Luento 6 Mittausten suunnittelu II. erikoissovellukset
|
|
|
- Sinikka Jaakkola
- 7 vuotta sitten
- Katselukertoja:
Transkriptio
1 Luento 6 Mittausten suunnittelu II 1
2 Aiheita Mittausongelman määrittely Tarkkuusluvut Suhteellinen tarkkuusluku Suhteellinen tarkkuus Tarkkuuden arvioiminen Kuvahavainnon keskivirhe Verkon rakennevakio q Sisäinen tarkkuus ja ulkoinen tarkkuus Quality Control or Process Control Tarkkuuden testaaminen 2
3 Lähteet Vanhan kurssin luento 2, Classification of 3-D measuring tasks Clive Fraser, 1989, Optimization of Networks in Non- Topographic Photogrammetry, teoksessa: Karara, H.M. (ed.), Non-Topographic Photogrammetry, 2nd Edition, ASPRS
4 Mittausongelman määrittely Aspects to be considered while defining closer the measuring problem Activity of the object Task of the measurements Dimensions of the measurements Size of the object Measuring principles Number of object points to be measured Site for the recordings Processing site Requirements concerning the measuring accuracy 4

5 Tarkka muotomittaus
6 Profiilimittaus 6

7 Pinnan kartoitus 7


8 Kappaleen mallinnus - =
9 Tarkkuusluvut Tarkkuusluvuilla ilmaistaan mm. kuvan erotuskykyyn, kuvahavaintojen keskivirheeseen ja verkon geometriaan perustuvia arvioita mittausjärjestelmän suorituskyvystä. Tarkkuusluvut voidaan ilmaista joko koordinaattien keskivirheinä tai suhteellisina tarkkuuslukuina. Kuvamittaussovellutuksissa on yhä yleisemmin ryhdytty käyttämään suhteellisia tarkkuuslukuja. Suhteellisilla tarkkuusluvuilla voidaan verrata vaihtoehtoisia mittaustilanteita ja -järjestelmiä suorituskykynsä puolesta toisiinsa. Suhteelliset tarkkuusluvut voidaan muuntaa koordinaattien keskivirheiksi, kun tunnetaan mittauskohteen koko. 9
10 Suhteellinen tarkkuusluku Proportional accuracy number Suhteellinen tarkkuusluku saadaan jakamalla kohteen päädimensio vastaavalla koordinaattikeskivirheellä. Suhteelliset tarkkuusluvut voidaan luokitella seuraavasti: < 2'000 moderate accuracy < 10'000 good accuracy < 50'000 high accuracy > 50'000 very high accuracy > 250'000 extreme accuracy 10
11 Suhteellinen tarkkuus I Proportional accuracy Suhteellinen tarkkuus on 1: [tarkkuusluku] Kuvalla suhteellinen tarkkuus voidaan arvioida, kun tunnetaan kuvahavainnon keskivirhe ja kuvan dimensio. 11
12 Proportional accuracy numbers 12
13 Proportional accuracy numbers (Fraser) Lähde: Fraser,
14 Suhteellinen tarkkuus II Taulukossa esitetyt luvut eivät ole välttämättä todellisia, vaan henkilökohtaisia 'mutu'-lukuja, mutta antavat käsityksen suhteellisen tarkkuuden suuruusluokista. Lukuja arvioitaessa on otettu huomioon myös ao. kuvauslaitteen käyttöön liityvä tavanomainen mittausmenettely, kun tehdään tarkkoja mittauksia pistemäisiin kohteisiin. Lukuihin sisältyy myös kunkin kuvauslaitteen käyttöön liittyviä tyypillisiä muita virhelähteitä, kuten kuvatason epätasomaisuus, filmin muodonmuutokset, elektroniset piirtovirheet, jne. 14
15 Suhteellinen tarkkuus III Suhteellinen tarkkuus kuvalla voidaan muuntaa likimäärin suhteelliseksi tarkkuudeksi kohteessa, kun verkon geometria tunnetaan. Sekä kohdekoordinaattien että kuvahavaintojen suhteellinen tarkkuus on samaa suuruusluokkaa silloin, kun kohteen mittaamiseen käytetään kahta kameraa tai kuvaa, kantasuhde on hyvä, luokkaa 1,5-2, ja mittauspisteet signaloidaan. 15
16 Tarkkuuden arvioiminen Likimääräinen arviointi 1: 100 / 500 / 2000 / / / / Simulointiin perustuva arviointi Testikenttäkalibrointi 16
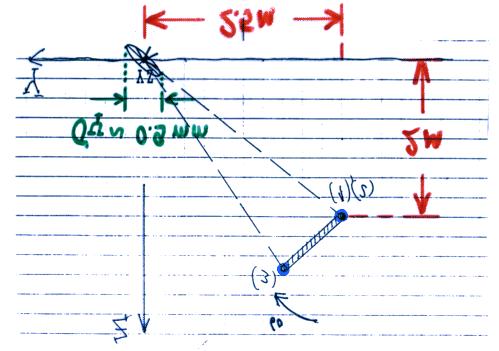
17 Likimääräinen arviointi Perustuu 2-D kuvahavainnon keskivirheen muuntamiseen keskimääräiseksi 3-D pistekeskivirheeksi mallitilassa likimääräisellä kaavalla. [pistekeskivirhe] = q x [mittakaavaluku] x [kuvahavainnon keskivirhe] Verkon rakennevakio q arvioidaan kokemuksen perusteella. 17
18 Rakennevakio s c kohdekoordinaatin keskivirhe s mittakaavaluku s kuvakoordinaatin keskivirhe s a kulmamittauksen keskivirhe q kuvausgeometriasta riippuva kerroin vahvalle geometrialle, 1.5 tavalliselle, heikohkolle jne. d kohteen keskimääräinen etäisyys kamerasta c kameran polttoväli k kuvien lukumäärä/kamera 18
19 Parallaksikaavat: q =
20 Simulointiin perustuva arviointi Estimaatit pisteiden tarkkuuksille saadaan muodostamalla ratkaistuille parametreille varianssikovarianssimatriisi. Perustuu 2-D kuvahavainnon keskivirheiden projisioimiseen mallitilaan. Lasketaan pistekohtaisesti. Ottaa huomioon kaikkien havaintojen yhteisvaikutuksen. Tuottaa "oikean" kuvan pistevirheestä kaikissa suunnissa. Mittauksessa on tärkeintä, että pisteiden tarkkuus on riittävän hyvä. 20
21 Varianssit Yhtälössä C1 sisältää ulkoisen orientoinnin ja kameran parametrien varianssit, ja C2 mitattujen pisteiden varianssit. Mittausten suunnittelulla pyritään siis saamaan C2 halutunlaiseksi. 21
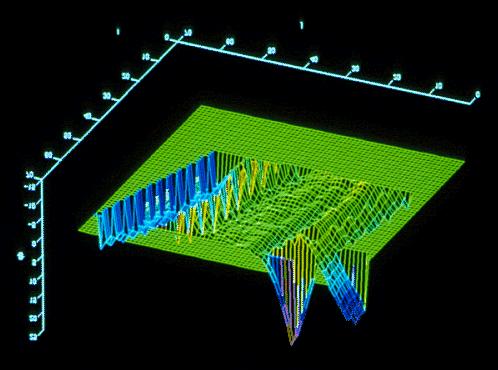
22 Tienpinnan profiilimittaus 22
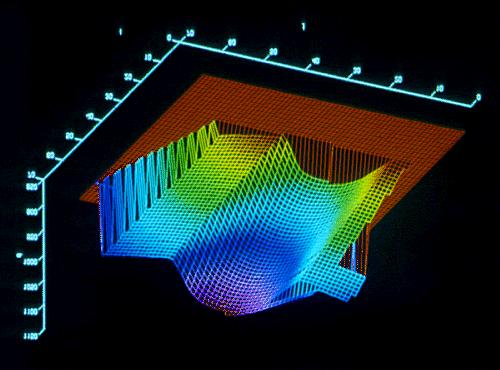
23 Tuulilasin muotomittaus 23
24 Simulointi numeerisena 24
25 Simulointi graafisena 25


26 Kokemukseen perustuva arviointi Perustuu testikentillä tai esimerkkitöissä tehtyihin vertausmittauksiin ja niistä saatuihin kokemuksiin. Näillä saadaan parhaiten käsitys koko mittausprosessin suorituskyvystä. 26
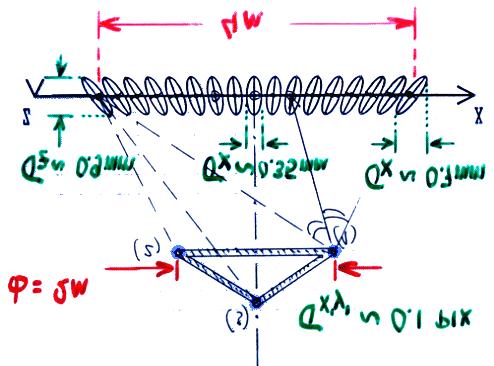
27 Kuvahavainnon keskivirhe Kokemukseen perustuvina kuvahavainnon keskivirheen arvoina voidaan pitää: 1-5 mikronia tai 0,5-0,05 pikseliä, jos mitataan signaloituja kohteita, mikronia tai 1-2 pikseliä, jos mitataan luonnollisia kohteita. Kuvahavainnon keskivirheen sijaan voidaan käyttää parallaksihavainnon keskivirhettä, kun arvioidaan stereomittauksen koordinaattikeskivirhettä kuvaussuuntaan. Parallaksihavainnon keskivirhe on luokkaa 7-20 mikronia tai 0,2-1 pikseliä. 27
