Peltorobottikilpailu Joonas Ryynänen (C) Perttu Heikkilä Ville Matikainen Mikko Vihlman
|
|
|
- Hannu Kokkonen
- 7 vuotta sitten
- Katselukertoja:
Transkriptio
1 Peltorobottikilpailu 2011 Joonas Ryynänen (C) Perttu Heikkilä Ville Matikainen Mikko Vihlman
2 Peltorobottikilpailu (2003-) Neljä kertaa Hollannissa Kolme kertaa Saksassa 2011 kilpailu kesä-heinäkuussa Tanskassa Robotin on tarkoitus suorittaa itsenäisesti tehtäviä maissipellolla
3 Kilpailutehtäviä Ajo kaarevilla riveillä Riviajo tietyssä järjestyksessä Rikkaruohontuhoaminen Freestyle



4 Vanhoja peltorobotteja Smartwheels Demeter Wheels of Corntune (5.)


 2010 -")
5 Vanhoja peltorobotteja Mean Maize Maze Machine (1.) 2009 EasyWheels (2.) Turtle Beetle (3.)
6 2011 Joukkue Neljä AS-projektityökurssilaista Kolme mekatroniikan projektityökurssilaista Neljä agroteknologian opiskelijaa (Helsingin yliopisto) Kolme ohjaajaa

7 Cornivore
8 Mitä joukkue on tehnyt, syksy Koko joukkue Vanhoihin peltorobotteihin tutustuminen Mikrokontrollerikoulu Robotin ominaisuuksien speksaus Mekatroniikka-opiskelijat (MEK) Robotin osien CAD-mallintaminen Akselimoduulin ja jousituksen suunnittelu Agroteknologian opiskelijat (AGTEK) Robotiikan, ohjelmoinnin, säätöteorian ja CADmallinnuksen opettelua Bambino-robotin ohjelmointiharjoitus Peltorobotin työkoneen suunnittelu

9 Mitä joukkue on tehnyt, kevät MEK: Kokoonpantu robotin mekaniikka ja elektroniikka Ohjelmoitu mikrokontrollereja AGTEK: Suunniteltu ja rakennettu perävaunu ja telakointiasema


10 Työkone (AGTEK) Ideoita: Mittausten tekeminen, harvennus, rikkakasvien hävitys jne. Valinta: Lannoitteenlevitin + telakointiasema lastaukseen ja lataukseen Robotti kulkee telakointiaseman luo ja peruuttaa sinne lastausta ja akunlatausta varten Käytetään Junkkari Oy:n lahjoittamia syöttölaitteita
")


11 Akselimoduuli ja jousitus (MEK) Tavoitteet Akselimoduuli kapeammaksi, jotta pyörät mahtuvat kääntymään helpommin Jousituksella parempi sivuttaisvakaus
12 Mitä me (AS) olemme tehneet, syksy Ohjelmointityökaluihin ja robotin tietokoneisiin (fitpc, ebox) tutustuminen MS Visual Studio, C#, Simulink Stateflow Peltorobotin simulaattorin kehittäminen Simulink-malli robotin kinematiikalle Antureiden (US, IR, laser) mallintaminen Maissipeltojen generointi Matlabilla Robotin ohjaaminen joystickillä ja algoritmeilla

13 Simulaattorin Simulink Framework Kinemaattinen malli, anturit, paikannus, navigointi ja simuloinnin datankäsittely toteutetaan modulaarisesti erillisinä kirjastoina
14 Simulaattori

15 Simulink-malleja 4 rangepack_fl 5 rangepack_fr 6 rangepack_rr 7 rangepack_rl 1 IMU_data rangepack_f l IR_data rangepack_f r IR_data rangepack_rr rangepack_rl US_data US_data rangepack_raw to SI IMU_data sensor_data Tätä pitää siistä kun selviää tarkemmin mitä sensoreilta tulee ja millä tavalla. distances Data Store Read distances sensor_data 2 axel_raw_in_f ront position_data 1 axel_raw_in_front 3 axel_raw_in_rear axel_mux axel_raw_in_rear Axel_raw to axel_mux axel_mux FitPC Signal Conversion position_data 1 axel_raw_in_front Nämä blokit tilapäisiä, laitetaan oikeat tilalle kun muunnokset selviävät <module> Odometriaa ei hyödynnetä eboxilla, vaan se lähetetään vain FitPC:lle fuusioitavaksi, josta se tulee position_datan kautta tänne. Myöhemmin voidaan hyödyntää tässä suoraan, jos FitPC:n kautta kierrättäminen osoittautuu liian hitaaksi. distances Data Store Memory Demo3b:ssä esimerkit data storen käytöstä Signal Conversion1 2 axel_mux <mode> 3 position_data 4 user_interface 5 joystick Signal Conversion3 position_data user_interf ace joy stick ebox robot_control module_f ront axel_raw_out_f ront robot_control module_rear axel_raw_out_rear Robot_control to axel_raw <serv opot> <motorv el> <serv opwm> <motorpwm> 1 axel_raw_out_front 2 axel_raw_in_rear <module> Signal Conversion1 2 axel_raw_out_rear
16 Mitä me (AS) olemme tehneet, kevät Algoritmien kehitystä edelleen Etäkäyttöliittymän ohjelmointi C#:lla Laser-skannerin, anturien, kameran yms. laitteiden käyttöönottoa ja konffausta Konenäköalgoritmien kehittelyä NI Vision assistant-ohjelmalla Tietokoneiden ja mikrokontrollerien keskeisen kommunikaation toteutus
17 Algoritmeja
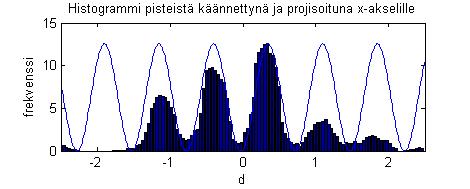
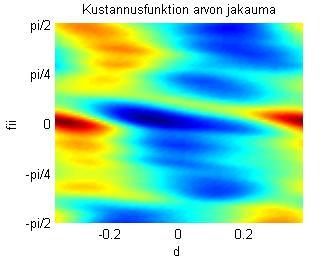
18 Demot Robotin esittely Etäkäyttöliittymä Hough-algoritmi
S14 09 Sisäpeltorobotti AS Automaatio ja systeemitekniikan projektityöt. Antti Kulpakko, Mikko Ikonen
 S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
S14 09 Sisäpeltorobotti AS Automaatio ja systeemitekniikan projektityöt. Antti Kulpakko, Mikko Ikonen
 S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
Projektisuunnitelma. Radio-ohjattavan pienoismallin mekatroniikan ja ohjelmiston kehitys
 1 Radio-ohjattavan pienoismallin mekatroniikan ja ohjelmiston kehitys Muutoshistoria Versionumero Pvm Selitys Tekijä(t) 0.1 18.9.2012 Otso Saarentaus 2 Sisällysluettelo 1 PROJEKTIN SISÄLTÖ... 3 1.1 TAUSTA......3
1 Radio-ohjattavan pienoismallin mekatroniikan ja ohjelmiston kehitys Muutoshistoria Versionumero Pvm Selitys Tekijä(t) 0.1 18.9.2012 Otso Saarentaus 2 Sisällysluettelo 1 PROJEKTIN SISÄLTÖ... 3 1.1 TAUSTA......3
AS Automaatio ja systeemitekniikan projektityöt A13 10 Radio ohjattavan pienoismallin ohjausjärjestelmän ja käyttöliittymän kehittäminen
 Väliraportti AS 0.3200 Automaatio ja systeemitekniikan projektityöt A13 10 Radio ohjattavan pienoismallin ohjausjärjestelmän ja käyttöliittymän kehittäminen Toni Liski, Konsta Hölttä, Lasse Kortetjärvi
Väliraportti AS 0.3200 Automaatio ja systeemitekniikan projektityöt A13 10 Radio ohjattavan pienoismallin ohjausjärjestelmän ja käyttöliittymän kehittäminen Toni Liski, Konsta Hölttä, Lasse Kortetjärvi
Freestylen säännöt 2019
 Freestylen säännöt 2019 Freestylesarjassa oppilaat työstävät vuoden 2019 teemaan liittyvän, muodoltaan ja toteutukseltaan vapaavalintaisen automaatioon ja robotiikkaan liittyvän työn. Oppilaat sekä suunnittelevat
Freestylen säännöt 2019 Freestylesarjassa oppilaat työstävät vuoden 2019 teemaan liittyvän, muodoltaan ja toteutukseltaan vapaavalintaisen automaatioon ja robotiikkaan liittyvän työn. Oppilaat sekä suunnittelevat
S09 04 Kohteiden tunnistaminen 3D datasta
 AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
Peltorobotin akselimoduulin kontrolleri
 Peltorobotin akselimoduulin kontrolleri Automaatio- ja systeemitekniikan projektityöt B.Sc. Joni Rannisto (Mech.) Janne Hafrén (Mech.) Matti Koskinen (Mech.) Esitelmän rakenne 1. Tehtävänanto ja vaatimukset
Peltorobotin akselimoduulin kontrolleri Automaatio- ja systeemitekniikan projektityöt B.Sc. Joni Rannisto (Mech.) Janne Hafrén (Mech.) Matti Koskinen (Mech.) Esitelmän rakenne 1. Tehtävänanto ja vaatimukset
Robottikerhon suunnitelma syksylle 2015
 Robottikerhon suunnitelma syksylle 2015 Tekijä Mika Laitila, 25.4.2015. Kerho on suunnattu yläkoululaisille. Ryhmän koko on 16 kerholaista + 2 ohjaajaa. Kerholla on käytössä 8 kappaletta LEGO Mindstorms
