SATAKUNNAN AMMATTIKORKEAKOULU. Ville Pelkonen AUTOMAATIOJÄRJESTELMÄN 3D-MALLINTAMINEN
|
|
|
- Leo Saarnio
- 9 vuotta sitten
- Katselukertoja:
Transkriptio
1 SATAKUNNAN AMMATTIKORKEAKOULU Ville Pelkonen AUTOMAATIOJÄRJESTELMÄN 3D-MALLINTAMINEN Kone- ja tuotantotekniikan koulutusohjelma Automaatio- ja kunnossapitotekniikan suuntautumisvaihtoehto 2006

2 I TIIVISTELMÄ AUTOMAATIOJÄRJESTELMÄN 3D-MALLINTAMINEN Pelkonen Ville Samuli Satakunnan ammattikorkeakoulu Kone- ja tuotantotekniikan koulutusohjelma Automaatio- ja kunnossapidon suuntautumisvaihtoehto Tekniikan Porin yksikkö, Tekniikantie 2, Pori Joulukuu 2006 Valvojat: Teuvo Teinilä, Jorma Tuomela Avainsanat: kokoonpano, simulointi, SolidWorks UDK: , 62-2, Sivuja: 24 Tämän opinnäytetyön aiheena oli automaatiojärjestelmän 3D-mallintaminen. Tehtävänä oli mallintaa Satakunnan ammattikorkeakoulun automaatiolaboratoriossa sijaitsevan automaatiojärjestelmän komponenteista 3-D mallit. Lisäksi tehtävään sisältyi ohjaimen suunnittelu automaatiojärjestelmään kuuluvaan hihnakuljettimeen. Komponenttien mallintaminen suoritettiin SolidWorks-ohjelmalla. Mallinnetuista komponenteista koottiin automaatiojärjestelmää vastaava 3D-kokoonpano. Kokoonpanoa voidaan tulevaisuudessa käyttää apuna laitteiston toiminnan simuloinnissa. Komponentteja ei saanut mallintaa simuloinnin takia liian yksityiskohtaisesti. Alumiinipunnuksia kuljettavaan hihnakuljettimeen suunniteltiin ohjain, joka erottaa punnukset värin mukaan kolmelle eri kaistalle ja pysäyttää punnukset hihnakuljettimen päässä. Työn tuloksena saatiin automaatiojärjestelmästä simulointimalli. Simulointimallin avulla voidaan havainnollistaa järjestelmän toimintaa. Ohjaimen suunnittelun tuloksena syntyi kolme vaihtoehtoa hihnakuljettimen ohjaimeksi. Ohjaimena tullaan aluksi kokeilemaan yksinkertaisinta ohjainvaihtoehtoa.

3 II ABSTRACT 3-D MODELLING OF AUTOMATION SYSTEM Pelkonen Ville Samuli Satakunta University of Applied Sciences BSc Degree Programme in Mechanical Engineering Field of Specialisation Automation Engineering and Maintenance Technology School of Technology Pori Tekniikantie 2, Pori December 2006 Supervisors: Teuvo Teinilä, Jorma Tuomela Keywords: assembly, simulation, SolidWorks UDC: , 62-2, Pages: 24 The subject of this final year project was the 3D-modelling of an automation system. The task was to model 3-D models of the components of an automation system located in the Automation Laboratory at Satakunta University of Applied Sciences. Additionally, the task included designing a guide for a belt conveyor, included in the automation system. The modelling of components was carried out with SolidWorks program. A 3-D assembly equivalent to the automations system was assembled of the modelled components. The assembly can be used as an aid in simulating the function of the system. The components could not be modelled too much in detail because of simulation. A guide was designed to the belt conveyor carrying aluminium weights to separate the weights in three different lanes according to their colour and to stop the weights at the end of the belt conveyor. As a result of the study a simulation model was created of the automation system. With the help of this simulation model the function of the system can be illustrated. As a result of the designing of the guide three alternatives were created for the belt conveyor. At first the simplest alternative will be tested as a guide.

4 III ESIPUHE Opinnäytetyön teettäjänä toimi Satakunnan ammattikorkeakoulun Porin yksikkö. Päätarkoitus työssä oli saada automaatiolaboratorion automaatiojärjestelmästä 3Dmallit, joita voitaisiin käyttää simuloinnissa. Opinnäytetyöntyön valvojana toimi Teuvo Teinilä. Lisäksi työnteossa opastajana oli Jorma Tuomela laboratoriomestarin ominaisuudessa. Työ oli luonteeltaan hyvin selväpiirteinen, mutta ei sujunut kuitenkaan aivan ongelmitta. Työ opetti paremmaksi SolidWorks-ohjelman käyttäjäksi. Kiitän työn valvojia asiantuntevasta opastuksesta ja uhratusta työajasta tämän työn onnistumiseksi.

5 IV Tiivistelmä.I Abstract II Esipuhe III Sisällys... IV SISÄLLYS 1. JOHDANTO JÄRJESTELMÄN TOIMINNANKUVAUS LAITTEISTON KUVAUS Scara-robotti Sony SRX Robotin ominaisuudet Scara-robotit Kuljettimet Montech hihnakuljettimet Kuljetin JOT J Robottisolun kuljetin Panostaja Hissiportti OHJAIMEN SUUNNITTELU Ohjaimen kuvaus Ohjainvaihtoehdot Ohjain ilman lisälaitteitta Ohjain pystysylintereillä Ohjain pysäytysvivuilla SIMULOINTI Automaatiolaitteiston simulointi Yleistä simuloinnista D Create-simulointiohjelmisto TULOKSET LÄHDELUTTELO VIITTEET... 24

6 6 1. JOHDANTO Satakunnan ammattikorkeakoulussa on ollut tapana kehittää ja rakennella oppilastyönä erilaisia automaatiolaitteita sähkö- ja automaatiolaboratoriossa. Laitteistot on pyritty kokoamaan projektiluontoisesti pienien oppilasryhmien toimesta. Suurin projekti on nykyisin työn alla oleva automaatiolaitteisto, joka käsittää scara kokoonpanorobotin lisäksi useita eri kuljettimia ja hissisillan. Komponenteista kuljettimet ovat uusia ja robotti ja hissisilta on hankittu käytettyinä puretuista automaatio- ja elektroniikkalinjoista. Kokoonpanon laitteet ovat logiikkaohjattuja, lisäksi järjestelmään kuuluu ylemmän tason ohjaus. Automaatiolaitteisto on vielä testausvaiheessa ja siihen on suunnitteilla muutoksia. Laitteistoa tulee käyttämään etupäässä automaatio- ja sähköpuolen opiskelijat. Tehtävänäni oli mallintaa SolidWorks-ohjelmalla tähän automaatiolaitteistoon kuuluvista komponenteista 3D-mallit, joita myöhemmin voitaisiin käyttää apuna simuloinnissa. Komponentteja ei saanut mallintaa liian yksityiskohtaisesti, jotta laitteiston toimintaa pystyttäisiin havainnollistamaan sujuvasti simulointiohjelmalla. Lisäksi tehtävään sisältyi ohjaimen suunnittelu hihnakuljettimeen.

7 7 2. JÄRJESTELMÄN TOIMINNANKUVAUS Alumiinisia punnuksia (kuva 1) syötetään käsin hihnakuljettimelle TB-140. Ne syötetään värin mukaan kolmea eri kaistaa pitkin. Punnukset keskittyvät kuljettimen päässä olevan ohjaimen avulla aina samaan kohtaan, josta robotti käy hakemassa yhden punnuksen kerrallaan. Punnus laitetaan muovialustalle (kuva 2), jossa on paikat neljälle punnukselle. Muovialustat syötetään hihnakuljetinta TB-250 pitkin. Kun alusta on täysi, eli siinä on neljä samanväristä punnusta, se siirretään kahdessa tasossa toimivalle siirtokuljettimelle. Kuljettimen ylätasolta siirretään täydet muovialustat eteenpäin. Kuljettimessa on kierrossa muovialustojen kuljettamiseksi alumiinialustoja, joissa jokaisessa on kaksi kartionastaa muovialustojen keskittämiseksi oikeaan kohtaan alumiinialustalle. Kuljettimen molemmissa päissä on lyhyet kuljettimet, joilla toisella lasketaan valmis muovialusta punnuksineen sylinterin avulla kuljettimen alatasolle, toinen kuljetinhissi nostaa tyhjät alumiinialustat ylätasolle uudelleen käyttöön. Kun täysi muovialusta on laskettu kuljettimen alatasolle panostaja käy noutamassa alustan, ja siirtää sen JOT J204-kuljettimelle. Tällöin kuljettimen radan alla oleva valokenno havaitsee muovialustan ja JOT J204-kuljetin käynnistyy. Kuljettimen päästä alustat siirtyvät JOT J205-hissiin. Muovialustan saavuttua hissiin, hissin moottori käynnistyy ja hissin nostovaunu nostaa sen hammashihnan välityksellä ylöspäin missä nostovaunu pysähtyy mekaaniseen raja-anturiin. Tällöin hissin nostovaunun siirtokuljetin siirtää alustan hissin ylätasolla olevalle kuljettimelle, jolla alusta siirretään hissin toiselle puolelle vaunuun, jolla alusta lasketaan alas. Alustan päästyä alas hissistä se siirtyy TB-140 hihnakuljettimelle. Kuljettimelta alustat ohjataan punnuksien värin mukaan omalle kuljettimelle. Kuljettimien päissä olevat stopparit pysäyttävät alustat kuljettimien päähän. Kuljettimien päihin on suunnitteilla välivarasto, johon täydet alustat varastoitaisiin.

8 8 Kuva 1. Muovialusta Kuva 2. Alumiinipunnus

9 9 3. LAITTEISTON KUVAUS 3.1 Robotti Sony SRX-611 Robotti on scara-tyyppinen kokoonpanorobotti, mallia Sony SRX-611. Robotti koostuu robottikäsivarresta, ohjaimesta sekä käsiohjelmointilaitteesta käyttöpaneeleineen. Robotti on 4-akselinen ja jokaisen akselia ohjaa ACservomoottori. Robotti on tarkoitettu pienten kappaleiden kokoonpano- ja tarkastustöihin, sekä kappaleen käsittelyyn yleensä. Se onkin aiemmin toiminut matkapuhelimien kokoonpanolinjassa. Robotin ominaisuuksiin kuuluvat mm. multitasking-toiminto, PLC ja GUI (graafinen käyttöliittymä). Multitasking-toiminto mahdollistaa useamman tehtävän suorittamisen samanaikaisesti. Multitasking-ympäristössä robotin ohjaus on helppoa käyttämällä käsiohjelmointilaitetta, tällöin käyttäjällä on mahdollisuus ohjelmien siirtämiseen ja datan muokkaukseen myös robotin automaattisten toimintojen aikana. Robottiohjemat toimivat pyyhkäisymenetelmällä ja käyttämällä Boolean algebraa, robotin ohjelmointikielenä käytetään LUNA 5.0-ohjelmointikieltä./1/ Robotin ominaisuudet /1/ Toiminta-alue: 1.käsivarsi 220º, 2.käsivarsi ±150º, Z-akseli 150mm, R-akseli ±360º Liikenopeudet: (2kg kuormalla): Z-akseli 770mm/s, R-akseli 1150º/s, maksimilineaariliikenopeus 5200mm/s Paikoitustarkkuus: X-Y-tasossa ±0,01mm, Z-akseli ±0,02mm, R-akseli ±0,03mm Käsiteltävän työkappaleen enimmäispaino: 5kg Tuloja/lähtöjä: 40/40, laajennettavissa 184 lähtöön ja tuloon. Taskit eli tehtävät: 8 robotille ja 8 lisälaitteille
. Multitasking-toiminto mahdollistaa useamman tehtävän suorittamisen samanaikaisesti.")
10 Scara-robotit Scara-robotti on Japanissa vuonna 1972 Makitan toimesta kehitetty robottimalli, joka on tarkoitettu erityisesti tarkkaan ja nopeaan kokoonpano- ja asennustyöhön jossa käsitellään pieniä ja melko keveitä kappaleita. Scara-robottien käyttökohteissa liikkeet ovat yleensä pisteestä pisteeseen tyyppisiä, kuten palletointi- ja kokoonpanotehtävissä. Scara-robotit ovat suosittuja mm. automaatio- ja elektroniikkateollisuudessa. Scara-robotti koostuu pystysuorasta akselista ja siihen liitetystä käsivarresta. Käsivarsi on aina vaakasuorassa. Kolme ensimmäistä niveltä ovat kiertyviä, joilla kahdella ensimmäisellä säädetään tarttujan etäisyys pääakselista, eli paikoitetaan työkalu haluttuun pisteeseen, esim. työkappaleen yläpuolelle. Kolmennella nivelellä saadaan työkalu oikeaan kiertymäkulmaan työkappaleeseen nähden. Robottikäsivarsi liikkuu myös pääakselia pitkin ylös-alas-suunnassa, tällä liikkeellä poimitaan työkappale. Scara-robotit ovat yleensä 4-akselisia./2/ Scara-robottien etuina ovat hyvä kiihtyvyys ja robottikäsivarren nopeat liikkeet vaakatasossa, joten Scara-roboteilla sykliajat ovat lyhyitä. Scara-robotit ovat myös tarkkoja ja niillä saavutetaan robottikäsivarren rakenteen ansiosta hyvä luoksepäästävyys. Robotit vaativat myös vähän tilaa, tämä antaa lisää vapauksia järjestelmän muitten laitteitten sijoittamiseen. Scara-robottien käyttökohteita rajaavana tekijänä on robottikäsivarren jäykkyys pystysuunnassa, siksi kokoonpano onnistuu vain suoraan ylhäältä alaspäin. Scararobotit eivät sovellu raskaiden työkappaleiden käsittelyyn.

