Mallinnus taistelun voittamiseksi -
|
|
|
- Timo Koskinen
- 6 vuotta sitten
- Katselukertoja:
Transkriptio

1 Mallinnus taistelun voittamiseksi - Case ilmavoimat: Ilmasta-maahan -tehtävän suunnittelun tukeminen Kai Virtanen Systeemianalyysin laboratorio, Aalto Sotatekniikan laitos, MPKK kai.virtanen@aalto.fi


2 "JASSM-rynnäkköohjuksen onnistunut koeammunta Yhdysvalloissa" "Koeammunnat suoritettiin Yhdysvalloissa 5. Ja 9. maaliskuuta." " on osa ilmavoimien Hornetien kauaskantoista ilmasta maahan - täsmäaseistusta, joka integroitiin monitoimihävittäjiin osana vuosina toteutettua monitoimihävittäjien Mid-Life Upgrade 2 - elinkaaripäivitystä (MLU 2)." Lähde: Ilmavoimien tiedote

3 Ilta-Sanomat html
4 Ilmasta-maahan (A/G) -tehtävä Omat tukikohdat Ilmatorjunta (IT) -uhka Hävittäjä (A/A) -uhka Maalipiste Lähi-ilmatorjunta (IT) -uhka Ilmasta-maahan (A/G) -aseen laukaisupisteet
5 Lentokoneen reittioptimointitehtävä Nopea ja polttoainetaloudellinen reitti tukikohdasta laukaisupisteelle ja takaisin A/A- ja IT-uhkaa välttäen Omat tukikohdat Ilmatorjunta (IT) -uhka Hävittäjä (A/A) -uhka Ilmasta-maahan (A/G) -aseen laukaisupisteet
6 Ratkaisuprosessi Optimointi-simulointi 1. Tehtävän määrittely MONITAVOITEOPTIMOINTI Hylkää 2. Uhkamallit 3. Kriteerien painotus Optimireitin määräminen 5.Reitin evaluointi 4. Optimireitti Kriteerikustannukset SIMULOINTI Hyväksy 6. Ohjuslaukaisujen simulaatio optimireitillä Osumat/ hudit 7.Reitin evaluointi Hylkää Hyväksy Vertailu optimointitulosten kustanuksiin 8. Lopullinen reitti



7 Optimointi: Monitavoitteinen lyhimmän polun tehtävä Tarkastelualueen kuvaaminen verkkona Verkon solmut lentokoneen mahdollisia reittipisteitä Verkon kaaret mahdollisia siirtymiä reittipisteiden välillä Vaihtoehtoiset tukikohdat & laukaisupisteet Optimointikriteerit - kaarien kustannukset Kuljettu matka Polttoaineenkulutus Kuljettu matka IT-uhkan vaikutuksen alla Kuljettu matka A/A-uhkan vaikutuksen alla Optimireitti Kaaren kustannus = Painotettu summa kriteerikohtaisista kustannuksista Minimoi kaarien kokonaiskustannuksen

8 Optimointiverkon rakenne Solmuvälit vaaka- ja pystytasossa sekä kaarien lukumäärä lentokoneen suorituskyvyn ja laskentatarkkuuden perusteella Lentokoneen suorituskyvyn huomioiminen Minimi- ja maksimilentokorkeus Nousu- ja laskukyky Kääntymiskyky Maastomalli Solmut Kaaret vaakataso Kaaret pystytaso
9 Polttoaineenkulutus Polttoaineenkulutuksen mallinnus perustuu kulutukseen vaakalennossa sekä perusmoottorin ja jälkipolton kulutuksiin maksimiarvoilla eri korkeuksissa Maksimi nousu- ja laskukulmat eri korkeuksilla Tyypillinen A/G-varustus Vakio nopeus (Machin luku) Optimointikriteeri: kulutus merimailia kohti
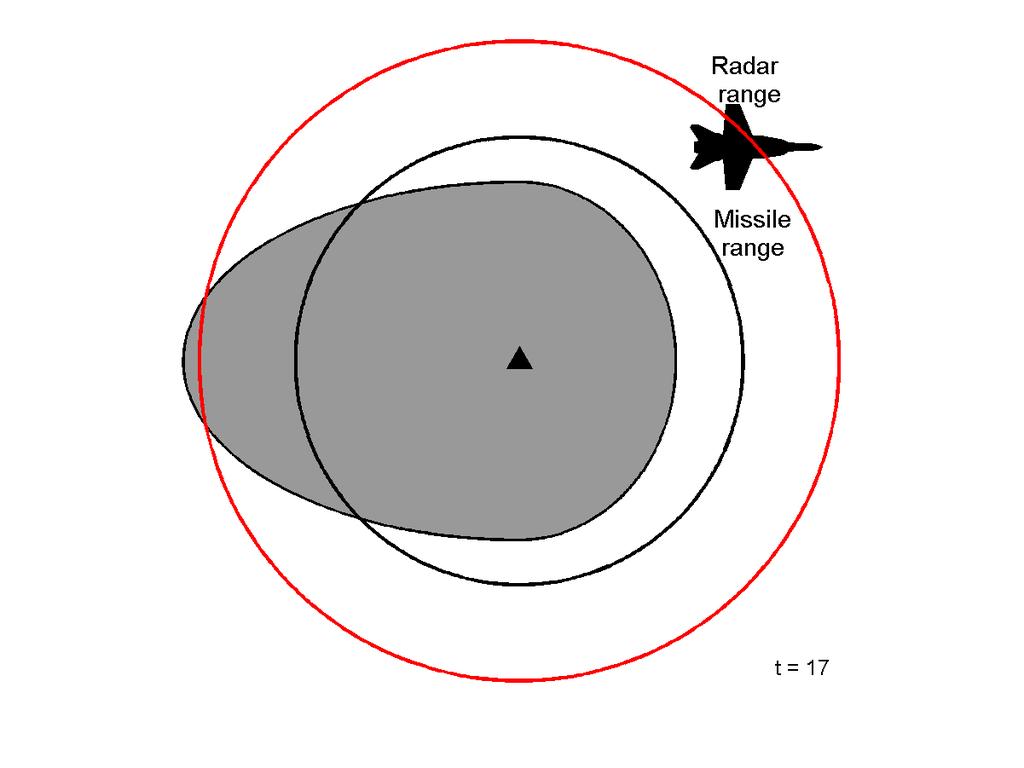
10 IT-uhka: Tutka- ja ohjuskantamat IT-järjestelmän kyky vaikuttaa lentokoneeseen Havaintokyvyn konservatiivinen kuvaus: Tutkakantama r 0 r h h a h r 2 k 2 e R 2 Maa 2rk R r θ h e Maa sin k R e Maa h a h h a k e R MAA θ r 0 = tutka"säteen" korkeus maksimikantamalla = antennin korkeus = ilman taitekerroin = maapallon säde = tutkan katvekulma = alakantama = IT-lavetti Kinemaattisen kyvyn konservatiivinen kuvaus: Ohjuskantama r M h MAX h MIN r M h MAX h MIN = ohjuksen kantama = ohjuksen maksimi lentokorkeus = ohjuksen minimi lentokorkeus

 Tutkan havaintotoden")
11 IT-uhka: Suuntariippuvuus Ohjuksen kyky saavuttaa lentokone riippuu lentokoneen tilasta => Launch acceptability region (LAR) Tutkan havaintotodennäköisyys, i.e., kyky havaita lentokone riippuu lentokoneen tutkapoikkipinta-alasta ja maastokatveista Optimointikriteeri: Lennetty matka IT-uhkan LAR:ssa, havaintotodennäköisyys tai näiden yhdistelmä LAR
12 IT-uhka: Suuntariippuvuus

13 A/A-uhka Vastapuoli havaitsee A/G-tehtävää toteuttavan lentokoneen => Torjuntahävittäjät A/A-uhka: Torjuntahävittäjien kyky saavuttaa A/G-lentokone Vastapuolen ilmavalvonta => Reagointitasa Optimointikriteeri: lennetty matka alueella, jonka torjuntahävittäjät voivat saavuttaa ennen A/G-lentokonetta Reagointitasa Reagointitasan sivuprofiili korkeus Hyökkäyssuunta etäisyys


14 A/A-uhka: Aikariippuvuus
15 Monitavoitteisen lyhimmän polun tehtävän ratkaiseminen A*-algoritmi Verkon dynaaminen generointi Suuntariippuvat kustannukset (IT-uhka) Lentokoneen suorituskykyrajoitteet Aikariippuvat kustannukset (A/A-uhka) Monitavoitteinen optimointitehtävä muunnetaan yhden tavoitteen tehtäväksi kriteeripainoilla w i w i kuvaa optimointikriteerin i suhteellista tärkeyttä min w MATKA *Kuljettu matka + w POLTTOAINE *Polttoaineenkulutus + w IT *IT-uhka + w AA *A/A-uhka


16 Simulointi: IT-ohjusten aiheuttama uhka Ohjuksen lennon simulointi Ohjuksen kinemaattinen kyky saavuttaa optimireittiä lentävä lentokone Ohjusmalli Viiden vapausasteen liikeyhtälöt Ohjuksella täydellinen tieto lentokoneen tilasta Ohjuslaukaisu lyhyen aikavälin välein, kun lentokone on IT-järjestelmän tutkakantaman sisällä IT-järjestelmän tutkan havaintotodennäköisyys > Raja-arvo Optimireitin evaluointi Simulointi- ja optimointitulosten eroavaisuus => Optimoinnissa käytettävien uhkamallien päivitys

 IT-järjestelmät")
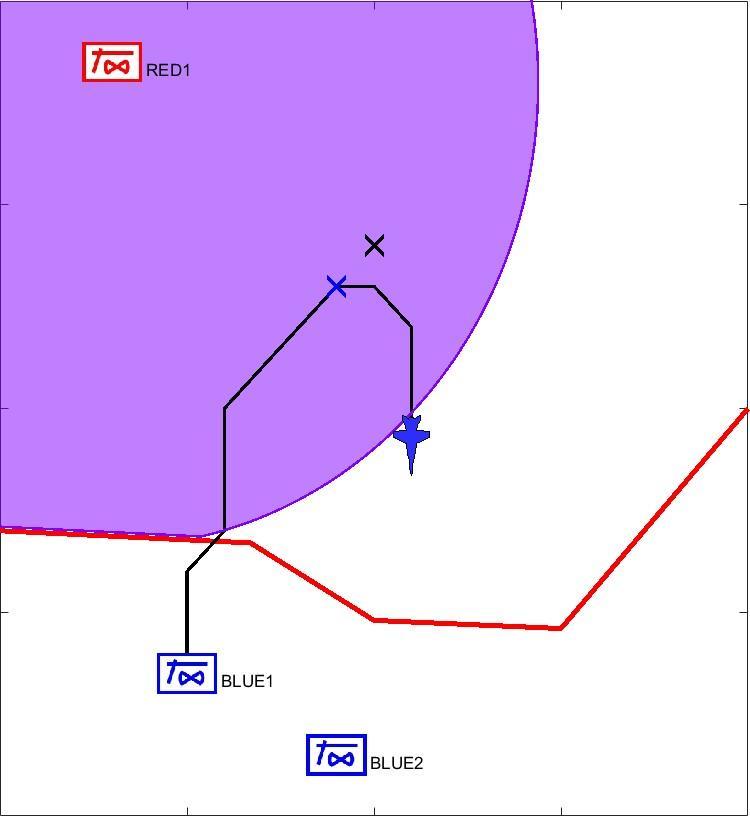
17 Esimerkki A/G-tehtävä Resurssit Tukikohdat (A/G) Lentokieltoalueet Kohteet Maalipisteet A/G-asejärjestelmät => Käyvät laukaisupisteet Vastustaja Tukikohdat (A/A) IT-järjestelmät Valvonta => Reagointitasa


18 Esimerkki Optimireitti Kustannukset Menoreitti Paluureitti Altistukset IT- ja A/A -uhkille Altistukset ITjärjestelmittäin ja A/Atukikohdittain Optimireitin laukaisupiste Alue, jolle A/A-uhka ehtii ennen lentokonetta



19 Esimerkki Ohjussimulaatio Ohimennyt IT-ohjus Animaatio Laukaisujen tiedot Osunut ITohjus Laukaisupiste
20 Ilmasta-maahan (A/G) -tehtävä Omat tukikohdat Ilmatorjunta (IT) -uhka Hävittäjä (A/A) -uhka Maalipiste Lähi-ilmatorjunta (IT) -uhka Ilmasta-maahan (A/G) -aseen laukaisupisteet
21 Ilmasta-maahan (A/G) -tehtävä Omat tukikohdat Ilmatorjunta (IT) -uhka Hävittäjä (A/A) -uhka Maalipiste Lähi-ilmatorjunta (IT) -uhka Ilmasta-maahan (A/G) -aseen laukaisupisteet
22 Ilmasta-maahan (A/G) -aseen reittioptimointitehtävä Lentokoneen reittioptimointi => Laukaisupisteiden järjestys lentokoneen selviytymisen kannalta A/G-aseen reitti heittoliikkeenä tai "optimoituna" laukaisupisteeltä maalipisteeseen Lähi-IT-uhka Kinemaattinen kyky Havaintokyky Sijaintitiedon epätarkkuus => Laukaisupisteiden paremmuusjärjestys A/G-aseen selviytymisen kannalta Maalipiste Lähi-ilmatorjunta (IT) -uhka Ilmasta-maahan (A/G) -aseen laukaisupisteet


