Liikeradan luonti geometriasta ja synkronointi oikean robotin IRB6620 kanssa
|
|
|
- Joel Salonen
- 9 vuotta sitten
- Katselukertoja:
Transkriptio
1 ROBOTIIKAN JATKOKURSSI Sisältö: 1. RAPID ohjelmointikieli (4 x 3 h) Kertausta (Rapidkertaus.docx) Uudet käskyt ja funktiot Robottien konfigurointi (Virtuaalirobotilla harjoitellaan) Laboraatiot (IRB 4400 ja IRB 6620) -work-objektien ja työkalujen määrittely(laboraatio 1) - keskeytykset ja virheenkäsittelyt (Laboraatio 2) -Search yms. edistykselliset käskyt (sis. Laboraatio 2) -analogia antureiden käyttö (Laboraatio 4, IRB4400) 2. Robot Studio ohjelman käyttö (4 x 3 h) Kertausta Robotin luonti Geometrian luontia Liikeradan luonti geometriasta ja synkronointi oikean robotin IRB6620 kanssa Screen Makerin käyttö Virtuaaliharjoitus (Laboraatio 3) 3. Voimaohjaus (3 x 3 h) Teoriaa ja käytännön testit IRB6620 robotilla (Laboraatio 4) 4. MultiMove RobotStudiolla (1 x 3 h) Harjoitellaan virtuaalirobotilla.
 Kertausta Robotin luonti Geometrian luontia Liikeradan luonti geometriasta ja synkronointi oikean robotin IRB6620 kanssa Screen Makerin käyttö")
2 Rapid ohjelmointikieli a)kerrataan peruskurssin materiaali ja harjoitellaan RST -ohjelman avulla. b)käydään ensin teoriassa työkalupisteiden ja workobjektien luonti. Seuraavaksi harjoitellaan RSTohjelman avulla ja lopuksi IRB6620 (voimaohjaustappi-työkalulla) ja IRB4400 (laseranturi-työkalulla). Parametrien tallennus ja lataus sekä luonti harjoittelemalla virtuaalirobotilla. c) Hyödylliset käskyt ja funktiot sekä näiden tarvitsemat datatiedot Datat: loaddata, confdata intnum, errnum (Err_Wait_MaxTime, Err_WHL_Search) tooldata, wobjdata Käskyt: SearchL, RAISE, RETRY Keskeytykset Ohjelman siirros (ProgDisp. jne) Multitasking ja edistykselliset liikekäskyt Funktiot: DefDFrame, DefFrame DATAT CONFDATA Käytetään määriteltäessä robotin akselien konfiguraatiota. Kuvaus: Kaikki robotin paikoitukset ovat määritetty ja tallennettu käyttäen suorakulmaisia koordinaatteja. Kun lasketaan vastaavan akselin asema, niin usein on kaksi tai useampia mahdollisia ratkaisuja. Tämä tarkoittaa, että robotti kykenee saavuttamaan saman aseman toisin sanoen työkalu on samassa asemassa ja samassa suuntauksessa useissa eri paikoissa tai robottien akselien määrittelyissä. Yksiselitteisesti osoitettaessa vain yksi mahdollinen asento, robotin konfiguraatio on määritetty neljällä akseliarvolla. Pyörivälle akselille arvo määritellään sen hetkisellä robottiakselin neljänneksellä. Neljännekset ovat numeroitu 0, 1, 2, jne (ne voivat myös olla negatiivisia). Neljänneksen numero liittyy sen hetkiseen akselin numeroon. Kunkin akselin quadrant 0 on ensimmäinen neljänneskierros, 0-90 positiiviseen suuntaan nolla-asennosta. Quadrant 1 on seuraava neljänneskierros, , jne. Neljännes 1 on neljänneskierros 0 ( 90 ), jne..
 Hyödylliset käskyt ja funktiot sekä näiden tarvitsemat datatiedot Datat: loaddata, confdata intnum, errnum (Err_Wait_MaxTime, Err_WHL_Search) tooldata, wobjdata Käskyt: SearchL, RAISE, RETRY")
3 Kuva 1 Konfiguraatio neljännekselle 6-akselilla Robotin konfiguraation datat robottimalleille IRB 1400, 2400, 3400,4400,6400 ERRNUM - vain kolme parametria: cf1, cf4 ja cf6 ovat käytössä eli vastaavasti akselit 1, 4 ja 6 - esim. VAR confdata omakonf:=[1,-1,0] akselin 1 neljännes 1 ( astetta) akselin 4 neljännes -1 (0-(-90) astetta) akselin 6 neljännes 0 (0-90 astetta) Errnum datalla määritellään kaikki korjattavat virheet (non fatal), jotka ilmenevät ohjelman ajon aikana. Jos robotti havaitsee virheen ohjelman suorituksen aikana, se voidaan käsitellä rutiinin virheenkäsittelijä rutiinilla(errorhandler). Tällaisia virheitä ovat esimerkiksi liian suuret arvot ja jako nollalla. Järjestelmämuuttujan ERRNO tyyppi on errnum, joka määritetään virheen tyypin mukaisesti. Virheenkäsittelyrutiini voi korjata virheen lukemalla tämä muuttuja ja sitten ohjelman suoritus voi edetä oikein. Mahdollinen virhe voidaan luoda myös ohjelmassa käyttämällä RAISE käskyä. Tällainen virhe havaitaan virheenkäsittelyn virhenumeron (1 90) määrittelyn avulla. Esimerkkejä: reg1 := reg2 / reg3; ERROR IF ERRNO = ERR DIVZERO THEN reg3 := 1; RETRY; ENDIF IF di1=0 RAISE machine_error;
![VAR confdata omakonf:=[1,-1,0] akselin 1 neljännes 1 (90-180 astetta) akselin 4 neljännes -1 (0-(-90) astetta) akselin 6 neljännes 0 (0-90 astetta) Errnum datalla määritellään kaikki korjattavat](/docs-images/48/15911235/images/page_3.jpg "virheet (non fatal), jotka ilmenevät ohjelman ajon aikana. Jos robotti havaitsee virheen ohjelman suorituksen aikana, se voidaan käsitellä rutiinin virheenkäsittelijä rutiinilla(errorhandler).")
4 ERROR IF ERRNO=machine_error RAISE; Harjoituksessa testataan ERR_WAIT_MAXTIME (TimeOut suoritettaessa WaitDI tai WaitUntil käskyjä) sekä ERR_WHLSEARCH (SEARCHL käskyn aikana ei tapahdu pysähdystä ennen loppupaikkaa). INTNUM Intnum (interrupt numeerinen) käytetään tunnistamaan keskeytys. Kun muuttuja (tyyppi intnum) liitetään keskeytysrutiiniin, sille annetaan tietty arvo tunnistamaan keskeytys. Tämä muuttuja on käytössä kaikissa tilanteissa keskeytyksen käsittelyssä, kuten pyydettäessä tai poistuessa keskeytyksestä. Useampi keskeytys voidaan liittää samaan keskeytysrutiiniin(trap routine). Järjestelmämuuttuja INTNO:a voidaan käyttää näin keskeytysrutiinin määrittelyssä. Esimerkkejä: VAR intnum feeder_error; CONNECT feeder_error WITH correct_feeder; ISignalDI di1, 1, feeder error; Keskeytys syntyy, kun tulo di1 on 1. Tämän tapahtuessa kutsutaan correct_feeder keskeytysrutiinia. VAR intnum feeder1_error; VAR intnum feeder2_error; PROC init_interrupt(); CONNECT feeder1_error WITH correct_feeder; ISignalDI di1, 1, feeder1 error; CONNECT feeder2_error WITH correct_feeder; ISignalDI di2, 1, feeder2 error; ENDPROC TRAP correct_feeder IF INTNO=feeder1_error THEN.. ELSE ENDIF ENDTRAP
.")
5 LOADDATA Loaddata tyyppistä muuttuja käytetään määrittelemään robotin työkaluun kiinnitettyä kuormaa. Käskyllä GripLoad otetaan ennalta määritelty kuorma käyttöön. Työkalun tooldata tyyppinen muuttuja puolestaan sisältää työkalun painon. Käytettäessä kuormituksen määrittelyä robotin liikkeen ohjaus toimii optimaalisesti. Väärin määritellyt kuormitukset voivat aiheuttaa robotin mekaanisen rikkoutumisen. loaddata mass (num): kuorman paino kg cog (pos): kuorman painopiste(x,y,z) mm:ssä työkalukoordinaatistossa aom (orient):kuormituksen sisäisten akselien orientaatio (q1, q2, q3,q4) ix, iy, iz (num): kuormituksen inertia, merkitystä käsiteltäessä pinta-alaltaan suuria kappaleita, käytettäessä 0 arvoja on kysymyksessä pistemäinen massa
: kuorman paino kg cog (pos): kuorman painopiste(x,y,z) mm:ssä työkalukoordinaatistossa aom (orient):kuormituksen sisäisten akselien orientaatio (q1, q2, q3,q4) ix,")
6 Esimerkki: PERS loaddata piece1: [ 5, [50, 0, 50], [1, 0, 0, 0], 0, 0, 0]; - Weight 5 kg. - The centre of gravity is x = 50, y = 0 and z = 50 mm in the tool coordinate system. - The payload is a point mass. Set gripper; WaitTime 0.3; GripLoad piece 1; Reset gripper; WaitTime 0.3; GripLoad load0; PERS loaddata load0:= [ 0.001, [0, 0, 0.001],[1, 0, 0, 0],0,0,0 ]; TOOLDATA Tooldata tyyppistä muuttujaa käytetään työkalun määrittelyyn, kuten esim. hitsauspistoolin tai tarttujan. Työkalu tiedot vaikuttavat robotin liikkeeseen seuraavasti: - työkalun keskipiste (TCP) viittaa kohtaan, jossa täyttyy määritetty rata ja liikenopeus tooldata robhold (bool): onko robotissa kiinni vai ei

7 tframe (pose): Työkalukoordinaatistossa: TCP (x, y ja z) ilmaistuna mm:ssä suhteessa ranteen koordinaatistoon ja työkalun orientaatio (q 1, q2, q3 and q4). tload (loaddata): työkalun paino kg cog (pos): kuorman painopiste(x,y,z) mm:ssä ranteen koordinaatistossa aom (orient):kuormituksen sisäisten akselien orientaatio (q1, q2, q3,q4) suhteessa ranteen ranteen koordinaatistoon ix, iy, iz (num): työkalun inertia, käytettäessä 0 arvoja on kysymyksessä pistemäinen massa
:kuormituksen sisäisten akselien orientaatio (q1, q2, q3,q4) suhteessa ranteen ranteen koordinaatistoon ix,")
8 Esimerkki: PERS tooldata gripper:= [ TRUE, [[97.4, 0, 223.1], [0.924, 0, 0.383,0]], [5, [23, 0, 75], [1, 0, 0, 0], 0, 0, 0]]; Yllä olevassa kuvassa olevan työkalun määrittelyt: - Työkalu on kiinni robotissa. - TCP sijaitsee pisteessä, joka on mm suoraan ulospäin akselista 6 ja 97.4 mm sivussa X-akselin suuntaan - X- and Z-suunnassa työkalu on kiertynyt 45 suhteessa ranteen koordinaatistoon. - Työkalu painaa 5 kg. - Työkalun painopiste on pisteessä, joka on75 mm suoraan ulospäin akselista 6 and 23 mm sivussa X- akselin suunnassa - Työkalun massakuorma on pistemäinen ilman inertiaa Esimerkki: gripper.tframe.trans.z := 225.2; Säädetään työkalun arvoksi mm z-suunnassa gripper.tframe.trans.z := gripper.tframe.trans.z + 1.1; Lisätään työkalun z-arvoon 1.1 mm PERS tooldata tool0 := [ TRUE, [ [0, 0, 0], [ 1, 0, 0,0] ], [0.001, [0, 0, 0.001], [1, 0, 0, 0], 0, 0, 0] ]; WOBJDATA Liikekäskyjen yhteyteen voidaan liittää ennalta määrätty työkohde(wobj), jonka suhteen robotti liikkuu. Edut: 1) Jos paikoitustiedot annetaan manuaalisesti, kuten off-line ohjelmoinnissa usein tehdään, niin paikoitusarvot voidaan ottaa suoraan kuvasta.

