Integrator tulosseminaarin ohjelma
|
|
|
- Anne Lahtinen
- 9 vuotta sitten
- Katselukertoja:
Transkriptio
 Miten Mallia käytetään Haasteet 3: Koneet Työkoneen muuntaminen digitaalisesti ohjattavaksi 4: Arkkitehtuuri ja kommunikointi GIMnet GIMUI demo 5: Koneen automaatioasteen")
1 tulosseminaarin ohjelma 1: Yleisesitys GIM/ yleisesittely Future Worksite idea ja komponentit 2: Mallintaminen ja Suunnittelu Miten työmaa "luodaan"? (3Dmallidemo/video) Miten Mallia käytetään Haasteet 3: Koneet Työkoneen muuntaminen digitaalisesti ohjattavaksi 4: Arkkitehtuuri ja kommunikointi GIMnet GIMUI demo 5: Koneen automaatioasteen nostaminen Paikannus Ohjaus Stereokuva Stereo 3D 6: Demo Kahden koneen ohjaus 7: Entäs sitten??
2 -projekti GIM huippuyksikkö FIMA TEKES
3 Sisältö GIM Mikä se on? Tutkimusalueet -projekti Tavoitteet Future Worksite Tulokset
4 Generic Intelligent Machines, GIM Kahden tunnetun tutkimusyksikön joint venture Automaatiotekniikan laboratorio (ATL), TKK Hydrauliikan ja automatiikan instituutti (IHA), TTY Organisaatiomuutoksen jälkeen: Automaatio- ja systeemitekniikan laitos Älykkään hydrauliikan ja automaation laitos Noin 40 tutkijaa Suomen Akatemian huippuyksikkö kaudelle Käynnistyi illa 2006
5 GIM tutkimus RP 1: Internal Re-evaluation and Education RP 2: Modularity of Generic Machines RP 3: Power and Energy Systems RP 4: Transmission of Power and Data RP 5: Control Architectures (task manager and planning system) RP 6: Perception and Navigation Systems RP 7: Human Robotic Machine Interaction RP 8: Motion systems RP 9: INTEGRATOR project integrate, validate and demonstrate


6 -projekti Perusinfrastruktuuri GIMLocal controls tutkimuksen tueksi GIMin testaus ja demoympäristö tutkimustulosten maintenance exceptions verifiointiin Worksite Tavoitteena Future worksite konsepti Eri tyyppisiä itsenäiseen toimintaan kykeneviä koneita, ihmisiä ja manuaalisesti ohjattuja koneita samalla alueella Täysin hajautettu ohjaus ja valvonta Machines i n t e r n e t Remote control room(s) GIMArchitecture communication common presence databases Operator Model Virtual environment Production management Task design tools Human workers/ local operators
7 in tavoitteet Usean koneen työmaa Tampereella Etävalvontaja -ohjaus Espoossa 180km päässä työmaasta Kommunikointiarkkitehtuuri hajautetulle monikonejärjestelmälle Koneiden etäohjaus, automaattiajo ja niiden vaatimat aputoiminnot Työmaan ja koneiden mallit
8 perusinfra Katettu työmaa + pihaalue Kameroita, Kaksi liukuohjattua Avanttia toiminnassa Runko-ohjattu Avant ja nk. GIM-kone työn alla J2B2 ja WorkPartner GIM-yhteensopiviksi
9 tulosseminaarin ohjelma 1: Yleisesitys GIM/ yleisesittely Future Worksite idea ja komponentit 2: Mallintaminen ja Suunnittelu Miten työmaa "luodaan"? (3Dmallidemo/video) Miten Mallia käytetään Haasteet 3: Koneet Työkoneen muuntaminen digitaalisesti ohjattavaksi 4: Arkkitehtuuri ja kommunikointi GIMnet GIMUI demo 5: Koneen automaatioasteen nostaminen Paikannus Ohjaus Stereokuva Stereo 3D 6: Demo Kahden koneen ohjaus 7: Entäs sitten??
10 Työmaan mallintaminen Miksi mallinnetaan? Mallintaminen Mallin hyväksi käyttäminen
11 Miksi Mallinnetaan? Paikan käsite Manuaaliajo, teleoperointi, (avustava) autonomia Suunnittelu Tehtävän suunnittelu Simulointi Järjestelmäkehitys, opetus Tehtävän simulointi ja optimointi
12 3D-Mallintaminen Video
13 Staattinen 3D-lasermalli Riegel 3D-skanneri Mittausten rekisteröinti, käsin ja ICPalgoritmilla Polygonimallin muodostus Maamallin muodostus
14 Valmis malli Malli toimii koordinaatistona Käyttöliittymä Paikannus Koordinaattiajo Mallilla voidaan simuloida koneen toimintaa työalueella Mallia voidaan käyttää offline suunnitteluun
15 Polunsuunnittelu turvallisimman lyhyimmän polun algoritmi Korkeuskartan gradientti Etäisyysmuunnos kertoo etäisyyden esteisiin Invertoitu (ja lähietäisyydet kynnystetty) kuva on potentiaalikenttä Pienimmän kustannuksen polku

16 Polunsuunnittelu Huomioi koneen muodon ja asennon
17 Simulointi Koneen dynaaminen malli HIL-simulaattori simuloi koneen hydrauliikan, dynamiikan, moottorin, renkaan... mutta elektroniikka on oikeaa Etäkäytetään Simulaattorin hyödyt issa järjestelmäkehityksen tukena Tulevaisuudessa tehtävän suunnittelu, Prediktiivinen malli
18 Simulaattori käytössä Augmentointi, simulaattorin tila esitetään reaalimaailmassa - Teleoperoinnin harjoittelu - Algoritmi kehitys -
19 Tulevaisuuden haasteita Mallin dynaamisuus Työmaa on aina liikkeessä Työtehtävien suunnittelu ja offline simulointi Monirobotti/kone tapaus
20 tulosseminaarin ohjelma 1: Yleisesitys GIM/ yleisesittely Future Worksite idea ja komponentit 2: Mallintaminen ja Suunnittelu Miten työmaa "luodaan"? (3Dmallidemo/video) Miten Mallia käytetään Haasteet 3: Koneet Työkoneen muuntaminen digitaalisesti ohjattavaksi 4: Arkkitehtuuri ja kommunikointi GIMnet GIMUI demo 5: Koneen automaatioasteen nostaminen Paikannus Ohjaus Stereokuva Stereo 3D 6: Demo Kahden koneen ohjaus 7: Entäs sitten??
21 GIMnet
22 INTEGRATOR ohjelmistoprojektina Monikone etäohjausjärjestelmä Reaaliaikaohjaus Skaalautuvuus Tiedonsiirto Fyysinen etäisyys Monimuotoiset verkot Tutkimusympäristö Implementoinnin helppous Innovaation rajoittamattomuus Toiminnallisuus Ratkaisun kestävyys?
23 GIMnet periaate Hajautettu Hybridi järjestelmä VPN-tyyppinen ratkaisu mahdollistaa virtuaaliset p2pyhteydet eri verkkojen välillä Verkkokerros tcphub Aplikaatiokerros NIF and GIMI Toteutus piilotetaan mahdollisimman tehokkaasti ja käyttäjille tarjotaan kirjasto tyyppinen toteutus.
24 Ominaisuuksia Hajautettu nimi/id-palvelu Unicast, Multicast, Broadcast Reaaliaikapakettien pudotusjärjestelmä Synkroninen/asynkroninen datan siirto Automaattinen Hubreconnect, client reconnect Sisäänrakennettu Palvelujärjestelmä Tarjotut ja halutut palvelut Palvelujen rekisteröinti, tilaus ja listaus
25 GIMnet Esimerkki Modulaarisuus ja skaalattavuus Jokainen komponentti voi lähettää/pyytää dataa jokaiselta (äärimmillään, jokainen toimilaite ja anturi voi olla agentti ) Komponentin rajapintana on palvelu(t), joita komponentti tuottaa tai joita se tarvitsee Palvelu ymmärretään järjestelmätasolla määritettynä datatyyppinä, joka on luettavissa järjestelmän kautta Palveluiden rekisteröinti, tilaaminen ja listaus on sisäänrakennettu GIMI:in
26 Testit Paikallisen hubin kautta, aplikaatiotason roundtrip
27 Testit Ethernetin yli roundtrip-aika
28 Testit Throughput
29 GIMUI-Demo
30 Monirobottisimulaattoridemo
31 tulosseminaarin ohjelma 1: Yleisesitys GIM/ yleisesittely Future Worksite idea ja komponentit 2: Mallintaminen ja Suunnittelu Miten työmaa "luodaan"? (3Dmallidemo/video) Miten Mallia käytetään Haasteet 3: Koneet Työkoneen muuntaminen digitaalisesti ohjattavaksi 4: Arkkitehtuuri ja kommunikointi GIMnet GIMUI demo 5: Koneen automaatioasteen nostaminen Paikannus Ohjaus Stereokuva Stereo 3D 6: Demo Kahden koneen ohjaus 7: Entäs sitten??
