Mikko Tappola. Koneohjauksen käyttäminen laadunosoitukseen
|
|
|
- Tapani Jääskeläinen
- 8 vuotta sitten
- Katselukertoja:
Transkriptio
 Maanmittaustekniikka Insinöörityö 1.3.")
1 Mikko Tappola Koneohjauksen käyttäminen laadunosoitukseen Metropolia Ammattikorkeakoulu Insinööri (AMK) Maanmittaustekniikka Insinöörityö
2 Tiivistelmä Tekijä Otsikko Sivumäärä Aika Mikko Tappola Koneohjauksen käyttäminen laadunosoitukseen 23 sivua + 1 liitettä Tutkinto insinööri (AMK) Tutkinto-ohjelma Ohjaajat maanmittaustekniikka lehtori Reijo Aalto laatupäällikkö Roope Korpela tekninen johtaja Pertti Heininen koneohjaus Krister Lönnberg tuotantoinsinööri Janne Mononen Tämän opinnäytetyön tarkoituksena oli tutkia koneohjausjärjestelmien mittaustarkkuuksia suhteessa perinteisiin tarkemittausmenetelmiin. Näiden kahden metodin eroja vertailemalla on tarkoitus selvittää mahdollisuus hyödyntää koneohjausjärjestelmiä osana laadunosoitusmenettelyä. Tutkimukseen liittyviä mittauksia toteutettiin kolmella eri maanrakennustyömaalla Espoossa. Näin toimittiin, jotta saataisiin mahdollisimman kattava vertailuaineisto. Mittaukset suoritettiin yhteistyössä työmaalla toimivien koneohjausjärjestelmällä varustettujen kaivinkoneiden kuljettajien kanssa. Mitattavina rakenteina oli pääasiassa tien eri rakennekerroksia sekä vesihuoltojärjestelmien putkien selkiä. Saatujen mittausaineistojen käsittely ja tarkistaminen suoritettiin 3D-Win-ohjelmalla ja keskiarvojen ja muiden matemaattisten vertailuarvojen laskemisessa hyödynnettiin Exceliä. Näillä ohjelmilla saatiin selvitettyä koneohjausjärjestelmien tarkkuus niin pintavertailuna kuin yksittäisien pisteiden vertailuina. Molemmilla vertailutavoilla päästiin alle InfraRYLin lopputuotteen laatuvaatimuksien. Silti katveisilla alueilla mittaustarkkuudet eivät olleet yhtä hyviä kuin olettaa saattoi. Lopullisena johtopäätöksenä voi pitää, että koneohjausjärjestelmää voi hyödyntää osana laadunosoitusmenettelyä. Näin on etenkin silloin, kun rakenne on toteutettu samalla koneohjausjärjestelmällä ja kuljettajille on ohjeistettu tarkemittaus hyvin ja selkeästi. Avainsanat koneohjaus, laadunosoitus, maanrakennus
3 Abstract Author Title Number of Pages Date Mikko Tappola Using machine control to indicate quality 23 pages + 1 appendices 1 March 2016 Degree Bachelor of Engineering Degree Programme Instructors Land Surveying Reijo Aalto, Senior Lecturer Roope Korpela, Quality Manager Pertti Heininen, Technical Director Krister Lönnberg, InfraBIM Modelling Janne Mononen, Technical Engineer The purpose of this Bachelor s thesis was to study whether it is possible to use a machine controlled excavator instead of more traditional methods to indicate quality of survey measurements. The study was carried out by comparing surveying data from a machine controlled excavator to data retrieved by a surveyor with a total station. To ensure proper data for the comparison, the surveying data was collected from three different construction sites located in Espoo. The surveys were performed in cooperation with the drivers of the machine controlled excavators. The surveys focused mainly on various road structures. The survey data was processed and checked for mistakes with 3D-Win software. MS Excel was used to calculate the averages and other mathematical reference values used when comparing the machine control data to the data from a total station. The results showed that the data surveyed with machine controlled excavators was almost as precise as that retrieved with a total station. However, working in GPS blind spots weakened the precision. In conclusion, a machine controlled excavator can with benefit be part of the quality control procedure together with traditional surveying methods. Keywords machine control, quality control, construction
4 Sisällys 1 Johdanto 1 2 Mittaustekniikat ja mittalaitteet Robottitakymetri D-koneohjausjärjestelmä Sisäinen orientointi Ulkoinen orientointi satelliittipaikannuksella Satelliittipaikannuksen virhetekijät Toteumapistemittaukset koneohjausjärjestelmällä Koneohjausjärjestelmien etäseuranta 9 3 Laadunvarmistuksen tarkkuusvaatimukset Laadunvarmistusmittaukset yleisesti väylähankkeissa Yleiset vaatimukset koneohjaukselle: InfraRYL ja YIV Koneohjauksella saavutettava teoreettinen tarkkuus Perinteisellä mittauksella saavutettava tarkkuus Mittalaitteiden laadunvarmistus 12 4 Mittaussuunnitelma Projektit Kauklahdenväylä ja Kurttilan alue Länsi-Espoon vesijohto Saunaniemen asemakaava-alue Mittapisteet, mittalaitteet ja ketjun sisäinen tarkkuus Pisteverkot ja mittausmäärät Kalibrointiverkkoa koskevat määrittelyt ja vaatimukset Mitattavat rakenteet ja kohteet Mittaus- ja käyttöolosuhteiden epätarkkuuksien määrittelyt Koneohjauksen käyttö tarkkuutta heikentävissä olosuhteissa Aineiston käsittely 17 5 Johtopäätökset Koneohjauksella saavutettava todellinen tarkkuus Koneohjauksella saavutettavan tarkkuuden riittävyys Koneohjauksella toteutetun mittauksen luotettavuus 19
5 6 Yhteenveto 20 Lähteet 22 Liitteet Liite 1. Tarkemittausohje työkoneen kuljettajille
6 Lyhenteet ja käsitteet Glonass Globalnaja navigatsionnaja sputnikovaja sistema. Venäläinen satelliittipaikannusjärjestelmä. GNSS Global Navigation Satellite System. Maailmanlaajuinen satelliittipaikannusjärjestelmä. Tällä hetkellä osajärjestelminä ovat GPS ja Glonass. Myös valmiudet eurooppalaiselle Galileo- ja kiinalaiselle Compass-satelliittipaikannusjärjestelmille. gooni Kulman mittausyksikkö, joka on 1/100 suorasta kulmasta. Käytetään pääasiassa maanmittaustekniikassa. GPS Global Positioning System. Yhdysvaltalainen satelliittipaikannusjärjestelmä. Ensimmäinen siviilikäyttöön vapautettu järjestelmä. IMU Inertial Measurement Unit. Inertianmittausalusta, jonka avulla tietokone pystyy laskemaan ja mallintamaan kaivinkoneen puomin liikkeet koneohjausjärjestelmässä. MEMS Micro Electro Mechanical System. IMU-yksikön osa, joka mittaa yksikön kiihtyvyyttä piikiteen liikkeen perusteella. RTK Real Time Kinematic. Satelliittimittausmetodi, jossa tunnetun aseman avulla korjataan vastaanottimiin saapuva signaalia, jolloin saavutetaan senttimetritarkkuus.
7 1 1 Johdanto Tässä insinöörityössä perehdytään koneohjaukseen ja sen tarkkuuteen. Koneohjauksella tarkoitetaan työkoneenkuljettajan opastamista koneessa olevan näytön avulla, jossa näkyvät tarvittavat tiedot itsenäiseen rakentamiseen. Nykyisin koneohjausjärjestelmiä hyödynnetään jo kattavasti maanrakennustöiden toteutuksessa maastomallien avulla. Urakoitsijat haluavat tehostaa koneohjausjärjestelmien hyödyntämistä. Seuraava vaihe on hyväksyttää tilaajilla koneohjausjärjestelmien käyttäminen laadunosoitukseen eli toteumatietojen mittaamiseen mittamiehen sijasta. Tämän insinöörityön tavoitteena on todentaa koneohjauksen käyttö toimivana ja luotettavan osana laadunvarmistusmenettelyä sekä tutkia, onko koneohjausjärjestelmän paikannustarkkuus tarpeeksi hyvä, jotta sillä mitatut toteumapisteet voidaan hyödyntää toteumakuvissa. Selvitys toteutetaan Graniittirakennus Kallio Oy:n infrarakennushankkeilla pääkaupunkiseudulla. Koneohjausjärjestelmän käytännön tarkkuus selvitetään vertailemalla kaivinkoneella mitattuja toteumapisteitä vastaaviin takymetrillä mitattuihin tarkepisteisiin. Tavoitteena on osoittaa, että koneohjausjärjestelmä on tarkka ja luotettava menetelmä laadunosoitukseen. Tarkkuuksien vertailun avulla pyritään todentamaan, että tulevaisuudessa tarkkeiden mittaaminen voitaisiin siirtää mittahenkilöstöltä työkoneidenkuljettajille. Tällä saavutettaisiin tehokkaampi työn eteneminen. Työn painopiste on laadunosoituksen tutkimisessa, ei niinkään mittaustekniikoiden perusteiden käsittelyssä.

8 2 2 Mittaustekniikat ja mittalaitteet Tässä luvussa käsitellään työssä käytettävät mittaustekniikat ja laitteet. Mittaustekniikkana mittamiehen osalta käytetään takymetrimittausta, jotta saavutetaan mahdollisimman todenmukainen vertailu. Mittalaitteena on Leican TS15-takymetri. Toisena vertailun kohteena on koneohjausjärjestelmä, joka on Scanlaserin Leica PowerDigger 3D. Koneohjausjärjestelmä toimii satelliittipaikannuksella. 2.1 Robottitakymetri Robottitakymetrillä mitataan kulmia ja etäisyyksiä. Näiden havaintojen avulla kojeessa oleva ohjelmisto laskee tarkat koordinaatit halutuille kohteille. Robottitakymetrin etu edeltäjiinsä nähden on, että sen käyttö hoituu yhdeltä mittaajalta kahden sijasta. Takymetri seuraa automaattisesti mittaajan käyttämää prismaa (kuva 1). [16, s. 3.] Kuva 1. Insinöörityön mittauksissa käytetään kuvan mukaista Leican TS15-robottitakymetriä sekä prismasauvaa, jossa on kiinnitettynä maastotallennin. Takymetrillä mitattaessa tulee noudattaa niin sanottua hyvää mittaustapaa. Hyvällä mittaustavalla tarkoitetaan hyväksi koettuja ja todennettuja mittausmenetelmiä ja käytäntöjä. Hyvä mittaustapa voidaan jakaa kolmeen pääsääntöihin. 1. Käsitteiden ja esitystapojen tulee olla alan käytännön mukaisia, jotta muidenkin alalla työskentelevien on helppo ymmärtää ja hyödyntää mittausten tuloksia. 2. Mittalaitteet tulee huoltaa ja tar-
9 3 kistaa säännöllisesti ja tarpeen vaatiessa kalibroida uudestaan. 3. Mittauksissa kiinnitetään huomiota toistojen laatuun ja sellaisten havaintomenetelmien käyttöön, joilla voidaan hallita mittausten virheitä. [16, s. 8.] Maanrakennustyömailla käytetään pääasiassa vain vapaalle asemapisteelle orientointia johtuen sen paremmasta soveltuvuudesta muuttuviin tilanteisiin. Vapaalle asemapisteelle orientoitaessa takymetri sijoitetaan ennalta tuntemattomaan paikkaan. Takymetrille saadaan tunnettu sijainti eli koordinaatit mittaamalla vähintään kolme tunnettua tähystä eli esimerkiksi tarroja, joiden koordinaatit ovat ennalta tiedossa. Orientoinnin varmistamiseksi olisi hyvä vielä tarkistaa orientointi tähtäämällä neljännelle tähykselle, mikäli mahdollista. [14, s ; 16, s. 13.] Takymetrissä on sisäiseen tarkkuuteen vaikuttavia systemaattisia ja satunnaisia virheitä. Systemaattiset virheet saadaan poistettua mittaustuloksista kalibroinnilla ja laskentaan tehtävillä korjauksilla (esim. sääkorjaus). Satunnaisvirheisiin ei pysty vaikuttamaan, koska niiden aiheuttajat ovat ennalta arvaamattomia. Satunnaisvirheitä voivat olla esimerkiksi ilman lämpöväreily, tärinä tai jokin muu vastaava ajasta tai paikasta riippuva häiriötekijä. Jokainen havainto sisältää vähän satunnaisvirhettä, mutta näitä voidaan analysoida tilastollisilla menetelmillä. Tilastollisista menetelmistä useimmiten käytetään Gaussin käyrää, joka kuvaa satunnaisten virheiden jakautumista tasaisesti kaikkiin mittaustuloksiin. [3, s ; 9, s ] Takymetrillä mitattaessa mittauskaukoputki tähdätään prismaan tai käytetään robottitakymetrin automaattista prisman haku ja lukinta toimintoa. Kun takymetri on tähdätty tai lukittu prismaan, sillä voidaan mitata kulma ja etäisyys suhteessa asemapisteeseen. [9. s. 246.] Kulmahavainnot saadaan takymetrin pysty- ja vaakakulmakehiltä sähköisesti ja automatisoidusti mittauksen suorituksen jälkeen. Tyypillinen takymetrin kulmanerotuskyky on 0,1 mgon eli 0,0001 goonia. [9, s. 248.] Takymetrin etäisyyden mittaukseen käytetään elektro-optista mittaustapaa. Elektro-optisessa mittauksessa vertaillaan takymetrin lähettämän signaalin ja prismasta heijastuvan signaalin kantoaallon värähtelyä. Signaalista mitattava matka saadaan vaihe-eromittauksella. Vaihe-eromittauksessa lasketaan kokonaiset aallonpituudet ja osa-aallonpituus eli vaihe-ero. Näiden avulla koje saa laskettua prisman etäisyyden takymetristä. Etäisyyden
10 4 mittauksen tyypillinen tarkkuus on 1 5 mm, ja sen lisäksi laitevalmistajat antavat kojeen ja prisman välimatkasta riippuvan virheen, jonka yksikkö on ppm (parts per million). [16, s ] 2.2 3D-koneohjausjärjestelmä 3D-koneohjausjäjestelmällä tarkoitetaan työkoneen kuljettajan avuksi luotua opastavaa järjestelmää, joka kertoo reaaliajassa esimerkiksi kaivinkoneen kauhan sijainnin koordinaatistossa. Koneohjausjärjestelmällä varustetut työkoneet sisältävät muuten normaalin työkoneen lisäksi tietokoneyksikön, näyttöpäätteen, satelliittivastaanottimia (2 kpl), gsm/radiomodeemin, virtalähteen sekä antureista. Tietokoneyksikkö vastaa satelliittivastaanottimista ja antureista saadun tiedon prosessoinnista laskentaohjelmalla ja sen välittämisestä käyttäjälle näyttöpäätteen kautta. Tietokoneyksikkö saa GSM-modeemilta korjaussignaalin tukiasemaverkosta, jonka pohjalta se laskee työkoneelle sijainnin sekä järjestelmän toiminnan kannalta välttämättömän satelliittien geometrian. Tukiasemaverkko voi olla joko työmaakohtainen oma tukiasema tai virtuaalinen tukiasema, josta kerrotaan lisää luvussa [1, s. 3; 8, s ; 14, s. 3 4.] IMU-yksiköitä eli inertianmittausalustat asennetaan työkoneen runkoon sekä jokaiseen nivellettyyn osaan, joka vaikuttaa koneohjausjärjestelmään määritetyn mittauspisteen sijaintiin kuten kaivinkoneen kauhan huulilevy. IMU-yksiköissä hyödynnetään MEMS-kiihtyvyysantureita, joiden toiminta perustuu piikiteeseen ja sen liikkeen muutoksen mittaamiseen. Tästä saadulla tiedolla tietokoneyksikkö laskee mittauspisteen sijainnin suhteessa satelliiteista saatuun sijaintiin. Näin saadaan mittauspisteen x-, y- ja z-koordinaatit. Antureiden antamien tietojen pohjalta tietokoneyksikkö laskee työkoneelle vastaavan geometrian kuin satelliiteillekin. [13, s ; 14, s. 4 5.] Koneohjausjärjestelmän ideana on saavuttaa työkoneelle tarkka sijainti hankealueella ja välittää tämä tieto työkoneen kuljettajalle, jonka on helppo havainnollistaa työkoneen sijainti ja halutun pinnan sijainti maastossa näyttöpäätteeltä. Jotta näyttöpäätteelle saadaan selkeä 3D-kuva, laitteistoon pitää tuoda toteutusmalli XML- tai DXF-formaatissa. [13, s : 14 s. 37.]