9 2) Ohjelmat ovat nopeasti uudelleen käytettävissä huomioon ottaen muutokset robotin asennuksessa. 3) Työkohteessa tapahtuvat muutokset voidaan kompensoida. Tällöin käytetään jotakin anturia mittaamaan työkohteen sijainti. 4) Liikutettaessa robottia ohjaussauvalla saadaan se liikkumaan työkohteen koordinaattiakselien suuntaisesti. 5) Nykyinen paikka nähdään heti suhteessa työkohteen origoon. wobjdata robhold (bool): onko wobj robotissa vai ympäristössä ufprog (bool): käytetäänkö kiinteätä vai liikkuvaa käyttäjäkoordinaatistoa ufmec (string):mekaaninen laite, jonka suhteen robotin liikkeet ovat määriteltyjä uframe (pose): käyttäjäkoordinaatisto (kuva), origo annetaan (x,y,z) mm:ssä ja kierto quaternioina (q1,q2,q3,q4) oframe (pose): kohdekoordinaatisto, joka määritellään suhteessa käyttäjäkoordinaatistoon(kuva) Esimerkki: PERS wobjdata wobj2 :=[ FALSE, TRUE, "", [ [300, 600, 200], [1, 0, 0,0] ], [ [0, 200, 30], [1, 0, 0,0] ] ];
: onko wobj robotissa vai ympäristössä ufprog (bool): käytetäänkö kiinteätä vai liikkuvaa käyttäjäkoordinaatistoa ufmec (string):mekaaninen laite, jonka suhteen robotin")
10 Työkohde ei ole robottiin kiinnitettynä.(false) Kiinteä käyttäjäkoordinaatisto on käytössä (TRUE) Käyttäjäkoordinaatiston origon arvot ovat: x=300, y=600 ja z=200 (maailman koordinaatiston origosta mitattuna) ja kiertoa ei ole( [1, 0, 0,0]). Kohdekoordinaatiston origon arvot ovat: x=0, y=200 ja z=30 (käyttäjäkoordinaatiston origosta mitattuna) ja kiertoa ei ole( [1, 0, 0,0]). Esimerkki: wobj2.oframe.trans.z := 38.3; Säädetään wobj2 arvoksi 38.3 mm z-suunnassa PERS wobjdata wobj0 := [ FALSE, TRUE, "", [ [0, 0, 0], [1, 0, 0,0] ], [ [0, 0, 0], [1,0 0,0] ]], FUNKTIOT ja KÄSKYT DefDFrame DefDFrame (define displacement frame) on käytössä, kun halutaan laskea kehyksen siirtymä kolmen alkuperäisen pisteen ja kolmen siirrospisteen avulla. CONST robtarget p1 :_ [...]; CONST robtarget p2 :_ [...]; CONST robtarget p3 :_ [...]; VAR robtarget p4; VAR robtarget p5; VAR robtarget p6; VAR pose frame1;! Etsitään uudet pisteet SearchL sen 1, p4, *, v50, tool1;
![0,0]). Kohdekoordinaatiston origon arvot ovat: x=0, y=200 ja z=30 (käyttäjäkoordinaatiston origosta mitattuna) ja kiertoa ei ole( [1, 0, 0,0]). Esimerkki: wobj2.oframe.trans.z := 38.](/docs-images/48/15911235/images/page_10.jpg "3; Säädetään wobj2 arvoksi 38.")
11 SearchL sen1, p5, *, v50, tool 1; SearchL sen1, p6, *, v50, tool1; frame := DefDframe (p 1, p2, p3, p4, p5, p6); DefFrame! Aktivoidaan kehyksen frame1 siirros käskyllä PDispSet frame1; DefFrame (Define Frame) on käytössä, kun halutaan määritellä kehys kolmen pisteen avulla. Vallitsevassa kohdekoordinaatissa olevat kolme pistettä määrittelevät uuden koordinaatiston(kehyksen), frame1. Ensimmäinen piste p1 määrittelee uuden kehyksen origon ja toinen piste p2 määrittelee x- akselin suunnan ja kolmas piste p3 määrittelee xy -tason sijainnin. CONST robtarget p1 := [...]; CONST robtarget p2 := [...]; CONST robtarget p3 := [...]; VAR pose frame 1; frame1 := DefFrame (p1, p2, p3);! Aktivoidaan kehyksen frame1 siirros käskyllä PDispSet frame1;

12 PDispSet PDispSet (Program Displacement Set) on käytössä, kun määritellään ja aktivoidaan ohjelman siirros käyttäen arvoja. Tämä on hyödyllinen toiminta, kun esimerkiksi tehdään samanlaisia robotin liikesarjoja useissa erilaisissa paikoissa samassa ohjelmassa. Esimerkiksi alla olevassa siirretään kaikkia mahdollisia ohjelmoituja paikoituksia 100 mm x-akselin positiiviseen suuntaan. Aktivoitu ohjelman siirros poistetaan käytöstä käskyllä PDispOff tai kun robotti käynnistetään uudestaan, ladataan uusi ohjelma sekä tilanteissa, joissa ohjelman suoritus aloitetaan aivan alusta. VAR pose xp100 := [ [100, 0, 0], [1, 0, 0, 0] ]; PDispSet xp100; PDispOn PDispOn (Program Displacement On) on käytössä, kun määritellään ja aktivoidaan ohjelman siirros käyttäen kahta robotin paikoitusta. PDispOn [ \Rot ] [ \ExeP ] ProgPoint Tool [ \WObj ] [\Rot ] (Rotation) Data type: switch Erot työkalun orientaatiossa otetaan huomioon ja tämän huomioidaan siis ohjelman suorituksessa. [\ExeP ] (Executed Point) Data type: robtarget Robotin uusi paikoituspiste ohjelman ajon aikana. Jos tämä argumentti ei ole valittuna, niin nykyinen paikoituspiste on käytössä ohjelman ajon aikana. [ProgPoint] (Programmed Point) Data type: robtarget Robotin alkuperäinen paikoituspiste.

13 Esimerkkejä: MoveL p 10, v500, z10, tool1; PDispOn \ExeP:= p10, p20, tool1 ;! Aktivoidaan ohjelman siirros (liikkeen aikana) paikoitusten p10 ja p20 erotuksella. Tällöin kaikki ohjelmoidut pisteet siirtyvät. PDispOn \Rot\ExeP:= p10, p20, tool1;

14 PROC nelio() PDispOn *, tool1; MoveL *,v500,z10,tool1; MoveL *,v500,z10,tool1; MoveL *,v500,z10,tool1; MoveL *,v500,z10,tool1; PDispOff; ENDPROC PROC piirrra_neliot() MoveL p10,v500,fine,tool1; nelio; MoveL p20,v500,fine,tool1; nelio; MoveL p30,v500,fine,tool1; nelio; SearchL sen1, pseacrh,p60, v100, tool1\wobj:= Kuljetin1; PDispOn \ExeP:=psearch, *, tool1 \Wobj:=Kuljetin1; PDispOff PDispOff (Program Displacement Off) on käytössä, kun ohjelman siirros otetaan pois käytöstä. MoveL p 10, v500, z 10, tool 1; PDispOn \ExeP:=p10, p11, tool1 ; MoveL p20, v500, z10, tool1; MoveL p30, v500, z10, tool1; PDispOff; MoveL p40, v500, z10, tool1; SearchL SearchL (Search Linear) toteuttaa lineaarisen etsintäliikkeen, jonka aikana valvotaan digitaalisen tulon muuttumista. Tämän muuttuessa robotti lukee sen hetkisen paikoituksen. SearchL, anturi1, paikka, kohdepaikka, v100, tarttuja1; Anturi1:n arvon muuttuessa mentäessä kohti kohdepaikkaa tallennetaan sen hetkinen asema muuttujaan paikka. SearchL \Stop, anturi1, paikka, kohdepaikka, v100, tarttuja1;.ja robotti pysähtyy välittömästi.
")
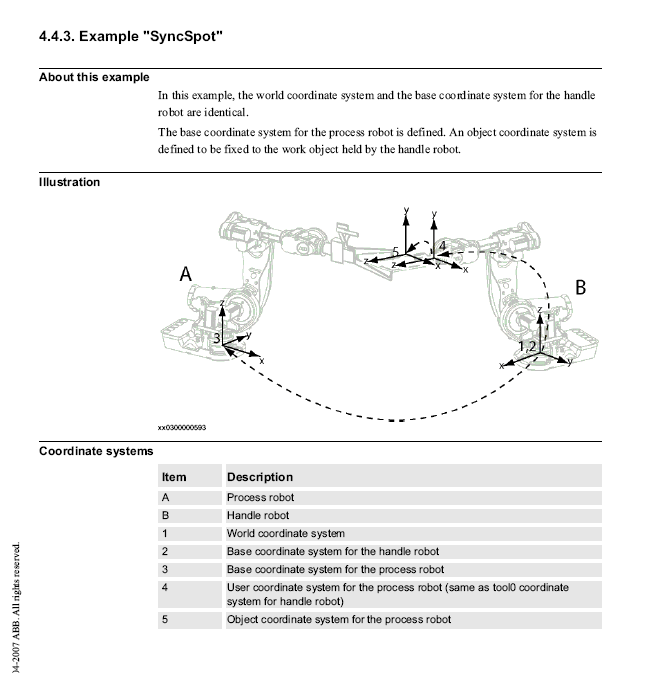
15 SearchL [ \Stop ] I [ \PStop ] I[ \Sup ] Signal [ \Flanks ] SearchPoint ToPoint Speed [ \V ] I [ \T ] Tool [ \WObj ] [ \Corr ] [ \Stop ] Robotti pysähtyy mahdollisimman nopeasti välittämättä siitä pysyykö TCP ohjelmoidulla liikeradalla.(hard stop) [ \PStop ] (Path Stop) Robotti pysähtyy mahdollisimman nopeasti pitäen TCP:n ohjelmoidulla liikeradalla. (soft stop) [ \Sup ] (Supervision) Etsintä toiminto on herkkä anturitilan muutoksille liikkeen aikana eli jos etsintä liikkeen aikana tulee enemmän kuin yksi muutos anturin tilassa, niin ohjelman suoritus pysähtyy. Jos mikään [\Stop ] I [ \PStop ] I[ \Sup ] argumenteista ei ole valittuna, niin [ \Sup ] argumentti on tavallaan toiminnollisesti valittuna. [ \Flanks ] Molemmat anturin tilat ovat valittuna eli huomioidaan sekä positiivisen että negatiivisen anturitilan muutos. [ \Corr ] Käskyllä CorrWrite lisätty korjaustieto lisätään rataan ja kohdepaikkaan GripLoad GripLoad on käytössä, kun määritellään robotin tarttujassa olevan kappaleen kuorma. ISignalDI GripLoad piece1;! Tarttujassa on piece1(loaddata) GripLoad load0;! Tarttujassa ei ole mitään. ISignalDI (Interrupt Signal Digital In) on käytössä, kun pyydetään ja sallitaan keskeytyksiä digitaalisen tulotiedon perusteella. Myös systeemin signaalit voivat generoida keskeytyksiä. VAR intnum sig1int; CONNECT sig1int WITH iroutine 1; ISignaIDI di1, 1, sig1int; ISignaIDI\Single di1, 1, sig1int;! Pyytää keskeytystä vain kerran di1:n tilan muuttuessa arvoon 1. CONNECT CONNECT on käytössä, kun tunnistetaan keskeytys ja liitetään se valittuun keskeytysrutiiniin.
![(soft stop) [ \Sup ] (Supervision) Etsintä toiminto on herkkä anturitilan muutoksille liikkeen aikana eli jos etsintä liikkeen aikana tulee enemmän kuin yksi muutos anturin tilassa, niin ohjelman](/docs-images/48/15911235/images/page_15.jpg "suoritus pysähtyy. Jos mikään [\Stop ] I [ \PStop ] I[ \Sup ] argumenteista ei ole valittuna, niin [ \Sup ] argumentti on tavallaan toiminnollisesti valittuna.")
16 VAR intnum feeder_low; CONNECT feeder_low WITH feeder_empty; ISignalDI di1, 1, feeder_low; Keskeytys syntyy, kun tulo di1 on 1. Tämän tapahtuessa kutsutaan feeder_empty keskeytysrutiinia. IEnable ja IDisable IEnable (Interrupt Enable) on käytössä, kun ohjelman suorituksen aikana sallitaan keskeytykset. IDisable (Interrupt Disable) on käytössä, kun väliaikaisesti halutaan estää keskeytykset. IDelete IDisable; FOR i FROM 1 TO 100 DO character[i]:=readbin(sensor); ENDFOR IEnable;! Niin kauan kuin luetaan sarjaporttia ei sallita keskeytyksiä, mutta kun luku on suoritettu sallitaan taas keskeytykset. IDelete (Interrupt Delete) on käytössä, kun keskeytys halutaan peruuttaa tai poistaa Jos halutaan vain väliaikaisesti estää keskeytys, niin tällöin käytetään käskyä IDisable tai ISleep. ErrWrite IDelete feeder_low; ErrWrite (Error Write) on käytössä, kun halutaan TeachPendant/FlexPendant- laitteelle virheilmoitukset näkyviin sekä myös kirjoittaa ne robotin logi- tiedostoon. ErrWrite "PLC error", "Fatal error in PLC" \RL2:="Call service"; Stop;! Viesti kirjoitetaan logiin ja näytetään se näytöllä. ErrWrite \ W " Search error", "No hit for the first search"; RAISE try-search-again;! Viesti kirjoitetaan ainoastaan logiin ja ohjelman suoritus jatkuu. ErrWrite [ \W ] Header Reason [ \RL2] [ \RL3] [ \RL4]
![IDisable (Interrupt Disable) on käytössä, kun väliaikaisesti halutaan estää keskeytykset. IDelete IDisable; FOR i FROM 1 TO 100 DO character[i]:=readbin(sensor); ENDFOR IEnable;!](/docs-images/48/15911235/images/page_16.jpg "Niin kauan kuin luetaan sarjaporttia ei sallita keskeytyksiä, mutta kun luku on suoritettu sallitaan taas keskeytykset.")