28 Verkon rakennevakio q Konvergenttikuvauksissa q = 1, kun käytetään kahta kameraa, jotka sijoitetaan toistensa suhteen konvergentisti, q = 0,7, kun käytetään neljää kameraa, jotka sijoitetaan toistensa suhteen neliöön siten, että kameraryhmän etäisyys kohteesta on likimain sama kuin neliön sivu, q = 0,5, kun käytetään kahdeksaa kameraa, jotka kaikki näkevät kohteen ja ovat hyvin sekä kohteen että toistensa suhteen sijoitettuja. Käytännössä likimääräistä arviontia ei ole mielekästä perustaa verkon rakennevakioiden arvoihin, jotka olisivat pienempiä kuin 0,5. 28
29 Rakennevakio stereokuvauksissa q = 1, kuvatason suuntaisille koordinaateille, yleensä XY-koordinaateille q = 1 / [kantasuhde], kuvaussuuntaan havaituille koordinaateille 29
30 Stereokuvaus Stereokuvauksen tärkein merkitys on siinä, että se mahdollistaa kuvien käytön kohteen stereoskooppiseen tulkintaan ja visualisointiin. Mittaustarkkuus on yleisesti ottaen hyvä. Etäisyyshavaintojen osalta on huomattava, että epätarkkuus kasvaa etäisyyden neliön suhteessa. Stereomittauksen kannalta kelvollisena mittausetäisyyden rajana voidaan pitää kantasuhdetta luokkaa 1 :
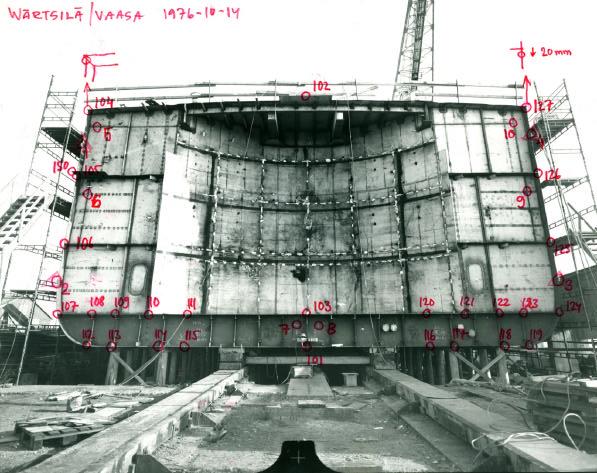
31 Ulkoinen tarkkuus: Accuracy Kalibroidun mittausjärjestelmän tarkkuus suhteessa mittanormaaleihin. Mittaustulosten epätarkkuus suhteessa "oikeisiin" tuloksiin. Muodostuu virheestä, joka on systemaattista ja deformoi mittaustulokset suhteessa referenssikoordinaatistoon. Virhe on mittausjärjestelmässä paikkariippuva eli samassa paikassa tehdyt mittaukset sisältävät saman vakiovirheen. Jos mittaustuloksia käytetään kappaleen muotopoikkeamien määrittämiseen (=> mitattu muoto - suunniteltu muoto) on tärkeää, että mittausjärjestelmän kalibrointi on mahdollisimman hyvä. Tulosten epätarkkuus sisältyy sellaisenaan laskettuun muotopoikkeamaan. 31
32 Sisäinen tarkkuus: Precision Mittausjärjestelmän toistotarkkuus Muodostuu havaintovirheistä, joiden oletetaan käyttäytyvän satunnaisesti. Mittaustuloksia käytetään kappaleen muotopoikkeamien määrittämiseen => muodonmuutos kahden mittauskerran välillä Hyvin itseään toistavissa mittaustilanteissa vakiovirhe eliminoituu muotopoikkeamia laskettaessa. Mittaustilanteen toistavuus edellyttää, että kummallakin mittauskerralla mittausjärjestelmä ja mitattava kappale ovat toistensa suhteen samassa asennossa mittauspisteet näkyvöitetään samoin, valaistusolosuhteet ovat mahdollisimman samanlaiset, jne. 32

33 Sisäinen ja ulkoinen tarkkuus 33
34 Quality Control or Process Control I QC-mittauksissa määritetään tuotettavan kappaleen muotopoikkeamia ennen tuotannon käynnistämistä, jotta voidaan varmistua siitä, että valmistettavat tuotteet ovat "oikean" muotoisia ja kokoisia. QC-mittauksissa mitataan näytekappaleet mahdollisimman täydellisesti, ja verrataan niiden muotoa CAD-malliin. 34
35 Quality Control or Process Control II PC-mittauksissa mitataan tuotannon aikaisia muotopoikkeamia, joilla tiedoilla säädetään prosessia. PC-mittauksissa mitataan kaikki kappaleet, mutta vain niiltä osin, mikä riittää muotopoikkeamien havaitsemiseen. Muotopoikkeamina laskettaessa verrataan kunkin kappaleen mittoja OC-vaiheessa tehtyihin vastaaviin mittoihin. PC-mittauksissa mittausaseman ulkoisen epätarkkuuden aiheuttama vakiovirhe eliminoituu, eikä näin ollen vaikuta havaittuun muotopoikkeamaan. Tämä edellyttää luonnollisesti sitä, että mittauskäytön aikana varmistutaan myös mittausjärjestelmän stabiiliudesta ulkoisen referenssikoordinaatiston suhteen. 35
36 Tarkkuuden testaaminen 36
37 Suunnittelun reunaehdot, kuvamittakaava Kuvamittakaava eteenpäinleikkauksen tarkkuus on suoraan verrannollinen kuvamittakaavaan polttovälin suhde kohteen ja kameran väliseen etäisyyteen tavoiteltaessa tiettyä tarkkuutta voidaan kameran maksimietäisyyttä kohteesta arvioida seuraavan kaavan avulla 37
38 Suunnittelun reunaehdot, erotuskyky Erotuskyky, resoluutio Erotuskyvyn pitää olla riittävä jotta kuvakoordinaattien mittaus on mahdollista halutulla tarkkuudella. Mitattavien kohteiden, tähysten tai muiden yksityiskohtien on oltava kooltaan sopivia. 38


39 Suunnittelun reunaehdot, tila Jos kuvaamiseen käytettävä tila on hyvin rajallinen, joudutaan turvautumaan laajakulmaiseen optiikkaan ja kamera-asemien lisäämiseen. 39
40 Suunnittelun reunaehdot, syvyysterävyys Tärkeä eteenkin ei-tasomaisissa kappaleissa kameran aukkoa pienentämällä saadaan lisää syvyysterävyyttä, mutta tällöin joudutaan pidentämään valotusaikaa tai lisäämään valaistusta 40
41 Suunnittelun reunaehdot, tähtäyskulma Tähtäyskulma, incidence angle esim. ristinmuotoisten tähysten keskipisteen määrittäminen saattaa olla vaikeaa, jos ne on kuvattu hyvin viistosta kulmasta retroheijastinten näkyvyys rajoittuu 41
42 Suunnittelun reunaehdot, pistemäärä Pisteiden määrä ja jakauma kuvilla sitä parempi mitä enemmän pisteitä ja mitä tasaisemmin ne ovat jakautuneet koko kuvan alueelle Tasainen jakautuminen on erityisen tärkeää, jos kameran kalibrointiparametrit määritetään kuvauksen yhteydessä (itsekalibrointi) 42
43 Suunnittelun reunaehdot, leikkauskulma Kuvasäteiden leikkauskulma optimaalinen n. 110 ± 30 Kuva: Luhmann, 2000 Kuva: Fraser,

44 Suunnittelun reunaehdot, kameran avauskulma Vaikuttaa kuvausetäisyyteen ja kuvien lukumäärään mittaus on sitä taloudellisempaa mitä suurempi osa kaikista pisteistä yksittäisillä kuvilla näkyy Kuva: Mapvision Ltd. 44



45 Suunnittelun reunaehdot, katveet Näkyvyys, katveet 45
46 Suunnittelun vaiheet E. Grafarend on jakanut geodeettisten verkkojen suunnittelun neljään vaiheeseen Zero-order design (ZOD) Datum First-order design (FOD) Konfiguraatio Second-order design (SOD) Painotus Third-order design (TOD) Tihennys Samaa jakoa on pyritty käyttämään myös fotogrammetriassa. Tosin TOD ei ole lähifotogrammetriassa kovinkaan oleellinen, ja sekä ZOD että SOD ovat myös huomattavasti yksinkertaisempia kuin geodeettisissa verkoissa. 46
