TIES530 TIES530. A/D-muuntimet. Mikrokontrollerit - arkkitehtuuri. Mikrokontrollerit - arkkitehtuuri. A/D- ja D/A-muuntimet
|
|
|
- Pauliina Haavisto
- 9 vuotta sitten
- Katselukertoja:
Transkriptio
1 A/D-muuntimet A/D- ja D/A-muuntimet Mikäli mikroprosessorissa halutaan käyttää analogista jännitetietoa, signaali on vietävä ensin A/D-muuntimelle, joka muuttaa sen digitaaliseen muotoon. D/Amuuntimella tehdään sama käänteisessä järjestyksessä. A/D-muuntimen käyttö on tarpeen liitettäessä esimerkiksi analogisia antureita järjestelmään ja aina käsiteltäessä analogisia signaaleja DSP-prosessorilla. A/D-muunnin löytyy nykyisin monista mikrokontrollereista valmiiksi piiriin integroituna. Vaikkakaan se ei kuulu perus-8051:een, niin esimerkiksi AVRperheen piireistä se monesti löytyy. Piirin sisään integroiduissa A/D-muuntimissa on eroja ja valintakriteereinä ovat ainakin Kanavien lukumäärä A/D-muunnoksen nopeus Monellako bitillä muunnos tehdään (resoluutio)

2 A/D- ja D/A-muuntimet Kanavien lukumäärä Vaikka piirissä olisi vain yksi A/D-muunnin, muunnos voidaan tehdä kuitenkin usealle kanavalle (tulolle) käyttämällä multipleksointia. Siinä A/D-muuntimelle kytketään yksi kanava kerrallaan ja analoginen signaali tallennetaan pitopiiriin (sample and hold). A/D- ja D/A-muuntimet A/D-muunnoksen nopeus Muunnos vie aina aikaa. Tyypillisesti aika lasketaan mikrosekunneissa. (Esim. ATMega128: µs ) Resoluutio Mitä useammalla bitillä mittauksen tulos voidaan ilmoittaa, sitä tarkempi tieto signaalista on käytettävissä. Esimerkiksi 10-bittinen muunnin jakaa signaalin 1024 eri tasoon. Verrattuna esim. 8-bittiseen muunnokseen päästään nelinkertaiseen tarkkuuteen. Kohinaisissa mittauksissa virheitä keskiarvoistus. A/D- ja D/A-muunnoksessa on aina kyse suhteellisesta arvosta. V V in fullscale X 2 1 = n

3 A/D- ja D/A-muuntimet Referenssijännite Referenssijännite (vertailujännite) on maksimiarvo, jonne A/D-muunnos ulottuu. Esim. 10-bittisellä muuntimella referenssijännite 3.6V tuottaa jokaisen askeleen suuruudeksi Vertailujännite 3.6V = = 3.52mV A/D-muuntimen tarkkuus ei voi suurempi kuin referenssijännitteen tarkkuus. Esimerkiksi zenerillä vakioidun referenssijännitteen tarkkuus = zener-diodin toleranssi. Monesti kontrollerissa voidaan valita käytetäänkö vertailujännitteenä käyttöjännitettä vai piirin ulkopuolista vertailujännitettä. A/D- ja D/A-muuntimet Esimerkki 10-bittisellä A/D-muuntimella referenssijännitteenä käytetään 5V:n käyttöjännitettä. Muuntimelle tuotu 3V:n jännitetaso muunnetaan digitaaliseksi lukuarvoksi Tulojännite Vertailujännite 3V * 2 10 = * D = 266 5V H Käyttöjännitteen tarkkuus vaikuttaa tässäkin laskettuun muunnosarvoon. A/D-muunnin ei ole ideaalinen vaan muunnoksessa yleensä mukana lineaarisuusvirhettä.

4 Esimerkkinä ATMega128:n A/Dmuunnin 10-bittinen muunnin näytettä sekunnissa 8 analogista kanavaa Muunnosnopeus säädettävissä esijakajalla. Karkeampi muunnos nopeammin. Esimerkkinä ATMega128:n A/D-muunnin ADC Control and Status Register ADCSR ADC Multiplexer Select Register ADMUX ADC Data Register ADCL and ADCH

5 Esimerkkinä ATMega128:n A/D-muunnin Esimerkkinä 8051-piirimuunnos AT89C51SND1C / A/D-muunnin MP3-soittimiin tarkoitettu suoritin, johon integroituna mm. 10-bittinen A/Dmuunnin. Piiri on Atmelin valmistama AT89C51SND1C.

6 PWM Pulse Width Modulation PWM Pulssinleveysmodulaatiossa informaatio on koodattu pulssin leveyteen, joka voi olla % jakson ajasta (pulssisuhde). Mikrokontrollerilla ohjattuja pulssisuhdevaihtoehtoja on rajallinen määrä. Mahdollisten pulssisuhteiden lukumäärä = resoluutio. Pulssinleveysmodulaatiolla voidaan tuottaa myös edullinen D/A-muunnos, kun kovin suuri tarkkuus ei ole tärkeää. Pulssia voidaan esim. suodattaa hitaalla RCpiirillä ja käyttää esim. valojen himmentimissä. Pulssinleveysmodulaatiolla voidaan myös ohjata esim. tasavirtamoottoria, joka hitautensa vuoksi ei pysty reagoimaan pulsseihin nopeasti. Kuvissa on esimerkki 30% ja 90% pulssisuhteista moduloidussa signaalissa.

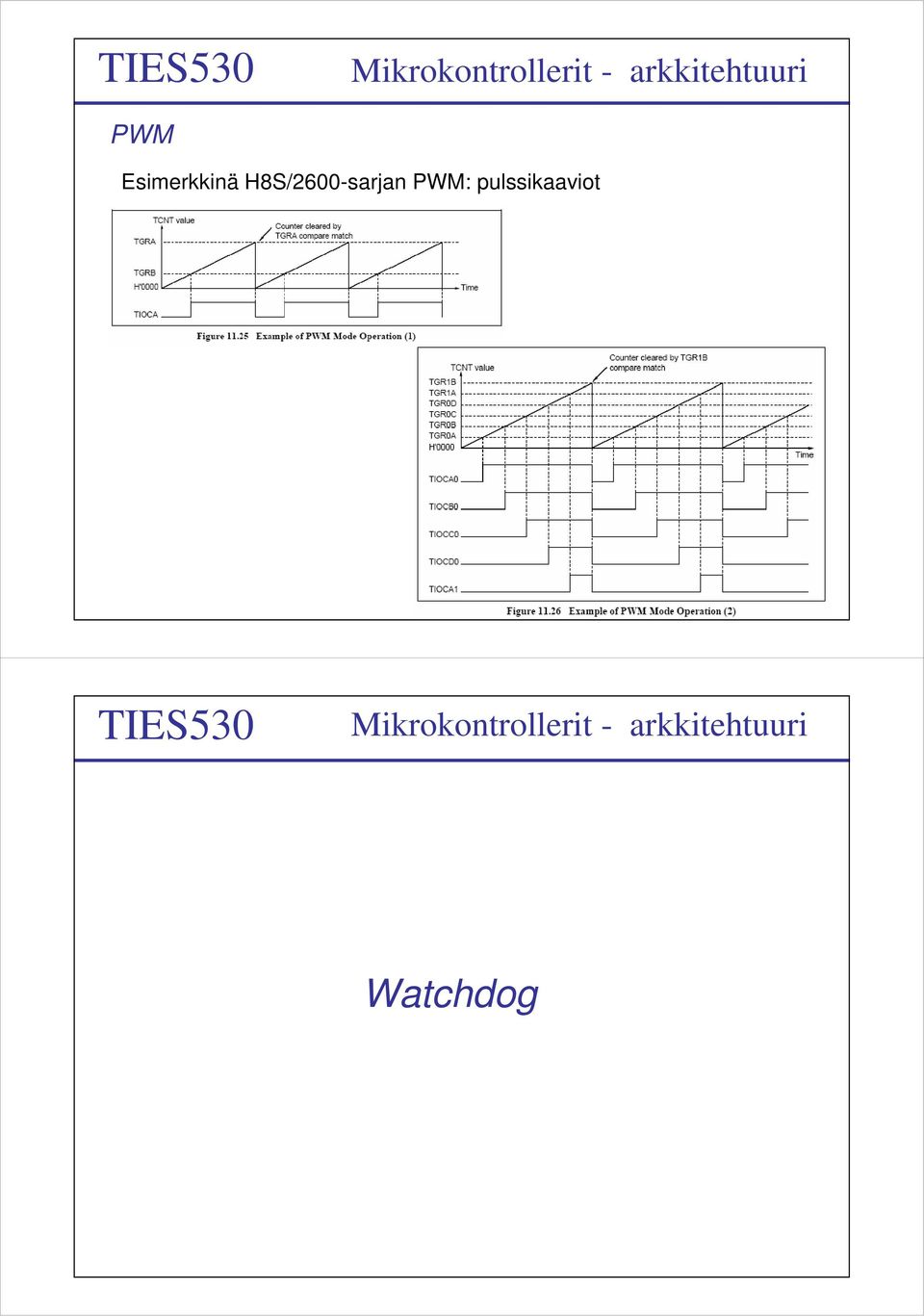
7 PWM Esimerkkinä Atmelin AtMega128:n PWM PWM Esimerkkinä H8S/2600-sarjan PWM: lohkokaavio

8 PWM Esimerkkinä H8S/2600-sarjan PWM: pulssikaaviot Watchdog
9 Watchdog Watchdog on yleinen kontrollereihin valmiiksi integroitu piiri, jolla voidaan varmistaa se, ettei ohjelman suoritus jää jumiin. Sulautettujen järjestelmien ohjelmisto on tyypillisesti jokin sekvenssi, jota ajetaan ikuisessa silmukassa. Käytettäessä watchdog:ia silmukassa käydään normaalisti päivittämässä watchdog:in rekisteriä. Jos ohjelma kuitenkin jostain syystä juuttuu jonnekin eikä watchdog tule päivitettyä, se hoitaa automaattisesti ohjelman resetoinnin ja ohjelman suoritus alkaa alusta. Watchdog muodostuu esim. kellopulsseja laskevasta laskurista. Mikäli laskuri pyörähtää ympäri, suoritetaan piirin resetointi. Yleensä laskurin laskentanopeutta voidaan säädellä konfiguroimalla watchdogin rekistereitä (esijakaja), jolloin päästään haluttuihin viiveisiin. Yleensä kuitenkaan ei voida käyttää monen sekunnin viiveitä, vaan tyypillisesti Watchdogin toimintaaika on maksimissaan joitakin satoja millisekunteja. Watchdog on erityisen tärkeää niissä soveluksissa, joissa laitteen toiminta on pystyttävä takaamaan aina luotettavasti. Samoin jos laite altistuu sähköhäiriöille, tai käyttäjä ei voi huolehtia laitteen toimintakunnosta. Esimerkkinä CC2430:n watchdog Pseudokoodi: select watchdog mode enable watchdog timer (= set WDCTL.EN) while (1) //clear watchdog timer write 0xA0 into WDCTL register write 0x50 into WDCTL register end

10 Reaaliaikakello Reaaliaikakello Monesti sulautetuissakin järjestelmissä tarvitaan jonkinlaista aikalaskuria. Kellon ja kalenterin voi toteuttaa ohjelmallisestikin, mikäli laite saa sähkökatkon jälkeen oikean kellonajan ulkopuolelta. Mikäli laite toimii yksinään, on reaaliaikakello toteutettava kovossa. Tämä edellyttää katkeamatonta virransyöttöä silloinkin, kun laite muutoin ehkä ei ole toiminnassa. Reaaliaikakellon jännitelähteenä on yleensä paristo tai akku. Jopa kondensaattoria voidaan käyttää, koska reaaliaikakello kuluttaa äärimmäisen vähän virtaa. Reaaliaikakello sisältää kideoskillaattorin ja useamman peräkkäisen laskurin, joilla ajan kulumista seurataan. Tyypillisiä käyttökohteita reaaliaikakellolle ovat erilaiset kulutuselektroniikan laitteet ja kiinteistön valvontaan liittyvät järjestelmät. Seuraavassa kuvassa on esitetty periaatteellinen rakenne. Ulkoiset liitännät ovat kiteelle ja jännitelähteelle ja sisäisiin rekistereihin päivitetään kellon ja päivyrin tietoja. Lisäksi käytettävissä voi olla oma pieni SRAM-muistialue kuvan mukaan.