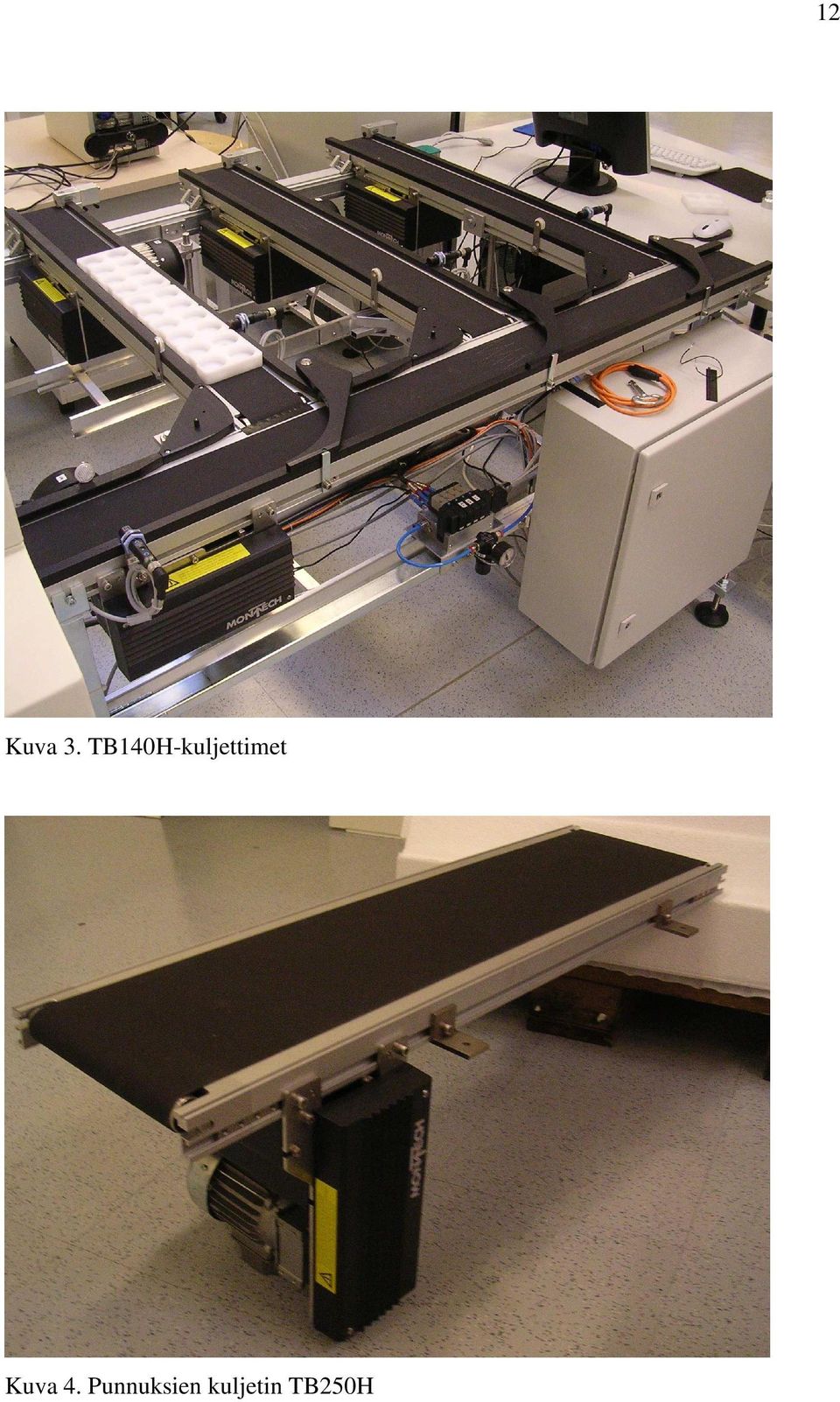
11 Kuljettimet Järjestelmään kuuluu yhteensä kuusi Montechin hihnakuljetinta. Muovialustojen kuljetin on malliltaan TB140V ja punnuksien kuljetin on malliltaan TB250V (kuva 4). Lisäksi linjan loppupäässä on neljän kuljettimen yhdistelmä (kuva 3), jolla ohjataan samanvärisiä punnuksia sisältävät muovialustat omalle kuljettimelleen. Loppupään kuljettimet ovat mallia TB140H, eli kuljettimen leveys on 140mm ja moottori on vaakasuunnassa. Pääkuljetin on pituudeltaan 1500mm, ja sitä vasten kohtisuorassa olevat kolme kuljetinta, joille punnukset päätyvät, ovat pituudeltaan 1000mm Montech hihnakuljettimet Montechin TB-hihnakuljettimia käytetään kiinteiden tuotteiden kuljettamiseen erilaisissa tehdaslaitoksissa tai valmiissa tuotantolinjoissa. Modulaarisen rakenteensa takia kuljettimet soveltuvat hyvin erilaisiin kuljetusratkaisuihin. Kuljettimia on yhdellä tai kahdella hihnalla varustettuna. Mitoiltaan suurien partikkelien kuljetukseen on kehitetty tandemkuljetin (TTBD), jossa kaksi kuljetinta on yhdistetty kardaaniakselilla ja kuljettimen hihnaa pyörittää yksi moottori. Kuljettimien moottorit ovat 3-vaihe-asykronimoottoreita, eli epätahtimoottoreita. Käyttöyksikön paikkaa moottoreineen voidaan muuttaa hihnakuljettimessa./3/ Kuljettimia on leveydeltään kuutta eri kokoa; 60mm, 80mm, 105mm, 140mm, 185mm ja 250mm. Näissä malleissa hihnanleveys on mm. Tavallisen kuljettimen minimipituus on 324mm, pisimmillään kuljettimen saa tarvittaessa 10m:n mittaiseksi. Kuljettimia voidaan lyhentää ja pidentää tarvittaessa./3/

12 12 Kuva 3. TB140H-kuljettimet Kuva 4. Punnuksien kuljetin TB250H
13 Kuljetin JOT J204 JOT J204-kuljettimet koostuvat korkeintaan kuudesta itse toimisesta kuljetinsegmentistä. Segmentit ovat pituudeltaan mm. Työkappaleen kuljetus kuljettimella tapahtuu kapeiden kuljetinhihnojen välityksellä. Valokennojen avulla pystytään pyörittämään oikeaa kuljetinhihnaa työkappaleen edetessä kuljettimella. Kuljettimia on neljää eri standardipituutta 500mm, 1000mm, 1500mm ja 2000mm, kyseinen kuljetin on pituudeltaan 2000mm ja koostuu neljästä kuljetinsegmentistä. Kuljettimen kokonaisleveys on 650mm ja radan leveys on säädettävissä. Radanleveys voi leveimmillään olla 320mm. Radan korkeus on säädettävissä välillä mm./4/ Robottisolun kuljetin Robottisolun kuljettimella siirretään täydet muovialustat panostajalle. Kuljetin toimii kahdessa tasossa. Ylätasolla robottikäsivarsi suorittaa palletoinnin, eli siirtää neljä alumiinipunnusta muovialustalle. Muovialustat paikoitetaan kuljettimessa kiertäviin alumiinialustoihin, joissa on kaksi paikoitusnastaa. Palletoinnin jälkeen alusta siirretään kuljettimen päässä olevaan hissivaunuun, joka laskee alustan alatasolle panostajan nostettavaksi. Panostajan nostettua muovialustan pois, tyhjä alumiinialusta siirretään alakautta toiselle hissivaunulle, joka nostaa sen uudelleen käytettäväksi ylätasolle. Hissit toimivat Norgrenin Lintra-sylintereillä.

14 Panostaja Panostaja (kuva 5) koostuu Bosch Rexrothin valmistamista pneumatiikkalaitteista, eli lineaarijohtimesta, liukusylinteristä ja tarttujasta, sekä toimilaitteiden ohjaamiseen käytettävistä kahdesta 5/2-suuntaventtiilistä, 5/3-suuntaventtilistä ja neljästä vastusvastaventtiilistä. Sylinterin maksimiliikepituus vaakasuunnassa lineaarijohtimella on 600mm, ja sylinterin iskunpituus on 200mm. 5/2-suuntaventtiileillä ohjataan sylinterin liikkeitä lineaarijohdinta pitkin vaakasuunnassa sekä tarttujan kourien avautumista ja sulkeutumista. 5/3- suuntaventtiilillä ohjataan sylinterin pystyliikettä. Vastusvastaventtiileillä rajoitetaan sylinterin liikenopeutta lineaarijohdinta pitkin ja sylinterin plus- ja miinusliikkeiden nopeutta. Kuva 5. Panostaja

15 Hissiportti JOT J205 Hissiportti (kuva 6) on hankittu käytettynä puretusta automaatiolinjasta. Tämän tyyppisiä hissiportteja käytetään järjestelmissä, joissa tuotanto- tai automaatiolinjan on kuljettava esim. kuljettimen yli. Hissiportin muodostaa kaksi hissiyksikköä ja niiden välissä oleva kuljetin. Molemmissa hissiyksiköissä on 0,7kW:n moottorit, jotka liikuttavat hammashihnan välityksellä hissivaunua ylös-alas-suunnassa. Hissivaunu liikkuu kiskoa pitkin. Vaakasuunnassa työkappale liikkuu hissivaunun kuljettimia ja hissin ylätason kuljetinta pitkin. Kuva 6. Hissiportti JOT J205

16 16 4. OHJAIMEN SUUNNITTELU 4.1 Ohjaimen kuvaus Punnuksien kuljetukseen käytettävään TB250H-hihnakuljettimeen piti suunnitella ohjain, joka ohjaisi punnukset aina samaan kohtaan hihnakuljettimen päässä. Koska punnukset ovat alumiinia, punnuksien keskittämiseen ei voinut käyttää magneetteja. Paikoituksen pitää tapahtua tarkasti ja takana olevat punnukset eivät saa liikaa kiilata nostettavaa punnusta, jotta robotin imukuppitarttuja saa pitävän otteen punnuksesta. Suunnittelun myötä syntyi kolme eri vaihtoehtoa ohjaimeksi, joista tulevaisuudessa tullaan valitsemaan ohjaimeksi toimivin vaihtoehto. Kaikki vaihtoehdot ovat tosin ohjaimen perusrakenteeltaan samanlaisia. Jokaisessa vaihtoehdossa kuljettimen pituussuunnassa kulkee kaksi välilevyä, jotka muodostavat kolmelle punnuksen värivaihtoehdolle kullekin oman kaistan. Välilevyt ovat muutamia millejä irti kuljettimen pinnasta. Ne ovat tuettuina yläpuolelta kahteen kuljettimen poikki kulkevaan palkkiin. Poikittaispalkeissa on välilevyjen tuentaa varten urat. Poikittaispalkkeja vastaavasti kannattelee molemmin puolin pystypalkit, jotka ovat kiinni kuljettimen sivujen profiiliurissa. Pystypalkeissa on kiinnitystä varten kierrereikä. Kuljettimen peräpäässä punnukset pysähtyvät stoppariin, joka on taivutettu alumiinilevystä, kuten välilevytkin. Stoppari on kiinni pystypalkeissa ruuveilla ja välilevyissä hitsaussaumalla.