32 Koneen automaatioasteen nostaminen Koneenohjausarkkitehtuuri Kohti yleistä konerajapintaa Toteutetut modulit Menetelmät koneen sisällä Paikannus Konenäkö
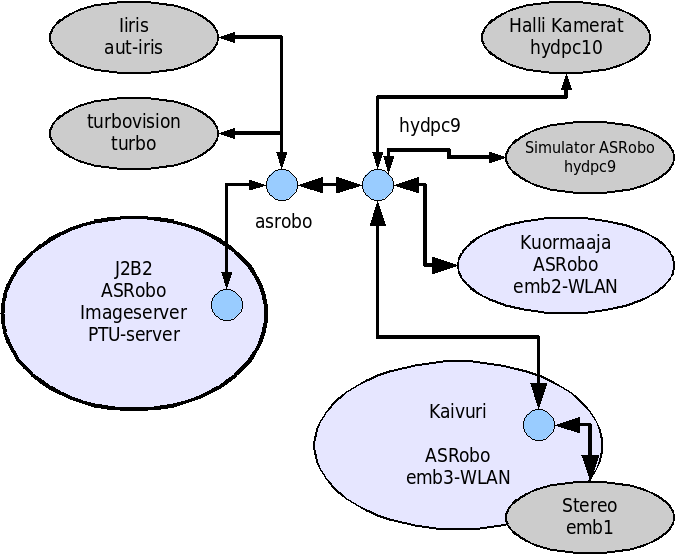
33 Ohjelmistoarkkitehtuuri Hardware AbStraction layer for mobile Robot (ASRobo) Määrittelee abstraktit rajapinnat moduleille aitetistoriippuvaisen alatason päällä kaikki geneeristä GIMnet perustainen tiedonvälitys ulospäin Keskitetty

34 ASRobo moduleja

35 Liikkeenohjausarkkitehtuuri Reaktiivisen ja suunnitelmallisen yhdistelmä Vaikutteita käyttäytymispohjaisesta arkkitehtuurista Osa käytöksistä ihmisen tai plannerin antamia inputteja Eri käyttäytymisiä voidaan kytkeä päälle/pois
36 Paikkasäätölohkokaavio

37 Paikannus Paikannus on välttämätöntä, jos halutaan nostaa automaatioastetta
38 Laserpaikannus Laser tarjoaa tarkan ympäristömittauksen, jota voidaan käyttää paikannuksessa Laser odometria, karttapohjainen paikannus, SLAM Ongelmat: Heiluminen aiheuttaa virhettä Mittauksia maasta, etäisyys virhe

39 Laser odometria Histogrammipohjainen kulmaestimointi Korrelaatiopohjainen paikkaestimointi löydetyille kulmille
40 Monte Carlo Paikannus Partikkelisuodin menetelmä Laserodometriaa käytetään pilven liikkeen ennustamisessa Päivitys lasketaan vertaamalla odotettavaa näkymää ja mitattua näkymää ~ likelihood Pilven päivitys SIR menetelmällä
41 Paikannustulos Laser odometry MCL
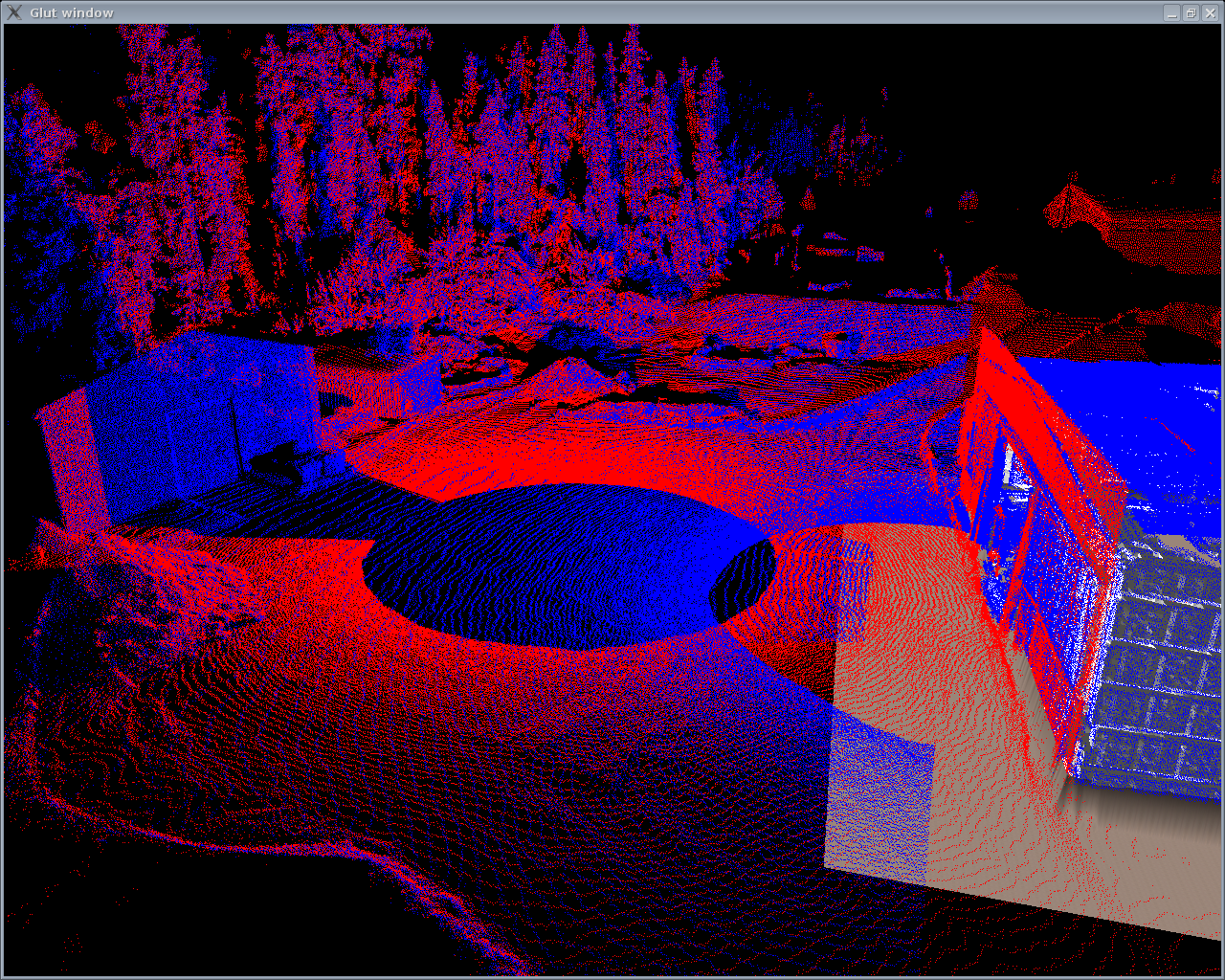
42 Stereokamerat
43 Stereokamerajärjestelmä Kahden kameran avulla pystytään Välittämään käyttäjälle kolmiulotteinen vaikutelma kameroiden näkymästä Mittaamaan kolmiulotteinen malli kameroiden edessä olevasta alueesta
44 Etäkäyttö stereokuvan avulla Vasemman ja oikean kameran kuva liitetään päällekkäin eri värisinä Kaksivärilaseilla silmät näkevät eri kameroiden kuvat Katsojalle muodostuu kolmiulotteinen vaikutelma Etäisyyksien arvioiminen helpottuu
45 Etäkäyttö stereokuvan avulla Kamerat eivät ole yhdensuuntaiset Kuvat ovat vääristyneet Kameroiden kuvat sellaisenaan eivät saisi aikaan kolmiulotteista vaikutelmaa Kuvien suoristaminen korjaa asian
46 Etäkäyttö stereokuvan avulla Alkuperäinen stereokuvapari
47 Etäkäyttö stereokuvan avulla Suoristettu stereokuvapari
48 Etäkäyttö stereokuvan avulla Suoristamaton Suoristettu
49 Kolmiulotteisen mallin muodostaminen Kuvista etsitään samalta näyttävät pisteet Kameroiden keskinäinen geometria tunnetaan Kunkin pisteen paikka kolmiulotteisessa avaruudessa pystytään laskemaan
50 Kolmiulotteisen mallin muodostaminen Mallin laskenta on raskasta Tehokas algoritmi on tärkeä Kaikki samannäköiset kohdat eivät oikeasti kuvaa samaa avaruuden pistettä Malliin jää väkisin epätodellisia pisteitä
51 Kolmiulotteisen mallin muodostaminen Mallin muodostamisen vaiheet 1) Vastinpisteiden etsintä etäisyyskartta 2) Kolmiulotteisen mallin laskenta etäisyyskartan avulla 3) Mallin kääntäminen siten, että maanpinta on vaakasuorassa 4) Korkeuskartan muodostaminen
52 Kolmiulotteisen mallin muodostaminen
53 Kolmiulotteisen mallin muodostaminen Vastinpisteiden etsintä etäisyyskartta
54 Kolmiulotteisen mallin muodostaminen Kolmiulotteisen mallin laskenta
55 Kolmiulotteisen mallin muodostaminen Maanpinta vaakasuoraan ja korkeuskartan muodostaminen
56 tulosseminaarin ohjelma 1: Yleisesitys GIM/ yleisesittely Future Worksite idea ja komponentit 2: Mallintaminen ja Suunnittelu Miten työmaa "luodaan"? (3Dmallidemo/video) Miten Mallia käytetään Haasteet 3: Koneet Työkoneen muuntaminen digitaalisesti ohjattavaksi 4: Arkkitehtuuri ja kommunikointi GIMnet GIMUI demo 5: Koneen automaatioasteen nostaminen Paikannus Ohjaus Stereokuva Stereo 3D 6: Demo Kahden koneen ohjaus 7: Entäs sitten??
