Antti Kokko. Formula Student -kilpa-auton rungon valmistustarkkuuden todentaminen 3D-skannauksen avulla
|
|
|
- Anne Virtanen
- 6 vuotta sitten
- Katselukertoja:
Transkriptio

1 Antti Kokko Formula Student -kilpa-auton rungon valmistustarkkuuden todentaminen 3D-skannauksen avulla Metropolia Ammattikorkeakoulu Autoinsinööri Auto- ja kuljetustekniikka Insinöörityö
2 Tiivistelmä Tekijä(t) Otsikko Sivumäärä Aika Antti Kokko Formula Student -kilpa-auton rungon valmistustarkkuuden todentaminen 3D-skannauksen avulla 30 sivua + 2 liitettä Tutkinto Insinööri (AMK) Koulutusohjelma Auto- ja kuljetustekniikka Suuntautumisvaihtoehto Tuotetekniikka Ohjaaja(t) Tuntiopettaja Pasi Oikarinen Insinöörityössä tarkastellaan Formula Student -sarjassa kilpailevan HPF011-kilpa-auton rungon valmistustarkkuutta 3D-skannauksen avulla. Työn tarkoituksena on etsiä putkirungon valmistuksessa syntyneitä valmistusteknisiä virheitä. Työssä selvitetään myös, miten virheet ovat mahdollisesti aiheutuneet ja miten ne vaikuttavat auton ominaisuuksiin. Kun virheiden aiheuttajat on saatu selville, pystytään samankaltaisten virheiden tekemistä välttämään seuraavien runkojen valmistus- sekä suunnitteluvaiheissa. Putkirungon valmistuksessa syntyneitä poikkeamia tarkastellaan vertaamalla digitoitua mallia suunniteltuun CAD-malliin. Työssä käydään läpi digitointitapahtuman eri vaiheet, sekä esitetään kuinka digitoidun mallin vertaaminen suunniteltuun CAD-mallin tapahtuu. Lisäksi työssä esitellään 3D-skannauksen ja optisen mittaamisen perusperiaatteita sekä esitellään pääpiirteittäin saksalaisen GOMin valmistamia mittalaitteita, joilla formula-auton rungon mittaus on suoritettu. Työn tuloksena rungosta saatiin tietokoneelle mittatarkka 3D-malli, jota CAD-malliin vertaamalla tutkittiin valmistusvirheitä. Rungosta löytyi muutamia selviä valmistuksessa syntyneitä poikkeamia. Myös poikkeamien aiheuttajat pystyttiin kartoittamaan. Poikkeamien vaikutukset auton ominaisuuksiin todettiin kuitenkin verrattain pieniksi. Avainsanat 3D-skannaus, digitointi, optinen mittaustekniikka
3 Abstract Author(s) Title Number of Pages Date Antti Kokko Verification of Fabrication Accuracy of the Frame for a Formula Student Race Car with 3D-scanner 30 pages + 2 appendices 16 Oct 2012 Degree Bachelor of Engineering Degree Programme Automotive and Transport Engineering Specialisation option Automotive Design Engineering Instructor(s) Pasi Oikarinen, Lecturer Fabrication accuracy of the frame of a HPF011 race car, which participates in the Formula Student race series, was verificated with 3D-scanner in this Bachelor s thesis. The aim of this thesis was to find errors that occurred during the fabrication process. How the errors occurred and what their effects on the car were, is also analyzed in this thesis. When the sources of failures are found, errors can be avoided when designing and fabricating a new frame. Deviations which occurred during the fabrication process of the tubular frame were inspected by comparing the digitized model to the CAD-model. This thesis describes the various steps of the digitizing process and presents how comparison between the digitized model and the CAD-model is carried out. In addition, the basic principles of 3D-scanning and optical measuring are presented in this thesis. Also measuring devices made by the German GOM, which was used to measure the frame of the Formula car, are presented in the outline. As a result of this thesis an accurate 3D computer model was created and it was compared to the CAD-model. There were few clear deviations on the frame which had occurred in the fabrication process. The sources of deviations were also clarified. However, the effects of the deviations on the car were comparatively small. Keywords 3D-scanning, digitizing, optical measurement technique
4 Sisällys 1 Johdanto 1 2 Mittalaitteet ATOS Triple Scan II -3D-skanneri Toimintaperiaate Kolmiomittaus TRITOP Toimintaperiaate Fotogrammetria Stereonäkö ja stereokuva 10 3 Rungon mittaus Digitointi Skannauksen vertaaminen CAD-malliin 15 4 Tulokset Runko Alustapisteiden tarkastelu Jousituksen keinuvivut 24 5 Yhteenveto 27 Lähteet 29 Liitteet Liite 1. Rungon mittaraportti Liite 2. Linkkujen mittaraportit
5 1 1 Johdanto Formula Student on yliopistojen ja ammattikorkeakoulujen välinen kilpasarja. Kilpasarja on saanut alkunsa 1970-luvun lopulla, jolloin Amerikan autoinsinöörien järjestö kehitti USA:n yliopistojen autotekniikan opiskelijoille kilpailun, jossa opiskelijoiden on tarkoitus suunnitella ja rakentaan yksipaikkainen formulatyyppinen kilpa-auto. Kilpailuluokan nimi oli aluksi SAE Mini Indy. Myöhemmin nimeksi tuli nykysinkin Yhdysvalloissa käytössä oleva Formula SAE. Vuosituhannen vaihteessa kilpailuja alettiin järjestää myös Pohjois-Amerikan ulkopuolella. Euroopan suurimmat kilpailut ovat Formula Student (FS) Englannissa sekä Formula Student Germany (FSG) Saksassa. Kilpailussa arvostellaan auton nopeuden lisäksi myös opiskelijoiden tekemiä teknisiä ratkaisuja sekä markkinoinnin ja kustannuslaskennan osaamista. Vuodesta 2000 lähtien Formula Studentin suosio on kasvanut maailmalla räjähdysmäisesti. Koko maailmassa on nykyisin noin 500 FS-tiimiä, ja sarja jatkaa kasvuaan edelleen. Helsingin Metropolia Ammattikorkeakoulu (aikaisemmin Helsingin ammattikorkeakoulu Stadia) on ollut mukana Formula Student -kilpailuissa opiskelijoistaan koostuvalla tiimillä vuodesta 2002 ja rakentanut uuden Formula Student -kilpa-auton lähes joka vuosi. Entinen Stadia Motorsport on vuoden 2008 jälkeen toiminut nimellä Metropolia Motorsport, oppilaitoksen nimen uudistumisen myötä. Uusin valmistunut auto kantaa nimeä HPF011, jonka runko on tämän työn tarkastelun kohteena. Tämän insinöörityön tarkoituksena on tarkastella 3D-skannauksen avulla, onko rakennettu putkirunko suunnitellun 3D-mallin mukainen sekä eroavatko varsinaiset alustapisteiden koordinaatit suunnitelluista pisteistä. Rungon lisäksi tarkastelun kohteena ovat myös linkut eli jousituksen keinuvivut, jotka toimivat iskunvaimentimien ja työntötankojen yhdysvipuina auton runkoon laakeroituina. Kiinnostavin ja tärkein asia linkuissa on iskunvaimentimen, työntötangon sekä runkolaakeroinnin kiinnityspisteiden sijainti toisiinsa nähden. Tämän insinöörityön tarkoituksena on myös selvittää rungon sekä muiden osien valmistuksessa mahdollisesti tapahtuvia virheitä optisen mittaustekniikan menetelmiä käyttäen. Lisäksi pohditaan, mistä mahdolliset virheet ovat voineet aiheutua. Näin voitaisiin eliminoida samojen virheiden aiheuttajat seuraavaa runkoa valmistettaessa.
6 2 Lisäksi työssä tutkitaan, onko mahdollisilla virheillä vaikutusta auton sekä rungon ominaisuuksiin. Rungon mittaaminen suoritettiin saksalaisen GOMin valmistamilla optisilla mittalaitteilla. Rungon digitointi suoritettiin ATOS Triple Scan -3D-skannerilla ja apuna käytettiin TRITOP-koordinaattimittauslaitetta. Rungon vertailu tapahtui vertaamalla CAD-mallin ja skannatun mallin pintoja toisiinsa, kun rungot ovat samassa koordinaatistossa. Alustapisteiden sijaintia tutkittiin vertaamalla mitattujen pisteiden koordinaatteja suunniteltujen pisteiden koordinaatteihin kun skannattu ja suunniteltu runko ovat samassa koordinaatistossa. Samaan koordinaatistoon rungot asetettiin skannerin ohjelmiston avulla automaattisesti. 3D-skannauksessa skannattavasta kohteesta muodostetaan todellisuutta vastaava mittatarkka digitaalinen malli. Optinen 3D-skannaus on saanut alkunsa autoteollisuudesta. Useat autotehtaat käyttävät 3D-skannereita korin osien mittaamiseen ja laadunvarmistamiseen valmistuksen aikana. Optisen mittaamisen hyviä puolia ovat nopea ja tarkka mittaaminen, ilman että kappaleeseen tarvitsee koskettaa. Yleisempiä 3D-skannauksen käyttökohteita ovat käänteinen suunnittelu, jossa kappale skannataan ja siitä luodaan 3D-mallin avulla mittapiirrustukset valmistusta varten kappaleiden digitointi, esimerkiksi historiallisten patsaiden tai muiden esineiden turvallinen kopioiminen digitaaliseen muotoon laadun varmistus, jossa skannattua kappaletta verrataan suunniteltuun CADmalliin mahdollisten valmistusvirheiden varalta, kuten tässä työssä tehtiin kappaleen mittaaminen, jossa skannatusta kappaleesta halutaan ottaan sellaisia mittoja, mihin muilla mittausmenetelmillä on vaikea päästä.
7 3 Laadunvarmistus on olennainen osa valmistusprosessia niin autoteollisuudessa kuin muussakin teollisuudessa. Samankaltaista rungon mittausta ei Metropolia Motorsportin yli 10 vuotisen historian aikana ole koskaan tehty. Myöskään kukaan Formula Student sarjassa ei tiettävästi ole vastaavan laajuista rungon mittausta aikaisemmin tehnyt. Tämän insinöörityön mittaustuloksia käytettiin myös vuoden 2012 toukokuussa järjestetyissä Formula Student kilpailuissa Yhdysvalloissa sekä Kanadassa tuomareille esiteltävänä design -materiaalina. Metropolia Motorsportin osa-aluepäälliköt Markus Ketonen (runko) ja Toni Ristolainen (alusta) toimivat asiantuntija-apuna rungon sekä tukivarsikiinnikkeiden valmistusvirheiden tarkastelussa. 2 Mittalaitteet 2.1 ATOS Triple Scan II -3D-skanneri Toimintaperiaate ATOS -3D-skannerin toiminta perustuu kolmiomittaamiseen kahden kameran ja valonlähteen avulla. Projektori projisoi valojuovaston mitattavan kohteen pinnalle, jonka kamerat havaitsevat. Optisiin muunnosyhtälöihin perustuen tietokone laskee automaattisesti 3D-koordinaatit jokaiselle kameran pikselille korkealla tarkkuudella. Tämä stereokamerajärjestelmä ja valonlähteenä toimiva projektoriyksikkö on intergoitu samaan pakettiin. [1, s. 1.] ATOS Triple Scan II on varustettu kahdella 5 megapikselin kameralla. Valonlähteenä toimii edellisten mallien valkoisen valon sijaan sininen LED-valo. Sinistä valoa käytettäessä ympäristön valaistusolosuhteet eivät pääse vaikuttamaan mittausprosesssiin. LED-tekniikka ei myöskään vaadi samanlaista jäähdytystä kuin perinteinen projektorin lamppu, joten ATOS Triple Scan II on myös huomattavasti hiljaisempi verrattuna GOMin valmistamiin vanhempiin skannereihin.

![pinnasta. Kuva 1. Valojuovat kappaleen pinnalla [2]. Kuva 2. Mittaustapahtuma [3, s. 5].](/docs-images/71/65676705/images/8-1.jpg "Mitattavan kappaleen pinnalle tai sen ympäristöön kiinnitetään tarralappuja, jotka toimivat referenssipisteinä mittauksen aikana.")
8 4 Kuvasta 1 ja 2 nähdään, kuinka mittausprosessissa mitattava kohde valaistaan valojuovilla. Kamerat kaappaavat kuvia ja näkevät juovien kulun muutokset kohteen pinnalla. Kun kameroiden väliset kulmat ja etäisyys tiedetään, skanneri osaa laskea valojuovien pinnalta löytyneiden pisteiden koordinaatit skanneriin nähden ja luoda näin pistepilven tietokoneelle kuvatusta pinnasta. Kuva 1. Valojuovat kappaleen pinnalla [2]. Kuva 2. Mittaustapahtuma [3, s. 5]. Mitattavan kappaleen pinnalle tai sen ympäristöön kiinnitetään tarralappuja, jotka toimivat referenssipisteinä mittauksen aikana. Skannerin ohjelmisto yhdistää pinnasta otetut useat kuvat yhdeksi otokseksi samaan koordinaatistoon referenssipisteiden avulla. Jos pisteitä kiinnitetään kappaleen ympäristöön, täytyy muistaa, että silloin kappaletta ei saa liikuttaa kuvien ottamisen välissä, koska kappaleen paikka muuttuu koordinaatistossa referenssipisteisiin nähden. Skannauksen voi myös suorittaa kokonaan ilman referenssipisteitä, jolloin ohjelma etsii eri kaappauksista samoja pintoja, jotka se yhdistää toisiinsa pintojen muotojen perusteella.
9 5 Riippuen mitattavan kappaleen koosta ja halutusta mittatarkkuudesta, skannerissa voidaan käyttää eri mittavolyymeja. Rungon mittaamiseen mielestäni sopivimmat vaihtoehdot olivat MV560 ja MV1500. Mittavolyymin numero merkitsee mitattavan alan sivunpituutta. MV560 on tarkempi, mutta kuvaa pienemmän alueen kerrallaan. MV1500 hieman epätarkempi mutta nopeampi, koska kameroiden kerralla kuvaama alue on suurempi. Valitsin MV560-mittavolyymin sen paremman tarkkuuden takia, koska rungossa oli kiinnikkeitä, jotka oli hyvä saada mitattua yksityiskohtaisesti. Kyseistä mittavolyymia käytettäessä suurin mahdollinen mittaepätarkkuus puolen metrin matkalla on 0,011 mm [4, s. 4]. Noin 2-metrisen rungon mittaamisessa mittaepätarkkuutta rungon pituuteen voi tulla enintään neljä sadasosamillimetriä. Kun halutaan mitata pienempiä kappaleita, voidaan käyttää pienempää mittavolyymia. Mittavolyymin vaihto tapahtuu vaihtamalla skannerin kameroiden linssit. Pienempää mittavolyymia käytettäessä mitattava alue on pienempi, jolloin kameroiden megapikselit asettuvat pienemmälle alueelle ja kuvat ovat siten tarkemipia. Seuraavaksi pienemmällä mittavolyymilla MV170 mittaepätarkkuus on 0,001 mm [5, s. 4]. Pienin skanneriin saatava mittavolyymi on MV Kolmiomittaus Trigonometriassa ja geometriassa kolmiomittauksella tarkoitetaan prosessia, jossa määritetään pisteen etäisyys mittaamalla kulmat pisteeseen nähden kahdesta ennalta tunnetusta pisteestä. Kolmiomittaus on kehitetty Hollannissa 1600-luvun alkupuolella. Kolmiomittausta käytetään yleisesti maaston mittauksissa; tällä menetelmällä voidaan mitata sekä etäisyyksiä että maanpinnan korkeuksia. Koska menetelmä perustuu näköyhteyteen kiintopisteiden välillä, maanmittauksien avuksi on rakennettu korkeita kolmiomittaustorneja. Se on ollut yksi tärkeimmistä maanmittausmenetelmistä ennen satelliittijärjestelmän tuloa 1980-luvulla. [6] Kolmiomittausta voidaan käyttää koordinaattien laskemiseen. Kuvan 3 esimerkissä lasketaan laivan etäisyys rannasta. Pisteessä A mitataan kulma α eli pisteen B ja laivan välinen kulma. Vasvaavasti mitataan kulma β pisteessä B. Kun pisteiden A ja B koordinaatit tai niiden välimatka tunnetaan, sinilauseen perusteella on laskettavissa laivan sijaintipiste C sekä laivan etäisyys rannasta d.

