AC-servomoottori - rakenne, vikaantuminen ja havainnointimenetelmät.
|
|
|
- Heidi Saarinen
- 9 vuotta sitten
- Katselukertoja:
Transkriptio
1 TUTKIMUSRAPORTTI NRO BTUO vaihe invertteri ACmoottori pyör.nop Jännite Virta Lämpötila Värähtely Monitorointijärjestelmä PC AC-servomoottori - rakenne, vikaantuminen ja havainnointimenetelmät. Tilaaja: Teollisuuden käynnissäpidon prognostiikka VTT TUOTTEET JA TUOTANTO

2
3 2 (32)
4 3 (32) Alkusanat Tämä raportti on laadittu Tekesin, teollisuusyritysten ja VTT:n rahoittamaan projektiin Teollisuuden käynnissäpidon prognostiikka (PROGNOS). Raportti on osa projektin Servo-casea. Kirjoittajat kiittävät projektiin osallistuneita tahoja työtä kohtaan osoitetusta mielenkiinnosta sekä projektille annetusta taloudellisesta ja teknisestä tuesta. Espoo, Elokuussa 2005 Tekijät

5 4 (32) Sisällysluettelo 1 Johdanto 5 2 AC-servomoottorit AC-moottoreiden rakenteet AC-servomoottoreiden rakenteet Vikaantuminen AC-moottorin vikaantuminen Ohjaus- ja säätöjärjestelmän vikaantuminen Havainnointimenetelmät Laakerivaurioiden havainnointimenetelmät Värähtelyanalyysit Voiteluaineanalyysit Lämpökamerakuvaus / lämpötilamittaus ja -analysointi Staattorivaurioiden havainnointimenetelmät Sähköiset analyysit Värähtelyanalyysit Lämpötila Roottorivaurioiden havainnointimenetelmät Sähköiset analyysit Värähtelyanalyysit Yhteenveto 29 Lähdeviitteet 30

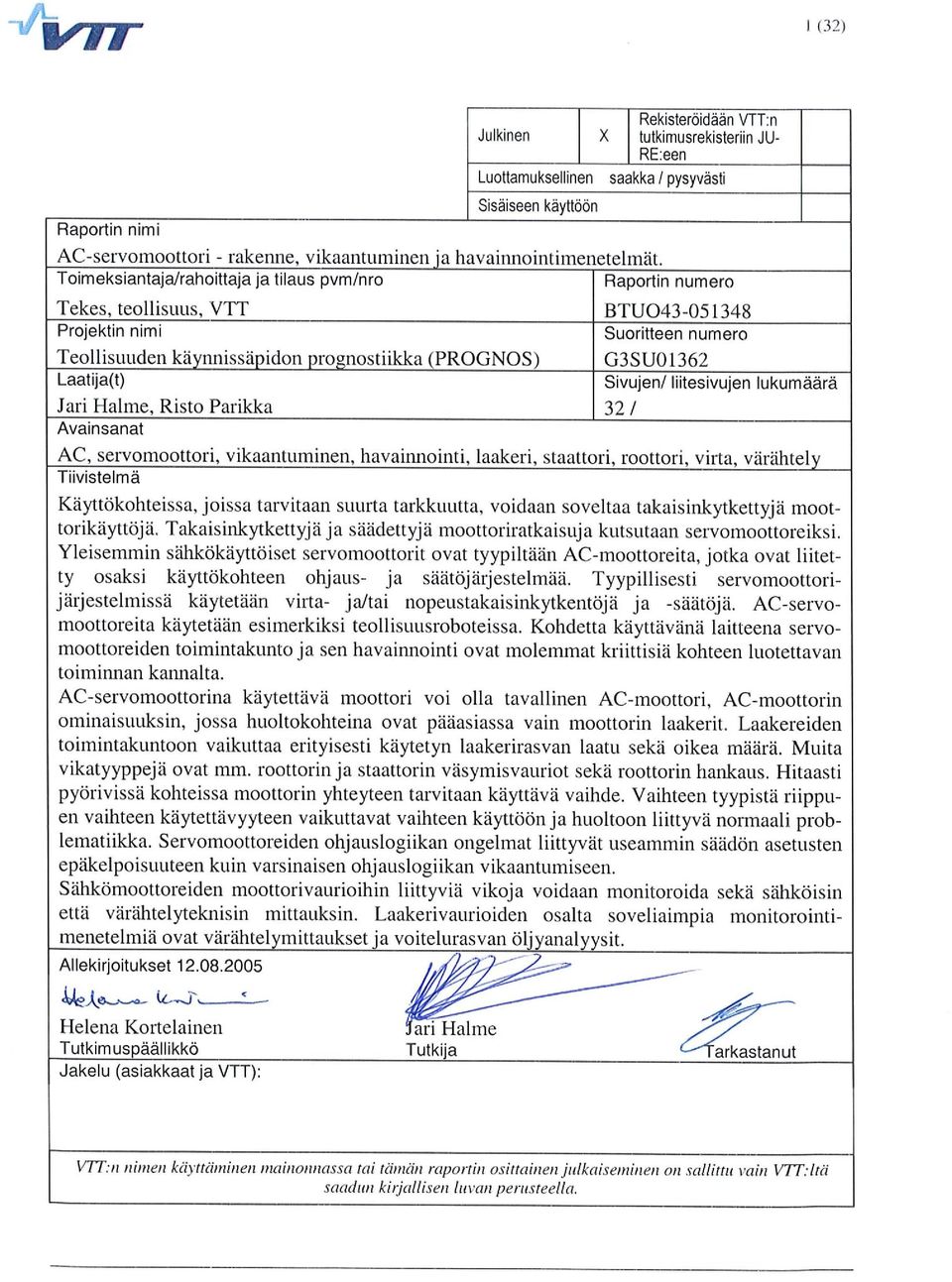
6 5 (32) 1 Johdanto Sähkömoottorit ja -käytöt ovat levinneet useisiin teollisuuden alueisiin ja käyttökohteisiin. Käyttökohteissa, joissa tarvitaan suurta toimintatarkkuutta, voidaan käyttää takaisinkytkettyjä moottorikäyttöjä. Takaisinkytkettyjä ja säädettyjä moottoriratkaisuja kutsutaan servomoottoreiksi. Yleisemmin sähkökäyttöiset servomoottorit ovat tyypiltään ACmoottoreita, jotka on liitetty osaksi käyttökohteen ohjaus- ja säätöjärjestelmää. Tyypillisesti servomoottorijärjestelmissä käytetään virta- ja/tai nopeustakaisinkytkentöjä ja -säätöjä. ACkäyttöisille servomoottoreille on ominaista pieni hitausmomentti sekä suuri vääntömomentti eli hyvä dynamiikka [Airila 2004]. AC-servomoottoreita käytetään esimerkiksi teollisuusroboteissa. Kohdetta käyttävänä laitteena servomoottoreiden toimintakunto ja sen havainnointi ovat molemmat kriittisiä kohteen luotettavan toiminnan kannalta. Tässä raportissa selvitetään ensin servomoottoreiden perustoimintaperiaatteet ja tyypillisimmät vikaantumistyypit sekä käydään läpi erilaisia moottorin toimintakunnon havainnointiin soveltuvia mittaus- ja analyysimenetelmiä. 2 AC-servomoottorit 2.1 AC-moottoreiden rakenteet Epätahtimoottori (oikosulkumoottori) on teollisuuden eri käyttösovelluksissa yleisin voimanlähde (Kuva 1) [Mantere 1986]. Se on edullinen yksinkertaisen rakenteensa ja huoltovapauden vuoksi. Epätahtikoneet ovat aina umpinapakoneita ja ne voivat olla rakenteellisesti joko oikosulkukoneita tai liukurengaskoneita [Muranen 2001]. Oikosulkukoneessa on häkkikäämitys ja liukurengaskoneessa eristetty monivaihekäämitys Kuva 1. Epätahtikone ja sen rakenne [Halcyon Drives 2005]. Kuvassa näkyy moottorin staattori (1), roottori (2), laakeri (3), staattorin runko (4), roottorin akselille suoraan kiinnitetty tuuletin (5), liitinkotelo (6), staattorikäämitys (7) ja roottorikäämitys (8) [Mantere 1986]. Epätahtimoottorin toiminta perustuu staattorikäämitykseen syötettävään kolmivaihevirran synnyttämään koneen staattori- ja roottorikäämityksen välisessä ilmavälissä pyörivään

7 6 (32) magneettikenttään. Magneettikentän pyörimisnopeus (tahtinopeus) on syötettävän taajuuden ja koneen S- ja N-napojen muodostamien napaperien lukumäärän suhde [Mantere 1986]. Syntyvä pyörivä magneettikenttä indusoi roottorikäämitykseen jännitteen. Oikosuljetussa käämityksessä jännite synnyttää roottorikäämitykseen virran, joka aiheuttaa staattorin käämitykselle vastakkaisen magneettikentän [Muranen 2001]. Magneettikenttien välillä vallitsevan voimavaikutuksen vuoksi roottoriin vaikuttaa voima, joka kiihdyttää roottorin magneettikentän nopeutta pienemmälle pyörimisnopeudelle. Roottorin pyörimisnopeuden ja tahtinopeuden välisen erotuksen suhdetta tahtinopeuteen kutsutaan jättämäksi. Pyörimisnopeuden ja tahtinopeuden erosta johtuu nimitys epätahtikone. Epätahtikonetta kuormitettaessa pyörimisnopeus pienenee eli jättämä kasvaa. Epätahtimoottorin pyörimisnopeus on f roottori ( s) = 1 f verkko p (1) missä s on jättämän taajuus, f verkko on syötettävä verkkotaajuus ja p moottorin napaparien lukumäärä. Epätahtikoneen haittapuolena on tehokertoimen jääminen alle yhteen (tyypillisesti ), mikä johtuu siitä, että roottorin magnetointivirta joudutaan syöttämään staattorin kautta [Muranen 2001]. Roottorin virtaa ei oikosulkumoottoreissa pystytä mittaamaan, mikä vaikeuttaa säätöä huomattavasti. Tahtimoottorin (synkronimoottori) staattorissa on samanlainen kolmivaihekäämitys kuin epätahtikoneissa. Tahtikoneen roottorissa on magnetointikäämitys, johon syötetään tasavirtaa harjojen ja liukurenkaiden välityksellä tai roottorin magneettinavat on muodostettu kestomagneeteilla [Mantere 1986]. Sinällään tahtimoottorin toimintaperiaate on samanlainen kuin epätahtimoottoreissa. Verkkoon kytketty tahtikone pyörii tahtinopeudella, mistä konetyypin nimitys on peräisin. Tahtimoottorin tehokerrointa voidaan muuttaa vapaasti magnetointia säätämällä. Ylimagnetoituna tahtimoottori toimii kondensaattorin tavoin eli tuottaa loistehoa ja alimagnetoituna induktanssin tavoin [Muranen 2001]. Tahtimoottorin etuna on mahdollisuus epätahtimoottoria tarkempaan pyörimisnopeuden säätämiseen. 2.2 AC-servomoottoreiden rakenteet Servomoottoreita on saatavilla sekä AC- että DC-moottoreina. Vanhemmat servomoottorit olivat yleisemmin tyypiltään DC-moottoreita, koska virransäätö oli mahdollista vain SRC:n kautta (Silicon-Controlled Rectifier), joka toimii diodi-porttina. Transistoreiden kehittyessä suurempien ja korkeataajuisempien virtojen säätöön soveltuvaksi AC-servo -tekniikka on sittemmin yleistynyt. Vaihtovirtaservomoottori voi perustua joko tahti- tai epätahtimoottorikäyttöön [Mantere 1986]. Tahtimoottoreissa roottorin magneettikenttä synnytetään kestomagneettien avulla. Rakenteeltaan ratkaisu vastaa harjatonta DCservokäyttöä. Epätahtimoottoreissa (asynkronimoottori) roottorin jättämän ansiosta syntymä vaihteleva magneettivuo aiheuttaa roottorin oikosulkutangoissa virran ja halutun magneettikentän. Epätahtimoottorirakenne poistaa kestomagneeteista johtuvan maksimitehorajoituksen, mutta edellyttää tarkkaa roottorin kulma-asennon mittaamista (tyypillisesti 2500 pulssia/kierros). Tarkka mitattu asematieto voidaan hyödyntää moottorin
![Oikosuljetussa käämityksessä jännite synnyttää roottorikäämitykseen virran, joka aiheuttaa staattorin käämitykselle vastakkaisen magneettikentän [Muranen 2001].](/docs-images/47/3149346/images/page_7.jpg "Magneettikenttien välillä vallitsevan voimavaikutuksen vuoksi roottoriin vaikuttaa voima, joka kiihdyttää roottorin magneettikentän nopeutta pienemmälle pyörimisnopeudelle.")
8 7 (32) aseman ja nopeuden liikkeenohjauksessa. Epätahtimoottoreilla tarkka liikkeenohjaus edellyttää jonkin verran monimutkaisempaa ohjausta kuin kestomagneetteja käytettäessä. Varhemmin servomoottorit oli suoraan suunniteltu servokäyttöön. Nykyään servokäytöissä käytettäviä moottoreita voidaan sovelluksesta riippuen käyttää joko servovahvistimeen tai vaihtelevataajuiseen ohjaimeen kytkettynä. Servo-termin käyttö riippuu sovelluksesta ja joskus jopa valmistajayrityksestä. Joissakin yrityksissä moottoreita, jotka eivät ole askelmoottoreita, mutta ovat takaisinkytkettyjä, kutsutaan servomoottoreiksi. Tällöin tavallista AC-induktiomoottoria, joka on takaisinkytketty, voidaan nimittää servomoottoriksi [Kissell 2004]. AC-servomoottori koostuu tyypillisesti kolmivaihemoottorista, tarkasta takaisinkytkentäanturista, taajuusmuuntajasta sekä itse ohjaus- ja säätöyksiköstä/logiikasta (Kuva 2). Itse AC-moottori on rakenteeltaan hyvin pitkälle samanlainen kuin tavallinen oikosulkumoottori. Tiettyjä rakenteellisia eroja moottoreissa on ja nämä liittyvät tyypillisesti ominaisuuksiin, joita servokäytön luonteesta johtuen on jouduttu räätälöimään moottorille ja/tai sen yhteyteen. Servomoottorit on suunniteltu toimimaan ylikuumenematta laajalla nopeusalueella sekä ylläpitämään nollanopeudella riittävän suuri momentti kuorman paikallaan pitämisen varmistamiseksi. Lisäksi servomoottorit voivat joutua operoimaan kuormitettuna pitkiä aikoja alhaisella nopeudella. Varhemmissa moottoreissa moottorin tuuletin oli kytketty suoraan moottorin akselille, jolloin hitaissa nopeuksissa ilmajäähdytys ei ollut aina riittävä. Uudemman mallisissa moottoreissa tuuletin on erillinen ja sähkökäyttöinen, ei suoraan akselille kytketty, jolloin jäähdytysilmakierto voidaan optimoida paremmin erilaisissa käyttötilanteissa. Liiketilan säädin Virtasäädin Modulointi Taajuusmuuttaja Moottori Anturit + - PID AC-moottorin virtasäätöpiiri PWM 3-vaihe invertteri ACmoottori pos. nop. Kuva 2 Liiketila- ja virtasäädetyn AC-servomoottorin lohkokaavio [Murray 2004]. Servomoottoreissa käytetään tyypillisesti kestomagnetoituja, hiiliharjattomia moottoreita (Kuva 3). Moottorin käämitykselle syötettävä jännite on AC-moottorilla luonnollisesti ACmuotoinen. Hiiliharjaton kommunikointi on toteutettu sähköisesti, kytkemällä sopivasti vaiheistamalla moottorin vaiheisiin liitetyt transistorit päälle ja päältä [Kissell 2004]. Servomoottoreille voidaan sovelluskohteesta ja -tarpeesta riippuen integroida vaihde esim. suurehkojen massojen joutuisaan liikutteluun. Lisäksi moottorin koteloon on integroitu servokäytössä tarvittava takaisinkytkentäanturi. Takaisinkytkentäanturit voivat olla tyypiltään mm. pulssiantureita (inkrementaalinen tai absoluuttinen), resolvereita tai takometrejä (AC tai DC) [Kissell 2004]. Anturitiedon perusteella tiedetään moottoriakselin mitattu asema ja/tai nopeus.

