Radio-ohjattavan pienoismallin mekatroniikan ja ohjelmiston kehitys
|
|
|
- Ilmari Seppo Auvinen
- 6 vuotta sitten
- Katselukertoja:
Transkriptio
1 1 Radio-ohjattavan pienoismallin mekatroniikan ja ohjelmiston kehitys Valvoja: Mika Matilainen Valter Sandström Otso Saarentaus Muutoshistoria Versionumero Pvm Selitys Tekijä(t) pohja Otso Saarentaus Projektin kulku lisätty Otso & Valter 0.3 Viimeistely Otso & Valter
2 2 Alkuperäinen Tehtävänanto Projektin taustana on Aalto Yliopiston, Insinööritieteden korkeakoulun koneenrakennustekniikan laitoksen kurssi: Kon Ajoneuvojen tuotekehitys. Kurssilla vuonna 2011 aloitettiin projekti jossa oli tarkoitus rakentaa radio-ohjattavan pienoismalli ajodynamiikan opetuskäyttöön. Projekti jäi kuitenkin kesken ja nyt siihen on tekeillä jatkoprojekti mekaniikan ja mekatroniikan kannalta. Kon kurssin projektiryhmässä on yksi henkilö tekemässä mekatroniikkaa. Nyt tarkoituksena on että tässä sivuprojektissa tehdään tietyt osajärjestelmät Kon kurssin RCauto projektiin, osajärjestelmät ovat käyttöliittymä sekä ajoneuvonhallintajärjestelmä. Tehtävänä on toteuttaa ja suunnitella pc-pohjainen käyttöliittymä ja parantaa mekatroniikkaa, jossa päätehtävänä on toteuttaa pienoismallista puuttuvat abs ja esc-järjestelmät. Projektin yleiset tavoitteet: ABS jarrutekniikka toteutettuna mikrokontrolleriin Ajoneuvonhallintajärjestelmän (ESC) toteuttaminen mikrokontrolleriin. Koko PC käyttöliittymän toteuttaminen, johon kuuluu m.m.: o o o Realaikainen datan näyttäminen loogisesti Ajoneuvon ohjaus Ajodatan keruu ja hallinta
3 3 Contents 1 JOHDANTO TAUSTA TAVOITTEET RISKIT PROJEKTIN KULKU AIKATAULU JA KULKU Periodi Periodi KUORMITUS MUUTOKSET TOTEUTUS VASTUUALUEET MIKROKONTROLLERIOHJELMOINTI Lukkiutumattomat jarrut Ajoneuvonhallintajärjestelmä KÄYTTÖLIITTYMÄOHJELMOINTI HAASTEET Jarruohjain Käyttöliittymä Yleiset haasteet TULOKSET RADIO-OHJATTAVA PIENOISMALLI LUKKIUTUMATTOMAT JARRUT Simulointi Yhden pyörän testi Ajokoe KÄYTTÖLIITTYMÄ Käyttöliittymän esittely Käyttöliittymän käyttö YHTEENVETO JA JOHTOPÄÄTÖKSET LÄHTEET LIITTEET... 28
4 4 1 JOHDANTO 1.1 Tausta Projektin taustana on Aalto Yliopiston, Insinööritieteden korkeakoulun koneenrakennustekniikan laitoksen kurssi: Kon Ajoneuvojen tuotekehitys. Kurssilla vuonna 2011 aloitettiin projekti jossa oli tarkoitus rakentaa radio-ohjattavan pienoismalli ajodynamiikan opetuskäyttöön. Projekti jäi kuitenkin kesken ja nyt siihen tehtiin jatkoprojekti mekaniikan ja mekatroniikan kannalta. Kon kurssin projektiryhmässä oli yksi henkilö tekemässä mekatroniikkaa. Tämän sivuprojektin tarkoituksena oli tehdä tietyt osajärjestelmät Kon projektiin, osajärjestelmät olivat käyttöliittymä sekä ajoneuvonhallintajärjestelmä. Näin muodostui ohjelmisto ja mekatroniikkaan kolmen hengen ryhmä. 1.2 Tavoitteet Tavoitteena oli kehittää kurssin Kon radio-ohjattavan pienoismallin mekatroniikkaa ja käyttöliittymää. Tehtäviin kuuluui toteuttaa ja suunnitella pcpohjainen käyttöliittymä ja parantaa mekatroniikkaa, jossa päätehtävänä oli toteuttaa pienoismallista puuttuvat abs ja esc-järjestelmät. Projektin yleiset tavoitteet: ABS jarrutekniikka toteutettuna mikrokontrolleriin Ajoneuvonhallintajärjestelmän (ESC) toteuttaminen mikrokontrolleriin. Koko PC käyttöliittymän toteuttaminen, johon kuuluu: o Realaikainen datan näyttäminen o Ajoneuvon ohjaus o Ajodatan keruu ja hallinta o Ajoneuvon ohjaus komentotiedostolla (tallennettujen ohjausliikkeiden avulla) 1.3 Riskit Meidän arviot riskeistä oli - budjetin ylittyminen - aikataulun venyminen - mikrokontrollerin teho abs & esc järjestelmässä - mikrokontrollerin käyttö samanaikaisesti esc ja abs hallintaan - radiokommunikoinnin viiveet (radiokommunikointia hallitaan käyttöliittymällä) - käyttöliittymä-ohjelman rajoitteet (Matlab) - Pienoismallin mekaniikan kehityksen viivästyminen

5 5 2 PROJEKTIN KULKU 2.1 Aikataulu ja Kulku Periodi Ensimäisen periodin aikana projekti eteni kohtuullisen hyvin suunnitelman mukaan. Tehtävien tilanne periodin lopussa on näkyvissä kuvassa 1. Kuvasta voidaan todeta tehtävän numero 7, eli ESC algoritmin ohjelmointi ja simulointi simulinkillä, olevan myöhässä. Myöhästymisen syynä oli ABS algoritmin ennustettua vaikeampi toteutus, ja tästä johtuen ESC algoritmi, joka ei ollut yhtä tärkeä toteuttaa, jätettiin myöhemmin toteutettavaksi. Myös numero 12, käyttöliittymän sarjaväylän kommunikaatio, oli tässä vaiheessa hieman aikataulua jäljessä. Syynä oli eteenkin vaikeuksia auton lähettämän datan lukemisessa Periodi Kuva 1: Tehtävien tilanne ensimmäisen periodin jälkeen Toisen periodin lopputilanne on esitetty kuvassa 2. Auton myöhästymisen, sekä muun projektin ajankäytön takia tehtävät numero 10 ja 11 jäivät kesken. Niissä ESC:n prioriteetti oli alhaisempi kuin ABS:än, jonka takia ABS testaukset saatiin tehtyä ajoissa jopa kenttätasolla. Mutta ESC:n testaaminen olisi ollut erittäin vaikeaa koska autoa ei pystytty ajamaan. Tehtävää numero 17 ei toteutettu, koska projekti oli työmäärältään jo venynyt reilusti yli mitä oli suunniteltu. Koimme tärkeämmäksi toteuttaa sulavasti toimivan käyttöliittymän jolla autoa pystytään ajamaan ja testaamaan.

6 6 Kuva 2: Tehtävien tilanne toisen periodin jälkeen 2.2 Kuormitus Tehtäväkohtainen kuormitusjakauma on esitettu taulukossa 1. Alun perin laskettiin että kuormitus olisi Valterille 70 tuntia ja Otso:lle 71 tuntia. Lopulta varsinaista projektityötä Valter teki 102 tuntia ja Otso 99 tuntia. Arvioon ei kuulu kurssin muita työtunteja, kuten luennot ja esitykset, esityksiin valmistautuminen ja loppuraportin kirjoittaminen.
7 7 Nro Tehtävä/ Tavoite Taulukko 1. Työmäärä tehtävien mukaan. 1 Käyttöliittymä ohjelman valinta, mennäänkö vielä LabView:llä vai otetaanko joku muu? Riippuu tehtävä stä Vastuu Arvioit u työmä ärä (h) Käyt etty työm äärä (h) Valter Käyttöliittymäteknologiaan tutustuminen 1 Valter ABS järjestelmään tutustuminen Otso ESC algoritmeista teknologiaselvitys Otso Kiihtyvyys- ja kulmanopeusantureiden Valter & Otso 4 7 testaus. 6 ABS algoritmien ohjelmointi 3 Otso ESC algoritmien ohjelmointi 4 Otso ABS osuuden toteutus mikrokontrolleriin ja 3 & 6 Otso 4 6 oheisdatan integraatio 9 ESC osuuden toteutus mikrokontrolleriin ja 3 & 7 Otso 10 4 oheisdatan integraatio 10 ABS & ESC lattiatestaus 8 & 9 Otso ABS & ESC kenttätestit ja viimeistely 10 Otso Käyttöliittymä: Sarjaväylän kommunikaatio 2 Valter Käyttöliittymä: Ajoneuvon manuaaliohjaus 12 Valter Käyttöliittymä: Datan keruu & 13 Valter 8 14 tallentaminen 15 Käyttöliittymä: Raakadatan näyttäminen 13 Valter Käyttöliittymä: Ajetun reitin näyttäminen 15 Valter (hyödyntäen kiihdytysdataa ja/tai renkaiden odometriaa) 17 Käyttöliittymä: Ajokomentojen 13 Valter 14 1 lähettäminen tiedostosta 18 Käyttöliittymä: Testaus käytännössä 17 Valter 8 20 Kumulatiivinen työkuormitus on esitetty kuvassa 3, jossa y akselilla on tuntimäärä ja x-akselilla aika. Kuvaajasta nähdään että on ollut hyvin hiljainen jakso projektin suhteen, tässä odottelimme pienoismallin mekaniikan valmistumista. Sitten 5.12 kun pääsimme testaamaan pienoismallia käytännössä, tuli Otso:lle kiire saada ABS ym. mekatroniikkaan liittyvät asiat (mm. kommunikointi) toimimaan oikeassa ajossa.
8 Valter Otso 20 0 Kuva 3: Kumulatiivinen työmäärä 2.3 Muutokset Käyttöliittymä o Todettiin että tarvitaan parametri jolla voidaan säätää maksimi kiihtyvyyttä o Käyttöliittymään lisättiin myös uusi välilehti parametrien säätöä varten. o Itse parametrien tallennus ja lataus (toi paljon lisätöitä). ABS & ESC toteutus o ABS toteutus todettiin vaativan simuloinnin, sen sijaan päätettiin että ESC:tä ei simuloida. o Lisätöitä tuli myös mm. mikrokontrollerin kommunikoinnin ja parametrien päivityksen kanssa o ESC huomattavasti yksinkertaisempi kuin alun perin oletettiin. Ohjelmointityö ei vaatinut niin paljon aikaa ESC:n tekemisessä. o Yleistä mekatroniikan korjausta pienoismalliin liittyen. Testausvaiheessa selvisi puutteita elektroniikassa, joita jouduimme korjaamaan yhdessä Ajoneuvotekniikan tuotekehitys kurssin opiskelijan kanssa.
9 9 3 TOTEUTUS 3.1 Vastuualueet Projektin vastuualueet jaettiin seuraavanlaisesti: Valter Sandström Käyttöliittymä o Graafinen toteutus o Taustakoodi Otso Saarentaus Jarrukontrollerin ohjelmointi o ABS ohjelmointi o ESC ohjelmointi Järjestelmän kommunikointi tallennettavien parametrien osalta Ajoneuvotekniikan tuotekehityksen kurssin oppilaat Mekaniikka Sähkö Elektroniikka 3.2 Mikrokontrolleriohjelmointi Lukkiutumattomat jarrut Säätöalgoritmi Ohjelmointi pää-kontrollerin ja pulssianturi mikrokontrolleri:n osalta Lukkiutumattomat jarrut (ABS) pyrkivät ajoneuvon estämään pyörän lukkiutumisen jarrutustilanteessa. Algoritmin herätteenä toimii kuskin antama jarrutusvoima ja säädettävänä arvona on pyörän kulmakiihtyvyys. Mitään muita arvoja ei käytetty simuloinnissa taikka toteutuksessa. Todellisuudessa täydellinen ABS algoritmi sisältää myös ajoneuvon nopeuden estimoinnin. Tätä tarvitaan algrotimin ensimmäisessä vaiheessa. Se laskee kuvassa 4 esitetyn alimman kuvaajan vaiheen kaksi pituuden. Koska nopeuden tarkka estimointi on hankalaa ja vaihe kaksi vaikuttaa jarrutusmatkaan hyvin vähän, niin päätimme jättää sen pois algoritmista. Vaihe kaksi on käytössä vain jarrutustapahtuman alkaessa. [1]

10 10 Kuva 4. ABS-säätöalgoritmin toiminta, ote kirjasta Safety,Comfort and Convenience Systems, Robert Bosch GmbH Varsinainen algortimi joka estää pyörän lukkiutumisen koko jarrutusmatkan ajalla toimii vaiheiden 3 ja 7 välillä. Taulukossa 2 on selitetty miten algoritmi väleillä 3-7 toimii. Se on myös sama algoritmi jolla teimme ensimmäiset testit. Keskeisintä ABS järjestelmän kalibroinnissa on sopivien +A, +a ja -a arvojen löytäminen. [1] Vaihe Tehtävä Taulukko 2. ABS algoritmin toiminta, lähde: [1] 3 Kun vaiheessa 2 on käynnistetty säätöalgoritmi kulmakiihtyvyyden laskiessa tarpeeksi pieneksi (kuva 4, keskimmäinen kuvaaja). Niin vaiheessa 3 lähdetään tiputtamaan jarrutusvoimaa. Voimaa tiputetaan niin kauan, kunnes kulmakiihtyvyys nousee samalle tasolle joka aloitti abs-säädön. 4 Jarrutusvoimaa pidetään tasaisena kunnes kulmakiihtyvyys on noussut määritellylle ylätasolle. Pyörät eivät siis pyöri täysin vapaasti, mutta eivät myöskään jarruta täydellä teholla. 5 Kun kulmakiihtyvyys kiihtyy taas liian nopeasti, aletaan jarrutusvoimaa nostamaan, tämä saa aikaan kulmakiihtyvyyden laskemisen ja pyörä alkaa taas hidastumaan. Seuraavaan vaiheeseen siirrytään kun kulmakiihtyvyys alittaa ylärajan (katso kuva 4.

