Lääkintähelikopterikaluston mallintaminen
|
|
|
- Tuula Laakso
- 10 vuotta sitten
- Katselukertoja:
Transkriptio
1 Mat Operaatiotutkimuksen projektityöseminaari Lääkintähelikopterikaluston mallintaminen Loppuraportti Toimeksiantaja: HEMS-hallinnointiyksikköhanke Yhteyshenkilö: Jyri Örri Projektityöryhmä: Tero Tyrväinen 69956V Ilmari Kuikka 58634A Osmo Salomaa 58584J

2 Sisällysluettelo 1 Johdanto Aineisto Lääkärihelikopterin tehtävän kulku Tehtävän suoritusprosessi Mallissa käytetyt parametrit Optimointimallin rakenne Tehtävän monitavoitteinen luonne Hakualgoritmi Hakualgoritmin toteutus Huomioita hakualgoritmin toiminnasta Simulaatio Tarvittava data Seuraavien tapahtuma-aikojen laskenta Simulaation kulku Suoritusarvojen mallinnus Taustaa Painot Polttoaine Laskenta Tulokset Tulosten herkkyys satunnaisuudelle Nykytilanne Tukikohta-kombinaatioiden tarkastelu Suoritusarvojen vertailua Tukikohtien määrä Johtopäätökset Tukikohtien sijoittelu Helikopterit Tulosten luotettavuuden tarkastelu Datan epäluotettavuus Tulosten kalibrointi Maanpäälliset lääkäriambulanssit Viitteet

3 1 Johdanto Tämä loppuraportti esittelee tutkimusta, joka on tehty Teknillisen korkeakoulun Projektityöseminaari-kurssin yhteydessä. Toimeksiantajana projektissa toimi HEMS-Hallinnointiyksikkö hanke. Projektissa mallinnettiin Suomen lääkäri- ja lääkintähelikopteritoimintaa. Lääkäri- ja lääkintähelikopteritoiminta (HEMS, Helicopter Emergency Medical Service) on tähän saakka ollut Suomessa paikallisten tukiyhdistysten järjestämää. Rahoitus on suurimmaksi osaksi saatu Rahaautomaattiyhdistykseltä, ja lääkärityövoima tukikohdan alueen sairaanhoitopiireitä. Yksiköiden sijoituspaikat ovat perustuneet lähinnä tukiyhdistysten intresseihin sijoituspaikoista, eikä systemaattista analyysiä sijoituspaikoista ole tehty. Joulukuussa 2009 käynnistyneen HEMS-Hallinnointiyksikkö hankkeen tavoitteena on luoda maahan organisaatio, joka vastaa keskitetysti HEMS-toiminnan organisoimisesta. Hankkeessa ovat mukana maamme viisi yliopistollista keskussairaalaa (Helsinki, Turku, Tampere, Kuopio sekä Oulu) ja sen rahoittaa Sosiaalija terveysministeriö. Hanketta hallinnoi Pohjois-Savon sairaanhoitopiiri (Kuopio). HEMS-Hallinnointiyksikkö hankkeen tavoitteisiin kuuluu helikoptereiden sijoituspaikkojen uudelleenarviointi ja sopivan helikopterikaluston määrittäminen. Tässä raportissa esitetty simulaatio tehtiin tukemaan sekä tukikohtien sijoitukseen että helikopterimallin valintaan liittyvää päätöksentekoa. Kun helikopterimallinnusta käytetään kilpailutuksen yhteydessä, on oltava tarjoajan vastuulla toimittaa käyttökelpoinen data simuloitavaksi. Huolimatta tässä käytetyn lähdemateriaalin mahdollisesta epätarkkuudesta, simulaation on todettu toimivan ja on siten onnistunut. Simulaatiossa mallinnetaan pelkästään lääkärihelikoptereiden toimintaa Suomessa. Aiheeseen kiinteästi liittyvien ambulanssien toiminta on rajattu mallista ulos, jottei mallista tulisi liian monimutkainen tämän projektin puitteissa kehitettäväksi. Ambulanssitoiminnan mallinnus on sinänsä hyvin samantyylinen ongelma, ja sitä voitaisiin lähestyä melko samalla tavalla, kuin lääkintähelikopteritoimintaa on tässä projektissa lähestytty. Laskennan puolesta ambulanssitoiminnan mallinnus olisi raskaampi tehtävä. Raportissa kerrotaan ensin millaista aineisto projektissa käytettiin. Sen jälkeen käydään hieman läpi lääkärihelikoptereiden toimintaa. Projektissa käytetty optimointimenetelmä jakautuu kolmeen osaan: hakualgoritmiin, simulaatioon ja helikoptereiden suoritusarvojen mallinnukseen. Tulosten tarkastelulle annetaan raportissa merkittävä paino. Lopuksi käydään läpi johtopäätökset ja tarkastellaan tulosten luotettavuutta. 3

4 2 Aineisto HEMS hallinnointiyksikkö hanke on toimittanut projektia varten valmiina Suomen maa-alan käsittävän aineiston sekä potentiaalisten tukikohtien ja sairaaloiden sijainnit. Suomen maa-ala on jaettu simulaatiota varten hilaan, joka sisältää noin km 2 -kokoista kuusikulmaista solua. Kullekin näistä soluista on laskettu valmiiksi tehtävätodennäköisyyden odotusarvot (tehtävää vuodessa) erikseen päivä- ja yöajoille. Tehtävätodennäköisyydet on laskettu regressiomallilla, jossa selittävinä tekijöinä ovat solun asukasmäärä, sukupuoli- ja ikäjakauma sekä solun tiestön yhteenlaskettu pituus tieluokittain. Näiden lisäksi hilaan on laskettu helikopterien suorituskykyyn vaikuttavat solun korkeus merenpinnasta, lämpötilan keskiarvo ja keskihajonta kuukausittain sekä ilmanpaineen keskiarvo ja keskihajonta kuukausittain. Potentiaalisia tukikohtia on määritelty 52 kappaletta. Nämä ovat esitetty kuvassa 1. Osa näistä sijaitsee sairaaloiden yhteydessä ja osa lentokentillä. Sairaaloista on tiedossa erikseen mitkä sairaalat ovat läpi vuorokauden valmiudessa ja kykenevät ottamaan vastaan helikopterilla tuotavia potilaita. Kuva 1: Potentiaaliset tukikohdat, joista punaisella ne, joiden yhteydessä on sairaala, johon voidaan kuljettaa potilaita 4

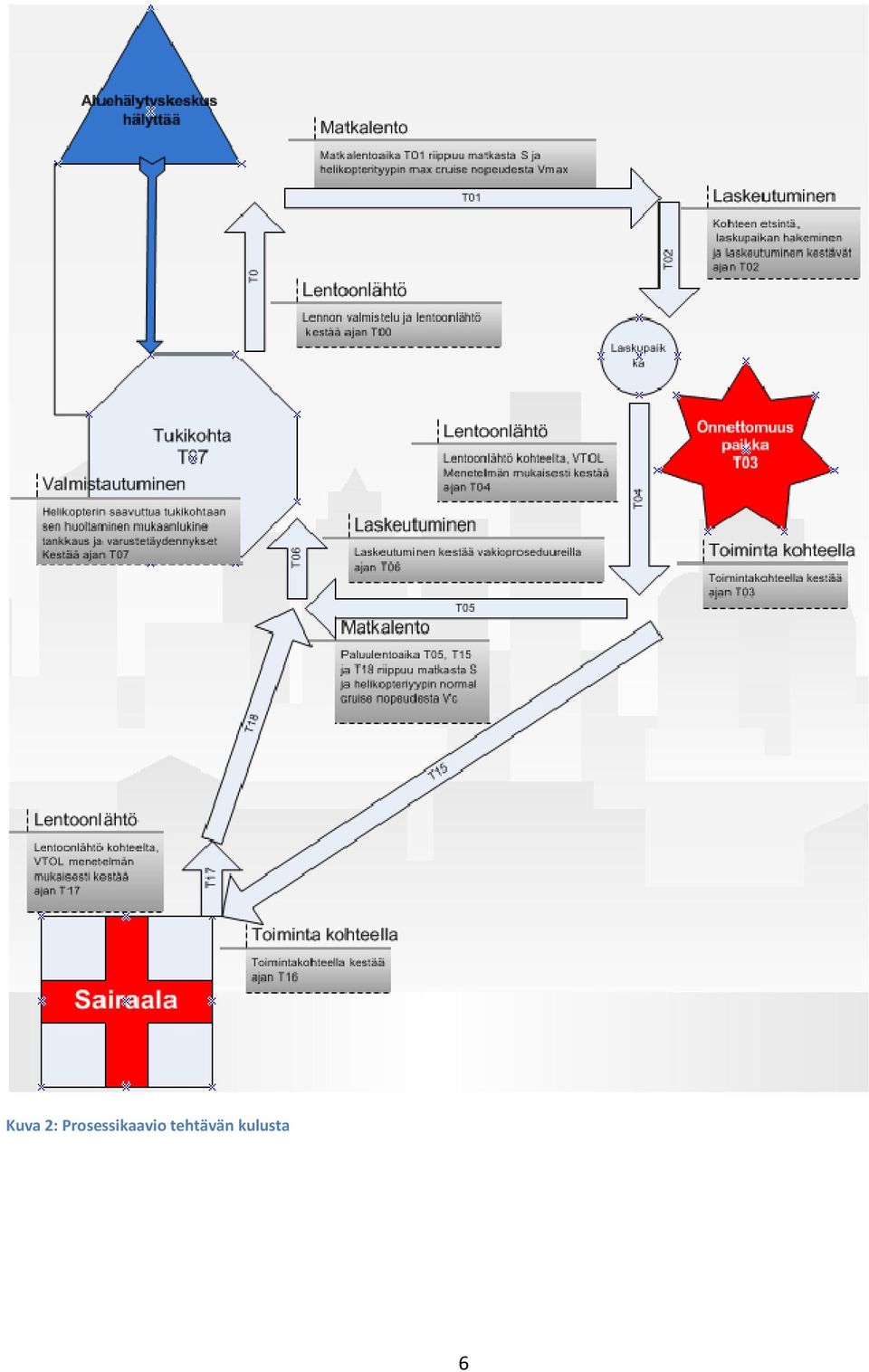
5 3 Lääkärihelikopterin tehtävän kulku 3.1 Tehtävän suoritusprosessi Kun lääkärihelikopterille tulee hälytys, ensimmäisenä on mietittävä, voiko helikopteri suorittaa kyseistä tehtävää. Tehtävä joudutaan jättämään suorittamatta, jos helikopteri on suorittamassa toista tehtävää, sää on liian huono tai kohde on niin kaukana, ettei helikopterin kantama riitä. Jos helikopteri pystyy suorittamaan tehtävän, suoritusprosessi etenee seuraavasti: 1. Hälytys 2. Lähtöön valmistautuminen ja lentoonlähtö 3. Lento kohteelle 4. Kohteen etsintä ja laskeutuminen 5. Potilaan hoito kohteessa 6. Potilaan mahdollinen kuljetus sairaalaan a. Lentoonlähtö b. Lento sairaalaan c. Potilaan hoito sairaalassa 7. Lentoonlähtö 8. Paluulento tukikohtaan 9. Laskeutuminen tukikohtaan 10. Tankkaus ja varusteiden täydennys seuraavaa tehtävää varten tukikohdassa tukikohdassa 5

