuranta
 Talvikunnossapidon laadun seuranta Taisto Haavasoja Sisällys kitka liukkauden mittarina kitkan mittauksen perusteet kiihtyvyyteen perustuvat mittarit µtec Friction Meter MµMS Mobile Friction Measurement
Talvikunnossapidon laadun seuranta Taisto Haavasoja Sisällys kitka liukkauden mittarina kitkan mittauksen perusteet kiihtyvyyteen perustuvat mittarit µtec Friction Meter MµMS Mobile Friction Measurement
Liike ja voima. Kappaleiden välisiä vuorovaikutuksia ja niistä aiheutuvia liikeilmiöitä
 Liike ja voima Kappaleiden välisiä vuorovaikutuksia ja niistä aiheutuvia liikeilmiöitä Tasainen liike Nopeus on fysiikan suure, joka kuvaa kuinka pitkän matkan kappale kulkee tietyssä ajassa. Nopeus voidaan
Liike ja voima Kappaleiden välisiä vuorovaikutuksia ja niistä aiheutuvia liikeilmiöitä Tasainen liike Nopeus on fysiikan suure, joka kuvaa kuinka pitkän matkan kappale kulkee tietyssä ajassa. Nopeus voidaan
FYSIIKAN HARJOITUSTEHTÄVIÄ
 FYSIIKAN HARJOITUSTEHTÄVIÄ MEKANIIKKA Nopeus ja keskinopeus 6. Auto kulkee 114 km matkan tunnissa ja 13 minuutissa. Mikä on auton keskinopeus: a) Yksikössä km/h 1. Jauhemaalaamon kuljettimen nopeus on
FYSIIKAN HARJOITUSTEHTÄVIÄ MEKANIIKKA Nopeus ja keskinopeus 6. Auto kulkee 114 km matkan tunnissa ja 13 minuutissa. Mikä on auton keskinopeus: a) Yksikössä km/h 1. Jauhemaalaamon kuljettimen nopeus on
PIEKSÄMÄEN MELUSELVITYKSEN MELUMITTAUKSET
 FCG Finnish Consulting Group Oy Keski-Savon ympäristötoimi PIEKSÄMÄEN MELUSELVITYKSEN MELUMITTAUKSET Raportti 171905-P11889 30.11.2010 FCG Finnish Consulting Group Oy Raportti I 30.11.2010 SISÄLLYSLUETTELO
FCG Finnish Consulting Group Oy Keski-Savon ympäristötoimi PIEKSÄMÄEN MELUSELVITYKSEN MELUMITTAUKSET Raportti 171905-P11889 30.11.2010 FCG Finnish Consulting Group Oy Raportti I 30.11.2010 SISÄLLYSLUETTELO
KUITUPUUN KESKUSKIINTOMITTAUKSEN FUNKTIOINTI
 KUITUPUUN KESKUSKIINTOMITTAUKSEN FUNKTIOINTI Asko Poikela Samuli Hujo TULOSKALVOSARJAN SISÄLTÖ I. Vanha mittauskäytäntö -s. 3-5 II. Keskusmuotolukujen funktiointi -s. 6-13 III.Uusi mittauskäytäntö -s.
KUITUPUUN KESKUSKIINTOMITTAUKSEN FUNKTIOINTI Asko Poikela Samuli Hujo TULOSKALVOSARJAN SISÄLTÖ I. Vanha mittauskäytäntö -s. 3-5 II. Keskusmuotolukujen funktiointi -s. 6-13 III.Uusi mittauskäytäntö -s.