11 Reaaliaikakello Kuva: Jari Koskinen, Mikrotietokonetekniikka Sulautetut Järjestelmät. Tiedonsiirtoväylistä

12 Tiedonsiirtoväylistä Kontrollerin sisällä tietoa siirretään yleensä rinnakkaismuodossa. Samoin, kun etäisyys liitäntäpiirille on hyvin lyhyt (esim. ulkoiset muistit). Usein mikrokontrolleriin liitetään kuitenkin oheispiirejä myös erilaisten sarjaliikenneprotokollien avulla. Jo käsitellyn UART:n lisäksi yleisimpiä menetelmiä ovat SPI, I2C, 1-wire,CAN. Sarjaliikennöinnin etuna on vähäisempi liitäntälinjojen määrä. Väyläratkaisut ovat talaudellisia, jos monen laitteen on kommunikoitava toistensa kanssa. I2C-väylä (Inter-Integrated Circuit bus) Melko yleinen liitäntä kontrollereissa. Philips Semiconductors kehitti I2C-väylän 1980-luvun alussa. I2C on tarkoitettu alun perin liittämään oheislaitteita mikro-ohjaimeen TVvastaanottimissa. Käytetään myös nimityksiä IIC ja I²C. Käytetään liittämään komponentteja, kuten näyttö, näppäimistö, muistit ym. kontrolleriin. I2C-väylällä voidaan helposti liittää erillisiä yksiköitä toisiinsa ja väylästä voidaan tarvittaessa myös poistaa yksiköitä. Järjestelmästä tulee helposti laajennettava ja kaksijohtimisena se on edullinen ja helppo väyläratkaisu. Liitettävät yksiköt eivät ole myöskään riippuvaisia kontrolleritoteutuksesta. Vianhakua ja testausta voidaan tehdä lohko kerrallaan. Esimerkkinä TV-vastaanottimen muutaman merkin näyttö ja näppäimistö voi olla I2C-väylän kautta kiinni kontrollerissa, joka sijaitsee eri piirilevyllä.
 Melko yleinen liitäntä kontrollereissa. Philips Semiconductors kehitti I2C-väylän 1980-luvun alussa.")
13 I2C-väylä (Inter-Integrated Circuit bus) I2C-väylä soveltuu hyvin 8-bittisten mikro-ohjainten kommunikointiväyläksi, koska tieto väylällä siirtyy 8-bittisenä. Tiedonsiirtonopeus on 100 Kb/s (normaali moodi) tai 400 Kb/s (nopea moodi). Väylällä voi olla kahdenlaisia laitteita, master- ja slave-laitteita. Master voi aloittaa tiedonsiirron, slave ei. Molemmat voivat kuitenkin sekä lähettää että vastaanottaa dataa. Väylällä on törmäyksien tunnistus (collision detection), siltä varalta että useampi laite yrittää lähettää samanaikaisesti. Jokaisella I2C-väylään liittyvällä laitteella täytyy olla oma yksikäsitteinen osoitteensa. Osoiteavaruus on yleensä 7-bittinen (joskus 10-bittinen). Sähköisesti väylään liitettäville laitteille on määrätty suurin mahdollinen kuormituskapasitanssi 400 pf. Sinänsä liitettävien oheislaitteiden valmistustekniikkaa ei ole rajoitettu. I2C-väylä (Inter-Integrated Circuit bus)
.")
14 I2C-väylä (Inter-Integrated Circuit bus) Piirien kytkeytyminen I2C-väylään: Sekä SDA- että SCL-linjat on kytketty positiiviseen jännitteeseen. Kun väylä on vapaa, linjat ovat ylätilassa, mutta jos jokin lähtö menee alatilaan, se vetää koko linjan alatilaan. I2C-väylä (Inter-Integrated Circuit bus) I2C Väyläprotokolla I2C on synkroninen kaksisuuntainen väylä, joka koostuu maatason lisäksi signaaleista SDA (Serial Data Line) kaksisuuntainen linja dataa varten SCL (Serial Clock Line) kaksisuuntainen linja tahdistusta varten Kaikilla väylään liitetyillä laitteilla on oma osoitteensa ja jokainen laitteista voi periaatteessa toimia lähettävänä ja vastaanottavana osapuolena. I2C-väylässä voi olla yhtä aikaa monta master-laitetta (multi-master bus) ja vain master-laitteet voivat aloittaa kommunikoinnin. Tiedonsiirto Tiedonsiirto aloitetaan niin, että Master-laite käynnistää lähetyksen STARTehdolla. Tämän jälkeen väylä on varattu aina siihen saakka kunnes Master-laite lähettää STOP-ehdon. START-ehdon jälkeen Master lähettää 7-bittisen Slave-osoitteen ja yhden tiedonsiirron suuntaa ilmoittavan bitin kuvan mukaan. Jos tiedonsuuntabitti on nolla, tieto Masterista Slave-laitteelle, ykkösbitillä Slave-laitteesta Masterille. Osoitettu Slave vastaa kuittauksella.
 kaksisuuntainen linja tahdistusta varten Kaikilla väylään liitetyillä laitteilla on oma osoitteensa ja jokainen laitteista voi periaatteessa toimia lähettävänä ja")
15 I2C-väylä (Inter-Integrated Circuit bus) START-ehto: SCL-linja ylätilassa ja SDA-linja alatilaan. STOP-ehto: SCL-linja ylätilassa ja SDA-linja ylätilaan. Vapauttaa aina väylän. SCL-linjalla tahdistetaan tiedonsiirto siten, että SDA-linjan tila voi vaihtua ainoastaan silloin, kun SCL alhaalla. I2C-väylä (Inter-Integrated Circuit bus) Tieto siirretään 8 bitin lohkoina MSB-bitti ensin. Datan vastaanottaja kuittaa jokaisen vastaanotetun paketin ja voi tarvittaessa pysäyttää tiedonsiirron hetkeksi vetämällä SCL-linjan alatilaan. Lähetettyään yhden datapaketin Master-laite vetään SDA-linjan ylös ja kuittaava laite vetää SDA-linjan alas. I2C-laitteiden 7-bittiset osoitteet ovat yleensä osittain käyttäjän määriteltävissä (alimmat bitit). Väylällä on mahdollista lähettää myös yleislähetyksiä (general).

16 I2C-väylä (Inter-Integrated Circuit bus) Kuittaus I2C-väylällä SPI (Serial peripheral interface) SPI on Motorolan kehittelemä nopea kaksisuuntainen synkroninen tiedonsiirtoväylä master ja slave-laitteen välillä. De facto standardi. Master-laite määrittelee tiedonsiirtoparametrit. Siinä ei eri oheislaitteita erotella osoitteen perusteella vaan käytetään slave select piirinvalintanastaa (chip select). Näitä linjoja tarvitaan mikrokontrollerilla yhtä paljon kuin on SPI:tä käyttäviä oheiskomponentteja. Koska osoitetietoja ei tarvitse siirtää, ei tiedonsiirtokapasiteettia kulu overheadiin. SPI-väylän nopeutta ja muita tiedonsiirtoparametreja voidaan yleensä konfiguroida kontrollerilla. Käytetään tyypillisesti oheispiirien liittämiseen kontrolleriin. Suoraan SPI-liitäntään sopivia I/O- ja muistipiirejä on saatavissa. Samoin useat A/D- ja D/A-muuntimet soveltuvat liitettäviksi siihen. Liitäntää voidaan käyttää myös normaalien siirtorekisterien kanssa I/O liitäntöjen laajentamiseen. Se soveltuu hyvin myös kontrollereiden väliseen liikennöintiin.

17 SPI (Serial peripheral interface) SPI-väylän tiedonsiirrosta huolehtii neljä signaalia. SCLK Serial Clock (output from master) MOSI Master Output, Slave Input (output from master) MISO Master Input, Slave Output (output from slave) SS Slave Select (aktiivinen alhaalla, output from master) SPI-väylällä on aina yksi master-laite ja vähintään yksi slave-laite. Tiedonsiirto oheislaitteen kanssa aloitetaan pakottamalla SS-linja alas. SPI (Serial peripheral interface) Parametreilla CPOL (clock polarity) ja CPHA (clock phase) määritellään tiedonsiirtoa tahdistavat pulssien reunat. Kommunikoinnissa täytyy huolehtia, että asetukset ovat masterilla ja slave-laitteella samat ja tarvittaessa muuttaa ne samoiksi. SPI Mode CPOL CPHA Shift SCK edge Capture SCK edge Falling Rising Rising Falling Rising Falling Falling Rising Table: SPI Mode configuration
 Parametreilla CPOL (clock polarity) ja CPHA (clock phase) määritellään tiedonsiirtoa tahdistavat pulssien reunat.")
18 SPI (Serial peripheral interface) Esimerkkinä ATMega128:n SPI Liikennöinti masterin ja slave-laitteen välillä SPI (Serial peripheral interface) Esimerkkinä ATMega128:n SPI SPI-tiedonsiirto koostuu kahdesta siirtorekisteristä ja masterin generoimasta kellosignaalista. Tiedonsiirto alkaa, kun master pakottaa valitun piirin Slave Select SS-linjan alas. Tietoa siirretään masterilta slave-laitteelle MOSI-linjalla ja slave-laitteelta masterille MISO-linjalla. Jokainen datapaketin siirto lopetetaan nostamalla SS-linja takaisin ylös. Ohjelmoijan on huolehdittava SS-linjan tilan muutoksista. Kun oheiskomponentti on valittu, tiedonsiirto aloitetaan kirjoittamalla data SPI:n data rekisteriin. Tällöin kellosignaali käynnistyy ja tieto siirretään slave-laitteen SPI-siirtorekisteriin. Kun tavu on siirretty, kellosignaali loppuu ja tieto tästä tulee lippurekisteriin ja haluttaessa tästä voidaan saada myös keskeytystieto. Riippuen konfiguroinnista tiedonsiirtoa voidaan nyt jatkaa tai se voidaan keskeyttää nostamalla SS-linja ylös. Slave-laitteen SPI-tiedonsiirto voi käynnistyä vasta, kun SS-nasta menee aktiiviseksi. Lippurekisteristä voidaan tutkia, milloin datan siirto on valmis.

19 SPI (Serial peripheral interface) Esimerkkinä ATMega128:n SPI Microwire National Semiconductorin kehittämä kolmijohtiminen tiedonsiirtoväylä. Muistuttaa SPI-väylää. Liikennöinti tapahtuu kolmea johdinta käyttäen: SI (Serial In) SO (Serial Out) SK (Serial Clock) Tietoa siirretään molempiin suuntiin kellopulssin nousevalla reunalla. Kuten SPI tarvitsee piirinvalintasignaalin (chip select). Microwire-väylään liitettävillä komponenteilla on jokaisella oma protokollansa. Siirrettävien bittien määrä ja merkitys vaihtelee.
.")