17 Ohjainvaihtoehdot Ohjain ilman lisälaitteita Ensisijainen vaihtoehto ohjaimeksi on yksinkertainen ohjain, joka pysäyttää punnukset kuljettimen päähän. Punnuksen pysähdyttyä stoppariin valokenno havaitsee tämän ja robotti tarkastaa onko jollain kaistalla punnus noutopisteessä. Robotin havaittua punnuksen, kuljettimen hihna pysähtyy ja robotti noutaa punnuksen. Robotin annettua kuljettimelle käynnistymisluvan uusi punnus ohjautuu stoppariin. Kuljettimen hihnan pysäyttämisellä pyritään estämään nostettavan punnuksen puristuminen stopparin ja perässä tulevien punnusten väliin. Kuva 7. Ohjain ilman lisälaitteita


18 Ohjain pystysylintereillä Jos edellä mainittu ohjain ei ole sellaisenaan käyttökelpoinen, voidaan ohjaimen toimivuutta yrittää parantaa kuvan mukaisilla sylintereillä. Sylinterien tarkoituksena on päästää kerrallaan vain yksi punnus hihnan päähän. Sylinterin varsi työntyy alas, kun jälkimmäisen pystypalkin kohdalla oleva valokenno on havainnut etumaisen punnuksen. Sylinterin estää muita punnuksia pääsemästä stopparille, jolloin punnukset voidaan nostaa rauhassa yksi kerrallaan pois kuljettimelta. Tässä vaihtoehdossa hihnaa ei välttämättä tarvitse pysäyttää punnuksien pois nostamisen ajaksi. Kuva 8. Ohjain pystysylintereillä


19 Ohjain pysäytysvivuilla Kolmannessakin vaihtoehdossa pyritään päästämään vain yksi punnus kerrallaan stopparille. Tässä sylinterit ovat vaakatasossa ja reunimmaisten kaistojen sylinterit ovat kiinnitettynä pystypalkkeihin. Hankaluutena on sylinterin asennus keskikaistalle. Sylinteri liikuttaa vipua, joka painaa etumaisen punnuksen takana tulevan punnuksen välilevyä vasten estäen sitä pääsemästä stopparille. Jotta vipu pääsee liikkumaan kunnolla sivuun vapautettaessa seuraava punnus stopparille, on tässä vaihtoehdossa käytettävä päistään lyhennettyä stopparia. Kuva 9. Ohjain pysäytysvivuilla.

20 20 5. SIMULOINTI 5.1 Automaatiolaitteiston simulointi Solid Worksillä mallinnetuista automaatiolaitteiston komponenteista tehtiin kokoonpano, jota voidaan tulevaisuudessa käyttää simuloinnissa kuvaamaan automaatiolaitteistoa. Simuloinnin avulla voidaan tarkkailla laitteiston toimivuutta sen ollessa käynnissä. Simulointiohjelmana koululla on Visual Componentsin 3D Create simulointiohjelma. 5.2 Yleistä simuloinnista Simulointi on oikean prosessin mallintamista ja kokeiden tekemistä tehdyllä mallilla. Simuloinnin avulla voidaan parantaa tuotannon ennustettavuutta, riskienhallintaa sekä toimintaa ongelmatilanneissa. Yleisesti simulaatiolla tarkoitetaan prosessia, jossa jostakin systeemistä tehdään matemaattinen tai looginen malli, jonka avulla voidaan tehdä kuvaavia, selittäviä ja systeemin käyttäytymistä ennustavia kokeita. Simulointimallin avulla voidaan kokeilla järjestelmän käyttäytymistä eri tilanteissa, eli jäljitellä todellista järjestelmää. /5/ Simulaation päätarkoituksena on järjestelmän käyttäytymisen ennustaminen. Simulointimallin avulla järjestelmän dynamiikka ja riippuvuudet ovat helpommin hallittavissa, jolloin saadaan myös parempi yleiskuva järjestelmästä ja pystytään ymmärtämään paremmin järjestelmän toimintaa. Simuloinnista on apua etenkin uutta järjestelmää suunniteltaessa, jolloin voidaan simuloimalla varmistaa laitteiston oikeanlainen ja riittävän tehokas toimivuus. Simulointimallin avulla voidaan löytää järjestelmän ongelmakohdat etukäteen, ja etsiä näihin paremmat ratkaisut ennen todellisen järjestelmän käyttöönottoa./5/