Sodar tuulimittaustekniikka
 Sodar tuulimittaustekniikka Energiamessut Tampereella 26.10.2010 Erkki Haapanen, DI erkki.haapanen(at)tuulitaito.fi Sodar - äänitutka Sodar sonic radar Sodar mittaa äänipulssin avulla tuulen nopeutta ja
Sodar tuulimittaustekniikka Energiamessut Tampereella 26.10.2010 Erkki Haapanen, DI erkki.haapanen(at)tuulitaito.fi Sodar - äänitutka Sodar sonic radar Sodar mittaa äänipulssin avulla tuulen nopeutta ja
Mittaustulosten tilastollinen käsittely
 Mittaustulosten tilastollinen käsittely n kertaa toistetun mittauksen tulos lasketaan aritmeettisena keskiarvona n 1 x = x i n i= 1 Mittaustuloksen hajonnasta aiheutuvaa epävarmuutta kuvaa keskiarvon keskivirhe
Mittaustulosten tilastollinen käsittely n kertaa toistetun mittauksen tulos lasketaan aritmeettisena keskiarvona n 1 x = x i n i= 1 Mittaustuloksen hajonnasta aiheutuvaa epävarmuutta kuvaa keskiarvon keskivirhe
Luento 2: Liikkeen kuvausta
 Luento 2: Liikkeen kuvausta Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Luennon sisältö Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Liikkeen ratkaisu kiihtyvyydestä
Luento 2: Liikkeen kuvausta Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Luennon sisältö Suoraviivainen liike integrointi Kinematiikkaa yhdessä dimensiossa Liikkeen ratkaisu kiihtyvyydestä
XXIII Keski-Suomen lukiolaisten matematiikkakilpailu 23.1.2014, tehtävien ratkaisut
 XXIII Keski-Suomen lukiolaisten matematiikkakilpailu 23.1.2014, tehtävien ratkaisut 1. Avaruusalus sijaitsee tason origossa (0, 0) ja liikkuu siitä vakionopeudella johonkin suuntaan, joka ei muutu. Tykki
XXIII Keski-Suomen lukiolaisten matematiikkakilpailu 23.1.2014, tehtävien ratkaisut 1. Avaruusalus sijaitsee tason origossa (0, 0) ja liikkuu siitä vakionopeudella johonkin suuntaan, joka ei muutu. Tykki
Diplomi-insinöörien ja arkkitehtien yhteisvalinta - dia-valinta 2013 Insinöörivalinnan fysiikan koe 29.5.2013, malliratkaisut
 A1 Ampumahiihtäjä ampuu luodin vaakasuoraan kohti maalitaulun keskipistettä. Luodin lähtönopeus on v 0 = 445 m/s ja etäisyys maalitauluun s = 50,0 m. a) Kuinka pitkä on luodin lentoaika? b) Kuinka kauaksi
A1 Ampumahiihtäjä ampuu luodin vaakasuoraan kohti maalitaulun keskipistettä. Luodin lähtönopeus on v 0 = 445 m/s ja etäisyys maalitauluun s = 50,0 m. a) Kuinka pitkä on luodin lentoaika? b) Kuinka kauaksi
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin tutkinnon ratkaisut
 Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 21.4.2017 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 21.4.2017 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Suomen Navigaatioliitto Finlands Navigationsförbund rf Saaristomerenkulkuopin tutkinto 19.4.2013
 1 Suomen Navigaatioliitto Finlands Navigationsförbund rf Saaristomerenkulkuopin tutkinto 19.4.2013 Tutkinnossa käytetty moottorivene on 13 metriä pitkä, sen syväys on 1,2 metriä ja korkeus 3,4 metriä.
1 Suomen Navigaatioliitto Finlands Navigationsförbund rf Saaristomerenkulkuopin tutkinto 19.4.2013 Tutkinnossa käytetty moottorivene on 13 metriä pitkä, sen syväys on 1,2 metriä ja korkeus 3,4 metriä.
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin tutkinnon ratkaisut
 Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 14.12.2007 tutkinnon ratkaisut Tehtävät on ratkaistu Microsoft PowerPoint ohjelmalla. Karttakuvat ovat skannattuja kuvia harjoitusmerikartasta
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 14.12.2007 tutkinnon ratkaisut Tehtävät on ratkaistu Microsoft PowerPoint ohjelmalla. Karttakuvat ovat skannattuja kuvia harjoitusmerikartasta
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin tutkinnon ratkaisut
 Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 25.04.2014 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 25.04.2014 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Kojemeteorologia. Sami Haapanala syksy Fysiikan laitos, Ilmakehätieteiden osasto
 Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Yläilmakehän luotaukset Synoptiset säähavainnot antavat tietoa meteorologisista parametrestä vain maan pinnalla Ilmakehän
Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Yläilmakehän luotaukset Synoptiset säähavainnot antavat tietoa meteorologisista parametrestä vain maan pinnalla Ilmakehän
Tuulimittausten merkitys ja mahdollisuudet tuulipuiston suunnittelussa ja käytössä
 Tuulimittausten merkitys ja mahdollisuudet tuulipuiston suunnittelussa ja käytössä Energiamessut 2010 Tampere Erkki Haapanen, DI erkki.haapanen(at)tuulitaito.fi Miksi tämä esitys Suomessa yleisin tuulivoimalan
Tuulimittausten merkitys ja mahdollisuudet tuulipuiston suunnittelussa ja käytössä Energiamessut 2010 Tampere Erkki Haapanen, DI erkki.haapanen(at)tuulitaito.fi Miksi tämä esitys Suomessa yleisin tuulivoimalan
Suomen Navigaatioliitto Finlands Navigationsförbund rf Saaristomerenkulkuopin tutkinnon 10.12.2004 tehtävien ratkaisu
 1 Suomen Navigaatioliitto Finlands Navigationsförbund rf Saaristomerenkulkuopin tutkinnon 10.12.2004 tehtävien ratkaisu Tehtävät on ratkaistu Microsoft PowerPoint ohjelmalla. Apuna on käytetty Carta Marina
1 Suomen Navigaatioliitto Finlands Navigationsförbund rf Saaristomerenkulkuopin tutkinnon 10.12.2004 tehtävien ratkaisu Tehtävät on ratkaistu Microsoft PowerPoint ohjelmalla. Apuna on käytetty Carta Marina
AIHEET. ään trimmiohjeet omaan veneeseen. Miten kehitetää. Sailsillaon tarjolla suorituskyvyn parantamisen apuvälineiksi nopeiden purjeiden
 AIHEET Miten kehitetää ään trimmiohjeet omaan veneeseen MitäNorth Sailsillaon tarjolla suorituskyvyn parantamisen apuvälineiksi nopeiden purjeiden lisäksi Trimmiohjeet = Muistilista Kaaos Harmonia Parhaan
AIHEET Miten kehitetää ään trimmiohjeet omaan veneeseen MitäNorth Sailsillaon tarjolla suorituskyvyn parantamisen apuvälineiksi nopeiden purjeiden lisäksi Trimmiohjeet = Muistilista Kaaos Harmonia Parhaan
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin tutkinnon ratkaisut. Rannikkomerenkulkuoppi
 Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 20.4.2018 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 20.4.2018 tutkinnon ratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Ene-58.4139 LVI-tekniikan mittaukset ILMAN TILAVUUSVIRRAN MITTAUS TYÖOHJE
 Ene-58.4139 LVI-tekniikan mittaukset ILMAN TILAVUUSVIRRAN MITTAUS TYÖOHJE Aalto yliopisto LVI-tekniikka 2013 SISÄLLYSLUETTELO TILAVUUSVIRRAN MITTAUS...2 1 HARJOITUSTYÖN TAVOITTEET...2 2 MITTAUSJÄRJESTELY
Ene-58.4139 LVI-tekniikan mittaukset ILMAN TILAVUUSVIRRAN MITTAUS TYÖOHJE Aalto yliopisto LVI-tekniikka 2013 SISÄLLYSLUETTELO TILAVUUSVIRRAN MITTAUS...2 1 HARJOITUSTYÖN TAVOITTEET...2 2 MITTAUSJÄRJESTELY
1.4 Suhteellinen liike
 Suhteellisen liikkeen ensimmäinen esimerkkimme on joskus esitetty kompakysymyksenäkin. Esimerkki 5 Mihin suuntaan ja millä nopeudella liikkuu luoti, joka ammutaan suihkukoneesta mahdollisimman suoraan
Suhteellisen liikkeen ensimmäinen esimerkkimme on joskus esitetty kompakysymyksenäkin. Esimerkki 5 Mihin suuntaan ja millä nopeudella liikkuu luoti, joka ammutaan suihkukoneesta mahdollisimman suoraan
Kertaus. Integraalifunktio ja integrointi. 2( x 1) 1 2x. 3( x 1) 1 (3x 1) KERTAUSTEHTÄVIÄ. K1. a)
 1 2x. 3( x 1) 1 (3x 1) KERTAUSTEHTÄVIÄ. K1. a)") Juuri 9 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 5.5.6 Kertaus Integraalifunktio ja integrointi KERTAUSTEHTÄVIÄ K. a) ( )d C C b) c) d e e C cosd cosd sin C K. Funktiot F ja F ovat saman