 Nyt voidaan laskea pisteen C etäisyys pisteistä A ja B sinilauseen avulla.")
10 6 Kuva 3. Kun kulmat α ja β tunnetaan, voidaan komion kolmas kulma pisteessä C laskea kolmion kulmasumman perusteella. γ = ( β + α ) Nyt voidaan laskea pisteen C etäisyys pisteistä A ja B sinilauseen avulla. AC = * AB BC = * AB Kun pisteiden A ja C sekä pisteiden B ja C väliset matkat tunnetaan, voidaan laskea etäisyys d perustrigonometrian avulla. Esimerkiksi d = BC * sin β

11 7 2.2 TRITOP Toimintaperiaate Tritop koordinaattimittauslaitteen toiminta perustuu fotogrammetriaan. Järjestelämälllä voidaan mitata suuria kappaleita, kuten autoja, junan vaunuja, veneitä ja lentokoneita. Järjestelmää käytetään myös referenssipisteiden etukäteen tallentamiseen ATOS -3Dskannerin apuna. Kun pisteet on valmiiksi kuvattu, skannaustapahtuma on nopeampi ja mittavirheiden mahdollisuus pienenee. Tästä johtuen rungon skannauksen apuna käytettiin kyseistä järjestelmää. Tritopilla otettujen kuvien avulla muuten harmaaseen skannausdataan voidaan lisätä myös kohteen oikeat värit. Teollisuudessa tästä ei ole juuri hyötyä, mutta historiallisten esineiden digitoinnissa tai muussa taiteellisessa yhteydessä tätä menetelmää käytetään. Mittaustapahtuma on yksinkertainen. Kuvattavaan kohteeseen ja sen ympäristöön asetetaan koodattuja pisteitä ja mittasauvat (kuva 4 ja kuva 5), jotka ovat valmiiksi kalibroitu Tritop-ohjelmistoon, sekä referenssipisteitä jotka tallentuvat 3Dkoordinaatistoon. Mittasauvojen tarkoitus on antaa kameralle referenssimitta. Tämän jälkeen kohteesta aletaan ottaa kuvia kameralla, joka siirtää kuvat langattomasti tietokoneelle. Kuvia pyritään ottamaan niin, että uudessa kuvassa näkyisi aina viisi koodattua pistettä, jotka ovat olleet aikaisemmin otetuissa kuvissa. Näin tietokone pystyy asettamaan kaikki kohteesta otetut kuvat samaan kohdekoordinaatistoon merkattujen pisteiden avulla. Kuva 4. Koodatut pisteet


12 8 Kuva 5. Mittasauvat ja koodatut pisteet aseteltuna Tritop järjestelmään kuuluu digitaalijärjestelmäkamera, tietokone, ohjelmisto sekä kalibtointivälineet (kuva 6). Kuva 6. Tritop Fotogrammetria Fotogrammetrialla tarkoitetaan menetelmää, jolla tutkitaan mitattavan kohteen muotoja siitä otettujen valokuvien perusteella. Termi fotogrammetria, englanniksi photogrammetry, on yhdeydessä kolmeen kreikankieliseen sanaan: photos tarkoittaa valoa, gramma tallennusta, ja metreo mittausta. [7, s. 2.] Tyypillisimpiä fotogrammetrian avulla tehtyjä tuotoksia ovat kartat, piirrokset ja 3Dmallit, joistain todellisista kappaleista, maisemista tai maastosta. Useimmat nykyaikaiset kartat on valmistettu fotogrammetriaa käyttäen lentokoneesta kuvaamalla.

13 9 Fotogrammetriaa hyödynnetään myös rakennusten ja muiden arkkitehtuuristen kohteiden 3D-mallintamiseen. Muita yleisiä käyttökohteita fotogrammetrialle ovat rikospaikka- ja onnettomuuspaikkatutkimukset sekä geologiset tutkimukset. [8] Valokuvauksessa muutetaan oikea 3D-maailma 2D-kuviksi. Tässä tapahtumassa häviää joitakin tietoja kohteesta, ensisijaisesti syvyystiedot. Fotgrammetriaa voidaan pitää käänteisenä tapahtumana valokuvaamiselle, koska siinä muutetaan 2D-kuvat takaisin 3D-muotoon. Koska valokuvausprosessissa häviää tietoja kohteesta, ei yksi 2D-kuva riitä 3D-mallin muodostamiseen. Kohteesta vaaditaan teoriassa vähintään kaksi kuvaa eri kuvakulmista otettuna, jotta saadaan rakennettua todellisuutta vastaava 3D-malli kuvatusta kohteesta. Todellisuudessa kaksi kuvaa harvoin riittää antamaan riittävästi informaatiota kohteesta, useimmiten tarvitaan siis useampia kuvia. Lopputuloksena useamman kuvan fotogrammetrisista mittauksista ovat kohteesta saadut 3-ulotteiset koordinaatit. [8] Käsiteltäessä 2-ulotteisia kuvia täytyy ohjelman laskea kameran sijainti ja asento avaruudessa kuvanottohetkellä eli orientaatio jokaiselle otetulle kuvalle erikseen mahdollisimman hyvän tarkkuuden aikaan saamiseksi. Tarkka orientaatio saavutetaan kun kuvista pystytään tunnistamaan tarvittava määrä pisteitä. Onnistuneeseen orientaatioon tarvitaan minimissään 5 koodattua pistettä. Kuvassa 7 Tritopjärjestelmään kuuluva risti, jossa yksi koodatuista pisteistä on jäänyt tunnistamatta. Kuva 7. Koodatut pisteet ristissä.
14 Stereonäkö ja stereokuva Kaikki ihmiset, joilla on kaksi tervettä silmää, näkevät ympäristönsä stereoskooppisesti. Kuten 3D-skannerin kamerat, ihmisellä silmät ovat tietyn matkan päässä toisistaan. Ne näkevät kohteen hieman eri kulmista, joten kuvat eroavat hieman toisistaan. Tämän voi todeta vaikka sulkemalla silmiään vuorotellen, pitämällä sormea pystyssä naaman edessä ja vertaamalla näkemäänsä. Näiden eroavaisuuksien avulla aivot muodostavat kolmiulotteisen vaikutelman näkemästään kuvasta. [9] Stereonäkymä voidaan luoda keinotekoisesti ottamalla kohteesta kuva kahdesta eri kohdasta tai kahdella eri kameralla, jotka ovat vähän matkan päässä toisistaan, kuitenkin niin, että kummassakin kuvassa on nähtävissä osittain sama alue. Sitten sopivan laitteiston avulla näytetään oikealle silmälle oikeanpuoleista kuvaa ja vasemmalle silmälle vasemmanpuoleista kuvaa. Kumpikin silmä näkee hieman erilaisen näkymän samasta kohteesta, jolloin aivot tulkitsevat kyseessä olevan todellinen kohde ja muodostavat kolmiulottoisen kuvan näkemästään. Tälläistä otosta kutsutaan stereokuvapariksi. Samalla periaatteella tehdään myös punavihreälaseilla katsottavat 3D-kuvat. Vihreä linssi näyttää kuvassa olevat punaiset piirteet, kuin taas punainen linssi näyttää vihreät piirteet ja hävittää kuvan punaiset piirteet häiritsemästä vaikutelmaa. 3D-elokuvat käyttivät aikaisemmin tätä menetelmää, mutta nykysin 3Dvaikutelma tehdään polarisaation avulla. [9]
15 11 3 Rungon mittaus HPF011-auton runko on suunniteltu syksyllä 2010 ja rakennettu keväällä Autolla ajettiin yksi Metropolia Motorsportin historian menestyksekkäimmistä kausista vuonna Talven ja kevään aikana 2012 auto purettiin täysin ja siihen tehtiin pieniä muutoksia tulevan alkukesän kisoja varten. Maaliskuun alussa ennen rungon uudelleen maalaamista runko digitoitiin ATOS -3D-skannerilla. Skannaus suoritettiin Helsingin Metropolia Ammattikorkeakoulun autosähkölaboratoriossa. Koska skannausprosessi vaatii tilaa skannattavan kohteen ympärillä liikkumiseen ja ulkona skannausta vaikeuttaa auringonvalo, autosähkölaboratoria osoittautui parhaimmaksi paikaksi mittausta ajatellen. Skannaamiinen onnistuu helpoiten hämärässä, koska skannerin oma valonlähde hoitaa kohteen valottamisen. Loisteputkivalaisimien tuottama valo sekä muut ihmissilmällä havaitsemattomat välkkyvät valot häiritsevät ja tuottavat hankaluuksia kuvausprosessiin. Autosähkölaboratorion pystyi hämärtämään sopivaksi, eikä siellä ollut suuria ikkunoita, joista auringonvalo olisi päässyt sisään. Mustaksi maalattu formulan runko oli myös haasteellinen pinta skannausta ajatellen. Musta väri absorboi valon itseensä, joten se tuo valotusasetuksiin haastetta kuten normaalissa valokuvauksessakin. Koska runko oli menossa hiontaan ja maalaukseen seuraavaksi, runkoputket voitiin värjätä valkoiseksi. Värjäämiseen käytettiin valoa läpäisemätöntä titaanioksidia, jota käytetään yleisesti valkoisena pigmenttinä muun muassa maaleissa, muoveissa ja meikeissä sekä makeisten väriaineena. Titaanioksidipöly sumutettiin spraypurkista, jossa on titaanioksidin lisäksi ponneaineena butaani-propaani sekä liuotinaineena isopropanoli-etanolia. Kun sumu tarttuu värjättävään pintaan, alkoholi haihtuu melko nopeasti pois ja pintaan jää pelkkä pöly ilman mitään sidosaineita. Pöly lähtee normaalisti pyyhkimällä pois tasaisilta pinnoilta, mutta huokosiin ja epätasaisiin pintoihin jää usein jäänteitä erittäin hienojakoisesta pölystä.


16 Digitointi Kuvaus aloitettiin Tritop-koordinaattimittausjärjestelmällä. Kun referenssipisteet oli kiinnitetty runkoon ja koodatut pisteet sekä mittasauvat oli asetettu paikoilleen, rungosta otettiin kuvia joka puolelta, niin että jokainen koodattu piste löytyi vähintään kahdesta otetusta kuvasta. Kuvassa 9 näkyy vihrellä pisteet, jotka on jo tunnistettu useammasta kuvasta, sekä keltaisella pisteet, jotka ovat uusia tunnistettuja pisteitä. Kuva 9. Tritopilla kuvatut pisteet. Kuvien ottamisen jälkeen ohjelmisto orientoi 2D-kuvat pisteiden avulla niin, että niistä saadaan luotua 3-ulotteinen kuva. Kun runkoon liimatut referenssipisteet ovat tietokoneella 3D-koordinaatistossa, voidaan pisteet tuoda skannerin ohjelmaan ja aloittaa skannaus. Kuvassa 10 Tritop-kameralla kuvatut referenssipisteet on tuotu ATOS-ohjemaan. Kuva 10. Runkoon kiinnitetyt referenssipisteet 3D-mallina.

17 13 Kun skanneri näkee vähintään kolme tuttua pistettä, jotka kuvattiin Tritopilla, se osaa laskea oman sijaintinsa avaruudessa kolmeen pisteeseen nähden. Kun skanneri tietää sijaintinsa koordinaatistossa referenssipisteisiin nähden, skannatut pinnat tallentuvat myös oikeille paikoilleen koordinaatistossa. Kuvassa 11 rungosta on skannattu kuudella otoksella keulaa sekä oikeaa takasivua. Kuva 11. Rungon pintojen muodostuminen. Skannerilla jatkettiin otosten ottamista ympäri runkoa niin pitkään, että kaikki halutut pinnat saatiin skannattua tietokoneelle. Koska referenssipisteet olivat kiinnitettyinä formulan runkoon, runkoa voitiin liikutella niin, että myös pohja saatiin kuvattua. Kuvassa 12 nähdään koko runko skannattuna yli 100 otoksen jälkeen. Kuva 12. Skannattu runko.

18 14 Kun koko runko oli skannattu, laitettiin tietokone suorittamaan laskenta eli skannauksen finalisointi, jossa kaikkien otosten skannatut pinnat yhdistetään samaksi yhtenäiseksi kolmiopinnaksi. Laskennan jälkeen käytettävissämme on mittatarkka 3Dmalli Formula Student -kilpa-auton rungosta. Samat proseduurit suoritettiin myös jousituksen keinuvivuille, mutta niiden mittaamisen apuna ei käytetty Tritop-järjestelmää. Linkkujen pienen koon vuoksi Tritopin käytöstä ei olisi ollut merkittävää hyötyä. Jokainen linkku skannattiin ensin päältä ja sitten alapuolelta. Kylkiin kiinnitettiin 3 4 pistettä, jotka kaikki näkyivät sekä ylä- että alapuolen skannauksissa. Skannauksen jälkeen ylä- sekä alapuoli yhdistettiin vähintään kolmen pisteen avulla toisiinsa, minkä jälkeen skannaus voitiin laittaa laskentaan. Skannauksien yhdistäminen onnistuu, kun kummassakin skannauksessa on vähintään 3 referenssipistettä, jotka näkyvät molemmissa skannauksissa. Referenssipisteitä on kuitenkin usein järkevä laittaa varmuuden vuoksi ainankin 4, koska tarralla kiinnittyvät pisteet saattavat siirtyä hieman, kun kappaletta liikutellaan ja näin ollen skannauksien yhdistäminen ei enää onnistu. Kuvassa 13 linkun ylä- sekä alapuoli on skannattu erikseen, minkä jälkeen skannaukset on yhdistetty käyttämällä kuvassa keltaisella näkyviä yhteisiä referenssipisteitä. Kuva 13. Kahden skannauksen yhdistäminen yhteisten referenssipisteiden avulla.