17 [ \W ] (Warning) Kirjoitetaan vain logiin, ei näytetä Header Viestin sisältö (max. 24 merkkiä). Reason Virheen syy riville 1 (max. 40 merkkiä) [ \RL2] (Reason Line 2) [ \RL3] (Reason Line 3) [ \RL4] (Reason Line 4) RAISE Raise on käytössä, kun luodaan virhe ohjelmaan ja sitten kutsutaan rutiinin virheen käsittelijä. Sitä voidaan myös käyttää virheenkäsittelijässä lisäämään sen hetkinen virhe rutiinin virheenkäsittelijän kutsuun. Esimerkiksi hypätään korkeammalle tasolle kuten main rutiinin virheenkäsittelijään alirutiinin virheenkäsittelijästä. IF... RAISE escape; ERROR IF ERRNO =escape RAISE;! Hypätään sen rutiinin virheenkäsittelijään, josta kutsu tähän rutiinin on tehty. RAISE [Error no.] Virhenumero: väliltä 1-90, jota virheenkäsittely voi käyttää (ERRNO järjestelmä muuttuja).. Virhenumero on määritettävä ulkopuolella virheenkäsittelijästä, jossa on käytetty RAISE käskyä.

18 RETRY Retry on käytössä, kun halutaan uudelleen käynnistää ohjelman virheenkäsittelyn jälkeen. reg2 := reg3/reg4; ERROR IF ERRNO = ERR_DIVZERO THEN reg4 := 1; RETRY; ENDIF TRYNEXT Trynext on käytössä, kun halutaan hypätä sen käskyn yli, missä virhe tapahtui. reg2 :=reg3/reg4;! Hypätään tähän TRYNEXT käskyllä eli ensin on sijoitettu reg2:n arvoksi 0, jos siis jakajana eli reg4 on nolla ERROR IF ERRNO = ERR_DIVZERO THEN reg2:=0; TRYNEXT; ENDIF

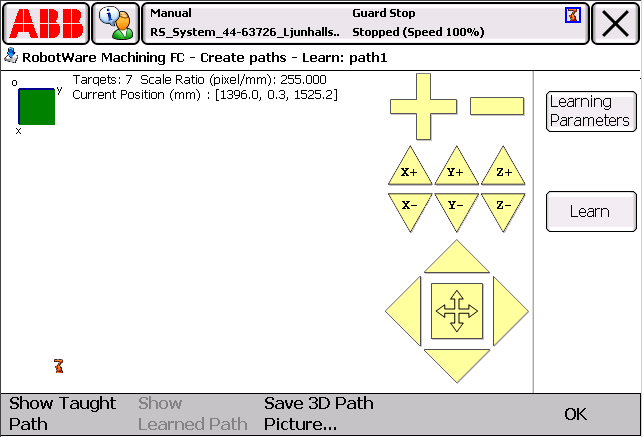
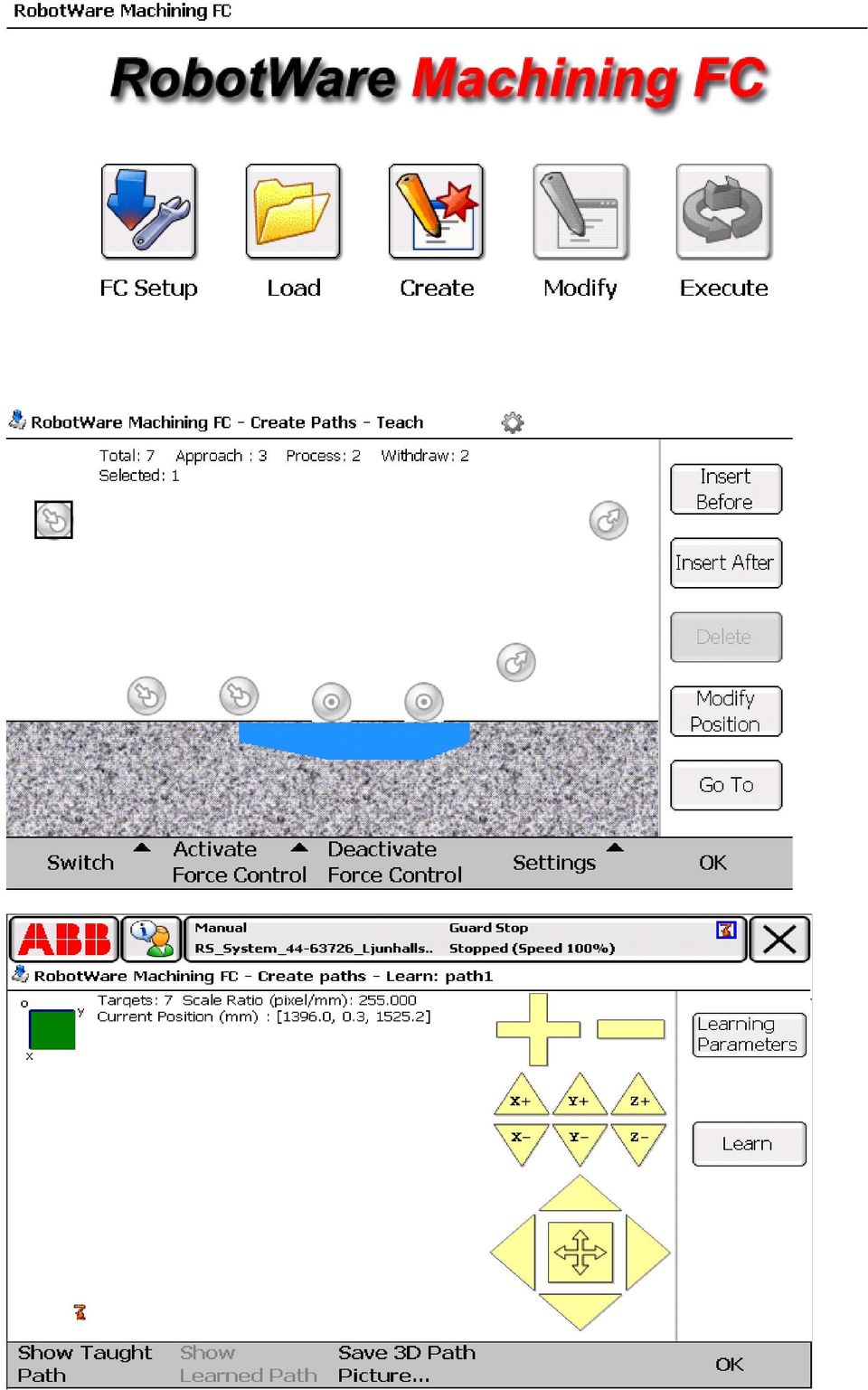
19 VOIMAOHJAUS (RobotWare Machining FC) RobotWareFC koneistus mahdollistaa korkea tasoisen pintojen viimeistelyn ja hionnan, samoin se mahdollistaa valukappaleiden jäysteen poiston optimaalisesti. RobotWare Machining FC tarjoaa kolme kehittynyttä ohjelmistollista ominaisuutta. 1) Helpon tavan luoda toimiva ohjelma sekä automaattinen, tarkka ja nopea radan muodostaminen. Graafinen käyttöliittymä helpottaa ohjelmien luomista. Ensin opetetaan manuaalisesti tarvittavat pisteet ja tämän jälkeen annetaan robotin automaattisesti seurata pintaa, johon pisteet on luotu, jolloin tapahtuu lopullinen radan muodostus.

20
21 2) FCPressure mahdollistaa robotin käytön hionnassa, kiillottamisessa ja työstössä siten, että voima pysyy vakiona työkalun ja työstettävän kappaleen välillä. Graafinen käyttöliittymä mahdollistaa selkeän ja yksinkertaisen parametrionnin. 3) FCSpeedChange mahdollistaa robotin käytön liikenopeuden valvontaan perustuvaan jäysteenpoistoon. Tällöin tunnistetaan esimerkiksi eri korkuiset hitsaussaumat muuttuvana työstövoimana, jolloin robotti hidastaa työstönopeuttaan ja toistaa paksumman kohdan hionnan useampaan kertaan.
22 Ominaisuuksia: - jopa 90%:n ajan säästö verrattuna perinteiseen ohjelmointitapaan - 20% nopeampi ohjelman kiertoaika - 20% pidempi työkalun käyttöikä - kallis - helppokäyttöinen - parempi työstön lopputulos Voimaohjauspaketti: - ohjelmistopaketti sisältäen graafisen käyttöliittymän - voima-anturin kaapeleineen ja kiinnitysadapterit - IRC5 ohjaimeen tarvittava liityntäkortti ATI Force Sensors In addition, ABB uses ATI Force/Torque sensors models Delta, Theta and Omega with IP60 or IP65 pr otection and Viton seals for aggressive environments
.")
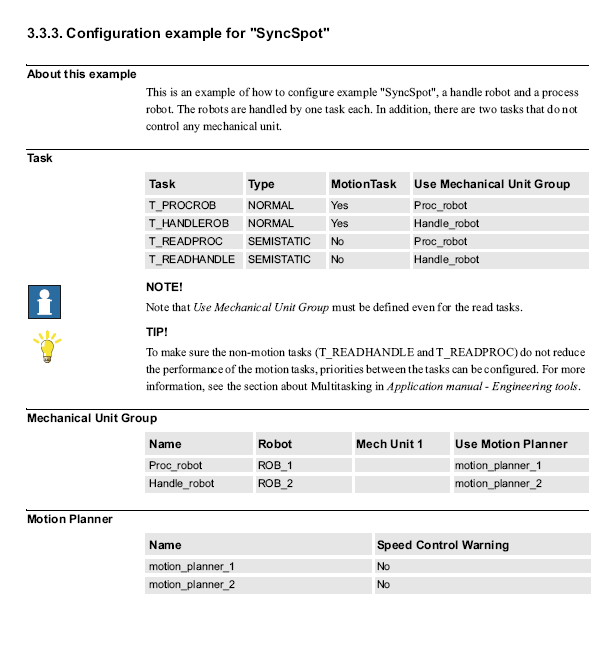
23 Multimove -toiminto, (Robot Studio-ohjelmassa) Laitteisto:Ohjainmoduuli, joka ohjaa samanaikaisesti useampia robotteja, tarvitsee lisäksi jokaiselle robotille oman liikeohjausmoduulin (max. neljä kappaletta, näistä yksi on integroitu ohjainmoduuliin). Järjestelmäparametrit
24 1) Synkronoimaton kahden robotin hitsausasema Molemmat robotit liikkuvat itsenäisesti eli eivät ole yhteistoiminnassa millään tavalla, eivätkä odota toinen toisiaan. Toinen hitsaa (ei käytetä kuitenkaan ArcL-käskyä, vaan MoveL-käskyä) suorakaiteen muotoisen sauman ja toinen ympyrän. Hallinta on kuitenkin yhden ohjainmoduulin takana ja ohjelma sisältää kaksi taskia.

25 KONFIGURAATIOT: Molemmille roboteille on omat taskit, T_ROB1 ja T_ROB2.
26 HARJOITUS Ensin luodaan uusia asema (Empty Station). Seuraavaksi valitaan kaksi haluttua robottimallia (ABB Library) sekä kaksi hitsauspoltinta (Import Library, Equipment). Robot System valikosta valitaan toiminto From Layout, jonka avulla luodaan robottisysteemi. Seuraavana tehtävänä on luoda edellisellä sivulla olevan kuvan mukainen graafinen ympäristö eli pöytätaso, särmiö ja sylinteri. Pöydän kulmaan tehdään käyttäjäkoordinaatisto HitsausPoyta ja sen suhteen kohdekoordinaatistot Sylinteri ja Kuutio. Jatketaan alla oleva ohjelma loppuun ja testataan toiminta. T_ROB1 task program Module module1 CONST robtarget p11:=. CONST robtarget p12:=. CONST robtarget p13:=. CONST robtarget p14:=. PERS tooldata AW_Gun:=[TRUE,[[119.5,0,352], [ ,0, ,0]],[10,[0,0,100], [1,0,0,0],. TASK PERS wobjdata Wobj_HitsausPoyta:=[FALSE,TRUE,"",[[800,- 1700,850],[1,0,0,0]],[[0,0,0],
27 TASK PERS wobjdata Wobj_Sylinteri:=[FALSE,TRUE,"",[[800,- 1700,850],[1,0,0,0]],[[ ,400,300], PROC main() MoveJ Kotipaikka, v1000, z50, IndependentMove; Stop; ENDPROC PROC IndependentMove() MoveL MoveL. MoveC MoveC. MoveL Return; ENDPROC T_ROB2 task program Module module2 CONST robtarget p21:=. CONST robtarget p22:=. CONST robtarget p23:=. CONST robtarget p24:=. PROC main() IndependentMove; Stop; ENDPROC PROC IndependentMove() MoveL MoveL. MoveL MoveL. MoveL Return; ENDPROC
28

29 2) Synkronoitu kahden robotin hitsausasema Molemmat robotit hitsaavat nyt samaa kappaletta, jota pyöritetään kääntölaitteen avulla eli käytössä on myös mekaaninen yksikkö. KONFIGURAATIOT: Molemmille roboteille on omat taskit, T_ROB1 ja T_ROB2 sekä kääntöpöydälle myös oma taskinsa T_STN1.