11 11 keskimmäinen kuvaaja) 6 Jarrutusvoiman nosto aiheutti kulmakiihtyvyyden laskemisen. Tässä vaiheessa pidetään sama jarrutusvoima, kunnes se on laskenut alle määritellyn keskitason. Kaikki 3 määriteltyä tasoa kalibroidaan erikseen kokeellisesti. 7 Kun kulmakiihtyvyys on alle keskitason, käynnistyy 7 vaihe. Tällä tasolla jarrutusvoimaa nostetaan portaittain, kunnes saavutaan samaan tilanteeseen mistä algoritmi alkoi. Eli kulmakiihtyvyys on laskenut alle alatason. Tällöin algoritmi jatkaa taas vaiheesta Simulointi Simuloinnissa käytettiin Matlab Simulink ohjelmistoa, ajoneuvon malli oli yksinkertaistettu yhden pyörän malliksi. Jota voidaan kuvata kaavalla:. [2] (1) Jossa M B on jarruttava momentti, r k on pyörän dynaaminen vierintäsäde, F x on pitkittäisvoima, J w on pyörän hitausmomentti ja on pyörän kulmakiihtyvyys. Pyörän simulointimalli on esitettynä kuvassa 5, koko simulointimalli on kuvassa 6. Simuloinnin tuloksista keskustellaan luvussa 4. Kuva 5. Yhden pyöränmalli.

12 12 Kuva 6. ABS-järjestelmän simulointi Ensimmäinen toteutus ABS toteutettiin Radio-ohjattavan pienoismallin jarrukontrolleriin. Jarrusäätimenä toimii Arduinon Mega 2560 R3 mikrokontrolleri, elektroniikkaa havainnollistava kaavio on esitetty liitteessä 3. Mikrokontrolleri ohjaa suoraan neljää jarruservoa, servonohjaukseen tarvittava koodi on toteutettu ajoneuvotekniikan tuotekehitysryhmän puolesta. ABS-algoritmi perustuu luvussa logiikkaan, eli vaiheesta 7 hypätään suoraan vaiheeseen 3. Mikrokontrollerin säätösilmukka pyötii 100Hz:in taajuudella, joten täydellinen säätökierros voidaan toteuttaa 100 millisekunnin aikana. Ensimmäisen vaiheen ABS-ohjelmakoodi on liitteessä 4. ABS:än kalibrointiin tarvittavat parametrit ovat liitteessä 5. Pyörien pyörimisnopeudet saadaan toiselta mikrokontrollerilta (Teensy), joten niiden laskemiseen ei mene laskentatehoa. Teensy hoitaa myös pyörimisnopeuksien alipäästösuodatuksen. Kuitenkin kokeissa havaitaan että ABS-algoritmi on liian raskas neljää pyörää säädettäessä. Tämän takia varsinaista ajoa varten tehtiin yksinkertaistettu algoritmi Korjattu toteutus Mikrokontrollerin rajoitetun laskentatehon takia päädyimme tiputtamaan pois vaiheet 6 ja 7, siten että vaihe viisi nostaa jarrutusvoimaa kunnes alin kulmakiihtyvyysraja (-a) alitetaan. Jolloin algoritmi siirtyy suoraan vaiheeseen 3. Kuva 7 esittää jarrutustapahtumaa yksinkertaistetulla algoritmilla.
 Pyörien kulmanopeudet (Ajoneuvon estimoitu etenemisnopeus) Kiihtyvyysanturi (Ajoneuvon")
13 Ajoneuvonhallintajärjestelmä Säätöalgoritmi Kuva 7. Karsittu ABS-säätö. Ajoneuvohallintajärjestelmän (ESC) tehtävänä on kääntää autoa kuljettajan haluamaan suuntaan. Ajoneuvonhallintajärjestelmä tarvitsee useita antureita: Ratin kääntökulma (Kuljettajan haluama ajosuunta) Pyörien kulmanopeudet (Ajoneuvon estimoitu etenemisnopeus) Kiihtyvyysanturi (Ajoneuvon estimoitu sivuttaisnopeus) Gyro (Ajoneuvon pyörimisnopeus) Suurin haaste ESC säädössä on todellisen etenemisnopeuden ja sivuttaisnopeuden laskenta. Siihen löytyy patentoituja ja autonvalmistajien salassapidettyjä keinoja, lähteestä [3] löytyy osa teoriaa Fordin käyttämään menetelmään. Itse ESC-algoritmi on yksinkertainen, se jakaantuu kahteen vaiheeseen, kulmanopeuteen perustuvaan säätöön ja sortokulmaan perustuvaan säätöön. Sortokulma on sivuttaisnopeus jaettuna etenemisnopeus (V y /V x ). Sitä käytetään kun auto on niin pahassa sivuluisussa että kulmanopeus ei anna luotettavaa arvoa, tämä säätö kytkeytyy yleensä päälle jos sortokulma on yli 10 astetta. [4] Normaalissa tilassa ESC säätää kulmanopeuden avulla, jolloin ajoneuvon ali- tai yliohjautumista pyritään korjaamaan. Ali- ja yliohjautuminen on esitetty kuvassa 8.
 Määritellään referenssi kulmanopeus (tai sortokulma jos todellinen sortokulma > 10 astetta), tämä onnistuu ajoneuvon dynamiikkaan perustuvan kaavan avulla.")
14 14 Kuva 8. Ajoneuvon aliohjautuminen (understeer) ja yliohjautuminen (oversteer). Säätö toimii aina seuraavanlaisesti: 1) Määritellään referenssi kulmanopeus (tai sortokulma jos todellinen sortokulma > 10 astetta), tämä onnistuu ajoneuvon dynamiikkaan perustuvan kaavan avulla. Kaavan ratkaisemiseen tarvitaan painopiste, painospiteen etäisyys etu ja takaakseleista, etu ja taka-akselin kaartojäykkyydet sekä ajonopeus. 2) Päätetään jarrutettava pyörä (lähteestä 5): if(abs(ω)) (abs(ωref) (1/S)) // Yliohjaava if(ω) > 0 Jarrutetaan vasenta etupyörää else Jarrutetaan vasenta takapyörää elseif(abs(ω)) < (abs(ωref) S) // Aliohjaava if(ω)>0 Jarrutetaan oikeaa etupyörää else Jarrutetaan oikeaa takapyörää 3) aloitetaan säätö alusta Toisen vaiheen S parametri on herkkyyskerroin, jolla säädetään kuinka herkästi ESC:n tulisi puuttua ajoon. w on kulmanopeus, mutta mikäli sortokulma on kasvanut liian suureksi, ei kulmanopeuden avulla voida säätää. Silloin käytetään samaa säätöä, mutta vertaillaan laskettua kulmanopeutta referenssikulmanopeuteen.
15 Toteutus Toteutus perustuu suoraan edellä olevaan kappaleeseen. Toteutuksessa ajoneuvon etenemisnopeus lasketaan pyörien pyörimisnopeusantureiden avulla niin, että huomioidaan jos jotakin pyörää on jarrutettu. Ja otetaan vastakkainen diagonaali (esim. etu oikea ja vasen taka), mikäli kumpaakaan näistä ei olla jarrutettu juuri edellisellä silmukan suorituskerralla, otetaan näistä nopeamman pyörän nopeus ja käytetään sitä laskemaan ajoneuvon nopeus. Mikäli kaikkia pyöriä on jarruteltu, lasketaan nopeus kaikkien pyörien keskiarvosta. Kulmanopeus luetaan suoraan gyrosta, mutta ajoneuvon sivusuuntainen nopeus integroidaan kiihtyvyysanturin y-akselista. Integrointi aloitetaan heti kun kuljettaja kääntää rattia, ja lopetetaan kun ratin kääntö loppuu. Tällä tavoin pyritään helpottamaan kontrollerin kuormitusta. Ratin kääntökulma saadaan potentiometristä joka on kiinnitetty ohjausservoon, pääkontrolleri lähettää ohjauskulman jarrukontrollerille, joten se helpottaa hieman jarrukontrollerin kuormitusta. Valitettavasti emme koskaan ehtineet kokeilla esc säätöä todellisuudessa. ESC:hen liittyvät parametrit on taulukossa, liitteessä Käyttöliittymäohjelmointi Tavoitteena oli rakentaa käyttöliittymä jolla ajoneuvoa voitaisiin ohjata reaaliajassa tietokoneen kautta. Tämän lisäksi käyttöliittymä tulisi näyttää ajodataa reaaliajassa sekä käyttäjän halutessa tallentaa tämän data ajon jälkeen. Lopuksi ajoneuvoa tulisi myös olla mahdollista ohjata valmiin komentotiedoston kautta. Ensinmäinen haaste oli valita ohjelma jonka avulla käyttöliittymää rakennettaisiin. Ensinmäinen vaihtoehto oli LabView, jota oltiin käytetty alkuperäisen auton ohjaukseen. Muita hyötyjä LabView ohjelmassa oli tämän lisäksi että sillä on helppo rakentaa selkeitä ja tyylikkäitä rajapintoja datan näyttämiseen. Viime vuoden projektin aikana oli kuitenkin todettu sen taustakoodin tekemisen olevan hieman hankalaa, tämän lisäksi realiaikainen ohjaus ei ikinä saatu toimimaan kovin hyvin. LabViewin vaihtoehtona oli MATLAB, jonka etuihin kuului että se ohjelmana oli ennestään tuttu käyttöliittymän tekijälle. Käyttöliittymän tekeminen MATLAB:in avulla oli kuitenkin ennestään tuntematonta. Valinta päättyi lopulta MATLAB:iin, koska todettiin sen todennäköisesti toimivan LabViewtä vikkelämmin. Tämän lisäksi autoa simuloitaisiin tulevaisuudessa todennäköisesti MATLAB:issa jolloin opiskelijoille olisi mukavampaa kun sekä ajot että simuloinnit olisi mahdollista suorittaa samassa ohjelmassa. Käyttöliittymän graafinen rajapinta rakennettiin matlabin GUIDE työkalun avulla. Kuvassa 9 käyttöliittymän ohjelmistorakenne on havainnollistettu.

16 16 Kuva 9: Käyttöliittymäohjelman eri osat sekä niiden riippuvuudet. Ohjelman toiminta on varsin yksinkertainen. Käyttäjä on vuorovaikutuksessa ohjelman kanssa graafisen rajapinnan kautta. Rajapinta kommunikoi taustakoodin kanssa aina käyttäjän antaessa jonkin komennon, tai kun kuuvaajat tulisi päivittää uusimmalla ajodatalla. Taustakoodi hoitaa kaikki ohjelman varsinaiset toiminnot. Kommunikointi auton kanssa, ajodatan näyttäminen ja tallentaminen, sekä auton parametrien lataus autolle tai autosta. Ohjelmaa ajetaan kahdessa säikeissä jotta käyttöliittymä pysyisi myös käyttäjän käytettävissä ajon aikana. Apufunktiot ovat ryhmä pieniä funktioita jolla ohjelmakoodin toistuvuutta on vähennetty. Kaikki data tallennetaan MATLAB:in omina.mat-tiedostoina. 3.4 Haasteet Jarruohjain Suurimmat haasteet jarrujen ohjelminnissa oli että ABS simulointi oli oletettua vaikeampaa. Ongelmia tuli mm. yhden pyörän mallin epälineaarisuudesta. Lopulta simulointi saatiin onnistumaan, mutta kuitenkin ESC:n teko myöhästy koska ABS:ää pidettiin tärkempänä. ABS:än kanssa ongelmat jatkuvat koska täydellinen ABS ei toimi jarruohjaimella, epäilemme että servojen ohjaus ei toimi kunnolla kun ohjelma käy liian raskaaksi. Tähän ongelmaan ei löydetty täydellistä ratkaisua, vaan teimme yksinkertaistetun ABS-algoritmin jota mikrokontrolleri jaksoi pyörittää. ESC:n testaus osoittautui haasteelliseksi, koska pienoismallin mekaniikka valmistui myöhässä ja muutenkin meidän aikataulu ei riittänyt ESC:n testaamiseen. Lisäksi haasteita toi se, että ei ollut kunnolla tilaa testata ESC:tä, olosuhteet Suomessa oli jo varsin lumiset ja autolla ei voitu ajaa ulkona, koska elektroniikka ei ollut tarpeeksi hyvin suojattua.
17 17 Parametrien haku osoittautui hankalaksi. Lähinnä koska pääkontrollerin sarajportin puskuri täyttyi liian helposti. Ongelma ratkaistiin osittain, lähettämällä parametrit sykleissä, jolloin puskuri ei ehtinyt täyttyä, vaan pääkontrolleri ehti lähettää parametrit eteenpäin PC:lle Käyttöliittymä Käyttöliittymän toteutuksen suurimmat haasteet osoittautui olevan kommunikointi auton kanssa sekä reaaliajassa tapahtuvan ajon aikana ilmestyvät käyttöliittymän jäätymiset. Auton kanssa kommunikointi saatiin lopulta toimimaan hyvin ajon aikana, mutta lopullisessa ohjelman versiossa ilmastyy vielä hieman vaikeuksia kun auton parametreja halutaan tuoda autosta. Parametrien tuomiseen menee joskus useampikin yritys. Ajon aikana tapahtuvat käyttöliittymän jäätymiset ilmestyivät kun ohjelman ajo sykli asetettiin liian lyhyeeksi. Toisaalta, pitkä sykli aiheutti viiveitä ajossa. Lopulta tämäkin ongelma ratkaistiin, muun muassa tekemällä kommunikaatiosta asynkonisen. Toinen haaste, joka seurasi kommunikointivaikeuksista, oli yleinen ajan puute. Tästä johtuen moni asia ei ehditty toteuttaa ja testata kunnolla. Tästä syystä esimerkiksi auton ajaminen komentotiedostosta päätettiin jättää kokonaan tekemättä. Virheitä löytyy kuitenkin myös toteutetuista osista: Loppuraportin kirjoitushetkellä huomattiin että auton paikannus kiihtyvyysanturista on laskettu väärin. Paikka lasketaan ainoastaan kiihtyvyydestä, eikä aijempaa nopeutta oteta huomioon. Tällöin esimerkiksi auto pysähtyy reittikartassa heti mikäli se ei kiihdytä mihinkään suuntaan Yleiset haasteet Yleisenä haasteena koko projektissa oli kommunikointi kolmannen osapuolen kanssa, tämä aiheutti hitautta sekä käyttöliittymä että jarru-ohjelmointi puolella. Mikäli testauksissa ilmeni ongelmia elektroniikassa, jouduimme odottamaan että elektroniikkavastaava korjasi piirilevyä. Toinen haaste oli tila, testaukseen ei löytynyt kunnollista tilaa jossa pienoismallilla pystyi ajamaan.