.")
11 Sisäinen orientointi Koneohjausjärjestelmän sisäinen orientointi jakautuu kahteen osaan. Ensimmäisenä määritellään työkoneen geometria eli työkoneen sisäinen koordinaatisto. Merkitsevät tekijät kaivinkoneen sisäisessä orientoinnissa on puominosien ja antennijärjestelmän sijainti suhteessa kaivinkoneen pyörähdysakseliin nähden (kuva 2). Pyörähdysakseli toimii ikään kuin koordinaatiston origona. Kaivinkoneen kaikkien puomien pituudet tulee määrittää kauhasta aina runkoon saakka. Koneohjausjärjestelmän ohjelmisto osaa määrittää annetuista puomien pituuksista ja antureista kauhan mittauspisteen sijainnin suhteessa pyörähdysakseliin. [6, s. 7 9; 14, s. 3 6.] Jälkimmäinen vaihe sisäisen orientoinnin saavuttamiseksi on määrittää satelliittiantennien sijainti suhteessa työkoneen pyörähdysakseliin. Satelliittiantennit asennetaan kaivinkoneen vastapainon puolelle metrin korkuisen jalustan päälle, jotta vältytään kaivinkoneen ohjaamon aiheuttamalta katveelta. Jos sisäinen orientointi tehdään väärin tai se epäonnistuu, tämä aiheuttaa järjestelmän virheellisen toiminnan. [6, s. 7 9; 14, s. 3 6.] Kuva 2. Koneohjausjärjestelmän tärkeimpien komponenttien sijainti kaivinkoneessa, jotta sisäinen orientointi voidaan suorittaa [19] Ulkoinen orientointi satelliittipaikannuksella Koneohjausjärjestelmän ulkoinen orientointi vastaa satelliittipaikannuksella saatavaa sijaintia. Satelliittipaikantaminen perustuu maapalloa kiertäviin satelliitteihin, joita ovat yhdysvaltalaiset GPS-satelliitit ja venäläiset Glonass-satelliitit. Näiden lisäksi ovat kehitteillä eurooppalaisten Galileo- ja kiinalaisten Compass-satelliitit. Satelliitit lähettävät sig-
12 6 naalia eri aallonpituuksilla. Signaaleihin on sijoitettu tiedot satelliitin numerosta, sijainnista kiertoradalla ja kellonaika. Näiden tietojen avulla vastaanottimet maassa selvittävät etäisyyden satelliitteihin kantoaaltojen aallonpituuden avulla. Kun vastaanottimella on tarvittava määrä satelliitteja näkyvillä, voi vastaanotin laskea sijaintinsa. [4, s ; 9, s ] Useimmiten mittausalalla satelliittipaikannuksesta puhuttaessa tarkoitettaan RTK- ja verkko-rtk-paikannusta. RTK eli real time kinematic eli reaaliaikainen kinemaattinen mittaaminen perustuu suhteellisen paikanmääritykseen. Sillä saavutetaan välittömästi vastaanottimen sijainti senttimetritarkkuudella. RTK-paikannuksen oleellinen osa on toinen vastaanotin, mittaajan vastaanottimen lisäksi, joka sijaitsee tunnetulla pisteellä. Tunnetulla pisteellä sijaitsevaa vastaanotinta kutsutaan referenssiasemaksi. Vastaanottimet havaitsevat satelliiteista tulevat kantoaallot ja laskevat niiden aallonpituuksien avulla etäisyyden satelliitteihin. Kun vastaanottimet ovat saaneet etäisyydet vähintään neljään eri satelliittiin, saadaan laskennalla vastaanottimille tarkat koordinaatit. Referenssiaseman koordinaatteja verrataan tunnettuihin koordinaatteihin, josta saadaan korjausarvo mittaajan vastaanottimelle. Mittaajan vastaanotin korjaa omia havaintojaan ja sijaintiaan korjausarvojen perusteella, jolloin saavutetaan lopullinen paikannustarkkuus noin 1 2 senttimetrin välille taso- sekä korkeuskoordinaatistossa (kuva 3). [9, s ; 12, s ; 14, s ] Kuva 3. Yksinkertaistettu esimerkki satelliittien ja referenssiaseman toiminnasta, jonka avulla työkoneelle saadaan tarkka sijainti [11].

13 7 RTK-mittauksessa käytettävän korjausdatan lähettäminen vastaanottimeen tapahtuu joko radiomodeemilla tai matkapuhelinverkossa. Radiomodeemia käytettäessä realistinen kantama on kuuden kilometrin luokkaa maastosta riippuen. Matkapuhelinverkossa tiedonsiirrolla ei ole käytännössä kantamarajaa, mutta mittaustavan omien rajoitteiden vuoksi suositeltavaa on pyrkiä toimimaan 10 kilometrin säteellä referenssiasemasta, jotta tarvittava tarkkuus saavutetaan. [12, s ; 14, s ] Verkko-RTK-paikannus toimii vastaavasti kuin RTK-paikannus, mutta sen toiminta säde on yhtä laaja kuin tukiasemaverkkokin. Verkko-RTK perustuu tukiasemaverkkoon. Tämä menetelmä perustuu useammasta referenssiasemasta eli tukiasemasta saadun korjausdatan määrään. Laajan verkon avulla saadaan paremmin mallinnettua pois ilmakehän aiheuttamat virheet paikannukseen. Leican omaa tukiasemaverkkoa kutsutaan Smart- Netiksi. Se kattaa lähes koko Suomen lukuun ottamat Pohjois-Suomen syrjäisimpiä seutuja. SmartNet koostuu yli sadasta kiinteästä tukiasemasta (kuva 4), jotka lähettävät jatkuvasti korjausdataa vastaanottimille. Verkko-RTK on muuten yhtä tarkka menetelmä, mutta johtuen tukiasemien mahdollisesta sijaitsemisesta yli 10 kilometrin etäisyydellä vastaanottimesta saattaa korkeussijainnin tarkkuus pudota 3 4 senttimetrin luokkiin. Tästä johtuen yleensä työmaille perustetaan oma tukiasema tukemaan korkeustarkkuutta. [11, s ; 14, s ] Kuva 4. Leican SmartNet-tukiasemaverkon yli 100 tukiasemaa kattavat koko Suomen [18].
14 Satelliittipaikannuksen virhetekijät Satelliittipaikannuksen virhetekijöistä voidaan puhua myös mittausolosuhteina. Epäedullisissa olosuhteissa tehtyihin mittauksiin liittyy enemmän virhettä (epävarmuutta) kuin hyvissä olosuhteissa tehtyihin. Virhettä paikannukseen aiheuttavat satelliittien sijainti taivaalla ja niiden geometria, ilmakehä ja monitieheijastukset kuten rakennuksista heijastuvat signaalit. Korjausdatan vastaanottoa häiritsee voimakkaat sähkömagneettisen säteilyn lähteet, kuten sähkö- ja voimalinjat. [9, s ; 11, s ] Satelliittigeometria tarkoittaa satelliittien sijoittumista taivaalle suhteessa mittaajaan. Geometria on hyvä silloin, kun satelliitteja on tasaisesti koko näkyvän taivaan alueella. Monitieheijastuksilla tarkoitetaan vastaanottimen tulevien signaalien heijastumista lähellä olevista rakenteista tai ympäristötekijöistä, kuten rakennukset ja puusto. Heijastuminen aiheuttaa virhettä tarkkuuteen, kun signaali ei tule suorinta reittiä vastaanottimeen. Ilmakehän vaikutus mittauksien tarkkuuteen perustuu ionos- ja troposfäärin vaikutukseen signaalien kulkuaikaan. Suurin vaikutus on lähellä horisonttia, koska signaalit joutuvat kulkemaan pidemmän aikaa ilmakehässä. Tämän takia satelliittipaikantimet hylkäävät automaattisesti satelliitit, jotka sijaitsevat alle 20 asteen kulmassa horisontista. [9, s ; 14, s ] Toteumapistemittaukset koneohjausjärjestelmällä Koneohjausjärjestelmällä varustetun kaivinkoneen kaikki käytössä olevat kauhat on määritelty mitoiltaan järjestelmään, jotta konekuski voi mitata tarkepisteitä millä tahansa kauhalla. Kauhojen mittasuhteet eroavat toisistaan, mutta jokaisessa on perusperiaatteena kolme eri mittapistettä, kauhan huulen keskikohta sekä huulen molemmat reunat. Kaivinkoneen kuljettaja voi vaihtaa mittapistettä tehtävän työn tai tarpeen mukaan. (Kuva 5.) [14, s ]


15 9 Kuva 5. Työkoneen kuljettajalla olevan päätteen näkymä rakenteiden työstö- ja mittausvaiheessa. Kuvassa kuljettaja on valinnut mittapisteeksi kauhan keskikohdan Koneohjausjärjestelmien etäseuranta Kaikkia työmaalla toimivia koneohjausjärjestelmällä toimivia koneita voi seurata Leica Geosystemsin oman etäyhteyttä hyödyntävän internetsovelluksen avulla nimeltään icon Telematics (kuva 6). Sovelluksessa näkee reaaliajassa kaikkien työkoneiden sijainnit kartalla sekä, mitä referenssitiedostoa ne käyttävät työskentelyyn. Sovelluksen kautta saa myös helposti siirrettyä tarvittavat tiedostot työkoneisiin, ja sama toimii, kun työkoneiden mittaamat toteumapisteet halutaan saada editoitaviksi toteumamallia varten. Kuva 6. Internetsovellus icon Telematicsin näkymä Kauklahdenväylän työmaalta. Sovelluksessa voi seurata reaaliajassa työkoneiden sijaintia [20].
16 10 3 Laadunvarmistuksen tarkkuusvaatimukset 3.1 Laadunvarmistusmittaukset yleisesti väylähankkeissa Väylähankkeiden tierakenteille on asetettu InfraRYLssä kahdenlaisia vaatimuksia; toimivuus- ja teknisiä vaatimuksia. Toimivuusvaatimuksissa määritellään tien ominaisuudet ja niiden vaatimukset. Esimerkiksi tien pinnan pitää olla tasainen ja ehyt, eikä se saa olla haitallisen liukas. Tekniset vaatimukset ovat tien rakentamisen ja lopputuotteen materiaali-, mitta- ja tiiviysvaatimuksia, jotka väylän tulee täyttää. Teknisissä vaatimuksissa määritellään myös rakenteille sallitut poikkeamat sekä laadunvarmistusmittausten tarve ja määrä. [7.] Tien geometrian laadunvarmistamiseksi tehdään mittauksia tien kaikista maa-, pohja- ja kalliorakenteista, päällys- ja pintarakenteista, vesihuoltojärjestelmistä sekä rakennusteknisistä rakennusosista kuten sillat. Näiden kaikkien toteumille on määrätty omat toleranssiarvot sekä poikkeamarajat suunnitelmaan verrattuna. Mittauksilla osoitetaan rakennettujen pintojen korkeus-, sijainti- ja kaltevuustietojen laatu. [2, s.20 21; 7.] Edellä esitettyjen vaatimusten toteutumista tulee seurata ja dokumentoida jatkuvasti hankkeen edetessä mittamiehen toimesta ja koneohjausjärjestelmällä mittamiehen ohjeistuksen mukaisesti. Hankkeen valmistututtua mittauksista kootaan laadunvarmistuskansio, joka pitää sisällään kaiken mittausaineiston. [2, s.20 21; 8, s ] 3.2 Yleiset vaatimukset koneohjaukselle: InfraRYL ja YIV2015 InfraRYL on rakennustietokokoelma yleisistä laatuvaatimuksista infrahankkeissa. Kokoelma on laadittu määrittelemään hyvä ja laadukas rakennustapa myös niissä tilanteissa, kun hankkeen osapuolet ovat eri mieltä. Kokoelma sisältää kaksi erillistä laadullista osiota: toimivuus- ja tekniset vaatimukset. Toimivuusvaatimuksia ovat rakenteen elinkaareen liittyvät laatu. Tekniset vaatimukset kohdistuvat rakenteen valmistumishetkenä vaadittuun laatuun, joista tärkeimmät ilmenevät taulukosta 1. [7.]