9 8 (32) Staattorin runko Kestomagnetoitu roottori Staattorin käämitys Enkooderi (takaisinkytkentäanturi Akselin tiiviste Laakeri Laakeri Suora kytkentä Kuva 3. Tyypillinen kestomagnetoitu servomoottori [Kissell 2004]. Servoissa käytetään säätö- ja ohjausjärjestelmiä moottorille asetetun ohjaustavoitteen ja moottorilta mitatun tiedon sovittamiseksi. Käytettävissä olevia säätöratkaisuja on paljon, roboteista pesukoneisiin. Vanhemmat säätöjärjestelmät pohjautuivat analogisiin ratkaisuihin. Nykyään toteutettavat ratkaisut ovat pääasiassa prosessoripohjaisia ja digitaalisia, jolloin järjestelmien uudelleenasettaminen ja sovittaminen onnistuvat vaivattomammin kuin analogisissa ratkaisuissa. Tyypillisesti AC-servomoottorilla on kaksi peräkkäistä säätöpiiriä (Kuva 2), joista ulompi säätöpiiri säätää moottorin asemaa ja nopeutta moottorin asema- tai nopeustakaisinkytkentäanturin mittaustiedon perusteella. Ulomman piirin säätimen ulostulona saadaan päivitetty ohjearvo moottorin vääntömomentin pienentämiseksi tai kasvattamiseksi. Nopeussäätimen päivitetty ohjearvo syötetään moottorin sisemmälle, virtasäätöpiirille. Virtasäätöpiiri tuottaa ensin jännitesignaalit tehomuuntimelle (PWM, Pulse-width Modulated) ja taajuusmuuntajalle, joka tuottaa moottorin tarvitsemat virtasignaalit halutun vääntömomentin tuottamiseksi. Valitun algoritmin mukaisesti mikroprosessorilla lasketaan PWM:lle tulevista jännitesignaaleista kuusi, kolmivaihe-taajuusmuuttajalle menevää pulssimuotoista signaalien kytkentäjaksoja nopeasti varioivaa ohjaussignaalia [Murray 2004, Forselius et al. 1998]. Taajuusmuuttajan ulostulo on kytketty servomoottorin staattorin käämeille (Kuva 4). PWM:n laskennasta tulevien ohjauspulssien mukaisesti taajuusmuuttajan tehopuolijohteet kytkeytyvät päälle ja pois päältä. Taajuusmuuttajan tehopuolijohteiden ja moottorin staattorin keskinäisestä kytkennästä syntetisoituu moottorille sinimuotoinen, moottoria käyttävä kolmi-vaiheinen AC-signaali (Kuva 4) [Burroughs 2004,TTY/TEL 2005].

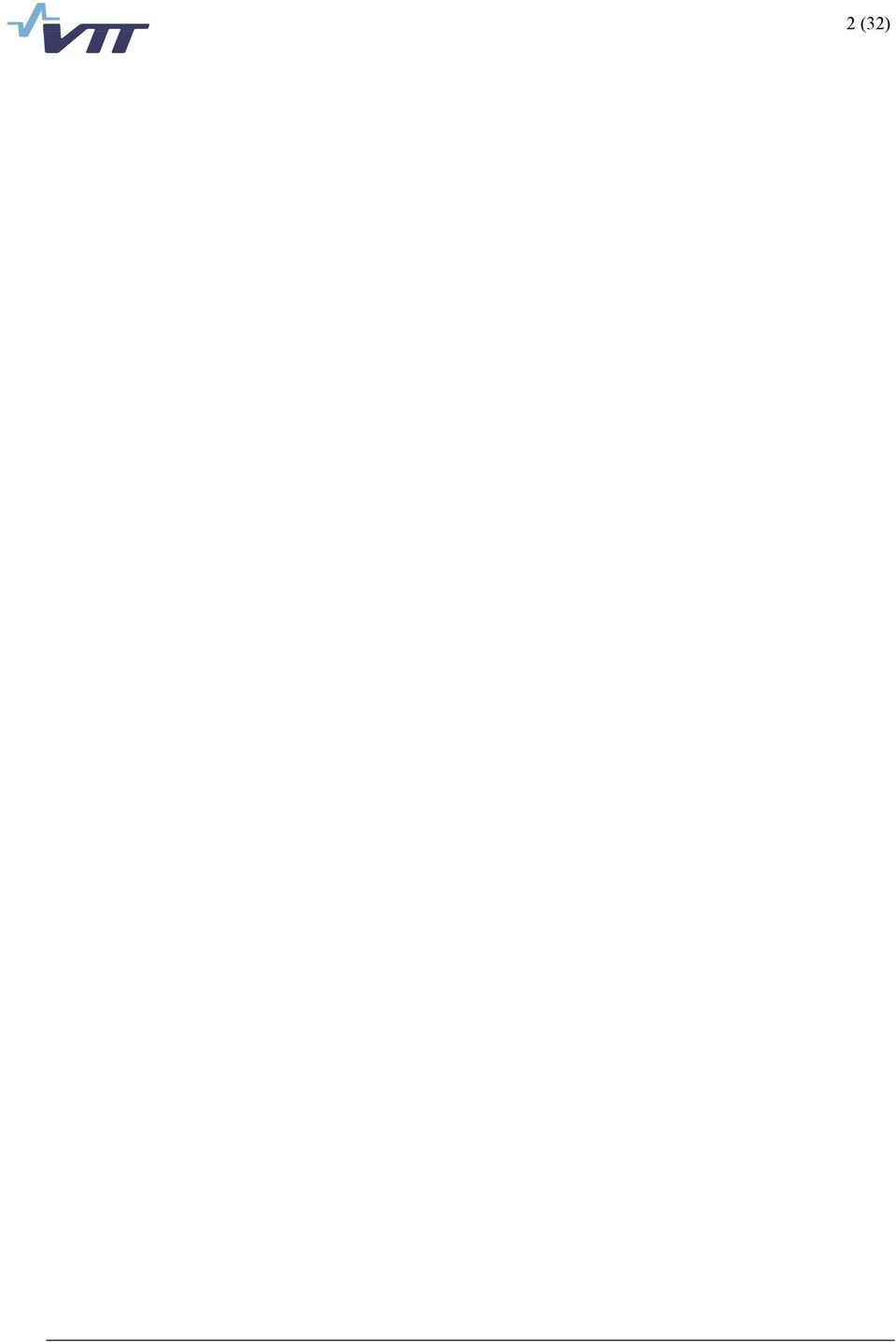
10 9 (32) Staattorin käämitys ja roottori Kuva 4 PWM:n ohjauspulssien käyttämän kolmivaihe-taajuusmuuttajan (ylhäällä vasemmalla) kytkentä AC-moottorille (ylhäällä oikealla) [Burroughs 2004]sekä halutun vaihejännitteen Uv muodostuminen PWM-tekniikkalla.(alhaalla) [TTY/TEL 2005]. 2.3 Vikaantuminen AC-moottorin vikaantuminen Sähkömoottorit ovat sähkömekaanisia laitteita, joiden vikaantuminen voi johtua sähköisistä, mekaanisista ja muista, ulkoisista syistä. Lähteissä Kazzaz et al [2003] ja Singh et al. [2003] on esitelty erilaisia sähkömoottorin vikaantumismekanismeja kuvaava kaavio (Kuva 5). Mekaanisia moottorin roottorivikoja ovat mm. roottorin dynaaminen ja/tai staattinen epäkeskisyys sekä linjausvirhe. Staattorin mekaanisia päävikatyyppejä ovat staattorin epäkeskisyys sekä löysä ydin. Laakerivaurio on moottorin tyypillinen mekaaninen vika ja saattaa synnyttää moottorille myös epäkeskisyyttä. Muut moottorin mekaaniset vikatyypit ovat seurausta edellä mainituista vikatyypeistä. Muita vikatyyppejä ovat mm. roottorin ja staattorin väsymisvauriot sekä roottorin hankaus [Singh et al. 2003]. Lisäksi jos moottorille on integroitu vaihde ja/tai tuuletin (esim. servomoottorit), vaihde- tai tuuletinvaurio on yksi moottoriliitännäisistä mekaanista vauriotyypeistä [Nandi et al. 1999]. Sähköisiä vikoja moottorilla aiheuttavat käämityksestä johtuvat kierros-, vaihe- tai maaoikosulkutilanteet. Roottorilla sähköisiä vaurioita voi syntyä roottoritankojen halkeamista tai tankojen löysästä kiinnityksestä. Roottorilaminaattien läpi tapahtuva oikosulku on tyypillinen sähköinen vikatyyppi. Lisäksi taajuusmuuttajakäytössä voi syntyä akselijännitteitä ja -virtoja, jotka voivat aiheuttaa lähinnä laakereiden vaurioitumista. Laakerivirran syntymistä voidaan estää asentamalla eristys, joka katkaisee virtapiirin ja ehkäisee laakerin kautta kulkevan, akselijännitteen vaikutuksesta syntyvän akselivirran syntymisen.
. Mekaanisia moottorin roottorivikoja ovat mm.")
11 10 (32) SÄHKÖMOOTTORIN VIKALÄHTEET SISÄISET ULKOISET Mekaaniset Sähköiset Sähköiset Ympäristö Mekaaniset Käämin ja laminoinnin liikkeet Laakerivauriot Roottoriiskut Epäkeskisyys Dielektrisyysvirhe Roottoritankohalkeamat Magneettipiirin virheet Kosteus Puhtaus Transienttijännite Jänniteheilahtelut Jännitehäiriö Lämpötila Sykkivä kuormitus Ylikuorma Väärä asennus Kuva 5 Oikosulkumoottorin sisäiset ja ulkoiset vikalähteet [Singh et al & Kazzaz et al. 2003]. Lähteessä Singh et al. [2003] on koottu yhteen erilaisia induktiomoottoreille laadittuja tilastoaineistoon perustuvia katsauksia tyypillisimmistä moottoreiden vikaantumissyistä. Esitettyjen EPRI:n, IEEE:n ja B&K:n katsauksien perusteella laakerivauriot ovat suurin yksittäinen vikaantumissyy sähkömoottoreilla. Yli 40 % vioista aiheutuu laakereista. Seuraavina tulevat staattorivauriot (yli 25 %) ja roottorivauriot (yli 5 %). Muut vauriot aiheuttavat selvityksestä riippuen yhteensä noin % sähkömoottoreiden vaurioista. Moottorin sisäiset viat voidaan jakaa vikojen alkuperän ja syntypaikan mukaisesti roottorille ja staattorille kuuluvaksi. Esimerkiksi laakeri ja tuuletinvauriot liittyvät pyörimisluonteensa mukaisesti roottorivaurioihin. Alla olevissa taulukoissa (Taulukko 1 ja Taulukko 2) on esitetty moottorin roottorille ja staattorille jaotellut vikatyypit sekä näiden syyt.
![sisäiset ja ulkoiset vikalähteet [Singh et al. 2003 & Kazzaz et al. 2003]. Lähteessä Singh et al.](/docs-images/47/3149346/images/page_11.jpg "[2003] on koottu yhteen erilaisia induktiomoottoreille laadittuja tilastoaineistoon perustuvia katsauksia tyypillisimmistä moottoreiden vikaantumissyistä.")
12 11 (32) Taulukko 1. Sähkömoottorin roottorivauriotyypit ja niiden syyt [Kazzaz 2003]. Roottoreihin liittyvät vauriot Vikatyyppi Laakerivika Rikkoutunut roottoritanko Roottorirungon vauriot Vian mahdollinen aiheuttaja Puutteellinen eristys, virheellinen kuormitus, magneettisen voiman epäsuhteellisuus, ylikuumeneminen, puutteellinen voitelu, likainen voiteluaine Lämpösyklit, magneettisen voiman epäsuhteellisuus, suuret transsienttiset liikkeet, negatiivinen syöttösykli Virheellinen roottorin liike tai valmistus, lämpösyklit, ylikuormat Laakereiden linjausvirhe Puutteellinen tai väärä kytkentä, suuret laakerivälykset, ylikuormat, virheellinen asennus Roottoreiden linjausvirhe Virheellinen asennus, laakerivaurio, magneettisen voiman epäsuhteellisuus Laakerin puutteellinen voitelu Ylikuumeneminen, tiivistevauriot, likainen voiteluaine Roottorin mekaaninen tai lämpötekninen epätasapaino Päätyrenkaan liike, epäsymmetrinen "Blocking" Taulukko 2. Sähkömoottorin staattorivauriotyypit ja niiden syyt [Kazzaz 2003]. Staattoreihin liittyvät vauriot Vikatyyppi Runkovärähtelyt Staattorin maavirheet Eristevaurio Vian mahdollinen aiheuttaja Magneettisen voiman epäsuhteellisuus, käämin liikkuminen urassa, syöttöjännittehäiriöt, ylikuormitus, virheellinen eristys, roottori-iskut Runko-oikosulku, eristehankauma, lämpösyklit, puutteellinen laminointi, höllät urakiilat, sähköshokki Huollon tai asennuksen aikainen vaurio, liialliset käynnistykset, korkea tai matala ilmankosteus ja lämpötila Staattorin kierrosoikosulku Liiallinen lämpeneminen, äkillisesti nouseva syöttö, korkea kosteuspitoisuus, värähtelyt, epäpuhtaudet voitelusta Staattorin vaiheoikosulku Eristevaurio, korkea lämpötila, syöttöjännitehäiriöt, käämien löysä kiinnitys Johteen siirtymä Virheistä johtuvat shokkikuormitukset, toistuvat käynnistykset, käämien päiden värähtely Sähköiset kytkentävauriot Höllät liitokset, epäpuhtaudet, liiallinen värähtely Ohjaus- ja säätöjärjestelmän vikaantuminen Tässä yhteydessä ohjaus ja säätöjärjestelmään katsotaan kuuluvaksi kokonaisuudet, jotka eivät ole elimellisesti osana AC-moottoria. Servomoottorilla moottorin ulkopuolisia osia ovat takaisinkytkentäanturit, taajuusmuuttaja sekä itse ohjaus- ja säätöyksikkö ja/tai -logiikka ja ne koostuvat elektroniikka- ja prosessoripiireistä. Näihin liittyville osakokonaisuuksille ja komponenteille ja antureille on määritelty valmistajien toimesta toimintaan liittyvät suositeltavat käyttöolosuhteet. Toimittaessa suositusten mukaisesti sähköisten komponenttien ja antureiden toiminta on yleensä luotettavaa. Toimintaympäristössä esiintyvät häiriöt ja suositusten ylittävät muutokset saattavat aiheuttaa järjestelmävikojen esiintymistiheyden

13 12 (32) kasvun sekä käyttövarmuuden huononemisen. Esimerkiksi elektroniikan IC-piirien ja - liitosten suunniteltu käyttölämpötila-alue on noin C. Alueen ulkopuolella piirin toimintaa ei voida taata. Lämpötila vaikuttaa myös IC-piirien kestoikään, jolloin kriittisellä alueella operoitaessa esimerkiksi +10 C:n nousu voi laskea piirin käyttöikää huomattavasti. Ohjaus- ja säätöjärjestelmään kuuluvien elektroniikkapiirien ja antureiden vikaantumisen aiheuttajat voidaan jakaa kolmeen, ilmastollisista syistä, mekaanisista tekijöistä sekä sähköisistä häiriöistä johtuvaan vikaantumisryhmään (Taulukko 3) [Kuoppala et al ja Wallin 1995]. Taulukko 3. Elektroniikkapiirien ja antureiden mahdolliset häiriö- ja vikaantumissyyt [Kuoppala et al ja Wallin 1995]. Elektroniikan ja antureiden häiriölähteet Ryhmä Tekijät Ilmastolliset Ilman lämpötila ja kosteus, kaste, kondensaatio ja kastuminen, roiske- ja tippuvesi, upotus veteen, lumi jää ja huurre, tuuli ja ilmanvirtaus, ilmanpaine, auringon- ja lämpösäteily, öljysumu, korrosoiva lika, pöly, hiekka ja liuokset, kasvit, sienet ja eläimet Mekaaniset Sähköiset Värähtely, iskut, kiihtyvyys, akustinen melu, hankaus ja eroosio Generaattoreista, tehokomponenteista, sytytystulpista, hitsauslaitteista, radiolähettimistä, tutkista, kännyköistä, termojännisteistä tai johtimien kapasitanssivaihteluista signaalijohtimiin indusoituneet jatkuvat tai satunnaiset piikit, pulssit ja häiriöt Ohjaus- ja säätölogiikan luotettavuuteen ja vikaantumiseen vaikuttavat pääosin samat tekijät kuin antureilla ja elektroniikkapiireillä. Suuri osa logiikkavikaan liitetyistä vioista ilmenee logiikan ulkopuolisissa laitteissa, esimerkiksi toimilaitteissa, mekaanisessa rakenteessa tai antureissa. Antureiden tuntopintojen likaantuminen ja paikaltaan pois siirtyminen ovat tyypillisiä virhesignaalien aiheuttajia. Logiikkavioista vain noin 5 % on logiikan sisäisistä syistä johtuvia (Taulukko 4) [Fonselius et al. 1999]. Taulukko 4. Logiikkavikaosuuksien jakautuminen sisäisistä ja ulkoisista syistä johtuviin vikalähteisiin [Forselius et al. 1999]. Automaatiojärjestelmän vikaantuminen Ryhmä ja pääkohde Alikohteet Osuus % Sisäiset Keskusyksikkö Keskusyksikkö Ohjelmamuisti Väylät Virtalähde Tulot ja lähdöt 4.5 Ulkoiset 95 Yhteensä Havainnointimenetelmät AC-servomoottoreihin liittyvien erilaisten vikojen ja vaurioiden havainnointiin ja tunnistamiseen voidaan käyttää useita, erilaisiin mittausmenetelmiin perustuvia suoria tai

14 13 (32) epäsuoria, eri tekniikoihin ja tieteen aloihin liittyviä mittaus- ja havainnointimenetelmiä ja - ratkaisuja. Erilaisia tunnistusmenetelmiä ovat mm. seuraavat [Nandi S., 1999]: Lämpötilamittaukset Sähkömagneettisen kentän monitorointi, havainnointi ja paikannuskelat (akselivuo) Radiotaajuusemissioiden monitorointi Värähtelyn ja äänen monitorointi Akustisen emission monitorointi Kemialliset analyysit Rasva-analyysit Moottorivirtojen sormenjälkianalyysit Asiantuntijamalli-, neuroverkko-, sumeat menetelmät ja niiden yhdistelmät Erilaisten havainnointimenetelmien soveltamisessa toimintaresurssit kannattaa keskittää ensin moottorien tyypillisimpien ja taloudellisesti vaikuttavimpien vikojen, vikatilanteiden ja vaurioiden havainnointiin soveltuviin menetelmiin. Sähkömoottorin toimintakuntoa ja sen muutoksia havainnoivaan mittausjärjestelmään voi kuulua moottorin vaiheiden jännite- ja virtamittaukset sekä lämpötila- ja värähtelymittaukset (Kuva 6) [Kazzaz 2003]. Järjestelmän mittausvasteiden ja/tai ohjausjärjestelmäsuureista saatavien vasteiden avulla voidaan päätellä moottorin toimintatila ja -kunto sekä osa ohjaus- ja säätöjärjestelmän häiriöistä tai puutteista. Servokäytössä haasteena ovat usein nopeasti muuttuvat moottorin pyörimisnopeudet sekä invertteriltä tulevat nopeat ohjauspulssit. Ensin mainittu aiheuttaa sen, että esimerkiksi värähtelyanalyysiin perustuvat ratkaisut joudutaan liipaisemaan työsekvenssin mukaisesti samasta pyörimisnopeudesta (ja kuormitustilanteesta) paremman vertailukelpoisuuden tuottamiseksi. Invertterikäytöstä tulevat nopeat ohjaussignaalit herättävät moottorilla todellista värähtelykohinaa, joka jakautuu laajalle taajuuskaistalle ja saattaa peittää alleen todellisista vikaantumisista heränneitä ilmiöitä. Keskiarvoistamalla mittaussignaalia voidaan vaimentaa satunnaisten häiriövärähtelyiden synnyttämää vaikutusta värähtelymittaustuloksiin. AC-moottorin virtasäätöpiiri PWM 3-vaihe invertteri ACmoottori pyör.nop Jännite Virta Lämpötila Värähtely Monitorointijärjestelmä Kuva 6. Sähkömoottorin skemaattinen mittaus- ja monitorointijärjestelmä [Kazzaz 2003]. PC Laakerivaurioiden havainnointimenetelmät Värähtelyanalyysit Värähtelymittauksilla tarkoitetaan siirtymän, nopeuden, kiihtyvyyden mittaamista kohteen pinnasta tai sen läheltä yleensä taajuusalueilla 0-20 khz. Ilmassa etenevien