6 Kuva 2: Prosessikaavio tehtävän kulusta 6
7 3.2 Mallissa käytetyt parametrit Tehtävän suorittamiseen liittyy monia parametreja, kuten lähtöön kuluva aika ja toiminta-aika potilaan luona. Todellisuudessa näissä luvuissa esiintyy vaihtelua eri tehtävien välillä, mutta projektissa tehdyissä laskennoissa ne oletettiin vakioiksi. Malliin liittyvinä parametreina käytettiin seuraavanlaisia arvoja: Lentoonlähtöön kuluva aika (riippumatta lähdetäänkö tukikohdasta vai potilaan luota): 7 minuuttia Laskeutumiseen kuluva aika (riippumatta siitä, mihin laskeudutaan): 3 minuuttia Potilaan luona kuluva aika: 20 minuuttia Todennäköisyys, että potilas joudutaan kuljettamaan sairaalaan: 40 % Tankkaus ja varusteiden täydennys: 15 minuuttia Sairaalassa kuluva aika: 15 minuuttia Lisäksi mallissa on parametreja, jotka liittyvät siihen, miten lääkintätehtävä suoritetaan vai suoritetaanko ollenkaan: Yläraja saavuttamisajalle: 45 minuuttia Alaraja saavuttamisajalle: 15 minuuttia Säde, jota lähempää sairaalaa tehtävät suoritetaan ambulanssilla: 10 km Jos saavuttamisaika lasketaan ylärajaa suuremmaksi, tehtävää ei suoriteta. Jos saavuttamisaika lasketaan alarajaa pienemmäksi, lääkäri lähetetään kohteelle ambulanssilla. Tällöin lääkäri on poissa 60 minuuttia ja saavuttamisaika on 10 minuuttia. 7
: 3 minuuttia Potilaan luona kuluva aika: 20 minuuttia Todennäköisyys, että potilas joudutaan kuljettamaan sairaalaan: 40 % Tankkaus ja varusteiden täydennys:")
8 4 Optimointimallin rakenne Optimointimalli koostuu kolmesta komponentista: hakualgoritmista, simulaatiosta ja suorituskykymallista. Rakenne on esitetty kuvassa 3. Hakualgoritmi käy läpi tukikohtien ja helikopterityyppien mahdollisia yhdistelmiä ja suorittaa simulaation joka iteraatiolla. Simulaatio generoi satunnaisia tehtäviä ja säätiloja ja käyttää apunaan suorituskykymallia laskemaan kulloisenkin helikopterityypin kantaman ja nopeuden kulloisessakin säätilassa. Kuva 3: Optimointimallin rakenne sekä sen kolmen eri komponentin välillä siirtyvä informaatio Simulaation tuloksena saadaan ratkaisun hyvyyttä kuvaavat tavoittamisaikojen keskiarvo ja suorittamatta jääneiden tehtävien osuus, jotka ohjaavat hakualgoritmin etenemistä mahdollisten ratkaisujen avaruudessa. 5 Tehtävän monitavoitteinen luonne Lääkintähelikopteriratkaisun hyvyyttä oli määritelty kuvattavan tavoittamisaikojen jakaumalla, joka kertoo kuinka kauan kestää hälytyshetkestä siihen kun lääkäri on potilaan luona ja suorittamatta jääneiden tehtävien osuudella, joka kertoo kuinka suuri osuus kaikista helikoptereille tarkoitetuista tehtävistä jää helikoptereilta suorittamatta (ottamatta kantaa meneekö hälytyspaikalle tällöin maayksikkö ja milloin). Tavoittamisaikojen koko jakaumalla on periaatteessa merkitystä, mutta siitä valittiin tarkasteltavaksi vain keskiarvo, jotta saatiin yksi luku, jonka perusteella hakualgoritmi voi verrata rata ratkaisujen keskinäistä hyvyyttä. Tavoitteena oli löytää näiden tavoitteiden suhteen pareto-optimaalisten optimaalisten ratkaisujen joukko, eli joukko jossa yksikään ratkaisu ei ole molempien tavoitteiden suhteen muita huonompi. Asettamalla nämä paretoratkaisut kahden tavoitteen muodostamaan avaruuteen voitiin esittää näiden kahden tavoitteen välinen valintatilanne, joka on sekä ensihoidollinen valinta, joka riippuu siitä mitä potilaille tavoittamisajan kasvaessa käytännössä tapahtuu, että poliittinen valinta siitä kuinka kattavaa palvelua halutaan optimaaliset tarjota. 8

9 6 Hakualgoritmi 6.1 Hakualgoritmin toteutus Tukikohtien ja helikopterityyppien yhdistelmiä läpikäyvä hakualgoritmi on toteutettu geneettisillä algoritmeilla, joilla katsottiin helpoksi toteuttaa tehtävän vaatima monitavoiteoptimointi. Geneettisillä algoritmeilla yhtä ratkaisua kutsutaan yksilöksi ja niitä käsitellään joukkona, jota kutsutaan populaatioksi. Kullakin iteraatiokierroksella, joita kutsutaan sukupolviksi, evaluoidaan yksilöiden hyvyys ja valitaan uuden sukupolven yksilöt sekä suoraan edellisestä sukupolvesta että operaattoreilla yhdistelemällä edellisen sukupolven yksilöitä. Näin toivotaan, että hyviä ratkaisuja yhdistelemällä voidaan muodostaa edelleen parempia ratkaisuja. Tarkemman kuvauksen geneettisistä algoritmeista voi lukea esimerkiksi Goldbergin perusteoksesta [1]. Geneettiseksi koodaukseksi valittiin kaksi vektoria, joista toisessa ratkaisussa mukana olevien tukikohtien numerot (1 52) ja toisessa näissä tukikohdissa olevien helikopterien tyyppinumerot (1 8). Tällöin helikopterien määrä lukitaan etukäteen ja eri helikopterimäärien ratkaisut haetaan erikseen. Valittu koodaus ei noudata perinteistä alhaisen kardinaliteetin binäärikoodausta, mutta johtaa yksinkertaisempaan esitystapaan ja ennen kaikkea yksinkertaisempaan operaattorien toteutukseen, kun jokainen validin ratkaisun yhden alkion muutos johtaa edelleen validiin ratkaisuun. Hitaan simulaatiolaskennan rajoittamiseksi toteutettiin erillinen funktio, joka laskee yhden ratkaisun helikopterien kantama-alueella asuvan väestömäärän. Uusia ratkaisuja luodessa tarkistettiin tämä väestöllinen kattavuus ja vaadittiin että se ylittää asetetun rajan, jotta ratkaisu hyväksytään mukaan. Sekä väestöllisen kattavuuden laskevalle funktiolle, että simulaatiofunktiolle ylläpidettiin välimuistia, jotta hakualgoritmin törmätessä uudestaan jo läpikäytyyn ratkaisuun, ei sille tarvinnut enää uudestaan suorittaa hidasta laskentaa. Hakualgoritmin rakenne oli seuraava. 1. Generoi satunnainen alkupopulaatio 2. Evaluoi yksilöiden hyvyys 3. Valitse parhaita yksilöitä edellisestä sukupolvesta uudelleenvalinnalla 4. Risteytä uudelleenvalittuja yksilöitä keskenään 5. Tee satunnaismuutoksia mutaatiolla 6. Poimi yksilöt uuteen sukupolveen 7. Palaa kohtaan 2, mikäli läpikäytyjen sukupolvien määrä alle asetetun rajan Monitavoitteinen uudelleenvalinta toteutettiin Fonsecan ja Flemingin [2] esittämän pohjalta laskemalla kullekin yksilölle niiden populaation muiden yksilöiden määrä jotka dominoivat tarkasteltavaa yksilöä eli ovat parempia molempien tavoitteiden suhteen. Näin saadut huonousluvut käännettiin hyvyysluvuiksi kaavalla g i = max(b) - b i + 1, missä g i on yksilön i hyvyys, b kaikkien huonouslukujen vektori ja b i yksilön i huonous. Tämän jälkeen uudelleenvalintatodennäköisyydet laskettiin tavalliseen tapaan hyvyysarvojen suhteen lineaarisesti. Risteytys toteutettiin tavalliseen tapaan vaihtamalla kahden yksilön tukikohta- ja helikopterityyppivektorien päät keskenään satunnaisen katkaisukohdan suhteen. Mutaatio toteutettiin tavalliseen tapaan satunnaisina yhden alkion muutoksina, sillä erolla, että mutaatiota sovellettiin myös niihin risteytettyihin yksilöihin, jotka 9

10 eivät olleet väestöllisen kattavuuden suhteen riittäviä. Näitä risteytettyjä yksilöitä mutatoitiin kunnes niiden väestöllinen kattavuus ylitti vaaditun rajan. Uuteen sukupolveen valittiin mukaan sekä kaikki koko haun aikana vastaantulleet pareto-optimaaliset yksilöt (kukin vain kerran) että kiinteä määrä operaattoreilla muodostettuja uusia yksilöitä. Tämä käytännössä tarkoitti, että pareto-optimaalisten yksilöiden määrän kasvaessa myös populaation koko kasvoi joka sukupolven myötä ja siten huonojen yksilöiden mahdollisuus pärjätä uudelleenvalinnassa koko ajan heikkeni. 6.2 Huomioita hakualgoritmin toiminnasta Hakualgoritmin toiminnan kannalta olennaisin kysymys oli miten hyvin geneettisten algoritmien perusidea, että hyviä ratkaisuja yhdistämällä voidaan muodostaa vielä parempia ratkaisuja, toteutuu. Havaittiin, että haun löydettyä melko hyvän ratkaisun, haku helposti juuttui kyseiseen tilaan, koska risteytyksellä tai mutaatiolla muodostettujen uusien ratkaisujen kattavuuteen jäi helposti aukko siihen kohtaan mistä tukikohta siirrettiin jonnekin muualle. Periaatteessa paras ratkaisu havaittuun ongelmaan olisi ollut tuottaa tätä tehtävä varten suunniteltuja operaattoreita risteytyksen tilalle, jotka ottaisivat tämän asian huomioon. Näitä olisi voinut olla esimerkiksi jonkinlaiset kierto- ja venytysoperaattorit, jotka olisivat muokanneet koko ratkaisua yhtenä joukkona. Tämän työn laajuuden huomioonottaen päädyimme kuitenkin seuraaviin toimenpiteisiin tavallisten geneettisten operaattorien puitteissa. 1. Pareto-optimaalisen uudelleenvalinnan toteuttaminen dominoivien yksilöiden määrän mukaan valittiin osaltaan siksi, että tällöin hyvyysarvojen suhteen ei erityisesti haun alkuvaiheessa esiinny suuria eroja ja myös huonoilla yksilöillä on riittävän hyvät mahdollisuudet selviytyä seuraavaan sukupolven. Tällöin risteytyksellä ja mutaatiolla tuotetut uudet yksilöt voivat toimia eräänlaisina siirtymätiloina jolloin alkuperäistä paremmat yksilöt saattavat seurata vasta sukupolven tai kahden viiveellä. 2. Väestöllisen kattavuuden alaraja pidettiin melko alhaisena, arvossa 2 miljoonaa, jotta edellä mainitut lievästi huonot siirtymätilat olisivat mahdollisia. 3. Mutaatiotodennäköisyys pidettiin riittävän korkealla, arvossa 0.05, jonka lisäksi myös väestöllisesti huonosti kattavia yksilöitä mutatoitiin. Näin pyrittiin osaltaan pääsemään pois lokaaleista optimeista. 10

11 7 Simulaatio Simulaatio simuloi Suomen lääkärihelikopteritoimintaa vuoden pituisen ajanjakson verran. Helikoptereiden saamat tehtävät käydään simulaatiossa läpi yksi kerrallaan aikajärjestyksessä. Simulaatio on Matlab-funktio, joka ottaa parametreikseen tukikohdat sekä helikoptereiden tyypit ja konfiguraatiot ja palauttaa suorittamattomien tehtävien määrän, saavuttamisaikojen keskiarvon ja tulosmatriisin, jossa suoritetut ja suorittamattomat tehtävät on esitetty soluittain. 7.1 Tarvittava data Simulaatiota varten tarvitaan solujen koordinaatit, korkeudet, keskilämpötilat, lämpötilojen keskihajonnat, keskipaineet, paineiden keskihajonnat, vuosittaisten tehtävämäärien odotusarvot. Lisäksi tarvitaan sairaaloiden koordinaatit, sekä tieto siitä, mihin sairaaloista voidaan kuljettaa potilaita helikopterilla. Säädata on jaettu aamulle, päivälle ja yölle. Kunakin näinä aikana lämpötila ja paine noudattavat omanlaista normaalijakaumaansa. Säätietojen aikaleima oli UTC-ajassa, joten jako aamun, päivän ja yön välillä on tehty seuraavasti (suluissa vastaava aika Suomen normaaliajassa): aamu: klo 4: (6:00-14:00) ilta: klo 12:00 20:00 (14:00 22:00) yö: klo 20:00 4:00 (22:00 6:00) 7.2 Seuraavien tapahtuma-aikojen laskenta Ennen varsinaista simulaatio-osuutta kullekin solulle arvotaan seuraavan tehtävän ajankohta. Odotusarvodata on jaettu erikseen päivä- ja yöodotusarvoihin. Tämä johtuu siitä, että päivisin tapahtumatiheys on suurempi kuin yöllä. Näin ollen päiväajoille ja yöajoille arvotaan molemmille erikseen omat seuraavien tehtävien ajankohdat, jotka saadaan eksponenttijakaumasta. Eksponenttijakauman parametri on seuraavan tapahtuma-ajan odotusarvo, joka saadaan jakamalla vuoden pituus tehtävien määrän odotusarvolla. Eksponenttijakaumasta saadut luvut täytyy tietysti myös muuntaa oikeiksi kellonajoiksi. Jako päivän ja yön välillä on tehtävien odotusarvodatan yhteydessä tehty seuraavasti: yö: klo 22:00 8:00 päivä: klo 8:00 22: Simulaation kulku Simulaatio alustetaan asettamalla aika nollaan. Ajan yksikkönä käytetään minuuttia. Nollahetkeksi valitaan klo 22, koska se on yön alkuhetki (tehtävien odotusarvodatan yhteydessä) ja tällä tavoin muunnokset on helpompi laskea. Simulaatiossa tammikuun oletetaan alkavan nollahetkellä ja kuukaudet vaihtuvat 30,41 vuorokauden välein (365/12). Malli ei siis tässä suhteessa vastaa täysin todellisuutta, mutta asian vaikutus tuloksiin on mitätön. Simulaatiota ajetaan, kunnes aika ylittää vuoden. Ensimmäisenä tutkitaan, missä solussa tapahtuu seuraava tehtävä. Tämä tapahtuu etsimällä seuraavien tapahtuma-aikojen minimi. Solu otetaan muistiin ja aika päivitetään tapahtumahetkeen. Muistiin merkitään myös, onko kyseessä yö- vai päivätehtävä. Seuraavaksi selvitetään, mikä tukikohta on lähimpänä. Lasketaan tukikohtien etäisyydet solusta ja etsitään minimi. Lähimmän tukikohdan helikopteri ei kuitenkaan välttämättä ole käytettävissä. Helikopterin käytettävissä olo tutkitaan tarkastamalla, onko aika ylittänyt ajan, jolloin helikopteri on seuraavan kerran 11