21 D Create- simulointiohjelmisto 3D Create on Visual Components Oy:n valmistama komponenttipohjainen simulointiohjelmisto. 3DCreate:lla on mahdollista suorittaa simuloinnin kaikki työvaiheet: komponenttien ja mallien rakentamisesta niiden konfigurointiin, simulointiin ja tulosten visualisointiin. Komponenttiin voidaan tallentaa tuotteen hyödyllisiä ominaisuuksia, kuten: visuaalinen malli, laitteen toiminta, toimintaan vaikuttavat parametrit ja kytkeytyminen toisiin laiteisiin./6/ Komponenttipohjainen simulointi käsittää kolme osa-aluetta: käyttäytymismallin, visuaalisen mallin ja rajapinnat. Rajapinnan kautta komponentin voi liittää toiseen komponenttiin tai järjestelmään. Rajapinnan ansiosta voidaan liittää yhteen myös eri valmistajien komponentteja, sekä käyttää uudelleen jo mallinnettuja komponentteja. Laitteiden toiminnan mallintamiseen käytetään toiminto-objekteja, jotka mahdollistavat yksityiskohtaisen mallintamisen ilman kompromisseja./6/ Visuaalinen malli saadaan lähes aina jo olemassa olevista CAD-malleista, joita voi tarvittaessa muokata jälkikäteen. Visuaalinen malli ja toimintomalli sidotaan yhteen parametreillä. Muutettaessa parametriä, kuten kuljettimen pituutta, muuttuvat sekä kuljettimen visuaalinen esitys että simuloinnin käyttämät määrittelyt./6/
22 22 6. TULOKSET 3-D-mallintamisen tuloksena saatiin simulointimalli automaatiojärjestelmästä. Mallinnettu kokoonpano vastaa mitoiltaan kyseistä automaatiojärjestelmää. Simulointimallin toimivuutta ei ole vielä ehditty kokeilemaan simulointiohjelmalla. Ohjaimen suunnittelu poiki kolme vaihtoehtoa hihnakuljettimen ohjaimeksi. Alustavien suunnitelmien mukaan ohjaimeksi riittäisi ensimmäinen ohjainvaihtoehto, jossa ei tarvita sylinterejä tai muita lisäkomponentteja. Muiden ohjainvaihtoehtojen kokeilu tulee kyseeseen vain jos tämä vaihtoehto osoittautuu riittämättömäksi.
23 23 LÄHDELUETTELO 1. Sony SRX-611 manuaali Turunen, S (2002) Tapahtumapohjainen logististen prosessien simulointi Suomessa ja simuloinnin 3D-visualisointi. Erikoistyö. Teknillinen korkeakoulu. 6.
24 24 LIITTEET Liite1. Piirustus: TB140H-kuljettimet Liite2. Piirustus: panostaja Liite3. Piirustus: ohjain Liite4. Piirustus: ohjaimen osat Liite5. Piirustus: kokoonpanolinja sivusta
33. Valimohiekkojen kuljetuslaitteet
 33. Valimohiekkojen kuljetuslaitteet Raimo Keskinen Pekka Niemi - Tampereen ammattiopisto 33.1 Hihnakuljettimet Hihnakuljettimet ovat yleisimpiä valimohiekkojen siirtoon käytettävissä kuljetintyypeistä.
33. Valimohiekkojen kuljetuslaitteet Raimo Keskinen Pekka Niemi - Tampereen ammattiopisto 33.1 Hihnakuljettimet Hihnakuljettimet ovat yleisimpiä valimohiekkojen siirtoon käytettävissä kuljetintyypeistä.
Tuotantosolun simulointi
 Antti Alonen RFID -Tekniikan soveltaminen tuotantoteollisuudessa -hanke Tuotantosolun simulointi Konetekniikan TKI-yksikkö Tutkimus- ja kehityspalveluja sekä perusopetusta tukevaa toimintaa Toimialueet
Antti Alonen RFID -Tekniikan soveltaminen tuotantoteollisuudessa -hanke Tuotantosolun simulointi Konetekniikan TKI-yksikkö Tutkimus- ja kehityspalveluja sekä perusopetusta tukevaa toimintaa Toimialueet
Tuotannon simulointi. Teknologiademot on the road -hanke
 Tuotannon simulointi Teknologiademot on the road -hanke Simulointi Seamkissa Tuotannon simulointia on tarjottu palvelutoimintana yrityksille 90-luvun puolivälistä lähtien. Toteutettuja yritysprojekteja
Tuotannon simulointi Teknologiademot on the road -hanke Simulointi Seamkissa Tuotannon simulointia on tarjottu palvelutoimintana yrityksille 90-luvun puolivälistä lähtien. Toteutettuja yritysprojekteja
HARJOITUS 4 1. (E 5.29):
:") HARJOITUS 4 1. (E 5.29): Työkalulaatikko, jonka massa on 45,0 kg, on levossa vaakasuoralla lattialla. Kohdistat laatikkoon asteittain kasvavan vaakasuoran työntövoiman ja havaitset, että laatikko alkaa
HARJOITUS 4 1. (E 5.29): Työkalulaatikko, jonka massa on 45,0 kg, on levossa vaakasuoralla lattialla. Kohdistat laatikkoon asteittain kasvavan vaakasuoran työntövoiman ja havaitset, että laatikko alkaa
Jussi Klemola 3D- KEITTIÖSUUNNITTELUOHJELMAN KÄYTTÖÖNOTTO
 Jussi Klemola 3D- KEITTIÖSUUNNITTELUOHJELMAN KÄYTTÖÖNOTTO Opinnäytetyö KESKI-POHJANMAAN AMMATTIKORKEAKOULU Puutekniikan koulutusohjelma Toukokuu 2009 TIIVISTELMÄ OPINNÄYTETYÖSTÄ Yksikkö Aika Ylivieska
Jussi Klemola 3D- KEITTIÖSUUNNITTELUOHJELMAN KÄYTTÖÖNOTTO Opinnäytetyö KESKI-POHJANMAAN AMMATTIKORKEAKOULU Puutekniikan koulutusohjelma Toukokuu 2009 TIIVISTELMÄ OPINNÄYTETYÖSTÄ Yksikkö Aika Ylivieska
TUOTE-ESITTELY
 TUOTE-ESITTELY 24.09.2018 KOKOONPANOKÄRRY IT-Line kokoonpanokärry suurten tuotteiden kokoonpanoon. Korkeussäädettävään kokoonpanokärryyn on vapaasti lisättävissä työtason kallistus- sekä pyöritysominaisuus,
TUOTE-ESITTELY 24.09.2018 KOKOONPANOKÄRRY IT-Line kokoonpanokärry suurten tuotteiden kokoonpanoon. Korkeussäädettävään kokoonpanokärryyn on vapaasti lisättävissä työtason kallistus- sekä pyöritysominaisuus,
ja J r ovat vektoreita ja että niiden tulee olla otettu saman pyörimisakselin suhteen. Massapisteen hitausmomentti on
 FYSA210 / K1 HITAUSMOMENTTI Työn tavoitteena on opetella määrittämään kappaleen hitausmomentti kappaletta pyörittämällä ja samalla havainnollistaa kitkan vaikutusta. Massapisteinä toimivat keskipisteestään
FYSA210 / K1 HITAUSMOMENTTI Työn tavoitteena on opetella määrittämään kappaleen hitausmomentti kappaletta pyörittämällä ja samalla havainnollistaa kitkan vaikutusta. Massapisteinä toimivat keskipisteestään
Mitä ovat yhteistyörobotit. Yhteistyörobotit ovat uusia työkavereita, robotteja jotka on tehty työskentelemään yhdessä ihmisten kanssa.
 Yhteistyörobotiikka Mitä ovat yhteistyörobotit Yhteistyörobotit ovat uusia työkavereita, robotteja jotka on tehty työskentelemään yhdessä ihmisten kanssa. Yhteistyörobotit saapuvat juuri oikeaan aikaan
Yhteistyörobotiikka Mitä ovat yhteistyörobotit Yhteistyörobotit ovat uusia työkavereita, robotteja jotka on tehty työskentelemään yhdessä ihmisten kanssa. Yhteistyörobotit saapuvat juuri oikeaan aikaan
TEKNIIKAN YKSIKKÖ AUTOMAATIOTEKNIIKAN KOULUTUSOHJELMA AUT4SN TL7341 PROJEKTITYÖ OSA1 LEIPÄJUUSTON VALMISTUSLINJAN LOPPUPÄÄ
 TEKNIIKAN YKSIKKÖ AUTOMAATIOTEKNIIKAN KOULUTUSOHJELMA AUT4SN TL7341 PROJEKTITYÖ OSA1 LEIPÄJUUSTON VALMISTUSLINJAN LOPPUPÄÄ Ryhmä: Iiro Kettunen Heikki Föhr Esa Eronen Pvm: 10.9.2007 SISÄLTÖ 1 Lähtöaineisto...3
TEKNIIKAN YKSIKKÖ AUTOMAATIOTEKNIIKAN KOULUTUSOHJELMA AUT4SN TL7341 PROJEKTITYÖ OSA1 LEIPÄJUUSTON VALMISTUSLINJAN LOPPUPÄÄ Ryhmä: Iiro Kettunen Heikki Föhr Esa Eronen Pvm: 10.9.2007 SISÄLTÖ 1 Lähtöaineisto...3
Painevalut 3. Teoriatausta Revolved Pattern. Mallinnuksen vaiheet. CAD työkalut harjoituksessa diecasting_3_1.sldprt
 Painevalut 3 Tuula Höök Tampereen teknillinen yliopisto Hae aloituskappale start_diecasting_3_1.sldprt. Tehtävänäsi on suunnitella kansi alueille, jotka on merkitty kuvaan punaisella, vihreällä ja sinisellä
Painevalut 3 Tuula Höök Tampereen teknillinen yliopisto Hae aloituskappale start_diecasting_3_1.sldprt. Tehtävänäsi on suunnitella kansi alueille, jotka on merkitty kuvaan punaisella, vihreällä ja sinisellä
SATAKUNNAN AMMATTIKORKEAKOULU Sähkötekniikan koulutusohjelma. M-koodit Omron servojen ohjauksessa. Luovutettu. Hyväksytty
 SATAKUNNAN AMMATTIKORKEAKOULU Sähkötekniikan koulutusohjelma M-koodit Omron servojen ohjauksessa Tekijän nimi Ryhmätunnus Syventävä työ Jouni Lamminen EE01POS 4. vuosikurssin syventävä Luovutettu Hyväksytty
SATAKUNNAN AMMATTIKORKEAKOULU Sähkötekniikan koulutusohjelma M-koodit Omron servojen ohjauksessa Tekijän nimi Ryhmätunnus Syventävä työ Jouni Lamminen EE01POS 4. vuosikurssin syventävä Luovutettu Hyväksytty
POHJOIS-KARJALAN AMMATTIKORKEAKOULU Tietotekniikan koulutusohjelma. Mikael Partanen VAATIMUSMÄÄRITTELYT
 POHJOIS-KARJALAN AMMATTIKORKEAKOULU Tietotekniikan koulutusohjelma Mikael Partanen VAATIMUSMÄÄRITTELYT Opinnäytetyö Syyskuu 2011 SISÄLTÖ 1 JOHDANTO... 3 2 KÄSITTEET... 3 2.1 Kiinteistöautomaatio... 3 2.2
POHJOIS-KARJALAN AMMATTIKORKEAKOULU Tietotekniikan koulutusohjelma Mikael Partanen VAATIMUSMÄÄRITTELYT Opinnäytetyö Syyskuu 2011 SISÄLTÖ 1 JOHDANTO... 3 2 KÄSITTEET... 3 2.1 Kiinteistöautomaatio... 3 2.2
Siirtohyllystöt renkaiden ja rengassarjojen varastointiin Optimaalinen säilytyskapasiteetti ja turvallinen käsittely
 Siirtohyllystöt renkaiden ja rengassarjojen varastointiin Optimaalinen säilytyskapasiteetti ja turvallinen käsittely Tehokasta tilankäyttöä ja tehokkuutta Renkaiden ja rengassarjojen optimaalinen säilytys
Siirtohyllystöt renkaiden ja rengassarjojen varastointiin Optimaalinen säilytyskapasiteetti ja turvallinen käsittely Tehokasta tilankäyttöä ja tehokkuutta Renkaiden ja rengassarjojen optimaalinen säilytys
F2000 Karavaanimarkiisi
 Asennus ja käyttöohjeet F2000 Karavaanimarkiisi Lue käyttöohjeet huolellisesti ennen käyttöä! Pakkauksen sisältö NIMIKE KUVAUS 1 Kankaan lukitustanko 2 putki 3 Vasen varsi 4 Oikea varsi 5 Seinäkiinnike
Asennus ja käyttöohjeet F2000 Karavaanimarkiisi Lue käyttöohjeet huolellisesti ennen käyttöä! Pakkauksen sisältö NIMIKE KUVAUS 1 Kankaan lukitustanko 2 putki 3 Vasen varsi 4 Oikea varsi 5 Seinäkiinnike
Tuotteen hitsattavuuden testaus robottisimulointiohjelmalla. Kari Solehmainen Savonia Ammattikorkeakoulu HitSavonia
 Tuotteen hitsattavuuden testaus robottisimulointiohjelmalla Kari Solehmainen Savonia Ammattikorkeakoulu HitSavonia Sisältö Yhtenäissuunnittelu (Concurrent engineering) Mallinnus ja simulointi Robottihitsauksen
Tuotteen hitsattavuuden testaus robottisimulointiohjelmalla Kari Solehmainen Savonia Ammattikorkeakoulu HitSavonia Sisältö Yhtenäissuunnittelu (Concurrent engineering) Mallinnus ja simulointi Robottihitsauksen
LAITTEISTOKOKOONPANON SELVITTÄMINEN JA AJURIEN ASENTAMINEN
 LAITTEISTOKOKOONPANON SELVITTÄMINEN JA AJURIEN ASENTAMINEN Oma tietokone -valintaa klikkaamalla hiiren oikeanpuoleisella näppäimellä, saadaan näkyviin laitteistokokoonpano Ominaisuudet laitteisto -valinnalla:
LAITTEISTOKOKOONPANON SELVITTÄMINEN JA AJURIEN ASENTAMINEN Oma tietokone -valintaa klikkaamalla hiiren oikeanpuoleisella näppäimellä, saadaan näkyviin laitteistokokoonpano Ominaisuudet laitteisto -valinnalla:
FlyMarker PRO merkintälaite. Mark like a Professional
 FlyMarker PRO merkintälaite Mark like a Professional Mark like a Professional FlyMarker PRO Mobile Kannettavan FlyMarker PRO merkintälaitteen avulla suurten, raskaiden ja vaikeasti liikuteltavien kappaleiden
FlyMarker PRO merkintälaite Mark like a Professional Mark like a Professional FlyMarker PRO Mobile Kannettavan FlyMarker PRO merkintälaitteen avulla suurten, raskaiden ja vaikeasti liikuteltavien kappaleiden
S11-09 Control System for an. Autonomous Household Robot Platform
 S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
PASSION PROSYSTEM. Alumiininen piennosturijärjestelmä UUSI! ÄLYKKÄÄMPI JA TURVALLISEMPI. Since 1912
 PASSION IN CRANES PROSYSTEM Alumiininen piennosturijärjestelmä UUSI! ÄLYKKÄÄMPI JA TURVALLISEMPI Since 1912 PROSYSTEM Alumiininen piennosturijärjestelmä on maailman kehittynein työpajanosturi. Sen ainutlaatuiset
PASSION IN CRANES PROSYSTEM Alumiininen piennosturijärjestelmä UUSI! ÄLYKKÄÄMPI JA TURVALLISEMPI Since 1912 PROSYSTEM Alumiininen piennosturijärjestelmä on maailman kehittynein työpajanosturi. Sen ainutlaatuiset
Tietorakenteet, laskuharjoitus 7, ratkaisuja
 Tietorakenteet, laskuharjoitus, ratkaisuja. Seuraava kuvasarja näyttää B + -puun muutokset lisäysten jälkeen. Avaimet ja 5 mahtuvat lehtisolmuihin, joten niiden lisäys ei muuta puun rakennetta. Avain 9
Tietorakenteet, laskuharjoitus, ratkaisuja. Seuraava kuvasarja näyttää B + -puun muutokset lisäysten jälkeen. Avaimet ja 5 mahtuvat lehtisolmuihin, joten niiden lisäys ei muuta puun rakennetta. Avain 9
Perusopintojen Laboratoriotöiden Työselostus 1
 Perusopintojen Laboratoriotöiden Työselostus 1 Kalle Hyvönen Työ tehty 1. joulukuuta 008, Palautettu 30. tammikuuta 009 1 Assistentti: Mika Torkkeli Tiivistelmä Laboratoriossa tehdyssä ensimmäisessä kokeessa
Perusopintojen Laboratoriotöiden Työselostus 1 Kalle Hyvönen Työ tehty 1. joulukuuta 008, Palautettu 30. tammikuuta 009 1 Assistentti: Mika Torkkeli Tiivistelmä Laboratoriossa tehdyssä ensimmäisessä kokeessa
SIMULOINTIYMPÄRISTÖJEN SOVELTAMINEN OPETUKSESSA SIMULOINNILLA TUOTANTOA KEHITTÄMÄÄN-SEMINAARI TIMO SUVELA
 SOVELTAMINEN OPETUKSESSA SIMULOINNILLA TUOTANTOA KEHITTÄMÄÄN-SEMINAARI 2.12. TIMO SUVELA KUKA OLEN? Timo Suvela lehtori, sähkö- ja automaatiotekniikka (timo.suvela@samk.fi, 044-7103275) Nykyisyys SAMK:iin
SOVELTAMINEN OPETUKSESSA SIMULOINNILLA TUOTANTOA KEHITTÄMÄÄN-SEMINAARI 2.12. TIMO SUVELA KUKA OLEN? Timo Suvela lehtori, sähkö- ja automaatiotekniikka (timo.suvela@samk.fi, 044-7103275) Nykyisyys SAMK:iin
Silent Gliss 9020/21, 9040/41 ja 5091 moottorit. Uusi moottorisukupolvi
 Silent Gliss 9020/21, 9040/41 ja 5091 moottorit Uusi moottorisukupolvi Elämää helpottavia innovaatioita Silent Glissillä on yli 40 vuoden kokemus sähkötoimisista verhokiskoista. Toimme ensimmäisenä markkinoille
Silent Gliss 9020/21, 9040/41 ja 5091 moottorit Uusi moottorisukupolvi Elämää helpottavia innovaatioita Silent Glissillä on yli 40 vuoden kokemus sähkötoimisista verhokiskoista. Toimme ensimmäisenä markkinoille
Oikeat osat, oikeassa paikassa, oikeaan aikaan agilon
 Teollisuusnosturit Ydinvoimalanosturit Satamanosturit Raskaat haarukkatrukit Kunnossapito Työstökonehuolto MATERIAALINHALLINTA Oikeat osat, oikeassa paikassa, oikeaan aikaan agilon 2 Konecranes Agilon
Teollisuusnosturit Ydinvoimalanosturit Satamanosturit Raskaat haarukkatrukit Kunnossapito Työstökonehuolto MATERIAALINHALLINTA Oikeat osat, oikeassa paikassa, oikeaan aikaan agilon 2 Konecranes Agilon
LINEAARIKÄYTÖT. AT ja ATL hammashihnojen valmistusohjelma: AT AT3 AT5 AT10 AT20 ATL ATL5 ATL10 ATL20. Lineaarikäytöt AT ja ATL hammashihnoilla:
 LINEAARIKÄYTÖT Yleistä lineaarikäytöistä Pinoajat, lavaajat ja muut keräilyrobotit ovat tyypillisiä esimerkkejä lineaarikäytöistä. Perusajatuksena on käyttölaitteen pyörimisliikkeen muuttaminen pitkittäisliikkeeksi.
LINEAARIKÄYTÖT Yleistä lineaarikäytöistä Pinoajat, lavaajat ja muut keräilyrobotit ovat tyypillisiä esimerkkejä lineaarikäytöistä. Perusajatuksena on käyttölaitteen pyörimisliikkeen muuttaminen pitkittäisliikkeeksi.
KONEISTUSKOKOONPANON TEKEMINEN NX10-YMPÄRISTÖSSÄ
 KONEISTUSKOKOONPANON TEKEMINEN NX10-YMPÄRISTÖSSÄ https://community.plm.automation.siemens.com/t5/tech-tips- Knowledge-Base-NX/How-to-simulate-any-G-code-file-in-NX- CAM/ta-p/3340 Koneistusympäristön määrittely
KONEISTUSKOKOONPANON TEKEMINEN NX10-YMPÄRISTÖSSÄ https://community.plm.automation.siemens.com/t5/tech-tips- Knowledge-Base-NX/How-to-simulate-any-G-code-file-in-NX- CAM/ta-p/3340 Koneistusympäristön määrittely
FOCUS 650 KÄYTTÖOHJE
 FOCUS 650 KÄYTTÖOHJE Oikeus teknisiin muutoksiin pidätetään Z oom työtelineet ovat paljon enemmän kuin pelkkä työteline. Telineen kiinniytspaloja voidaan liikuttaa portaattomasti pöytäurissa ja pöydän
FOCUS 650 KÄYTTÖOHJE Oikeus teknisiin muutoksiin pidätetään Z oom työtelineet ovat paljon enemmän kuin pelkkä työteline. Telineen kiinniytspaloja voidaan liikuttaa portaattomasti pöytäurissa ja pöydän
TigerStop Standard Digitaalinen Syöttölaite / Stoppari
 Perkkoonkatu 5 Puh. 010 420 72 72 www.keyway.fi 33850 Tampere Fax. 010 420 72 77 palvelu@keyway.fi TigerStop Standard Digitaalinen Syöttölaite / Stoppari Malli Työpituus Kokonaispituus Standardi mm mm
Perkkoonkatu 5 Puh. 010 420 72 72 www.keyway.fi 33850 Tampere Fax. 010 420 72 77 palvelu@keyway.fi TigerStop Standard Digitaalinen Syöttölaite / Stoppari Malli Työpituus Kokonaispituus Standardi mm mm
kannet ja kotelot Tuula Höök Tampereen teknillinen yliopisto
 Metallisen kestomuottikappaleen suunnittelua 1, kannet ja kotelot Tuula Höök Tampereen teknillinen yliopisto Hae kokoonpano start_assembly_1_x.sldasm tai sitä vastaava neutraalimuotoinen tiedosto. Tehtävänäsi
Metallisen kestomuottikappaleen suunnittelua 1, kannet ja kotelot Tuula Höök Tampereen teknillinen yliopisto Hae kokoonpano start_assembly_1_x.sldasm tai sitä vastaava neutraalimuotoinen tiedosto. Tehtävänäsi
Eija Lahtinen Uudet kelikamerat Kaakkois-Suomen tiepiiri
 Eija Lahtinen Uudet kelikamerat Kaakkois-Suomen tiepiiri VIKING Eija Lahtinen Uudet kelikamerat Kaakkois-Suomen tiepiiri Tiehallinto Kaakkois-Suomen tiepiiri Liikenteen palvelut Kouvola 2001 Raportin
Eija Lahtinen Uudet kelikamerat Kaakkois-Suomen tiepiiri VIKING Eija Lahtinen Uudet kelikamerat Kaakkois-Suomen tiepiiri Tiehallinto Kaakkois-Suomen tiepiiri Liikenteen palvelut Kouvola 2001 Raportin
Simulation and modeling for quality and reliability (valmiin työn esittely) Aleksi Seppänen
 Aleksi Seppänen") Simulation and modeling for quality and reliability (valmiin työn esittely) Aleksi Seppänen 16.06.2014 Ohjaaja: Urho Honkanen Valvoja: Prof. Harri Ehtamo Työn saa tallentaa ja julkistaa Aalto-yliopiston
Simulation and modeling for quality and reliability (valmiin työn esittely) Aleksi Seppänen 16.06.2014 Ohjaaja: Urho Honkanen Valvoja: Prof. Harri Ehtamo Työn saa tallentaa ja julkistaa Aalto-yliopiston
Pride in being different KRABAT AS telefon: Pilot fax: www.krabat.com
 Pilot Krabat Pilot C KONTTAUS Krabat Pilot Palkinnot Krabat Pilot on innovatiivinen ja erilaista tyyppiä edustava konttaustuki. Perinteiset konttaustuet eivät tarjoa riittävästi dynaamista tukea lantion
Pilot Krabat Pilot C KONTTAUS Krabat Pilot Palkinnot Krabat Pilot on innovatiivinen ja erilaista tyyppiä edustava konttaustuki. Perinteiset konttaustuet eivät tarjoa riittävästi dynaamista tukea lantion
Snowblower 120 ATV TUOTE-ESITE 2014. Yhteystiedot: Rammy Oy Puh. 040 5574 999 www.rammy.fi rammy@rammy.fi 11.2.2014
 RAMMY Oy. Oikeudet muutoksiin pidätetään. TUOTE-ESITE 2014 Snowblower 120 ATV SISÄLTÖ: RAMMY Snowblower 120 ATV ominaisuudet Kauko-ohjain Tekniset tiedot Lumilinkopaketin sisältö Asennus mönkijään Varaosat
RAMMY Oy. Oikeudet muutoksiin pidätetään. TUOTE-ESITE 2014 Snowblower 120 ATV SISÄLTÖ: RAMMY Snowblower 120 ATV ominaisuudet Kauko-ohjain Tekniset tiedot Lumilinkopaketin sisältö Asennus mönkijään Varaosat
TEKNIIKAN YKSIKKÖ AUTOMAATIOTEKNIIKAN KOULUTUSOHJELMA AUT4SN TL7341, TL7321 OHJAUSLOGIIKAT 2 JA AUTOMAATIOJÄRJESTELMÄT 2 PROJEKTITYÖ
 TEKNIIKAN YKSIKKÖ AUTOMAATIOTEKNIIKAN KOULUTUSOHJELMA AUT4SN TL7341, TL7321 OHJAUSLOGIIKAT 2 JA AUTOMAATIOJÄRJESTELMÄT 2 PROJEKTITYÖ TERÄSRULLAN SIIRTO VARASTORAMPILTA PANIE- RINPOISTOON JA ASKELPALKILLE
TEKNIIKAN YKSIKKÖ AUTOMAATIOTEKNIIKAN KOULUTUSOHJELMA AUT4SN TL7341, TL7321 OHJAUSLOGIIKAT 2 JA AUTOMAATIOJÄRJESTELMÄT 2 PROJEKTITYÖ TERÄSRULLAN SIIRTO VARASTORAMPILTA PANIE- RINPOISTOON JA ASKELPALKILLE
K2 CombiCutter Mallit 1600 ja 1200
 K2 CombiCutter Mallit 1600 ja 1200 Pyöröpaalisilppuri ja ruokintakone Markkinoiden täydellisin ohjelma www.tks-as.no Kiinteä kone Vaunumalli Kattokiskoihin asennettu kone Täyttölava K2 COMBICUTTER Työtä
K2 CombiCutter Mallit 1600 ja 1200 Pyöröpaalisilppuri ja ruokintakone Markkinoiden täydellisin ohjelma www.tks-as.no Kiinteä kone Vaunumalli Kattokiskoihin asennettu kone Täyttölava K2 COMBICUTTER Työtä
VA K 0 LA. 1969 Koetusselostus 741 Test report
 VA K 0 LA Rukkila ACV Helsinki 10 12;Z Helsinki 43 41 61 Pitäjizinmäki VALTION MAATALOUSKONEIDEN TUTKIMUSLAITOS Finnish Research Institute of Engineering in Agriculture and Forestry 1969 Koetusselostus
VA K 0 LA Rukkila ACV Helsinki 10 12;Z Helsinki 43 41 61 Pitäjizinmäki VALTION MAATALOUSKONEIDEN TUTKIMUSLAITOS Finnish Research Institute of Engineering in Agriculture and Forestry 1969 Koetusselostus
Seurantalaskimen simulointi- ja suorituskykymallien vertailu (valmiin työn esittely) Joona Karjalainen
 Joona Karjalainen") Seurantalaskimen simulointi- ja suorituskykymallien vertailu (valmiin työn esittely) Joona Karjalainen 08.09.2014 Ohjaaja: DI Mikko Harju Valvoja: Prof. Kai Virtanen Työn saa tallentaa ja julkistaa Aalto-yliopiston