15 14 (32) painevaihteluiden mittauksilla tarkoitetaan äänen mittausta kuuloalueella. Korkeampitaajuisten värähtelyjen mittaamisessa käytetään joko akustista emissiota (rakennevärähtelyt) tai ultraääntä (ilman painevaihtelut). Viallinen vierintälaakeri tuottaa värähtelyjä taajuuksilla, jotka ovat luokiteltavissa tyypiltään neljään eri kategoriaan. Nämä ovat satunnainen värähtely ultraäänialueella, laakerin osien värähtelyt näiden ominaistaajuuksilla, laakerin ulko- ja sisäkehän sekä vierintäelinten ja pitimen vauriotaajuudet, sekä summautuneet ja moduloituneet värähtelyt [Berry 1991]. Aikatason analyysit Anturilta saatava signaali esittää kohteen värähtelyamplitudin aikatasossa. Tämän aikasarjan tarkastelu sellaisenaan antaa tietoa kohteen kunnosta [Mikkonen 1995]. Aikatason nopeus- tai kiihtyvyyssignaalista voidaan seurata värähtelyn huippuarvoja tai tehollisarvoja. Nopeuden tehollisarvosta käytetään standardissa PSK 5701 [PSK 1990] nimitystä tärinärasitus ja sitä mitataan tavallisimmin taajuusalueella Hz [Kerkkänen & Kuoppala 1996]. PSK 5704 standardi [PSK 1996] antaa tärinärasitusrajat koneiden vastaanottotarkastusta varten. Edellä mainitut standardit koskevat koneita, joiden pyörimisnopeudet ovat /min. Kiihtyvyyden huippuarvon kasvu on usein merkkinä laakerivauriosta. Huippuarvo on kuitenkin hyvin herkkä häiriöille ja käytetty taajuusalue vaikuttaa huomattavasti tehollis- ja huippuarvon mittauksiin [Mikkonen 1995]. Aikatason signaalia voidaan keskiarvoistaa häiriöiden poistamiseksi. Signaalista otetaan tällöin useita näytteitä, jotka tahdistetaan tarkasti pyörimisnopeuden mukaan. Satunnaiset huippuarvot keskiarvoistuvat pois signaalista ja jäljelle jäävät pyörimisnopeuden mukaan esiintyvät huiput. Laakerien osien tyypilliset vauriotaajuudet eivät ole pyörimisnopeuden kokonaislukumonikertoja, joten tahdistettu aikakeskiarvomittaus ei ole eduksi laakerien kunnonvalvonnassa. Mittausta käytetään pyörivien telojen vikojen ja epätasapainon tunnistamiseen [Rautiainen et al. 1999]. Aikatason värähtelysignaalista, kuten mistä tahansa lukusarjasta, voidaan laskea erilaisia tilastollisia tunnuslukuja. Näitä ovat esimerkiksi keskiarvot, keskihajonnat, kurtosis, crest factor eli huippukerroin ja erilaiset korrelaatiot. Kurtosiksen mittaaminen perustuu siihen oletukseen, että ehjästä laakerista tuleva värähtely on satunnaisvärähtelyä, joka noudattaa Gaussin jakaumaa. Kurtosis-arvo kasvaa värähtelyn piikikkyyden kasvaessa. Kurtosis-arvon kasvaminen lyhyessä ajassa voi paljastaa laakerin alkavan vikaantumisen. Crest factor on signaalin huippuarvon suhde tehollisarvoon. Korrelaatiomittauksia ovat autokorrelaatio, ristikorrelaatio ja ristispektri. Autokorrelaatiomittauksilla helpotetaan aikatasosignaalissa esiintyvän säännönmukaisuuden havaitsemista [Mikkonen 1995]. Alla olevassa kuvassa (Kuva 7) on esitetty esimerkki aikatason tunnusluvun trendiseurannasta. Kuvan tapauksessa vierintälaakerin vaurioituminen havaittiin värähtelykiihtyvyyden huippuarvon kohoamisesta. Aikaa alkavan vaurion havaitsemisesta laakerin lopulliseen hajoamiseen kului noin seitsemän tuntia. Esimerkki on peräisin vierintälaakerikoelaitteella suoritetusta rasituskokeesta, jossa laakeri ajettiin vaurioon saakka kiihdytettynä testauksena. Häiriöttömässä koetilanteessa vaurio pystyttiin havaitsemaan laajan taajuuskaistan (0-10 khz) värähtelytasoa seuraamalla [Parikka et al. 2002]. Halme [2002] on esittänyt myös vastaavia tuloksia.

16 15 (32) Huippuarvo 0-10 khz Kuva 7. Värähtelyn kiihtyvyyden huippuarvo (taajuuskaista 0-10 khz) laakerirasituskokeen loppuvaiheesta [Parikka et al. 2002]. Taajuustason analyysit Kunnonvalvonnassa käytetään yleisesti spektrianalyysiä. Spektri esittää signaalin amplitudin taajuuden funktiona, jolloin päästään tarkastelemaan signaalin sisältämiä taajuuskomponentteja. Spektri lasketaan aikatason signaalista Fourier-muunnoksen avulla [Rao 1996]. Vierintälaakerin tuottamat värähtelyt luokiteltiin lähteessä [Berry 1991] neljään eri tyyppiin: satunnainen värähtely ultraäänialueella, laakerin osien värähtelyt näiden ominaistaajuuksilla, laakerin ulko- ja sisäkehän sekä vierintäelinten ja pitimen vauriotaajuudet, sekä summautuneet ja moduloituneet värähtelyt. Laakerilta mitatun värähtelyn taajuudessa on aina havaittavissa pyörimisnopeuden taajuus riippumatta tasapainotuksen tai linjauksen onnistumisesta, mutta jonkin osan vauriotaajuuden näkyminen värähtelyspektrissä on merkki jonkin asteisesta laakerivauriosta [Berry 1991]. Laakerin ulkokehän ja sisäkehän, vierintäelinten ja vierintäelinten pitimen vauriotaajuuksien laskemiseksi on olemassa yhtälöt, joita on julkaistu useimmissa vierintälaakereita käsittelevissä lähteissä, sekä laakerivalmistajien tuoteluetteloissa. Yhtälöt on esitetty kuvassa (Kuva 8), joka on lähteestä [Knowpap 2000]. Laakerivalmistajat taulukoivat ja julkaisevat näillä yhtälöillä laskettuja laakeriensa vauriotaajuuksia. Tällainen vauriotaajuustaulukko voi olla osa värähtelymittausten analysointiin käytettävää tietokoneohjelmaa.

17 16 (32) Kuva 8. Vierintälaakerin osien vauriotaajuuksien laskenta [Knowpap 2000]. Vierintälaakerin vauriotaajuudet ovat pyörimisnopeuden reaalilukumonikertoja, eivätkä kokonaislukumonikertoja. Jotta vauriotaajuus voitaisiin tunnistaa spektristä, on tiedettävä oikea pyörimisnopeus [Al-Najjar 2000]. Vauriotaajuuksien amplitudeille ei ole olemassa mitään yksiselitteisiä sallittuja arvoja, koska amplitudit riippuvat huomattavan paljon koneesta, laakerin ja anturin asennustavasta ja vauriomekanismista. Berryn [1991] mukaan vaurion vakavuutta voidaan arvioida esiintyvien vauriotaajuuksien harmonisten monikertojen määrästä. Jos monikertoja on useita ja näillä esiintyy sivunauhoja pyörimisnopeuden tai muiden vauriotaajuuksien etäisyydellä, on laakerin mahdollisimman nopea uusiminen suositeltavaa [Berry 1991]. Värähtelyspektristä voidaan laskea tunnuslukuja samalla tavalla kuin aikatason signaalista. Esimerkkejä kunnonvalvonnassa käytetyistä spektrin tunnusluvuista ovat spektrin tehollisarvo (RMS), amplitudin keskiarvo, keskihajonta ja normaalihajonta. Kepstri on logaritmisen amplitudispektrin Fourier-muunnos, jolla saadaan esille spektrissä esiintyvät jaksolliset komponentit. Näitä ovat värähtelysignaalin harmoniset komponentit ja niiden mahdolliset sivukaistat [Randall 1981]. Kepstristä voidaan laskea samat tilastolliset tunnusluvut kuin aikatason signaalista ja spektristä. Verhokäyräanalyysi Laakerin vauriota indikoivat värähtelyt voivat olla amplitudiltaan huomattavasti alhaisemmat kuin koneesta ja sen ympäristöstä tulevat muut värähtelyt. Lisäksi vauriota indikoivat vaurion ominaistaajuudet ovat usein lähellä ympäristömelun taajuuksia. Vaurion aiheuttamat impulssit kykenevät kuitenkin herättämään laakerin tai laakeripesän värähtelemään omalla resonanssitaajuudellaan, joka on selvästi ympäristömelun taajuutta korkeampi. Verhokäyrämenetelmässä kierretään matalataajuisen ja suuriamplitudisen ympäristömelun aiheuttamat esteet suodattamalla mitattavaksi ainoastaan kapea kaista korkeataajuisia värähtelyjä laakerin pesän resonanssitaajuuden ympäristöstä. Tämä signaali tasasuunnataan ja siitä piirretään verhokäyrä [Mustonen 2000].

18 17 (32) Kuva 9. Tasasuunnatun signaalin verhokäyrä [Mustonen 2000]. Verhokäyrän spektristä saadaan helposti selville vikataajuudet. Kuva 9 esittää tasasuunnatun signaalin verhokäyrää. Käyrä "verhoaa" alkuperäisen signaalin huiput. Erilaisia kauppanimiä pääperiaatteiltaan samalle verhokäyrämenetelmälle ovat Envelope analysis, High frequency resonance technique ja Amplitude demodulation [Mikkonen 1995]. Kuvassa (Kuva 10) on esitetty esimerkki erään paperikonetelan laakerin verhokäyräspektristä. Kun kyseinen laakeri myöhemmin vaihdettiin, havaittiin laakerin ulkorenkaalla halkaisijaltaan noin 10 mm levyinen korroosiosta alkunsa saanut vaurio. Vauriota ei voitu havaita samanaikaisesti mitatuista kiihtyvyysspektreistä [Parikka et al. 2002] Kaipola PK6 syl 27 envelope Verhokäyräspektri Kiihtyvyys [m/s2] Taajuus [Hz] Kuva 10. Erään paperikonetelan laakerin verhokäyräspektri. Piikit osuvat ulkorenkaan vikataajuudelle ja sen monikerroille [Parikka et al. 2002]. Peakvue PeakVue on CSI:n kehittämä ja patentoima menetelmä. PeakVue-mittauksissa käytetään ylipäästösuodatusta, jotta voidaan tutkia tarkasti korkeampia taajuusalueita ja siellä esiintyviä
![Erilaisia kauppanimiä pääperiaatteiltaan samalle verhokäyrämenetelmälle ovat Envelope analysis, High frequency resonance technique ja Amplitude demodulation [Mikkonen 1995].](/docs-images/47/3149346/images/page_18.jpg "Kuvassa (Kuva 10) on esitetty esimerkki erään paperikonetelan laakerin verhokäyräspektristä.")
19 18 (32) pieniamplitudisia ilmiöitä, kuten alkavista laakerivaurioista aiheutuvia jännitysaaltoja. PeakVuemittausmenetelmä soveltuu erityisen hyvin hitaasti pyörivien koneiden kunnonvalvontaan. Kunnox [2004] on esittänyt esimerkin PeakVue-menetelmän käytöstä hitaasti pyörivien koneiden kunnonvalvonnassa. Esimerkkikone on suuri jatkuvatoiminen vaakasuuntaisen säiliön sekoittaja, ja se voitiin luokitella tuotantoprosessin kannalta erittäin kriittiseksi koneeksi. Sekoittajan pyörimisnopeus oli noin 10 kierrosta minuutissa (RPM) ja sen laakerina oli pallomainen rullalaakeri jossa oli vierintäkehällä 19 rullaa. Laakeri oli asennettu siten että sisäkehä pyöri koneen pyöriessä. Kokemuksen mukaan normaaleilla nopeus- ja kiihtyvyysmittauksilla ei voitu valvoa koneen kuntoa riittävän luotettavasti. PeakVue-mittauksien aikatason (kiihtyvyyden) huipusta-huippuun-arvoa ja sen trendiä pidettiin erittäin hyvänä koneen kunnosta kertovana tunnuslukuna. Eräässä mittauksessa havaittiin mittauksen huipusta-huippuun-arvon kohonneen noin kolminkertaiseksi verrattuna edelliseen mittaukseen. Mittaaja oli tutkinut PeakVuemittauksen spektriä ja aikatasoa, mutta mittauksissa ei ollut havaittavissa laakerin vikataajuuksia. Mittauksia analysoitaessa havaittiin että spektrissä näkyi taajuus, joka oli 19 kertaa koneen pyörimisnopeus. Taajuus oli mitatun laakerin sisä- ja ulkokehän vikataajuuksien summa. Taajuus oli myös sama kuin koneen pyörimistaajuuden ja laakerin vierintäelinten lukumäärän tulo. Kun mittaajat tämän jälkeen alkoivat tutkia, milloin laakeriin oli viimeksi lisätty voitelurasvaa, selvisi että normaaleja voitelukierroksia oli jostain syystä jäänyt tekemättä, ja laakerin edellisestä voitelurasvauksesta oli kulunut jo normaalia pidempi aika. Tämän jälkeen laakeriin lisättiin rasvaa ja värähtelyn taso putosi entiselle tasolleen (Kuva 11). Kuva 11. Esimerkki PeakVue-menetelmän käytöstä hitaasti pyörivien koneiden kunnonvalvonnassa: rasvavoidellun vierintälaakerin PeakVue-spektri ennen (alh.) ja jälkeen jälkivoitelun [Kunnox 2004]. SEE SEE on SKF AB:n markkinanimi verhokäyrämenetelmää käyttävälle tekniikalle, jolla pyritään löytämään laakerivaurioon tai voitelun puutteisiin viittaavat heikkotehoiset signaalit
 ja sen laakerina oli pallomainen rullalaakeri jossa oli vierintäkehällä 19 rullaa.")