47 Datumi ZOD 3D-pisteistöä voidaan siirtää, kiertää ja skaalata 7- parametrisella muunnoksella ilman, että sen muoto muuttuu nämä siirrot, kierrot ja mittakaava määrittävät pisteistön datumin ZOD tulee kysymykseen vain siinä tapauksessa, että datum on määritetty minimiehdoin kiinnitetään kaksi pistettä (X, Y ja Z) ja yksi korkeus Se seikka, mitkä pisteet on kiinnitetty vaikuttaa A-matriisiin, jolloin myös kovarianssimatriisi Cx muuttuu. ZOD tähtää sellaiseen datumiin, missä Cx on halutunlainen tarkkuus on tietyissä pisteissä mahdollisimman hyvä tarkkuus on mahdollisimman homogeeninen kaikissa pisteissä 47
48 Kuvausgeometria FOD I Kantasuhde kannan kasvattaminen parantaa syvyyssunnassa saavutettavaa tarkkuutta edullisemman leikkauskulman ansiosta Kamera-asemien lukumäärä kamera-asemien lisääminen parantaa tarkkuutta ja luotettavuuttavaikuttaa kuvausgeometrian suunnitteluun jos käytössä on m kameraa, on saavutettava tarkkuus m 1/2 parempi kuin kahta kameraa käyttämällä Kuvien lukumäärä / kamera-asema jos samasta kamera-asemasta otetaan k kuvaa, pienenee mitattujen pisteiden keskivirheet k -1/2 kertaisiksi tärkeä videokameroita käytettäessä (satunnaisten kuvavirheiden kompensointi) 48
49 Kuvausgeometria FOD II Pisteiden lukumäärä ja jakauma suunnittelun reunaehdot Kuvamittakaava ja polttoväli kuvamittakaavan ja mitattujen pisteiden tarkkuuden välillä on lineaarinen riippuvuus suunnittelun reunaehdot Kalibrointiparametrit yliparametrisointia varottava vankka geometria ja riittävä määrä pisteitä auttavat erottamaan tilastollisesti merkittävät ja merkityksettömät parametrit 49
50 Painotus SOD Fotogrammetrisissa mittauksissa kuvahavainnoilla on yleensä sama paino P=s -2 I Painoyksikön keskivirheeseen eli kuvamittauksen tarkkuuteen voi vaikuttaa tähysten valinnalla lisäämällä kuvien lukumäärää kuva-asemalla, eli keskiarvoistamalla resoluution lisäämisellä filmimittauksissa käyttämällä tarkempaa komparaattoria jne. 50
51 Tihennys TOD Fotogrammetrisissa mittauksissa TOD voidaan katsoa olevan osa FOD:ia. 51
52 Simulointi, Fraser 52


53 Lumikirkko Kuva: Ilkka Niini, TKK Kuva: Katri Koistinen, TKK 53
54 Optimaalinen geometria 54
Mittausten suunnittelu I
 Mittausten suunnittelu I Eteenpäinleikkaukseen perustuvan mittauksen tarkkuus riippuu kahdesta asiasta (C.S. Fraser, 1996): 1) kuvaus-/tähtäyssäteen määritystarkkuudesta 2) kuvausgeometriasta Saavutettavaa
Mittausten suunnittelu I Eteenpäinleikkaukseen perustuvan mittauksen tarkkuus riippuu kahdesta asiasta (C.S. Fraser, 1996): 1) kuvaus-/tähtäyssäteen määritystarkkuudesta 2) kuvausgeometriasta Saavutettavaa
Luento 4 Georeferointi
 Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi Maa Fotogrammetrian perusteet 1
 Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2007 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 7: Fotogrammetrinen mittausprosessi
 7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
Luento 6: 3-D koordinaatit
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Luento 7 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 7 3-D mittaus 1 Luennot 2006 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Maa-57.260. Kameran kalibrointi. TKK/Fotogrammetria/PP
 Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Kameran kalibrointi Kameran kalibroinnilla tarkoitetaan sen kameravakion, pääpisteen paikan sekä optiikan aiheuttamien virheiden määrittämistä. Virheillä tarkoitetaan poikkeamaa ideaalisesta keskusprojektiokuvasta.
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 27.9.2005) Luento 5: Kuvakoordinaattien laskeminen ja eteenpäinleikkaus Mitä pitäsi oppia? Nyt pitäisi viimeistään ymmärtää, miten kollineaarisuusyhtälöillä
Luento 9 3-D mittaus. fotogrammetriaan ja kaukokartoitukseen
 Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 9 3-D mittaus 1 Luennot 2008 JOHDANTO Koko joukko kuvia! Kuvien moniulotteisuus. LUENNOT I. Kuvien ottaminen Mitä kuvia ja miten? Mitä kuvista nähdään? II. III. IV. Kuvien esikäsittely Miten kartoituskuvat
Luento 8: Kolmiointi AIHEITA. Kolmiointi. Maa-57.301 Fotogrammetrian yleiskurssi. Luento-ohjelma 1 2 3 4 5 6 7 8 9 10
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 12.10.2004) Luento 8: Kolmiointi AIHEITA Kolmiointi Nyrkkisääntöjä Kuvablokki Blokin pisteet Komparaattorit
Luento 6 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5: Stereoskooppinen mittaaminen
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Luento 11: Stereomallin ulkoinen orientointi
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 17.2.2003, Päivityksiä: Katri Koistinen, 23.2.2004 ) Luento 11: Stereomallin ulkoinen
TTY Mittausten koekenttä. Käyttö. Sijainti
 TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
Luento 2 Stereokuvan laskeminen. 2008 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 3: Kuvahavainnot
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 22.9.2004) Luento 3: Kuvahavainnot Mitä pitäsi oppia? Viimeistään nyt pitäisi ymmärtää kuva-, komparaattori- ja kamerakoordinaatistojen
Fotogrammetrian termistöä
 Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Fotogrammetrian termistöä Petri Rönnholm, Henrik Haggrén, 2015 Hei. Sain eilen valmiiksi mukavan mittausprojektin. Kiinnostaako kuulla yksityiskohtia? Totta kai! (Haluan tehdä vaikutuksen tähän kaveriin,
Luento 6: Stereo- ja jonomallin muodostaminen
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Luento Fotogrammetrian perusteet. Henrik Haggrén
 Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Luento 8 6.5.2016 Fotogrammetrian perusteet Henrik Haggrén Sisältö Fotogrammetrinen kuvaaminen Avaruussuorat ja sädekimput Sisäinen ja ulkoinen orientointi Kollineaarisuusehto kohteen ja kuvan välillä
Luento 5. Stereomittauksen tarkkuus Maa Fotogrammetrian perusteet 1
 Luento 5 Stereomittauksen tarkkuus 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin
Luento 5 Stereomittauksen tarkkuus 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Stereokuvauksen * tarkkuuteen vaikuttavat asiat tarkkuuden arviointi, kuvauksen suunnittelu ja simulointi stereomallin
(Petri Rönnholm / Henrik Haggrén, ) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot.
 Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot.") Maa-57.301 Fotogrammetrian yleiskurssi (Petri Rönnholm / Henrik Haggrén, 12.9.2005) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot. Mitä pitäisi oppia? Palauttaa
Maa-57.301 Fotogrammetrian yleiskurssi (Petri Rönnholm / Henrik Haggrén, 12.9.2005) Luento 1: Opintojakson järjestäytyminen. Motivointia. Kertausta. Kuvamittauksen vaihtoehdot. Mitä pitäisi oppia? Palauttaa
Luento 7: Kuvan ulkoinen orientointi
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 6.10.2004) Luento 7: Kuvan ulkoinen orientointi AIHEITA Ulkoinen orientointi Suora ratkaisu Epäsuora
Otannasta ja mittaamisesta
 Otannasta ja mittaamisesta Tilastotiede käytännön tutkimuksessa - kurssi, kesä 2001 Reijo Sund Aineistot Kvantitatiivisen tutkimuksen aineistoksi kelpaa periaatteessa kaikki havaintoihin perustuva informaatio,
Otannasta ja mittaamisesta Tilastotiede käytännön tutkimuksessa - kurssi, kesä 2001 Reijo Sund Aineistot Kvantitatiivisen tutkimuksen aineistoksi kelpaa periaatteessa kaikki havaintoihin perustuva informaatio,
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry)
") Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
761121P-01 FYSIIKAN LABORATORIOTYÖT 1. Oulun yliopisto Fysiikan tutkinto-ohjelma Kevät 2016
 1 76111P-01 FYSIIKAN LABORATORIOTYÖT 1 Oulun yliopisto Fysiikan tutkinto-ohjelma Kevät 016 JOHDANTO Fysiikassa pyritään löytämään luonnosta lainalaisuuksia, joita voidaan mitata kokeellisesti ja kuvata
1 76111P-01 FYSIIKAN LABORATORIOTYÖT 1 Oulun yliopisto Fysiikan tutkinto-ohjelma Kevät 016 JOHDANTO Fysiikassa pyritään löytämään luonnosta lainalaisuuksia, joita voidaan mitata kokeellisesti ja kuvata
LIITE 1 VIRHEEN ARVIOINNISTA
 Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Luento 4: Kiertomatriisi
 Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
Maa-57.301 Fotogrammetrian yleiskurssi (P. Rönnholm / H. Haggrén, 28.9.2004) Luento 4: Kiertomatriisi Mitä pitäisi oppia? ymmärtää, että kiertomatriisilla voidaan kiertää koordinaatistoa ymmärtää, että
LIITE 1 VIRHEEN ARVIOINNISTA
 1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
Mittausjärjestelmän kalibrointi ja mittausepävarmuus
 Mittausjärjestelmän kalibrointi ja mittausepävarmuus Kalibrointi kalibroinnin merkitys kansainvälinen ja kansallinen mittanormaalijärjestelmä kalibroinnin määritelmä mittausjärjestelmän kalibrointivaihtoehdot
Mittausjärjestelmän kalibrointi ja mittausepävarmuus Kalibrointi kalibroinnin merkitys kansainvälinen ja kansallinen mittanormaalijärjestelmä kalibroinnin määritelmä mittausjärjestelmän kalibrointivaihtoehdot
LIITE 1 VIRHEEN ARVIOINNISTA
 1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
Mittaushavaintojen täsmällinen käsittelymenenetelmä
 Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
Stereopaikannusjärjestelmän tarkkuus (3 op)
") Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Mittaustulosten tilastollinen käsittely
 Mittaustulosten tilastollinen käsittely n kertaa toistetun mittauksen tulos lasketaan aritmeettisena keskiarvona n 1 x = x i n i= 1 Mittaustuloksen hajonnasta aiheutuvaa epävarmuutta kuvaa keskiarvon keskivirhe
Mittaustulosten tilastollinen käsittely n kertaa toistetun mittauksen tulos lasketaan aritmeettisena keskiarvona n 1 x = x i n i= 1 Mittaustuloksen hajonnasta aiheutuvaa epävarmuutta kuvaa keskiarvon keskivirhe
3D-kuvauksen tekniikat ja sovelluskohteet. Mikael Hornborg
 3D-kuvauksen tekniikat ja sovelluskohteet Mikael Hornborg Luennon sisältö 1. Optiset koordinaattimittauskoneet 2. 3D skannerit 3. Sovelluskohteet Johdanto Optiset mittaustekniikat perustuvat valoon ja
3D-kuvauksen tekniikat ja sovelluskohteet Mikael Hornborg Luennon sisältö 1. Optiset koordinaattimittauskoneet 2. 3D skannerit 3. Sovelluskohteet Johdanto Optiset mittaustekniikat perustuvat valoon ja
Tuulen nopeuden mittaaminen
 KON C3004 Kone ja rakennustekniikan laboratoriotyöt Koesuunnitelma / ryhmä K Tuulen nopeuden mittaaminen Matias Kidron 429542 Toni Kokkonen 429678 Sakke Juvonen 429270 Kansikuva: http://www.stevennoble.com/main.php?g2_view=core.downloaditem&g2_itemid=12317&g2_serialnumber=2
KON C3004 Kone ja rakennustekniikan laboratoriotyöt Koesuunnitelma / ryhmä K Tuulen nopeuden mittaaminen Matias Kidron 429542 Toni Kokkonen 429678 Sakke Juvonen 429270 Kansikuva: http://www.stevennoble.com/main.php?g2_view=core.downloaditem&g2_itemid=12317&g2_serialnumber=2
Mittaustekniikka (3 op)
") 530143 (3 op) Yleistä Luennoitsija: Ilkka Lassila Ilkka.lassila@helsinki.fi, huone C319 Assistentti: Ville Kananen Ville.kananen@helsinki.fi Luennot: ti 9-10, pe 12-14 sali E207 30.10.-14.12.2006 (21 tuntia)
530143 (3 op) Yleistä Luennoitsija: Ilkka Lassila Ilkka.lassila@helsinki.fi, huone C319 Assistentti: Ville Kananen Ville.kananen@helsinki.fi Luennot: ti 9-10, pe 12-14 sali E207 30.10.-14.12.2006 (21 tuntia)
Mittausepävarmuuden laskeminen
 Mittausepävarmuuden laskeminen Mittausepävarmuuden laskemisesta on useita standardeja ja suosituksia Yleisimmin hyväksytty on International Organization for Standardization (ISO): Guide to the epression
Mittausepävarmuuden laskeminen Mittausepävarmuuden laskemisesta on useita standardeja ja suosituksia Yleisimmin hyväksytty on International Organization for Standardization (ISO): Guide to the epression
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta
 Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Kojemeteorologia (53695) Laskuharjoitus 1
 Laskuharjoitus 1") Kojemeteorologia (53695) Laskuharjoitus 1 Risto Taipale 20.9.2013 1 Tehtävä 1 Erään lämpömittarin vertailu kalibrointistandardiin antoi keskimääräiseksi eroksi standardista 0,98 C ja eron keskihajonnaksi
Kojemeteorologia (53695) Laskuharjoitus 1 Risto Taipale 20.9.2013 1 Tehtävä 1 Erään lämpömittarin vertailu kalibrointistandardiin antoi keskimääräiseksi eroksi standardista 0,98 C ja eron keskihajonnaksi
Teoreettisia perusteita II
 Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
 MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
MAA4 Abittikokeen vastaukset ja perusteluja 1. Määritä kuvassa olevien suorien s ja t yhtälöt. Suoran s yhtälö on = ja suoran t yhtälö on = + 2. Onko väittämä oikein vai väärin? 2.1 Suorat =5 +2 ja =5
JUHTA - Julkisen hallinnon tietohallinnon neuvottelukunta
 JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 6: EUREF-FIN:n ja KKJ:n välinen kolmiulotteinen yhdenmuotoisuusmuunnos ja sen tarkkuus Versio: 1.0 / 3.2.2016
JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 6: EUREF-FIN:n ja KKJ:n välinen kolmiulotteinen yhdenmuotoisuusmuunnos ja sen tarkkuus Versio: 1.0 / 3.2.2016
Ratkaisu: Maksimivalovoiman lauseke koostuu heijastimen maksimivalovoimasta ja valonlähteestä suoraan (ilman heijastumista) tulevasta valovoimasta:
 tulevasta valovoimasta:") LASKUHARJOITUS 1 VALAISIMIEN OPTIIKKA Tehtävä 1 Pistemäinen valonlähde (Φ = 1000 lm, valokappaleen luminanssi L = 2500 kcd/m 2 ) sijoitetaan 15 cm suuruisen pyörähdysparaboloidin muotoisen peiliheijastimen
LASKUHARJOITUS 1 VALAISIMIEN OPTIIKKA Tehtävä 1 Pistemäinen valonlähde (Φ = 1000 lm, valokappaleen luminanssi L = 2500 kcd/m 2 ) sijoitetaan 15 cm suuruisen pyörähdysparaboloidin muotoisen peiliheijastimen
Seuraavassa taulukossa on annettu mittojen määritelmät ja sijoitettu luvut. = 40% = 67% 6 = 0.06% = 99.92% 6+2 = 0.