19 Skannauksen vertaaminen CAD-malliin Rungon digitoinnin jälkeen vuorossa oli skannatun rungon laittaminen Catialla suunnitellun 3D-mallin kanssa päällekkäin ja niiden vertaaminen toisiinsa. Rungon 3Dkokoonpanosta otettiin kaikki runkoon kuulumaton pois ja jätettiin pelkät rungossa olevat kiinnikkeet. Myös keulassa oleva törmäysvaimennin jätettiin pois, koska sen ei katsottu olevan kiinnostava osa mittauksen kannalta. Kun rungon mallissa oli kaikki tarpeellinen kiinni, eli kaikki ne kiinnikkeet, jotka olivat rungossa kiinni myös skannausvaiheessa, tallennettiin 3D-malli step-formaatissa, joka on yleinen tiedostomuoto siirrettäessä 3D-tiedostoja ohjelmasta toiseen. Tiedoston siirto Catiasta ATOS-ohjelmaan ei sujunut täysin ongelmitta. Muutamissa rungon putkissa pinnan normaalit olivat väärinpäin, eli ATOS ymmärsi putkien ulkopinnan olevan sisäpinta ja sisäpinnan ulkopinta. Kuvassa 14 kahden putken väri poikkeaa muiden putkien väristä. Vaaleanvihreissä putkissa pinnan normaali on putken sisäpintaa kohti. Kuva 14. Pinnan normaalit väärinpäin kahdessa putkessa. Pintojen normaalien on oltava samaan suuntaan, jotta pintojen vertaaminen toisiinsa onnistuisi. Kyseessä on melko harvinainen ongelma tuotaessa CAD-malleja skannerin ATOS-ohjelmaan. Emme keksineet, mistä tämä johtuu, koska kaikki runkoputket oli piirretty samalla tavalla Catiassa. Näitä ei voinut kuitenkaan Catiassa muuttaa, mutta ATOS-ohjelman valikosta löytyy käsky, jolla valittujen pintojen normaalit saa käännettyä päinvastoin (kuva 15).

20 16 Kuva 15. Pinnan normaalien muuttaminen ATOS-ohjelmalla Kun CAD-malli oli lopulta valmisteltu vertailua varten ja tuotu skannatun mallin kanssa samaa ATOS-projektiin, voitiin mallit asettaa toistensa päälle ja verrata toisiinsa. Pre Alignment -käskyllä tietokone etsii skannatusta mallista samoja muotoja ja piirteitä, joita on CAD-mallissa. Niiden perusteella ohjelma asettaa skannausdatan CAD-mallin päälle, niin että mallien pinnat ovat mahdollisimman paljon toistensa kanssa päällekkäin. Päällekkäin asettelun voi myös tehdä niin, että valitaan kummastakin mallista vähintään kolme pistettä, joiden halutaan olevan mahdollisimman tarkasti samassa kohdassa. Tätä menetelmää käytetään usein, jos kappaleessa on vaikkapa kiinnityspisteet, joiden tiedetään olevan melko suurella tarkkuudella kohdallaan. Kuvassa 16 harmaapintainen skannattu malli ja sininen CAD-malli asetettu pintojen mukaan päällekkäin.


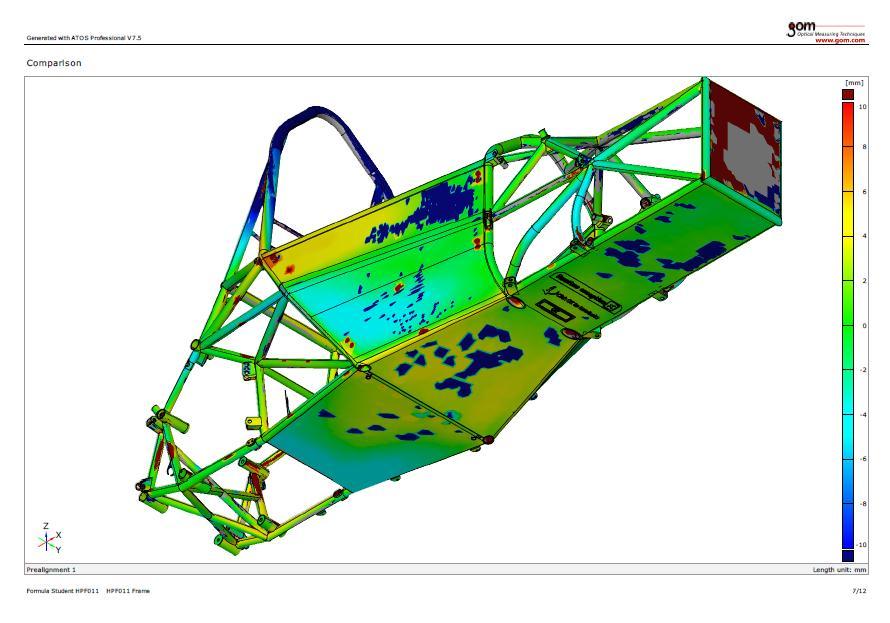
21 17 Kuva 16. Skannattu 3D-malli ja CAD-malli päällekkäin. Pintavertailulla tutkitaan, kuinka kaukana skannatun mallin pinnat ovat referenssinä olevista CAD-mallin pinnoista. Sen mukaan, kuinka paljon kauempana skannattu pinta on CAD-mallin pinnan yläpuolella, muuttuu pinnan väri keltaisesta punaiseksi. Sen mukaan, kuinka paljon kauempana skannattu pinta taas on CAD-mallin pinnan alapuolella, muuttuu pinnan väri vaaleansinisestä tummansiniseksi. Kun skannattu pinta kulkee CAD-mallin pinnan mukaisesti, vertailukuvassa pinta on vihreä. Kuvassa 17 päällekkäin laitetuille 3D-malleille on tehty pintavertailu. Kuva 17. Skannatun mallin vertaaminen CAD-malliin.
22 18 4 Tulokset 4.1 Runko Pintavertailusta havaitaan, että rungon valmistus on onnistunut varsin hyvin. Runkoputket menevät keskimäärin ±5 millimetrin tarkkuudella tarkkuudella CAD-mallin kanssa yhtenevästi. Tarkkuus on todella hyvä käsityönä tehdylle tämän kokoluokan putkirungolle. Tarkasteltuamme mittaraportissa ilmenneitä virheitä totesimme, että rungon valmistuksessa syntyneet alle 5 mm:n poikkeamat putkien kulkulinjoissa eivät vaikuta käytännössä rungon ominaisuuksiin. Rungon vääntöjäykkyys ja muut ominaisuudet eivät ole herkkiä suhteessa pieniin geometrisiin virheisiin. Niin kauan kun Formula Student -sääntöjen mukaiset sapluunat (kuvat 18 ja 19) mahtuvat auton ohjaamoon, pienet virheet runkoputkissa eivät vaikuta oleellisesti mihinkään. Lähes kaikki mittaraportissa ilmenneet muutamien millimetrien poikkeamat runkoputkissa johtuvat putkien kulmavirheistä. Esimerkiksi 250 mm pitkissä runkoputkissa, jotka ovat lyhimpiä putkia, 5 mm:n heitto tarkoittaa noin 1 asteen kulmavirhettä. [11] Kuva 18. Ohjaamoon ylhäältä tiputettava sapluuna [10, s. 67].
![19 Kuva 19. Ohjaamon jalkatilaan menevä sapluuna [10, s. 68]. Kuvassa 20 näkyy suurin rungossa oleva poikkeama, joka sijaitsee pääkaaren yläpäässä.](/docs-images/71/65676705/images/23-1.jpg "Harmaa todellinen malli on ylimmästä kohdastaan runkoputken paksuuden verran eli noin 30 mm kallistunut taaksepäin verrattuna suunniteltuun CAD-malliin.")
23 19 Kuva 19. Ohjaamon jalkatilaan menevä sapluuna [10, s. 68]. Kuvassa 20 näkyy suurin rungossa oleva poikkeama, joka sijaitsee pääkaaren yläpäässä. Harmaa todellinen malli on ylimmästä kohdastaan runkoputken paksuuden verran eli noin 30 mm kallistunut taaksepäin verrattuna suunniteltuun CAD-malliin. Pääkaaren poikkeama johtuu putkien taivutuksissa käytetyistä ilmeisen suurista toleransseista. Putki on voitu taivuttaa oikeaan kulmaan, mutta materiaalin joustosta johtuen kulma on jäänyt liian suureksi. Kyseisestä virheestä saattaisi koitua ongelmia Formula Student -säännön takia, jonka mukaan etukaaren ja pääkaaren väliin vedetyn viivan ja kuljettajan kypärän väliin on jäätävä vähintään 50 mm:n väli (kuva 21). [11] Kuva 20. Pääkaari
![20 Kuva 21. 50 mm:n sääntö [10, s. 63].](/docs-images/71/65676705/images/24-1.jpg "Pääkaaren liiallinen taaksepäin kallistuminen olisi voinut aiheuttaa isojakin ongelmia, mutta kuvassa 21 näkyvän 50 mm:n säännön täyttämiseksi oli kuitenkin toimittu varman päälle eikä pääkaaren")
24 20 Kuva mm:n sääntö [10, s. 63]. Pääkaaren liiallinen taaksepäin kallistuminen olisi voinut aiheuttaa isojakin ongelmia, mutta kuvassa 21 näkyvän 50 mm:n säännön täyttämiseksi oli kuitenkin toimittu varman päälle eikä pääkaaren taaksepäin kallistuma vaikuttanut testin läpäisemiseen katsastuksissa. Kuvassa 22 nähdään, kuinka myös etukaari on korkeimmasta kohdastaan hieman liian alhaalla johtuen todennäköisesti liian suuresta putken taivutussäteestä. Värivertailun vaalensinisen värin mukaan se on noin 5 mm liian alhaalla suunniteltuun CAD-malliin nähden. Valmistusvaiheessa huomattiin, että ratti joudutaan tekemään uusiksi, koska ratin yläosa ei ollut etukaaren alapuolella sääntöjen mukaisesti (kuva 23). Kuva 22. Etukaari
25 21 Kuva 23. Sääntö, jonka mukaan etukaari ei saa olla alempana kuin ratin yläosa millään ratin asennollaa [10, s. 65]. Kuvan 23 säännön ongelmat saattoivat johtua myös esimerkiksi rattiakselin väärästä kulmasta, koska 5 mm:n poikkeama pelkästään etukaaressa on vielä melko pieni. Ratti ja rattiakseli ei kuitenkaan ollut skannausvaiheessa rungossa kiinni, joten niiden oikein paikoittamista ei saatu selvitettyä. Vaikka vakavimmat virheet runkoputkissa johtuivat putkien taivutuksista, virheistä ei voida kuitenkaan syyttää vain putkien taivuttajaa. Suunnitteluvaiheessa olisi pitänyt ottaa paremmin huomioon putkien valmistettavuus ja toleranssikontrolli. Näistä etenkin toleranssikontrolliin olisi pitänyt valmistusvaiheessa panostaa huomattavasti enemmän. Pääkaaren ongelmakohtaan se ei olisi todennäköisesti auttanut, mutta etukaaren olisi mahdollisesti voinut korjata, jos putkentaivutusvirheen olisi huomannut ajoissa. [11] Runkoputket voitaisiin tulevaisuudessa mitata 3D-skannerilla ja verrata CAD-malleihin heti taivutuksen jälkeen, jolloin saataisiin varmuus, ovatko putket samallaiset kuin on suunniteltu. Näin virheet huomattaisiin välittömästi eikä ongelmia taivutusten suhteen pitäisi ilmetä valmistusvaiheessa. Myös runkoputkien taivuttajan kanssa tarkkojen toleranssien sopiminen tulee muistaa, jotta taivuttaja tietää kuinka suuret kulmavirheet ovat sallittuja putkien taivutuksissa.