Juuri 9 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 5.5.6 Kertaus Integraalifunktio ja integrointi KERTAUSTEHTÄVIÄ K. a) ( )d C C b) c) d e e C cosd cosd sin C K. Funktiot F ja F ovat saman
YMPÄRISTÖMELUN MITTAUSRAPORTTI
 17 Raportti PR-Y1934 Naantalin kaupunki Turku 7.8.2012 Kirsti Junttila Sivu 1 (7) YMPÄRISTÖMELUN MITTAUSRAPORTTI Tonester Oy, Rymättylä Mittaukset 28.6., 30.7. ja 2.8.2012 Raportin vakuudeksi Jani Kankare
17 Raportti PR-Y1934 Naantalin kaupunki Turku 7.8.2012 Kirsti Junttila Sivu 1 (7) YMPÄRISTÖMELUN MITTAUSRAPORTTI Tonester Oy, Rymättylä Mittaukset 28.6., 30.7. ja 2.8.2012 Raportin vakuudeksi Jani Kankare
Äänellä vauhtia robottiin
 Äänellä vauhtia robottiin Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla robotti, joka väistää esteitä ja kulkee sitä nopeampaa mitä kovempi ääni sen lähistöllä on. Robotti tunnistaa esteet
Äänellä vauhtia robottiin Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla robotti, joka väistää esteitä ja kulkee sitä nopeampaa mitä kovempi ääni sen lähistöllä on. Robotti tunnistaa esteet
LABORAATIO 1, YLEISMITTARI JA PERUSMITTAUKSET
 KAJAANIN AMMATTIKORKEAKOULU Tekniikan ja liikenteen ala VAHVAVIRTATEKNIIKAN LABORAATIOT H.Honkanen LABORAATIO 1, YLEISMITTARI JA PERUSMITTAUKSET YLEISTÄ YLEISMITTARIN OMINAISUUKSISTA: Tässä laboratoriotyössä
KAJAANIN AMMATTIKORKEAKOULU Tekniikan ja liikenteen ala VAHVAVIRTATEKNIIKAN LABORAATIOT H.Honkanen LABORAATIO 1, YLEISMITTARI JA PERUSMITTAUKSET YLEISTÄ YLEISMITTARIN OMINAISUUKSISTA: Tässä laboratoriotyössä
= 6, Nm 2 /kg kg 71kg (1, m) N. = 6, Nm 2 /kg 2 7, kg 71kg (3, m) N
 N. = 6, Nm 2 /kg 2 7, kg 71kg (3, m) N") t. 1 Auringon ja kuun kohdistamat painovoimat voidaan saada hyvin tarkasti laksettua Newtonin painovoimalailla, koska ne ovat pallon muotoisia. Junalle sillä saadaan selville suuruusluokka, joka riittää
t. 1 Auringon ja kuun kohdistamat painovoimat voidaan saada hyvin tarkasti laksettua Newtonin painovoimalailla, koska ne ovat pallon muotoisia. Junalle sillä saadaan selville suuruusluokka, joka riittää
Tarkastellaan tilannetta, jossa kappale B on levossa ennen törmäystä: v B1x = 0:
 8.4 Elastiset törmäykset Liike-energia ja liikemäärä säilyvät elastisissa törmäyksissä Vain konservatiiviset voimat vaikuttavat 1D-tilanteessa kappaleiden A ja B törmäykselle: 1 2 m Av 2 A1x + 1 2 m Bv
8.4 Elastiset törmäykset Liike-energia ja liikemäärä säilyvät elastisissa törmäyksissä Vain konservatiiviset voimat vaikuttavat 1D-tilanteessa kappaleiden A ja B törmäykselle: 1 2 m Av 2 A1x + 1 2 m Bv
(a) Potentiaali ja virtafunktiot saadaan suoraan summaamalla lähteen ja pyörteen funktiot. Potentiaalifunktioksi
 Potentiaali ja virtafunktiot saadaan suoraan summaamalla lähteen ja pyörteen funktiot. Potentiaalifunktioksi") Tehtävä 1 Tornadon virtauskenttää voidaan approksimoida kaksiulotteisen nielun ja pyörteen summana Oleta, että nielun voimakkuus on m < ja pyörteen voimakkuus on > (a Määritä tornadon potentiaali- ja virtafunktiot
Tehtävä 1 Tornadon virtauskenttää voidaan approksimoida kaksiulotteisen nielun ja pyörteen summana Oleta, että nielun voimakkuus on m < ja pyörteen voimakkuus on > (a Määritä tornadon potentiaali- ja virtafunktiot
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 19.4.2013 tutkinnon malliratkaisut
 Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 19.4.2013 tutkinnon malliratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm.
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 19.4.2013 tutkinnon malliratkaisut Tutkinto tehdään 12 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm.