12 käytettävissä. Jos lähimmän tukikohdan helikopteri ei ole käytettävissä, etsitään toiseksi lähin tukikohta, ja jos senkään helikopteri ei ole käytettävissä, kolmanneksi lähin jne. Jos mikään helikopteri ei ole käytettävissä, solun ja tukikohdan välinen etäisyys asetetaan äärettömäksi. Lämpötilalle ja paineelle kussakin solussa on annettu keskilämpötilat ja keskihajonnat erikseen aamulle, päivälle ja yölle kuukausittain. Tehtävän tapahtumishetkellä solulle arvotaan lämpötila ja paine normaalijakaumasta. Tätä varten täytyy selvittää kellonaika ja kuukausi. Näitä säätietoja käytetään helikopterin suorituskyvyn laskennassa. Seuraavaksi simulaatio kutsuu suorituskykymallia antaen parametreiksi tehtävään käytettävän helikopterin tyypin, konfiguraation, lämpötilan, paineen ja korkeuden solussa. Suorituskykymalli laskee helikopterille nopeuden ja kantaman. Lentoaika saadaan jakamalla tukikohdan etäisyys soluun helikopterin nopeudella. Saavuttamisaika on lentoonlähtöön kuluvan ajan, lentoajan ja etsintään ja laskeutumiseen käytettävän ajan summa. Jos saavuttamisaika on suurempi kuin annettu yläraja, tehtävä jää suorittamatta, mikä kirjataan muistiin. Jos mikään helikopteri ei ollut käytettävissä tehtävää varten, solun ja tukikohdan väliseksi etäisyydeksi jäi luku ääretön. Näin saavuttamisajan ylärajoite huomioi tehtävän suorittamattomaksi myös silloin, kun mikään helikopteri ei ole käytettävissä. Jos saavuttamisaika on pienempi kuin annettu alaraja, tehtävä suoritetaan autolla. Tällöin tehtävä kirjataan suoritetuksi ja helikopterin oletetaan olevan poissa käytöstä tietyn vakioajan, joka lääkärillä kestää hoitoreissulla. Myös saavuttamisajat kirjataan muistiin. Autolla suoritetun tehtävän tapauksessa saavuttamisajaksi kirjataan annettu vakio. Jos laskettu saavuttamisaika ei ole liian suuri tai pieni, tarkastellaan vielä, onko solu niin lähellä sairaalaa, että potilas voidaan kuljettaa sairaalaan merkittävästi nopeammin ambulanssilla, kuin että lääkärihelikopteri toisi lääkärin paikalle. Lasketaan sairaaloiden etäisyydet solusta ja etsitään niistä pienin. Jos etäisyys lähimpään sairaalaan on pienempi kuin annettu alaraja, tehtävä jää hoidettavaksi pelkästään ambulanssilla. Tällöin tehtävää ei lasketa suoritetuksi eikä suorittamattomaksi, koska suorittamisvastuu on muulla taholla. Jos solu ei ole lähellä sairaalaa, helikopteri suorittaa tehtävän, mikä kirjataan muistiin, kuten myös saavuttamisaika. Tietyssä osassa tehtävistä potilas joudutaan viemään sairaalaan. Generoidaan satunnaisluku nollan ja ykkösen väliltä. Jos tämä luku on annettua todennäköisyysvakiota pienempi, potilas joudutaan viemään sairaalaan. Sairaalaan vienti ei kuitenkaan ole mahdollista, jos helikopterin kantama ei riitä. Tätä tarkastelua varten lasketaan sairaalan etäisyys tukikohdasta, jolloin saadaan laskettua kokonaislentomatka. Jos kantama riittää, paluuaikaan tulee lentämiseen kuluvan ajan lisäksi kaksi lentoonlähtöä ja laskeutumista, sekä sairaalassa kuluva-aika. Jos kantama ei riitä, potilasta ei voida kuljettaa sairaalaan, mikä merkitään tulosmatriisiin. Tällöin helikopterin paluu tapahtuu suoraa reittiä takaisin tukikohtaan. Tehtävän suorittamiseen kestävä kokonaisaika on saavuttamisaika, potilaan hoitoon kuluva aika ja paluuaika yhteenlaskettuna. Kun tähän lisätään aika, jonka helikopterin valmistelu uutta tehtävää varten kestää, voidaan laskea aika, jolloin helikopteri on seuraavan kerran käytettävissä. Lopuksi on vielä arvottava solulle seuraavan tehtävän ajankohta joko yölle tai päivälle riippuen siitä, kumpana edellä suoritettu tehtävä tapahtui. Tämä tapahtuu samalla tavalla eksponenttifunktion ja aikamuunnoksen avulla kuin alustuksessa. Kun silmukka on suoritettu niin monta kertaa, että vuosi on kulunut, lasketaan vielä suorittamattomien tehtävien prosentuaalinen osuus kaikista tehtävistä ja saavuttamisaikojen keskiarvo. 12

13 8 Suoritusarvojen mallinnus 8.1 Taustaa Tutkimuksen lähtökohdaksi valittiin helikopterin kyky suoriutua kategoria A mukaisesta VTOL (Vertical Take-Off and Landing) menetelmästä[3], jossa helikopterien pitää pystyä suorittamaan nousu ja laskeutuminen pystysuoraan toisen moottorin rikkoutumisesta/tehon menetyksestä huolimatta. Kategoria A rajoittaa mahdolliset helikopterityypit kaksimoottorisiin. Tämän lisäksi vaatimuksien täyttäminen voi vaatia helikopterien lentoonlähtöpainojen rajoittamista. Vaatimus on lähtöisin matkustajaliikenteelle määritetyistä turvallisuusnormeista. Lääkäri- ja lääkintähelikopteritoiminnan voidaan katsoa olevan vielä kriittisempää, koska matkustajan statuksella oleva hoitohenkilöstö käytännössä päättää toisen matkustajan (potilas) kyytiin ottamisesta. Näin ollen potilas voidaan saattaa helikopterin matkustajaksi ilman hänen omaa suostumustaan. Suomen ilmailuviranomainen on toistaiseksi edellyttänyt aiemmin mainittua suorituskykyä sekä tilapäisillä HEMS operointipaikoilla että sairaaloiden helikopterikentillä. HEMS operointipaikoilla käytettävät lentoonlähtö- ja laskeutumisprofiilit ovat poikkeuksetta hitaita ja jyrkkiä, joka korostuu etenkin yöllä toimittaessa, on kysymys matkustajien turvallisuudesta; sekä hoitohenkilöstön työturvallisuudesta että potilasturvallisuudesta. Koska palvelua tarjotaan 7/24 eikä tehtäväpaikka ole ennakolta tiedossa, on perusteltua edellyttää toiminnalta korkeaa turvallisuustasoa. Helikoptereiden käsikirjoista löytyy taulukoita, joista voidaan määrittää sen hetkinen maksimi lentoonlähtöpaino, jolla suoritusarvovaatimukset täyttyvät. Maksimipainot riippuvat ulkoisten olosuhteiden osalta pääsääntöisesti kahdesta määräävästä arvosta, lentopaikan ilmanpaineesta ja lämpötilasta. Ohuemmassa ilmassa roottorin aikaansaama nostovoima heikkenee ja korkeammassa lämpötilassa moottorin maksimiteho laskee. Kun olosuhteet ovat suotuisia ja ulkoisten olosuhteiden osalta suoritusarvot eivät rajoita lentoonlähtömassaa, tulee vastaan jokin muu rakenteellinen rajoitus, jonka perusteella helikopterin lentoonlähtömassa on rajoitettu. 8.2 Painot Helikopterin valmistuessa tehtaalta, sen painoa kutsutaan tyhjämassaksi (Empty weight). Kun tähän lisätään tehtävässä tarvittava varustus, eli lääkärihelikopteritoiminnassa tarvittavat varusteet, kuten paarit, lääkärien istuimet ja lääkintähappijärjestelmät saadaan perustyhjämassa (Basic Empty Weight). Seuraavaksi massaan lisätään lentäjien, lentoavustajan, lääkärin ja potilaan painot. Saadaan kuivaoperointimassa (Dry Operating Mass). Helikopteri on siis kuormattu valmiiksi toimintaa varten, enää tarvitsee lisätä tarvittava polttoaine, jolloin saadaan operointimassa (Operating Mass). Perusoletus on, että helikopterin miehistöön kuuluvat: kaksi ohjaamomiehistön jäsentä (lentäjä ja lentoavustaja tai kaksi lentäjää) ja lääkäri. Miehistönjäsenen painona voidaan käyttää viranomaisen hyväksymää standardipainoa 86 kg. Matkustajan, eli tässä tapauksessa potilaan laskennallisena painona käytetään 100kg. Toinen tutkittava vaihtoehto eroaa perusmallista sillä, että hoitohenkilöstöä on yhden sijasta kaksi. Kolmas vaihtoehto on painavin ja siinä otetaan huomioon mahdollisuus kahden potilaan kuljettamiseen. Eri miehistön kokoonpanoja kutsutaan tässä dokumentissa konfiguraatioiksi. 13

14 Taulukko 1: Helikopterin miehistön mahdolliset kokoonpanot Konfiguraatio Miehistöä Potilaita Massa *86kg+100kg = 338kg *86kg+100kg = 444kg *86kg+2*100kg = 544kg 8.3 Polttoaine Helikopterien polttoainemääriä käsitellään painomitoissa. Näin painolaskelmien teko helpottuu. Säiliöissä olevaa polttoainetta mitataan kiloissa ja polttoaineen kulutusta kilogrammoina tunnissa. Jotta polttoaineen riittävyys saadaan varmistettua, on kaikkien ilma-alusten minimipolttoainemääristä tarkat määräykset. HEMS- toiminnassa olevat helikopterit noudattavat JAR-OPS 3 sääntöjä. Säätöjen mukaan lennolle vaadittava minimipolttoainemäärä on: rullaus (ml. käynnistys) polttoaine, reitin lentämiseen kuluva reittipolttoaine, reittivarapolttoaine, jonka on oltava vähintään 10 % reittipolttoaineesta sekä loppuvarapolttoaine, jota on oltava vähintään 30min lentoaikaa varten. Mittarilentotoiminnassa vaaditaan lisäksi myös polttoaine suunnitellulle varakentälle lentämistä varten. Näin ollen, jos polttoainemäärä ja kulutus tunnetaan, voidaan pisin tehtävässä käytettävä lentoaika määrittää: = ää ä. 30 (1) Suoritusarvotarkastelulla on tarkoitus selvittää pystyykö helikopteri suorittamaan sillä määrätyn lentotehtävän. Kuivaoperointimassa on vakio ja sääolosuhteet sekä sitä vastaava valmistajatehtaan määrittämä maksimilentopaino määrittävät maksimi lentoonlähtöpainon. Näiden erotuksena saadaan mahdollisen mukaan saatavan polttoaineen määrä kilogrammoina. Laskennallisesti tehtävän suoritettavuus selvitetään laskemalla kuinka pitkälle helikopteri pystyisi lentämään suurimmalla mukaan saatavalla polttoainemäärällä. Tämä saadaan lasketuksi vähentämällä olosuhteiden mukaisten suoritusarvojen rajoittamasta maksimi lentoonlähtöpainosta helikopterin kuivaoperointimassa. Käytettävissä oleva lentoaika saadaan laskettua kaavalla (1) ja kun helikopterin lentonopeus tunnetaan, saadaan selvitettyä, riittääkö helikopterin kantama tehtäväpaikalle ja takaisin, sekä maksimi toimintamatka tukikohdasta operointialueelle. 8.4 Laskenta Helikoptereiden suoritusarvodataa ei ollut saatavilla valmiiksi matemaattisessa muodossa, joten ne piti määrittää suoritusarvokäyrästöiltä. Käytännössä tämä toteutettiin katsomalla käyrästöistä riittävä määrä lämpötila painekorkeus pareja ja niitä vastaavia maksimi lentoonlähtömassoja. Näihin pisteisiin sovitettiin paloittain lineaarinen tai neliöllinen funktio, jolla pystyy suoraan selvittämään helikopterin suorituskyvyn eri olosuhteissa. Suorituskyvyn ja maksimilentomatkojen laskemiseksi tarvittiin myös muuta dataa. Helikoptereiden perustyhjämassat, polttoainekulutukset, reittilentonopeudet ja maksimi polttoainekuormat saatiin kaikista tutkittavista helikopterityypeistä. Reittilentonopeudet ja polttoaineenkulutukset riippuvat todellisuudessa olosuhteista, mutta koska erot ovat muutaman prosentin luokkaa ja vaikutus kaikilla tyypeillä on samansuuntainen, on ne voitu arvioida vakioiksi. 14

15 Kuva 4: Esimerkki helikopterin suoritusarvokäyristä, CAT A VTOL 310 Paras reittilentonopeus km/h Helikopterityyppi Kuva 5: helikopterityyppien parhaat reittilentonopeudet 15

16 9 Tulokset Lopullisissa laskennoissa käytettiin hakualgoritmin populaation minimikokona pääosin arvoa 30 ja sukupolvien määränä pääosin arvoa 150. Laskenta suoritettiin rinnakkaislaskentana Teknillisen korkeakoulun päärakennuksen luokan U122 tietokoneilla, joissa oli Intel Core 2 Quad 2.66 GHz prosessorit. Yksi simulaatio näillä koneilla kesti noin 3.5 sekuntia ja yksi kokonainen hakuajo noin neljä tuntia. Yksi hakuajo kävi läpi noin eri tukikohta- ja helikopterityyppien yhdistelmää. Hakualgoritmin eteneminen on esitetty kuvassa 7. Kuvasta näkyy erikseen ratkaisut kummankin tavoitteen suhteen, joten se ei kuvaa hakualgoritmin etenemistä kompromissiratkaisujen osalta, mutta niidenkin voidaan olettaa etenevän jotakuinkin samaa tahtia. Nähdään, että sukupolven vaiheilla haku on jo melkein vakiintunut ja vain pieniä parannuksia tapahtuu sen jälkeen. Hyvyysarvojen keskihajonta löydettyjen paretooptimaalisten ratkaisujen kasvaessa hieman laskee, mutta pysyy kuitenkin melko korkeana, kuten tarkoituksena, jotta juuttuminen lokaaleihin optimeihin vältettäisiin. Kuva 6: Hakualgoritmin eteneminen tavoitteiden suhteen sukupolven funktiona. Ylemmissä kuvissa vihreillä pystyviivoilla populaation hyvyysarvojen vaihteluväli ja sinisellä viivalla näiden keskiarvo. Alemmissa kuvissa hyvyysarvojen keskihajonta. 16