20 19 (32) koneen ja ympäristön melun joukosta. Menetelmässä käytetään laajakaistaista akustisen emission anturia ja mittauksen taajuusalue on Jonesin [1994] mukaan khz. SEE - menetelmällä saadaan tuotettua spektri taajuusalueelta, jolla laakerivauriotaajuudet tyypillisesti esiintyvät ( Hz), mutta spektrissä esiintyvät värähtelyn amplitudit eivät ole vertailukelpoisia tavallisen spektrin kanssa [Jones 1994]. SKF:n mukaan SEE-mittauksilla voidaan havaita voitelukalvon pettäminen vierintälaakereista. Tällöin kuitenkin tarvitaan tueksi tavanomaista värähtelyn mittausta, jolla voidaan erottaa alkavat laakerivauriot tai muut ongelmat, jotka myös voivat vastaavalla tavalla näkyä SEE-arvossa. Periaatteessa SEE-mittausta voidaan pitää tavanomaista värähtelymittausta herkempänä menetelmänä. SPM Shock pulse method (suomeksi iskusysäysmenetelmä) on SPM Instruments AB:n patentoima värähtelynmittausmenetelmä, joka perustuu 32 khz resonanssitaajuuden omaavan anturin käyttöön. Korkean mittaustaajuuden käytöllä pyritään saamaan esille laakerin vaurioitumiseen viittaavat heikkotehoiset signaalit koneen muun värähtelyn joukosta. Iskusysäysmenetelmää käyttävät laitteet määrittävät signaalin sisältämän energian kahdella tasolla, jotka perustuvat signaalipiikkien esiintymistiheyteen ja amplitudiin. Laitteella määritetään amplituditaso, jonka ylittää 1000 pulssia sekunnissa, sekä taso, jonka ylittää 50 pulssia sekunnissa. Laite ilmoittaa mittaustuloksena näiden tasojen värähtelyamplitudit sekä tasojen erotuksen desibeleinä [Mustonen 2000]. Menetelmällä voidaan havaita laakerin puutteellinen voitelu ja alkava laakerivaurio [Sundberg 1997]. Suodatettu anturisignaali kuvaa painevaihteluja laakerin vierintäpinnoilla kosketusvyöhykkeellä. Kun laakerin voitelukalvo on paksu, iskusysäystaso on matala ilman erottuvia huippuja. Taso kohoaa kun voitelukalvo ohenee, mutta erottuvia huippuja ei ole vieläkään. Vaurio aiheuttaa voimakkaita pulsseja epäsäännöllisin välein. SPM Spectrum saadaan muuntamalla laakerimittauksen iskusysäyksien aikatasosignaali FFT-spektriksi. Voitelun optimointiin SPM-menetelmää on käytetty esimerkiksi voimalaitosten voiteluhuollossa, jossa rasvavoideltujen laakereiden ohjeiden mukaisesta jälkivoitelusta on siirrytty kokonaan mittauspohjaiseen lisävoiteluun. Lisävoitelu tehdään silloin, kun voitelukalvon paksuus on mittauksen perusteella alle hälytysrajan. Käytännössä on havaittu, että jo alle 20 gramman lisävoitelumäärät näyttävät, onko lisävoitelulla voitelukalvoa parantava vaikutus. Kokemukset laitoksissa ovat olleet hyviä ja laakerivaurioiden määrä on selvästi vähentynyt [Kinnunen 2003]. SPM-metodia on suositeltu myös puhaltimien rasvavoideltujen laakerien valvontaan [Witt & Sohn 1999]. Kiihtyvyyden derivaatat Erityisesti hitaasti pyörivien koneiden laakerien kunnonvalvonnassa on todettu, että aikatasossa olevan kiihtyvyyssignaalin derivoiminen kertaalleen tai kahdesti ajan suhteen helpottaa vikaantumisten havaitsemista [Lahdelma & Riutta 1996]. Lahdelman [1992] julkaisussa otettiin käyttöön x (4) -signaali ja esitettiin perusteet sitäkin korkeampiasteisten aikaderivaattojen käytölle. Lahdelman [2002] mukaan korkea-asteisille aikaderivaatoille on käyttöä koneiden kunnonvalvonnassa ja Suomessa x (4) -signaalia hyödynnetään jo useissa yrityksissä. Lahdelma & Kotila [2003] ovat esittäneet tuloksia reaaliderivaattojen käytöstä vierintälaakerin vikaantumisen havainnoinnissa. Tutkimuksen koeajot oli tehty laakerikoelaitteella, jossa radiaalikuorma aikaansaatiin hydraulisylinterin avulla. Kiihtyvyyssignaalista (x (2) ) alkaen signaalin derivointiastetta kasvatettiin askelvälin ollessa
![vertailukelpoisia tavallisen spektrin kanssa [Jones 1994]. SKF:n mukaan SEE-mittauksilla voidaan havaita voitelukalvon pettäminen vierintälaakereista.](/docs-images/47/3149346/images/page_20.jpg "Tällöin kuitenkin tarvitaan tueksi tavanomaista värähtelyn mittausta, jolla voidaan erottaa alkavat laakerivauriot tai muut ongelmat, jotka myös voivat vastaavalla tavalla näkyä SEE-arvossa.")
21 20 (32) 0,25. Tunnuslukuina käytettiin huippuarvoa ja kurtosista. Signaalin herkkyys oli paras derivointiasteen ollessa 4,5-4,75. Tällöin signaalissa oli hyvin vähän kohinaa ja vierintälaakerin sisäkehävialle tyypilliset iskut tulivat selkeästi esille. Akustisen emission mittaus Akustisen emission mittaamiseen käytetään pietsosähköisiä antureita, jotka toimivat taajuusalueella 40 khz - 1 MHz [Kuoppala et al. 1986]. Uuden vierintälaakerin tuottama akustinen emissio on hyvin alhaisella tasolla [SKF 1996]. Akustisen emission mittaamista voidaan käyttää vierintälaakerien kunnonvalvonnassa, mutta ongelmana ovat sopivan taajuusalueen valinta, anturin kiinnittäminen ja signaalia vaimentavat rajapinnat mitattavan kohteen ja anturin välillä [Mikkonen 1995]. Akustisen emission signaalia voidaan käsitellä aika- ja taajuustasossa samalla tavoin, kuin tavallista värähtelysignaalia ja siitä voidaan määrittää erilaisia tunnuslukuja. Signaalin analysoinnissa on käytetty myös verhokäyrämenetelmää [Li et al. 1997, Shiroishi et al. 1997]. Akustista emissiota aiheutuu vierintälaakerivaurioiden yhteydessä pääasiassa kahden eri ilmiön seurauksena. Laakerissa tapahtuva särön kasvu vapauttaa muodonmuutosenergiaa, joka etenee jännitysaaltoina. Toisaalta akustista emissiota aiheuttaa sama mekanismi kuin värähtelyäkin: vierintäpinnalla olevan vaurion kohtaaminen toisen pinnan kanssa [Li et al. 1999, Tandon et al. 1999]. Akustisen emission mittaustaajuus on yleensä yli 100 khz, jolloin mekaanisista koneenelimistä peräisin oleva matalataajuinen melu jää pois. Akustiseen emissioon perustuvalla kunnonvalvonnalla voidaan lisäksi havaita vauriot, jotka eivät ulotu laakerin vierintäpintaan saakka ja jotka jäisivät havaitsematta värähtelyn mittaamiseen perustuvilla menetelmillä [Choudhury et al. 2000]. Yleisimmin käytetyt parametrit akustisen emission mittauksessa ovat signaalin maksimiamplitudin seuraaminen, tietyn ennaltamäärätyn amplitudirajan tietyssä ajanjaksossa ylittävien näytteiden laskenta, sekä AE-purskeiden keston ja esiintymisvälin seuranta. AEpurske koostuu useasta peräkkäisestä tietyn amplitudirajan ylittävästä aallosta [Choudhury et al. 2000]. Choudhuryn [2000] tutkimuksessa todetaan tietyn amplitudirajan ylittävien näytteiden laskennan soveltuvan hyvin tutkitun vierintälaakerin sisäkehä- ja vierintäelinvaurion havaitsemiseen. Li et al. [1997] ja Shiroishi et al. [1997] ovat esittäneet tutkimustuloksia värähtelykiihtyvyyden ja akustisen emission käytöstä n. ø 73 mm kartiomaisen rullalaakerin vauriodiagnostiikassa. AE- mittauksissa käytettiin 150 khz resonanssitaajuudella toimivaa anturia ja demoduloivaa esivahvistinta Tutkimuksessa todetaan, että värähtelykiihtyvyyden ja akustisen emission aikatason analyysit, kuten tehollisarvon laskenta, soveltuvat voiteluaineen epäpuhtauksista tai puutteellisesta voitelusta aiheutuvien ei-paikallisten vaurioiden havaitsemiseen, mutta eivät sovellu vaurion vakavuuden arviointiin. Värähtelykiihtyvyydestä lasketulla erityisellä taajuustason tunnusluvulla pystyttiin saamaan aikaan korrelaatio paikallisen vaurion laajuuden kanssa. Akustisella emissiolla ei voitu havaita laakerin sisäkehän vauriota. Yoshiokan [1999 ja 1992] tutkimuksissa akustisen emission mittauksilla pystyttiin paikantamaan väsymissärö kuulalaakerin kehälle ja vierintäelimeen. Kehitetyssä menetelmässä mitataan tietyn amplitudirajan ylittävien AE-purskeiden välistä aikaa. Vaurioitunut laakerin osa aiheuttaa akustista emissiota joutuessaan kuormituksen alle ja nämä kuormitusintervallit pystytään laskemaan laakerin kinetiikasta samaan tapaan kuin perinteiset laakerin osien vauriotaajuudetkin. Lisäksi menetelmällä pystyttiin ennustamaan laakerin vierintäpinnan lohkeilu 127 tuntia kestäneessä väsytyskokeessa yli 5 tuntia ennen värähtelykiihtyvyydellä havaittua vauriota. Kokeissa käytettiin 320 khz resonanssitaajuuden
22 21 (32) omaavaa AE-anturia mitattuna taajuuskaistalta khz 70 db vahvistuksella, jolloin amplitudiraja AE-purskeiden laskennalle oli 1,0 V. Samantapainen menetelmä AE-signaalin analysoimiseksi on kehitetty myös lähteen [Li et al. 1995] tutkimuksessa. Tässä tapauksessa AE purskeiden välistä aikaa tarkkaillaan aikatason signaalin autokorrelaation avulla. Parikka et al. [2002] ovat raportoineet akustisen emission käytöstä vierintälaakerin käyntivälyksen ja voitelukalvon paksuuden muutosten havainnoinnissa. Tutkimuksessa käytettiin koelaitteistoa, jossa laakerin sisärengasta lämmittämällä pienennettiin hallitusti laakerin käyntivälystä ja pystyttiin havaitsemaan akustisen emission tason nousun perusteella laakerin käyntivälyksen loppuminen. Myös voitelukalvon paksuuden laskeminen rajavoitelutilanteeseen sai akustisen emission tason nousemaan niissä tapauksissa joissa käyntivälys pysyi riittävänä. Seurannassa käytettiin AE-signaalista laskettuja tunnuslukuja, joista erityisesti kurtosis indikoi hyvin muutoksista myös niissä tapauksissa, joissa pyörimisnopeus ei pysynyt vakiona. Edellä esitetyt tutkimukset akustisen emission käytöstä vierintälaakerin kunnonvalvonnassa on suoritettu laboratorio-oloissa laakeritestipenkissä. Testattujen laakerien ulkohalkaisijat olivat kokoluokkaa 47 mm - 73 mm. Laakerit olivat öljyvoideltuja ja testeissä käytetyt akselin pyörintänopeudet olivat kierrosta minuutissa. AE-anturit olivat pääosin resonanssityyppisiä resonanssitaajuuksilla 150 khz khz. Miettinen [2000] on tutkinut akustisen emission käyttöä rasvavoideltujen vierintälaakerien kunnonvalvonnassa. Monipuolisen tutkimuksen kohteena oli sekä rasvassa olevien epäpuhtauksien, vierintälaakerin voitelutilanteen että eri käyttöparametrien vaikutuksen havainnointi akustisen emission avulla. Myös tämän tutkimuksen perusteella akustisen emission mittausta voidaan pitää vierintälaakerien kunnonvalvontaan sopivana menetelmänä Voiteluaineanalyysit Sähkömoottoreissa käytettävät laakerit ovat rasvavoideltuja. Laakereissa käytettävien voitelurasvojen kuntomääritykseen voidaan pääpiirteissään käyttää samoja menetelmiä kuin voiteluöljyjen analysointiin. Erona on kuitenkin se, että monet menetelmät ovat sovellettavissa rasvoille vasta, kun rasva on liuotettu nestemäiseen muotoon [Parikka 2004]. Rasvojen analysoinnissa menetelmät voidaankin jakaa suoriin menetelmiin ja liuotinmenetelmiin [Andersson, 2002]. Monissa tapauksissa suorien analyysimenetelmien tarkkuus on liuotinmenetelmien tarkkuutta heikompi. Rasvojen kuntomääritykset suoritetaan lähes poikkeuksetta kohteesta otetuille näytteille laboratorio-olosuhteissa. Öljyanalyysimenetelmiä, joilla on mahdollista arvioida koneenosien kulumistilannetta ja siten esimerkiksi laakerin vaurioitumista, ovat mm.: hiukkaslaskenta ferrografinen kulumishiukkasanalyysi plasma-atomiemissiospektrometriset kulumametallianalyysit röntgenfluoresenssiin perustuvat alkuaineanalyysit magneettikenttään perustuvat ja magneettisia hiukkasia keräävät ilmaisimet Hiukkaslaskenta Hiukkaslaskenta on öljyn kunnonvalvonnan perusmittaus, joka paljastaa suodatuksen puutteita, toimintahäiriöitä, epänormaalia kulumista, vaurioita ja ulkoisten tekijöiden vaikutusta. Laboratoriossa suoritettavassa automaattisessa hiukkaslaskennassa nestemäinen näyte virtaa valodetektorin lävitse ja näytteen sisältämät hiukkaset rekisteröidään niiden aiheuttamien varjostumien perusteella. Analyysin päätyttyä analysaattori tulostaa näytteen
23 22 (32) hiukkaskokojakauman sekä mittauskohtaisesti että toistomittausten keskiarvona. Hiukkaslaskenta soveltuu kaikille tavanomaisille mineraaliöljyille, synteettisille voiteluöljyille ja mineraaliöljypohjaisille voitelurasvoille [Parikka et al. 2004]. Ferrografia Suurin osa koneiden kulumisen seurauksena syntyneistä hiukkasista on ferromagneettisia. Ferrografiassa tätä tosiasiaa käytetään hyväksi hiukkasten erottamiseksi tutkittavasta öljystä tai rasvaliuoksesta. Menetelmä voidaan jaotella näytelevyn valmistukseen ja varsinaiseen analysointiin valomikroskoopin avulla. Ferrografian avulla saadaan selville millaisesta kulumismekanismista on kysymys, sekä usein myös kulumisjätteen alkuperä. Hiukkasten muodosta, pintarakenteesta, koosta ja väristä voidaan arvioida kulumismekanismi (vrt. Kuva 12) ja sen merkitys. Analyysin apuna voidaan käyttää erityistä kulumishiukkaskartastoa. Ferrografia-analyysi voidaan suorittaa luotettavasti vain laboratorio-analyysinä, ja sen onnistumisessa on analysoijan kokemuksella suuri merkitys. Ferrografiamenetelmän soveltamisen vaikeutena on rasvarakenteen luottaminen niin pienijakoiseksi, että näytelevyn valomikroskooppitarkastelu onnistuu luotettavasti [Parikka, 2004]. Kuva 12. Eri kulumismekanismien tuottamia hiukkasia [Korpi et al. 2003]. Magneettikenttään perustuvat ja magneettisia hiukkasia keräävät ilmaisimet Voiteluainenäytteen sisältämät ferromagneettiset hiukkaset voidaan tunnistaa sähkömagneettisin keinoin ja niiden määrän perusteella voidaan arvioida vierintälaakerin kulumisen astetta. Tätä periaatetta käytetään hyväksi mm. VTT:n kehittämässä voitelurasvaanalysaattorissa [Andersson 2002]. Metallihiukkaset vastustavat nopeita muutoksia induktiivisen anturin synnyttämässä magneettikentässä, mikä ilmenee elektronisen piirin impedanssin muutoksena. Menetelmän etuna on mm. analyysin suorittamisen ja tulosten saamisen nopeus. Kemiantekniikkaan perustuvat menetelmät Epäpuhtauksien analysointiin voidaan käyttää myös kemiantekniikkaan perustuvia laboratoriossa suoritettavia menetelmiä. Tällaisia ovat esimerkiksi atomiemissiospektroskopia (ICP-AES) ja atomiabsorptiospektroskopia (AAS, DIN 51815, 51831) alkuainepitoisuuksien määritykseen. Liuotetun rasvanäytteen kohdalla vaikeutena näissä menetelmissä on hiukkasten ja voiteluaineen sisältämien alkuainepitoisuuksien erottaminen toisistaan. Mikäli epäpuhtaushiukkasia voidaan eristää voitelurasvasta riittävän suuri tilavuus, hiukkasten