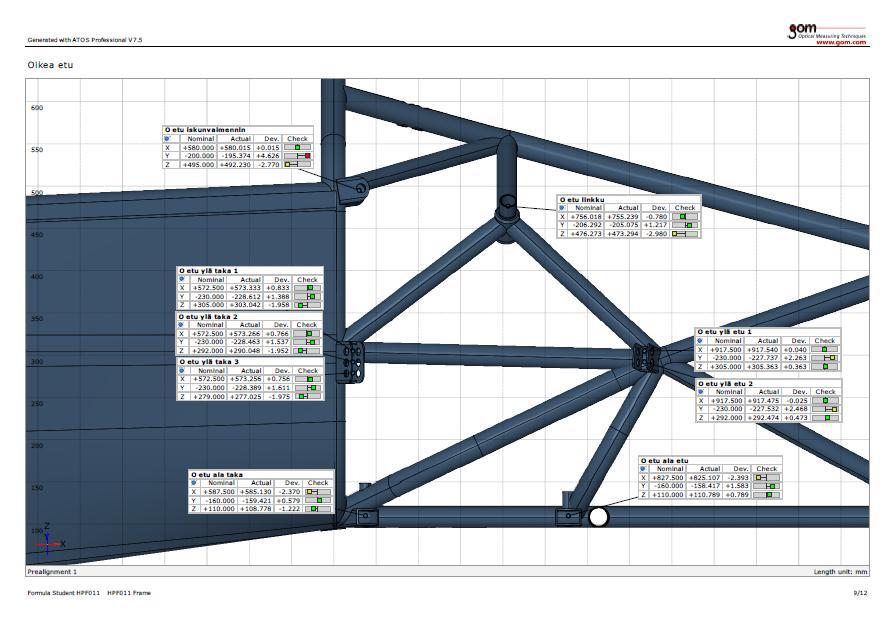
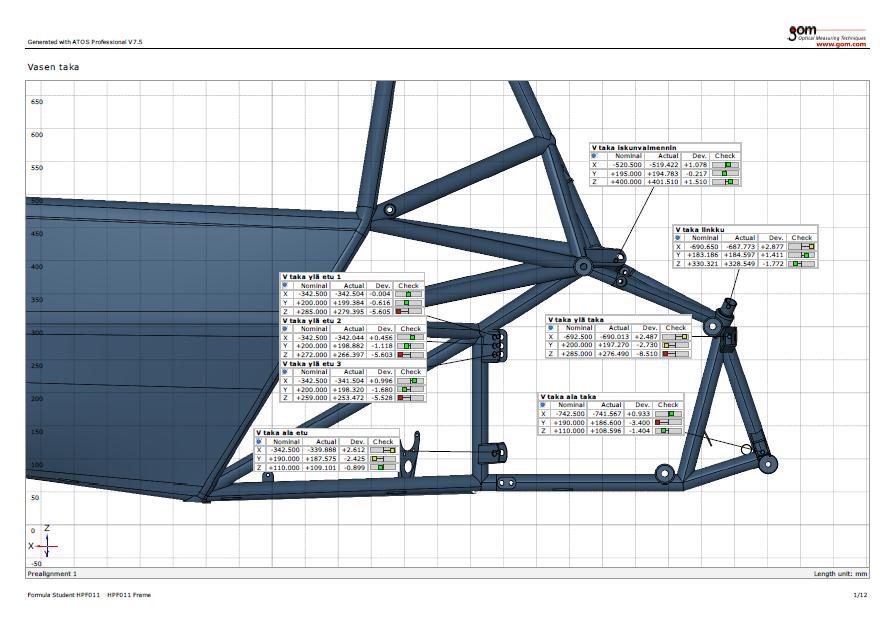
26 Alustapisteiden tarkastelu Rungon putkien lisäksi tarkemman tarkastelun kohteena olivat myös rungon alustapisteet eli kiinnikkeet, joihin tukivarret, iskunvaimentimet ja jousituksen keinuvivut kiinnitetään. Runkoputkissa muutamien millimetrien heitot eivät vaikuttaneet oleellisesti mihinkään niin kauan kuin auto on sääntöjen mukainen. Alustapisteiden osalta asia voi olla toinen. Jos alustan osien kiinnityspisteissä heittoa on usean millimetrin verran, voi sillä olla joissain tapauksissa vaikutusta alustan ominaisuuksin, ainakin teoriassa. Kiinnikkeiden keskipisteet etsittiin skannatusta rungosta ATOS-ohjelman avulla luomalla matemaattisia tasoja ja sylinterejä kiinnikkeisiin kuvan 24 mukaisesti. Sylinterin keskilinjalle ja kiinnikkeen sivupintojen puoleenväliin luotiin piste, joka vastaa suunniteltua alustapistettä. Tällä menetelmällä etsittiin jokainen alustan kiinnityspiste sekä sen koordinaatit. Kuva 24. Kiinnikkeiden keskipisteiden määrittäminen. Kun jokaisen alustapisteen koordinaatit olivat selvillä, voitiin niitä verrata CAD-mallin vastaavien pisteiden koordinaatteihin. Kuvassa 25 nähdään oikean etukulman tukivarsien takimmaisten kiinnityspisteiden koordinaatit ja niiden heitot x, y ja z- suunnassa. Nominal-koordinaatit merkitsee pisteen suunniteltua paikkaa CAD-mallissa, ja actual-koordinaatit ovat todellisten pisteiden tarkat koordinaatit. Näiden sarakkeiden oikealla puolella, sarakkeessa dev nähdään, kuinka paljon ja mihin suuntaan todelliset alustapisteiden koordinaatit poikkevat suunnitelluista alustapisteistä.
 lukuun ottamatta takimmaisten ylätukivarsien kiinnityspisteitä.")
27 23 Kuva 25. Oikean etukulman tukivarsien takimmaiset kiinnityspisteet. Kuvan 25 pisteissä suurimmat poikkemat ovat 2 mm luokkaa. Myös muissa alustapisteissä poikkeamat jäävät 2 3 mm:n tuntumaan (liite 1) lukuun ottamatta takimmaisten ylätukivarsien kiinnityspisteitä. Kyseiset kiinnikkeet olivat vertailussa käytetyssä CAD-mallissa 5 mm liian korkealla, joten poikkeamaan näiden pisteiden kohdalla täytyy lisätä 5 mm, jotta poikkeama on paikkansa pitävä. Virhe CAD-mallin kiinnityspisteissä huomattiin vasta, kun vertailu oli tehty, eikä uuden vertailun tekemistä nähty tarpeelliseksi. Kiinnikkeiden jigitys runkoon on onnistunut hyvin ja poikkeamat ovat sitä luokkaa kuin voitiin odottaakin. Kiinnikkeiden jigityksessä ei kiinnitetty huomiota niiden geometrisesti oikeaan sijaintiin rungossa, vaan siihen että kiinnikkeet on jigitetty saman origon mukaisesti suhteessa toisiinsa eli etäisyydet pisteiden välillä on pyritty saamaan oikein. [12] Tukivarsikiinnikkeet jigitettiin runkoon jigipöytää ja erilaisia apuvälineitä käyttäen. Jigityksen jälkeen kiinnikkeet hitsattiin yhdestä tai kahdesta pisteestä kiinni, minkä jälkeen jigit poistettiin kiinnikkeen ympäri hitsaamisen mahdollistamiseksi. Tässä vaiheessa kiinnikkeet ovat voineet hitsauksen lämpövaikutuksesta päästä vääntymään hieman, mikä osaltaan selittää poikkeamia suunniteltujen ja todellisten pisteiden
28 24 koordinaateissa. Hitsaksen lämpövaikutuksesta johtuneet kiinnikkeiden vääntymät ovatkin todennäköisesti suurin yksittäinen syy pisteiden poikkeamiin. [12] Teoreettisesti tarkasteltuna tukivarsipisteiden poikkeamat aiheuttavat alustageometrioiden epäsymmetrisyyttä. Tämän seurauksena kallistuskeskiö ei ole auton keskilinjalla tai suunnitellulla korkeudella, camber-muutokset voivat olla erilaisia auton eri kulmissa, pyöränkulmat eivät vastaa suunniteltua, joten renkaat kääntyvät eri verran. Tämä voi aiheuttaa sen, että auto käyttäytyy erilailla käännyttäessä vasemmalle tai oikealle. Vaihtoehtoisesti suorituskyky ei ole toivotunlainen missään ajotilanteessa. Käytännössä muutaman millimetrin poikkeamat ovat kuitenkin niin pieniä, että niillä ei ole huomattavaa vaikutusta auton suorituskykyyn. Samanlaisia muutoksia voi syntyä jo pelkästään alustan osien joustosta. Jos kiinnikkeet olisivat kuitenkin kymmeniä millimetrejä sivussa, tulisi varmasti ongelmia jo osien paikalleen istuvuuden kannalta. [12] Mikäli tarkkuutta halutaan parantaa kiinnikkeiden osalta, parempien jigitys menetelmien suunnitteleminen on tulevaisuudessa kannattavaa. 3D-mittakäden käyttäminen apuna kiinnikkeitä paikottaessa parantaa tarkkuutta merkittävästi. Lisäksi kiinnikkeiden parempi tukeminen hitsauksen aikana lämmöstä johtuvien vääntymien välttämiseksi parantaisi lopputulosta. Yksi vaihtoehto olisi myös kiinnikkeiden kiinnittäminen runkoon pulteilla hitsaamisen sijaan, jolloin runkoon porattaisiin vain reiät oikeille paikoilleen vaikkapa 3D-mittakättä apuna käyttäen. Pulteilla kiinnikkeiden runkoon kiinnittäminen eliminoisi hitsauksessa syntymät vääntymät täysin. [12] 4.3 Jousituksen keinuvivut Vaikka linkuissa ei odotettu olevan merkittäviä valmistusteknisiä virheitä, skannattiin ne rungon skannauksen yhteydessä. Kuvassa 26 nähdään poikkeamat etummaisen oikeanpuoleisen linkun reikien keskipisteissä. Poikkeamat tässä ovat suurimmillaan 0,025 millimetriä, kuten myös kolmessa muussa linkussa (liite 2). Kun poikkeamat ovat muutamia millimetrin sadasosia, voidaan koneistusta pitää onnistuneena. Otettakoon myös huomioon, että linkut on skannattu samalla mittavolyymilla kuin koko runko, jossa mittaepätarkkuus on 0,011 millimetriä [3, s. 4]. Jos reikien paikkojen täytyisi olla sadasosamillimetrin tarkkuudella oikeassa paikassa, mittaus olisi voitu suorittaa

29 25 käyttämällä pienempää mittavolyymia skannerissa, jolloin mittaepätarkkuus olisi huomattavasti pienempi. Kuva 26. Etummainen oikeanpuoleinen jousituksen keinuvipu. Muutaman sadasosamillimetrin poikkeamat keinuvipujen kiinnityspisteissä eivät vaikuta auton käyttäytymiseen radalla millään lailla. Kuten aikaisemminkin on tullut todettua, samansuuruisia poikkeamia syntyy jo alustan osissa tapahtuvassa joustossa ajon aikana. Reikien tarkastelun lisäksi keinuvivuille tehtiin myös pintavertailu. Pintavertailussa havaittiin yhdessä linkussa kaksi selvää koneistuksessa tullutta virhettä. Kuvan 27 etupään oikeanpuoleisen linkun pintavertailusta nähdään punainen alue, jossa kohtaa ainevahvuutta linkulla on 1 mm enemmän kuin on suunniteltu. Kyseinen virhe ei kuitenkaan vaikuta oleellisesti mihinkään. Paksumpi ainevahvuus tuo kuitenkin teoriassa hieman lisämassaa sekä jäykkyyttä keinuvivulle.


30 26 Kuva 27. Etupään oikeanpuoleisen keinuvivun koneistuksessa tullut virhe. Kuvassa 28 sinisessä kohdassa kappaleen pinta kulkee 2 millimetriä CAD-mallin pintaa alempana. Edellisestä virheestä johtunut massan lisäys kompensoituu hieman sekä korvakkeiden jäykkyys huonontuu hienoisesti. Tämänkin virheen vaikutukset käytännössä ovat häviävän pienet, koska iskunvaimentimen ja työntötangon kiinnittämiseen poikkeama ei vaikuta eikä massan muutosta käytännössä huomaa. Vastaavanlaisia virheitä, jotka eivät vaikuta osien istuvuuteen, on kuitenkin vaikea havaita ilman osien mittaamista. Kuva 28. Etupään oikeanpuoleisen keinuvivun koneistuksessa tullut toinen virhe.
31 27 5 Yhteenveto Tässä insinöörityössä digtoitiin Formula Student -kilpa-auton runko 3D-skannerilla. Digitoitua 3D-mallia vertaamalla CAD-malliin tutkittiin rungon valmistuksessa syntyneitä poikkeamia. Työssä on käyty läpi kaikki valmistuksen yhteydessä syntyneet merkittävät poikkeamat sekä pohdittu, mistä virheet ovat voineet johtua ja miten poikkeamat ovat voineet vaikuttaa auton ominaisuuksiin. Tässä insiöörityössä on myös esitelty ATOS 3D-skannerin toimintaperiaate pääpiirteittäin sekä perehdytty 3D-skannauksen ja optisen mittaamisen perusteisiin. Monimutkaisten osien ja laitteiden mittaaminen on vaikeaa tai jopa mahdotonta ilman optisia mittalaitteita. Optinen mittaustekniikka on usein nopein ja taloudellisin tapa saada halutut mitat vaikean muotoisesta kappaleesta. Formulan rungon mittaamiseen ei juuri muita mittalaitteita ole. 3D-mittakädellä mittaus olisi mahdollista tehdä, mutta yhtä tarkkaan mittaustulokseen pääseminen olisi vaikeaa tai lähes mahdotonta. Työssä ilmenneet poikkeamat runkoputkissa olivat valtaosin putkien taivutusvirheitä sekä kulmavirheitä putkien hitsausliitoksissa. Virheet olivat kuitenkin verrattain pieniä rungon kokoon nähden, joten niillä ei todettu olevan vaikutusta rungon ominaisuuksiin. Myös alustapisteiden poikkeamat olivat niin pienet, ettei niiden vaikutusta auton suorituskykyyn radalla voi huomata. Samansuuruisia muutoksia voi syntyä jo pelkästään alustan osien joustosta ajotilanteissa. Lähes kaikki mittauksen tuloksena selvinneet poikkemat suunniteltuun CAD-malliin nähden voitaisiin välttää uutta runkoa valmistettaessa. Runkoputkien tarkan valmistettavuuden varmistaminen putkien taivuttajalta, tarkkojen toleranssien sopiminen sekä heti taivutuksen jälkeen tehtävät putkien mittaukset vähentäisivät valmiiseen runkoon syntyvien poikkeamien määrää huomattavasti. Tukivarsikiinnikkeiden kiinnitykseen käytettäviä jigitys- ja kiinnitysmenetelmiä kehittämällä päästäisiin tarkempaan lopputulokseen. Suurin hyöty työstä on seuraavien runkojen suunnittelusta ja rakennuksesta vastaaville tiimin jäsenille. Kun tiedetään missä virheitä on aikaisemmin syntynyt, voidaan samojen virheiden tekemistä välttää tulevaisuudessa. Myös Formula Student -sarjan tuomarit arvostavat suuresti tämänkaltaisen laadunvarmistuksen tekemistä.
32 28 Skannaustyön mittatarkkuutta pystyttäisiin parantamaan mittaamalla tukivarsikiinnikkeiden ympäristö pienemmällä mittavolyymilla kiinnikkeiden pienestä koosta ja yksityiskohtaisuudesta johtuen. Tässä työssä menetelmää ei kuitenkaan käytetty, koska 0,011 mm:n mittaepätarkkuutta pidettiin riittävänä myös kiinnikkeiden osalta. 3D-skannauksen lisäksi myös dynaamisten muodonmuutosten mittaaminen optisilla mittalaitteilla olisi kannattavaa etenkin FEM-laskennan tulosten todentamiseksi. Rungon ja alustan osien käyttäytymistä vaikkapa jarrutustilanteessa pystyttäisiin tarkastelemaan optisilla mittalaitteilla. Myös hiilikuituvanteiden muodonmuutokset paikaltaa kiihdytykseen lähdettäessä voitaisiin helposti mitata ja verrata tuloksia FEMlaskuihin.
33 29 Lähteet 1 Principal of Optical 3D digitizing PDF-dokumentti. GOM. Luettu ATOS Triple Scan Revolutionary scanning technique Verkkodokumentti. GOM. < 3 Optical 3D measuring PDF-dokumentti. Institut für Produktionsmesstechnik, Werkstoffe und Optik (PWO). 4 GOM Acceptance Test. Certificate No _CP Acceptance/Reverification Base on VDI/VDE 2634, Part GOM. Luettu GOM Acceptance Test. Certificate No _CP Acceptance/Reverification Base on VDI/VDE 2634, Part GOM. Luettu Kolmiomittaus Verkkodokumentti. Geocaching. < Luettu Górski, F., Kuczko, W., Wichniarek, R. & Zawadzki, P APPLICATION OF CLOSE- RANGE PHOTOGRAMMETRY IN REVERSE ENGINEERING. Verkkodokumentti. Poznan University of Technology Division of Production Management. < Luettu The Basics of Photogrammetry Verkkodokumentti. Geodetic Systems. < Luettu Vinni, Päivi Kuva kertoo enemmän kuin tuhat sanaa Mitä on forogrammetria? Verkkodokumentti. Vinni Päivi. < Luettu Formula SAE rules Verkkodokumentti. SAE International. < Luettu
34 30 10 Ketonen, Markus HPF011-auton rungon suunnittelija, Metropolia Motorport, Helsinki. Keskustelu Ristolainen, Toni HPF011-auton alustan suunnittelija, Metropolia Motorsport, Helsinki. Keskustelu
35 Liite 1 1 (7) Rungon mittaraportti
36 Liite 1 2 (7)
")