17 9.1 Tulosten herkkyys satunnaisuudelle Sekä yksittäinen simulaatio että hakualgoritmi olivat luonteeltaan stokastisia ja jokaisen ajokerran tulos siten hieman erilainen. Suuresta laskenta-ajasta johtuen ei ollut mahdollista tehdä useita toistoja, joista olisi ottanut keskiarvot lopulliseksi tulokseksi, vaan tyydyimme tutkimaan satunnaisuuden vaikutusta tulosten hajontaan ja vaikutusta johtopäätöksiin. Kuvissa 8 ja 9 on esitetty useiden eri simulaatioiden ja hakuajojen tulosten hajonta. Simulaation hajontaa voidaan verrata esimerkiksi hakualgoritmin hajontakuvaan ja todeta, että sillä on jotain vaikutusta yksittäisten samankaltaisten ratkaisujen välisen paremmuuden suhteen, mutta tarkastelemalla jäljemmin esitettäviä vertailukuvaajia voidaan todeta, että suurempiin periaatteellisin johtopäätöksiin sillä ei ole vaikutusta. Tavoitteena ei ole ollut löytää yhtä parasta ratkaisua, vaan tutkia mitä yhteistä parhailla ratkaisuilla on ja näihin johtopäätöksiin simulaation hajonnalla on vähäinen vaikutus. Hakualgoritmin hajonta on hyvin vähäinen. Pareto-optimaalisten ratkaisujen joukkojen hienoiset erot saattavat johtua suurelta osin simulaation hajonnasta. Eri ajoilla hakualgoritmi on löytänyt hieman vaihtelevalla tiheydellä ratkaisuja paretopinnalta, mutta kummankin tavoitteen ääriarvot ovat eri ajoilla hyvin lähellä toisiaan ja pistejoukon muoto on hyvin samanlainen. Kuva 7: Sadan eri nykytilanteen simulaation tulokset tavoitemittarien avaruudessa 17

18 Kuva 8: Neljän samoilla parametreilla tehdyn eri hakuajon pareto-optimaalisten ratkaisujen joukot 9.2 Nykytilanne Nykyisin tukikohtia on kuusi ja ne sijaitsevat Helsinki-Vantaalla, Joroisissa, Vaasassa, Turussa, Oulussa ja Sodankylässä. Kuvassa 10 on esitetty nykytilanteen tukikohdilla ja helikopterityypeillä simuloitujen suoritettujen ja suorittamattomien tehtävien maantieteellinen jakautuminen. Tehtävien osalta mielenkiintoista on tarkastella suorittamattomien tehtävien sijaintia ja sitä kuinka suuri osa niistä johtuu sijainnista helikopterien kantama-alueiden ulkopuolella ja kuinka suuri osa päällekkäistehtävistä tiheään asutuilla alueilla helikopterien kantama-alueiden sisäpuolella. Näin voidaan arvioida tulisiko palvelutasoa parantaakseen parantaa alueellista kattavuutta vai sijoittaa tukikohtia tiheämmin tiheään asutuille alueille, tai helikopterityyppien kannalta, kannattaisiko käyttää helikoptereita joilla voidaan lentää kauas vai helikoptereita, joilla voidaan lentää nopeasti lähelle. Kuvista nähdään että suorittamattomia tehtäviä on erityisen paljon kantama-alueiden välissä Keski-Suomessa sekä kantama-alueiden sisällä Pääkaupunkiseudun, Lahden, Turun ja Tampereen alueilla. Suorittamattomista tehtävistä yhteensä 68 % sijaitsee kantama-alueiden sisällä ja 32 % ulkopuolella. 18

19 Kuva 9: Suoritettujen (vasemmalla) ja suorittamatta jääneiden (oikealla) tehtävien simuloitu maantieteellinen jakautuminen nykytilanteessa (kappaletta vuodessa per hilan solu) 9.3 Tukikohta-kombinaatioiden tarkastelu Hankkeen yksi tavoite on selvittää, mihin päin Suomea helikopteritukikohdat kannattaa sijoittaa. Tarkastellaan, mitä tukikohtia simulaatiossa saatuihin pareto-optimaalisiin kombinaatioihin tuli, kun tukikohtien määräksi asetetaan kuusi ja käytetään konfiguraatiota 1. Nämä valinnat tehdään siksi, että nykyään Suomessa on käytössä kuusi tukikohtaa ja konfiguraatio on useimpien helikoptereiden kohdalla 1, mutta sama tarkastelu voitaisiin yhtä hyvin tehdä muillakin tukikohta määrillä ja konfiguraatioilla. Tässä tarkastelussa ei keskitytä siihen, mitä helikopterityyppejä tukikohtiin tulee, joten otetaan rajoitukseksi, että helikopterityyppi on jokaisessa tukikohdassa sama. Simulaatiosta saatu pareto-optimaalinen pinta on esitetty kuvassa

20 Kuva 10: Pareto-pinta (6 tukikohtaa; konfiguraatio 1; jokaisessa tukikohdassa sama helikopteri), violetti timantti kuvaa kombinaatiota yliopistolliset sairaalat + Sodankylä, kolmio kuvaa nykytilannetta Kuva 11: Paras kombinaatio tavoittamisaikojen suhteen 20