24 23 (32) faasikokoonpano on mahdollista määrittää röntgendiffraktiolla. Vastaavissa tapauksissa voidaan käyttää energiadispersiivistä spektroskopiaa (EDS) ja röntgenfluoresenssia hiukkasten alkuainekoostumuksen ja siten mahdollisen alkuperän määritykseen [Andersson 2000] Lämpökamerakuvaus / lämpötilamittaus ja -analysointi Lämpökameran käyttö kunnonvalvonnassa on lisääntynyt laitteistojen muututtua teknologian kehittymisen myötä pienikokoisemmiksi ja helppokäyttöisemmiksi. Lämpökameran periaatteena on vastaanottaa kohteen lähettämää lämpösäteilyä, mitata sen voimakkuutta ja muuntaa se lämpötilajakauman mukaan kuvaksi. Kameroissa on muistikortti, jonka kautta lämpökuva saadaan siirrettyä suoraan tietokoneelle analyysia ja raportointia varten. Etuna antureihin perustuvaan kunnonvalvontaan verrattuna on mm. lämpökuvan visuaalisuus, mittauspisteen helppo siirrettävyys ja se, että yhdellä "mittauksella" voidaan tallettaa laajan alueen tai jopa useamman kohteen lämpötilajakauma. Tietotekniikan avulla lämpökamerakuvista voidaan irrottaa erilaista informaatiota. Esimerkkinä vierintälaakerien valvonnasta lämpökameran avulla voidaan mainita kuljettimien rullastojen valvonta. Kuljettimien pölyräjähdyspaloissa menetetään silloin tällöin miljoonia tuotantoseisokeista johtuvista menetyksissä ja korjauskustannuksissa. Monien tuhoisien kuljetintulipalojen syynä ovat nimenomaan hitaasti pyörivien laakereiden aiheuttamat palot. Laakerien tarkastus lämpökameralla käy erittäin nopeasti eikä jätä epäselväksi laakerien kuntoa [Stjernberg 2000]. Kuva 13. Esimerkki lämpökameran käytöstä kuljettimen laakerien kunnonvalvonnassa. Laakerin lämpötila on kohonnut pölyisessä paikassa vaarallisen korkeaksi [Stjernberg 2000]. Vierintälaakerien lämpötilan mittaus ei yleensä anna varhaista indikaatiota alkavasta laakerivauriosta. Ennakoivassa kunnonvalvonnassa on kuitenkin tärkeää seurata laakerin tai voiteluöljyn lämpötiloja, sillä suunniteltua korkeampi käyttölämpötila lyhentää laakerin kestoikää. Lämpötiloissa tapahtuneet muutokset voivat myös kertoa muista voitelujärjestelmän häiriöistä. Uutena sovelluksena voidaan mainita pyörivän laakerirenkaan langaton lämpötilamittaus, jonka avulla voidaan mm. valvoa laakerin sisäistä lämpötilaeroa ja arvioida käyntivälyksen tilaa [Parikka et al. 2002]. Vaara käyntivälyksen pienenemisestä on
25 24 (32) olemassa erityisesti sovelluksissa, joissa akselin kautta kulkee lämpöä tai laakerin ulkorengas jäähtyy voimakkaasti. Tällaisia ovat esimerkiksi paperikoneiden kuivaussylinterit ja laivapotkureiden laakeroinnit Staattorivaurioiden havainnointimenetelmät Sähköiset analyysit Virtaspektrimittaus Moottorin staattorin ilmavälin epäkeskisyys voidaan paljastaa monitoroimalla moottorin staattorin syöttövirrasta laskettua virtaspektriä. Staattorin virtaspektrissä näkyy epäkeskisyystilanteessa moottorin syöttötaajuuden ympärillä kohonneina amplituditasoina sivunauhoja, joiden taajuus on [Benbouzid 1998]. f 1 s = 1 ± n p (2) epäkesk f verkko missä f verkko on verkkotaajuus, n on 1,2,3,... ja s on jättämän taajuus ja p on moottorin napaparien lukumäärä. Yhtälön etuna on, että siinä ei tarvita tarkempaa tietoa moottorikonstruktiosta (esim. roottorisauvojen lukumäärää). Jännitespektrimittaus Eristevaurioihin liittyvät staattorivauriot voidaan havainnoida moottorilta tehtävillä jännitemittauksilla. Eristevauriosta mahdollisesti aiheutuva kierrosoikosulku voidaan havaita mittaamalla ja analysoimalla suurehkolla, akselin ympärille kiedotulla käämillä akselivuo. Kierrosoikosulun paikka voidaan paikantaa sijoittamalla neljä käämiä symmetrisesti moottorin ympärille eri neljänneksiin säteittäiselle etäisyydelle, joka on noin puolet akselin etäisyydestä käämityksen loppuun. Mitatun jännitesignaalin akselinvuon indikoiva taajuuskomponentti on [Nandi 1999, Thomson & Gilmore 2003]. vuo ( k ± n( 1 s p) f verkko f = ) (3) missä k on pariton komponentti 1 tai 3 ja n on 1, 2, 3,..., (2p-1) ja p on napaparien f f, lukumäärä, f verkko on verkkotaajuus ja s on moottorin jättämän taajuus ( ) missä f synkroni.on synkroni- ja f pyösnop pyörimistaajuus. synkroni pyörnop Staattorivirran epäsymmetria Moottorivauriot voivat synnyttää epäsymmetrisen staattorivirran. Koska usein myös moottoria syöttävä sähköverkko on epäsymmetrinen, luotettavan vaurioindikaation saamiseksi on aina pystyttävä analysoimaan myös verkon epäsymmetrisyydestä aiheutuva osa staattorivirroissa. Yleisin menetelmä epäsymmetrisyyden ilmaisemiseen on suureen jako symmetrisiin komponentteihin [Lindh 1999]. Symmetriset komponentit voidaan selvittää mitattavasta suureesta joko laskemalla suureen tehollisarvo-osoittimet ja jakamalla ne myötä-, vasta- ja nollakomponentteihin tai käyttämällä kaksiakselimallin mukaisia virtakomponentteja ja selvittämällä näistä haluttu epäsymmetrinen komponentti. Moottorin avaruusvektoriteorian mukaiset staattorivirrat voidaan jakaa kaksiakseliesitykseen [Lindh 1999]:
Värähtelypohjaiset mittaus- ja analysointimenetelmät rasvavoideltujen vierintälaakerien voiteluvirheiden tunnistamiseksi
 18.4.2006 Värähtelypohjaiset mittaus- ja analysointimenetelmät rasvavoideltujen vierintälaakerien voiteluvirheiden tunnistamiseksi Kirjoittajat: Luottamuksellisuus: Risto Parikka ja Jari Halme Julkinen
18.4.2006 Värähtelypohjaiset mittaus- ja analysointimenetelmät rasvavoideltujen vierintälaakerien voiteluvirheiden tunnistamiseksi Kirjoittajat: Luottamuksellisuus: Risto Parikka ja Jari Halme Julkinen
Servo-case, tilanne 15.4.2005. jari.halme@vtt.fi
 Servo-case, tilanne 15.4.2005 Jari Halme Tutkija jari.halme@vtt.fi Case: Servomoottorin toimintakunnon valvonta ja testaus Vastuullinen yritys ja vastuuhenkilö: Kimmo Ukkonen, Foxconn Oy Muut osallistuvat
Servo-case, tilanne 15.4.2005 Jari Halme Tutkija jari.halme@vtt.fi Case: Servomoottorin toimintakunnon valvonta ja testaus Vastuullinen yritys ja vastuuhenkilö: Kimmo Ukkonen, Foxconn Oy Muut osallistuvat
5$32577, 1 (8) Kokeen aikana vaihteisto sijaitsi tasalämpöisessä hallissa.
 Kokeen aikana vaihteisto sijaitsi tasalämpöisessä hallissa.") 5$32577, 1 (8) 5967(&12/2*
5$32577, 1 (8) 5967(&12/2*
Pienjännitejohtoa voidaan kuvata resistanssin ja induktiivisen reaktanssin sarjakytkennällä.
 SÄHKÖJOHDOT Pienjännitejohtoa voidaan kuvata resistanssin ja induktiivisen reaktanssin sarjakytkennällä. R jx Resistanssit ja reaktanssit pituusyksikköä kohti saadaan esim. seuraavasta taulukosta. Huomaa,
SÄHKÖJOHDOT Pienjännitejohtoa voidaan kuvata resistanssin ja induktiivisen reaktanssin sarjakytkennällä. R jx Resistanssit ja reaktanssit pituusyksikköä kohti saadaan esim. seuraavasta taulukosta. Huomaa,
Vierintälaakerin rasvavoitelutilanteen testaus koelaitteessa, osa 4 Kokeet 14.11.2005 13.12.2005.
 TUTKIMUSRAPORTTI NRO VTT R 05659 06 22.6.2006 Vierintälaakerin rasvavoitelutilanteen testaus koelaitteessa, osa 4 Kokeet 14.11.2005 13.12.2005. Kirjoittajat: Luottamuksellisuus: Risto Parikka, Hannu Sainio
TUTKIMUSRAPORTTI NRO VTT R 05659 06 22.6.2006 Vierintälaakerin rasvavoitelutilanteen testaus koelaitteessa, osa 4 Kokeet 14.11.2005 13.12.2005. Kirjoittajat: Luottamuksellisuus: Risto Parikka, Hannu Sainio
RVS-TECNOLOGYN KOKEILU HAMMASVAIHTEESSA
 RAPORTTI 1 (8) RVS-TECNOLOGYN KOKEILU HAMMASVAIHTEESSA 1. Yleistä Kokeilukohteena oli koulutuskäytössä oleva yksiportainen vinohampainen hammasvaihde, jonka välityssuhde on 2.7 Vaihdetta kuormitettiin
RAPORTTI 1 (8) RVS-TECNOLOGYN KOKEILU HAMMASVAIHTEESSA 1. Yleistä Kokeilukohteena oli koulutuskäytössä oleva yksiportainen vinohampainen hammasvaihde, jonka välityssuhde on 2.7 Vaihdetta kuormitettiin
Oikosulkumoottorikäyttö
 Oikosulkumoottorikäyttö 1 DEE-33040 Sähkömoottorikäyttöjen laboratoriotyöt TTY Oikosulkumoottorikäyttö T. Kantell & S. Pettersson 2 Laboratoriomittauksia suorassa verkkokäytössä 2.1 Käynnistysvirtojen
Oikosulkumoottorikäyttö 1 DEE-33040 Sähkömoottorikäyttöjen laboratoriotyöt TTY Oikosulkumoottorikäyttö T. Kantell & S. Pettersson 2 Laboratoriomittauksia suorassa verkkokäytössä 2.1 Käynnistysvirtojen
Ongelmia mittauksissa Ulkoiset häiriöt
 Ongelmia mittauksissa Ulkoiset häiriöt Häiriöt peittävät mitattavia signaaleja Häriölähteitä: Sähköverkko 240 V, 50 Hz Moottorit Kytkimet Releet, muuntajat Virtalähteet Loisteputkivalaisimet Kännykät Radiolähettimet,
Ongelmia mittauksissa Ulkoiset häiriöt Häiriöt peittävät mitattavia signaaleja Häriölähteitä: Sähköverkko 240 V, 50 Hz Moottorit Kytkimet Releet, muuntajat Virtalähteet Loisteputkivalaisimet Kännykät Radiolähettimet,
SMG-4500 Tuulivoima. Viidennen luennon aihepiirit YLEISTÄ ASIAA GENERAATTOREISTA
 SMG-4500 Tuulivoima Viidennen luennon aihepiirit Tuulivoimaloiden generaattorit Toimintaperiaate Tahtigeneraattori Epätahtigeneraattori Vakionopeuksinen voimala Vaihtuvanopeuksinen voimala 1 YLEISTÄ ASIAA
SMG-4500 Tuulivoima Viidennen luennon aihepiirit Tuulivoimaloiden generaattorit Toimintaperiaate Tahtigeneraattori Epätahtigeneraattori Vakionopeuksinen voimala Vaihtuvanopeuksinen voimala 1 YLEISTÄ ASIAA
AC-servomoottori - rakenne, vikaantuminen ja havainnointimenetelmät.
 TUTKIMUSRAPORTTI NRO LUONNOS 30.11.2004 3-vaihe invertteri ACmoottori pyör.nop Jännite Virta Lämpötila Värähtely Monitorointijärjestelmä PC AC-servomoottori - rakenne, vikaantuminen ja havainnointimenetelmät.
TUTKIMUSRAPORTTI NRO LUONNOS 30.11.2004 3-vaihe invertteri ACmoottori pyör.nop Jännite Virta Lämpötila Värähtely Monitorointijärjestelmä PC AC-servomoottori - rakenne, vikaantuminen ja havainnointimenetelmät.
SÄHKÖKÄYTÖT. Lappeenrannan teknillinen yliopisto Konetekniikan osasto Mekatroniikan ja virtuaalisuunnittelun laboratorio
 Lappeenrannan teknillinen yliopisto Konetekniikan osasto Mekatroniikan ja virtuaalisuunnittelun laboratorio Ko4210000 Mekatroniikan peruskurssi Kevät 2007 SÄHKÖKÄYTÖT SISÄLLYSLUETTELO 1 YLEISTÄ ------------------------------------------------------------------------------------------------------------------------------
Lappeenrannan teknillinen yliopisto Konetekniikan osasto Mekatroniikan ja virtuaalisuunnittelun laboratorio Ko4210000 Mekatroniikan peruskurssi Kevät 2007 SÄHKÖKÄYTÖT SISÄLLYSLUETTELO 1 YLEISTÄ ------------------------------------------------------------------------------------------------------------------------------
LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi. Servokäyttö (0,9 op)
") LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi Servokäyttö (0,9 op) JOHDNTO Työssä tarkastellaan kestomagnetoitua tasavirtamoottoria. oneelle viritetään PI-säätäjä
LTY/SÄTE Säätötekniikan laboratorio Sa2730600 Säätötekniikan ja signaalinkäsittelyn työkurssi Servokäyttö (0,9 op) JOHDNTO Työssä tarkastellaan kestomagnetoitua tasavirtamoottoria. oneelle viritetään PI-säätäjä
Spektri- ja signaalianalysaattorit
 Spektri- ja signaalianalysaattorit Pyyhkäisevät spektrianalysaattorit Suora pyyhkäisevä Superheterodyne Reaaliaika-analysaattorit Suora analoginen analysaattori FFT-spektrianalysaattori DFT FFT Analysaattoreiden
Spektri- ja signaalianalysaattorit Pyyhkäisevät spektrianalysaattorit Suora pyyhkäisevä Superheterodyne Reaaliaika-analysaattorit Suora analoginen analysaattori FFT-spektrianalysaattori DFT FFT Analysaattoreiden
SÄHKÖMOOTTORI JA PROPULSIOKÄYTTÖ
 SÄHKÖMOOTTORI JA PROPULSIOKÄYTTÖ Sähkökonetyyppien soveltuvuus pienitehoiseen propulsioon 25.5.2011 Metropolia Ammattikorkeakoulu 1 Sisältö Sähkökoneen funktio Sähkökonetyyppejä Lataavan propulsion vaatimuksia
SÄHKÖMOOTTORI JA PROPULSIOKÄYTTÖ Sähkökonetyyppien soveltuvuus pienitehoiseen propulsioon 25.5.2011 Metropolia Ammattikorkeakoulu 1 Sisältö Sähkökoneen funktio Sähkökonetyyppejä Lataavan propulsion vaatimuksia
SMG-4500 Tuulivoima. Viidennen luennon aihepiirit YLEISTÄ ASIAA GENERAATTOREISTA
 SMG-4500 Tuulivoima Viidennen luennon aihepiirit Tuulivoimaloiden generaattorit Toimintaperiaate Tahtigeneraattori Epätahtigeneraattori Tuulivoimalakonseptit 1 YLEISTÄ ASIAA GENERAATTOREISTA Generaattori
SMG-4500 Tuulivoima Viidennen luennon aihepiirit Tuulivoimaloiden generaattorit Toimintaperiaate Tahtigeneraattori Epätahtigeneraattori Tuulivoimalakonseptit 1 YLEISTÄ ASIAA GENERAATTOREISTA Generaattori
Tietoliikennesignaalit & spektri
 Tietoliikennesignaalit & spektri 1 Tietoliikenne = informaation siirtoa sähköisiä signaaleja käyttäen. Signaali = vaihteleva jännite (tms.), jonka vaihteluun on sisällytetty informaatiota. Signaalin ominaisuuksia
Tietoliikennesignaalit & spektri 1 Tietoliikenne = informaation siirtoa sähköisiä signaaleja käyttäen. Signaali = vaihteleva jännite (tms.), jonka vaihteluun on sisällytetty informaatiota. Signaalin ominaisuuksia
DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä
 1 DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä JK 23.10.2007 Johdanto Harrasteroboteissa käytetään useimmiten voimanlähteenä DC-moottoria. Tämä moottorityyppi on monessa suhteessa kätevä
1 DC-moottorin pyörimisnopeuden mittaaminen back-emf-menetelmällä JK 23.10.2007 Johdanto Harrasteroboteissa käytetään useimmiten voimanlähteenä DC-moottoria. Tämä moottorityyppi on monessa suhteessa kätevä
RATKAISUT: 22. Vaihtovirtapiiri ja resonanssi
 Physica 9. painos (0) RATKAST. Vaihtovirtapiiri ja resonanssi RATKAST:. Vaihtovirtapiiri ja resonanssi. a) Vaihtovirran tehollinen arvo on yhtä suuri kuin sellaisen tasavirran arvo, joka tuottaa vastuksessa
Physica 9. painos (0) RATKAST. Vaihtovirtapiiri ja resonanssi RATKAST:. Vaihtovirtapiiri ja resonanssi. a) Vaihtovirran tehollinen arvo on yhtä suuri kuin sellaisen tasavirran arvo, joka tuottaa vastuksessa
DEE Sähkömoottorikäyttöjen laboratoriotyöt. Tasavirtakäyttö
 Tasavirtakäyttö 1 Esiselostus 1.1 Mitä laitteita kuuluu Leonard-käyttöön, mikä on sen toimintaperiaate ja mihin ja miksi niitä käytetään? Luettele myös Leonard-käytön etuja ja haittoja. Kuva 1.1 Leonard-käyttö.
Tasavirtakäyttö 1 Esiselostus 1.1 Mitä laitteita kuuluu Leonard-käyttöön, mikä on sen toimintaperiaate ja mihin ja miksi niitä käytetään? Luettele myös Leonard-käytön etuja ja haittoja. Kuva 1.1 Leonard-käyttö.
Oikeanlaisten virtapihtien valinta Aloita vastaamalla seuraaviin kysymyksiin löytääksesi oikeantyyppiset virtapihdit haluamaasi käyttökohteeseen.
