SUOMEN GEOIDIMALLIT JA NIIDEN KÄYTTÄMINEN KORKEUDEN MUUNNOKSISSA
|
|
|
- Maria Koskinen
- 10 vuotta sitten
- Katselukertoja:
Transkriptio
1 009 GEODEETTINEN LAITOS TIEDOTE 9 Mirjam Bilker-Koivula Matti Ollikainen SUOMEN GEOIDIMALLIT JA NIIDEN KÄYTTÄMINEN KORKEUDEN MUUNNOKSISSA

2 ISBN-13: ISSN: pdf-isbn: ii

3 Sisällysluettelo Yhteenveto... v Abstract... vi 1. Johdanto Peruskäsitteitä Korkeus ellipsoidista..... Vaaittu korkeus Geoidikorkeus Suomen kartastotöissä käytettävät koordinaatistot Suomessa käytettävät korkeusjärjestelmät Aiemmat korkeusjärjestelmät N60-järjestelmä N000-järjestelmä Paikalliset korkeusjärjestelmät Korkeusjärjestelmien väliset erot Geoidimallit Globaalit geoidimallit OSU91A EGM GGM Eurooppalainen geoidimalli EGG Pohjoismaiset geoidimallit NKG NKG NKG Suomen alueen vanhat geoidimallit Astrogeodeettinen Bomford 1970 geoidimalli FIN FIN000-geoidimalli Pisteet Polynomipinnan ratkaiseminen FIN005N00-geoidimalli Havaintopisteet Laskelmat Geoidimallien väliset erot Suomen geoidimallien käyttö Pisteen korkeuden muunnos Paikallisen muunnospinnan määrittäminen Muunnospinta maantieteellisissä EUREF-FIN-koordinaateissa Muunnospinta tasokoordinaateissa Mistä geoidimalleja saa... 5 Kirjallisuusviitteet... 8 Liite A: Erityyppiset korkeudet A.1. Korkeus ellipsoidista A.. Ortometrinen korkeus A.3. Normaalikorkeus... 3 A.4. Geoidikorkeus ja korkeusanomalia... 3 Liite B: Laskuesimerkki: Bi-lineaarinen interpolointi FIN005N00-geoidimallin hilassa.. 34 Liite C: Laskuesimerkki: Paikallisen muunnospinnan johtaminen FIN005N00-mallin avulla maantieteellisessä EUREF-FIN-koordinaateissa C.1. Lähtökoordinaatit C.. Paikallisen muunnospinnan johtaminen C.3. Muunnospinnan tarkkuus C.4. Muunnospinnan käyttö: bi-lineaarinen interpolointi iii

4 Liite D: Laskuesimerkki: Paikallisen muunnospinnan johtaminen FIN005N00-mallin avulla ETRS-TM35FIN -tasokoordinaateissa D.1. Lähtökoordinaatit D.. Paikallisen muunnospinnan johtaminen D.3. Muunnospinnan tarkkuus D.4. Muunnospinnan käyttö: bi-lineaarinen interpolointi iv

5 Yhteenveto Geoidimallien käyttö on viime vuosina lisääntynyt huomattavasti. Kansallisen geoidimallin, tai oikeammin muunnospinnan avulla voidaan GPS:llä mitatut ellipsoidiset korkeudet muuntaa vaaituiksi korkeuksiksi kansallisessa korkeusjärjestelmässä. Tiedotteessa esitellään Suomen alueen geoidimallit ja niiden käyttö. Suomen alueella merkittävimmät globaaliset geoidimallit ovat OSU91A, EGM96 ja GGM0. Alueelliset geoidimallit ovat eurooppalainen EGG97-malli ja Pohjoismaisen geodeettisen komission geoidityöryhmän laskemat mallit NKG89, NKG96 ja NKG004. Suomen alueen vanhat geoidimallit ovat astrogeodeettinen Bomford 1970 ja painovoimahavaintoihin perustuva FIN95-malli. Nykyisin Suomessa käytössä olevat geoidimallit ovat FIN000 ja FIN005N00. FIN000- malli on muunnospinta jolla EUREF-FIN-koordinaatistossa GPS:llä mitatut ellipsoidiset korkeudet voidaan muuntaa N60-korkeusjärjestelmän mukaisiksi vaaituskorkeuksiksi. FIN000- malli on laskettu sovittamalla korjauspinta NKG96-geoidimalliin 156 GPS/vaaituspisteiden avulla. Mallin tarkkuus on 3 cm ja suurimmat muunnosvirheet voivat olla 9 cm. FIN005N00 on uusin valtakunnallinen malli. Tällä muunnospinnalla EUREF-FINkoordinaatistossa GPS:llä mitatut ellipsoidiset korkeudet voidaan muuntaa N000- korkeusjärjestelmän mukaisiksi vaaituskorkeuksiksi. Mallin pohjana on NKG004-geoidimalli, johon on laskettu korjauspinta 50 EUVN-DA (European Vertical Reference Network Densification Act) GPS/vaaituspisteiden avulla. Mallin tarkkuus on cm ja suurimmat muunnosvirheet voivat olla 6 cm. FIN000- ja FIN005N00-mallit ovat saatavissa hila-muotoisina EUREF-FIN-koordinaateissa. Hilasta voidaan laskea halutulle pisteelle geoidikorkeus bi-lineaarisella interpolointimenetelmällä. Alueellisilla GPS/vaaituspisteillä voidaan määrittää kansallisesta mallista paikallinen muunnospinta maantieteellisissä EUREF-FIN koordinaateissa tai haluttaessa tasokoordinaateissa. v

6 Abstract Over the years the use of geoid models has increased considerably. Using a national geoid model, or better said a transformation surface, ellipsoidal heights, as measured by GPS, can be transformed into heights in the national height system, as measured by levelling. This publication gives an overview of the geoid models available for Finland and their use. Global geoid models of importance for Finland are OSU91, EGM96, and GGM0. Important regional models are the European model EGG97 and the Nordic models NKG98, NKG96, and NKG004 calculated by the working group on geoid determination of the Nordic Geodetic Commission. Old Finnish models are the astro-geodetic geoid model Bomford 1970 and the FIN95 model, which is based on gravity observations. At present, two geoid models are used in Finland: FIN000 and FIN005N00. The FIN000 model is a transformation surface with which ellipsoidal coordinates, measured with GPS in the EUREF-FIN reference frame, can be transformed into leveled coordinates in the N60 height system. The FIN00 model was calculated by fitting a correction surface to the NKG96 model using data of 156 GPS/levelling points. The accuracy of the model is 3 cm and the biggest transformation errors can be 9 cm. The newest model for Finland is FIN005N00. With this transformation surface ellipsoidal heights, measured with GPS in the EUREF-FIN reference frame, can be transformed into leveled heihts in the N000 height system. The model is based on the NKG004 geoid model to which a correction surface was fitted using the data of the 50 EUVN-DA (European Vertical Reference Network Densification Act) GPS/levelling points. The accuracy of the model is cm and largest transformation errors can be 6 cm. The FIN000 and FIN005N00 models are available in grid-formats in EUREF-FIN coordinates. Geoid heights for points can be calculated from the grids using bi-linear interpolation. When local GPS/levelling data is available a local transformation surface can be determined from a national model. This can be done either in EUREF-FIN coordinates or optionally in projected coordinates. vi

7 1. Johdanto Geoidimallien käyttö on viime vuosikymmenien aikana lisääntynyt huomattavasti ja samalla myös niiden tarkkuusvaatimukset ovat kasvaneet. Syynä on GPS-satelliittipaikannus, joka yhä enemmän korvaa perinteisiä maanmittausmenetelmiä kuten vaaitusta. Vaaituksesta saadaan korkeuksia keskimerenpinnan suhteen kansallisessa korkeusjärjestelmässä, mutta GPS mittaa korkeuksia ellipsoidipinnan suhteen. Näitä kahta eri korkeutta yhdistää geoidimalli, joka kuvaa geoidin ja ellipsoidin välistä etäisyyttä. Geoidimalleja voidaan laskea globaalisina, alueellisina ja kansallisina. Gravimetriset geoidimallit lasketaan painovoimamittauksista, jotka voivat olla esimerkiksi satelliittihavaintoja, ilmagravimetriamittauksia, laivamittauksia ja maanpäällisiä havaintoja. Kun gravimetrinen geoidimalli sovitetaan GPS-vaaitusdatan avulla kansalliseen korkeusjärjestelmään, syntyy kansallinen malli, jota voidaan käyttää muunnettaessa ellipsoidikorkeuksia vaaituskorkeuksiksi ja toisinpäin. Suomessa on tähän tarkoitukseen käytössä tällä hetkellä kaksi geoidimallia: FIN000 ja FIN005N00. Tässä tiedotteessa esitellään Suomen nykyiset mallit, niiden taustat, miten mallit on sovitettu Suomen korkeusjärjestelmiin, mikä on mallien tarkkuus ja miten niitä voidaan käyttää GPSvaaituksessa. Gravimetrisien geoidimallien laskentamenetelmiä ei käsitellä tässä tiedotteessa. Tiedotteen alussa kappaleessa käsitellään geoidimalleihin liittyvät peruskäsitteet, kuten korkeudet sekä Suomessa käytössä olevat koordinaatistot ja korkeusjärjestelmät. Kappaleessa 3 kuvataan lyhyesti Suomeen liittyviä globaaleita, alueellisia ja vanhoja Suomen alueen geoidimalleja. Kappaleissa 4 ja 5 käsitellään tarkemmin Suomen nykyisiä geoidimalleja, FIN000 ja FIN005N00, sekä kappaleessa 6 näiden mallien välisiä eroja. Kappaleessa 7 annetaan ohjeet geoidimallien käyttämisestä ja lopuksi kappaleessa 8 kerrotaan mistä ja missä muodossa malleja saa. Liitteistä löytyy tarkempia tietoja eri korkeuksista (Liite A) ja malleihin liittyviä laskuesimerkkejä (Liitteet B, C ja D). 1