30
31 HARJOITUS 2 Ensin luodaan uusia asema (Empty Station). Seuraavaksi valitaan kaksi haluttua robottimallia (ABB Library) sekä kaksi hitsauspoltinta (Import Library, Equipment). Lisäksi valitaan haluttu kääntölaite (ABB Library). Robot System valikosta valitaan toiminto From Layout, jonka avulla luodaan robottisysteemi. Seuraavana tehtävänä on luoda edellisellä sivulla olevan kuvan mukainen hitsattava kappale. Jatketaan alla oleva ohjelma loppuun ja testataan toiminta. T_STN1 task program MODULE Module3 VAR syncident sync1; VAR syncident sync2; VAR syncident sync3; PERS tasks all_tasks{3}:=[["t_rob1"],["t_rob2"],["t_stn1"]]; CONST jointtarget angle_0:= [[9E9,9E9,9E9,9E9,9E9,9E9],[0,9E9,9E9,9E9,9E9,9E9]]; CONST jointtarget angle_neg90:= [[- 90,9E9,9E9,9E9,9E9,9E9],[0,9E9,9E9,9E9,9E9,9E9]]; ENDMODULE PROC main() ActUnit STN1; SemiSyncMove; ENDPROC PROC SemiSyncMove () MoveExtJ angle_0, vrot50, fine;!annetaan robottien liikkua WaitSyncTask sync1, all_tasks;! Odotetaan, että robotit ovat liikkuneet WaitSyncTask sync2, all_tasks; MoveExtJ angle_neg90, vrot50, fine; WaitSyncTask sync3, all_tasks; ENDPROC T_ROB1 task program MODULE Module1 PERS tooldata AW_Gun:=[TRUE,[[119.5,0,352], [ ,0, ,0]],[1,[0,0,100],[1,0,0,0],0,0,0]]; TASK PERS wobjdata wobj_stn1:=[false,false,"stn1",[[ , , ],[ , , , ]],[[0,0,250],[1,0,0,0]]]; VAR syncident sync1; VAR syncident sync2; VAR syncident sync3; PERS tasks all_tasks{3}:=[["t_rob1"],["t_rob2"],["t_stn1"]]; CONST robtarget alkupaikka:=[[ ,0.00, ],[ , E-08, , E-08],[0,0,- 1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
32 PROC main() MoveJ alkupaikka, v200, z50, AW_Gun\WObj:=wobj_stn1; SemiSyncMove; ENDPROC ENDMODULE PROC SemiSyncMove()! Odotetaan kääntöpöytää WaitSyncTask sync1, all_tasks;!kääntöpöytä liikkuu WaitSyncTask sync2, all_tasks;! Odotetaan kääntöpöytää WaitSyncTask sync3, all_tasks; ENDPROC T_ROB2 task program MODULE Module1 PERS tooldata AW_Gun:=[TRUE,[[119.5,0,352], [ ,0, ,0]],[1,[0,0,100],[1,0,0,0],0,0,0]]; TASK PERS wobjdata wobj_stn1:=[false,false,"stn1",[[ , , ],[ , , , ]],[[0,0,250],[1,0,0,0]]]; VAR syncident sync1; VAR syncident sync2; VAR syncident sync3; PERS tasks all_tasks{3}:=[["t_rob1"],["t_rob2"],["t_stn1"]]; CONST robtarget alkupaikka:=[[ , , ], [ , E-09, , E-09],[-1,0,- 1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]]; PROC main() MoveJ alkupaikka, v200, z50, AW_Gun\WObj:=wobj_stn1; SemiSyncMove; ENDPROC ENDMODULE PROC SemiSyncMove()! Odotetaan kääntöpöytää WaitSyncTask sync1, all_tasks;!kääntöpöytä liikkuu WaitSyncTask sync2, all_tasks;! Odotetaan kääntöpöytää WaitSyncTask sync3, all_tasks; ENDPROC
33
34
35
36
ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2014
 v. 2014") ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2014 Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Kuljettimelle 10 saapuva
ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2014 Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Kuljettimelle 10 saapuva
ROBOTIIKAN LABORATORIOTYÖ 2 ( )
") ROBOTIIKAN LABORATORIOTYÖ 2 (2016 17) Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Robotin tehtävänä on tyhjentää lava. Laatikot
ROBOTIIKAN LABORATORIOTYÖ 2 (2016 17) Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Robotin tehtävänä on tyhjentää lava. Laatikot
ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2015
 v. 2015") ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2015 Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Robotin tehtävänä on
ROBOTTIHARJOITUS IRB4400 ROBOTILLA, S4C (RYHMÄTYÖ) v. 2015 Toiminta: Robotti odottaa kotipisteessä käynnistystä. Odotusasento opetetaan noin 1.5 metrin korkeudelle lavan keskelle. Robotin tehtävänä on
RAPID-ohjelmointikielen peruskäskyjä ja rakenteita
 RAPID-ohjelmointikielen peruskäskyjä ja rakenteita Ohjelmamoduli, Mainmodule Ohjelmadata Num Numeeriset arvot (rekisterit, laskurit) Bool Loogiset arvot (tosi/epätosi, true/false) Robtarget Paikoitusdata
RAPID-ohjelmointikielen peruskäskyjä ja rakenteita Ohjelmamoduli, Mainmodule Ohjelmadata Num Numeeriset arvot (rekisterit, laskurit) Bool Loogiset arvot (tosi/epätosi, true/false) Robtarget Paikoitusdata
ATK tähtitieteessä. Osa 3 - IDL proseduurit ja rakenteet. 18. syyskuuta 2014
 18. syyskuuta 2014 IDL - proseduurit Viimeksi käsiteltiin IDL:n interaktiivista käyttöä, mutta tämä on hyvin kömpelöä monimutkaisempia asioita tehtäessä. IDL:llä on mahdollista tehdä ns. proseduuri-tiedostoja,
18. syyskuuta 2014 IDL - proseduurit Viimeksi käsiteltiin IDL:n interaktiivista käyttöä, mutta tämä on hyvin kömpelöä monimutkaisempia asioita tehtäessä. IDL:llä on mahdollista tehdä ns. proseduuri-tiedostoja,
IDL - proseduurit. ATK tähtitieteessä. IDL - proseduurit
 IDL - proseduurit 25. huhtikuuta 2017 Viimeksi käsiteltiin IDL:n interaktiivista käyttöä, mutta tämä on hyvin kömpelöä monimutkaisempia asioita tehtäessä. IDL:llä on mahdollista tehdä ns. proseduuri-tiedostoja,
IDL - proseduurit 25. huhtikuuta 2017 Viimeksi käsiteltiin IDL:n interaktiivista käyttöä, mutta tämä on hyvin kömpelöä monimutkaisempia asioita tehtäessä. IDL:llä on mahdollista tehdä ns. proseduuri-tiedostoja,
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 2.3.2009 T-106.1208 Ohjelmoinnin perusteet Y 2.3.2009 1 / 28 Puhelinluettelo, koodi def lue_puhelinnumerot(): print "Anna lisattavat nimet ja numerot." print
Ohjelmoinnin perusteet Y Python T-106.1208 2.3.2009 T-106.1208 Ohjelmoinnin perusteet Y 2.3.2009 1 / 28 Puhelinluettelo, koodi def lue_puhelinnumerot(): print "Anna lisattavat nimet ja numerot." print
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 15.3.2010 T-106.1208 Ohjelmoinnin perusteet Y 15.3.2010 1 / 56 Tiedostoista: tietojen tallentaminen ohjelman suorituskertojen välillä Monissa sovelluksissa ohjelman
Ohjelmoinnin perusteet Y Python T-106.1208 15.3.2010 T-106.1208 Ohjelmoinnin perusteet Y 15.3.2010 1 / 56 Tiedostoista: tietojen tallentaminen ohjelman suorituskertojen välillä Monissa sovelluksissa ohjelman
Ohjelmoinnin peruskurssi Y1
 Ohjelmoinnin peruskurssi Y1 CSE-A1111 30.9.2015 CSE-A1111 Ohjelmoinnin peruskurssi Y1 30.9.2015 1 / 27 Mahdollisuus antaa luentopalautetta Goblinissa vasemmassa reunassa olevassa valikossa on valinta Luentopalaute.
Ohjelmoinnin peruskurssi Y1 CSE-A1111 30.9.2015 CSE-A1111 Ohjelmoinnin peruskurssi Y1 30.9.2015 1 / 27 Mahdollisuus antaa luentopalautetta Goblinissa vasemmassa reunassa olevassa valikossa on valinta Luentopalaute.
Hammastankohissin modernisointi. Heikki Laitasalmi
 Hammastankohissin modernisointi Heikki Laitasalmi Loppudemossa Mitä oltiinkaan tekemässä V-malli Modbus viestintä (PLC VFD) Esitellään laitteet Lopuksi Modbusia käytännössä Hammastankohissi Arkkitehtuuri
Hammastankohissin modernisointi Heikki Laitasalmi Loppudemossa Mitä oltiinkaan tekemässä V-malli Modbus viestintä (PLC VFD) Esitellään laitteet Lopuksi Modbusia käytännössä Hammastankohissi Arkkitehtuuri
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 2.3.2011 T-106.1208 Ohjelmoinnin perusteet Y 2.3.2011 1 / 39 Kertausta: tiedoston avaaminen Kun ohjelma haluaa lukea tai kirjoittaa tekstitiedostoon, on ohjelmalle
Ohjelmoinnin perusteet Y Python T-106.1208 2.3.2011 T-106.1208 Ohjelmoinnin perusteet Y 2.3.2011 1 / 39 Kertausta: tiedoston avaaminen Kun ohjelma haluaa lukea tai kirjoittaa tekstitiedostoon, on ohjelmalle
Koottu lause; { ja } -merkkien väliin kirjoitetut lauseet muodostavat lohkon, jonka sisällä lauseet suoritetaan peräkkäin.
 2. Ohjausrakenteet Ohjausrakenteiden avulla ohjataan ohjelman suoritusta. peräkkäisyys valinta toisto Koottu lause; { ja } -merkkien väliin kirjoitetut lauseet muodostavat lohkon, jonka sisällä lauseet
2. Ohjausrakenteet Ohjausrakenteiden avulla ohjataan ohjelman suoritusta. peräkkäisyys valinta toisto Koottu lause; { ja } -merkkien väliin kirjoitetut lauseet muodostavat lohkon, jonka sisällä lauseet
Machine Control Studio - Kuinka päästä alkuun. Ohjelmointiympäristö Unidrive M ja MCi2x0 laitteille
 Machine Control Studio - Kuinka päästä alkuun Ohjelmointiympäristö Unidrive M ja MCi2x0 laitteille Mistä aloittaa? Machine Control Studion lataaminen ja asennus. MCS käynnistys ja uuden projektin luonti.
Machine Control Studio - Kuinka päästä alkuun Ohjelmointiympäristö Unidrive M ja MCi2x0 laitteille Mistä aloittaa? Machine Control Studion lataaminen ja asennus. MCS käynnistys ja uuden projektin luonti.
Pong-peli, vaihe Koordinaatistosta. Muilla kielillä: English Suomi. Tämä on Pong-pelin tutoriaalin osa 2/7. Tämän vaiheen aikana
 Muilla kielillä: English Suomi Pong-peli, vaihe 2 Tämä on Pong-pelin tutoriaalin osa 2/7. Tämän vaiheen aikana Laitetaan pallo liikkeelle Tehdään kentälle reunat Vaihdetaan kentän taustaväri Zoomataan
Muilla kielillä: English Suomi Pong-peli, vaihe 2 Tämä on Pong-pelin tutoriaalin osa 2/7. Tämän vaiheen aikana Laitetaan pallo liikkeelle Tehdään kentälle reunat Vaihdetaan kentän taustaväri Zoomataan
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 16.2.2010 T-106.1208 Ohjelmoinnin perusteet Y 16.2.2010 1 / 41 Kännykkäpalautetteen antajia kaivataan edelleen! Ilmoittaudu mukaan lähettämällä ilmainen tekstiviesti
Ohjelmoinnin perusteet Y Python T-106.1208 16.2.2010 T-106.1208 Ohjelmoinnin perusteet Y 16.2.2010 1 / 41 Kännykkäpalautetteen antajia kaivataan edelleen! Ilmoittaudu mukaan lähettämällä ilmainen tekstiviesti
PEM1123/ 410993A. Asennus- ja käyttöohje SW/S2.5 viikkokello. ABB i-bus KNX. SW/S2.5 Viikkokello
 PEM1123/ 410993A Asennus- ja käyttöohje SW/S2.5 viikkokello ABB i-bus KNX SW/S2.5 Viikkokello Sisällysluettelo 1.0 Kuvaus 1.1 Laitteen käyttö...3 1.2 Ominaisuudet...3 1.3 Näppäimet ja osat...4 1.4 Tekniset
PEM1123/ 410993A Asennus- ja käyttöohje SW/S2.5 viikkokello ABB i-bus KNX SW/S2.5 Viikkokello Sisällysluettelo 1.0 Kuvaus 1.1 Laitteen käyttö...3 1.2 Ominaisuudet...3 1.3 Näppäimet ja osat...4 1.4 Tekniset
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 1.4.2009 T-106.1208 Ohjelmoinnin perusteet Y 1.4.2009 1 / 56 Tentti Ensimmäinen tenttimahdollisuus on pe 8.5. klo 13:00 17:00 päärakennuksessa. Tämän jälkeen
Ohjelmoinnin perusteet Y Python T-106.1208 1.4.2009 T-106.1208 Ohjelmoinnin perusteet Y 1.4.2009 1 / 56 Tentti Ensimmäinen tenttimahdollisuus on pe 8.5. klo 13:00 17:00 päärakennuksessa. Tämän jälkeen