 Oikeanlaisten virtapihtien valinta Aloita vastaamalla seuraaviin kysymyksiin löytääksesi oikeantyyppiset virtapihdit haluamaasi käyttökohteeseen. 1. Tuletko mittaamaan AC tai DC -virtaa? (DC -pihdit luokitellaan
Oikeanlaisten virtapihtien valinta Aloita vastaamalla seuraaviin kysymyksiin löytääksesi oikeantyyppiset virtapihdit haluamaasi käyttökohteeseen. 1. Tuletko mittaamaan AC tai DC -virtaa? (DC -pihdit luokitellaan
Oikosulkumoottorin vääntömomenttikäyrä. s = 0 n = n s
 Oikosulkumoottorin vääntömomenttikäyrä M max M n M nk. kippauspiste M = momentti M max = maksimimomentti M n = nimellismomentti s = jättämä n = kierrosnopeus n s = tahtikierrosnopeus n n = nimelliskierrosnopeus
Oikosulkumoottorin vääntömomenttikäyrä M max M n M nk. kippauspiste M = momentti M max = maksimimomentti M n = nimellismomentti s = jättämä n = kierrosnopeus n s = tahtikierrosnopeus n n = nimelliskierrosnopeus
SEISOVA AALTOLIIKE 1. TEORIAA
 1 SEISOVA AALTOLIIKE MOTIVOINTI Työssä tutkitaan poikittaista ja pitkittäistä aaltoliikettä pitkässä langassa ja jousessa. Tarkastellaan seisovaa aaltoliikettä. Määritetään aaltoliikkeen etenemisnopeus
1 SEISOVA AALTOLIIKE MOTIVOINTI Työssä tutkitaan poikittaista ja pitkittäistä aaltoliikettä pitkässä langassa ja jousessa. Tarkastellaan seisovaa aaltoliikettä. Määritetään aaltoliikkeen etenemisnopeus
Tiedonkeruu ja analysointi
 Tiedonkeruu ja analysointi ViDRoM Virtual Design of Rotating Machines Raine Viitala 30.9.2015 ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat
Tiedonkeruu ja analysointi ViDRoM Virtual Design of Rotating Machines Raine Viitala 30.9.2015 ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat
Robotin kunnonvalvonta. Robotin kunnonvalvonta. Käyttövarmuus - kp-strategia. Sisältö
 Prognos - vuosiseminaari 2 Robotin kunnonvalvonta Jari Halme Tutkija jari.halme@vtt.fi Sisältö n valinta Robotin kuntoon perustuva Tiedonkeruu Analyysit Robotin kunnonvalvonta 2 Käyttövarmuus - kp-strategia
Prognos - vuosiseminaari 2 Robotin kunnonvalvonta Jari Halme Tutkija jari.halme@vtt.fi Sisältö n valinta Robotin kuntoon perustuva Tiedonkeruu Analyysit Robotin kunnonvalvonta 2 Käyttövarmuus - kp-strategia
Savolainen. Pienvoimalaitoksen käyttötekniikka
 Tekijä: Markku Savolainen Pienvoimalaitoksen käyttötekniikka Sisältö Erilaiset generaattorityypit Sähköntuotannossa käytetyt generaattorityypit Verkkomagnetoitu epätahtigeneraattori Kondensaattorimagnetoitu
Tekijä: Markku Savolainen Pienvoimalaitoksen käyttötekniikka Sisältö Erilaiset generaattorityypit Sähköntuotannossa käytetyt generaattorityypit Verkkomagnetoitu epätahtigeneraattori Kondensaattorimagnetoitu
Servo-case, tilanne 16.9.2005
 Servo-case, tilanne.9.25 Jari Halme Tutkija jari.halme@vtt.fi Case: Servomoottorin toimintakunnon valvonta ja testaus Vastuullinen yritys ja vastuuhenkilö: Kimmo Ukkonen, Foxconn Oy Muut osallistuvat yritykset:
Servo-case, tilanne.9.25 Jari Halme Tutkija jari.halme@vtt.fi Case: Servomoottorin toimintakunnon valvonta ja testaus Vastuullinen yritys ja vastuuhenkilö: Kimmo Ukkonen, Foxconn Oy Muut osallistuvat yritykset:
Yleistä ebmpapst-puhaltimista - Kuvaus teknisistä tiedoista AC
 Yleistä ebmpapst-puhaltimista - Kuvaus teknisistä tiedoista AC ULKOROOTTORIMOOTTORI Ulkoroottorimoottorin toimintaperiaate - esimerkkinä keskipakopuhallin eteenpäin kaartuvin siivin. Ulkoroottorimoottorissa
Yleistä ebmpapst-puhaltimista - Kuvaus teknisistä tiedoista AC ULKOROOTTORIMOOTTORI Ulkoroottorimoottorin toimintaperiaate - esimerkkinä keskipakopuhallin eteenpäin kaartuvin siivin. Ulkoroottorimoottorissa
FYSP105/2 VAIHTOVIRTAKOMPONENTIT. 1 Johdanto. 2 Teoreettista taustaa
 FYSP105/2 VAIHTOVIRTAKOMPONENTIT Työn tavoitteita o Havainnollistaa vaihtovirtapiirien toimintaa o Syventää ymmärtämystä aiheeseen liittyvästä fysiikasta 1 Johdanto Tasavirta oli 1900 luvun alussa kilpaileva
FYSP105/2 VAIHTOVIRTAKOMPONENTIT Työn tavoitteita o Havainnollistaa vaihtovirtapiirien toimintaa o Syventää ymmärtämystä aiheeseen liittyvästä fysiikasta 1 Johdanto Tasavirta oli 1900 luvun alussa kilpaileva
FYSP105/2 VAIHTOVIRTAKOMPONENTIT. 1 Johdanto
 FYSP105/2 VAIHTOVIRTAKOMPONENTIT Työn tavoitteet o Havainnollistaa vaihtovirtapiirien toimintaa o Syventää ymmärtämystä aiheeseen liittyvästä fysiikasta 1 Johdanto Tasavirta oli 1900 luvun alussa kilpaileva
FYSP105/2 VAIHTOVIRTAKOMPONENTIT Työn tavoitteet o Havainnollistaa vaihtovirtapiirien toimintaa o Syventää ymmärtämystä aiheeseen liittyvästä fysiikasta 1 Johdanto Tasavirta oli 1900 luvun alussa kilpaileva
Antti Vuorivirta, ABB Oy Kotimaan myynti, SSTY Sairaalatekniikan päivät, 12.2.2014. Uudet sähkömoottoritekniikat energiasäästöjen tuojana
 Antti Vuorivirta, ABB Oy Kotimaan myynti, SSTY Sairaalatekniikan päivät, 12.2.2014 Uudet sähkömoottoritekniikat energiasäästöjen tuojana Sisällys Moottoreiden hyötysuhde Oikosulkumoottori Tahtireluktanssimoottori
Antti Vuorivirta, ABB Oy Kotimaan myynti, SSTY Sairaalatekniikan päivät, 12.2.2014 Uudet sähkömoottoritekniikat energiasäästöjen tuojana Sisällys Moottoreiden hyötysuhde Oikosulkumoottori Tahtireluktanssimoottori
Käytännön radiotekniikkaa: Epälineaarinen komponentti ja signaalien siirtely taajuusalueessa (+ laboratoriotyön 2 esittely)
") Käytännön radiotekniikkaa: Epälineaarinen komponentti ja signaalien siirtely taajuusalueessa (+ laboratoriotyön 2 esittely) ELEC-C5070 Elektroniikkapaja, 21.9.2015 Huom: Kurssissa on myöhemmin erikseen
Käytännön radiotekniikkaa: Epälineaarinen komponentti ja signaalien siirtely taajuusalueessa (+ laboratoriotyön 2 esittely) ELEC-C5070 Elektroniikkapaja, 21.9.2015 Huom: Kurssissa on myöhemmin erikseen
33 SOLENOIDIN JA TOROIDIN MAGNEETTIKENTTÄ
 TYÖOHJE 14.7.2010 JMK, TSU 33 SOLENOIDIN JA TOROIDIN MAGNEETTIKENTTÄ Laitteisto: Kuva 1. Kytkentä solenoidin ja toroidin magneettikenttien mittausta varten. Käytä samaa digitaalista jännitemittaria molempien
TYÖOHJE 14.7.2010 JMK, TSU 33 SOLENOIDIN JA TOROIDIN MAGNEETTIKENTTÄ Laitteisto: Kuva 1. Kytkentä solenoidin ja toroidin magneettikenttien mittausta varten. Käytä samaa digitaalista jännitemittaria molempien
SVE SVE/PLUS KESKIPAKOPUHALTIMET JA INLINE IMURIT
 /PLUS : Matalan melutason inline imurit asennettu akustisen kotelon sisään. /PLUS: Matalan melutason inline imurit asennettu akustiseen koteloon, jossa on 40 mm ääntä vaimentava eriste. Puhallin: Akustinen
/PLUS : Matalan melutason inline imurit asennettu akustisen kotelon sisään. /PLUS: Matalan melutason inline imurit asennettu akustiseen koteloon, jossa on 40 mm ääntä vaimentava eriste. Puhallin: Akustinen
DEE Tuulivoiman perusteet
 Viidennen luennon aihepiirit Tuulivoimaloiden generaattorit Toimintaperiaate Tahtigeneraattori Epätahtigeneraattori Tuulivoimalakonseptit 1 YLEISTÄ ASIAA GENERAATTOREISTA Generaattori on laite, joka muuttaa
Viidennen luennon aihepiirit Tuulivoimaloiden generaattorit Toimintaperiaate Tahtigeneraattori Epätahtigeneraattori Tuulivoimalakonseptit 1 YLEISTÄ ASIAA GENERAATTOREISTA Generaattori on laite, joka muuttaa
VAIHTOVIRTAPIIRI. 1 Työn tavoitteet
 Oulun yliopisto Fysiikan opetuslaboratorio Sähkö- ja magnetismiopin laboratoriotyöt AHTOTAP Työn tavoitteet aihtovirran ja jännitteen suunta vaihtelee ajan funktiona. Esimerkiksi Suomessa käytettävä verkkovirta
Oulun yliopisto Fysiikan opetuslaboratorio Sähkö- ja magnetismiopin laboratoriotyöt AHTOTAP Työn tavoitteet aihtovirran ja jännitteen suunta vaihtelee ajan funktiona. Esimerkiksi Suomessa käytettävä verkkovirta
Pinces AC-virtapihdit ampèremetriques pour courant AC
 Pinces AC-virtapihdit ampèremetriques pour courant AC MINI-SARJA Pienikokoinen, kompakti sekä erittäin kestävä minipihtisarja on suunniteltu mittaamaan virtoja muutamasta milliampeerista jopa 150 A AC
Pinces AC-virtapihdit ampèremetriques pour courant AC MINI-SARJA Pienikokoinen, kompakti sekä erittäin kestävä minipihtisarja on suunniteltu mittaamaan virtoja muutamasta milliampeerista jopa 150 A AC
Jatkuvatoiminen monitorointi vs. vuosittainen näytteenotto
 Jatkuvatoiminen monitorointi vs. vuosittainen näytteenotto Teemu Auronen Muuntajan vikaantumiseen johtavia seikkoja Vikatilanteen estämiseksi, kehittyvien vikojen tunnistaminen on elinarvoisen tärkeää.
Jatkuvatoiminen monitorointi vs. vuosittainen näytteenotto Teemu Auronen Muuntajan vikaantumiseen johtavia seikkoja Vikatilanteen estämiseksi, kehittyvien vikojen tunnistaminen on elinarvoisen tärkeää.
Mittalaitetekniikka. NYMTES13 Vaihtosähköpiirit Jussi Hurri syksy 2014
 Mittalaitetekniikka NYMTES13 Vaihtosähköpiirit Jussi Hurri syksy 2014 1 1. VAIHTOSÄHKÖ, PERUSKÄSITTEITÄ AC = Alternating current Jatkossa puhutaan vaihtojännitteestä. Yhtä hyvin voitaisiin tarkastella
Mittalaitetekniikka NYMTES13 Vaihtosähköpiirit Jussi Hurri syksy 2014 1 1. VAIHTOSÄHKÖ, PERUSKÄSITTEITÄ AC = Alternating current Jatkossa puhutaan vaihtojännitteestä. Yhtä hyvin voitaisiin tarkastella
LOPPURAPORTTI 19.11.2007. Lämpötilahälytin. 0278116 Hans Baumgartner xxxxxxx nimi nimi
 LOPPURAPORTTI 19.11.2007 Lämpötilahälytin 0278116 Hans Baumgartner xxxxxxx nimi nimi KÄYTETYT MERKINNÄT JA LYHENTEET... 3 JOHDANTO... 4 1. ESISELOSTUS... 5 1.1 Diodi anturina... 5 1.2 Lämpötilan ilmaisu...
LOPPURAPORTTI 19.11.2007 Lämpötilahälytin 0278116 Hans Baumgartner xxxxxxx nimi nimi KÄYTETYT MERKINNÄT JA LYHENTEET... 3 JOHDANTO... 4 1. ESISELOSTUS... 5 1.1 Diodi anturina... 5 1.2 Lämpötilan ilmaisu...