Robottikerhon suunnitelma syksylle 2015 Tekijä Mika Laitila, 25.4.2015. Kerho on suunnattu yläkoululaisille. Ryhmän koko on 16 kerholaista + 2 ohjaajaa. Kerholla on käytössä 8 kappaletta LEGO Mindstorms
Electric power steering
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Electric power steering Ohjausmoottorin jäähdytys ja ylikuumenemisen esto Väliraportti 15.10.2014 Työn ohjaaja: Ville Matikainen Tekijät: Samppa
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Electric power steering Ohjausmoottorin jäähdytys ja ylikuumenemisen esto Väliraportti 15.10.2014 Työn ohjaaja: Ville Matikainen Tekijät: Samppa
S11-09 Control System for an. Autonomous Household Robot Platform
 S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
Agenda. Johdanto Ominaispiirteitä Kokonaisjärjestelmän määrittely Eri alojen edustajien roolit Sulautetut järjestelmät ja sulautettu ohjelmointi
 1. Luento: Sulautetut Järjestelmät Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Ominaispiirteitä Kokonaisjärjestelmän määrittely Eri alojen edustajien roolit Sulautetut järjestelmät ja sulautettu
1. Luento: Sulautetut Järjestelmät Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Ominaispiirteitä Kokonaisjärjestelmän määrittely Eri alojen edustajien roolit Sulautetut järjestelmät ja sulautettu
Kokeilukulttuuri ja digiajan vallankumouksellisuus. Mikko Lampi, @jotudin Hacklab Mikkeli
 Kokeilukulttuuri ja digiajan vallankumouksellisuus Mikko Lampi, @jotudin Hacklab Mikkeli Hakkerismin lyhyt oppimäärä Entä todellisuudessa? Uuden luominen, kehittäminen ja parantaminen Sovellukset Laitteet
Kokeilukulttuuri ja digiajan vallankumouksellisuus Mikko Lampi, @jotudin Hacklab Mikkeli Hakkerismin lyhyt oppimäärä Entä todellisuudessa? Uuden luominen, kehittäminen ja parantaminen Sovellukset Laitteet
S11-04 Kompaktikamerat stereokamerajärjestelmässä. Projektisuunnitelma
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Projektisuunnitelma Ari-Matti Reinsalo Anssi Niemi 28.1.2011 Projektityön tavoite Projektityössä
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Projektisuunnitelma Ari-Matti Reinsalo Anssi Niemi 28.1.2011 Projektityön tavoite Projektityössä
VUOROVAIKUTTEISEN ROBOTIIKAN TURVALLISUUS
 MASINA loppuseminaari 14.5.2008 Tampere talo Timo Malm VUOROVAIKUTTEISEN ROBOTIIKAN TURVALLISUUS PUOLIAUTOMAATIORATKAISUT IHMINEN KONE JÄRJESTELMISSÄ (PATRA) Kesto: 5/2006 12/2007 Resurssit: n. 39 htkk;
MASINA loppuseminaari 14.5.2008 Tampere talo Timo Malm VUOROVAIKUTTEISEN ROBOTIIKAN TURVALLISUUS PUOLIAUTOMAATIORATKAISUT IHMINEN KONE JÄRJESTELMISSÄ (PATRA) Kesto: 5/2006 12/2007 Resurssit: n. 39 htkk;
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-03 USB-käyttöinen syvyysanturi 5op 13.9.2011-29.11.2011 Johan Backlund Ohjaaja: Johan Grönholm Johdanto Projektin tavoitteena oli suunnitella
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-03 USB-käyttöinen syvyysanturi 5op 13.9.2011-29.11.2011 Johan Backlund Ohjaaja: Johan Grönholm Johdanto Projektin tavoitteena oli suunnitella
Lisäykset, poistot ja muutokset lukuvuoden opetusohjelmaan Osastoneuvosto
 IITE 7/1 isäykset, poistot ja muutokset lukuvuoden 2005-2006 etusohjelmaan Osastoneuvosto 1..2005 OSASTON YHTEISET ISÄYKSET AS-0.1101 C ohjelmoinnin peruskurssi AS-0.1102 C/C++ ohjelmointi (luennoidaan
IITE 7/1 isäykset, poistot ja muutokset lukuvuoden 2005-2006 etusohjelmaan Osastoneuvosto 1..2005 OSASTON YHTEISET ISÄYKSET AS-0.1101 C ohjelmoinnin peruskurssi AS-0.1102 C/C++ ohjelmointi (luennoidaan
AS Automaatio- ja systeemitekniikan projektityöt
 3/19/2012 AALTO- YLIOPISTO AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Joni Rannisto Matti Koskinen Janne Hafrén 1. Projektin tavoite Projektin tavoitteena on rakentaa akselimoduulin ohjain
3/19/2012 AALTO- YLIOPISTO AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Joni Rannisto Matti Koskinen Janne Hafrén 1. Projektin tavoite Projektin tavoitteena on rakentaa akselimoduulin ohjain
Arkipäivän automaatiota ja robotiikkaa
 Arkipäivän automaatiota ja robotiikkaa 1. oppitunti: Miten laitteet toimivat Lämmittelyharjoitus: Ohjaa ihmisrobottia Video lämmittelyharjoituksesta Mitä ohjelmointi on -video Video: Mitä ohjelmointi on
Arkipäivän automaatiota ja robotiikkaa 1. oppitunti: Miten laitteet toimivat Lämmittelyharjoitus: Ohjaa ihmisrobottia Video lämmittelyharjoituksesta Mitä ohjelmointi on -video Video: Mitä ohjelmointi on
Tilanne sekä MS-A0003/4* Matriisilaskenta 5 op
 MATEMATIIKKA Mat-1.1210 Matematiikan peruskurssi S1 ei järjestetä enää MS-A0103/4* Differentiaali- ja integraalilaskenta I 5 op sekä MS-A0003/4* Matriisilaskenta 5 op Mat-1.1110 Matematiikan peruskurssi
MATEMATIIKKA Mat-1.1210 Matematiikan peruskurssi S1 ei järjestetä enää MS-A0103/4* Differentiaali- ja integraalilaskenta I 5 op sekä MS-A0003/4* Matriisilaskenta 5 op Mat-1.1110 Matematiikan peruskurssi
FinnClean PRO Jussi Ruisniemi Diversey Suomi Oy
 Robotiikka eilen, tänään ja huomenna FinnClean PRO 27. 28.3.2019 Jussi Ruisniemi Diversey Suomi Oy Diversey ja robotiikka Missä robotiikassa mennään? Käyttäjäkokemuksia Business center Sairaala Liikuntakeskus
Robotiikka eilen, tänään ja huomenna FinnClean PRO 27. 28.3.2019 Jussi Ruisniemi Diversey Suomi Oy Diversey ja robotiikka Missä robotiikassa mennään? Käyttäjäkokemuksia Business center Sairaala Liikuntakeskus
S11-04 Kompaktikamerat stereokamerajärjestelmässä. Väliraportti
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Väliraportti Ari-Matti Reinsalo Anssi Niemi 21.3.2011 Tämä väliraportti noudattaa projektisuunnitelman
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Väliraportti Ari-Matti Reinsalo Anssi Niemi 21.3.2011 Tämä väliraportti noudattaa projektisuunnitelman
Elektroniikan uudet pakkausteknnikat ja integrointi mekaniikkaan
 Elektroniikan uudet pakkausteknnikat ja integrointi mekaniikkaan Jukka Ranta 5.9.07 Jukka Ranta 5.9.2007 Muutostekijät ja haasteet Teknologia ei ole kypsää Elektroniikan kehitys on edelleen intensiivistä
Elektroniikan uudet pakkausteknnikat ja integrointi mekaniikkaan Jukka Ranta 5.9.07 Jukka Ranta 5.9.2007 Muutostekijät ja haasteet Teknologia ei ole kypsää Elektroniikan kehitys on edelleen intensiivistä
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
Julkinen loppuraportti Simua Startupin nopea kokeilu Oulun Ritaharjun koulussa
 Julkinen loppuraportti 7.8.2019 Simua Startupin nopea kokeilu Oulun Ritaharjun koulussa Oulun kaupungin nopeiden kokeilujen ohjelma II, Kevät/2019 Tulevaisuuden älykkäät oppimisympäristöt Kokeilun esittely
Julkinen loppuraportti 7.8.2019 Simua Startupin nopea kokeilu Oulun Ritaharjun koulussa Oulun kaupungin nopeiden kokeilujen ohjelma II, Kevät/2019 Tulevaisuuden älykkäät oppimisympäristöt Kokeilun esittely
Miten piensarjatuotantoon saadaan joustavuutta?