1.1 Pino (stack) Koodiluonnos. Graafinen esitys ...
 Koodiluonnos. Graafinen esitys ...") 1. Tietorakenteet Tietorakenteet organisoivat samankaltaisten olioiden muodostaman tietojoukon. Tämä järjestys voidaan saada aikaan monin tavoin, esim. Keräämällä oliot taulukkoon. Liittämällä olioihin
1. Tietorakenteet Tietorakenteet organisoivat samankaltaisten olioiden muodostaman tietojoukon. Tämä järjestys voidaan saada aikaan monin tavoin, esim. Keräämällä oliot taulukkoon. Liittämällä olioihin
Ohjelmoinnin peruskurssi Y1
 Ohjelmoinnin peruskurssi Y1 CS-A1111 13.9.2017 CS-A1111 Ohjelmoinnin peruskurssi Y1 13.9.2017 1 / 19 Oppimistavoitteet: tämän luennon jälkeen osaat kirjoittaa Python-ohjelman, joka pyytää käyttäjältä lukuja,
Ohjelmoinnin peruskurssi Y1 CS-A1111 13.9.2017 CS-A1111 Ohjelmoinnin peruskurssi Y1 13.9.2017 1 / 19 Oppimistavoitteet: tämän luennon jälkeen osaat kirjoittaa Python-ohjelman, joka pyytää käyttäjältä lukuja,
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 28.2.2011 T-106.1208 Ohjelmoinnin perusteet Y 28.2.2011 1 / 46 Ohjelmointiprojektin vaiheet 1. Määrittely 2. Ohjelman suunnittelu (ohjelman rakenne ja ohjelman
Ohjelmoinnin perusteet Y Python T-106.1208 28.2.2011 T-106.1208 Ohjelmoinnin perusteet Y 28.2.2011 1 / 46 Ohjelmointiprojektin vaiheet 1. Määrittely 2. Ohjelman suunnittelu (ohjelman rakenne ja ohjelman
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 1.3.2010 T-106.1208 Ohjelmoinnin perusteet Y 1.3.2010 1 / 36 Monikko Monikko (engl. tuple) muistuttaa listaa, mutta monikon sisältöä ei voi muuttaa sen jälkeen,
Ohjelmoinnin perusteet Y Python T-106.1208 1.3.2010 T-106.1208 Ohjelmoinnin perusteet Y 1.3.2010 1 / 36 Monikko Monikko (engl. tuple) muistuttaa listaa, mutta monikon sisältöä ei voi muuttaa sen jälkeen,
Peilaus pisteen ja suoran suhteen Pythonin Turtle moduulilla
 Peilaus pisteen ja suoran suhteen Pythonin Turtle moduulilla ALKUHARJOITUS Kynän ja paperin avulla peilaaminen koordinaatistossa a) Peilaa pisteen (0,0) suhteen koordinaatistossa sijaitseva - neliö, jonka
Peilaus pisteen ja suoran suhteen Pythonin Turtle moduulilla ALKUHARJOITUS Kynän ja paperin avulla peilaaminen koordinaatistossa a) Peilaa pisteen (0,0) suhteen koordinaatistossa sijaitseva - neliö, jonka
Ohjeita Siemens Step7, Omron CX Programmer käyttöön
 Ohjeita Siemens Step7, Omron CX Programmer käyttöön Sisällysluettelo 1 Siemens Step7 Manager...1 1.1 Laitteistomäärittely...1 1.2 Ohjelmalohkon luonti ja toteutus...2 1.3 Ohjelman kutsu...3 2 CX-Programmer...4
Ohjeita Siemens Step7, Omron CX Programmer käyttöön Sisällysluettelo 1 Siemens Step7 Manager...1 1.1 Laitteistomäärittely...1 1.2 Ohjelmalohkon luonti ja toteutus...2 1.3 Ohjelman kutsu...3 2 CX-Programmer...4
Harjoitus 7. 1. Olkoon olemassa luokat Lintu ja Pelikaani seuraavasti:
 Harjoitus 7 1. Olkoon olemassa luokat Lintu ja Pelikaani seuraavasti: class Lintu //Kentät private int _siivenpituus; protected double _aivojenkoko; private bool _osaakolentaa; //Ominaisuudet public int
Harjoitus 7 1. Olkoon olemassa luokat Lintu ja Pelikaani seuraavasti: class Lintu //Kentät private int _siivenpituus; protected double _aivojenkoko; private bool _osaakolentaa; //Ominaisuudet public int
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 2.2.2011 T-106.1208 Ohjelmoinnin perusteet Y 2.2.2011 1 / 37 Kännykkäpalautetteen antajia kaivataan edelleen! Ilmoittaudu mukaan lähettämällä ilmainen tekstiviesti
Ohjelmoinnin perusteet Y Python T-106.1208 2.2.2011 T-106.1208 Ohjelmoinnin perusteet Y 2.2.2011 1 / 37 Kännykkäpalautetteen antajia kaivataan edelleen! Ilmoittaudu mukaan lähettämällä ilmainen tekstiviesti
Harjoitustyö: virtuaalikone
 Harjoitustyö: virtuaalikone Toteuta alla kuvattu virtuaalikone yksinkertaiselle olio-orientoituneelle skriptauskielelle. Paketissa on testaamista varten mukana kaksi lyhyttä ohjelmaa. Ohjeita Noudata ohjelman
Harjoitustyö: virtuaalikone Toteuta alla kuvattu virtuaalikone yksinkertaiselle olio-orientoituneelle skriptauskielelle. Paketissa on testaamista varten mukana kaksi lyhyttä ohjelmaa. Ohjeita Noudata ohjelman
SAC RDS Futurline MAX Tupla-robotin ohjeet näytteenottoon ja päivämaidon lähetykseen
 RDS - ohjeet 1 (18) SAC RDS Futurline MAX Tupla-robotin ohjeet näytteenottoon ja päivämaidon lähetykseen Näytteenoton aloittaminen Shuttlen säädöt robotilla Telineen vaihto Näytteenoton lopettaminen Näyteraportin
RDS - ohjeet 1 (18) SAC RDS Futurline MAX Tupla-robotin ohjeet näytteenottoon ja päivämaidon lähetykseen Näytteenoton aloittaminen Shuttlen säädöt robotilla Telineen vaihto Näytteenoton lopettaminen Näyteraportin
NOOX xperio herätyskello valvontakamera
 NOOX xperio herätyskello valvontakamera Käyttöohje Ajan asetus Kun kellonaika on näytössä paina SET, ruudulla lukee nyt "2010" Aseta oikea aika UP ja DOWN näppäimillä ja paina SET uudelleen vahvistaakseni
NOOX xperio herätyskello valvontakamera Käyttöohje Ajan asetus Kun kellonaika on näytössä paina SET, ruudulla lukee nyt "2010" Aseta oikea aika UP ja DOWN näppäimillä ja paina SET uudelleen vahvistaakseni
LUMECOM. Jyrsinsovellus. 1. Asennusohje 2. Käyttöohje 3. Käyttöönottokortti
 LUMECOM Jyrsinsovellus 1. Asennusohje 2. Käyttöohje 3. Käyttöönottokortti 11.4.2018 Asennusohje - ProJyrsin 1. Avaa Google Play Store tabletiltasi - sovellus ei tue toistaiseksi Apple/IOS käyttöjärjestelmiä
LUMECOM Jyrsinsovellus 1. Asennusohje 2. Käyttöohje 3. Käyttöönottokortti 11.4.2018 Asennusohje - ProJyrsin 1. Avaa Google Play Store tabletiltasi - sovellus ei tue toistaiseksi Apple/IOS käyttöjärjestelmiä
Operaattoreiden ylikuormitus. Operaattoreiden kuormitus. Operaattoreiden kuormitus. Operaattoreista. Kuormituksesta
 C++ - perusteet Java-osaajille luento 5/7: operaattoreiden ylikuormitus, oliotaulukko, parametrien oletusarvot, komentoriviparametrit, constant, inline, Operaattoreiden ylikuormitus Operaattoreiden kuormitus
C++ - perusteet Java-osaajille luento 5/7: operaattoreiden ylikuormitus, oliotaulukko, parametrien oletusarvot, komentoriviparametrit, constant, inline, Operaattoreiden ylikuormitus Operaattoreiden kuormitus
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 20.1.2010 T-106.1208 Ohjelmoinnin perusteet Y 20.1.2010 1 / 40 Arvon pyytäminen käyttäjältä Käyttäjän antaman arvon voi lukea raw_input-käskyllä. Käskyn sulkujen
Ohjelmoinnin perusteet Y Python T-106.1208 20.1.2010 T-106.1208 Ohjelmoinnin perusteet Y 20.1.2010 1 / 40 Arvon pyytäminen käyttäjältä Käyttäjän antaman arvon voi lukea raw_input-käskyllä. Käskyn sulkujen
Ohjelmoinnin peruskurssi Y1
 Ohjelmoinnin peruskurssi Y1 CS-A1111 14.9.2016 CS-A1111 Ohjelmoinnin peruskurssi Y1 14.9.2016 1 / 19 Oppimistavoitteet: tämän luennon jälkeen osaat kirjoittaa Python-ohjelman, joka pyytää käyttäjältä lukuja,
Ohjelmoinnin peruskurssi Y1 CS-A1111 14.9.2016 CS-A1111 Ohjelmoinnin peruskurssi Y1 14.9.2016 1 / 19 Oppimistavoitteet: tämän luennon jälkeen osaat kirjoittaa Python-ohjelman, joka pyytää käyttäjältä lukuja,
Palauta jokainen funktio-tiedosto. Esitä myös funktiot vastauspaperissasi.