18 18 4 TULOKSET 4.1 Radio-ohjattava pienoismalli Pienoismalli oli vielä projektiin mukaan mentäessä (1 periodi) aikataulussa. Mutta 2. periodin alussa mekaniikkapuoli oli pahasti myöhässä. Kuitenkin pienoismalli saatiin ajokuntoon projektin lopussa. Ainoat varsinaiset ongelmat mitä vielä jäi olivat kytkimen luistaminen, liian pieni kulmavaihde (vaihde kesti kuitenkin hyvin meidän testit pienillä ajonopeuksilla) sekä akkusäädinpiirin rajoitin. Näistä ongelmista huolimatta autolla pystyttiin ajamaan sisätiloissa täydellisesti kokoonpantuna Kuva 10 esittää valmista pienoismallia. 4.2 Lukkiutumattomat jarrut Simulointi Kuva 10. Radio-ohjattava pienoismalli valmiina. Simuloinnilla onnistuimme säätämään sopivat alkuarvot ABS-algoritmille. Hankalaa simuloinnista teki se, että piti löytää sopiva kulmakerroin pyörän vauhdin vähentymiselle. Kuvassa 11 on esitettynä pyörän kulmakiihtyvyys. Kiihtyvyyden nousu äkillisesti minimiarvostaan johtuu siitä että pyörän dynamiikka ei sisältänyt pyörän realistista hidastuvuutta jarrumomentin funktiona, jolloin vaihe 4 jossa jarrutusvoimaa pidettiin vakiona nosti kulmakiihtyvyyden äkillisesti.


19 19 Kuva 11. Simuloitu kulmakiihtyvyys. Kuvassa 12 on esitetty samasta simuloinnista jarrutusmomentti. Kuvaajasta nähdään selvästi 3, 4 ja 5 vaihe. Vaihe 6 jää simuloinnissa erittäin lyhyeksi ja 7 ei nosta jarrutusmomentti portaittain, vaan lyhyen vakio-jarrutusmomenttiajan takia se nousee vain loivemmin. Kuitenkin näitä vaiheita vastaava kulmakiihtyvyys käyttäytyy oikein kuvaajassa joka on esitetty kuvassa 13. Kuva 12. Jarrutusmomentti Skaalattu ajoneuvon nopeus ja pyörän kulmanopeus näkyvät hyvin kuvassa 13, tässä nähdään juuri oikea käyttäytyminen. Eli pyörän kulmanopeuden tulee pysytellä alle ajoneuvon nopeuden ja saada äkillisiä hidastuvuuksia jolloin abs vapauttaa pyörän. Simulointi ei ole tehty loppuun asti, koska mentäessä pieniin nopeuksiin järjestelmä menee epästabiiliksi kitkakertoimen toiminnan takia. Vastaavaa käyttäytymistä kun kuvassa, pyritään tavoittelemaan lattiatesteissä.


20 20 Kuva 13. Ajonopeus ja pyörän kulmakiihtyvyys Yhden pyörän testi Täydellistä ABS-algoritmia kokeiltiin ensiksi yhdellä pyörällä, testaukseen tarvittiin pienoismallin lisäksi akkuporakone. Akkuporakone kiinnitettiin pyörään jolloin sillä voitiin pyörittää pyörää. Akkuporakoneen lukko toimi säädettävänä momentinrajoittimena, sillä voitiin säätää sitä, kuinka helposti pyörä menee lukkoon. Kuvassa 14 näkyy käytetty testipenkki. Kokeen tulos on esitetty kuvassa 15, kuvaajassa on pyörän etenemisnopeus (km/h). Kuva 14. ABS testipenkki.

21 21. Kuva 15. Yhden pyörän abs-koe. Kuvaajasta nähdään että abs algoritmi toimii varsin hyvin, vain kahteen otteeseen pyörä on lukittautumassa kokonaan. Säädössä on kuitenkin yksi ongelma, servo toimii liian hitaasti ja on vaikea saada säätö vain pienelle servon alueelle. Eli joskus algoritmi vapauttaa pyörää liikaa. Tätä ongelmaa emme saaneet korjattua yhden pyörän kokeessa Ajokoe Ajokokeessa testattiin vain yksinkertaista ABS-algoritmia, koska yhden pyörän testissä selvisi että mikrokontrolleri ei jaksa pyörittää täydellistä ABS-algoritmia. Ongelmasta on kerrottu enemmän kappaleessa 3.4. Ajokokeessa ongelmana oli saada pienoismallille tarpeeksi vauhtia, pienten kulmakiihtyvyyksien takia ABS lukittaa pöyrät pienillä ajonopeuksilla. Tämänkaltainen käyttäytyminen onkin juuri oikein, koska pienillä ajonopeuksilla on tehokkainta lukittaa pyörät jarrutuksen aikana. Saimme ajoneuvolle riittävän vauhdin, jolloin huomattiin silmämääräisestikkin että ABS toimi. Kuvissa 16 ja 17 on esitetty kokeesta saatu jokaisen pyörän nopeus. Ensin autolle annetaan työntö, joka aiheuttaa nopeuden äkillisen nousun.
.")

22 22 kuva 16. Etupyörien nopeudet (sininen = vasen, vihr. = oikea). kuva 17. Takapyörien nopeudet (sininen = vasen, vihr. = oikea). Kuvaajista nähdään että ABS vapauttaa jokaisen pyörän kun ne ovat lähellä lukkiutua, etenkin etupyörissä ABS näyttää toimivan erityisen hyvin. Takapyörät näyttävät lukkiutuvan helpommin, tämä johtuu siitä että niihin ohjautuu liikaa jarrutustehoa. Pienoismalli on nimittäin erittäin etupainoinen, jolloin etujarrut rasittuu enemmän. Kokeessa jarrut oli kalibroitu jarruttamaan yhtä paljon edessä ja takana. Tästä huolimatta ABS näyttää käyttäytyvän oikein.
23 Käyttöliittymä Käyttöliittymän esittely Käyttöliittymän lopullinen versio on esitetty kuvissa 18 ja 19. Kuvassa 18 oleva käyttöliittymän seurantanäkymä on kuvankaappaus lyhyeestä ajosta. Valitettavasti tila jossa autoa ajettiin oli hyvin rajoitettu, joten mitään pidempää ajojaksoa ei pystytty toteuttamaan. Tästä kärsi eteenkin vasemmassa yläkulmassa ajetun reitin karttaa näyttävä Route Map, joka sisältää paljon häiriöitä tässä pienessä skaalassa. Auton pyörien enkoodedereista laskettu nopeus on sen sijaan suhteellisen tarkkaa. Nopeus on nähtävissä Route Map:in oikealla puolella olevassa Velocity kuvaajassa. Nopeuden alapuolella oleva horisontaalinen Wheel Direction kuvaaja näyttää auton etupyörien suunnan. Kolme alhaisinta palkkia ovat vasemmalta oikealle Brake, Throttle sekä Reverse, eli jarru, kaasu ja peruutus. Käyttöliittymän vasemmassa alareunassa oleva Console antaa käyttäjälle kaikenlaisia hyödyllisiä vinkkejä, kuten että autoon on yhdistetty onnistuneesti tai mikis ajojaksoa ei voitu aloittaa. Kuvaajista on ajan puutteen syystä jäänyt yksiöt pois. Toisaalta yksiöt on määritelty ainoastaan nopeuden y-akselilla (km/h), sekä reittikartan akselit (m). Muut kuvaajat ja akselit kuvaavat ainoastaan suhteellista muutosta. Oikeassa laidassa oleva General osiolla hallitaan yhteydet autoon sekä auton datan tallennus. Manual Drive osiossa käynnistetään ja lopetetaan manuaaliajo. Automatic Drive osiossa käynnistetään automaattinen ajo, eli ajokomentojen lukeminen tiedostosta. Painekkeet ovat poistettu käytöstä koska toimintoa ei toteutettu. Kuva 19 on kuvankaappaus auton parametrien muokkausnäkymästä. Kuvassa näkyvät parametrit eivät ole auton oikeat, vaan ne ovat testiparametreja jolla parametrien vienti autoon ja tuonti autosta on testattu. Parametrit on jaettu seuraaviin kategorioihin: ABS parameters, ESP parameters, Vehicle parameters, sekä Brake servo calibration. Vasemmassa alanurkassa näkyvä Console osio sekä oikealla reunalla sijaitsevat osiot General, Manual Drive, sekä Automatic Drive, ovat samat kuin seurantanäkymässä.


24 24 Kuva 18: Käyttöliittymän seurantanäkymä. Kuva 19: Käyttöliittymän auton parametrien muokkausnäkymä.
25 Käyttöliittymän käyttö Käyttöliittymän ajoa varten on ensin asennettava kirjasto nimeltään Psychtoolbox 3. Kirjaston asennusohjeet, sekä muita käyttöliittymän vaatimuksia löytyy liitteestä 2. Käyttöliittymän käyttö on varsin suoraviivaista. Käyttöliittymä käynnistetään ajamalla RCCarGUI.m tiedosto, jolloin kuvaa 18 vastaava aloitusnäkymä tulee näkyviin. Ennen autoon yhdistämistä on ensin valittava oikea serial portti johon Xbee radio on kiinnitetty. Kun oikea serial portti on valittu autoon voidaan yhdistää painamalla Connect to car paineketta. Kun Console kertoo auton olevan valmis ajojakso voidaan aloittaa painamalla Begin drive session. Autoa ohjataan seuraavien ohjeiden mukaan näppäimistöä käyttäen: Ohjaimet Nuolinäppäimistöt: Kaasu, pakki, vasemmalle ja oikealle käännös Välilyönti: Täysjarrutus V, B, N: Heikko, keskivahva ja vahva jarrutus C, Kytkin T, Torvi Ajojakso lopetetaan painamalla End drive session paineketta. Yksinkertaista ajodataa on näkyvissä seurantanäkymässä, täydelliseen ajodatan pääsee käsiksi avaamalla työhakemiston Drive Sessions kansio, ja avaamalla ajonjaksoa vastaava.mat-tiedosto. Auton parametreja muokataan Car Setup välilehdessä. Auton tämänhetkisiä parametreja voi ladata autosta Get car conf. parameters painekkeella, ja uusia lähetetään autolle painamalla Set car conf. parameters. Liitteestä 5 löytyy lista parametrien raja-arvoista. Vasemmasta ylänurkasta löytyy joukko painekkeita joilla voi tallentaa tietokoneelle nykyiset parametrit tai ladata vanhoja parametreja. Lopuksi muutama hyödyllinen vihje käyttöliittymän käyttäjälle: Autoa ajatessa on oltava varovainen kaasun ja peruutuksen kanssa. Käyttöliittymässä on jonkinverran älyä, esimerkiksi jarrukomento poistaa automaattisesti kaasukomennon, mutta mikään ei estä esimerkiksi käyttäjän peruuttamasta autoa täydessä liikkeessä eteenpäin, joka tietenkin saisi tuhoisaa jälkeä moottoreissa sekä voimansiirroissa. Auton parametreia evät ole suojattu mitenkään väärältä syötöltä. Get car conf. parameters toiminto on hieman epävakaa, ja tästä syystä useampikin yritys saattaa olla tarpeen ennen kuin parametrien siirto onnistuu.
26 26 5 YHTEENVETO JA JOHTOPÄÄTÖKSET Projekti oli osakokonaisuus radio-ohjattavan pienoismallin rakentamisprojektia. Projektin tavoitteisiin kuului suunnitella ja toteuttaa radio-ohjattavan pienoismallin käyttöliittymä, sekä simuloida ja toteuttaa lukkiutumattomat jarrut ja ajoneuvonvakausjärjestelmä pienoismallille. Näistä tavoitteista tärkeimmät olivat käyttöliittymä ja lukkiutumattomien jarrujen ohjelmointi ja toteutus mikrokontrolleriin. Vastuualueisiin kuului myös koko jarrukontrollerin sulautettu ohjelmointi, mukaan lukien kommunikointi, anturit ja parametrit. Aikaa projektille oli varattu 70 tuntia käyttöliittymälle ja jarru-osuudelle. Mutta lopulta aikaa kului noin 100 tuntia per osuus. Vaikka kaikkiin tavoitteisiin ei edes päästy. Tavoitteista käyttöliittymän mänööveri ohjaus komentotiedostosta jäi toteuttamatta ja sulautetun ohjelmoinnin puolelta ajoneuvonvakautusjärjestelmän testaus ja viimeistely jäi puuttumaan. Kuitenkin saimme aikaan nähden toimivan ja käyttötarkoitukseen sopivan käyttöliittymän. Sekä sulautetun ohjelmiston puolella saimme lukkiutumattomat jarrut testattua ja toimimaan. Tärkeänä projektissa oli saada käyttöliittymä ja sulautettu ohjelmisto hyväksi ja toimivaksi ajoa varten. Kommunikoinnissa ei ollut viiveitä ja ajo pienoismallilla oli varsin helppoa projektin loppupuolella. Aikataulutuksesta opimme että aina tulisi arvioida aika joka menee kolmannen osapuolen kanssa kommunikoimiseen ja asioiden hoitamiseen. Nyt kun projekti oli vain yksi osa suurempaa projektia, jouduimme olemaan myös paljon mukana auton mekaanisen osien testauksessa. Toki samalla päästiin kokeilemaan käyttöliittymän ja jarrujen toimintaa. Voimme myös todeta että projektia suunniteltaessa on vaikeaa arvioida projektiin kuluvaa aikaa jos asiasta ei tiedä tarpeeksi, esimerkiksi nyt Matlab ohjelmiston sarjaporttikommunikaatio osoittauti huomattavasti hankalammaksi kuin aluksi ajateltiin, aiheuttaen mm. käyttöliittymän jumiutumista. Myös ABS puolella oli hankaluuksia, selvisi että ABS-algoritmi onkin oletettua monimutkaisempi ja vaati enemmän aikaa. Projektin alussa laaditut tehtävät pysyivät samoina koko projektin elinkaaren ajan, ainoastaan pieniä muutoksia toivottiin käyttöliittymään. Eli perinteiseen IT-projektiin nähden toivotut muutokset kesken kaiken olivat erittäin vähäisiä, jonka perusteella voidaan todeta että suunnitellut tehtävät olivat hyvin määritelty heti alussa.
27 27 LÄHTEET 1. Robert Bosch GmbH, Safety,Comfort and Convenience Systems 2. Ari Tuononen & Tapio Koisaari, Ajoneuvojen dynamiikka 3. Hongtei Eric Tseng, Behrouz Ashrafi, Dinu Madau, Todd Allen Brown & Darrel Recker, The Development of Vehicle Stability Control at Ford 4. Song Chuanxue,Xuan Shengyi, Li Jianhua & Jin Liqiang, Research on Vehicle Electronic Stability Control Method 5. Diomidis I. Katzourakis, Ioannis Papaefstathiou & Michail G. Lagoudakis, An Open-Source Scaled Automobile Platform for Fault-Tolerant Electronic Stability Control