57 Kohti autonomista työkonetta Paljon on vielä tehtävää ennenkuin (nämä) työkoneet toimivat autonomisesti Paikannuksen parantaminen Muita menetelmiä, lisäanturointi, lisätyötä Työalueen laajentaminen hallin ulkopuolelle Paikkasäädön parantaminen (paikannus auttaa) Työtehtävien (kaivaminen, kuljettaminen,...) automatisoiminen Koneenohjausarkkitehtuurin viimeistely
58 Kohti autonomista työmaata Työtehtävien suunnittelu Työtehtävien off-line optimointi Monikone järjestelmän haasteet Järjestelmäarkkitehtuuri Resurssien jako ja optimointi Ihmisen läsnäolo työmaalla Ihminen-työkone-vuorovaikutus Dynaamisen työmaan mallintaminen
Älykkäiden koneiden huippuyksikkö. Mika Vainio vanhempi tutkija, dosentti GIM / Automaatiotekniikan labra / TKK
 Älykkäiden koneiden huippuyksikkö Mika Vainio vanhempi tutkija, dosentti GIM / Automaatiotekniikan labra / TKK ESITELMÄN SISÄLTÖ Keitä olemme? Mitä tutkimme? Miten tutkimme? Miten liitymme ympäröivään
Älykkäiden koneiden huippuyksikkö Mika Vainio vanhempi tutkija, dosentti GIM / Automaatiotekniikan labra / TKK ESITELMÄN SISÄLTÖ Keitä olemme? Mitä tutkimme? Miten tutkimme? Miten liitymme ympäröivään
Autonomisen liikkuvan koneen teknologiat. Hannu Mäkelä Navitec Systems Oy
 Autonomisen liikkuvan koneen teknologiat Hannu Mäkelä Navitec Systems Oy Autonomisuuden edellytykset itsenäinen toiminta ympäristön havainnointi ja mittaus liikkuminen ja paikannus toiminta mittausten
Autonomisen liikkuvan koneen teknologiat Hannu Mäkelä Navitec Systems Oy Autonomisuuden edellytykset itsenäinen toiminta ympäristön havainnointi ja mittaus liikkuminen ja paikannus toiminta mittausten
Drifterit, gliderit ja monirobottijärjestelmät SWARM ja DAMOCLES EU-projekteissa
 ja monirobottijärjestelmät SWARM ja DAMOCLES EU-projekteissa, GIM / TKK Email: mika.vainio@tkk.fi Lähde: www.argo.ucsd.edu Esityksen sisältö Alustus Määrittelyt EU-projektien kuvaukset Tulevaisuuden skenaariot
ja monirobottijärjestelmät SWARM ja DAMOCLES EU-projekteissa, GIM / TKK Email: mika.vainio@tkk.fi Lähde: www.argo.ucsd.edu Esityksen sisältö Alustus Määrittelyt EU-projektien kuvaukset Tulevaisuuden skenaariot
AS Automaatio ja systeemitekniikan projektityöt A13 10 Radio ohjattavan pienoismallin ohjausjärjestelmän ja käyttöliittymän kehittäminen
 Väliraportti AS 0.3200 Automaatio ja systeemitekniikan projektityöt A13 10 Radio ohjattavan pienoismallin ohjausjärjestelmän ja käyttöliittymän kehittäminen Toni Liski, Konsta Hölttä, Lasse Kortetjärvi
Väliraportti AS 0.3200 Automaatio ja systeemitekniikan projektityöt A13 10 Radio ohjattavan pienoismallin ohjausjärjestelmän ja käyttöliittymän kehittäminen Toni Liski, Konsta Hölttä, Lasse Kortetjärvi
Stereopaikannusjärjestelmän tarkkuus (3 op)
") Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Metsäkoneiden sensoritekniikka kehittyy. Heikki Hyyti, Aalto-yliopisto
 Metsäkoneiden sensoritekniikka kehittyy, Metsäkoneiden sensoritekniikka kehittyy Miksi uutta sensoritekniikkaa? Tarkka paikkatieto metsässä Metsäkoneen ja puomin asennon mittaus Konenäkö Laserkeilaus Tietolähteiden
Metsäkoneiden sensoritekniikka kehittyy, Metsäkoneiden sensoritekniikka kehittyy Miksi uutta sensoritekniikkaa? Tarkka paikkatieto metsässä Metsäkoneen ja puomin asennon mittaus Konenäkö Laserkeilaus Tietolähteiden
liiketoimintamahdollisuuksia Automaatiolla tuottavuutta ja koneenrakennukseen ELKOM 07 ECT Forum FIMA pääsihteeri Antti Sirén Governed by
 ELKOM 07 ECT Forum 6.9.2007 Antti Sirén FIMA pääsihteeri Automaatiolla tuottavuutta ja liiketoimintamahdollisuuksia koneenrakennukseen Miksi lisää automaatiota työkoneisiin? Automaation hyödyt asiakkaalle
ELKOM 07 ECT Forum 6.9.2007 Antti Sirén FIMA pääsihteeri Automaatiolla tuottavuutta ja liiketoimintamahdollisuuksia koneenrakennukseen Miksi lisää automaatiota työkoneisiin? Automaation hyödyt asiakkaalle
Nopeutettu Elinkaaren Määritys. TEKES tutkimusprojekti
 Nopeutettu Elinkaaren Määritys Accelerated Life Cycle Estimation NEM -projekti TEKES tutkimusprojekti Elinkeinoelämän kanssa verkottunut julkinen tutkimus 2014 2017 Juha Miettinen, Materiaaliopin laboratorio,
Nopeutettu Elinkaaren Määritys Accelerated Life Cycle Estimation NEM -projekti TEKES tutkimusprojekti Elinkeinoelämän kanssa verkottunut julkinen tutkimus 2014 2017 Juha Miettinen, Materiaaliopin laboratorio,
Verkottunut suunnittelu
 Rintekno Oy / JMM / 10.1.2002 Verkottunut suunnittelu DOKUMENTTI- POHJAINEN Tarkastus ja hyväksyntä Automaattinen dokumenttien luonti MALLIPOHJAINEN 2D:SSÄ JA 3D:SSÄ Tarkastus ja hyväksyntä Virtuaaliset
Rintekno Oy / JMM / 10.1.2002 Verkottunut suunnittelu DOKUMENTTI- POHJAINEN Tarkastus ja hyväksyntä Automaattinen dokumenttien luonti MALLIPOHJAINEN 2D:SSÄ JA 3D:SSÄ Tarkastus ja hyväksyntä Virtuaaliset
Laaja-alainen, opiskelijalähtöinen ja projektiperusteinen opetussuunnitelma, case Monitori
 Laaja-alainen, opiskelijalähtöinen ja projektiperusteinen opetussuunnitelma, case Monitori Insinöörikoulutuksen Foorumi 2012 Seminaariesitelmä Timo Turunen ja Matti Welin Monitori koulutusalarajat ylittävä
Laaja-alainen, opiskelijalähtöinen ja projektiperusteinen opetussuunnitelma, case Monitori Insinöörikoulutuksen Foorumi 2012 Seminaariesitelmä Timo Turunen ja Matti Welin Monitori koulutusalarajat ylittävä
SÄÄTÖJÄRJESTELMIEN SUUNNITTELU
 ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / Systeemitekniikka Jan 2019
ENSO IKONEN PYOSYS 1 SÄÄTÖJÄRJESTELMIEN SUUNNITTELU Enso Ikonen professori säätö- ja systeemitekniikka http://cc.oulu.fi/~iko Oulun yliopisto Älykkäät koneet ja järjestelmät / Systeemitekniikka Jan 2019
1. STEREOKUVAPARIN OTTAMINEN ANAGLYFIKUVIA VARTEN. Hyvien stereokuvien ottaminen edellyttää kahden perusasian ymmärtämistä.
 3-D ANAGLYFIKUVIEN TUOTTAMINEN Fotogrammetrian ja kaukokartoituksen laboratorio Teknillinen korkeakoulu Petri Rönnholm Perustyövaiheet: A. Ota stereokuvapari B. Poista vasemmasta kuvasta vihreä ja sininen
3-D ANAGLYFIKUVIEN TUOTTAMINEN Fotogrammetrian ja kaukokartoituksen laboratorio Teknillinen korkeakoulu Petri Rönnholm Perustyövaiheet: A. Ota stereokuvapari B. Poista vasemmasta kuvasta vihreä ja sininen
Divar. Käyttökohdeopas. Divar application guide
 Divar Käyttökohdeopas Bosch Divar application Divar Digitaalitallennin guide Bosch Divar Digitaalitallennin Divar on digitaalitallennin, joka tuo digitaalisen CCTV-valvontatekniikan entistä laajemman käyttäjäryhmän
Divar Käyttökohdeopas Bosch Divar application Divar Digitaalitallennin guide Bosch Divar Digitaalitallennin Divar on digitaalitallennin, joka tuo digitaalisen CCTV-valvontatekniikan entistä laajemman käyttäjäryhmän
Koneet ilman kuljettajia? Autonomisten ja semi-autonomisten työkoneiden tulevaisuus maanrakennuksessa
 TEKNOLOGIAN TUTKIMUSKESKUS VTT OY Koneet ilman kuljettajia? Autonomisten ja semi-autonomisten työkoneiden tulevaisuus maanrakennuksessa Kiviainespäivät 19.1.2018 Mika Haapalainen, Projektipäällikkö Agenda
TEKNOLOGIAN TUTKIMUSKESKUS VTT OY Koneet ilman kuljettajia? Autonomisten ja semi-autonomisten työkoneiden tulevaisuus maanrakennuksessa Kiviainespäivät 19.1.2018 Mika Haapalainen, Projektipäällikkö Agenda