37 Liite 1 3 (7)
")
38 Liite 1 4 (7)
")
39 Liite 1 5 (7)
")
40 Liite 1 6 (7)
")
41 Liite 1 7 (7)
42 Liite 2 1 (8) Linkkujen mittaraportit
43 Liite 2 2 (8)
44 Liite 2 3 (8)
45 Liite 2 4 (8)
46 Liite 2 5 (8)
47 Liite 2 6 (8)
48 Liite 2 7 (8)
49 Liite 2 8 (8)
3D-kuvauksen tekniikat ja sovelluskohteet. Mikael Hornborg
 3D-kuvauksen tekniikat ja sovelluskohteet Mikael Hornborg Luennon sisältö 1. Optiset koordinaattimittauskoneet 2. 3D skannerit 3. Sovelluskohteet Johdanto Optiset mittaustekniikat perustuvat valoon ja
3D-kuvauksen tekniikat ja sovelluskohteet Mikael Hornborg Luennon sisältö 1. Optiset koordinaattimittauskoneet 2. 3D skannerit 3. Sovelluskohteet Johdanto Optiset mittaustekniikat perustuvat valoon ja
Sustainable steel construction seminaari
 Sustainable steel construction seminaari 18.1.2017 Geometrian mittaaminen ja 3D skannaus Timo Kärppä 2017 2 SISÄLTÖ 1. Digitaalisuus mahdollistaa monia asioita 2. Mitä on 3D? 3. 3D skannaus, eri menetelmiä,
Sustainable steel construction seminaari 18.1.2017 Geometrian mittaaminen ja 3D skannaus Timo Kärppä 2017 2 SISÄLTÖ 1. Digitaalisuus mahdollistaa monia asioita 2. Mitä on 3D? 3. 3D skannaus, eri menetelmiä,
1) Maan muodon selvittäminen. 2) Leveys- ja pituuspiirit. 3) Mittaaminen
 Maan muodon selvittäminen. 2) Leveys- ja pituuspiirit. 3) Mittaaminen") 1) Maan muodon selvittäminen Nykyään on helppo sanoa, että maa on pallon muotoinen olet todennäköisesti itsekin nähnyt kuvia maasta avaruudesta kuvattuna. Mutta onko maapallomme täydellinen pallo? Tutki
1) Maan muodon selvittäminen Nykyään on helppo sanoa, että maa on pallon muotoinen olet todennäköisesti itsekin nähnyt kuvia maasta avaruudesta kuvattuna. Mutta onko maapallomme täydellinen pallo? Tutki
Artec TDSM 3D Skanneri 3D mallit ja animaatiot nopeasti, myös liikkuvasta kohteesta
 Artec TDSM 3D Skanneri 3D mallit ja animaatiot nopeasti, myös liikkuvasta kohteesta Miksi ostaa? 1. Aito on-line skannaus, jopa 15 kuva/s (frames/second) 2. Ei tarvetta referenssitarroille tai muille paikoitus
Artec TDSM 3D Skanneri 3D mallit ja animaatiot nopeasti, myös liikkuvasta kohteesta Miksi ostaa? 1. Aito on-line skannaus, jopa 15 kuva/s (frames/second) 2. Ei tarvetta referenssitarroille tai muille paikoitus
Laboratorioraportti 3
 KON-C3004 Kone-ja rakennustekniikan laboratoriotyöt Laboratorioraportti 3 Laboratorioharjoitus 1B: Ruuvijohde Ryhmä S: Pekka Vartiainen 427971 Jari Villanen 69830F Anssi Petäjä 433978 Mittaustilanne Harjoituksessa
KON-C3004 Kone-ja rakennustekniikan laboratoriotyöt Laboratorioraportti 3 Laboratorioharjoitus 1B: Ruuvijohde Ryhmä S: Pekka Vartiainen 427971 Jari Villanen 69830F Anssi Petäjä 433978 Mittaustilanne Harjoituksessa
Stereopaikannusjärjestelmän tarkkuus (3 op)
") Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Teknillinen korkeakoulu AS 0.3200 Automaatio ja systeemitekniikan projektityöt Stereopaikannusjärjestelmän tarkkuus (3 op) 19.9.2008 14.01.2009 Työn ohjaaja: DI Matti Öhman Mikko Seppälä 1 Työn esittely
Tulevaisuuden teräsrakenteet ja vaativa valmistus. 3D-skannaus ja käänteinen suunnittelu
 Tulevaisuuden teräsrakenteet ja vaativa valmistus Hämeenlinnassa 24. - 25.1.2018 3D-skannaus ja käänteinen suunnittelu Timo Kärppä, HAMK Ohutlevykeskus 2018 2 SISÄLTÖ 1. Digitaalisuus mahdollistaa monia
Tulevaisuuden teräsrakenteet ja vaativa valmistus Hämeenlinnassa 24. - 25.1.2018 3D-skannaus ja käänteinen suunnittelu Timo Kärppä, HAMK Ohutlevykeskus 2018 2 SISÄLTÖ 1. Digitaalisuus mahdollistaa monia
Luento 6: 3-D koordinaatit
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 6: 3-D koordinaatit AIHEITA (Alkuperäinen luento: Henrik Haggrén, 16.2.2003, Päivityksiä: Katri Koistinen 5.2.2004
Jussi Klemola 3D- KEITTIÖSUUNNITTELUOHJELMAN KÄYTTÖÖNOTTO
 Jussi Klemola 3D- KEITTIÖSUUNNITTELUOHJELMAN KÄYTTÖÖNOTTO Opinnäytetyö KESKI-POHJANMAAN AMMATTIKORKEAKOULU Puutekniikan koulutusohjelma Toukokuu 2009 TIIVISTELMÄ OPINNÄYTETYÖSTÄ Yksikkö Aika Ylivieska
Jussi Klemola 3D- KEITTIÖSUUNNITTELUOHJELMAN KÄYTTÖÖNOTTO Opinnäytetyö KESKI-POHJANMAAN AMMATTIKORKEAKOULU Puutekniikan koulutusohjelma Toukokuu 2009 TIIVISTELMÄ OPINNÄYTETYÖSTÄ Yksikkö Aika Ylivieska
MITTAUS JA DIGITOINTI. smartscan M I T T A A E T U S I. AICON 3D Systems yritys
 MITTAUS JA DIGITOINTI smartscan M I T T A A E T U S I AICON 3D Systems yritys smartscan Sarja joustavia järjestelmiä suuren tarkkuuden 3D mittaukseen smartscan järjestelmät kaappaavat mittauskohteittesi
MITTAUS JA DIGITOINTI smartscan M I T T A A E T U S I AICON 3D Systems yritys smartscan Sarja joustavia järjestelmiä suuren tarkkuuden 3D mittaukseen smartscan järjestelmät kaappaavat mittauskohteittesi
LIITE 1 VIRHEEN ARVIOINNISTA
 1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
1 LIITE 1 VIRHEEN ARVIOINNISTA Mihin tarvitset virheen arviointia? Mittaustulokset ovat aina todellisten luonnonvakioiden ja tutkimuskohdetta kuvaavien suureiden likiarvoja, vaikka mittauslaite olisi miten
Suorakulmainen kolmio
 Suorakulmainen kolmio 1. Määritä terävä kulma α, β ja γ, kun sinα = 0,5782, cos β = 0,745 ja tanγ = 1,222. π 2. Määritä trigonometristen funktioiden sini, kosini ja tangentti, kun kulma α = ja 3 β = 73,2
Suorakulmainen kolmio 1. Määritä terävä kulma α, β ja γ, kun sinα = 0,5782, cos β = 0,745 ja tanγ = 1,222. π 2. Määritä trigonometristen funktioiden sini, kosini ja tangentti, kun kulma α = ja 3 β = 73,2
Marika Johansson OPTISEN MITTALAITTEEN HYÖDYNTÄMINEN LAADUNVALVONNASSA
 Marika Johansson OPTISEN MITTALAITTEEN HYÖDYNTÄMINEN LAADUNVALVONNASSA Kone- ja tuotantotekniikan koulutusohjelma 2015 OPTISEN MITTALAITTEEN HYÖDYNTÄMINEN LAADUNVALVONNASSA Johansson, Marika Satakunnan
Marika Johansson OPTISEN MITTALAITTEEN HYÖDYNTÄMINEN LAADUNVALVONNASSA Kone- ja tuotantotekniikan koulutusohjelma 2015 OPTISEN MITTALAITTEEN HYÖDYNTÄMINEN LAADUNVALVONNASSA Johansson, Marika Satakunnan
Itsepalvelukopiokone
 Itsepalvelukopiokone Tarvitset kopiointiin joko Waltti-matkakortin tai tunnistetarran kirjastokorttiisi. Waltti-matkakortin voit hankkia Kansalaisinfosta ja tunnistetarran pääkirjaston Infosta. Näin aloitan
Itsepalvelukopiokone Tarvitset kopiointiin joko Waltti-matkakortin tai tunnistetarran kirjastokorttiisi. Waltti-matkakortin voit hankkia Kansalaisinfosta ja tunnistetarran pääkirjaston Infosta. Näin aloitan
LIITE 1 VIRHEEN ARVIOINNISTA
 1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
1 Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi miten uudenaikainen tai kallis tahansa ja mittaaja olisi alansa huippututkija Tästä johtuen mittaustuloksista
1. STEREOKUVAPARIN OTTAMINEN ANAGLYFIKUVIA VARTEN. Hyvien stereokuvien ottaminen edellyttää kahden perusasian ymmärtämistä.
 3-D ANAGLYFIKUVIEN TUOTTAMINEN Fotogrammetrian ja kaukokartoituksen laboratorio Teknillinen korkeakoulu Petri Rönnholm Perustyövaiheet: A. Ota stereokuvapari B. Poista vasemmasta kuvasta vihreä ja sininen
3-D ANAGLYFIKUVIEN TUOTTAMINEN Fotogrammetrian ja kaukokartoituksen laboratorio Teknillinen korkeakoulu Petri Rönnholm Perustyövaiheet: A. Ota stereokuvapari B. Poista vasemmasta kuvasta vihreä ja sininen
Pistepilvien hyödyntäminen rakennusvalvonnassa
 Pistepilvien hyödyntäminen rakennusvalvonnassa CubiCasa X Oulun Rakennusvalvonta Tiivistettynä: CubiCasan nopeassa kokeilussa kartoitettiin erilaisia rakennusten digitaalisia tallennustapoja, sekä kuinka
Pistepilvien hyödyntäminen rakennusvalvonnassa CubiCasa X Oulun Rakennusvalvonta Tiivistettynä: CubiCasan nopeassa kokeilussa kartoitettiin erilaisia rakennusten digitaalisia tallennustapoja, sekä kuinka
LIITE 1 VIRHEEN ARVIOINNISTA
 Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Oulun yliopisto Fysiikan opetuslaboratorio Fysiikan laboratoriotyöt 1 1 LIITE 1 VIRHEEN RVIOINNIST Mihin tarvitset virheen arviointia? Mittaustuloksiin sisältyy aina virhettä, vaikka mittauslaite olisi
Luento 5: Stereoskooppinen mittaaminen
 Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 Luento 5: Stereoskooppinen mittaaminen AIHEITA Etäisyysmittaus stereokuvaparilla Esimerkki: "TKK" Esimerkki: "Ritarihuone"
TTY Mittausten koekenttä. Käyttö. Sijainti
 TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
TTY Mittausten koekenttä Käyttö Tampereen teknillisen yliopiston mittausten koekenttä sijaitsee Tampereen teknillisen yliopiston välittömässä läheisyydessä. Koekenttä koostuu kuudesta pilaripisteestä (
Bluetooth-yksikkö BU-20 Tulostusopas. Sisällys Ennen käyttöä...2 Varotoimet...3 Tulostaminen...4
 Bluetooth-yksikkö BU-20 Tulostusopas Sisällys Ennen käyttöä......................................2 Varotoimet.........................................3 Tulostaminen.......................................4
Bluetooth-yksikkö BU-20 Tulostusopas Sisällys Ennen käyttöä......................................2 Varotoimet.........................................3 Tulostaminen.......................................4
TALVIOPINTOPÄIVÄT 2015 SVY. 3D-kuvaus ja reverse engineering käytännössä
 TALVIOPINTOPÄIVÄT 2015 SVY 3D-kuvaus ja reverse engineering Arttaporator Oy? Valunsuunnittelua, teräskomponenteille Valutekninen osaaminen Simulointiosaamista Malli- ja muottisuunnittelu Koneen-, proto-
TALVIOPINTOPÄIVÄT 2015 SVY 3D-kuvaus ja reverse engineering Arttaporator Oy? Valunsuunnittelua, teräskomponenteille Valutekninen osaaminen Simulointiosaamista Malli- ja muottisuunnittelu Koneen-, proto-
S-114.2720 Havaitseminen ja toiminta
 S-114.2720 Havaitseminen ja toiminta Heikki Hyyti 60451P Harjoitustyö 2 visuaalinen prosessointi Treismanin FIT Kuva 1. Kuvassa on Treismanin kokeen ensimmäinen osio, jossa piti etsiä vihreätä T kirjainta.
S-114.2720 Havaitseminen ja toiminta Heikki Hyyti 60451P Harjoitustyö 2 visuaalinen prosessointi Treismanin FIT Kuva 1. Kuvassa on Treismanin kokeen ensimmäinen osio, jossa piti etsiä vihreätä T kirjainta.
Teoreettisia perusteita II
 Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
Teoreettisia perusteita II Origon siirto projektiokeskukseen:? Origon siirto projektiokeskukseen: [ X X 0 Y Y 0 Z Z 0 ] [ Maa-57.260 Kiertyminen kameran koordinaatistoon:? X X 0 ] Y Y 0 Z Z 0 Kiertyminen
2/3D ELEKTRONINEN MITTAUS. Auton elektroninen. 2/3D-mittalaite. Technology from FINLAND MEASURING SYSTEMS
 2/3D ELEKTRONINEN MITTAUS Auton elektroninen 2/3D-mittalaite Technology from FINLAND MEASURING SYSTEMS 2/3D ELEKTRONINEN MITTAUS Auton elektroninen 2/3D-mittalaite Autorobot Finland Oy on kehittänyt auton
2/3D ELEKTRONINEN MITTAUS Auton elektroninen 2/3D-mittalaite Technology from FINLAND MEASURING SYSTEMS 2/3D ELEKTRONINEN MITTAUS Auton elektroninen 2/3D-mittalaite Autorobot Finland Oy on kehittänyt auton
RAPORTTI 04013522 12lUMVl2001. Urpo Vihreäpuu. Jakelu. OKMElOutokumpu 2 kpl PAMPALON RTK-KIINTOPISTEET. Sijainti 1:50 000. Avainsanat: RTK-mittaus
 RAPORTTI 04013522 12lUMVl2001 Urpo Vihreäpuu Jakelu OKMElOutokumpu 2 kpl PAMPALON RTK-KIINTOPISTEET - 4333 07 Sijainti 1:50 000 Avainsanat: RTK-mittaus OUTOKUMPU MINING OY Mairninetsnnta RAPORTTI 04013522