 Miten piensarjatuotantoon saadaan joustavuutta? Jyrki Latokartano, Tampereen teknillinen yliopisto Modernin robottitekniikan mahdollisuudet tuotannossa SeAMK 4.4.2017 kello 12.30-16.00 Miten piensarjatuotantoon
Miten piensarjatuotantoon saadaan joustavuutta? Jyrki Latokartano, Tampereen teknillinen yliopisto Modernin robottitekniikan mahdollisuudet tuotannossa SeAMK 4.4.2017 kello 12.30-16.00 Miten piensarjatuotantoon
Antitammirobotti. Antti Meriläinen Martin Pärtel 29. toukokuuta 2009
 Antitammirobotti Antti Meriläinen Martin Pärtel 29. toukokuuta 2009 Helsingin yliopisto Tietojenkäsittelytieteen laitos Robottiohjelmoinnin harjoitustyö
Antitammirobotti Antti Meriläinen Martin Pärtel 29. toukokuuta 2009 Helsingin yliopisto Tietojenkäsittelytieteen laitos Robottiohjelmoinnin harjoitustyö
PLA-32820 Mobiiliohjelmointi. Mika Saari mika.saari@tut.fi http://www.students.tut.fi/~saari5/pla_32820_2015/
 PLA-32820 Mobiiliohjelmointi Mika Saari mika.saari@tut.fi http://www.students.tut.fi/~saari5/pla_32820_205/ . Luento 2 Suoritus vaatimukset Kurssin sisältö Kirjallisuus Mobiiliohjelmointi Mobiililaitteita...
PLA-32820 Mobiiliohjelmointi Mika Saari mika.saari@tut.fi http://www.students.tut.fi/~saari5/pla_32820_205/ . Luento 2 Suoritus vaatimukset Kurssin sisältö Kirjallisuus Mobiiliohjelmointi Mobiililaitteita...
Electric power steering
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Electric power steering Ohjausmoottorin jäähdytys ja ylikuumenemisen esto Projektisuunnitelma 19.9.2014 Työn ohjaaja: Ville Matikainen Tekijät: Samppa
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Electric power steering Ohjausmoottorin jäähdytys ja ylikuumenemisen esto Projektisuunnitelma 19.9.2014 Työn ohjaaja: Ville Matikainen Tekijät: Samppa
Asiantuntijaseminaari Simulaattorikoulutuksen käyttökokemukset Aarno Lybeck
 Asiantuntijaseminaari 14.12.2009 Simulaattorikoulutuksen käyttökokemukset Aarno Lybeck Mitä on simulointi? Simulointi tai simulaatio on todellisuuden jäljittelyä. Todellisuus on ympäröivä maailma. Yleensä
Asiantuntijaseminaari 14.12.2009 Simulaattorikoulutuksen käyttökokemukset Aarno Lybeck Mitä on simulointi? Simulointi tai simulaatio on todellisuuden jäljittelyä. Todellisuus on ympäröivä maailma. Yleensä
ELEC-C1110 Automaatio- ja systeemitekniikan. Luento 11 Esimerkki automaation soveltamisesta
 ELEC-C1110 Automaatio- ja systeemitekniikan perusteet Luento 11 Esimerkki automaation soveltamisesta Tämän luennon aihe Esimerkki automaation soveltamisesta käytännössä: WorkPartner-palvelurobotti WorkPartner
ELEC-C1110 Automaatio- ja systeemitekniikan perusteet Luento 11 Esimerkki automaation soveltamisesta Tämän luennon aihe Esimerkki automaation soveltamisesta käytännössä: WorkPartner-palvelurobotti WorkPartner
S12-11. Portaalinosturi AS-0.3200. Projektisuunnitelma 2012. Oleg Kovalev
 S12-11 Portaalinosturi AS-0.3200 Projektisuunnitelma 2012 Oleg Kovalev Sisällys 1. Työn tavoite... 3 2. Projektin osa-alueet... 3 2.1. Suunnittelu... 3 2.2. Komponenttien hankinta... 3 2.3. Valmistus...
S12-11 Portaalinosturi AS-0.3200 Projektisuunnitelma 2012 Oleg Kovalev Sisällys 1. Työn tavoite... 3 2. Projektin osa-alueet... 3 2.1. Suunnittelu... 3 2.2. Komponenttien hankinta... 3 2.3. Valmistus...
Kon Simuloinnin Rakentaminen Janne Ojala
 Kon 16.4011 Simuloinnin Rakentaminen Janne Ojala Simulointi käytännössä 1/3 Simulaatiomalleja helppo analysoida Ymmärretään ongelmaa paremmin - Opitaan ymmärtämään koneen toimintaa ja siihen vaikuttavia
Kon 16.4011 Simuloinnin Rakentaminen Janne Ojala Simulointi käytännössä 1/3 Simulaatiomalleja helppo analysoida Ymmärretään ongelmaa paremmin - Opitaan ymmärtämään koneen toimintaa ja siihen vaikuttavia
Yrityslähtöisten ideoiden käyttö fysiikan opetuksessa
 Yrityslähtöisten ideoiden käyttö fysiikan opetuksessa 4.10.2012 Osana CoRD-verkostoitumishanketta Jaakko Kaski Lehtori, FT, Oulun seudun ammattikorkeakoulu, tekniikan yksikkö Taustaa Fysiikka on insinöörin
Yrityslähtöisten ideoiden käyttö fysiikan opetuksessa 4.10.2012 Osana CoRD-verkostoitumishanketta Jaakko Kaski Lehtori, FT, Oulun seudun ammattikorkeakoulu, tekniikan yksikkö Taustaa Fysiikka on insinöörin
tulevaisuuden teknologiaratkaisut machine kasvinviljelyssä efficient machines Assisting and adaptive agricultural
 Traktorinoukinvaunuyhdistelmä EFFIMA Energy and life cycle cost ja efficient machines tulevaisuuden teknologiaratkaisut Assisting and adaptive agricultural machine kasvinviljelyssä AGROMASSI Antti Suokannas
Traktorinoukinvaunuyhdistelmä EFFIMA Energy and life cycle cost ja efficient machines tulevaisuuden teknologiaratkaisut Assisting and adaptive agricultural machine kasvinviljelyssä AGROMASSI Antti Suokannas
Tiedonkeruu ja analysointi
 Tiedonkeruu ja analysointi ViDRoM Virtual Design of Rotating Machines Raine Viitala 30.9.2015 ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat
Tiedonkeruu ja analysointi ViDRoM Virtual Design of Rotating Machines Raine Viitala 30.9.2015 ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat
Automaatiotekniikka Vaasan Yliopisto
 Automaatio Hyvin suunniteltu on puoliksi automatisoitu (suom. sananlasku) Suuretkin systeemit saavat alkunsa pienistä siemenistä. (Seneca) Automaatiojärjestelmä havainnoi ympäristöään ja itseään, tekee
Automaatio Hyvin suunniteltu on puoliksi automatisoitu (suom. sananlasku) Suuretkin systeemit saavat alkunsa pienistä siemenistä. (Seneca) Automaatiojärjestelmä havainnoi ympäristöään ja itseään, tekee
Automaatio- ja systeemitekniikan projektityöt 2013
 Automaatio- ja systeemitekniikan projektityöt 2013 AS- 0.3200 Kahvinuuttoprosessin automaatiojärjestelmä Projektin suunnitelmadokumentti Antti Kangasrääsiö 68950W Joonas Kröger 78651M 1. Johdanto Tämän
Automaatio- ja systeemitekniikan projektityöt 2013 AS- 0.3200 Kahvinuuttoprosessin automaatiojärjestelmä Projektin suunnitelmadokumentti Antti Kangasrääsiö 68950W Joonas Kröger 78651M 1. Johdanto Tämän
Tiedonkeruu ja analysointi
 Tiedonkeruu ja analysointi ViDRoM Virtual Design of Rotating Machines Raine Viitala ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat laakerit,
Tiedonkeruu ja analysointi ViDRoM Virtual Design of Rotating Machines Raine Viitala ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat laakerit,
SÄHKÖKÄYTÖN EMULOINTI SIMULINK-DSPACE-M1 -YMPÄRISTÖSSÄ
 Sillanpää Teemu SÄHKÖKÄYTÖN EMULOINTI SIMULINK-DSPACE-M1 -YMPÄRISTÖSSÄ Seminaarityön loppuraportti, joka on jätetty tarkastettavaksi kurssin Sulautettujen järjestelmien seminaarikurssi osasuorituksena.