Seurantalaskimen simulointi- ja suorituskykymallien vertailu (valmiin työn esittely) Joona Karjalainen 08.09.2014 Ohjaaja: DI Mikko Harju Valvoja: Prof. Kai Virtanen Työn saa tallentaa ja julkistaa Aalto-yliopiston
Korjaamopuristimet. Alapalkki MITAT. H (Sylinteri palautettuna) mm. J mm
 mm. J mm") -runko 25 tonnia Voidaan asentaa työpöydälle tai lisävarusteena saatavalle jalustalle. Työpöytä asennusta varten tarvitaan 1.4 m 2 vapaata tilaa, jalustan kanssa tarvitaan 4 m 2 lattiatilaa. voin -runko
-runko 25 tonnia Voidaan asentaa työpöydälle tai lisävarusteena saatavalle jalustalle. Työpöytä asennusta varten tarvitaan 1.4 m 2 vapaata tilaa, jalustan kanssa tarvitaan 4 m 2 lattiatilaa. voin -runko
521365S Tietoliikenteen simuloinnit ja työkalut: Advanced Design System ADS
 521365S Tietoliikenteen simuloinnit ja työkalut: Advanced Design System ADS Juha-Pekka Mäkelä 26.4.2007 1 Sisältö 1. Johdanto 2. ADS:n rakenne 3. Simulointitasot 4. Käyttöympäristö 5. Esimerkkikuvia 6.
521365S Tietoliikenteen simuloinnit ja työkalut: Advanced Design System ADS Juha-Pekka Mäkelä 26.4.2007 1 Sisältö 1. Johdanto 2. ADS:n rakenne 3. Simulointitasot 4. Käyttöympäristö 5. Esimerkkikuvia 6.
Kaapelikelavaunu JKS 750V
 Kaapelikelavaunu JKS 750V Kaapelikelavaunu kevyempiin verkonrakennuksen tarpeisiin Kokonsa puolesta JKS 750 soveltuu erinomaisesti antenniurakoitsijoiden ja sähköasennusliikkeiden käyttöön. Vaunu on tarkoitettu
Kaapelikelavaunu JKS 750V Kaapelikelavaunu kevyempiin verkonrakennuksen tarpeisiin Kokonsa puolesta JKS 750 soveltuu erinomaisesti antenniurakoitsijoiden ja sähköasennusliikkeiden käyttöön. Vaunu on tarkoitettu
2.3 Voiman jakaminen komponentteihin
 Seuraavissa kappaleissa tarvitaan aina silloin tällöin taitoa jakaa voima komponentteihin sekä myös taitoa suorittaa sille vastakkainen operaatio eli voimien resultantin eli kokonaisvoiman laskeminen.
Seuraavissa kappaleissa tarvitaan aina silloin tällöin taitoa jakaa voima komponentteihin sekä myös taitoa suorittaa sille vastakkainen operaatio eli voimien resultantin eli kokonaisvoiman laskeminen.
Simulation model to compare opportunistic maintenance policies
 Simulation model to compare opportunistic maintenance policies Noora Torpo 31.08.18 Ohjaaja/Valvoja: Antti Punkka Työn saa tallentaa ja julkistaa Aalto-yliopiston avoimilla verkkosivuilla. Muilta osin
Simulation model to compare opportunistic maintenance policies Noora Torpo 31.08.18 Ohjaaja/Valvoja: Antti Punkka Työn saa tallentaa ja julkistaa Aalto-yliopiston avoimilla verkkosivuilla. Muilta osin
Päällirakenteen kiinnitys. Kiinnitys apurungon etuosassa
 Kiinnitys apurungon etuosassa Kiinnitys apurungon etuosassa Lisätietoa kiinnityksen valinnasta on asiakirjassa Apurungon valinta ja kiinnitys. Rungon etuosassa on 4 erityyppistä päällirakenteen kiinnikettä:
Kiinnitys apurungon etuosassa Kiinnitys apurungon etuosassa Lisätietoa kiinnityksen valinnasta on asiakirjassa Apurungon valinta ja kiinnitys. Rungon etuosassa on 4 erityyppistä päällirakenteen kiinnikettä:
Kon Simuloinnin Rakentaminen Janne Ojala
 Kon 16.4011 Simuloinnin Rakentaminen Janne Ojala Simulointi käytännössä 1/3 Simulaatiomalleja helppo analysoida Ymmärretään ongelmaa paremmin - Opitaan ymmärtämään koneen toimintaa ja siihen vaikuttavia
Kon 16.4011 Simuloinnin Rakentaminen Janne Ojala Simulointi käytännössä 1/3 Simulaatiomalleja helppo analysoida Ymmärretään ongelmaa paremmin - Opitaan ymmärtämään koneen toimintaa ja siihen vaikuttavia
Kattolaatikko Xperience
 Ohje nro Versio Osa nro 8698518 1.0 Kattolaatikko Xperience A8903209 Sivu 1 / 8 A8903214 Sivu 2 / 8 JOHDANTO Lue läpi koko ohje ennen asennuksen aloittamista. Huomautukset ja varoitustekstit ovat turvallisuuden
Ohje nro Versio Osa nro 8698518 1.0 Kattolaatikko Xperience A8903209 Sivu 1 / 8 A8903214 Sivu 2 / 8 JOHDANTO Lue läpi koko ohje ennen asennuksen aloittamista. Huomautukset ja varoitustekstit ovat turvallisuuden
Theory Finnish (Finland)
") Q1-1 Kaksi tehtävää mekaniikasta (10 pistettä) Lue yleisohjeet ennen tehtävien aloittamista. Osa A: Piilotettu kiekko (3,5 pistettä) Tässä tehtävässä käsitellään umpinaista puista sylinteriä, jonka säde
Q1-1 Kaksi tehtävää mekaniikasta (10 pistettä) Lue yleisohjeet ennen tehtävien aloittamista. Osa A: Piilotettu kiekko (3,5 pistettä) Tässä tehtävässä käsitellään umpinaista puista sylinteriä, jonka säde
RAKE-vastaanotinsimulaatio. 1. Työn tarkoitus. 2. Teoriaa. 3. Kytkentä. Tietoliikennelaboratorio Versio
 OAMK / Tekniikan yksikkö LABORATORIOTYÖOHJE Tietoliikennelaboratorio Versio 15.10.2004 RAKE-vastaanotinsimulaatio 1. Työn tarkoitus Tämän harjoitustyön tarkoituksena on RadioLab-simulointiohjelman avulla
OAMK / Tekniikan yksikkö LABORATORIOTYÖOHJE Tietoliikennelaboratorio Versio 15.10.2004 RAKE-vastaanotinsimulaatio 1. Työn tarkoitus Tämän harjoitustyön tarkoituksena on RadioLab-simulointiohjelman avulla
MASADOOR. autotallinovet. Asennusohje
 MASADOOR autotallinovet Asennusohje Tämä asennusohje on tehty ammattitaitoisen asentajan käyttöön. Ohjeessa on piirroksia, joissa on komponentteja, joita ei aina oveen asenneta. Ennen asennuksen aloittamista
MASADOOR autotallinovet Asennusohje Tämä asennusohje on tehty ammattitaitoisen asentajan käyttöön. Ohjeessa on piirroksia, joissa on komponentteja, joita ei aina oveen asenneta. Ennen asennuksen aloittamista
When Innovation & Nature Combine
 When Innovation & Nature Combine Yhdellä pystyruuvilla 8 14 16 sto Mixell 8 10 12 14 16 Kahdella pystyruuvilla 20 22 sto Mixell 20 22 24 26 30 Kolmella pystyruuvilla 40 30 sto Mixell 30 35 40 45 RMH lla
When Innovation & Nature Combine Yhdellä pystyruuvilla 8 14 16 sto Mixell 8 10 12 14 16 Kahdella pystyruuvilla 20 22 sto Mixell 20 22 24 26 30 Kolmella pystyruuvilla 40 30 sto Mixell 30 35 40 45 RMH lla
Rexroth Engineering Työkalumme tehokkaaseen suunnitteluun ja järjestelmien optimointiin
 Rexroth Engineering Työkalumme tehokkaaseen suunnitteluun ja järjestelmien optimointiin Rexroth Engineering Rexroth tarjoaa kattavan valikoiman työkaluja suunnitteluun, tuote- ja teknologiavalintaan, mitoitukseen,
Rexroth Engineering Työkalumme tehokkaaseen suunnitteluun ja järjestelmien optimointiin Rexroth Engineering Rexroth tarjoaa kattavan valikoiman työkaluja suunnitteluun, tuote- ja teknologiavalintaan, mitoitukseen,
DUOMIX PU 460 DUOMIX PU 280. 2-komponentti polyureajärjestelmät. Vaahtojärjestelmät
 DUOMIX PU 460 2-komponentti polyureajärjestelmät DUOMIX PU 280 Vaahtojärjestelmät DUOMIX PU 460 - KAKSIKOMPONENTTINEN POLYUREALAITTEISTO kas WIWA DUOMIX PU 460 on ideaalinen laiteratkaisu polyureapinnotteiden
DUOMIX PU 460 2-komponentti polyureajärjestelmät DUOMIX PU 280 Vaahtojärjestelmät DUOMIX PU 460 - KAKSIKOMPONENTTINEN POLYUREALAITTEISTO kas WIWA DUOMIX PU 460 on ideaalinen laiteratkaisu polyureapinnotteiden
ALIPAINEKULJETINHIHNAT
 ALIPAINEKULJETINHIHNAT Jotkut kuljettimet vaativat hihnakäytöiltä enemmän kuin tavalliset. Suuret nopeudet, kiihtyvyydet ja hidastuvuudet, paikoitustarkkuus tai kappaleen keveys aiheuttavat sen että normaali
ALIPAINEKULJETINHIHNAT Jotkut kuljettimet vaativat hihnakäytöiltä enemmän kuin tavalliset. Suuret nopeudet, kiihtyvyydet ja hidastuvuudet, paikoitustarkkuus tai kappaleen keveys aiheuttavat sen että normaali
Myynnin ja suunnittelun automatisoinnilla lisää tuottavuutta yrityksellesi
 Myynnin ja suunnittelun automatisoinnilla lisää tuottavuutta yrityksellesi Cielo on Ihme-3d Oy:n kehittämä pilvipohjainen, nettiselaimella käytettävä palvelu, jolla automatisoidaan mittatilaustyönä valmistettavien
Myynnin ja suunnittelun automatisoinnilla lisää tuottavuutta yrityksellesi Cielo on Ihme-3d Oy:n kehittämä pilvipohjainen, nettiselaimella käytettävä palvelu, jolla automatisoidaan mittatilaustyönä valmistettavien
Painevalut 3. Teoriatausta. Mallinnuksen vaiheet. CAD työkalut harjoituksessa diecasting_3_2.sldprt. CAE DS Kappaleensuunnitteluharjoitukset
 Painevalut 3 Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Hae aloituskappale start_diecasting_3_2.sldprt ja mallinna siihen kansi. CAD työkalut harjoituksessa diecasting_3_2.sldprt Kuva 1:
Painevalut 3 Juho Taipale, Tuula Höök Tampereen teknillinen yliopisto Hae aloituskappale start_diecasting_3_2.sldprt ja mallinna siihen kansi. CAD työkalut harjoituksessa diecasting_3_2.sldprt Kuva 1:
Gumenius Sebastian, Miettinen Mika Moottoripyörän käynnistysalusta
 Gumenius Sebastian, Miettinen Mika Moottoripyörän käynnistysalusta Metropolia Ammattikorkeakoulu Kone- ja tuotantotekniikka Projektisuunnitelma 23..204 Sisällys Lyhenteet Johdanto 2 Projektin tavoitteet
Gumenius Sebastian, Miettinen Mika Moottoripyörän käynnistysalusta Metropolia Ammattikorkeakoulu Kone- ja tuotantotekniikka Projektisuunnitelma 23..204 Sisällys Lyhenteet Johdanto 2 Projektin tavoitteet
WALTERSCHEID-NIVELAKSELI
 VA K OLA Postios. Helsinki Rukkila Puhelin Helsinki 43 48 1 2 Rautatieas. Pitäjänmäki VALTION MAATALOUSKONEIDEN TUTKIMUSLAITOS 1960 Koetusselostus 344 WALTERSCHEID-NIVELAKSELI Koetuttaja: nuko Oy, Helsinki.
VA K OLA Postios. Helsinki Rukkila Puhelin Helsinki 43 48 1 2 Rautatieas. Pitäjänmäki VALTION MAATALOUSKONEIDEN TUTKIMUSLAITOS 1960 Koetusselostus 344 WALTERSCHEID-NIVELAKSELI Koetuttaja: nuko Oy, Helsinki.
Kokemuksia hitsausautomaation käyttöönotosta
 Kokemuksia hitsausautomaation käyttöönotosta Savonia-ammattikorkeakoulu 11.05.2004 Automatisoinnin haasteita Kevyet ja väsymiskuormituksen alaiset rakenteet lujat materiaalit varsin monimutkaiset rakenteet
Kokemuksia hitsausautomaation käyttöönotosta Savonia-ammattikorkeakoulu 11.05.2004 Automatisoinnin haasteita Kevyet ja väsymiskuormituksen alaiset rakenteet lujat materiaalit varsin monimutkaiset rakenteet
kannet ja kotelot Tuula Höök Tampereen teknillinen yliopisto
 Metallisen kestomuottikappaleen suunnittelua 1, kannet ja kotelot Tuula Höök Tampereen teknillinen yliopisto Hae kokoonpano start_assembly_1_x.sldasm. Tehtävänäsi on suunnitella kansi alueille, jotka on