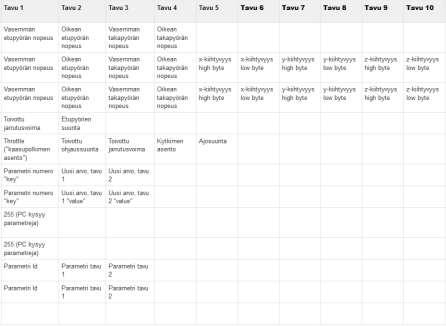
28 28 LIITTEET Liite 1: Sarjaväyläprotokolla
29 29 Liite 2: Käyttöliittymän asennus Vaatimukset: Käyttöliittymä on onnistuneesti käytetty Windowsilla MATLAB 2010 ja 2012 versioiden kanssa. Psychtoolbox 3 kirjaston toimintoja vaaditaan ainoastaan ajon aikana, eli käyttöliittymää voidaan avata ilman tätä kirjastoa. Psychtoolbox 3 asennus Hyvät asennusohjeet löytyvät Psychtoolboxin kotisivuilta. Kotisivuilta löytyy myös kaikenlaista muuta hyödyllistä tietoa kirjastosta. Asennuksen jälkeen käyttöliittymän voi käynnistää ajamalla tiedoston RCCarGUI.m

30 30 Liite 3: Radio-ohjattavan pienoismallin elektroniikka
31 31 Liite 4: ABS-algoritmi int ret = (zero_brake + ((long(brake_pwr) * brake_scale) / 255)) <= max_brake? zero_brake + ((long(brake_pwr) * brake_scale) / 255) : max_brake; if(abs_on && brake_pwr > 0) // PHASE 0 START if(a < (-1 * ((int)abs_start_threshold * 50 / 255)) && *phase == 0) *max_brake_pwr = ret; *phase = 1; else if(*phase == 1) // PHASE 3 (drop braking force) (*counter)++; *abs_brake_pwr = *max_brake_pwr - (*counter * phase1_gain) > zero_brake? *max_brake_pwr - (*counter * phase1_gain) : zero_brake; ret = *abs_brake_pwr; if(a > (-1 * ((int)abs_start_threshold * 50 / 255))) *counter = 0; *phase = 2; else if(*phase == 2) // PHASE 4 (hold current braking force) ret = *abs_brake_pwr; (*counter)++; if((abs(a) > ((int)abs_high_threshold * 50 / 255))) *counter = 0; *phase = 3; if((*counter) > 2) *counter = 0; *phase = 3; else if(*phase == 3) // PHASE 5 (lift braking force) (*counter)++; *abs_brake_pwr = *abs_brake_pwr + (*counter * phase3_gain) < max_brake? *abs_brake_pwr + (*counter * phase3_gain) : max_brake; ret = *abs_brake_pwr; // simplified if(a < (-1 * ((int)abs_start_threshold * 50 / 255))) *max_brake_pwr = *abs_brake_pwr; *counter = 0; *phase = 1; if((*counter) > 2) *max_brake_pwr = *abs_brake_pwr; *counter = 0; *phase = 1; // advanced /* if(a < ((int)abs_high_threshold * 50 / 255)) *counter = 0; *phase = 4; */ /*else if(*phase == 4) // PHASE 6 (advanced)
32 32 ret = *abs_brake_pwr; if(a < ((int)abs_middle_threshold * 50 / 255)) *counter = 0; *phase = 5; else if(*phase == 5) // PHASE 7 (advanced) (*counter)++; if(*counter < phase5_gain_timer_threshold) *abs_brake_pwr = *abs_brake_pwr + (*counter * phase5_gain) < max_brake? *abs_brake_pwr + (*counter * phase5_gain) : max_brake; else if (*counter >= phase5_gain_timer_threshold && *counter < phase5_hold_timer_threshold) // hold else *counter = 0; ret = *abs_brake_pwr; if(a < (-1 * ((int)abs_start_threshold * 50 / 255))) *max_brake_pwr = *abs_brake_pwr; *counter = 0; *phase = 1; */ else *phase = 0;