Sillanpää Teemu SÄHKÖKÄYTÖN EMULOINTI SIMULINK-DSPACE-M1 -YMPÄRISTÖSSÄ Seminaarityön loppuraportti, joka on jätetty tarkastettavaksi kurssin Sulautettujen järjestelmien seminaarikurssi osasuorituksena.
Tekoäly ja alustatalous. Miten voit hyödyntää niitä omassa liiketoiminnassasi
 Tekoäly ja alustatalous Miten voit hyödyntää niitä omassa liiketoiminnassasi AI & Alustatalous AI Digitaalisuudessa on 1 ja 0, kumpia haluamme olla? Alustatalouden kasvuloikka Digitaalisen alustatalouden
Tekoäly ja alustatalous Miten voit hyödyntää niitä omassa liiketoiminnassasi AI & Alustatalous AI Digitaalisuudessa on 1 ja 0, kumpia haluamme olla? Alustatalouden kasvuloikka Digitaalisen alustatalouden
Väliraportti: Vesipistekohtainen veden kulutuksen seuranta, syksy Mikko Kyllönen Matti Marttinen Vili Tuomisaari
 Väliraportti: Vesipistekohtainen veden kulutuksen seuranta, syksy 2015 Mikko Kyllönen Matti Marttinen Vili Tuomisaari Projektin eteneminen Projekti on edennyt syksyn aikana melko vaikeasti. Aikataulujen
Väliraportti: Vesipistekohtainen veden kulutuksen seuranta, syksy 2015 Mikko Kyllönen Matti Marttinen Vili Tuomisaari Projektin eteneminen Projekti on edennyt syksyn aikana melko vaikeasti. Aikataulujen
Työpajojen kysymykset, täyttöpohjat
 Työpajojen kysymykset, täyttöpohjat EVE-tutkijatyöpaja. 14.2.2013 Projekti kalvot / kysymykset niistä 1/x Tubridi / Lehmuspelto Ebussi / Lajunen Sisältääkö mallinnus ympäristöä (temp / jäähdytys puhallin)
Työpajojen kysymykset, täyttöpohjat EVE-tutkijatyöpaja. 14.2.2013 Projekti kalvot / kysymykset niistä 1/x Tubridi / Lehmuspelto Ebussi / Lajunen Sisältääkö mallinnus ympäristöä (temp / jäähdytys puhallin)
Johdatus ohjelmointiin
 Johdatus ohjelmointiin Ohjelmistot tietokonejärjestelmissä Jaana Holvikivi Ohjelmistojen tehtävät Sovellusohjelmat tekstinkäsittely ja muut toimistosovellukset kirjanpito, tuotannonohjaus selaimet, mediaohjelmat
Johdatus ohjelmointiin Ohjelmistot tietokonejärjestelmissä Jaana Holvikivi Ohjelmistojen tehtävät Sovellusohjelmat tekstinkäsittely ja muut toimistosovellukset kirjanpito, tuotannonohjaus selaimet, mediaohjelmat
ZigBee-ohjaus kuorma-autolle
 ZigBee-ohjaus kuorma-autolle Juho Frits Petteri Koivumäki 10. helmikuuta 2010 Tavoitteet Projektityössä on tavoitteena rakentaa langaton ZigBee-ohjausverkko kaukoohjattavalle kuorma-autolle (kts. Kuva
ZigBee-ohjaus kuorma-autolle Juho Frits Petteri Koivumäki 10. helmikuuta 2010 Tavoitteet Projektityössä on tavoitteena rakentaa langaton ZigBee-ohjausverkko kaukoohjattavalle kuorma-autolle (kts. Kuva
Neuroverkkojen soveltaminen vakuutusdatojen luokitteluun
 Neuroverkkojen soveltaminen vakuutusdatojen luokitteluun Sami Hokuni 12 Syyskuuta, 2012 1/ 54 Sami Hokuni Neuroverkkojen soveltaminen vakuutusdatojen luokitteluun Turun Yliopisto. Gradu tehty 2012 kevään
Neuroverkkojen soveltaminen vakuutusdatojen luokitteluun Sami Hokuni 12 Syyskuuta, 2012 1/ 54 Sami Hokuni Neuroverkkojen soveltaminen vakuutusdatojen luokitteluun Turun Yliopisto. Gradu tehty 2012 kevään
Tunnus Tehtävän nimi Kesto Aloitus Valmis
 Tunnus Tehtävän nimi Kesto Aloitus Valmis 1 Natura Mobile Projekti 741 päivää la 1.1.2011 to 31.10.2013 2 NM -automaatio 576 päivää la 1.1.2011 pe 15.3.2013 3 hankinnat 132 päivää ti 1.3.2011 ke 31.8.2011
Tunnus Tehtävän nimi Kesto Aloitus Valmis 1 Natura Mobile Projekti 741 päivää la 1.1.2011 to 31.10.2013 2 NM -automaatio 576 päivää la 1.1.2011 pe 15.3.2013 3 hankinnat 132 päivää ti 1.3.2011 ke 31.8.2011
RAKE-vastaanotinsimulaatio. 1. Työn tarkoitus. 2. Teoriaa. 3. Kytkentä. Tietoliikennelaboratorio Versio
 OAMK / Tekniikan yksikkö LABORATORIOTYÖOHJE Tietoliikennelaboratorio Versio 15.10.2004 RAKE-vastaanotinsimulaatio 1. Työn tarkoitus Tämän harjoitustyön tarkoituksena on RadioLab-simulointiohjelman avulla
OAMK / Tekniikan yksikkö LABORATORIOTYÖOHJE Tietoliikennelaboratorio Versio 15.10.2004 RAKE-vastaanotinsimulaatio 1. Työn tarkoitus Tämän harjoitustyön tarkoituksena on RadioLab-simulointiohjelman avulla
Race Technology tiedonkeruu tuotteet s2i Motorsportilta!
 Race Technology tiedonkeruu tuotteet s2i Motorsportilta! Radalle, ralliin, kadulle, vesille ja vaikka lumelle kattava valikoima GPS pohjaisia tiedonkeruu järjestelmiä, näyttöjä ja antureita autoihin, veneisiin,
Race Technology tiedonkeruu tuotteet s2i Motorsportilta! Radalle, ralliin, kadulle, vesille ja vaikka lumelle kattava valikoima GPS pohjaisia tiedonkeruu järjestelmiä, näyttöjä ja antureita autoihin, veneisiin,
Joukkueet valitsevat kumpaan arvosteluluokkaan esitys kuuluu. Tuomarit voivat myös ehdottaa joukkueelle arvosteluluokan vaihtamista.