17 11 Taulukko 1. InfraRYLin sallimat poikkeamat rakenteissa ja koneohjausjärjestelmiltä vaadittava tarkkuus näitä rakenteita työstettäessä [7]. Rakenneosa Suurin sallittu yks. sijainnin poikkeama Suurin sallittu yks. korkeuden poikkeama mm mm mm Koneohjausjärjestelmältä vaadittava tarkkuus XY;Z Maaleikkaus, -0/ / ;+-30 maapenger Louhepenger -0/ / ;+-30 Suodatinkerros -0/ ;+-30 Jakavakerros -0/ ;+-30 Kantavakerros -0/ ;+-30 InfraRYLn lisäksi on valmisteilla rakenteiden mallintamiseen liittyvät ohjeistukset, jotta tilaajilla ja palvelujen tarjoajilla olisi yhteinen näkemys siitä, mitä ja milloin mallinnetaan. Näitä ohjeita on työstetty vuodesta 2014 alkaen, ja tällä hetkellä puolet tulevista ohjeistuksista ovat lausunnolla eri toimijoilla. Puolet ohjeistuksista, jotka olivat loppuvuodesta 2014 lausunnolla, julkaistiin YIV2015 eli inframallivaatimukset antavat tällä hetkellä vain suuntaa siitä, mitä tulevaisuudessa tullaan vaatimaan koneohjausjärjestelmien tarkkuudesta, mikäli niitä käytetään rakentamiseen tai laadunvarmistamiseen. [5.] 3.3 Koneohjauksella saavutettava teoreettinen tarkkuus Laitevalmistajien antamat teoreettiset paikannustarkkuudet ovat tasossa 10 mm + 1 ppm ja korkeudessa 20 mm + 1 ppm. Teoriassa koneohjausjärjestelmien paikannustarkkuuden tulisi riittää rakenteiden tekemiseen ja oman työn laadunvarmistukseen toteumapisteitä mittaamalla. [10.] 3.4 Perinteisellä mittauksella saavutettava tarkkuus Perinteisellä mittauksella tarkoitetaan tässä yhteydessä takymetrillä suoritettavia tarkemittauksia mittamiehen toimesta. Takymetrillä suoritetut mittaukset toimivat tutkimuksen absoluuttisena nollatuloksena ja vertailukohtana. Takymetrimittauksella saavutettavaan tarkkuuteen vaikuttaa muutama eri asia. Vaikuttavia tekijöitä ovat työmaalle tuotujen lähtöpisteiden tarkkuus ja niistä tehtävä takymetrin
18 12 orientointi vapaalle asemapisteelle sekä mittamiehen inhimillinen virhe. Parhaimmillaan takymetrillä mitattuun kohteeseen tuleva virhe on noin 5 mm. Tämä on tarpeettoman tarkkaa mittaamista suurimpaan osaan tarkemitattavista kohteista. 3.5 Mittalaitteiden laadunvarmistus Satelliittimittalaitteiden laadunvarmistus perustuu hyvään satelliittigeometriaan ja gsmtai radioyhteydellä saatavaan korjausdataan tukiasemilta. Muita mittausten laatuun vaikuttavia seikkoja ovat katveet kuten puusto ja rakennukset, jotka joko estävät tai heijastavat satelliittisignaaleja kulkemasta vastaanottimeen. Myös ilmakehän eri kerrokset vaikuttavat signaalien kulkuun ja lopulliseen mittaustarkkuuteen. Kun kaikki edellä mainitut tekijät on otettu huomioon, satelliittipaikannusjärjestelmillä päästään tyydyttävään tarkkuuteen, joka on tasokoordinaatistossa 10 mm + 1 ppm ja korkeuden virhe on 20 mm + 1 ppm. Mittalaitteista on kerrottu tarkemmin luvussa 2. [9, s ] 4 Mittaussuunnitelma 4.1 Projektit Insinöörityötä varten valittiin kolme kohdetyömaata, jotka eroavat toisistaan mitattavilta rakenteiltaan ja olosuhteiltaan. Työmaat ovat Graniittirakennus Kallion maanrakennushankkeita Espoossa. Kauklahdessa on näistä kaksi ja kolmas sijaitsee Länsi-Espoossa Suurpellon alueella. Kauklahdessa rakennetaan pääasiassa väyliä sekä kunnallistekniikkaa ja Suurpellolla pääpainopiste on runkovesijohdon rakentamisessa (kuva 7).
![13 Kuva 7. Kartta työmaiden sijainneista suhteessa toisiinsa [21]. 4.1.1 Kauklahdenväylä ja Kurttilan alue Yhtenä kolmesta projektin kohdetyömaista toimii Kauklahdenväylän parantaminen ja Kurttilan alueen kunnallistekniikan perustaminen.](/docs-images/64/51642703/images/19-0.jpg "Projektiin kuuluu myös Lasimäenlaakson vanhan kaatopaikan peittäminen sekä kulkuväylän rakentaminen Lasilaakson asuinalueelle.")
19 13 Kuva 7. Kartta työmaiden sijainneista suhteessa toisiinsa [21] Kauklahdenväylä ja Kurttilan alue Yhtenä kolmesta projektin kohdetyömaista toimii Kauklahdenväylän parantaminen ja Kurttilan alueen kunnallistekniikan perustaminen. Projektiin kuuluu myös Lasimäenlaakson vanhan kaatopaikan peittäminen sekä kulkuväylän rakentaminen Lasilaakson asuinalueelle. Tämä projekti on pääpainopisteenä mittauksissa, johtuen alueelle rakennettavien rakenteiden monipuolisuudesta ja alueella toimivien koneohjausjärjestelmällä toimivien kaivinkoneiden määrästä verrattuna muihin työmaihin. Alueelle tehdään useita erilaisia rakenteita perinteisestä kadunrakentamisesta harvinaisempaan kaatopaikan peittämiseen. Kadunrakentamisen yhteydessä asennetaan myös tarpeelliset vesihuollon putket sekä tele- ja sähkösuojaputket. Suurin osa työmaan rakenteista tehdään kaivinkoneilla, joissa on koneohjausjärjestelmä. Näillä kaivinkoneilla otetaan samalla tehdyistä rakenteista toteumatietoa, jota verrataan takymetrillä mitattuun tarkepisteaineistoon Länsi-Espoon vesijohto Toisena vertailuprojektina on Länsi-Espooseen Suurpellon ja Kuurinniityn välille rakennettava runkovesijohto. Rakennusurakan pääkohteena on rakentaa hieman yli kaksi ki-
20 14 lometriä vesijohtoa uutta asuinaluetta varten. Urakkaan kuuluu myös vähän kunnallistekniikan rakentamista tulevan asuinalueen perustaksi. Projekti valittiin osaksi työtäni, koska osa vesijohdon rakentamisesta tapahtuu puustosta aiheutuvalla katveen alueella Saunaniemen asemakaava-alue Saunaniemen asemakaava alue sijaitsee vajaan kilometrin päässä Kurttilan alueesta. Saunaniemen alueella rakennetaan pääasiassa katurakenteita sekä kunnallistekniikkaa. Alue on suurimmaksi osin avointa peltoaukeaa, joten alueella mittauksien varmuuden ja tarkkuuden tulisi olla hyvä. 4.2 Mittapisteet, mittalaitteet ja ketjun sisäinen tarkkuus Lähtöpisteinä mittauksille käytetään työmaalle perustettua lähtöpisteverkkoa. Lähtöpisteet on tuotu Espoon kaupungin käyttökiintopisteistä. Mittalaitteina käytetään takymetriä Leica TS15 mittamiehen toimesta ja vertailukohteena satelliittipaikannuksella toimivaa Scanlaserin Leica PowerDigger-3D-koneohjausjärjestelmää. Mittausten sisäinen tarkkuus varmistetaan toteuttamalla mittauksia tarvittava määrä, jotta voidaan eliminoida mittauksien satunnaiset virheet pois. Systemaattiset ja karkeat virheet eliminoidaan käsin kun aineistoa käsitellään mittausten jälkeen. Yleisin systemaattisen virheen aiheuttaja on kalibroimaton mittalaite, ja karkeita virheitä voi tulla mittaajan huolimattomuudesta. Mittausketjulle saadaan hyvä sisäinen tarkkuus, kun mittalaitteet on kalibroitu oikein ja mittaajat ovat ammattitaitoisia ja hyvin ohjeistettuja. 4.3 Pisteverkot ja mittausmäärät Koneohjausjärjestelmällä mitataan toteumapisteitä viiden metrin välein linjamaisista kohteista kuten vesijohto ja alueelliset kohteet mitataan 5 m kertaa 5 m ruutuun kuten pyörätien jakavan kerroksen pinta. Myös mittamies mittaa samalla tiheydellä, mutta takymetrillä. Näin toimitaan, jotta saadaan mahdollisimman kattava ja tarkka mittausaineisto vertailua varten. Tarkepisteitä mitattaessa tavoitteena olisi mitata joka kymmenes piste samasta kohtaa ja mieluiten samaan aikaan molemmilla sekä koneohjauksella että takymetrillä. Tämän tarkoituksena olisi saada eksaktia tietoa koneohjauksen tarkkuudesta suhteessa takymetrin tarkkuuteen ilman alueellisia vaihteluita.
21 Kalibrointiverkkoa koskevat määrittelyt ja vaatimukset Koneohjausjärjestelmille tehdään työmaalle kalibrointiverkko, jonka avulla voidaan seurata järjestelmien tarkkuutta päivittäin työn edetessä. Kalibrointiverkko pitää olla koko työmaan kattava ja suhteellisen tiheä, että sen käyttö olisi mielekästä ja tehokasta. Kalibrointiverkon pisteiden materiaalin ja sijoittelun pitää olla tarkkaan suunniteltua, jotta saataisiin taattua pisteiden säilyvyys ja luotettavuus niiden tarkkuuteen. Pisteet tulisi sijoittaa kiinteisiin kohteisiin kuten kallioon tai johonkin vastaavaan kiinteään elementtiin. 4.5 Mitattavat rakenteet ja kohteet Mitattavia rakenteita ja kohteita ovat teiden rakennekerrokset, vesihuoltojärjestelmät ja - laitteet, kaapelisuojaputket, luiskien taitepisteet, avo-ojan vesijuoksu, kalliot sekä betonirakenteet. Rakennekerroksista mitataan kolme pistettä jokaisesta poikkileikkauksesta taiteviivojen kohdalta (kuva 8). Vesihuoltojärjestelmät mitataan normaalista tavasta poiketen putkien selistä, jotta mittaus onnistuu tarkasti myös kaivinkoneilla. Kuva 8. Ote työkoneiden kuljettajille jaetuista ohjeista toteumapisteiden mittaukseen liittyen.
22 Mittaus- ja käyttöolosuhteiden epätarkkuuksien määrittelyt Koneohjausjärjestelmällä mittaaminen katveisilla alueilla heikentää mitattujen arvojen luotettavuutta. Katveilla tarkoitetaan lähinnä puustoa ja korkeita rakennuksia. Katveet estävät tai häiritsevät satelliittivastaanottimia saamasta satelliiteista lähtevää sijaintitietoa, jota järjestelmä käyttää laskiessaan koneen sijaintia. Takymetrillä mittaaminen onnistuu katveisilla alueilla, mutta sillä ei voi mitata rankassa vesi- tai lumisateessa tai pimeässä toisin kuin satelliittipaikannuksella toimivilla työkoneilla. Takymetrin tarkkuuteen vaikuttaa myös ilman lämpöväreily etenkin pidemmillä matkoilla. Nämä ongelmat johtuvat takymetrin vaatimasta näköyhteydestä mitattavaan kohteeseen. 4.7 Koneohjauksen käyttö tarkkuutta heikentävissä olosuhteissa Koneohjauksen käyttö katveisilla alueilla on mahdollista, mutta kyseenalaista, johtuen satelliittimittauksen vaatimista näkyvyydestä taivaalle (kuva 9). Tarkemittauksia voi suorittaa, jos voi olla varma laitteiston tarkkuudesta kyseisessä paikassa. Laitteistoihin voi asettaa tarkkuusrajan, jolloin ei voi ottaa toteumapisteitä. Useimmiten rajana käytetään viiden senttimetrin tarkkuutta. Koneohjausjärjestelmän toimintaa muuttuvissa olosuhteissa ja ympäristöissä tutkitaan työmailla. Pienikin puusto voi vaikuttaa mittauksien tarkkuuteen muutamia senttejä. Koneohjauksen mittauksen tarkkuutta ja luotettavuutta voidaan pyrkiä parantamaan huonoissa olosuhteissa laitteiston tarkkuuden tarkastamisella lähiympäristöön tehdyillä seurantapisteillä. Mikäli havaitaan ongelmia koneohjausjärjestelmän tarkkuudessa, merkitään muistiin paikka, jossa on ollut ongelmia mittausten tarkkuuden kanssa, jotta tuloksia voidaan analysoida paremmin.

23 17 Kuva 9. Työkohde, jossa koneohjausjärjestelmän tarkkuuteen ei voitu luottaa johtuen suuresta katveesta. 4.8 Aineiston käsittely Mittausaineistot kerätään kaikista työkoneista ja mittamiehen omista mittalaitteista ja käsitellään ja tarkistetaan 3D-Win-ohjelmalla. Kerätyistä tiedostoista eritellään eri rakennekerroksien tai rakenteiden pisteet omiksi aineistoikseen. Tätä helpottaa, jos pisteet on koodattu selkeästi ohjeistuksen mukaan. Oikein koodatut pisteet on helppo poimia 3D-
24 18 Win-ohjelmalla. Mikäli näin ei kuitenkaan ole, pisteet pitää käydä yksitellen läpi ja sijoitella oikeisiin tiedostoihin. Aineistoista poistetaan ensiksi selkeät karkeat virheet. Kun karkeat virheet on saatu poistettua aineistoista, voidaan aloittaa vertailu. Vertailu on helpoin suorittaa kirjoittamalla mittausaineistot ulos CSV-muotoon, jonka avulla pistetiedot voidaan avata suoraan Excel-taulukkolaskentaohjelmassa. Excelin avulla voidaan suorittaa erilaisia vertailuja ja laskukaavoja tarkkuuksien selvittämiseksi. Vertailuaineistosta tuotetaan erilaisia taulukoita, joista ilmenevät mittausten keskivirheet ja keskihajonnat eri rakenteissa. 5 Johtopäätökset 5.1 Koneohjauksella saavutettava todellinen tarkkuus Todellinen tarkkuus selvitettiin tekemällä vertailumittauksilla eri rakenteista kohdetyömailla. Vertailumittauksia suoritettiin yksittäisinä vertailupisteinä ja laajempina yhtenäisinä pintavertailuina. Yksittäisiä vertailupisteitä mitattiin eri rakenteista ja pinnoista kuten vesijohdoista, telesuojaputkista ja tien rakennekerroksista. Pintavertailuja suoritettiin tien rakennekerroksista ja kallioista. Yksittäisiä pistevertailuja suoritettiin eri rakenteista koko projektin ajan. Mittaukset toteutettiin pääasiassa merkkaamalla haluttu kohde maalirastilla, joka mitattiin takymetrillä ja koneohjausjärjestelmällä. Näin suoritettujen vertailumittausten tuloksena saatiin, että koneohjausjärjestelmän tarkkuus verrattuna takymetriin on korkeuden osalta keskimäärin 18 mm, x-koordinaatin kohdalla 41 mm ja y-koordinaatin kohdalla 44 mm. Korkeuden keskiarvo vastaa koneohjausjärjestelmiä markkinoivien yhtiöiden lupausta laitteiston tarkkuudesta. Pitää ottaa huomioon, että mittaustulosten joukossa on myös ei-optimiolosuhteissa mitattuja tuloksia, vaikka niiden vaikutus on vähäinen lopputulokseen, kyse on muutamista millimetreistä. X- ja y-koordinaattien suurehko poikkeama johtuu suoraan työkoneiden mittaustavasta eli pisteet mitataan kauhalla, joka on useimmiten pari metriä leveä. Kun mittapiste on keskellä kauhaa, kauhan keskipisteen arvioiminen on erittäin hankalaa. Siten 4 senttimetrin eroavuus tasokoordinaateissa on aivan inhimillinen.