23 Lähi-IT:n sijaintijakauma Tiedustelu/asiantuntijatieto alueella olevista asejärjestelmistä Tyypit ja lukumäärät Alueen maankäyttö ja kulkukelpoisuus Näkyvyys oletettuun hyökkäyssuuntaan Korkeusmalli ja puustonpituus => Mahdolliset ja todennäköiset asejärjestelmien sijainnit Maankäyttö Korkeusmalli Sijaintijakaumat + =




24 Lähi-IT:n havaintokyky ja kinemaattinen kyky Sijaintijakaumat Kyvyt mahdollisista sijainneista Odotusarvoiset kyvyt reitin pisteessä + = Odotusarvoiset kyvyt A/G-aseen retillä => => Laukaisupisteiden paremmuusjärjestys
25 Lentokoneen ja aseen reittien yhteistarkastelu 1/2 1) Maalipiste ja A/G-aseen tyyppi => Asejärjestelmän mahdollistamat laukaisupisteet X 2) Aseen reittioptimointi => Käyvät laukaisupisteet X Tarvittaessa aseen reittitarkastelu hyödyntäen lentokoneen reittioptimointimenettelyitä Maalipiste Lähi-ilmatorjunta (IT) -uhka Ilmasta-maahan (A/G) -aseen laukaisupisteet
26 Lentokoneen ja aseen reittien yhteistarkastelu 2/2 3) Lentokoneen reittioptimointi huomioiden käyvät laukaisupisteet Omat tukikohdat Tarvittaessa lentokoneen reittitarkastelu hyödyntäen aseen reittioptimointimenettelyitä Ilmatorjunta (IT) -uhka Hävittäjä (A/A) -uhka
27 Mallit taistelun voittamisen tuessa Tieteenala: Operaatiotutkimus / Operaatioanalyysi Minkä ongelman ratkaisemisen tukeen mallia käytetään? Oleellista! Yleiskäyttöisyyden harha mallinnuksessa Malleille tarvitaan keihäänkärkikäyttö - geneeriset" mallit eivät toimi Mallimonsterit hyödyttömiä Oletukset, rajaukset ja mittakaavat tehtävä läpinäkyviksi Määräytyvät mallin käyttötarpeesta keskeinen rooli! Tulosten ymmärrettävyys ja perusteltavuus Miten käytetty tietopohja on kerätty? Päätöstä ei voida siirtää mallille malli tukee päätöksentekoa "Essentially, all models are wrong, but some are useful" G. Bo
28 Diplomityöt: Heikki Puustinen "Military Aircraft Routing with Multi-Objective Network Optimization and Simulation" sal.aalto.fi/publications/pdf-files/tpuu13_public.pdf Riku Hyytiäinen "Evaluating Trajectories of Air-to-Ground Weapons using a Probability Map for Surface-to-Air Threats" sal.aalto.fi/publications/pdf-files/thyy17_public.pdf
Joonas Haapala Ohjaaja: DI Heikki Puustinen Valvoja: Prof. Kai Virtanen
 Hävittäjälentokoneen reitin suunnittelussa käytettävän dynaamisen ja monitavoitteisen verkko-optimointitehtävän ratkaiseminen A*-algoritmilla (valmiin työn esittely) Joonas Haapala 8.6.2015 Ohjaaja: DI
Hävittäjälentokoneen reitin suunnittelussa käytettävän dynaamisen ja monitavoitteisen verkko-optimointitehtävän ratkaiseminen A*-algoritmilla (valmiin työn esittely) Joonas Haapala 8.6.2015 Ohjaaja: DI
Verkko-optimointiin perustuva torjuntatasan laskenta mellakkapoliisin resurssien kohdentamisessa (valmiin työn esittely) Paavo Kivistö
 Paavo Kivistö") Verkko-optimointiin perustuva torjuntatasan laskenta mellakkapoliisin resurssien kohdentamisessa (valmiin työn esittely) Paavo Kivistö 21.01.2013 Ohjaaja: Kai Virtanen Valvoja: Raimo P. Hämäläinen Työn
Verkko-optimointiin perustuva torjuntatasan laskenta mellakkapoliisin resurssien kohdentamisessa (valmiin työn esittely) Paavo Kivistö 21.01.2013 Ohjaaja: Kai Virtanen Valvoja: Raimo P. Hämäläinen Työn
Harjoitus 4: Matlab - Optimization Toolbox
 Harjoitus 4: Matlab - Optimization Toolbox Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Optimointimallin muodostaminen
Harjoitus 4: Matlab - Optimization Toolbox Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Optimointimallin muodostaminen
Optimoinnin sovellukset
 Optimoinnin sovellukset Timo Ranta Tutkijatohtori TTY Porin laitos OPTIMI 4.12.2014 Mitä optimointi on? Parhaan ratkaisun systemaattinen etsintä kaikkien mahdollisten ratkaisujen joukosta Tieteellinen
Optimoinnin sovellukset Timo Ranta Tutkijatohtori TTY Porin laitos OPTIMI 4.12.2014 Mitä optimointi on? Parhaan ratkaisun systemaattinen etsintä kaikkien mahdollisten ratkaisujen joukosta Tieteellinen
Aircraft Maintenance Scheduling with Multi- Objective Simulation- Optimization
 Aircraft Maintenance Scheduling with Multi- Objective Simulation- Optimization 7.5.2011 Ohjaaja: Ville Mattila Valvoja: Raimo Hämäläinen Tausta Ilmavoimilla tärkeä rooli maanpuolustuksessa Rauhan aikana
Aircraft Maintenance Scheduling with Multi- Objective Simulation- Optimization 7.5.2011 Ohjaaja: Ville Mattila Valvoja: Raimo Hämäläinen Tausta Ilmavoimilla tärkeä rooli maanpuolustuksessa Rauhan aikana
Luento 1: Optimointimallin muodostaminen; optimointitehtävien luokittelu
 Luento 1: Optimointimallin muodostaminen; optimointitehtävien luokittelu Merkintöjä := vasen puoli määritellään oikean puolen lausekkeella s.e. ehdolla; siten että (engl. subject to, s.t.) vasemman puolen
Luento 1: Optimointimallin muodostaminen; optimointitehtävien luokittelu Merkintöjä := vasen puoli määritellään oikean puolen lausekkeella s.e. ehdolla; siten että (engl. subject to, s.t.) vasemman puolen
Seurantalaskimen simulointi- ja suorituskykymallien vertailu (valmiin työn esittely) Joona Karjalainen
 Joona Karjalainen") Seurantalaskimen simulointi- ja suorituskykymallien vertailu (valmiin työn esittely) Joona Karjalainen 08.09.2014 Ohjaaja: DI Mikko Harju Valvoja: Prof. Kai Virtanen Työn saa tallentaa ja julkistaa Aalto-yliopiston
Seurantalaskimen simulointi- ja suorituskykymallien vertailu (valmiin työn esittely) Joona Karjalainen 08.09.2014 Ohjaaja: DI Mikko Harju Valvoja: Prof. Kai Virtanen Työn saa tallentaa ja julkistaa Aalto-yliopiston
Luento 6: Monitavoitteinen optimointi
 Luento 6: Monitavoitteinen optimointi Monitavoitteisessa optimointitehtävässä on useita optimoitavia kohdefunktioita eli ns kriteereitä: f,,f m Esimerkki ortfolion eli arvopaperijoukon optimoinnissa: f
Luento 6: Monitavoitteinen optimointi Monitavoitteisessa optimointitehtävässä on useita optimoitavia kohdefunktioita eli ns kriteereitä: f,,f m Esimerkki ortfolion eli arvopaperijoukon optimoinnissa: f
Luento 1: Optimointimallin muodostaminen; optimointitehtävien luokittelu
 Luento 1: Optimointimallin muodostaminen; optimointitehtävien luokittelu Merkintöjä := vasen puoli määritellään oikean puolen lausekkeella s.e. ehdolla; siten että (engl. subject to, s.t.) on voimassa
Luento 1: Optimointimallin muodostaminen; optimointitehtävien luokittelu Merkintöjä := vasen puoli määritellään oikean puolen lausekkeella s.e. ehdolla; siten että (engl. subject to, s.t.) on voimassa