Kojemeteorologia (53695) Laskuharjoitus 1
 Laskuharjoitus 1") Kojemeteorologia (53695) Laskuharjoitus 1 Risto Taipale 20.9.2013 1 Tehtävä 1 Erään lämpömittarin vertailu kalibrointistandardiin antoi keskimääräiseksi eroksi standardista 0,98 C ja eron keskihajonnaksi
Kojemeteorologia (53695) Laskuharjoitus 1 Risto Taipale 20.9.2013 1 Tehtävä 1 Erään lämpömittarin vertailu kalibrointistandardiin antoi keskimääräiseksi eroksi standardista 0,98 C ja eron keskihajonnaksi
Harmonisten yliaaltojen vaikutus johtojen mitoitukseen
 Harmonisten yliaaltojen vaikutus johtojen mitoitukseen Pienjännitesähköasennukset standardin osassa SFS6000-5-5 esitetään johtojen mitoitusperusteet johtimien ja kaapelien kuormitettavuudelle. Lähtökohtana
Harmonisten yliaaltojen vaikutus johtojen mitoitukseen Pienjännitesähköasennukset standardin osassa SFS6000-5-5 esitetään johtojen mitoitusperusteet johtimien ja kaapelien kuormitettavuudelle. Lähtökohtana
Aiheena tänään. Virtasilmukka magneettikentässä Sähkömagneettinen induktio. Vaihtovirtageneraattorin toimintaperiaate Itseinduktio
 Sähkömagnetismi 2 Aiheena tänään Virtasilmukka magneettikentässä Sähkömagneettinen induktio Vaihtovirtageneraattorin toimintaperiaate Itseinduktio Käämiin vaikuttava momentti Magneettikentässä olevaan
Sähkömagnetismi 2 Aiheena tänään Virtasilmukka magneettikentässä Sähkömagneettinen induktio Vaihtovirtageneraattorin toimintaperiaate Itseinduktio Käämiin vaikuttava momentti Magneettikentässä olevaan
Nimi: Muiden ryhmäläisten nimet:
 Nimi: Muiden ryhmäläisten nimet: PALKKIANTURI Työssä tutustutaan palkkianturin toimintaan ja havainnollistetaan sen avulla pienten ainepitoisuuksien havainnointia. Työn mittaukset on jaettu kolmeen osaan,
Nimi: Muiden ryhmäläisten nimet: PALKKIANTURI Työssä tutustutaan palkkianturin toimintaan ja havainnollistetaan sen avulla pienten ainepitoisuuksien havainnointia. Työn mittaukset on jaettu kolmeen osaan,
FYS206/5 Vaihtovirtakomponentit
 FYS206/5 Vaihtovirtakomponentit Tässä työssä pyritään syventämään vaihtovirtakomponentteihin liittyviä käsitteitä. Tunnetusti esimerkiksi käsitteet impedanssi, reaktanssi ja vaihesiirto ovat aina hyvin
FYS206/5 Vaihtovirtakomponentit Tässä työssä pyritään syventämään vaihtovirtakomponentteihin liittyviä käsitteitä. Tunnetusti esimerkiksi käsitteet impedanssi, reaktanssi ja vaihesiirto ovat aina hyvin
Johdatus vaihtosähköön, sinimuotoiset suureet. DEE Piirianalyysi Risto Mikkonen
 DEE-11000 Piirianalyysi Johdatus vaihtosähköön, sinimuotoiset suureet 1 Vaihtovirta vs tasavirta Sähkömagneettinen induktio tuottaa kaikissa pyörivissä generaattoreissa vaihtojännitettä. Vaihtosähköä on
DEE-11000 Piirianalyysi Johdatus vaihtosähköön, sinimuotoiset suureet 1 Vaihtovirta vs tasavirta Sähkömagneettinen induktio tuottaa kaikissa pyörivissä generaattoreissa vaihtojännitettä. Vaihtosähköä on
TDC-SD TDC-ANTURI RMS-SD MITTAUSJÄRJESTELMÄLLE KÄSIKIRJA. TDC-SD_Fin.doc 2008-02-01 / BL 1(5)
") TDC-ANTURI RMS-SD MITTAUSJÄRJESTELMÄLLE KÄSIKIRJA _Fin.doc 2008-02-01 / BL 1(5) SISÄLTÖ 1. TEKNISET TIEDOT 2. MALLIN KUVAUS 3. TOIMINNON KUVAUS 4. UUDELLEENKÄYTTÖOHJEET 5. KÄÄMITYKSEN TARKASTUS 1. TEKNISET
TDC-ANTURI RMS-SD MITTAUSJÄRJESTELMÄLLE KÄSIKIRJA _Fin.doc 2008-02-01 / BL 1(5) SISÄLTÖ 1. TEKNISET TIEDOT 2. MALLIN KUVAUS 3. TOIMINNON KUVAUS 4. UUDELLEENKÄYTTÖOHJEET 5. KÄÄMITYKSEN TARKASTUS 1. TEKNISET
Tiedonkeruu ja analysointi
 Tiedonkeruu ja analysointi ViDRoM Virtual Design of Rotating Machines Raine Viitala ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat laakerit,
Tiedonkeruu ja analysointi ViDRoM Virtual Design of Rotating Machines Raine Viitala ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat laakerit,
HYDRAULIIKAN PERUSTEET JA PUMPUN SUORITUSKYKY PUMPUN SUORITUSKYVYN HEIKKENEMISEEN VAIKUTTAVAT TEKIJÄT
 HYDRAULIIKAN PERUSTEET JA PUMPUN SUORITUSKYKY PUMPUN SUORITUSKYVYN HEIKKENEMISEEN VAIKUTTAVAT TEKIJÄT Hyötysuhteen heikkenemiseen vaikuttavat tekijät Pumpun hyötysuhde voi heiketä näistä syistä: Kavitaatio
HYDRAULIIKAN PERUSTEET JA PUMPUN SUORITUSKYKY PUMPUN SUORITUSKYVYN HEIKKENEMISEEN VAIKUTTAVAT TEKIJÄT Hyötysuhteen heikkenemiseen vaikuttavat tekijät Pumpun hyötysuhde voi heiketä näistä syistä: Kavitaatio
Pinces AC-virtapihti ampèremetriques pour courant AC
 Pinces AC-virtapihti ampèremetriques pour courant AC MN-sarja Serie MN-SARJA Nämä ergonomiset mini-pihdit ovat sunniteltu matalien ja keskisuurien virtojen mittaamiseen välillä 0,01 A ja 240 A AC. Leukojen
Pinces AC-virtapihti ampèremetriques pour courant AC MN-sarja Serie MN-SARJA Nämä ergonomiset mini-pihdit ovat sunniteltu matalien ja keskisuurien virtojen mittaamiseen välillä 0,01 A ja 240 A AC. Leukojen
Mitä on huomioitava kaasupäästöjen virtausmittauksissa
 Mitä on huomioitava kaasupäästöjen virtausmittauksissa Luotettavuutta päästökauppaan liittyviin mittauksiin 21.8.2006 Paula Juuti 2 Kaupattavien päästöjen määrittäminen Toistaiseksi CO2-päästömäärät perustuvat
Mitä on huomioitava kaasupäästöjen virtausmittauksissa Luotettavuutta päästökauppaan liittyviin mittauksiin 21.8.2006 Paula Juuti 2 Kaupattavien päästöjen määrittäminen Toistaiseksi CO2-päästömäärät perustuvat
Kiinteistötekniikkaratkaisut
 Kiinteistötekniikkaratkaisut SmartFinn AUTOMAATIO SmartFinn Automaatio on aidosti helppokäyttöinen järjestelmä, joka tarjoaa kaikki automaatiotoiminnot yhden yhteisen käyttöliittymän kautta. Kattavat asuntokohtaiset
Kiinteistötekniikkaratkaisut SmartFinn AUTOMAATIO SmartFinn Automaatio on aidosti helppokäyttöinen järjestelmä, joka tarjoaa kaikki automaatiotoiminnot yhden yhteisen käyttöliittymän kautta. Kattavat asuntokohtaiset
KÄYTTÖOHJE - INVERTTERI 12V tai 24V -> 230V 55Hz
 KÄYTTÖOHJE - INVERTTERI 12V tai 24V -> 230V 55Hz G-12-015, G-12-030, G-12-060 G-24-015, G-24-030, G-24-060 1. Laitteen kuvaus Virta päällä merkkivalo Virhe-merkkivalo (ylikuormitus, alhainen/korkea akun
KÄYTTÖOHJE - INVERTTERI 12V tai 24V -> 230V 55Hz G-12-015, G-12-030, G-12-060 G-24-015, G-24-030, G-24-060 1. Laitteen kuvaus Virta päällä merkkivalo Virhe-merkkivalo (ylikuormitus, alhainen/korkea akun
10 SÄHKÖKONEET, osa 1
 10 SÄHKÖKONEET, osa 1 10.1 Yleistä 10.1.1 Konetyypit ja niiden perusosat Sähkökoneet muuttavat energiaa muodosta toiseen. Moottorit muuttavat niihin syötettyä sähköenergiaa mekaaniseksi energiaksi ja generaattorit
10 SÄHKÖKONEET, osa 1 10.1 Yleistä 10.1.1 Konetyypit ja niiden perusosat Sähkökoneet muuttavat energiaa muodosta toiseen. Moottorit muuttavat niihin syötettyä sähköenergiaa mekaaniseksi energiaksi ja generaattorit
Infraäänimittaukset. DI Antti Aunio, Aunio Group Oy
 Infraäänimittaukset DI Antti Aunio, Aunio Group Oy antti.aunio@aunio.fi Mitä infraääni on? Matalataajuista ilmanpaineen vaihtelua Taajuusalue < 20 Hz Ihmisen kuuloalue on tyypillisesti 20-20 000 Hz Osa
Infraäänimittaukset DI Antti Aunio, Aunio Group Oy antti.aunio@aunio.fi Mitä infraääni on? Matalataajuista ilmanpaineen vaihtelua Taajuusalue < 20 Hz Ihmisen kuuloalue on tyypillisesti 20-20 000 Hz Osa
Pinces AC/DC-virtapihti ampèremetriques pour courant AC
 MH-SARJA MH60-virtapihti on suunniteltu mittaamaan DC ja AC-virtoja jopa 1 MHz:n kaistanleveydellä, käyttäen kaksoislineaarista Hall-ilmiötä/ Muuntajateknologiaa. Pihti sisältää ladattavan NiMh-akun, jonka
MH-SARJA MH60-virtapihti on suunniteltu mittaamaan DC ja AC-virtoja jopa 1 MHz:n kaistanleveydellä, käyttäen kaksoislineaarista Hall-ilmiötä/ Muuntajateknologiaa. Pihti sisältää ladattavan NiMh-akun, jonka
Servo-case, tutkijaseminaari
 , tutkijaseminaari 20.5.2005 Jari Halme Tutkija jari.halme@vtt.fi Sisältö Servomoottori-case diagnostiikkaa ja prognostiikkaa varten Haasteita 2 Case: Servomoottorin toimintakunnon valvonta ja testaus
, tutkijaseminaari 20.5.2005 Jari Halme Tutkija jari.halme@vtt.fi Sisältö Servomoottori-case diagnostiikkaa ja prognostiikkaa varten Haasteita 2 Case: Servomoottorin toimintakunnon valvonta ja testaus
Taustamateriaali Fingridin innovaatiohaasteeseen Sähköasemilla olevien viallisten laitteiden havainnointi radiotaajuisella mittausmenetelmällä
 Taustamateriaali Fingridin innovaatiohaasteeseen Sähköasemilla olevien viallisten laitteiden havainnointi radiotaajuisella mittausmenetelmällä Juha Riikonen Spinverse Yleistä lisätietoa Yleistä lisätietoa
Taustamateriaali Fingridin innovaatiohaasteeseen Sähköasemilla olevien viallisten laitteiden havainnointi radiotaajuisella mittausmenetelmällä Juha Riikonen Spinverse Yleistä lisätietoa Yleistä lisätietoa
S-108.3020 Elektroniikan häiriökysymykset. Laboratoriotyö, kevät 2010
 1/7 S-108.3020 Elektroniikan häiriökysymykset Laboratoriotyö, kevät 2010 Häiriöiden kytkeytyminen yhteisen impedanssin kautta lämpötilasäätimessä Viimeksi päivitetty 25.2.2010 / MO 2/7 Johdanto Sähköisiä
1/7 S-108.3020 Elektroniikan häiriökysymykset Laboratoriotyö, kevät 2010 Häiriöiden kytkeytyminen yhteisen impedanssin kautta lämpötilasäätimessä Viimeksi päivitetty 25.2.2010 / MO 2/7 Johdanto Sähköisiä
Radioamatöörikurssi 2018
 Radioamatöörikurssi 2018 Häiriöt Ukkossuojaus Harhalähetteet 27.11.2018 Tatu, OH2EAT 1 / 15 Esimerkkejä häiriöiden ilmenemisestä Ylimääräinen taustakohina radiovastaanottimessa Muut sähkölaitteet häiriintyvät
Radioamatöörikurssi 2018 Häiriöt Ukkossuojaus Harhalähetteet 27.11.2018 Tatu, OH2EAT 1 / 15 Esimerkkejä häiriöiden ilmenemisestä Ylimääräinen taustakohina radiovastaanottimessa Muut sähkölaitteet häiriintyvät
Agenda. Johdanto Säätäjiä. Mittaaminen. P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen
 8. Luento: Laitteiston ohjaaminen Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen Johdanto Tavoitteena: tunnistaa
8. Luento: Laitteiston ohjaaminen Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen Johdanto Tavoitteena: tunnistaa
Signaalien generointi
 Signaalinkäsittelyssä joudutaan usein generoimaan erilaisia signaaleja keinotekoisesti. Tyypillisimpiä generoitavia aaltomuotoja ovat eritaajuiset sinimuotoiset signaalit (modulointi) sekä normaalijakautunut
Signaalinkäsittelyssä joudutaan usein generoimaan erilaisia signaaleja keinotekoisesti. Tyypillisimpiä generoitavia aaltomuotoja ovat eritaajuiset sinimuotoiset signaalit (modulointi) sekä normaalijakautunut
Kurssit 2015. Ennakoivan kunnossapidon kurssit ammattilaisille
 Kurssit 2015 Ennakoivan kunnossapidon kurssit ammattilaisille Kurssit 2015 Ennakoivan kunnossapidon kurssit ammattilaisille Sisältö Pyörivien koneiden linjauskoulutus... 3 Värähtelymittaus ja analysointi...
Kurssit 2015 Ennakoivan kunnossapidon kurssit ammattilaisille Kurssit 2015 Ennakoivan kunnossapidon kurssit ammattilaisille Sisältö Pyörivien koneiden linjauskoulutus... 3 Värähtelymittaus ja analysointi...
Kapasitiivinen ja induktiivinen kytkeytyminen
 Kapasitiivinen ja induktiivinen kytkeytyminen EMC - Kaapelointi ja kytkeytyminen Kaapelointi merkittävä EMC-ominaisuuksien kannalta yleensä pituudeltaan suurin elektroniikan osa > toimii helposti antennina
Kapasitiivinen ja induktiivinen kytkeytyminen EMC - Kaapelointi ja kytkeytyminen Kaapelointi merkittävä EMC-ominaisuuksien kannalta yleensä pituudeltaan suurin elektroniikan osa > toimii helposti antennina
Radioamatöörikurssi 2016
 Radioamatöörikurssi 2016 Häiriöt Ukkossuojaus Harhalähetteet 22.11.2016 Tatu, OH2EAT 1 / 16 Häiriöt Ei-toivottu signaali jossain Yleinen ongelma radioamatöörille sekä lähetyksessä että vastaanotossa 2
Radioamatöörikurssi 2016 Häiriöt Ukkossuojaus Harhalähetteet 22.11.2016 Tatu, OH2EAT 1 / 16 Häiriöt Ei-toivottu signaali jossain Yleinen ongelma radioamatöörille sekä lähetyksessä että vastaanotossa 2
Dynatel 2210E kaapelinhakulaite
 Dynatel 2210E kaapelinhakulaite Syyskuu 2001 KÄYTTÖOHJE Yleistä 3M Dynatel 2210E kaapelinhakulaite koostuu lähettimestä, vastaanottimesta ja tarvittavista johdoista. Laitteella voidaan paikantaa kaapeleita
Dynatel 2210E kaapelinhakulaite Syyskuu 2001 KÄYTTÖOHJE Yleistä 3M Dynatel 2210E kaapelinhakulaite koostuu lähettimestä, vastaanottimesta ja tarvittavista johdoista. Laitteella voidaan paikantaa kaapeleita
Pinces AC/DC-virtapihdit ampèremetriques pour courant AC
 Pinces AC/DC-virtapihdit ampèremetriques pour courant AC E N- SARJA E N -sarjan virtapihdit hyödyntävät Hall-ilmiöön perustuvaa tekniikkaa AC ja DC -virtojen mittauksessa, muutamasta milliamperista yli
Pinces AC/DC-virtapihdit ampèremetriques pour courant AC E N- SARJA E N -sarjan virtapihdit hyödyntävät Hall-ilmiöön perustuvaa tekniikkaa AC ja DC -virtojen mittauksessa, muutamasta milliamperista yli
BIOSÄHKÖISET MITTAUKSET
 TEKSTIN NIMI sivu 1 / 1 BIOSÄHKÖISET MITTAUKSET ELEKTROENKEFALOGRAFIA EEG Elektroenkegfalografialla tarkoitetaan aivojen sähköisen toiminnan rekisteröintiä. Mittaus tapahtuu tavallisesti ihon pinnalta,
TEKSTIN NIMI sivu 1 / 1 BIOSÄHKÖISET MITTAUKSET ELEKTROENKEFALOGRAFIA EEG Elektroenkegfalografialla tarkoitetaan aivojen sähköisen toiminnan rekisteröintiä. Mittaus tapahtuu tavallisesti ihon pinnalta,
Radioamatöörikurssi 2013
 Radioamatöörikurssi 2013 Polyteknikkojen Radiokerho Putket, häiriöt 19.11.2013 Tatu, OH2EAT 1 / 20 Putket Ensimmäisiä vahvistinkomponentteja, ei juuri käytetä enää nykyään Edelleen käytössä mm. suuritehoisissa
Radioamatöörikurssi 2013 Polyteknikkojen Radiokerho Putket, häiriöt 19.11.2013 Tatu, OH2EAT 1 / 20 Putket Ensimmäisiä vahvistinkomponentteja, ei juuri käytetä enää nykyään Edelleen käytössä mm. suuritehoisissa
Radioamatöörikurssi 2015
 Radioamatöörikurssi 2015 Polyteknikkojen Radiokerho Putket, häiriöt 17.11.2015 Tatu, OH2EAT 1 / 19 Putket Ensimmäisiä vahvistinkomponentteja, ei juuri käytetä enää nykyään Edelleen käytössä mm. suuritehoisissa
Radioamatöörikurssi 2015 Polyteknikkojen Radiokerho Putket, häiriöt 17.11.2015 Tatu, OH2EAT 1 / 19 Putket Ensimmäisiä vahvistinkomponentteja, ei juuri käytetä enää nykyään Edelleen käytössä mm. suuritehoisissa
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA. Jouko Esko n85748 Juho Jaakkola n86633. Dynaaminen Kenttäteoria GENERAATTORI.
 VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Jouko Esko n85748 Juho Jaakkola n86633 Dynaaminen Kenttäteoria GENERAATTORI Sivumäärä: 10 Jätetty tarkastettavaksi: 06.03.2008 Työn tarkastaja Maarit
VAASAN YLIOPISTO TEKNILLINEN TIEDEKUNTA SÄHKÖTEKNIIKKA Jouko Esko n85748 Juho Jaakkola n86633 Dynaaminen Kenttäteoria GENERAATTORI Sivumäärä: 10 Jätetty tarkastettavaksi: 06.03.2008 Työn tarkastaja Maarit
Tasavirtakäyttö. 1 Esiselostus. TEL-1400 Sähkömoottorikäyttöjen laboratoriotyöt
 Tasavirtakäyttö 1 Esiselostus 1.1 Mitä laitteita kuuluu Leonard-käyttöön, mikä on sen toimintaperiaate ja mihin ja miksi niitä käytetään? Luettele myös Leonard-käytön etuja ja haittoja. Kuva 1.1 Leonard-käyttö.
Tasavirtakäyttö 1 Esiselostus 1.1 Mitä laitteita kuuluu Leonard-käyttöön, mikä on sen toimintaperiaate ja mihin ja miksi niitä käytetään? Luettele myös Leonard-käytön etuja ja haittoja. Kuva 1.1 Leonard-käyttö.