8 . Peruskäsitteitä Geoidikorkeus yhdistää geoidimalleihin liittyvät korkeuskäsitteet ellipsoidikorkeus ja vaaituskorkeus. Näiden lisäksi on tärkeä tietää mistä koordinaatti- ja korkeusjärjestelmästä on kyse. Ellipsoidikorkeus, vaaituskorkeus ja geoidikorkeus on lyhyesti selitetty kappaleessa.1.,.., ja.3., ja tarkemmin liitteessä A. Kappaleessa.4. annetaan yleiskuva Suomessa käytössä olevista koordinaattijärjestelmistä ja korkeusjärjestelmät esitellään lyhyesti kappaleessa Korkeus ellipsoidista GPS-mittausten laskennan tuloksena saadaan pisteen kolmiulotteiset koordinaatit (X, Y, Z), jotka voidaan muuntaa maantieteellisiksi koordinaateiksi (ϕ, λ) ja ellipsoidikorkeudeksi (h) (Kuva -1), kun tunnetaan järjestelmään liittyvän ellipsoidin ominaisuudet. Ellipsoidikorkeus antaa mittauspisteen etäisyyden ellipsoidipinnasta. Se on geometrinen suure, joka ei kerro vielä mihin suuntaan vesi virtaa. Siihen tarvitaan korkeus, joka on määritelty perinteisellä vaaitusmenetelmällä... Vaaittu korkeus Tarkkavaaituksessa mitataan pisteiden välisiä geopotentiaalieroja jotka muutetaan metrisiksi korkeuseroiksi. Vaaituslatat asetetaan vesivaa an avulla luotiviivan suuntaan, ts. kohtisuoraan geoidipintaan nähden ja vaaituskoneen optinen akseli geoidipinnan suunnaiseksi, jolloin tähtäyssäteet kulkevat geoidin tangentin suuntaisesti. Korkeusjärjestelmän nollatasona käytetään usein keskimerenpintaa, jonka oletetaan vastaavan geoidipintaa. Näin pisteiden vaaitut korkeudet H saadaan automaattisesti geoidipintaan nähden (Kuva -). Riippuen siitä miten paikallinen painovoima otetaan huomioon tarkkavaaituslaskuissa, syntyy joko ortometrinen tai normaalikorkeusjärjestelmä. Suomen N60-korkeusjärjestelmä on ortometrinen ja uudessa N000-korkeusjärjestelmässä korkeudet ovat normaalikorkeuksia. Ortometrisen ja normaalikorkeuden ero on kaikkialla Suomessa alle 8 cm (katso liite A).3. Geoidikorkeus Klassisen määritelmän mukaan geoidi on se muoto johon vapaa valtameren pinta asettuu lepotilassa. Geoidi on pinta joka yhdistää valtameret ja jatkuu myös mantereiden ali. Geoidin tarkkaa muotoa ja paikkaa kolmiulotteisessa avaruudessa on vaikea kuvata matemaattisesti koska geoidi on fysikaalinen maan massojen ja tiheysvaihteluiden määräämä pinta. Yleensä geoidi kuvataan korkeuksina vertausellipsoidiin nähden. Silloin puhutaan geoidimallista. Geoidimallissa annetaan siis geoidin korkeus ellipsoidista eli geoidikorkeus. Geoidikorkeuden (N), ellipsoidikorkeuden (h), ja vaaitun korkeuden (H) välinen yhteys on (kuva -): h = H + N. (-1) Edellä mainittua geoidimallia käytetään ortometristen korkeuksien yhteydessä. Normaali- Kuva -1. Kolmiulotteiset koodinaatit (X,Y,Z) ja maantieteelliset koodinaatit (φ,λ,h). Kuva -. Eri korkeuksia: korkeus ellipsoidista, h, vaaittu korkeus, H, ja geoidikorkeus, N.
, jotka voidaan muuntaa maantieteellisiksi koordinaateiksi (ϕ, λ) ja")
9 korkeuksien yhteydessä tulisi käyttää hieman eri tavalla määritettyä kvasigeoidimallia (katso liite A). Suomessa erot ovat kuitenkin hyvin pieniä joten tässä tiedotteessa käytetään yksinkertaisuuden vuoksi ainoastaan termiä geoidimalli..4. Suomen kartastotöissä käytettävät koordinaatistot Suomessa on käytössä kaksi valtakunnallista koordinaatistoa. Ensimmäinen on ensimmäisen luokan kolmioverkkoon perustuva kkj-järjestelmä. Toinen on EUREF-FIN joka perustuu GPSmittauksiin. Kartastokoordinaattijärjestelmä, kkj, otettiin käyttöön v Se perustuu Geodeettisen laitoksen ED50-järjestelmään, jonka Hayford-ellipsoidille lasketut koordinaatit on Gauss-Krügerprojektiolla projisoitu xy-tasokoordinaateiksi. kkj-koordinaatit esitetään joko kolmen asteen kaistoissa, joiden keskimeridiaanit ovat 18, 1, 4, 7, 30 ja 33 tai yhdessä kaistassa (Yhtenäiskoordinaatisto, ykj), jonka keskimeridiaani on 7. Euroopan mantereelle on luotu koordinaattijärjestelmä ETRS89 (European Terrestrial Reference System 1989) ja sen realisaatio ETRF89 (European Terrestrial Reference Frame 1989). ETRS89-järjestelmässä käytetään GRS80-ellipsoidia (Geodetic Reference System 1980). Geodeettinen laitoksen luomaa Suomen ETRS89-järjestelmän kansallista realisaatiota kutsutaan nimellä EUREF-FIN. EUREF-FIN-koordinaatiston kanssa suositellaan käytettäväksi ETRS-TM35FIN -karttaprojektiota ja tasokoordinaattijärjestelmää. Rinnakkaisena projektiona on mahdollista käyttää paikallisesti Gauss-Krüger -projektiota, ETRS-GK. Yksityiskohdat löytyvät Julkisen hallinnon suosituksista (JHS 153 ja JHS 154, 00)..5. Suomessa käytettävät korkeusjärjestelmät Suomen valtakunnalliset korkeusjärjestelmät perustuvat tarkkavaaitusverkon tasoitukseen. Tarkkavaaitusverkko on vaaittu kolme kertaa. Uusin kansallinen järjestelmä N000 perustuu Kolmannen tarkkavaaitukseen tuloksiin. Sen vaaituslinjastoon sisältyvät liitokset sekä mareografeille että Ruotsin, Norjan ja Venäjän vaaitusverkkoon. Tämän luvun tiedot perustuvat prof. E. KÄÄRIÄISEN (1975) kirjoittamaan artikkeliin, Kansallisen korkeustyöryhmän lausuntoon (ANON, 004) ja Geodeettisen laitoksen julkaisuun 139 (LEHMUSKOSKI et al., 008) Aiemmat korkeusjärjestelmät Ensimmäinen valtakunnallinen korkeusjärjestelmä, NN-järjestelmä, syntyi Suomen ensimmäisen tarkkavaaituksen yhteydessä, jonka suoritti Tie- ja Vesirakennusten Ylihallitus vuosina (BLOMQVIST ja RENQVIST, 1910). Vaaitusverkko ulottui vain Oulu-Kajaani -linjalle saakka. Mittaustuloksiin liitettiin normaalipainovoiman mukainen ortometrinen korjaus, mutta ei maannousun vaikutusta. Lähtökorkeudeksi valittiin Helsingissä, Katajanokan sillassa sijainneen vesiasteikon nollapiste, joka oli m Tähtitorninmäelle rakennetun peruskiintopisteen alapuolella. Geodeettinen laitos aloitti vuonna 1935 Suomen Toisen tarkkavaaituksen. Vaaitustyön kuluessa syntyi väliaikainen järjestelmä, N43. Vaaittuihin korkeuseroihin liitettiin ortometrinen korjaus, mutta maankohoamisen vaikutusta ei otettu huomioon. N43-järjestelmän lähtötaso on sama kuin NN-järjestelmässäkin, m peruskiintopisteen alapuolella. Vaikka lähtötaso on sama NN- ja N43-järjestelmissä, korkeusluvut eroavat kaikkialla, missä maannousun nopeus poikkeaa Helsingin maannousun nopeudesta. Sekä NN- että N43-järjestelmän mukaisia korkeuksia on edelleen käytössä..5.. N60-järjestelmä Täsmällinen maannousun ja painovoiman vaikutuksen huomioon ottava korkeusjärjestelmä voitiin luoda vasta Toisen tarkkavaaituksen verkon tultua pääosiltaan mitatuksi. Maannousu määritettiin Ensimmäisen ja Toisen tarkkavaaituksen korkeuseroista noin tuhannelle yhteiselle kiintopisteelle. Saadut maannousuluvut kiinnitettiin Suomen kahdentoista silloin käytössä olleen mareografin havainnoista saatuihin maannousuarvoihin. Korkeusjärjestelmän lähtötasoksi valittiin Helsingin mareografin vuosien havaintojen perusteella määritetty teoreettinen 3

10 keskivedenpinta vuoden 1960 alussa. Korkeusjärjestelmän nimeksi tuli N60. N60-järjestelmän korkeudet ovat ortometrisia korkeuksia. Koska Ensimmäisen tarkkavaaituksen verkko ei ylittänyt Lappiin, otettiin Lapissa käyttöön ensin väliaikainen LN-korkeusjärjestelmä. Vasta vuosina suoritetun Lapin uusintavaaituksen jälkeen voitiin määrittää maannousu myös Lapissa ja N60-järjestelmä tuli koko maan kattavaksi N000-järjestelmä N000-korkeusjärjestelmä esitellään julkisen hallinnon suosituksessa nro 163 (JHS 163, 007). N000-järjestelmä perustuu Kolmanteen valtakunnalliseen tarkkavaaitukseen, joka suoritettiin vuonna (LEHMUSKOSKI et al., 008). N000:n korkeuserot vastaavat maannousun suhteen tilannetta vuoden 000 alussa. Maannousun vaikutus korkeuseroihin korjattiin yhteispohjoismaisella maannousumallilla. N000-korkeusjärjestelmän korkeudet ovat normaalikorkeuksia ja lähtötasoksi valittiin eurooppalaisen korkeusjärjestelmän lähtötaso NAP (Normaal Amsterdams Peil). Järjestelmä on yhteensopiva eurooppalaisen EVRS000-järjestelmän määritelmän kanssa. Kansallisen verkon lähtötaso johdettiin Itämeren ympärysvaltioiden vaaitusverkkojen yhteistasoituksella NAP:sta. N000:n pääkiintopiste PP000 sijaitsee Kirkkonummella Geodeettisen laitoksen Metsähovin observatoriossa Paikalliset korkeusjärjestelmät Useat kunnat ja kaupungit ovat perustaneet omia korkeusjärjestelmiään, jotka eivät ole välttämättä liitetty viralliseen valtakunnalliseen korkeusjärjestelmään. Kunnan korkeusjärjestelmä voi perustua esimerkiksi N43-järjestelmään tai olla valtakunnallisista järjestelmistä riippumaton. Tämä voi aiheuttaa ongelmia, mikäli järjestelmäeroja ei oteta huomioon Korkeusjärjestelmien väliset erot Valtakunnallisten korkeusjärjestelmien (NN, N43, ja N60) siirtokorjaukset järjestelmästä toiseen on julkaistu Geodeettisen laitoksen julkaisussa (KÄÄRIÄINEN, 1963). Maanmittauslaitos on laskenut kolmioittaisen muunnoksen N60- ja N000-korkeusjärjestelmien välisille siirtokorjauksille. Suomen yli on muodostunut kolmioverkko, jossa jokaiselle solmulle on annettu korkeudet kummassakin korkeusjärjestelmässä. Niiden avulla siirtokorjaukset ovat laskettavissa. Muunnoksen parametrit ovat ladattavissa Geodeettisen laitoksen muunnospalvelusta [ (KOVANEN, 008). Useimmat kunnat, joilla on omat järjestelmänsä, ovat liittäneet sen johonkin valtakunnalliseen korkeusjärjestelmään. Paikallisen järjestelmän suppeasta alueesta johtuen siirtyminen valtakunnalliseen järjestelmään voidaan useimmiten hoitaa lisäämällä vakiokorjaus paikallisen järjestelmän korkeuksiin. 4
.")
11 3. Geoidimallit Klassillisen määritelmän mukaan geoidi on se maan painovoiman potentiaalin tasa-arvopinta, joka yhtyy valtamerten keskivedenpintaan. Määritelmä ei pidä tarkalleen paikkaansa, sillä useat geofysikaaliset ilmiöt aiheuttavat valtamerten keskivedenpinnan korkeuteen poikkeamia, joita kutsumme merenpinnan topografiaksi (ks. esim. POUTANEN, 000). Geoidipinnan määrittämiseen käytetään monenlaisia havaintoja. Aiemmin käytettiin yleisesti astro-geodeettista menetelmää, missä havaintopaikkojen astronomisten ja geodeettisten koordinaattien eroista laskettiin kolmiopisteiden luotiviivanpoikkeamat, joita käytettiin geoidinkorkeuksien laskemiseen. Koska astro-geodeettisen menetelmän avulla voidaan määrittää vain pisteiden välisiä geoidinkorkeuseroja ja havaintotyö on lisäksi erittäin työlästä, on astrogeodeettinen menetelmä jäänyt geodesian historian hämärään. Nykyiset geoidinmääritysmenetelmät perustuvat Maan painovoiman potentiaalin määrittämiseen. Maan painovoimakentän kartoitusta tehdään Maata kiertävien satelliittien avulla, minkä lisäksi satelliiteista saatavaa painovoima-aineistoa tarkennetaan Maan pinnalla tehtävillä painovoimahavainnoilla. Tietomme Maan painovoimakentästä paranevat jatkuvasti, mikä puolestaan parantaa geoidin määrityksen tarkkuutta. Satelliiteista saatavan painovoima-aineiston avulla saadaan määritetyksi Maan potentiaalimalli, josta edelleen voidaan laskea geoidimalli. Globaalia geoidimallia voidaan parantaa jollakin alueella Maan pinnalla tehtyjen painovoimahavaintojen avulla. Tällöin puhumme alueellisesta geoidimallista. Seuraavissa kappaleissa kerrotaan globaaleista, eurooppalaisista ja pohjoismaisista geoidimalleista. Sen lisäksi käsitellään käytöstä poistuneita Suomen alueen geoidimalleja. Nykyisin käytössä olevat Suomen alueen geoidimallit käsitellään omissa luvuissaan (luvut 4 ja 5) Globaalit geoidimallit Satelliittien myötä Maan painovoimakentän mittauksissa alkoi uusi aikakausi. Satelliittien avulla voitiin saada tietoa painovoimakentän globaalista vaihtelusta ja globaalien geoidimallien määrittäminen tuli mahdolliseksi. Myös paikalliset geoidimallit saatettiin kiinnittää globaaliin referenssijärjestelmään. Viime vuosisadan lopulla määritettiin lukuisia globaaleja geoidimallien ratkaisuja. Mainitsemme tässä näistä vain muutaman, joilla on ollut merkitystä oman alueemme geoidimallien määrittämisessä OSU91A OSU91A-malli perustuu GEM-T satelliitin painovoimamalliin, johon lisättiin yhden vuoden pituinen jakso GEOSAT-satelliitin altimetrihavaintoja sekä maanpinnalla tehtyjä painovoimahavaintoja. Malli sisältää 360 asteen harmoniset pallofunktiot, joiden esittämiseen tarvitaan kerrointa (RAPP et al., 1991). Suomessa tarkkuus on noin 70 cm ja noin 5 cm tason sovituksen jälkeen (Kuva 3- ja BILKER et al., 003) EGM96 EGM96-mallin kehittämiseen osallistuivat U.S. Defense Mapping Agency (DMA), nykyisin National Geospatial-Intelligence Agency (NGA), NASAn Goddard Space Flight Center (GSFC) sekä Ohion valtion yliopisto (OSU) (LEMOINE et al., 1998). Malli esitetään 360 asteen harmonisten pallofunktioiden avulla. Tavoitteena oli malli, jonka avulla saadaan lasketuksi absoluuttiset geoidin korkeudet kaikkialla maailmassa paremmin kuin 1 m:n tarkkuudella. Malli julkaistiin vuonna 1996 (RAPP, 1996). EGM96-mallin mukaiset geoidin korkeudet esitetään kuvassa 3-1. Suomessa tarkkuus on noin 15 cm (Kuva 3- ja BILKER et al., 003). 5