 T-6.28 Luonnollisen kielen tilastollinen käsittely Vastaukset, ti 7.2.200, 8:30-0:00 Tiedon haku, Versio.0. Muutetaan tehtävässä annettu taulukko sellaiseen muotoon, joka paremmin sopii ensimmäisten mittojen
T-6.28 Luonnollisen kielen tilastollinen käsittely Vastaukset, ti 7.2.200, 8:30-0:00 Tiedon haku, Versio.0. Muutetaan tehtävässä annettu taulukko sellaiseen muotoon, joka paremmin sopii ensimmäisten mittojen
Kahden suoran leikkauspiste ja välinen kulma (suoraparvia)
") Kahden suoran leikkauspiste ja välinen kulma (suoraparvia) Piste x 0, y 0 on suoralla, jos sen koordinaatit toteuttavat suoran yhtälön. Esimerkki Olkoon suora 2x + y + 8 = 0 y = 2x 8. Piste 5,2 ei ole
Kahden suoran leikkauspiste ja välinen kulma (suoraparvia) Piste x 0, y 0 on suoralla, jos sen koordinaatit toteuttavat suoran yhtälön. Esimerkki Olkoon suora 2x + y + 8 = 0 y = 2x 8. Piste 5,2 ei ole
Ilkka Mellin Todennäköisyyslaskenta Osa 3: Todennäköisyysjakaumia Moniulotteisia todennäköisyysjakaumia
 Ilkka Mellin Todennäköisyyslaskenta Osa 3: Todennäköisyysjakaumia Moniulotteisia todennäköisyysjakaumia TKK (c) Ilkka Mellin (006) 1 Moniulotteisia todennäköisyysjakaumia >> Multinomijakauma Kaksiulotteinen
Ilkka Mellin Todennäköisyyslaskenta Osa 3: Todennäköisyysjakaumia Moniulotteisia todennäköisyysjakaumia TKK (c) Ilkka Mellin (006) 1 Moniulotteisia todennäköisyysjakaumia >> Multinomijakauma Kaksiulotteinen
Tampereen yliopisto Tietokonegrafiikka 2013 Tietojenkäsittelytiede Harjoitus
 Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
Luento 10: Optinen 3-D mittaus ja laserkeilaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Kojemeteorologia. Sami Haapanala syksy 2013. Fysiikan laitos, Ilmakehätieteiden osasto
 Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Mittalaitteiden staattiset ominaisuudet Mittalaitteita kuvaavat tunnusluvut voidaan jakaa kahteen luokkaan Staattisiin
Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Mittalaitteiden staattiset ominaisuudet Mittalaitteita kuvaavat tunnusluvut voidaan jakaa kahteen luokkaan Staattisiin
Radiotekniikan sovelluksia
 Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
Virhearviointi. Fysiikassa on tärkeää tietää tulosten tarkkuus.
 Virhearviointi Fysiikassa on tärkeää tietää tulosten tarkkuus. Virhelajit A. Tilastolliset virheet= satunnaisvirheet, joita voi arvioida tilastollisin menetelmin B. Systemaattiset virheet = virheet, joita
Virhearviointi Fysiikassa on tärkeää tietää tulosten tarkkuus. Virhelajit A. Tilastolliset virheet= satunnaisvirheet, joita voi arvioida tilastollisin menetelmin B. Systemaattiset virheet = virheet, joita
Moniulotteisia todennäköisyysjakaumia
 Ilkka Mellin Todennäköisyyslaskenta Osa 3: Todennäköisyysjakaumia Moniulotteisia todennäköisyysjakaumia TKK (c) Ilkka Mellin (007) 1 Moniulotteisia todennäköisyysjakaumia >> Multinomijakauma Kaksiulotteinen
Ilkka Mellin Todennäköisyyslaskenta Osa 3: Todennäköisyysjakaumia Moniulotteisia todennäköisyysjakaumia TKK (c) Ilkka Mellin (007) 1 Moniulotteisia todennäköisyysjakaumia >> Multinomijakauma Kaksiulotteinen
Luento 4: Kuvien geometrinen tulkinta
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kuvien geometrinen tulkinta AIHEITA Muunnokset informaatiokanavassa Geometrisen tulkinnan vaihtoehdot Mittakaava
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kuvien geometrinen tulkinta AIHEITA Muunnokset informaatiokanavassa Geometrisen tulkinnan vaihtoehdot Mittakaava
Ohjeita fysiikan ylioppilaskirjoituksiin
 Ohjeita fysiikan ylioppilaskirjoituksiin Kari Eloranta 2016 Jyväskylän Lyseon lukio 11. tammikuuta 2016 Kokeen rakenne Fysiikan kokeessa on 13 tehtävää, joista vastataan kahdeksaan. Tehtävät 12 ja 13 ovat
Ohjeita fysiikan ylioppilaskirjoituksiin Kari Eloranta 2016 Jyväskylän Lyseon lukio 11. tammikuuta 2016 Kokeen rakenne Fysiikan kokeessa on 13 tehtävää, joista vastataan kahdeksaan. Tehtävät 12 ja 13 ovat
1/6 TEKNIIKKA JA LIIKENNE FYSIIKAN LABORATORIO V1.31 9.2011
 1/6 333. SÄDEOPTIIKKA JA FOTOMETRIA A. INSSIN POTTOVÄIN JA TAITTOKYVYN MÄÄRITTÄMINEN 1. Työn tavoite. Teoriaa 3. Työn suoritus Työssä perehdytään valon kulkuun väliaineissa ja niiden rajapinnoissa sädeoptiikan
1/6 333. SÄDEOPTIIKKA JA FOTOMETRIA A. INSSIN POTTOVÄIN JA TAITTOKYVYN MÄÄRITTÄMINEN 1. Työn tavoite. Teoriaa 3. Työn suoritus Työssä perehdytään valon kulkuun väliaineissa ja niiden rajapinnoissa sädeoptiikan
Luento 4 Kolmiulotteiset kuvat. fotogrammetriaan ja kaukokartoitukseen
 Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Inversio-ongelmien laskennallinen peruskurssi Luento 4
 Inversio-ongelmien laskennallinen peruskurssi Luento 4 Kevät 20 Regularisointi Eräs keino yrittää ratkaista (likimääräisesti) huonosti asetettuja ongelmia on regularisaatio. Regularisoinnissa ongelmaa
Inversio-ongelmien laskennallinen peruskurssi Luento 4 Kevät 20 Regularisointi Eräs keino yrittää ratkaista (likimääräisesti) huonosti asetettuja ongelmia on regularisaatio. Regularisoinnissa ongelmaa
Tarkkuuden hallinta mittausprosessissa
 - Tarkkuuden hallinta mittausprosessissa Tauno Suominen/ Nordic GeoCenter Oy 21.03.2018 kuva: Tampereen kaupunki/idis Design Oy Nordic GeoCenter Oy Suomen vanhin geodeettisten 3D-laserskannereiden maahantuontiin,
- Tarkkuuden hallinta mittausprosessissa Tauno Suominen/ Nordic GeoCenter Oy 21.03.2018 kuva: Tampereen kaupunki/idis Design Oy Nordic GeoCenter Oy Suomen vanhin geodeettisten 3D-laserskannereiden maahantuontiin,
Harjoitus 7: NCSS - Tilastollinen analyysi
 Harjoitus 7: NCSS - Tilastollinen analyysi Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tilastollinen testaus Testaukseen
Harjoitus 7: NCSS - Tilastollinen analyysi Mat-2.2107 Sovelletun matematiikan tietokonetyöt Syksy 2006 Mat-2.2107 Sovelletun matematiikan tietokonetyöt 1 Harjoituksen aiheita Tilastollinen testaus Testaukseen
Vastepintamenetelmä. Kuusinen/Heliövaara 1
 Vastepintamenetelmä Kuusinen/Heliövaara 1 Vastepintamenetelmä Vastepintamenetelmässä pyritään vasteen riippuvuutta siihen vaikuttavista tekijöistä approksimoimaan tekijöiden polynomimuotoisella funktiolla,
Vastepintamenetelmä Kuusinen/Heliövaara 1 Vastepintamenetelmä Vastepintamenetelmässä pyritään vasteen riippuvuutta siihen vaikuttavista tekijöistä approksimoimaan tekijöiden polynomimuotoisella funktiolla,
Vanhankaupunginkosken ultraäänikuvaukset Simsonar Oy Pertti Paakkolanvaara
 Vanhankaupunginkosken ultraäänikuvaukset 15.7. 14.11.2014 Simsonar Oy Pertti Paakkolanvaara Avaintulokset 2500 2000 Ylös vaellus pituusluokittain: 1500 1000 500 0 35-45 cm 45-60 cm 60-70 cm >70 cm 120
Vanhankaupunginkosken ultraäänikuvaukset 15.7. 14.11.2014 Simsonar Oy Pertti Paakkolanvaara Avaintulokset 2500 2000 Ylös vaellus pituusluokittain: 1500 1000 500 0 35-45 cm 45-60 cm 60-70 cm >70 cm 120
JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit
 JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit Versio: 1.0 Julkaistu: 6.9.2019 Voimassaoloaika: toistaiseksi 1 FIN2005N00 1.1 Mallin luonti ja tarkkuus FIN2005N00 on korkeusmuunnospinta,
JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit Versio: 1.0 Julkaistu: 6.9.2019 Voimassaoloaika: toistaiseksi 1 FIN2005N00 1.1 Mallin luonti ja tarkkuus FIN2005N00 on korkeusmuunnospinta,