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin tutkinnon ratkaisut
 Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 15.04.2011 tutkinnon ratkaisut Harjoitus tehdään 13 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 15.04.2011 tutkinnon ratkaisut Harjoitus tehdään 13 m pituisella merikelpoisella moottoriveneellä, jossa on varusteina mm. pääkompassi,
Opetusmateriaali. Tutkimustehtävien tekeminen
 Opetusmateriaali Tämän opetusmateriaalin tarkoituksena on opettaa kiihtyvyyttä mallintamisen avulla. Toisena tarkoituksena on hyödyntää pikkuautoa ja lego-ukkoa fysiikkaan liittyvän ahdistuksen vähentämiseksi.
Opetusmateriaali Tämän opetusmateriaalin tarkoituksena on opettaa kiihtyvyyttä mallintamisen avulla. Toisena tarkoituksena on hyödyntää pikkuautoa ja lego-ukkoa fysiikkaan liittyvän ahdistuksen vähentämiseksi.
Navigointi/suunnistus
 Navigointi/suunnistus Aiheita Kartan ja kompassin käyttö Mittakaavat Koordinaatistot Karttapohjoinen/neulapohjoinen Auringon avulla suunnistaminen GPS:n käyttö Reitin/jäljen luonti tietokoneella Reittipisteet
Navigointi/suunnistus Aiheita Kartan ja kompassin käyttö Mittakaavat Koordinaatistot Karttapohjoinen/neulapohjoinen Auringon avulla suunnistaminen GPS:n käyttö Reitin/jäljen luonti tietokoneella Reittipisteet
Videotoisto Nexus 7 tableteilla: Android 4.4 KitKat selvästi edellistä versiota heikompi
 Videotoisto Nexus 7 tableteilla: Android 4.4 KitKat selvästi edellistä versiota heikompi - Android 4.3 Jelly Bean ja 4.4 Kitkat käyttöjärjestelmien videotoiston suorituskyvyn vertailu Nexus 7 tabletilla
Videotoisto Nexus 7 tableteilla: Android 4.4 KitKat selvästi edellistä versiota heikompi - Android 4.3 Jelly Bean ja 4.4 Kitkat käyttöjärjestelmien videotoiston suorituskyvyn vertailu Nexus 7 tabletilla
Verkkodatalehti FLOWSIC60 KAASUN VIRTAUSMITTARIT
 Verkkodatalehti A B C D E F H I J K L M N O P Q R S T Tilaustiedot ANVIRTAUSMITTAUS KAIVOSSOVEL- Tyyppi Tuotenumero Pyynnöstä Tuotteen tarkat laitespesifikaatiot ja suorituskykytiedot voivat olla vaihdella.
Verkkodatalehti A B C D E F H I J K L M N O P Q R S T Tilaustiedot ANVIRTAUSMITTAUS KAIVOSSOVEL- Tyyppi Tuotenumero Pyynnöstä Tuotteen tarkat laitespesifikaatiot ja suorituskykytiedot voivat olla vaihdella.
Harjoitustyö Hidastuva liike Biljardisimulaatio
 Harjoitustyö Hidastuva liike Biljardisimulaatio Tietotekniikka Ammattialan matemaattiset menetelmät Tommi Sukuvaara Nico Hätönen, Joni Toivonen, Tomi Poutiainen INTINU13A6 Arviointi Päiväys Arvosana Opettajan
Harjoitustyö Hidastuva liike Biljardisimulaatio Tietotekniikka Ammattialan matemaattiset menetelmät Tommi Sukuvaara Nico Hätönen, Joni Toivonen, Tomi Poutiainen INTINU13A6 Arviointi Päiväys Arvosana Opettajan
Työ 5: Putoamiskiihtyvyys
 Työ 5: Putoamiskiihtyvyys Työryhmä: Tehty (pvm): Hyväksytty (pvm): Hyväksyjä: 1. Tavoitteet Työssä määritetään putoamiskiihtyvyys kolmella eri tavalla. Ennakko-oletuksena mietitään, pitäisikö jollain tavoista
Työ 5: Putoamiskiihtyvyys Työryhmä: Tehty (pvm): Hyväksytty (pvm): Hyväksyjä: 1. Tavoitteet Työssä määritetään putoamiskiihtyvyys kolmella eri tavalla. Ennakko-oletuksena mietitään, pitäisikö jollain tavoista