12 Kuva 3-1. Globaali geoidimalli EGM-96 (LEMOINE et al., 1998) GGM0 GGM0-mallit on kehitetty Texasin yliopiston Center for Space Researchissa (UT-CSR). Mallien tekemiseen käytettiin GRACE-painovoimasatelliittien dataa 363 päivän ajalta. GGM0S-malli on luotu yksinomaan GRACE-datasta ja se esitetään 160 asteen palloharmonisten funktioiden kertoimien avulla. GGM0C-mallissa GGM0S-malli yhdistettiin Maan pinnalla tehtyihin painovoimahavaintoihin. Malli sisältää 00 asteen palloharmonisten funktioiden kertoimet (TAPLEY et al., 005). Koska malleista puuttuvat korkeamman asteen kertoimet, on niiden kokonaistarkkuus Suomessa huonompi kuin esimerkiksi EGM96-mallin tarkkuus (Kuva 3- ja BILKER, 005). Jos ainoastaan matalamman asteen kertoimet otetaan huomioon, GGM0-mallit toimivat Suomessa paremmin kuin EGM96-malli (BILKER, 005). RMS (m) Ilman pinnan sovitusta kallistetun tason sovituksen jälkeen OSU91A EGM96 GGM0S GGM0C EGG97 NKG96 NKG04 Malli Kuva 3-. Globaalien ja alueellisien geoidimallien tarkkuus Pohjoismaissa. Arvot on saatu vertaamalla Suomen ja Ruotsin GPS/vaaitusdatasta laskettuja geoidikorkeuksia malleihin. Mustat palkit kuvaavat tarkkuutta tason sovituksen jälkeen (BILKER et al., 003, ja BILKER, 005). 6
.")
13 3.. Eurooppalainen geoidimalli EGG97 EGG97 on Euroopan alueelle laskettu geoidimalli. Malli laskettiin Hannoverin yliopistossa IAG:n geoidi- ja painovoimakomission aloitteesta (DENKER et al., 1996). Globaalimalli EGM96 yhdistettiin maalla mitattuun painovoimadataan, jonka resoluutio oli parempi kuin 10 km, sekä merellä laivadataan ja altimetria-dataan. Malli on annettu hilana jonka resoluutio on 1.0 x 1.5 kaariminuuttia. EGG97:n tarkkuus Suomessa on 11 cm ja 7 cm kallistuksen poistamisen jälkeen (Kuva 3- ja BILKER et al., 003) Pohjoismaiset geoidimallit Pohjoismaisen geodeettisen komission geoidityöryhmä on laskenut useita geoidimalleja, jotka kattavat koko Pohjoismaiden alueen ja päämääränä on ollut luoda yhteinen painovoimatietokanta koko alueelle. Tietokannan päivitys ja tarkastus on jatkuva prosessi. Kun iso päivitys tapahtuu tai uusi huomattavasti parempi globaali geoidimalli on ilmestynyt, lasketaan uusi pohjoismainen NKG-geoidimalli. Ennen kuin mallia voidaan käyttää kansallisissa GPS-vaaituksissa, on tehtävä sovitus maan omaan korkeusjärjestelmään NKG89 NKG89 geoidimalli laskettiin Pohjoismaiden alueelle käyttämällä pohjoismaista painovoimadataa ja OSU89B globaalia painovoimamallia (FORSBERG, 1989 ja 1990). Malli on laskettu 5 km x 5 km hilalla UTM-karttaprojektiossa. Mallin testaamiseen käytetyllä 000 km pitkällä GPSvaaituslinjalla virheiden keskihajonta on 10 cm ja paikallisilla GPS-vaaitusverkoilla vain muutama cm. (FORSBERG, 1990) NKG96 Vuonna 1996 julkaistiin NKG96 geoidimalli, joka perustuu EGM96 globaaliin painovoimamalliin. Sen avulla johdetun alueellisen geoidimallin ratkaisemiseen on käytetty Pohjoismaiden, Baltian maiden ja Venäjän alueella tehtyjä painovoimahavaintoja (FORSBERG et al., 1999). Yli 300 GPS-vaaituspisteen avulla on todettu, että geoidimallin tarkkuus on 10 cm:n luokkaa (FORSBERG et al., 1996). NKG96 mallin geoidikorkeuksien ja GPS-vaaituspisteiden avulla lasketut geoidikorkeuksien erojen RMS on Suomessa 1 cm ja kallistuksen poistamisen jälkeen 6 cm (Kuva 3- ja BILKER et al., 003) NKG004 Uusin pohjoismaiden geoidimalli on NKG004 (FORSBERG et al., 004). Laskemiseen on käytetty NKG96 malliin nähden uutta painovoimadataa Ruotsista ja Norjasta, lentogravimetrisia havaintoja Itämereltä, Baltian maiden dataa, uutta Venäjän dataa sekä uutta korkeusmallia. Pohjana käytettiin GRACE-satelliittien havainnoista laskettua globaalia painovoimamallia GGM0S, joka on yhdistetty EGM96 mallin kanssa. NKG004 malli sopii huomattavasti paremmin GPS-vaaituskorkeuseroihin kun NKG96 malli. Suomessa NKG004 mallien geoidikorkeuksien ja GPS-vaaituspisteiden avulla lasketut geoidikorkeuksien erojen RMS on 5 cm ja kallistuksen poistamisen jälkeen 3 cm (Kuva 3-). NKG004 geoidikorkeudet ovat kuvassa
")
14 Kuva 3-3. NKG004 geoidimalli Suomen alueen vanhat geoidimallit Vuosikymmenten aikana Suomen alueelle on laskettu eri geoidimalleja. Uusin on FIN005N00 -malli joka on kuvattu luvussa Astrogeodeettinen Bomford 1970 geoidimalli Viime vuosisadan alkupuolella tiedot Maan painovoimakentästä olivat niin puutteellisia, ettei painovoiman potentiaaliin perustuva geoidimallin määrittäminen ollut mahdollista. Geoidin korkeuksien määrittäminen tehtiin tällöin astrogeodeettisella menetelmällä. Astronomisten ja geodeettisten koordinaattien välisistä eroista saadaan lasketuiksi luotiviivanpoikkeamien pohjoisja itäkomponentit, joiden avulla puolestaan voidaan johtaa havaintopaikkojen väliset geoidin korkeuserot. Kolmiomittauspisteillä tehtiin astronomiset pituus- ja leveysastehavainnot, joiden avulla saatiin selville luotiviivanpoikkeamien arvot kolmiopisteillä. Koska menetelmä antaa tulokseksi vain geoidin korkeuseroja, on lähtöpisteen geoidin korkeuden valinnalla ratkaiseva merkitys koko alueen geoidin korkeuksille. Astrogeodeettinen menetelmä antaa pääpiirteiltään todellista geoidia vastaavan pinnan. Kun laskentaan käytettiin kolmiomittauksen avulla määritettyjä geodeettisia koordinaatteja ja näiden vertauspintana oli Kansainvälinen v. 194 ellipsoidi, saatiin tulokseksi geoidimalli joka ei ole geosentrisesti sijoitettu. Tällaisen mallin geoidin korkeudet ovat sellaisen ellipsoidin suhteen, jonka pinnalla kolmiomittaus on laskettu. GL:ssä on tehty useita astrogeodeettisen geoidin määrityksiä, joista viimeisten lähtökorkeus otettiin eurooppalaisesta, v julkaistusta astrogeodeettisesta geoidista (BOMFORD, 1963). Näihin korkeuksiin liitettiin v G. Bomfordin ilmoituksen mukainen 0.9 m:n vakiokorjaus. Tälle geoidimallille annettiin nimeksi Bomford

15 3.4.. FIN95 90-luvulla johdettiin Suomen alueelle gravimetrinen geoidimalli FIN95 (Kuva 3-4). Mallin pohjana käytettiin OSU91A painovoimamallia. FIN95-mallin laskemiseen on käytetty Suomen ja naapurimaiden painovoimadataa. Geoidimalli sovitettiin 43 GPS/vaaituspisteen avulla siten, että mallin avulla voidaan GPS-korkeudet muuntaa suoraan valtakunnalliseen N60-korkeusjärjestelmään. Sovituksessa käytettyjen GPS-havaintojen epookki oli n Kun pisteiden korkeudet vertausellipsoidista muuttuvat maankohoamisen vuoksi, on aikaero GPS-havaintojen epookista otettava huomioon FIN95-geoidin korkeuksia käytettäessä. FIN95-mallin keskimääräiseksi tarkkuudeksi arvioitiin 6 cm, mutta maamme raja-alueilla, Pohjois- ja Itä-Suomessa, virheet saattavat nousta lähelle 0 cm:iä, mikä johtuu GPS/vaaituspisteiden harvalukuisuudesta näillä alueilla geoidimallin laskemisen aikoihin. FIN95-mallin tarkka kuvaus on julkaistu GL:n raportissa no. 95:5 (VERMEER, 1995). Kuva 3-4. FIN95-geoidimalli ja sen laskennassa käytetty GPS/vaaituspisteistö. 9

16 4. FIN000-geoidimalli FIN000 geoidimalli johdettiin sen jälkeen, kun 1990 luvulla oli saatu valmiiksi EUREFpisteistön tihentäminen. Sen pohjana on NKG96-geoidimalli, jota korjattiin 4. asteen polynomipinnan avulla. Korjaavan polynomipinnan kertoimet johdettiin 156:n GPS/vaaituspisteen havaintojen avulla. Pintasovituksen painoyksikön keskivirhe oli 8 mm, joka kuvaa geoidimallin sisäistä tarkkuutta. FIN000-mallin ratkaisemiseen käytettyjen GPS-havaintojen epookki on Mallin avulla voidaan muuntaa EUREF-FIN-koordinaatistossa GRS-80 ellipsoidista lasketut korkeudet valtakunnallisen N60-korkeusjärjestelmään. Seuraavissa kappaleissa kerrotaan tarkemmin FIN000-mallin laskennassa käytetyistä pisteistä ja menetelmistä Pisteet Mallin sovitukseen oli käytettävissä suuri joukko vuosina mitattuja GPS-pisteitä, joiden vaaitut korkeudet tunnetaan N60-järjestelmässä. GPS-koordinaattien osalta on tärkeää, että niiden referenssijärjestelmä on sama ja että ne kohdistuvat samaan mittausepookkiin. Mainittujen vuosien GPS-mittaukset on laskettu ETRF89-koordinaatistossa, jonka suomalaiselle realisaatiolle on annettu nimeksi EUREF-FIN. Koordinaattien mittausepookki on (OLLIKAINEN et al., 000 ja 001). Pintasovituksessa käytettiin kaikkiaan 156 vaaittua pistettä. Näiden joukossa oli 9 pysyvää GPS-asemaa (FinnRef), 6 mareografia, 34 I-luokan kolmiopistettä, 36 tarkkavaaituspistettä ja 71 MML:n vaaitsemaa pistettä. Pisteiden jakautuma maan eri puolille nähdään kuvasta Polynomipinnan ratkaiseminen GPS-korkeudet muunnettiin ensin normaalikorkeuksiksi NKG96-geoidin korkeuksien avulla. Näitä korkeuksia verrattiin pisteiden N60-järjestelmän mukaisiin ortometrisiin korkeuksiin. Ortometristen ja normaalikorkeuksien eroa ei korjattu, koska ero katsottiin niin pieneksi koko maan alueella (ks. Taulukko A-1), ettei sillä ole korkeuksien muunnoksessa käytännön merkitystä. GPS/vaaitus- ja N60-korkeuksien erotusten keskiarvo oli +338 mm. Korkeuserojen neliöllinen keskiarvo (RMS) oli puolestaan ±1 mm. Kaikki korkeuserot vaihtelivat välillä -454 mm +180 mm. Korkeuserojen keskiarvo on itseisarvoltaan suuri, koska GPS-korkeuksia ei ole redusoitu vaaitusten epookkiin Jos ETRF89-korkeuksista poistettaisiin maannousu, joka on tapahtunut GPS-mittausten epookin (1997.0) vaaitusten epookin (1960.0) välillä pienenisi korkeuserojen keskiarvo 105 mm:iin. Tämä on hyvin lähellä arvoa mm, joka saatiin Baltic Sea Level -projektin tuloksena GPS/vaaitus ja ortometristen korkeuksien vertauksesta (FORS- BERG, 1996). Pienimmän neliösumman menetelmällä ratkaistiin GPS/vaaitus- ja N60-korkeuksien eroja kuvaava polynomipinta, jonka avulla pyritään minimoimaan NKG96-mallin ja N60-korkeuksien väliset ristiriidat. Parhaan korjaavan pinnan löytämiseksi tehtiin useita kokeita. Erotukset tasoitettiin 1.,., 3. ja 4. asteen polynomipinnoiksi. Taulukossa 4-1 ovat tasoituksen jälkeiset jäännösvirheet. Jäännösvirheet pienenevät kun polynomin astelukua kasvatetaan, mutta polynomin asteluvun kasvattaminen 4. astetta suuremmaksi ei enää parantanut tulosta. Kuvassa 4- on esitetty 4. asteen polynomipinnan jäännösvirheet. Yhdistämällä NKG96-geoidimalli ja 4. asteen polynomipinta, saatiin aikaan malli, jolle annettiin nimeksi FIN000. Perinteisessä mielessä FIN000 ei ole geoidimalli, koska siinä gravimetriseen geoidiin yhdistetään GPS-mittausten ja tarkkavaaitusten avulla kerättyä informaatiota. Parhaiten FIN000-mallia kuvaa termi muunnospinta, koska sen avulla voidaan muuntaa EURF-FIN -koordinaatistossa määritetyt korkeudet kansalliseen N60-korkeusjärjestelmään. Mallin tarkkuudesta saamme kuvan jäännösvirheiden neliöllisen keskiarvon perusteella, joka on ±8 mm. Kun mallin välittämää muunnosta testattiin 154:llä testipisteellä, havaittiin suurimpien muunnosvirheiden olevan 8-9 cm (OLLIKAINEN, 00). 10

17 Taulukko 4-1. GPS/vaaitus- ja N60-korkeuksien erojen pienimmän neliösumman menetelmällä ratkaistut polynomipinnat. Jäännösvirheiden keskiarvot, neliölliset keskiarvot (RMS) sekä jäännösvirheiden maksimi- ja minimiarvot. Keskiarvo (mm) RMS (mm) Minimi (mm) ± ± ± ± ± Polynomin asteluku Maksimi (mm) Kuva 4-1. FIN000-geoidimallin laskemiseen käytetty GPS/vaaitus-pisteistö. Kuva 4-. GPS/vaaitus- ja N60-korkeuksien eroihin sovitetun 4. asteen polynomipinnan jäännösvirheet Käytetty geoidimalli: NKG96. Jäännösvirheiden RMS: ± 8 mm. 11