1. Olkoot vektorit a, b ja c seuraavasti määritelty: a) Määritä vektori. sekä laske sen pituus.
 Määritä vektori. sekä laske sen pituus.") Matematiikan kurssikoe, Maa4 Vektorit RATKAISUT Sievin lukio Keskiviikko 12.4.2017 VASTAA YHTEENSÄ VIITEEN TEHTÄVÄÄN! MAOL JA LASKIN/LAS- KINOHJELMAT OVAT SALLITTUJA! 1. Olkoot vektorit a, b ja c seuraavasti
Matematiikan kurssikoe, Maa4 Vektorit RATKAISUT Sievin lukio Keskiviikko 12.4.2017 VASTAA YHTEENSÄ VIITEEN TEHTÄVÄÄN! MAOL JA LASKIN/LAS- KINOHJELMAT OVAT SALLITTUJA! 1. Olkoot vektorit a, b ja c seuraavasti
JAKSO 2 KANTA JA KOORDINAATIT
 JAKSO 2 KANTA JA KOORDINAATIT Kanta ja dimensio Tehtävä Esittele vektoriavaruuden kannan määritelmä vapauden ja virittämisen käsitteiden avulla ja anna vektoriavaruuden dimension määritelmä Esittele Lause
JAKSO 2 KANTA JA KOORDINAATIT Kanta ja dimensio Tehtävä Esittele vektoriavaruuden kannan määritelmä vapauden ja virittämisen käsitteiden avulla ja anna vektoriavaruuden dimension määritelmä Esittele Lause
Harha mallin arvioinnissa
 Esitelmä 12 Antti Toppila sivu 1/18 Optimointiopin seminaari Syksy 2010 Harha mallin arvioinnissa Antti Toppila 13.10.2010 Esitelmä 12 Antti Toppila sivu 2/18 Optimointiopin seminaari Syksy 2010 Sisältö
Esitelmä 12 Antti Toppila sivu 1/18 Optimointiopin seminaari Syksy 2010 Harha mallin arvioinnissa Antti Toppila 13.10.2010 Esitelmä 12 Antti Toppila sivu 2/18 Optimointiopin seminaari Syksy 2010 Sisältö
ja J r ovat vektoreita ja että niiden tulee olla otettu saman pyörimisakselin suhteen. Massapisteen hitausmomentti on
 FYSA210 / K1 HITAUSMOMENTTI Työn tavoitteena on opetella määrittämään kappaleen hitausmomentti kappaletta pyörittämällä ja samalla havainnollistaa kitkan vaikutusta. Massapisteinä toimivat keskipisteestään
FYSA210 / K1 HITAUSMOMENTTI Työn tavoitteena on opetella määrittämään kappaleen hitausmomentti kappaletta pyörittämällä ja samalla havainnollistaa kitkan vaikutusta. Massapisteinä toimivat keskipisteestään
3 Lineaariset yhtälöryhmät ja Gaussin eliminointimenetelmä
 1 3 Lineaariset yhtälöryhmät ja Gaussin eliminointimenetelmä Lineaarinen m:n yhtälön yhtälöryhmä, jossa on n tuntematonta x 1,, x n on joukko yhtälöitä, jotka ovat muotoa a 11 x 1 + + a 1n x n = b 1 a
1 3 Lineaariset yhtälöryhmät ja Gaussin eliminointimenetelmä Lineaarinen m:n yhtälön yhtälöryhmä, jossa on n tuntematonta x 1,, x n on joukko yhtälöitä, jotka ovat muotoa a 11 x 1 + + a 1n x n = b 1 a
Työ 21 Valon käyttäytyminen rajapinnoilla. Työvuoro 40 pari 1
 Työ 21 Valon käyttäytyminen rajapinnoilla Työvuoro 40 pari 1 Tero Marttila Joel Pirttimaa TLT 78949E EST 78997S Selostuksen laati Tero Marttila Mittaukset suoritettu 12.11.2012 Selostus palautettu 19.11.2012
Työ 21 Valon käyttäytyminen rajapinnoilla Työvuoro 40 pari 1 Tero Marttila Joel Pirttimaa TLT 78949E EST 78997S Selostuksen laati Tero Marttila Mittaukset suoritettu 12.11.2012 Selostus palautettu 19.11.2012
Erikoistekniikoita. Moiré - shadow-moiré - projection-moiré. Rasterifotogrammetria - yhden juovan menetelmä - monen juovan menetelmä
 Erikoistekniikoita Moiré - shadow-moiré - projection-moiré Rasterifotogrammetria - yhden juovan menetelmä - monen juovan menetelmä Tomografia - periaate Hologrammetria - periaate Motografia Moiré-tekniikka
Erikoistekniikoita Moiré - shadow-moiré - projection-moiré Rasterifotogrammetria - yhden juovan menetelmä - monen juovan menetelmä Tomografia - periaate Hologrammetria - periaate Motografia Moiré-tekniikka
Materiaali on lineaarinen, jos konstitutiiviset yhtälöt ovat jännitys- ja muodonmuutostilan suureiden välisiä lineaarisia yhtälöitä.
 JÄNNITYS-JAMUODONMUUTOSTILANYHTYS Materiaalimalleista Jännitys- ja muodonmuutostila ovat kytkennässä toisiinsa ja kytkennän antavia yhtälöitä sanotaan materiaaliyhtälöiksi eli konstitutiivisiksi yhtälöiksi.
JÄNNITYS-JAMUODONMUUTOSTILANYHTYS Materiaalimalleista Jännitys- ja muodonmuutostila ovat kytkennässä toisiinsa ja kytkennän antavia yhtälöitä sanotaan materiaaliyhtälöiksi eli konstitutiivisiksi yhtälöiksi.