 Tehtävä 1 Kirjoita neljä eri funktiota (1/2 pistettä/funktio): 1. Funktio T tra saa herätteenä 3x1-kokoisen paikkavektorin p. Se palauttaa 4x4 muunnosmatriisin, johon sijoitettu p:n koordinaattien mukainen
Tehtävä 1 Kirjoita neljä eri funktiota (1/2 pistettä/funktio): 1. Funktio T tra saa herätteenä 3x1-kokoisen paikkavektorin p. Se palauttaa 4x4 muunnosmatriisin, johon sijoitettu p:n koordinaattien mukainen
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 3.2.2010 T-106.1208 Ohjelmoinnin perusteet Y 3.2.2010 1 / 36 Esimerkki: asunnon välityspalkkio Kirjoitetaan ohjelma, joka laskee kiinteistönvälittäjän asunnon
Ohjelmoinnin perusteet Y Python T-106.1208 3.2.2010 T-106.1208 Ohjelmoinnin perusteet Y 3.2.2010 1 / 36 Esimerkki: asunnon välityspalkkio Kirjoitetaan ohjelma, joka laskee kiinteistönvälittäjän asunnon
1 Muutokset piirilevylle
 1 Muutokset piirilevylle Seuraavat muutokset täytyvät olla piirilevylle tehtynä, jotta tätä käyttöohjetta voidaan käyttää. Jumppereiden JP5, JP6, JP7, sekä JP8 ja C201 väliltä puuttuvat signaalivedot on
1 Muutokset piirilevylle Seuraavat muutokset täytyvät olla piirilevylle tehtynä, jotta tätä käyttöohjetta voidaan käyttää. Jumppereiden JP5, JP6, JP7, sekä JP8 ja C201 väliltä puuttuvat signaalivedot on
1 YLEISTÄ. Taitaja2002, Imatra Teollisuuselektroniikkatyö Protorakentelu 1.1 PROJEKTIN TARKOITUS
 Taitaja2002, Imatra Teollisuuselektroniikkatyö Protorakentelu 1 YLEISTÄ 1.1 PROJEKTIN TARKOITUS Tämä projekti on mikrokontrollerilla toteutettu lämpötilan seuranta kortti. Kortti kerää lämpöantureilta
Taitaja2002, Imatra Teollisuuselektroniikkatyö Protorakentelu 1 YLEISTÄ 1.1 PROJEKTIN TARKOITUS Tämä projekti on mikrokontrollerilla toteutettu lämpötilan seuranta kortti. Kortti kerää lämpöantureilta
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää
 Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
MATEMATIIKKA 5 VIIKKOTUNTIA
 EB-TUTKINTO 2010 MATEMATIIKKA 5 VIIKKOTUNTIA PÄIVÄMÄÄRÄ: 4. kesäkuuta 2010 KOKEEN KESTO: 4 tuntia (240 minuuttia) SALLITUT APUVÄLINEET: Eurooppa-koulun antama taulukkovihkonen Funktiolaskin, joka ei saa
EB-TUTKINTO 2010 MATEMATIIKKA 5 VIIKKOTUNTIA PÄIVÄMÄÄRÄ: 4. kesäkuuta 2010 KOKEEN KESTO: 4 tuntia (240 minuuttia) SALLITUT APUVÄLINEET: Eurooppa-koulun antama taulukkovihkonen Funktiolaskin, joka ei saa
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 19.1.2011 T-106.1208 Ohjelmoinnin perusteet Y 19.1.2011 1 / 39 Haluatko antaa palautetta luennoista? Ilmoittaudu mukaan lähettämällä ilmainen tekstiviesti Vast
Ohjelmoinnin perusteet Y Python T-106.1208 19.1.2011 T-106.1208 Ohjelmoinnin perusteet Y 19.1.2011 1 / 39 Haluatko antaa palautetta luennoista? Ilmoittaudu mukaan lähettämällä ilmainen tekstiviesti Vast
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 3.3.2010 T-106.1208 Ohjelmoinnin perusteet Y 3.3.2010 1 / 44 Kertausta: tiedoston avaaminen Kun ohjelma haluaa lukea tai kirjoittaa tekstitiedostoon, on ohjelmalle
Ohjelmoinnin perusteet Y Python T-106.1208 3.3.2010 T-106.1208 Ohjelmoinnin perusteet Y 3.3.2010 1 / 44 Kertausta: tiedoston avaaminen Kun ohjelma haluaa lukea tai kirjoittaa tekstitiedostoon, on ohjelmalle
Luento 5. Timo Savola. 28. huhtikuuta 2006
 UNIX-käyttöjärjestelmä Luento 5 Timo Savola 28. huhtikuuta 2006 Osa I Shell-ohjelmointi Ehtolause Lausekkeet suoritetaan jos ehtolausekkeen paluuarvo on 0 if ehtolauseke then lauseke
UNIX-käyttöjärjestelmä Luento 5 Timo Savola 28. huhtikuuta 2006 Osa I Shell-ohjelmointi Ehtolause Lausekkeet suoritetaan jos ehtolausekkeen paluuarvo on 0 if ehtolauseke then lauseke
1 Tekniset tiedot: 2 Asennus: Asennus. Liitännät
 Viitteet 000067 - Fi ASENNUS ohje inteo Soliris Sensor RTS Soliris Sensor RTS on aurinko- & tuulianturi aurinko- & tuuliautomatiikalla varustettuihin Somfy Altus RTS- ja Orea RTS -moottoreihin. Moottorit
Viitteet 000067 - Fi ASENNUS ohje inteo Soliris Sensor RTS Soliris Sensor RTS on aurinko- & tuulianturi aurinko- & tuuliautomatiikalla varustettuihin Somfy Altus RTS- ja Orea RTS -moottoreihin. Moottorit
2 Pistejoukko koordinaatistossa
 Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Määrittelydokumentti
 Määrittelydokumentti Aineopintojen harjoitustyö: Tietorakenteet ja algoritmit (alkukesä) Sami Korhonen 014021868 sami.korhonen@helsinki. Tietojenkäsittelytieteen laitos Helsingin yliopisto 23. kesäkuuta
Määrittelydokumentti Aineopintojen harjoitustyö: Tietorakenteet ja algoritmit (alkukesä) Sami Korhonen 014021868 sami.korhonen@helsinki. Tietojenkäsittelytieteen laitos Helsingin yliopisto 23. kesäkuuta
Makrojen mystinen maailma lyhyt oppimäärä
 Makrojen mystinen maailma lyhyt oppimäärä Makrot osana SAS-teknologiaa Yleiskuva Jouni Javanainen Aureolis lyhyesti Aureolis on jatkuvia Business Intelligence -palveluita tuottava asiantuntijaorganisaatio
Makrojen mystinen maailma lyhyt oppimäärä Makrot osana SAS-teknologiaa Yleiskuva Jouni Javanainen Aureolis lyhyesti Aureolis on jatkuvia Business Intelligence -palveluita tuottava asiantuntijaorganisaatio
Säätökeskus RVA36.531
 Säätökeskus Asennusohje 1. Johdanto Tämä ohje koskee säätökeskusta joka on tarkoitettu lämmönsäätöön pientaloissa jossa on vesikiertoinen lämmitysjärjestelmä.ohje tulee säilyttää lähellä säädintä.. Säätökeskus
Säätökeskus Asennusohje 1. Johdanto Tämä ohje koskee säätökeskusta joka on tarkoitettu lämmönsäätöön pientaloissa jossa on vesikiertoinen lämmitysjärjestelmä.ohje tulee säilyttää lähellä säädintä.. Säätökeskus
DIODIN OMINAISKÄYRÄ TRANSISTORIN OMINAISKÄYRÄSTÖ
 1 IOIN OMINAISKÄYRÄ JA TRANSISTORIN OMINAISKÄYRÄSTÖ MOTIVOINTI Työ opettaa mittaamaan erityyppisten diodien ominaiskäyrät käyttämällä oskilloskooppia XYpiirturina Työssä opetellaan mittaamaan transistorin
1 IOIN OMINAISKÄYRÄ JA TRANSISTORIN OMINAISKÄYRÄSTÖ MOTIVOINTI Työ opettaa mittaamaan erityyppisten diodien ominaiskäyrät käyttämällä oskilloskooppia XYpiirturina Työssä opetellaan mittaamaan transistorin
Alkuarvot ja tyyppimuunnokset (1/5) Alkuarvot ja tyyppimuunnokset (2/5) Alkuarvot ja tyyppimuunnokset (3/5)
 Alkuarvot ja tyyppimuunnokset (2/5) Alkuarvot ja tyyppimuunnokset (3/5)") Alkuarvot ja tyyppimuunnokset (1/5) Aiemmin olemme jo antaneet muuttujille alkuarvoja, esimerkiksi: int luku = 123; Alkuarvon on oltava muuttujan tietotyypin mukainen, esimerkiksi int-muuttujilla kokonaisluku,
Alkuarvot ja tyyppimuunnokset (1/5) Aiemmin olemme jo antaneet muuttujille alkuarvoja, esimerkiksi: int luku = 123; Alkuarvon on oltava muuttujan tietotyypin mukainen, esimerkiksi int-muuttujilla kokonaisluku,
Harjoitus Particle View
 LIITE 2 1(5) Harjoitus Particle View Harjoituksessa käsiteltävät asiat: Partikkelien luominen Particle systemsin kautta Partikkelien luominen tyhjästä Particle viewin kautta Partikkelien ja tapahtumien
LIITE 2 1(5) Harjoitus Particle View Harjoituksessa käsiteltävät asiat: Partikkelien luominen Particle systemsin kautta Partikkelien luominen tyhjästä Particle viewin kautta Partikkelien ja tapahtumien
Koordinaatistot 1/6 Sisältö ESITIEDOT: reaaliluvut
 Koordinaatistot 1/6 Sisältö Koordinaatiston ja koordinaattien käsite Geometrisissa tehtävissä ja siten mös monissa kätännön ongelmissa on usein tarpeen ilmoittaa pisteiden sijainti jonkin kiinteän vertailussteemin
Koordinaatistot 1/6 Sisältö Koordinaatiston ja koordinaattien käsite Geometrisissa tehtävissä ja siten mös monissa kätännön ongelmissa on usein tarpeen ilmoittaa pisteiden sijainti jonkin kiinteän vertailussteemin
Kamera ohjelmoidaan ensin tunnistamaan kortit ja lähettämään tieto sarjaliikenneporttiin Data-linkin avulla.
 Ohjausjärjestelmien jatkokurssi kevät 2006 Laboraatiot 7-12 Laboraatio 7. Konenäkö robotiikassa Konenäkökamera liitetään robottiohjaimeen. Järjestelmä ohjelmoidaan niin, että robotti lajittelee kappaleita
Ohjausjärjestelmien jatkokurssi kevät 2006 Laboraatiot 7-12 Laboraatio 7. Konenäkö robotiikassa Konenäkökamera liitetään robottiohjaimeen. Järjestelmä ohjelmoidaan niin, että robotti lajittelee kappaleita
TAITAJA 2007 ELEKTRONIIKKAFINAALI 31.01-02.02.07 KILPAILIJAN TEHTÄVÄT. Kilpailijan nimi / Nro:
 KILPAILIJAN TEHTÄVÄT Kilpailijan nimi / Nro: Tehtävän laatinut: Hannu Laurikainen, Deltabit Oy Kilpailutehtävä Kilpailijalle annetaan tehtävässä tarvittavat ohjelmakoodit. Tämä ohjelma on tehty laitteen
KILPAILIJAN TEHTÄVÄT Kilpailijan nimi / Nro: Tehtävän laatinut: Hannu Laurikainen, Deltabit Oy Kilpailutehtävä Kilpailijalle annetaan tehtävässä tarvittavat ohjelmakoodit. Tämä ohjelma on tehty laitteen
Pythonin Kertaus. Cse-a1130. Tietotekniikka Sovelluksissa. Versio 0.01b
 Pythonin Kertaus Cse-a1130 Tietotekniikka Sovelluksissa Versio 0.01b Listat 1/2 esimerkkejä listan peruskäytöstä. > lista=['kala','kukko','kissa','koira'] ['kala','kukko','kissa','koira'] >lista.append('kana')
Pythonin Kertaus Cse-a1130 Tietotekniikka Sovelluksissa Versio 0.01b Listat 1/2 esimerkkejä listan peruskäytöstä. > lista=['kala','kukko','kissa','koira'] ['kala','kukko','kissa','koira'] >lista.append('kana')
Ohjelmoinnin peruskurssi Y1
 Ohjelmoinnin peruskurssi Y1 CSE-A1111 9.9.2015 CSE-A1111 Ohjelmoinnin peruskurssi Y1 9.9.2015 1 / 26 Mahdollisuus antaa luentopalautetta Goblinissa vasemmassa reunassa olevassa valikossa on valinta Luentopalaute.
Ohjelmoinnin peruskurssi Y1 CSE-A1111 9.9.2015 CSE-A1111 Ohjelmoinnin peruskurssi Y1 9.9.2015 1 / 26 Mahdollisuus antaa luentopalautetta Goblinissa vasemmassa reunassa olevassa valikossa on valinta Luentopalaute.
OHJELMOINTILAITE 10/50
 OHJELMOINTILAITE 10/50 1 2 3 4 5 6 17 16 15 7 14 8 13 12 11 10 9 1) Näyttö 1 taivutuksen nro. 2) Näyttö 2 kulma 3) LED merkkivalo MANUAALI 4) OFF-SET. 5) Taivutussuunta. 6) Palautus 7) Käynnistys ja resetointi.
OHJELMOINTILAITE 10/50 1 2 3 4 5 6 17 16 15 7 14 8 13 12 11 10 9 1) Näyttö 1 taivutuksen nro. 2) Näyttö 2 kulma 3) LED merkkivalo MANUAALI 4) OFF-SET. 5) Taivutussuunta. 6) Palautus 7) Käynnistys ja resetointi.