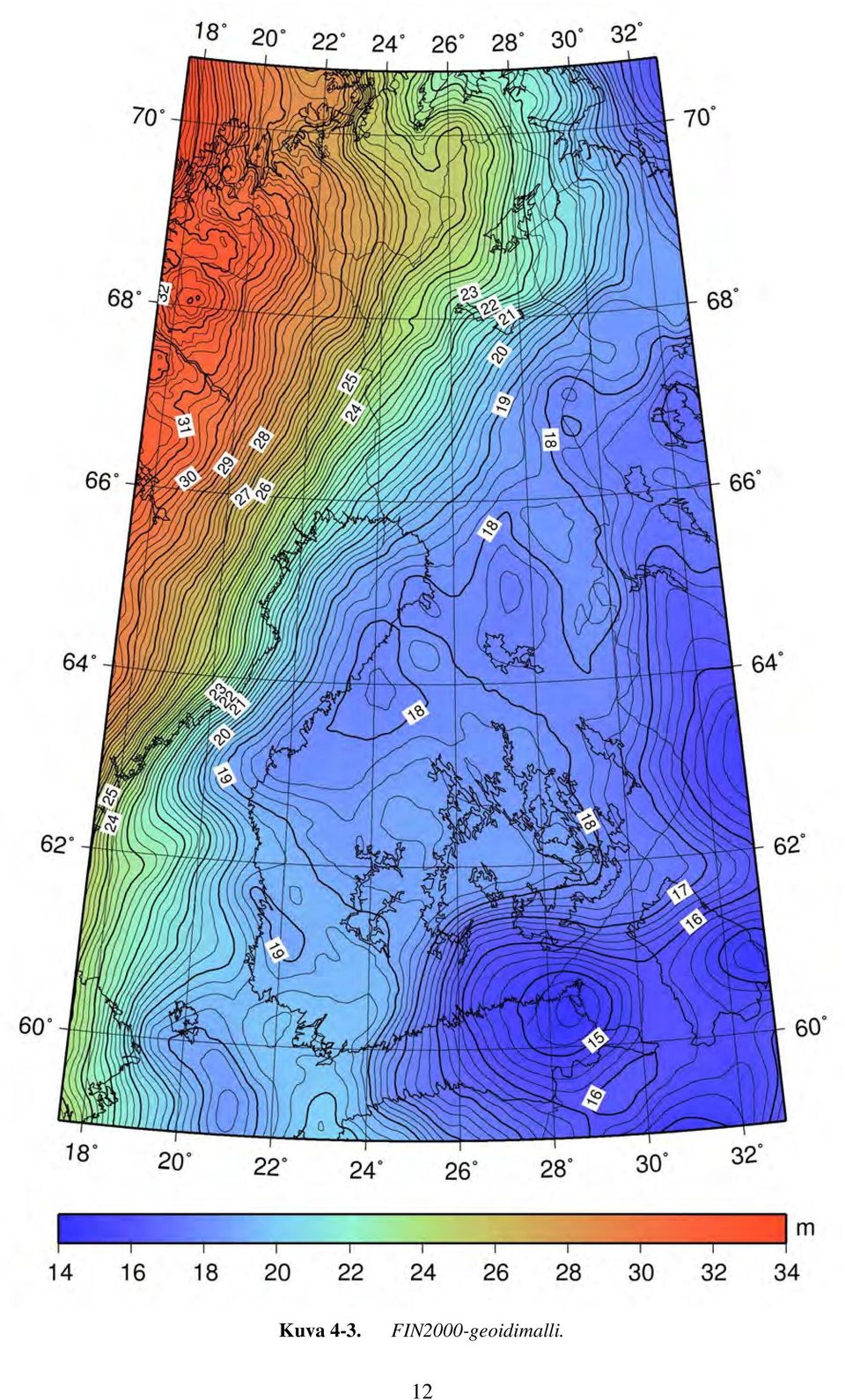
18 Kuva 4-3. FIN000-geoidimalli. 1
19 5. FIN005N00-geoidimalli Vuonna 005 ryhdyttiin kehittämään uutta geoidisovitusta Suomen alueelle. Tähän oli monta syytä. Ensimmäinen oli uuden Pohjoismaisen geoidimallin NKG004 julkaiseminen vuonna 004. Edelliseen malliin nähden NKG004-malli oli huomattavasti parempi uuden maanpäällisen painovoimadatan ja painovoimasatelliittien tuoman datan vuoksi. Toinen syy oli Suomen uuden korkeusjärjestelmän N000 luominen. Uusi korkeusjärjestelmä loi tarpeen uuden muunnospinnan määrittämiselle. Uusi sovitus tuli mahdolliseksi koska EUVN-DA kampanjasta oli saatu uusia GPS/vaaituspisteitä Havaintopisteet Geoidimallin sovittamiseen on käytetty Suomen EUVN-DA GPS/vaaitusaineistoa. Ensimmäinen EUVN (European Vertical Reference Network) kampanja järjestettiin vuonna Sen tarkoituksena oli yhdistää eurooppalaiset korkeusjärjestelmät. Suomesta kampanjassa oli mukana vain 10 asemaa. Vuonna 00 EUREF-kokouksessa päätettiin EUVN-DA (EUVN densification act) kampanjasta, jonka tarkoituksena oli lisätä pisteiden määrää. EUVN-DA:n ensimmäisessä vaiheessa tarkistettiin jo olevat GPS/vaaitusdatat ja alkuperäisten Suomen 10 EUVN pisteen lisäksi hyväksyttiin 10 vuosina EUREF-FIN-kampanjassa mitattua GPS-pistettä. Toisessa vaiheessa mitattiin 30 uutta GPS/vaaituspistettä, jotka olivat tarkkavaaituskiintopisteitä tai uusia pisteitä jotka oli vaaittu ennen GPS-kampanjaa. GPS-mittaukset suoritettiin kesällä 005. EUVN-DA:ta varten molempien kampanjojen datat redusoitiin ETRF89 koordinaatistoon epookkiin Uusien pisteiden koordinaattien tarkkuus arvioitiin kampanjoiden yhteisten pisteiden avulla. Yhteisten pisteiden koordinaattierojen RMS arvot olivat: ±3. mm, ±3.4 mm ja ±3.8 mm pohjois-, itä- ja korkeuskomponentissa. Julkaisussa OLLIKAINEN (006) on yksityiskohtaisempi kuvaus EUVN-DA kampanjasta. Geoidisovitusta varten kaikki GPS koordinaatit muunnettiin EUREF-FIN-koordinaatistoon epookissa Vuosien kampanjassa mitatut GPS-koordinaatit olivat jo valmiina EUREF-FIN-koordinaatistossa. Vuoden 005 kampanjan tulokset redusoitiin ensin ITRF000- koordinaatistosta ETRF89-koordinaatistoon käyttämällä BOUCHER:n ja ALTAMIMIn (001) julkaisemia parametreja (Kuva 5-1). Sen jälkeen koordinaatit redusoitiin epookista EUREF-FIN-epookkiin NKG:n koordinaattijärjestelmä- ja paikannustyöryhmässä kehitetyn nopeusmallin avulla (NØRBECH et al., 006). Vaakaliikkeen nopeudet otettiin BIFROST-mallista (MILNE et al., 001) ja GPS-datasta lasketuista nopeuksista (LIDBERG et al., 007). Korkeuden muutos on peräisin NKG005LU maannousumallista (VESTØL, 007; ÅGREN ja SVENSSON, 007). Lopuksi laskettiin vielä molemmissa mittauskampanjassa mukana olevien pysyvien GPS-asemien tuloksien avulla Helmert muunnos, jolla toisen kampanjan data sovitettiin EUREF-FIN-dataan (Kuva 5-1). Lopputuloksena oli 50 pisteitä joilla oli EUREF-FIN GPSkoordinaatit sekä N60 ja N000 korkeudet tarkkavaaitusverkosta (Kuva 5-). 5.. Laskelmat Sovituspinnan laskemista varten GPS-korkeudet muunnettiin normaalikorkeudeksi NKG004- geoidimallin avulla sekä laskettiin ero N000-vaaituskorkeuksiin nähden, jolloin saatiin geoidikorkeuksien väliset erot: N = h N H. (5-1) GPS NKG004 N 000 N000 vaaituskorkeuksiin verrattuna geoidierojen minimi, maksimi, keskiarvo ja keskihajonta olivat -119 mm, 69 mm, -3 mm ja 41 mm. Geoidieroihin N sovitettiin erilaisia korjauspintoja ja testattiin niiden tarkkuutta. Koska GPSvaaituspisteiden määrä oli pieni eikä testipisteitä ollut N000-korkeusjärjestelmässä, korjauspintojen tarkkuus testattiin ristiinvalidoinnin avulla. Ristiinvalidoinnissa jätettiin yksi piste pois sovituspinnan estimoinnissa ja laskettiin sen jälkeen kuinka hyvin sovitus pystyi ennustamaan geoidieron kyseiselle pisteelle. Näin käytiin kaikki pisteet läpi jolloin saatiin ulkoiset tarkkuusluvut korjauspinnoille. 13

20 EUVN_DA Tihennys 005 EUREF Tihennys EUREF-FIN GPS-ratkaisu ITRF000 Epookki: Boucher - Altamimi ETRF89 Epookki: NKG_RF03 nopeusmalli ETRF89 Epookki: Helmert muunnos ETRF89 Epookki: Kuva 5-1. EUVN-DA datan redusoinnissa ETRF89-koordinaatistoon ja epookkiin käytetty menetelmä. Kuva 5-. FIN005-geoidimallin pintasovituksessa käytetyt EUVN-DA GPS/vaaituspisteet ja Suomen kolmas tarkkavaaitusverkko. Ensimmäiset pinnat laskettiin sovittamalla eriasteisia polynomipintoja geoidieroihin: jossa: ja N = n n i a ij i= 0 j= 0 ϕ ( ϕ ϕ ϕ = ϕ ϕ max max i j ϕ λ, (5-) max + min ) min λ ( λmax + λmin ) λ =. λ λ Sovituksien tulokset paranivat kun polynomin asteluku kasvoi. Ristiinvalidoinnissa kolmannen asteen polynomi osoittautui kuitenkin parhaaksi, jolloin virheiden minimi, maksimi ja keskihajonta olivat -44 mm, 59 mm ja 1 mm. Polynomisovituksessa ongelmana on se että virheet kasvavat hyvin nopeasti sovituspisteiden peittämän alueen ulkopuolella. Suomen raja-alueilla virheet voivat olla suurempia kuin lasketut tarkkuusluvut (esim. Kuva 5-3). Lisäksi polynomit ovat pelkkiä matemaattisia pintoja, joilla ei ole mitään tekemistä fysikaalisen todellisuuden kanssa. Vaihtoehtona testattiin pienimmän neliösumman kollokaatiomenetelmä (MORITZ, 1989), jota on käytetty Tanskassa kehitetyssä GRAVSOFT-geoidilaskentaohjelmistossa (FORSBERG, 003). Pienimmän neliösumman kollokaatiossa hilapisteiden arvot estimoidaan kovarianssifunktion avulla tunnetuista pistearvoista: min 1 sˆ = C C x, (5-3) sx xx jossa C(r) on kovarianssifunktio, joka riippuu vain pisteiden välisestä etäisyydestä r ja joka kuvaa pisteiden arvojen välistä yhteyttä. Tässä tapauksessa x kuvaa GPS-vaaitusdatasta laskettuja 14

JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit
 JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit Versio: 1.0 Julkaistu: 6.9.2019 Voimassaoloaika: toistaiseksi 1 FIN2005N00 1.1 Mallin luonti ja tarkkuus FIN2005N00 on korkeusmuunnospinta,
JHS 163 Suomen korkeusjärjestelmä N2000 Liite 3. Geoidimallit Versio: 1.0 Julkaistu: 6.9.2019 Voimassaoloaika: toistaiseksi 1 FIN2005N00 1.1 Mallin luonti ja tarkkuus FIN2005N00 on korkeusmuunnospinta,
EUREF ja GPS. Matti Ollikainen Geodeettinen laitos. EUREF-päivä 29.1.2004 Teknillinen korkeakoulu Espoo
 EUREF ja GPS Matti Ollikainen Geodeettinen laitos EUREF-päivä 29.1.2004 Teknillinen korkeakoulu Espoo Kuinka EUREF sai alkunsa? EUREF (European Reference Frame) o Perustettiin Kansainvälisen geodeettisen
EUREF ja GPS Matti Ollikainen Geodeettinen laitos EUREF-päivä 29.1.2004 Teknillinen korkeakoulu Espoo Kuinka EUREF sai alkunsa? EUREF (European Reference Frame) o Perustettiin Kansainvälisen geodeettisen
EUREF-FIN JA KORKEUDET. Pasi Häkli Geodeettinen laitos 10.3.2010
 EUREF-FIN JA KORKEUDET Pasi Häkli Geodeettinen laitos 10.3.2010 EUREF-FIN:n joitain pääominaisuuksia ITRF96-koordinaatiston kautta globaalin koordinaattijärjestelmän paikallinen/kansallinen realisaatio
EUREF-FIN JA KORKEUDET Pasi Häkli Geodeettinen laitos 10.3.2010 EUREF-FIN:n joitain pääominaisuuksia ITRF96-koordinaatiston kautta globaalin koordinaattijärjestelmän paikallinen/kansallinen realisaatio
Uusi koordinaatti- ja korkeusjärjestelmä
 Uusi koordinaatti- ja korkeusjärjestelmä Markku Poutanen Geodeettinen laitos Uusi koordinaatti- ja korkeusjärjestelmä Taustaa Uuden koordinaattijärjestelmän perusteet JHS ja käyttöönotto Uusi korkeusjärjestelmä
Uusi koordinaatti- ja korkeusjärjestelmä Markku Poutanen Geodeettinen laitos Uusi koordinaatti- ja korkeusjärjestelmä Taustaa Uuden koordinaattijärjestelmän perusteet JHS ja käyttöönotto Uusi korkeusjärjestelmä
JUHTA - Julkisen hallinnon tietohallinnon neuvottelukunta
 JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 6: EUREF-FIN:n ja KKJ:n välinen kolmiulotteinen yhdenmuotoisuusmuunnos ja sen tarkkuus Versio: 1.0 / 3.2.2016
JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 6: EUREF-FIN:n ja KKJ:n välinen kolmiulotteinen yhdenmuotoisuusmuunnos ja sen tarkkuus Versio: 1.0 / 3.2.2016
Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen
 Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen Mittausten laadun tarkastus ja muunnoskertoimien laskenta Kyösti Laamanen 2.0 4.10.2013 Prosito 1 (9) SISÄLTÖ 1 YLEISTÄ...
Pieksämäen kaupunki, Euref-koordinaatistoon ja N2000 korkeusjärjestelmään siirtyminen Mittausten laadun tarkastus ja muunnoskertoimien laskenta Kyösti Laamanen 2.0 4.10.2013 Prosito 1 (9) SISÄLTÖ 1 YLEISTÄ...
KIINTOPISTEMITTAUKSET MML:ssa
 KIINTOPISTEMITTAUKSET MML:ssa ESITYKSEN SISÄLTÖ: Koordinaattijärjestelmän uudistus (EUREF-FIN) Korkeusjärjestelmän uudistus (N2000) MML:n tasokiintopistemittaukset MML:n korkeuskiintopistemittaukset Mittaukset
KIINTOPISTEMITTAUKSET MML:ssa ESITYKSEN SISÄLTÖ: Koordinaattijärjestelmän uudistus (EUREF-FIN) Korkeusjärjestelmän uudistus (N2000) MML:n tasokiintopistemittaukset MML:n korkeuskiintopistemittaukset Mittaukset
Koordinaatistoista. Markku Poutanen Geodeettinen laitos. Koordinaattijärjestelmä Koordinaatisto Karttaprojektio
 Koordinaatistoista Markku Poutanen Geodeettinen laitos Koordinaattijärjestelmä Koordinaatisto Karttaprojektio Koordinaattijärjestelmä sisältää määritelmät, Reference system contains definitions koordinaatisto
Koordinaatistoista Markku Poutanen Geodeettinen laitos Koordinaattijärjestelmä Koordinaatisto Karttaprojektio Koordinaattijärjestelmä sisältää määritelmät, Reference system contains definitions koordinaatisto
JHS 163 Suomen korkeusjärjestelmä N2000 Liite 2. Aiemmat korkeusjärjestelmät ja niiden väliset muunnokset
 JHS 163 Suomen korkeusjärjestelmä N2000 Liite 2. Aiemmat korkeusjärjestelmät ja niiden väliset muunnokset Versio: 1.0 Julkaistu: 6.9.2019 Voimassaoloaika: toistaiseksi 1 Aiemmat suomalaiset korkeusjärjestelmät
JHS 163 Suomen korkeusjärjestelmä N2000 Liite 2. Aiemmat korkeusjärjestelmät ja niiden väliset muunnokset Versio: 1.0 Julkaistu: 6.9.2019 Voimassaoloaika: toistaiseksi 1 Aiemmat suomalaiset korkeusjärjestelmät
Geodeettisen laitoksen koordinaattimuunnospalvelu
 Geodeettisen laitoksen koordinaattimuunnospalvelu Janne Kovanen Geodeettinen laitos 10.3.2010 Koordinaattimuunnospalvelusta lyhyesti Ilmainen palvelu on ollut tarjolla syksystä 2008 lähtien. Web-sovellus
Geodeettisen laitoksen koordinaattimuunnospalvelu Janne Kovanen Geodeettinen laitos 10.3.2010 Koordinaattimuunnospalvelusta lyhyesti Ilmainen palvelu on ollut tarjolla syksystä 2008 lähtien. Web-sovellus
Maanmittauspäivät 2014 Seinäjoki
 Maanmittauspäivät 2014 Seinäjoki Parempaa tarkkuutta satelliittimittauksille EUREF/N2000 - järjestelmissä Ympäristösi parhaat tekijät 2 EUREF koordinaattijärjestelmän käyttöön otto on Suomessa sujunut
Maanmittauspäivät 2014 Seinäjoki Parempaa tarkkuutta satelliittimittauksille EUREF/N2000 - järjestelmissä Ympäristösi parhaat tekijät 2 EUREF koordinaattijärjestelmän käyttöön otto on Suomessa sujunut
EUREF-FIN/N2000-MUUNNOKSET HELSINGIN KAUPUNGISSA
 1 (10) EUREF-FIN/N2000-MUUNNOKSET HELSINGIN KAUPUNGISSA 5.3.2012 2 (10) Sisältö: 1 Johdanto... 3 1.1 Muunnosasetukset paikkatieto-ohjelmistoissa... 3 1.2 Lisätiedot... 3 2 Korkeusjärjestelmän muunnos NN
1 (10) EUREF-FIN/N2000-MUUNNOKSET HELSINGIN KAUPUNGISSA 5.3.2012 2 (10) Sisältö: 1 Johdanto... 3 1.1 Muunnosasetukset paikkatieto-ohjelmistoissa... 3 1.2 Lisätiedot... 3 2 Korkeusjärjestelmän muunnos NN
TTY Mittausten koekenttä. Käyttö. Sijainti
 TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
JHS 163 Suomen korkeusjärjestelmä N2000
 JHS 163 Suomen korkeusjärjestelmä N2000 Versio: 6.6.2008 Julkaistu: 19.6.2007 Voimassaoloaika: 30.6.2010 Sisällys 1 Johdanto...... 1 2 Soveltamisala...... 2 3 Termit ja määritelmät...... 2 4 EVRF korkeusrealisaation
JHS 163 Suomen korkeusjärjestelmä N2000 Versio: 6.6.2008 Julkaistu: 19.6.2007 Voimassaoloaika: 30.6.2010 Sisällys 1 Johdanto...... 1 2 Soveltamisala...... 2 3 Termit ja määritelmät...... 2 4 EVRF korkeusrealisaation
KIINTOPISTEREKISTERI N2000-LASKENTATILANNE Matti Musto / Etelä-Suomen maanmittaustoimisto
 KIINTOPISTEREKISTERI N2000-LASKENTATILANNE 1.1.2010 Matti Musto / Etelä-Suomen maanmittaustoimisto KORKEUSKIINTOPISTELUOKITUS Ensimmäisen luokan vaaitussilmukat, sekä niiden sisäpuolella sijaitsevat, Maanmittauslaitoksen
KIINTOPISTEREKISTERI N2000-LASKENTATILANNE 1.1.2010 Matti Musto / Etelä-Suomen maanmittaustoimisto KORKEUSKIINTOPISTELUOKITUS Ensimmäisen luokan vaaitussilmukat, sekä niiden sisäpuolella sijaitsevat, Maanmittauslaitoksen
Valtakunnallinen N60 N2000-muunnos
 32 Valtakunnallinen N60 N2000-muunnos Maanmittaus 86:2 (2011) Geodesian tietoisku Valtakunnallinen N60 N2000-muunnos Mikko Ahola ja Matti Musto mikko.ahola@hel.fi matti.musto@maanmittauslaitos.fi 1 Johdanto
32 Valtakunnallinen N60 N2000-muunnos Maanmittaus 86:2 (2011) Geodesian tietoisku Valtakunnallinen N60 N2000-muunnos Mikko Ahola ja Matti Musto mikko.ahola@hel.fi matti.musto@maanmittauslaitos.fi 1 Johdanto
JHS XXX EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa
 JHS XXX EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa Versio: 29.9.2014 (luonnos palautekierrosta varten) Julkaistu: Voimassaoloaika: toistaiseksi Sisällys 1 Johdanto...
JHS XXX EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa Versio: 29.9.2014 (luonnos palautekierrosta varten) Julkaistu: Voimassaoloaika: toistaiseksi Sisällys 1 Johdanto...
Koordinaattijärjestelmä Koordinaatisto Karttaprojektio
 Koordinaattijärjestelmä Koordinaatisto Karttaprojektio Koordinaattijärjestelmä sisältää määritelmät, koordinaatisto on sen realisaatio maastossa ja karttaprojektio tämän esitysmuoto kaksiulotteisella kartalla
Koordinaattijärjestelmä Koordinaatisto Karttaprojektio Koordinaattijärjestelmä sisältää määritelmät, koordinaatisto on sen realisaatio maastossa ja karttaprojektio tämän esitysmuoto kaksiulotteisella kartalla
Radiotekniikan sovelluksia
 Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
Poutanen: GPS-paikanmääritys sivut 72 90 Kai Hahtokari 11.2.2002 Konventionaalinen inertiaalijärjestelmä (CIS) Järjestelmä, jossa z - akseli osoittaa maapallon impulssimomenttivektorin suuntaan standardiepookkina
EUREF-FIN/N2000 käyttöönotto Helsingissä
 EUREF-FIN/N2000 käyttöönotto Helsingissä http://www.hel.fi/hki/kv/fi/kaupunkimittausosasto/kartat+ja+paikkatiedot/koordinaatisto Muutokset Helsngissä: Korkeusjärjestelmä: Tasokoordinaatisto: Pohjoiskoordinaatti
EUREF-FIN/N2000 käyttöönotto Helsingissä http://www.hel.fi/hki/kv/fi/kaupunkimittausosasto/kartat+ja+paikkatiedot/koordinaatisto Muutokset Helsngissä: Korkeusjärjestelmä: Tasokoordinaatisto: Pohjoiskoordinaatti
Palautekooste: JHS 153 / JHS XXX EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa
 Palautekooste: JHS 153 / JHS XXX EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa 1. Organisaatio - Yksityishenkilö - Yksityishenkilö - Puolustusvoimat - Joensuun kaupunki - Sosiaali- ja terveysministeriö
Palautekooste: JHS 153 / JHS XXX EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa 1. Organisaatio - Yksityishenkilö - Yksityishenkilö - Puolustusvoimat - Joensuun kaupunki - Sosiaali- ja terveysministeriö
JHS 196 EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa
 JHS 196 EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa JHS 197 EUREF-FIN - koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako MARKKU POUTANEN Paikkatietokeskus FGI Taustaa
JHS 196 EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa JHS 197 EUREF-FIN - koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako MARKKU POUTANEN Paikkatietokeskus FGI Taustaa
Tarkkavaaituksilla määritetty vuosittainen maannousu Suomen alueella
 Tarkkavaaituksilla määritetty vuosittainen maannousu Suomen alueella Abstract Veikko Saaranen Geodeettinen laitos, PL 15, 02431 Masala Veikko.Saaranen@fgi.fi Land uplift rates relative to mean sea level
Tarkkavaaituksilla määritetty vuosittainen maannousu Suomen alueella Abstract Veikko Saaranen Geodeettinen laitos, PL 15, 02431 Masala Veikko.Saaranen@fgi.fi Land uplift rates relative to mean sea level
JHS 196 EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa
 JHS 1 EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa Versio: 1.0 / 7..016 Julkaistu: 5.4.016 Voimassaoloaika: toistaiseksi Sisällys 1 Johdanto... 1 Soveltamisala... 3 Viittaukset... 4 Termit ja
JHS 1 EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa Versio: 1.0 / 7..016 Julkaistu: 5.4.016 Voimassaoloaika: toistaiseksi Sisällys 1 Johdanto... 1 Soveltamisala... 3 Viittaukset... 4 Termit ja
Palautekooste ja työryhmän vastine (1. vaihe): JHS 163 Suomen korkeusjärjestelmä N2000 -päivitys