Radioamatöörikurssi 2014
 Radioamatöörikurssi 2014 Polyteknikkojen Radiokerho Putket, häiriöt, sähköturvallisuus 13.11.2014 Tatu, OH2EAT 1 / 18 Putket Ensimmäisiä vahvistinkomponentteja, ei juuri käytetä enää nykyään Edelleen käytössä
Radioamatöörikurssi 2014 Polyteknikkojen Radiokerho Putket, häiriöt, sähköturvallisuus 13.11.2014 Tatu, OH2EAT 1 / 18 Putket Ensimmäisiä vahvistinkomponentteja, ei juuri käytetä enää nykyään Edelleen käytössä
Eristysvastuksen mittaus
 Eristysvastuksen mittaus Miksi eristyvastusmittauksia tehdään? Eristysvastuksen kunnon tarkastamista suositellaan vahvasti sähköiskujen ennaltaehkäisemiseksi. Mittausten suorittaminen lisää käyttöturvallisuutta
Eristysvastuksen mittaus Miksi eristyvastusmittauksia tehdään? Eristysvastuksen kunnon tarkastamista suositellaan vahvasti sähköiskujen ennaltaehkäisemiseksi. Mittausten suorittaminen lisää käyttöturvallisuutta
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
Koesuunnitelma. ViDRoM Virtual Design of Rotating Machines. Raine Viitala
 Koesuunnitelma ViDRoM Virtual Design of Rotating Machines Raine Viitala ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat laakerit, kolmikulmaiset
Koesuunnitelma ViDRoM Virtual Design of Rotating Machines Raine Viitala ViDRoM Virtual Design of Rotating Machines Mitataan dynaamista käyttäytymistä -> nopeuden funktiona Puhtaat laakerit, kolmikulmaiset
Paperikoneiden vierintälaakerien kunnonvalvontamenetelmät
 Paperikoneiden vierintälaakerien kunnonvalvontamenetelmät Raportti BVAL73-001006 Mikko Mustonen Espoo, 1.8.2000 VALMISTUSTEKNIIKKA 1(23) Raportin nimi Paperikoneiden vierintälaakerien kunnonvalvontamenetelmät
Paperikoneiden vierintälaakerien kunnonvalvontamenetelmät Raportti BVAL73-001006 Mikko Mustonen Espoo, 1.8.2000 VALMISTUSTEKNIIKKA 1(23) Raportin nimi Paperikoneiden vierintälaakerien kunnonvalvontamenetelmät
SMG-2100: SÄHKÖTEKNIIKKA
 Vaihtosähkö SMG-2100: SÄHKÖTEKNIIKKA Sinimuotoiset suureet Tehollisarvo Sinimuotoinen vaihtosähkö & passiiviset piirikomponentit Käydään läpi, mistä sinimuotoiset jännite ja virta ovat peräisin. Näytetään,
Vaihtosähkö SMG-2100: SÄHKÖTEKNIIKKA Sinimuotoiset suureet Tehollisarvo Sinimuotoinen vaihtosähkö & passiiviset piirikomponentit Käydään läpi, mistä sinimuotoiset jännite ja virta ovat peräisin. Näytetään,
IMPEDANSSIMITTAUKSIA. 1 Työn tavoitteet
 1 IMPEDANSSIMITTAUKSIA 1 Työn tavoitteet Tässä työssä tutustut vaihtojännitteiden ja virtojen sekä vaihtovirtapiirissä olevien komponenttien impedanssien suuruuksien eli vaihtovirtavastusten mittaamiseen.
1 IMPEDANSSIMITTAUKSIA 1 Työn tavoitteet Tässä työssä tutustut vaihtojännitteiden ja virtojen sekä vaihtovirtapiirissä olevien komponenttien impedanssien suuruuksien eli vaihtovirtavastusten mittaamiseen.
KYTKENTÄOHJEET. MicroMax370
 KYTKENTÄOHJEET ROTAATIOLÄMMÖNVAIHTIMEN OHJAUSYKSIKKÖ MicroMax370 Tarkistettu 04-12-13 1.1 F21037902FI Valmistajan seloste Valmistajan vakuutus siitä, että tuote on EMC-DIREKTIIVIN 89/336/EEG ja sen lisäysten
KYTKENTÄOHJEET ROTAATIOLÄMMÖNVAIHTIMEN OHJAUSYKSIKKÖ MicroMax370 Tarkistettu 04-12-13 1.1 F21037902FI Valmistajan seloste Valmistajan vakuutus siitä, että tuote on EMC-DIREKTIIVIN 89/336/EEG ja sen lisäysten
SMG-1100: PIIRIANALYYSI I
 SMG-1100: PIIRIANALYYSI I Keskinäisinduktanssi induktiivisesti kytkeytyneet komponentit muuntajan toimintaperiaate T-sijaiskytkentä kytketyn piirin energia KESKINÄISINDUKTANSSI M Faraday: magneettikentän
SMG-1100: PIIRIANALYYSI I Keskinäisinduktanssi induktiivisesti kytkeytyneet komponentit muuntajan toimintaperiaate T-sijaiskytkentä kytketyn piirin energia KESKINÄISINDUKTANSSI M Faraday: magneettikentän
TEKNILLINEN TIEDEKUNTA KUNNONVALVONNAN VÄRÄHTELYMITTAUKSET. Olli Vuokila
 TEKNILLINEN TIEDEKUNTA KUNNONVALVONNAN VÄRÄHTELYMITTAUKSET Olli Vuokila KONETEKNIIKAN TUTKINTO-OHJELMA Kandidaatintyö 2017 TIIVISTELMÄ Kunnonvalvonnan värähtelymittaukset Olli Vuokila Oulun yliopisto,
TEKNILLINEN TIEDEKUNTA KUNNONVALVONNAN VÄRÄHTELYMITTAUKSET Olli Vuokila KONETEKNIIKAN TUTKINTO-OHJELMA Kandidaatintyö 2017 TIIVISTELMÄ Kunnonvalvonnan värähtelymittaukset Olli Vuokila Oulun yliopisto,
Verkkodatalehti. DFS60I-S1AC02500 DFS60 Inox PULSSIANTURI
 Verkkodatalehti DFS60I-S102500 DFS60 Inox DFS60I-S102500 DFS60 Inox B D E F H I J K L M N O P Q R S T Esimerkkikuva Yksityiskohtaiset tekniset tiedot Suorituskyky Tilaustiedot Tyyppi Muita laiteversioita
Verkkodatalehti DFS60I-S102500 DFS60 Inox DFS60I-S102500 DFS60 Inox B D E F H I J K L M N O P Q R S T Esimerkkikuva Yksityiskohtaiset tekniset tiedot Suorituskyky Tilaustiedot Tyyppi Muita laiteversioita
VIM RM1 VAL0123136 / SKC9068201 VIBRATION MONITOR RMS-MITTAUSJÄRJESTELMÄLLE KÄSIKIRJA. VIM-RM1 FI.docx 1998-06-04 / BL 1(5)
") VIM RM1 VAL0123136 / SKC9068201 VIBRATION MONITOR RMS-MITTAUSJÄRJESTELMÄLLE KÄSIKIRJA FI.docx 1998-06-04 / BL 1(5) SISÄLTÖ 1. KOMPONENTTIEN SIJAINTI 2. TOIMINNAN KUVAUS 3. TEKNISET TIEDOT 4. SÄÄTÖ 5. KALIBROINTI
VIM RM1 VAL0123136 / SKC9068201 VIBRATION MONITOR RMS-MITTAUSJÄRJESTELMÄLLE KÄSIKIRJA FI.docx 1998-06-04 / BL 1(5) SISÄLTÖ 1. KOMPONENTTIEN SIJAINTI 2. TOIMINNAN KUVAUS 3. TEKNISET TIEDOT 4. SÄÄTÖ 5. KALIBROINTI
LABORATORIOTYÖ 3 VAIHELUKITTU VAHVISTIN
 LABORATORIOTYÖ 3 VAIHELUKITTU VAHVISTIN Päivitetty: 23/01/2009 TP 3-1 3. VAIHELUKITTU VAHVISTIN Työn tavoitteet Työn tavoitteena on oppia vaihelukitun vahvistimen toimintaperiaate ja käyttömahdollisuudet
LABORATORIOTYÖ 3 VAIHELUKITTU VAHVISTIN Päivitetty: 23/01/2009 TP 3-1 3. VAIHELUKITTU VAHVISTIN Työn tavoitteet Työn tavoitteena on oppia vaihelukitun vahvistimen toimintaperiaate ja käyttömahdollisuudet
6. Analogisen signaalin liittäminen mikroprosessoriin 2 6.1 Näytteenotto analogisesta signaalista 2 6.2. DA-muuntimet 4
 Datamuuntimet 1 Pekka antala 19.11.2012 Datamuuntimet 6. Analogisen signaalin liittäminen mikroprosessoriin 2 6.1 Näytteenotto analogisesta signaalista 2 6.2. DA-muuntimet 4 7. AD-muuntimet 5 7.1 Analoginen
Datamuuntimet 1 Pekka antala 19.11.2012 Datamuuntimet 6. Analogisen signaalin liittäminen mikroprosessoriin 2 6.1 Näytteenotto analogisesta signaalista 2 6.2. DA-muuntimet 4 7. AD-muuntimet 5 7.1 Analoginen
ROD -tyypin Sulkusyötin
 Standardi: Q/HFJ02027-2000 ROD -tyypin Sulkusyötin KÄYTTÖOHJE Suomen Imurikeskus Oy Puh. 02-576 700-1 - SISÄLTÖ 1. RAKENNE... 3 2. TOIMINTAPERIAATE JA KÄYTTÖTARKOITUS4 3. TUOTTEEN PIIRTEET... 4 4. TYYPPISELITYS...
Standardi: Q/HFJ02027-2000 ROD -tyypin Sulkusyötin KÄYTTÖOHJE Suomen Imurikeskus Oy Puh. 02-576 700-1 - SISÄLTÖ 1. RAKENNE... 3 2. TOIMINTAPERIAATE JA KÄYTTÖTARKOITUS4 3. TUOTTEEN PIIRTEET... 4 4. TYYPPISELITYS...
15 käyttökohdetta. Fluken visuaaliselle infrapunalämpömittarille SUUNNITELTU HUOMAAMAAN KAIKEN. Sovellusohje. Havaitse ongelmat välittömästi
 15 käyttökohdetta Fluken visuaaliselle infrapunalämpömittarille Sovellusohje Havaitse ongelmat välittömästi Fluken visuaalisissa infrapunalämpömittareissa yhdistyvät pistelämpömittarin kätevyys ja lämpökameran
15 käyttökohdetta Fluken visuaaliselle infrapunalämpömittarille Sovellusohje Havaitse ongelmat välittömästi Fluken visuaalisissa infrapunalämpömittareissa yhdistyvät pistelämpömittarin kätevyys ja lämpökameran
Kondensaattorin läpi kulkeva virta saadaan derivoimalla yhtälöä (2), jolloin saadaan
, jolloin saadaan") VAIHTOVIRTAPIIRI 1 Johdanto Vaihtovirtapiirien käsittely perustuu kolmen peruskomponentin, vastuksen (resistanssi R), kelan (induktanssi L) ja kondensaattorin (kapasitanssi C) toimintaan. Tarkastellaan
VAIHTOVIRTAPIIRI 1 Johdanto Vaihtovirtapiirien käsittely perustuu kolmen peruskomponentin, vastuksen (resistanssi R), kelan (induktanssi L) ja kondensaattorin (kapasitanssi C) toimintaan. Tarkastellaan
KONETEKNIIKAN KOULUTUSOHJELMA YLEISIMPIEN MEKAANISTEN VIKOJEN DIAGNOSOINTI VÄRÄHTELYMITTAUSTEN AVULLA. Miikka Torvikoski KANDIDAATINTYÖ 2016
 KONETEKNIIKAN KOULUTUSOHJELMA YLEISIMPIEN MEKAANISTEN VIKOJEN DIAGNOSOINTI VÄRÄHTELYMITTAUSTEN AVULLA Miikka Torvikoski KANDIDAATINTYÖ 2016 Ohjaajat: Yrjö Louhisalmi, Konsta Karioja TIIVISTELMÄ Yleisimpien
KONETEKNIIKAN KOULUTUSOHJELMA YLEISIMPIEN MEKAANISTEN VIKOJEN DIAGNOSOINTI VÄRÄHTELYMITTAUSTEN AVULLA Miikka Torvikoski KANDIDAATINTYÖ 2016 Ohjaajat: Yrjö Louhisalmi, Konsta Karioja TIIVISTELMÄ Yleisimpien
OPERAATIOVAHVISTIMET 2. Operaatiovahvistimen ominaisuuksia
 KAJAANIN AMMATTIKORKEAKOULU Tekniikan ja liikenteen ala TYÖ 11 ELEKTRONIIKAN LABORAATIOT H.Honkanen OPERAATIOVAHVISTIMET 2. Operaatiovahvistimen ominaisuuksia TYÖN TAVOITE Tutustua operaatiovahvistinkytkentään
KAJAANIN AMMATTIKORKEAKOULU Tekniikan ja liikenteen ala TYÖ 11 ELEKTRONIIKAN LABORAATIOT H.Honkanen OPERAATIOVAHVISTIMET 2. Operaatiovahvistimen ominaisuuksia TYÖN TAVOITE Tutustua operaatiovahvistinkytkentään
Virheen kasautumislaki
 Virheen kasautumislaki Yleensä tutkittava suure f saadaan välillisesti mitattavista parametreistä. Tällöin kokonaisvirhe f määräytyy mitattujen parametrien virheiden perusteella virheen kasautumislain
Virheen kasautumislaki Yleensä tutkittava suure f saadaan välillisesti mitattavista parametreistä. Tällöin kokonaisvirhe f määräytyy mitattujen parametrien virheiden perusteella virheen kasautumislain
Magneettikenttä ja sähkökenttä
 Magneettikenttä ja sähkökenttä Gaussin laki sähkökentälle suljettu pinta Ampèren laki suljettu käyrä Coulombin laki Biot-Savartin laki Biot-Savartin laki: Onko virtajohdin entisensä? on aina kuvan tasoon
Magneettikenttä ja sähkökenttä Gaussin laki sähkökentälle suljettu pinta Ampèren laki suljettu käyrä Coulombin laki Biot-Savartin laki Biot-Savartin laki: Onko virtajohdin entisensä? on aina kuvan tasoon
A/D-muuntimia. Flash ADC
 A/D-muuntimia A/D-muuntimen valintakriteerit: - bittien lukumäärä instrumentointi 6 16 audio/video/kommunikointi/ym. 16 18 erikoissovellukset 20 22 - Tarvittava nopeus hidas > 100 μs (
A/D-muuntimia A/D-muuntimen valintakriteerit: - bittien lukumäärä instrumentointi 6 16 audio/video/kommunikointi/ym. 16 18 erikoissovellukset 20 22 - Tarvittava nopeus hidas > 100 μs (
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio. Mat Systeemien Identifiointi. 4. harjoitus
 TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2.4129 Systeemien Identifiointi 4. harjoitus 1. a) Laske valkoisen kohinan spektraalitiheys. b) Tarkastellaan ARMA-prosessia C(q 1 )y = D(q 1 )e,
TEKNILLINEN KORKEAKOULU Systeemianalyysin laboratorio Mat-2.4129 Systeemien Identifiointi 4. harjoitus 1. a) Laske valkoisen kohinan spektraalitiheys. b) Tarkastellaan ARMA-prosessia C(q 1 )y = D(q 1 )e,
= vaimenevan värähdysliikkeen taajuus)
") Fysiikan laboratoriotyöohje Tietotekniikan koulutusohjelma OAMK Tekniikan yksikkö TYÖ 7: MEKAANINEN VÄRÄHTELIJÄ Teoriaa Vaimeneva värähdysliike y ŷ ŷ ŷ t T Kuva. Vaimeneva värähdysliike ajan funktiona.
Fysiikan laboratoriotyöohje Tietotekniikan koulutusohjelma OAMK Tekniikan yksikkö TYÖ 7: MEKAANINEN VÄRÄHTELIJÄ Teoriaa Vaimeneva värähdysliike y ŷ ŷ ŷ t T Kuva. Vaimeneva värähdysliike ajan funktiona.
VIM-M2 VIBRATION MONITOR KUVAUS VIM-M2. Sisältö
 VIM-M2 VIBRATION MONITOR KUVAUS Sisältö 1. TEKNISET TIEDOT... 2 2. KUVAUS... 3 3. KÄYTTÖ... 4 4. LIITÄNTÄ... 5 5. VIAN ETSINTÄ... 6 6. VALMISTAJA... 6 VIM-M2 FI.docx 2006-03-01 / BL 1(6) 1. TEKNISET TIEDOT
VIM-M2 VIBRATION MONITOR KUVAUS Sisältö 1. TEKNISET TIEDOT... 2 2. KUVAUS... 3 3. KÄYTTÖ... 4 4. LIITÄNTÄ... 5 5. VIAN ETSINTÄ... 6 6. VALMISTAJA... 6 VIM-M2 FI.docx 2006-03-01 / BL 1(6) 1. TEKNISET TIEDOT
Lisätietoja SKF:n tuotevalikoimasta saat Pole Position -ohjelmasta. Pyydä lisätietoja ja kysy jäsenyydestä SKF-edustajaltasi.
 Lisätietoja SKF:n tuotevalikoimasta saat Pole Position -ohjelmasta. Pyydä lisätietoja ja kysy jäsenyydestä SKF-edustajaltasi. vsm.skf.com SKF Group 2006 PUB80/P7 6394 FI 06 SKF:n vetonivelsarjat UUTTA
Lisätietoja SKF:n tuotevalikoimasta saat Pole Position -ohjelmasta. Pyydä lisätietoja ja kysy jäsenyydestä SKF-edustajaltasi. vsm.skf.com SKF Group 2006 PUB80/P7 6394 FI 06 SKF:n vetonivelsarjat UUTTA
FYSA220/1 (FYS222/1) HALLIN ILMIÖ
 HALLIN ILMIÖ") FYSA220/1 (FYS222/1) HALLIN ILMIÖ Työssä perehdytään johteissa ja tässä tapauksessa erityisesti puolijohteissa esiintyvään Hallin ilmiöön, sekä määritetään sitä karakterisoivat Hallin vakio, varaustiheys
FYSA220/1 (FYS222/1) HALLIN ILMIÖ Työssä perehdytään johteissa ja tässä tapauksessa erityisesti puolijohteissa esiintyvään Hallin ilmiöön, sekä määritetään sitä karakterisoivat Hallin vakio, varaustiheys