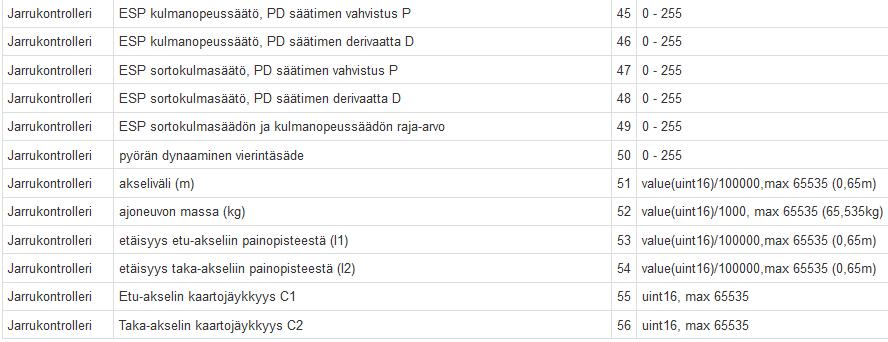
33 33 Liite 5: ABS & ESC parametrit
Projektisuunnitelma. Radio-ohjattavan pienoismallin mekatroniikan ja ohjelmiston kehitys
 1 Radio-ohjattavan pienoismallin mekatroniikan ja ohjelmiston kehitys Muutoshistoria Versionumero Pvm Selitys Tekijä(t) 0.1 18.9.2012 Otso Saarentaus 2 Sisällysluettelo 1 PROJEKTIN SISÄLTÖ... 3 1.1 TAUSTA......3
1 Radio-ohjattavan pienoismallin mekatroniikan ja ohjelmiston kehitys Muutoshistoria Versionumero Pvm Selitys Tekijä(t) 0.1 18.9.2012 Otso Saarentaus 2 Sisällysluettelo 1 PROJEKTIN SISÄLTÖ... 3 1.1 TAUSTA......3
Radio-ohjattavan pienoismallin mekatroniikan ja ohjelmiston kehitys
 1 Radi-hjattavan pienismallin mekatrniikan ja hjelmistn kehitys Muutshistria Versinumer Pvm Selitys Tekijä(t) 0.1 27.10.2012 Ots Saarentaus 0.2 28.10.2012 Kuvien lisäys Ots Saarentaus 2 1 TILANNE NYT JA
1 Radi-hjattavan pienismallin mekatrniikan ja hjelmistn kehitys Muutshistria Versinumer Pvm Selitys Tekijä(t) 0.1 27.10.2012 Ots Saarentaus 0.2 28.10.2012 Kuvien lisäys Ots Saarentaus 2 1 TILANNE NYT JA
AS Automaatio ja systeemitekniikan projektityöt A13 10 Radio ohjattavan pienoismallin ohjausjärjestelmän ja käyttöliittymän kehittäminen
 Väliraportti AS 0.3200 Automaatio ja systeemitekniikan projektityöt A13 10 Radio ohjattavan pienoismallin ohjausjärjestelmän ja käyttöliittymän kehittäminen Toni Liski, Konsta Hölttä, Lasse Kortetjärvi
Väliraportti AS 0.3200 Automaatio ja systeemitekniikan projektityöt A13 10 Radio ohjattavan pienoismallin ohjausjärjestelmän ja käyttöliittymän kehittäminen Toni Liski, Konsta Hölttä, Lasse Kortetjärvi
S09 04 Kohteiden tunnistaminen 3D datasta
 AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
AS 0.3200 Automaatio ja systeemitekniikan projektityöt S09 04 Kohteiden tunnistaminen 3D datasta Loppuraportti 22.5.2009 Akseli Korhonen 1. Projektin esittely Projektin tavoitteena oli algoritmin kehittäminen
S11-09 Control System for an. Autonomous Household Robot Platform
 S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
S11-09 Control System for an Autonomous Household Robot Platform Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Quang Doan Lauri T. Mäkelä 1 Kuvaus Projektin tavoitteena on
S14 09 Sisäpeltorobotti AS Automaatio ja systeemitekniikan projektityöt. Antti Kulpakko, Mikko Ikonen
 S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
S14 09 Sisäpeltorobotti AS Automaatio ja systeemitekniikan projektityöt. Antti Kulpakko, Mikko Ikonen
 S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
S14 09 Sisäpeltorobotti AS 0.3200 Automaatio ja systeemitekniikan projektityöt Antti Kulpakko, Mikko Ikonen 1. Projektin tavoitteet Projektin tavoitteena on toteuttaa ohjelmisto sisäpeltorobottiin seuraavien
Projekti A: iskunvaimennindynamometri
 Projekti A: iskunvaimennindynamometri PROJEKTISUUNNITELMA Tekijät: Mälkönen Joonas Orhanen Samppa Pajula Matti Forsström Niko 83D 838C 8757V 8830U Nurminen Tuomas Päiväys: 5.3. Kon-6.08 Ajoneuvojen tuotekehitys
Projekti A: iskunvaimennindynamometri PROJEKTISUUNNITELMA Tekijät: Mälkönen Joonas Orhanen Samppa Pajula Matti Forsström Niko 83D 838C 8757V 8830U Nurminen Tuomas Päiväys: 5.3. Kon-6.08 Ajoneuvojen tuotekehitys
ZigBee-ohjaus kuorma-autolle
 ZigBee-ohjaus kuorma-autolle Juho Frits Petteri Koivumäki 10. helmikuuta 2010 Tavoitteet Projektityössä on tavoitteena rakentaa langaton ZigBee-ohjausverkko kaukoohjattavalle kuorma-autolle (kts. Kuva
ZigBee-ohjaus kuorma-autolle Juho Frits Petteri Koivumäki 10. helmikuuta 2010 Tavoitteet Projektityössä on tavoitteena rakentaa langaton ZigBee-ohjausverkko kaukoohjattavalle kuorma-autolle (kts. Kuva
Harjoitustyö - Mikroprosessorit Liikennevalot
 Saku Chydenius tammikuu 2004 Asko Ikävalko Harjoitustyö - Mikroprosessorit Liikennevalot Työn valvoja: Kimmo Saurén RAPORTTI 1(8) 1. Alkuperäinen tehtävänanto 2. Määritelmä valojen vaihtumiselle Muodosta
Saku Chydenius tammikuu 2004 Asko Ikävalko Harjoitustyö - Mikroprosessorit Liikennevalot Työn valvoja: Kimmo Saurén RAPORTTI 1(8) 1. Alkuperäinen tehtävänanto 2. Määritelmä valojen vaihtumiselle Muodosta
Konfiguraatiotyökalun päivitys
 Konfiguraatiotyökalun päivitys Kuinka aloitan? Konfiguraatiotyökalu avataan niin kuin aiemminkin suoraan Tenstar clientin käyttöliittymästä, tai harjoituksen ollessa käynnissä. Kuinka aloitan konfiguraatiotyökalun
Konfiguraatiotyökalun päivitys Kuinka aloitan? Konfiguraatiotyökalu avataan niin kuin aiemminkin suoraan Tenstar clientin käyttöliittymästä, tai harjoituksen ollessa käynnissä. Kuinka aloitan konfiguraatiotyökalun
Moottorin kierrosnopeus Tämän harjoituksen jälkeen:
 Moottorin kierrosnopeus Tämän harjoituksen jälkeen: osaat määrittää moottorin kierrosnopeuden pulssianturin ja Counter-sisääntulon avulla, osaat siirtää manuaalisesti mittaustiedoston LabVIEW:sta MATLABiin,
Moottorin kierrosnopeus Tämän harjoituksen jälkeen: osaat määrittää moottorin kierrosnopeuden pulssianturin ja Counter-sisääntulon avulla, osaat siirtää manuaalisesti mittaustiedoston LabVIEW:sta MATLABiin,
Kuopio Testausraportti Asiakkaat-osakokonaisuus
 Kuopio Testausraportti Asiakkaat-osakokonaisuus Kuopio, testausraportti, 25.3.2002 Versiohistoria: Versio Pvm Laatija Muutokset 0.1 11.2.2002 Matti Peltomäki Ensimmäinen versio 0.9 11.2.2002 Matti Peltomäki
Kuopio Testausraportti Asiakkaat-osakokonaisuus Kuopio, testausraportti, 25.3.2002 Versiohistoria: Versio Pvm Laatija Muutokset 0.1 11.2.2002 Matti Peltomäki Ensimmäinen versio 0.9 11.2.2002 Matti Peltomäki
Kuvaruudun striimaus tai nauhoitus. Open Broadcaster Software V.20. Tero Keso, Atso Arat & Niina Järvinen (muokattu )
") Kuvaruudun striimaus tai nauhoitus Open Broadcaster Software V.20 Tero Keso, Atso Arat & Niina Järvinen (muokattu 28.11.2017) OBS 1 (12) Sisällysluettelo Mikä on OBS... 2 Ohjelman perusasetukset... 2 Tarvittavat
Kuvaruudun striimaus tai nauhoitus Open Broadcaster Software V.20 Tero Keso, Atso Arat & Niina Järvinen (muokattu 28.11.2017) OBS 1 (12) Sisällysluettelo Mikä on OBS... 2 Ohjelman perusasetukset... 2 Tarvittavat
Kuvaruudun striimaus tai nauhoitus. Open Broadcaster Software V.20. Tero Keso, Atso Arat, Niina Järvinen & Valtteri Virtanen (muokattu 20.2.
 Kuvaruudun striimaus tai nauhoitus Open Broadcaster Software V.20 Tero Keso, Atso Arat, Niina Järvinen & Valtteri Virtanen (muokattu 20.2.2019) Sivu 1 / 14 Sisällysluettelo Mikä on OBS... 2 Ohjelman perusasetukset...
Kuvaruudun striimaus tai nauhoitus Open Broadcaster Software V.20 Tero Keso, Atso Arat, Niina Järvinen & Valtteri Virtanen (muokattu 20.2.2019) Sivu 1 / 14 Sisällysluettelo Mikä on OBS... 2 Ohjelman perusasetukset...
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
Teknillinen korkeakoulu Sähkö- ja tietoliikennetekniikan osasto AS-0.3200 Automaatio- ja systeemitekniikan projektityöt CeilBot 2DoF camera actuator Antti Riksman Sisältö 1 CeilBot 3 2 Projektin tämän
RACE-KEEPER COMPARO PC-OHJELMAN PIKAOHJE
 RACE-KEEPER COMPARO PC-OHJELMAN PIKAOHJE SISÄLLYS 1 Mittausten (outing) avaus ja analysointi 2 HD videoiden teko 1 MITTAUSTEN AVAUS JA ANALYSOINTI Asenna Comparo PC-ohjelma ja käynnistä ohjelma pikakuvakkeesta.
RACE-KEEPER COMPARO PC-OHJELMAN PIKAOHJE SISÄLLYS 1 Mittausten (outing) avaus ja analysointi 2 HD videoiden teko 1 MITTAUSTEN AVAUS JA ANALYSOINTI Asenna Comparo PC-ohjelma ja käynnistä ohjelma pikakuvakkeesta.
HePon ryhmäajokoulutus Ajomuodostelmat
 HePon ryhmäajokoulutus 9.4.2011 Ajomuodostelmat Peesaus Edellä ajavaan etäisyys 30 cm Kovissa nopeuksissa parikin metriä jo auttaa Älä aja renkaat limittäin Pidä veto koko ajan päällä Älä kiihdytä ja rullaa
HePon ryhmäajokoulutus 9.4.2011 Ajomuodostelmat Peesaus Edellä ajavaan etäisyys 30 cm Kovissa nopeuksissa parikin metriä jo auttaa Älä aja renkaat limittäin Pidä veto koko ajan päällä Älä kiihdytä ja rullaa
VHOPE-sovelluksen ja VHOPE-kirjastotiedostojen asentaminen
 VHOPE-sovelluksen ja VHOPE-kirjastotiedostojen asentaminen Vaihe 1: Asenna VHOPE PC:hen täytyy asentaa VHOPE-sovellus, ennen kuin USB-muistitikun esitysaineistoa voidaan ryhtyä käyttämään. VCN (Volvo Corporate
VHOPE-sovelluksen ja VHOPE-kirjastotiedostojen asentaminen Vaihe 1: Asenna VHOPE PC:hen täytyy asentaa VHOPE-sovellus, ennen kuin USB-muistitikun esitysaineistoa voidaan ryhtyä käyttämään. VCN (Volvo Corporate
Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla.
 Speedohealer V4 Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla. 1. Esipuhe Onnittelemme sinua Speedohealer laitteen oston johdosta. HealTech Electronics Ltd. on omistautunut
Speedohealer V4 Electronisen nopeus ja matkamittarin kalibrointi laite huippunopeus muistilla. 1. Esipuhe Onnittelemme sinua Speedohealer laitteen oston johdosta. HealTech Electronics Ltd. on omistautunut
Laboratorioraportti 3
 KON-C3004 Kone-ja rakennustekniikan laboratoriotyöt Laboratorioraportti 3 Laboratorioharjoitus 1B: Ruuvijohde Ryhmä S: Pekka Vartiainen 427971 Jari Villanen 69830F Anssi Petäjä 433978 Mittaustilanne Harjoituksessa
KON-C3004 Kone-ja rakennustekniikan laboratoriotyöt Laboratorioraportti 3 Laboratorioharjoitus 1B: Ruuvijohde Ryhmä S: Pekka Vartiainen 427971 Jari Villanen 69830F Anssi Petäjä 433978 Mittaustilanne Harjoituksessa
WintEVE Sähköauton talvitestit
 2013 WintEVE Sähköauton talvitestit J.Heikkilä Centria 5/13/2013 1 Sisältö Reitti 1 (42.3km) -2 C -5 C lämpötilassa, 10.1.2013, 14:08:28 14:59:37... 2 Reitti 1 (42.3km) -14 C -17 C lämpötilassa, 11.1.2013,
2013 WintEVE Sähköauton talvitestit J.Heikkilä Centria 5/13/2013 1 Sisältö Reitti 1 (42.3km) -2 C -5 C lämpötilassa, 10.1.2013, 14:08:28 14:59:37... 2 Reitti 1 (42.3km) -14 C -17 C lämpötilassa, 11.1.2013,
Matriisit ovat matlabin perustietotyyppejä. Yksinkertaisimmillaan voimme esitellä ja tallentaa 1x1 vektorin seuraavasti: >> a = 9.81 a = 9.
 Python linkit: Python tutoriaali: http://docs.python.org/2/tutorial/ Numpy&Scipy ohjeet: http://docs.scipy.org/doc/ Matlabin alkeet (Pääasiassa Deni Seitzin tekstiä) Matriisit ovat matlabin perustietotyyppejä.
Python linkit: Python tutoriaali: http://docs.python.org/2/tutorial/ Numpy&Scipy ohjeet: http://docs.scipy.org/doc/ Matlabin alkeet (Pääasiassa Deni Seitzin tekstiä) Matriisit ovat matlabin perustietotyyppejä.
Käsittelykokeet alkaen luokissa BE, C1E, CE, D1E ja DE
 1 (6) Käsittelykokeet 1.7.2018 alkaen luokissa BE, C1E, CE, D1E ja DE Käsittelykokeiden tavoite Käsittelykokeen tavoitteena on varmistaa, että ajokorttia suorittava osaa käsitellä ajoneuvoyhdistelmää turvallisesti
1 (6) Käsittelykokeet 1.7.2018 alkaen luokissa BE, C1E, CE, D1E ja DE Käsittelykokeiden tavoite Käsittelykokeen tavoitteena on varmistaa, että ajokorttia suorittava osaa käsitellä ajoneuvoyhdistelmää turvallisesti
Simulaattorin asennus- ja käyttöohje
 Linux ja Windows XP Versio Päiväys Muokkaaja Kuvaus 0.2 16.2.2006 Mikko Halttunen Katselmoinin jälkeen 0.1 13.2.2006 Mikko Halttunen Alustava versio Sisällysluettelo 1 Johdanto... 3 2 Simulaattorin asennus...
Linux ja Windows XP Versio Päiväys Muokkaaja Kuvaus 0.2 16.2.2006 Mikko Halttunen Katselmoinin jälkeen 0.1 13.2.2006 Mikko Halttunen Alustava versio Sisällysluettelo 1 Johdanto... 3 2 Simulaattorin asennus...
Joni Heikkilä WINTEVE SÄHKÖAUTON TALVITESTIT
 Joni Heikkilä C WINTEVE SÄHKÖAUTON TALVITESTIT C, Centria tutkimus ja kehitys - forskning och utveckling, 13 Joni Heikkilä WINTEVE SÄHKÖAUTON TALVITESTIT Centria ammattikorkeakoulu 2013 1 JULKAISIJA: Centria
Joni Heikkilä C WINTEVE SÄHKÖAUTON TALVITESTIT C, Centria tutkimus ja kehitys - forskning och utveckling, 13 Joni Heikkilä WINTEVE SÄHKÖAUTON TALVITESTIT Centria ammattikorkeakoulu 2013 1 JULKAISIJA: Centria