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 2017 Insinöörivalinnan matematiikan koe , Ratkaisut (Sarja A)
") Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 017 Insinöörivalinnan matematiikan koe 30..017, Ratkaisut (Sarja A) 1. a) Lukujen 9, 0, 3 ja x keskiarvo on. Määritä x. (1 p.) b) Mitkä reaaliluvut
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 017 Insinöörivalinnan matematiikan koe 30..017, Ratkaisut (Sarja A) 1. a) Lukujen 9, 0, 3 ja x keskiarvo on. Määritä x. (1 p.) b) Mitkä reaaliluvut
Luku 7. Verkkoalgoritmit. 7.1 Määritelmiä
 Luku 7 Verkkoalgoritmit Verkot soveltuvat monenlaisten ohjelmointiongelmien mallintamiseen. Tyypillinen esimerkki verkosta on tieverkosto, jonka rakenne muistuttaa luonnostaan verkkoa. Joskus taas verkko
Luku 7 Verkkoalgoritmit Verkot soveltuvat monenlaisten ohjelmointiongelmien mallintamiseen. Tyypillinen esimerkki verkosta on tieverkosto, jonka rakenne muistuttaa luonnostaan verkkoa. Joskus taas verkko
Algoritmit 1. Luento 8 Ke Timo Männikkö
 Algoritmit 1 Luento 8 Ke 1.2.2017 Timo Männikkö Luento 8 Järjestetty binääripuu Solmujen läpikäynti Binääripuun korkeus Binääripuun tasapainottaminen Graafit ja verkot Verkon lyhimmät polut Fordin ja Fulkersonin
Algoritmit 1 Luento 8 Ke 1.2.2017 Timo Männikkö Luento 8 Järjestetty binääripuu Solmujen läpikäynti Binääripuun korkeus Binääripuun tasapainottaminen Graafit ja verkot Verkon lyhimmät polut Fordin ja Fulkersonin
Suojarakenteiden vaikutus maalin selviytymiseen epäsuoran tulen tai täsmäaseen iskussa
 Suojarakenteiden vaikutus maalin selviytymiseen epäsuoran tulen tai täsmäaseen iskussa Patrik Lahti 31.08.2018 Ohjaaja: DI Heikki Puustinen Valvoja: Prof. Kai Virtanen Työn saa tallentaa ja julkistaa Aalto-yliopiston
Suojarakenteiden vaikutus maalin selviytymiseen epäsuoran tulen tai täsmäaseen iskussa Patrik Lahti 31.08.2018 Ohjaaja: DI Heikki Puustinen Valvoja: Prof. Kai Virtanen Työn saa tallentaa ja julkistaa Aalto-yliopiston
Rajoitetun kantaman ja pitkän kantaman luotien kehitys ja stabiliteettitarkastelut (RaKa-Stab vaihe 2, 44000 )
") Rajoitetun kantaman ja pitkän kantaman luotien kehitys ja stabiliteettitarkastelut ( vaihe 2, 44000 ) Arttu Laaksonen Timo Sailaranta Aalto-yliopisto Insinööritieteiden korkeakoulu Raka-Stab Sisällysluettelo
Rajoitetun kantaman ja pitkän kantaman luotien kehitys ja stabiliteettitarkastelut ( vaihe 2, 44000 ) Arttu Laaksonen Timo Sailaranta Aalto-yliopisto Insinööritieteiden korkeakoulu Raka-Stab Sisällysluettelo
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta. Yliassistentti Jussi Hakanen syksy 2010
 TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Evoluutiopohjainen monitavoiteoptimointi MCDM ja EMO Monitavoiteoptimointi kuuluu
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Evoluutiopohjainen monitavoiteoptimointi MCDM ja EMO Monitavoiteoptimointi kuuluu
monitavoitteisissa päätöspuissa (Valmiin työn esittely) Mio Parmi Ohjaaja: Prof. Kai Virtanen Valvoja: Prof.
 Mio Parmi Ohjaaja: Prof. Kai Virtanen Valvoja: Prof.") Epätäydellisen preferenssiinformaation hyödyntäminen monitavoitteisissa päätöspuissa (Valmiin työn esittely) Mio Parmi 15.1.2018 Ohjaaja: Prof. Kai Virtanen Valvoja: Prof. Kai Virtanen Tausta Päätöspuu
Epätäydellisen preferenssiinformaation hyödyntäminen monitavoitteisissa päätöspuissa (Valmiin työn esittely) Mio Parmi 15.1.2018 Ohjaaja: Prof. Kai Virtanen Valvoja: Prof. Kai Virtanen Tausta Päätöspuu
Vastakkainasettelullinen riskianalyysi asejärjestelmien vaikuttavuusarvioinnissa
 1 Vastakkainasettelullinen riskianalyysi asejärjestelmien vaikuttavuusarvioinnissa Toteuttaja: Aalto-yliopisto Johtaja: Ahti Salo Hankkeelle myönnetty MATINE-rahoitus: 69 204 2 Tutkimusryhmä Aalto-yliopisto
1 Vastakkainasettelullinen riskianalyysi asejärjestelmien vaikuttavuusarvioinnissa Toteuttaja: Aalto-yliopisto Johtaja: Ahti Salo Hankkeelle myönnetty MATINE-rahoitus: 69 204 2 Tutkimusryhmä Aalto-yliopisto
Matemaattinen optimointi I -kurssin johdantoluento Prof. Marko M. Mäkelä Turun yliopisto Matematiikan ja tilastotieteen laitos
 Matemaattinen optimointi I -kurssin johdantoluento 10.1.2017 Prof. Marko M. Mäkelä Turun yliopisto Matematiikan ja tilastotieteen laitos Optimointi: Parhaan mahdollisen ratkaisun etsimistä sallituissa
Matemaattinen optimointi I -kurssin johdantoluento 10.1.2017 Prof. Marko M. Mäkelä Turun yliopisto Matematiikan ja tilastotieteen laitos Optimointi: Parhaan mahdollisen ratkaisun etsimistä sallituissa
Monitavoitteiseen optimointiin soveltuvan evoluutioalgoritmin tarkastelu
 Monitavoitteiseen optimointiin soveltuvan evoluutioalgoritmin tarkastelu (Valmiin työn esittely) 11.4.2011 Ohjaaja: Ville Mattila Valvoja: Raimo Hämäläinen Työn tavoite Tutkia evoluutioalgoritmia (Lee
Monitavoitteiseen optimointiin soveltuvan evoluutioalgoritmin tarkastelu (Valmiin työn esittely) 11.4.2011 Ohjaaja: Ville Mattila Valvoja: Raimo Hämäläinen Työn tavoite Tutkia evoluutioalgoritmia (Lee
Epäsymmetriset venäläiset asejärjestelmät
 Epäsymmetriset venäläiset asejärjestelmät Juha Honkonen, STEKNL, MPKK 25.5.2018 1 Luennon aiheet Putinin esittelemät asejärjestelmät o Sarmat o Burevestnik o Poseidon o Kinžal o Avangard o Peresvet Yhteiset
Epäsymmetriset venäläiset asejärjestelmät Juha Honkonen, STEKNL, MPKK 25.5.2018 1 Luennon aiheet Putinin esittelemät asejärjestelmät o Sarmat o Burevestnik o Poseidon o Kinžal o Avangard o Peresvet Yhteiset
Duaalisuus kokonaislukuoptimoinnissa. Mat , Sovelletun matematiikan tutkijaseminaari, kevät 2008, Janne Karimäki
 Duaalisuus kokonaislukuoptimoinnissa Mat-2.4191, Sovelletun matematiikan tutkijaseminaari, kevät 2008, Janne Karimäki Sisältö Duaalisuus binäärisissä optimointitehtävissä Lagrangen duaalisuus Lagrangen
Duaalisuus kokonaislukuoptimoinnissa Mat-2.4191, Sovelletun matematiikan tutkijaseminaari, kevät 2008, Janne Karimäki Sisältö Duaalisuus binäärisissä optimointitehtävissä Lagrangen duaalisuus Lagrangen
58131 Tietorakenteet ja algoritmit Uusinta- ja erilliskoe ratkaisuja (Jyrki Kivinen)
") 58131 Tietorakenteet ja algoritmit Uusinta- ja erilliskoe 12.9.2018 ratkaisuja (Jyrki Kivinen) 1. [10 pistettä] Iso-O-merkintä. (a) Pitääkö paikkansa, että n 3 + 5 = O(n 3 )? Ratkaisu: Pitää paikkansa.
58131 Tietorakenteet ja algoritmit Uusinta- ja erilliskoe 12.9.2018 ratkaisuja (Jyrki Kivinen) 1. [10 pistettä] Iso-O-merkintä. (a) Pitääkö paikkansa, että n 3 + 5 = O(n 3 )? Ratkaisu: Pitää paikkansa.