 RoboCupJunior SM-kisat 2014 Tanssisäännöt 2014 Muutokset vuoden 2013 säännöistä merkitty punaisella. Oleellisimmat muutokset: - lisätty kohta 3.2. Robottien määrä - kohtaa 3.4. Ohjaaminen: muutettu/lisätty
RoboCupJunior SM-kisat 2014 Tanssisäännöt 2014 Muutokset vuoden 2013 säännöistä merkitty punaisella. Oleellisimmat muutokset: - lisätty kohta 3.2. Robottien määrä - kohtaa 3.4. Ohjaaminen: muutettu/lisätty
Tieto- ja viestintätekniikan opetuskäytön sisällöt, taidot ja osaaminen
 Tieto- ja viestintätekniikan opetuskäytön sisällöt, taidot ja osaaminen 1. Laitteiden, ohjelmistojen ja palveluiden hallinta (tietokoneen käyttötaidot, käyttöjärjestelmä, tutustuminen erilaisiin tietoteknisiin
Tieto- ja viestintätekniikan opetuskäytön sisällöt, taidot ja osaaminen 1. Laitteiden, ohjelmistojen ja palveluiden hallinta (tietokoneen käyttötaidot, käyttöjärjestelmä, tutustuminen erilaisiin tietoteknisiin
Elektroniikka II 2012 - lopputyön ohje
 Elektroniikka II 2012 - lopputyön ohje Yleisesti Tehtävänäsi on suunnitella elektroninen noppa, elektroninen kassakaapin lukko, sykemittari, elektroninen Braille-tulkki, morsekooderi/-dekooderi tai oma
Elektroniikka II 2012 - lopputyön ohje Yleisesti Tehtävänäsi on suunnitella elektroninen noppa, elektroninen kassakaapin lukko, sykemittari, elektroninen Braille-tulkki, morsekooderi/-dekooderi tai oma
Jukka Latva-Somppi (t1laju02), Hermanni Korkeamäki(t1kohe01), Janne Mikkola(t1mija00)
, Hermanni Korkeamäki(t1kohe01), Janne Mikkola(t1mija00)") Muistattehan, että teidän täytyy olla koululla pe 31.8. klo: 8.15 alkaen!?! AUT2SN - Jukka Latva-Somppi (t1laju02), Hermanni Korkeamäki(t1kohe01), Janne Mikkola(t1mija00) LVI2SNA - Ante Hietala(ante.hietala@hotmail.com),
Muistattehan, että teidän täytyy olla koululla pe 31.8. klo: 8.15 alkaen!?! AUT2SN - Jukka Latva-Somppi (t1laju02), Hermanni Korkeamäki(t1kohe01), Janne Mikkola(t1mija00) LVI2SNA - Ante Hietala(ante.hietala@hotmail.com),
Teknologia ja digiajan yhteisöt mahdollistajina
 Teknologia ja digiajan yhteisöt mahdollistajina Mikko Lampi Tutkimuspäällikkö, Mamk + digiaktivisti twitter @jotudin Minä, digitalisti Tutkimuspäällikkö Data, tiedonhallinta, sähköinen arkistointi Käyttäjäkokemus,
Teknologia ja digiajan yhteisöt mahdollistajina Mikko Lampi Tutkimuspäällikkö, Mamk + digiaktivisti twitter @jotudin Minä, digitalisti Tutkimuspäällikkö Data, tiedonhallinta, sähköinen arkistointi Käyttäjäkokemus,
Laaja-alainen, opiskelijalähtöinen ja projektiperusteinen opetussuunnitelma, case Monitori
 Laaja-alainen, opiskelijalähtöinen ja projektiperusteinen opetussuunnitelma, case Monitori Insinöörikoulutuksen Foorumi 2012 Seminaariesitelmä Timo Turunen ja Matti Welin Monitori koulutusalarajat ylittävä
Laaja-alainen, opiskelijalähtöinen ja projektiperusteinen opetussuunnitelma, case Monitori Insinöörikoulutuksen Foorumi 2012 Seminaariesitelmä Timo Turunen ja Matti Welin Monitori koulutusalarajat ylittävä
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt. Projektisuunnitelma. Peltorobotin akselimoduulin ohjain
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Projektisuunnitelma Peltorobotin akselimoduulin ohjain Joni Rannisto Janne Hafrén Matti Koskinen 31.1.2012 1 1. Projektin tavoite Projektin tavoitteena
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Projektisuunnitelma Peltorobotin akselimoduulin ohjain Joni Rannisto Janne Hafrén Matti Koskinen 31.1.2012 1 1. Projektin tavoite Projektin tavoitteena
Teollisuus. 606 Mekatroniikka. Lajivastaava. Timo Tommiska Koulutuskeskus Salpaus timo.tommiska(at)salpaus.fi puh. 044 708 0639.
salpaus.fi puh. 044 708 0639.") Teollisuus 606 Mekatroniikka Lajivastaava Timo Tommiska Koulutuskeskus Salpaus timo.tommiska(at)salpaus.fi puh. 044 708 0639 1 / 11 Jarmo Eloranta Koulutuskeskus Salpaus jarmo.eloranta(at)salpaus.fi puh.
Teollisuus 606 Mekatroniikka Lajivastaava Timo Tommiska Koulutuskeskus Salpaus timo.tommiska(at)salpaus.fi puh. 044 708 0639 1 / 11 Jarmo Eloranta Koulutuskeskus Salpaus jarmo.eloranta(at)salpaus.fi puh.
PLA-32820 Mobiiliohjelmointi. Mika Saari mika.saari@tut.fi http://www.students.tut.fi/~saari5/pla_32820_2016/
 PLA-32820 Mobiiliohjelmointi Mika Saari mika.saari@tut.fi http://www.students.tut.fi/~saari5/pla_32820_2016/ 1. Luento 2 Suoritus vaatimukset Kurssin sisältö Kirjallisuus Mobiiliohjelmointi Mobiililaitteita...
PLA-32820 Mobiiliohjelmointi Mika Saari mika.saari@tut.fi http://www.students.tut.fi/~saari5/pla_32820_2016/ 1. Luento 2 Suoritus vaatimukset Kurssin sisältö Kirjallisuus Mobiiliohjelmointi Mobiililaitteita...
Käyttöomaisuuden hankinnat
 HALLINTOKUNNAN HANKINTASUUNNITELMA VUOSILLE 2015 2018 Varhaiskasvatus ja opetuslautakunta Käyttöomaisuuden hankinnat erittelyt TA 2014 2015 Suunn. hankintakuukausi v. 2015 Käyttöomaisuuden hankinnat yli
HALLINTOKUNNAN HANKINTASUUNNITELMA VUOSILLE 2015 2018 Varhaiskasvatus ja opetuslautakunta Käyttöomaisuuden hankinnat erittelyt TA 2014 2015 Suunn. hankintakuukausi v. 2015 Käyttöomaisuuden hankinnat yli
T DATASTA TIETOON
 TKK / Informaatiotekniikan laboratorio Syyslukukausi, periodi II, 2007 Erkki Oja, professori, ja Heikki Mannila, akatemiaprofessori: T-61.2010 DATASTA TIETOON TKK, Informaatiotekniikan laboratorio 1 JOHDANTO:
TKK / Informaatiotekniikan laboratorio Syyslukukausi, periodi II, 2007 Erkki Oja, professori, ja Heikki Mannila, akatemiaprofessori: T-61.2010 DATASTA TIETOON TKK, Informaatiotekniikan laboratorio 1 JOHDANTO:
Intuitiivisen robotiikan ja mukautettavan modulaarisen pakkauslinjan tulevaisuus
 Intuitiivisen robotiikan ja mukautettavan modulaarisen pakkauslinjan tulevaisuus Samuli Bergström, Tuotemarkkinointipäällikkö Pingisrobottimme kykenee pitkäkestoisiin pallotteluihin ihmisvastustajaansa
Intuitiivisen robotiikan ja mukautettavan modulaarisen pakkauslinjan tulevaisuus Samuli Bergström, Tuotemarkkinointipäällikkö Pingisrobottimme kykenee pitkäkestoisiin pallotteluihin ihmisvastustajaansa
Äänellä vauhtia robottiin
 Äänellä vauhtia robottiin Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla robotti, joka väistää esteitä ja kulkee sitä nopeampaa mitä kovempi ääni sen lähistöllä on. Robotti tunnistaa esteet
Äänellä vauhtia robottiin Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla robotti, joka väistää esteitä ja kulkee sitä nopeampaa mitä kovempi ääni sen lähistöllä on. Robotti tunnistaa esteet
Tenttilista kevät 2011
 IV Periodi Pe 14.1. Pe 21.1. Pe 28.1. Pe 4.2. Pe 11.2. V Periodi Pe 18.2. Pe 25.2. Pe 4.3. Pe 11.3. Pe 18.3. Pe 25.3. VI periodi Pe 1.4. Pe 8.4. Pe 15.4. Ti 19.4. Pe 29.4. Ti 3.5. Pe 6.5. Ti 10.5. Pe 13.5.