20 1-wire 1-Wire on Dallas Semiconductorin kehittämä hidas, kaksisuuntainen tiedonsiirtomenetelmä, jossa signaali ja käyttöjännite saadaan samasta linjasta. Muistuttaa hiukan I2C-väylää, mutta on hitaampi ja toteutukseltaan halvempi. Käytetään erityisesti antureissa, kuten digitaalisissa lämpötila-antureissa ja säätä mittaavissa antureissa. Edullinen, koska tarvitsee vain data- ja maajohtimen. Piirissä on 800pF:n kapasitanssi, josta käyttöjännite louhitaan. Väylää ohjaa mikrokontrolleri (master) ja väylään liitettävät laitteet ovat slavelaitteita. Vain isäntä voi käynnistää tiedonsiirron. Dataliitäntä on avokollektorityyppinen jokainen laite voi vetää datalinja alas. 1-wire 1-wire protokolla Lepotilassa väylä on ylhäällä ja voi olla alhaalla vain hyvin lyhyitä jaksoja käyttöjännite antureille. Väylän liikennöinti alkaa nolla-pulssilla (reset pulse). Isäntä vetää väylän alas µs ajaksi. Isäntä siirtyy kuuntelemaan väylää ja mahdolliset orjat vastaavat vetämällä datalinjan alas µs kuluttua µs ajaksi.
 ja väylään liitettävät laitteet ovat slavelaitteita. Vain isäntä voi käynnistää tiedonsiirron.")
21 1-wire 1-wire protokolla Ylemmässä kuvassa master kirjoittaa ensin nolla-pulssin, sitten ykkös-pulssin. Alemmassa kuvassa master lukee väylää. Lukeminen alkaa niin, että master vetää väylän 1µs alas ja päästää sitten väylän lepotilaan. Master lukee sen jälkeen väylän tilan. Jos slave-laite lähettää 0, väylä vedetään alas. Mikäli tieto on 1, slave ei vedä väylää alas. CAN-väylä CAN on alun perin autoteollisuuden tarpeisiin kehitetty tiedonsiirtomenetelmä. Se on ISO:n ja SAE:n määrittelemä. Se soveltuu hyvin reaaliaikaiseen kontrollereiden väliseen tiedonsiirtoon. Väyläratkaisulla haluttiin saada parempi häiriönsietokyky vaikeissa olasuhteissa (teollisuus, ajoneuvot, ) CAN-väylän ohjain löytyy monista mikrokontrollereista nykyään valmiiksi integroituna CAN tukee useiden isäntien kytkeytymistä samaan väylään. Laitteita teoriassa rajaton määrä (ei osoitteita) Nopea tiedonsiirto, jopa 1Mb/s. Pystyy havaitsemaan väylässä tapahtuvia virheitä. Väylän käyttö esim. autoteollisuudessa on perusteltua. Elektroniikkalaitteiden määrä ajoneuvoissa kasvaa (johdotuksen tila-, kustannus- ja asennusongelmat) Useille ohjausyksikölle on saatava tieto monilta antureilta nopeasti. Kaikki tiedot on saatavissa samalta väylältä. Rakenne modulaarinen voidaan lisätä laitteita helposti.
22 CAN-väylä CAN-väylän protokolla CAN-väylä on usean isännän väylä ja siinä liikennöinti perustuu broadcastlähetyksiin, jossa lähetetyt datapaketit ovat kaikkien kuultavissa. Sanomassa ei ole lähettäjän tai vastaanottajan osoitetietoja, vaan mittausdataa, komentoja ym. lähetetään väylälle vapaassa järjestyksessä. Kaikki moduulit, jotka tarvitsevat tietoa, voivat sitä käyttää. Sanomatyyppejä voi olla useita ja jokaisella sanomatyypillä on oma tunnisteensa, joka kertoo sisällön ja sanoman prioriteetin. Prioriteetilla on merkitystä, kun usea laite kilpailee saman väylän käytöstä. Yksi sanoma voi olla korkeintaan 8 tavua pitkä CAN-väylä Kehysrakenne SOF = kehyksen alku MESSAGE ID = 11 tai 29 bittiä moodista riippuen RTR = ilmoittaa onko tietokehys vai kyselykehys CONTROL = data payloadin pituus DATA = tietokenttä (0-8 tavua) CRC = tarkistussumma ACK = kuittauskenttä EOF = end of frame
23 CAN-väylä Lähteitä I. Scott MacKenzie, Raphael C.-W- Phan, The 8051 Microcontroller, Prentice Hall, 4th ed. Jari Koskinen, Mikrotietokonetekniikka Sulautetut järjestelmät, Otava Muhammad Ali Mazidi, Janice Gillispie Mazidi, Rolin D. McKinlay, The 8051 Microcontroller and Embedded Systems, Prentice Hall Piirivalmistajien sivustot: Hitachi, Motorola, Chipcon, Atmel, Dallas Semiconductor, National Semiconductor.
Piirien väliset ohjaus- ja tiedonsiirtoväylät H. Honkanen
 Piirien väliset ohjaus- ja tiedonsiirtoväylät H. Honkanen Laitteiden sisäiseen tietoliikenteeseen on kehitetty omat dataväylänsä. Näistä tärkeimmät: 1 wire [ käyttää mm. Dallas, Maxim. ] I²C [ Trademark
Piirien väliset ohjaus- ja tiedonsiirtoväylät H. Honkanen Laitteiden sisäiseen tietoliikenteeseen on kehitetty omat dataväylänsä. Näistä tärkeimmät: 1 wire [ käyttää mm. Dallas, Maxim. ] I²C [ Trademark
6. Analogisen signaalin liittäminen mikroprosessoriin 2 6.1 Näytteenotto analogisesta signaalista 2 6.2. DA-muuntimet 4
 Datamuuntimet 1 Pekka antala 19.11.2012 Datamuuntimet 6. Analogisen signaalin liittäminen mikroprosessoriin 2 6.1 Näytteenotto analogisesta signaalista 2 6.2. DA-muuntimet 4 7. AD-muuntimet 5 7.1 Analoginen
Datamuuntimet 1 Pekka antala 19.11.2012 Datamuuntimet 6. Analogisen signaalin liittäminen mikroprosessoriin 2 6.1 Näytteenotto analogisesta signaalista 2 6.2. DA-muuntimet 4 7. AD-muuntimet 5 7.1 Analoginen
Kontrollerin tehonsäätö
 Kontrollerin tehonsäätö Sulautetut järjestelmät ovat monesti akku- tai paristokäyttöisiä ja tällöin myös mikro-ohjaimen virrankulutuksella on suuri merkitys laitteen käytettävyydelle. Virrankulutuksella
Kontrollerin tehonsäätö Sulautetut järjestelmät ovat monesti akku- tai paristokäyttöisiä ja tällöin myös mikro-ohjaimen virrankulutuksella on suuri merkitys laitteen käytettävyydelle. Virrankulutuksella
Signaalien datamuunnokset. Näytteenotto ja pito -piirit
 Signaalien datamuunnokset Muunnoskomponentit Näytteenotto ja pitopiirit Multiplekserit A/D-muuntimet Jännitereferenssit D/A-muuntimet Petri Kärhä 26/02/2008 Signaalien datamuunnokset 1 Näytteenotto ja
Signaalien datamuunnokset Muunnoskomponentit Näytteenotto ja pitopiirit Multiplekserit A/D-muuntimet Jännitereferenssit D/A-muuntimet Petri Kärhä 26/02/2008 Signaalien datamuunnokset 1 Näytteenotto ja
Successive approximation AD-muunnin
 AD-muunnin Koostuu neljästä osasta: näytteenotto- ja pitopiiristä, (sample and hold S/H) komparaattorista, digitaali-analogiamuuntimesta (DAC) ja siirtorekisteristä. (successive approximation register
AD-muunnin Koostuu neljästä osasta: näytteenotto- ja pitopiiristä, (sample and hold S/H) komparaattorista, digitaali-analogiamuuntimesta (DAC) ja siirtorekisteristä. (successive approximation register
ELEC-A4010 Sähköpaja Arduinon väylät tutuiksi
 ELEC-A4010 Sähköpaja Arduinon väylät tutuiksi Risto Järvinen 2.11.2015 Luennon sisältö Alustus: Väylät, mitä ja miksi. Alustus: logiikka-analysaattori. Yleisnäkymä Arduino/AVR:n väyliin. Väylä: I2C Väylä:
ELEC-A4010 Sähköpaja Arduinon väylät tutuiksi Risto Järvinen 2.11.2015 Luennon sisältö Alustus: Väylät, mitä ja miksi. Alustus: logiikka-analysaattori. Yleisnäkymä Arduino/AVR:n väyliin. Väylä: I2C Väylä:
1. Yleistä. 2. Ominaisuudet. 3. Liitännät
 1. Yleistä SerIO on mittaus ja ohjaustehtäviin tarkoitettu prosessorikortti. Se voi ohjemistosta riippuen toimia itsenäisenä yksikkönä tai tietokoneen ohjaamana. Jälkimmäisessä tapauksessa mittaus ja ohjauskomennot
1. Yleistä SerIO on mittaus ja ohjaustehtäviin tarkoitettu prosessorikortti. Se voi ohjemistosta riippuen toimia itsenäisenä yksikkönä tai tietokoneen ohjaamana. Jälkimmäisessä tapauksessa mittaus ja ohjauskomennot
7.3. Oheisrautaa. DS1820 30.10.2007
 7.3. Oheisrautaa. DS1820 30.10.2007 Miksi eteenpäin pyrkivällä insinööriopettajalla rehtoriksi tullessaan, on aina päässään paljon muutakin kuin järkeä? - Mr Maple Sisältö Yleistä 1-Wire-väylän lyhyt esittely
7.3. Oheisrautaa. DS1820 30.10.2007 Miksi eteenpäin pyrkivällä insinööriopettajalla rehtoriksi tullessaan, on aina päässään paljon muutakin kuin järkeä? - Mr Maple Sisältö Yleistä 1-Wire-väylän lyhyt esittely
Signaalien datamuunnokset
 Signaalien datamuunnokset Muunnoskomponentit Näytteenotto ja pitopiirit Multiplekserit A/D-muuntimet Jännitereferenssit D/A-muuntimet Petri Kärhä 17/02/2005 Luento 4b: Signaalien datamuunnokset 1 Näytteenotto
Signaalien datamuunnokset Muunnoskomponentit Näytteenotto ja pitopiirit Multiplekserit A/D-muuntimet Jännitereferenssit D/A-muuntimet Petri Kärhä 17/02/2005 Luento 4b: Signaalien datamuunnokset 1 Näytteenotto
TIES530 TIES530. Moniprosessorijärjestelmät. Moniprosessorijärjestelmät. Miksi moniprosessorijärjestelmä?