811312A Tietorakenteet ja algoritmit Kertausta jälkiosasta
 811312A Tietorakenteet ja algoritmit 2018-2019 Kertausta jälkiosasta V Hashtaulukot ja binääriset etsintäpuut Hashtaulukot Perusajatus tunnettava Tiedettävä mikä on tiivistefunktio Törmäysongelman hallinta:
811312A Tietorakenteet ja algoritmit 2018-2019 Kertausta jälkiosasta V Hashtaulukot ja binääriset etsintäpuut Hashtaulukot Perusajatus tunnettava Tiedettävä mikä on tiivistefunktio Törmäysongelman hallinta:
A ja B pelaavat sarjan pelejä. Sarjan voittaja on se, joka ensin voittaa n peliä.
 Esimerkki otteluvoiton todennäköisyys A ja B pelaavat sarjan pelejä. Sarjan voittaja on se, joka ensin voittaa n peliä. Yksittäisessä pelissä A voittaa todennäköisyydellä p ja B todennäköisyydellä q =
Esimerkki otteluvoiton todennäköisyys A ja B pelaavat sarjan pelejä. Sarjan voittaja on se, joka ensin voittaa n peliä. Yksittäisessä pelissä A voittaa todennäköisyydellä p ja B todennäköisyydellä q =
Malliratkaisut Demot
 Malliratkaisut Demot 1 12.3.2018 Tehtävä 1 Piirretään tilanteesta verkko, jossa kaupungeille on annetttu seuraavat numerot: 1 297 4 2 4 163 3 454 6 179 2 136 2 169 2 390 4 3 436 7 5 Kuva 1: Tehtävän 1
Malliratkaisut Demot 1 12.3.2018 Tehtävä 1 Piirretään tilanteesta verkko, jossa kaupungeille on annetttu seuraavat numerot: 1 297 4 2 4 163 3 454 6 179 2 136 2 169 2 390 4 3 436 7 5 Kuva 1: Tehtävän 1
Lineaaristen monitavoiteoptimointitehtävien ratkaiseminen Bensonin algoritmilla
 Lineaaristen monitavoiteoptimointitehtävien ratkaiseminen Bensonin algoritmilla Juho Andelmin 21.01.2013 Ohjaaja: TkT Juuso Liesiö Valvoja: Prof. Raimo P. Hämäläinen Työn saa tallentaa ja julkistaa Aalto-yliopiston
Lineaaristen monitavoiteoptimointitehtävien ratkaiseminen Bensonin algoritmilla Juho Andelmin 21.01.2013 Ohjaaja: TkT Juuso Liesiö Valvoja: Prof. Raimo P. Hämäläinen Työn saa tallentaa ja julkistaa Aalto-yliopiston
Simulation model to compare opportunistic maintenance policies
 Simulation model to compare opportunistic maintenance policies Noora Torpo 31.08.18 Ohjaaja/Valvoja: Antti Punkka Työn saa tallentaa ja julkistaa Aalto-yliopiston avoimilla verkkosivuilla. Muilta osin
Simulation model to compare opportunistic maintenance policies Noora Torpo 31.08.18 Ohjaaja/Valvoja: Antti Punkka Työn saa tallentaa ja julkistaa Aalto-yliopiston avoimilla verkkosivuilla. Muilta osin
Aseiden leviämisen estäminen
 Mat-2.142 Optimointiopin seminaari 6.10.1999 Antti Pirinen Aseiden leviämisen estäminen Menetelmä sotilaallisten järjestelmien tehokkuuden arvioimiseksi Referaatti Lähde: Stafira, Parnell, Moore : A Methodology
Mat-2.142 Optimointiopin seminaari 6.10.1999 Antti Pirinen Aseiden leviämisen estäminen Menetelmä sotilaallisten järjestelmien tehokkuuden arvioimiseksi Referaatti Lähde: Stafira, Parnell, Moore : A Methodology
1. (a) Seuraava algoritmi tutkii, onko jokin luku taulukossa monta kertaa:
 Seuraava algoritmi tutkii, onko jokin luku taulukossa monta kertaa:") Tietorakenteet, laskuharjoitus 10, ratkaisuja 1. (a) Seuraava algoritmi tutkii, onko jokin luku taulukossa monta kertaa: SamaLuku(T ) 2 for i = 1 to T.length 1 3 if T [i] == T [i + 1] 4 return True 5 return
Tietorakenteet, laskuharjoitus 10, ratkaisuja 1. (a) Seuraava algoritmi tutkii, onko jokin luku taulukossa monta kertaa: SamaLuku(T ) 2 for i = 1 to T.length 1 3 if T [i] == T [i + 1] 4 return True 5 return
Lentotiedustelutietoon perustuva tykistön tulenkäytön optimointi (valmiin työn esittely)
") Lentotiedustelutietoon perustuva tykistön tulenkäytön optimointi (valmiin työn esittely) Tuukka Stewen 1.9.2017 Ohjaaja: DI Juho Roponen Valvoja: prof. Ahti Salo Työn saa tallentaa ja julkistaa Aalto-yliopiston
Lentotiedustelutietoon perustuva tykistön tulenkäytön optimointi (valmiin työn esittely) Tuukka Stewen 1.9.2017 Ohjaaja: DI Juho Roponen Valvoja: prof. Ahti Salo Työn saa tallentaa ja julkistaa Aalto-yliopiston
Malliratkaisut Demot
 Malliratkaisut Demot 1 23.1.2017 1. Päätösmuuttujiksi voidaan valita x 1 : tehtyjen peruspöytin lukumäärä x 2 : tehtyjen luxuspöytien lukumäärä. Optimointitehtäväksi tulee max 200x 1 + 350x 2 s. t. 5x
Malliratkaisut Demot 1 23.1.2017 1. Päätösmuuttujiksi voidaan valita x 1 : tehtyjen peruspöytin lukumäärä x 2 : tehtyjen luxuspöytien lukumäärä. Optimointitehtäväksi tulee max 200x 1 + 350x 2 s. t. 5x
Kustannustehokkaat riskienhallintatoimenpiteet kuljetusverkostossa (Valmiin työn esittely)
") Kustannustehokkaat riskienhallintatoimenpiteet kuljetusverkostossa (Valmiin työn esittely) Joonas Lanne 23.2.2015 Ohjaaja: Eeva Vilkkumaa Valvoja: Ahti Salo Työn saa tallentaa ja julkistaa Aalto-yliopiston
Kustannustehokkaat riskienhallintatoimenpiteet kuljetusverkostossa (Valmiin työn esittely) Joonas Lanne 23.2.2015 Ohjaaja: Eeva Vilkkumaa Valvoja: Ahti Salo Työn saa tallentaa ja julkistaa Aalto-yliopiston
Harjoitus 3 (31.3.2015)
") Harjoitus (..05) Tehtävä Olkoon kaaren paino c ij suurin sallittu korkeus tieosuudella (i,j). Etsitään reitti solmusta s solmuun t siten, että reitin suurin sallittu korkeus pienimmillään olisi mahdollisimman
Harjoitus (..05) Tehtävä Olkoon kaaren paino c ij suurin sallittu korkeus tieosuudella (i,j). Etsitään reitti solmusta s solmuun t siten, että reitin suurin sallittu korkeus pienimmillään olisi mahdollisimman
Monitavoiteoptimointi
 Monitavoiteoptimointi Useita erilaisia tavoitteita, eli useita objektifunktioita Tavoitteet yleensä ristiriitaisia ja yhteismitattomia Optimaalisuus tarkoittaa yleensä eri asiaa kuin yksitavoitteisessa
Monitavoiteoptimointi Useita erilaisia tavoitteita, eli useita objektifunktioita Tavoitteet yleensä ristiriitaisia ja yhteismitattomia Optimaalisuus tarkoittaa yleensä eri asiaa kuin yksitavoitteisessa
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta. Yliassistentti Jussi Hakanen syksy 2010
 TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Yleistä https://korppi.jyu.fi/kotka/r.jsp?course=96762 Sisältö Johdanto yksitavoitteiseen
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Yleistä https://korppi.jyu.fi/kotka/r.jsp?course=96762 Sisältö Johdanto yksitavoitteiseen
Kandidaatintyön esittely: Epätäydellisen preferenssi-informaation huomioon ottavien päätöksenteon tukimenetelmien vertailu
 Kandidaatintyön esittely: Epätäydellisen preferenssi-informaation huomioon ottavien päätöksenteon tukimenetelmien vertailu Vilma Virasjoki 19.11.2012 Ohjaaja: DI Jouni Pousi Valvoja: Professori Raimo P.
Kandidaatintyön esittely: Epätäydellisen preferenssi-informaation huomioon ottavien päätöksenteon tukimenetelmien vertailu Vilma Virasjoki 19.11.2012 Ohjaaja: DI Jouni Pousi Valvoja: Professori Raimo P.