IV Periodi Pe 14.1. Pe 21.1. Pe 28.1. Pe 4.2. Pe 11.2. V Periodi Pe 18.2. Pe 25.2. Pe 4.3. Pe 11.3. Pe 18.3. Pe 25.3. VI periodi Pe 1.4. Pe 8.4. Pe 15.4. Ti 19.4. Pe 29.4. Ti 3.5. Pe 6.5. Ti 10.5. Pe 13.5.
Täysautomatisoitu raportointiympäristö. Joni-Petteri Paavilainen Jani Alatalo
 Täysautomatisoitu raportointiympäristö Joni-Petteri Paavilainen Jani Alatalo Miksi tähän ryhdyttiin? Miten asiassa edettiin? Vaatimuksia Reaaliaikaisuus n 15 min Hallitut käyttöoikeudet Raportin tekijöillä
Täysautomatisoitu raportointiympäristö Joni-Petteri Paavilainen Jani Alatalo Miksi tähän ryhdyttiin? Miten asiassa edettiin? Vaatimuksia Reaaliaikaisuus n 15 min Hallitut käyttöoikeudet Raportin tekijöillä
FREESTYLE -TEHTÄVÄT Tehtäväkortit / 2018 Innokas 1
 FREESTYLE -TEHTÄVÄT 2018 2082018 Tehtäväkortit / 2018 Innokas 1 TEHTÄVÄ 1 KULJETUSROBOTTI TEHTÄVÄ 1 Sairaala ei selviä ilman sairaalarobottia, joka osaa liikkua sairaalan tiloissa täysin itsenäisesti 1
FREESTYLE -TEHTÄVÄT 2018 2082018 Tehtäväkortit / 2018 Innokas 1 TEHTÄVÄ 1 KULJETUSROBOTTI TEHTÄVÄ 1 Sairaala ei selviä ilman sairaalarobottia, joka osaa liikkua sairaalan tiloissa täysin itsenäisesti 1
Tuotteen hitsattavuuden testaus robottisimulointiohjelmalla. Kari Solehmainen Savonia Ammattikorkeakoulu HitSavonia
 Tuotteen hitsattavuuden testaus robottisimulointiohjelmalla Kari Solehmainen Savonia Ammattikorkeakoulu HitSavonia Sisältö Yhtenäissuunnittelu (Concurrent engineering) Mallinnus ja simulointi Robottihitsauksen
Tuotteen hitsattavuuden testaus robottisimulointiohjelmalla Kari Solehmainen Savonia Ammattikorkeakoulu HitSavonia Sisältö Yhtenäissuunnittelu (Concurrent engineering) Mallinnus ja simulointi Robottihitsauksen
Koodaamme uutta todellisuutta FM Maarit Savolainen https://blog.edu.turku.fi/matikkaajakoodausta/
 Koodaamme uutta todellisuutta FM Maarit Savolainen 19.1.2017 https://blog.edu.turku.fi/matikkaajakoodausta/ Mitä on koodaaminen? Koodaus on puhetta tietokoneille. Koodaus on käskyjen antamista tietokoneelle.
Koodaamme uutta todellisuutta FM Maarit Savolainen 19.1.2017 https://blog.edu.turku.fi/matikkaajakoodausta/ Mitä on koodaaminen? Koodaus on puhetta tietokoneille. Koodaus on käskyjen antamista tietokoneelle.
Robotiikka. Vahvat alumiiniosat, anodisoitu pinta. Kilpivirrantie 7, Iisalmi, Puh , Fax
 Robotiikka 2 Robotiikka 91704 Starter Robot Kit-Blue (IR versio) 150,50 Starter Robot Kit robotiikan opetussarja infrapunaohjauksella. Tämä rakennussarja on erinomainen valinta sellaiselle, joka haluaa
Robotiikka 2 Robotiikka 91704 Starter Robot Kit-Blue (IR versio) 150,50 Starter Robot Kit robotiikan opetussarja infrapunaohjauksella. Tämä rakennussarja on erinomainen valinta sellaiselle, joka haluaa
FYSP101/K1 KINEMATIIKAN KUVAAJAT
 FYSP101/K1 KINEMATIIKAN KUVAAJAT Työn tavoitteita tutustua kattavasti DataStudio -ohjelmiston käyttöön syventää kinematiikan kuvaajien (paikka, nopeus, kiihtyvyys) hallintaa oppia yhdistämään kinematiikan
FYSP101/K1 KINEMATIIKAN KUVAAJAT Työn tavoitteita tutustua kattavasti DataStudio -ohjelmiston käyttöön syventää kinematiikan kuvaajien (paikka, nopeus, kiihtyvyys) hallintaa oppia yhdistämään kinematiikan
 Jukka Varsaluoma Mikä ihmeen haaste? Global Game Jam http://globalgamejam.org/ http://2013.globalgamejam.org/games/2013 Ludum Dare http://www.ludumdare.com/ http://www.ludumdare.com/compo/ludum-dare-27/?action=top
Jukka Varsaluoma Mikä ihmeen haaste? Global Game Jam http://globalgamejam.org/ http://2013.globalgamejam.org/games/2013 Ludum Dare http://www.ludumdare.com/ http://www.ludumdare.com/compo/ludum-dare-27/?action=top
AS Automaatio- ja systeemitekniikan projektityöt Väliraportti
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Väliraportti PiccSIM - TrueTime integrointi Henri Öhman 21.3.2012 1. Projektityön tavoite PiccSIM on Aalto-yliopistolla kehitetty simulointiympäristö,
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Väliraportti PiccSIM - TrueTime integrointi Henri Öhman 21.3.2012 1. Projektityön tavoite PiccSIM on Aalto-yliopistolla kehitetty simulointiympäristö,
Alatunniste
 1 I NTERNET OF THINGS = ESINEIDEN INTERNET Alatunniste 2 MIKÄ ON IOT/EIT? Internet of things Esineiden internet Määritelmä Jokainen sähköä käyttävä laite joka on kytketty verkkoon Jokaisella on oma osoitteensa
1 I NTERNET OF THINGS = ESINEIDEN INTERNET Alatunniste 2 MIKÄ ON IOT/EIT? Internet of things Esineiden internet Määritelmä Jokainen sähköä käyttävä laite joka on kytketty verkkoon Jokaisella on oma osoitteensa
KONETEKNIIKAN KOULUTUSOHJELMA MONIKAPPALEDYNAMIIKAN OHJELMISTOT. Joonas Kääriäinen
 KONETEKNIIKAN KOULUTUSOHJELMA MONIKAPPALEDYNAMIIKAN OHJELMISTOT Joonas Kääriäinen KANDIDAATINTYÖ 2016 Ohjaaja: Yrjö Louhisalmi TIIVISTELMÄ Monikappaledynamiikan ohjelmistot Joonas Kääriäinen Oulun yliopisto,
KONETEKNIIKAN KOULUTUSOHJELMA MONIKAPPALEDYNAMIIKAN OHJELMISTOT Joonas Kääriäinen KANDIDAATINTYÖ 2016 Ohjaaja: Yrjö Louhisalmi TIIVISTELMÄ Monikappaledynamiikan ohjelmistot Joonas Kääriäinen Oulun yliopisto,
Perinteiset tietokoneohjelmat alkavat pääohjelmasta, c:ssä main(), jossa edetään rivi riviltä ja käsky käskyltä.