25 19 Pintavertailut tehtiin mittaamalla esimerkiksi tien jakava rakennekerros koneohjausjärjestelmällä ja takymetrillä. Molemmilla mittaustekniikoilla saaduista pisteaineistoista tehtiin 3D-Win-ohjelmalla pintamallit. Pintamallien eroja vertailtiin Mallien yhdistäminen -toiminnon avulla. Tässä esimerkki vertailussa yhtenäistä pintaa oli noin 354 neliömetriä, ja tällä alueella mitattujen pintojen eroksi jäi 4,67 kuutiometriä. 345 neliömetrin alueella 4,67 kuutiometriä vastaa keskimäärin noin 13,2 mm:n eroavuutta pintojen välillä. Kallioista tehtyjen pintavertailujen erot olivat moninkertaiset verrattuna tasaisista pinnoista tehtyisiin vertailuihin. Tämä johtuu yksinkertaisesti siitä, että kallioiden pinnanmuodot ovat niin epäsäännöllisiä. Tulokset riippuvat aivan siitä, kuinka hyvin eri mittaustekniikoilla mitatut pisteverkot sattuvat sopimaan yhteen. Tämän työn yhteydessä mitattujen kallioiden pintojen keskimääräiseksi eroksi tuli noin 11 cm vajaan tuhannen neliömetrin alueella. 5.2 Koneohjauksella saavutettavan tarkkuuden riittävyys Koneohjauksella rakennetaan jo nykyisellään useita rakenteita joiden tarkkuusvaatimukset ovat alle 50 mm, mutta yli 10 mm. Tällaisia rakenteita ovat esimerkiksi teiden eri rakennekerrokset, vesihuoltojärjestelmät tai telesuojaputket. Näiden samojen rakenteiden laadunvarmistuksen voisi mielestäni tuottaa yhtä lailla koneohjauksella mitatuilla toteumapisteillä, koska tuskinpa koneohjausjärjestelmän tarkkuus merkittävästi huononee siinä välissä, kun työkone muotoilee pinnan haluttuun sijaintiin ja korkeuteen ja ottaa siitä toteumapisteen välittömästi tämän jälkeen. Koneohjauksen käytöstä ja sen tuomista hyödyistä rakennustyömailla on olemassa monia tutkielmia, jotka tukevat sen käyttämistä rakennusvaiheessa, joten en näy mitään syytä siihen, miksei sitä voisi vastaavasti käyttää myös laadunvarmistukseen. Luvussa 5.1 on käsitelty koneohjauksella saavutettua todellista tarkkuutta, mikä todentaa sen riittävyyden myös laadunvarmistukseen. 5.3 Koneohjauksella toteutetun mittauksen luotettavuus Koneohjauksella toteutetun mittauksen luotettavuus mittaustarkkuuden osalta on samaa tasoa kuin perinteisilläkin mittaustavoilla. Mittausten luotettavuutta voidaan parantaa
26 20 säännöllisellä koneohjausjärjestelmän tarkkuuden tarkistamisella, joko mittamiehen tai tarkistuspisteiden avulla. Koneohjauksen ainoa mahdollisesti epäluotettava komponentti on työkoneen kuljettaja ja hänen taitonsa ja ymmärryksensä tarkemittauksen suhteen. Senkin epätodennäköisyys on pieni, jos kuljettajat saavat selkeän ohjeistuksen tarkemittaukseen kuten liitteenä oleva Graniittirakennus Kallion oma Tarkemittausohje kuljettajille (liite 1). Siinä on selkeästi ohjeistettu, että tarkepisteet mitataan vasta kun tehty pinta tai rakenne on toleranssien sisällä. Kauklahden väylän työmaalla kokeiltiin yhden työkoneen paikannusjärjestelmän korjauslähteen vaihtamista työmaan oman tukiaseman korjaussignaalista yleiseen mobiiliverkonkorjaussignaaliin ja sen vaikutusta paikannustarkkuuteen. Työmaalla on oma tukiasema, josta työkoneet saavat paikannukseen korjauksen radioyhteyden avulla. Yksi työkoneista päätettiin poistaa työmaan tukiasemasta ja siirtää ottamaan datakorjausta SmartNet-tukiasemaverkosta. Smartnet on Leica Geosystemsin oma tukiasemaverkko, joka kattaa koko maan. SmartNet toimii 3G-puhelinverkossa, jonka avulla työkoneet saavat datakorjauksen paikannukseen. Muutamien tarkemitattujen pisteiden perusteella näiden kahden eri korjausdatan lähetysmenetelmän välillä ei havaittu merkittäviä eroavuuksia. Erot olivat keskimäärin 10 mm kaikilla koordinaattiakseleilla. Mittaukset suoritettiin hyvissä olosuhteissa, joten erojen pitäisikin olla pieniä. Jotta ongelmilta vältytään, on suositeltavaa käyttää kaikissa työmaalla toimivissa koneohjausjärjestelmissä samaa korjausdatan lähdettä. [17.] 6 Yhteenveto Koneohjauksella saavutetaan monia etuja niin mittausteknisiä kuin taloudellisiakin. Mittausteknisiin etuihin lukeutuu eri vaihtelevissa olosuhteissa työskentely. Takymetrillä ei voi mitata pimeässä tai rankassa vesisateessa, mutta koneohjaukseen nämä olosuhteet ei vaikuta mitenkään. Toinen suuri mittaustekninen etu on vedenalainen kaivaminen ja mittaaminen. Takymetrimittaus vaatii kattavan lähtöpisteverkon työmaalle toisin kuin koneohjausjärjestelmä, jolla voi työskennellä erittäin joustavasti ympäri työmaan. Taloudellinen suoraan näkyvä suuri etu on mittamiehen jatkuva juokseminen mittaamassa tarkkeita tehdystä rakenteista työkoneiden perässä. Samalla myös työkoneiden hyötysuhde paranee, kun niiden ei tarvitse odottaa mittamiehen saapumista paikalle ennen seuraavaan vaiheen aloittamista. [15, s. 31.]
27 21 Koneohjausjärjestelmien käyttäminen tehostaa ja helpottaa työmaiden laadunvalvontaa, kun työkoneilla saadaan suoraan käyttökelvollista dataa laatudokumentteja varten. Yleisien laatuvaatimuksien seuraamiseen tarvitaan paljon pisteaineistoa, joka on perinteisen mittamiehen työajalla lähes mahdotonta saavuttaa kattavasti. Työkoneiden tarkkuus tulee tarkistaa säännöllisesti työmaalla sovitun järjestelmän mukaisesti, jotta voidaan todentaa laatudokumenteissa työkoneiden tarkkuus mittaushetkillä. Myös tietojen siirtäminen työkoneesta mallintajalle nopeuttaa ja helpottaa kaikkien osapuolien työskentelyä ja mahdollistaa nopean reagoinnin virhetilanteissa. Mikäli koneohjausjärjestelmien kehitys jatkuu samanlaisena ja kuljettajien koulutukseen panostetaan entisestään, voidaan olettaa, että tulevaisuudessa työmaiden mittamiesten työnkuva muuttuu radikaalisti lähemmäs toimistotyöskentelyä kuin maastotyöskentelyä. Tällä hetkellä koneohjausjärjestelmät vaativat vielä mittaushenkilöstön läsnäoloa työmailla, koska työkoneet eivät vielä täytä kaikkein tarkimpien rakenteiden tarkkuusvaatimuksia.
28 22 Lähteet 1 Ahonen, Toni Tietomallipohjainen koneohjaus infratyömaalla. Insinöörityö. Metropolia Ammattikorkeakoulu. < 2 Pietarinen, Janne Laadunvarmistusmittaukset tietomallipohjaisessa väylärakentamisessa. Tutkielma. Verkkodokumentti. Aalto University Professional Development. < 3 Vermeer, Martin Johdanto Geodesiaan. Verkkodokumentti. Aalto-yliopisto. < 4 Eklöf, Oskar Tietomalleista koneohjaukseen. Insinöörityö. Metropolia Ammattikorkeakoulu. < 5 YIV Verkkodokumentti. InfraBIM. < Luettu Laakso, Markus Kaivinkoneen koneohjauksen hyödyntäminen talonrakennustyömailla. Opinnäytetyö. Tampereen Ammattikorkeakoulu. < 7 InfraRYL infrarakentamisen yleiset laatuvaatimukset. Verkkodokumentti. Rakennustietosäätiö RTS.< Luettu Helin, Toni Inframallipohjainen koneohjaus laadunvarmistuksen työkaluna. Opinnäytetyö. Saimaan Ammattikorkeakoulu. < 9 Laurila, Pasi Mittaus- ja kartoitustekniikan perusteet. Rovaniemen Ammattikorkeakoulu. 10 Leica PowerDigger 3D Verkkodokumentti. Scanlaser. < Luettu Nieminen, Juha-Matti Koneohjaus maanrakennustyössä. Opinnäytetyö. Saimaan Ammattikorkeakoulu. < 12 Pelkonen, Jari Koneohjausjärjestelmän käyttö ja hyödyntäminen maanrakennusyrityksessä. Insinöörityö. Metropolia Ammattikorkeakoulu. <
29 23 13 Piironen, Ville D-koneohjausjärjestelmä kaivinkoneissa. Opinnäytetyö. Tampereen Ammattikorkeakoulu. < 14 Laulainen, Ville-Veikko Tietomallikoordinaattorin tehtävät 3D-koneohjatulla infratyömaalla. Insinöörityö. Metropolia Ammattikorkeakoulu. < 15 Lillsund, Mika Kaivinkoneen koneohjauksen tehokkuuden mittaus. Insinöörityö. Metropolia Ammattikorkeakoulu. < 16 Huotari, Janne AIP-Mittaus Oy:n takymetrikaluston tarkastus. Insinöörityö. Metropolia Ammattikorkeakoulu. < 17 SmartNet palvelu Verkkodokumentti. Leica geosystems. < Luettu Kuvat 18 SmartNet peittoalue Verkkodokumentti. Leica geosystems. < Luettu Novatronin koneohjausjärjestelmän komponentit Verkkodokumentti. Novatron. < Luettu Icon Telematics etäseurantasovellus Verkkodokumentti. Leica geosystems. < Luettu Google Maps Verkkodokumentti. Google. < Luettu
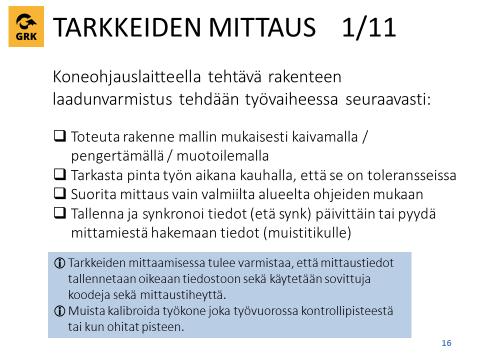

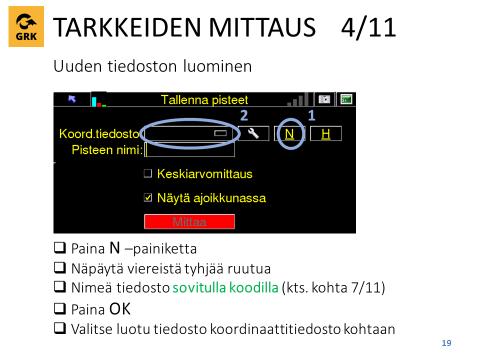
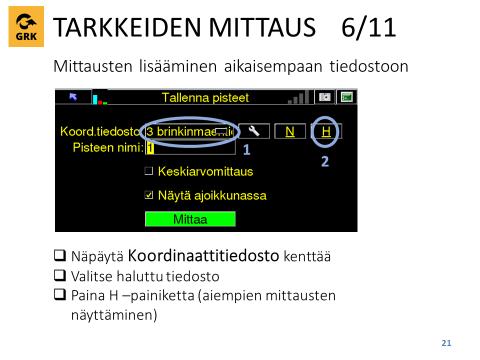
30 Liite 1 1 (6) Koneohjausjärjestelmien tarkemittausohje
")
31 Liite 1 2 (6)
")
32 Liite 1 3 (6)
")
33 Liite 1 4 (6)
34 Liite 1 5 (6)
35 Liite 1 6 (6)
36
PRE/InfraFINBIM tietomallivaatimukset ja ohjeet AP3 Suunnittelun ja rakentamisen uudet prosessit
 Built Environment Process Re-engineering PRE PRE/InfraFINBIM tietomallivaatimukset ja ohjeet AP3 Suunnittelun ja rakentamisen uudet prosessit 18.03.2014 Osa 12: Tietomallin hyödyntäminen infran rakentamisessa
Built Environment Process Re-engineering PRE PRE/InfraFINBIM tietomallivaatimukset ja ohjeet AP3 Suunnittelun ja rakentamisen uudet prosessit 18.03.2014 Osa 12: Tietomallin hyödyntäminen infran rakentamisessa
Geotrim TAMPEREEN SEUTUKUNNAN MITTAUSPÄIVÄT 29.3.2006
 Geotrim TAMPEREEN SEUTUKUNNAN MITTAUSPÄIVÄT 29.3.2006 Satelliittimittauksen tulevaisuus GPS:n modernisointi, L2C, L5 GALILEO GLONASS GNSS GPS:n modernisointi L2C uusi siviilikoodi L5 uusi taajuus Block
Geotrim TAMPEREEN SEUTUKUNNAN MITTAUSPÄIVÄT 29.3.2006 Satelliittimittauksen tulevaisuus GPS:n modernisointi, L2C, L5 GALILEO GLONASS GNSS GPS:n modernisointi L2C uusi siviilikoodi L5 uusi taajuus Block
Yleiset inframallivaatimukset YIV 2015
 Yleiset inframallivaatimukset YIV 2015 Osa 12: Inframallin hyödyntäminen suunnittelun eri vaiheissa ja rakentamisessa MAANRAKENTAMISEN MALLIPOHJAINEN LAADUNVARMISTUSMENETELMÄ GEOMETRISTEN MITTOJEN LAADUNVALVONTA
Yleiset inframallivaatimukset YIV 2015 Osa 12: Inframallin hyödyntäminen suunnittelun eri vaiheissa ja rakentamisessa MAANRAKENTAMISEN MALLIPOHJAINEN LAADUNVARMISTUSMENETELMÄ GEOMETRISTEN MITTOJEN LAADUNVALVONTA
Satelliittipaikannuksen perusteet
 Satelliittipaikannuksen perusteet 21.02.2018 Koulutuskeskus Sedu, Ilmajoki Satelliittipaikannus tarkoittaa vastaanottimen sijainninmääritystä satelliittijärjestelmien lähettämien radiosignaalien perusteella.
Satelliittipaikannuksen perusteet 21.02.2018 Koulutuskeskus Sedu, Ilmajoki Satelliittipaikannus tarkoittaa vastaanottimen sijainninmääritystä satelliittijärjestelmien lähettämien radiosignaalien perusteella.