Preliminäärikoe Tehtävät Pitkä matematiikka 4.2.2014 1 / 3
 Preliminäärikoe Tehtävät Pitkä matematiikka / Kokeessa saa vastata enintään kymmeneen tehtävään Tähdellä (* merkittyjen tehtävien maksimipistemäärä on 9, muiden tehtävien maksimipistemäärä on 6 Jos tehtävässä
Preliminäärikoe Tehtävät Pitkä matematiikka / Kokeessa saa vastata enintään kymmeneen tehtävään Tähdellä (* merkittyjen tehtävien maksimipistemäärä on 9, muiden tehtävien maksimipistemäärä on 6 Jos tehtävässä
Algoritmit 1. Demot Timo Männikkö
 Algoritmit 1 Demot 1 31.1.-1.2.2018 Timo Männikkö Tehtävä 1 (a) Algoritmi, joka tutkii onko kokonaisluku tasan jaollinen jollain toisella kokonaisluvulla siten, että ei käytetä lainkaan jakolaskuja Jaettava
Algoritmit 1 Demot 1 31.1.-1.2.2018 Timo Männikkö Tehtävä 1 (a) Algoritmi, joka tutkii onko kokonaisluku tasan jaollinen jollain toisella kokonaisluvulla siten, että ei käytetä lainkaan jakolaskuja Jaettava
Nämä ohjeet sisältävät tietoja laitteen käytöstä ja ne on säilytettävä laitteen yhteydessä. Elektrodikattilat
 Nämä ohjeet sisältävät tietoja laitteen käytöstä ja ne on säilytettävä laitteen yhteydessä. Elektrodikatt Aakkosnumeerinen näyttömoduuli Käyttöopas 2. painos Asennukset maissa, joita EY-direktiivit koskevat:
Nämä ohjeet sisältävät tietoja laitteen käytöstä ja ne on säilytettävä laitteen yhteydessä. Elektrodikatt Aakkosnumeerinen näyttömoduuli Käyttöopas 2. painos Asennukset maissa, joita EY-direktiivit koskevat:
Muuttujien roolit Kiintoarvo cin >> r;
 Muuttujien roolit Muuttujilla on ohjelmissa eräitä tyypillisiä käyttötapoja, joita kutsutaan muuttujien rooleiksi. Esimerkiksi muuttuja, jonka arvoa ei muuteta enää kertaakaan muuttujan alustamisen jälkeen,
Muuttujien roolit Muuttujilla on ohjelmissa eräitä tyypillisiä käyttötapoja, joita kutsutaan muuttujien rooleiksi. Esimerkiksi muuttuja, jonka arvoa ei muuteta enää kertaakaan muuttujan alustamisen jälkeen,
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 18.3.2009 T-106.1208 Ohjelmoinnin perusteet Y 18.3.2009 1 / 51 Olioista (kertausta) Olioiden avulla voidaan kuvata useammasta arvosta koostuvaa kokonaisuutta
Ohjelmoinnin perusteet Y Python T-106.1208 18.3.2009 T-106.1208 Ohjelmoinnin perusteet Y 18.3.2009 1 / 51 Olioista (kertausta) Olioiden avulla voidaan kuvata useammasta arvosta koostuvaa kokonaisuutta
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 21.1.2009 T-106.1208 Ohjelmoinnin perusteet Y 21.1.2009 1 / 32 Tyypeistä Monissa muissa ohjelmointikielissä (esim. Java ja C) muuttujat on määriteltävä ennen
Ohjelmoinnin perusteet Y Python T-106.1208 21.1.2009 T-106.1208 Ohjelmoinnin perusteet Y 21.1.2009 1 / 32 Tyypeistä Monissa muissa ohjelmointikielissä (esim. Java ja C) muuttujat on määriteltävä ennen
Käyttäjän käsikirja. LIB 500 ja LIB 510 v.4.0.2. 8.2. Releasettelutyökalu. 8.2.1. Yleistä. ,NNXQDMRNDLOPRLWWDDHWWlNRKGHRQSlLYLWHWWlYl
 1MRS751368-RUM Käyttäjän käsikirja 8.1. Releyksikön valitseminen Releyksiköt esitetään asemakuvassa painikkeina. 8 $VHPDNXYDMRVVDQlN\\UHOH\NVLNN Jos kohteita tarvitsee päivittää, avataan ikkuna (Kuva 8.1.-2)
1MRS751368-RUM Käyttäjän käsikirja 8.1. Releyksikön valitseminen Releyksiköt esitetään asemakuvassa painikkeina. 8 $VHPDNXYDMRVVDQlN\\UHOH\NVLNN Jos kohteita tarvitsee päivittää, avataan ikkuna (Kuva 8.1.-2)
Luvun 10 laskuesimerkit
 Luvun 10 laskuesimerkit Esimerkki 11.1 Sigge-serkku tasapainoilee sahapukkien varaan asetetulla tasapaksulla puomilla, jonka pituus L = 6.0 m ja massa M = 90 kg. Sahapukkien huippujen välimatka D = 1.5
Luvun 10 laskuesimerkit Esimerkki 11.1 Sigge-serkku tasapainoilee sahapukkien varaan asetetulla tasapaksulla puomilla, jonka pituus L = 6.0 m ja massa M = 90 kg. Sahapukkien huippujen välimatka D = 1.5
1 2 x2 + 1 dx. (2p) x + 2dx. Kummankin integraalin laskeminen oikein (vastaukset 12 ja 20 ) antaa erikseen (2p) (integraalifunktiot
 x + 2dx. Kummankin integraalin laskeminen oikein (vastaukset 12 ja 20 ) antaa erikseen (2p) (integraalifunktiot") Helsingin yliopisto, Itä-Suomen yliopisto, Jyväskylän yliopisto, Oulun yliopisto, Tampereen yliopisto ja Turun yliopisto Matematiikan valintakoe (Ratkaisut ja pisteytys) 500 Kustakin tehtävästä saa maksimissaan
Helsingin yliopisto, Itä-Suomen yliopisto, Jyväskylän yliopisto, Oulun yliopisto, Tampereen yliopisto ja Turun yliopisto Matematiikan valintakoe (Ratkaisut ja pisteytys) 500 Kustakin tehtävästä saa maksimissaan
Teknillinen korkeakoulu T-76.115 Tietojenkäsittelyopin ohjelmatyö. Testitapaukset - Xlet
 Testitapaukset - Xlet Sisällysluettelo 1. Johdanto...3 2. Testattava järjestelmä...4 2.1 Koko järjestelmän yleiskuvaus...4 2.2 Xlet-demosovellus ja sen toimintaperiaate...5 3. Testitapaukset...6 3.1 Objektien
Testitapaukset - Xlet Sisällysluettelo 1. Johdanto...3 2. Testattava järjestelmä...4 2.1 Koko järjestelmän yleiskuvaus...4 2.2 Xlet-demosovellus ja sen toimintaperiaate...5 3. Testitapaukset...6 3.1 Objektien
LABORAATIOSELOSTUSTEN OHJE H. Honkanen
 LABORAATIOSELOSTUSTEN OHJE H. Honkanen Tämä ohje täydentää ja täsmentää osaltaan selostuskäytäntöä laboraatioiden osalta. Yleinen ohje työselostuksista löytyy intranetista, ohjeen on laatinut Eero Soininen
LABORAATIOSELOSTUSTEN OHJE H. Honkanen Tämä ohje täydentää ja täsmentää osaltaan selostuskäytäntöä laboraatioiden osalta. Yleinen ohje työselostuksista löytyy intranetista, ohjeen on laatinut Eero Soininen
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 25.2.2009 T-106.1208 Ohjelmoinnin perusteet Y 25.2.2009 1 / 34 Syötteessä useita lukuja samalla rivillä Seuraavassa esimerkissä käyttäjä antaa useita lukuja samalla
Ohjelmoinnin perusteet Y Python T-106.1208 25.2.2009 T-106.1208 Ohjelmoinnin perusteet Y 25.2.2009 1 / 34 Syötteessä useita lukuja samalla rivillä Seuraavassa esimerkissä käyttäjä antaa useita lukuja samalla
Ohjelmoinnin perusteet Y Python
 Ohjelmoinnin perusteet Y Python T-106.1208 15.2.2010 T-106.1208 Ohjelmoinnin perusteet Y 15.2.2010 1 / 46 Merkkijonot Merkkijonojen avulla ohjelmassa voi esittää tekstitietoa, esim. nimiä, osoitteita ja
Ohjelmoinnin perusteet Y Python T-106.1208 15.2.2010 T-106.1208 Ohjelmoinnin perusteet Y 15.2.2010 1 / 46 Merkkijonot Merkkijonojen avulla ohjelmassa voi esittää tekstitietoa, esim. nimiä, osoitteita ja
LUKUJA, DATAA KÄSITTELEVÄT FUNKTIOT JA NIIDEN KÄYTTÖ LOGIIKKAOHJAUKSESSA
 LUKUJA, DATAA KÄSITTELEVÄT FUNKTIOT JA NIIDEN KÄYTTÖ LOGIIKKAOHJAUKSESSA Tavallisimmin lukuja käsittelevien datasanojen tyypiksi kannattaa asettaa kokonaisluku 16 bitin INT, jonka vaihtelualueeksi tulee
LUKUJA, DATAA KÄSITTELEVÄT FUNKTIOT JA NIIDEN KÄYTTÖ LOGIIKKAOHJAUKSESSA Tavallisimmin lukuja käsittelevien datasanojen tyypiksi kannattaa asettaa kokonaisluku 16 bitin INT, jonka vaihtelualueeksi tulee
DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi
 Arttu Polojärvi") DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Suhteellisen liikkeen nopeuden ja kiihtyvyyden yhtälöt. Jäykän kappaleen partikkelin liike. Jäykän
DYNAMIIKKA II, LUENTO 5 (SYKSY 2015) Arttu Polojärvi LUENNON SISÄLTÖ Kertausta edelliseltä luennolta: Suhteellisen liikkeen nopeuden ja kiihtyvyyden yhtälöt. Jäykän kappaleen partikkelin liike. Jäykän
MATEMATIIKKA 5 VIIKKOTUNTIA. PÄIVÄMÄÄRÄ: 8. kesäkuuta 2009
 EB-TUTKINTO 2009 MATEMATIIKKA 5 VIIKKOTUNTIA PÄIVÄMÄÄRÄ: 8. kesäkuuta 2009 KOKEEN KESTO: 4 tuntia (240 minuuttia) SALLITUT APUVÄLINEET: Eurooppa-koulun antama taulukkovihkonen Funktiolaskin, joka ei saa
EB-TUTKINTO 2009 MATEMATIIKKA 5 VIIKKOTUNTIA PÄIVÄMÄÄRÄ: 8. kesäkuuta 2009 KOKEEN KESTO: 4 tuntia (240 minuuttia) SALLITUT APUVÄLINEET: Eurooppa-koulun antama taulukkovihkonen Funktiolaskin, joka ei saa
S-108-2110 OPTIIKKA 1/10 Laboratoriotyö: Polarisaatio POLARISAATIO. Laboratoriotyö
 S-108-2110 OPTIIKKA 1/10 POLARISAATIO Laboratoriotyö S-108-2110 OPTIIKKA 2/10 SISÄLLYSLUETTELO 1 Polarisaatio...3 2 Työn suoritus...6 2.1 Työvälineet...6 2.2 Mittaukset...6 2.2.1 Malus:in laki...6 2.2.2
S-108-2110 OPTIIKKA 1/10 POLARISAATIO Laboratoriotyö S-108-2110 OPTIIKKA 2/10 SISÄLLYSLUETTELO 1 Polarisaatio...3 2 Työn suoritus...6 2.1 Työvälineet...6 2.2 Mittaukset...6 2.2.1 Malus:in laki...6 2.2.2
EDMODO. -oppimisympäristö opettajille ja oppilaille KOONNUT: MIKA KURVINEN KANNUKSEN LUKIO
 EDMODO -oppimisympäristö opettajille ja oppilaille KOONNUT: MIKA KURVINEN KANNUKSEN LUKIO HUOM! Edmodo kehittyy koko ajan, seuraavat ohjeet voivat olla jo päivityksen tarpeessa. 1 Sisällysluettelo Rekisteröityminen
EDMODO -oppimisympäristö opettajille ja oppilaille KOONNUT: MIKA KURVINEN KANNUKSEN LUKIO HUOM! Edmodo kehittyy koko ajan, seuraavat ohjeet voivat olla jo päivityksen tarpeessa. 1 Sisällysluettelo Rekisteröityminen
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 23.2.2016 Susanna Hurme Tervetuloa kurssille! Mitä on statiikka? Mitä on dynamiikka? Miksi niitä opiskellaan? Päivän aihe: Voiman käsite ja partikkelin tasapaino
KJR-C1001 Statiikka ja dynamiikka Luento 23.2.2016 Susanna Hurme Tervetuloa kurssille! Mitä on statiikka? Mitä on dynamiikka? Miksi niitä opiskellaan? Päivän aihe: Voiman käsite ja partikkelin tasapaino
Suorien ja tasojen geometriaa Suorien ja tasojen yhtälöt
 6. Suorien tasojen geometriaa 6.1. Suorien tasojen yhtälöt 55. Osoita, että yhtälöt x = 3 + τ y = 1 3τ esittävät samaa tason suoraa. Yhteinen piste 1,5) suunta i 3j. x = 1 6τ y = 5 + 9τ 56. Määritä suoran
6. Suorien tasojen geometriaa 6.1. Suorien tasojen yhtälöt 55. Osoita, että yhtälöt x = 3 + τ y = 1 3τ esittävät samaa tason suoraa. Yhteinen piste 1,5) suunta i 3j. x = 1 6τ y = 5 + 9τ 56. Määritä suoran
9. Vektorit. 9.1 Skalaarit ja vektorit. 9.2 Vektorit tasossa
 9. Vektorit 9.1 Skalaarit ja vektorit Skalaari on koon tai määrän mitta. Tyypillinen esimerkki skalaarista on massa. Lukumäärä on toinen hyvä esimerkki skalaarista. Vektorilla on taas suuruus ja suunta.
9. Vektorit 9.1 Skalaarit ja vektorit Skalaari on koon tai määrän mitta. Tyypillinen esimerkki skalaarista on massa. Lukumäärä on toinen hyvä esimerkki skalaarista. Vektorilla on taas suuruus ja suunta.