Matopeli C#:lla. Aram Abdulla Hassan. Ammattiopisto Tavastia. Opinnäytetyö
 Matopeli C#:lla Aram Abdulla Hassan Ammattiopisto Tavastia Opinnäytetyö Syksy 2014 1 Sisällysluettelo 1. Johdanto... 3 2. Projektin aihe: Matopeli C#:lla... 3 3. Projektissa käytetyt menetelmät ja työkalut
Matopeli C#:lla Aram Abdulla Hassan Ammattiopisto Tavastia Opinnäytetyö Syksy 2014 1 Sisällysluettelo 1. Johdanto... 3 2. Projektin aihe: Matopeli C#:lla... 3 3. Projektissa käytetyt menetelmät ja työkalut
Äänellä vauhtia robottiin
 Äänellä vauhtia robottiin Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla robotti, joka väistää esteitä ja kulkee sitä nopeampaa mitä kovempi ääni sen lähistöllä on. Robotti tunnistaa esteet
Äänellä vauhtia robottiin Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla robotti, joka väistää esteitä ja kulkee sitä nopeampaa mitä kovempi ääni sen lähistöllä on. Robotti tunnistaa esteet
XCRANE OMINAISUUDET KUUSI KULJETTAJA-PROFIILIA VENTTIILIEN SÄÄDÖT
 XCRANE OMINAISUUDET KUUSI KULJETTAJA-PROFIILIA Jokaiseen kuljettajaprofiiliin voi tallentaa omat säädöt seuraaville ominaisuuksille Venttiilin parametrit o Miniminopeus (ma) o Maksiminopeus (%) o Rampit
XCRANE OMINAISUUDET KUUSI KULJETTAJA-PROFIILIA Jokaiseen kuljettajaprofiiliin voi tallentaa omat säädöt seuraaville ominaisuuksille Venttiilin parametrit o Miniminopeus (ma) o Maksiminopeus (%) o Rampit
A11-02 Infrapunasuodinautomatiikka kameralle
 A11-02 Infrapunasuodinautomatiikka kameralle Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo Sisällysluettelo 1. Projektityön tavoite
A11-02 Infrapunasuodinautomatiikka kameralle Projektisuunnitelma AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Lassi Seppälä Johan Dahl Sisällysluettelo Sisällysluettelo 1. Projektityön tavoite
Ohjeita kirjan tekemiseen
 Suomen Sukututkimustoimisto on yhdessä Omakirjan kanssa tehnyt internetiin uuden Perhekirja-sivuston. Se löytyy osoitteesta: www.omakirja.fi -> Kirjat -> Perhekirja tai http://www.omakirja.fi/perhekirja?product=6
Suomen Sukututkimustoimisto on yhdessä Omakirjan kanssa tehnyt internetiin uuden Perhekirja-sivuston. Se löytyy osoitteesta: www.omakirja.fi -> Kirjat -> Perhekirja tai http://www.omakirja.fi/perhekirja?product=6
KIITOS RICA OPTIMOINTIOHJELMAN VALITSEMISESTA
 KIITOS RICA OPTIMOINTIOHJELMAN VALITSEMISESTA Asennusohjeiden sisältö 1. RICA optimointiohjelmoinnin periaate isoftloaderilla... 2 2. RICA isoftloader toimituspaketin sisältö... 3 3. isoftloader Sync-ohjelmiston
KIITOS RICA OPTIMOINTIOHJELMAN VALITSEMISESTA Asennusohjeiden sisältö 1. RICA optimointiohjelmoinnin periaate isoftloaderilla... 2 2. RICA isoftloader toimituspaketin sisältö... 3 3. isoftloader Sync-ohjelmiston
Kannattaa opetella parametrimuuttujan käyttö muidenkin suureiden vaihtelemiseen.
 25 Mikäli tehtävässä piti määrittää R3:lle sellainen arvo, että siinä kuluva teho saavuttaa maksimiarvon, pitäisi variointirajoja muuttaa ( ja ehkä tarkentaa useampaankin kertaan ) siten, että R3:ssä kulkeva
25 Mikäli tehtävässä piti määrittää R3:lle sellainen arvo, että siinä kuluva teho saavuttaa maksimiarvon, pitäisi variointirajoja muuttaa ( ja ehkä tarkentaa useampaankin kertaan ) siten, että R3:ssä kulkeva
Videon tallentaminen Virtual Mapista
 Videon tallentaminen Virtual Mapista Kamera-ajon tekeminen Karkean kamera ajon teko onnistuu nopeammin Katseluohjelmassa (Navigointi > Näkymät > Tallenna polku). Liikeradan ja nopeuden tarkka hallinta
Videon tallentaminen Virtual Mapista Kamera-ajon tekeminen Karkean kamera ajon teko onnistuu nopeammin Katseluohjelmassa (Navigointi > Näkymät > Tallenna polku). Liikeradan ja nopeuden tarkka hallinta
- Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset
 Phantom / H3-3D Gimbal Kalibrointiohjeet - Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset Aloitus: DJI
Phantom / H3-3D Gimbal Kalibrointiohjeet - Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset Aloitus: DJI
1 Asentaminen. 2 Yleistä ja simuloinnin aloitus 12/2006 1.1.1
 1 Asentaminen...2 2 Yleistä ja simuloinnin aloitus...2 2.1 PI-säätimet...3 2.2 Trendit...4 3 Lämpölaitoksen ohjaus...5 4 Voimalan alkuarvojen muuttaminen...6 5 Tulostus...8 6 Mahdollisia ongelmia...8 6.1
1 Asentaminen...2 2 Yleistä ja simuloinnin aloitus...2 2.1 PI-säätimet...3 2.2 Trendit...4 3 Lämpölaitoksen ohjaus...5 4 Voimalan alkuarvojen muuttaminen...6 5 Tulostus...8 6 Mahdollisia ongelmia...8 6.1
S11-04 Kompaktikamerat stereokamerajärjestelmässä. Projektisuunnitelma
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Projektisuunnitelma Ari-Matti Reinsalo Anssi Niemi 28.1.2011 Projektityön tavoite Projektityössä
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt S11-04 Kompaktikamerat stereokamerajärjestelmässä Projektisuunnitelma Ari-Matti Reinsalo Anssi Niemi 28.1.2011 Projektityön tavoite Projektityössä
FOTONETTI BOOK CREATOR
 F O T O N E T T I O Y FOTONETTI BOOK CREATOR 6 2012 Kemintie 6 95420 Tornio puhelin: 050-555 6500 pro/kirja: 050-555 6580 www.fotonetti.fi Ohjelman asentaminen 1 Hae ohjelma koneellesi osoitteesta http://www.fotonetti.fi/kuvakirjatilaa
F O T O N E T T I O Y FOTONETTI BOOK CREATOR 6 2012 Kemintie 6 95420 Tornio puhelin: 050-555 6500 pro/kirja: 050-555 6580 www.fotonetti.fi Ohjelman asentaminen 1 Hae ohjelma koneellesi osoitteesta http://www.fotonetti.fi/kuvakirjatilaa
LUMA SUOMI -kehittämisohjelma LUMA FINLAND -utvecklingsprogram LUMA FINLAND development programme Ohjelmointia Arduinolla
 Ohjelmointia Arduinolla Kyösti Blinnikka, Olarin koulu ja lukio LUMA-keskus Aalto Mikä on Arduino? Open Source Electronics Prototyping Platform Arduino on avoimeen laitteistoon ja ohjelmistoon perustuva
Ohjelmointia Arduinolla Kyösti Blinnikka, Olarin koulu ja lukio LUMA-keskus Aalto Mikä on Arduino? Open Source Electronics Prototyping Platform Arduino on avoimeen laitteistoon ja ohjelmistoon perustuva
Luento 4: Liikkeen kuvausta, differentiaaliyhtälöt
 Luento 4: Liikkeen kuvausta, differentiaaliyhtälöt Digress: vakio- vs. muuttuva kiihtyvyys käytännössä Kinematiikkaa yhdessä dimensiossa taustatietoa Matlab-esittelyä 1 / 20 Luennon sisältö Digress: vakio-
Luento 4: Liikkeen kuvausta, differentiaaliyhtälöt Digress: vakio- vs. muuttuva kiihtyvyys käytännössä Kinematiikkaa yhdessä dimensiossa taustatietoa Matlab-esittelyä 1 / 20 Luennon sisältö Digress: vakio-
815338A Ohjelmointikielten periaatteet Harjoitus 6 Vastaukset
 815338A Ohjelmointikielten periaatteet 2015-2016. Harjoitus 6 Vastaukset Harjoituksen aiheena on funktionaalinen ohjelmointi Scheme- ja Haskell-kielillä. Voit suorittaa ohjelmat osoitteessa https://ideone.com/
815338A Ohjelmointikielten periaatteet 2015-2016. Harjoitus 6 Vastaukset Harjoituksen aiheena on funktionaalinen ohjelmointi Scheme- ja Haskell-kielillä. Voit suorittaa ohjelmat osoitteessa https://ideone.com/
OHJE Jos Kelaimeen kirjautuminen ei onnistu Mac-koneella Sisällys
 Sisällys 1 Varmista, että DigiSign-kortinlukijaohjelmisto on käynnissä 2 1.1 DigiSign-kuvake 2 1.2 Sovelluksen käynnistäminen 2 1.3 Kortin toiminnan varmistaminen 4 2 Jos käytät selaimena Mozilla, Firefox
Sisällys 1 Varmista, että DigiSign-kortinlukijaohjelmisto on käynnissä 2 1.1 DigiSign-kuvake 2 1.2 Sovelluksen käynnistäminen 2 1.3 Kortin toiminnan varmistaminen 4 2 Jos käytät selaimena Mozilla, Firefox
S12-11. Portaalinosturi AS-0.3200. Projektisuunnitelma 2012. Oleg Kovalev
 S12-11 Portaalinosturi AS-0.3200 Projektisuunnitelma 2012 Oleg Kovalev Sisällys 1. Työn tavoite... 3 2. Projektin osa-alueet... 3 2.1. Suunnittelu... 3 2.2. Komponenttien hankinta... 3 2.3. Valmistus...
S12-11 Portaalinosturi AS-0.3200 Projektisuunnitelma 2012 Oleg Kovalev Sisällys 1. Työn tavoite... 3 2. Projektin osa-alueet... 3 2.1. Suunnittelu... 3 2.2. Komponenttien hankinta... 3 2.3. Valmistus...
AutoCAD-natiiviobjektin toteutus
 AutoCAD-natiiviobjektin toteutus Kontiotuote OY Maailman toiseksi suurin hirsitalotoimittaja Aloittanut toimintansa 70-luvulla Liikevaihto vuonna 2003-37,355 Milj. euroa josta vientiä 7,376 Milj. euroa
AutoCAD-natiiviobjektin toteutus Kontiotuote OY Maailman toiseksi suurin hirsitalotoimittaja Aloittanut toimintansa 70-luvulla Liikevaihto vuonna 2003-37,355 Milj. euroa josta vientiä 7,376 Milj. euroa
Optimaalisen tarkastusvälin määrittäminen suun terveydenhuollossa
 Projektin väliraportti Optimaalisen tarkastusvälin määrittäminen suun terveydenhuollossa 13.4.2012 Mat-2.4117 Operaatiotutkimuksen projektityöseminaari Toimeksiantaja: Nordic Healthcare Group Projektiryhmä:
Projektin väliraportti Optimaalisen tarkastusvälin määrittäminen suun terveydenhuollossa 13.4.2012 Mat-2.4117 Operaatiotutkimuksen projektityöseminaari Toimeksiantaja: Nordic Healthcare Group Projektiryhmä:
AUTON LIIKETEHTÄVIÄ: KESKIKIIHTYVYYS ak JA HETKELLINEN KIIHTYVYYS a(t) (tangenttitulkinta) sekä matka fysikaalisena pinta-alana (t,
 (tangenttitulkinta) sekä matka fysikaalisena pinta-alana (t,") AUTON LIIKETEHTÄVIÄ: KESKIKIIHTYVYYS ak JA HETKELLINEN KIIHTYVYYS a(t) (tangenttitulkinta) sekä matka fysikaalisena pinta-alana (t, v)-koordinaatistossa ruutumenetelmällä. Tehtävä 4 (~YO-K97-1). Tekniikan
AUTON LIIKETEHTÄVIÄ: KESKIKIIHTYVYYS ak JA HETKELLINEN KIIHTYVYYS a(t) (tangenttitulkinta) sekä matka fysikaalisena pinta-alana (t, v)-koordinaatistossa ruutumenetelmällä. Tehtävä 4 (~YO-K97-1). Tekniikan
Projektisuunnitelma. (välipalautukseen muokattu versio) Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus
 Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus") Projektisuunnitelma (välipalautukseen muokattu versio) Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus Ville Toiviainen Tomi Tuovinen Lauri af Heurlin Tavoite Projektin tarkoituksena
Projektisuunnitelma (välipalautukseen muokattu versio) Vesiprosessin sekvenssiohjelmointi ja simulointiavusteinen testaus Ville Toiviainen Tomi Tuovinen Lauri af Heurlin Tavoite Projektin tarkoituksena
SIMULINK 5.0 Harjoitus. Matti Lähteenmäki 2004 www.tpu.fi/~mlahteen/
 SIMULINK 5.0 Harjoitus 2004 www.tpu.fi/~mlahteen/ SIMULINK 5.0 Harjoitus 2 Harjoitustehtävä. Tarkastellaan kuvan mukaisen yhden vapausasteen jousi-massa-vaimennin systeemin vaakasuuntaista pakkovärähtelyä,
SIMULINK 5.0 Harjoitus 2004 www.tpu.fi/~mlahteen/ SIMULINK 5.0 Harjoitus 2 Harjoitustehtävä. Tarkastellaan kuvan mukaisen yhden vapausasteen jousi-massa-vaimennin systeemin vaakasuuntaista pakkovärähtelyä,
IDL - proseduurit. ATK tähtitieteessä. IDL - proseduurit
 IDL - proseduurit 25. huhtikuuta 2017 Viimeksi käsiteltiin IDL:n interaktiivista käyttöä, mutta tämä on hyvin kömpelöä monimutkaisempia asioita tehtäessä. IDL:llä on mahdollista tehdä ns. proseduuri-tiedostoja,
IDL - proseduurit 25. huhtikuuta 2017 Viimeksi käsiteltiin IDL:n interaktiivista käyttöä, mutta tämä on hyvin kömpelöä monimutkaisempia asioita tehtäessä. IDL:llä on mahdollista tehdä ns. proseduuri-tiedostoja,
Phantom / H3-3D Gimbal Kalibrointiohjeet. Aloitus:
 Phantom / H3-3D Gimbal Kalibrointiohjeet - Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset - IMU kalibrointi
Phantom / H3-3D Gimbal Kalibrointiohjeet - Uuden kauko-ohjaimen yhdistäminen kopteriin - Kauko-ohjaimen kalibrointi - Gimbaalin kuvauskulman säätövivun X1 kalibrointi - Gimbaalin asetukset - IMU kalibrointi
ATK tähtitieteessä. Osa 3 - IDL proseduurit ja rakenteet. 18. syyskuuta 2014
 18. syyskuuta 2014 IDL - proseduurit Viimeksi käsiteltiin IDL:n interaktiivista käyttöä, mutta tämä on hyvin kömpelöä monimutkaisempia asioita tehtäessä. IDL:llä on mahdollista tehdä ns. proseduuri-tiedostoja,