Lääkintähelikopterikaluston mallintaminen
 Mat-2.4177 Operaatiotutkimuksen projektityöseminaari Lääkintähelikopterikaluston mallintaminen Väliraportti 19.3.2010 Pohjalainen Tapio (projektipäällikkö) (29157N) Kuikka Ilmari (58634A) Tyrväinen Tero
Mat-2.4177 Operaatiotutkimuksen projektityöseminaari Lääkintähelikopterikaluston mallintaminen Väliraportti 19.3.2010 Pohjalainen Tapio (projektipäällikkö) (29157N) Kuikka Ilmari (58634A) Tyrväinen Tero
HEMS-yksiköiden sijoittaminen. 6.5.2010 HEMS hallinnointiyksikköhanke
 HEMS-yksiköiden sijoittaminen 6.5.2010 HEMS hallinnointiyksikköhanke 1 Problematiikka Ensihoidossa ei ole määritelty Arvoja Normeja Tavoitteita Vaihtoehtoiset tavoitteet Nopeasti, mutta vähemmän väestöä
HEMS-yksiköiden sijoittaminen 6.5.2010 HEMS hallinnointiyksikköhanke 1 Problematiikka Ensihoidossa ei ole määritelty Arvoja Normeja Tavoitteita Vaihtoehtoiset tavoitteet Nopeasti, mutta vähemmän väestöä
Lääkintähelikopterikaluston mallintaminen
 Mat-2.4177 Operaatiotutkimuksen projektityöseminaari Lääkintähelikopterikaluston mallintaminen Projektisuunnitelma 19.2.2010 Pohjalainen Tapio (projektipäällikkö) Kuikka Ilmari Tyrväinen Tero Salomaa Osmo
Mat-2.4177 Operaatiotutkimuksen projektityöseminaari Lääkintähelikopterikaluston mallintaminen Projektisuunnitelma 19.2.2010 Pohjalainen Tapio (projektipäällikkö) Kuikka Ilmari Tyrväinen Tero Salomaa Osmo
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta. Yliassistentti Jussi Hakanen syksy 2010
 TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Evoluutiopohjainen monitavoiteoptimointi MCDM ja EMO Monitavoiteoptimointi kuuluu
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Evoluutiopohjainen monitavoiteoptimointi MCDM ja EMO Monitavoiteoptimointi kuuluu
Algoritmit 2. Luento 12 To Timo Männikkö
 Algoritmit 2 Luento 12 To 3.5.2018 Timo Männikkö Luento 12 Geneettiset algoritmit Simuloitu jäähdytys Merkkijonon sovitus Horspoolin algoritmi Algoritmit 2 Kevät 2018 Luento 12 To 3.5.2018 2/35 Algoritmien
Algoritmit 2 Luento 12 To 3.5.2018 Timo Männikkö Luento 12 Geneettiset algoritmit Simuloitu jäähdytys Merkkijonon sovitus Horspoolin algoritmi Algoritmit 2 Kevät 2018 Luento 12 To 3.5.2018 2/35 Algoritmien
Algoritmit 2. Luento 13 Ti Timo Männikkö
 Algoritmit 2 Luento 13 Ti 30.4.2019 Timo Männikkö Luento 13 Simuloitu jäähdytys Merkkijonon sovitus Horspoolin algoritmi Ositus ja rekursio Rekursion toteutus Algoritmit 2 Kevät 2019 Luento 13 Ti 30.4.2019
Algoritmit 2 Luento 13 Ti 30.4.2019 Timo Männikkö Luento 13 Simuloitu jäähdytys Merkkijonon sovitus Horspoolin algoritmi Ositus ja rekursio Rekursion toteutus Algoritmit 2 Kevät 2019 Luento 13 Ti 30.4.2019
Juuri 10 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty
 Juuri 0 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 9..08 Kertaus K. a) Alapaineiden pienin arvo on ja suurin arvo 74, joten vaihteluväli on [, 74]. b) Alapaineiden keskiarvo on 6676870774
Juuri 0 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 9..08 Kertaus K. a) Alapaineiden pienin arvo on ja suurin arvo 74, joten vaihteluväli on [, 74]. b) Alapaineiden keskiarvo on 6676870774
Algoritmit 2. Luento 12 Ke Timo Männikkö
 Algoritmit 2 Luento 12 Ke 26.4.2017 Timo Männikkö Luento 12 Rajoitehaku Kauppamatkustajan ongelma Lyhin virittävä puu Paikallinen etsintä Vaihtoalgoritmit Geneettiset algoritmit Simuloitu jäähdytys Algoritmit
Algoritmit 2 Luento 12 Ke 26.4.2017 Timo Männikkö Luento 12 Rajoitehaku Kauppamatkustajan ongelma Lyhin virittävä puu Paikallinen etsintä Vaihtoalgoritmit Geneettiset algoritmit Simuloitu jäähdytys Algoritmit
Geneettiset algoritmit
 Geneettiset algoritmit Evoluution piirteitä laskennassa Optimoinnin perusteet - Kevät 2002 / 1 Sisältö Geneettisten algoritmien sovelluskenttä Peruskäsitteitä Esimerkkejä funktion ääriarvon etsintä vangin
Geneettiset algoritmit Evoluution piirteitä laskennassa Optimoinnin perusteet - Kevät 2002 / 1 Sisältö Geneettisten algoritmien sovelluskenttä Peruskäsitteitä Esimerkkejä funktion ääriarvon etsintä vangin
Lääkärihelikopteritoiminta
 Lääkärihelikopteritoiminta Jorma Penttinen, hallituksen puheenjohtaja FinnHEMS Oy Lääkäri- ja pelastushelikopteritoiminta Työryhmäraportti 4.12.2007 Hallinnointiyksikkö: STM + YO-SHP:t Lääkäriyksikkö Ei
Lääkärihelikopteritoiminta Jorma Penttinen, hallituksen puheenjohtaja FinnHEMS Oy Lääkäri- ja pelastushelikopteritoiminta Työryhmäraportti 4.12.2007 Hallinnointiyksikkö: STM + YO-SHP:t Lääkäriyksikkö Ei
Koko maan ilveskanta-arvion taustasta ja erityisesti Etelä-Hämeen arviosta. Tiedosta ratkaisuja kestäviin valintoihin
 Koko maan ilveskanta-arvion taustasta ja erityisesti Etelä-Hämeen arviosta Tiedosta ratkaisuja kestäviin valintoihin Erillislaskentojen pentuetulos talvi 2012/2013 Ensimmäinen tieto lehdistössä Pentueet
Koko maan ilveskanta-arvion taustasta ja erityisesti Etelä-Hämeen arviosta Tiedosta ratkaisuja kestäviin valintoihin Erillislaskentojen pentuetulos talvi 2012/2013 Ensimmäinen tieto lehdistössä Pentueet
Kombinatorinen optimointi
 Kombinatorinen optimointi Sallittujen pisteiden lukumäärä on äärellinen Periaatteessa ratkaisu löydetään käymällä läpi kaikki pisteet Käytännössä lukumäärä on niin suuri, että tämä on mahdotonta Usein
Kombinatorinen optimointi Sallittujen pisteiden lukumäärä on äärellinen Periaatteessa ratkaisu löydetään käymällä läpi kaikki pisteet Käytännössä lukumäärä on niin suuri, että tämä on mahdotonta Usein
S-114.2720 Havaitseminen ja toiminta
 S-114.2720 Havaitseminen ja toiminta Heikki Hyyti 60451P Harjoitustyö 2 visuaalinen prosessointi Treismanin FIT Kuva 1. Kuvassa on Treismanin kokeen ensimmäinen osio, jossa piti etsiä vihreätä T kirjainta.
S-114.2720 Havaitseminen ja toiminta Heikki Hyyti 60451P Harjoitustyö 2 visuaalinen prosessointi Treismanin FIT Kuva 1. Kuvassa on Treismanin kokeen ensimmäinen osio, jossa piti etsiä vihreätä T kirjainta.
ASUINKERROSTALON ÄÄNITEKNISEN LAADUN ARVIOINTI. Mikko Kylliäinen
 ASUINKERROSTALON ÄÄNITEKNISEN LAADUN ARVIOINTI Mikko Kylliäinen Insinööritoimisto Heikki Helimäki Oy Dagmarinkatu 8 B 18, 00100 Helsinki kylliainen@kotiposti.net 1 JOHDANTO Suomen rakentamismääräyskokoelman
ASUINKERROSTALON ÄÄNITEKNISEN LAADUN ARVIOINTI Mikko Kylliäinen Insinööritoimisto Heikki Helimäki Oy Dagmarinkatu 8 B 18, 00100 Helsinki kylliainen@kotiposti.net 1 JOHDANTO Suomen rakentamismääräyskokoelman
GeoGebra tutkivan oppimisen välineenä: havainto-hypoteesi-testaus
 GeoGebra tutkivan oppimisen välineenä: havainto-hypoteesi-testaus Mitä jäi mieleen viime viikosta? Mitä mieltä olet tehtävistä, joissa GeoGebralla työskentely yhdistetään paperilla jaettaviin ohjeisiin
GeoGebra tutkivan oppimisen välineenä: havainto-hypoteesi-testaus Mitä jäi mieleen viime viikosta? Mitä mieltä olet tehtävistä, joissa GeoGebralla työskentely yhdistetään paperilla jaettaviin ohjeisiin
MAB3 - Harjoitustehtävien ratkaisut:
 MAB - Harjoitustehtävien ratkaisut: Funktio. Piirretään koordinaatistoakselit ja sijoitetaan pisteet:. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä. Funktiolla
MAB - Harjoitustehtävien ratkaisut: Funktio. Piirretään koordinaatistoakselit ja sijoitetaan pisteet:. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä. Funktiolla
MAB3 - Harjoitustehtävien ratkaisut:
 MAB3 - Harjoitustehtävien ratkaisut: 1 Funktio 1.1 Piirretään koordinaatistoakselit ja sijoitetaan pisteet: 1 1. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä.
MAB3 - Harjoitustehtävien ratkaisut: 1 Funktio 1.1 Piirretään koordinaatistoakselit ja sijoitetaan pisteet: 1 1. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä.
Monitavoitteiseen optimointiin soveltuvan evoluutioalgoritmin tarkastelu
 Monitavoitteiseen optimointiin soveltuvan evoluutioalgoritmin tarkastelu (Valmiin työn esittely) 11.4.2011 Ohjaaja: Ville Mattila Valvoja: Raimo Hämäläinen Työn tavoite Tutkia evoluutioalgoritmia (Lee
Monitavoitteiseen optimointiin soveltuvan evoluutioalgoritmin tarkastelu (Valmiin työn esittely) 11.4.2011 Ohjaaja: Ville Mattila Valvoja: Raimo Hämäläinen Työn tavoite Tutkia evoluutioalgoritmia (Lee
Kimppu-suodatus-menetelmä
 Kimppu-suodatus-menetelmä 2. toukokuuta 2016 Kimppu-suodatus-menetelmä on kehitetty epäsileiden optimointitehtävien ratkaisemista varten. Menetelmässä approksimoidaan epäsileitä funktioita aligradienttikimpulla.
Kimppu-suodatus-menetelmä 2. toukokuuta 2016 Kimppu-suodatus-menetelmä on kehitetty epäsileiden optimointitehtävien ratkaisemista varten. Menetelmässä approksimoidaan epäsileitä funktioita aligradienttikimpulla.
Arkkitehtuurien tutkimus Outi Räihä. OHJ-3200 Ohjelmistoarkkitehtuurit. Darwin-projekti. Johdanto
 OHJ-3200 Ohjelmistoarkkitehtuurit 1 Arkkitehtuurien tutkimus Outi Räihä 2 Darwin-projekti Darwin-projekti: Akatemian rahoitus 2009-2011 Arkkitehtuurisuunnittelu etsintäongelmana Geneettiset algoritmit
OHJ-3200 Ohjelmistoarkkitehtuurit 1 Arkkitehtuurien tutkimus Outi Räihä 2 Darwin-projekti Darwin-projekti: Akatemian rahoitus 2009-2011 Arkkitehtuurisuunnittelu etsintäongelmana Geneettiset algoritmit
PYHTÄÄN KUNTA RUOTSINPYHTÄÄN KUNTA
 Liite 16 PYHTÄÄN KUNTA RUOTSINPYHTÄÄN KUNTA VT 7 MELUALUEEN LEVEYS 6.10.2005 SUUNNITTELUKESKUS OY RAPORTTI Turku / M. Sairanen VT 7, melualueen leveys 6.10.2005 SISÄLLYSLUETTELO 1. JOHDANTO... 1 2. LASKENNAN
Liite 16 PYHTÄÄN KUNTA RUOTSINPYHTÄÄN KUNTA VT 7 MELUALUEEN LEVEYS 6.10.2005 SUUNNITTELUKESKUS OY RAPORTTI Turku / M. Sairanen VT 7, melualueen leveys 6.10.2005 SISÄLLYSLUETTELO 1. JOHDANTO... 1 2. LASKENNAN
etunimi, sukunimi ja opiskelijanumero ja näillä
 Sisällys 1. Algoritmi Algoritmin määritelmä. Aiheen pariin johdatteleva esimerkki. ja operaatiot (sijoitus, aritmetiikka ja vertailu). Algoritmista ohjelmaksi. 1.1 1.2 Algoritmin määritelmä Ohjelmointi
Sisällys 1. Algoritmi Algoritmin määritelmä. Aiheen pariin johdatteleva esimerkki. ja operaatiot (sijoitus, aritmetiikka ja vertailu). Algoritmista ohjelmaksi. 1.1 1.2 Algoritmin määritelmä Ohjelmointi
Vuokratietojen imputointi SISU -aineistoon
 Vuokratietojen imputointi SISU -aineistoon Sisällys 1 AINEISTON LÄHTÖTILANNE JA IMPUTOINTI.... 3 1.1 Aineiston asuntokunnat ja asumistukirekisteri...3 1.2 Tietojen imputointimenetelmä........................................
Vuokratietojen imputointi SISU -aineistoon Sisällys 1 AINEISTON LÄHTÖTILANNE JA IMPUTOINTI.... 3 1.1 Aineiston asuntokunnat ja asumistukirekisteri...3 1.2 Tietojen imputointimenetelmä........................................
GA & robot path planning. Janne Haapsaari AUTO Geneettiset algoritmit
 GA & robot path planning Janne Haapsaari AUTO3070 - Geneettiset algoritmit GA robotiikassa Sovelluksia liikkeen optimoinnissa: * eri vapausasteisten robottien liikeratojen optimointi * autonomisten robottien