Työ 2324B 4h. VALON KULKU AINEESSA
 TURUN AMMATTIKORKEAKOULU TYÖOHJE 1/5 Työ 2324B 4h. VALON KULKU AINEESSA TYÖN TAVOITE Työssä perehdytään optisiin ilmiöihin tutkimalla valon kulkua linssisysteemeissä ja prismassa. Tavoitteena on saada
TURUN AMMATTIKORKEAKOULU TYÖOHJE 1/5 Työ 2324B 4h. VALON KULKU AINEESSA TYÖN TAVOITE Työssä perehdytään optisiin ilmiöihin tutkimalla valon kulkua linssisysteemeissä ja prismassa. Tavoitteena on saada
ASUINKERROSTALON ÄÄNITEKNISEN LAADUN ARVIOINTI. Mikko Kylliäinen
 ASUINKERROSTALON ÄÄNITEKNISEN LAADUN ARVIOINTI Mikko Kylliäinen Insinööritoimisto Heikki Helimäki Oy Dagmarinkatu 8 B 18, 00100 Helsinki kylliainen@kotiposti.net 1 JOHDANTO Suomen rakentamismääräyskokoelman
ASUINKERROSTALON ÄÄNITEKNISEN LAADUN ARVIOINTI Mikko Kylliäinen Insinööritoimisto Heikki Helimäki Oy Dagmarinkatu 8 B 18, 00100 Helsinki kylliainen@kotiposti.net 1 JOHDANTO Suomen rakentamismääräyskokoelman
Luento 3 Kuvaus- ja mittauskalusto. erikoissovellukset
 Luento 3 Kuvaus- ja mittauskalusto 1 Aiheita Mittakamerat Digitaaliset kamerat Komparaattorit Ohjelmistot 2 Photogrammetry 1907 27 stations 111 photographs 7 geodetic control points 3 Photogrammetric documentation
Luento 3 Kuvaus- ja mittauskalusto 1 Aiheita Mittakamerat Digitaaliset kamerat Komparaattorit Ohjelmistot 2 Photogrammetry 1907 27 stations 111 photographs 7 geodetic control points 3 Photogrammetric documentation
Numeeriset menetelmät TIEA381. Luento 8. Kirsi Valjus. Jyväskylän yliopisto. Luento 8 () Numeeriset menetelmät / 35
 Numeeriset menetelmät / 35") Numeeriset menetelmät TIEA381 Luento 8 Kirsi Valjus Jyväskylän yliopisto Luento 8 () Numeeriset menetelmät 11.4.2013 1 / 35 Luennon 8 sisältö Interpolointi ja approksimointi Funktion approksimointi Tasainen
Numeeriset menetelmät TIEA381 Luento 8 Kirsi Valjus Jyväskylän yliopisto Luento 8 () Numeeriset menetelmät 11.4.2013 1 / 35 Luennon 8 sisältö Interpolointi ja approksimointi Funktion approksimointi Tasainen
Luento 3: 3D katselu. Sisältö
 Tietokonegrafiikan perusteet T-.43 3 op Luento 3: 3D katselu Lauri Savioja Janne Kontkanen /27 3D katselu / Sisältö Kertaus: koordinaattimuunnokset ja homogeeniset koordinaatit Näkymänmuodostus Kameran
Tietokonegrafiikan perusteet T-.43 3 op Luento 3: 3D katselu Lauri Savioja Janne Kontkanen /27 3D katselu / Sisältö Kertaus: koordinaattimuunnokset ja homogeeniset koordinaatit Näkymänmuodostus Kameran
3.6 Su-estimaattorien asymptotiikka
 3.6 Su-estimaattorien asymptotiikka su-estimaattorit ovat usein olleet puutteellisia : ne ovat usein harhaisia ja eikä ne välttämättä ole täystehokkaita asymptoottisilta ominaisuuksiltaan ne ovat yleensä
3.6 Su-estimaattorien asymptotiikka su-estimaattorit ovat usein olleet puutteellisia : ne ovat usein harhaisia ja eikä ne välttämättä ole täystehokkaita asymptoottisilta ominaisuuksiltaan ne ovat yleensä
Tekijä Pitkä matematiikka Pisteen (x, y) etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.
 etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.") Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
Suorakulmainen kolmio
 Suorakulmainen kolmio 1. Määritä terävä kulma α, β ja γ, kun sinα = 0,5782, cos β = 0,745 ja tanγ = 1,222. π 2. Määritä trigonometristen funktioiden sini, kosini ja tangentti, kun kulma α = ja 3 β = 73,2
Suorakulmainen kolmio 1. Määritä terävä kulma α, β ja γ, kun sinα = 0,5782, cos β = 0,745 ja tanγ = 1,222. π 2. Määritä trigonometristen funktioiden sini, kosini ja tangentti, kun kulma α = ja 3 β = 73,2
Testejä suhdeasteikollisille muuttujille
 Ilkka Mellin Tilastolliset menetelmät Osa 3: Tilastolliset testit Testejä suhdeasteikollisille muuttujille TKK (c) Ilkka Mellin (007) 1 Testejä suhdeasteikollisille muuttujille >> Testit normaalijakauman
Ilkka Mellin Tilastolliset menetelmät Osa 3: Tilastolliset testit Testejä suhdeasteikollisille muuttujille TKK (c) Ilkka Mellin (007) 1 Testejä suhdeasteikollisille muuttujille >> Testit normaalijakauman
7.4 Fotometria CCD kameralla
 7.4 Fotometria CCD kameralla Yleisin CCDn käyttötapa Yleensä CCDn edessä käytetään aina jotain suodatinta, jolloin kuvasta saadaan siistimpi valosaaste UV:n ja IR:n interferenssikuviot ilmakehän dispersion
7.4 Fotometria CCD kameralla Yleisin CCDn käyttötapa Yleensä CCDn edessä käytetään aina jotain suodatinta, jolloin kuvasta saadaan siistimpi valosaaste UV:n ja IR:n interferenssikuviot ilmakehän dispersion
Moniulotteisia todennäköisyysjakaumia. Moniulotteisia todennäköisyysjakaumia. Moniulotteisia todennäköisyysjakaumia: Mitä opimme?
 TKK (c) Ilkka Mellin (4) Moniulotteisia todennäköisyysjakaumia Johdatus todennäköisyyslaskentaan Moniulotteisia todennäköisyysjakaumia TKK (c) Ilkka Mellin (4) Moniulotteisia todennäköisyysjakaumia: Mitä
TKK (c) Ilkka Mellin (4) Moniulotteisia todennäköisyysjakaumia Johdatus todennäköisyyslaskentaan Moniulotteisia todennäköisyysjakaumia TKK (c) Ilkka Mellin (4) Moniulotteisia todennäköisyysjakaumia: Mitä
Motocrosspyörien melupäästömittaukset
 Suomen Moottoriliitto ry. Juha Korhonen Jussi Kurikka-Oja Meluselvitysraportti 30.9.2014 30.9.2014 1 (8) SISÄLTÖ 1 LÄHTÖKOHDAT... 2 2 MELUPÄÄSTÖMITTAUKSET... 2 2.1 Mittausteoriaa... 2 2.2 Mittaustoiminta...
Suomen Moottoriliitto ry. Juha Korhonen Jussi Kurikka-Oja Meluselvitysraportti 30.9.2014 30.9.2014 1 (8) SISÄLTÖ 1 LÄHTÖKOHDAT... 2 2 MELUPÄÄSTÖMITTAUKSET... 2 2.1 Mittausteoriaa... 2 2.2 Mittaustoiminta...
Betonin suhteellisen kosteuden mittaus
 Betonin suhteellisen kosteuden mittaus 1. BETONIN SUHTEELLISEN KOSTEUDEN TARKOITUS 2. KOHTEEN LÄHTÖTIEDOT 3. MITTAUSSUUNNITELMA 4. LAITTEET 4.1 Mittalaite 4.2 Mittalaitteiden tarkastus ja kalibrointi 5.
Betonin suhteellisen kosteuden mittaus 1. BETONIN SUHTEELLISEN KOSTEUDEN TARKOITUS 2. KOHTEEN LÄHTÖTIEDOT 3. MITTAUSSUUNNITELMA 4. LAITTEET 4.1 Mittalaite 4.2 Mittalaitteiden tarkastus ja kalibrointi 5.