REITTI- JA SIJAINTIALLOKAATIO-ONGELMIEN RATKAISEMINEN GEOINFORMATIIKAN MENETELMIN: ESIMERKKEINÄ MAASTOINVENTOINTIREITIT JA SAIRAALAPALVELUT
 REITTI- JA SIJAINTIALLOKAATIO-ONGELMIEN RATKAISEMINEN GEOINFORMATIIKAN MENETELMIN: ESIMERKKEINÄ MAASTOINVENTOINTIREITIT JA SAIRAALAPALVELUT Harri Antikainen Oulun yliopisto Maantieteen laitos GEOINFORMATIIKAN
REITTI- JA SIJAINTIALLOKAATIO-ONGELMIEN RATKAISEMINEN GEOINFORMATIIKAN MENETELMIN: ESIMERKKEINÄ MAASTOINVENTOINTIREITIT JA SAIRAALAPALVELUT Harri Antikainen Oulun yliopisto Maantieteen laitos GEOINFORMATIIKAN
Johdatus verkkoteoriaan 4. luento
 Johdatus verkkoteoriaan 4. luento 28.11.17 Viikolla 46 läpikäydyt käsitteet Viikolla 47 läpikäydyt käsitteet Verkko eli graafi, tasoverkko, solmut, välit, alueet, suunnatut verkot, isomorfiset verkot,
Johdatus verkkoteoriaan 4. luento 28.11.17 Viikolla 46 läpikäydyt käsitteet Viikolla 47 läpikäydyt käsitteet Verkko eli graafi, tasoverkko, solmut, välit, alueet, suunnatut verkot, isomorfiset verkot,
Harjoitus 3 (3.4.2014)
") Harjoitus 3 (3..) Tehtävä Olkoon kaaren paino c ij suurin sallittu korkeus tieosuudella (i, j). Etsitään reitti solmusta s solmuun t siten, että reitin suurin sallittu korkeus pienimmillään olisi mahdollisimman
Harjoitus 3 (3..) Tehtävä Olkoon kaaren paino c ij suurin sallittu korkeus tieosuudella (i, j). Etsitään reitti solmusta s solmuun t siten, että reitin suurin sallittu korkeus pienimmillään olisi mahdollisimman
Johdatus tekoälyn taustalla olevaan matematiikkaan
 Johdatus tekoälyn taustalla olevaan matematiikkaan Informaatioteknologian tiedekunta Jyväskylän yliopisto 3. luento 17.11.2017 Neuroverkon opettaminen (ohjattu oppiminen) Neuroverkkoa opetetaan syöte-tavoite-pareilla
Johdatus tekoälyn taustalla olevaan matematiikkaan Informaatioteknologian tiedekunta Jyväskylän yliopisto 3. luento 17.11.2017 Neuroverkon opettaminen (ohjattu oppiminen) Neuroverkkoa opetetaan syöte-tavoite-pareilla
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat.
 Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat.") MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016 Antti Rasila
MS-A0204 Differentiaali- ja integraalilaskenta 2 (ELEC2) Luento 6: Ääriarvojen luokittelu. Lagrangen kertojat. Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Kevät 2016 Antti Rasila
811312A Tietorakenteet ja algoritmit Kertausta jälkiosasta
 811312A Tietorakenteet ja algoritmit 2016-2017 Kertausta jälkiosasta IV Perustietorakenteet Pino, jono ja listat tunnettava Osattava soveltaa rakenteita algoritmeissa Osattava päätellä operaatioiden aikakompleksisuus
811312A Tietorakenteet ja algoritmit 2016-2017 Kertausta jälkiosasta IV Perustietorakenteet Pino, jono ja listat tunnettava Osattava soveltaa rakenteita algoritmeissa Osattava päätellä operaatioiden aikakompleksisuus
Lentolaitteen tutkapoikkipinta-alasta riippuva lentoreitin uhkamalli
 Aalto-yliopisto Perustieteiden korkeakoulu Teknillisen fysiikan ja matematiikan tutkinto-ohjelma Lentolaitteen tutkapoikkipinta-alasta riippuva lentoreitin uhkamalli kandidaatintyö 18.4.2016 Markus Sallila
Aalto-yliopisto Perustieteiden korkeakoulu Teknillisen fysiikan ja matematiikan tutkinto-ohjelma Lentolaitteen tutkapoikkipinta-alasta riippuva lentoreitin uhkamalli kandidaatintyö 18.4.2016 Markus Sallila
13 Lyhimmät painotetut polut
 TIE-20100 Tietorakenteet ja algoritmit 297 13 Lyhimmät painotetut polut BFS löytää lyhimmän polun lähtösolmusta graafin saavutettaviin solmuihin. Se ei kuitenkaan enää suoriudu tehtävästä, jos kaarien
TIE-20100 Tietorakenteet ja algoritmit 297 13 Lyhimmät painotetut polut BFS löytää lyhimmän polun lähtösolmusta graafin saavutettaviin solmuihin. Se ei kuitenkaan enää suoriudu tehtävästä, jos kaarien
Algoritmit 1. Luento 13 Ma Timo Männikkö
 Algoritmit 1 Luento 13 Ma 26.2.2018 Timo Männikkö Luento 13 Suunnittelumenetelmät Taulukointi Kapsäkkiongelma Ahne menetelmä Verkon lyhimmät polut Dijkstran menetelmä Verkon lyhin virittävä puu Kruskalin
Algoritmit 1 Luento 13 Ma 26.2.2018 Timo Männikkö Luento 13 Suunnittelumenetelmät Taulukointi Kapsäkkiongelma Ahne menetelmä Verkon lyhimmät polut Dijkstran menetelmä Verkon lyhin virittävä puu Kruskalin
14. Luennon sisältö. Kuljetustehtävä. Verkkoteoria ja optimointi. esimerkki. verkkoteorian optimointitehtäviä verkon virittävä puu lyhimmät polut
 JYVÄSKYLÄN YLIOPISTO 14. Luennon sisältö Kuljetustehtävä esimerkki Verkkoteoria ja optimointi verkkoteorian optimointitehtäviä verkon virittävä puu lyhimmät polut kevät 2012 TIEA382 Lineaarinen ja diskreetti
JYVÄSKYLÄN YLIOPISTO 14. Luennon sisältö Kuljetustehtävä esimerkki Verkkoteoria ja optimointi verkkoteorian optimointitehtäviä verkon virittävä puu lyhimmät polut kevät 2012 TIEA382 Lineaarinen ja diskreetti
Luodin massajakauman optimointi
 Luodin massajakauman optimointi Janne Lahti 01.09.2017 Ohjaaja: DI Mikko Harju Valvoja: Prof. Kai Virtanen Työn saa tallentaa ja julkistaa Aalto-yliopiston avoimilla verkkosivuilla. Muilta osin kaikki
Luodin massajakauman optimointi Janne Lahti 01.09.2017 Ohjaaja: DI Mikko Harju Valvoja: Prof. Kai Virtanen Työn saa tallentaa ja julkistaa Aalto-yliopiston avoimilla verkkosivuilla. Muilta osin kaikki
Harjoitus 1 (17.3.2015)
") Harjoitus 1 (17.3.2015) Tehtävä 1 Piirretään tilanteesta verkko, jossa kaupungeille on annetttu seuraavat numerot: 1 = Turku 2 = Tampere 3 = Helsinki 4 = Kuopio 5 = Joensuu. a) Tehtävänä on ratkaista Bellman
Harjoitus 1 (17.3.2015) Tehtävä 1 Piirretään tilanteesta verkko, jossa kaupungeille on annetttu seuraavat numerot: 1 = Turku 2 = Tampere 3 = Helsinki 4 = Kuopio 5 = Joensuu. a) Tehtävänä on ratkaista Bellman
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta. Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010
 TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Monitavoiteoptimointi Mitä monitavoitteisuus tarkoittaa? Halutaan saavuttaa
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Monitavoiteoptimointi Mitä monitavoitteisuus tarkoittaa? Halutaan saavuttaa
Algoritmit 1. Luento 13 Ti 23.2.2016. Timo Männikkö
 Algoritmit 1 Luento 13 Ti 23.2.2016 Timo Männikkö Luento 13 Suunnittelumenetelmät Taulukointi Kapsäkkiongelma Ahne menetelmä Verkon lyhimmät polut Dijkstran menetelmä Verkon lyhin virittävä puu Kruskalin
Algoritmit 1 Luento 13 Ti 23.2.2016 Timo Männikkö Luento 13 Suunnittelumenetelmät Taulukointi Kapsäkkiongelma Ahne menetelmä Verkon lyhimmät polut Dijkstran menetelmä Verkon lyhin virittävä puu Kruskalin
Kaupunkimallit ja Mallintava kaavoitus. Vianova Systems Finland Oy Jarkko Sireeni 9.2.2011
 Kaupunkimallit ja Mallintava kaavoitus Vianova Systems Finland Oy Jarkko Sireeni 9.2.2011 Kaupunkimalli? Mallintamisen eri skaalat Kaavoitus ja aluerakentaminen Infra ja kunnallistekniikka Talonrakennus
Kaupunkimallit ja Mallintava kaavoitus Vianova Systems Finland Oy Jarkko Sireeni 9.2.2011 Kaupunkimalli? Mallintamisen eri skaalat Kaavoitus ja aluerakentaminen Infra ja kunnallistekniikka Talonrakennus
Suomen rautatieverkoston robustisuus
 Suomen rautatieverkoston robustisuus Samu Kilpinen 28.09.2016 Ohjaaja: Eeva Vilkkumaa Valvoja: Ahti Salo Rautatieverkosto Rautatie on erinomainen tapa kuljettaa suuria ihmis- ja hyödykemääriä Käyttöä etenkin
Suomen rautatieverkoston robustisuus Samu Kilpinen 28.09.2016 Ohjaaja: Eeva Vilkkumaa Valvoja: Ahti Salo Rautatieverkosto Rautatie on erinomainen tapa kuljettaa suuria ihmis- ja hyödykemääriä Käyttöä etenkin
j n j a b a c a d b c c d m j b a c a d a c b d c c j
 TEKNILLINEN KORKEAKOULU Tietoliikenne- ja tietoverkkotekniikan laitos S-38.115 Liikenneteorian perusteet, Kevät 2008 Demonstraatiot Luento 12 29.2.2008 D12/1 Tarkastellaan verkkoa, jossa on solmua ja linkkiä.
TEKNILLINEN KORKEAKOULU Tietoliikenne- ja tietoverkkotekniikan laitos S-38.115 Liikenneteorian perusteet, Kevät 2008 Demonstraatiot Luento 12 29.2.2008 D12/1 Tarkastellaan verkkoa, jossa on solmua ja linkkiä.