18. syyskuuta 2014 IDL - proseduurit Viimeksi käsiteltiin IDL:n interaktiivista käyttöä, mutta tämä on hyvin kömpelöä monimutkaisempia asioita tehtäessä. IDL:llä on mahdollista tehdä ns. proseduuri-tiedostoja,
PID-sa a timen viritta minen Matlabilla ja simulinkilla
 PID-sa a timen viritta minen Matlabilla ja simulinkilla Kriittisen värähtelyn menetelmä Tehtiin kuvan 1 mukainen tasavirtamoottorin piiri PID-säätimellä. Virittämistä varten PID-säätimen ja asetettiin
PID-sa a timen viritta minen Matlabilla ja simulinkilla Kriittisen värähtelyn menetelmä Tehtiin kuvan 1 mukainen tasavirtamoottorin piiri PID-säätimellä. Virittämistä varten PID-säätimen ja asetettiin
GREDDY PROFEC B SPEC II säätäminen
 GREDDY PROFEC B SPEC II säätäminen Päätin tehdä tällaisen ohjeen, koska jotkut ovat sitä kyselleet suomeksi. Tämä on vapaa käännös eräästä ohjeesta, joka on suunnattu Evoille (joka on koettu toimivaksi
GREDDY PROFEC B SPEC II säätäminen Päätin tehdä tällaisen ohjeen, koska jotkut ovat sitä kyselleet suomeksi. Tämä on vapaa käännös eräästä ohjeesta, joka on suunnattu Evoille (joka on koettu toimivaksi
Harjoitustyö 3. Heiluri-vaunusysteemin parametrien estimointi
 Aalto-yliopiston perustieteiden korkeakoulu Systeemianalyysin laboratorio Mat-2.4129 Systeemien identifiointi Harjoitustyö 3 Heiluri-vaunusysteemin parametrien estimointi Yleistä Systeemianalyysin laboratoriossa
Aalto-yliopiston perustieteiden korkeakoulu Systeemianalyysin laboratorio Mat-2.4129 Systeemien identifiointi Harjoitustyö 3 Heiluri-vaunusysteemin parametrien estimointi Yleistä Systeemianalyysin laboratoriossa
Käyttäjien tunnistaminen ja käyttöoikeuksien hallinta hajautetussa ympäristössä
 www.niksula.cs.hut.fi/~jjkankaa// Testauksen loppuraportti v. 1.0 Päivitetty 23.4.2001 klo 19:05 Mikko Viljainen 2 (14) Dokumentin versiohistoria Versio Päivämäärä Tekijä / muutoksen tekijä Selite 1.0
www.niksula.cs.hut.fi/~jjkankaa// Testauksen loppuraportti v. 1.0 Päivitetty 23.4.2001 klo 19:05 Mikko Viljainen 2 (14) Dokumentin versiohistoria Versio Päivämäärä Tekijä / muutoksen tekijä Selite 1.0
MPCC-työkalua voidaan käyttää yhden laitteen valvontaan ja yhden tai useamman laitteen konfigurointiin (Modbus broadcast, osoite 0).
.") V1.0.0 (14.10.2015) 1 (7) KYTKENTÄ HUOM: toimii Modbus-masterina. Tämän vuoksi toinen mahdollinen Modbus-master on irrotettava verkosta, kun kytketään valmiiseen Modbus-verkkoon. Produalin Modbus-laitteiden
V1.0.0 (14.10.2015) 1 (7) KYTKENTÄ HUOM: toimii Modbus-masterina. Tämän vuoksi toinen mahdollinen Modbus-master on irrotettava verkosta, kun kytketään valmiiseen Modbus-verkkoon. Produalin Modbus-laitteiden
Akkujen aktiivinen balansointi
 Väliraportti 1(5) Akkujen aktiivinen balansointi Ohjaaja: Jorma Selkäinaho Työryhmä: Kalle Fagerman Johan Holmberg Otso Jousimaa Aleksi Salonen Väliraportti 2(5) Johdanto Projektimme jatkaa syksyllä aloitettua
Väliraportti 1(5) Akkujen aktiivinen balansointi Ohjaaja: Jorma Selkäinaho Työryhmä: Kalle Fagerman Johan Holmberg Otso Jousimaa Aleksi Salonen Väliraportti 2(5) Johdanto Projektimme jatkaa syksyllä aloitettua
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-03 USB-käyttöinen syvyysanturi 5op 13.9.2011-29.11.2011 Johan Backlund Ohjaaja: Johan Grönholm Johdanto Projektin tavoitteena oli suunnitella
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt A11-03 USB-käyttöinen syvyysanturi 5op 13.9.2011-29.11.2011 Johan Backlund Ohjaaja: Johan Grönholm Johdanto Projektin tavoitteena oli suunnitella
Peltorobotin akselimoduulin kontrolleri
 Peltorobotin akselimoduulin kontrolleri Automaatio- ja systeemitekniikan projektityöt B.Sc. Joni Rannisto (Mech.) Janne Hafrén (Mech.) Matti Koskinen (Mech.) Esitelmän rakenne 1. Tehtävänanto ja vaatimukset
Peltorobotin akselimoduulin kontrolleri Automaatio- ja systeemitekniikan projektityöt B.Sc. Joni Rannisto (Mech.) Janne Hafrén (Mech.) Matti Koskinen (Mech.) Esitelmän rakenne 1. Tehtävänanto ja vaatimukset
Agenda. Johdanto Säätäjiä. Mittaaminen. P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen
 8. Luento: Laitteiston ohjaaminen Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen Johdanto Tavoitteena: tunnistaa
8. Luento: Laitteiston ohjaaminen Arto Salminen, arto.salminen@tut.fi Agenda Johdanto Säätäjiä P-, I-,D-, PI-, PD-, ja PID-säätäjä Säätäjän valinta ja virittäminen Mittaaminen Johdanto Tavoitteena: tunnistaa
Ylläpitodokumentti Mooan
 Ylläpitodokumentti Mooan Helsinki 16.08.06 Ohjelmistotuotantoprojekti HELSINGIN YLIOPISTO Tietojenkäsittelytieteen laitos Kurssi 581260 Ohjelmistotuotantoprojekti (9+1op/6ov) Projektiryhmä Heikki Aitakangas
Ylläpitodokumentti Mooan Helsinki 16.08.06 Ohjelmistotuotantoprojekti HELSINGIN YLIOPISTO Tietojenkäsittelytieteen laitos Kurssi 581260 Ohjelmistotuotantoprojekti (9+1op/6ov) Projektiryhmä Heikki Aitakangas
Tieteellinen laskenta 2 Törmäykset
 Tieteellinen laskenta 2 Törmäykset Aki Kutvonen Op.nmr 013185860 Sisällysluettelo Ohjelman tekninen dokumentti...3 Yleiskuvaus...3 Kääntöohje...3 Ohjelman yleinen rakenne...4 Esimerkkiajo ja käyttöohje...5
Tieteellinen laskenta 2 Törmäykset Aki Kutvonen Op.nmr 013185860 Sisällysluettelo Ohjelman tekninen dokumentti...3 Yleiskuvaus...3 Kääntöohje...3 Ohjelman yleinen rakenne...4 Esimerkkiajo ja käyttöohje...5
Mikrokontrollerikitit - väliraportti
 Mikrokontrollerikitit - väliraportti AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Hannu Leppinen 78673R Petri Niemelä 221643 Markus Peltola 84765H 27.3.2013 Työn kuvaus Projektityön tarkoituksena
Mikrokontrollerikitit - väliraportti AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Hannu Leppinen 78673R Petri Niemelä 221643 Markus Peltola 84765H 27.3.2013 Työn kuvaus Projektityön tarkoituksena
Toteutusvaihe T2 Edistymisraportti
 Toteutusvaihe T2 Edistymisraportti Sisällysluettelo 1. Projektin tila...3 1.1. Suoritetut tehtävät...4 1.2. Käytetyt menetelmät...5 1.3. Ongelmat...6 1.4. Jatkosuunnitelmat...6 Versio- ja muutoshistoria
Toteutusvaihe T2 Edistymisraportti Sisällysluettelo 1. Projektin tila...3 1.1. Suoritetut tehtävät...4 1.2. Käytetyt menetelmät...5 1.3. Ongelmat...6 1.4. Jatkosuunnitelmat...6 Versio- ja muutoshistoria
Kon Simuloinnin Rakentaminen Janne Ojala
 Kon 16.4011 Simuloinnin Rakentaminen Janne Ojala Simulointi käytännössä 1/3 Simulaatiomalleja helppo analysoida Ymmärretään ongelmaa paremmin - Opitaan ymmärtämään koneen toimintaa ja siihen vaikuttavia
Kon 16.4011 Simuloinnin Rakentaminen Janne Ojala Simulointi käytännössä 1/3 Simulaatiomalleja helppo analysoida Ymmärretään ongelmaa paremmin - Opitaan ymmärtämään koneen toimintaa ja siihen vaikuttavia
Moodle-oppimisympäristö
 k5kcaptivate Moodle-oppimisympäristö Opiskelijan opas Sisältö 1. Mikä on Moodle? 2. Mistä löydän Moodlen? 3. Kuinka muokkaan käyttäjätietojani? 4. Kuinka ilmoittaudun kurssille? 5. Kuinka käytän Moodlen
k5kcaptivate Moodle-oppimisympäristö Opiskelijan opas Sisältö 1. Mikä on Moodle? 2. Mistä löydän Moodlen? 3. Kuinka muokkaan käyttäjätietojani? 4. Kuinka ilmoittaudun kurssille? 5. Kuinka käytän Moodlen
Integrointialgoritmit molekyylidynamiikassa
 Integrointialgoritmit molekyylidynamiikassa Markus Ovaska 28.11.2008 Esitelmän kulku MD-simulaatiot yleisesti Integrointialgoritmit: mitä integroidaan ja miten? Esimerkkejä eri algoritmeista Hyvän algoritmin
Integrointialgoritmit molekyylidynamiikassa Markus Ovaska 28.11.2008 Esitelmän kulku MD-simulaatiot yleisesti Integrointialgoritmit: mitä integroidaan ja miten? Esimerkkejä eri algoritmeista Hyvän algoritmin
Väliraportti: Vesipistekohtainen veden kulutuksen seuranta, syksy Mikko Kyllönen Matti Marttinen Vili Tuomisaari
 Väliraportti: Vesipistekohtainen veden kulutuksen seuranta, syksy 2015 Mikko Kyllönen Matti Marttinen Vili Tuomisaari Projektin eteneminen Projekti on edennyt syksyn aikana melko vaikeasti. Aikataulujen
Väliraportti: Vesipistekohtainen veden kulutuksen seuranta, syksy 2015 Mikko Kyllönen Matti Marttinen Vili Tuomisaari Projektin eteneminen Projekti on edennyt syksyn aikana melko vaikeasti. Aikataulujen
TIEP114 Tietokoneen rakenne ja arkkitehtuuri, 3 op. FT Ari Viinikainen
 TIEP114 Tietokoneen rakenne ja arkkitehtuuri, 3 op FT Ari Viinikainen Tietokoneen rakenne Keskusyksikkö, CPU Keskusmuisti Aritmeettislooginen yksikkö I/O-laitteet Kontrolliyksikkö Tyypillinen Von Neumann
TIEP114 Tietokoneen rakenne ja arkkitehtuuri, 3 op FT Ari Viinikainen Tietokoneen rakenne Keskusyksikkö, CPU Keskusmuisti Aritmeettislooginen yksikkö I/O-laitteet Kontrolliyksikkö Tyypillinen Von Neumann
FYSIIKKA (FY91): 9. KURSSI: Kertauskurssi KOE 30.01.2014 VASTAA KUUTEEN (6) TEHTÄVÄÄN!!
: 9. KURSSI: Kertauskurssi KOE 30.01.2014 VASTAA KUUTEEN (6) TEHTÄVÄÄN!!") FYSIIKKA (FY91): 9. KURSSI: Kertauskurssi KOE 30.01.2014 VASTAA KUUTEEN (6) TEHTÄVÄÄN!! 1. Vastaa, ovatko seuraavat väittämät oikein vai väärin. Perustelua ei tarvitse kirjoittaa. a) Atomi ei voi lähettää
FYSIIKKA (FY91): 9. KURSSI: Kertauskurssi KOE 30.01.2014 VASTAA KUUTEEN (6) TEHTÄVÄÄN!! 1. Vastaa, ovatko seuraavat väittämät oikein vai väärin. Perustelua ei tarvitse kirjoittaa. a) Atomi ei voi lähettää
Ohjelmointi 1 / syksy /20: IDE
 Ohjelmointi 1 / syksy 2007 10/20: IDE Paavo Nieminen nieminen@jyu.fi Tietotekniikan laitos Informaatioteknologian tiedekunta Jyväskylän yliopisto Ohjelmointi 1 / syksy 2007 p.1/8 Tämän luennon rakenne
Ohjelmointi 1 / syksy 2007 10/20: IDE Paavo Nieminen nieminen@jyu.fi Tietotekniikan laitos Informaatioteknologian tiedekunta Jyväskylän yliopisto Ohjelmointi 1 / syksy 2007 p.1/8 Tämän luennon rakenne
ONE 118 OHJELMOITAVA PÄÄVAHVISTIN
 10 ohjelmoitavaa UHF- kanavanippua 3 erillistä UHF tuloa; UHF1 UHF2 UHF3 Laajakaistatulo VHF I +ULA Laajakaistatulo VHF III + DAB UHF filtteri 1 5 kanavan levyinen; 8-40 MHz Automaattinen skannaus UHF-
10 ohjelmoitavaa UHF- kanavanippua 3 erillistä UHF tuloa; UHF1 UHF2 UHF3 Laajakaistatulo VHF I +ULA Laajakaistatulo VHF III + DAB UHF filtteri 1 5 kanavan levyinen; 8-40 MHz Automaattinen skannaus UHF-
Projektisuunnitelma: Vesipistekohtainen veden kulutuksen seuranta, syksy Mikko Kyllönen Matti Marttinen Vili Tuomisaari
 Projektisuunnitelma: Vesipistekohtainen veden kulutuksen seuranta, syksy 2015 Mikko Kyllönen Matti Marttinen Vili Tuomisaari Projektin tavoite Tämän projektin tavoitteena on kehittää prototyyppi järjestelmästä,
Projektisuunnitelma: Vesipistekohtainen veden kulutuksen seuranta, syksy 2015 Mikko Kyllönen Matti Marttinen Vili Tuomisaari Projektin tavoite Tämän projektin tavoitteena on kehittää prototyyppi järjestelmästä,
AS Automaatio ja systeemitekniikan projektityöt Projektisuunnitelma Syksy 2009 A09 05 OSGi IRC Bot For Coffee Maker
 AS 0.3200 Automaatio ja systeemitekniikan projektityöt Projektisuunnitelma Syksy 2009 A09 05 OSGi IRC Bot For Coffee Maker Henri Nieminen Juha Sironen Palautettu: 21.9.2009 Nieminen, Sironen Sisällysluettelo
AS 0.3200 Automaatio ja systeemitekniikan projektityöt Projektisuunnitelma Syksy 2009 A09 05 OSGi IRC Bot For Coffee Maker Henri Nieminen Juha Sironen Palautettu: 21.9.2009 Nieminen, Sironen Sisällysluettelo
Autentikoivan lähtevän postin palvelimen asetukset
 Autentikoivan lähtevän postin palvelimen asetukset - Avaa Työkalut valikko ja valitse Tilien asetukset - Valitse vasemman reunan lokerosta Lähtevän postin palvelin (SM - Valitse listasta palvelin, jonka
Autentikoivan lähtevän postin palvelimen asetukset - Avaa Työkalut valikko ja valitse Tilien asetukset - Valitse vasemman reunan lokerosta Lähtevän postin palvelin (SM - Valitse listasta palvelin, jonka
TAMPEREEN TEKNILLINEN YLIOPISTO Digitaali- ja tietokonetekniikan laitos. Harjoitustyö 4: Cache, osa 2