GA & robot path planning Janne Haapsaari AUTO3070 - Geneettiset algoritmit GA robotiikassa Sovelluksia liikkeen optimoinnissa: * eri vapausasteisten robottien liikeratojen optimointi * autonomisten robottien
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 2017 Insinöörivalinnan matematiikan koe , Ratkaisut (Sarja A)
") Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 017 Insinöörivalinnan matematiikan koe 30..017, Ratkaisut (Sarja A) 1. a) Lukujen 9, 0, 3 ja x keskiarvo on. Määritä x. (1 p.) b) Mitkä reaaliluvut
Diplomi-insinööri- ja arkkitehtikoulutuksen yhteisvalinta 017 Insinöörivalinnan matematiikan koe 30..017, Ratkaisut (Sarja A) 1. a) Lukujen 9, 0, 3 ja x keskiarvo on. Määritä x. (1 p.) b) Mitkä reaaliluvut
Harjoitus 6 ( )
") Harjoitus 6 (30.4.2014) Tehtävä 1 Määritelmän (ks. luentomoniste s. 109) mukaan yleisen, muotoa min f(x) s.t. g(x) 0 h(x) = 0 x X (1) olevan optimointitehtävän Lagrangen duaali on max θ(u,v) s.t. u 0,
Harjoitus 6 (30.4.2014) Tehtävä 1 Määritelmän (ks. luentomoniste s. 109) mukaan yleisen, muotoa min f(x) s.t. g(x) 0 h(x) = 0 x X (1) olevan optimointitehtävän Lagrangen duaali on max θ(u,v) s.t. u 0,
Jatkuvat satunnaismuuttujat
 Jatkuvat satunnaismuuttujat Satunnaismuuttuja on jatkuva jos se voi ainakin periaatteessa saada kaikkia mahdollisia reaalilukuarvoja ainakin tietyltä väliltä. Täytyy ymmärtää, että tällä ei ole mitään
Jatkuvat satunnaismuuttujat Satunnaismuuttuja on jatkuva jos se voi ainakin periaatteessa saada kaikkia mahdollisia reaalilukuarvoja ainakin tietyltä väliltä. Täytyy ymmärtää, että tällä ei ole mitään
Optimaalisen tarkastusvälin määrittäminen suun terveydenhuollossa
 Projektin väliraportti Optimaalisen tarkastusvälin määrittäminen suun terveydenhuollossa 13.4.2012 Mat-2.4117 Operaatiotutkimuksen projektityöseminaari Toimeksiantaja: Nordic Healthcare Group Projektiryhmä:
Projektin väliraportti Optimaalisen tarkastusvälin määrittäminen suun terveydenhuollossa 13.4.2012 Mat-2.4117 Operaatiotutkimuksen projektityöseminaari Toimeksiantaja: Nordic Healthcare Group Projektiryhmä:
7. laskuharjoituskierros, vko 10, ratkaisut
 7. laskuharjoituskierros, vko 10, ratkaisut D1. a) Oletetaan, että satunnaismuuttujat X ja Y noudattavat kaksiulotteista normaalijakaumaa parametrein E(X) = 0, E(Y ) = 1, Var(X) = 1, Var(Y ) = 4 ja Cov(X,
7. laskuharjoituskierros, vko 10, ratkaisut D1. a) Oletetaan, että satunnaismuuttujat X ja Y noudattavat kaksiulotteista normaalijakaumaa parametrein E(X) = 0, E(Y ) = 1, Var(X) = 1, Var(Y ) = 4 ja Cov(X,
Harjoitus 6 ( )
") Harjoitus 6 (21.4.2015) Tehtävä 1 Määritelmän (ks. luentomoniste s. 109) mukaan yleisen, muotoa min f(x) s. t. g(x) 0 h(x) = 0 x X olevan optimointitehtävän Lagrangen duaali on missä max θ(u, v) s. t.
Harjoitus 6 (21.4.2015) Tehtävä 1 Määritelmän (ks. luentomoniste s. 109) mukaan yleisen, muotoa min f(x) s. t. g(x) 0 h(x) = 0 x X olevan optimointitehtävän Lagrangen duaali on missä max θ(u, v) s. t.
Seguinin lauta A: 11-19
 Lukujen syventäminen Kun lapsi ryhtyy montessorileikkikoulussa syventämään tietouttaan lukualueesta 1-1000, uutena montessorimateriaalina tulevat värihelmet. Värihelmet johdattavat lasta mm. laskutoimituksiin,
Lukujen syventäminen Kun lapsi ryhtyy montessorileikkikoulussa syventämään tietouttaan lukualueesta 1-1000, uutena montessorimateriaalina tulevat värihelmet. Värihelmet johdattavat lasta mm. laskutoimituksiin,
1. OHJAAMATON OPPIMINEN JA KLUSTEROINTI
 1. OHJAAMATON OPPIMINEN JA KLUSTEROINTI 1 1.1 Funktion optimointiin perustuvat klusterointialgoritmit Klusteroinnin onnistumista mittaavan funktion J optimointiin perustuvissa klusterointialgoritmeissä
1. OHJAAMATON OPPIMINEN JA KLUSTEROINTI 1 1.1 Funktion optimointiin perustuvat klusterointialgoritmit Klusteroinnin onnistumista mittaavan funktion J optimointiin perustuvissa klusterointialgoritmeissä
Mat Sovellettu todennäköisyyslasku A
 TKK / Systeemianalyysin laboratorio Nordlund Mat-.090 Sovellettu todennäköisyyslasku A Harjoitus 7 (vko 44/003) (Aihe: odotusarvon ja varianssin ominaisuuksia, satunnaismuuttujien lineaarikombinaatioita,
TKK / Systeemianalyysin laboratorio Nordlund Mat-.090 Sovellettu todennäköisyyslasku A Harjoitus 7 (vko 44/003) (Aihe: odotusarvon ja varianssin ominaisuuksia, satunnaismuuttujien lineaarikombinaatioita,
Ongelma 1: Ovatko kaikki tehtävät/ongelmat deterministisiä?
 Ongelma 1: Ovatko kaikki tehtävät/ongelmat deterministisiä? 2013-2014 Lasse Lensu 2 Ongelma 2: Milloin ongelmat muuttuvat oikeasti hankaliksi? 2013-2014 Lasse Lensu 3 Ongelma 3: Miten hankalia ongelmia
Ongelma 1: Ovatko kaikki tehtävät/ongelmat deterministisiä? 2013-2014 Lasse Lensu 2 Ongelma 2: Milloin ongelmat muuttuvat oikeasti hankaliksi? 2013-2014 Lasse Lensu 3 Ongelma 3: Miten hankalia ongelmia
Malliratkaisut Demot
 Malliratkaisut Demot 1 23.1.2017 1. Päätösmuuttujiksi voidaan valita x 1 : tehtyjen peruspöytin lukumäärä x 2 : tehtyjen luxuspöytien lukumäärä. Optimointitehtäväksi tulee max 200x 1 + 350x 2 s. t. 5x
Malliratkaisut Demot 1 23.1.2017 1. Päätösmuuttujiksi voidaan valita x 1 : tehtyjen peruspöytin lukumäärä x 2 : tehtyjen luxuspöytien lukumäärä. Optimointitehtäväksi tulee max 200x 1 + 350x 2 s. t. 5x
Luku 6. Dynaaminen ohjelmointi. 6.1 Funktion muisti
 Luku 6 Dynaaminen ohjelmointi Dynaamisessa ohjelmoinnissa on ideana jakaa ongelman ratkaisu pienempiin osaongelmiin, jotka voidaan ratkaista toisistaan riippumattomasti. Jokaisen osaongelman ratkaisu tallennetaan
Luku 6 Dynaaminen ohjelmointi Dynaamisessa ohjelmoinnissa on ideana jakaa ongelman ratkaisu pienempiin osaongelmiin, jotka voidaan ratkaista toisistaan riippumattomasti. Jokaisen osaongelman ratkaisu tallennetaan
Implementation of Selected Metaheuristics to the Travelling Salesman Problem (valmiin työn esittely)
") Implementation of Selected Metaheuristics to the Travelling Salesman Problem (valmiin työn esittely) Jari Hast xx.12.2013 Ohjaaja: Harri Ehtamo Valvoja: Hari Ehtamo Työn saa tallentaa ja julkistaa Aalto-yliopiston
Implementation of Selected Metaheuristics to the Travelling Salesman Problem (valmiin työn esittely) Jari Hast xx.12.2013 Ohjaaja: Harri Ehtamo Valvoja: Hari Ehtamo Työn saa tallentaa ja julkistaa Aalto-yliopiston
Ei välttämättä, se voi olla esimerkiksi Reuleaux n kolmio:
 Inversio-ongelmista Craig, Brown: Inverse problems in astronomy, Adam Hilger 1986. Havaitaan oppositiossa olevaa asteroidia. Pyörimisestä huolimatta sen kirkkaus ei muutu. Projisoitu pinta-ala pysyy ilmeisesti
Inversio-ongelmista Craig, Brown: Inverse problems in astronomy, Adam Hilger 1986. Havaitaan oppositiossa olevaa asteroidia. Pyörimisestä huolimatta sen kirkkaus ei muutu. Projisoitu pinta-ala pysyy ilmeisesti
2009 Mat-2.4177 Operaatiotutkimuksen Projektityöseminaari L
 2009 Mat-2.4177 Operaatiotutkimuksen Projektityöseminaari L Väliraportti 25.2.2009 Puustokuvioiden korjuukelpoisuus- ja saavutettavuusanalyysi Juha Valvanne Juho Matikainen Joni Nurmentaus Lasse Östring
2009 Mat-2.4177 Operaatiotutkimuksen Projektityöseminaari L Väliraportti 25.2.2009 Puustokuvioiden korjuukelpoisuus- ja saavutettavuusanalyysi Juha Valvanne Juho Matikainen Joni Nurmentaus Lasse Östring
Aluksi. 1.1. Kahden muuttujan lineaarinen yhtälö
 Aluksi Matematiikan käsite suora on tarkalleen sama asia kuin arkikielen suoran käsite. Vai oliko se toisinpäin? Matematiikan luonteesta johtuu, että sen soveltaja ei tyydy pelkkään suoran nimeen eikä
Aluksi Matematiikan käsite suora on tarkalleen sama asia kuin arkikielen suoran käsite. Vai oliko se toisinpäin? Matematiikan luonteesta johtuu, että sen soveltaja ei tyydy pelkkään suoran nimeen eikä
Esimerkki 1: auringonkukan kasvun kuvailu
 GeoGebran LASKENTATAULUKKO Esimerkki 1: auringonkukan kasvun kuvailu Auringonkukka (Helianthus annuus) on yksivuotinen kasvi, jonka varren pituus voi aurinkoisina kesinä hyvissä kasvuolosuhteissa Suomessakin
GeoGebran LASKENTATAULUKKO Esimerkki 1: auringonkukan kasvun kuvailu Auringonkukka (Helianthus annuus) on yksivuotinen kasvi, jonka varren pituus voi aurinkoisina kesinä hyvissä kasvuolosuhteissa Suomessakin
SIIVOJA HALLITSEE EKG-REKISTERÖINNIN, VAIKKA SE ON VAIKEAA JOPA KLIINISEN FYSIOLOGIAN ERIKOISHOITAJILLE!
 Hanna-Maarit Riski Yliopettaja Turun ammattikorkeakoulu SIIVOJA HALLITSEE EKG-REKISTERÖINNIN, VAIKKA SE ON VAIKEAA JOPA KLIINISEN FYSIOLOGIAN ERIKOISHOITAJILLE! JOHDANTO Iltasanomissa 17.3.2011 oli artikkeli,
Hanna-Maarit Riski Yliopettaja Turun ammattikorkeakoulu SIIVOJA HALLITSEE EKG-REKISTERÖINNIN, VAIKKA SE ON VAIKEAA JOPA KLIINISEN FYSIOLOGIAN ERIKOISHOITAJILLE! JOHDANTO Iltasanomissa 17.3.2011 oli artikkeli,
Vanhankaupunginkosken ultraäänikuvaukset Simsonar Oy Pertti Paakkolanvaara
 Vanhankaupunginkosken ultraäänikuvaukset 15.7. 14.11.2014 Simsonar Oy Pertti Paakkolanvaara Avaintulokset 2500 2000 Ylös vaellus pituusluokittain: 1500 1000 500 0 35-45 cm 45-60 cm 60-70 cm >70 cm 120
Vanhankaupunginkosken ultraäänikuvaukset 15.7. 14.11.2014 Simsonar Oy Pertti Paakkolanvaara Avaintulokset 2500 2000 Ylös vaellus pituusluokittain: 1500 1000 500 0 35-45 cm 45-60 cm 60-70 cm >70 cm 120
Algoritmit 1. Luento 10 Ke Timo Männikkö
 Algoritmit 1 Luento 10 Ke 14.2.2018 Timo Männikkö Luento 10 Algoritminen ongelmanratkaisu Suunnittelumenetelmät Raaka voima Järjestäminen eli lajittelu Kuplalajittelu Lisäyslajittelu Valintalajittelu Permutaatiot
Algoritmit 1 Luento 10 Ke 14.2.2018 Timo Männikkö Luento 10 Algoritminen ongelmanratkaisu Suunnittelumenetelmät Raaka voima Järjestäminen eli lajittelu Kuplalajittelu Lisäyslajittelu Valintalajittelu Permutaatiot
Arvio hallituksen talousarvioesityksessä ehdottaman osinkoveromallin vaikutuksista yrittäjien veroasteisiin
 Liitemuistio, 4.9.213 Arvio hallituksen talousarvioesityksessä ehdottaman osinkoveromallin vaikutuksista yrittäjien veroasteisiin Sami Grönberg, Seppo Kari ja Olli Ropponen, VATT 1 Verotukseen ehdotetut
Liitemuistio, 4.9.213 Arvio hallituksen talousarvioesityksessä ehdottaman osinkoveromallin vaikutuksista yrittäjien veroasteisiin Sami Grönberg, Seppo Kari ja Olli Ropponen, VATT 1 Verotukseen ehdotetut
Otoskoko 107 kpl. a) 27 b) 2654
 27 b) 2654") 1. Tietyllä koneella valmistettavien tiivisterenkaiden halkaisijan keskihajonnan tiedetään olevan 0.04 tuumaa. Kyseisellä koneella valmistettujen 100 renkaan halkaisijoiden keskiarvo oli 0.60 tuumaa. Määrää
1. Tietyllä koneella valmistettavien tiivisterenkaiden halkaisijan keskihajonnan tiedetään olevan 0.04 tuumaa. Kyseisellä koneella valmistettujen 100 renkaan halkaisijoiden keskiarvo oli 0.60 tuumaa. Määrää
1. OHJAAMATON OPPIMINEN JA KLUSTEROINTI
 1. OHJAAMATON OPPIMINEN JA KLUSTEROINTI 1 1.1 Funktion optimointiin perustuvat klusterointialgoritmit Klusteroinnin onnistumista mittaavan funktion J optimointiin perustuvissa klusterointialgoritmeissä