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta
 Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
TUOTE(tieto)MALLIT Espoon pilottikohteiden urakoiden hankintaprosessi. Harri Tanska, Espoon kaupunki 5.2.2013 Infra FIMBIM Pilottipäivä
MALLIT Espoon pilottikohteiden urakoiden hankintaprosessi. Harri Tanska, Espoon kaupunki 5.2.2013 Infra FIMBIM Pilottipäivä") TUOTE(tieto)MALLIT Espoon pilottikohteiden urakoiden hankintaprosessi Harri Tanska, Espoon kaupunki 5.2.2013 Infra FIMBIM Pilottipäivä Miten tuotemallisuunnittelu eroaa perinteisestä suunnittelusta? Käytännössä
TUOTE(tieto)MALLIT Espoon pilottikohteiden urakoiden hankintaprosessi Harri Tanska, Espoon kaupunki 5.2.2013 Infra FIMBIM Pilottipäivä Miten tuotemallisuunnittelu eroaa perinteisestä suunnittelusta? Käytännössä
TTY Mittausten koekenttä. Käyttö. Sijainti
 TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
Metsäkoneiden sensoritekniikka kehittyy. Heikki Hyyti, Aalto-yliopisto
 Metsäkoneiden sensoritekniikka kehittyy, Metsäkoneiden sensoritekniikka kehittyy Miksi uutta sensoritekniikkaa? Tarkka paikkatieto metsässä Metsäkoneen ja puomin asennon mittaus Konenäkö Laserkeilaus Tietolähteiden
Metsäkoneiden sensoritekniikka kehittyy, Metsäkoneiden sensoritekniikka kehittyy Miksi uutta sensoritekniikkaa? Tarkka paikkatieto metsässä Metsäkoneen ja puomin asennon mittaus Konenäkö Laserkeilaus Tietolähteiden
Mallipohjaisen rakennustyömaan mittausohje
 Mallipohjaisen rakennustyömaan mittausohje 1 Sisällysluettelo 1. Johdanto 3 2. Perehdyttäminen 3 3. Mittausmenetelmät 5 2.1. Tukiaseman tarkastus 5 2.2. Työkoneen tarkastus 7 2.2.1. Takymetri, GNSS -mittaus
Mallipohjaisen rakennustyömaan mittausohje 1 Sisällysluettelo 1. Johdanto 3 2. Perehdyttäminen 3 3. Mittausmenetelmät 5 2.1. Tukiaseman tarkastus 5 2.2. Työkoneen tarkastus 7 2.2.1. Takymetri, GNSS -mittaus
Satelliittipaikannuksen tarkkuus hakkuukoneessa. Timo Melkas Mika Salmi Jarmo Hämäläinen
 Satelliittipaikannuksen tarkkuus hakkuukoneessa Timo Melkas Mika Salmi Jarmo Hämäläinen Tavoite Tutkimuksen tavoite oli selvittää nykyisten hakkuukoneissa vakiovarusteena olevien satelliittivastaanottimien
Satelliittipaikannuksen tarkkuus hakkuukoneessa Timo Melkas Mika Salmi Jarmo Hämäläinen Tavoite Tutkimuksen tavoite oli selvittää nykyisten hakkuukoneissa vakiovarusteena olevien satelliittivastaanottimien
Satelliittipaikannuksen perusteet
 Satelliittipaikannuksen perusteet Satelliittipaikannus tarkoittaa vastaanottimen sijainninmääritystä satelliittijärjestelmien lähettämien radiosignaalien perusteella. (public domain, http://www.gps.gov/multimedia/images/constellation.gif
Satelliittipaikannuksen perusteet Satelliittipaikannus tarkoittaa vastaanottimen sijainninmääritystä satelliittijärjestelmien lähettämien radiosignaalien perusteella. (public domain, http://www.gps.gov/multimedia/images/constellation.gif
Lataa Mittaus- ja kartoitustekniikan perusteet - Pasi Laurila. Lataa
 Lataa Mittaus- ja kartoitustekniikan perusteet - Pasi Laurila Lataa Kirjailija: Pasi Laurila ISBN: 9789525923421 Sivumäärä: 407 Formaatti: PDF Tiedoston koko: 32.46 Mb Mittaus- ja kartoitustekniikan perusteet
Lataa Mittaus- ja kartoitustekniikan perusteet - Pasi Laurila Lataa Kirjailija: Pasi Laurila ISBN: 9789525923421 Sivumäärä: 407 Formaatti: PDF Tiedoston koko: 32.46 Mb Mittaus- ja kartoitustekniikan perusteet
Työkoneohjauksen perusteet
 Työkoneohjauksen perusteet TIETOMALLIRAKENTAMINEN NOVATRON - TUOTTEILLA Petteri Palviainen Petteri 19.4.2016 13.6.2016 Palviainen Infrarakentamisen työkoneautomaatio Työkoneet varustetaan koneohjausjärjestelmillä
Työkoneohjauksen perusteet TIETOMALLIRAKENTAMINEN NOVATRON - TUOTTEILLA Petteri Palviainen Petteri 19.4.2016 13.6.2016 Palviainen Infrarakentamisen työkoneautomaatio Työkoneet varustetaan koneohjausjärjestelmillä
LIITE 1 VIRHEEN ARVIOINNISTA
 1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
Koneohjaus ja 3D-mallit maarakennustyömaalla. Teppo Rauhala, WSP Finland Oy
 Koneohjaus ja 3D-mallit maarakennustyömaalla Teppo Rauhala, WSP Finland Oy 1.4.2016 Miksi BIM? Kustannuksien aleneminen Teknisen laadun paraneminen Rakentamisaikataulun lyheneminen Älykästä tiedonhallintaa
Koneohjaus ja 3D-mallit maarakennustyömaalla Teppo Rauhala, WSP Finland Oy 1.4.2016 Miksi BIM? Kustannuksien aleneminen Teknisen laadun paraneminen Rakentamisaikataulun lyheneminen Älykästä tiedonhallintaa
LIITE 1 VIRHEEN ARVIOINNISTA
 1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
DIGIBONUSTEHTÄVÄ: MPKJ NCC INDUSTRY OY LOPPURAPORTTI
 DIGIBONUSTEHTÄVÄ: MPKJ NCC INDUSTRY OY LOPPURAPORTTI Tekijä: Marko Olli 16.10.2018 Sisällys 1 Johdanto...3 2 Hankkeen tavoitteet ja vaikuttavuus...3 3 Laitteisto ja mittaustarkkuus...3 4 Pilotointi ja
DIGIBONUSTEHTÄVÄ: MPKJ NCC INDUSTRY OY LOPPURAPORTTI Tekijä: Marko Olli 16.10.2018 Sisällys 1 Johdanto...3 2 Hankkeen tavoitteet ja vaikuttavuus...3 3 Laitteisto ja mittaustarkkuus...3 4 Pilotointi ja
Maanmittauspäivät 2014 Seinäjoki
 Maanmittauspäivät 2014 Seinäjoki Parempaa tarkkuutta satelliittimittauksille EUREF/N2000 - järjestelmissä Ympäristösi parhaat tekijät 2 EUREF koordinaattijärjestelmän käyttöön otto on Suomessa sujunut
Maanmittauspäivät 2014 Seinäjoki Parempaa tarkkuutta satelliittimittauksille EUREF/N2000 - järjestelmissä Ympäristösi parhaat tekijät 2 EUREF koordinaattijärjestelmän käyttöön otto on Suomessa sujunut
Mittaustekniikka (3 op)
") 530143 (3 op) Yleistä Luennoitsija: Ilkka Lassila Ilkka.lassila@helsinki.fi, huone C319 Assistentti: Ville Kananen Ville.kananen@helsinki.fi Luennot: ti 9-10, pe 12-14 sali E207 30.10.-14.12.2006 (21 tuntia)
530143 (3 op) Yleistä Luennoitsija: Ilkka Lassila Ilkka.lassila@helsinki.fi, huone C319 Assistentti: Ville Kananen Ville.kananen@helsinki.fi Luennot: ti 9-10, pe 12-14 sali E207 30.10.-14.12.2006 (21 tuntia)
LIITE 1 VIRHEEN ARVIOINNISTA
 Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Satelliittipaikannus
 Kolme maailmalaajuista järjestelmää 1. GPS (USAn puolustusministeriö) Täydessä laajuudessaan toiminnassa v. 1994. http://www.navcen.uscg.gov/gps/default.htm 2. GLONASS (Venäjän hallitus) Ilmeisesti 11
Kolme maailmalaajuista järjestelmää 1. GPS (USAn puolustusministeriö) Täydessä laajuudessaan toiminnassa v. 1994. http://www.navcen.uscg.gov/gps/default.htm 2. GLONASS (Venäjän hallitus) Ilmeisesti 11
1) Maan muodon selvittäminen. 2) Leveys- ja pituuspiirit. 3) Mittaaminen
 Maan muodon selvittäminen. 2) Leveys- ja pituuspiirit. 3) Mittaaminen") 1) Maan muodon selvittäminen Nykyään on helppo sanoa, että maa on pallon muotoinen olet todennäköisesti itsekin nähnyt kuvia maasta avaruudesta kuvattuna. Mutta onko maapallomme täydellinen pallo? Tutki
1) Maan muodon selvittäminen Nykyään on helppo sanoa, että maa on pallon muotoinen olet todennäköisesti itsekin nähnyt kuvia maasta avaruudesta kuvattuna. Mutta onko maapallomme täydellinen pallo? Tutki
Markku.Poutanen@fgi.fi
 Global Navigation Satellite Systems GNSS Markku.Poutanen@fgi.fi Kirjallisuutta Poutanen: GPS paikanmääritys, Ursa HUOM: osin vanhentunut, ajantasaistukseen luennolla ilmoitettava materiaali (erit. suomalaiset
Global Navigation Satellite Systems GNSS Markku.Poutanen@fgi.fi Kirjallisuutta Poutanen: GPS paikanmääritys, Ursa HUOM: osin vanhentunut, ajantasaistukseen luennolla ilmoitettava materiaali (erit. suomalaiset
Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen
 Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen Mittausten laadun tarkastus ja muunnoskertoimien laskenta Kyösti Laamanen 2.0 4.10.2013 Prosito 1 (9) SISÄLTÖ 1 YLEISTÄ...
Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen Mittausten laadun tarkastus ja muunnoskertoimien laskenta Kyösti Laamanen 2.0 4.10.2013 Prosito 1 (9) SISÄLTÖ 1 YLEISTÄ...
Inframallivaatimukset
 Inframallivaatimukset Kuva: KP24.fi / Clas Olav Slotte BIM:n perusteet 4 Proxion Jatkuvaa 3D-mallipohjaista suunnittelua Eri suunnitteluvaiheissa hyödynnetään (kehitetään) mallia Malli pitää tehdä suunnitteluvaiheessa,
Inframallivaatimukset Kuva: KP24.fi / Clas Olav Slotte BIM:n perusteet 4 Proxion Jatkuvaa 3D-mallipohjaista suunnittelua Eri suunnitteluvaiheissa hyödynnetään (kehitetään) mallia Malli pitää tehdä suunnitteluvaiheessa,
Jos ohjeessa on jotain epäselvää, on otettava yhteys Mänttä-Vilppulan kaupungin kiinteistö- ja mittauspalveluihin.
 Kartoitusohje Johdanto Tämä ohje määrittää Mänttä-Vilppulan kaupungille tehtävien kaapelien ja putkien kartoitustyön vaatimukset sekä antaa ohjeet kartoitustyön suorittamiseen. Ohjeessa määritellään kartoituksen
Kartoitusohje Johdanto Tämä ohje määrittää Mänttä-Vilppulan kaupungille tehtävien kaapelien ja putkien kartoitustyön vaatimukset sekä antaa ohjeet kartoitustyön suorittamiseen. Ohjeessa määritellään kartoituksen
Digitalisaatio infra-alalla
 Digitalisaatio infra-alalla Pasi Nurminen Destia palveluita suunnittelusta kunnossapitoon Mallipohjainen rakentaminen Tietomalli Tuotteen/rakennelman esittäminen digitaalisessa muodossa, kolmiulotteisesti,
Digitalisaatio infra-alalla Pasi Nurminen Destia palveluita suunnittelusta kunnossapitoon Mallipohjainen rakentaminen Tietomalli Tuotteen/rakennelman esittäminen digitaalisessa muodossa, kolmiulotteisesti,
VT8 Sepänkylän ohitustie - väliraportointia (VT8-BIM)!
!") RYM PRE InfraFINBIM, Pilottipäivä nro 6, 5.2.2013 VTT, Vuorimiehentie 3, Espoo VT8 Sepänkylän ohitustie - väliraportointia (VT8-BIM)! Rauno Heikkilä, Oulun yliopisto! Tausta! Tutkimus- ja pilottikohteena
RYM PRE InfraFINBIM, Pilottipäivä nro 6, 5.2.2013 VTT, Vuorimiehentie 3, Espoo VT8 Sepänkylän ohitustie - väliraportointia (VT8-BIM)! Rauno Heikkilä, Oulun yliopisto! Tausta! Tutkimus- ja pilottikohteena
Mobiilikartoitusdatan prosessointi ja hyödyntäminen
 Mobiilikartoitusdatan prosessointi ja hyödyntäminen Alkuprosessointi - Vaiheet 1. Ajoradan jälkilaskenta 2. Havaintodatan korjaus 3. RGB-värjäys 4. Tukipisteiden käyttö Ajoradan jälkilaskenta Korjataan
Mobiilikartoitusdatan prosessointi ja hyödyntäminen Alkuprosessointi - Vaiheet 1. Ajoradan jälkilaskenta 2. Havaintodatan korjaus 3. RGB-värjäys 4. Tukipisteiden käyttö Ajoradan jälkilaskenta Korjataan
BIM Suunnittelun ja rakentamisen uusiutuvat toimintatavat Teppo Rauhala
 BIM Suunnittelun ja rakentamisen uusiutuvat toimintatavat Teppo Rauhala Proxion 19.10.2015 Proxion BIM historiikkia Kehitystyö lähtenyt rakentamisen tarpeista Työkoneautomaatio alkoi yleistymään 2000 luvulla
BIM Suunnittelun ja rakentamisen uusiutuvat toimintatavat Teppo Rauhala Proxion 19.10.2015 Proxion BIM historiikkia Kehitystyö lähtenyt rakentamisen tarpeista Työkoneautomaatio alkoi yleistymään 2000 luvulla
Mallipohjainen radanrakentamisen automaatio
 Mallipohjainen radanrakentamisen automaatio Infra FINBIM Pilottipäivät 24.10.2013 Jussi Heikkilä Mallipohjainen radanrakentamisen automaatio Pilotin kesto: huhtikuu/2012 lokakuu/2012 Diplomityö Tietomallipohjaisen
Mallipohjainen radanrakentamisen automaatio Infra FINBIM Pilottipäivät 24.10.2013 Jussi Heikkilä Mallipohjainen radanrakentamisen automaatio Pilotin kesto: huhtikuu/2012 lokakuu/2012 Diplomityö Tietomallipohjaisen
Welcome to the World of Machine Control
 Welcome to the World of Machine Control 3D-koneohjauksen hyödyntäminen paalutustyömaalla Vesa-Matti Tanhuanpää Scanlaser Oy Hexagon on globaali toimija, jolla on vahva markkinaosuus mittausteknologioiden
Welcome to the World of Machine Control 3D-koneohjauksen hyödyntäminen paalutustyömaalla Vesa-Matti Tanhuanpää Scanlaser Oy Hexagon on globaali toimija, jolla on vahva markkinaosuus mittausteknologioiden
Vanhan Kirkkotien ja siihen liittyvien katujen koneohjattu urakka. When Infrastructure Counts
 Vanhan Kirkkotien ja siihen liittyvien katujen koneohjattu urakka When Infrastructure Counts Espoon teknisen keskuksen tietomalli/koneohjauspilotit 2 Suunnittelukohteet ovat Infra FINBIM-hankkeen pilottikohteita,
Vanhan Kirkkotien ja siihen liittyvien katujen koneohjattu urakka When Infrastructure Counts Espoon teknisen keskuksen tietomalli/koneohjauspilotit 2 Suunnittelukohteet ovat Infra FINBIM-hankkeen pilottikohteita,
KONEOHJAUSTUKIASEMAN PERUSTAMINEN
 KONEOHJAUSTUKIASEMAN PERUSTAMINEN Jussi Karjalainen Opinnäytetyö Tekniikan ja liikenteen ala Maanmittaustekniikan koulutusohjelma Insinööri (AMK) 2016 Opinnäytetyön tiivistelmä Tekniikan ja liikenteen
KONEOHJAUSTUKIASEMAN PERUSTAMINEN Jussi Karjalainen Opinnäytetyö Tekniikan ja liikenteen ala Maanmittaustekniikan koulutusohjelma Insinööri (AMK) 2016 Opinnäytetyön tiivistelmä Tekniikan ja liikenteen
Tietomallinnuksen konkretisointi VR Track Oy:ssä. INFRA13 Pasi Kråknäs 5.3.2013
 Tietomallinnuksen konkretisointi VR Track Oy:ssä INFRA13 Pasi Kråknäs 5.3.2013 Aloitimme runsaat 150 vuotta sitten Helsinki Hämeenlinna-rataosuuden rakentaminen aloitettiin 1858 Ensimmäinen säännöllinen
Tietomallinnuksen konkretisointi VR Track Oy:ssä INFRA13 Pasi Kråknäs 5.3.2013 Aloitimme runsaat 150 vuotta sitten Helsinki Hämeenlinna-rataosuuden rakentaminen aloitettiin 1858 Ensimmäinen säännöllinen
Vt8 Sepänkyläntie. FINBIM-pilottipäivä 3.10.2012 Kyösti Ratia, Skanska Infra Oy
 Vt8 Sepänkyläntie FINBIM-pilottipäivä 3.10.2012 Kyösti Ratia, Skanska Infra Oy Aiheet Pilottiympäristö Painopisteet Norjan matkan anti Pelisäännöt Mittausaineisto Laadunvarmistus Johtopäätökset Kyösti
Vt8 Sepänkyläntie FINBIM-pilottipäivä 3.10.2012 Kyösti Ratia, Skanska Infra Oy Aiheet Pilottiympäristö Painopisteet Norjan matkan anti Pelisäännöt Mittausaineisto Laadunvarmistus Johtopäätökset Kyösti
Radiotekniikan sovelluksia
 Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
Virhearviointi. Fysiikassa on tärkeää tietää tulosten tarkkuus.