: JHS 163 Suomen korkeusjärjestelmä N2000 -päivitys") Palautekooste ja työryhmän vastine (1. vaihe): JHS 163 Suomen korkeusjärjestelmä N2000 -päivitys 15.10.2018 1. Organisaatio 5 Lohjan kaupunki Kyyjärven kunta Rääkkylän kunta Virtain kaupunki Paimion kaupunki
Palautekooste ja työryhmän vastine (1. vaihe): JHS 163 Suomen korkeusjärjestelmä N2000 -päivitys 15.10.2018 1. Organisaatio 5 Lohjan kaupunki Kyyjärven kunta Rääkkylän kunta Virtain kaupunki Paimion kaupunki
JHS 163 Suomen korkeusjärjestelmä N2000
 JHS 163 Suomen korkeusjärjestelmä N2000 Versio: 6.6.2008 Julkaistu: 19.6.2007 Voimassaoloaika: 30.6.2010 Sisällys 1 Johdanto... 1 2 Soveltamisala... 2 3 Termit ja määritelmät... 2 4 EVRF-korkeusrealisaation
JHS 163 Suomen korkeusjärjestelmä N2000 Versio: 6.6.2008 Julkaistu: 19.6.2007 Voimassaoloaika: 30.6.2010 Sisällys 1 Johdanto... 1 2 Soveltamisala... 2 3 Termit ja määritelmät... 2 4 EVRF-korkeusrealisaation
ETRS-GK25 JA N2000. Uuden koordinaatti- ja korkeusjärjestelmän käyttöönotto Vantaalla. Mittausosasto Kaupunkimittausinsinööri Kimmo Junttila
 ETRS-GK25 JA N2000 Uuden koordinaatti- ja korkeusjärjestelmän käyttöönotto Vantaalla Mittausosasto Kaupunkimittausinsinööri Taitekohtia Vantaalla kolmioverkon GPS-mittaukset ja tasoitus 1990-luvulla paikallinen
ETRS-GK25 JA N2000 Uuden koordinaatti- ja korkeusjärjestelmän käyttöönotto Vantaalla Mittausosasto Kaupunkimittausinsinööri Taitekohtia Vantaalla kolmioverkon GPS-mittaukset ja tasoitus 1990-luvulla paikallinen
Rauman kaupungin siirtyminen EUREF-FIN-tasokoordinaatistoon ja N2000-korkeusjärjestelmään. Ari-Pekka Asikainen kiinteistö- ja mittaustoimi 13.9.
 Rauman kaupungin siirtyminen EUREF-FIN-tasokoordinaatistoon ja N2000-korkeusjärjestelmään Ari-Pekka Asikainen kiinteistö- ja mittaustoimi 13.9.2012 Johdanto sisältöön Menneiden ja nykyisten järjestelmien
Rauman kaupungin siirtyminen EUREF-FIN-tasokoordinaatistoon ja N2000-korkeusjärjestelmään Ari-Pekka Asikainen kiinteistö- ja mittaustoimi 13.9.2012 Johdanto sisältöön Menneiden ja nykyisten järjestelmien
Koordinaattimuunnospalvelut Reino Ruotsalainen
 Koordinaattimuunnospalvelut 11.12.2009 Reino Ruotsalainen MAANMITTAUSLAITOS TIETOA MAASTA 2009 Lisätietoja: http://www.fgi.fi/julkaisut/pdf/gltiedote30.pdf Geodeettisen laitoksen tiedote 30/2009: SUOMEN
Koordinaattimuunnospalvelut 11.12.2009 Reino Ruotsalainen MAANMITTAUSLAITOS TIETOA MAASTA 2009 Lisätietoja: http://www.fgi.fi/julkaisut/pdf/gltiedote30.pdf Geodeettisen laitoksen tiedote 30/2009: SUOMEN
JHS 154 ETRS89-järjestelmään liittyvät karttaprojektiot, tasokoordinaatistot ja karttalehtijako
 JHS 154 ETRS89-järjestelmään liittyvät karttaprojektiot, tasokoordinaatistot ja karttalehtijako Versio: Julkaistu: Voimassaoloaika: Toistaiseksi Sisällys 1 Johdanto... 1 2 Soveltamisala... 2 3 Viittaukset...
JHS 154 ETRS89-järjestelmään liittyvät karttaprojektiot, tasokoordinaatistot ja karttalehtijako Versio: Julkaistu: Voimassaoloaika: Toistaiseksi Sisällys 1 Johdanto... 1 2 Soveltamisala... 2 3 Viittaukset...
Koordinaatit, korkeus, kartat ja GPS
 Koordinaatit, korkeus, kartat ja GPS Markku Poutanen Geodeettinen laitos Markku.Poutanen@fgi.fi Paikan esittämiseen tarvitaan koordinaatit. Vaikka koordinaattien tuottaminen onkin GPS-mittausten perustehtäviä,
Koordinaatit, korkeus, kartat ja GPS Markku Poutanen Geodeettinen laitos Markku.Poutanen@fgi.fi Paikan esittämiseen tarvitaan koordinaatit. Vaikka koordinaattien tuottaminen onkin GPS-mittausten perustehtäviä,
Paikkatietoon liittyvistä JHShankkeista. Pekka Sarkola Paikkatiedon JHS ohjausryhmä
 Paikkatietoon liittyvistä JHShankkeista Pekka Sarkola Paikkatiedon JHS ohjausryhmä Esityksen sisältö Paikkatiedon JHS ohjausryhmä Voimassaolevat paikkatiedon JHS:t Työryhmävaiheessa olevat hankkeet Suunnitteilla
Paikkatietoon liittyvistä JHShankkeista Pekka Sarkola Paikkatiedon JHS ohjausryhmä Esityksen sisältö Paikkatiedon JHS ohjausryhmä Voimassaolevat paikkatiedon JHS:t Työryhmävaiheessa olevat hankkeet Suunnitteilla
JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 2: Projektiokaavat
 JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 2: Projektiokaavat Versio: 1.0 / 5.2.2016 Julkaistu: 5.4.2016 Voimassaoloaika: toistaiseksi Sisällys 1
JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Liite 2: Projektiokaavat Versio: 1.0 / 5.2.2016 Julkaistu: 5.4.2016 Voimassaoloaika: toistaiseksi Sisällys 1
Lahden kaupungin N2000- korkeusjärjestelmävaihdos. Petri Honkanen, Lahden kaupunki Tekninen- ja ympäristötoimiala,maankäyttö
 Lahden kaupungin N2000- korkeusjärjestelmävaihdos Miksi siirtyä N2000-järjestelmään? Maannousu Lahden seudulla maannousu 50:ssä vuodessa n. 26 cm. Kiinnostus maannousun epätasaisessa toteumassa Ongelmat
Lahden kaupungin N2000- korkeusjärjestelmävaihdos Miksi siirtyä N2000-järjestelmään? Maannousu Lahden seudulla maannousu 50:ssä vuodessa n. 26 cm. Kiinnostus maannousun epätasaisessa toteumassa Ongelmat
KOORDINAATTI- JA KORKEUSJÄRJESTELMIEN VAIHTO TURUSSA 15.2.2010
 KOORDINAATTI- JA KORKEUSJÄRJESTELMIEN VAIHTO TURUSSA 15.2.2010 Ilkka Saarimäki Kaupungingeodeetti Kiinteistöliikelaitos Kaupunkimittauspalvelut ilkka.saarimaki@turku.fi VANHAT JÄRJESTELMÄT Turun kaupungissa
KOORDINAATTI- JA KORKEUSJÄRJESTELMIEN VAIHTO TURUSSA 15.2.2010 Ilkka Saarimäki Kaupungingeodeetti Kiinteistöliikelaitos Kaupunkimittauspalvelut ilkka.saarimaki@turku.fi VANHAT JÄRJESTELMÄT Turun kaupungissa
ETRS89- kiintopisteistön nykyisyys ja tulevaisuus. Jyrki Puupponen Kartastoinsinööri Etelä-Suomen maanmittaustoimisto
 ETRS89- kiintopisteistön nykyisyys ja tulevaisuus Jyrki Puupponen Kartastoinsinööri Etelä-Suomen maanmittaustoimisto Valtakunnalliset kolmiomittaukset alkavat. Helsingin järjestelmä (vanha valtion järjestelmä)
ETRS89- kiintopisteistön nykyisyys ja tulevaisuus Jyrki Puupponen Kartastoinsinööri Etelä-Suomen maanmittaustoimisto Valtakunnalliset kolmiomittaukset alkavat. Helsingin järjestelmä (vanha valtion järjestelmä)
Markku.Poutanen@fgi.fi
 Global Navigation Satellite Systems GNSS Markku.Poutanen@fgi.fi Kirjallisuutta Poutanen: GPS paikanmääritys, Ursa HUOM: osin vanhentunut, ajantasaistukseen luennolla ilmoitettava materiaali (erit. suomalaiset
Global Navigation Satellite Systems GNSS Markku.Poutanen@fgi.fi Kirjallisuutta Poutanen: GPS paikanmääritys, Ursa HUOM: osin vanhentunut, ajantasaistukseen luennolla ilmoitettava materiaali (erit. suomalaiset
JHS-suositus(luonnos): Kiintopistemittaus EUREF-FIN koordinaattijärjestelmässä
: Kiintopistemittaus EUREF-FIN koordinaattijärjestelmässä") JHS-suositus(luonnos): Kiintopistemittaus EUREF-FIN koordinaattijärjestelmässä EUREF-II -päivä 2012 Marko Ollikainen Kehittämiskeskus Maanmittauslaitos MAANMITTAUSLAITOS TIETOA MAASTA Mittausohjeiden uudistamisesta
JHS-suositus(luonnos): Kiintopistemittaus EUREF-FIN koordinaattijärjestelmässä EUREF-II -päivä 2012 Marko Ollikainen Kehittämiskeskus Maanmittauslaitos MAANMITTAUSLAITOS TIETOA MAASTA Mittausohjeiden uudistamisesta
Palautekooste ja työryhmän vastine (1. vaihe): JHS 163 Suomen korkeusjärjestelmä N2000 -päivitys
: JHS 163 Suomen korkeusjärjestelmä N2000 -päivitys") Palautekooste ja työryhmän vastine (1. vaihe): JHS 163 Suomen korkeusjärjestelmä N2000 -päivitys 11.2.2019 1. Organisaatio 5 Lohjan kaupunki Kyyjärven kunta Rääkkylän kunta Virtain kaupunki Paimion kaupunki
Palautekooste ja työryhmän vastine (1. vaihe): JHS 163 Suomen korkeusjärjestelmä N2000 -päivitys 11.2.2019 1. Organisaatio 5 Lohjan kaupunki Kyyjärven kunta Rääkkylän kunta Virtain kaupunki Paimion kaupunki
Korkeusjärjestelmän muutos ja niiden sijoittuminen tulevaisuuteen
 Rakennusvalvontamittaus 15.02.2010-> Korkeusjärjestelmän muutos ja niiden sijoittuminen tulevaisuuteen Ongelmat suurimmillaan parin vuoden kuluttua, kun maastossa on yhtä paljon uuden korkeusjärjestelmän
Rakennusvalvontamittaus 15.02.2010-> Korkeusjärjestelmän muutos ja niiden sijoittuminen tulevaisuuteen Ongelmat suurimmillaan parin vuoden kuluttua, kun maastossa on yhtä paljon uuden korkeusjärjestelmän
JHS-suositus 184: Kiintopistemittaus EUREF-FINkoordinaattijärjestelmässä. Pasi Häkli Geodeettinen laitos
 JHS-suositus 184: Kiintopistemittaus EUREF-FINkoordinaattijärjestelmässä Pasi Häkli Geodeettinen laitos Geodesian teemapäivä, Tieteiden talo, 10.9.2014 Taustaa Kiintopistemittaukset on perinteisesti tehty
JHS-suositus 184: Kiintopistemittaus EUREF-FINkoordinaattijärjestelmässä Pasi Häkli Geodeettinen laitos Geodesian teemapäivä, Tieteiden talo, 10.9.2014 Taustaa Kiintopistemittaukset on perinteisesti tehty
Staattisen GPS-mittauksen geodeettisesta 3D-tarkkuudesta
 Maanmittaus 83:2 (2008) 5 Maanmittaus 83:2 (2008) Saapunut 4.3.2008 ja tarkistettuna 16.5.2008 Hyväksytty 26.6.2008 Staattisen GPS-mittauksen geodeettisesta 3D-tarkkuudesta Pasi Häkli, Hannu Koivula ja
Maanmittaus 83:2 (2008) 5 Maanmittaus 83:2 (2008) Saapunut 4.3.2008 ja tarkistettuna 16.5.2008 Hyväksytty 26.6.2008 Staattisen GPS-mittauksen geodeettisesta 3D-tarkkuudesta Pasi Häkli, Hannu Koivula ja
Mittaushavaintojen täsmällinen käsittelymenenetelmä
 Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
Tasoituslaskun periaate Kun mittauksia on tehty enemmän kuin on toisistaan teoreettisesti riippumattomia suureita, niin tasoituslaskun tehtävänä ja päätarkoituksena on johtaa tuntemattomille sellaiset
VAISALAN STATOSKOOPPIEN KÄYTTÖÖN PERUSTUVASTA KORKEUDEN-
 Q 16.1/21/73/1 Seppo Elo 1973-11-16 GEOLOGINEN TUTKIMUSLAITOS Geofysiikan osasto Painovoimapisteiden korkeuden mittauksesta statoskoopeilla VAISALAN STATOSKOOPPIEN KÄYTTÖÖN PERUSTUVASTA KORKEUDEN- MÄARITYKSESTA
Q 16.1/21/73/1 Seppo Elo 1973-11-16 GEOLOGINEN TUTKIMUSLAITOS Geofysiikan osasto Painovoimapisteiden korkeuden mittauksesta statoskoopeilla VAISALAN STATOSKOOPPIEN KÄYTTÖÖN PERUSTUVASTA KORKEUDEN- MÄARITYKSESTA
Sipoon kunnan EUREF-hanke. Aalto-yliopiston insinööritieteiden korkeakoulun maankäyttötieteiden laitoksella tehty diplomityö. Espoo, syyskuu 2012
 Sipoon kunnan EUREF-hanke Aalto-yliopiston insinööritieteiden korkeakoulun maankäyttötieteiden laitoksella tehty diplomityö Espoo, syyskuu 2012 Insinööri (AMK) Ville Jussila Valvoja: Professori Martin
Sipoon kunnan EUREF-hanke Aalto-yliopiston insinööritieteiden korkeakoulun maankäyttötieteiden laitoksella tehty diplomityö Espoo, syyskuu 2012 Insinööri (AMK) Ville Jussila Valvoja: Professori Martin
GPS-koulutus Eräkarkku Petri Kuusela. p
 GPS-koulutus 2018 Eräkarkku Petri Kuusela tulirauta@gmail.com p. 040 772 3720 GPS toiminnallisuudet Missä olen (koordinaatit, kartalla) Opasta minut (navigointi) Paljonko matkaa (navigointi maastossa)
GPS-koulutus 2018 Eräkarkku Petri Kuusela tulirauta@gmail.com p. 040 772 3720 GPS toiminnallisuudet Missä olen (koordinaatit, kartalla) Opasta minut (navigointi) Paljonko matkaa (navigointi maastossa)
Fysiikan laboratoriotyöt 1, työ nro: 2, Harmoninen värähtelijä