Algoritmit 2. Luento 2 Ke Timo Männikkö
 Algoritmit 2 Luento 2 Ke 15.3.2017 Timo Männikkö Luento 2 Tietorakenteet Lineaarinen lista, binääripuu Prioriteettijono Kekorakenne Keko-operaatiot Keon toteutus taulukolla Algoritmit 2 Kevät 2017 Luento
Algoritmit 2 Luento 2 Ke 15.3.2017 Timo Männikkö Luento 2 Tietorakenteet Lineaarinen lista, binääripuu Prioriteettijono Kekorakenne Keko-operaatiot Keon toteutus taulukolla Algoritmit 2 Kevät 2017 Luento
Mat Työ 1: Optimaalinen lento riippuliitimellä
 Mat-2.132 Työ 1: Optimaalinen lento riippuliitimellä Miten ohjaan liidintä, jotta lentäisin mahdollisimman pitkälle?? 1 työssä Konstruoidaan riippuliitimen malli dynaamisen systeemin tilaesitys Simuloidaan
Mat-2.132 Työ 1: Optimaalinen lento riippuliitimellä Miten ohjaan liidintä, jotta lentäisin mahdollisimman pitkälle?? 1 työssä Konstruoidaan riippuliitimen malli dynaamisen systeemin tilaesitys Simuloidaan
ENSIHOITOMALLINNUS. Malli laskee asemapaikkojen määrän ja sijainnin, ambulanssien määrän, palvelun peittoprosentin ja kustannukset
 ENSIHOITOMALLINNUS Malli laskee asemapaikkojen määrän ja sijainnin, ambulanssien määrän, palvelun peittoprosentin ja kustannukset ENSIHOITO: taustaa Ensihoito on sairastuneen tai vammautuneen potilaan
ENSIHOITOMALLINNUS Malli laskee asemapaikkojen määrän ja sijainnin, ambulanssien määrän, palvelun peittoprosentin ja kustannukset ENSIHOITO: taustaa Ensihoito on sairastuneen tai vammautuneen potilaan
Pyöräilyn matka-aikojen ja reittivalintojen paikkatietopohjainen mallinnus pääkaupunkiseudulla
 Pyöräilyn matka-aikojen ja reittivalintojen paikkatietopohjainen mallinnus pääkaupunkiseudulla Pro gradu -tutkielma Ainokaisa Tarnanen Helsingin yliopisto 3.6.2016 Taustaa Pyöräily ja saavutettavuus ovat
Pyöräilyn matka-aikojen ja reittivalintojen paikkatietopohjainen mallinnus pääkaupunkiseudulla Pro gradu -tutkielma Ainokaisa Tarnanen Helsingin yliopisto 3.6.2016 Taustaa Pyöräily ja saavutettavuus ovat
OPERAATIOANALYYSI ORMS.1020
 VAASAN YLIOPISTO Talousmatematiikka Prof. Ilkka Virtanen OPERAATIOANALYYSI ORMS.1020 Tentti 2.2.2008 1. Yrityksen tavoitteena on minimoida tuotannosta ja varastoinnista aiheutuvat kustannukset 4 viikon
VAASAN YLIOPISTO Talousmatematiikka Prof. Ilkka Virtanen OPERAATIOANALYYSI ORMS.1020 Tentti 2.2.2008 1. Yrityksen tavoitteena on minimoida tuotannosta ja varastoinnista aiheutuvat kustannukset 4 viikon
TTY Porin laitoksen optimointipalvelut yrityksille
 TTY Porin laitoksen optimointipalvelut yrityksille Timo Ranta, TkT Frank Cameron, TkT timo.ranta@tut.fi frank.cameron@tut.fi Automaation aamukahvit 28.8.2013 Optimointi Tarkoittaa parhaan ratkaisun valintaa
TTY Porin laitoksen optimointipalvelut yrityksille Timo Ranta, TkT Frank Cameron, TkT timo.ranta@tut.fi frank.cameron@tut.fi Automaation aamukahvit 28.8.2013 Optimointi Tarkoittaa parhaan ratkaisun valintaa
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 2: Usean muuttujan funktiot
 Luento 2: Usean muuttujan funktiot") MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 2: Usean muuttujan funktiot Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 2016 Antti Rasila (Aalto-yliopisto)
MS-A0202 Differentiaali- ja integraalilaskenta 2 (SCI) Luento 2: Usean muuttujan funktiot Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 2016 Antti Rasila (Aalto-yliopisto)
Graafit ja verkot. Joukko solmuja ja joukko järjestämättömiä solmupareja. eli haaroja. Joukko solmuja ja joukko järjestettyjä solmupareja eli kaaria
 Graafit ja verkot Suuntamaton graafi: eli haaroja Joukko solmuja ja joukko järjestämättömiä solmupareja Suunnattu graafi: Joukko solmuja ja joukko järjestettyjä solmupareja eli kaaria Haaran päätesolmut:
Graafit ja verkot Suuntamaton graafi: eli haaroja Joukko solmuja ja joukko järjestämättömiä solmupareja Suunnattu graafi: Joukko solmuja ja joukko järjestettyjä solmupareja eli kaaria Haaran päätesolmut:
58131 Tietorakenteet ja algoritmit (kevät 2013) Kurssikoe 2, , vastauksia
 Kurssikoe 2, , vastauksia") 58131 Tietorakenteet ja algoritmit (kevät 2013) Kurssikoe 2, 652013, vastauksia 1 [6 pistettä] Vastaa jokaisesta alla olevasta väittämästä onko se tosi vai epätosi ja anna lyhyt perustelu Jokaisesta kohdasta
58131 Tietorakenteet ja algoritmit (kevät 2013) Kurssikoe 2, 652013, vastauksia 1 [6 pistettä] Vastaa jokaisesta alla olevasta väittämästä onko se tosi vai epätosi ja anna lyhyt perustelu Jokaisesta kohdasta
Operatioanalyysi 2011, Harjoitus 3, viikko 39
 Operatioanalyysi 2011, Harjoitus 3, viikko 39 H3t1, Exercise 3.1. H3t2, Exercise 3.2. H3t3, Exercise 3.3. H3t4, Exercise 3.4. H3t5 (Exercise 3.1.) 1 3.1. Find the (a) standard form, (b) slack form of the
Operatioanalyysi 2011, Harjoitus 3, viikko 39 H3t1, Exercise 3.1. H3t2, Exercise 3.2. H3t3, Exercise 3.3. H3t4, Exercise 3.4. H3t5 (Exercise 3.1.) 1 3.1. Find the (a) standard form, (b) slack form of the
Bayesin pelit. Kalle Siukola. MS-E2142 Optimointiopin seminaari: Peliteoria ja tekoäly
 Bayesin pelit Kalle Siukola MS-E2142 Optimointiopin seminaari: Peliteoria ja tekoäly 12.10.2016 Toistetun pelin esittäminen automaatin avulla Ekstensiivisen muodon puu on tehoton esitystapa, jos peliä
Bayesin pelit Kalle Siukola MS-E2142 Optimointiopin seminaari: Peliteoria ja tekoäly 12.10.2016 Toistetun pelin esittäminen automaatin avulla Ekstensiivisen muodon puu on tehoton esitystapa, jos peliä
Algoritmit 2. Luento 2 To Timo Männikkö
 Algoritmit 2 Luento 2 To 14.3.2019 Timo Männikkö Luento 2 Tietorakenteet Lineaarinen lista, binääripuu Prioriteettijono Kekorakenne Keko-operaatiot Keon toteutus taulukolla Algoritmit 2 Kevät 2019 Luento
Algoritmit 2 Luento 2 To 14.3.2019 Timo Männikkö Luento 2 Tietorakenteet Lineaarinen lista, binääripuu Prioriteettijono Kekorakenne Keko-operaatiot Keon toteutus taulukolla Algoritmit 2 Kevät 2019 Luento
Liikkeet. Haarto & Karhunen. www.turkuamk.fi
 Liikkeet Haarto & Karhunen Suureita Aika: tunnus t, yksikkö: sekunti = s Paikka: tunnus x, y, r, ; yksikkö: metri = m Paikka on ektorisuure Suoraiiaisessa liikkeessä kappaleen paikka (asema) oidaan ilmoittaa
Liikkeet Haarto & Karhunen Suureita Aika: tunnus t, yksikkö: sekunti = s Paikka: tunnus x, y, r, ; yksikkö: metri = m Paikka on ektorisuure Suoraiiaisessa liikkeessä kappaleen paikka (asema) oidaan ilmoittaa
Lentolaskuri kohti vastuullisempaa lentomatkailua. Tietoa laskurin toiminnasta 5.6.2008 (päivitys 9.7.2009)
") Lentolaskuri kohti vastuullisempaa lentomatkailua Tietoa laskurin toiminnasta 5.6.2008 (päivitys 9.7.2009) Mistä lentolaskurissa on kyse? Lentolaskuri on tamperelainen internetlaskuri, jonka avulla kukin
Lentolaskuri kohti vastuullisempaa lentomatkailua Tietoa laskurin toiminnasta 5.6.2008 (päivitys 9.7.2009) Mistä lentolaskurissa on kyse? Lentolaskuri on tamperelainen internetlaskuri, jonka avulla kukin
Logistiikkajärjestelmien mallintaminen - käytännön sovelluksia
 FORS-seminaari 2005 - Infrastruktuuri ja logistiikka Logistiikkajärjestelmien mallintaminen - käytännön sovelluksia Ville Hyvönen EP-Logistics Oy Taustaa Ville Hyvönen DI (TKK, teollisuustalous, tuotannon
FORS-seminaari 2005 - Infrastruktuuri ja logistiikka Logistiikkajärjestelmien mallintaminen - käytännön sovelluksia Ville Hyvönen EP-Logistics Oy Taustaa Ville Hyvönen DI (TKK, teollisuustalous, tuotannon
TIES483 Epälineaarinen optimointi
 TIES483 Epälineaarinen optimointi Käytännön optimointiongelmien ratkaiseminen jussi.hakanen@jyu.fi Syksy 2012 Käytännön optimointiongelmien ratkaiseminen Käytännössä tulee kiinnittää huomiota ainakin seuraaviin
TIES483 Epälineaarinen optimointi Käytännön optimointiongelmien ratkaiseminen jussi.hakanen@jyu.fi Syksy 2012 Käytännön optimointiongelmien ratkaiseminen Käytännössä tulee kiinnittää huomiota ainakin seuraaviin
Juuri 3 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty
 Kertaus K1. a) Ratkaistaan suorakulmaisen kolmion kateetin pituus x tangentin avulla. tan9 x,5,5 x,5 tan 9 x 2,8... x» 2,8 (cm) Kateetin pituus x on 2,8 cm. b) Ratkaistaan vinokulmaisen kolmion sivun pituus
Kertaus K1. a) Ratkaistaan suorakulmaisen kolmion kateetin pituus x tangentin avulla. tan9 x,5,5 x,5 tan 9 x 2,8... x» 2,8 (cm) Kateetin pituus x on 2,8 cm. b) Ratkaistaan vinokulmaisen kolmion sivun pituus
58131 Tietorakenteet ja algoritmit (kevät 2014) Uusinta- ja erilliskoe, , vastauksia
 Uusinta- ja erilliskoe, , vastauksia") 58131 Tietorakenteet ja algoritmit (kevät 2014) Uusinta- ja erilliskoe, 10..2014, vastauksia 1. [9 pistettä] (a) Todistetaan 2n 2 + n + 5 = O(n 2 ): Kun n 1 on 2n 2 + n + 5 2n 2 + n 2 +5n 2 = 8n 2. Eli
58131 Tietorakenteet ja algoritmit (kevät 2014) Uusinta- ja erilliskoe, 10..2014, vastauksia 1. [9 pistettä] (a) Todistetaan 2n 2 + n + 5 = O(n 2 ): Kun n 1 on 2n 2 + n + 5 2n 2 + n 2 +5n 2 = 8n 2. Eli
Simulointimalli lentokoneiden käytettävyyden hallintaan. Ville Mattila Systeemianalyysin laboratorio Teknillinen korkeakoulu www.sal.tkk.