Puisten kävelysiltojen värähtelymittaukset
 Puisten kävelysiltojen värähtelymittaukset Puupäivä, 28.11.2013, Wanha Satama, Helsinki Asko Talja, VTT Timo Tirkkonen, Liikennevirasto 2 Esityksen sisältö Tausta ja tavoitteet Mitatut sillat Koeohjelma
Puisten kävelysiltojen värähtelymittaukset Puupäivä, 28.11.2013, Wanha Satama, Helsinki Asko Talja, VTT Timo Tirkkonen, Liikennevirasto 2 Esityksen sisältö Tausta ja tavoitteet Mitatut sillat Koeohjelma
Dynaamiset regressiomallit
 MS-C2128 Ennustaminen ja Aikasarja-analyysi, Heikki Seppälä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Syksy 2015 Viikko 6: 1 Kalmanin suodatin Aiemmin käsitellyt
MS-C2128 Ennustaminen ja Aikasarja-analyysi, Heikki Seppälä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Syksy 2015 Viikko 6: 1 Kalmanin suodatin Aiemmin käsitellyt
Merenkulku. Onnea matkaan aikaa 10 minuuttia
 Merenkulku Onnea matkaan aikaa 10 minuuttia Tehtävä 1 Minkälaisen äänimerkin konealus antaa, kun se liikkuu veden halki, näkyvyyden ollessa rajoittunut? A. Yksi lyhyt enintään 1min välein B. Yksi pitkä
Merenkulku Onnea matkaan aikaa 10 minuuttia Tehtävä 1 Minkälaisen äänimerkin konealus antaa, kun se liikkuu veden halki, näkyvyyden ollessa rajoittunut? A. Yksi lyhyt enintään 1min välein B. Yksi pitkä
Länsiharjun koulu 4a
 Länsiharjun koulu 4a Kuinka lentokone pysyy ilmassa? Lentokoneen moottori Helsinki-Vantaan lentokentällä. Marius Kolu Olimme luonnossa ja tutkimme kuvia. Jokaisella ryhmällä heräsi kysymyksiä kuvista.
Länsiharjun koulu 4a Kuinka lentokone pysyy ilmassa? Lentokoneen moottori Helsinki-Vantaan lentokentällä. Marius Kolu Olimme luonnossa ja tutkimme kuvia. Jokaisella ryhmällä heräsi kysymyksiä kuvista.
3.4 Liike-energiasta ja potentiaalienergiasta
 Työperiaatteeksi (the work-energy theorem) kutsutaan sitä että suljetun systeemin liike-energian muutos Δ on voiman systeemille tekemä työ W Tämä on yksi konservatiivisen voiman erityistapaus Työperiaate
Työperiaatteeksi (the work-energy theorem) kutsutaan sitä että suljetun systeemin liike-energian muutos Δ on voiman systeemille tekemä työ W Tämä on yksi konservatiivisen voiman erityistapaus Työperiaate
AMMATTIKORKEAKOULUJEN LUONNONVARA- JA YMPÄRISTÖALAN VALINTAKOE
 AMMATTIKORKEAKOULUJEN LUONNONVARA- JA YMPÄRISTÖALAN VALINTAKOE Matematiikan koe 1.6.2016 Nimi: Henkilötunnus: VASTAUSOHJEET 1. Koeaika on 2 tuntia (klo 12.00 14.00). Kokeesta saa poistua aikaisintaan klo
AMMATTIKORKEAKOULUJEN LUONNONVARA- JA YMPÄRISTÖALAN VALINTAKOE Matematiikan koe 1.6.2016 Nimi: Henkilötunnus: VASTAUSOHJEET 1. Koeaika on 2 tuntia (klo 12.00 14.00). Kokeesta saa poistua aikaisintaan klo
Kilpapurjehduksesta. MP:n kilpakoulu 6.3.2006 Jussi Heikonen, EPS. 6.3.2006 MP:n kilpakoulu, Jussi Heikonen, EPS 1
 Kilpapurjehduksesta MP:n kilpakoulu 6.3.2006 Jussi Heikonen, EPS 6.3.2006 MP:n kilpakoulu, Jussi Heikonen, EPS 1 Taustaa E-jolla 505 82-88 88-94 Albin Express (1-tyyppi, LYS, IMS) 505 99-04 05 1-tyyppiratapurjehtija!
Kilpapurjehduksesta MP:n kilpakoulu 6.3.2006 Jussi Heikonen, EPS 6.3.2006 MP:n kilpakoulu, Jussi Heikonen, EPS 1 Taustaa E-jolla 505 82-88 88-94 Albin Express (1-tyyppi, LYS, IMS) 505 99-04 05 1-tyyppiratapurjehtija!