 Fysiikan laboratoriotyöt 1, työ nro: 2, Harmoninen värähtelijä Tekijä: Mikko Laine Tekijän sähköpostiosoite: miklaine@student.oulu.fi Koulutusohjelma: Fysiikka Mittausten suorituspäivä: 04.02.2013 Työn
Fysiikan laboratoriotyöt 1, työ nro: 2, Harmoninen värähtelijä Tekijä: Mikko Laine Tekijän sähköpostiosoite: miklaine@student.oulu.fi Koulutusohjelma: Fysiikka Mittausten suorituspäivä: 04.02.2013 Työn
GPS:n käyttömahdollisuudet mareografitutkimuksessa
 GPS:n käyttömahdollisuudet mareografitutkimuksessa Maaria Tervo, Markku Poutanen ja Hannu Koivula Geodeettinen laitos, maaria.tervo@fgi.fi Abstract Sea level monitoring is an important part of oceanography
GPS:n käyttömahdollisuudet mareografitutkimuksessa Maaria Tervo, Markku Poutanen ja Hannu Koivula Geodeettinen laitos, maaria.tervo@fgi.fi Abstract Sea level monitoring is an important part of oceanography
Palautekooste ja työryhmän vastine: JHS 153 / JHS XXX EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa
 kooste ja työryhmän vastine: JHS 153 / JHS XXX EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa 1. Organisaatio Vastaajien määrä: 9 - Yksityishenkilö - Yksityishenkilö - Puolustusvoimat - Joensuun
kooste ja työryhmän vastine: JHS 153 / JHS XXX EUREF-FIN -järjestelmän mukaiset koordinaatit Suomessa 1. Organisaatio Vastaajien määrä: 9 - Yksityishenkilö - Yksityishenkilö - Puolustusvoimat - Joensuun
LIITE 1 VIRHEEN ARVIOINNISTA
 1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
LIITE 1 VIRHEEN ARVIOINNISTA
 1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
1. PERUSKÄSITTEITÄ 1.1 MAAPALLON MUOTO
 1. PERUSKÄSITTEITÄ 1.1 MAAPALLON MUOTO Vertausellipsoidi Geoidi Geoidi on valtamerien keskivedenpintaan liittyvä pinta, jolla painovoima on vakio ja joka on kohtisuorassa luotiviivan suuntaa vastaan. Geodeettiset
1. PERUSKÄSITTEITÄ 1.1 MAAPALLON MUOTO Vertausellipsoidi Geoidi Geoidi on valtamerien keskivedenpintaan liittyvä pinta, jolla painovoima on vakio ja joka on kohtisuorassa luotiviivan suuntaa vastaan. Geodeettiset
ETRS89:n ja N2000:n käyttöönotosta
 ETRS89:n ja N2000:n käyttöönotosta Esitelmän sisältö: Miksi pitäisi vaihtaa? Mihin vaihtaa? ETRS89 - koordinaattijärjestelmä N2000- korkeusjärjestelmä Uuden järjestelmän käyttöönotto Käyttöönottoprosessi
ETRS89:n ja N2000:n käyttöönotosta Esitelmän sisältö: Miksi pitäisi vaihtaa? Mihin vaihtaa? ETRS89 - koordinaattijärjestelmä N2000- korkeusjärjestelmä Uuden järjestelmän käyttöönotto Käyttöönottoprosessi
LAHDEN KAUPUNGIN TASO- JA KORKEUSJÄRJESTELMIEN VAIHTAMINEN EUREF-FIN JA N2000-JÄRJESTELMIIN
 AALTO-YLIOPISTO Insinööritieteiden ja arkkitehtuurin tiedekunta Maanmittaustieteiden laitos LAHDEN KAUPUNGIN TASO- JA KORKEUSJÄRJESTELMIEN VAIHTAMINEN EUREF-FIN JA N2000-JÄRJESTELMIIN Aalto-yliopiston
AALTO-YLIOPISTO Insinööritieteiden ja arkkitehtuurin tiedekunta Maanmittaustieteiden laitos LAHDEN KAUPUNGIN TASO- JA KORKEUSJÄRJESTELMIEN VAIHTAMINEN EUREF-FIN JA N2000-JÄRJESTELMIIN Aalto-yliopiston
RAPORTTI 04013522 12lUMVl2001. Urpo Vihreäpuu. Jakelu. OKMElOutokumpu 2 kpl PAMPALON RTK-KIINTOPISTEET. Sijainti 1:50 000. Avainsanat: RTK-mittaus
 RAPORTTI 04013522 12lUMVl2001 Urpo Vihreäpuu Jakelu OKMElOutokumpu 2 kpl PAMPALON RTK-KIINTOPISTEET - 4333 07 Sijainti 1:50 000 Avainsanat: RTK-mittaus OUTOKUMPU MINING OY Mairninetsnnta RAPORTTI 04013522
RAPORTTI 04013522 12lUMVl2001 Urpo Vihreäpuu Jakelu OKMElOutokumpu 2 kpl PAMPALON RTK-KIINTOPISTEET - 4333 07 Sijainti 1:50 000 Avainsanat: RTK-mittaus OUTOKUMPU MINING OY Mairninetsnnta RAPORTTI 04013522
JHS 154 ETRS89-järjestelmään liittyvät karttaprojektiot, tasokoordinaatistot ja karttalehtijako, Liite 1: Projektiokaavat
 LUONNOS 008-09-0 JHS 15 ETRS89-järjestelmään liittyvät karttaprojektiot, tasokoordinaatistot ja karttalehtijako, Liite 1: Projektiokaavat Versio: Julkaistu: Voimassaoloaika: Toistaiseksi Transverse Mercator-projektiolle
LUONNOS 008-09-0 JHS 15 ETRS89-järjestelmään liittyvät karttaprojektiot, tasokoordinaatistot ja karttalehtijako, Liite 1: Projektiokaavat Versio: Julkaistu: Voimassaoloaika: Toistaiseksi Transverse Mercator-projektiolle
Pohjajarven vuosilustoisten sedimenttien paleomagneettinen tutkimus: Paleosekulaarivaihtelu Suomessa viimeisten 3200 vuoden aikana
 Raportti Q29.119612 Timo J. Saarinen Geofysiikan osasto Gtk Pohjajarven vuosilustoisten sedimenttien paleomagneettinen tutkimus: Paleosekulaarivaihtelu Suomessa viimeisten 3200 vuoden aikana Paleomagnetic
Raportti Q29.119612 Timo J. Saarinen Geofysiikan osasto Gtk Pohjajarven vuosilustoisten sedimenttien paleomagneettinen tutkimus: Paleosekulaarivaihtelu Suomessa viimeisten 3200 vuoden aikana Paleomagnetic
PAINOVOIMAMITTAUKSET JA KALLIONPINNAN SYVYYSTULKINNAT
 1 (24) PAINOVOIMAMITTAUKSET JA KALLIONPINNAN SYVYYSTULKINNAT Tuire Valjus Menetelmän perusteista Painovoimamittausten avulla voidaan tutkia tiheydeltään ympäristöstä poikkeavien muodostumien paksuutta
1 (24) PAINOVOIMAMITTAUKSET JA KALLIONPINNAN SYVYYSTULKINNAT Tuire Valjus Menetelmän perusteista Painovoimamittausten avulla voidaan tutkia tiheydeltään ympäristöstä poikkeavien muodostumien paksuutta
N2000 korkeusjärjestelmään siirtyminen Kotkan kaupungin valtuustosali 9.10.2015
 N2000 korkeusjärjestelmään siirtyminen Kotkan kaupungin valtuustosali 9.10.2015 Sisältöä: Suomessa käytössä olevat valtakunnalliset korkeusjärjestelmät Miksi N2000 - korkeusjärjestelmään siirrytään? Kotkan
N2000 korkeusjärjestelmään siirtyminen Kotkan kaupungin valtuustosali 9.10.2015 Sisältöä: Suomessa käytössä olevat valtakunnalliset korkeusjärjestelmät Miksi N2000 - korkeusjärjestelmään siirrytään? Kotkan
KOORDINAATTEJA KARTTAPALVELUIHIN Koordinaattien ohjelmallinen muuntaminen
 Heli Manninen KOORDINAATTEJA KARTTAPALVELUIHIN Koordinaattien ohjelmallinen muuntaminen Opinnäytetyö Tietojenkäsittelyn koulutusohjelma Maaliskuu 2011 KUVAILULEHTI Opinnäytetyön päivämäärä 11.3.2011 Tekijä(t)
Heli Manninen KOORDINAATTEJA KARTTAPALVELUIHIN Koordinaattien ohjelmallinen muuntaminen Opinnäytetyö Tietojenkäsittelyn koulutusohjelma Maaliskuu 2011 KUVAILULEHTI Opinnäytetyön päivämäärä 11.3.2011 Tekijä(t)
LIITE 1 VIRHEEN ARVIOINNISTA
 Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Geodeettisen laitoksen muunnospalvelun käyttöohje
 Geodeettisen laitoksen muunnospalvelun käyttöohje Versio 1.2 1 Käyttöohje - Koordinaattimuunnokset 1.1 Yleisesti Ohjelmassa on jaettu sivuston vasemmalle puolelle lähtötiedot ja oikealle puolelle kohdetiedot.
Geodeettisen laitoksen muunnospalvelun käyttöohje Versio 1.2 1 Käyttöohje - Koordinaattimuunnokset 1.1 Yleisesti Ohjelmassa on jaettu sivuston vasemmalle puolelle lähtötiedot ja oikealle puolelle kohdetiedot.
EUREF-Teemapäivä II 04.09.2012, Tieteiden talo
 EUREF-Teemapäivä II 04.09.2012, Tieteiden talo KOORDINAATTI- JA KORKEUSJÄRJESTELMIEN VAIHTO Porissa ja Porin seudulla Kalervo Salonen / Seppo Mäkeläinen 04.09.2012 Miksi juuri nyt ( v. 2008 / syksy 2010
EUREF-Teemapäivä II 04.09.2012, Tieteiden talo KOORDINAATTI- JA KORKEUSJÄRJESTELMIEN VAIHTO Porissa ja Porin seudulla Kalervo Salonen / Seppo Mäkeläinen 04.09.2012 Miksi juuri nyt ( v. 2008 / syksy 2010
Miehittämättömän lennokin ottamien ilmakuvien käyttö energiakäyttöön soveltuvien biomassojen määrän nopeassa arvioinnissa
 Miehittämättömän lennokin ottamien ilmakuvien käyttö energiakäyttöön soveltuvien biomassojen määrän nopeassa arvioinnissa Anna Lopatina, Itä-Suomen yliopisto, Metsätieteiden osasto, Anna.lopatina@uef.fi
Miehittämättömän lennokin ottamien ilmakuvien käyttö energiakäyttöön soveltuvien biomassojen määrän nopeassa arvioinnissa Anna Lopatina, Itä-Suomen yliopisto, Metsätieteiden osasto, Anna.lopatina@uef.fi
FOTOGRAMMETRINEN PISTETIHENNYS
 FOTOGRAMMETRINEN PISTETIHENNYS 1. Yleistä 2. Ilmakuvaus SKM Gisair Oy Työssä määritettiin ulkoinen orientointi Sotkamon kunnan keskustan alueen ilmakuvaukselle. Ilmakuvauksen teki SKM Gisair Oy keväällä
FOTOGRAMMETRINEN PISTETIHENNYS 1. Yleistä 2. Ilmakuvaus SKM Gisair Oy Työssä määritettiin ulkoinen orientointi Sotkamon kunnan keskustan alueen ilmakuvaukselle. Ilmakuvauksen teki SKM Gisair Oy keväällä
Geologian tutkimuskeskus Q 19/2041/2006/1 20.11.2006 Espoo JÄTEKASOJEN PAINUMAHAVAINTOJA ÄMMÄSSUON JÄTTEENKÄSITTELYKESKUKSESSA 1999-2006.
 Geologian tutkimuskeskus Q 19/2041/2006/1 20.11.2006 Espoo JÄTEKASOJEN PAINUMAHAVAINTOJA ÄMMÄSSUON JÄTTEENKÄSITTELYKESKUKSESSA 1999-2006 Seppo Elo - 2 - GEOLOGIAN TUTKIMUSKESKUS Tekijät Seppo Elo KUVAILULEHTI
Geologian tutkimuskeskus Q 19/2041/2006/1 20.11.2006 Espoo JÄTEKASOJEN PAINUMAHAVAINTOJA ÄMMÄSSUON JÄTTEENKÄSITTELYKESKUKSESSA 1999-2006 Seppo Elo - 2 - GEOLOGIAN TUTKIMUSKESKUS Tekijät Seppo Elo KUVAILULEHTI
Ympäristötiedon keruu MAA-C2001
 01 01 01 01 01 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 Ympäristötiedon keruu MAA-C2001 luento 5: Korkeudet, korkeusjärjestelmät, geopotentiaali ja geoidi Martin Vermeer
01 01 01 01 01 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 Ympäristötiedon keruu MAA-C2001 luento 5: Korkeudet, korkeusjärjestelmät, geopotentiaali ja geoidi Martin Vermeer
TURKU. http://fi.wikipedia.org/wiki/turku
 Turun kaupungin maastomittauspalvelut ja koordinaaattijärjestelmän vaihto käytännössä Tampereen seutukunnan maanmittauspäivät Ikaalisten kylpylässä 17.-18.3.2010, Harri Kottonen Kuka Harri Kottonen, Mittaustyöpäällikkö
Turun kaupungin maastomittauspalvelut ja koordinaaattijärjestelmän vaihto käytännössä Tampereen seutukunnan maanmittauspäivät Ikaalisten kylpylässä 17.-18.3.2010, Harri Kottonen Kuka Harri Kottonen, Mittaustyöpäällikkö
OUTOKUMPU OY 0 K MALMINETSINTA
 Q OUTOKUMPU OY 0 K MALMINETSINTA TUTKIMUSRUNGON MITTAUS SUOMUSSALMEN AITTOJARVELLA Vanha lin joitus Alueella oli tavanomainen geofysikaalisia mittauksia varten tehty linjoitus, johon myös kairaus on sidottu.
Q OUTOKUMPU OY 0 K MALMINETSINTA TUTKIMUSRUNGON MITTAUS SUOMUSSALMEN AITTOJARVELLA Vanha lin joitus Alueella oli tavanomainen geofysikaalisia mittauksia varten tehty linjoitus, johon myös kairaus on sidottu.
Hämeen alueen kallioperän topografiamalli
 GEOLOGIAN TUTKIMUSKESKUS Kalliorakentaminen ja sijoituspaikat Espoo 98/2016 Hämeen alueen kallioperän topografiamalli Mira Markovaara-Koivisto GEOLOGIAN TUTKIMUSKESKUS Ylätunnisteen lisäteksti Sisällysluettelo
GEOLOGIAN TUTKIMUSKESKUS Kalliorakentaminen ja sijoituspaikat Espoo 98/2016 Hämeen alueen kallioperän topografiamalli Mira Markovaara-Koivisto GEOLOGIAN TUTKIMUSKESKUS Ylätunnisteen lisäteksti Sisällysluettelo
FINNREF- TUKIASEMAVERKKO/PAIKANNUS- PALVELU JA SEN KEHITTÄMINEN
 FINNREF- TUKIASEMAVERKKO/PAIKANNUS- PALVELU JA SEN KEHITTÄMINEN 22.3.2018 Maanmittauspäivät 2018 Marko Ollikainen 1 Esityksen sisältö: - Taustaa - Nyt - Tulevaisuutta FINNREF TUKIASEMAVERKKO JA PAIKANNUSPALVELU
FINNREF- TUKIASEMAVERKKO/PAIKANNUS- PALVELU JA SEN KEHITTÄMINEN 22.3.2018 Maanmittauspäivät 2018 Marko Ollikainen 1 Esityksen sisältö: - Taustaa - Nyt - Tulevaisuutta FINNREF TUKIASEMAVERKKO JA PAIKANNUSPALVELU