Automaatio ja robotiikka arjessa
 Automaatio ja robotiikka arjessa Jari Saarinen Aalto yliopisto, sähkötekniikan korkeakoulu Automaatio ja systeemitekniikan laitos Geneeristen älykkäiden koneiden huippuyksikkö Aalto University, based on
Automaatio ja robotiikka arjessa Jari Saarinen Aalto yliopisto, sähkötekniikan korkeakoulu Automaatio ja systeemitekniikan laitos Geneeristen älykkäiden koneiden huippuyksikkö Aalto University, based on
Mekatroniikan tutkimusverkoston kehittäminen Raumalla, METURA
 3.12.2015 1 Mekatroniikan tutkimusverkoston kehittäminen Raumalla, METURA 2 3 Mekatroniikka? Mekatroniikka tulee sanoista mekaniikka ja elektroniikka. Mekatroniikka termi keksittiin Japanissa 1970-luvulla,
3.12.2015 1 Mekatroniikan tutkimusverkoston kehittäminen Raumalla, METURA 2 3 Mekatroniikka? Mekatroniikka tulee sanoista mekaniikka ja elektroniikka. Mekatroniikka termi keksittiin Japanissa 1970-luvulla,
GA & robot path planning. Janne Haapsaari AUTO Geneettiset algoritmit
 GA & robot path planning Janne Haapsaari AUTO3070 - Geneettiset algoritmit GA robotiikassa Sovelluksia liikkeen optimoinnissa: * eri vapausasteisten robottien liikeratojen optimointi * autonomisten robottien
GA & robot path planning Janne Haapsaari AUTO3070 - Geneettiset algoritmit GA robotiikassa Sovelluksia liikkeen optimoinnissa: * eri vapausasteisten robottien liikeratojen optimointi * autonomisten robottien
Pertti Pennanen DOKUMENTTI 1 (5) EDUPOLI ICTPro1 29.10.2013
 EDUPOLI ICTPro1 29.10.2013") Virtualisointi Pertti Pennanen DOKUMENTTI 1 (5) SISÄLLYSLUETTELO Virtualisointi... 2 Virtualisointiohjelmia... 2 Virtualisointitapoja... 2 Verkkovirtualisointi... 2 Pertti Pennanen DOKUMENTTI 2 (5) Virtualisointi
Virtualisointi Pertti Pennanen DOKUMENTTI 1 (5) SISÄLLYSLUETTELO Virtualisointi... 2 Virtualisointiohjelmia... 2 Virtualisointitapoja... 2 Verkkovirtualisointi... 2 Pertti Pennanen DOKUMENTTI 2 (5) Virtualisointi
Liikenteen hankeaihioita
 Hermia Oy Tamlink Oy Liikenteen hankeaihioita Hannu Hakala Artemis Call 2011 - työpaja Artemis haluaa the design, development and deployment of ubiquitous, interoperable and cost-effective, powerful, safe
Hermia Oy Tamlink Oy Liikenteen hankeaihioita Hannu Hakala Artemis Call 2011 - työpaja Artemis haluaa the design, development and deployment of ubiquitous, interoperable and cost-effective, powerful, safe
Tosi elävä virtuaalimalli Mika Karaila Tutkimuspäällikkö Valmet Automation
 Tosi elävä virtuaalimalli 27.4.2017 Mika Karaila Tutkimuspäällikkö Valmet Automation Agenda Teollinen internet Uudet teknologiat: VR & MR Soveltaminen käytännössä Yhteenveto & demo 2 Teollinen internet
Tosi elävä virtuaalimalli 27.4.2017 Mika Karaila Tutkimuspäällikkö Valmet Automation Agenda Teollinen internet Uudet teknologiat: VR & MR Soveltaminen käytännössä Yhteenveto & demo 2 Teollinen internet
DIGITRAFFIC - Yleisesittely
 DIGITRAFFIC - Yleisesittely DIGITRAFFIC Työpaja 3.9.2002, 12.30 16.00 Liikenne- ja viestintäministeriö MIKÄ ON DIGITRAFFIC? Digitaalinen liikenteen tietomalli, virtuaali liikenne Laskennallinen kokonaiskuva
DIGITRAFFIC - Yleisesittely DIGITRAFFIC Työpaja 3.9.2002, 12.30 16.00 Liikenne- ja viestintäministeriö MIKÄ ON DIGITRAFFIC? Digitaalinen liikenteen tietomalli, virtuaali liikenne Laskennallinen kokonaiskuva
Tiedonkeruun miljoonat pisteet
 Tiedonkeruun miljoonat pisteet Arttu Julin, Rakennetun ympäristön mittauksen ja mallinnuksen instituutti, Aalto-yliopisto. arttu.julin@aalto.fi Kaupunkimallit 2017 seminaari 8.11.2017 Rakennetun ympäristön
Tiedonkeruun miljoonat pisteet Arttu Julin, Rakennetun ympäristön mittauksen ja mallinnuksen instituutti, Aalto-yliopisto. arttu.julin@aalto.fi Kaupunkimallit 2017 seminaari 8.11.2017 Rakennetun ympäristön
Luento 3: 3D katselu. Sisältö
 Tietokonegrafiikan perusteet T-.43 3 op Luento 3: 3D katselu Lauri Savioja Janne Kontkanen /27 3D katselu / Sisältö Kertaus: koordinaattimuunnokset ja homogeeniset koordinaatit Näkymänmuodostus Kameran
Tietokonegrafiikan perusteet T-.43 3 op Luento 3: 3D katselu Lauri Savioja Janne Kontkanen /27 3D katselu / Sisältö Kertaus: koordinaattimuunnokset ja homogeeniset koordinaatit Näkymänmuodostus Kameran
Ohjelmistoarkkitehtuuriin vaikuttavia tekijöitä. Kari Suihkonen
 Ohjelmistoarkkitehtuuriin vaikuttavia tekijöitä Kari Suihkonen Ohjelmistoarkkitehtuuriin vaikuttavia tekijöitä Tuote Ohjelmisto Ulkoiset tekijät Sisäiset tekijät 2 Hissin ohjausjärjestelmä ohjelmistotuotteena
Ohjelmistoarkkitehtuuriin vaikuttavia tekijöitä Kari Suihkonen Ohjelmistoarkkitehtuuriin vaikuttavia tekijöitä Tuote Ohjelmisto Ulkoiset tekijät Sisäiset tekijät 2 Hissin ohjausjärjestelmä ohjelmistotuotteena
Pikaohje LandNova simulaattorin käyttöön(tarkemmat ohjeet käyttöohjeessa ja mallinnusohjeessa):
:") Pikaohje -simulaattorin käyttöön(tarkemmat ohjeet käyttöohjeessa ja mallinnusohjeessa): 14.1 -simulaattori ei ole täysin yhteensopiva version 14.0 kanssa, tässä toimii mm. vgp-linjat, SBG-Geon formaatit
Pikaohje -simulaattorin käyttöön(tarkemmat ohjeet käyttöohjeessa ja mallinnusohjeessa): 14.1 -simulaattori ei ole täysin yhteensopiva version 14.0 kanssa, tässä toimii mm. vgp-linjat, SBG-Geon formaatit
Älykäs Automaatio ja Teollinen Internet (ÄLLI-projekti) Ilkka Kivelä Kokkolan yliopistokeskus Chydenius
 Ilkka Kivelä Kokkolan yliopistokeskus Chydenius") Älykäs Automaatio ja Teollinen Internet (ÄLLI-projekti) Ilkka Kivelä Kokkolan yliopistokeskus Chydenius 26.10.2016 IT-yksikkö tutkimus Informaatioteknologian yksikön tutkimus on keskittynyt IoT-teknologioihin
Älykäs Automaatio ja Teollinen Internet (ÄLLI-projekti) Ilkka Kivelä Kokkolan yliopistokeskus Chydenius 26.10.2016 IT-yksikkö tutkimus Informaatioteknologian yksikön tutkimus on keskittynyt IoT-teknologioihin
S11-09 Control System for an. Autonomous Household Robot Platform
 S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
Malleja ja menetelmiä geometriseen tietokonenäköön
 Malleja ja menetelmiä geometriseen tietokonenäköön Juho Kannala 7.5.2010 Johdanto Tietokonenäkö on ala, joka kehittää menetelmiä automaattiseen kuvien sisällön tulkintaan Tietokonenäkö on ajankohtainen
Malleja ja menetelmiä geometriseen tietokonenäköön Juho Kannala 7.5.2010 Johdanto Tietokonenäkö on ala, joka kehittää menetelmiä automaattiseen kuvien sisällön tulkintaan Tietokonenäkö on ajankohtainen
Agenda. Johdanto Ominaispiirteitä Kokonaisjärjestelmän määrittely Eri alojen edustajien roolit Sulautetut järjestelmät ja sulautettu ohjelmointi
 1. Luento: Sulautetut Järjestelmät Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Ominaispiirteitä Kokonaisjärjestelmän määrittely Eri alojen edustajien roolit Sulautetut järjestelmät ja sulautettu
1. Luento: Sulautetut Järjestelmät Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Ominaispiirteitä Kokonaisjärjestelmän määrittely Eri alojen edustajien roolit Sulautetut järjestelmät ja sulautettu
Millainen on menestyvä digitaalinen palvelu?