1. OHJAAMATON OPPIMINEN JA KLUSTEROINTI 1 1.1 Funktion optimointiin perustuvat klusterointialgoritmit Klusteroinnin onnistumista mittaavan funktion J optimointiin perustuvissa klusterointialgoritmeissä
FINNHEMS OY:N LÄÄKÄRIHELIKOPTERITUKIKOHTA
 KUOPION KAUPUNKI ATT: ASEMAKAAVAPÄÄLLIKKÖ MARTTI LÄTTI FINNHEMS OY:N LÄÄKÄRIHELIKOPTERITUKIKOHTA TUKIKOHDAN SIJOITTAMINEN KELLONIEMEEN: SYYT JA VAIKUTUKSET Tausta FinnHEMS Oy on yhdessä Pohjois-Savon sairaanhoitopiirin
KUOPION KAUPUNKI ATT: ASEMAKAAVAPÄÄLLIKKÖ MARTTI LÄTTI FINNHEMS OY:N LÄÄKÄRIHELIKOPTERITUKIKOHTA TUKIKOHDAN SIJOITTAMINEN KELLONIEMEEN: SYYT JA VAIKUTUKSET Tausta FinnHEMS Oy on yhdessä Pohjois-Savon sairaanhoitopiirin
KERTAUS KERTAUSTEHTÄVIÄ K1. P( 1) = 3 ( 1) + 2 ( 1) ( 1) 3 = = 4
 = 3 ( 1) + 2 ( 1) ( 1) 3 = = 4") KERTAUS KERTAUSTEHTÄVIÄ K1. P( 1) = 3 ( 1) + ( 1) + 3 ( 1) 3 = 3 + 3 = 4 K. a) x 3x + 7x 5x = 4x + 4x b) 5x 3 (1 x ) = 5x 3 1 + x = 6x 4 c) (x + 3)(x 4) = x 3 4x + 3x 1 = x 3 + 3x 4x 1 Vastaus: a) 4x +
KERTAUS KERTAUSTEHTÄVIÄ K1. P( 1) = 3 ( 1) + ( 1) + 3 ( 1) 3 = 3 + 3 = 4 K. a) x 3x + 7x 5x = 4x + 4x b) 5x 3 (1 x ) = 5x 3 1 + x = 6x 4 c) (x + 3)(x 4) = x 3 4x + 3x 1 = x 3 + 3x 4x 1 Vastaus: a) 4x +
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta. Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010
 TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 NSGA-II Non-dominated Sorting Genetic Algorithm (NSGA) Ehkä tunnetuin EMO-menetelmä
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 NSGA-II Non-dominated Sorting Genetic Algorithm (NSGA) Ehkä tunnetuin EMO-menetelmä
Helsingin seitsemäsluokkalaisten matematiikkakilpailu 7.2.2013 Ratkaisuita
 Helsingin seitsemäsluokkalaisten matematiikkakilpailu..013 Ratkaisuita 1. Eräs kirjakauppa myy pokkareita yhdeksällä eurolla kappale, ja siellä on meneillään mainoskampanja, jossa seitsemän sellaista ostettuaan
Helsingin seitsemäsluokkalaisten matematiikkakilpailu..013 Ratkaisuita 1. Eräs kirjakauppa myy pokkareita yhdeksällä eurolla kappale, ja siellä on meneillään mainoskampanja, jossa seitsemän sellaista ostettuaan
 1. Algoritmi 1.1 Sisällys Algoritmin määritelmä. Aiheen pariin johdatteleva esimerkki. Muuttujat ja operaatiot (sijoitus, aritmetiikka ja vertailu). Algoritmista ohjelmaksi. 1.2 Algoritmin määritelmä Ohjelmointi
1. Algoritmi 1.1 Sisällys Algoritmin määritelmä. Aiheen pariin johdatteleva esimerkki. Muuttujat ja operaatiot (sijoitus, aritmetiikka ja vertailu). Algoritmista ohjelmaksi. 1.2 Algoritmin määritelmä Ohjelmointi
T Luonnollisten kielten tilastollinen käsittely
 T-61.281 Luonnollisten kielten tilastollinen käsittely Vastaukset 3, ti 11.2.2003, 16:15-18:00 Kollokaatiot, Versio 1.1 1. Lasketaan ensin tulokset sanaparille valkoinen, talo käsin: Frekvenssimenetelmä:
T-61.281 Luonnollisten kielten tilastollinen käsittely Vastaukset 3, ti 11.2.2003, 16:15-18:00 Kollokaatiot, Versio 1.1 1. Lasketaan ensin tulokset sanaparille valkoinen, talo käsin: Frekvenssimenetelmä:
T Luonnollisen kielen tilastollinen käsittely Vastaukset 3, ti , 8:30-10:00 Kollokaatiot, Versio 1.1
 T-61.281 Luonnollisen kielen tilastollinen käsittely Vastaukset 3, ti 10.2.2004, 8:30-10:00 Kollokaatiot, Versio 1.1 1. Lasketaan ensin tulokset sanaparille valkoinen, talo käsin: Frekvenssimenetelmä:
T-61.281 Luonnollisen kielen tilastollinen käsittely Vastaukset 3, ti 10.2.2004, 8:30-10:00 Kollokaatiot, Versio 1.1 1. Lasketaan ensin tulokset sanaparille valkoinen, talo käsin: Frekvenssimenetelmä:
Matemaatikot ja tilastotieteilijät
 Matemaatikot ja tilastotieteilijät Matematiikka/tilastotiede ammattina Tilastotiede on matematiikan osa-alue, lähinnä todennäköisyyslaskentaa, mutta se on myös itsenäinen tieteenala. Tilastotieteen tutkijat
Matemaatikot ja tilastotieteilijät Matematiikka/tilastotiede ammattina Tilastotiede on matematiikan osa-alue, lähinnä todennäköisyyslaskentaa, mutta se on myös itsenäinen tieteenala. Tilastotieteen tutkijat
Algoritmit 2. Luento 11 Ti Timo Männikkö
 Algoritmit 2 Luento 11 Ti 24.4.2018 Timo Männikkö Luento 11 Rajoitehaku Kapsäkkiongelma Kauppamatkustajan ongelma Paikallinen etsintä Lyhin virittävä puu Vaihtoalgoritmit Algoritmit 2 Kevät 2018 Luento
Algoritmit 2 Luento 11 Ti 24.4.2018 Timo Männikkö Luento 11 Rajoitehaku Kapsäkkiongelma Kauppamatkustajan ongelma Paikallinen etsintä Lyhin virittävä puu Vaihtoalgoritmit Algoritmit 2 Kevät 2018 Luento
Mat Lineaarinen ohjelmointi
 Mat-.34 Lineaarinen ohjelmointi 9..7 Luento Kokonaislukuoptimoinnin algoritmeja (kirja.-.) Lineaarinen ohjelmointi - Syksy 7 / Luentorunko Gomoryn leikkaava taso Branch & Bound Branch & Cut Muita menetelmiä
Mat-.34 Lineaarinen ohjelmointi 9..7 Luento Kokonaislukuoptimoinnin algoritmeja (kirja.-.) Lineaarinen ohjelmointi - Syksy 7 / Luentorunko Gomoryn leikkaava taso Branch & Bound Branch & Cut Muita menetelmiä
Kirjoita ohjelma jossa luetaan kokonaislukuja taulukkoon (saat itse päättää taulun koon, kunhan koko on vähintään 10)
") Tehtävä 40. Kirjoita ohjelma, jossa luetaan 20 lukua, joiden arvot ovat välillä 10 100. Kun taulukko on täytetty, ohjelma tulostaa vain ne taulukon arvot, jotka esiintyvät taulukossa vain kerran. Tehtävä
Tehtävä 40. Kirjoita ohjelma, jossa luetaan 20 lukua, joiden arvot ovat välillä 10 100. Kun taulukko on täytetty, ohjelma tulostaa vain ne taulukon arvot, jotka esiintyvät taulukossa vain kerran. Tehtävä
A-osa. Ratkaise kaikki tämän osan tehtävät. Tehtävät arvostellaan pistein 0-6. Taulukkokirjaa saa käyttää apuna, laskinta ei.
 PITKÄ MATEMATIIKKA PRELIMINÄÄRIKOE 7..07 NIMI: A-osa. Ratkaise kaikki tämän osan tehtävät. Tehtävät arvostellaan pistein 0-. Taulukkokirjaa saa käyttää apuna, laskinta ei.. Valitse oikea vaihtoehto ja
PITKÄ MATEMATIIKKA PRELIMINÄÄRIKOE 7..07 NIMI: A-osa. Ratkaise kaikki tämän osan tehtävät. Tehtävät arvostellaan pistein 0-. Taulukkokirjaa saa käyttää apuna, laskinta ei.. Valitse oikea vaihtoehto ja
MATEMATIIKAN KOE. AMMATIKKA top 17.11.2005. 2. asteen ammatillisen koulutuksen kaikkien alojen yhteinen matematiikka kilpailu. Oppilaitos:.
 AMMATIKKA top 17.11.005 MATEMATIIKAN KOE. asteen ammatillisen koulutuksen kaikkien alojen yhteinen matematiikka kilpailu Nimi: Oppilaitos:. Koulutusala:... Luokka:.. Sarjat: MERKITSE OMA SARJA 1. Tekniikka
AMMATIKKA top 17.11.005 MATEMATIIKAN KOE. asteen ammatillisen koulutuksen kaikkien alojen yhteinen matematiikka kilpailu Nimi: Oppilaitos:. Koulutusala:... Luokka:.. Sarjat: MERKITSE OMA SARJA 1. Tekniikka
PRELIMINÄÄRIKOE. Lyhyt Matematiikka 3.2.2015
 PRELIMINÄÄRIKOE Lyhyt Matematiikka..015 Vastaa enintään kymmeneen tehtävään. Kaikki tehtävät arvostellaan asteikolla 0-6 pistettä. 1. a) Sievennä x( x ) ( x x). b) Ratkaise yhtälö 5( x 4) 5 ( x 4). 1 c)
PRELIMINÄÄRIKOE Lyhyt Matematiikka..015 Vastaa enintään kymmeneen tehtävään. Kaikki tehtävät arvostellaan asteikolla 0-6 pistettä. 1. a) Sievennä x( x ) ( x x). b) Ratkaise yhtälö 5( x 4) 5 ( x 4). 1 c)
Ohjelmoinnin peruskurssi Y1
 Ohjelmoinnin peruskurssi Y1 CSE-A1111 21.9.2015 CSE-A1111 Ohjelmoinnin peruskurssi Y1 21.9.2015 1 / 25 Mahdollisuus antaa luentopalautetta Goblinissa vasemmassa reunassa olevassa valikossa on valinta Luentopalaute.
Ohjelmoinnin peruskurssi Y1 CSE-A1111 21.9.2015 CSE-A1111 Ohjelmoinnin peruskurssi Y1 21.9.2015 1 / 25 Mahdollisuus antaa luentopalautetta Goblinissa vasemmassa reunassa olevassa valikossa on valinta Luentopalaute.
Ensihoidon ilmailupalvelut: Lääkärihelikopteritukikohtien sijainnin käsittely reformiministerityöryhmässä
 hallitusneuvos Ismo Tuominen, STM PERUSTELUMUISTIO Ensihoidon ilmailupalvelut: Lääkärihelikopteritukikohtien sijainnin käsittely reformiministerityöryhmässä Yhteenveto Ensihoidon ilmailupalveluiden strategista
hallitusneuvos Ismo Tuominen, STM PERUSTELUMUISTIO Ensihoidon ilmailupalvelut: Lääkärihelikopteritukikohtien sijainnin käsittely reformiministerityöryhmässä Yhteenveto Ensihoidon ilmailupalveluiden strategista
MTTTP5, luento Otossuureita ja niiden jakaumia (jatkuu)
") 21.11.2017/1 MTTTP5, luento 21.11.2017 Otossuureita ja niiden jakaumia (jatkuu) 4) Olkoot X 1, X 2,..., X n satunnaisotos (, ):sta ja Y 1, Y 2,..., Y m satunnaisotos (, ):sta sekä otokset riippumattomia.
21.11.2017/1 MTTTP5, luento 21.11.2017 Otossuureita ja niiden jakaumia (jatkuu) 4) Olkoot X 1, X 2,..., X n satunnaisotos (, ):sta ja Y 1, Y 2,..., Y m satunnaisotos (, ):sta sekä otokset riippumattomia.
2 Pistejoukko koordinaatistossa
 Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Kaksintaistelun approksimatiivinen mallintaminen (valmiin työn esittely)
") Kaksintaistelun approksimatiivinen mallintaminen (valmiin työn esittely) Juho Roponen 10.06.2013 Ohjaaja: Esa Lappi Valvoja: Ahti Salo Työn saa tallentaa ja julkistaa Aalto-yliopiston avoimilla verkkosivuilla.
Kaksintaistelun approksimatiivinen mallintaminen (valmiin työn esittely) Juho Roponen 10.06.2013 Ohjaaja: Esa Lappi Valvoja: Ahti Salo Työn saa tallentaa ja julkistaa Aalto-yliopiston avoimilla verkkosivuilla.
100-500 40-60 tai 240-260 400-600 tai 2 000-2 200 X
 Yleistä tilauksesta Yleistä tilauksesta Tilaa voimanotot ja niiden sähköiset esivalmiudet tehtaalta. Jälkiasennus on erittäin kallista. Suositellut vaatimukset Voimanottoa käytetään ja kuormitetaan eri
Yleistä tilauksesta Yleistä tilauksesta Tilaa voimanotot ja niiden sähköiset esivalmiudet tehtaalta. Jälkiasennus on erittäin kallista. Suositellut vaatimukset Voimanottoa käytetään ja kuormitetaan eri
LIITE 1 VIRHEEN ARVIOINNISTA
 Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
VALTAKUNNALLISIA TARKASTELUJA
 VALTAKUNNALLISIA TARKASTELUJA PELASTUSTOIMINNAN TYÖKUORMAN AJALLISESTA VAIHTELUSTA Pelastustoimen tutkijatapaaminen, Kuopio 6.6.2018 Hanna Rekola, Helsingin pelastuslaitos UUDENLAISIA NÄKÖKULMIA RESURSSIEN
VALTAKUNNALLISIA TARKASTELUJA PELASTUSTOIMINNAN TYÖKUORMAN AJALLISESTA VAIHTELUSTA Pelastustoimen tutkijatapaaminen, Kuopio 6.6.2018 Hanna Rekola, Helsingin pelastuslaitos UUDENLAISIA NÄKÖKULMIA RESURSSIEN
NOUSIAISTEN KUNTA. Työ: 26725. Tampere 20.1.2014
 NOUSIAISTEN KUNTA Kaitaraisten yritysalueen asemakaavan liikenneselvitys Työ: 26725 Tampere 20.1.2014 AIRIX Ympäristö Oy PL 453 33101 Tampere Puhelin 010 2414 000 Telefax 010 2414 001 Y-tunnus: 0564810-5
NOUSIAISTEN KUNTA Kaitaraisten yritysalueen asemakaavan liikenneselvitys Työ: 26725 Tampere 20.1.2014 AIRIX Ympäristö Oy PL 453 33101 Tampere Puhelin 010 2414 000 Telefax 010 2414 001 Y-tunnus: 0564810-5
Harjoitus 3 (3.4.2014)
") Harjoitus 3 (3..) Tehtävä Olkoon kaaren paino c ij suurin sallittu korkeus tieosuudella (i, j). Etsitään reitti solmusta s solmuun t siten, että reitin suurin sallittu korkeus pienimmillään olisi mahdollisimman
Harjoitus 3 (3..) Tehtävä Olkoon kaaren paino c ij suurin sallittu korkeus tieosuudella (i, j). Etsitään reitti solmusta s solmuun t siten, että reitin suurin sallittu korkeus pienimmillään olisi mahdollisimman