GEOLOGIAN TUTKIMUSKESKUKSEN KOORDINAATTIMUUNNOKSET
 GEOLOGIAN TUTKIMUSKESKUKSEN KOORDINAATTIMUUNNOKSET ArcGIS 10.1-paikkatietojärjestelmä Taskila Tuula Opinnäytetyö Tekniikka ja liikenne Maanmittaustekniikan opetusohjelma Insinööri (AMK) 2016 Opinnäytetyön
GEOLOGIAN TUTKIMUSKESKUKSEN KOORDINAATTIMUUNNOKSET ArcGIS 10.1-paikkatietojärjestelmä Taskila Tuula Opinnäytetyö Tekniikka ja liikenne Maanmittaustekniikan opetusohjelma Insinööri (AMK) 2016 Opinnäytetyön
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta
 Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Raidegeometrian geodeettiset mittaukset osana radan elinkaarta Suunnittelija (Maanmittaus DI) 24.1.2018 Raidegeometrian geodeettisen mittaukset osana radan elinkaarta Raidegeometrian geodeettisilla mittauksilla
Koordinaattimuunnospalvelut
 Koordinaattimuunnospalvelut 07.05.2010 Reino Ruotsalainen MAANMITTAUSLAITOS TIETOA MAASTA 2010 Lisätietoja: http://www.fgi.fi/julkaisut/pdf/gltiedote30.pdf Geodeettisen laitoksen tiedote 30/2009: SUOMEN
Koordinaattimuunnospalvelut 07.05.2010 Reino Ruotsalainen MAANMITTAUSLAITOS TIETOA MAASTA 2010 Lisätietoja: http://www.fgi.fi/julkaisut/pdf/gltiedote30.pdf Geodeettisen laitoksen tiedote 30/2009: SUOMEN
MAANMITTAUSLAITOS MÄÄRÄYS 1 (1) Keskushallinto
 Keskushallinto") MAANMITTAUSLAITOS MÄÄRÄYS 1 (1) Keskushallinto 31.1.2003 MML/1/012/2003 KAAVOITUSMITTAUSOHJEET Maanmittauslaitos on tänään antanut maankäyttö- ja rakennuslain (132/1999) 206 :n 3 momentissa tarkoitetut,
MAANMITTAUSLAITOS MÄÄRÄYS 1 (1) Keskushallinto 31.1.2003 MML/1/012/2003 KAAVOITUSMITTAUSOHJEET Maanmittauslaitos on tänään antanut maankäyttö- ja rakennuslain (132/1999) 206 :n 3 momentissa tarkoitetut,
Maanpinnan kallistumien Satakunnassa
 Ennen maan pinnan asettumista lepotilaansa, eri paikkakunnat kohoavat erilaisilla nopeuksilla. Maan kohoaminen ilmeisesti sitä nopeampaa, mitä syvemmällä maan kamara ollut. Pohjanlahden nopea nousu verrattuna
Ennen maan pinnan asettumista lepotilaansa, eri paikkakunnat kohoavat erilaisilla nopeuksilla. Maan kohoaminen ilmeisesti sitä nopeampaa, mitä syvemmällä maan kamara ollut. Pohjanlahden nopea nousu verrattuna
VIRTAIN KAUPUNGIN MUUNNOSVAIHTOEHDOT EUREF-FIN- JA N2000-JÄRJESTELMIIN SIIRTYMISEKSI
 OPINNÄYTETYÖ ANTTI VÄÄTÄINEN 2010 VIRTAIN KAUPUNGIN MUUNNOSVAIHTOEHDOT EUREF-FIN- JA N2000-JÄRJESTELMIIN SIIRTYMISEKSI MAANMITTAUSTEKNIIKKA ROVANIEMEN AMMATTIKORKEAKOULU TEKNIIKAN JA LIIKENTEEN ALA Maanmittaustekniikka
OPINNÄYTETYÖ ANTTI VÄÄTÄINEN 2010 VIRTAIN KAUPUNGIN MUUNNOSVAIHTOEHDOT EUREF-FIN- JA N2000-JÄRJESTELMIIN SIIRTYMISEKSI MAANMITTAUSTEKNIIKKA ROVANIEMEN AMMATTIKORKEAKOULU TEKNIIKAN JA LIIKENTEEN ALA Maanmittaustekniikka
Teoreettisia perusteita II
 Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Julkisen hallinnon suositus JHS 153
 JULKISEN HALLINNON SUOSITUS JHS 153 Versio 2008-06-06 Julkisen hallinnon suositus JHS 153 ETRS89-järjestelmän mukaiset koordinaatit Suomessa Sisällys: Tiivistelmä... 2 1 Johdanto... 3 2 Soveltamisala...
JULKISEN HALLINNON SUOSITUS JHS 153 Versio 2008-06-06 Julkisen hallinnon suositus JHS 153 ETRS89-järjestelmän mukaiset koordinaatit Suomessa Sisällys: Tiivistelmä... 2 1 Johdanto... 3 2 Soveltamisala...
KOORDINAATTI- JA KORKEUS- JÄRJESTELMÄT. Infrasuunnittelijan opas
 KOORDINAATTI- JA KORKEUS- JÄRJESTELMÄT Infrasuunnittelijan opas Petra Brunnila Opinnäytetyö Huhtikuu 2012 Rakennustekniikka Infrarakentaminen TIIVISTELMÄ Tampereen ammattikorkeakoulu Rakennustekniikka
KOORDINAATTI- JA KORKEUS- JÄRJESTELMÄT Infrasuunnittelijan opas Petra Brunnila Opinnäytetyö Huhtikuu 2012 Rakennustekniikka Infrarakentaminen TIIVISTELMÄ Tampereen ammattikorkeakoulu Rakennustekniikka
Kertaus. x x x. K1. a) b) x 5 x 6 = x 5 6 = x 1 = 1 x, x 0. K2. a) a a a a, a > 0
 b) x 5 x 6 = x 5 6 = x 1 = 1 x, x 0. K2. a) a a a a, a > 0") Juuri 8 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 8.9.07 Kertaus K. a) 6 4 64 0, 0 0 0 0 b) 5 6 = 5 6 = =, 0 c) d) K. a) b) c) d) 4 4 4 7 4 ( ) 7 7 7 7 87 56 7 7 7 6 6 a a a, a > 0 6 6 a
Juuri 8 Tehtävien ratkaisut Kustannusosakeyhtiö Otava päivitetty 8.9.07 Kertaus K. a) 6 4 64 0, 0 0 0 0 b) 5 6 = 5 6 = =, 0 c) d) K. a) b) c) d) 4 4 4 7 4 ( ) 7 7 7 7 87 56 7 7 7 6 6 a a a, a > 0 6 6 a
3.3 Paraabeli toisen asteen polynomifunktion kuvaajana. Toisen asteen epäyhtälö
 3.3 Paraabeli toisen asteen polynomifunktion kuvaajana. Toisen asteen epäyhtälö Yhtälön (tai funktion) y = a + b + c, missä a 0, kuvaaja ei ole suora, mutta ei ole yhtälökään ensimmäistä astetta. Funktioiden
3.3 Paraabeli toisen asteen polynomifunktion kuvaajana. Toisen asteen epäyhtälö Yhtälön (tai funktion) y = a + b + c, missä a 0, kuvaaja ei ole suora, mutta ei ole yhtälökään ensimmäistä astetta. Funktioiden
3 TOISEN ASTEEN POLYNOMIFUNKTIO
 3 TOISEN ASTEEN POLYNOMIFUNKTIO POHDITTAVAA 1. Kuvasta voidaan arvioida, että frisbeegolfkiekko käy noin 9 metrin korkeudella ja se lentää noin 40 metrin päähän. Vastaus: Frisbeegolfkiekko käy n. 9 m:n
3 TOISEN ASTEEN POLYNOMIFUNKTIO POHDITTAVAA 1. Kuvasta voidaan arvioida, että frisbeegolfkiekko käy noin 9 metrin korkeudella ja se lentää noin 40 metrin päähän. Vastaus: Frisbeegolfkiekko käy n. 9 m:n
Helsingin kaupunkisuunnitteluviraston yleissuunnitteluosaston selvityksiä 2010:1. Helsingin kaupungin tulvastrategia
 Helsingin kaupunkisuunnitteluviraston yleissuunnitteluosaston selvityksiä 200: Helsingin kaupungin tulvastrategia Tulviin varautuminen Helsingin kaupungissa Joulukuu 2008 Viite: 8220495 Pvm: 9.2.2008
Helsingin kaupunkisuunnitteluviraston yleissuunnitteluosaston selvityksiä 200: Helsingin kaupungin tulvastrategia Tulviin varautuminen Helsingin kaupungissa Joulukuu 2008 Viite: 8220495 Pvm: 9.2.2008
Satamatoiminta ja korkeusjärjestelmät
 Geodesian päivä 10.9.2014 Tieteiden talo, Helsinki Satamatoiminta ja korkeusjärjestelmät Tero Sievänen, Helsingin Satama Satamatoiminta ja korkeusjärjestelmät Tero Sievänen, Helsingin Satama q Helsingin
Geodesian päivä 10.9.2014 Tieteiden talo, Helsinki Satamatoiminta ja korkeusjärjestelmät Tero Sievänen, Helsingin Satama Satamatoiminta ja korkeusjärjestelmät Tero Sievänen, Helsingin Satama q Helsingin
Kojemeteorologia. Sami Haapanala syksy 2013. Fysiikan laitos, Ilmakehätieteiden osasto
 Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Mittalaitteiden staattiset ominaisuudet Mittalaitteita kuvaavat tunnusluvut voidaan jakaa kahteen luokkaan Staattisiin
Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Mittalaitteiden staattiset ominaisuudet Mittalaitteita kuvaavat tunnusluvut voidaan jakaa kahteen luokkaan Staattisiin
Paikkatiedon JHS-seminaari. Paikkatietomarkkinat 2016
 Paikkatiedon JHS-seminaari Paikkatietomarkkinat 2016 Ohjelma 9:00 Tervetuloa JHS-seminaarin Katsaus Paikkatiedon JHS:iin Pekka Sarkola, paikkatiedon JHS ohjausryhmä Paikkatiedot JUHTAn toiminnassa Jari
Paikkatiedon JHS-seminaari Paikkatietomarkkinat 2016 Ohjelma 9:00 Tervetuloa JHS-seminaarin Katsaus Paikkatiedon JHS:iin Pekka Sarkola, paikkatiedon JHS ohjausryhmä Paikkatiedot JUHTAn toiminnassa Jari
Numeeriset menetelmät TIEA381. Luento 6. Kirsi Valjus. Jyväskylän yliopisto. Luento 6 () Numeeriset menetelmät / 33
 Numeeriset menetelmät / 33") Numeeriset menetelmät TIEA381 Luento 6 Kirsi Valjus Jyväskylän yliopisto Luento 6 () Numeeriset menetelmät 4.4.2013 1 / 33 Luennon 6 sisältö Interpolointi ja approksimointi Polynomi-interpolaatio: Vandermonden
Numeeriset menetelmät TIEA381 Luento 6 Kirsi Valjus Jyväskylän yliopisto Luento 6 () Numeeriset menetelmät 4.4.2013 1 / 33 Luennon 6 sisältö Interpolointi ja approksimointi Polynomi-interpolaatio: Vandermonden
Vermeer, Martin Mistä korkeuksissa on kysymys - teoria ja historiaa
 Powered by TCPDF (www.tcpdf.org) This is an electronic reprint of the original article. This reprint may differ from the original in pagination and typographic detail. Vermeer, Martin Mistä korkeuksissa
Powered by TCPDF (www.tcpdf.org) This is an electronic reprint of the original article. This reprint may differ from the original in pagination and typographic detail. Vermeer, Martin Mistä korkeuksissa
FYSIIKAN LABORATORIOTYÖT 2 MAGNEETTIKENTTÄTYÖ
 FYSIIKAN LABORATORIOTYÖT 2 MAGNEETTIKENTTÄTYÖ MIKKO LAINE 2. kesäkuuta 2015 1. Johdanto Tässä työssä määritämme Maan magneettikentän komponentit, laskemme totaalikentän voimakkuuden ja monitoroimme magnetometrin
FYSIIKAN LABORATORIOTYÖT 2 MAGNEETTIKENTTÄTYÖ MIKKO LAINE 2. kesäkuuta 2015 1. Johdanto Tässä työssä määritämme Maan magneettikentän komponentit, laskemme totaalikentän voimakkuuden ja monitoroimme magnetometrin
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako
 JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Versio: 1.1 / 9.12.2016 Julkaistu: 5.4.2016 Voimassaoloaika: toistaiseksi Sisällys 1 Johdanto...2 2 Soveltamisala...3
JHS 197 EUREF-FIN -koordinaattijärjestelmät, niihin liittyvät muunnokset ja karttalehtijako Versio: 1.1 / 9.12.2016 Julkaistu: 5.4.2016 Voimassaoloaika: toistaiseksi Sisällys 1 Johdanto...2 2 Soveltamisala...3
Ympäristödatan keruu ENG-C2001
 01 01 01 01 01 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 Ympäristödatan keruu ENG-C2001 Luento 3: koordinaatistot ja niiden muunnokset, geodeettiset datumit; karttaprojektiot
01 01 01 01 01 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 00 11 Ympäristödatan keruu ENG-C2001 Luento 3: koordinaatistot ja niiden muunnokset, geodeettiset datumit; karttaprojektiot
Tekijä Pitkä matematiikka Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4).
, ( 2,1), (1, 0), (4, 1) ja ( 11, 4).") Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Tekijä Pitkä matematiikka Pisteen (x, y) etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.
 etäisyys pisteestä (0, 2) on ( x 0) Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y.") Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
Tekijä Pitkä matematiikka 5 7..017 37 Pisteen (x, y) etäisyys pisteestä (0, ) on ( x 0) + ( y ). Pisteen (x, y) etäisyys x-akselista, eli suorasta y = 0 on y. Merkitään etäisyydet yhtä suuriksi ja ratkaistaan
INSPIRE Toimeenpanosääntö ja tekninen ohje Muunnospalvelu Koordinaattimuunnospalvelu
 INSPIRE Toimeenpanosääntö ja tekninen ohje Muunnospalvelu Koordinaattimuunnospalvelu Lassi Lehto INSPIRE Network Services DT INSPIRE Network Services DT INSPIRE Network Services DT Finnish Geodetic Institute
INSPIRE Toimeenpanosääntö ja tekninen ohje Muunnospalvelu Koordinaattimuunnospalvelu Lassi Lehto INSPIRE Network Services DT INSPIRE Network Services DT INSPIRE Network Services DT Finnish Geodetic Institute
Tampereen yliopisto Tietokonegrafiikka 2013 Tietojenkäsittelytiede Harjoitus
 Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)
Tampereen yliopisto Tietokonegrafiikka 201 Tietojenkäsittelytiede Harjoitus 6 1..201 1. Tarkastellaan Gouraudin sävytysmallia. Olkoon annettuna kolmio ABC, missä A = (0,0,0), B = (2,0,0) ja C = (1,2,0)