Metallisen kestomuottikappaleen suunnittelua 1, kannet ja kotelot Tuula Höök Tampereen teknillinen yliopisto Hae kokoonpano start_assembly_1_x.sldasm. Tehtävänäsi on suunnitella kansi alueille, jotka on
EUROOPAN PARLAMENTTI
 EUROOPAN PARLAMENTTI 1999 2004 Oikeudellisten ja sisämarkkina-asioiden valiokunta 11. huhtikuuta 2002 PE 301.518/Kompr.tark. 4-5 KOMPROMISSITARKISTUKSET 4-5 Mietintöluonnos (PE 301.518) Rainer Wieland
EUROOPAN PARLAMENTTI 1999 2004 Oikeudellisten ja sisämarkkina-asioiden valiokunta 11. huhtikuuta 2002 PE 301.518/Kompr.tark. 4-5 KOMPROMISSITARKISTUKSET 4-5 Mietintöluonnos (PE 301.518) Rainer Wieland
Nosturirobotti. robotin tarkoitus. mikä on robotin tehtävä. Kurssin robottiohjelmointi, kesä 2011 harjoitustyö
 Kurssin robottiohjelmointi, kesä 2011 harjoitustyö Juha Hämäläinen (juha.h.hamalainen@jyu.fi) Jussi Jokinen (jussi.p.p.jokinen@jyu.fi) Videoita robotin toiminnasta: http://www.youtube.com/user/hamismies
Kurssin robottiohjelmointi, kesä 2011 harjoitustyö Juha Hämäläinen (juha.h.hamalainen@jyu.fi) Jussi Jokinen (jussi.p.p.jokinen@jyu.fi) Videoita robotin toiminnasta: http://www.youtube.com/user/hamismies
Tilavuusvirta maks. 160 l/min Paine maks. 11 bar OILFREE.AIR
 Tilavuusvirta maks. 160 l/min Paine maks. 11 bar OILFREE.AIR Sarja i.comp 3 Mahdollisuuksien summa tekee siitä erilaisen. Uuden käyttökonseptin ansiosta i.comp 3 tuottaa yksilöllisesti työn vaatiman paineilman.
Tilavuusvirta maks. 160 l/min Paine maks. 11 bar OILFREE.AIR Sarja i.comp 3 Mahdollisuuksien summa tekee siitä erilaisen. Uuden käyttökonseptin ansiosta i.comp 3 tuottaa yksilöllisesti työn vaatiman paineilman.
EMVHost Online SUBJECT: EMVHOST ONLINE CLIENT - AUTOMAATTISIIRROT COMPANY: EMVHost Online Client sovelluksen käyttöohje AUTHOR: DATE: 15.03.
 EMVHost Online SUBJECT: COMPANY: COMMENTS: AUTHOR: EMVHOST ONLINE CLIENT - AUTOMAATTISIIRROT NETS OY EMVHost Online Client sovelluksen käyttöohje NETS OY DATE: 15.03.2011 VERSION: 1.0 1 SISÄLLYS SISÄLLYS...
EMVHost Online SUBJECT: COMPANY: COMMENTS: AUTHOR: EMVHOST ONLINE CLIENT - AUTOMAATTISIIRROT NETS OY EMVHost Online Client sovelluksen käyttöohje NETS OY DATE: 15.03.2011 VERSION: 1.0 1 SISÄLLYS SISÄLLYS...
PROJECT X. 2D tarkastuksen standardi Mittausteknologian edelläkävijä
 PROJECT X 2D tarkastuksen standardi Mittausteknologian edelläkävijä 2-dimensioinen kameramittausjärjestelmä Project X.. 2D mittauksen standardi Project X on erilainen. Siinä on otettu käyttöön aivan uusi,
PROJECT X 2D tarkastuksen standardi Mittausteknologian edelläkävijä 2-dimensioinen kameramittausjärjestelmä Project X.. 2D mittauksen standardi Project X on erilainen. Siinä on otettu käyttöön aivan uusi,
KATSASTUKSEEN JA KORJAAMOILLE SÄHKÖHYDRAULISET AJOSILTANOSTIMET
 KATSASTUKSEEN JA KORJAAMOILLE SÄHKÖHYDRAULISET AJOSILTANOSTIMET SÄHKÖHYDRAULISET AJOSILTANOSTIMET UC 4000 K UC 4000 K TANDEM UC 6000 K Nordlift UC -nostimilla nostat tuottavuuttasi: Nopea nosto, automaattinen
KATSASTUKSEEN JA KORJAAMOILLE SÄHKÖHYDRAULISET AJOSILTANOSTIMET SÄHKÖHYDRAULISET AJOSILTANOSTIMET UC 4000 K UC 4000 K TANDEM UC 6000 K Nordlift UC -nostimilla nostat tuottavuuttasi: Nopea nosto, automaattinen
Määräys ajoneuvoyhdistelmien teknisistä vaatimuksista
 Määräys ajoneuvoyhdistelmien teknisistä vaatimuksista Trafin säädösinfo 27.11.2018 Otto Lahti Vastuullinen liikenne. Rohkeasti yhdessä. LVM:n hanke asetusmuutoksesta raskaiden ajoneuvon yhdistelmien pituuden
Määräys ajoneuvoyhdistelmien teknisistä vaatimuksista Trafin säädösinfo 27.11.2018 Otto Lahti Vastuullinen liikenne. Rohkeasti yhdessä. LVM:n hanke asetusmuutoksesta raskaiden ajoneuvon yhdistelmien pituuden
LIITE 9: Kansilinjan prosessikuvaus Page 1 of 6 RISKIKARTOITUS KANSILINJAN PROSESSIKUVAUS
 LIITE 9: Kansilinjan prosessikuvaus Page 1 of 6 RISKIKARTOITUS KANSILINJAN PROSESSIKUVAUS o Kuivasolu KJS (kansijyrsinsolu) valun pintojen jyrsintä ja viimeistely, ryhmäpuolen pinnan viimeistely jää Johnfordille.
LIITE 9: Kansilinjan prosessikuvaus Page 1 of 6 RISKIKARTOITUS KANSILINJAN PROSESSIKUVAUS o Kuivasolu KJS (kansijyrsinsolu) valun pintojen jyrsintä ja viimeistely, ryhmäpuolen pinnan viimeistely jää Johnfordille.
EUROOPAN PARLAMENTTI
 EUROOPAN PARLAMENTTI 1999 2004 Oikeudellisten ja sisämarkkina-asioiden valiokunta 16. tammikuuta 2002 PE 301.518/1-3 KOMPROMISSITARKISTUKSET 1-3 Mietintöluonnos (PE 301.518) Rainer Wieland Ehdotus Euroopan
EUROOPAN PARLAMENTTI 1999 2004 Oikeudellisten ja sisämarkkina-asioiden valiokunta 16. tammikuuta 2002 PE 301.518/1-3 KOMPROMISSITARKISTUKSET 1-3 Mietintöluonnos (PE 301.518) Rainer Wieland Ehdotus Euroopan
Tehtävä 2: Manipulaattoriaseman asennus, ohjelmointi ja käyttöönotto
 Tehtävä 2: Manipulaattoriaseman asennus, ohjelmointi ja käyttöönotto Pisteet 25/100 t max 210 min Muistitikulla on lisämateriaalia! Tehtävän kuvaus Kilpailijapari vastaa tuotantolinjan (Handling station)
Tehtävä 2: Manipulaattoriaseman asennus, ohjelmointi ja käyttöönotto Pisteet 25/100 t max 210 min Muistitikulla on lisämateriaalia! Tehtävän kuvaus Kilpailijapari vastaa tuotantolinjan (Handling station)
KÄYTTÖOHJE. että istuin on kiinnitetty oikein.
 KÄYTTÖOHJE LASTENVAUNUJEN AVAAMINEN Aseta vaunut lattialle (kuva 1a) ja vedä lujasti kahvasta, kunnes taittomekanismi lukittuu (kuva 2, 3). HUOMAUTUS! Ennen kuin alat käyttää vaunuja, varmista, että ne
KÄYTTÖOHJE LASTENVAUNUJEN AVAAMINEN Aseta vaunut lattialle (kuva 1a) ja vedä lujasti kahvasta, kunnes taittomekanismi lukittuu (kuva 2, 3). HUOMAUTUS! Ennen kuin alat käyttää vaunuja, varmista, että ne
Määrittelydokumentti
 Määrittelydokumentti Aineopintojen harjoitustyö: Tietorakenteet ja algoritmit (alkukesä) Sami Korhonen 014021868 sami.korhonen@helsinki. Tietojenkäsittelytieteen laitos Helsingin yliopisto 23. kesäkuuta
Määrittelydokumentti Aineopintojen harjoitustyö: Tietorakenteet ja algoritmit (alkukesä) Sami Korhonen 014021868 sami.korhonen@helsinki. Tietojenkäsittelytieteen laitos Helsingin yliopisto 23. kesäkuuta
-RAKENNUSSIRKKELI UUTUUS! RAKENNUSSIRKKELI RS 400/450 LISÄVARUSTEET. SIVUPÖYTÄ leveys 600 mm pituus 685 mm. PÄÄTYPÖYTÄ leveys 685 mm pituus 530 mm
 -RAKENNUSSIRKKELI RAKENNUSSIRKKELI RS 400/450 4,0 (otto 4,82) kw/400v, 2800 r/min, IP 54, sähkömagneettisella jarrulla Kuvan sirkkeli lisävarustein. ESKO-rakennussirkkeli on kovaan ammattikäyttöön tarkoitettu
-RAKENNUSSIRKKELI RAKENNUSSIRKKELI RS 400/450 4,0 (otto 4,82) kw/400v, 2800 r/min, IP 54, sähkömagneettisella jarrulla Kuvan sirkkeli lisävarustein. ESKO-rakennussirkkeli on kovaan ammattikäyttöön tarkoitettu
Tutustuminen tuotantolinjastoon
 Tutustuminen tuotantolinjastoon Hands-on harjoitus 1 1 Tehtävät 2 Tuotantolinjasto yleisesti 2.1 Asemien käsitteleminen (Kuva 1) 2.2 Tuotantolinjaston toiminta 3 Jakeluaseman kuvaus 4 Testausaseman kuvaus
Tutustuminen tuotantolinjastoon Hands-on harjoitus 1 1 Tehtävät 2 Tuotantolinjasto yleisesti 2.1 Asemien käsitteleminen (Kuva 1) 2.2 Tuotantolinjaston toiminta 3 Jakeluaseman kuvaus 4 Testausaseman kuvaus
Tuotannon laitteiden käyttöasteen seuranta
 Tuotannon laitteiden käyttöasteen seuranta Jaakko Yli-Luukko t95586@student.uwasa.fi 19. maaliskuuta 2017 KEY WORDS Internet of Things, esineiden Internet, teollinen Internet, datan visualisointi 1 Tiivistelmä
Tuotannon laitteiden käyttöasteen seuranta Jaakko Yli-Luukko t95586@student.uwasa.fi 19. maaliskuuta 2017 KEY WORDS Internet of Things, esineiden Internet, teollinen Internet, datan visualisointi 1 Tiivistelmä
Tekijä Pitkä matematiikka Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4).
, ( 2,1), (1, 0), (4, 1) ja ( 11, 4).") Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Tekijä Pitkä matematiikka 4 9.12.2016 212 Suoran pisteitä ovat esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4). Vastaus esimerkiksi ( 5, 2), ( 2,1), (1, 0), (4, 1) ja ( 11, 4) 213 Merkitään pistettä
Vaijerivinssi DELTA 160-300 kg / 230V
 Vaijerivinssi DELTA 160-300 kg / 230V Käyttöohje (Mallit: CWS 160,230 ja 300) Maahantuoja Suomessa : Carl Stahl Oy Jonkankatu 2, 20360 Turku Puh: 02 2750060 e mail: myynti@carlstahl.fi 1. Teknisiä tietoja
Vaijerivinssi DELTA 160-300 kg / 230V Käyttöohje (Mallit: CWS 160,230 ja 300) Maahantuoja Suomessa : Carl Stahl Oy Jonkankatu 2, 20360 Turku Puh: 02 2750060 e mail: myynti@carlstahl.fi 1. Teknisiä tietoja
VALTION MAATALOUSKONEIDEN TUTKIMUSLAITOS
 VALTION MAATALOUSKONEIDEN TUTKIMUSLAITOS Postios. Helsinki Rukkila Puh. Helsinki 847812 Rautatieas. Pitäjänmäki Koetusselostus 112 1952 JO-BU-SENIOR polttomoottorisaha Ilmoittaja: Oy Seanpor t A b, Helsinki.
VALTION MAATALOUSKONEIDEN TUTKIMUSLAITOS Postios. Helsinki Rukkila Puh. Helsinki 847812 Rautatieas. Pitäjänmäki Koetusselostus 112 1952 JO-BU-SENIOR polttomoottorisaha Ilmoittaja: Oy Seanpor t A b, Helsinki.
HCT-tyyppiyhdistelmät
 Muistio 1 (9) 17.5.2019 HCT-tyyppiyhdistelmät Tähän muistioon on koottu todellisia esimerkkejä mittamuutoksen mukaisista yhdistelmistä ja autoista. Tammikuussa annettu asetusmuutos mahdollistaa hyvin paljon
Muistio 1 (9) 17.5.2019 HCT-tyyppiyhdistelmät Tähän muistioon on koottu todellisia esimerkkejä mittamuutoksen mukaisista yhdistelmistä ja autoista. Tammikuussa annettu asetusmuutos mahdollistaa hyvin paljon
Tasohyppelypeli. Piirrä grafiikat. Toteuta pelihahmon putoaminen ja alustalle jääminen:
 Tasohyppelypeli 1 Pelissä ohjaat liikkuvaa ja hyppivää hahmoa vaihtelevanmuotoisessa maastossa tavoitteenasi päästä maaliin. Mallipelinä Yhden levelin tasohyppely, tekijänä Antonbury Piirrä grafiikat Pelaajan
Tasohyppelypeli 1 Pelissä ohjaat liikkuvaa ja hyppivää hahmoa vaihtelevanmuotoisessa maastossa tavoitteenasi päästä maaliin. Mallipelinä Yhden levelin tasohyppely, tekijänä Antonbury Piirrä grafiikat Pelaajan
Palautuslaite Boomerang ZHR
 Boomerang palautuslaitteen avulla yksi mies voi käyttää listoituskoneita ja/tai muita koneita ja laitteita puuntyöstössä. Ominaisuudet Arvot Työkappaleen mitat ilman kääntöyks. (mm) Pituus min. 300 max.