Trestima Oy Puuston mittauksia
 Koostanut Essi Rasimus ja Elina Viro Opettajalle Trestima Oy Puuston mittauksia Kohderyhmä: 9-luokka Esitiedot: ympyrä, ympyrän piiri, halkaisija ja pinta-ala, lieriön tilavuus, yhdenmuotoisuus, yksikkömuunnokset
Koostanut Essi Rasimus ja Elina Viro Opettajalle Trestima Oy Puuston mittauksia Kohderyhmä: 9-luokka Esitiedot: ympyrä, ympyrän piiri, halkaisija ja pinta-ala, lieriön tilavuus, yhdenmuotoisuus, yksikkömuunnokset
Esimerkki. Lighting calculation. Today: 63 x HPS 400W (PW 480W) -> total PW= 30,2 kw.
 -> total PW= 30,2 kw.") Esimerkki Lighting calculation Today: 63 x HPS 400W (PW 480W) -> total PW= 30,2 kw. Solljus installation: 44 x Solljus Zenith 35W (PW 34W) -> total PW = 5kW. Kontaktperson: Ordernr.: Firma: Kundnr.: Päivämäärä:
Esimerkki Lighting calculation Today: 63 x HPS 400W (PW 480W) -> total PW= 30,2 kw. Solljus installation: 44 x Solljus Zenith 35W (PW 34W) -> total PW = 5kW. Kontaktperson: Ordernr.: Firma: Kundnr.: Päivämäärä:
LIITE 1 VIRHEEN ARVIOINNISTA
 Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin tutkinnon ratkaisut
 Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 15.12.2006 tutkinnon ratkaisut Tehtävät on ratkaistu Microsoft PowerPoint ohjelmalla. Karttakuvat ovat skannattuja kuvia harjoitusmerikartasta
Suomen Navigaatioliitto Finlands Navigationsförbund Rannikkomerenkulkuopin 15.12.2006 tutkinnon ratkaisut Tehtävät on ratkaistu Microsoft PowerPoint ohjelmalla. Karttakuvat ovat skannattuja kuvia harjoitusmerikartasta
Purjehdi Vegalla - Vinkki nro 2
 Purjehdi Vegalla 1 1 Purjehdi Vegalla - Vinkki nro 2 Tuulen on puhallettava purjeita pitkin - ei niitä päin! Vielä menee pitkä aika, kunnes päästään käytännön harjoituksiin, joten joudutaan vielä tyytymään
Purjehdi Vegalla 1 1 Purjehdi Vegalla - Vinkki nro 2 Tuulen on puhallettava purjeita pitkin - ei niitä päin! Vielä menee pitkä aika, kunnes päästään käytännön harjoituksiin, joten joudutaan vielä tyytymään
FYSIIKKA. Mekaniikan perusteita pintakäsittelijöille. Copyright Isto Jokinen; Käyttöoikeus opetuksessa tekijän luvalla. - Laskutehtävien ratkaiseminen
 FYSIIKKA Mekaniikan perusteita pintakäsittelijöille - Laskutehtävien ratkaiseminen - Nopeus ja keskinopeus - Kiihtyvyys ja painovoimakiihtyvyys - Voima - Kitka ja kitkavoima - Työ - Teho - Paine LASKUTEHTÄVIEN
FYSIIKKA Mekaniikan perusteita pintakäsittelijöille - Laskutehtävien ratkaiseminen - Nopeus ja keskinopeus - Kiihtyvyys ja painovoimakiihtyvyys - Voima - Kitka ja kitkavoima - Työ - Teho - Paine LASKUTEHTÄVIEN
Suomen Navigaatioliitto Finlands Navigationsförbund rf Saaristomerenkulkuopin tutkinnon tehtävien ratkaisu
 1 Suomen Navigaatioliitto Finlands Navigationsförbund rf Saaristomerenkulkuopin tutkinnon 20.04.2012 tehtävien ratkaisu Tutkinnossa käytetty moottorivene on 13 metriä pitkä, sen syväys on 1,2 metriä ja
1 Suomen Navigaatioliitto Finlands Navigationsförbund rf Saaristomerenkulkuopin tutkinnon 20.04.2012 tehtävien ratkaisu Tutkinnossa käytetty moottorivene on 13 metriä pitkä, sen syväys on 1,2 metriä ja