 Miksi moniprosessorijärjestelmä? Laskentaa voidaan hajauttaa useammille prosessoreille nopeuden, modulaarisuuden ja luotettavuuden vaatimuksesta tai hajauttaminen voi helpottaa ohjelmointia. Voi olla järkevää
Miksi moniprosessorijärjestelmä? Laskentaa voidaan hajauttaa useammille prosessoreille nopeuden, modulaarisuuden ja luotettavuuden vaatimuksesta tai hajauttaminen voi helpottaa ohjelmointia. Voi olla järkevää
Kojemeteorologia. Sami Haapanala syksy 2013. Fysiikan laitos, Ilmakehätieteiden osasto
 Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Datan käsittely ja tallentaminen Käytännössä kaikkien mittalaitteiden ensisijainen signaali on analoginen Jotta tämä
Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Datan käsittely ja tallentaminen Käytännössä kaikkien mittalaitteiden ensisijainen signaali on analoginen Jotta tämä
ELEC-C5070 Elektroniikkapaja (5 op)
") (5 op) Luento 5 A/D- ja D/A-muunnokset ja niiden vaikutus signaaleihin Signaalin A/D-muunnos Analogia-digitaalimuunnin (A/D-muunnin) muuttaa analogisen signaalin digitaaliseen muotoon, joka voidaan lukea
(5 op) Luento 5 A/D- ja D/A-muunnokset ja niiden vaikutus signaaleihin Signaalin A/D-muunnos Analogia-digitaalimuunnin (A/D-muunnin) muuttaa analogisen signaalin digitaaliseen muotoon, joka voidaan lukea
A/D-muuntimia. Flash ADC
 A/D-muuntimia A/D-muuntimen valintakriteerit: - bittien lukumäärä instrumentointi 6 16 audio/video/kommunikointi/ym. 16 18 erikoissovellukset 20 22 - Tarvittava nopeus hidas > 100 μs (
A/D-muuntimia A/D-muuntimen valintakriteerit: - bittien lukumäärä instrumentointi 6 16 audio/video/kommunikointi/ym. 16 18 erikoissovellukset 20 22 - Tarvittava nopeus hidas > 100 μs (
A / D - MUUNTIMET. 2 Bittimäärä 1. tai. A / D muunnin, A/D converter, ADC, ( Analog to Digital Converter )
") A / D - MUUNTIMET A / D muunnin, A/D converter, ADC, ( Analog to Digital Converter ) H. Honkanen Muuntaa analogisen tiedon ( yleensä jännite ) digitaalimuotoon. Lähtevä data voi olla sarja- tai rinnakkaismuotoista.
A / D - MUUNTIMET A / D muunnin, A/D converter, ADC, ( Analog to Digital Converter ) H. Honkanen Muuntaa analogisen tiedon ( yleensä jännite ) digitaalimuotoon. Lähtevä data voi olla sarja- tai rinnakkaismuotoista.
MUISTIPIIRIT H. Honkanen
 MUISTIPIIRIT H. Honkanen Puolijohdemuistit voidaan jaotella käyttötarkoituksensa mukaisesti: Puolijohdemuistit Luku- ja kirjoitusmuistit RAM, Random Access Memory - Käytetään ohjelman suorituksen aikaisen
MUISTIPIIRIT H. Honkanen Puolijohdemuistit voidaan jaotella käyttötarkoituksensa mukaisesti: Puolijohdemuistit Luku- ja kirjoitusmuistit RAM, Random Access Memory - Käytetään ohjelman suorituksen aikaisen
Tehtävä 2: Tietoliikenneprotokolla
 Tehtävä 2: Tietoliikenneprotokolla Johdanto Tarkastellaan tilannetta, jossa tietokone A lähettää datapaketteja tietokoneelle tiedonsiirtovirheille alttiin kanavan kautta. Datapaketit ovat biteistä eli
Tehtävä 2: Tietoliikenneprotokolla Johdanto Tarkastellaan tilannetta, jossa tietokone A lähettää datapaketteja tietokoneelle tiedonsiirtovirheille alttiin kanavan kautta. Datapaketit ovat biteistä eli
Flash AD-muunnin. suurin kaistanleveys muista muuntimista (gigahertsejä) pieni resoluutio (max 8) kalliita
 pieni resoluutio (max 8) kalliita") Flash AD-muunnin Flash AD-muunnin koostuu monesta peräkkäisestä komparaattorista, joista jokainen vertaa muunnettavaa signaalia omaan referenssijännitteeseensä. Referenssijännite aikaansaadaan jännitteenjaolla:
Flash AD-muunnin Flash AD-muunnin koostuu monesta peräkkäisestä komparaattorista, joista jokainen vertaa muunnettavaa signaalia omaan referenssijännitteeseensä. Referenssijännite aikaansaadaan jännitteenjaolla:
Projektityöt. Sami Alaiso, Jyri Lujanen 30. marraskuuta 2009
 Projektityöt Sami Alaiso, Jyri Lujanen 30. marraskuuta 2009 1 1 Yleistä Projektityön tarkoituksena oli suunnitella ja toteuttaa yleiskäyttöinen CAN-ohjain, jolla voidaan vastaanottaa viestejä CAN-väylältä,
Projektityöt Sami Alaiso, Jyri Lujanen 30. marraskuuta 2009 1 1 Yleistä Projektityön tarkoituksena oli suunnitella ja toteuttaa yleiskäyttöinen CAN-ohjain, jolla voidaan vastaanottaa viestejä CAN-väylältä,
Flash AD-muunnin. Ominaisuudet. +nopea -> voidaan käyttää korkeataajuuksisen signaalin muuntamiseen (GHz) +yksinkertainen
 +yksinkertainen") Flash AD-muunnin Koostuu vastusverkosta ja komparaattoreista. Komparaattorit vertailevat vastuksien jännitteitä referenssiin. Tilanteesta riippuen kompraattori antaa ykkösen tai nollan ja näistä kootaan
Flash AD-muunnin Koostuu vastusverkosta ja komparaattoreista. Komparaattorit vertailevat vastuksien jännitteitä referenssiin. Tilanteesta riippuen kompraattori antaa ykkösen tai nollan ja näistä kootaan
Arduino. Kimmo Silvonen (X)
") Arduino Kimmo Silvonen (X) Arduino, toimiva oma versio (osat Pajalla) ATmega 328P IC DIL-kotelossa (DIP) päältä katsottuna, Arduinon pinnit +5 V TX RX DTR FT232 10k 22p 22p Reset 1 RX D0 TX D1 D2 PWM D3
Arduino Kimmo Silvonen (X) Arduino, toimiva oma versio (osat Pajalla) ATmega 328P IC DIL-kotelossa (DIP) päältä katsottuna, Arduinon pinnit +5 V TX RX DTR FT232 10k 22p 22p Reset 1 RX D0 TX D1 D2 PWM D3
Muuntavat analogisen signaalin digitaaliseksi Vertaa sisääntulevaa signaalia referenssijännitteeseen Sarja- tai rinnakkaismuotoinen Tyypilliset
 Muuntavat analogisen signaalin digitaaliseksi Vertaa sisääntulevaa signaalia referenssijännitteeseen Sarja- tai rinnakkaismuotoinen Tyypilliset valintakriteerit resoluutio ja nopeus Yleisimmät A/D-muunnintyypit:
Muuntavat analogisen signaalin digitaaliseksi Vertaa sisääntulevaa signaalia referenssijännitteeseen Sarja- tai rinnakkaismuotoinen Tyypilliset valintakriteerit resoluutio ja nopeus Yleisimmät A/D-muunnintyypit:
Mikrokontrollerit. Mikrokontrolleri
 Mikrokontrollerit S-108.2010 Elektroniset mittaukset 18.2.2008 Mikrokontrolleri integrointi säästää tilaa piirilevyllä usein ratkaisu helpompi ja nopeampi toteuttaa ohjelmallisesti prosessori 4-64 bittinen
Mikrokontrollerit S-108.2010 Elektroniset mittaukset 18.2.2008 Mikrokontrolleri integrointi säästää tilaa piirilevyllä usein ratkaisu helpompi ja nopeampi toteuttaa ohjelmallisesti prosessori 4-64 bittinen
CLPD ja FPGA piirien arkkitehtuuri ja ominaisuudet
 Pasi Vähämartti ITSEOPISKELU 1(10) CLPD ja FPGA piirien arkkitehtuuri ja ominaisuudet Tutki data-kirjasta XC9500-sarjan CPLD piirin: 1. Arkkitehtuuri 2. Suurimman ja pienimmän piirin portti-, pinni- ja
Pasi Vähämartti ITSEOPISKELU 1(10) CLPD ja FPGA piirien arkkitehtuuri ja ominaisuudet Tutki data-kirjasta XC9500-sarjan CPLD piirin: 1. Arkkitehtuuri 2. Suurimman ja pienimmän piirin portti-, pinni- ja
SPI-VÄYLÄN TOTEUTUS FPGA-PIIRILLE
 SPI-VÄYLÄN TOTEUTUS FPGA-PIIRILLE Lauri Similä Ohjaaja: Jukka Lahti ELEKTRONIIKAN JA TIETOLIIKENNETEKNIIKAN TUTKINTO-OHJELMA 2018 2 Similä L. (2018) SPI-väylän toteutus FPGA-piirille. Oulun yliopisto,
SPI-VÄYLÄN TOTEUTUS FPGA-PIIRILLE Lauri Similä Ohjaaja: Jukka Lahti ELEKTRONIIKAN JA TIETOLIIKENNETEKNIIKAN TUTKINTO-OHJELMA 2018 2 Similä L. (2018) SPI-väylän toteutus FPGA-piirille. Oulun yliopisto,
A15 - Inertial Measurement Unit
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt (6op) 16.09.2008-19.12.2008 A15 - Inertial Measurement Unit Mikko Virkkilä Aki Juutistenaho Ohjaaja: Tapio
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt (6op) 16.09.2008-19.12.2008 A15 - Inertial Measurement Unit Mikko Virkkilä Aki Juutistenaho Ohjaaja: Tapio
LABORATORIOTYÖ 2 A/D-MUUNNOS
 LABORATORIOTYÖ 2 A/D-MUUNNOS 2-1 2. A/D-muunnos Työn tarkoitus Tässä työssä demotaan A/D-muunnoksen ominaisuuksia ja ongelmia. Tarkoitus on osoittaa käytännössä, miten bittimäärä ja näytteenottotaajuus
LABORATORIOTYÖ 2 A/D-MUUNNOS 2-1 2. A/D-muunnos Työn tarkoitus Tässä työssä demotaan A/D-muunnoksen ominaisuuksia ja ongelmia. Tarkoitus on osoittaa käytännössä, miten bittimäärä ja näytteenottotaajuus
S-108.3020 Elektroniikan häiriökysymykset. Laboratoriotyö, kevät 2010
 1/7 S-108.3020 Elektroniikan häiriökysymykset Laboratoriotyö, kevät 2010 Häiriöiden kytkeytyminen yhteisen impedanssin kautta lämpötilasäätimessä Viimeksi päivitetty 25.2.2010 / MO 2/7 Johdanto Sähköisiä
1/7 S-108.3020 Elektroniikan häiriökysymykset Laboratoriotyö, kevät 2010 Häiriöiden kytkeytyminen yhteisen impedanssin kautta lämpötilasäätimessä Viimeksi päivitetty 25.2.2010 / MO 2/7 Johdanto Sähköisiä
LABORATORIOTYÖ 2 A/D-MUUNNOS
 LABORATORIOTYÖ 2 A/D-MUUNNOS Päivitetty: 23/01/2009 TP 2-1 2. A/D-muunnos Työn tarkoitus Tässä työssä demotaan A/D-muunnoksen ominaisuuksia ja ongelmia. Tarkoitus on osoittaa käytännössä, miten bittimäärä
LABORATORIOTYÖ 2 A/D-MUUNNOS Päivitetty: 23/01/2009 TP 2-1 2. A/D-muunnos Työn tarkoitus Tässä työssä demotaan A/D-muunnoksen ominaisuuksia ja ongelmia. Tarkoitus on osoittaa käytännössä, miten bittimäärä
BL40A1711 Johdanto digitaaleketroniikkaan: Sekvenssilogiikka, pitopiirit ja kiikut
 BL40A1711 Johdanto digitaaleketroniikkaan: Sekvenssilogiikka, pitopiirit ja kiikut Sekvenssilogiikka Kombinatooristen logiikkapiirien lähtömuuttujien nykyiset tilat y i (n) ovat pelkästään riippuvaisia
BL40A1711 Johdanto digitaaleketroniikkaan: Sekvenssilogiikka, pitopiirit ja kiikut Sekvenssilogiikka Kombinatooristen logiikkapiirien lähtömuuttujien nykyiset tilat y i (n) ovat pelkästään riippuvaisia
6.2. AVR_rauta. Analogia-komparaattori-ohjelmointia 12.12.2007, pva
 6.2. AVR_rauta. Analogia-komparaattori-ohjelmointia 12.12.2007, pva Joka hitaasti kulkee, se kauaksi pääsee. - tuntematon Sisältö yleistä rekisterit analogiavertailijan käyttö - jännitevahti - audiokytkin
6.2. AVR_rauta. Analogia-komparaattori-ohjelmointia 12.12.2007, pva Joka hitaasti kulkee, se kauaksi pääsee. - tuntematon Sisältö yleistä rekisterit analogiavertailijan käyttö - jännitevahti - audiokytkin
ELEC-C5070 Elektroniikkapaja (5 op)
") (5 op) Luento 3, osa 2 PSoC (yksityiskohtaisempi esittely / JM) Alkuluennolta: Programmable System-on-Chip (PSoC) Ohjelmoitava järjestelmä vain yhdellä mikropiirillä PSoC 1,3,4,5LP eri suoritustasoja Tietoa:
(5 op) Luento 3, osa 2 PSoC (yksityiskohtaisempi esittely / JM) Alkuluennolta: Programmable System-on-Chip (PSoC) Ohjelmoitava järjestelmä vain yhdellä mikropiirillä PSoC 1,3,4,5LP eri suoritustasoja Tietoa:
Kuva maailmasta Pakettiverkot (Luento 1)
") M.Sc.(Tech.) Marko Luoma (1/20) M.Sc.(Tech.) Marko Luoma (2/20) Kuva maailmasta Pakettiverkot (Luento 1) WAN Marko Luoma TKK Teletekniikan laboratorio LAN M.Sc.(Tech.) Marko Luoma (3/20) M.Sc.(Tech.) Marko
M.Sc.(Tech.) Marko Luoma (1/20) M.Sc.(Tech.) Marko Luoma (2/20) Kuva maailmasta Pakettiverkot (Luento 1) WAN Marko Luoma TKK Teletekniikan laboratorio LAN M.Sc.(Tech.) Marko Luoma (3/20) M.Sc.(Tech.) Marko
AS-0.3200 automaatio- ja systeemitekniikan projektityöt
 AS-0.3200 automaatio- ja systeemitekniikan projektityöt Yleiskäyttöinen CAN-ohjain Sami Alaiso, Jyri Lujanen Sisältö 1 Yleistä 2 1.1 Hardware............................................... 3 1.2 Software................................................