 Virhearviointi Fysiikassa on tärkeää tietää tulosten tarkkuus. Virhelajit A. Tilastolliset virheet= satunnaisvirheet, joita voi arvioida tilastollisin menetelmin B. Systemaattiset virheet = virheet, joita
Virhearviointi Fysiikassa on tärkeää tietää tulosten tarkkuus. Virhelajit A. Tilastolliset virheet= satunnaisvirheet, joita voi arvioida tilastollisin menetelmin B. Systemaattiset virheet = virheet, joita
5 syytä hyödyntää ensiluokkaista paikannustarkkuutta maastotyöskentelyssä
 5 syytä hyödyntää ensiluokkaista paikannustarkkuutta maastotyöskentelyssä Taskukokoinen, maastokelpoinen Trimble R1 GNSS -vastaanotin mahdollistaa ammattitasoisen paikkatiedonkeruun. Kun R1 yhdistetään
5 syytä hyödyntää ensiluokkaista paikannustarkkuutta maastotyöskentelyssä Taskukokoinen, maastokelpoinen Trimble R1 GNSS -vastaanotin mahdollistaa ammattitasoisen paikkatiedonkeruun. Kun R1 yhdistetään
Mittajärjestelmät ja mittasuositukset.
 Mittajärjestelmät ja mittasuositukset. Hannu Hirsi Johdanto: Mittajärjestelmien tarkoitus: Helpottaa eri toimijoiden järjestelmien ja osien yhteensovittamista : suunnittelua, valmistusta, asentamista,
Mittajärjestelmät ja mittasuositukset. Hannu Hirsi Johdanto: Mittajärjestelmien tarkoitus: Helpottaa eri toimijoiden järjestelmien ja osien yhteensovittamista : suunnittelua, valmistusta, asentamista,
Built Environment Process Reengineering (PRE)
") RAKENNETTU YMPÄRISTÖ Tarvitaanko tätä palkkia? Built Environment Process Reengineering (PRE) Prosessimuutos kohti laajamittaista tietomallintamisen hyödyntämistä Tiina Perttula Built Environment Process
RAKENNETTU YMPÄRISTÖ Tarvitaanko tätä palkkia? Built Environment Process Reengineering (PRE) Prosessimuutos kohti laajamittaista tietomallintamisen hyödyntämistä Tiina Perttula Built Environment Process
Uudet väylät: tuotannon vaatimat toteutusmallit ja mallipohjainen laadunvarmistus
 Firstname Lastname RAKENNETTU YMPÄRISTÖ Tarvitaanko tätä palkkia? Uudet väylät: tuotannon vaatimat toteutusmallit ja mallipohjainen laadunvarmistus Pasi Nurminen, Destia Oy Built Environment Process Innovations
Firstname Lastname RAKENNETTU YMPÄRISTÖ Tarvitaanko tätä palkkia? Uudet väylät: tuotannon vaatimat toteutusmallit ja mallipohjainen laadunvarmistus Pasi Nurminen, Destia Oy Built Environment Process Innovations
Mitä kalibrointitodistus kertoo?
 Mitä kalibrointitodistus kertoo? Luotettavuutta päästökauppaan liittyviin mittauksiin MIKES 21.9.2006 Martti Heinonen Tavoite Laitteen kalibroinnista hyödytään vain jos sen tuloksia käytetään hyväksi.
Mitä kalibrointitodistus kertoo? Luotettavuutta päästökauppaan liittyviin mittauksiin MIKES 21.9.2006 Martti Heinonen Tavoite Laitteen kalibroinnista hyödytään vain jos sen tuloksia käytetään hyväksi.
3D-KONEOHJAUKSEN KÄYTTÖÖNOTTO JYVÄSKYLÄN KAUPUNGILLA
 OPINNÄYTETYÖ - AMMATTIKORKEAKOULUTUTKINTO TEKNIIKAN JA LIIKENTEEN ALA 3D-KONEOHJAUKSEN KÄYTTÖÖNOTTO JYVÄSKYLÄN KAUPUNGILLA T E K I J Ä : Matti Hannuksela SAVONIA-AMMATTIKORKEAKOULU OPINNÄYTETYÖ Tiivistelmä
OPINNÄYTETYÖ - AMMATTIKORKEAKOULUTUTKINTO TEKNIIKAN JA LIIKENTEEN ALA 3D-KONEOHJAUKSEN KÄYTTÖÖNOTTO JYVÄSKYLÄN KAUPUNGILLA T E K I J Ä : Matti Hannuksela SAVONIA-AMMATTIKORKEAKOULU OPINNÄYTETYÖ Tiivistelmä
Työn tavoitteita. 1 Teoriaa
 FYSP103 / K3 BRAGGIN DIFFRAKTIO Työn tavoitteita havainnollistaa röntgendiffraktion periaatetta konkreettisen laitteiston avulla ja kerrata luennoilla läpikäytyä teoriatietoa Röntgendiffraktio on tärkeä
FYSP103 / K3 BRAGGIN DIFFRAKTIO Työn tavoitteita havainnollistaa röntgendiffraktion periaatetta konkreettisen laitteiston avulla ja kerrata luennoilla läpikäytyä teoriatietoa Röntgendiffraktio on tärkeä
Graniittirakennus Kallio Oy -2013
 Graniittirakennus Kallio Oy -2013 Perustettu 1983, perustajina/omistajina Armas Kallio perheineen 2007 Urakointitoiminnan aloittaminen pääkaupunkiseudulla 2010 Omistusjärjestely yrityksen omistuksen siirtyminen
Graniittirakennus Kallio Oy -2013 Perustettu 1983, perustajina/omistajina Armas Kallio perheineen 2007 Urakointitoiminnan aloittaminen pääkaupunkiseudulla 2010 Omistusjärjestely yrityksen omistuksen siirtyminen
Koneohjausjärjestelmät Koulutuspalvelut Pilvipalvelut Työnjohdon työkalut Tuki- ja huoltopalvelut
 Koneohjausjärjestelmät Koulutuspalvelut Pilvipalvelut Työnjohdon työkalut Tuki- ja huoltopalvelut Xsite PRO 3D käytössä VT 4 parannustöissä JÄRJESTELMÄT JA KOULUTUKSET DIGITAALISEEN INFRARAKENTAMISEEN
Koneohjausjärjestelmät Koulutuspalvelut Pilvipalvelut Työnjohdon työkalut Tuki- ja huoltopalvelut Xsite PRO 3D käytössä VT 4 parannustöissä JÄRJESTELMÄT JA KOULUTUKSET DIGITAALISEEN INFRARAKENTAMISEEN
Ilkka Grönberg 3D-KONEOHJAUKSEN HYÖDYT
 Ilkka Grönberg 3D-KONEOHJAUKSEN HYÖDYT 3D-KONEOHJAUKSEN HYÖDYT Ilkka Grönberg Opinnäytetyö Lukukausi kevät 2018 Rakennustekniikan koulutusohjelma Oulun ammattikorkeakoulu TIIVISTELMÄ Oulun ammattikorkeakoulu
Ilkka Grönberg 3D-KONEOHJAUKSEN HYÖDYT 3D-KONEOHJAUKSEN HYÖDYT Ilkka Grönberg Opinnäytetyö Lukukausi kevät 2018 Rakennustekniikan koulutusohjelma Oulun ammattikorkeakoulu TIIVISTELMÄ Oulun ammattikorkeakoulu
KONEOHJAUSJÄRJESTELMIEN JA MITTALAITTEIDEN KÄYTTÖÖNOTTO NCC SUOMI OY
 Ville Kola KONEOHJAUSJÄRJESTELMIEN JA MITTALAITTEIDEN KÄYTTÖÖNOTTO NCC SUOMI OY Opinnäytetyö Rakennustekniikka 2018 Tekijä/Tekijät Tutkinto Aika Ville Kola Insinööri (AMK) Kesäkuu 2018 Opinnäytetyön nimi
Ville Kola KONEOHJAUSJÄRJESTELMIEN JA MITTALAITTEIDEN KÄYTTÖÖNOTTO NCC SUOMI OY Opinnäytetyö Rakennustekniikka 2018 Tekijä/Tekijät Tutkinto Aika Ville Kola Insinööri (AMK) Kesäkuu 2018 Opinnäytetyön nimi
Mallipohjainen laadunvalvonta case Kokkola Ylivieska. Teppo Rauhala
 Mallipohjainen laadunvalvonta case Kokkola Ylivieska Teppo Rauhala Kuva: KP24.fi / Clas Olav Slotte Tavoite Tavoitteita BIM:n hyödyntämisessä tulisi olla: 1. Kustannuksien aleneminen 2. Teknisen laadun
Mallipohjainen laadunvalvonta case Kokkola Ylivieska Teppo Rauhala Kuva: KP24.fi / Clas Olav Slotte Tavoite Tavoitteita BIM:n hyödyntämisessä tulisi olla: 1. Kustannuksien aleneminen 2. Teknisen laadun
Mikä on digitaalinen suunnitelma. Petri Niemi Finnmap Infra Oy
 Mikä on digitaalinen suunnitelma Petri Niemi Finnmap Infra Oy Taustaa Julkaistu 25.2.2016 23.8.2016 DIGITAALISTEN PÄÄLLYSTEURAKOIDEN TYÖPAJA 2 Digitaalinen päällystyssuunnitelma 23.8.2016 DIGITAALISTEN
Mikä on digitaalinen suunnitelma Petri Niemi Finnmap Infra Oy Taustaa Julkaistu 25.2.2016 23.8.2016 DIGITAALISTEN PÄÄLLYSTEURAKOIDEN TYÖPAJA 2 Digitaalinen päällystyssuunnitelma 23.8.2016 DIGITAALISTEN
UAV:n avulla tuotetun fotogrametrsine pistepilven hyödyntäminen infrahankkeen suunnittelussa ja rakentamisessa Olli Sihvola, työpäällikkö, SRV
 UAV:n avulla tuotetun fotogrametrsine pistepilven hyödyntäminen infrahankkeen suunnittelussa ja rakentamisessa Olli Sihvola, työpäällikkö, SRV 1 2018-11-09 Gendiatur, que reiunt explabo. Ut asinctiis de
UAV:n avulla tuotetun fotogrametrsine pistepilven hyödyntäminen infrahankkeen suunnittelussa ja rakentamisessa Olli Sihvola, työpäällikkö, SRV 1 2018-11-09 Gendiatur, que reiunt explabo. Ut asinctiis de
Kelluvien turvalaitteiden. asennus- ja mittausohje
 Kelluvien turvalaitteiden asennus- ja mittausohje 2009 Versio 0.4 Sivu 1 (9) 14.9.2009 Ohjeen infosivu: Kelluvien turvalaitteiden asennus- ja mittausohje Versio: 0.3 / 28.8.2009 laatinut IK Status: Yleisohje
Kelluvien turvalaitteiden asennus- ja mittausohje 2009 Versio 0.4 Sivu 1 (9) 14.9.2009 Ohjeen infosivu: Kelluvien turvalaitteiden asennus- ja mittausohje Versio: 0.3 / 28.8.2009 laatinut IK Status: Yleisohje
Matematiikka ja teknologia, kevät 2011
 Matematiikka ja teknologia, kevät 2011 Peter Hästö 13. tammikuuta 2011 Matemaattisten tieteiden laitos Tarkoitus Kurssin tarkoituksena on tutustuttaa ja käydä läpi eräisiin teknologisiin sovelluksiin liittyvää
Matematiikka ja teknologia, kevät 2011 Peter Hästö 13. tammikuuta 2011 Matemaattisten tieteiden laitos Tarkoitus Kurssin tarkoituksena on tutustuttaa ja käydä läpi eräisiin teknologisiin sovelluksiin liittyvää
JHS-suositus(luonnos): Kiintopistemittaus EUREF-FIN koordinaattijärjestelmässä
: Kiintopistemittaus EUREF-FIN koordinaattijärjestelmässä") JHS-suositus(luonnos): Kiintopistemittaus EUREF-FIN koordinaattijärjestelmässä EUREF-II -päivä 2012 Marko Ollikainen Kehittämiskeskus Maanmittauslaitos MAANMITTAUSLAITOS TIETOA MAASTA Mittausohjeiden uudistamisesta
JHS-suositus(luonnos): Kiintopistemittaus EUREF-FIN koordinaattijärjestelmässä EUREF-II -päivä 2012 Marko Ollikainen Kehittämiskeskus Maanmittauslaitos MAANMITTAUSLAITOS TIETOA MAASTA Mittausohjeiden uudistamisesta
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää
 Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
MACHINERY on laadunvarmistaja
 MACHINERY on laadunvarmistaja Mitä tapahtuu huomenna? entä jos omaisuudelle tapahtuu jotain? entä jos kalustolle tapahtuu jotain? entä jos sinulle tapahtuu jotain? MACHINERY ennakoi, ennaltaehkäisee ja
MACHINERY on laadunvarmistaja Mitä tapahtuu huomenna? entä jos omaisuudelle tapahtuu jotain? entä jos kalustolle tapahtuu jotain? entä jos sinulle tapahtuu jotain? MACHINERY ennakoi, ennaltaehkäisee ja
Leica Sprinter Siitä vain... Paina nappia
 Sprinter Siitä vain... Paina nappia Sprinter 50 Tähtää, paina nappia, lue tulos Pölyn ja veden kestävä Kompakti ja kevyt muotoilu Virheettömät korkeuden ja etäisyyden lukemat Toiminnot yhdellä painikkeella
Sprinter Siitä vain... Paina nappia Sprinter 50 Tähtää, paina nappia, lue tulos Pölyn ja veden kestävä Kompakti ja kevyt muotoilu Virheettömät korkeuden ja etäisyyden lukemat Toiminnot yhdellä painikkeella
Korkeusjärjestelmän muutos ja niiden sijoittuminen tulevaisuuteen
 Rakennusvalvontamittaus 15.02.2010-> Korkeusjärjestelmän muutos ja niiden sijoittuminen tulevaisuuteen Ongelmat suurimmillaan parin vuoden kuluttua, kun maastossa on yhtä paljon uuden korkeusjärjestelmän