Boomerang palautuslaitteen avulla yksi mies voi käyttää listoituskoneita ja/tai muita koneita ja laitteita puuntyöstössä. Ominaisuudet Arvot Työkappaleen mitat ilman kääntöyks. (mm) Pituus min. 300 max.
Futura kuivaimen edut takaavat patentoidut tekniset ratkaisut
 Kuivain Futura Kuivain Futura Eurooppalainen patentti EP nro. 1029211 19 patenttia todistavat laitteen teknisten ratkaisujen omaperäisyyden pistettä ja teknisten ratkaisujen Futura, kansainväliset innovatiivisuuspalkinnot
Kuivain Futura Kuivain Futura Eurooppalainen patentti EP nro. 1029211 19 patenttia todistavat laitteen teknisten ratkaisujen omaperäisyyden pistettä ja teknisten ratkaisujen Futura, kansainväliset innovatiivisuuspalkinnot
ERIKOISKULJETUKSET. 1. Yleistä
 Liite 4 ERIKOISKULJETUKSET 1. Yleistä 1.1. Ulottumamitat ylittävien, ylimassaisten tai -mittaisten kuormien sekä suurkuormausvaunuissa kuljetettavien kuormien (jäljempänä erikoiskuljetusten ja suurkuormausvaunussa
Liite 4 ERIKOISKULJETUKSET 1. Yleistä 1.1. Ulottumamitat ylittävien, ylimassaisten tai -mittaisten kuormien sekä suurkuormausvaunuissa kuljetettavien kuormien (jäljempänä erikoiskuljetusten ja suurkuormausvaunussa
A11-02 Infrapunasuodinautomatiikka kameralle
 A11-02 Infrapunasuodinautomatiikka kameralle Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo Sisällysluettelo 1. Projektityön tavoite
A11-02 Infrapunasuodinautomatiikka kameralle Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo Sisällysluettelo 1. Projektityön tavoite
3 TOISEN ASTEEN POLYNOMIFUNKTIO
 3 TOISEN ASTEEN POLYNOMIFUNKTIO POHDITTAVAA 1. Kuvasta voidaan arvioida, että frisbeegolfkiekko käy noin 9 metrin korkeudella ja se lentää noin 40 metrin päähän. Vastaus: Frisbeegolfkiekko käy n. 9 m:n
3 TOISEN ASTEEN POLYNOMIFUNKTIO POHDITTAVAA 1. Kuvasta voidaan arvioida, että frisbeegolfkiekko käy noin 9 metrin korkeudella ja se lentää noin 40 metrin päähän. Vastaus: Frisbeegolfkiekko käy n. 9 m:n
Miten huolletaan 11/30/09. Aki Suokas
 Miten huolletaan 11/30/09 Aki Suokas Lentokelpoisuuden perusfilosofia uusi ilma-alus käyttöön OPEROINTIA Lentokelpoisuuden hallinta HUOLTO Lentokelpoisuuden tarkastukset "katsastus" myynti pois Lentokelpoisuuden
Miten huolletaan 11/30/09 Aki Suokas Lentokelpoisuuden perusfilosofia uusi ilma-alus käyttöön OPEROINTIA Lentokelpoisuuden hallinta HUOLTO Lentokelpoisuuden tarkastukset "katsastus" myynti pois Lentokelpoisuuden
NAO ROBOTIN PIKAOHJE. Naon purkaminen kuljetuslaatikosta. Mika Lammassaari 2019
 NAO ROBOTIN PIKAOHJE Naon purkaminen kuljetuslaatikosta Nao robotti säilytetään kuljetuslaatikossa, jossa sitä on turvallista liikutella paikasta toiseen. Kun avaat kuljetuslaatikon kannen, huomaat että
NAO ROBOTIN PIKAOHJE Naon purkaminen kuljetuslaatikosta Nao robotti säilytetään kuljetuslaatikossa, jossa sitä on turvallista liikutella paikasta toiseen. Kun avaat kuljetuslaatikon kannen, huomaat että
Asennusohjeet FIX Road system
 Asennusohjeet FIX Road system Ennenkuin aloitat: FIX Road systeemin asennus pitää tehdä kahden henkilön voimin, jotta vaurioilta vältytään ja työn jälki on parempi. Kiskot on asennettava niin ylös kuin
Asennusohjeet FIX Road system Ennenkuin aloitat: FIX Road systeemin asennus pitää tehdä kahden henkilön voimin, jotta vaurioilta vältytään ja työn jälki on parempi. Kiskot on asennettava niin ylös kuin
Apollo SPEEDY Syöttölaite
 Perkkoonkatu 5 Puh. 010 420 72 72 www.keyway.fi 33850 Tampere Fax. 010 420 72 77 palvelu@keyway.fi Apollo SPEEDY Syöttölaite PLC - Ohjaus Askelmoottori Syöttö pituus : 1 12 m Vahva, alumiini rakenne Moottori
Perkkoonkatu 5 Puh. 010 420 72 72 www.keyway.fi 33850 Tampere Fax. 010 420 72 77 palvelu@keyway.fi Apollo SPEEDY Syöttölaite PLC - Ohjaus Askelmoottori Syöttö pituus : 1 12 m Vahva, alumiini rakenne Moottori
Aircraft Maintenance Scheduling with Multi- Objective Simulation- Optimization
 Aircraft Maintenance Scheduling with Multi- Objective Simulation- Optimization 7.5.2011 Ohjaaja: Ville Mattila Valvoja: Raimo Hämäläinen Tausta Ilmavoimilla tärkeä rooli maanpuolustuksessa Rauhan aikana
Aircraft Maintenance Scheduling with Multi- Objective Simulation- Optimization 7.5.2011 Ohjaaja: Ville Mattila Valvoja: Raimo Hämäläinen Tausta Ilmavoimilla tärkeä rooli maanpuolustuksessa Rauhan aikana
DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä
 1 DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä JK 23.10.2007 Johdanto Harrasteroboteissa käytetään useimmiten voimanlähteenä DC-moottoria. Tämä moottorityyppi on monessa suhteessa kätevä
1 DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä JK 23.10.2007 Johdanto Harrasteroboteissa käytetään useimmiten voimanlähteenä DC-moottoria. Tämä moottorityyppi on monessa suhteessa kätevä
SeaDir. Ohjausnäyttö käytettäväksi SeaClear navigointiohjelman yhteydessä. SeaDir 1/6
 SeaDir Ohjausnäyttö käytettäväksi SeaClear navigointiohjelman yhteydessä. SeaDir 1/6 Sisällysluettelo Esipuhe...3 Projektin sivutuote...3 Käyttöönotto...3 SeaClear...3 SeaDir...3 Ohjelma...4 Käynnistys...4
SeaDir Ohjausnäyttö käytettäväksi SeaClear navigointiohjelman yhteydessä. SeaDir 1/6 Sisällysluettelo Esipuhe...3 Projektin sivutuote...3 Käyttöönotto...3 SeaClear...3 SeaDir...3 Ohjelma...4 Käynnistys...4
Ideen bewegen mehr. Tuotevalikoima Kuntoutustekniikka Kuljetustekniikka Lääketieteellinen tekniikka
 Ideen bewegen mehr > Tuotevalikoima Kuntoutustekniikka Kuljetustekniikka Lääketieteellinen tekniikka AAT Alber Antriebstechnik GmbH Ehestetter Weg 11 D-72458 Albstadt, Germany Puh.: +49 74 31 12 95-0 Faksi:
Ideen bewegen mehr > Tuotevalikoima Kuntoutustekniikka Kuljetustekniikka Lääketieteellinen tekniikka AAT Alber Antriebstechnik GmbH Ehestetter Weg 11 D-72458 Albstadt, Germany Puh.: +49 74 31 12 95-0 Faksi:
rajatonta visuaalisuutta SEISMO FACTORY www.seismo.fi www.panoramic-display.com
 rajatonta visuaalisuutta SEISMO FACTORY www.seismo.fi www.panoramic-display.com Isoa, upeaa, sau TÄYTTÄ KUVAA Panoramic on modulaarinen näyttely- ja sisustusratkaisu, jossa rakenteet piiloutuvat täysin
rajatonta visuaalisuutta SEISMO FACTORY www.seismo.fi www.panoramic-display.com Isoa, upeaa, sau TÄYTTÄ KUVAA Panoramic on modulaarinen näyttely- ja sisustusratkaisu, jossa rakenteet piiloutuvat täysin
766323A Mekaniikka, osa 2, kl 2015 Harjoitus 4
 766323A Mekaniikka, osa 2, kl 2015 Harjoitus 4 0. MUISTA: Tenttitehtävä tulevassa päätekokeessa: Fysiikan säilymislait ja symmetria. (Tästä tehtävästä voi saada tentissä kolme ylimääräistä pistettä. Nämä
766323A Mekaniikka, osa 2, kl 2015 Harjoitus 4 0. MUISTA: Tenttitehtävä tulevassa päätekokeessa: Fysiikan säilymislait ja symmetria. (Tästä tehtävästä voi saada tentissä kolme ylimääräistä pistettä. Nämä
Baby-Merc lastenvaunut Käyttöohjeet
 Baby-Merc lastenvaunut Käyttöohjeet Kiitos, että olet valinnut tuotteemme! Olemme varmoja, että tulet olemaan tyytyväinen lastenvaunuihimme. Ennen kuin käytät lastenrattaita, on erittäin suositeltavaa
Baby-Merc lastenvaunut Käyttöohjeet Kiitos, että olet valinnut tuotteemme! Olemme varmoja, että tulet olemaan tyytyväinen lastenvaunuihimme. Ennen kuin käytät lastenrattaita, on erittäin suositeltavaa
Miten piensarjatuotantoon saadaan joustavuutta?
 Miten piensarjatuotantoon saadaan joustavuutta? Jyrki Latokartano, Tampereen teknillinen yliopisto Modernin robottitekniikan mahdollisuudet tuotannossa SeAMK 4.4.2017 kello 12.30-16.00 Miten piensarjatuotantoon
Miten piensarjatuotantoon saadaan joustavuutta? Jyrki Latokartano, Tampereen teknillinen yliopisto Modernin robottitekniikan mahdollisuudet tuotannossa SeAMK 4.4.2017 kello 12.30-16.00 Miten piensarjatuotantoon
Couper EN KÄYTTÖOHJE. Kääntöporttien moottori VALMISTETTU ITALIASSA
 Couper Kääntöporttien moottori EN KÄYTTÖOHJE VALMISTETTU ITALIASSA 1 -KUVAUS 1A -VAROITUKSET Seuraavana lueteltujen ohjeiden laiminlyönti vapauttaa KING Gates srl:n kaikesta vastuusta liittyen ihmisille
Couper Kääntöporttien moottori EN KÄYTTÖOHJE VALMISTETTU ITALIASSA 1 -KUVAUS 1A -VAROITUKSET Seuraavana lueteltujen ohjeiden laiminlyönti vapauttaa KING Gates srl:n kaikesta vastuusta liittyen ihmisille
ELOKUVATYÖKALUN KÄYTTÖ ANIMAATION LEIKKAAMISESSA. Kun aloitetaan uusi projekti, on se ensimmäisenä syytä tallentaa.
 ELOKUVATYÖKALUN KÄYTTÖ ANIMAATION LEIKKAAMISESSA Kun aloitetaan uusi projekti, on se ensimmäisenä syytä tallentaa. Projekti kannattaa tallentaa muutenkin aina sillöin tällöin, jos käy niin ikävästi että
ELOKUVATYÖKALUN KÄYTTÖ ANIMAATION LEIKKAAMISESSA Kun aloitetaan uusi projekti, on se ensimmäisenä syytä tallentaa. Projekti kannattaa tallentaa muutenkin aina sillöin tällöin, jos käy niin ikävästi että
TEKNIIKAN OSA-ALUEITA
 KÄDEN LIIKE KORIPALLON KÄSITTELYSSÄ JA SUORITUKSISSA. On hyvä opettaa heti alusta käsien liike niin pallonkäsittelyyn kuuluvissa kuljetuksessa kuin syötöissä sekä tietysti heitoissa. Periaatteessa käsi
KÄDEN LIIKE KORIPALLON KÄSITTELYSSÄ JA SUORITUKSISSA. On hyvä opettaa heti alusta käsien liike niin pallonkäsittelyyn kuuluvissa kuljetuksessa kuin syötöissä sekä tietysti heitoissa. Periaatteessa käsi
Machine Control Studio - Kuinka päästä alkuun. Ohjelmointiympäristö Unidrive M ja MCi2x0 laitteille
 Machine Control Studio - Kuinka päästä alkuun Ohjelmointiympäristö Unidrive M ja MCi2x0 laitteille Mistä aloittaa? Machine Control Studion lataaminen ja asennus. MCS käynnistys ja uuden projektin luonti.
Machine Control Studio - Kuinka päästä alkuun Ohjelmointiympäristö Unidrive M ja MCi2x0 laitteille Mistä aloittaa? Machine Control Studion lataaminen ja asennus. MCS käynnistys ja uuden projektin luonti.
KUVANKÄSITTELY THE GIMP FOR WINDOWS OHJELMASSA
 KUVANKÄSITTELY THE GIMP FOR WINDOWS OHJELMASSA Ohjeistuksessa käydään läpi kuvan koon ja kuvan kankaan koon muuntaminen esimerkin avulla. Ohjeistus on laadittu auttamaan kuvien muokkaamista kuvakommunikaatiota
KUVANKÄSITTELY THE GIMP FOR WINDOWS OHJELMASSA Ohjeistuksessa käydään läpi kuvan koon ja kuvan kankaan koon muuntaminen esimerkin avulla. Ohjeistus on laadittu auttamaan kuvien muokkaamista kuvakommunikaatiota