 Millainen on menestyvä digitaalinen palvelu? TOIMIVA ÄLYKÄS ILAHDUTTAVA Ohjelmistokehitys Testaus ja laadunvarmistus Ohjelmistorobotiikka Tekoäly Käyttöliittymäsuunnittelu Käyttäjäkokemussuunnittelu 1
Millainen on menestyvä digitaalinen palvelu? TOIMIVA ÄLYKÄS ILAHDUTTAVA Ohjelmistokehitys Testaus ja laadunvarmistus Ohjelmistorobotiikka Tekoäly Käyttöliittymäsuunnittelu Käyttäjäkokemussuunnittelu 1
Koneenrakennuksen ja talonrakennuksen digitaalisten tuoteprosessien vertailu. Seminaariesitelmä 30.3.2011, Tampere
 Koneenrakennuksen ja talonrakennuksen digitaalisten tuoteprosessien vertailu Seminaariesitelmä 30.3.2011, Tampere WinWind Oy Normet Oy Tuotteita joiden suunnittelussa hyödynnetään digitaalista tuoteprosessia
Koneenrakennuksen ja talonrakennuksen digitaalisten tuoteprosessien vertailu Seminaariesitelmä 30.3.2011, Tampere WinWind Oy Normet Oy Tuotteita joiden suunnittelussa hyödynnetään digitaalista tuoteprosessia
Sähkönjakeluverkon hallinnan arkkitehtuuri. Sami Repo
 Sähkönjakeluverkon hallinnan arkkitehtuuri Sami Repo Miksi? Energiansäästö Muut lämmitysmuodot korvautuvat lämpöpumpuilla Nollaenergiarakentaminen (ZEB) Sähköautot Lämmityskuormien ohjaaminen hinnan perusteella
Sähkönjakeluverkon hallinnan arkkitehtuuri Sami Repo Miksi? Energiansäästö Muut lämmitysmuodot korvautuvat lämpöpumpuilla Nollaenergiarakentaminen (ZEB) Sähköautot Lämmityskuormien ohjaaminen hinnan perusteella
AS Automaation käyttöliittymät L Opetussuunnitelma
 Automaation käyttöliittymät L Opetussuunnitelma Kevät 2008 Perustiedot Opintopistemäärä Luentojen ja harjoitustyön ohjaustilaisuuksien määrä /suorittaminen: Opettajat 3op 6 + 4 4. Periodi TkT (Luennot)
Automaation käyttöliittymät L Opetussuunnitelma Kevät 2008 Perustiedot Opintopistemäärä Luentojen ja harjoitustyön ohjaustilaisuuksien määrä /suorittaminen: Opettajat 3op 6 + 4 4. Periodi TkT (Luennot)
The administrative process of a cluster. Santtu Rantanen Valvoja: Prof. Jorma Jormakka
 The administrative process of a cluster Santtu Rantanen Valvoja: Prof. Jorma Jormakka Sisällysluettelo Johdanto Yleistä HA klustereista Tietoturva klustereissa Hallintaprosessi Johtopäätökset Johdanto
The administrative process of a cluster Santtu Rantanen Valvoja: Prof. Jorma Jormakka Sisällysluettelo Johdanto Yleistä HA klustereista Tietoturva klustereissa Hallintaprosessi Johtopäätökset Johdanto
Robottialustan instrumentointi ja käyttöönotto
 Niilo Heinonen Hannu Häyrinen Matias Katajamäki Tuomas Pylvänen Robottialustan instrumentointi ja käyttöönotto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt 1. Projektin tavoite Projektin puitteissa
Niilo Heinonen Hannu Häyrinen Matias Katajamäki Tuomas Pylvänen Robottialustan instrumentointi ja käyttöönotto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt 1. Projektin tavoite Projektin puitteissa
S11-04 Kompaktikamerat stereokamerajärjestelmässä. Projektisuunnitelma
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Projektisuunnitelma Ari-Matti Reinsalo Anssi Niemi 28.1.2011 Projektityön tavoite Projektityössä
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Projektisuunnitelma Ari-Matti Reinsalo Anssi Niemi 28.1.2011 Projektityön tavoite Projektityössä
EKSOTE Sähköisen asioinnin seminaari 14.10.2014
 EKSOTE Sähköisen asioinnin seminaari 14.10.2014 Sähköisen asioinnin mahdollisuudet tulevaisuudessa Sami Säisä Mitä on sähköinen asiointi? Sähköinen Internetissä toimivaa palvelua? Itsepalveluna toteutettavaa
EKSOTE Sähköisen asioinnin seminaari 14.10.2014 Sähköisen asioinnin mahdollisuudet tulevaisuudessa Sami Säisä Mitä on sähköinen asiointi? Sähköinen Internetissä toimivaa palvelua? Itsepalveluna toteutettavaa
tulevaisuuden teknologiaratkaisut machine kasvinviljelyssä efficient machines Assisting and adaptive agricultural
 Traktorinoukinvaunuyhdistelmä EFFIMA Energy and life cycle cost ja efficient machines tulevaisuuden teknologiaratkaisut Assisting and adaptive agricultural machine kasvinviljelyssä AGROMASSI Antti Suokannas
Traktorinoukinvaunuyhdistelmä EFFIMA Energy and life cycle cost ja efficient machines tulevaisuuden teknologiaratkaisut Assisting and adaptive agricultural machine kasvinviljelyssä AGROMASSI Antti Suokannas
Protect-DG Kohti uusia tekniikoita vikatilanteiden ja hajautetun tuotannon hallinnassa
 Kohti uusia tekniikoita vikatilanteiden ja hajautetun tuotannon hallinnassa ST-POOLIN TUTKIMUSSEMINAARI 4.2.2016 Kimmo Kauhaniemi, Vaasan yliopisto Sisältö Hankkeen yleisesittely Ensimmäisiä alustavia
Kohti uusia tekniikoita vikatilanteiden ja hajautetun tuotannon hallinnassa ST-POOLIN TUTKIMUSSEMINAARI 4.2.2016 Kimmo Kauhaniemi, Vaasan yliopisto Sisältö Hankkeen yleisesittely Ensimmäisiä alustavia
Yrityksen informaatio- ja toimintoprosessien optimointi
 Yrityksen informaatio- ja toimintoprosessien optimointi V-S Teknologiateollisuus ry vaalikokous 10.11.2008 Thomas Westerholm Åbo Akademi PBI Research Institute Teknologisen kehityksen taustalla Copyright
Yrityksen informaatio- ja toimintoprosessien optimointi V-S Teknologiateollisuus ry vaalikokous 10.11.2008 Thomas Westerholm Åbo Akademi PBI Research Institute Teknologisen kehityksen taustalla Copyright
Rakennesuunnittelu digitalisaation aikakaudella. Mikko Malaska Professori Rakennustekniikan laitos
 Rakennesuunnittelu digitalisaation aikakaudella Mikko Malaska Professori Rakennustekniikan laitos Mikko Malaska DI 1996, TkT 2001, Chartered Structural Engineer (CEng) 2004 1.8.2015 Professori, Rakenteiden
Rakennesuunnittelu digitalisaation aikakaudella Mikko Malaska Professori Rakennustekniikan laitos Mikko Malaska DI 1996, TkT 2001, Chartered Structural Engineer (CEng) 2004 1.8.2015 Professori, Rakenteiden
Älykäs erikoistuminen. Kristiina Heiniemi-Pulkkinen
 Älykäs erikoistuminen Kristiina Heiniemi-Pulkkinen 9.6.2015 Miksi? Perimmäisenä ajatuksena on EU rahoituksesta saatavan hyödyn kasvattaminen; kullakin alueella on omat vahvuutensa ja päällekkäisen työn
Älykäs erikoistuminen Kristiina Heiniemi-Pulkkinen 9.6.2015 Miksi? Perimmäisenä ajatuksena on EU rahoituksesta saatavan hyödyn kasvattaminen; kullakin alueella on omat vahvuutensa ja päällekkäisen työn
IMPACT 4.01.10 7.9.2015. 64/Kuvaus, Rakenne ja toiminta//volvon dynaaminen ohjaus, toimintakuvaus
 Tulostanut:Pekka Vuorivirta Palvelu Alustatunnus Polku 64/Kuvaus, Rakenne ja toiminta//volvon dynaaminen ohjaus, toimintakuvaus Malli Tunniste FH (4) 132355236 Julkaisupäivämäärä 29.11.2013 Tunnus/Käyttö
Tulostanut:Pekka Vuorivirta Palvelu Alustatunnus Polku 64/Kuvaus, Rakenne ja toiminta//volvon dynaaminen ohjaus, toimintakuvaus Malli Tunniste FH (4) 132355236 Julkaisupäivämäärä 29.11.2013 Tunnus/Käyttö
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Pv Pvm Aika Kurssin koodi ja nimi Sali Tentti/Vk Viikko
 Pv Pvm Aika Kurssin koodi ja nimi Sali Tentti/Vk Viikko Ma 02.09.13 16:00-19:00 ELEC-A7200 Signaalit ja järjestelmät 4/S1 A102 T02 36 Mon 02.09.13 16:00-19:00 S-104.3310 Optoelectronics 4/S1 A102 T2 36
Pv Pvm Aika Kurssin koodi ja nimi Sali Tentti/Vk Viikko Ma 02.09.13 16:00-19:00 ELEC-A7200 Signaalit ja järjestelmät 4/S1 A102 T02 36 Mon 02.09.13 16:00-19:00 S-104.3310 Optoelectronics 4/S1 A102 T2 36
Ympäristöystävälliset
 Ympäristöystävälliset tulevaisuuden työkoneet Vesihydrauliset mobilekoneet ja niiden älykäs kunnonvalvonta Water hydraulic mobile machines with intelligent condition control Suomen Akatemian tutkimusohjelma,
Ympäristöystävälliset tulevaisuuden työkoneet Vesihydrauliset mobilekoneet ja niiden älykäs kunnonvalvonta Water hydraulic mobile machines with intelligent condition control Suomen Akatemian tutkimusohjelma,
Luento 2 Stereokuvan laskeminen. 2008 Maa-57.1030 Fotogrammetrian perusteet 1
 Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 2 Stereokuvan laskeminen 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Aiheet Stereokuvan laskeminen stereokuvan piirto synteettisen stereokuvaparin tuottaminen laskemalla stereoelokuva kollineaarisuusyhtälöt
Luento 6 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Puuta koskettamaton hakkuukonemittaus. Arto Visala, Matti Öhman, Mikko Miettinen Aalto-Yliopisto (TKK), Automaatio- ja systeemitekniikan laitos
, Automaatio- ja systeemitekniikan laitos") Puuta koskettamaton hakkuukonemittaus Arto Visala, Matti Öhman, Mikko Miettinen Aalto-Yliopisto (TKK), Automaatio- ja systeemitekniikan laitos Forestrix - Metsäkoneen aistinjärjestelmä (2005-2008) Konsortio
Puuta koskettamaton hakkuukonemittaus Arto Visala, Matti Öhman, Mikko Miettinen Aalto-Yliopisto (TKK), Automaatio- ja systeemitekniikan laitos Forestrix - Metsäkoneen aistinjärjestelmä (2005-2008) Konsortio
Merkittävä energiansäästö & Mukavan huoleton ja turvallinen asuminen. - Älykäs, hallittu talotekniikka -
 Merkittävä energiansäästö & Mukavan huoleton ja turvallinen asuminen - Älykäs, hallittu talotekniikka - Agenda Mistä on kyse? Hyödyt Älykäs talotekniikan ohjaus käytännössä Miksi HomeSoft? Tekninen ratkaisu
Merkittävä energiansäästö & Mukavan huoleton ja turvallinen asuminen - Älykäs, hallittu talotekniikka - Agenda Mistä on kyse? Hyödyt Älykäs talotekniikan ohjaus käytännössä Miksi HomeSoft? Tekninen ratkaisu
Liikennetutkimuksen osaaminen Suomessa Oulun yliopisto
 Virtuaalinen liikenteen tutkimuskeskus 16.2.2012 BANK, Unioninkatu 20, Helsinki Liikennetutkimuksen osaaminen Suomessa Oulun yliopisto Rauno Heikkilä, Oulun yliopisto Esityksen sisältö Tutkimusyksikön
Virtuaalinen liikenteen tutkimuskeskus 16.2.2012 BANK, Unioninkatu 20, Helsinki Liikennetutkimuksen osaaminen Suomessa Oulun yliopisto Rauno Heikkilä, Oulun yliopisto Esityksen sisältö Tutkimusyksikön
in condition monitoring
 Etäteknologioiden automaatiosovellukset Using e-speak e in condition monitoring tutkija professori Hannu Koivisto Sisältö Tausta Globaali kunnonvalvontajärjestelmä E-speak globaalissa kunnonvalvontajärjestelmässä
Etäteknologioiden automaatiosovellukset Using e-speak e in condition monitoring tutkija professori Hannu Koivisto Sisältö Tausta Globaali kunnonvalvontajärjestelmä E-speak globaalissa kunnonvalvontajärjestelmässä
14. Luento: Kohti hajautettuja sulautettuja järjestelmiä. Tommi Mikkonen,
 14. Luento: Kohti hajautettuja sulautettuja järjestelmiä Tommi Mikkonen, tommi.mikkonen@tut.fi Agenda Johdanto Hajautettujen järjestelmien väyliä LON CAN Pienen laitteen sisäinen hajautus OpenCL Network
14. Luento: Kohti hajautettuja sulautettuja järjestelmiä Tommi Mikkonen, tommi.mikkonen@tut.fi Agenda Johdanto Hajautettujen järjestelmien väyliä LON CAN Pienen laitteen sisäinen hajautus OpenCL Network
Älykäs automaatio ja teollinen internet
 Älykäs automaatio ja teollinen internet - hankkeen esittely maakuntahallitukselle Projektipäällikkö Janne Känsäkoski, Centria Hankevastaava Veli-Matti Tornikoski, Chydenius 14.11.2016 Hankkeen tavoitteet
Älykäs automaatio ja teollinen internet - hankkeen esittely maakuntahallitukselle Projektipäällikkö Janne Känsäkoski, Centria Hankevastaava Veli-Matti Tornikoski, Chydenius 14.11.2016 Hankkeen tavoitteet
Maailman ensimmäinen Plug & Go etäyhteyslaite
 Maailman ensimmäinen Plug & Go etäyhteyslaite PATENTOITU RATKAISU» Suojattu patenteilla laitejärjestely sekä yhteydenmuodostus menetelmä ONGELMA» Sisäverkossa verkkolaitteiden käyttäminen on helppoa» Kun
Maailman ensimmäinen Plug & Go etäyhteyslaite PATENTOITU RATKAISU» Suojattu patenteilla laitejärjestely sekä yhteydenmuodostus menetelmä ONGELMA» Sisäverkossa verkkolaitteiden käyttäminen on helppoa» Kun
ELEC-C1110 Automaatio- ja systeemitekniikan. Luento 11 Esimerkki automaation soveltamisesta
 ELEC-C1110 Automaatio- ja systeemitekniikan perusteet Luento 11 Esimerkki automaation soveltamisesta Tämän luennon aihe Esimerkki automaation soveltamisesta käytännössä: WorkPartner-palvelurobotti WorkPartner
ELEC-C1110 Automaatio- ja systeemitekniikan perusteet Luento 11 Esimerkki automaation soveltamisesta Tämän luennon aihe Esimerkki automaation soveltamisesta käytännössä: WorkPartner-palvelurobotti WorkPartner
Maastokartta pistepilvenä Harri Kaartinen, Maanmittauspäivät
 Maastokartta pistepilvenä 22.3.2018 Harri Kaartinen, Maanmittauspäivät 2018 1 Sisältö Pistepilvi aineistolähteenä Aineiston keruu Aineistojen yhdistäminen ja käsittely Sovellukset 22.3.2018 Harri Kaartinen,
Maastokartta pistepilvenä 22.3.2018 Harri Kaartinen, Maanmittauspäivät 2018 1 Sisältö Pistepilvi aineistolähteenä Aineiston keruu Aineistojen yhdistäminen ja käsittely Sovellukset 22.3.2018 Harri Kaartinen,
Työasemien hallinta Microsoft System Center Configuration Manager 2007. Jarno Mäki Head of Training Operations M.Eng, MCT, MCSE:Security, MCTS
 Työasemien hallinta Microsoft System Center Configuration Jarno Mäki Head of Training Operations M.Eng, MCT, MCSE:Security, MCTS IT Education Center Agenda Yleistä työasemien hallinnasta Työasemien hallinta
Työasemien hallinta Microsoft System Center Configuration Jarno Mäki Head of Training Operations M.Eng, MCT, MCSE:Security, MCTS IT Education Center Agenda Yleistä työasemien hallinnasta Työasemien hallinta
Robotiikan tulevaisuus ja turvallisuus
 Robotiikan tulevaisuus ja turvallisuus NWE 2014 Satelliittiseminaari 4.11.2014 Jyrki Latokartano TTY Kone- ja Tuotantotekniikan laitos Suomen Robotiikkayhdistys ry Robottiturvallisuus? Kohti ihmisen ja
Robotiikan tulevaisuus ja turvallisuus NWE 2014 Satelliittiseminaari 4.11.2014 Jyrki Latokartano TTY Kone- ja Tuotantotekniikan laitos Suomen Robotiikkayhdistys ry Robottiturvallisuus? Kohti ihmisen ja
TOSIBOX RATKAISU. »TOSIBOX:n avulla yhteys muodostuu automaattisesti internettiä hyödyntäen eri toimilaitteiden välille
 ONGELMA» Sisäverkossa verkkolaitteiden käyttäminen on helppoa» Kun verkkolaitteet yhdistetään toisiinsa internetin yli, yhteys ei muodostu automaattisesti» Yhteyden muodostus perinteisesti on vaatinut
ONGELMA» Sisäverkossa verkkolaitteiden käyttäminen on helppoa» Kun verkkolaitteet yhdistetään toisiinsa internetin yli, yhteys ei muodostu automaattisesti» Yhteyden muodostus perinteisesti on vaatinut
Power Steering for ATV
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Power Steering for ATV 15.1. - Loppuraportti Työn valvoja: Ville Matikainen Projektin tekijät: Juuso Meriläinen Antti Alakiikonen Aleksi Vulli Juuso
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Power Steering for ATV 15.1. - Loppuraportti Työn valvoja: Ville Matikainen Projektin tekijät: Juuso Meriläinen Antti Alakiikonen Aleksi Vulli Juuso
SMACC Välkky-hanke: 3D-tulostuksella kilpailukykyä pk-yrityksiin
 SMACC Välkky-hanke: 3D-tulostuksella kilpailukykyä pk-yrityksiin Konepaja-messut 20.3.-22.3.2018, Tampereen messukeskus SMACC-Labs Risto Kuivanen SMACC-Labs tarjoaa valmistavan teollisuuden yritykselle
SMACC Välkky-hanke: 3D-tulostuksella kilpailukykyä pk-yrityksiin Konepaja-messut 20.3.-22.3.2018, Tampereen messukeskus SMACC-Labs Risto Kuivanen SMACC-Labs tarjoaa valmistavan teollisuuden yritykselle
Welcome to the World of Machine Control
 Welcome to the World of Machine Control 3D-koneohjauksen hyödyntäminen paalutustyömaalla Vesa-Matti Tanhuanpää Scanlaser Oy Hexagon on globaali toimija, jolla on vahva markkinaosuus mittausteknologioiden
Welcome to the World of Machine Control 3D-koneohjauksen hyödyntäminen paalutustyömaalla Vesa-Matti Tanhuanpää Scanlaser Oy Hexagon on globaali toimija, jolla on vahva markkinaosuus mittausteknologioiden
SESP Simulointiympäristön tarjoamat mahdollisuudet älykkäiden sähköverkkojen tutkimuksessa ja kehittämisessä
 SESP Simulointiympäristön tarjoamat mahdollisuudet älykkäiden sähköverkkojen tutkimuksessa ja kehittämisessä Katja Sirviö 30.10.2018 Ympäristö & omavaraisuus -seminaari Vaasa Esityksen sisältö VY:N taustaa