Osoita, että kaikki paraabelit ovat yhdenmuotoisia etsimällä skaalauskuvaus, joka vie paraabelin y = ax 2 paraabelille y = bx 2. VASTAUS: , b = 2 2
 8. Geometriset kuvaukset 8.1. Euklidiset kuvaukset 344. Esitä muodossa x = Ax + b se avaruuden E 3 peilauskuvaus, jonka symmetriatasona on x 1 3x + x 3 = 6. A = 1 3 6 6 3, b = 1 1 18. 3 6 6 345. Tason
8. Geometriset kuvaukset 8.1. Euklidiset kuvaukset 344. Esitä muodossa x = Ax + b se avaruuden E 3 peilauskuvaus, jonka symmetriatasona on x 1 3x + x 3 = 6. A = 1 3 6 6 3, b = 1 1 18. 3 6 6 345. Tason
Deformoituvan metallirakenteen fotogrammetrinen muodonmuutosmittaus
 Deformoituvan metallirakenteen fotogrammetrinen muodonmuutosmittaus Diplomityö, joka on jätetty opinnäytteenä tarkastettavaksi diplomi-insinöörin tutkintoa varten. Espoo, huhtikuu 2015 Tekniikan kandidaatti
Deformoituvan metallirakenteen fotogrammetrinen muodonmuutosmittaus Diplomityö, joka on jätetty opinnäytteenä tarkastettavaksi diplomi-insinöörin tutkintoa varten. Espoo, huhtikuu 2015 Tekniikan kandidaatti
Oikeanlaisten virtapihtien valinta Aloita vastaamalla seuraaviin kysymyksiin löytääksesi oikeantyyppiset virtapihdit haluamaasi käyttökohteeseen.
 Oikeanlaisten virtapihtien valinta Aloita vastaamalla seuraaviin kysymyksiin löytääksesi oikeantyyppiset virtapihdit haluamaasi käyttökohteeseen. 1. Tuletko mittaamaan AC tai DC -virtaa? (DC -pihdit luokitellaan
Oikeanlaisten virtapihtien valinta Aloita vastaamalla seuraaviin kysymyksiin löytääksesi oikeantyyppiset virtapihdit haluamaasi käyttökohteeseen. 1. Tuletko mittaamaan AC tai DC -virtaa? (DC -pihdit luokitellaan
Ilkka Mellin Tilastolliset menetelmät Osa 2: Otokset, otosjakaumat ja estimointi Estimointi
 Ilkka Mellin Tilastolliset menetelmät Osa 2: Otokset, otosjakaumat ja estimointi Estimointi TKK (c) Ilkka Mellin (2006) 1 Estimointi >> Todennäköisyysjakaumien parametrit ja niiden estimointi Hyvän estimaattorin
Ilkka Mellin Tilastolliset menetelmät Osa 2: Otokset, otosjakaumat ja estimointi Estimointi TKK (c) Ilkka Mellin (2006) 1 Estimointi >> Todennäköisyysjakaumien parametrit ja niiden estimointi Hyvän estimaattorin
Johdatus todennäköisyyslaskentaan Moniulotteisia todennäköisyysjakaumia. TKK (c) Ilkka Mellin (2005) 1
 Ilkka Mellin (2005) 1") Johdatus todennäköisyyslaskentaan Moniulotteisia todennäköisyysjakaumia TKK (c) Ilkka Mellin (005) 1 Moniulotteisia todennäköisyysjakaumia Multinomijakauma Kaksiulotteinen normaalijakauma TKK (c) Ilkka
Johdatus todennäköisyyslaskentaan Moniulotteisia todennäköisyysjakaumia TKK (c) Ilkka Mellin (005) 1 Moniulotteisia todennäköisyysjakaumia Multinomijakauma Kaksiulotteinen normaalijakauma TKK (c) Ilkka
Mittausepävarmuuden laskeminen ISO mukaisesti. Esimerkki: Campylobacter
 Mittausepävarmuuden laskeminen ISO 19036 mukaisesti. Esimerkki: Campylobacter Marjaana Hakkinen Erikoistutkija, Elintarvike- ja rehumikrobiologia Mikrobiologisten tutkimusten mittausepävarmuus 18.3.2019
Mittausepävarmuuden laskeminen ISO 19036 mukaisesti. Esimerkki: Campylobacter Marjaana Hakkinen Erikoistutkija, Elintarvike- ja rehumikrobiologia Mikrobiologisten tutkimusten mittausepävarmuus 18.3.2019
Differentiaali- ja integraalilaskenta 2 (CHEM) MS-A0207 Hakula/Vuojamo Kurssitentti, 12.2, 2018, arvosteluperusteet
 MS-A0207 Hakula/Vuojamo Kurssitentti, 12.2, 2018, arvosteluperusteet") ifferentiaali- ja integraalilaskenta 2 (CHEM) MS-A27 Hakula/Vuojamo Kurssitentti, 2.2, 28, arvosteluperusteet T Moniosaisten tehtävien osien painoarvo on sama ellei muuta ole erikseen osoitettu. Kokeessa
ifferentiaali- ja integraalilaskenta 2 (CHEM) MS-A27 Hakula/Vuojamo Kurssitentti, 2.2, 28, arvosteluperusteet T Moniosaisten tehtävien osien painoarvo on sama ellei muuta ole erikseen osoitettu. Kokeessa
Maa-57.1030 Fotogrammetrian perusteet
 Maa-57.1030 Fotogrammetrian perusteet Luento 8 Kartoitussovellukset Petri Rönnholm/Henrik Haggrén Mitä fotogrammetrisella kartoituksella tuotetaan? 3D koordinaatteja kohteesta Maaston korkeusmalli Topograafiset
Maa-57.1030 Fotogrammetrian perusteet Luento 8 Kartoitussovellukset Petri Rönnholm/Henrik Haggrén Mitä fotogrammetrisella kartoituksella tuotetaan? 3D koordinaatteja kohteesta Maaston korkeusmalli Topograafiset
Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 13.10.2004) Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus AIHEITA Stereomittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 13.10.2004) Luento 9: Analyyttinen stereomittaus. Kuvien oikaisu. Ortokuvaus AIHEITA Stereomittaus
Videotoisto Nexus 7 tableteilla: Android 4.4 KitKat selvästi edellistä versiota heikompi
 Videotoisto Nexus 7 tableteilla: Android 4.4 KitKat selvästi edellistä versiota heikompi - Android 4.3 Jelly Bean ja 4.4 Kitkat käyttöjärjestelmien videotoiston suorituskyvyn vertailu Nexus 7 tabletilla
Videotoisto Nexus 7 tableteilla: Android 4.4 KitKat selvästi edellistä versiota heikompi - Android 4.3 Jelly Bean ja 4.4 Kitkat käyttöjärjestelmien videotoiston suorituskyvyn vertailu Nexus 7 tabletilla
Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen
 Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen Mittausten laadun tarkastus ja muunnoskertoimien laskenta Kyösti Laamanen 2.0 4.10.2013 Prosito 1 (9) SISÄLTÖ 1 YLEISTÄ...
Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen Mittausten laadun tarkastus ja muunnoskertoimien laskenta Kyösti Laamanen 2.0 4.10.2013 Prosito 1 (9) SISÄLTÖ 1 YLEISTÄ...
Estimointi. Vilkkumaa / Kuusinen 1
 Estimointi Vilkkumaa / Kuusinen 1 Motivointi Tilastollisessa tutkimuksessa oletetaan jonkin jakauman generoineen tutkimuksen kohteena olevaa ilmiötä koskevat havainnot Tämän mallina käytettävän todennäköisyysjakauman
Estimointi Vilkkumaa / Kuusinen 1 Motivointi Tilastollisessa tutkimuksessa oletetaan jonkin jakauman generoineen tutkimuksen kohteena olevaa ilmiötä koskevat havainnot Tämän mallina käytettävän todennäköisyysjakauman
Luento 4: Kolmiointihavainnot
 Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Maa-57.220 Fotogrammetrinen kartoitus Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 4: Kolmiointihavainnot Luento 4: Kolmiointihavainnot Reconstruction procedure Kuvahavainnot Kollineaarisuusyhtälö
Tilastollisen analyysin perusteet Luento 8: Lineaarinen regressio, testejä ja luottamusvälejä
 Tilastollisen analyysin perusteet Luento 8: Lineaarinen regressio, testejä ja luottamusvälejä arvon Sisältö arvon Bootstrap-luottamusvälit arvon arvon Oletetaan, että meillä on n kappaletta (x 1, y 1 ),
Tilastollisen analyysin perusteet Luento 8: Lineaarinen regressio, testejä ja luottamusvälejä arvon Sisältö arvon Bootstrap-luottamusvälit arvon arvon Oletetaan, että meillä on n kappaletta (x 1, y 1 ),