AS-0.3200 automaatio- ja systeemitekniikan projektityöt Yleiskäyttöinen CAN-ohjain Sami Alaiso, Jyri Lujanen Sisältö 1 Yleistä 2 1.1 Hardware............................................... 3 1.2 Software................................................
6.1. AVR_rauta. ADC-ohjelmointi 6.1.2008 pva, kuvat jma
 6.1. AVR_rauta. ADC-ohjelmointi 6.1.2008 pva, kuvat jma Eräät tykkäävät omasta navasta niin paljon, että ovat valmiita kumartamaan syväänkin pitääkseen sen näkyvissä. - Jerzy Lec Tässä osiossa tärkeää:
6.1. AVR_rauta. ADC-ohjelmointi 6.1.2008 pva, kuvat jma Eräät tykkäävät omasta navasta niin paljon, että ovat valmiita kumartamaan syväänkin pitääkseen sen näkyvissä. - Jerzy Lec Tässä osiossa tärkeää:
HARJOITUSTYÖ: LabVIEW, Liiketunnistin
 Tämä käyttöohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 HARJOITUSTYÖ: LabVIEW, Liiketunnistin Tarvittavat laitteet: PC Labview
Tämä käyttöohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 HARJOITUSTYÖ: LabVIEW, Liiketunnistin Tarvittavat laitteet: PC Labview
KÄYTTÖOHJE. M2M Point - to - Point
 KÄYTTÖOHJE M2M Point - to - Point M2M Paketti SISÄLLYSLUETTELO YLEISTÄ 1 KÄYTTÖÖNOTTO 1.1 LAITTEISTON ASENNUS 2 TULOJEN JA LÄHTÖJEN KYTKENTÄ 2.1 TILATIETOKYTKENNÄT 2.2 ANALOGIAKYTKENNÄT 3 KANAVANVAIHTO
KÄYTTÖOHJE M2M Point - to - Point M2M Paketti SISÄLLYSLUETTELO YLEISTÄ 1 KÄYTTÖÖNOTTO 1.1 LAITTEISTON ASENNUS 2 TULOJEN JA LÄHTÖJEN KYTKENTÄ 2.1 TILATIETOKYTKENNÄT 2.2 ANALOGIAKYTKENNÄT 3 KANAVANVAIHTO
Verilogvs. VHDL. Janne Koljonen University of Vaasa
 Verilogvs. VHDL Janne Koljonen University of Vaasa Sälää Huom! Verilogistauseita versioita: 1995, 2001 ja 2005. Kommentit Javasta tutut // ja /* */ ovat kommenttimerkkejä. Case sensitivity Isot ja pienet
Verilogvs. VHDL Janne Koljonen University of Vaasa Sälää Huom! Verilogistauseita versioita: 1995, 2001 ja 2005. Kommentit Javasta tutut // ja /* */ ovat kommenttimerkkejä. Case sensitivity Isot ja pienet
Anturit ja Arduino. ELEC-A4010 Sähköpaja Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka
 Anturit ja Arduino Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka Anturit ja Arduino Luennon sisältö 1. Taustaa 2. Antureiden ominaisuudet 3. AD-muunnos 4. Antureiden lukeminen Arduinolla
Anturit ja Arduino Tomi Pulli Signaalinkäsittelyn ja akustiikan laitos Mittaustekniikka Anturit ja Arduino Luennon sisältö 1. Taustaa 2. Antureiden ominaisuudet 3. AD-muunnos 4. Antureiden lukeminen Arduinolla
KÄYTTÖOHJE TEHR LU / TEHR-M
 V1.0.7 (31.10.2013) 1 (5) YHTEENSOPIVT TUOTTEET TEHR LU TEHR LU-PU TEHR- TEHR--PU TEKNISET TIEOT Käyttöjännite Virrankulutus ittausalue (valitaan jumppereilla) Toiminnot Optiot Lähdöt Tiedonsiirto Tarkkuus
V1.0.7 (31.10.2013) 1 (5) YHTEENSOPIVT TUOTTEET TEHR LU TEHR LU-PU TEHR- TEHR--PU TEKNISET TIEOT Käyttöjännite Virrankulutus ittausalue (valitaan jumppereilla) Toiminnot Optiot Lähdöt Tiedonsiirto Tarkkuus
Ohjelmistoradio. Mikä se on:
 1 Mikä se on: SDR = Software Defined Radio radio, jossa ohjelmisto määrittelee toiminnot ja ominaisuudet: otaajuusalue olähetelajit (modulaatio) olähetysteho etuna joustavuus, jota tarvitaan sovelluksissa,
1 Mikä se on: SDR = Software Defined Radio radio, jossa ohjelmisto määrittelee toiminnot ja ominaisuudet: otaajuusalue olähetelajit (modulaatio) olähetysteho etuna joustavuus, jota tarvitaan sovelluksissa,
S-108.3020. Elektroniikan häiriökysymykset. Laboratoriotyö 1
 1/8 S-108.3020 Elektroniikan häiriökysymykset Laboratoriotyö 1 Häiriöiden kytkeytyminen yhteisen impedanssin kautta lämpötilasäätimessä 13.9.2007 TJ 2/8 3/8 Johdanto Sähköisiä häiriöitä on kaikkialla ja
1/8 S-108.3020 Elektroniikan häiriökysymykset Laboratoriotyö 1 Häiriöiden kytkeytyminen yhteisen impedanssin kautta lämpötilasäätimessä 13.9.2007 TJ 2/8 3/8 Johdanto Sähköisiä häiriöitä on kaikkialla ja
JOHDATUS ELEKTRONIIKKAAN. Oppitunti 2 Elektroniikan järjestelmät
 JOHDATUS ELEKTRONIIKKAAN Oppitunti 2 Elektroniikan järjestelmät 2 ELEKTRONIIKAN JÄRJESTELMÄT Aktiivisuusranneke Mittaa liikettä Keskustelee käyttäjän kanssa ledeillä ja värinällä Keskustelee radioiden
JOHDATUS ELEKTRONIIKKAAN Oppitunti 2 Elektroniikan järjestelmät 2 ELEKTRONIIKAN JÄRJESTELMÄT Aktiivisuusranneke Mittaa liikettä Keskustelee käyttäjän kanssa ledeillä ja värinällä Keskustelee radioiden
Arduino. Kimmo Silvonen (X)
") Arduino Kimmo Silvonen (X) Arduinon ohjelmointiympäristön installointi Teensyn (2.0) installointi Arduino IDE:n alle IDE = Integrated Development Environment Arduino UNO, ym.: https://www.arduino.cc/en/guide/windows
Arduino Kimmo Silvonen (X) Arduinon ohjelmointiympäristön installointi Teensyn (2.0) installointi Arduino IDE:n alle IDE = Integrated Development Environment Arduino UNO, ym.: https://www.arduino.cc/en/guide/windows
Tekniikka ja liikenne (5) Tietoliikennetekniikan laboratorio
 Tietoliikennetekniikan laboratorio") Tekniikka ja liikenne 4.4.2011 1 (5) Tietoliikennetekniikan laboratorio Työ 1 PCM-työ Työn tarkoitus Työssä tutustutaan pulssikoodimodulaation tekniseen toteutustapaan. Samalla nähdään, miten A/Dmuunnin
Tekniikka ja liikenne 4.4.2011 1 (5) Tietoliikennetekniikan laboratorio Työ 1 PCM-työ Työn tarkoitus Työssä tutustutaan pulssikoodimodulaation tekniseen toteutustapaan. Samalla nähdään, miten A/Dmuunnin
Opinnäytetyö. Äänisignaalin ohjausjärjestelmä. Sampsa Salo
 Opinnäytetyö Äänisignaalin ohjausjärjestelmä Sampsa Salo Tietotekniikka 2009 ii TURUN AMMATTIKORKEAKOULU OPINNÄYTETYÖN TIIVISTELMÄ Koulutusohjelma: Tietotekniikan koulutusohjelma Tekijä: Sampsa Salo Työn
Opinnäytetyö Äänisignaalin ohjausjärjestelmä Sampsa Salo Tietotekniikka 2009 ii TURUN AMMATTIKORKEAKOULU OPINNÄYTETYÖN TIIVISTELMÄ Koulutusohjelma: Tietotekniikan koulutusohjelma Tekijä: Sampsa Salo Työn
LUKUJA, DATAA KÄSITTELEVÄT FUNKTIOT JA NIIDEN KÄYTTÖ LOGIIKKAOHJAUKSESSA
 LUKUJA, DATAA KÄSITTELEVÄT FUNKTIOT JA NIIDEN KÄYTTÖ LOGIIKKAOHJAUKSESSA Tavallisimmin lukuja käsittelevien datasanojen tyypiksi kannattaa asettaa kokonaisluku 16 bitin INT, jonka vaihtelualueeksi tulee
LUKUJA, DATAA KÄSITTELEVÄT FUNKTIOT JA NIIDEN KÄYTTÖ LOGIIKKAOHJAUKSESSA Tavallisimmin lukuja käsittelevien datasanojen tyypiksi kannattaa asettaa kokonaisluku 16 bitin INT, jonka vaihtelualueeksi tulee
Tämä on PicoLog Windows ohjelman suomenkielinen pikaohje.