RAPORTTI 04013522 12lUMVl2001 Urpo Vihreäpuu Jakelu OKMElOutokumpu 2 kpl PAMPALON RTK-KIINTOPISTEET - 4333 07 Sijainti 1:50 000 Avainsanat: RTK-mittaus OUTOKUMPU MINING OY Mairninetsnnta RAPORTTI 04013522
1/6 TEKNIIKKA JA LIIKENNE FYSIIKAN LABORATORIO V1.31 9.2011
 1/6 333. SÄDEOPTIIKKA JA FOTOMETRIA A. INSSIN POTTOVÄIN JA TAITTOKYVYN MÄÄRITTÄMINEN 1. Työn tavoite. Teoriaa 3. Työn suoritus Työssä perehdytään valon kulkuun väliaineissa ja niiden rajapinnoissa sädeoptiikan
1/6 333. SÄDEOPTIIKKA JA FOTOMETRIA A. INSSIN POTTOVÄIN JA TAITTOKYVYN MÄÄRITTÄMINEN 1. Työn tavoite. Teoriaa 3. Työn suoritus Työssä perehdytään valon kulkuun väliaineissa ja niiden rajapinnoissa sädeoptiikan
Koneistusyritysten kehittäminen. Mittaustekniikka. Mittaaminen ja mittavälineet. Rahoittajaviranomainen: Satakunnan ELY-keskus
 Koneistusyritysten kehittäminen Mittaustekniikka Mittaaminen ja mittavälineet Rahoittajaviranomainen: Satakunnan ELY-keskus Yleistä Pidä työkalut erillään mittavälineistä Ilmoita rikkoutuneesta mittavälineestä
Koneistusyritysten kehittäminen Mittaustekniikka Mittaaminen ja mittavälineet Rahoittajaviranomainen: Satakunnan ELY-keskus Yleistä Pidä työkalut erillään mittavälineistä Ilmoita rikkoutuneesta mittavälineestä
ASPIRIININ MÄÄRÄN MITTAUS VALOKUVAAMALLA
 ASPIRIININ MÄÄRÄN MITTAUS VALOKUVAAMALLA Jaakko Lohenoja 2009 Johdanto Asetyylisalisyylihapon määrä voidaan mitata spektrofotometrisesti hydrolysoimalla asetyylisalisyylihappo salisyylihapoksi ja muodostamalla
ASPIRIININ MÄÄRÄN MITTAUS VALOKUVAAMALLA Jaakko Lohenoja 2009 Johdanto Asetyylisalisyylihapon määrä voidaan mitata spektrofotometrisesti hydrolysoimalla asetyylisalisyylihappo salisyylihapoksi ja muodostamalla
LASERKEILAUKSEEN PERUSTUVA 3D-TIEDONKERUU MONIPUOLISIA RATKAISUJA KÄYTÄNNÖN TARPEISIIN
 LASERKEILAUKSEEN PERUSTUVA 3D-TIEDONKERUU MONIPUOLISIA RATKAISUJA KÄYTÄNNÖN TARPEISIIN PSK-BIM seminaari 9.5.2014 Jukka Mäkelä, Oy 1 SMARTGEO OY Palvelujen johtoajatuksena on tarkkojen, kattavien ja luotettavien
LASERKEILAUKSEEN PERUSTUVA 3D-TIEDONKERUU MONIPUOLISIA RATKAISUJA KÄYTÄNNÖN TARPEISIIN PSK-BIM seminaari 9.5.2014 Jukka Mäkelä, Oy 1 SMARTGEO OY Palvelujen johtoajatuksena on tarkkojen, kattavien ja luotettavien
d sinα Fysiikan laboratoriotyöohje Tietotekniikan koulutusohjelma OAMK Tekniikan yksikkö TYÖ 8: SPEKTROMETRITYÖ I Optinen hila
 Fysiikan laboratoriotyöohje Tietotekniikan koulutusohjelma OAMK Tekniikan yksikkö TYÖ 8: SPEKTROMETRITYÖ I Optinen hila Optisessa hilassa on hyvin suuri määrä yhdensuuntaisia, toisistaan yhtä kaukana olevia
Fysiikan laboratoriotyöohje Tietotekniikan koulutusohjelma OAMK Tekniikan yksikkö TYÖ 8: SPEKTROMETRITYÖ I Optinen hila Optisessa hilassa on hyvin suuri määrä yhdensuuntaisia, toisistaan yhtä kaukana olevia
SKANNAUSVINKKEJÄ. Skannausasetukset:
 SKANNAUSVINKKEJÄ Tämä skannausohje on tarkoitettu täydentämään Yliopistopainon Xerox-käyttöohjetta (https://www.jyu.fi/palvelut/yopaino/opiskelija/print-it/xerox%20kayttoohje), ei korvaamaan sitä. Yliopistopainon
SKANNAUSVINKKEJÄ Tämä skannausohje on tarkoitettu täydentämään Yliopistopainon Xerox-käyttöohjetta (https://www.jyu.fi/palvelut/yopaino/opiskelija/print-it/xerox%20kayttoohje), ei korvaamaan sitä. Yliopistopainon
Maanmittauspäivät 2014 Seinäjoki
 Maanmittauspäivät 2014 Seinäjoki Parempaa tarkkuutta satelliittimittauksille EUREF/N2000 - järjestelmissä Ympäristösi parhaat tekijät 2 EUREF koordinaattijärjestelmän käyttöön otto on Suomessa sujunut
Maanmittauspäivät 2014 Seinäjoki Parempaa tarkkuutta satelliittimittauksille EUREF/N2000 - järjestelmissä Ympäristösi parhaat tekijät 2 EUREF koordinaattijärjestelmän käyttöön otto on Suomessa sujunut
Kenguru 2019 Cadet (8. ja 9. luokka)
") Sivu 0 / 8 NIMI LUOKKA Pisteet: Kenguruloikan pituus: Tunnistekoodi (ope täyttää): Irrota tämä vastauslomake tehtävämonisteesta. Merkitse vastaus tehtävän numeron alle. Oikeasta vastauksesta saa 3, 4 tai
Sivu 0 / 8 NIMI LUOKKA Pisteet: Kenguruloikan pituus: Tunnistekoodi (ope täyttää): Irrota tämä vastauslomake tehtävämonisteesta. Merkitse vastaus tehtävän numeron alle. Oikeasta vastauksesta saa 3, 4 tai
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Todellinen 3D-ohjauksensuuntauslaite
 geoliner 680 ja geoliner 780 Huipputarkka Kaikki ajoneuvojen säätöarvot tulevat suoraan autovalmistajilta ja ovat tarkkoja ja luotettavia. Kehittynyt kamerajärjestelmä on erittäin tarkka ja takaa luotettavan
geoliner 680 ja geoliner 780 Huipputarkka Kaikki ajoneuvojen säätöarvot tulevat suoraan autovalmistajilta ja ovat tarkkoja ja luotettavia. Kehittynyt kamerajärjestelmä on erittäin tarkka ja takaa luotettavan
Kuten aaltoliikkeen heijastuminen, niin myös taittuminen voidaan selittää Huygensin periaatteen avulla.
 FYS 103 / K3 SNELLIN LAKI Työssä tutkitaan monokromaattisen valon taittumista ja todennetaan Snellin laki. Lisäksi määritetään kokonaisheijastuksen rajakulmia ja aineiden taitekertoimia. 1. Teoriaa Huygensin
FYS 103 / K3 SNELLIN LAKI Työssä tutkitaan monokromaattisen valon taittumista ja todennetaan Snellin laki. Lisäksi määritetään kokonaisheijastuksen rajakulmia ja aineiden taitekertoimia. 1. Teoriaa Huygensin
Ajotaitomerkkisäännöt matkailuautolle voimaan 1.1.2012
 Ajotaitomerkkisäännöt matkailuautolle voimaan..202 Tarkoitus on saada jokainen karavaanari kiinnostumaan ajotaitonsa kehittämisestä oman ajoneuvonsa käsittelyssä. On tärkeää, että mahdollisimman moni kokee
Ajotaitomerkkisäännöt matkailuautolle voimaan..202 Tarkoitus on saada jokainen karavaanari kiinnostumaan ajotaitonsa kehittämisestä oman ajoneuvonsa käsittelyssä. On tärkeää, että mahdollisimman moni kokee
Passihakemukseen liitettävän valokuvan on täytettävä tässä ohjeessa annetut vaatimukset.
 Valokuvaohje Suomessa on siirrytty 21.8.2006 uusiin passikuvavaatimuksiin, jotka perustuvat YK:n alaisen kansainvälisen siviili-ilmailujärjestön määritelmiin. Niiden tehtävänä on yhdenmukaistaa passikuvia
Valokuvaohje Suomessa on siirrytty 21.8.2006 uusiin passikuvavaatimuksiin, jotka perustuvat YK:n alaisen kansainvälisen siviili-ilmailujärjestön määritelmiin. Niiden tehtävänä on yhdenmukaistaa passikuvia
Luento 6 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 6 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Malleja ja menetelmiä geometriseen tietokonenäköön
 Malleja ja menetelmiä geometriseen tietokonenäköön Juho Kannala 7.5.2010 Johdanto Tietokonenäkö on ala, joka kehittää menetelmiä automaattiseen kuvien sisällön tulkintaan Tietokonenäkö on ajankohtainen
Malleja ja menetelmiä geometriseen tietokonenäköön Juho Kannala 7.5.2010 Johdanto Tietokonenäkö on ala, joka kehittää menetelmiä automaattiseen kuvien sisällön tulkintaan Tietokonenäkö on ajankohtainen
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry)
") Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
Maa-57.260 Fotogrammetrian erikoissovellutukset (Close-Range Photogrammetry) -luennot: --ti 12-14 M5, to 12-14 M5 --Henrik Haggrén (HH), Petteri Pöntinen (PP) 1. Johdanto ja teoreettisia perusteita I,
Trimble S7: SureScan, pistepilvet ja VISION-kuvantaminen tee näin Kari Tenhunen Geotrim Kä K y ä tt t äj t äpäivä v t ä
 Trimble S7: SureScan, pistepilvet ja VISION-kuvantaminen tee näin Kari Tenhunen Sisältö Työn perustaminen ja siihen liittyvät asetukset VISION-teknologian hyödyntämien Prismanhaku Kuvien ottaminen lisätietona
Trimble S7: SureScan, pistepilvet ja VISION-kuvantaminen tee näin Kari Tenhunen Sisältö Työn perustaminen ja siihen liittyvät asetukset VISION-teknologian hyödyntämien Prismanhaku Kuvien ottaminen lisätietona
Sami Hirvonen. Ulkoasut Media Works sivustolle
 Metropolia ammattikorkeakoulu Mediatekniikan koulutusohjelma VBP07S Sami Hirvonen Ulkoasut Media Works sivustolle Loppuraportti 14.10.2010 Visuaalinen suunnittelu 2 Sisällys 1 Johdanto 3 2 Oppimisteknologiat
Metropolia ammattikorkeakoulu Mediatekniikan koulutusohjelma VBP07S Sami Hirvonen Ulkoasut Media Works sivustolle Loppuraportti 14.10.2010 Visuaalinen suunnittelu 2 Sisällys 1 Johdanto 3 2 Oppimisteknologiat
Luento 3: 3D katselu. Sisältö
 Tietokonegrafiikan perusteet T-.43 3 op Luento 3: 3D katselu Lauri Savioja Janne Kontkanen /27 3D katselu / Sisältö Kertaus: koordinaattimuunnokset ja homogeeniset koordinaatit Näkymänmuodostus Kameran
Tietokonegrafiikan perusteet T-.43 3 op Luento 3: 3D katselu Lauri Savioja Janne Kontkanen /27 3D katselu / Sisältö Kertaus: koordinaattimuunnokset ja homogeeniset koordinaatit Näkymänmuodostus Kameran
Vanhankaupunginkosken ultraäänikuvaukset Simsonar Oy Pertti Paakkolanvaara
 Vanhankaupunginkosken ultraäänikuvaukset 15.7. 14.11.2014 Simsonar Oy Pertti Paakkolanvaara Avaintulokset 2500 2000 Ylös vaellus pituusluokittain: 1500 1000 500 0 35-45 cm 45-60 cm 60-70 cm >70 cm 120
Vanhankaupunginkosken ultraäänikuvaukset 15.7. 14.11.2014 Simsonar Oy Pertti Paakkolanvaara Avaintulokset 2500 2000 Ylös vaellus pituusluokittain: 1500 1000 500 0 35-45 cm 45-60 cm 60-70 cm >70 cm 120
Luento 5 Mittakuva. fotogrammetriaan ja kaukokartoitukseen
 Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
Luento 5 Mittakuva 1 Aiheita Mittakuva Muunnokset informaatiokanavassa. Geometrisen tulkinnan vaihtoehdot. Stereokuva, konvergentti kuva. Koordinaatistot. Kuvien orientoinnit. Sisäinen orientointi. Ulkoinen
1 JOHDANTO 3 2 LÄHTÖTIEDOT JA MENETELMÄT 4
 Karri Kauppila KOTKAN JA HAMINAN TUULIVOIMALOIDEN MELUMITTAUKSET 21.08.2013 Melumittausraportti 2013 SISÄLLYS 1 JOHDANTO 3 2 LÄHTÖTIEDOT JA MENETELMÄT 4 2.1 Summan mittauspisteet 4 2.2 Mäkelänkankaan mittauspisteet
Karri Kauppila KOTKAN JA HAMINAN TUULIVOIMALOIDEN MELUMITTAUKSET 21.08.2013 Melumittausraportti 2013 SISÄLLYS 1 JOHDANTO 3 2 LÄHTÖTIEDOT JA MENETELMÄT 4 2.1 Summan mittauspisteet 4 2.2 Mäkelänkankaan mittauspisteet
Laskennallinen menetelmä puun biomassan ja oksien kokojakauman määrittämiseen laserkeilausdatasta
 Laskennallinen menetelmä puun biomassan ja oksien kokojakauman määrittämiseen laserkeilausdatasta Pasi Raumonen, Mikko Kaasalainen ja Markku Åkerblom Tampereen teknillinen ylipisto, Matematiikan laitos
Laskennallinen menetelmä puun biomassan ja oksien kokojakauman määrittämiseen laserkeilausdatasta Pasi Raumonen, Mikko Kaasalainen ja Markku Åkerblom Tampereen teknillinen ylipisto, Matematiikan laitos
S-108.3020 Elektroniikan häiriökysymykset. Laboratoriotyö, kevät 2010
 1/7 S-108.3020 Elektroniikan häiriökysymykset Laboratoriotyö, kevät 2010 Häiriöiden kytkeytyminen yhteisen impedanssin kautta lämpötilasäätimessä Viimeksi päivitetty 25.2.2010 / MO 2/7 Johdanto Sähköisiä
1/7 S-108.3020 Elektroniikan häiriökysymykset Laboratoriotyö, kevät 2010 Häiriöiden kytkeytyminen yhteisen impedanssin kautta lämpötilasäätimessä Viimeksi päivitetty 25.2.2010 / MO 2/7 Johdanto Sähköisiä
Rihtausohje. J.Puhakka
 Rihtausohje Pyörän vanteen pinnoitus (rihtaus) on aikaa vievä toimenpide, joka vaatii kärsivällisyyttä tekijältään. Tässä on ohje, joka toivottavasti helpottaa osaltaan työn onnistumista. J.Puhakka 1 Pinnat