Rakennusvalvontamittaus 15.02.2010-> Korkeusjärjestelmän muutos ja niiden sijoittuminen tulevaisuuteen Ongelmat suurimmillaan parin vuoden kuluttua, kun maastossa on yhtä paljon uuden korkeusjärjestelmän
GNSS- JA TAKYMETRIMITTAUKSEN MITTAUSTARK- KUUSVERTAILU KAUPUNKIOLOSUHTEISSA
 GNSS- JA TAKYMETRIMITTAUKSEN MITTAUSTARK- KUUSVERTAILU KAUPUNKIOLOSUHTEISSA Koponen Jukka Hiltunen Jani Opinnäytetyö Tekniikan ja liikenteen ala Maanmittaustekniikan ko. Insinööri (AMK) 2016 Opinnäytetyön
GNSS- JA TAKYMETRIMITTAUKSEN MITTAUSTARK- KUUSVERTAILU KAUPUNKIOLOSUHTEISSA Koponen Jukka Hiltunen Jani Opinnäytetyö Tekniikan ja liikenteen ala Maanmittaustekniikan ko. Insinööri (AMK) 2016 Opinnäytetyön
Metaanimittaukset Ämmässuon kaatopaikalla 2018
 Metaanimittaukset Ämmässuon kaatopaikalla 2018 Helsingin seudun ympäristöpalvelut -kuntayhtymä Samkommunen Helsingforsregionens miljötjänster Helsinki Region Environmental Services Authority Helsingin
Metaanimittaukset Ämmässuon kaatopaikalla 2018 Helsingin seudun ympäristöpalvelut -kuntayhtymä Samkommunen Helsingforsregionens miljötjänster Helsinki Region Environmental Services Authority Helsingin
Katsaus VRS-teknologian nykytilaan ja tulevaisuuteen
 Seppo Tötterström Katsaus VRS-teknologian nykytilaan ja tulevaisuuteen VRS-teknologia on jo vakiintunut viime vuosina päämenetelmäksi tarkoissa GPS/GNSS-mittaussovelluksissa niin Suomessa, Euroopassa kuin
Seppo Tötterström Katsaus VRS-teknologian nykytilaan ja tulevaisuuteen VRS-teknologia on jo vakiintunut viime vuosina päämenetelmäksi tarkoissa GPS/GNSS-mittaussovelluksissa niin Suomessa, Euroopassa kuin
761121P-01 FYSIIKAN LABORATORIOTYÖT 1. Oulun yliopisto Fysiikan tutkinto-ohjelma Kevät 2016
 1 76111P-01 FYSIIKAN LABORATORIOTYÖT 1 Oulun yliopisto Fysiikan tutkinto-ohjelma Kevät 016 JOHDANTO Fysiikassa pyritään löytämään luonnosta lainalaisuuksia, joita voidaan mitata kokeellisesti ja kuvata
1 76111P-01 FYSIIKAN LABORATORIOTYÖT 1 Oulun yliopisto Fysiikan tutkinto-ohjelma Kevät 016 JOHDANTO Fysiikassa pyritään löytämään luonnosta lainalaisuuksia, joita voidaan mitata kokeellisesti ja kuvata
Järvirovantien parantaminen ja pysäköintialueen rakentaminen, Kittilä / Levi. Katusuunnitelma RAKENNUSTAPASELOSTUS. Liite 1
 Liite 1 Kittilän kunta Tekninen osasto Järvirovantien parantaminen ja pysäköintialueen rakentaminen, Kittilä / Levi Katusuunnitelma 2 SISÄLTÖ YLEISTÄ 3 1000 MAA-, POHJA- JA KALLIORAKENTEET 3 1000.01 Mittaustyöt
Liite 1 Kittilän kunta Tekninen osasto Järvirovantien parantaminen ja pysäköintialueen rakentaminen, Kittilä / Levi Katusuunnitelma 2 SISÄLTÖ YLEISTÄ 3 1000 MAA-, POHJA- JA KALLIORAKENTEET 3 1000.01 Mittaustyöt
Vanha-Kirkkotie ja siihen liittyvät kadut pilot-kohde. Sauli Hakkarainen, aluepäällikkö Espoon kaupunki / katu- ja viherpalvelut / suunnittelu
 ja siihen liittyvät kadut pilot-kohde, aluepäällikkö Espoon kaupunki / katu- ja viherpalvelut / suunnittelu Tuotemallikohteiden rakentaminen Vanha Kirkkotie Vanhan Kirkkotien ja liittyvien katujen rakentaminen
ja siihen liittyvät kadut pilot-kohde, aluepäällikkö Espoon kaupunki / katu- ja viherpalvelut / suunnittelu Tuotemallikohteiden rakentaminen Vanha Kirkkotie Vanhan Kirkkotien ja liittyvien katujen rakentaminen
RAPORTTI 04013522 12lUMVl2001. Urpo Vihreäpuu. Jakelu. OKMElOutokumpu 2 kpl PAMPALON RTK-KIINTOPISTEET. Sijainti 1:50 000. Avainsanat: RTK-mittaus
 RAPORTTI 04013522 12lUMVl2001 Urpo Vihreäpuu Jakelu OKMElOutokumpu 2 kpl PAMPALON RTK-KIINTOPISTEET - 4333 07 Sijainti 1:50 000 Avainsanat: RTK-mittaus OUTOKUMPU MINING OY Mairninetsnnta RAPORTTI 04013522
RAPORTTI 04013522 12lUMVl2001 Urpo Vihreäpuu Jakelu OKMElOutokumpu 2 kpl PAMPALON RTK-KIINTOPISTEET - 4333 07 Sijainti 1:50 000 Avainsanat: RTK-mittaus OUTOKUMPU MINING OY Mairninetsnnta RAPORTTI 04013522
Graniittirakennus Kallio Oy Taustaa. Tilaajien vaatimukset
 MANK PÄIVÄT 24.9.2015 Tietomallit työmaan näkökulmasta missä mennään uuden teknologian soveltamisessa Graniittirakennus Kallio Oy -2013 Taustaa Tilaajien vaatimukset Suurimpien tilaajien (suuret kunnat,
MANK PÄIVÄT 24.9.2015 Tietomallit työmaan näkökulmasta missä mennään uuden teknologian soveltamisessa Graniittirakennus Kallio Oy -2013 Taustaa Tilaajien vaatimukset Suurimpien tilaajien (suuret kunnat,
Janne Heikkinen. Koneohjatun kaivinkoneen toteumamittausten käyttö infrarakennustyömaan määräseurannassa
 Janne Heikkinen Koneohjatun kaivinkoneen toteumamittausten käyttö infrarakennustyömaan määräseurannassa Metropolia Ammattikorkeakoulu Insinööri (AMK) Maanmittaustekniikka Insinöörityö 21.11.2016 Tiivistelmä
Janne Heikkinen Koneohjatun kaivinkoneen toteumamittausten käyttö infrarakennustyömaan määräseurannassa Metropolia Ammattikorkeakoulu Insinööri (AMK) Maanmittaustekniikka Insinöörityö 21.11.2016 Tiivistelmä
Nurmijärven kunta TARJOUSPYYNTÖ 1(6) PL37 01901 Nurmijärvi 30.1.2014
 PL37 01901 Nurmijärvi 30.1.2014") Nurmijärven kunta TARJOUSPYYNTÖ 1(6) TAKYMETRIN HANKINTA Hankinnan kohde Hankinnan kuvaus Takymetri GNSS antennivarustuksella Pyydämme tarjoustanne käyttökiintopisteiden mittauksessa sekä kartoitus- ja
Nurmijärven kunta TARJOUSPYYNTÖ 1(6) TAKYMETRIN HANKINTA Hankinnan kohde Hankinnan kuvaus Takymetri GNSS antennivarustuksella Pyydämme tarjoustanne käyttökiintopisteiden mittauksessa sekä kartoitus- ja
TR 10 Liite 1 2008-03-20. PANK-HYVÄKSYNTÄ Lisävaatimukset PTM-mittaukselle. C) mspecta
 mspecta") PANK-HYVÄKSYNTÄ Lisävaatimukset PTM-mittaukselle C) mspecta 1 Tuotesertifiointi PANK-HYVÄKSYNTÄ Lisävaatimukset PTM-mittaukselle 1 Yleistä PANK Laboratoriotoimikunta on hyväksynyt ohjeen PANKhyväksyntä
PANK-HYVÄKSYNTÄ Lisävaatimukset PTM-mittaukselle C) mspecta 1 Tuotesertifiointi PANK-HYVÄKSYNTÄ Lisävaatimukset PTM-mittaukselle 1 Yleistä PANK Laboratoriotoimikunta on hyväksynyt ohjeen PANKhyväksyntä
3D-Win 5.3. Tierakenneohje. 3D-system Oy Kielotie 14 B 01300 VANTAA puh. 09-2532 4411 www.3d-system.fi (10/2008)
") 3D-Win 5.3 Tierakenneohje 3D-system Oy Kielotie 14 B 01300 VANTAA puh. 09-2532 4411 www.3d-system.fi (10/2008) Sisällysluettelo: 1 LÄHTÖAINEISTOT... 3 2 TIHENNYS... 3 3 AINEISTOT MITTALAITTEISIIN... 4
3D-Win 5.3 Tierakenneohje 3D-system Oy Kielotie 14 B 01300 VANTAA puh. 09-2532 4411 www.3d-system.fi (10/2008) Sisällysluettelo: 1 LÄHTÖAINEISTOT... 3 2 TIHENNYS... 3 3 AINEISTOT MITTALAITTEISIIN... 4
VRT Finland Oy SAKKA-ALTAAN POHJATOPOGRAFIAN MÄÄRITTÄMINEN KAIKULUOTAAMALLA
 VRT Finland Oy SAKKA-ALTAAN POHJATOPOGRAFIAN MÄÄRITTÄMINEN KAIKULUOTAAMALLA TARKASTUSRAPORTTI 1 (7) Sisällys 1. Kohde... 2 1.1 Kohteen kuvaus... 2 1.2 Tarkastusajankohta... 2 1.3 Työn kuvaus... 2 2. Havainnot...
VRT Finland Oy SAKKA-ALTAAN POHJATOPOGRAFIAN MÄÄRITTÄMINEN KAIKULUOTAAMALLA TARKASTUSRAPORTTI 1 (7) Sisällys 1. Kohde... 2 1.1 Kohteen kuvaus... 2 1.2 Tarkastusajankohta... 2 1.3 Työn kuvaus... 2 2. Havainnot...
Laboratorioraportti 3
 KON-C3004 Kone-ja rakennustekniikan laboratoriotyöt Laboratorioraportti 3 Laboratorioharjoitus 1B: Ruuvijohde Ryhmä S: Pekka Vartiainen 427971 Jari Villanen 69830F Anssi Petäjä 433978 Mittaustilanne Harjoituksessa
KON-C3004 Kone-ja rakennustekniikan laboratoriotyöt Laboratorioraportti 3 Laboratorioharjoitus 1B: Ruuvijohde Ryhmä S: Pekka Vartiainen 427971 Jari Villanen 69830F Anssi Petäjä 433978 Mittaustilanne Harjoituksessa
KONEOHJAUS MAANRAKENNUSTYÖSSÄ
 Saimaan ammattikorkeakoulu Tekniikka Lappeenranta Rakennustekniikka Maa- ja kalliorakentaminen Juha-Matti Nieminen KONEOHJAUS MAANRAKENNUSTYÖSSÄ Opinnäytetyö 2011 TIIVISTELMÄ Juha-Matti Nieminen Koneohjaus
Saimaan ammattikorkeakoulu Tekniikka Lappeenranta Rakennustekniikka Maa- ja kalliorakentaminen Juha-Matti Nieminen KONEOHJAUS MAANRAKENNUSTYÖSSÄ Opinnäytetyö 2011 TIIVISTELMÄ Juha-Matti Nieminen Koneohjaus
Koneistusyritysten kehittäminen. Mittaustekniikka. Mittaaminen ja mittavälineet. Rahoittajaviranomainen: Satakunnan ELY-keskus
 Koneistusyritysten kehittäminen Mittaustekniikka Mittaaminen ja mittavälineet Rahoittajaviranomainen: Satakunnan ELY-keskus Yleistä Pidä työkalut erillään mittavälineistä Ilmoita rikkoutuneesta mittavälineestä
Koneistusyritysten kehittäminen Mittaustekniikka Mittaaminen ja mittavälineet Rahoittajaviranomainen: Satakunnan ELY-keskus Yleistä Pidä työkalut erillään mittavälineistä Ilmoita rikkoutuneesta mittavälineestä
PANK-4113 PANK PÄÄLLYSTEEN TIHEYS, DOR -MENETELMÄ. Asfalttipäällysteet ja massat, perusmenetelmät
 Asfalttipäällysteet ja massat, perusmenetelmät PANK-4113 PANK PÄÄLLYSTEEN TIHEYS, DOR -MENETELMÄ PÄÄLLYSTEALAN NEUVOTTELUKUNTA Hyväksytty: Korvaa menetelmän: 13.05.2011 17.04.2002 1. MENETELMÄN TARKOITUS
Asfalttipäällysteet ja massat, perusmenetelmät PANK-4113 PANK PÄÄLLYSTEEN TIHEYS, DOR -MENETELMÄ PÄÄLLYSTEALAN NEUVOTTELUKUNTA Hyväksytty: Korvaa menetelmän: 13.05.2011 17.04.2002 1. MENETELMÄN TARKOITUS
FINNREF- TUKIASEMAVERKKO/PAIKANNUS- PALVELU JA SEN KEHITTÄMINEN
 FINNREF- TUKIASEMAVERKKO/PAIKANNUS- PALVELU JA SEN KEHITTÄMINEN 22.3.2018 Maanmittauspäivät 2018 Marko Ollikainen 1 Esityksen sisältö: - Taustaa - Nyt - Tulevaisuutta FINNREF TUKIASEMAVERKKO JA PAIKANNUSPALVELU
FINNREF- TUKIASEMAVERKKO/PAIKANNUS- PALVELU JA SEN KEHITTÄMINEN 22.3.2018 Maanmittauspäivät 2018 Marko Ollikainen 1 Esityksen sisältö: - Taustaa - Nyt - Tulevaisuutta FINNREF TUKIASEMAVERKKO JA PAIKANNUSPALVELU
4G LTE-verkkojen sisätilakuuluvuusvertailu 1H2014
 4G LTE-verkkojen sisätilakuuluvuusvertailu 1H2014 27. kesäkuuta 2014 Omnitele Ltd. Mäkitorpantie 3B P.O. Box 969, 00101 Helsinki Finland Puh: +358 9 695991 Fax: +358 9 177182 E-mail: contact@omnitele.fi
4G LTE-verkkojen sisätilakuuluvuusvertailu 1H2014 27. kesäkuuta 2014 Omnitele Ltd. Mäkitorpantie 3B P.O. Box 969, 00101 Helsinki Finland Puh: +358 9 695991 Fax: +358 9 177182 E-mail: contact@omnitele.fi
Automaattinen betonin ilmamäärämittaus
 Automaattinen betonin ilmamäärämittaus 1.11.2017 DI, Projektityöntekijä Aalto-yliopisto Teemu Ojala Betonitutkimusseminaari 2017 Messukeskus, Kokoustamo Esitelmän sisältö 1. Tausta ja tutkimustarve 2.