 Tämä on PicoLog Windows ohjelman suomenkielinen pikaohje. Asennus: HUOM. Tarkemmat ohjeet ADC-16 englanninkielisessä User Manual issa. Oletetaan että muuntimen kaikki johdot on kytketty anturiin, käyttöjännite
Tämä on PicoLog Windows ohjelman suomenkielinen pikaohje. Asennus: HUOM. Tarkemmat ohjeet ADC-16 englanninkielisessä User Manual issa. Oletetaan että muuntimen kaikki johdot on kytketty anturiin, käyttöjännite
Avoimen luukun varoitussanomat. Toiminto
 Toiminto Kaikki kuorma-autot 1 on varustettu avoimien luukkujen varoitussanomien näyttötoiminnolla. Varoitussanomaa voidaan käyttää erityyppisille luukuille, joissa on anturi, joka ilmaisee, että luukku
Toiminto Kaikki kuorma-autot 1 on varustettu avoimien luukkujen varoitussanomien näyttötoiminnolla. Varoitussanomaa voidaan käyttää erityyppisille luukuille, joissa on anturi, joka ilmaisee, että luukku
Esimerkkitentin ratkaisut ja arvostelu
 Sivu (5) 2.2.2 Fe Seuraavassa on esitetty tenttitehtävien malliratkaisut ja tehtäväkohtainen arvostelu. Osassa tehtävistä on muitakin hyväksyttäviä ratkaisuja kuin malliratkaisu. 2 Tehtävät on esitetty
Sivu (5) 2.2.2 Fe Seuraavassa on esitetty tenttitehtävien malliratkaisut ja tehtäväkohtainen arvostelu. Osassa tehtävistä on muitakin hyväksyttäviä ratkaisuja kuin malliratkaisu. 2 Tehtävät on esitetty
ELEC-C5070 Elektroniikkapaja (5 op)
") (5 op) Luento 3, osa 2 PSoC (yksityiskohtaisempi esittely) 1. luennolta: Programmable System-on-Chip (PSoC) Ohjelmoitava järjestelmä vain yhdellä mikropiirillä PSoC 1,3,4,5 eri suoritustasoja Tietoa: www.cypress.com
(5 op) Luento 3, osa 2 PSoC (yksityiskohtaisempi esittely) 1. luennolta: Programmable System-on-Chip (PSoC) Ohjelmoitava järjestelmä vain yhdellä mikropiirillä PSoC 1,3,4,5 eri suoritustasoja Tietoa: www.cypress.com
P I C A X E O H J E L M O I N T I
 PICAXE OHJELMOINTI Tämä materiaalipaketti on tehty PICAXE piireihin perustuvaa elektroniikan opetusta varten. Tarkoituksena on opettaa ohjelmoitavan mikropiirin käyttöä erilaisissa sovellutuksissa. Lisää
PICAXE OHJELMOINTI Tämä materiaalipaketti on tehty PICAXE piireihin perustuvaa elektroniikan opetusta varten. Tarkoituksena on opettaa ohjelmoitavan mikropiirin käyttöä erilaisissa sovellutuksissa. Lisää
Uuden kulunvalvonnan tuotteet
 1 Markkinoiden energiatehokkain turvavalojärjestelmä Huippuluokan toimintavarmuutta ja taloudellisuutta 2 Neptolux-turvavalojärjestelmä Markkinoiden energiatehokkaimmat opaste- ja turvavalaisimet Kustannustehokas
1 Markkinoiden energiatehokkain turvavalojärjestelmä Huippuluokan toimintavarmuutta ja taloudellisuutta 2 Neptolux-turvavalojärjestelmä Markkinoiden energiatehokkaimmat opaste- ja turvavalaisimet Kustannustehokas
11. kierros. 1. Lähipäivä
 11. kierros 1. Lähipäivä Viikon aihe AD/DA-muuntimet Signaalin digitalisointi Kvantisointivirhe Kvantisointikohina Kytkinkapasitanssipiirit Mitoitus Kontaktiopetusta: 6 tuntia Kotitehtäviä: 4 tuntia Tavoitteet:
11. kierros 1. Lähipäivä Viikon aihe AD/DA-muuntimet Signaalin digitalisointi Kvantisointivirhe Kvantisointikohina Kytkinkapasitanssipiirit Mitoitus Kontaktiopetusta: 6 tuntia Kotitehtäviä: 4 tuntia Tavoitteet:
DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä
 1 DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä JK 23.10.2007 Johdanto Harrasteroboteissa käytetään useimmiten voimanlähteenä DC-moottoria. Tämä moottorityyppi on monessa suhteessa kätevä
1 DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä JK 23.10.2007 Johdanto Harrasteroboteissa käytetään useimmiten voimanlähteenä DC-moottoria. Tämä moottorityyppi on monessa suhteessa kätevä
I 2 C-VÄYLÄ: OMINAISUUDET JA MITTAUKSET
 I 2 C-VÄYLÄ: OMINAISUUDET JA MITTAUKSET LAHDEN AMMATTIKORKEAKOULU Tekniikan ala Tietotekniikan koulutusohjelma Opinnäytetyö Syksy 2009 Mika Karhu Lahden ammattikorkeakoulu Tekniikan ala KARHU, MIKA: I
I 2 C-VÄYLÄ: OMINAISUUDET JA MITTAUKSET LAHDEN AMMATTIKORKEAKOULU Tekniikan ala Tietotekniikan koulutusohjelma Opinnäytetyö Syksy 2009 Mika Karhu Lahden ammattikorkeakoulu Tekniikan ala KARHU, MIKA: I
TIEP114 Tietokoneen rakenne ja arkkitehtuuri, 3 op. Assembly ja konekieli
 TIEP114 Tietokoneen rakenne ja arkkitehtuuri, 3 op Assembly ja konekieli Tietokoneen ja ohjelmiston rakenne Loogisilla piireillä ja komponenteilla rakennetaan prosessori ja muistit Prosessorin rakenne
TIEP114 Tietokoneen rakenne ja arkkitehtuuri, 3 op Assembly ja konekieli Tietokoneen ja ohjelmiston rakenne Loogisilla piireillä ja komponenteilla rakennetaan prosessori ja muistit Prosessorin rakenne
Jatkuva kierrosluvun rajoitus
 Taustaa Taustaa Jatkuvan kierrosluvun rajoitustoiminnon aktivointiin on olemassa kolme vaihtoehtoa. Jos ajoneuvo on varustettu BCI-toiminnolla (Bodywork Communication Interface): Analogisilla signaaleilla
Taustaa Taustaa Jatkuvan kierrosluvun rajoitustoiminnon aktivointiin on olemassa kolme vaihtoehtoa. Jos ajoneuvo on varustettu BCI-toiminnolla (Bodywork Communication Interface): Analogisilla signaaleilla
1 YLEISTÄ. Taitaja2002, Imatra Teollisuuselektroniikkatyö Protorakentelu 1.1 PROJEKTIN TARKOITUS
 Taitaja2002, Imatra Teollisuuselektroniikkatyö Protorakentelu 1 YLEISTÄ 1.1 PROJEKTIN TARKOITUS Tämä projekti on mikrokontrollerilla toteutettu lämpötilan seuranta kortti. Kortti kerää lämpöantureilta
Taitaja2002, Imatra Teollisuuselektroniikkatyö Protorakentelu 1 YLEISTÄ 1.1 PROJEKTIN TARKOITUS Tämä projekti on mikrokontrollerilla toteutettu lämpötilan seuranta kortti. Kortti kerää lämpöantureilta
YLEISTÄ ALOITUS. Laitteen kuvaus. Näytön kuvaus. Laitteen käynnistäminen ja sammuttaminen UP = YLÖS DOWN = ALAS BACK = TAKAISIN
 WT6 Pikaopas YLEISTÄ Laitteen kuvaus UP = YLÖS DOWN = ALAS BACK = TAKAISIN Näytön kuvaus 1. Väylän numero 2. Vasen/oikea greeninäkymä 3. Väylän Par-luku 4. Matka greenin taakse 5. Matka greenin eteen 6.
WT6 Pikaopas YLEISTÄ Laitteen kuvaus UP = YLÖS DOWN = ALAS BACK = TAKAISIN Näytön kuvaus 1. Väylän numero 2. Vasen/oikea greeninäkymä 3. Väylän Par-luku 4. Matka greenin taakse 5. Matka greenin eteen 6.
Nokeval No 280701. Käyttöohje. Tekstinäyttö 580-ALF
 Nokeval No 28070 Käyttöohje Tekstinäyttö 580-ALF Nokeval Oy Yrittäjäkatu 2 3700 NOKIA Puh. 03-342 4800 Fax. 03-342 2066 2 Kenttänäytttösarja 580 sarjaviesteille 5820 580 Sarjaviesti RS-232 tai RS-485 PC
Nokeval No 28070 Käyttöohje Tekstinäyttö 580-ALF Nokeval Oy Yrittäjäkatu 2 3700 NOKIA Puh. 03-342 4800 Fax. 03-342 2066 2 Kenttänäytttösarja 580 sarjaviesteille 5820 580 Sarjaviesti RS-232 tai RS-485 PC
Taitaja semifinaali 2010, Iisalmi Jääkaapin ovihälytin
 Taitaja semifinaali 2010, Iisalmi Jääkaapin ovihälytin Ohjelmointitehtävänä on laatia ohjelma jääkaapin ovihälyttimelle. Hälytin toimii 3 V litium paristolla ja se sijoitetaan jääkaapin sisälle. Hälyttimen
Taitaja semifinaali 2010, Iisalmi Jääkaapin ovihälytin Ohjelmointitehtävänä on laatia ohjelma jääkaapin ovihälyttimelle. Hälytin toimii 3 V litium paristolla ja se sijoitetaan jääkaapin sisälle. Hälyttimen
Vapaa-asennon automaattikytkentä
 Taustaa Taustaa Vapaa-asennon automaattikytkentää ohjataan BCI-ohjausyksiköllä (Bodywork Communication Interface, päällirakenteen tietoliikenneliittymä). Vapaa-asennon automaattikytkentä voidaan aktivoida
Taustaa Taustaa Vapaa-asennon automaattikytkentää ohjataan BCI-ohjausyksiköllä (Bodywork Communication Interface, päällirakenteen tietoliikenneliittymä). Vapaa-asennon automaattikytkentä voidaan aktivoida
PM10OUT2A-kortti. Ohje
 PM10OUT2A-kortti Ohje Dokumentin ID 6903 V3 13.4.2015 Sisällysluettelo Sisällysluettelo... 2 Esittely... 3 Kortti ja rekisterit... 3 Lähtöviestit... 4 Signaalien kytkeminen... 4 Käyttö... 4 Asetusten tekeminen...
PM10OUT2A-kortti Ohje Dokumentin ID 6903 V3 13.4.2015 Sisällysluettelo Sisällysluettelo... 2 Esittely... 3 Kortti ja rekisterit... 3 Lähtöviestit... 4 Signaalien kytkeminen... 4 Käyttö... 4 Asetusten tekeminen...
TIES530 - Sulautettujen järjestelmien arkkitehtuurit. Jukka Ihalainen, Tietoliikennelaboratorio,
 TIES530 - Sulautettujen järjestelmien arkkitehtuurit Luento 1: Yleistä Jukka Ihalainen, jukka.ihalainen@chydenius.fi Tietoliikennelaboratorio, http://rf.chydenius.fi Kurssin tavoitteet tuntee sulautettujen
TIES530 - Sulautettujen järjestelmien arkkitehtuurit Luento 1: Yleistä Jukka Ihalainen, jukka.ihalainen@chydenius.fi Tietoliikennelaboratorio, http://rf.chydenius.fi Kurssin tavoitteet tuntee sulautettujen
TIEP114 Tietokoneen rakenne ja arkkitehtuuri, 3 op. Assembly ja konekieli
 TIEP114 Tietokoneen rakenne ja arkkitehtuuri, 3 op Assembly ja konekieli Tietokoneen ja ohjelmiston rakenne Loogisilla piireillä ja komponenteilla rakennetaan prosessori ja muistit Prosessorin rakenne
TIEP114 Tietokoneen rakenne ja arkkitehtuuri, 3 op Assembly ja konekieli Tietokoneen ja ohjelmiston rakenne Loogisilla piireillä ja komponenteilla rakennetaan prosessori ja muistit Prosessorin rakenne
Sulautetut järjestelmät
 1 Sulautetut järjestelmät Tietojenkäsittelytieteen koulukunta Sulautetut järjestelmät 2 Sulautetut järjestelmät Tyypillisiä sovelluskohteita» automaattiset tankkausjärjestelmät huoltoasemilla,» mekaanisen
1 Sulautetut järjestelmät Tietojenkäsittelytieteen koulukunta Sulautetut järjestelmät 2 Sulautetut järjestelmät Tyypillisiä sovelluskohteita» automaattiset tankkausjärjestelmät huoltoasemilla,» mekaanisen
Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla.