MATEMATIIKAN KOE, LYHYT OPPIMÄÄRÄ HYVÄN VASTAUKSEN PIIRTEITÄ
 MATEMATIIKAN KOE, LYHYT OPPIMÄÄRÄ 6.3.08 HYVÄN VASTAUKSEN PIIRTEITÄ Alla oleva vastausten piirteiden, sisältöjen ja pisteitysten luonnehdinta ei sido ylioppilastutkintolautakunnan arvostelua. Lopullisessa
MATEMATIIKAN KOE, LYHYT OPPIMÄÄRÄ 6.3.08 HYVÄN VASTAUKSEN PIIRTEITÄ Alla oleva vastausten piirteiden, sisältöjen ja pisteitysten luonnehdinta ei sido ylioppilastutkintolautakunnan arvostelua. Lopullisessa
Operaattorivertailu SELVITYS LTE VERKKOJEN KUULUVUUDESTA
 Operaattorivertailu SELVITYS LTE VERKKOJEN KUULUVUUDESTA SISÄLLYSLUETTELO TIIVISTELMÄ... 3 YLEISTÄ... 4 TAVOITE... 5 PAIKKAKUNNAT... 5 MITATUT SUUREET JA MITTAUSJÄRJESTELMÄ... 6 MITATUT SUUREET... 6 MITTAUSJÄRJESTELMÄ...
Operaattorivertailu SELVITYS LTE VERKKOJEN KUULUVUUDESTA SISÄLLYSLUETTELO TIIVISTELMÄ... 3 YLEISTÄ... 4 TAVOITE... 5 PAIKKAKUNNAT... 5 MITATUT SUUREET JA MITTAUSJÄRJESTELMÄ... 6 MITATUT SUUREET... 6 MITTAUSJÄRJESTELMÄ...
Jouni Huotari OLAP-ohjetekstit kopioitu Microsoftin ohjatun OLAP-kuution teko-ohjeesta. Esimerkin kuvaus ja OLAP-määritelmä
 OLAP-kuution teko Jouni Huotari OLAP-ohjetekstit kopioitu Microsoftin ohjatun OLAP-kuution teko-ohjeesta Esimerkin kuvaus ja OLAP-määritelmä Tavoitteena on luoda OLAP-kuutio Northwind-tietokannan tilaustiedoista
OLAP-kuution teko Jouni Huotari OLAP-ohjetekstit kopioitu Microsoftin ohjatun OLAP-kuution teko-ohjeesta Esimerkin kuvaus ja OLAP-määritelmä Tavoitteena on luoda OLAP-kuutio Northwind-tietokannan tilaustiedoista
TIETOJEN TUONTI TIETOKANNASTA + PIVOT-TAULUKON JA OLAP-KUUTION TEKO
 TIETOJEN TUONTI TIETOKANNASTA + PIVOT-TAULUKON JA OLAP-KUUTION TEKO JOUNI HUOTARI 2005-2010 OLAP-OHJETEKSTIT KOPIOITU MICROSOFTIN OHJATUN OLAP-KUUTION TEKO-OHJEESTA ESIMERKIN KUVAUS JA OLAP-MÄÄRITELMÄ
TIETOJEN TUONTI TIETOKANNASTA + PIVOT-TAULUKON JA OLAP-KUUTION TEKO JOUNI HUOTARI 2005-2010 OLAP-OHJETEKSTIT KOPIOITU MICROSOFTIN OHJATUN OLAP-KUUTION TEKO-OHJEESTA ESIMERKIN KUVAUS JA OLAP-MÄÄRITELMÄ
1. Johdanto Todennäköisyysotanta Yksinkertainen satunnaisotanta Ositettu otanta Systemaattinen otanta...
 JHS 160 Paikkatiedon laadunhallinta Liite III: Otanta-asetelmat Sisällysluettelo 1. Johdanto... 2 2. Todennäköisyysotanta... 2 2.1 Yksinkertainen satunnaisotanta... 3 2.2 Ositettu otanta... 3 2.3 Systemaattinen
JHS 160 Paikkatiedon laadunhallinta Liite III: Otanta-asetelmat Sisällysluettelo 1. Johdanto... 2 2. Todennäköisyysotanta... 2 2.1 Yksinkertainen satunnaisotanta... 3 2.2 Ositettu otanta... 3 2.3 Systemaattinen
Matikkaa KA1-kurssilaisille, osa 3: suoran piirtäminen koordinaatistoon
 Matikkaa KA1-kurssilaisille, osa 3: suoran piirtäminen koordinaatistoon KA1-kurssi on ehkä mahdollista läpäistä, vaikkei osaisikaan piirtää suoraa yhtälön perusteella. Mutta muut kansiksen kurssit, no
Matikkaa KA1-kurssilaisille, osa 3: suoran piirtäminen koordinaatistoon KA1-kurssi on ehkä mahdollista läpäistä, vaikkei osaisikaan piirtää suoraa yhtälön perusteella. Mutta muut kansiksen kurssit, no
Genimap Oy, lupa L4377. Liittymän toimivuustarkastelu Valtatie 4, Shellin liittymä, Ii. Mika Räsänen
 Genimap Oy, lupa L4377 Liittymän toimivuustarkastelu Valtatie 4, Shellin liittymä, Ii Mika Räsänen Valtatie 4, Shellin liittymä, Ii 1 1 LÄHTÖKOHDAT Tehtävä Tehtävänä on tarkastella liittymän toimivuutta
Genimap Oy, lupa L4377 Liittymän toimivuustarkastelu Valtatie 4, Shellin liittymä, Ii Mika Räsänen Valtatie 4, Shellin liittymä, Ii 1 1 LÄHTÖKOHDAT Tehtävä Tehtävänä on tarkastella liittymän toimivuutta
LABORAATIOSELOSTUSTEN OHJE H. Honkanen
 LABORAATIOSELOSTUSTEN OHJE H. Honkanen Tämä ohje täydentää ja täsmentää osaltaan selostuskäytäntöä laboraatioiden osalta. Yleinen ohje työselostuksista löytyy intranetista, ohjeen on laatinut Eero Soininen
LABORAATIOSELOSTUSTEN OHJE H. Honkanen Tämä ohje täydentää ja täsmentää osaltaan selostuskäytäntöä laboraatioiden osalta. Yleinen ohje työselostuksista löytyy intranetista, ohjeen on laatinut Eero Soininen
Graafit ja verkot. Joukko solmuja ja joukko järjestämättömiä solmupareja. eli haaroja. Joukko solmuja ja joukko järjestettyjä solmupareja eli kaaria
 Graafit ja verkot Suuntamaton graafi: eli haaroja Joukko solmuja ja joukko järjestämättömiä solmupareja Suunnattu graafi: Joukko solmuja ja joukko järjestettyjä solmupareja eli kaaria Haaran päätesolmut:
Graafit ja verkot Suuntamaton graafi: eli haaroja Joukko solmuja ja joukko järjestämättömiä solmupareja Suunnattu graafi: Joukko solmuja ja joukko järjestettyjä solmupareja eli kaaria Haaran päätesolmut:
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta. Yliassistentti Jussi Hakanen syksy 2010
 TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Optimaalisuus: objektiavaruus f 2 min Z = f(s) Parhaat arvot alhaalla ja vasemmalla
TIES592 Monitavoiteoptimointi ja teollisten prosessien hallinta Yliassistentti Jussi Hakanen jussi.hakanen@jyu.fi syksy 2010 Optimaalisuus: objektiavaruus f 2 min Z = f(s) Parhaat arvot alhaalla ja vasemmalla
Talousmatematiikan perusteet: Luento 12. Lineaarinen optimointitehtävä Graafinen ratkaisu Ratkaisu Excel Solverilla
 Talousmatematiikan perusteet: Luento 12 Lineaarinen optimointitehtävä Graafinen ratkaisu Ratkaisu Excel Solverilla Esimerkki Esim. Yritys tekee kahta elintarviketeollisuuden käyttämää puolivalmistetta,
Talousmatematiikan perusteet: Luento 12 Lineaarinen optimointitehtävä Graafinen ratkaisu Ratkaisu Excel Solverilla Esimerkki Esim. Yritys tekee kahta elintarviketeollisuuden käyttämää puolivalmistetta,
Scanclimber Oy Mastolavojen matematiikkaa
 Koostanut Essi Rasimus Opettajalle Scanclimber Oy Mastolavojen matematiikkaa Kohderyhmä: 8. - 9. -luokka Esitiedot: Ympyrän tasogeometria, kulman suuruus, nopeuden yhtälö Taustalla oleva matematiikka:
Koostanut Essi Rasimus Opettajalle Scanclimber Oy Mastolavojen matematiikkaa Kohderyhmä: 8. - 9. -luokka Esitiedot: Ympyrän tasogeometria, kulman suuruus, nopeuden yhtälö Taustalla oleva matematiikka:
VUOROVAIKUTUKSESTA VOIMAAN JA EDELLEEN LIIKKEESEEN. Fysiikan ja kemian pedagogiikan perusteet (mat/fys/kem suunt.), luento 1 Kari Sormunen
, luento 1 Kari Sormunen") VUOROVAIKUTUKSESTA VOIMAAN JA EDELLEEN LIIKKEESEEN Fysiikan ja kemian pedagogiikan perusteet (mat/fys/kem suunt.), luento 1 Kari Sormunen Vuorovaikutus on yksi keskeisimmistä fysiikan peruskäsitteistä
VUOROVAIKUTUKSESTA VOIMAAN JA EDELLEEN LIIKKEESEEN Fysiikan ja kemian pedagogiikan perusteet (mat/fys/kem suunt.), luento 1 Kari Sormunen Vuorovaikutus on yksi keskeisimmistä fysiikan peruskäsitteistä
MATEMATIIKKA 5 VIIKKOTUNTIA. PÄIVÄMÄÄRÄ: 8. kesäkuuta 2009
 EB-TUTKINTO 2009 MATEMATIIKKA 5 VIIKKOTUNTIA PÄIVÄMÄÄRÄ: 8. kesäkuuta 2009 KOKEEN KESTO: 4 tuntia (240 minuuttia) SALLITUT APUVÄLINEET: Eurooppa-koulun antama taulukkovihkonen Funktiolaskin, joka ei saa
EB-TUTKINTO 2009 MATEMATIIKKA 5 VIIKKOTUNTIA PÄIVÄMÄÄRÄ: 8. kesäkuuta 2009 KOKEEN KESTO: 4 tuntia (240 minuuttia) SALLITUT APUVÄLINEET: Eurooppa-koulun antama taulukkovihkonen Funktiolaskin, joka ei saa
RYHMÄKERROIN ÄÄNILÄHDERYHMÄN SUUNTAAVUUDEN
 ÄÄNILÄHDERYHMÄN SUUNTAAVUUDEN ARVIOINNISSA Seppo Uosukainen, Jukka Tanttari, Heikki Isomoisio, Esa Nousiainen, Ville Veijanen, Virpi Hankaniemi VTT PL, 44 VTT etunimi.sukunimi@vtt.fi Wärtsilä Finland Oy
ÄÄNILÄHDERYHMÄN SUUNTAAVUUDEN ARVIOINNISSA Seppo Uosukainen, Jukka Tanttari, Heikki Isomoisio, Esa Nousiainen, Ville Veijanen, Virpi Hankaniemi VTT PL, 44 VTT etunimi.sukunimi@vtt.fi Wärtsilä Finland Oy
S-114.3812 Laskennallinen Neurotiede
 S-114.381 Laskennallinen Neurotiede Projektityö 30.1.007 Heikki Hyyti 60451P Tehtävä 1: Virityskäyrästön laskeminen Luokitellaan neuroni ensin sen mukaan, miten se vastaa sinimuotoisiin syötteisiin. Syöte
S-114.381 Laskennallinen Neurotiede Projektityö 30.1.007 Heikki Hyyti 60451P Tehtävä 1: Virityskäyrästön laskeminen Luokitellaan neuroni ensin sen mukaan, miten se vastaa sinimuotoisiin syötteisiin. Syöte
Simulointi. Varianssinhallintaa Esimerkki
 Simulointi Varianssinhallintaa Esimerkki M C Esimerkki Tarkastellaan lasersäteen sirontaa partikkelikerroksesta Jukka Räbinän pro gradu 2005 Tavoitteena simuloida sirontakuvion tunnuslukuja Monte Carlo
Simulointi Varianssinhallintaa Esimerkki M C Esimerkki Tarkastellaan lasersäteen sirontaa partikkelikerroksesta Jukka Räbinän pro gradu 2005 Tavoitteena simuloida sirontakuvion tunnuslukuja Monte Carlo
MATEMATIIKKA 5 VIIKKOTUNTIA
 EB-TUTKINTO 2008 MATEMATIIKKA 5 VIIKKOTUNTIA PÄIVÄMÄÄRÄ: 5. kesäkuuta 2008 (aamupäivä) KOKEEN KESTO: 4 tuntia (240 minuuttia) SALLITUT APUVÄLINEET: Europpa-koulun antama taulukkovihkonen Funktiolaskin,
EB-TUTKINTO 2008 MATEMATIIKKA 5 VIIKKOTUNTIA PÄIVÄMÄÄRÄ: 5. kesäkuuta 2008 (aamupäivä) KOKEEN KESTO: 4 tuntia (240 minuuttia) SALLITUT APUVÄLINEET: Europpa-koulun antama taulukkovihkonen Funktiolaskin,
TTY Mittausten koekenttä. Käyttö. Sijainti
 TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
LIITE 1 VIRHEEN ARVIOINNISTA
 1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
Korkeusmallien vertailua ja käyttö nitraattiasetuksen soveltamisessa
 Korkeusmallien vertailua ja käyttö nitraattiasetuksen soveltamisessa Valtakunnallisesti kattavaa laserkeilausaineistoa ei vielä ole. Kaltevuusmallit perustuvat tällä hetkellä digitaalisen korkeusmallin
Korkeusmallien vertailua ja käyttö nitraattiasetuksen soveltamisessa Valtakunnallisesti kattavaa laserkeilausaineistoa ei vielä ole. Kaltevuusmallit perustuvat tällä hetkellä digitaalisen korkeusmallin
LÄMMITYSENERGIA- JA KUSTANNUSANALYYSI 2014 AS OY PUUTARHAKATU 11-13
 LÄMMITYSENERGIA- JA KUSTANNUSANALYYSI 2014 AS OY PUUTARHAKATU 11-13 2 LÄMMITYSENERGIA- JA KUSTANNUSANALYYSI 2014 Yhtiössä otettiin käyttöön lämmön talteenottojärjestelmä (LTO) vuoden 2013 aikana. LTO-järjestelmää
LÄMMITYSENERGIA- JA KUSTANNUSANALYYSI 2014 AS OY PUUTARHAKATU 11-13 2 LÄMMITYSENERGIA- JA KUSTANNUSANALYYSI 2014 Yhtiössä otettiin käyttöön lämmön talteenottojärjestelmä (LTO) vuoden 2013 aikana. LTO-järjestelmää
Mitä kalibrointitodistus kertoo?
 Mitä kalibrointitodistus kertoo? Luotettavuutta päästökauppaan liittyviin mittauksiin MIKES 21.9.2006 Martti Heinonen Tavoite Laitteen kalibroinnista hyödytään vain jos sen tuloksia käytetään hyväksi.
Mitä kalibrointitodistus kertoo? Luotettavuutta päästökauppaan liittyviin mittauksiin MIKES 21.9.2006 Martti Heinonen Tavoite Laitteen kalibroinnista hyödytään vain jos sen tuloksia käytetään hyväksi.
pitkittäisaineistoissa
 Puuttuvan tiedon käsittelystä p. 1/18 Puuttuvan tiedon käsittelystä pitkittäisaineistoissa Tapio Nummi tan@uta.fi Matematiikan, tilastotieteen ja filosofian laitos Tampereen yliopisto Puuttuvan tiedon
Puuttuvan tiedon käsittelystä p. 1/18 Puuttuvan tiedon käsittelystä pitkittäisaineistoissa Tapio Nummi tan@uta.fi Matematiikan, tilastotieteen ja filosofian laitos Tampereen yliopisto Puuttuvan tiedon