SESP Simulointiympäristön tarjoamat mahdollisuudet älykkäiden sähköverkkojen tutkimuksessa ja kehittämisessä Katja Sirviö 30.10.2018 Ympäristö & omavaraisuus -seminaari Vaasa Esityksen sisältö VY:N taustaa
XPages käyttö ja edut Jarkko Pietikäinen toimitusjohtaja, Netwell Oy
 IBM Collaboration Forum ٨.٣.٢٠١١ XPages käyttö ja edut Jarkko Pietikäinen toimitusjohtaja, Netwell Oy ٢٠١١ IBM Corporation Domino-sovelluskehitys Nopea kehitysympäristö (Rapid application development,
IBM Collaboration Forum ٨.٣.٢٠١١ XPages käyttö ja edut Jarkko Pietikäinen toimitusjohtaja, Netwell Oy ٢٠١١ IBM Corporation Domino-sovelluskehitys Nopea kehitysympäristö (Rapid application development,
AS TENTTIJÄRJESTYS LUKUVUOSI päiv as
 AS TENTTIJÄRJESTYS LUKUVUOSI 2012-2013 päiv. 14.8.2012 as Pv Pvm Aika Kurssin koodi ja nimi Sali Tentti/Vk Viikko To 06.09.12 13:00-16:00 AS-0.1103 C-ohjelmoinnin peruskurssi AS1 T02 36 Ti 23.10.12 13:00-16:00
AS TENTTIJÄRJESTYS LUKUVUOSI 2012-2013 päiv. 14.8.2012 as Pv Pvm Aika Kurssin koodi ja nimi Sali Tentti/Vk Viikko To 06.09.12 13:00-16:00 AS-0.1103 C-ohjelmoinnin peruskurssi AS1 T02 36 Ti 23.10.12 13:00-16:00
Todellinen 3D-ohjauksensuuntauslaite
 geoliner 680 ja geoliner 780 Huipputarkka Kaikki ajoneuvojen säätöarvot tulevat suoraan autovalmistajilta ja ovat tarkkoja ja luotettavia. Kehittynyt kamerajärjestelmä on erittäin tarkka ja takaa luotettavan
geoliner 680 ja geoliner 780 Huipputarkka Kaikki ajoneuvojen säätöarvot tulevat suoraan autovalmistajilta ja ovat tarkkoja ja luotettavia. Kehittynyt kamerajärjestelmä on erittäin tarkka ja takaa luotettavan
E. Oja ja H. Mannila Datasta Tietoon: Luku 2
 2. DATASTA TIETOON: MITÄ DATAA; MITÄ TIETOA? 2.1. Data-analyysin ongelma Tulevien vuosien valtava haaste on digitaalisessa muodossa talletetun datan kasvava määrä Arvioita: Yhdysvaltojen kongressin kirjasto
2. DATASTA TIETOON: MITÄ DATAA; MITÄ TIETOA? 2.1. Data-analyysin ongelma Tulevien vuosien valtava haaste on digitaalisessa muodossa talletetun datan kasvava määrä Arvioita: Yhdysvaltojen kongressin kirjasto
AKKREDITOITU TESTAUSLABORATORIO ACCREDITED TESTING LABORATORY WE CERTIFICATION OY OPERATOR LABORATORY
 T304/A01/2017 Liite 1 / Appendix 1 Sivu / Page 1(5) AKKREDITOITU TESTAUSLABORATORIO ACCREDITED TESTING LABORATORY WE CERTIFICATION OY OPERATOR LABORATORY Tunnus Code Laboratorio Laboratory Osoite Address
T304/A01/2017 Liite 1 / Appendix 1 Sivu / Page 1(5) AKKREDITOITU TESTAUSLABORATORIO ACCREDITED TESTING LABORATORY WE CERTIFICATION OY OPERATOR LABORATORY Tunnus Code Laboratorio Laboratory Osoite Address
Rakentamisen 3D-mallit hyötykäyttöön
 Rakentamisen 3D-mallit hyötykäyttöön 1 BIM mallien tutkimuksen suunnat JAO, Jyväskylä, 22.05.2013 Prof. Jarmo Laitinen, TTY rakentamisen tietotekniikka Jarmo Laitinen 23.5.2013 Jarmo Laitinen 23.5.2013
Rakentamisen 3D-mallit hyötykäyttöön 1 BIM mallien tutkimuksen suunnat JAO, Jyväskylä, 22.05.2013 Prof. Jarmo Laitinen, TTY rakentamisen tietotekniikka Jarmo Laitinen 23.5.2013 Jarmo Laitinen 23.5.2013
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Koneenohjausjärjestelmien arkkitehtuurit. Sulautettu ohjelmointi Veli-Pekka Eloranta
 Koneenjärjestelmien arkkitehtuurit Sulautettu ohjelmointi 15.3. 2012 Veli-Pekka Eloranta Taustaa Sulake ja Sulava-projektit Yhteistyötä konepajayritysten kanssa Arkkitehtuuriarviointeja, dokumentaatio
Koneenjärjestelmien arkkitehtuurit Sulautettu ohjelmointi 15.3. 2012 Veli-Pekka Eloranta Taustaa Sulake ja Sulava-projektit Yhteistyötä konepajayritysten kanssa Arkkitehtuuriarviointeja, dokumentaatio
Massakustomoinnin mahdollisuudet perusparannushankkeissa
 Jarmo I. Suominen Professor of MassCustomization / UIAH Visiting Scientist MIT MediaLab Open Source Building Alliance Massakustomoinnin mahdollisuudet perusparannushankkeissa Reaktiivisesta tarve lähtöisestä
Jarmo I. Suominen Professor of MassCustomization / UIAH Visiting Scientist MIT MediaLab Open Source Building Alliance Massakustomoinnin mahdollisuudet perusparannushankkeissa Reaktiivisesta tarve lähtöisestä
Luento 4 Kolmiulotteiset kuvat. fotogrammetriaan ja kaukokartoitukseen
 Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Luento 4 Kolmiulotteiset kuvat 1 Kuvan kolmiulotteisuus 2 Stereokuva 3 Aiheita Parallaksi. Stereoskopia. Stereoskooppinen näkeminen. Stereomallin kokonaisplastiikka. Stereokuvaus. Dokumentointi stereodiakuvin.
Palvelun toteuttaminen hajautetussa palvelualustassa
 toteuttaminen hajautetussa palvelualustassa Diplomityöseminaariesitys 20.8.2002 Mika Laurell Aihe Aihe: toteuttaminen hajautetussa palvelualustassa Valvoja: prof. Seppo J. Halme, Teknillinen korkeakoulu
toteuttaminen hajautetussa palvelualustassa Diplomityöseminaariesitys 20.8.2002 Mika Laurell Aihe Aihe: toteuttaminen hajautetussa palvelualustassa Valvoja: prof. Seppo J. Halme, Teknillinen korkeakoulu
Peltorobottikilpailu Joonas Ryynänen (C) Perttu Heikkilä Ville Matikainen Mikko Vihlman
 Perttu Heikkilä Ville Matikainen Mikko Vihlman") Peltorobottikilpailu 2011 Joonas Ryynänen (C) Perttu Heikkilä Ville Matikainen Mikko Vihlman Peltorobottikilpailu (2003-) Neljä kertaa Hollannissa Kolme kertaa Saksassa 2011 kilpailu kesä-heinäkuussa Tanskassa
Peltorobottikilpailu 2011 Joonas Ryynänen (C) Perttu Heikkilä Ville Matikainen Mikko Vihlman Peltorobottikilpailu (2003-) Neljä kertaa Hollannissa Kolme kertaa Saksassa 2011 kilpailu kesä-heinäkuussa Tanskassa
Uusia sovelluksia kalojen havainnointiin Case Montta. Pertti Paakkolanvaara Simsonar Oy. Kuva Maanmittaus laitos 2.2.
 Uusia sovelluksia kalojen havainnointiin Case Montta Pertti Paakkolanvaara Simsonar Oy Kuva Maanmittaus laitos 2.2.2018 CC-lisenssi Simsonar Oy Oululainen laitevalmistaja, perustettu 2008 Heikki Oukka
Uusia sovelluksia kalojen havainnointiin Case Montta Pertti Paakkolanvaara Simsonar Oy Kuva Maanmittaus laitos 2.2.2018 CC-lisenssi Simsonar Oy Oululainen laitevalmistaja, perustettu 2008 Heikki Oukka
IBM Iptorin pilven reunalla
 IBM Iptorin pilven reunalla Teppo Seesto Arkkitehti Pilvilinnat seesto@fi.ibm.com Cloud Computing Pilvipalvelut IT:n teollistaminen Itsepalvelu Maksu käytön mukaan Nopea toimitus IT-palvelujen webbikauppa
IBM Iptorin pilven reunalla Teppo Seesto Arkkitehti Pilvilinnat seesto@fi.ibm.com Cloud Computing Pilvipalvelut IT:n teollistaminen Itsepalvelu Maksu käytön mukaan Nopea toimitus IT-palvelujen webbikauppa
Sähkötekniikan kanditutkinnon yleinen rakenne Tutkinnon laajuus 180 op
 Sopivat myös näihin Sähkötekniikan kanditutkinnon yleinen rakenne Tutkinnon laajuus 180 op Yleisopinnot ja kielet 92 op Matemaattiset valmiudet, fysiikka, kielet, yleiset ammatilliset valmiudet Pääaine:
Sopivat myös näihin Sähkötekniikan kanditutkinnon yleinen rakenne Tutkinnon laajuus 180 op Yleisopinnot ja kielet 92 op Matemaattiset valmiudet, fysiikka, kielet, yleiset ammatilliset valmiudet Pääaine:
Liikkuvien työkoneiden etäseuranta
 Liikkuvien työkoneiden etäseuranta TAMK IoT Seminaari 14.4.2016 2 1) IoT liiketoiminnan tukena 2) Iot ja liikkuvat työkoneet 3) Case esimerkit 4) Yhteenveto, johtopäätökset, tulevaisuuden näkymät Cinia
Liikkuvien työkoneiden etäseuranta TAMK IoT Seminaari 14.4.2016 2 1) IoT liiketoiminnan tukena 2) Iot ja liikkuvat työkoneet 3) Case esimerkit 4) Yhteenveto, johtopäätökset, tulevaisuuden näkymät Cinia
Juha Viinikka, Senior Manager, Corporate Security, Kesko
 6.6.2019 Juha Viinikka, Senior Manager, Corporate Security, Kesko Esityksen teemat Tarvitaan business case Ajatellaan uudella tavalla ja laajemmin Suunnitelmat osaksi strategiaa ja arkkitehtuurimallia
6.6.2019 Juha Viinikka, Senior Manager, Corporate Security, Kesko Esityksen teemat Tarvitaan business case Ajatellaan uudella tavalla ja laajemmin Suunnitelmat osaksi strategiaa ja arkkitehtuurimallia