 Speedohealer V4 Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla. 1. Esipuhe Onnittelemme sinua Speedohealer laitteen oston johdosta. HealTech Electronics Ltd. on omistautunut
Speedohealer V4 Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla. 1. Esipuhe Onnittelemme sinua Speedohealer laitteen oston johdosta. HealTech Electronics Ltd. on omistautunut
Korotettu joutokäynti
 Taustaa Taustaa Korotettua joutokäyntitoimintoa ohjataan BCI-ohjausyksiköllä (Bodywork Communication Interface, päällirakenteen tietoliikenneliittymä). Toiminto voidaan aktivoida joko analogisilla signaaleilla
Taustaa Taustaa Korotettua joutokäyntitoimintoa ohjataan BCI-ohjausyksiköllä (Bodywork Communication Interface, päällirakenteen tietoliikenneliittymä). Toiminto voidaan aktivoida joko analogisilla signaaleilla
Jaetun muistin muuntaminen viestin välitykseksi. 15. lokakuuta 2007
 Jaetun muistin muuntaminen viestin välitykseksi Otto Räsänen 15. lokakuuta 2007 1 Motivaatio 2 Valtuuden välitys Peruskäsitteitä 3 Kolme algoritmia Valtuuden välitys käyttäen laskuria ilman ylärajaa Valtuuden
Jaetun muistin muuntaminen viestin välitykseksi Otto Räsänen 15. lokakuuta 2007 1 Motivaatio 2 Valtuuden välitys Peruskäsitteitä 3 Kolme algoritmia Valtuuden välitys käyttäen laskuria ilman ylärajaa Valtuuden
SUPIKOIRA-projekti. Tommi Berg Eero Alkkiomäki. (Tero Huttunen, Sami Kiiskilä, Ossi Mäkinen, Ilpo Suominen, Mikko Suominen, Asser Vuola)
") SUPIKOIRA-projekti Tommi Berg Eero Alkkiomäki (Tero Huttunen, Sami Kiiskilä, Ossi Mäkinen, Ilpo Suominen, Mikko Suominen, Asser Vuola) Mistä on kyse? Pienoisrakettiharrastus heräämässä Suomessa (SATS,
SUPIKOIRA-projekti Tommi Berg Eero Alkkiomäki (Tero Huttunen, Sami Kiiskilä, Ossi Mäkinen, Ilpo Suominen, Mikko Suominen, Asser Vuola) Mistä on kyse? Pienoisrakettiharrastus heräämässä Suomessa (SATS,
Kojemeteorologia. Sami Haapanala syksy 2013. Fysiikan laitos, Ilmakehätieteiden osasto
 Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Kojemeteorologia, 3 op 9 luentoa, 3 laskuharjoitukset ja vierailu mittausasemalle Tentti Oppikirjana Rinne & Haapanala:
Kojemeteorologia Sami Haapanala syksy 2013 Fysiikan laitos, Ilmakehätieteiden osasto Kojemeteorologia, 3 op 9 luentoa, 3 laskuharjoitukset ja vierailu mittausasemalle Tentti Oppikirjana Rinne & Haapanala:
Käyttäjän käsikirja WTN radiomajakka. Version: FIN180427
 Version: FIN180427 Käyttäjän 1 käsikirja Sisällys 1 WTN-Radiomajakka Näytöt ja näppäimet... 3 2 Käynnistys ja toiminta-aika... 4 2.1 WTN-laitteen käynnistys... 4 2.2 WTN-laitteen sammutus... 4 2.3 Virransyöttö:...
Version: FIN180427 Käyttäjän 1 käsikirja Sisällys 1 WTN-Radiomajakka Näytöt ja näppäimet... 3 2 Käynnistys ja toiminta-aika... 4 2.1 WTN-laitteen käynnistys... 4 2.2 WTN-laitteen sammutus... 4 2.3 Virransyöttö:...
Nopea tiedonkeruulaitteisto radiokanavamittauksiin
 19.10.1998 Nopea tiedonkeruulaitteisto radiokanavamittauksiin Matti Leppänen (TKK/IRC/Sovellettu elektroniikka) Kimmo Kalliola (TKK/IRC/Radiolaboratorio) 1 Johdanto Tämän raportin tavoitteena on esitellä
19.10.1998 Nopea tiedonkeruulaitteisto radiokanavamittauksiin Matti Leppänen (TKK/IRC/Sovellettu elektroniikka) Kimmo Kalliola (TKK/IRC/Radiolaboratorio) 1 Johdanto Tämän raportin tavoitteena on esitellä
- Käyttäjä voi valita halutun sisääntulon signaalin asetusvalikosta (esim. 0 5V, 0 10 V tai 4 20 ma)
") LE PSX DIN kisko kiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 3 numeron LED näyttö - Selkeä rakenne, yksinkertainen käyttää
LE PSX DIN kisko kiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 3 numeron LED näyttö - Selkeä rakenne, yksinkertainen käyttää
Arduino. Kimmo Silvonen (X)
") Arduino Kimmo Silvonen (X) Arduino, toimiva oma versio (osat Pajalla) ATmega 328P IC DIL-kotelossa (DIP) päältä katsottuna, Arduinon pinnit +5 V TX RX DTR FT232 10k 22p 22p Reset 1 RX D0 TX D1 D2 PWM D3
Arduino Kimmo Silvonen (X) Arduino, toimiva oma versio (osat Pajalla) ATmega 328P IC DIL-kotelossa (DIP) päältä katsottuna, Arduinon pinnit +5 V TX RX DTR FT232 10k 22p 22p Reset 1 RX D0 TX D1 D2 PWM D3
LANGATTOMAN LIIKEMITTAUKSEN KEHITTÄMINEN
 Jeremias Soini LANGATTOMAN LIIKEMITTAUKSEN KEHITTÄMINEN Case, Wärtsilä Oy, Moottorilaboratorio Tekniikka 2015 2 VAASAN AMMATTIKORKEAKOULU Tietotekniikan koulutusohjelma TIIVISTELMÄ Tekijä Jeremias Soini
Jeremias Soini LANGATTOMAN LIIKEMITTAUKSEN KEHITTÄMINEN Case, Wärtsilä Oy, Moottorilaboratorio Tekniikka 2015 2 VAASAN AMMATTIKORKEAKOULU Tietotekniikan koulutusohjelma TIIVISTELMÄ Tekijä Jeremias Soini
GSM OHJAIN FF KÄYTTÖOHJE PLC MAX S03
 GSM OHJAIN FF KÄYTTÖOHJE PLC MAX S03 TRIFITEK FINLAND OY 2012 V1.0 1. OHJELMISTO; ASENTAMINEN, KÄYTTÖ 1.1 Ohjelmiston asentaminen tietokoneeseen, Ajurin asentaminen Laitteen mukana toimitetaan muistitikulla
GSM OHJAIN FF KÄYTTÖOHJE PLC MAX S03 TRIFITEK FINLAND OY 2012 V1.0 1. OHJELMISTO; ASENTAMINEN, KÄYTTÖ 1.1 Ohjelmiston asentaminen tietokoneeseen, Ajurin asentaminen Laitteen mukana toimitetaan muistitikulla
PAVIRO End Of Line Slave Module
 PAVIRO End Of Line Slave PVA-1WEOL fi Huomautuksia asennuksesta PAVIRO End Of Line Slave Sisällysluettelo fi 3 Sisällysluettelo 1 Tietoja lyhyesti 4 2 Asennus 5 3 Tekniset tiedot 9 4 Standardit ja yhteensopivuus
PAVIRO End Of Line Slave PVA-1WEOL fi Huomautuksia asennuksesta PAVIRO End Of Line Slave Sisällysluettelo fi 3 Sisällysluettelo 1 Tietoja lyhyesti 4 2 Asennus 5 3 Tekniset tiedot 9 4 Standardit ja yhteensopivuus
Jännitelähteet ja regulaattorit
 Jännitelähteet ja regulaattorit Timo Dönsberg ELEC-C5070 Elektroniikkapaja 5.10.2015 Teholähteen valinta Akku vs. verkkosähkö Vaadittu jännite Lähes aina tasasähköä, esim. mikrokontrolleri +5V, OP-vahvistin
Jännitelähteet ja regulaattorit Timo Dönsberg ELEC-C5070 Elektroniikkapaja 5.10.2015 Teholähteen valinta Akku vs. verkkosähkö Vaadittu jännite Lähes aina tasasähköä, esim. mikrokontrolleri +5V, OP-vahvistin
Digitaalitekniikka (piirit) Luku 15 Sivu 1 (17) Salvat ja kiikut 1D C1 C1 1T 1J C1 1K S R
 Luku 15 Sivu 1 (17) Salvat ja kiikut 1D C1 C1 1T 1J C1 1K S R") igitaalitekniikka (piirit) Luku 5 ivu (7).8.24 Fe/AKo C J C K C T C C J C K igitaalitekniikka (piirit) Luku 5 ivu 2 (7).8.24 Fe/AKo Johdanto Tässä luvussa esitetään salpapiirit, jotka ovat yksinkertaisimpia
igitaalitekniikka (piirit) Luku 5 ivu (7).8.24 Fe/AKo C J C K C T C C J C K igitaalitekniikka (piirit) Luku 5 ivu 2 (7).8.24 Fe/AKo Johdanto Tässä luvussa esitetään salpapiirit, jotka ovat yksinkertaisimpia
Ongelma(t): Miten tietokoneen komponentteja voi ohjata siten, että ne tekevät yhdessä jotakin järkevää? Voiko tietokonetta ohjata (ohjelmoida) siten,
: Miten tietokoneen komponentteja voi ohjata siten, että ne tekevät yhdessä jotakin järkevää? Voiko tietokonetta ohjata (ohjelmoida) siten,") Ongelma(t): Miten tietokoneen komponentteja voi ohjata siten, että ne tekevät yhdessä jotakin järkevää? Voiko tietokonetta ohjata (ohjelmoida) siten, että se pystyy suorittamaan kaikki mahdolliset algoritmit?
Ongelma(t): Miten tietokoneen komponentteja voi ohjata siten, että ne tekevät yhdessä jotakin järkevää? Voiko tietokonetta ohjata (ohjelmoida) siten, että se pystyy suorittamaan kaikki mahdolliset algoritmit?