 Simulointimalli lentokoneiden käytettävyyden hallintaan Ville Mattila Systeemianalyysin laboratorio Teknillinen korkeakoulu www.sal.tkk.fi Sisältö Johdanto Simulointimalli Suomen Ilmavoimien lentokoneiden
Simulointimalli lentokoneiden käytettävyyden hallintaan Ville Mattila Systeemianalyysin laboratorio Teknillinen korkeakoulu www.sal.tkk.fi Sisältö Johdanto Simulointimalli Suomen Ilmavoimien lentokoneiden
ÄÄNENVAIMENTIMIEN MALLINNUSPOHJAINEN MONITAVOITTEINEN MUODONOPTIMOINTI 1 JOHDANTO. Tuomas Airaksinen 1, Erkki Heikkola 2
 ÄÄNENVAIMENTIMIEN MALLINNUSPOHJAINEN MONITAVOITTEINEN MUODONOPTIMOINTI Tuomas Airaksinen 1, Erkki Heikkola 2 1 Jyväskylän yliopisto PL 35 (Agora), 40014 Jyväskylän yliopisto tuomas.a.airaksinen@jyu.fi
ÄÄNENVAIMENTIMIEN MALLINNUSPOHJAINEN MONITAVOITTEINEN MUODONOPTIMOINTI Tuomas Airaksinen 1, Erkki Heikkola 2 1 Jyväskylän yliopisto PL 35 (Agora), 40014 Jyväskylän yliopisto tuomas.a.airaksinen@jyu.fi
Korkean resoluution ja suuren kuva-alueen SAR
 Korkean resoluution ja suuren kuva-alueen SAR MATINE tutkimusseminaari 17.11.2016 Risto Vehmas, Juha Jylhä, Minna Väilä, Ari Visa Tampereen teknillinen yliopisto Signaalinkäsittelyn laitos Hankkeelle myönnetty
Korkean resoluution ja suuren kuva-alueen SAR MATINE tutkimusseminaari 17.11.2016 Risto Vehmas, Juha Jylhä, Minna Väilä, Ari Visa Tampereen teknillinen yliopisto Signaalinkäsittelyn laitos Hankkeelle myönnetty
MS-A0207 Differentiaali- ja integraalilaskenta 2 (CHEM) Luento 2: Usean muuttujan funktiot
 Luento 2: Usean muuttujan funktiot") MS-A0207 Differentiaali- ja integraalilaskenta 2 (CHEM) Luento 2: Usean muuttujan funktiot Harri Hakula Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät 2018 1 Perustuu Antti Rasilan luentomonisteeseen
MS-A0207 Differentiaali- ja integraalilaskenta 2 (CHEM) Luento 2: Usean muuttujan funktiot Harri Hakula Matematiikan ja systeemianalyysin laitos 1 Aalto-yliopisto Kevät 2018 1 Perustuu Antti Rasilan luentomonisteeseen
Informaation leviäminen väkijoukossa matemaattinen mallinnus
 Informaation leviäminen väkijoukossa matemaattinen mallinnus Tony Nysten 11.4.2011 Ohjaaja: DI Simo Heliövaara Valvoja: Prof. Harri Ehtamo Väkijoukon toiminta evakuointitilanteessa Uhkaavan tilanteen huomanneen
Informaation leviäminen väkijoukossa matemaattinen mallinnus Tony Nysten 11.4.2011 Ohjaaja: DI Simo Heliövaara Valvoja: Prof. Harri Ehtamo Väkijoukon toiminta evakuointitilanteessa Uhkaavan tilanteen huomanneen
LIITE ELITE Ti ohjelmistoversio 5.0
 LIITE ELITE Ti ohjelmistoversio 5.0 Tässä liitteessä on esitelty uudet ominaisuudet, jotka sisältyvät ELITE-Ti -ohjelmistoversioon 5.0 ja joita ei ole kuvattu ELITE-Ti - käyttöoppaissa. Ominaisuus Sivulla
LIITE ELITE Ti ohjelmistoversio 5.0 Tässä liitteessä on esitelty uudet ominaisuudet, jotka sisältyvät ELITE-Ti -ohjelmistoversioon 5.0 ja joita ei ole kuvattu ELITE-Ti - käyttöoppaissa. Ominaisuus Sivulla
Silmukkaoptimoinnista
 sta TIE448 Kääntäjätekniikka, syksy 2009 Antti-Juhani Kaijanaho TIETOTEKNIIKAN LAITOS 8. joulukuuta 2009 Sisällys Sisällys Seuraava deadline Vaihe F maanantai 14.12. klo 12 rekisteriallokaatio Arvostelukappale
sta TIE448 Kääntäjätekniikka, syksy 2009 Antti-Juhani Kaijanaho TIETOTEKNIIKAN LAITOS 8. joulukuuta 2009 Sisällys Sisällys Seuraava deadline Vaihe F maanantai 14.12. klo 12 rekisteriallokaatio Arvostelukappale
KJR-C1001 Statiikka ja dynamiikka
 KJR-C1001 Statiikka ja dynamiikka uento 16: Yleinen tasoliike kappaleen liikkeen mallinnus ja analysointi Jua Hartikainen Rakennustekniikan laitos Aalto-yliopiston insinööritieteiden korkeakoulu 16 Yleinen
KJR-C1001 Statiikka ja dynamiikka uento 16: Yleinen tasoliike kappaleen liikkeen mallinnus ja analysointi Jua Hartikainen Rakennustekniikan laitos Aalto-yliopiston insinööritieteiden korkeakoulu 16 Yleinen
Algoritmit 1. Luento 1 Ti Timo Männikkö
 Algoritmit 1 Luento 1 Ti 10.1.2017 Timo Männikkö Luento 1 Algoritmi Algoritmin toteutus Ongelman ratkaiseminen Algoritmin tehokkuus Algoritmin suoritusaika Algoritmin analysointi Algoritmit 1 Kevät 2017
Algoritmit 1 Luento 1 Ti 10.1.2017 Timo Männikkö Luento 1 Algoritmi Algoritmin toteutus Ongelman ratkaiseminen Algoritmin tehokkuus Algoritmin suoritusaika Algoritmin analysointi Algoritmit 1 Kevät 2017
Epätäydellisen preferenssi-informaation huomioon ottavien päätöksenteon tukimenetelmien vertailu (aihe-esittely)
") Epätäydellisen preferenssi-informaation huomioon ottavien päätöksenteon tukimenetelmien vertailu (aihe-esittely) Vilma Virasjoki 23.01.2012 Ohjaaja: Jouni Pousi Valvoja: Raimo P. Hämäläinen Työn saa tallentaa
Epätäydellisen preferenssi-informaation huomioon ottavien päätöksenteon tukimenetelmien vertailu (aihe-esittely) Vilma Virasjoki 23.01.2012 Ohjaaja: Jouni Pousi Valvoja: Raimo P. Hämäläinen Työn saa tallentaa
Algoritmit 2. Luento 7 Ti Timo Männikkö
 Algoritmit 2 Luento 7 Ti 4.4.2017 Timo Männikkö Luento 7 Joukot Joukko-operaatioita Joukkojen esitystapoja Alkiovieraat osajoukot Toteutus puurakenteena Algoritmit 2 Kevät 2017 Luento 7 Ti 4.4.2017 2/26
Algoritmit 2 Luento 7 Ti 4.4.2017 Timo Männikkö Luento 7 Joukot Joukko-operaatioita Joukkojen esitystapoja Alkiovieraat osajoukot Toteutus puurakenteena Algoritmit 2 Kevät 2017 Luento 7 Ti 4.4.2017 2/26
Lineaaristen monitavoiteoptimointitehtävien
 Lineaaristen monitavoiteoptimointitehtävien ratkaiseminen Jerri Nummenpalo 17.09.2012 Ohjaaja: TkT Juuso Liesiö Valvoja: Prof. Ahti Salo Työn saa tallentaa ja julkistaa Aalto-yliopiston avoimilla verkkosivuilla.
Lineaaristen monitavoiteoptimointitehtävien ratkaiseminen Jerri Nummenpalo 17.09.2012 Ohjaaja: TkT Juuso Liesiö Valvoja: Prof. Ahti Salo Työn saa tallentaa ja julkistaa Aalto-yliopiston avoimilla verkkosivuilla.