 TAMPEREEN TEKNILLINEN YLIOPISTO Digitaali- ja tietokonetekniikan laitos TKT-3200 Tietokonetekniikka I Harjoitustyö 4: Cache, osa 2.. 2010 Ryhmä Nimi Op.num. 1 Valmistautuminen Cache-työn toisessa osassa
TAMPEREEN TEKNILLINEN YLIOPISTO Digitaali- ja tietokonetekniikan laitos TKT-3200 Tietokonetekniikka I Harjoitustyö 4: Cache, osa 2.. 2010 Ryhmä Nimi Op.num. 1 Valmistautuminen Cache-työn toisessa osassa
SAS-ohjelmiston perusteet 2010
 SAS-ohjelmiston perusteet 2010 Luentorunko/päiväkirja Ari Virtanen 11.1.10 päivitetään luentojen edetessä Ilmoitusasioita Opintojakso suoritustapana on aktiivinen osallistuminen harjoituksiin ja harjoitustehtävien
SAS-ohjelmiston perusteet 2010 Luentorunko/päiväkirja Ari Virtanen 11.1.10 päivitetään luentojen edetessä Ilmoitusasioita Opintojakso suoritustapana on aktiivinen osallistuminen harjoituksiin ja harjoitustehtävien
OHJELMOINTILAITE 10/50
 OHJELMOINTILAITE 10/50 1 2 3 4 5 6 17 16 15 7 14 8 13 12 11 10 9 1) Näyttö 1 taivutuksen nro. 2) Näyttö 2 kulma 3) LED merkkivalo MANUAALI 4) OFF-SET. 5) Taivutussuunta. 6) Palautus 7) Käynnistys ja resetointi.
OHJELMOINTILAITE 10/50 1 2 3 4 5 6 17 16 15 7 14 8 13 12 11 10 9 1) Näyttö 1 taivutuksen nro. 2) Näyttö 2 kulma 3) LED merkkivalo MANUAALI 4) OFF-SET. 5) Taivutussuunta. 6) Palautus 7) Käynnistys ja resetointi.
Uutiskirjesovelluksen käyttöohje
 Uutiskirjesovelluksen käyttöohje Käyttäjätuki: Suomen Golfpiste Oy Esterinportti 1 00240 HELSINKI Puhelin: (09) 1566 8800 Fax: (09) 1566 8801 E-mail: gp@golfpiste.com 2 Sisällys Johdanto... 1 Päänavigointi...
Uutiskirjesovelluksen käyttöohje Käyttäjätuki: Suomen Golfpiste Oy Esterinportti 1 00240 HELSINKI Puhelin: (09) 1566 8800 Fax: (09) 1566 8801 E-mail: gp@golfpiste.com 2 Sisällys Johdanto... 1 Päänavigointi...
MixW ja Dx-vihjeet (ohje) oh3htu 10.9.2009
 oh3htu 10.9.2009") MixW ja Dx-vihjeet (ohje) oh3htu 10.9.2009 MixW:n käyttäjille mieleen on saada DX-vihjeet MixW:n Dxcluster dialog-ikkunaan sen monipuolisuuden ansiosta. Dxcluster dialog-ikkunassa on muun muassa helposti
MixW ja Dx-vihjeet (ohje) oh3htu 10.9.2009 MixW:n käyttäjille mieleen on saada DX-vihjeet MixW:n Dxcluster dialog-ikkunaan sen monipuolisuuden ansiosta. Dxcluster dialog-ikkunassa on muun muassa helposti
2009 Mat-2.4177 Operaatiotutkimuksen Projektityöseminaari L
 2009 Mat-2.4177 Operaatiotutkimuksen Projektityöseminaari L Väliraportti 25.2.2009 Puustokuvioiden korjuukelpoisuus- ja saavutettavuusanalyysi Juha Valvanne Juho Matikainen Joni Nurmentaus Lasse Östring
2009 Mat-2.4177 Operaatiotutkimuksen Projektityöseminaari L Väliraportti 25.2.2009 Puustokuvioiden korjuukelpoisuus- ja saavutettavuusanalyysi Juha Valvanne Juho Matikainen Joni Nurmentaus Lasse Östring
Pedacode Pikaopas. Java-kehitysympäristön pystyttäminen
 Pedacode Pikaopas Java-kehitysympäristön pystyttäminen Pikaoppaan sisältö Pikaoppaassa kuvataan, miten Windowstyöasemalle asennetaan Java-ohjelmoinnissa tarvittavat työkalut, minkälaisia konfigurointeja
Pedacode Pikaopas Java-kehitysympäristön pystyttäminen Pikaoppaan sisältö Pikaoppaassa kuvataan, miten Windowstyöasemalle asennetaan Java-ohjelmoinnissa tarvittavat työkalut, minkälaisia konfigurointeja
LOPPURAPORTTI Paperikonekilta Versio 1.0
 Loppuraportti LITA/TIKO/PAPERIKONEKILTA 1 (14) 18.5.2009 LOPPURAPORTTI Paperikonekilta Versio 1.0 Tekijät: Jaakko Karhunen Jani Hyvönen TIKO, IT-Dynamo 5.kerros Osoite: Tietojenkäsittelyn koulutusohjelma
Loppuraportti LITA/TIKO/PAPERIKONEKILTA 1 (14) 18.5.2009 LOPPURAPORTTI Paperikonekilta Versio 1.0 Tekijät: Jaakko Karhunen Jani Hyvönen TIKO, IT-Dynamo 5.kerros Osoite: Tietojenkäsittelyn koulutusohjelma
SUMO-ROBOTTI. Tehtävä
 SUMO-ROBOTTI Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla yksinkertainen Sumorobotti. Robotti ohjelmoidaan liikkumaan autonomisesti (ilman ohjausta) ja tunnistamaan mustan ottelualustan
SUMO-ROBOTTI Tehtävä Rakentaa ja ohjelmoida Lego Mindstorms NXT-sarjalla yksinkertainen Sumorobotti. Robotti ohjelmoidaan liikkumaan autonomisesti (ilman ohjausta) ja tunnistamaan mustan ottelualustan
Luku 8. Aluekyselyt. 8.1 Summataulukko
 Luku 8 Aluekyselyt Aluekysely on tiettyä taulukon väliä koskeva kysely. Tyypillisiä aluekyselyitä ovat, mikä on taulukon välin lukujen summa tai pienin luku välillä. Esimerkiksi seuraavassa taulukossa
Luku 8 Aluekyselyt Aluekysely on tiettyä taulukon väliä koskeva kysely. Tyypillisiä aluekyselyitä ovat, mikä on taulukon välin lukujen summa tai pienin luku välillä. Esimerkiksi seuraavassa taulukossa
T Testiraportti - järjestelmätestaus
 T-76.115 Testiraportti - järjestelmätestaus 18. huhtikuuta 2002 Confuse 1 Tila Versio: 1.0 Tila: Päivitetty Jakelu: Julkinen Luotu: 18.04.2002 Jani Myyry Muutettu viimeksi: 18.04.2002 Jani Myyry Versiohistoria
T-76.115 Testiraportti - järjestelmätestaus 18. huhtikuuta 2002 Confuse 1 Tila Versio: 1.0 Tila: Päivitetty Jakelu: Julkinen Luotu: 18.04.2002 Jani Myyry Muutettu viimeksi: 18.04.2002 Jani Myyry Versiohistoria
Kon Konepajojen tuotannonohjaus: ILOG CPLEX Studion käyttö
 Kon-15.4199 Konepajojen tuotannonohjaus: ILOG CPLEX Studion käyttö 22.1.2016 Harjoituksessa 1. Varmistetaan että kaikilla on pari! Ilmoittautukaa oodissa etukäteen! 2. Tutustutaan ensimmäiseen tehtävään
Kon-15.4199 Konepajojen tuotannonohjaus: ILOG CPLEX Studion käyttö 22.1.2016 Harjoituksessa 1. Varmistetaan että kaikilla on pari! Ilmoittautukaa oodissa etukäteen! 2. Tutustutaan ensimmäiseen tehtävään
Four Ferries Oy:n nopea kokeilu Helsingin kouluissa Helsingin koulujen nopeiden kokeilujen ohjelma II, kevätlukukausi 2019
 Julkinen loppuraportti 30.07.2019 Four Ferries Oy:n nopea kokeilu Helsingin kouluissa Helsingin koulujen nopeiden kokeilujen ohjelma II, kevätlukukausi 2019 Kokeilun tavoitteet Four Ferries Checker on
Julkinen loppuraportti 30.07.2019 Four Ferries Oy:n nopea kokeilu Helsingin kouluissa Helsingin koulujen nopeiden kokeilujen ohjelma II, kevätlukukausi 2019 Kokeilun tavoitteet Four Ferries Checker on
Maha Eurosystem jarrulaskentaohjelman asennusohje versio 7.20.026
 2012 Tecalemit Oy Seppo Koskivuori Maha Eurosystem jarrulaskentaohjelman asennusohje versio 7.20.026 Vaatimukset: - tietokone (PC), jossa vapaa USB portti - käyttöjärjestelmä Windows XP, Vista tai Windows
2012 Tecalemit Oy Seppo Koskivuori Maha Eurosystem jarrulaskentaohjelman asennusohje versio 7.20.026 Vaatimukset: - tietokone (PC), jossa vapaa USB portti - käyttöjärjestelmä Windows XP, Vista tai Windows
Puhelinnumeroiden lataaminen laitteesta tietokoneelle
 OHJE 1/9 Yleistä Saunalahti on lähettänyt asiakkaillemme uuden SIM kortin. Kaikki Saunalahden SIM kortit tulevat vaihtumaan jollakin aikajaksolla Saunalahden siirryttyä palveluoperaattorista virtuaalioperaattoriksi.
OHJE 1/9 Yleistä Saunalahti on lähettänyt asiakkaillemme uuden SIM kortin. Kaikki Saunalahden SIM kortit tulevat vaihtumaan jollakin aikajaksolla Saunalahden siirryttyä palveluoperaattorista virtuaalioperaattoriksi.
Testausdokumentti. Kivireki. Helsinki Ohjelmistotuotantoprojekti HELSINGIN YLIOPISTO Tietojenkäsittelytieteen laitos
 Testausdokumentti Kivireki Helsinki 17.12.2007 Ohjelmistotuotantoprojekti HELSINGIN YLIOPISTO Tietojenkäsittelytieteen laitos Kurssi 581260 Ohjelmistotuotantoprojekti (6 ov) Projektiryhmä Anu Kontio Ilmari
Testausdokumentti Kivireki Helsinki 17.12.2007 Ohjelmistotuotantoprojekti HELSINGIN YLIOPISTO Tietojenkäsittelytieteen laitos Kurssi 581260 Ohjelmistotuotantoprojekti (6 ov) Projektiryhmä Anu Kontio Ilmari
KJR-C1001 Statiikka ja dynamiikka. Luento Susanna Hurme
 KJR-C1001 Statiikka ja dynamiikka Luento 22.3.2016 Susanna Hurme Päivän aihe: Rotaatioliikkeen kinematiikka: kulmanopeus ja -kiihtyvyys (Kirjan luvut 12.7, 16.3) Osaamistavoitteet Osata analysoida jäykän
KJR-C1001 Statiikka ja dynamiikka Luento 22.3.2016 Susanna Hurme Päivän aihe: Rotaatioliikkeen kinematiikka: kulmanopeus ja -kiihtyvyys (Kirjan luvut 12.7, 16.3) Osaamistavoitteet Osata analysoida jäykän
Automaattinen yksikkötestaus
 Teknillinen Korkeakoulu T-76.115 Tietojenkäsittelyopin ohjelmatyö Lineaaristen rajoitteiden tyydyttämistehtävän ratkaisija L models Automaattinen yksikkötestaus Ryhmä Rajoitteiset Versio Päivämäärä Tekijä
Teknillinen Korkeakoulu T-76.115 Tietojenkäsittelyopin ohjelmatyö Lineaaristen rajoitteiden tyydyttämistehtävän ratkaisija L models Automaattinen yksikkötestaus Ryhmä Rajoitteiset Versio Päivämäärä Tekijä
VIS Online 2.0 version uudistukset
 VIS Online 2.0 version uudistukset Tämä dokumentti kuvaa VIS Online 2.0 julkaisun erot VIS Online 1.0:aan nähden. Dokumentti on tarkoitettu vanhan VIS Online 1.0 version käyttäjille siirryttäessä uuden
VIS Online 2.0 version uudistukset Tämä dokumentti kuvaa VIS Online 2.0 julkaisun erot VIS Online 1.0:aan nähden. Dokumentti on tarkoitettu vanhan VIS Online 1.0 version käyttäjille siirryttäessä uuden
Figure 1: Projektipäälliköt Juha-Pekka Honkavaara ja Juha Mattila
 1 Käytettävyysryhmä 1.1 Yleistä Tämän vuoden käytettävyystiimi (Uteam) perustuu kahden viime vuoden pohjalle. Uteam oli toiminnassa ensimmäisen kerran siis lukuvuonna 2005-2006. Uteamin projektiryhmä koostui
1 Käytettävyysryhmä 1.1 Yleistä Tämän vuoden käytettävyystiimi (Uteam) perustuu kahden viime vuoden pohjalle. Uteam oli toiminnassa ensimmäisen kerran siis lukuvuonna 2005-2006. Uteamin projektiryhmä koostui
 1. Algoritmi 1.1 Sisällys Algoritmin määritelmä. Aiheen pariin johdatteleva esimerkki. Muuttujat ja operaatiot (sijoitus, aritmetiikka ja vertailu). Algoritmista ohjelmaksi. 1.2 Algoritmin määritelmä Ohjelmointi
1. Algoritmi 1.1 Sisällys Algoritmin määritelmä. Aiheen pariin johdatteleva esimerkki. Muuttujat ja operaatiot (sijoitus, aritmetiikka ja vertailu). Algoritmista ohjelmaksi. 1.2 Algoritmin määritelmä Ohjelmointi
Power Steering for ATV
 AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Power Steering for ATV 15.1. - Loppuraportti Työn valvoja: Ville Matikainen Projektin tekijät: Juuso Meriläinen Antti Alakiikonen Aleksi Vulli Juuso
AS-0.3200 Automaatio- ja systeemitekniikan projektityöt Power Steering for ATV 15.1. - Loppuraportti Työn valvoja: Ville Matikainen Projektin tekijät: Juuso Meriläinen Antti Alakiikonen Aleksi Vulli Juuso
COTOOL dokumentaatio Testausdokumentit
 Table of Contents Testausraportti.............................................................................. 1 1 Tiivistelmä...............................................................................
Table of Contents Testausraportti.............................................................................. 1 1 Tiivistelmä...............................................................................
NUUO ETÄOHJELMA PIKAOPAS. Maahantuoja Dasys Oy Kaivolahdenkatu 6 00810 HELSINKI helpdesk@dasys.fi www.dasys.fi
 Maahantuoja Dasys Oy Kaivolahdenkatu 6 00810 HELSINKI helpdesk@dasys.fi www.dasys.fi NUUO ETÄOHJELMA PIKAOPAS 1.0 Tallenteiden haku ja kamerakuvien katselu DASYS-NUUO Tallentimien mukana tulee cd-levy
Maahantuoja Dasys Oy Kaivolahdenkatu 6 00810 HELSINKI helpdesk@dasys.fi www.dasys.fi NUUO ETÄOHJELMA PIKAOPAS 1.0 Tallenteiden haku ja kamerakuvien katselu DASYS-NUUO Tallentimien mukana tulee cd-levy
KÄYTTÖOHJE E-MANAGER Kylvötekniikka versio 9.66 / 9.68
 KÄYTTÖOHJE E-MANAGER Kylvötekniikka versio 9.66 / 9.68 LUE KÄYTTÖOHJE HUOLELLISESTI ENNEN KÄYTTÖÖNOTTOA! SÄILYTÄ KÄYTTÖOHJE! ART.: PAINOS : 80661809 07/2015 - Alkuperäisen käyttöohjeen käännös - Koneen
KÄYTTÖOHJE E-MANAGER Kylvötekniikka versio 9.66 / 9.68 LUE KÄYTTÖOHJE HUOLELLISESTI ENNEN KÄYTTÖÖNOTTOA! SÄILYTÄ KÄYTTÖOHJE! ART.: PAINOS : 80661809 07/2015 - Alkuperäisen käyttöohjeen käännös - Koneen