ETT harjoitustyö: Sovitin 1-Wire-väylään
 ETT harjoitustyö: Sovitin 1-Wire-väylään Kalle Tuulos 22. helmikuuta 2002 Sisältö 1 Johdanto 1 2 1-Wire-väylän lyhyt esittely 1 3 Vaatimukset rakennettavalle laitteistolle 2 4 Laitteiston toteutus 2 4.1
ETT harjoitustyö: Sovitin 1-Wire-väylään Kalle Tuulos 22. helmikuuta 2002 Sisältö 1 Johdanto 1 2 1-Wire-väylän lyhyt esittely 1 3 Vaatimukset rakennettavalle laitteistolle 2 4 Laitteiston toteutus 2 4.1
P89LPC935-MIKROKONTROLLERIN OMINAISUUDET JA KÄYTTÖ
 TAMPEREEN AMMATTIKORKEAKOULU Tietotekniikan koulutusohjelma Tietokonetekniikan suuntautumisvaihtoehto P89LPC935-MIKROKONTROLLERIN OMINAISUUDET JA KÄYTTÖ Tutkintotyö, joka on jätetty opinnäytteenä tarkastettavaksi
TAMPEREEN AMMATTIKORKEAKOULU Tietotekniikan koulutusohjelma Tietokonetekniikan suuntautumisvaihtoehto P89LPC935-MIKROKONTROLLERIN OMINAISUUDET JA KÄYTTÖ Tutkintotyö, joka on jätetty opinnäytteenä tarkastettavaksi
9.6 Kannettava testilaite
 9.6 Kannettava testilaite Kannettavalla testilaitteella testataan ylivirtalaukaisimen, energia- ja virtamuuntimien, laukaisumagneetin F5 sekä mittausarvojen näytön oikea toiminta. 9.6.1 Ulkonäkö (1) LED
9.6 Kannettava testilaite Kannettavalla testilaitteella testataan ylivirtalaukaisimen, energia- ja virtamuuntimien, laukaisumagneetin F5 sekä mittausarvojen näytön oikea toiminta. 9.6.1 Ulkonäkö (1) LED
Sekvenssipiirin tilat
 igitaalitekniikka (piirit) Luku Täsmätehtävä Tehtävä Sekvenssipiirin tilat Montako tilaa vähintään tarvitaan seuraavissa sekvenssipiireissä: Painikkeella ohjattava lampun sytytys ja sammutus. Näyttöä ohjaava
igitaalitekniikka (piirit) Luku Täsmätehtävä Tehtävä Sekvenssipiirin tilat Montako tilaa vähintään tarvitaan seuraavissa sekvenssipiireissä: Painikkeella ohjattava lampun sytytys ja sammutus. Näyttöä ohjaava
Käyttäjän opas Kaukosäädin Invest Living ROOM 5
 Käyttäjän opas Kaukosäädin Invest Living ROOM 5 Scandinavian heat pumps Sisältö. Kaukosäätimen kuvaus. Painikkeet -5. Kaukosäätimen kuvakkeet 6 4. Painikkeiden käyttö 7-8 (AUTO/JÄÄHDYTYS/LÄMMITYS/TUULETIN/KOSTEUDENPOISTO)
Käyttäjän opas Kaukosäädin Invest Living ROOM 5 Scandinavian heat pumps Sisältö. Kaukosäätimen kuvaus. Painikkeet -5. Kaukosäätimen kuvakkeet 6 4. Painikkeiden käyttö 7-8 (AUTO/JÄÄHDYTYS/LÄMMITYS/TUULETIN/KOSTEUDENPOISTO)
Taitaja2005/Elektroniikka. 1) Resistanssien sarjakytkentä kuormittaa a) enemmän b) vähemmän c) yhtä paljon sähkölähdettä kuin niiden rinnankytkentä
 Resistanssien sarjakytkentä kuormittaa a) enemmän b) vähemmän c) yhtä paljon sähkölähdettä kuin niiden rinnankytkentä") 1) Resistanssien sarjakytkentä kuormittaa a) enemmän b) vähemmän c) yhtä paljon sähkölähdettä kuin niiden rinnankytkentä 2) Kahdesta rinnankytketystä sähkölähteestä a) kuormittuu enemmän se, kummalla on
1) Resistanssien sarjakytkentä kuormittaa a) enemmän b) vähemmän c) yhtä paljon sähkölähdettä kuin niiden rinnankytkentä 2) Kahdesta rinnankytketystä sähkölähteestä a) kuormittuu enemmän se, kummalla on
Ulkoiset laitteet. Käyttöopas
 Ulkoiset laitteet Käyttöopas Copyright 2007 Hewlett-Packard Development Company, L.P. Windows on Microsoft Corporationin Yhdysvalloissa rekisteröimä tavaramerkki. Tässä olevat tiedot voivat muuttua ilman
Ulkoiset laitteet Käyttöopas Copyright 2007 Hewlett-Packard Development Company, L.P. Windows on Microsoft Corporationin Yhdysvalloissa rekisteröimä tavaramerkki. Tässä olevat tiedot voivat muuttua ilman
- Käyttäjä voi valita halutun sisääntulon signaalin asetusvalikosta (esim. 0 5V, 0 10 V tai 4 20 ma)
") LE PDX DIN kiskokiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 4 numeroinen LED näyttö - Selkeä rakenne, yksinkertainen käyttää
LE PDX DIN kiskokiinnitys Ominaisuudet ja edut - Ohjelmoitavissa haluttuihin arvoihin - Itsenäiset säädöt (esim. ramp up & ramp down) - Kirkas 4 numeroinen LED näyttö - Selkeä rakenne, yksinkertainen käyttää
25.11.2014. Työasema- ja palvelinarkkitehtuurit IC130301. Tallennusjärjestelmät. Tallennusjärjestelmät. 5 opintopistettä.
 Työasema- ja palvelinarkkitehtuurit IC130301 5 opintopistettä Petri Nuutinen 5 opintopistettä Petri Nuutinen Tallennusjärjestelmät Tallennusjärjestelmät 1 = Small Computer System Interface, markkinoilla
Työasema- ja palvelinarkkitehtuurit IC130301 5 opintopistettä Petri Nuutinen 5 opintopistettä Petri Nuutinen Tallennusjärjestelmät Tallennusjärjestelmät 1 = Small Computer System Interface, markkinoilla
Pulssilaskuri ja I/O-konvertteri. Käyttöohje Versio 1.2
 SATEL i-link MODBUS Pulssilaskuri ja I/O-konvertteri Käyttöohje Versio 1.2 SISÄLLYS SISÄLLYS... 2 TÄRKEÄ HUOMAUTUS... 3 VALMISTAJAN VAKUUTUS... 4 TAKUU JA TURVALLISUUSOHJEET... 5 1 YLEISTÄ... 6 1.1 SATEL
SATEL i-link MODBUS Pulssilaskuri ja I/O-konvertteri Käyttöohje Versio 1.2 SISÄLLYS SISÄLLYS... 2 TÄRKEÄ HUOMAUTUS... 3 VALMISTAJAN VAKUUTUS... 4 TAKUU JA TURVALLISUUSOHJEET... 5 1 YLEISTÄ... 6 1.1 SATEL
Arto Salminen,
 2. Luento: Laitteistorajapinta Arto Salminen, arto.salminen@tut.fi Agenda Arkkitehtuuri Keskeytysjärjestelmä Oheislaiteliitynnät Oheislaitepiirejä Arkkitehtuuri Rekisterirakenteet ja keskeytysjärjestelmä
2. Luento: Laitteistorajapinta Arto Salminen, arto.salminen@tut.fi Agenda Arkkitehtuuri Keskeytysjärjestelmä Oheislaiteliitynnät Oheislaitepiirejä Arkkitehtuuri Rekisterirakenteet ja keskeytysjärjestelmä
Tiedonkeruu ja analysointi
 Tiedonkeruu ja analysointi ViDRoM Virtual Design of Rotating Machines Raine Viitala 30.9.2015 ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat
Tiedonkeruu ja analysointi ViDRoM Virtual Design of Rotating Machines Raine Viitala 30.9.2015 ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat
Toimintaperiaate: 2. Kytke virta vastaanottimeen käyttämällä virtalaitetta, jossa on merkintä "horsealarm receiver only".
 Toimintaperiaate: 1. Kytke virta toistimeen käyttämällä virtalaitetta, jossa on merkintä "RadioLink only". Kun virta on kytketty toistimeen, laitteen vihreä valo välähtää. 2. Kytke virta vastaanottimeen
Toimintaperiaate: 1. Kytke virta toistimeen käyttämällä virtalaitetta, jossa on merkintä "RadioLink only". Kun virta on kytketty toistimeen, laitteen vihreä valo välähtää. 2. Kytke virta vastaanottimeen
07.02.2006 Nokeval Oy. Käyttöohje 7181
 07.02.2006 Nokeval Oy Käyttöohje 7181 Sisällysluettelo 1 Yleiskuvaus... 3 2 Tekniset tiedot... 4 3 Käyttöönotto... 5 3.1 Jumpperiasetukset... 5 3.2 Riviliitinkytkennät... 6 3.3 Asettelut... 7 3.3.1 Sarjaliikenne...
07.02.2006 Nokeval Oy Käyttöohje 7181 Sisällysluettelo 1 Yleiskuvaus... 3 2 Tekniset tiedot... 4 3 Käyttöönotto... 5 3.1 Jumpperiasetukset... 5 3.2 Riviliitinkytkennät... 6 3.3 Asettelut... 7 3.3.1 Sarjaliikenne...
NiMH Laturi. Suunnittelu Olli Haikarainen
 Suunnittelu Olli Haikarainen NiMH Laturi Ostettuani digitaalikameran totesin sen kuluttavan niin paljon virtaa että on aika siirtyä käyttämään ladattavia akkuja. Ostin neljä kappaletta 1850 ma tunnin akkuja
Suunnittelu Olli Haikarainen NiMH Laturi Ostettuani digitaalikameran totesin sen kuluttavan niin paljon virtaa että on aika siirtyä käyttämään ladattavia akkuja. Ostin neljä kappaletta 1850 ma tunnin akkuja
Ulkoiset laitteet Käyttöopas
 Ulkoiset laitteet Käyttöopas Copyright 2008 Hewlett-Packard Development Company, L.P. Tässä olevat tiedot voivat muuttua ilman ennakkoilmoitusta. Ainoat HP:n tuotteita ja palveluja koskevat takuut mainitaan
Ulkoiset laitteet Käyttöopas Copyright 2008 Hewlett-Packard Development Company, L.P. Tässä olevat tiedot voivat muuttua ilman ennakkoilmoitusta. Ainoat HP:n tuotteita ja palveluja koskevat takuut mainitaan
Virheen kasautumislaki
 Virheen kasautumislaki Yleensä tutkittava suure f saadaan välillisesti mitattavista parametreistä. Tällöin kokonaisvirhe f määräytyy mitattujen parametrien virheiden perusteella virheen kasautumislain
Virheen kasautumislaki Yleensä tutkittava suure f saadaan välillisesti mitattavista parametreistä. Tällöin kokonaisvirhe f määräytyy mitattujen parametrien virheiden perusteella virheen kasautumislain
KÄYTTÖOHJE PEL 1000 / PEL 1000-M
 V1.0 (19.02.2015) 1 (8) KÄYTTÖÖNOTTO Asennus - Lähetin tulisi asentaa mittauskohdan yläpuolelle kondensoitumisongelmien välttämiseksi. - Kanavan ylipaine mitataan siten, että kanavan mittayhde yhdistetään
V1.0 (19.02.2015) 1 (8) KÄYTTÖÖNOTTO Asennus - Lähetin tulisi asentaa mittauskohdan yläpuolelle kondensoitumisongelmien välttämiseksi. - Kanavan ylipaine mitataan siten, että kanavan mittayhde yhdistetään
Ulkoiset laitteet. Asiakirjan osanumero: Tässä oppaassa kerrotaan lisävarusteina saatavien ulkoisten laitteiden käytöstä.
 Ulkoiset laitteet Asiakirjan osanumero: 430221-351 Tammikuu 2007 Tässä oppaassa kerrotaan lisävarusteina saatavien ulkoisten laitteiden käytöstä. Sisällysluettelo 1 USB-laitteen käyttäminen USB-laitteen
Ulkoiset laitteet Asiakirjan osanumero: 430221-351 Tammikuu 2007 Tässä oppaassa kerrotaan lisävarusteina saatavien ulkoisten laitteiden käytöstä. Sisällysluettelo 1 USB-laitteen käyttäminen USB-laitteen