Mat Optimointiopin seminaari kevät Monitavoiteoptimointi. Tavoitteet
 Mat-2.142 Optimointiopin seminaari kevät 2000 Monitavoiteoptimointi Optimointiopin seminaari - Kevät 2000 / 1 Tavoitteet Monitavoitteisten optimointitehtävien ratkaisukäsitteet ja soveltamismahdollisuudet
Mat-2.142 Optimointiopin seminaari kevät 2000 Monitavoiteoptimointi Optimointiopin seminaari - Kevät 2000 / 1 Tavoitteet Monitavoitteisten optimointitehtävien ratkaisukäsitteet ja soveltamismahdollisuudet
Malliratkaisut Demot
 Malliratkaisut Demot 3 7.3.07 Tehtävä Olkoon tilamuuttujat Tällöin saadaan rekursioyhtälö f n (x n ) = max yn {0,} ynwn xn f 0 ( ) = 0. x n = vaiheessa n jäljellä oleva paino, n =,...,N, esine n pakataan
Malliratkaisut Demot 3 7.3.07 Tehtävä Olkoon tilamuuttujat Tällöin saadaan rekursioyhtälö f n (x n ) = max yn {0,} ynwn xn f 0 ( ) = 0. x n = vaiheessa n jäljellä oleva paino, n =,...,N, esine n pakataan
x + 1 πx + 2y = 6 2y = 6 x 1 2 πx y = x 1 4 πx Ikkunan pinta-ala on suorakulmion ja puoliympyrän pinta-alojen summa, eli
 BM0A5810 - Differentiaalilaskenta ja sovellukset Harjoitus, Syksy 015 1. a) Funktio f ) = 1) vaihtaa merkkinsä pisteissä = 1, = 0 ja = 1. Lisäksi se on pariton funktio joten voimme laskea vain pinta-alan
BM0A5810 - Differentiaalilaskenta ja sovellukset Harjoitus, Syksy 015 1. a) Funktio f ) = 1) vaihtaa merkkinsä pisteissä = 1, = 0 ja = 1. Lisäksi se on pariton funktio joten voimme laskea vain pinta-alan
isomeerejä yhteensä yhdeksän kappaletta.
 Tehtävä 2 : 1 Esitetään aluksi eräitä havaintoja. Jokaisella n Z + symbolilla H (n) merkitään kaikkien niiden verkkojen joukkoa, jotka vastaavat jotakin tehtävänannon ehtojen mukaista alkaanin hiiliketjua
Tehtävä 2 : 1 Esitetään aluksi eräitä havaintoja. Jokaisella n Z + symbolilla H (n) merkitään kaikkien niiden verkkojen joukkoa, jotka vastaavat jotakin tehtävänannon ehtojen mukaista alkaanin hiiliketjua
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 3: Vektorikentät
 MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 3: Vektorikentät Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 2016 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2016
MS-A0305 Differentiaali- ja integraalilaskenta 3 Luento 3: Vektorikentät Antti Rasila Matematiikan ja systeemianalyysin laitos Aalto-yliopisto Syksy 2016 Antti Rasila (Aalto-yliopisto) MS-A0305 Syksy 2016
Parempaa äänenvaimennusta simuloinnilla ja optimoinnilla
 Parempaa äänenvaimennusta simuloinnilla ja optimoinnilla Erkki Heikkola Numerola Oy, Jyväskylä Laskennallisten tieteiden päivä 29.9.2010, Itä-Suomen yliopisto, Kuopio Putkistojen äänenvaimentimien suunnittelu
Parempaa äänenvaimennusta simuloinnilla ja optimoinnilla Erkki Heikkola Numerola Oy, Jyväskylä Laskennallisten tieteiden päivä 29.9.2010, Itä-Suomen yliopisto, Kuopio Putkistojen äänenvaimentimien suunnittelu
Algoritmit 1. Luento 9 Ti Timo Männikkö
 Algoritmit 1 Luento 9 Ti 7.2.2017 Timo Männikkö Luento 9 Graafit ja verkot Kaaritaulukko, bittimatriisi, pituusmatriisi Verkon lyhimmät polut Floydin menetelmä Lähtevien ja tulevien kaarien listat Forward
Algoritmit 1 Luento 9 Ti 7.2.2017 Timo Männikkö Luento 9 Graafit ja verkot Kaaritaulukko, bittimatriisi, pituusmatriisi Verkon lyhimmät polut Floydin menetelmä Lähtevien ja tulevien kaarien listat Forward
Luku 8. Mekaanisen energian säilyminen. Konservatiiviset ja eikonservatiiviset. Potentiaalienergia Voima ja potentiaalienergia.
 Luku 8 Mekaanisen energian säilyminen Konservatiiviset ja eikonservatiiviset voimat Potentiaalienergia Voima ja potentiaalienergia Mekaanisen energian säilyminen Teho Tavoitteet: Erottaa konservatiivinen
Luku 8 Mekaanisen energian säilyminen Konservatiiviset ja eikonservatiiviset voimat Potentiaalienergia Voima ja potentiaalienergia Mekaanisen energian säilyminen Teho Tavoitteet: Erottaa konservatiivinen
Lineaarinen optimointi. Harjoitus 6-7, Olkoon A R m n, x, c R ja b R m. Osoita, että LP-tehtävän. c T x = min!
 Lineaarinen optimointi Harjoitus 6-7, 016. 1. Olkoon A R m n, x, c R ja b R m. Osoita, että LP-tehtävän c T x = min! (T) Ax b x 0 duaalitehtävän duaali on tehtävä (T). Ratkaisu. (P) c T x = min! Ax b x
Lineaarinen optimointi Harjoitus 6-7, 016. 1. Olkoon A R m n, x, c R ja b R m. Osoita, että LP-tehtävän c T x = min! (T) Ax b x 0 duaalitehtävän duaali on tehtävä (T). Ratkaisu. (P) c T x = min! Ax b x
TIEA382 Lineaarinen ja diskreetti optimointi
 TIEA382 Lineaarinen ja diskreetti optimointi Jussi Hakanen Tietotekniikan laitos jussi.hakanen@jyu.fi AgC 426.3 Yleiset tiedot Tietotekniikan kandidaattiopintojen valinnainen kurssi http://users.jyu.fi/~jhaka/ldo/
TIEA382 Lineaarinen ja diskreetti optimointi Jussi Hakanen Tietotekniikan laitos jussi.hakanen@jyu.fi AgC 426.3 Yleiset tiedot Tietotekniikan kandidaattiopintojen valinnainen kurssi http://users.jyu.fi/~jhaka/ldo/
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta. Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010
 TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 NSGA-II Non-dominated Sorting Genetic Algorithm (NSGA) Ehkä tunnetuin EMO-menetelmä
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 NSGA-II Non-dominated Sorting Genetic Algorithm (NSGA) Ehkä tunnetuin EMO-menetelmä
Dynaamiset regressiomallit
 MS-C2128 Ennustaminen ja Aikasarja-analyysi, Heikki Seppälä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Syksy 2015 Viikko 6: 1 Kalmanin suodatin Aiemmin käsitellyt
MS-C2128 Ennustaminen ja Aikasarja-analyysi, Heikki Seppälä Matematiikan ja systeemianalyysin laitos Perustieteiden korkeakoulu Aalto-yliopisto Syksy 2015 Viikko 6: 1 Kalmanin suodatin Aiemmin käsitellyt
PARITUS KAKSIJAKOISESSA
 PARITUS KAKSIJAKOISESSA GRAAFISSA Informaatiotekniikan t iik seminaari i Pekka Rossi 4.3.2008 SISÄLTÖ Johdanto Kaksijakoinen graafi Sovituksen peruskäsitteet Sovitusongelma Lisäyspolku Bipartite matching-algoritmi
PARITUS KAKSIJAKOISESSA GRAAFISSA Informaatiotekniikan t iik seminaari i Pekka Rossi 4.3.2008 SISÄLTÖ Johdanto Kaksijakoinen graafi Sovituksen peruskäsitteet Sovitusongelma Lisäyspolku Bipartite matching-algoritmi
Säkylän Pyhäjärven kalataloudellinen kannattavuus tulevaisuudessa
 Säkylän Pyhäjärven kalataloudellinen kannattavuus tulevaisuudessa EMMI NIEMINEN, TOHTORIKOULUTETTAVA EMMI.E.NIEMINEN@HELSINKI.FI TALOUSTIETEEN LAITOS, MAATALOUS-METSÄTIETEELLINEN TIEDEKUNTA HELSINGIN YLIOPISTO
Säkylän Pyhäjärven kalataloudellinen kannattavuus tulevaisuudessa EMMI NIEMINEN, TOHTORIKOULUTETTAVA EMMI.E.NIEMINEN@HELSINKI.FI TALOUSTIETEEN LAITOS, MAATALOUS-METSÄTIETEELLINEN TIEDEKUNTA HELSINGIN YLIOPISTO
Online-oppiva ilmavalvontajärjestelmän suorituskykymalli
 Online-oppiva ilmavalvontajärjestelmän suorituskykymalli MATINE:n tutkimusseminaari 16.11.2017 Juha Jylhä ja Marja Ruotsalainen Tampereen teknillinen yliopisto Signaalinkäsittelyn laboratorio Hankkeelle
Online-oppiva ilmavalvontajärjestelmän suorituskykymalli MATINE:n tutkimusseminaari 16.11.2017 Juha Jylhä ja Marja Ruotsalainen Tampereen teknillinen yliopisto Signaalinkäsittelyn laboratorio Hankkeelle
Testauksen tuki nopealle tuotekehitykselle. Antti Jääskeläinen Matti Vuori
 Testauksen tuki nopealle tuotekehitykselle Antti Jääskeläinen Matti Vuori Mitä on nopeus? 11.11.2014 2 Jatkuva nopeus Läpäisyaste, throughput Saadaan valmiiksi tasaiseen, nopeaan tahtiin uusia tuotteita
Testauksen tuki nopealle tuotekehitykselle Antti Jääskeläinen Matti Vuori Mitä on nopeus? 11.11.2014 2 Jatkuva nopeus Läpäisyaste, throughput Saadaan valmiiksi tasaiseen, nopeaan tahtiin uusia tuotteita
29.11.2015. Työasema- ja palvelinarkkitehtuurit IC130301. Storage. Storage - trendit. 5 opintopistettä. Petri Nuutinen
 Työasema- ja palvelinarkkitehtuurit IC130301 5 opintopistettä Petri Nuutinen 5 opintopistettä Petri Nuutinen Storage Storage hallinnassa tärkeää saatavuus laajentaminen turvaaminen optimointi Storagen
Työasema- ja palvelinarkkitehtuurit IC130301 5 opintopistettä Petri Nuutinen 5 opintopistettä Petri Nuutinen Storage Storage hallinnassa tärkeää saatavuus laajentaminen turvaaminen optimointi Storagen