on hidastuvaa. Hidastuvuus eli negatiivinen kiihtyvyys saadaan laskevan suoran kulmakertoimesta, joka on siis
 Fys1, moniste 2 Vastauksia Tehtävä 1 N ewtonin ensimmäisen lain mukaan pallo jatkaa suoraviivaista liikettä kun kourun siihen kohdistama tukivoima (tässä tapauksessa ympyräradalla pitävä voima) lakkaa
Fys1, moniste 2 Vastauksia Tehtävä 1 N ewtonin ensimmäisen lain mukaan pallo jatkaa suoraviivaista liikettä kun kourun siihen kohdistama tukivoima (tässä tapauksessa ympyräradalla pitävä voima) lakkaa
Autonomisen liikkuvan koneen teknologiat. Hannu Mäkelä Navitec Systems Oy
 Autonomisen liikkuvan koneen teknologiat Hannu Mäkelä Navitec Systems Oy Autonomisuuden edellytykset itsenäinen toiminta ympäristön havainnointi ja mittaus liikkuminen ja paikannus toiminta mittausten
Autonomisen liikkuvan koneen teknologiat Hannu Mäkelä Navitec Systems Oy Autonomisuuden edellytykset itsenäinen toiminta ympäristön havainnointi ja mittaus liikkuminen ja paikannus toiminta mittausten
[MATEMATIIKKA, KURSSI 8]
![[MATEMATIIKKA, KURSSI 8]](/thumbs/30/14370320.jpg "[MATEMATIIKKA, KURSSI 8]") 2015 Puustinen, Sinn PYK [MATEMATIIKKA, KURSSI 8] Trigometrian ja avaruusgeometrian teoriaa, tehtäviä ja linkkejä peruskoululaisille Sisällysluettelo 8.1 PYTHAGORAAN LAUSE... 3 8.1.1 JOHDANTOTEHTÄVÄT 1-6...
2015 Puustinen, Sinn PYK [MATEMATIIKKA, KURSSI 8] Trigometrian ja avaruusgeometrian teoriaa, tehtäviä ja linkkejä peruskoululaisille Sisällysluettelo 8.1 PYTHAGORAAN LAUSE... 3 8.1.1 JOHDANTOTEHTÄVÄT 1-6...
Lineaarialgebra MATH.1040 / voima
 Lineaarialgebra MATH.1040 / voima 1 Seuraavaksi määrittelemme kaksi vektoreille määriteltyä tuloa; pistetulo ja. Määritelmät ja erilaiset tulojen ominaisuudet saattavat tuntua, sekavalta kokonaisuudelta.
Lineaarialgebra MATH.1040 / voima 1 Seuraavaksi määrittelemme kaksi vektoreille määriteltyä tuloa; pistetulo ja. Määritelmät ja erilaiset tulojen ominaisuudet saattavat tuntua, sekavalta kokonaisuudelta.
MEKANIIKAN TEHTÄVIÄ. Nostotyön suuruus ei riipu a) nopeudesta, jolla kappale nostetaan b) nostokorkeudesta c) nostettavan kappaleen massasta
 nopeudesta, jolla kappale nostetaan b) nostokorkeudesta c) nostettavan kappaleen massasta") MEKANIIKAN TEHTÄVIÄ Ympyröi oikea vaihtoehto. Normaali ilmanpaine on a) 1013 kpa b) 1013 mbar c) 1 Pa Kappaleen liike on tasaista, jos a) kappaleen paikka pysyy samana b) kappaleen nopeus pysyy samana
MEKANIIKAN TEHTÄVIÄ Ympyröi oikea vaihtoehto. Normaali ilmanpaine on a) 1013 kpa b) 1013 mbar c) 1 Pa Kappaleen liike on tasaista, jos a) kappaleen paikka pysyy samana b) kappaleen nopeus pysyy samana
Vedetään kiekkoa erisuuruisilla voimilla! havaitaan kiekon saaman kiihtyvyyden olevan suoraan verrannollinen käytetyn voiman suuruuteen
 4.3 Newtonin II laki Esim. jääkiekko märällä jäällä: pystysuuntaiset voimat kumoavat toisensa: jään kiekkoon kohdistama tukivoima n on yhtäsuuri, mutta vastakkaismerkkinen kuin kiekon paino w: n = w kitka
4.3 Newtonin II laki Esim. jääkiekko märällä jäällä: pystysuuntaiset voimat kumoavat toisensa: jään kiekkoon kohdistama tukivoima n on yhtäsuuri, mutta vastakkaismerkkinen kuin kiekon paino w: n = w kitka