, jossa edetään rivi riviltä ja käsky käskyltä.") TIETOKONEOHJELMIEN RAKENNE Perinteiset tietokoneohjelmat alkavat pääohjelmasta, c:ssä main(), jossa edetään rivi riviltä ja käsky käskyltä. Teollisuusautomaation ohjelmiin on lainattu runsaasti perinteisen
TIETOKONEOHJELMIEN RAKENNE Perinteiset tietokoneohjelmat alkavat pääohjelmasta, c:ssä main(), jossa edetään rivi riviltä ja käsky käskyltä. Teollisuusautomaation ohjelmiin on lainattu runsaasti perinteisen
Simulaattoreiden ja virtuaalitodellisuuden hyödyntäminen metsäalalla. Antti Peltola, Creanex Oy
 Simulaattoreiden ja virtuaalitodellisuuden hyödyntäminen metsäalalla Antti Peltola, Creanex Oy Creanex Oy Käsitteitä; VR Keino-eli virtuaalitodellisuus on tietokoneavusteisin menetelmin totetutettu ympäristö,
Simulaattoreiden ja virtuaalitodellisuuden hyödyntäminen metsäalalla Antti Peltola, Creanex Oy Creanex Oy Käsitteitä; VR Keino-eli virtuaalitodellisuus on tietokoneavusteisin menetelmin totetutettu ympäristö,
Mekatroniikan tutkimusverkoston kehittäminen Raumalla, METURA
 3.12.2015 1 Mekatroniikan tutkimusverkoston kehittäminen Raumalla, METURA 2 3 Mekatroniikka? Mekatroniikka tulee sanoista mekaniikka ja elektroniikka. Mekatroniikka termi keksittiin Japanissa 1970-luvulla,
3.12.2015 1 Mekatroniikan tutkimusverkoston kehittäminen Raumalla, METURA 2 3 Mekatroniikka? Mekatroniikka tulee sanoista mekaniikka ja elektroniikka. Mekatroniikka termi keksittiin Japanissa 1970-luvulla,
Elektroniikkalajin semifinaalitehtävien kuvaukset
 Elektroniikkalajin semifinaalitehtävien kuvaukset Kilpailija rakentaa ja testaa mikrokontrollerilla ohjattavaa jännitereferenssiä hyödyntävän sovelluksen. Toteutus koostuu useasta elektroniikkamoduulista.
Elektroniikkalajin semifinaalitehtävien kuvaukset Kilpailija rakentaa ja testaa mikrokontrollerilla ohjattavaa jännitereferenssiä hyödyntävän sovelluksen. Toteutus koostuu useasta elektroniikkamoduulista.
A11-02 Infrapunasuodinautomatiikka kameralle
 A11-02 Infrapunasuodinautomatiikka kameralle Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo Sisällysluettelo 1. Projektityön tavoite
A11-02 Infrapunasuodinautomatiikka kameralle Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo Sisällysluettelo 1. Projektityön tavoite
Lemminkäinen Infra oy. Lämpökameravertailu PIR ELY Kuru-Parkano
 Lemminkäinen Infra oy Lämpökameravertailu PIR ELY 1 2017 Kuru-Parkano PIR ELY 1 2017 Kuru-Parkano - Urakassa koekäytössä oli Moban infrapunaskannerijärjestelmä Pave-IR, jota vertailtiin Roadscanners Lämpökameraan.
Lemminkäinen Infra oy Lämpökameravertailu PIR ELY 1 2017 Kuru-Parkano PIR ELY 1 2017 Kuru-Parkano - Urakassa koekäytössä oli Moban infrapunaskannerijärjestelmä Pave-IR, jota vertailtiin Roadscanners Lämpökameraan.
Kiinnostaako koodaus ja robotiikka?
 Kiinnostaako koodaus ja robotiikka? Innokas-verkosto Innovatiivisen koulun toiminnan kehittäminen ja levittäminen Suomi Yli 200 koulua Kouluja, kirjastoja, päiväkoteja, nuorisotyö, yliopistoja, yrityksiä
Kiinnostaako koodaus ja robotiikka? Innokas-verkosto Innovatiivisen koulun toiminnan kehittäminen ja levittäminen Suomi Yli 200 koulua Kouluja, kirjastoja, päiväkoteja, nuorisotyö, yliopistoja, yrityksiä
Muokkaa tekstin perustyylejä napsauttamalla
 Muokkaa tekstin perustyylejä Digitalisaatio ja Teollinen Internet konepajateollisuudessa Teollinen Internet & Digitalisaatio 2015 18.11.2015 Kimmo Jaakkonen, Absent Oy Absent Oy Muokkaa tekstin perustyylejä
Muokkaa tekstin perustyylejä Digitalisaatio ja Teollinen Internet konepajateollisuudessa Teollinen Internet & Digitalisaatio 2015 18.11.2015 Kimmo Jaakkonen, Absent Oy Absent Oy Muokkaa tekstin perustyylejä
Tarjoussuunnitteluun työkalu
 Aleksi Heimovesa, Iiro Hakkarainen, Jesse Honko Tarjoussuunnitteluun työkalu Metropolia Ammattikorkeakoulu Kone- ja tuotantotekniikka Projektisuunnitelma 16.1.2015 Sisällys 1 Johdanto 1 2 Projektin tavoitteet
Aleksi Heimovesa, Iiro Hakkarainen, Jesse Honko Tarjoussuunnitteluun työkalu Metropolia Ammattikorkeakoulu Kone- ja tuotantotekniikka Projektisuunnitelma 16.1.2015 Sisällys 1 Johdanto 1 2 Projektin tavoitteet
Perusopetuksen robotiikan opetussuunnitelma ja sen toimeenpano Riihimäellä
 Perusopetuksen robotiikan opetussuunnitelma ja sen toimeenpano Riihimäellä ITK 2018 Hämeenlinna Aulanko 13.4.2018 Esa Santakallio; sivistysjohtaja Reetta Viitanen, luokanopettaja Jeremiah Allerd, Harjunrinteen
Perusopetuksen robotiikan opetussuunnitelma ja sen toimeenpano Riihimäellä ITK 2018 Hämeenlinna Aulanko 13.4.2018 Esa Santakallio; sivistysjohtaja Reetta Viitanen, luokanopettaja Jeremiah Allerd, Harjunrinteen
Projektisuunnitelma. Projektin tavoitteet
 Projektisuunnitelma Projektin tavoitteet Projektin tarkoituksena on tunnistaa erilaisia esineitä Kinect-kameran avulla. Kinect-kamera on kytkettynä tietokoneeseen, johon projektissa tehdään tunnistuksen
Projektisuunnitelma Projektin tavoitteet Projektin tarkoituksena on tunnistaa erilaisia esineitä Kinect-kameran avulla. Kinect-kamera on kytkettynä tietokoneeseen, johon projektissa tehdään tunnistuksen
Miten ja mistä tietoa kasvin kunnosta kasvukauden aikana? Mtech Digital Solutions Oy Mikko Hakojärvi
 Miten ja mistä tietoa kasvin kunnosta kasvukauden aikana? Mtech Digital Solutions Oy Mikko Hakojärvi 17.4.2018 Missio Edistää asiakkaiden toimintatapojen ja kilpailukyvyn jatkuvaa kehittymistä digitaalisilla
Miten ja mistä tietoa kasvin kunnosta kasvukauden aikana? Mtech Digital Solutions Oy Mikko Hakojärvi 17.4.2018 Missio Edistää asiakkaiden toimintatapojen ja kilpailukyvyn jatkuvaa kehittymistä digitaalisilla
AIVOHALVAUS - tiedä, tunnista, kuntoudu
 Hyvinvointialan asiantuntijaseminaari 9.12.2010 Mikkeli Helvi Janhunen Projektisuunnittelija Etelä-Savon sairaanhoitopiiri Altti-projekti AIVOHALVAUS - tiedä, tunnista, kuntoudu TULEVAISUUDEN VISIO Etelä-Savoon
Hyvinvointialan asiantuntijaseminaari 9.12.2010 Mikkeli Helvi Janhunen Projektisuunnittelija Etelä-Savon sairaanhoitopiiri Altti-projekti AIVOHALVAUS - tiedä, tunnista, kuntoudu TULEVAISUUDEN VISIO Etelä-Savoon
Power Steering for ATV
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Power Steering for ATV 15.1. - Loppuraportti Työn valvoja: Ville Matikainen Projektin tekijät: Juuso Meriläinen Antti Alakiikonen Aleksi Vulli Juuso
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Power Steering for ATV 15.1. - Loppuraportti Työn valvoja: Ville Matikainen Projektin tekijät: Juuso Meriläinen Antti Alakiikonen Aleksi Vulli Juuso