WA-800 Tuoteperhe. Tekniset tiedot. Vaakapäätteet WA-801 WA-802 WA-802r WA-810. Ohjaimet WA-804 WA-805 WA-806 WA-807
 Ahjokatu 4 A, P.O.B. 22 FI-15801 Lahti, Finland Tel. +358 3 829 21 Fax +358 3 829 4100 www.lahtiprecision.com WA-800 Tuoteperhe Tekniset tiedot Vaakapäätteet WA-801 WA-802 WA-802r WA-810 Ohjaimet WA-804
Ahjokatu 4 A, P.O.B. 22 FI-15801 Lahti, Finland Tel. +358 3 829 21 Fax +358 3 829 4100 www.lahtiprecision.com WA-800 Tuoteperhe Tekniset tiedot Vaakapäätteet WA-801 WA-802 WA-802r WA-810 Ohjaimet WA-804
Ohjelmoinnin peruskurssien laaja oppimäärä
 Ohjelmoinnin peruskurssien laaja oppimäärä Luento 10: Paikalliset muuttujat, kirjan tulkki kokonaisuutena (mm. SICP 3.2, 4.1.24.1.6) Riku Saikkonen 22. 11. 2012 Sisältö 1 Ympäristöt: miten paikalliset
Ohjelmoinnin peruskurssien laaja oppimäärä Luento 10: Paikalliset muuttujat, kirjan tulkki kokonaisuutena (mm. SICP 3.2, 4.1.24.1.6) Riku Saikkonen 22. 11. 2012 Sisältö 1 Ympäristöt: miten paikalliset
Digitaalinen eropainekytkin DPS Käyttöohje
 MECAIR Digitaalinen eropainekytkin DPS Käyttöohje HUOMIO: Ennen tuotteen käyttöä sinun on luettava on tämä käyttöopas huolellisesti, jotta saat riittävää tietoa tuotteesta Tekniset tiedot Virransyöttö
MECAIR Digitaalinen eropainekytkin DPS Käyttöohje HUOMIO: Ennen tuotteen käyttöä sinun on luettava on tämä käyttöopas huolellisesti, jotta saat riittävää tietoa tuotteesta Tekniset tiedot Virransyöttö
TALLENNETAAN MUISTITIKULLE JA MUISTIKORTILLE
 TALLENNETAAN MUISTITIKULLE JA MUISTIKORTILLE HERVANNAN KIRJASTON TIETOTORI Insinöörinkatu 38 33720 Tampere 040 800 7805 tietotori.hervanta@tampere.fi TALLENNETAAN MUISTIKULLE JA MUISTIKORTILLE 1 Muistitikun
TALLENNETAAN MUISTITIKULLE JA MUISTIKORTILLE HERVANNAN KIRJASTON TIETOTORI Insinöörinkatu 38 33720 Tampere 040 800 7805 tietotori.hervanta@tampere.fi TALLENNETAAN MUISTIKULLE JA MUISTIKORTILLE 1 Muistitikun
Loppukurssin järjestelyt
 C! Loppukurssin järjestelyt 29.3.2018 Ohjelmassa Yhteenvetoa palautteesta Ohjelmontitehtävän järjestelyt Tietokonetentin järjestelyt Kysyttävää / kerrattavaa 10-kierroksen asioista? Aikatauluista 10. kierroksen
C! Loppukurssin järjestelyt 29.3.2018 Ohjelmassa Yhteenvetoa palautteesta Ohjelmontitehtävän järjestelyt Tietokonetentin järjestelyt Kysyttävää / kerrattavaa 10-kierroksen asioista? Aikatauluista 10. kierroksen
2 Konekieli, aliohjelmat, keskeytykset
 ITK145 Käyttöjärjestelmät, kesä 2005 Tenttitärppejä Tässä on lueteltu suurin piirtein kaikki vuosina 2003-2005 kurssin tenteissä kysytyt kysymykset, ja mukana on myös muutama uusi. Jokaisessa kysymyksessä
ITK145 Käyttöjärjestelmät, kesä 2005 Tenttitärppejä Tässä on lueteltu suurin piirtein kaikki vuosina 2003-2005 kurssin tenteissä kysytyt kysymykset, ja mukana on myös muutama uusi. Jokaisessa kysymyksessä
Loppukurssin järjestelyt C:n edistyneet piirteet
 C! Loppukurssin järjestelyt C:n edistyneet piirteet 30.3.2017 Ohjelmassa Ohjelmontitehtävän järjestelyt Tietokonetentin järjestelyt Esikääntäjä Parametrilistat Funktio-osoittimet Kunniamainintoja Kuura
C! Loppukurssin järjestelyt C:n edistyneet piirteet 30.3.2017 Ohjelmassa Ohjelmontitehtävän järjestelyt Tietokonetentin järjestelyt Esikääntäjä Parametrilistat Funktio-osoittimet Kunniamainintoja Kuura
NC-koneet ja niiden ohjelmointi
 NC-koneet ja niiden ohjelmointi Koordinaattisysteemit Inkrementaalinen Absoluuttinen NC-koneen koordinaatisto Akselien suunnat on määritelty ns. "oikean käden säännön" mukaan (DIN 66217). Koneen edessä
NC-koneet ja niiden ohjelmointi Koordinaattisysteemit Inkrementaalinen Absoluuttinen NC-koneen koordinaatisto Akselien suunnat on määritelty ns. "oikean käden säännön" mukaan (DIN 66217). Koneen edessä
LUMECOM. Jyrsinsovellus. 1. Asennusohje 2. Käyttöohje
 LUMECOM Jyrsinsovellus 1. Asennusohje 2. Käyttöohje 11.4.2018 Asennusohje - ProJyrsin 1. Avaa Google Play Store tabletiltasi - sovellus ei tue toistaiseksi Apple/IOS käyttöjärjestelmiä 2. Kirjoita hakukenttään:
LUMECOM Jyrsinsovellus 1. Asennusohje 2. Käyttöohje 11.4.2018 Asennusohje - ProJyrsin 1. Avaa Google Play Store tabletiltasi - sovellus ei tue toistaiseksi Apple/IOS käyttöjärjestelmiä 2. Kirjoita hakukenttään:
Ohjelmoinnin peruskurssi Y1
 Ohjelmoinnin peruskurssi Y1 CS-A1111 12.9.2018 CS-A1111 Ohjelmoinnin peruskurssi Y1 12.9.2018 1 / 19 Oppimistavoitteet: tämän luennon jälkeen osaat kirjoittaa Python-ohjelman, joka pyytää käyttäjältä lukuja,
Ohjelmoinnin peruskurssi Y1 CS-A1111 12.9.2018 CS-A1111 Ohjelmoinnin peruskurssi Y1 12.9.2018 1 / 19 Oppimistavoitteet: tämän luennon jälkeen osaat kirjoittaa Python-ohjelman, joka pyytää käyttäjältä lukuja,
Tietorakenteet ja algoritmit
 Tietorakenteet ja algoritmit Useampitasoiset ADT:t Käytetään esimerkkiohjelmaa Ratkaisuyritys 1 Ratkaisuyritys 2 Lopullinen ratkaisu Lopullisen ratkaisun toteutusyritys Lopullisen ratkaisun oikea toteutus
Tietorakenteet ja algoritmit Useampitasoiset ADT:t Käytetään esimerkkiohjelmaa Ratkaisuyritys 1 Ratkaisuyritys 2 Lopullinen ratkaisu Lopullisen ratkaisun toteutusyritys Lopullisen ratkaisun oikea toteutus
Ohjelmoinnin peruskurssi Y1
 Ohjelmoinnin peruskurssi Y1 CS-A1111 11.9.2019 CS-A1111 Ohjelmoinnin peruskurssi Y1 11.9.2019 1 / 19 Oppimistavoitteet: tämän luennon jälkeen osaat kirjoittaa Python-ohjelman, joka pyytää käyttäjältä lukuja,
Ohjelmoinnin peruskurssi Y1 CS-A1111 11.9.2019 CS-A1111 Ohjelmoinnin peruskurssi Y1 11.9.2019 1 / 19 Oppimistavoitteet: tämän luennon jälkeen osaat kirjoittaa Python-ohjelman, joka pyytää käyttäjältä lukuja,
1/6 TEKNIIKKA JA LIIKENNE FYSIIKAN LABORATORIO V1.31 9.2011
 1/6 333. SÄDEOPTIIKKA JA FOTOMETRIA A. INSSIN POTTOVÄIN JA TAITTOKYVYN MÄÄRITTÄMINEN 1. Työn tavoite. Teoriaa 3. Työn suoritus Työssä perehdytään valon kulkuun väliaineissa ja niiden rajapinnoissa sädeoptiikan
1/6 333. SÄDEOPTIIKKA JA FOTOMETRIA A. INSSIN POTTOVÄIN JA TAITTOKYVYN MÄÄRITTÄMINEN 1. Työn tavoite. Teoriaa 3. Työn suoritus Työssä perehdytään valon kulkuun väliaineissa ja niiden rajapinnoissa sädeoptiikan
Megatunen käyttö. Asenna megatune koneelle MsExtra-sivuilta: http://www.msextra.com/manuals/ms_extra_manual_index.htm
 Megatunen käyttö Asenna megatune koneelle MsExtra-sivuilta: http://www.msextra.com/manuals/ms_extra_manual_index.htm Avaa Megatune ja File valikosta configurator. Sieltä asennetaan perusasetukset. Koodin
Megatunen käyttö Asenna megatune koneelle MsExtra-sivuilta: http://www.msextra.com/manuals/ms_extra_manual_index.htm Avaa Megatune ja File valikosta configurator. Sieltä asennetaan perusasetukset. Koodin
Harjoitus 3: Flash-komponenttiarkkitehtuuri (18.3.2016)
") Harjoitus 3: Flash-komponenttiarkkitehtuuri (18.3.2016) Tietokoneavusteinen opetus -kurssilla opetetaan Adobe Flash CS6:n käyttämistä neljänä kertana: 11.3.2016, 15.3.2016, 18.3.2016 ja 1.4.2016. Harjoituskerroilla
Harjoitus 3: Flash-komponenttiarkkitehtuuri (18.3.2016) Tietokoneavusteinen opetus -kurssilla opetetaan Adobe Flash CS6:n käyttämistä neljänä kertana: 11.3.2016, 15.3.2016, 18.3.2016 ja 1.4.2016. Harjoituskerroilla
GSM OHJAIN FF KÄYTTÖOHJE PLC MAX S03
 GSM OHJAIN FF KÄYTTÖOHJE PLC MAX S03 TRIFITEK FINLAND OY 2012 V1.0 1. OHJELMISTO; ASENTAMINEN, KÄYTTÖ 1.1 Ohjelmiston asentaminen tietokoneeseen, Ajurin asentaminen Laitteen mukana toimitetaan muistitikulla
GSM OHJAIN FF KÄYTTÖOHJE PLC MAX S03 TRIFITEK FINLAND OY 2012 V1.0 1. OHJELMISTO; ASENTAMINEN, KÄYTTÖ 1.1 Ohjelmiston asentaminen tietokoneeseen, Ajurin asentaminen Laitteen mukana toimitetaan muistitikulla
Tutoriaaliläsnäoloista
 Tutoriaaliläsnäoloista Tutoriaaliläsnäolokierroksella voi nyt täyttää anomuksen läsnäolon merkitsemisestä Esim. tagi ei toiminut, korvavaltimon leikkaus, yms. Hyväksyn näitä omaa harkintaa käyttäen Tarkoitus
Tutoriaaliläsnäoloista Tutoriaaliläsnäolokierroksella voi nyt täyttää anomuksen läsnäolon merkitsemisestä Esim. tagi ei toiminut, korvavaltimon leikkaus, yms. Hyväksyn näitä omaa harkintaa käyttäen Tarkoitus
Modulaatio-ohjauksen toimimoottori AME 85QM
 Modulaatio-ohjauksen toimimoottori AME 85QM Kuvaus AME 85QM -toimimoottoria käytetään AB-QM DN 200- ja DN 250 -automaattiisissa virtauksenrajoitin ja säätöventtiileissä. Ominaisuudet: asennon ilmaisu automaattinen
Modulaatio-ohjauksen toimimoottori AME 85QM Kuvaus AME 85QM -toimimoottoria käytetään AB-QM DN 200- ja DN 250 -automaattiisissa virtauksenrajoitin ja säätöventtiileissä. Ominaisuudet: asennon ilmaisu automaattinen
Pakettisynkronointitestauksen automaatio
 Pakettisynkronointitestauksen automaatio Risto Hietala valvoja: Prof. Riku Jäntti ohjaaja: DI Jonas Lundqvist ESITYKSEN RAKENNE Tietoverkkojen synkronointi Pakettikytkentäisten verkkojen synkronointi Ohjelmistotestaus
Pakettisynkronointitestauksen automaatio Risto Hietala valvoja: Prof. Riku Jäntti ohjaaja: DI Jonas Lundqvist ESITYKSEN RAKENNE Tietoverkkojen synkronointi Pakettikytkentäisten verkkojen synkronointi Ohjelmistotestaus
Algoritmit 2. Demot Timo Männikkö
 Algoritmit 2 Demot 2 3.-4.4.2019 Timo Männikkö Tehtävä 1 Avoin osoitteenmuodostus: Hajautustaulukko t (koko m) Erikoisarvot VAPAA ja POISTETTU Hajautusfunktio h(k,i) Operaatiot: lisaa etsi poista Algoritmit
Algoritmit 2 Demot 2 3.-4.4.2019 Timo Männikkö Tehtävä 1 Avoin osoitteenmuodostus: Hajautustaulukko t (koko m) Erikoisarvot VAPAA ja POISTETTU Hajautusfunktio h(k,i) Operaatiot: lisaa etsi poista Algoritmit
6.3. AVR_rauta. EEPROM-muisti 09.12.2007 pva
 6.3. AVR_rauta. EEPROM-muisti 09.12.2007 pva Experience is what causes people to make new mistakes instead of old ones... - Unknown Sisältö Yleistä EEPROM-rekisterit Protoilu-ohje EEPROMmista ja Fuse-biteistä
6.3. AVR_rauta. EEPROM-muisti 09.12.2007 pva Experience is what causes people to make new mistakes instead of old ones... - Unknown Sisältö Yleistä EEPROM-rekisterit Protoilu-ohje EEPROMmista ja Fuse-biteistä
FYSA210/2 PYÖRIVÄ KOORDINAATISTO
 FYSA210/2 PYÖRIVÄ KOORDINAATISTO Johdanto Inertiaalikoordinaatisto on koordinaatisto, jossa Newtonin mekaniikan lait pätevät. Tällaista koordinaatistoa ei reaalimaailmassa kuitenkaan ole. Epäinertiaalikoordinaatisto
FYSA210/2 PYÖRIVÄ KOORDINAATISTO Johdanto Inertiaalikoordinaatisto on koordinaatisto, jossa Newtonin mekaniikan lait pätevät. Tällaista koordinaatistoa ei reaalimaailmassa kuitenkaan ole. Epäinertiaalikoordinaatisto
Laboratoriotyö. 1. Laitteisto. 1.1 Kamera
 Laboratoriotyö 1. Laitteisto 1.1 Kamera Järjestelmän kamerassa (Hitachi, VK-C77E) on CCD -kenno ja mahdollisuus kuvan asynkroniseen päivitykseen. Kamerassa on sarjaliitäntä, jonka kautta voidaan ohjata
Laboratoriotyö 1. Laitteisto 1.1 Kamera Järjestelmän kamerassa (Hitachi, VK-C77E) on CCD -kenno ja mahdollisuus kuvan asynkroniseen päivitykseen. Kamerassa on sarjaliitäntä, jonka kautta voidaan ohjata