Käyttäjien tunnistaminen ja käyttöoikeuksien hallinta hajautetussa ympäristössä
 www.niksula.cs.hut.fi/~jjkankaa// Demosovelluksen tekninen määrittely v. 0.6 Päivitetty 11.12.2000 klo 20:26 Mickey Shroff 2 (12) Dokumentin versiohistoria Versio Päivämäärä Tekijä / muutoksen tekijä Selite
www.niksula.cs.hut.fi/~jjkankaa// Demosovelluksen tekninen määrittely v. 0.6 Päivitetty 11.12.2000 klo 20:26 Mickey Shroff 2 (12) Dokumentin versiohistoria Versio Päivämäärä Tekijä / muutoksen tekijä Selite
S09 04 Kohteiden tunnistaminen 3D datasta
 AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
A11-07 Measurements with machine vision Projektisuunnitelma
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-07 Measurements with machine vision Projektisuunnitelma Niko Nyrhilä 25.9.2011 Niko Nyrhilä 2 1 Projektityön tavoite Projektityön tavoitteena
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-07 Measurements with machine vision Projektisuunnitelma Niko Nyrhilä 25.9.2011 Niko Nyrhilä 2 1 Projektityön tavoite Projektityön tavoitteena
Langattomat ubi-teknologiat sovelluksia ja liiketoimintamahdollisuuksia. Juha Miettinen Ohjelmajohtaja Jokapaikan tietotekniikan klusteriohjelma
 Langattomat ubi-teknologiat sovelluksia ja liiketoimintamahdollisuuksia Juha Miettinen Ohjelmajohtaja Jokapaikan tietotekniikan klusteriohjelma Sisältö Jokapaikan tietotekniikan osamisklusteri? UBI-sovellusmarkkina
Langattomat ubi-teknologiat sovelluksia ja liiketoimintamahdollisuuksia Juha Miettinen Ohjelmajohtaja Jokapaikan tietotekniikan klusteriohjelma Sisältö Jokapaikan tietotekniikan osamisklusteri? UBI-sovellusmarkkina
ETCS Level , Clarion Hotel Helsinki. Julkinen Siemens Osakeyhtiö 2016
 ETCS Level 3 1.12.2016, Clarion Hotel Helsinki Julkinen 2016 siemens.fi European Train Control System (ETCS) Level 3 ETCS - Nykytila ja tulevaisuuden suunta Tausta Toiminnallisuus Kehitystilanne ja tavoitteet
ETCS Level 3 1.12.2016, Clarion Hotel Helsinki Julkinen 2016 siemens.fi European Train Control System (ETCS) Level 3 ETCS - Nykytila ja tulevaisuuden suunta Tausta Toiminnallisuus Kehitystilanne ja tavoitteet
Sähköpäivä 23.4.2015 - Kiinteistöautomaatio; Kysynnän jousto - Rajapinnat. Veijo Piikkilä Tampereen ammattikorkeakoulu
 Sähköpäivä 23.4.2015 - Kiinteistöautomaatio; Kysynnän jousto - Rajapinnat Veijo Piikkilä Tampereen ammattikorkeakoulu Kiinteistöautomaatio on rakennuksen aivot Lähde: Siemens 29.4.2015 TALOTEKNIIKKA/VPi
Sähköpäivä 23.4.2015 - Kiinteistöautomaatio; Kysynnän jousto - Rajapinnat Veijo Piikkilä Tampereen ammattikorkeakoulu Kiinteistöautomaatio on rakennuksen aivot Lähde: Siemens 29.4.2015 TALOTEKNIIKKA/VPi
Automaattisesti kilpailukykyinen teollisuus
 Automaattisesti kilpailukykyinen teollisuus SATAKUNTA ON ROBOTTIMAAKUNTA, JONKA SYDÄN ON ULVILASSA Automation City Ulvila 100 robotiikka, IoT ja AI yritystä. 1 500 näiden alojen asiantuntijaa. Kaksi korkeakoulua,
Automaattisesti kilpailukykyinen teollisuus SATAKUNTA ON ROBOTTIMAAKUNTA, JONKA SYDÄN ON ULVILASSA Automation City Ulvila 100 robotiikka, IoT ja AI yritystä. 1 500 näiden alojen asiantuntijaa. Kaksi korkeakoulua,
Luento 6: Stereo- ja jonomallin muodostaminen
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 5.10.2004) Luento 6: Stereo- ja jonomallin muodostaminen AIHEITA Keskinäinen orientointi Esimerkki
Muistitko soittaa asiakkaallesi?
 webcrm Finland 1 webcrm Finland Muistitko soittaa asiakkaallesi? Riippumatta siitä, oletko myyntipäällikkö, markkinoija vai työskenteletkö HR tehtävissä, voit käyttää CRM ratkaisua erilaisiin tarpeisiin.
webcrm Finland 1 webcrm Finland Muistitko soittaa asiakkaallesi? Riippumatta siitä, oletko myyntipäällikkö, markkinoija vai työskenteletkö HR tehtävissä, voit käyttää CRM ratkaisua erilaisiin tarpeisiin.
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää
 Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
Koesuunnitelma. ViDRoM Virtual Design of Rotating Machines. Raine Viitala
 Koesuunnitelma ViDRoM Virtual Design of Rotating Machines Raine Viitala ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat laakerit, kolmikulmaiset
Koesuunnitelma ViDRoM Virtual Design of Rotating Machines Raine Viitala ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat laakerit, kolmikulmaiset
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
AS Automaatio ja systeemitekniikan projektityöt Projektisuunnitelma Syksy 2009 A09 05 OSGi IRC Bot For Coffee Maker
 AS 0.3200 Automaatio ja systeemitekniikan projektityöt Projektisuunnitelma Syksy 2009 A09 05 OSGi IRC Bot For Coffee Maker Henri Nieminen Juha Sironen Palautettu: 21.9.2009 Nieminen, Sironen Sisällysluettelo
AS 0.3200 Automaatio ja systeemitekniikan projektityöt Projektisuunnitelma Syksy 2009 A09 05 OSGi IRC Bot For Coffee Maker Henri Nieminen Juha Sironen Palautettu: 21.9.2009 Nieminen, Sironen Sisällysluettelo
Ohjausjärjestelmien modernisointi
 Ohjausjärjestelmien modernisointi Asko Heikola Senior Manager, Automation Technology Board and Paper Mills Turvallisen tekniikan seminaari 2018 Valmet 3,16 Mrd liikevaihto 12 200 työntekijää 40% maailman
Ohjausjärjestelmien modernisointi Asko Heikola Senior Manager, Automation Technology Board and Paper Mills Turvallisen tekniikan seminaari 2018 Valmet 3,16 Mrd liikevaihto 12 200 työntekijää 40% maailman
ÄLYKÄS VESI Osahankkeiden esittely. Aloitusseminaari 12.5.2015 Pentti Janhunen
 ÄLYKÄS VESI Osahankkeiden esittely Aloitusseminaari 12.5.2015 Pentti Janhunen Osahankkeiden esittely HSY:n avoin pilottialusta yrityslähtöisen tuotekehityksen tukena Älykkäät mittalaitteet vesijohto- ja
ÄLYKÄS VESI Osahankkeiden esittely Aloitusseminaari 12.5.2015 Pentti Janhunen Osahankkeiden esittely HSY:n avoin pilottialusta yrityslähtöisen tuotekehityksen tukena Älykkäät mittalaitteet vesijohto- ja
Pintasääasemaverkon vikadiagnostiikkaa DADAssa
 TEKNILLINEN KORKEAKOULU Systeemitekniikan laboratorio Pintasääasemaverkon vikadiagnostiikkaa DADAssa Vesa Hasu DADA? 2 Pintasääasemaverkon vikadiagnostiikkaa... Yleistä - DADA DADA: Datafuusio- ja diagnostiikkamenetelmien
TEKNILLINEN KORKEAKOULU Systeemitekniikan laboratorio Pintasääasemaverkon vikadiagnostiikkaa DADAssa Vesa Hasu DADA? 2 Pintasääasemaverkon vikadiagnostiikkaa... Yleistä - DADA DADA: Datafuusio- ja diagnostiikkamenetelmien
Optimoinnin sovellukset
 Optimoinnin sovellukset Timo Ranta Tutkijatohtori TTY Porin laitos OPTIMI 4.12.2014 Mitä optimointi on? Parhaan ratkaisun systemaattinen etsintä kaikkien mahdollisten ratkaisujen joukosta Tieteellinen
Optimoinnin sovellukset Timo Ranta Tutkijatohtori TTY Porin laitos OPTIMI 4.12.2014 Mitä optimointi on? Parhaan ratkaisun systemaattinen etsintä kaikkien mahdollisten ratkaisujen joukosta Tieteellinen
Additions, deletions and changes to courses for the academic year Mitä vanhoja kursseja uusi korvaa / kommentit
 s, s and changes to courses for the academic year 2016 2017 Mikro ja nanotekniikan laitos Department for Micro and Nanosciences S 69, S 87, S 104, S 129, ELEC A3, ELEC C3, ELEC D3, ELEC E3, ELEC L3 T 4030
s, s and changes to courses for the academic year 2016 2017 Mikro ja nanotekniikan laitos Department for Micro and Nanosciences S 69, S 87, S 104, S 129, ELEC A3, ELEC C3, ELEC D3, ELEC E3, ELEC L3 T 4030
BIM Suunnittelun ja rakentamisen uusiutuvat toimintatavat Teppo Rauhala
 BIM Suunnittelun ja rakentamisen uusiutuvat toimintatavat Teppo Rauhala Proxion 19.10.2015 Proxion BIM historiikkia Kehitystyö lähtenyt rakentamisen tarpeista Työkoneautomaatio alkoi yleistymään 2000 luvulla
BIM Suunnittelun ja rakentamisen uusiutuvat toimintatavat Teppo Rauhala Proxion 19.10.2015 Proxion BIM historiikkia Kehitystyö lähtenyt rakentamisen tarpeista Työkoneautomaatio alkoi yleistymään 2000 luvulla