Automaattinen betonin ilmamäärämittaus 1.11.2017 DI, Projektityöntekijä Aalto-yliopisto Teemu Ojala Betonitutkimusseminaari 2017 Messukeskus, Kokoustamo Esitelmän sisältö 1. Tausta ja tutkimustarve 2.
MALLIPOHJAINEN LAADUNVARMISTUS ALUEMAISEN INFRARAKENTAMISEN PROJEKTISSA
 MALLIPOHJAINEN LAADUNVARMISTUS ALUEMAISEN INFRARAKENTAMISEN PROJEKTISSA Jonne Ruopsa Opinnäytetyö Tekniikka ja liikenne Maanmittaustekniikka Insinööri (AMK) 2018 Opinnäytetyön tiivistelmä Tekniikka ja
MALLIPOHJAINEN LAADUNVARMISTUS ALUEMAISEN INFRARAKENTAMISEN PROJEKTISSA Jonne Ruopsa Opinnäytetyö Tekniikka ja liikenne Maanmittaustekniikka Insinööri (AMK) 2018 Opinnäytetyön tiivistelmä Tekniikka ja
Betonin suhteellisen kosteuden mittaus
 Betonin suhteellisen kosteuden mittaus 1. BETONIN SUHTEELLISEN KOSTEUDEN TARKOITUS 2. KOHTEEN LÄHTÖTIEDOT 3. MITTAUSSUUNNITELMA 4. LAITTEET 4.1 Mittalaite 4.2 Mittalaitteiden tarkastus ja kalibrointi 5.
Betonin suhteellisen kosteuden mittaus 1. BETONIN SUHTEELLISEN KOSTEUDEN TARKOITUS 2. KOHTEEN LÄHTÖTIEDOT 3. MITTAUSSUUNNITELMA 4. LAITTEET 4.1 Mittalaite 4.2 Mittalaitteiden tarkastus ja kalibrointi 5.
Kokemuksia tietomallipohjaisen
 Kokemuksia tietomallipohjaisen Vt 3-18 parantaminen Laihian kohdalla Projektipäällikkö / Projektinjohtaja Liikennevirasto projektien suunnittelu ja toteutus Aikaisempi työura; Lemminkäinen Infra 1983-1997
Kokemuksia tietomallipohjaisen Vt 3-18 parantaminen Laihian kohdalla Projektipäällikkö / Projektinjohtaja Liikennevirasto projektien suunnittelu ja toteutus Aikaisempi työura; Lemminkäinen Infra 1983-1997
Mittaustulosten tilastollinen käsittely
 Mittaustulosten tilastollinen käsittely n kertaa toistetun mittauksen tulos lasketaan aritmeettisena keskiarvona n 1 x = x i n i= 1 Mittaustuloksen hajonnasta aiheutuvaa epävarmuutta kuvaa keskiarvon keskivirhe
Mittaustulosten tilastollinen käsittely n kertaa toistetun mittauksen tulos lasketaan aritmeettisena keskiarvona n 1 x = x i n i= 1 Mittaustuloksen hajonnasta aiheutuvaa epävarmuutta kuvaa keskiarvon keskivirhe
Lumitöiden estekartoitus
 Lumitöiden estekartoitus Infra FINBIM Pilottipäivä nro 8 Eija Heikkilä 24.10.2013 Sisällysluettelo Tausta ja tavoite Toteutus Tulokset ja havaitut ongelmat Tausta ja tavoite Lumitöissä rikottujen laitteiden
Lumitöiden estekartoitus Infra FINBIM Pilottipäivä nro 8 Eija Heikkilä 24.10.2013 Sisällysluettelo Tausta ja tavoite Toteutus Tulokset ja havaitut ongelmat Tausta ja tavoite Lumitöissä rikottujen laitteiden
PANK PANK-4122 ASFALTTIPÄÄLLYSTEEN TYHJÄTILA, PÄÄLLYSTETUTKAMENETELMÄ 1. MENETELMÄN TARKOITUS
 PANK-4122 PANK PÄÄLLYSTEALAN NEUVOTTELUKUNTA ASFALTTIPÄÄLLYSTEEN TYHJÄTILA, PÄÄLLYSTETUTKAMENETELMÄ Hyväksytty: Korvaa menetelmän: 9.5.2008 26.10.1999 1. MENETELMÄN TARKOITUS 2. MENETELMÄN SOVELTAMISALUE
PANK-4122 PANK PÄÄLLYSTEALAN NEUVOTTELUKUNTA ASFALTTIPÄÄLLYSTEEN TYHJÄTILA, PÄÄLLYSTETUTKAMENETELMÄ Hyväksytty: Korvaa menetelmän: 9.5.2008 26.10.1999 1. MENETELMÄN TARKOITUS 2. MENETELMÄN SOVELTAMISALUE
Mallinnus tunkee infratyömaalle? Joutaako piirustukset roskakoriin? Sopiiko tabletti joka käteen?
 Mallinnus tunkee infratyömaalle? Joutaako piirustukset roskakoriin? Sopiiko tabletti joka käteen? Tulvavallin mallinnus, ekologiaajatukset ja mallijohteinen toiminta Tulvaan varautuminen Vuonna 2005 meren
Mallinnus tunkee infratyömaalle? Joutaako piirustukset roskakoriin? Sopiiko tabletti joka käteen? Tulvavallin mallinnus, ekologiaajatukset ja mallijohteinen toiminta Tulvaan varautuminen Vuonna 2005 meren
GPS-koulutus Eräkarkku Petri Kuusela. p
 GPS-koulutus 2018 Eräkarkku Petri Kuusela tulirauta@gmail.com p. 040 772 3720 GPS toiminnallisuudet Missä olen (koordinaatit, kartalla) Opasta minut (navigointi) Paljonko matkaa (navigointi maastossa)
GPS-koulutus 2018 Eräkarkku Petri Kuusela tulirauta@gmail.com p. 040 772 3720 GPS toiminnallisuudet Missä olen (koordinaatit, kartalla) Opasta minut (navigointi) Paljonko matkaa (navigointi maastossa)
Access. Käyttöturva. Rahoitus. Assistant. Paikkatieto. VRSnet. GIS-mobiilipalvelut
 Access Käyttöturva Rahoitus Assistant VRSnet Paikkatieto GIS-mobiilipalvelut Mittaustiedon hallinta Trimble Access Tuo maasto ja toimisto lähemmäksi toisiaan Trimble Access Joustava tiedon jakaminen Toimistosta
Access Käyttöturva Rahoitus Assistant VRSnet Paikkatieto GIS-mobiilipalvelut Mittaustiedon hallinta Trimble Access Tuo maasto ja toimisto lähemmäksi toisiaan Trimble Access Joustava tiedon jakaminen Toimistosta
TURKU. http://fi.wikipedia.org/wiki/turku
 Turun kaupungin maastomittauspalvelut ja koordinaaattijärjestelmän vaihto käytännössä Tampereen seutukunnan maanmittauspäivät Ikaalisten kylpylässä 17.-18.3.2010, Harri Kottonen Kuka Harri Kottonen, Mittaustyöpäällikkö
Turun kaupungin maastomittauspalvelut ja koordinaaattijärjestelmän vaihto käytännössä Tampereen seutukunnan maanmittauspäivät Ikaalisten kylpylässä 17.-18.3.2010, Harri Kottonen Kuka Harri Kottonen, Mittaustyöpäällikkö
HS-Veden tarkemittausohje versio 1.9.2014
 HS-VESI HS-Vedentarkemittausohjeversio1.9.2014 Jarno Laine 1.9.2014 REV. 1.9.2014 lisätty tonttijohtojen päiden mittausohje, sekä mittaustietojen sähköpostiosoite HS-Vedentarkemittausohjeversio1.9.2014
HS-VESI HS-Vedentarkemittausohjeversio1.9.2014 Jarno Laine 1.9.2014 REV. 1.9.2014 lisätty tonttijohtojen päiden mittausohje, sekä mittaustietojen sähköpostiosoite HS-Vedentarkemittausohjeversio1.9.2014
KONEOHJAUSMALLIN TUOTTAMISEN PERUSOHJE
 KONEOHJAUSMALLIN TUOTTAMISEN PERUSOHJE Samu Leppänen Samuli Niskala Opinnäytetyö Tekniikka ja liikenne Maanmittaustekniikka Insinööri (AMK) 2016 Opinnäytetyön tiivistelmä Tekniikka ja liikenne Maanmittaustekniikka
KONEOHJAUSMALLIN TUOTTAMISEN PERUSOHJE Samu Leppänen Samuli Niskala Opinnäytetyö Tekniikka ja liikenne Maanmittaustekniikka Insinööri (AMK) 2016 Opinnäytetyön tiivistelmä Tekniikka ja liikenne Maanmittaustekniikka
Kansallinen maastotietokanta. KMTK Kuntien tuotantoprosessit: Selvitys mobiilikartoitusmenetelmistä
 Kansallinen maastotietokanta KMTK Kuntien tuotantoprosessit: Selvitys mobiilikartoitusmenetelmistä Projektin selvitys 1 Sisältö 1 YLEISTÄ... 2 1.1 LYHENTEISTÄ JA TERMEISTÄ... 2 2 YLEISTÄ MOBIILIKARTOITUSJÄRJESTELMISTÄ...
Kansallinen maastotietokanta KMTK Kuntien tuotantoprosessit: Selvitys mobiilikartoitusmenetelmistä Projektin selvitys 1 Sisältö 1 YLEISTÄ... 2 1.1 LYHENTEISTÄ JA TERMEISTÄ... 2 2 YLEISTÄ MOBIILIKARTOITUSJÄRJESTELMISTÄ...
Operaattorivertailu SELVITYS LTE VERKKOJEN KUULUVUUDESTA
 Operaattorivertailu SELVITYS LTE VERKKOJEN KUULUVUUDESTA SISÄLLYSLUETTELO TIIVISTELMÄ... 3 YLEISTÄ... 4 TAVOITE... 5 PAIKKAKUNNAT... 5 MITATUT SUUREET JA MITTAUSJÄRJESTELMÄ... 6 MITATUT SUUREET... 6 MITTAUSJÄRJESTELMÄ...
Operaattorivertailu SELVITYS LTE VERKKOJEN KUULUVUUDESTA SISÄLLYSLUETTELO TIIVISTELMÄ... 3 YLEISTÄ... 4 TAVOITE... 5 PAIKKAKUNNAT... 5 MITATUT SUUREET JA MITTAUSJÄRJESTELMÄ... 6 MITATUT SUUREET... 6 MITTAUSJÄRJESTELMÄ...
Mittausprojekti 2017
 Mittausprojekti 2017 Hajonta et al Tulos vs. mittaus? Tilastolliset tunnusluvut pitää laskea (keskiarvot ja hajonnat). Tuloksia esitetään, ei sitä kuinka paljon ryhmä teki töitä mitatessaan. Yksittäisiä
Mittausprojekti 2017 Hajonta et al Tulos vs. mittaus? Tilastolliset tunnusluvut pitää laskea (keskiarvot ja hajonnat). Tuloksia esitetään, ei sitä kuinka paljon ryhmä teki töitä mitatessaan. Yksittäisiä
Toteutusmalleihin liittyvät haasteet Äänekosken ratahankkeella Pauli Ruokanen VR Track Oy, Suunnittelu
 Toteutusmalleihin liittyvät haasteet Äänekosken ratahankkeella 1.2.2017 Pauli Ruokanen VR Track Oy, Suunnittelu Yleistä hankkeesta Äänekosken biotuotetehtaan liikenneyhteydet, ratahanke Tampere-Jyväskylä,
Toteutusmalleihin liittyvät haasteet Äänekosken ratahankkeella 1.2.2017 Pauli Ruokanen VR Track Oy, Suunnittelu Yleistä hankkeesta Äänekosken biotuotetehtaan liikenneyhteydet, ratahanke Tampere-Jyväskylä,
SATELLIITTIMITTAUS MAANRAKENTAMISESSA JA MAANMITTAUSKALUSTON HANKINNAN SUUNNITTELU
 OPINNÄYTETYÖ - AMMATTIKORKEAKOULUTUTKINTO TEKNIIKAN JA LIIKENTEEN ALA SATELLIITTIMITTAUS MAANRAKENTAMISESSA JA MAANMITTAUSKALUSTON HANKINNAN SUUNNITTELU T E K I J Ä : Josi Kokkonen SAVONIA-AMMATTIKORKEAKOULU
OPINNÄYTETYÖ - AMMATTIKORKEAKOULUTUTKINTO TEKNIIKAN JA LIIKENTEEN ALA SATELLIITTIMITTAUS MAANRAKENTAMISESSA JA MAANMITTAUSKALUSTON HANKINNAN SUUNNITTELU T E K I J Ä : Josi Kokkonen SAVONIA-AMMATTIKORKEAKOULU
Trimble S7: SureScan, pistepilvet ja VISION-kuvantaminen tee näin Kari Tenhunen Geotrim Kä K y ä tt t äj t äpäivä v t ä
 Trimble S7: SureScan, pistepilvet ja VISION-kuvantaminen tee näin Kari Tenhunen Sisältö Työn perustaminen ja siihen liittyvät asetukset VISION-teknologian hyödyntämien Prismanhaku Kuvien ottaminen lisätietona
Trimble S7: SureScan, pistepilvet ja VISION-kuvantaminen tee näin Kari Tenhunen Sisältö Työn perustaminen ja siihen liittyvät asetukset VISION-teknologian hyödyntämien Prismanhaku Kuvien ottaminen lisätietona
Mobiiliverkkojen vertailumittaus Seinäjoki
 Mobiiliverkkojen vertailumittaus Seinäjoki Joulukuu 2018 1. Tiivistelmä... 3 2. Johdanto... 4 3. Tulokset... 5 4. Menetelmä... 9 1. Tiivistelmä Syksyllä 2018 suoritetussa tutkimuksessa selvitettiin LTE-verkkojen
Mobiiliverkkojen vertailumittaus Seinäjoki Joulukuu 2018 1. Tiivistelmä... 3 2. Johdanto... 4 3. Tulokset... 5 4. Menetelmä... 9 1. Tiivistelmä Syksyllä 2018 suoritetussa tutkimuksessa selvitettiin LTE-verkkojen
Laadunvarmistusmittaukset tietomallipohjaisessa
 Laadunvarmistusmittaukset tietomallipohjaisessa väylärakentamisessa 34. Rakennuttajakoulutus Tutkielma Janne Pietarinen Skanska Infra Oy Helsinki 19.10.2012 Aalto University Professional Development Tiivistelmä
Laadunvarmistusmittaukset tietomallipohjaisessa väylärakentamisessa 34. Rakennuttajakoulutus Tutkielma Janne Pietarinen Skanska Infra Oy Helsinki 19.10.2012 Aalto University Professional Development Tiivistelmä
Mobiiliverkkojen vertailumittaus Tampere, Jyväskylä, Turku
 Mobiiliverkkojen vertailumittaus Tampere, Jyväskylä, Turku Marraskuu 2018 1. Tiivistelmä... 3 2. Johdanto... 4 3. Tulokset... 5 3.1. Kaupunkikohtaiset tulokset, Tampere... 5 3.1. Kaupunkikohtaiset tulokset,
Mobiiliverkkojen vertailumittaus Tampere, Jyväskylä, Turku Marraskuu 2018 1. Tiivistelmä... 3 2. Johdanto... 4 3. Tulokset... 5 3.1. Kaupunkikohtaiset tulokset, Tampere... 5 3.1. Kaupunkikohtaiset tulokset,