Rihtausohje Pyörän vanteen pinnoitus (rihtaus) on aikaa vievä toimenpide, joka vaatii kärsivällisyyttä tekijältään. Tässä on ohje, joka toivottavasti helpottaa osaltaan työn onnistumista. J.Puhakka 1 Pinnat
Luento 7: Fotogrammetrinen mittausprosessi
 7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
7Maa-57.300 Fotogrammetrian perusteet Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 11 12 13 (Alkuperäinen luento: Henrik Haggrén, 7.2.2003, Päivityksiä: Katri Koistinen, 5.2.2004 ) Luento 7: Fotogrammetrinen mittausprosessi
Jatkuvat satunnaismuuttujat
 Jatkuvat satunnaismuuttujat Satunnaismuuttuja on jatkuva jos se voi ainakin periaatteessa saada kaikkia mahdollisia reaalilukuarvoja ainakin tietyltä väliltä. Täytyy ymmärtää, että tällä ei ole mitään
Jatkuvat satunnaismuuttujat Satunnaismuuttuja on jatkuva jos se voi ainakin periaatteessa saada kaikkia mahdollisia reaalilukuarvoja ainakin tietyltä väliltä. Täytyy ymmärtää, että tällä ei ole mitään
Hans Pihlajamäki Fysiikan kotitutkimus
 Fysiikan kotitutkimus Fysiikan 1. kurssi, Rauman Lyseon lukio Johdanto 1. Saaristo- ja rannikkonavigoinnissa on tärkeää kyetä havainnoimaan väyliä osoittavia väylämerkkejä. Pimeän aikaan liikuttaessa tehokkaalla
Fysiikan kotitutkimus Fysiikan 1. kurssi, Rauman Lyseon lukio Johdanto 1. Saaristo- ja rannikkonavigoinnissa on tärkeää kyetä havainnoimaan väyliä osoittavia väylämerkkejä. Pimeän aikaan liikuttaessa tehokkaalla
Kahden laboratorion mittaustulosten vertailu
 TUTKIMUSSELOSTUS NRO RTE9 (8) LIITE Kahden laboratorion mittaustulosten vertailu Sisältö Sisältö... Johdanto... Tulokset.... Lämpökynttilät..... Tuote A..... Tuote B..... Päätelmiä.... Ulkotulet.... Hautalyhdyt,
TUTKIMUSSELOSTUS NRO RTE9 (8) LIITE Kahden laboratorion mittaustulosten vertailu Sisältö Sisältö... Johdanto... Tulokset.... Lämpökynttilät..... Tuote A..... Tuote B..... Päätelmiä.... Ulkotulet.... Hautalyhdyt,
OUTOKUMPU OY 0 K MALMINETSINTA
 Q OUTOKUMPU OY 0 K MALMINETSINTA TUTKIMUSRUNGON MITTAUS SUOMUSSALMEN AITTOJARVELLA Vanha lin joitus Alueella oli tavanomainen geofysikaalisia mittauksia varten tehty linjoitus, johon myös kairaus on sidottu.
Q OUTOKUMPU OY 0 K MALMINETSINTA TUTKIMUSRUNGON MITTAUS SUOMUSSALMEN AITTOJARVELLA Vanha lin joitus Alueella oli tavanomainen geofysikaalisia mittauksia varten tehty linjoitus, johon myös kairaus on sidottu.
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää
 Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
Matterport vai GeoSLAM? Juliane Jokinen ja Sakari Mäenpää Esittely Tutkimusaineiston laatija DI Aino Keitaanniemi Aino Keitaanniemi työskentelee Aalto yliopiston Rakennetun ympäristön mittauksen ja mallinnuksen
1 Laske ympyrän kehän pituus, kun
 Ympyrään liittyviä harjoituksia 1 Laske ympyrän kehän pituus, kun a) ympyrän halkaisijan pituus on 17 cm b) ympyrän säteen pituus on 1 33 cm 3 2 Kuinka pitkä on ympyrän säde, jos sen kehä on yhden metrin
Ympyrään liittyviä harjoituksia 1 Laske ympyrän kehän pituus, kun a) ympyrän halkaisijan pituus on 17 cm b) ympyrän säteen pituus on 1 33 cm 3 2 Kuinka pitkä on ympyrän säde, jos sen kehä on yhden metrin
Työ 2324B 4h. VALON KULKU AINEESSA
 TURUN AMMATTIKORKEAKOULU TYÖOHJE 1/5 Työ 2324B 4h. VALON KULKU AINEESSA TYÖN TAVOITE Työssä perehdytään optisiin ilmiöihin tutkimalla valon kulkua linssisysteemeissä ja prismassa. Tavoitteena on saada
TURUN AMMATTIKORKEAKOULU TYÖOHJE 1/5 Työ 2324B 4h. VALON KULKU AINEESSA TYÖN TAVOITE Työssä perehdytään optisiin ilmiöihin tutkimalla valon kulkua linssisysteemeissä ja prismassa. Tavoitteena on saada
1 PÖYDÄT JA PALLOT 1. Kilpailuissa tulee käyttää Suomen Biljardiliiton hyväksymiä pöytiä ja palloja.
 KARAMBOLEN SÄÄNNÖT Kolmen vallin kara Yhden vallin kara Suora kara - Cadre YHTEISET SÄÄNNÖT KAIKILLE PELIMUODOILLE 1 PÖYDÄT JA PALLOT 1. Kilpailuissa tulee käyttää Suomen Biljardiliiton hyväksymiä pöytiä
KARAMBOLEN SÄÄNNÖT Kolmen vallin kara Yhden vallin kara Suora kara - Cadre YHTEISET SÄÄNNÖT KAIKILLE PELIMUODOILLE 1 PÖYDÄT JA PALLOT 1. Kilpailuissa tulee käyttää Suomen Biljardiliiton hyväksymiä pöytiä
RAKENNUSTEN TIIVIYSMITTAUS MITTALAITTEET
 Rakennusten tiiviysmittaus MITTALAITTTEET 1/6 RAKENNUSTEN TIIVIYSMITTAUS MITTALAITTEET Kuva 1. Retrotec tiiviysmittauslaitteisto. Kuva 2. Minneapolis tiiviysmittauslaitteisto. Kuva 3. Wöhler tiiviysmittauslaitteisto.
Rakennusten tiiviysmittaus MITTALAITTTEET 1/6 RAKENNUSTEN TIIVIYSMITTAUS MITTALAITTEET Kuva 1. Retrotec tiiviysmittauslaitteisto. Kuva 2. Minneapolis tiiviysmittauslaitteisto. Kuva 3. Wöhler tiiviysmittauslaitteisto.
Moottorin kierrosnopeus Tämän harjoituksen jälkeen:
 Moottorin kierrosnopeus Tämän harjoituksen jälkeen: osaat määrittää moottorin kierrosnopeuden pulssianturin ja Counter-sisääntulon avulla, osaat siirtää manuaalisesti mittaustiedoston LabVIEW:sta MATLABiin,
Moottorin kierrosnopeus Tämän harjoituksen jälkeen: osaat määrittää moottorin kierrosnopeuden pulssianturin ja Counter-sisääntulon avulla, osaat siirtää manuaalisesti mittaustiedoston LabVIEW:sta MATLABiin,
Puhelintukiasema-antennin säteilykuvion mittaus multikopterilla (Valmiin työn esittely)
") Puhelintukiasema-antennin säteilykuvion mittaus multikopterilla (Valmiin työn esittely) Nina Gunell 24.03.2016 Ohjaaja: Yliopistonlehtori Jari Holopainen Valvoja: Professori Harri Ehtamo Työn saa tallentaa
Puhelintukiasema-antennin säteilykuvion mittaus multikopterilla (Valmiin työn esittely) Nina Gunell 24.03.2016 Ohjaaja: Yliopistonlehtori Jari Holopainen Valvoja: Professori Harri Ehtamo Työn saa tallentaa
Aito on-line 3D Skanneri 3D mallit ja animaatiot nopeasti, myös liikkuvasta kohteesta
 Aito on-line 3D Skanneri 3D mallit ja animaatiot nopeasti, myös liikkuvasta kohteesta Miksi ostaa? 1. On-line skannaus, jopa 15 kuva/s (frames/second) 2. Ei tarvetta referenssitarroille tai muille paikoitus
Aito on-line 3D Skanneri 3D mallit ja animaatiot nopeasti, myös liikkuvasta kohteesta Miksi ostaa? 1. On-line skannaus, jopa 15 kuva/s (frames/second) 2. Ei tarvetta referenssitarroille tai muille paikoitus
LIITE 11. Leipiön tuulivoimapuiston osayleiskaava Halmekankaan tuulivoimapuiston osayleiskaava Onkalon tuulivoimapuiston osayleiskaava.
 S U U N N IT T EL U JA T EK N IIK K A LIITE 11 SIMON KUNTA Havainnekuvat FCG SUUNNITTELU JA TEKNIIKKA OY 14.5.2014 P19456 1 (17) 1 Johdanto Havainnekuvat on laadittu WindPRO-ohjelmiston PHOTOMONTAGE modulilla.
S U U N N IT T EL U JA T EK N IIK K A LIITE 11 SIMON KUNTA Havainnekuvat FCG SUUNNITTELU JA TEKNIIKKA OY 14.5.2014 P19456 1 (17) 1 Johdanto Havainnekuvat on laadittu WindPRO-ohjelmiston PHOTOMONTAGE modulilla.
Tekijä Pitkä matematiikka Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4).
, ( 2,1), (1, 0), (4, 1) ja ( 11, 4).") Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
SÄÄNNÖT. Language: English / Suomi
 Rules of Coerceo by Coerceo Company Finnish translation by Janne Henriksson SÄÄNNÖT Language: English / Suomi Tekijänoikeus Mitään tämän dokumentin osaa ei saa jäljentää, kopioida tai välittää missään
Rules of Coerceo by Coerceo Company Finnish translation by Janne Henriksson SÄÄNNÖT Language: English / Suomi Tekijänoikeus Mitään tämän dokumentin osaa ei saa jäljentää, kopioida tai välittää missään
Kenguru 2015 Mini-Ecolier (2. ja 3. luokka) RATKAISUT
 RATKAISUT") sivu 1 / 10 3 pistettä 1. Kuinka monta pilkkua kuvan leppäkertuilla on yhteensä? (A) 17 (B) 18 (C) 19 (D) 20 (E) 21 Ratkaisu: Pilkkuja on 1 + 1 + 1 + 2 + 2 + 1 + 3 + 2 + 3 + 3 = 19. 2. Miltä kuvan pyöreä
sivu 1 / 10 3 pistettä 1. Kuinka monta pilkkua kuvan leppäkertuilla on yhteensä? (A) 17 (B) 18 (C) 19 (D) 20 (E) 21 Ratkaisu: Pilkkuja on 1 + 1 + 1 + 2 + 2 + 1 + 3 + 2 + 3 + 3 = 19. 2. Miltä kuvan pyöreä
Fy06 Koe 20.5.2015 Kuopion Lyseon lukio (KK) 1/7
 1/7") Fy06 Koe 0.5.015 Kuopion Lyseon lukio (KK) 1/7 alitse kolme tehtävää. 6p/tehtävä. 1. Mitä mieltä olet seuraavista väitteistä. Perustele lyhyesti ovatko väitteet totta vai tarua. a. irtapiirin hehkulamput
Fy06 Koe 0.5.015 Kuopion Lyseon lukio (KK) 1/7 alitse kolme tehtävää. 6p/tehtävä. 1. Mitä mieltä olet seuraavista väitteistä. Perustele lyhyesti ovatko väitteet totta vai tarua. a. irtapiirin hehkulamput
Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta
 Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta Sanna Kaasalainen Kaukokartoituksen ja Fotogrammetrian Osasto Ilmastonmuutos ja ääriarvot 13.9.2012 Ympäristön Aktiivinen
Ympäristön aktiivinen kaukokartoitus laserkeilaimella: tutkittua ja tulevaisuutta Sanna Kaasalainen Kaukokartoituksen ja Fotogrammetrian Osasto Ilmastonmuutos ja ääriarvot 13.9.2012 Ympäristön Aktiivinen
Ajotaitomerkkisäännöt matkailuautoille 2015
 Ajotaitomerkkisäännöt matkailuautoille 25 SF-Caravan ry. Turvatoimikunta Ajotaitomerkkisäännöt matkailuautoille 25 Johdanto SF-Caravan ry:n ja sen jäsenyhdistysten järjestämän ajotaitoharjoittelun tavoitteena
Ajotaitomerkkisäännöt matkailuautoille 25 SF-Caravan ry. Turvatoimikunta Ajotaitomerkkisäännöt matkailuautoille 25 Johdanto SF-Caravan ry:n ja sen jäsenyhdistysten järjestämän ajotaitoharjoittelun tavoitteena
LaserQC mittauksia laserin nopeudella
 LaserQC mittauksia laserin nopeudella 1/6 prosessi LaserQ mittaustulokset 20 sekunnissa! 2D-aihioiden mittojen manuaalinen tarkastus ja muistiinmerkintä on aikaa vievä prosessi. Lisäksi virheiden mahdollisuus
LaserQC mittauksia laserin nopeudella 1/6 prosessi LaserQ mittaustulokset 20 sekunnissa! 2D-aihioiden mittojen manuaalinen tarkastus ja muistiinmerkintä on aikaa vievä prosessi. Lisäksi virheiden mahdollisuus
FYSIIKAN LABORATORIOTYÖT 2 HILA JA PRISMA
 FYSIIKAN LABORATORIOTYÖT HILA JA PRISMA MIKKO LAINE 9. toukokuuta 05. Johdanto Tässä työssä muodostamme lasiprisman dispersiokäyrän ja määritämme työn tekijän silmän herkkyysrajan punaiselle valolle. Lisäksi
FYSIIKAN LABORATORIOTYÖT HILA JA PRISMA MIKKO LAINE 9. toukokuuta 05. Johdanto Tässä työssä muodostamme lasiprisman dispersiokäyrän ja määritämme työn tekijän silmän herkkyysrajan punaiselle valolle. Lisäksi
Tekijä Pitkä matematiikka
 K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
K1 Tekijä Pitkä matematiikka 5 7..017 a) 1 1 + 1 = 4 + 1 = 3 = 3 4 4 4 4 4 4 b) 1 1 1 = 4 6 3 = 5 = 5 3 4 1 1 1 1 1 K a) Koska 3 = 9 < 10, niin 3 10 < 0. 3 10 = (3 10 ) = 10 3 b) Koska π 3,14, niin π
Avaruuslävistäjää etsimässä
 Avaruuslävistäjää etsimässä Avainsanat: avaruusgeometria, mittaaminen Luokkataso: 6.-9. lk, lukio Välineet: lankaa, särmiön muotoisia kartonkisia pakkauksia(esim. maitotölkki tms.), sakset, piirtokolmio,
Avaruuslävistäjää etsimässä Avainsanat: avaruusgeometria, mittaaminen Luokkataso: 6.-9. lk, lukio Välineet: lankaa, särmiön muotoisia kartonkisia pakkauksia(esim. maitotölkki tms.), sakset, piirtokolmio,
Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Lue ohjeet huolellisesti!