24.9.2015. Työasema- ja palvelinarkkitehtuurit (IC130301) Apumuistit. Kiintolevyt. 5 opintopistettä. Petri Nuutinen
 Apumuistit. Kiintolevyt. 5 opintopistettä. Petri Nuutinen") Työasema- ja palvelinarkkitehtuurit (IC130301) 5 opintopistettä Petri Nuutinen 5 opintopistettä Petri Nuutinen Apumuistit Tarvitaan ohjelmien ja dokumenttien tallentamiseen, kiintolevyjen varmuuskopiointiin,
Työasema- ja palvelinarkkitehtuurit (IC130301) 5 opintopistettä Petri Nuutinen 5 opintopistettä Petri Nuutinen Apumuistit Tarvitaan ohjelmien ja dokumenttien tallentamiseen, kiintolevyjen varmuuskopiointiin,
Toinen harjoitustyö. ASCII-grafiikkaa
 Toinen harjoitustyö ASCII-grafiikkaa Yleistä Tehtävä: tee Javalla ASCII-merkkeinä esitettyä grafiikkaa käsittelevä ASCIIArt-ohjelma omia operaatioita ja taulukoita käyttäen. Työ tehdään pääosin itse. Ideoita
Toinen harjoitustyö ASCII-grafiikkaa Yleistä Tehtävä: tee Javalla ASCII-merkkeinä esitettyä grafiikkaa käsittelevä ASCIIArt-ohjelma omia operaatioita ja taulukoita käyttäen. Työ tehdään pääosin itse. Ideoita
Ookko verkossa- hanke Hirvasen Mustikka- eskarissa 2013-2015
 Ookko verkossa- hanke Hirvasen Mustikka- eskarissa 2013-2015 Ookko verkossa- hanke käynnistyi keväällä 2013 Uuraisilla! Hankkeen alussa meillä oli välineinä päiväkodin kannettava tietokone sekä Huomasimme
Ookko verkossa- hanke Hirvasen Mustikka- eskarissa 2013-2015 Ookko verkossa- hanke käynnistyi keväällä 2013 Uuraisilla! Hankkeen alussa meillä oli välineinä päiväkodin kannettava tietokone sekä Huomasimme
Kertausluento luennoista 1-3 1
 Kertausluento 1 (lu01, lu02, lu03) Tietokonejärjestelmän rakenne ttk-91 ja sillä ohjelmointi Järjestelmän eri tasot Laitteiston nopeus ttk-91 rakenne ja käskykantaarkkitehtuuri Konekielinen ohjelmointi
Kertausluento 1 (lu01, lu02, lu03) Tietokonejärjestelmän rakenne ttk-91 ja sillä ohjelmointi Järjestelmän eri tasot Laitteiston nopeus ttk-91 rakenne ja käskykantaarkkitehtuuri Konekielinen ohjelmointi
AS Automaatio- ja systeemitekniikan projektityöt - Projektisuunnitelma
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt - Projektisuunnitelma PiccSIM - TrueTime integrointi Henri Öhman 31.1.2012 1. Projektityön tavoite PiccSIM on Aalto-yliopistolla kehitetty simulointiympäristö,
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt - Projektisuunnitelma PiccSIM - TrueTime integrointi Henri Öhman 31.1.2012 1. Projektityön tavoite PiccSIM on Aalto-yliopistolla kehitetty simulointiympäristö,
Verkkokurssien hyödyntäminen yritysten sisäisessä koulutuksessa. Jari Soini TTY Porin yksikkö
 Verkkokurssien hyödyntäminen yritysten sisäisessä koulutuksessa Jari Soini TTY Porin yksikkö 7.11.2018 JOKO HYÖDYNNÄTTE VERKKOKURSSEJA? 2 Digiajan avoimet koulutukset myös satakuntalaisten yritysten käyttöön
Verkkokurssien hyödyntäminen yritysten sisäisessä koulutuksessa Jari Soini TTY Porin yksikkö 7.11.2018 JOKO HYÖDYNNÄTTE VERKKOKURSSEJA? 2 Digiajan avoimet koulutukset myös satakuntalaisten yritysten käyttöön
Projekti A: iskunvaimennindynamometri
 Projekti A: iskunvaimennindynamometri PROJEKTISUUNNITELMA Tekijät: Mälkönen Joonas Orhanen Samppa Pajula Matti Forsström Niko 83D 838C 8757V 8830U Nurminen Tuomas Päiväys: 5.3. Kon-6.08 Ajoneuvojen tuotekehitys
Projekti A: iskunvaimennindynamometri PROJEKTISUUNNITELMA Tekijät: Mälkönen Joonas Orhanen Samppa Pajula Matti Forsström Niko 83D 838C 8757V 8830U Nurminen Tuomas Päiväys: 5.3. Kon-6.08 Ajoneuvojen tuotekehitys
Metrobots-2012 Kick-off. Anssi Ikonen Kimmo Saurén Pasi Lankinen
 Metrobots-2012 Kick-off Anssi Ikonen Kimmo Saurén Pasi Lankinen Esittely Tuotekehitysprojekti, jossa Toimitaan ryhmässä suunnitellusti Jokaisella ryhmän jäsenellä on etukäteen suunniteltu tehtävänsä Elektroniikka,
Metrobots-2012 Kick-off Anssi Ikonen Kimmo Saurén Pasi Lankinen Esittely Tuotekehitysprojekti, jossa Toimitaan ryhmässä suunnitellusti Jokaisella ryhmän jäsenellä on etukäteen suunniteltu tehtävänsä Elektroniikka,
kertaa samat järjestykseen lukkarissa.
 Opetuksen toistuva varaus ryhmällee TY10S11 - Tästä tulee pitkä esimerkki, sillä pyrin nyt melko yksityiskohtaisesti kuvaamaan sen osion mikä syntyy tiedon hakemisesta vuosisuunnittelusta, sen tiedon kirjaamiseen
Opetuksen toistuva varaus ryhmällee TY10S11 - Tästä tulee pitkä esimerkki, sillä pyrin nyt melko yksityiskohtaisesti kuvaamaan sen osion mikä syntyy tiedon hakemisesta vuosisuunnittelusta, sen tiedon kirjaamiseen
Simulaatio-opetuksen laajaalaisuus: Lähitulevaisuuden haasteet raskaan kaluston simulaatioopetuksessa.
 Simulaatio-opetuksen laajaalaisuus: Lähitulevaisuuden haasteet raskaan kaluston simulaatioopetuksessa. Haasteet Simulaattori laitteena ei ratkaise koulutushaasteita itse asiassa se voi tuoda niitä lisää.
Simulaatio-opetuksen laajaalaisuus: Lähitulevaisuuden haasteet raskaan kaluston simulaatioopetuksessa. Haasteet Simulaattori laitteena ei ratkaise koulutushaasteita itse asiassa se voi tuoda niitä lisää.
Ryhmätoiminnan menetelmäopas Aikuissosiaalityön päivä 21.5.2013. Minna Latonen Hilla-Maaria Sipilä
 Ryhmätoiminnan menetelmäopas Aikuissosiaalityön päivä 21.5.2013 Minna Latonen Hilla-Maaria Sipilä Nuorten Kipinä -kehittämisryhmä Tausta Hankkeiden (Ester, Koppi, sähköinen asiointi) yhteiset tavoitteet
Ryhmätoiminnan menetelmäopas Aikuissosiaalityön päivä 21.5.2013 Minna Latonen Hilla-Maaria Sipilä Nuorten Kipinä -kehittämisryhmä Tausta Hankkeiden (Ester, Koppi, sähköinen asiointi) yhteiset tavoitteet
Kurssin esittely. Kurssin esittely. MS-C2107 Sovelletun matematiikan tietokonetyöt 1
 Kurssin esittely MS-C2107 Sovelletun matematiikan tietokonetyöt MS-C2107 Sovelletun matematiikan tietokonetyöt 1 Opettajat Tuntiopettaja Anna Anttalainen (BIO). Harrastuksia kiltatoiminta ja bodypump.
Kurssin esittely MS-C2107 Sovelletun matematiikan tietokonetyöt MS-C2107 Sovelletun matematiikan tietokonetyöt 1 Opettajat Tuntiopettaja Anna Anttalainen (BIO). Harrastuksia kiltatoiminta ja bodypump.
AS Automaation käyttöliittymät L Opetussuunnitelma
 Automaation käyttöliittymät L Opetussuunnitelma Kevät 2008 Perustiedot Opintopistemäärä Luentojen ja harjoitustyön ohjaustilaisuuksien määrä /suorittaminen: Opettajat 3op 6 + 4 4. Periodi TkT (Luennot)
Automaation käyttöliittymät L Opetussuunnitelma Kevät 2008 Perustiedot Opintopistemäärä Luentojen ja harjoitustyön ohjaustilaisuuksien määrä /suorittaminen: Opettajat 3op 6 + 4 4. Periodi TkT (Luennot)