 MAA3 Koe 1.4.2014 Jussi Tyni Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Lue ohjeet huolellisesti! A-Osio: Ei saa käyttää laskinta. MAOL saa olla alusta asti käytössä. Maksimissaan
MAA3 Koe 1.4.2014 Jussi Tyni Tee konseptiin pisteytysruudukko! Muista kirjata nimesi ja ryhmäsi. Lue ohjeet huolellisesti! A-Osio: Ei saa käyttää laskinta. MAOL saa olla alusta asti käytössä. Maksimissaan
1. Skannaus ja tekstintunnistus (OCR) verkkoskannerilta
 verkkoskannerilta") M-Files OCR M-Files OCR:n avulla voidaan skannattavalle paperidokumentille tehdä tekstintunnistus skannerista riippumatta. Tällöin tekstiä sisältävät kuvat tunnistetaan varsinaisiksi tekstimerkeiksi, jonka
M-Files OCR M-Files OCR:n avulla voidaan skannattavalle paperidokumentille tehdä tekstintunnistus skannerista riippumatta. Tällöin tekstiä sisältävät kuvat tunnistetaan varsinaisiksi tekstimerkeiksi, jonka
Luento 10: Optinen 3-D mittaus ja laserkeilaus
 Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
Maa-57.301 Fotogrammetrian yleiskurssi Luento-ohjelma 1 2 3 4 5 6 7 8 9 10 (P. Rönnholm / H. Haggrén, 19.10.2004) Luento 10: Optinen 3-D mittaus ja laserkeilaus AIHEITA Optinen 3-D digitointi Etäisyydenmittaus
JÄTEHUOLLON ERIKOISTYÖ
 Jari-Jussi Syrjä 1200715 JÄTEHUOLLON ERIKOISTYÖ Typpioksiduulin mittaus GASMET-monikaasuanalysaattorilla Tekniikka ja Liikenne 2013 1. Johdanto Erikoistyön tavoitteena selvittää Vaasan ammattikorkeakoulun
Jari-Jussi Syrjä 1200715 JÄTEHUOLLON ERIKOISTYÖ Typpioksiduulin mittaus GASMET-monikaasuanalysaattorilla Tekniikka ja Liikenne 2013 1. Johdanto Erikoistyön tavoitteena selvittää Vaasan ammattikorkeakoulun
2.3 Voiman jakaminen komponentteihin
 Seuraavissa kappaleissa tarvitaan aina silloin tällöin taitoa jakaa voima komponentteihin sekä myös taitoa suorittaa sille vastakkainen operaatio eli voimien resultantin eli kokonaisvoiman laskeminen.
Seuraavissa kappaleissa tarvitaan aina silloin tällöin taitoa jakaa voima komponentteihin sekä myös taitoa suorittaa sille vastakkainen operaatio eli voimien resultantin eli kokonaisvoiman laskeminen.
Avaruuden kolme sellaista pistettä, jotka eivät sijaitse samalla suoralla, määräävät
 11 Taso Avaruuden kolme sellaista pistettä, jotka eivät sijaitse samalla suoralla, määräävät tason. Olkoot nämä pisteet P, B ja C. Merkitään vaikkapa P B r ja PC s. Tällöin voidaan sanoa, että vektorit
11 Taso Avaruuden kolme sellaista pistettä, jotka eivät sijaitse samalla suoralla, määräävät tason. Olkoot nämä pisteet P, B ja C. Merkitään vaikkapa P B r ja PC s. Tällöin voidaan sanoa, että vektorit
Jousen jousivoiman riippuvuus venymästä
 1 Jousen jousivoiman riippuvuus venymästä Mikko Vestola Koulun nimi Fysiikka luonnontieteenä FY3-Projektityö 12..2002 Arvosana: K+ (10) 2 1. Tutkittava ilmiö Tehtävänä oli tehdä oppikirjan tutkimustehtävä
1 Jousen jousivoiman riippuvuus venymästä Mikko Vestola Koulun nimi Fysiikka luonnontieteenä FY3-Projektityö 12..2002 Arvosana: K+ (10) 2 1. Tutkittava ilmiö Tehtävänä oli tehdä oppikirjan tutkimustehtävä
Oikeanlaisten virtapihtien valinta Aloita vastaamalla seuraaviin kysymyksiin löytääksesi oikeantyyppiset virtapihdit haluamaasi käyttökohteeseen.
 Oikeanlaisten virtapihtien valinta Aloita vastaamalla seuraaviin kysymyksiin löytääksesi oikeantyyppiset virtapihdit haluamaasi käyttökohteeseen. 1. Tuletko mittaamaan AC tai DC -virtaa? (DC -pihdit luokitellaan
Oikeanlaisten virtapihtien valinta Aloita vastaamalla seuraaviin kysymyksiin löytääksesi oikeantyyppiset virtapihdit haluamaasi käyttökohteeseen. 1. Tuletko mittaamaan AC tai DC -virtaa? (DC -pihdit luokitellaan
DATALOGGERI DT-171 PIKAKÄYTTÖOHJE V 1.2
 DATALOGGERI DT-171 PIKAKÄYTTÖOHJE V 1.2 S&A Matintupa 2007 Ohjelman käynnistys Ohjelma käynnistyy tuplaklikkaamalla DATALOGGER ohjelmakuvaketta. Ohjelma avautuu tuplaklikkaamalla Datalogger kuvaketta.
DATALOGGERI DT-171 PIKAKÄYTTÖOHJE V 1.2 S&A Matintupa 2007 Ohjelman käynnistys Ohjelma käynnistyy tuplaklikkaamalla DATALOGGER ohjelmakuvaketta. Ohjelma avautuu tuplaklikkaamalla Datalogger kuvaketta.
Pyramidin yleiset säännöt
 Pyramidin yleiset säännöt 1. Biljardivälineet ja tarvikkeet Seuraavassa kuvattuihin pyramidi -pelin versioiden pelaamiseen tarvittavat välineet ovat biljardipöytä, pallot sekä apuvälineet (mm. resti).
Pyramidin yleiset säännöt 1. Biljardivälineet ja tarvikkeet Seuraavassa kuvattuihin pyramidi -pelin versioiden pelaamiseen tarvittavat välineet ovat biljardipöytä, pallot sekä apuvälineet (mm. resti).
Määräys ajoneuvoyhdistelmien teknisistä vaatimuksista
 Määräys ajoneuvoyhdistelmien teknisistä vaatimuksista Trafin säädösinfo 27.11.2018 Otto Lahti Vastuullinen liikenne. Rohkeasti yhdessä. LVM:n hanke asetusmuutoksesta raskaiden ajoneuvon yhdistelmien pituuden
Määräys ajoneuvoyhdistelmien teknisistä vaatimuksista Trafin säädösinfo 27.11.2018 Otto Lahti Vastuullinen liikenne. Rohkeasti yhdessä. LVM:n hanke asetusmuutoksesta raskaiden ajoneuvon yhdistelmien pituuden
Käyttöopas kahden kameran väliseen tiedostojen siirtoon
 Canon-digitaalikamera Käyttöopas kahden kameran väliseen tiedostojen siirtoon Sisällysluettelo Johdanto....................................... 1 Kuvien siirtäminen langattomassa yhteydessä........ 2 Kameran
Canon-digitaalikamera Käyttöopas kahden kameran väliseen tiedostojen siirtoon Sisällysluettelo Johdanto....................................... 1 Kuvien siirtäminen langattomassa yhteydessä........ 2 Kameran
MAB3 - Harjoitustehtävien ratkaisut:
 MAB - Harjoitustehtävien ratkaisut: Funktio. Piirretään koordinaatistoakselit ja sijoitetaan pisteet:. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä. Funktiolla
MAB - Harjoitustehtävien ratkaisut: Funktio. Piirretään koordinaatistoakselit ja sijoitetaan pisteet:. a) Funktioiden nollakohdat löydetään etsimällä kuvaajien ja - akselin leikkauspisteitä. Funktiolla
Muita kuvankäsittelyohjelmia on mm. Paint Shop Pro, Photoshop Elements, Microsoft Office Picture Manager
 Missio: 1. Asentaminen 2. Valokuvien tarkastelu, tallennus/formaatit, koko, tarkkuus, korjaukset/suotimet, rajaus 3. Kuvan luonti/työkalut (grafiikka kuvat) 4. Tekstin/grafiikan lisääminen kuviin, kuvien/grafiikan
Missio: 1. Asentaminen 2. Valokuvien tarkastelu, tallennus/formaatit, koko, tarkkuus, korjaukset/suotimet, rajaus 3. Kuvan luonti/työkalut (grafiikka kuvat) 4. Tekstin/grafiikan lisääminen kuviin, kuvien/grafiikan
KÄYTTÖOHJE. että istuin on kiinnitetty oikein.
 KÄYTTÖOHJE LASTENVAUNUJEN AVAAMINEN Aseta vaunut lattialle (kuva 1a) ja vedä lujasti kahvasta, kunnes taittomekanismi lukittuu (kuva 2, 3). HUOMAUTUS! Ennen kuin alat käyttää vaunuja, varmista, että ne
KÄYTTÖOHJE LASTENVAUNUJEN AVAAMINEN Aseta vaunut lattialle (kuva 1a) ja vedä lujasti kahvasta, kunnes taittomekanismi lukittuu (kuva 2, 3). HUOMAUTUS! Ennen kuin alat käyttää vaunuja, varmista, että ne
Julkaisun laji Opinnäytetyö. Sivumäärä 43
 OPINNÄYTETYÖN KUVAILULEHTI Tekijä(t) SUKUNIMI, Etunimi ISOVIITA, Ilari LEHTONEN, Joni PELTOKANGAS, Johanna Työn nimi Julkaisun laji Opinnäytetyö Sivumäärä 43 Luottamuksellisuus ( ) saakka Päivämäärä 12.08.2010
OPINNÄYTETYÖN KUVAILULEHTI Tekijä(t) SUKUNIMI, Etunimi ISOVIITA, Ilari LEHTONEN, Joni PELTOKANGAS, Johanna Työn nimi Julkaisun laji Opinnäytetyö Sivumäärä 43 Luottamuksellisuus ( ) saakka Päivämäärä 12.08.2010
Kolmioitten harjoituksia. Säännöllisten monikulmioitten harjoituksia. Pythagoraan lauseeseen liittyviä harjoituksia
 Kolmioitten harjoituksia Piirrä kolmio, jonka sivujen pituudet ovat 4cm, 5 cm ja 10 cm. Minkä yleisen kolmion sivujen pituuksia ja niitten eroja koskevan johtopäätöksen vedät? Määritä huippukulman α suuruus,
Kolmioitten harjoituksia Piirrä kolmio, jonka sivujen pituudet ovat 4cm, 5 cm ja 10 cm. Minkä yleisen kolmion sivujen pituuksia ja niitten eroja koskevan johtopäätöksen vedät? Määritä huippukulman α suuruus,
AUTOCAD-TULOSTUSOHJE. Tällä ohjeella selitetään Autocadin mittakaavatulostuksen perusasiat (mallin mittayksikkönä millimetrit)
") AUTOCAD-TULOSTUSOHJE Tällä ohjeella selitetään Autocadin mittakaavatulostuksen perusasiat (mallin mittayksikkönä millimetrit) 1. MODEL VS. LAYOUT Autocadista löytyy vasemmasta alakulmasta automaattisesti
AUTOCAD-TULOSTUSOHJE Tällä ohjeella selitetään Autocadin mittakaavatulostuksen perusasiat (mallin mittayksikkönä millimetrit) 1. MODEL VS. LAYOUT Autocadista löytyy vasemmasta alakulmasta automaattisesti
Park systems XE-100 atomivoimamikroskoopin käyttöohje
 Tämä käyttöohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 Park systems XE-100 atomivoimamikroskoopin käyttöohje Mihin laitetta käytetään?
Tämä käyttöohje on kirjoitettu ESR-projektissa Mikroanturitekniikan osaamisen kehittäminen Itä-Suomen lääninhallitus, 2007, 86268 Park systems XE-100 atomivoimamikroskoopin käyttöohje Mihin laitetta käytetään?
Kemiönsaaren Nordanån merikotkatarkkailu kesällä 2017
 Kemiönsaaren Nordanån merikotkatarkkailu kesällä 2017 Tmi Vespertilio 11.8.2017 Tiivistelmä Kemiönsaaren Nordanå-Lövbölen alueelle suunnitellaan tuulivoimapuistoa. Varsinais-Suomen ELYkeskus on vuonna
Kemiönsaaren Nordanån merikotkatarkkailu kesällä 2017 Tmi Vespertilio 11.8.2017 Tiivistelmä Kemiönsaaren Nordanå-Lövbölen alueelle suunnitellaan tuulivoimapuistoa. Varsinais-Suomen ELYkeskus on vuonna
Kuvailulehti. Korkotuki, kannattavuus. Päivämäärä 03.08.2015. Tekijä(t) Rautiainen, Joonas. Julkaisun laji Opinnäytetyö. Julkaisun kieli Suomi
 Rautiainen, Joonas. Julkaisun laji Opinnäytetyö. Julkaisun kieli Suomi") Kuvailulehti Tekijä(t) Rautiainen, Joonas Työn nimi Korkotuetun vuokratalon kannattavuus Ammattilaisten mietteitä Julkaisun laji Opinnäytetyö Sivumäärä 52 Päivämäärä 03.08.2015 Julkaisun kieli Suomi Verkkojulkaisulupa
Kuvailulehti Tekijä(t) Rautiainen, Joonas Työn nimi Korkotuetun vuokratalon kannattavuus Ammattilaisten mietteitä Julkaisun laji Opinnäytetyö Sivumäärä 52 Päivämäärä 03.08.2015 Julkaisun kieli Suomi Verkkojulkaisulupa
2 Pistejoukko koordinaatistossa
 Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
Pistejoukko koordinaatistossa Ennakkotehtävät 1. a) Esimerkiksi: b) Pisteet sijaitsevat pystysuoralla suoralla, joka leikkaa x-akselin kohdassa x =. c) Yhtälö on x =. d) Sijoitetaan joitain ehdon toteuttavia
ASUINKERROSTALON ÄÄNITEKNISEN LAADUN ARVIOINTI. Mikko Kylliäinen
 ASUINKERROSTALON ÄÄNITEKNISEN LAADUN ARVIOINTI Mikko Kylliäinen Insinööritoimisto Heikki Helimäki Oy Dagmarinkatu 8 B 18, 00100 Helsinki kylliainen@kotiposti.net 1 JOHDANTO Suomen rakentamismääräyskokoelman
ASUINKERROSTALON ÄÄNITEKNISEN LAADUN ARVIOINTI Mikko Kylliäinen Insinööritoimisto Heikki Helimäki Oy Dagmarinkatu 8 B 18, 00100 Helsinki kylliainen@kotiposti.net 1 JOHDANTO Suomen rakentamismääräyskokoelman
Luento 4 Georeferointi
 Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)
Luento 4 Georeferointi 2008 Maa-57.1030 Fotogrammetrian perusteet 1 Sisältö Georeferointi käsitteenä Orientoinnit Stereokuvaparin mittaus Stereomallin ulkoinen orientointi (= absoluuttinen orientointi)